
検査データと組み合わせて設計データを使用するための方法及びシステム
【課題】検査データと組み合わせて設計データを使用するためのさまざまな方法及びシステムが実現される。
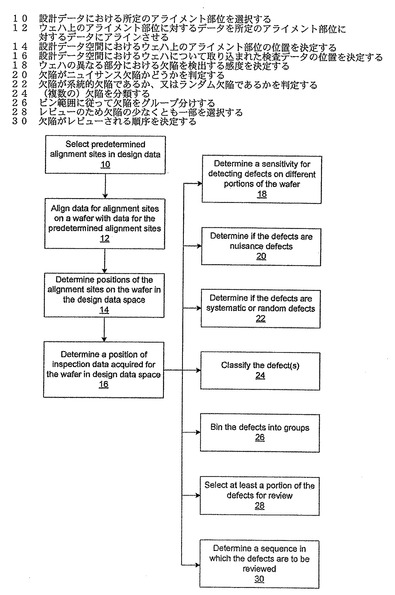
【解決手段】設計データ空間における検査データの位置を決定するための一コンピュータ実施方法は、ウェハ上のアライメント部位に対する検査システムにより取り込まれたデータを所定のアライメント部位に対するデータにアラインさせることを含む。この方法は、さらに、設計データ空間における所定のアライメント部位の位置に基づいて設計データ空間におけるウェハ上のアライメント部位の位置を決定することを含む。それに加えて、この方法は、設計データ空間におけるウェハ上のアライメント部位の位置に基づいて設計データ空間における検査システムによりそのウェハについて取り込まれた検査データの位置を決定することを含む。一実施形態では、検査データの位置は、サブピクセル精度で決定される。
【解決手段】設計データ空間における検査データの位置を決定するための一コンピュータ実施方法は、ウェハ上のアライメント部位に対する検査システムにより取り込まれたデータを所定のアライメント部位に対するデータにアラインさせることを含む。この方法は、さらに、設計データ空間における所定のアライメント部位の位置に基づいて設計データ空間におけるウェハ上のアライメント部位の位置を決定することを含む。それに加えて、この方法は、設計データ空間におけるウェハ上のアライメント部位の位置に基づいて設計データ空間における検査システムによりそのウェハについて取り込まれた検査データの位置を決定することを含む。一実施形態では、検査データの位置は、サブピクセル精度で決定される。
Notice: Undefined index: DEJ in /mnt/www/gzt_disp.php on line 298
【特許請求の範囲】
【請求項1】
設計データ空間における検査データの位置を決定するためのコンピュータ実施方法であって、
以下のステップを実行するためにコンピュータシステムを使用することを含み、
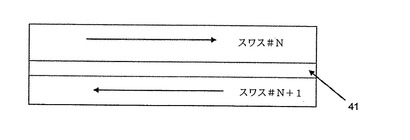
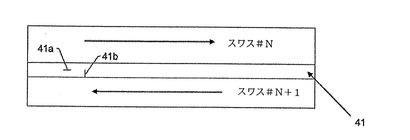
ウェハ上のアライメント部位について検査システムにより取り込まれたデータを所定のアライメント部位に対するデータにアラインさせるステップであって、アラインされる前記アライメント部位に対するデータは前記ウェハに対する前記検査システムにより取り込まれた検査データの複数のスワスのそれぞれにおけるデータを含み、前記アライメント部位は前記複数のスワスのそれぞれにおける少なくとも1つのアライメント部位を含むステップと、
前記設計データ空間における前記所定のアライメント部位の位置に基づいて前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つの前記アライメント部位の位置を決定するステップと、
前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つの前記アライメント部位の前記位置に基づいて前記設計データ空間における前記複数のスワスのそれぞれにおける前記検査データの位置を決定するステップと、
前記設計データ空間における前記検査データの前記位置と前記設計データ空間における設計データの1つ又は複数の属性と、前記検査データの1つ又は複数の属性とに基づいて、前記ウェハの異なる部分で欠陥を検出する感度を決定するステップであって、前記検査データの1つ又は複数の属性は、欠陥が前記異なる部分において検出された場合に1つ又は複数のイメージ・ノイズ属性、又はその何らかの組合せを含むステップと、
を含むコンピュータ実施方法。
【請求項2】
前記方法は、前記ウェハの検査時に実行される、請求項1に記載の方法。
【請求項3】
前記ウェハ上の前記アライメント部位に対するデータはスキャンされたイメージを含み、前記所定のアライメント部位に対するデータは設計データを含む、請求項1に記載の方法。
【請求項4】
前記ウェハ上の前記アライメント部位に対するデータはスキャンされたイメージを含み、前記所定のアライメント部位に対するデータは設計のクリップを含む、請求項1に記載の方法。
【請求項5】
