
検査装置および検査方法
【課題】ホワイトスポットを除去して検査精度を向上させることのできる検査装置および検査方法を提供する。
【解決手段】複数の撮像素子が直線状に配列されたラインセンサによって取得された3ライン分の画像データを蓄積し(S21)、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に対象となる画素を疑似欠陥と判定する(S22)。8つの画素について階調値の平均を算出し、得られた値を対象となる画素の階調値と置き換える(S23)。また、疑似欠陥の判定が行われたストライプと同じストライプについてラインセンサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることもできる。
【解決手段】複数の撮像素子が直線状に配列されたラインセンサによって取得された3ライン分の画像データを蓄積し(S21)、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に対象となる画素を疑似欠陥と判定する(S22)。8つの画素について階調値の平均を算出し、得られた値を対象となる画素の階調値と置き換える(S23)。また、疑似欠陥の判定が行われたストライプと同じストライプについてラインセンサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることもできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検査装置および検査方法に関する。
【背景技術】
【0002】
近年、大規模集積回路(LSI)の高集積化および大容量化に伴い、半導体素子に要求される回路線幅は益々狭くなっている。半導体素子は、回路パターンが形成された原画パターン(マスクまたはレチクルを指す。以下では、マスクと総称する。)を用い、いわゆるステッパと呼ばれる縮小投影露光装置でウェハ上にパターンを露光転写して回路形成することにより製造される。こうした微細な回路パターンをウェハに転写するためのマスクの製造には、微細パターンを描画可能な電子ビーム描画装置が用いられる。また、レーザビームを用いて描画するレーザビーム描画装置の開発も試みられている。尚、電子ビーム描画装置は、ウェハに直接パターン回路を描画する場合にも用いられる。
【0003】
多大な製造コストのかかるLSIの製造にとって、歩留まりの向上は欠かせない。しかし、1ギガビット級のDRAM(ランダムアクセスメモリ)に代表されるように、LSIを構成するパターンは、サブミクロンからナノメータのオーダーになろうとしている。歩留まりを低下させる大きな要因の1つとして、マスクのパターン欠陥が挙げられる。そして、半導体ウェハ上に形成されるLSIパターン寸法の微細化に伴って、パターン欠陥として検出しなければならない寸法も極めて小さいものとなっている。そのため、LSI製造に使用される転写用マスクの欠陥を検出する検査装置には、高い検査精度が必要とされる。
【0004】
欠陥検出をする手法の1つとして、「ダイ−トゥ−データベース(die to database)検査」がある。これは、例えば、描画データ(設計パターンデータ)を検査装置に入力し、これをベースに設計画像データ(参照画像)を生成して、パターンを撮像して得られた測定データ(光学画像)と比較する手法である。ここで、描画データは、パターン設計されたCADデータが描画装置に入力可能なフォーマットに変換されたものである。
【0005】
ダイ−トゥ−データベース検査では、光源から出射された光が光学系を介して検査対象であるマスクに照射される。マスクはテーブル上に載置されており、テーブルが移動することによって照射された光がマスク上を走査する。マスクを透過または反射した光はレンズを介して画像センサ上に結像し、画像センサで撮像された光学画像は測定データとして比較部へ送られる。比較部では、測定データと設計画像データとがアルゴリズムにしたがって比較される。そして、これらのデータが一致しない場合には欠陥ありと判定される(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−112178号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
また、欠陥検査工程においては、検査結果から作成されたデータを基にモニタに欠陥が表示され、オペレータは、これが本当に問題となる欠陥であるか否かを判定するとともに欠陥を分類する。具体的には、測定データである光学画像と参照画像から比較画像が生成され、比較画像に表示された欠陥がオペレータによってレビューされる。
【0008】
