
検査用ロボット
【課題】検体に対する検査前の処理を正確かつ効率的に行う。
【解決手段】作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム10a及び第2アーム10bと、前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニット12を装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニット14を装着させ、前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行う。
【解決手段】作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム10a及び第2アーム10bと、前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニット12を装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニット14を装着させ、前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、血液、血漿、血清等の検体中の成分を検査するための検査用ロボットに関するものである。
【背景技術】
【0002】
従来、血液、血漿、血清等の検体を収容する検体容器は、検体の検査等を行う検査機関に搬送され、検査機関において受付処理が行われた後に検体ラックに収容されて保管される。即ち、まず、受付処理、例えば、検査機関に搬送された検体を収容した検体容器に、検体番号、受付日等を含む検体情報を記載したラベル等の貼り付けが行われる。次に、受付処理が行われた検体は、検体ラックに収容され、例えば、ラック番号、ラックの収容部の位置番号とそのラックに保管されている検体の検体情報等を関連付ける(紐付ける)ことによって検体指示情報が作成され、この検体指示情報に基づいて検体の保管が行われると共に検体の検査等が行われる(例えば、特許文献1参照)。
【特許文献1】特開平8−285855号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
検体の検査が指示された場合には、検体指示情報に基づいて、必要な検体(親検体)が検体ラックから抜き取られ、検体の性状測定、検体の攪拌、検体チューブの開栓、小分け用空チューブの用意、親検体の分注、試薬の分注等の検査前の処理が行われ、検査前の処理が終了した検体を用いて検査が行われる。従来、このような処理は、処理ごとに専用の装置または人手により個別に行われていたため、誤りが生じやすく効率的な処理を行うことができない場合があった。
【0004】
本発明の目的は、検体に対する検査前の処理を正確かつ効率的に行うことができる検査用ロボットを提供することである。
【課題を解決するための手段】
【0005】
請求項1記載の検査用ロボットは、作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム及び第2アームと、前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニットを装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニットを装着させ、前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行うことを特徴とする。
【0006】
また、請求項2記載の検査用ロボットは、前記制御部により制御され、測定部にセットされた前記親検体チューブ内の前記検体の性状の測定を行う検体性状アナライザを更に備え、前記制御部は、前記検体情報に基づいて、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより親検体ラックに載置されている前記親検体チューブを掴ませ、前記検体性状アナライザの測定部にセットすることを特徴とする。
【0007】
また、請求項3記載の検査用ロボットは、前記検体性状アナライザの測定結果に基づいて前記検体が異常と判別された場合には、前記制御部が前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより前記親検体チューブを掴ませ、NG検体ラックに載置することを特徴とする。
【0008】
また、請求項4記載の検査用ロボットは、前記制御部により制御され、所定位置にセットされた前記親検体チューブの開栓を行う開栓機を更に備え、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記親検体チューブを前記開栓機の所定位置にセットさせることを特徴とする。
【0009】
また、請求項5記載の検査用ロボットは、前記制御部により制御され、前記親検体チューブの前記検体情報に含まれる検体番号を示すバーコードラベルを印刷し、所定位置にセットされた前記小分け用検体チューブに該ラベルの貼り付けを行うラベルプリンタを更に備え、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを前記ラベルプリンタの所定位置にセットさせることを特徴とする。
【0010】
また、請求項6記載の検査用ロボットは、前記制御部が前記検体情報に基づいて前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを所定の仕分けラックに載置させることを特徴とする。
【0011】
また、請求項7記載の検査用ロボットは、前記制御部が前記検体情報に基づいて前記分注ユニットに、各検査項目ごとに用意された仕分けラックに載置された前記小分け用検体チューブに前記検体の分注を行わせることを特徴とする。
【0012】
また、請求項8記載の検査用ロボットは、前記検体情報に含まれる検体番号に対応させて、前記小分け用検体チューブが載置された前記仕分けラック番号及び該仕分け用ラック上の位置を記憶する記憶部を備えることを特徴とする。
【0013】
また、請求項9記載の検査用ロボットは、前記制御部が前記第1アームまたは前記第2アームに前記アタッチメントとして試薬分注ユニットを装着させ、前記検体情報に基づいて前記試薬分注ユニットに前記所定の仕分けラックに載置された前記小分け用検体チューブに試薬の分注を行わせることを特徴とする。
【発明の効果】
【0014】
本発明の検査用ロボットによれば、第1アーム及び第2アームに作業工程に応じたアタッチメントを装着して各作業工程における処理を行うため、検査前の処理を正確かつ効率的に行うことができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照して、本発明の実施形態に係る検査用ロボットを用いた、検体検査の前処理の説明を行う。