前記検査データの前記位置は、サブピクセル精度で決定される請求項1に記載の方法。
【請求項6】
さらに、複数のスワスのそれぞれにおける少なくとも1つの所定のアライメント部位が存在するように前記ウェハに対する設計データから前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項7】
前記アラインさせるステップは前記ウェハに対する欠陥検出の前に実行される請求項1に記載の方法。
【請求項8】
さらに、前記ウェハ上の前記アライメント部位に対するデータと前記所定のアライメント部位に対するデータとの間のオフセットを前記アラインさせるステップに基づいて決定することを含み、前記検査データの位置を決定することは前記オフセットと前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つのアライメント部位の位置とを使用して実行される請求項1に記載の方法。
【請求項9】
前記方法のセットアップはオフツールで実行される請求項1に記載の方法。
【請求項10】
前記方法のセットアップはオンツールで実行される請求項1に記載の方法。
【請求項11】
さらに、前記ウェハに対する設計データを前記複数のスワスのそれぞれに対応する部分に分離することにより前記所定のアライメント部位を選択することと、前記複数のスワスのそれぞれにおける少なくとも1つの所定のアライメント部位を識別し選択するために前記設計データを探索することとを含む請求項1に記載の方法。
【請求項12】
さらに、前記ウェハに対する設計データから前記所定のアライメント部位に対する設計クリップを抽出することと前記抽出された設計クリップを前記ウェハの検査のための前記検査システムによって使用されるファイルに格納することとを含む請求項1に記載の方法。
【請求項13】
さらに、前記ウェハの検査のための前記検査システムによって使用されるための1つまたはそれ以上の光学モードとピクセル・サイズについての情報を使用して前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項14】
さらに、前記検査システムと前記ウェハのための前記検査システムによって使用されるための検査プロセスとに適合する所定のアライメント部位を選択するために、前処理した設計データによって前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項15】
さらに、前記検査システムを使用してウェハ上のダイの列をスキャンすることと、ユニークなアライメント部位を識別するためにダイのそれぞれのフレームを処理することとによって、前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項16】
さらに、適切な所定のアライメント部位を選択するために検査のための前記検査システムの最良のイメージング・モードを使用して前記ウェハをスキャンすることと、前記所定のアライメント部位に対するシミュレートされたイメージ又は前記所定のアライメント部位に対する設計のクリップに最もよく一致するイメージとなる前記検査システムの前記モードを使用して光学パッチ・イメージを取り込むために前記選択された所定のアライメント部位を再び訪れることとを含む請求項1に記載の方法。
【請求項17】
前記アライメント部位は前記複数のスワスのそれぞれにおける1つ以上のアライメント部位を含む請求項1に記載の方法。
【請求項18】
前記アライメント部位は拡大縮小誤差を補正するために前記複数のスワスのそれぞれにおける1つ以上のアライメント部位を含む請求項1に記載の方法。
【請求項19】
前記所定のアライメント部位は前記ウェハ上の1つのダイ上で所定の頻度により選択される請求項1に記載の方法。
【請求項20】
前記所定のアライメント部位は所定の最小距離間隔で前記ウェハ上のダイ上に分散されている請求項1に記載の方法。
【請求項21】
さらに、前記検査システムにおけるステージの位置精度、回転誤差、x及びy平行移動誤差、拡大縮小誤差、又はその何らかの組合せを補正するために前記検査システムを前記アライメント部位にアラインすることを含む請求項1に記載の方法。
【請求項22】
さらに、組み合わせることで前記少なくとも1つのアライメント部位の位置を決定するステップのための十分なアライメント情報をもたらすアライメント・フィーチャの集合を含むように前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項23】