欠陥検査工程で検出される欠陥の中には、疑似欠陥が含まれる。オペレータの負担を減らし、正確な検査結果を得るためには、疑似欠陥ができるだけ少ないことが好ましい。
【0009】
疑似欠陥の1つにホワイトスポットと称されるものがある。これは、宇宙線等に起因して生じる疑似欠陥である。
【0010】
検査工程で使用される画像センサは、宇宙線に対して感度を有する。宇宙線1個あたり1千〜数千個の電子−正孔対が発生するので、画像中の宇宙線が透過した位置には点状の疑似画像が生じる。この画像は、周辺に比べて明るいことから、「ホワイトスポット」と呼ばれる。ホワイトスポットは真正欠陥と紛らわしいため、ホワイトスポットを除去することが必要になる。しかしながら、宇宙線を遮蔽物により除去するのは困難である。
【0011】
ホワイトスポットは、天文学の用途でも見られる。この場合のホワイトスポットは、天体の画像と紛らわしい。一方、ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。そこで、天文学の用途では、1つの対象について複数回の撮像を行い、得られた画像を比較することでホワイトスポットを除去している。
【0012】
しかしながら、かかる方法を検査工程で発生するホワイトスポットに適用することは難しい。1回の検査工程に要する時間は、天体を撮像する時間に比べて長く、検査工程を複数回繰り返して得られる画像を比較する作業は、生産性を著しく低下させる結果となるからである。また、欠陥検出アルゴリズムによって、疑似欠陥であるか否かの判定精度を向上させるにも限界がある。
【0013】
本発明は、こうした点に鑑みてなされたものである。すなわち、本発明の目的は、ホワイトスポットを除去して検査精度を向上させることのできる検査装置および検査方法を提供することにある。
【0014】
本発明の他の目的および利点は、以下の記載から明らかとなるであろう。
【課題を解決するための手段】
【0015】
本発明の第1の態様は、検査対象に光を照射して光学画像を得る光学画像取得手段と、
検査対象の設計データから参照画像を作成する参照画像作成手段と、
光学画像と参照画像を比較する比較手段とを備えた検査装置において、
光学画像取得手段は、複数の撮像素子が直線状に配列された画像センサを有し、
画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが閾値を超える場合に対象となる画素を疑似欠陥と判定する疑似欠陥判定処理部を有することを特徴とするものである。
【0016】
本発明の第2の態様は、検査対象に光を照射して光学画像を得る光学画像取得工程と、
検査対象の設計データから参照画像を作成する参照画像作成工程と、
光学画像と参照画像を比較する比較工程とを備えた検査方法において、
複数の撮像素子が直線状に配列された画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に対象となる画素を疑似欠陥と判定する工程を有することを特徴とするものである。
【0017】
本発明の第2の態様では、8つの画素について階調値の平均を算出し、得られた値を対象となる画素の階調値と置き換えることが好ましい。
【0018】
本発明の第2の態様では、疑似欠陥の判定が行われたストライプと同じストライプについて画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることが好ましい。
【0019】
本発明の第2の態様では、8つの画素の各階調値を比較し、これらの内の最大値と最小値の差が第2の閾値を超える場合は、対象となる画素を疑似欠陥と判定しないことが好ましい。
【発明の効果】
【0020】
本発明によれば、ホワイトスポットを除去して検査精度を向上させることのできる検査装置および検査方法が提供される。
【図面の簡単な説明】
【0021】
【図1】本実施の形態において、データが蓄積される3つのラインと、対象となる中央ラインの画素と、この周囲に隣接する8つの画素とを示す図である。
【図2】図1の具体例である。
【図3】図1の他の具体例である。
【図4】本実施の形態における検査装置の構成図である。
【図5】本実施の形態におけるデータの流れを示す概念図である。
【図6】本実施の形態の検査工程を示すフローチャートである。
【図7】光学画像の取得手順を説明する図である。
【図8】フィルタ処理を説明する図である。
【図9】本実施の形態の検査工程の他の例を示すフローチャートである。
【図10】光学画像における画素毎の階調値を示した一例である。
【図11】ホワイトスポットが発生している領域の階調値を示した一例である。
【発明を実施するための形態】