【0016】
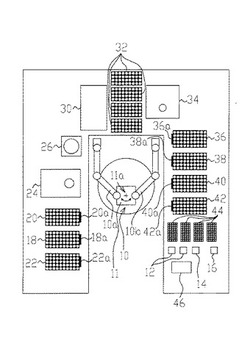
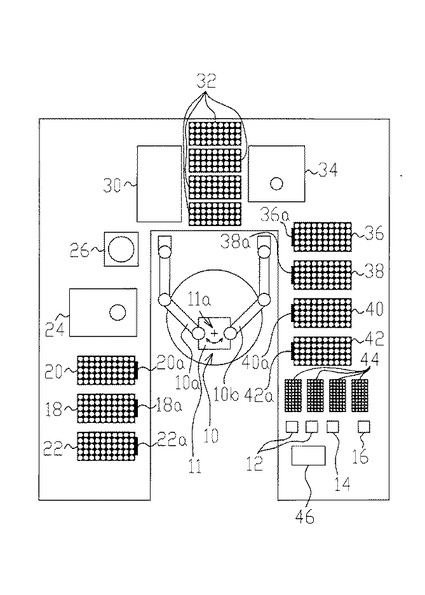
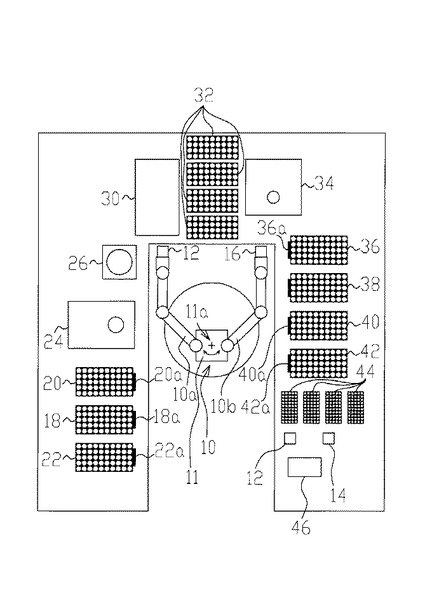
図1は、検査用ロボット及び各機器の配置状態を示す図である。検査用ロボット10は、ロボット本体部11と、6自由度の多関節構造を有する第1アーム10a及び第2アーム10bを備える双腕ロボットであり、第1アーム10a及び第2アーム10bの先端部に各作業工程に応じたアタッチメントを装着することにより、各作業工程に応じた動作を行うことが可能である。なお、ロボット本体部11は、図に示す回動中心11a回りに回動可能である。ここでアタッチメントとして、検体チューブを掴む検体チューブ掴みユニット12、検体の分注を行う検体分注ユニット14、試薬の分注を行う試薬分注ユニット16が用意されている。なお、第1アーム10a及び第2アーム10bは、同一の構造を有しており、それぞれ検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16の装着を行うことができる。
【0017】
図1において、ロボット本体部11の左側には、親検体ラック18、親検体移載用ラック20、NG検体ラック22、検体性状アナライザ24、ボルテックス26が配置されている。親検体ラック18には、血液、血漿、血清等の親検体が収容された親検体チューブが載置され、親検体移載用ラック20には、検体性状アナライザ24による測定により検体が正常と判定された親検体チューブが載置され、NG検体ラック22には、検体性状アナライザ24による測定により検体が異常と判定された親検体チューブが載置される。なお、親検体ラック18、親検体移載用ラック20及びNG検体ラック22には、検体チューブを載置する50(5×10)個の検体ホールが設けられており、また親検体ラック18、親検体移載用ラック20及びNG検体ラック22の側面には、それぞれ検体ラック番号を示すバーコード18a,20a,22aが付されている。
【0018】
また、検体性状アナライザ24は、測定部にセットされた親検体チューブ内の検体の性状、例えばフィブリンの有無、溶血であるか否か、乳ビであるか否かについて、光線の透過率などを用いて測定を行い、親検体が正常な状態か、異常な状態かの判別を行う。また、ボルテックス26は、親検体チューブ内の検体の攪拌を行う。
【0019】
また、図1において、ロボット本体部11の正面には、開栓機30、小分け用空チューブ32、ラベルプリンタ34が配置されている。開栓機30は、所定位置にセットされた親検体チューブの開栓を行う。小分け用空チューブ32は、ラックに載置されており、親検体を小分け分注する際に用いられる。ラベルプリンタ34は、検体番号を示すバーコードラベルを印刷し、所定位置にセットされた小分け用検体チューブ32に該ラベルの貼り付けを行う。
【0020】
また、図1において、ロボット本体部11の右側には、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42、ディスポーザブルチップ44、チップリムーバ46が配置されている。また、上述の検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16もここに配置されている。仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42は、各検査項目(検査機器)ごとに用意されたものである。従って、ラックごとにその形状、載置可能な検体の本数が異なる場合がある。また、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42は、後工程の検査装置にそのままセットされ、各検査装置において検体チューブ内の検体に対する検査が行われる。なお、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42の側面には、それぞれラック番号を示すバーコード36a,38a,40a,42aが付されている。
【0021】
ディスポーザブルチップ44は、検体分注ユニット14、試薬分注ユニット16により検体の分注、試薬の分注を行う際に、分注ノズルの先端に装着されるものであり、異なる検体に対する処理を行うごとに交換される。また、チップリムーバ46は、ディスポーザブルチップ44を交換する際に、分注ノズルの先端からディスポーザブルチップ44を取り外す。なお、上述の検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46は、検査用ロボット10の一部を構成する。
【0022】
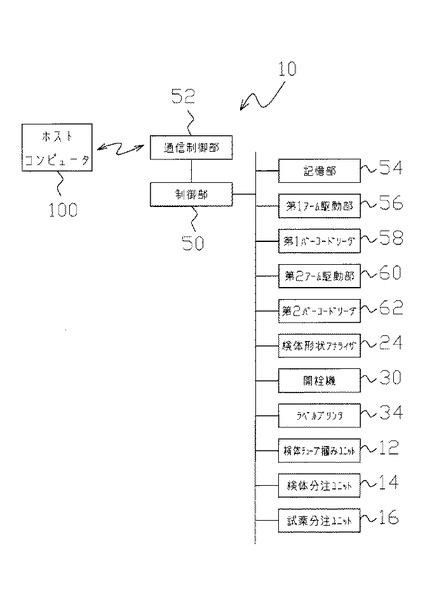
図2は、検査用ロボットのシステム構成図である。検査用ロボット10は、検査用ロボット10の各部の制御を行う制御部50を備えている。制御部50には、通信制御部52が接続されており、ホストコンピュータ100との間のデータの送受信の制御を行う。また、制御部50には、記憶部54が接続されており、ホストコンピュータ100から受信した検体情報などを記憶する。
【0023】
制御部50には、第1アーム10aを駆動する第1アーム駆動部56、第1アーム10aの先端部近傍に設けられた第1バーコードリーダ58、第2アーム10bを駆動する第2アーム駆動部60、第2アーム10bの先端部近傍に設けられた第2バーコードリーダ62が接続されている。制御部50は、第1アーム駆動部56を制御して第1アーム10aを駆動し、第2アーム駆動部60を制御して第2アーム10bを駆動する。第1バーコードリーダ58、第2バーコードリーダ62により読み取られたバーコードデータは、制御部50に入力される。
【0024】
また、制御部50には、検体性状アナライザ24、開栓機30及びラベルプリンタ34が接続され、制御部50による制御に従って動作を行う。また、制御部50には、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16も接続され、制御部50による制御に従って動作を行う。
【0025】