前記検査システムは前記ウェハの検査のために明視野モードを使用するように構成されている請求項1に記載の方法。
【請求項24】
前記検査システムは前記ウェハの検査のために暗視野モードを使用するように構成されている請求項1に記載の方法。
【請求項25】
前記検査システムは前記ウェハの検査のために電子ビーム・イメージング・モードを使用するように構成されている請求項1に記載の方法。
【請求項26】
前記設計データの前記1つ又は複数の属性は、前記異なる部分においてすでに検出されている欠陥の歩留まりクリティカル度、前記異なる部分においてすでに検出されている前記欠陥の故障確率、又はそれらの何らかの組合せに基づいて選択される請求項1に記載の方法。
【請求項27】
前記感度を決定するステップは、さらに、前記設計データ空間における前記検査データの前記位置及びコンテキスト・マップに基づいて前記ウェハの前記異なる部分で欠陥を検出する前記感度を決定することを含み、前記コンテキスト・マップは、前記設計データ空間における前記ウェハに対する前記設計データの前記1つ又は複数の属性に対する値を含む請求項1に記載の方法。
【請求項28】
前記検査データは、前記ウェハ上の欠陥に対するデータを含み、前記方法は、さらに、前記設計データ空間における前記検査データの前記位置に基づいて、前記設計データ空間における前記欠陥の位置を決定することと、前記設計データ空間における前記欠陥の前記位置と前記設計データ空間における設計データの1つ又は複数の属性とに基づいて、前記欠陥がニュイサンス欠陥であるかどうかを判定することと、前記設計データ空間における前記設計データの前記1つ又は複数の属性に基づいてニュイサンス欠陥であると判定されない前記欠陥が系統的欠陥であるか、又はランダム欠陥であるかを判定することとを含む請求項1に記載の方法。
【請求項29】
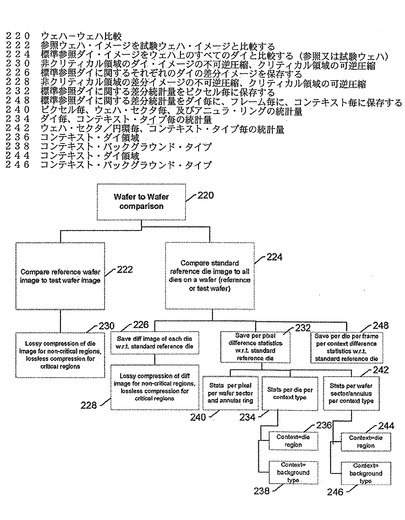
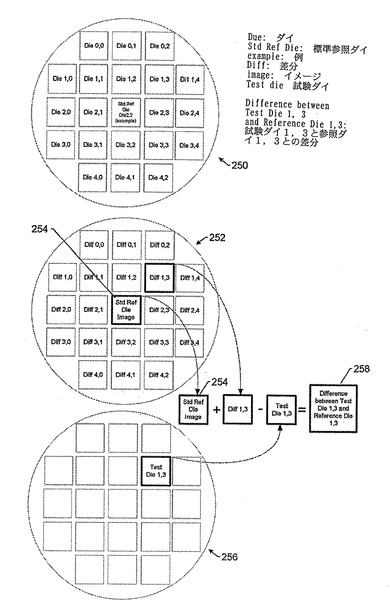
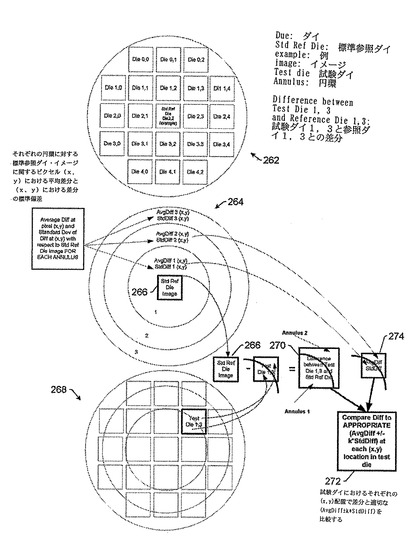
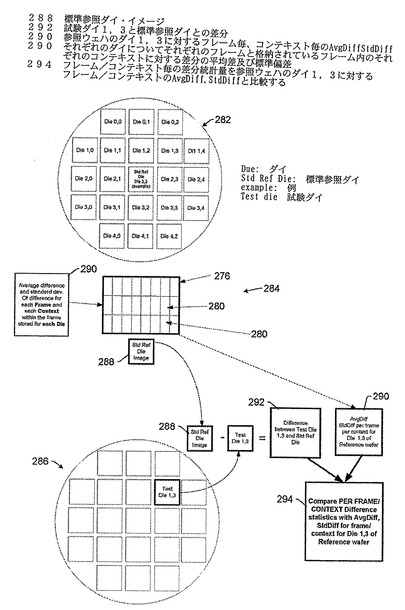
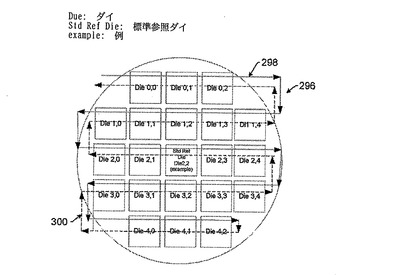
前記ウェハと追加のウェハは、ウェハ・レベルのプロセス・パラメータ変調を使用して処理され、前記方法は、前記ウェハと前記追加のウェハのダイに対する検査データを、共通の標準参照ダイと比較することにより前記ウェハと前記追加のウェハの欠陥を検出することをさらに含む請求項1に記載の方法。
【請求項1】
設計データ空間における検査データの位置を決定するためのコンピュータ実施方法であって、
以下のステップを実行するためにコンピュータシステムを使用することを含み、
ウェハ上のアライメント部位について検査システムにより取り込まれたデータを所定のアライメント部位に対するデータにアラインさせるステップであって、アラインされる前記アライメント部位に対するデータは前記ウェハに対する前記検査システムにより取り込まれた検査データの複数のスワスのそれぞれにおけるデータを含み、前記アライメント部位は前記複数のスワスのそれぞれにおける少なくとも1つのアライメント部位を含むステップと、
前記設計データ空間における前記所定のアライメント部位の位置に基づいて前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つの前記アライメント部位の位置を決定するステップと、
前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つの前記アライメント部位の前記位置に基づいて前記設計データ空間における前記複数のスワスのそれぞれにおける前記検査データの位置を決定するステップと、
前記設計データ空間における前記検査データの前記位置と前記設計データ空間における設計データの1つ又は複数の属性と、前記検査データの1つ又は複数の属性とに基づいて、前記ウェハの異なる部分で欠陥を検出する感度を決定するステップであって、前記検査データの1つ又は複数の属性は、欠陥が前記異なる部分において検出された場合に1つ又は複数のイメージ・ノイズ属性、又はその何らかの組合せを含むステップと、