【0022】
検査工程では、光源から出射された光が光学系を介して検査対象に照射される。検査対象はテーブル上に載置されており、テーブルが移動することによって照射された光が検査対象上を走査する。検査対象を透過または反射した光は、レンズを介して画像センサ上に結像し、画像センサで光学画像が撮像される。この光学画像は、比較部へ送られ、比較部において、光学画像と手本となる参照画像とが比較される。そして、これらが一致しない場合には欠陥ありと判定される。
【0023】
光学画像には、画素毎に0階調から225階調までのいずれかの値が与えられ、これによって描画パターンや欠陥が表示される。具体的には、光学画像と参照画像を生成した後、これらの階調値の差を求めて比較画像を生成する。2つの画像の間に違いがあれば比較画像に表示されるので、比較画像を見ることで欠陥を特定することができる。
【0024】
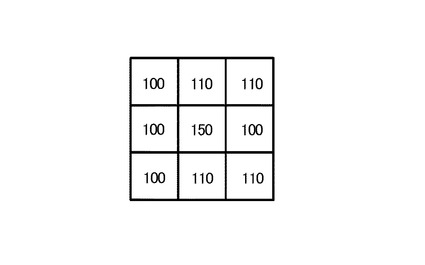
図10は、画像センサで撮像された光学画像について、画素(ピクセル)毎の階調値を示した一例である。この図で示されている領域に描画パターンがないとすると、欠陥がなければ、どの画素も同じ階調値をとるはずである。しかしながら、図10では、中央の画素の階調値が140であるのに対し、周辺に行くにしたがって、階調値は120、110、100と変化する。このことは、この領域に欠陥があることを示している。
【0025】
真正欠陥(実欠陥)の場合、図10に示すように、階調値は複数の画素に渡って緩やかに変化する。これに対して、疑似欠陥であるホワイトスポットは、光学画像の1画素(1ピクセル)に発生することが多い。
【0026】
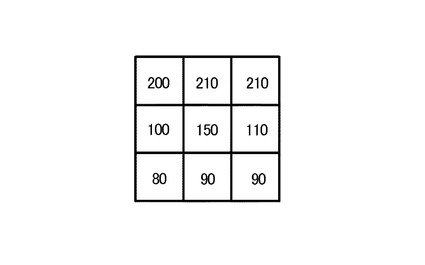
図11は、ホワイトスポットが発生している領域の階調値を示した一例である。この図では、中央の画素の階調値のみが200であり、他の画素の階調値は100である。このように、ホワイトスポットが発生すると、1画素のみが他の画素と比べて突出した階調値となる。したがって、図10のように複数の画素に渡って発生する真正欠陥と区別することができる。そこで、本実施の形態では、1画素に発生する欠陥をホワイトスポットとみなし、これを除去することで光学画像から疑似欠陥を除く。
【0027】
具体的には、複数の撮像素子が直線状に配列された、画像センサとしてのラインセンサで撮像した光学画像について、3ライン分のデータを蓄積する。これらのデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。得られた8つの差の全てが予め定められた閾値を超える場合、対象となる画素をホワイトスポットによる疑似欠陥と判定する。
【0028】
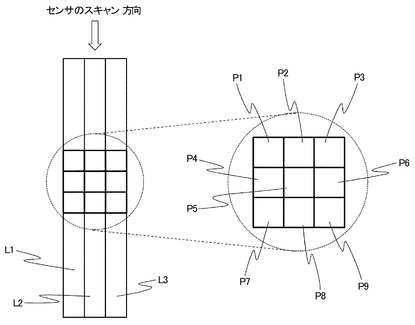
図1は、データが蓄積される3つのライン(L1、L2、L3)と、対象となる中央ラインの画素(P5)と、この周囲に隣接する8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)とを示したものである。
【0029】
図1において、各画素の階調値をそれぞれ次のように定義する。

【0030】
上記a〜iの間に下記の全ての関係が成立するとき、画素P5はホワイトスポットであると判定する。但し、Xは閾値であり、ユーザが適宜設定できる。
【0031】
図2は、図1の具体例であり、a〜iの各値は次の通りである。
【0032】
閾値X=30とすれば、画素P5の階調値eとの差は、いずれも閾値より大きい。したがって、この場合は、画素P5はホワイトスポットによる疑似欠陥と判定する。
【0033】
画素P5が疑似欠陥と判定されると、画素P5の値について補完処理を行う。具体的には、周囲の8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)について階調値の平均を算出し、得られた値を画素P5の階調値と置き換える。例えば、図2において、8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の平均値は、
であるので、画素P5の階調値50を平均値105に置き換える。これにより、画素P5のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれる。
【0034】
本実施の形態においては、上記の補完処理に代えて、疑似欠陥の判定が行われたストライプと同じストライプについて画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換える処理を行うこともできる。