医療機関等で採取された検体が収容された検体チューブは、検査依頼書と共に検体検査所に送付される。検体検査所においては、検体チューブ(親検体チューブ)に検体番号を表示したバーコードラベルを貼り付け、親検体ラック18に載置する。また、検査依頼書に記載されている検体情報(基本情報、患者情報)、親検体チューブが載置された親検体ラック18の親ラック番号は、図示しない入力部から入力されホストコンピュータ100において記憶される。なお、親検体チューブの載置が完了した親検体ラック18は、保管所において保管され、検査の前処理を行う際に、図1に示す位置に配置される。
【0026】
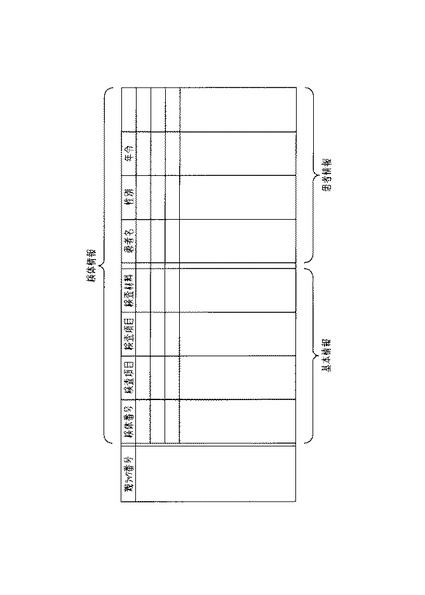
図3は、ホストコンピュータ100において記憶されている親ラック番号及び検体情報(基本情報、患者情報)を示すものである。基本情報には、検体番号、検査項目、検査材料などの情報が含まれ、患者情報には、患者名、性別、年令などの情報が含まれている。
【0027】
次に、検体の性状測定、検体の攪拌、検体チューブの開栓、小分け用空チューブの用意、親検体の分注及び試薬の分注等の検査の前処理について詳細に説明する。まず、制御部50は、第1アーム駆動部56により第1アーム10aを駆動し、第1アーム10aの先端部近傍に設けられた第1バーコードリーダ58により、親検体ラック18、親検体移載用ラック20及びNG検体ラック22のバーコード18a,20a,22aをそれぞれ読み取る。
【0028】
制御部50は、親検体ラック18のバーコード18aにより示されている親ラック番号に基づいて、この親検体ラック18に載置されている親検体の検体情報(基本情報)をホストコンピュータ100から取得する。なお、図4は、ホストコンピュータ100から取得し記憶部54により記憶されている、親検体ラック18に載置されている親検体の検体情報(基本情報)を示すものである。
【0029】
次に、図5に示すように、制御部50は、第1アーム駆動部56により第1アーム10aを駆動し、第1アーム10aの先端部に検体チューブ掴みユニット12を装着すると共に、第2アーム駆動部60により第2アーム10bを駆動し、第2アーム10bの先端部に検体チューブ掴みユニット12を装着する。そして、第1アーム10aの検体チューブ掴みユニット12により、親検体ラック18から親検体チューブを1本取得し、検体性状アナライザ24の測定部にセットする。なお、この場合に、第1バーコードリーダ58により、親検体チューブに貼り付けられているバーコードラベルのバーコードを読み取り、親検体の検査番号を取得する。
【0030】
検体性状アナライザ24の測定結果に基づいて検体が正常と判別された場合には、親検体チューブを親検体移載用ラック20に載置して、図6に示すように、検体番号に対応させて、検体の性状が正常である旨と、ラック番号として親検体移載用ラック20のラック番号、親検体チューブを載置した親検体移載用ラック20のホール番号を記憶する。一方、検体性状アナライザ24の測定結果に基づいて検体が異常と判別された場合には、親検体チューブをNG検体ラック22に載置して、図6に示すように、検体番号に対応させて、検体の性状異常(異常の内容)である旨と、ラック番号として、NG検体ラック22のラック番号、親検体チューブを載置したNG検体ラック22のホール番号を記憶する。
【0031】
制御部50は、第1アーム10aによる処理と同時に、第2アーム10bを駆動し、小分け用空チューブの用意を行う。即ち、第2アーム10bの検体チューブ掴みユニット12により、小分け用空チューブ32を1本取得し、ラベルプリンタ34の所定の場所にセットする。ラベルプリンタ34は、第1アーム10aの検体チューブ掴みユニット12により親検体移載用ラック20に載置され、これから検体の分注を行う親検体の検体番号と同じ検体番号を表示するバーコードラベルを印刷し、このバーコードラベルを小分け用空チューブ32に貼り付ける。制御部50は、検体情報の検査項目に基づき、第2アーム10bを駆動し、仕分ラックA36、仕分ラックB38、仕分ラックC40、仕分ラックD42の中で検査項目に対応した仕分ラックに載置する。そして、図6に示すように、検体番号に対応させて、その仕分ラックのラック番号と、小分け用空チューブ32を載置した仕分ラック22のホール番号を記憶する。なお、制御部50は、検体情報の検査項目が複数ある場合には、その項目数に応じて複数本(必要数−1本)の小分け用空チューブ32を用意する。
【0032】
次に、制御部50は、第1アーム駆動部56を制御して検体チューブ掴みユニット12により、親検体移載用ラック20から、検体の分注を行う親検体チューブを取得し、第1バーコードリーダ58により、親検体チューブに貼り付けられているバーコードラベルのバーコードを読み取る。ここでバーコードラベルに表示されている検体番号に対応する検体情報に、検体の攪拌の指示が含まれている場合には、第1アーム駆動部56を制御して親検体チューブをボルテックス26の所定位置にセットして、親検体チューブ内の検体の攪拌を行う。
【0033】
次に、制御部50は、第1アーム駆動部56を制御して、第1アーム10aにより親検体チューブを開栓機30の所定位置にセットして、親検体チューブの開栓を行う。
【0034】
この間に、制御部50は、第2アーム駆動部60を制御して第2アーム10bから検体チューブ掴みユニット12を取り外し、第2アーム10bの先端部に検体分注ユニット14を装着する(図7参照)。
【0035】
そして、検体分注ユニット14の分注ノズルに、ディスポーザブルチップ44をセットする。そして、制御部50は、第2アーム10bに装着されている分注ユニット14により、第1アーム10aに装着されている検体チューブ掴みユニット12により保持している親検体チューブから、検体情報に基づいて検体を所定量吸引する。その後、検体情報に従って、分注ユニット14により仕分けラックに載置されている小分け用空チューブ32に所定量の検体を吐出することにより、検体の分注をおこなう。なお、このようにして小分け用空チューブ32に検体の分注が行われた後は、子検体(子検体チューブ32)として扱う。なお、検体情報によりn本の分注が指示されている場合には、(n−1)本の小分け用空チューブに検体を順次分注する。そして、第1アーム駆動部56を制御し、第1アーム10aにより保持している親検体チューブを、検体情報に基づいて所定の仕分けラックに載置し、検体番号に対応させて、この親検体チューブを載置した仕分ラックのラック番号と、親検体チューブを載置した仕分ラックのホール番号を記憶する。その後、チップリムーバ46によりディスポーザブルチップ44を取り外し、ディスポーザブルチップ44を破棄する。
【0036】
なお、親検体ラック18に載置されている親検体チューブが複数本ある場合には、各親検体に対して上述の検査の前処理を行う。そして、親検体ラック18に載置されている全ての親検体に対する処理が終了した後に、検体番号と、仕分けラック番号および仕分けラックのホール番号とを対応させた情報をホストコンピュータ100に対して送信する。これにより、ホストコンピュータには、検体番号に対応して、仕分けラック番号、仕分けラックのホール番号が記憶される。