を含むコンピュータ実施方法。
【請求項2】
前記方法は、前記ウェハの検査時に実行される、請求項1に記載の方法。
【請求項3】
前記ウェハ上の前記アライメント部位に対するデータはスキャンされたイメージを含み、前記所定のアライメント部位に対するデータは設計データを含む、請求項1に記載の方法。
【請求項4】
前記ウェハ上の前記アライメント部位に対するデータはスキャンされたイメージを含み、前記所定のアライメント部位に対するデータは設計のクリップを含む、請求項1に記載の方法。
【請求項5】
前記検査データの前記位置は、サブピクセル精度で決定される請求項1に記載の方法。
【請求項6】
さらに、複数のスワスのそれぞれにおける少なくとも1つの所定のアライメント部位が存在するように前記ウェハに対する設計データから前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項7】
前記アラインさせるステップは前記ウェハに対する欠陥検出の前に実行される請求項1に記載の方法。
【請求項8】
さらに、前記ウェハ上の前記アライメント部位に対するデータと前記所定のアライメント部位に対するデータとの間のオフセットを前記アラインさせるステップに基づいて決定することを含み、前記検査データの位置を決定することは前記オフセットと前記設計データ空間における前記複数のスワスのそれぞれにおける少なくとも1つのアライメント部位の位置とを使用して実行される請求項1に記載の方法。
【請求項9】
前記方法のセットアップはオフツールで実行される請求項1に記載の方法。
【請求項10】
前記方法のセットアップはオンツールで実行される請求項1に記載の方法。
【請求項11】
さらに、前記ウェハに対する設計データを前記複数のスワスのそれぞれに対応する部分に分離することにより前記所定のアライメント部位を選択することと、前記複数のスワスのそれぞれにおける少なくとも1つの所定のアライメント部位を識別し選択するために前記設計データを探索することとを含む請求項1に記載の方法。
【請求項12】
さらに、前記ウェハに対する設計データから前記所定のアライメント部位に対する設計クリップを抽出することと前記抽出された設計クリップを前記ウェハの検査のための前記検査システムによって使用されるファイルに格納することとを含む請求項1に記載の方法。
【請求項13】
さらに、前記ウェハの検査のための前記検査システムによって使用されるための1つまたはそれ以上の光学モードとピクセル・サイズについての情報を使用して前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項14】
さらに、前記検査システムと前記ウェハのための前記検査システムによって使用されるための検査プロセスとに適合する所定のアライメント部位を選択するために、前処理した設計データによって前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項15】
さらに、前記検査システムを使用してウェハ上のダイの列をスキャンすることと、ユニークなアライメント部位を識別するためにダイのそれぞれのフレームを処理することとによって、前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項16】
さらに、適切な所定のアライメント部位を選択するために検査のための前記検査システムの最良のイメージング・モードを使用して前記ウェハをスキャンすることと、前記所定のアライメント部位に対するシミュレートされたイメージ又は前記所定のアライメント部位に対する設計のクリップに最もよく一致するイメージとなる前記検査システムの前記モードを使用して光学パッチ・イメージを取り込むために前記選択された所定のアライメント部位を再び訪れることとを含む請求項1に記載の方法。
【請求項17】
前記アライメント部位は前記複数のスワスのそれぞれにおける1つ以上のアライメント部位を含む請求項1に記載の方法。
【請求項18】
前記アライメント部位は拡大縮小誤差を補正するために前記複数のスワスのそれぞれにおける1つ以上のアライメント部位を含む請求項1に記載の方法。
【請求項19】
前記所定のアライメント部位は前記ウェハ上の1つのダイ上で所定の頻度により選択される請求項1に記載の方法。
【請求項20】