【0035】
画素P5がホワイトスポットであると判定された場合、同じ場所、すなわち、同じストライプをラインセンサで再度スキャンする。ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、同じストライプを再度スキャンすることにより、画素P5の階調値は、周囲の画素の階調値との差が閾値X以下の値になると考えられる。そこで、再度のスキャンで得られた画像データを前回得られた画像データと置き換えて、新たな階調値を適用することにより、画素P5のセンサデータは欠陥とはみなされなくなる。
【0036】
このように、1画素に発生する欠陥をホワイトスポットとみなし、これを除去することで、複数回の検査処理を行うことなしに光学画像から疑似欠陥を除くことができる。
【0037】
但し、下記の(1)または(2)に該当する場合は、画素P5と、周囲の8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)との差がいずれも閾値Xを超えたとしても、画素P5をホワイトスポットとは判定しないことにする。
【0038】
(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合
この場合は、対象とする画素(P5)がパターンエッジ上にある可能性が高い。ここで、パターエッジとは、パターンのあるところとパターンのないところの境界である。真正欠陥は、一般に、パターンエッジに発生しやすい。そこで、かかる真正欠陥が見逃されないようにするため、画素P5をホワイトスポットとはみなさない。
【0039】
図3に具体例を示す。この場合、a〜iの各値は次の通りである。
【0040】
閾値X=30とすれば、画素P5の階調値eとの差は、いずれも閾値より大きい。一方、8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較すると、最大値は210、最小値は80であり、差は130である。閾値Y=110とすれば、最大値と最小値の差は閾値より大きい。そこで、かかる場合には、画素P5をホワイトスポットとはみなさないことにする。
【0041】
(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合
検査対象を透過した光をラインセンサ(第1のラインセンサ)上に結像し、取得された3ライン分の画像データを蓄積する。また、検査対象から反射した光を別のラインセンサ(第2のラインセンサ)上に結像し、取得された3ライン分の画像データを蓄積する。第1のラインセンサによって取得された3ライン分の内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する画素との階調値の差を求める。同様に、第2のラインセンサによって取得された3ライン分の内の中央ラインの各画素についても、対象となる画素と、この周囲に隣接する画素との階調値の差を求める。同一の対象画素について、得られた差の全てが閾値Xを超える場合は、かかる対象となる画素を疑似欠陥とは判定しない。尚、2つのラインセンサを用いずに、1つのラインセンサで、第1のラインセンサと第2のラインセンサの役割を果たすようにしてもよい。
【0042】
ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、図1の例でいえば、透過像と反射像の同じ位置にある画素P5について、ホワイトスポットと思われる階調値が得られた場合には、この画素P5をホワイトスポットとは判定しない。
【0043】
上記(1)と(2)の除外判定を設けることで、真正欠陥を疑似欠陥と誤認するおそれを低減することができる。
【0044】
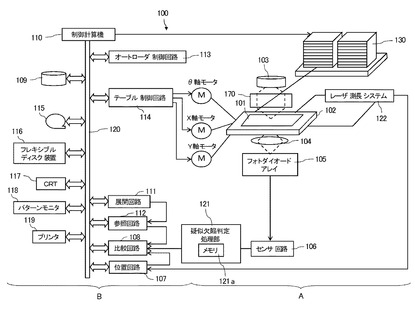
図4は、本実施の形態における検査装置100の構成図である。本実施の形態においては、フォトリソグラフィ法などで使用されるマスクを検査対象としているが、ウェハを検査対象としてもよい。
【0045】
図4に示すように、検査装置100は、光学画像取得部Aと制御部Bを有する。
【0046】
光学画像取得部Aは、光源103と、水平方向(X方向、Y方向)および回転方向(θ方向)に移動可能なXYθテーブル102と、透過照明系を構成する照明光学系170と、拡大光学系104と、フォトダイオードアレイ105と、センサ回路106と、疑似欠陥判定処理部121と、レーザ測長システム122と、オートローダ130とを有する。
【0047】