【0037】
なお、この検査用ロボットを用いて試薬分注を行うことができる。この場合には、図8に示すように、制御部50は、第2アーム駆動部60を制御して第2アーム10bから検体分注ユニット14を取り外し、第2アーム10bの先端部に試薬分注ユニット16を装着する。
【0038】
そして、試薬分注ユニット16の分注ノズルに、ディスポーザブルチップ44をセットする。そして、制御部50は、検体情報に基づいて、第2アーム10bに装着されている試薬分注ユニット16により、仕分けラックに載置されている子検体チューブ32に試薬の分注を行う。そして、試薬分注が終了した場合には、チップリムーバ46によりディスポーザブルチップ44を取り外し、ディスポーザブルチップ44を破棄する。
【0039】
この実施形態に係る検査用ロボットによれば、第1アーム及び第2アームに作業工程に応じたアタッチメントを装着して各作業工程における処理を行うため、検査前の処理を正確かつ効率的に行うことができる。
【0040】
なお、上述の実施形態においては、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46は、検査用ロボット10の一部を構成するものとして説明したが、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46をそれぞれ検査用ロボット10とは、別装置として構成し、検査用ロボット10の制御部50から制御信号を送信して、この制御信号に基づいて動作させるようにしてもよい。
【図面の簡単な説明】
【0041】
【図1】実施の形態に係る検査用ロボット及び各機器の配置状態を示す図である。
【図2】実施の形態に係る検査用ロボットのシステム構成図である。
【図3】実施の形態に係るホストコンピュータに記憶されている親ラック番号と検体情報を示す図である。
【図4】実施の形態に係るホストコンピュータから取得した検体情報(基本情報)を示す図である。
【図5】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【図6】実施の形態に係る小分け用空チューブに対する分注処理後の検体情報を示す図である。
【図7】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【図8】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【符号の説明】
【0042】
10…検査用ロボット、10a…第1アーム、10b…第2アーム、11…ロボット本体、12…検体チューブ掴みユニット、14…検体分注ユニット、16…試薬分注ユニット、18…親検体ラック、20…親検体移載用ラック、22…NG検体ラック、24…検体性状アナライザ、26…ボルテックス、30…開栓機、32…小分け用空チューブ、34…ラベルプリンタ、36,38,40,42…仕分けラック、50…制御部、52…通信制御部、54…記憶部、56…第1アーム駆動部、58…第1バーコードリーダ、60…第2アーム駆動部、62…第2バーコードリーダ、100…ホストコンピュータ
【技術分野】
【0001】
本発明は、血液、血漿、血清等の検体中の成分を検査するための検査用ロボットに関するものである。
【背景技術】
【0002】
従来、血液、血漿、血清等の検体を収容する検体容器は、検体の検査等を行う検査機関に搬送され、検査機関において受付処理が行われた後に検体ラックに収容されて保管される。即ち、まず、受付処理、例えば、検査機関に搬送された検体を収容した検体容器に、検体番号、受付日等を含む検体情報を記載したラベル等の貼り付けが行われる。次に、受付処理が行われた検体は、検体ラックに収容され、例えば、ラック番号、ラックの収容部の位置番号とそのラックに保管されている検体の検体情報等を関連付ける(紐付ける)ことによって検体指示情報が作成され、この検体指示情報に基づいて検体の保管が行われると共に検体の検査等が行われる(例えば、特許文献1参照)。
【特許文献1】特開平8−285855号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
検体の検査が指示された場合には、検体指示情報に基づいて、必要な検体(親検体)が検体ラックから抜き取られ、検体の性状測定、検体の攪拌、検体チューブの開栓、小分け用空チューブの用意、親検体の分注、試薬の分注等の検査前の処理が行われ、検査前の処理が終了した検体を用いて検査が行われる。従来、このような処理は、処理ごとに専用の装置または人手により個別に行われていたため、誤りが生じやすく効率的な処理を行うことができない場合があった。
【0004】
本発明の目的は、検体に対する検査前の処理を正確かつ効率的に行うことができる検査用ロボットを提供することである。
【課題を解決するための手段】
【0005】
請求項1記載の検査用ロボットは、作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム及び第2アームと、前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニットを装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニットを装着させ、前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行うことを特徴とする。
【0006】
また、請求項2記載の検査用ロボットは、前記制御部により制御され、測定部にセットされた前記親検体チューブ内の前記検体の性状の測定を行う検体性状アナライザを更に備え、前記制御部は、前記検体情報に基づいて、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより親検体ラックに載置されている前記親検体チューブを掴ませ、前記検体性状アナライザの測定部にセットすることを特徴とする。
【0007】
また、請求項3記載の検査用ロボットは、前記検体性状アナライザの測定結果に基づいて前記検体が異常と判別された場合には、前記制御部が前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより前記親検体チューブを掴ませ、NG検体ラックに載置することを特徴とする。
【0008】