前記所定のアライメント部位は所定の最小距離間隔で前記ウェハ上のダイ上に分散されている請求項1に記載の方法。
【請求項21】
さらに、前記検査システムにおけるステージの位置精度、回転誤差、x及びy平行移動誤差、拡大縮小誤差、又はその何らかの組合せを補正するために前記検査システムを前記アライメント部位にアラインすることを含む請求項1に記載の方法。
【請求項22】
さらに、組み合わせることで前記少なくとも1つのアライメント部位の位置を決定するステップのための十分なアライメント情報をもたらすアライメント・フィーチャの集合を含むように前記所定のアライメント部位を選択することを含む請求項1に記載の方法。
【請求項23】
前記検査システムは前記ウェハの検査のために明視野モードを使用するように構成されている請求項1に記載の方法。
【請求項24】
前記検査システムは前記ウェハの検査のために暗視野モードを使用するように構成されている請求項1に記載の方法。
【請求項25】
前記検査システムは前記ウェハの検査のために電子ビーム・イメージング・モードを使用するように構成されている請求項1に記載の方法。
【請求項26】
前記設計データの前記1つ又は複数の属性は、前記異なる部分においてすでに検出されている欠陥の歩留まりクリティカル度、前記異なる部分においてすでに検出されている前記欠陥の故障確率、又はそれらの何らかの組合せに基づいて選択される請求項1に記載の方法。
【請求項27】
前記感度を決定するステップは、さらに、前記設計データ空間における前記検査データの前記位置及びコンテキスト・マップに基づいて前記ウェハの前記異なる部分で欠陥を検出する前記感度を決定することを含み、前記コンテキスト・マップは、前記設計データ空間における前記ウェハに対する前記設計データの前記1つ又は複数の属性に対する値を含む請求項1に記載の方法。
【請求項28】
前記検査データは、前記ウェハ上の欠陥に対するデータを含み、前記方法は、さらに、前記設計データ空間における前記検査データの前記位置に基づいて、前記設計データ空間における前記欠陥の位置を決定することと、前記設計データ空間における前記欠陥の前記位置と前記設計データ空間における設計データの1つ又は複数の属性とに基づいて、前記欠陥がニュイサンス欠陥であるかどうかを判定することと、前記設計データ空間における前記設計データの前記1つ又は複数の属性に基づいてニュイサンス欠陥であると判定されない前記欠陥が系統的欠陥であるか、又はランダム欠陥であるかを判定することとを含む請求項1に記載の方法。
【請求項29】
前記ウェハと追加のウェハは、ウェハ・レベルのプロセス・パラメータ変調を使用して処理され、前記方法は、前記ウェハと前記追加のウェハのダイに対する検査データを、共通の標準参照ダイと比較することにより前記ウェハと前記追加のウェハの欠陥を検出することをさらに含む請求項1に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図14a】
【図14b】
【図14c】
【図14d】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図14a】
【図14b】
【図14c】
【図14d】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2012−168195(P2012−168195A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2012−111262(P2012−111262)
【出願日】平成24年5月15日(2012.5.15)
【分割の表示】特願2008−541507(P2008−541507)の分割
【原出願日】平成18年11月20日(2006.11.20)
【出願人】(500049141)ケーエルエー−テンカー コーポレイション (126)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成24年5月15日(2012.5.15)
【分割の表示】特願2008−541507(P2008−541507)の分割
【原出願日】平成18年11月20日(2006.11.20)
【出願人】(500049141)ケーエルエー−テンカー コーポレイション (126)
【Fターム(参考)】
[ Back to top ]