制御部Bでは、検査装置100全体の制御を司る制御計算機110が、データ伝送路となるバス120を介して、位置回路107、比較回路108、参照回路112、展開回路111、オートローダ制御回路113、テーブル制御回路114、記憶装置の一例となる磁気ディスク装置109、磁気テープ装置115、フレキシブルディスク装置116、CRT117、パターンモニタ118およびプリンタ119に接続されている。XYθテーブル102は、テーブル制御回路114によって制御されたX軸モータ、Y軸モータおよびθ軸モータによって駆動される。これらのモータには、例えば、ステップモータを用いることができる。
【0048】
データベース方式の基準データとなる設計パターンデータは、磁気ディスク装置109に格納されており、検査の進行に合わせて読み出されて展開回路111に送られる。展開回路111では、設計パターンデータがイメージデータ(設計画素データ)に変換される。その後、このイメージデータは、参照回路112に送られて参照データの生成に用いられる。
【0049】
尚、図4では、本実施の形態で必要な構成要素を記載しているが、マスクを検査するのに必要な他の公知要素が含まれていてもよい。
【0050】
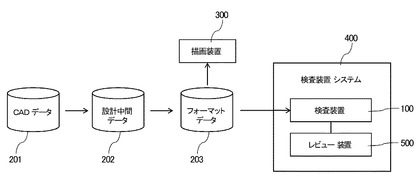
図5は、本実施の形態におけるデータの流れを示す概念図である。
【0051】
図5に示すように、設計者(ユーザ)が作成したCADデータ201は、階層化されたフォーマットの設計中間データ202に変換される。設計中間データ202には、レイヤ(層)毎に作成されて各マスクに形成されるパターンデータが格納される。ここで、一般に、描画装置300は、設計中間データ202を直接読み込めるようには構成されていない。すなわち、描画装置300の製造メーカ毎に、異なるフォーマットデータが用いられている。このため、設計中間データ202は、レイヤ毎に各描画装置に固有のフォーマットデータ203に変換された後に描画装置300に入力される。同様に、検査装置100も設計中間データ202を直接読み込めるようには構成されておらず、描画装置300と互換性のあるフォーマットデータ203に変換された上でデータ入力される。尚、検査装置100に固有のフォーマットデータに変換された上でデータ入力される場合もある。
【0052】
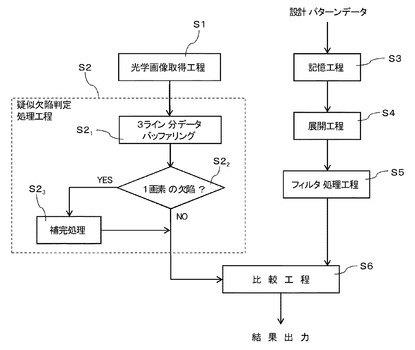
図6は、検査工程を示すフローチャートである。
【0053】
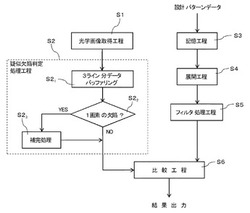
図6に示すように、検査工程は、光学画像取得工程(S1)と、疑似欠陥判定処理工程(S2)と、設計パターンデータの記憶工程(S3)と、設計画像データ生成工程の一例となる展開工程(S4)およびフィルタ処理工程(S5)と、比較工程(S6)とを有する。
【0054】
<光学画像取得工程>
S1の光学画像取得工程では、図4の光学画像取得部Aが、フォトマスク101の光学画像(測定データ)を取得する。ここで、光学画像は、設計パターンに含まれる図形データに基づく図形が描画されたマスクの画像である。光学画像の具体的な取得方法は、例えば、次に示す通りである。
【0055】
検査試料となるフォトマスク101は、XYθ各軸のモータによって水平方向および回転方向に移動可能に設けられたXYθテーブル102上に載置される。そして、フォトマスク101に形成されたパターンに対し、XYθテーブル102の上方に配置された光源103から光が照射される。より詳しくは、光源103から照射される光束が、照明光学系170を介してフォトマスク101に照射される。フォトマスク101の下方には、拡大光学系104、フォトダイオードアレイ105およびセンサ回路106が配置されている。フォトマスク101を透過した光は、拡大光学系104を介して、フォトダイオードアレイ105に光学像として結像する。ここで、拡大光学系104は、図示しない自動焦点機構によって自動的に焦点調整がなされるよう構成されていてもよい。
【0056】
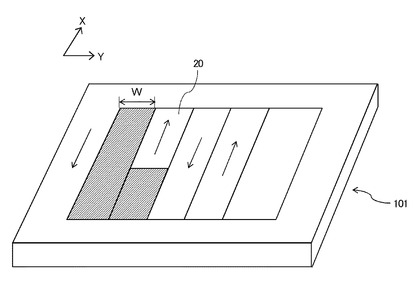
図7は、光学画像の取得手順を説明する図である。
【0057】
検査領域は、図7に示すように、Y方向に向かって、スキャン幅Wの短冊状の複数の検査ストライプ20に仮想的に分割され、さらにその分割された各検査ストライプ20が連続的に走査されるように、図4のXYθテーブル102の動作が制御され、X方向に移動しながら光学画像が取得される。フォトダイオードアレイ105では、図7に示されるようなスキャン幅Wの画像が連続的に入力される。第1の検査ストライプ20における画像を取得した後、第2の検査ストライプ20における画像を今度は逆方向に移動しながら同様にスキャン幅Wの画像が連続的に入力される。第3の検査ストライプ20における画像を取得する場合には、第2の検査ストライプ20における画像を取得する方向とは逆方向、すなわち、第1の検査ストライプ20における画像を取得した方向に、XYθテーブル102が移動する。このように、連続的に画像を取得していくことで、無駄な処理時間が短縮される。