また、請求項4記載の検査用ロボットは、前記制御部により制御され、所定位置にセットされた前記親検体チューブの開栓を行う開栓機を更に備え、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記親検体チューブを前記開栓機の所定位置にセットさせることを特徴とする。
【0009】
また、請求項5記載の検査用ロボットは、前記制御部により制御され、前記親検体チューブの前記検体情報に含まれる検体番号を示すバーコードラベルを印刷し、所定位置にセットされた前記小分け用検体チューブに該ラベルの貼り付けを行うラベルプリンタを更に備え、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを前記ラベルプリンタの所定位置にセットさせることを特徴とする。
【0010】
また、請求項6記載の検査用ロボットは、前記制御部が前記検体情報に基づいて前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを所定の仕分けラックに載置させることを特徴とする。
【0011】
また、請求項7記載の検査用ロボットは、前記制御部が前記検体情報に基づいて前記分注ユニットに、各検査項目ごとに用意された仕分けラックに載置された前記小分け用検体チューブに前記検体の分注を行わせることを特徴とする。
【0012】
また、請求項8記載の検査用ロボットは、前記検体情報に含まれる検体番号に対応させて、前記小分け用検体チューブが載置された前記仕分けラック番号及び該仕分け用ラック上の位置を記憶する記憶部を備えることを特徴とする。
【0013】
また、請求項9記載の検査用ロボットは、前記制御部が前記第1アームまたは前記第2アームに前記アタッチメントとして試薬分注ユニットを装着させ、前記検体情報に基づいて前記試薬分注ユニットに前記所定の仕分けラックに載置された前記小分け用検体チューブに試薬の分注を行わせることを特徴とする。
【発明の効果】
【0014】
本発明の検査用ロボットによれば、第1アーム及び第2アームに作業工程に応じたアタッチメントを装着して各作業工程における処理を行うため、検査前の処理を正確かつ効率的に行うことができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照して、本発明の実施形態に係る検査用ロボットを用いた、検体検査の前処理の説明を行う。
【0016】
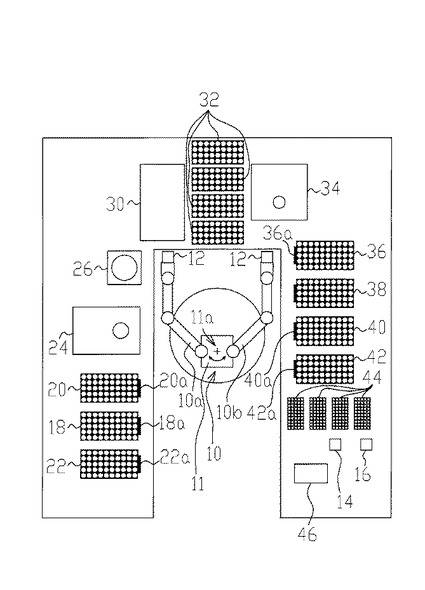
図1は、検査用ロボット及び各機器の配置状態を示す図である。検査用ロボット10は、ロボット本体部11と、6自由度の多関節構造を有する第1アーム10a及び第2アーム10bを備える双腕ロボットであり、第1アーム10a及び第2アーム10bの先端部に各作業工程に応じたアタッチメントを装着することにより、各作業工程に応じた動作を行うことが可能である。なお、ロボット本体部11は、図に示す回動中心11a回りに回動可能である。ここでアタッチメントとして、検体チューブを掴む検体チューブ掴みユニット12、検体の分注を行う検体分注ユニット14、試薬の分注を行う試薬分注ユニット16が用意されている。なお、第1アーム10a及び第2アーム10bは、同一の構造を有しており、それぞれ検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16の装着を行うことができる。
【0017】
図1において、ロボット本体部11の左側には、親検体ラック18、親検体移載用ラック20、NG検体ラック22、検体性状アナライザ24、ボルテックス26が配置されている。親検体ラック18には、血液、血漿、血清等の親検体が収容された親検体チューブが載置され、親検体移載用ラック20には、検体性状アナライザ24による測定により検体が正常と判定された親検体チューブが載置され、NG検体ラック22には、検体性状アナライザ24による測定により検体が異常と判定された親検体チューブが載置される。なお、親検体ラック18、親検体移載用ラック20及びNG検体ラック22には、検体チューブを載置する50(5×10)個の検体ホールが設けられており、また親検体ラック18、親検体移載用ラック20及びNG検体ラック22の側面には、それぞれ検体ラック番号を示すバーコード18a,20a,22aが付されている。
【0018】
また、検体性状アナライザ24は、測定部にセットされた親検体チューブ内の検体の性状、例えばフィブリンの有無、溶血であるか否か、乳ビであるか否かについて、光線の透過率などを用いて測定を行い、親検体が正常な状態か、異常な状態かの判別を行う。また、ボルテックス26は、親検体チューブ内の検体の攪拌を行う。
【0019】
また、図1において、ロボット本体部11の正面には、開栓機30、小分け用空チューブ32、ラベルプリンタ34が配置されている。開栓機30は、所定位置にセットされた親検体チューブの開栓を行う。小分け用空チューブ32は、ラックに載置されており、親検体を小分け分注する際に用いられる。ラベルプリンタ34は、検体番号を示すバーコードラベルを印刷し、所定位置にセットされた小分け用検体チューブ32に該ラベルの貼り付けを行う。
【0020】
また、図1において、ロボット本体部11の右側には、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42、ディスポーザブルチップ44、チップリムーバ46が配置されている。また、上述の検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16もここに配置されている。仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42は、各検査項目(検査機器)ごとに用意されたものである。従って、ラックごとにその形状、載置可能な検体の本数が異なる場合がある。また、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42は、後工程の検査装置にそのままセットされ、各検査装置において検体チューブ内の検体に対する検査が行われる。なお、仕分けラックA36、仕分けラックB38、仕分けラックC40、仕分けラックD42の側面には、それぞれラック番号を示すバーコード36a,38a,40a,42aが付されている。
【0021】
ディスポーザブルチップ44は、検体分注ユニット14、試薬分注ユニット16により検体の分注、試薬の分注を行う際に、分注ノズルの先端に装着されるものであり、異なる検体に対する処理を行うごとに交換される。また、チップリムーバ46は、ディスポーザブルチップ44を交換する際に、分注ノズルの先端からディスポーザブルチップ44を取り外す。なお、上述の検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46は、検査用ロボット10の一部を構成する。