【0058】
図4のフォトダイオードアレイ105上に結像したパターンの像は、フォトダイオードアレイ105によって光電変換され、さらにセンサ回路106によってA/D(アナログデジタル)変換される。フォトダイオードアレイ105には、センサが配置されている。本実施の形態では、CCDカメラを一列に並べたラインセンサが用いられる。ラインセンサの例としては、TDI(タイムディレイインテグレータ)センサが挙げられる。XYθテーブル102がX軸方向に連続的に移動しながら、TDIセンサによってフォトマスク101のパターンが撮像される。ここで、光源103、拡大光学系104、フォトダイオードアレイ105およびセンサ回路106により高倍率の検査光学系が構成される。
【0059】
XYθテーブル102は、制御計算機110の制御の下、テーブル制御回路114によって駆動され、X方向、Y方向、θ方向に駆動する3軸(X−Y−θ)モータの様な駆動系によって移動可能となっている。これらの、X軸モータ、Y軸モータ、θ軸モータには、例えばステップモータを用いることができる。そして、XYθテーブル102の移動位置は、レーザ測長システム122により測定されて位置回路107に送られる。また、XYθテーブル102上のフォトマスク101は、オートローダ制御回路113により駆動されるオートローダ130から自動的に搬送され、検査終了後には自動的に排出される様になっている。
【0060】
<疑似欠陥判定処理工程>
図4において、センサ回路106から出力された測定データ(光学画像)は、疑似欠陥判定処理部121へ送られる。疑似欠陥判定処理部121は、図6の疑似欠陥判定処理工程(S2)を行う。
【0061】
本実施の形態においては、ラインセンサで撮像した光学画像について、メモリ121aで3ライン分のデータが蓄積される(S21)。
【0062】
メモリ121aに蓄積されたデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。本実施の形態においては、蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。
【0063】
次に、S22において、1画素に発生する欠陥があるか否かを判定する。具体的には、3ラインの内の中央ラインに位置する対象画素の階調値と、この周囲に隣接する8つの画素の階調値との差を求めて、得られた8つの差の全てが予め定められた閾値を超えるか否かを調べる。8つの差の全てが閾値を超える場合には、対象となる画素を1画素に発生する欠陥、すなわち、ホワイトスポットによる疑似欠陥と判定する。但し、(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合、または、(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合には、対象画素をホワイトスポットとは判定しない。
【0064】
S22において、1画素に発生する欠陥があると判定された場合には、S23に進んで補完処理を行う。具体的には、周囲の8つの画素について階調値の平均を算出し、得られた値を対象画素の階調値と置き換える。これにより、対象画素のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれたデータが比較回路108へ送られる。このデータは、例えば8ビットの符号なしデータであり、各画素の明るさの階調が表現されたものである。尚、比較回路108へは、位置回路107から出力されたXYθテーブル102上でのフォトマスク101の位置を示すデータも送られる。
【0065】
一方、S22において、1画素に発生する欠陥がないと判定された場合には、S1で得られた光学画像が比較回路108へ送られる。
【0066】
<記憶工程>
図6のS3は記憶工程であり、フォトマスク101のパターン形成時に用いた設計パターンデータが、記憶装置(記憶部)の一例である磁気ディスク装置109に記憶される。
【0067】
設計パターンに含まれる図形は、長方形や三角形を基本図形としたものである。磁気ディスク装置109には、例えば、図形の基準位置における座標、辺の長さ、長方形や三角形等の図形種を区別する識別子となる図形コードといった情報であって、各パターン図形の形、大きさ、位置等を定義した図形データが格納される。
【0068】
さらに、数十μm程度の範囲に存在する図形の集合を一般にクラスタまたはセルと称するが、これを用いてデータを階層化することが行われている。クラスタまたはセルには、各種図形を単独で配置したり、ある間隔で繰り返し配置したりする場合の配置座標や繰り返し記述も定義される。クラスタまたはセルデータは、さらにフレームまたはストライプと称される、幅が数百μmであって、長さがフォトマスクのX方向またはY方向の全長に対応する100mm程度の短冊状領域に配置される。
【0069】
<展開工程>
図6のS4は展開工程である。この工程においては、図4の展開回路111が、磁気ディスク装置109から制御計算機110を通して設計パターンデータを読み出し、読み出されたフォトマスク101の設計パターンデータを2値ないしは多値のイメージデータ(設計画像データ)に変換する。そして、このイメージデータは参照回路112に送られる。
【0070】
図形データとなる設計パターンデータが展開回路111に入力されると、展開回路111は、設計パターンデータを図形毎のデータにまで展開し、その図形データの図形形状を示す図形コード、図形寸法などを解釈する。そして、所定の量子化寸法のグリッドを単位とするマス目内に配置されるパターンとして2値ないしは多値の設計画像データを展開する。展開された設計画像データは、センサ画素に相当する領域(マス目)毎に設計パターンにおける図形が占める占有率を演算する。そして、各画素内の図形占有率が画素値となる。
【0071】
<フィルタ処理工程>
図6のS5はフィルタ処理工程である。この工程では、参照回路112によって、送られてきた図形のイメージデータである設計画像データに適切なフィルタ処理が施される。
【0072】
図8は、フィルタ処理を説明する図である。
【0073】
センサ回路106から得られた光学画像としての測定データは、拡大光学系104の解像特性やフォトダイオードアレイ105のアパーチャ効果等によってフィルタが作用した状態、言い換えれば連続的に変化するアナログ状態にある。したがって、画像強度(濃淡値)がデジタル値の設計側のイメージデータである設計画像データにもフィルタ処理を施すことにより、測定データに合わせることができる。このようにして光学画像と比較する参照画像を作成する。
【0074】
<比較工程>
上述したように、疑似欠陥判定処理部121からの光学画像データは比較回路108へ送られる。このデータには、センサ回路106からの光学画像データと、かかる光学画像データから疑似欠陥が除かれたデータの双方が含まれる。また、設計パターンデータも、展開回路111および参照回路112により設計画像データに変換されて比較回路108に送られる。
【0075】
比較回路108では,疑似欠陥判定処理部121から送られた光学画像と、参照回路112で生成した参照画像とが、適切な比較判定アルゴリズムを用いて比較され、誤差が所定の値を超えた場合にその箇所は欠陥と判定される。欠陥と判定された場合には、その座標と、欠陥判定の根拠となった光学画像および参照画像とを検査結果として保存する。
【0076】
本実施の形態によれば、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去する。これにより、疑似欠陥を低減できるので、比較回路108における判定精度を向上させることができる。
【0077】
本発明の検査装置システム400は、検査装置100と、検査結果を閲覧するためのレビュー装置500とを有する(図5)。レビュー装置500を用いて、オペレータは、上記の検査結果を基にレビューを行う。レビューは、オペレータによって、検出された欠陥が問題となるものであるかどうかを判断する動作である。本実施の形態では、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去することで疑似欠陥を低減するので、レビュー工程におけるオペレータの負担を軽減できる。
【0078】
図9は、検査工程の他の例を示すフローチャートである。この例において、疑似欠陥判定処理工程(S12)以外の他の工程(S11、S13〜S16)は、図6で説明した工程(S1、S3〜S6)と同じであるので説明を省略する。
【0079】
図4において、センサ回路106から出力された測定データ(光学画像)は、疑似欠陥判定処理部121へ送られる。疑似欠陥判定処理部121は、図9の疑似欠陥判定処理工程(S12)を行う。
【0080】
本実施の形態においては、ラインセンサで撮像した光学画像について、メモリ121aで3ライン分のデータが蓄積される(S121)。
【0081】