【0022】
図2は、検査用ロボットのシステム構成図である。検査用ロボット10は、検査用ロボット10の各部の制御を行う制御部50を備えている。制御部50には、通信制御部52が接続されており、ホストコンピュータ100との間のデータの送受信の制御を行う。また、制御部50には、記憶部54が接続されており、ホストコンピュータ100から受信した検体情報などを記憶する。
【0023】
制御部50には、第1アーム10aを駆動する第1アーム駆動部56、第1アーム10aの先端部近傍に設けられた第1バーコードリーダ58、第2アーム10bを駆動する第2アーム駆動部60、第2アーム10bの先端部近傍に設けられた第2バーコードリーダ62が接続されている。制御部50は、第1アーム駆動部56を制御して第1アーム10aを駆動し、第2アーム駆動部60を制御して第2アーム10bを駆動する。第1バーコードリーダ58、第2バーコードリーダ62により読み取られたバーコードデータは、制御部50に入力される。
【0024】
また、制御部50には、検体性状アナライザ24、開栓機30及びラベルプリンタ34が接続され、制御部50による制御に従って動作を行う。また、制御部50には、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16も接続され、制御部50による制御に従って動作を行う。
【0025】
医療機関等で採取された検体が収容された検体チューブは、検査依頼書と共に検体検査所に送付される。検体検査所においては、検体チューブ(親検体チューブ)に検体番号を表示したバーコードラベルを貼り付け、親検体ラック18に載置する。また、検査依頼書に記載されている検体情報(基本情報、患者情報)、親検体チューブが載置された親検体ラック18の親ラック番号は、図示しない入力部から入力されホストコンピュータ100において記憶される。なお、親検体チューブの載置が完了した親検体ラック18は、保管所において保管され、検査の前処理を行う際に、図1に示す位置に配置される。
【0026】
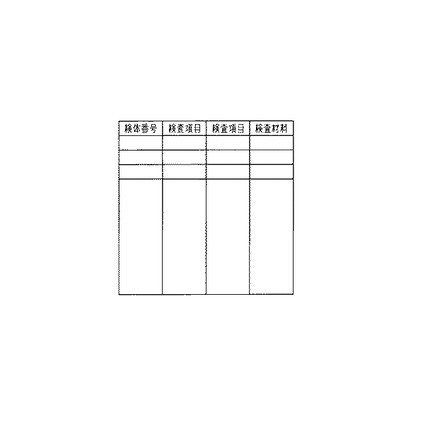
図3は、ホストコンピュータ100において記憶されている親ラック番号及び検体情報(基本情報、患者情報)を示すものである。基本情報には、検体番号、検査項目、検査材料などの情報が含まれ、患者情報には、患者名、性別、年令などの情報が含まれている。
【0027】
次に、検体の性状測定、検体の攪拌、検体チューブの開栓、小分け用空チューブの用意、親検体の分注及び試薬の分注等の検査の前処理について詳細に説明する。まず、制御部50は、第1アーム駆動部56により第1アーム10aを駆動し、第1アーム10aの先端部近傍に設けられた第1バーコードリーダ58により、親検体ラック18、親検体移載用ラック20及びNG検体ラック22のバーコード18a,20a,22aをそれぞれ読み取る。
【0028】
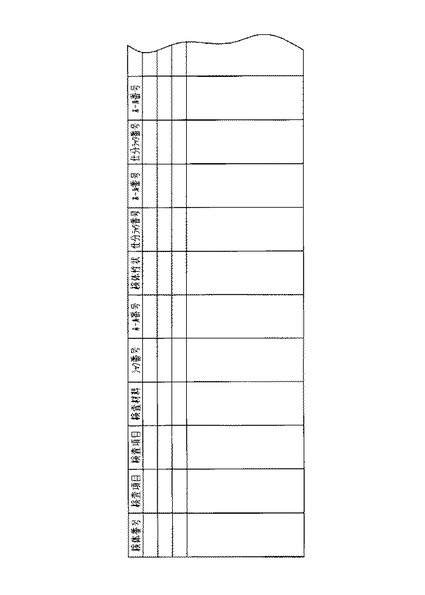
制御部50は、親検体ラック18のバーコード18aにより示されている親ラック番号に基づいて、この親検体ラック18に載置されている親検体の検体情報(基本情報)をホストコンピュータ100から取得する。なお、図4は、ホストコンピュータ100から取得し記憶部54により記憶されている、親検体ラック18に載置されている親検体の検体情報(基本情報)を示すものである。
【0029】
次に、図5に示すように、制御部50は、第1アーム駆動部56により第1アーム10aを駆動し、第1アーム10aの先端部に検体チューブ掴みユニット12を装着すると共に、第2アーム駆動部60により第2アーム10bを駆動し、第2アーム10bの先端部に検体チューブ掴みユニット12を装着する。そして、第1アーム10aの検体チューブ掴みユニット12により、親検体ラック18から親検体チューブを1本取得し、検体性状アナライザ24の測定部にセットする。なお、この場合に、第1バーコードリーダ58により、親検体チューブに貼り付けられているバーコードラベルのバーコードを読み取り、親検体の検査番号を取得する。
【0030】
検体性状アナライザ24の測定結果に基づいて検体が正常と判別された場合には、親検体チューブを親検体移載用ラック20に載置して、図6に示すように、検体番号に対応させて、検体の性状が正常である旨と、ラック番号として親検体移載用ラック20のラック番号、親検体チューブを載置した親検体移載用ラック20のホール番号を記憶する。一方、検体性状アナライザ24の測定結果に基づいて検体が異常と判別された場合には、親検体チューブをNG検体ラック22に載置して、図6に示すように、検体番号に対応させて、検体の性状異常(異常の内容)である旨と、ラック番号として、NG検体ラック22のラック番号、親検体チューブを載置したNG検体ラック22のホール番号を記憶する。
【0031】
制御部50は、第1アーム10aによる処理と同時に、第2アーム10bを駆動し、小分け用空チューブの用意を行う。即ち、第2アーム10bの検体チューブ掴みユニット12により、小分け用空チューブ32を1本取得し、ラベルプリンタ34の所定の場所にセットする。ラベルプリンタ34は、第1アーム10aの検体チューブ掴みユニット12により親検体移載用ラック20に載置され、これから検体の分注を行う親検体の検体番号と同じ検体番号を表示するバーコードラベルを印刷し、このバーコードラベルを小分け用空チューブ32に貼り付ける。制御部50は、検体情報の検査項目に基づき、第2アーム10bを駆動し、仕分ラックA36、仕分ラックB38、仕分ラックC40、仕分ラックD42の中で検査項目に対応した仕分ラックに載置する。そして、図6に示すように、検体番号に対応させて、その仕分ラックのラック番号と、小分け用空チューブ32を載置した仕分ラック22のホール番号を記憶する。なお、制御部50は、検体情報の検査項目が複数ある場合には、その項目数に応じて複数本(必要数−1本)の小分け用空チューブ32を用意する。
【0032】
次に、制御部50は、第1アーム駆動部56を制御して検体チューブ掴みユニット12により、親検体移載用ラック20から、検体の分注を行う親検体チューブを取得し、第1バーコードリーダ58により、親検体チューブに貼り付けられているバーコードラベルのバーコードを読み取る。ここでバーコードラベルに表示されている検体番号に対応する検体情報に、検体の攪拌の指示が含まれている場合には、第1アーム駆動部56を制御して親検体チューブをボルテックス26の所定位置にセットして、親検体チューブ内の検体の攪拌を行う。
【0033】
次に、制御部50は、第1アーム駆動部56を制御して、第1アーム10aにより親検体チューブを開栓機30の所定位置にセットして、親検体チューブの開栓を行う。
【0034】
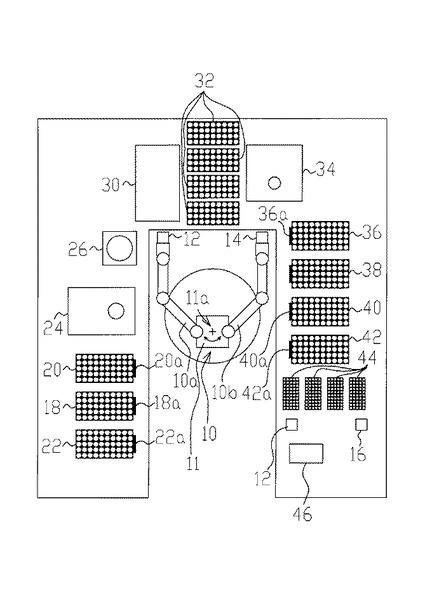
この間に、制御部50は、第2アーム駆動部60を制御して第2アーム10bから検体チューブ掴みユニット12を取り外し、第2アーム10bの先端部に検体分注ユニット14を装着する(図7参照)。
【0035】
そして、検体分注ユニット14の分注ノズルに、ディスポーザブルチップ44をセットする。そして、制御部50は、第2アーム10bに装着されている分注ユニット14により、第1アーム10aに装着されている検体チューブ掴みユニット12により保持している親検体チューブから、検体情報に基づいて検体を所定量吸引する。その後、検体情報に従って、分注ユニット14により仕分けラックに載置されている小分け用空チューブ32に所定量の検体を吐出することにより、検体の分注をおこなう。なお、このようにして小分け用空チューブ32に検体の分注が行われた後は、子検体(子検体チューブ32)として扱う。なお、検体情報によりn本の分注が指示されている場合には、(n−1)本の小分け用空チューブに検体を順次分注する。そして、第1アーム駆動部56を制御し、第1アーム10aにより保持している親検体チューブを、検体情報に基づいて所定の仕分けラックに載置し、検体番号に対応させて、この親検体チューブを載置した仕分ラックのラック番号と、親検体チューブを載置した仕分ラックのホール番号を記憶する。その後、チップリムーバ46によりディスポーザブルチップ44を取り外し、ディスポーザブルチップ44を破棄する。
【0036】
なお、親検体ラック18に載置されている親検体チューブが複数本ある場合には、各親検体に対して上述の検査の前処理を行う。そして、親検体ラック18に載置されている全ての親検体に対する処理が終了した後に、検体番号と、仕分けラック番号および仕分けラックのホール番号とを対応させた情報をホストコンピュータ100に対して送信する。これにより、ホストコンピュータには、検体番号に対応して、仕分けラック番号、仕分けラックのホール番号が記憶される。
【0037】
なお、この検査用ロボットを用いて試薬分注を行うことができる。この場合には、図8に示すように、制御部50は、第2アーム駆動部60を制御して第2アーム10bから検体分注ユニット14を取り外し、第2アーム10bの先端部に試薬分注ユニット16を装着する。
【0038】
そして、試薬分注ユニット16の分注ノズルに、ディスポーザブルチップ44をセットする。そして、制御部50は、検体情報に基づいて、第2アーム10bに装着されている試薬分注ユニット16により、仕分けラックに載置されている子検体チューブ32に試薬の分注を行う。そして、試薬分注が終了した場合には、チップリムーバ46によりディスポーザブルチップ44を取り外し、ディスポーザブルチップ44を破棄する。
【0039】
この実施形態に係る検査用ロボットによれば、第1アーム及び第2アームに作業工程に応じたアタッチメントを装着して各作業工程における処理を行うため、検査前の処理を正確かつ効率的に行うことができる。
【0040】
なお、上述の実施形態においては、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46は、検査用ロボット10の一部を構成するものとして説明したが、検体チューブ掴みユニット12、検体分注ユニット14、試薬分注ユニット16、検体性状アナライザ24、ボルテックス26、開栓機30、ラベルプリンタ34及びチップリムーバ46をそれぞれ検査用ロボット10とは、別装置として構成し、検査用ロボット10の制御部50から制御信号を送信して、この制御信号に基づいて動作させるようにしてもよい。
【図面の簡単な説明】
【0041】
【図1】実施の形態に係る検査用ロボット及び各機器の配置状態を示す図である。
【図2】実施の形態に係る検査用ロボットのシステム構成図である。
【図3】実施の形態に係るホストコンピュータに記憶されている親ラック番号と検体情報を示す図である。
【図4】実施の形態に係るホストコンピュータから取得した検体情報(基本情報)を示す図である。
【図5】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【図6】実施の形態に係る小分け用空チューブに対する分注処理後の検体情報を示す図である。
【図7】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【図8】実施の形態に係る検査用ロボットによる検査の前処理について説明するための図である。
【符号の説明】
【0042】
10…検査用ロボット、10a…第1アーム、10b…第2アーム、11…ロボット本体、12…検体チューブ掴みユニット、14…検体分注ユニット、16…試薬分注ユニット、18…親検体ラック、20…親検体移載用ラック、22…NG検体ラック、24…検体性状アナライザ、26…ボルテックス、30…開栓機、32…小分け用空チューブ、34…ラベルプリンタ、36,38,40,42…仕分けラック、50…制御部、52…通信制御部、54…記憶部、56…第1アーム駆動部、58…第1バーコードリーダ、60…第2アーム駆動部、62…第2バーコードリーダ、100…ホストコンピュータ
【特許請求の範囲】
【請求項1】
作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム及び第2アームと、
前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、
前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニットを装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニットを装着させ、
前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行うことを特徴とする検査用ロボット。
【請求項2】
前記制御部により制御され、測定部にセットされた前記親検体チューブ内の前記検体の性状の測定を行う検体性状アナライザを更に備え、
前記制御部は、前記検体情報に基づいて、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより親検体ラックに載置されている前記親検体チューブを掴ませ、前記検体性状アナライザの測定部にセットすることを特徴とする請求項1記載の検査用ロボット。
【請求項3】
前記検体性状アナライザの測定結果に基づいて前記検体が異常と判別された場合には、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより前記親検体チューブを掴ませ、NG検体ラックに載置することを特徴とする請求項2記載の検査用ロボット。
【請求項4】
前記制御部により制御され、所定位置にセットされた前記親検体チューブの開栓を行う開栓機を更に備え、
前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記親検体チューブを前記開栓機の所定位置にセットさせることを特徴とする請求項1記載の検査用ロボット。
【請求項5】
前記制御部により制御され、前記親検体チューブの前記検体情報に含まれる検体番号を示すバーコードラベルを印刷し、所定位置にセットされた前記小分け用検体チューブに該ラベルの貼り付けを行うラベルプリンタを更に備え、
前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを前記ラベルプリンタの所定位置にセットさせることを特徴とする請求項1記載の検査用ロボット。
【請求項6】
前記制御部は、前記検体情報に基づいて前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを所定の仕分けラックに載置させることを特徴とする請求項1記載の検査用ロボット。
【請求項7】
前記制御部は、前記検体情報に基づいて前記分注ユニットに、各検査項目ごとに用意された前記仕分けラックに載置された前記小分け用検体チューブに前記検体の分注を行わせることを特徴とする請求項6記載の検査用ロボット。
【請求項8】
前記検体情報に含まれる検体番号に対応させて、前記小分け用検体チューブが載置された前記仕分けラックのラック番号及び該仕分け用ラック上の位置を記憶する記憶部を備えることを特徴とする請求項6記載の検査用ロボット。
【請求項9】
前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして試薬分注ユニットを装着させ、前記検体情報に基づいて前記試薬分注ユニットに所定の前記仕分けラックに載置された前記小分け用検体チューブに試薬の分注を行わせることを特徴とする請求項6記載の検査用ロボット。
【請求項1】
作業工程に応じたアタッチメントを装着可能であり、かつ多関節構造を有する第1アーム及び第2アームと、
前記第1アーム、前記第2アーム及び前記アタッチメントの動作を検体情報に基づいて制御する制御部とを備え、
前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして検体チューブ掴みユニットを装着させると共に前記第2アームまたは前記第1アームに前記アタッチメントとして分注ユニットを装着させ、
前記分注ユニットに、前記検体チューブ掴みユニットにより掴んだ親検体チューブから所定量の検体を吸引させ、前記検体を小分け用検体チューブに吐出させることにより前記検体の分注を行うことを特徴とする検査用ロボット。
【請求項2】
前記制御部により制御され、測定部にセットされた前記親検体チューブ内の前記検体の性状の測定を行う検体性状アナライザを更に備え、
前記制御部は、前記検体情報に基づいて、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより親検体ラックに載置されている前記親検体チューブを掴ませ、前記検体性状アナライザの測定部にセットすることを特徴とする請求項1記載の検査用ロボット。
【請求項3】
前記検体性状アナライザの測定結果に基づいて前記検体が異常と判別された場合には、前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより前記親検体チューブを掴ませ、NG検体ラックに載置することを特徴とする請求項2記載の検査用ロボット。
【請求項4】
前記制御部により制御され、所定位置にセットされた前記親検体チューブの開栓を行う開栓機を更に備え、
前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記親検体チューブを前記開栓機の所定位置にセットさせることを特徴とする請求項1記載の検査用ロボット。
【請求項5】
前記制御部により制御され、前記親検体チューブの前記検体情報に含まれる検体番号を示すバーコードラベルを印刷し、所定位置にセットされた前記小分け用検体チューブに該ラベルの貼り付けを行うラベルプリンタを更に備え、
前記制御部は、前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを前記ラベルプリンタの所定位置にセットさせることを特徴とする請求項1記載の検査用ロボット。
【請求項6】
前記制御部は、前記検体情報に基づいて前記第1アームまたは前記第2アームに装着されている前記検体チューブ掴みユニットにより掴んだ前記小分け用検体チューブを所定の仕分けラックに載置させることを特徴とする請求項1記載の検査用ロボット。
【請求項7】
前記制御部は、前記検体情報に基づいて前記分注ユニットに、各検査項目ごとに用意された前記仕分けラックに載置された前記小分け用検体チューブに前記検体の分注を行わせることを特徴とする請求項6記載の検査用ロボット。
【請求項8】
前記検体情報に含まれる検体番号に対応させて、前記小分け用検体チューブが載置された前記仕分けラックのラック番号及び該仕分け用ラック上の位置を記憶する記憶部を備えることを特徴とする請求項6記載の検査用ロボット。
【請求項9】
前記制御部は、前記第1アームまたは前記第2アームに前記アタッチメントとして試薬分注ユニットを装着させ、前記検体情報に基づいて前記試薬分注ユニットに所定の前記仕分けラックに載置された前記小分け用検体チューブに試薬の分注を行わせることを特徴とする請求項6記載の検査用ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−127681(P2010−127681A)
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願番号】特願2008−300709(P2008−300709)
【出願日】平成20年11月26日(2008.11.26)
【出願人】(390037006)株式会社エスアールエル (29)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願日】平成20年11月26日(2008.11.26)
【出願人】(390037006)株式会社エスアールエル (29)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]