メモリ121aに蓄積されたデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。本実施の形態においては、蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。
【0082】
次に、S122において、1画素に発生する欠陥があるか否かを判定する。具体的には、3ラインの内の中央ラインに位置する対象画素の階調値と、この周囲に隣接する8つの画素の階調値との差を求めて、得られた8つの差の全てが予め定められた閾値を超えるか否かを調べる。8つの差の全てが閾値を超える場合には、対象となる画素を1画素に発生する欠陥、すなわち、ホワイトスポットによる疑似欠陥と判定する。但し、(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合、または、(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合には、対象画素をホワイトスポットとは判定しない。
【0083】
S122において、1画素に発生する欠陥があると判定された場合には、S123に進んで光学画像取得工程を行う。この工程は、S11と同じであり、S122で疑似欠陥の判定が行われたストライプと同じストライプをラインセンサで再度スキャンする。ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、再度スキャンすることにより、対象画素の階調値は、周囲の画素の階調値との差が閾値以下の値になると考えられる。そこで、再度のスキャンで得られた画像データを前回得られた画像データと置き換えて、新たな階調値を適用することにより、画素P5のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれたデータが比較回路108へ送られる。このデータは、例えば8ビットの符号なしデータであり、各画素の明るさの階調が表現されたものである。尚、比較回路108へは、位置回路107から出力されたXYθテーブル102上でのフォトマスク101の位置を示すデータも送られる。
【0084】
一方、S122において、1画素に発生する欠陥がないと判定された場合には、S11で得られた光学画像が比較回路108へ送られる。
【0085】
以上述べたように、本発明によれば、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去する。これにより、複数回の検査処理を行うことなしに、光学画像から疑似欠陥を除くことができる。したがって、レビュー工程におけるオペレータの負担を軽減し、検査精度を向上させることができる。
【0086】
本発明は上記各実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々変形して実施することができる。
【0087】
例えば、上記実施の形態では、ダイ−トゥ−データベース方式を例に説明したが、欠陥検査の方法はダイ−トゥ−ダイ方式であってもよい。
【0088】
また、上記実施の形態では、装置構成や制御手法等、本発明の説明に直接必要としない部分についての記載を省略したが、必要とされる装置構成や制御手法を適宜選択して用いることができることは言うまでもない。その他、本発明の要素を具備し、当業者が適宜設計変更し得る全てのパターン検査装置またはパターン検査方法は、本発明の範囲に包含される。
【符号の説明】
【0089】
1 直線
2 パターンエッジ
20 検査ストライプ
100 検査装置
101 フォトマスク
102 XYθテーブル
103 光源
104 拡大光学系
105 フォトダイオードアレイ
106 センサ回路
107 位置回路
108 比較回路
109 磁気ディスク装置
110 制御計算機
111 展開回路
112 参照回路
113 オートローダ制御回路
114 テーブル制御回路
115 磁気テープ装置
116 フレキシブルディスク装置
117 CRT
118 パターンモニタ
119 プリンタ
120 バス
121 疑似欠陥判定処理部
121a メモリ
122 レーザ測長システム
130 オートローダ
170 照明光学系
201 CADデータ
202 設計中間データ
203 フォーマットデータ
300 描画装置
400 検査装置システム
500 レビュー装置
【技術分野】
【0001】
本発明は、検査装置および検査方法に関する。
【背景技術】
【0002】
近年、大規模集積回路(LSI)の高集積化および大容量化に伴い、半導体素子に要求される回路線幅は益々狭くなっている。半導体素子は、回路パターンが形成された原画パターン(マスクまたはレチクルを指す。以下では、マスクと総称する。)を用い、いわゆるステッパと呼ばれる縮小投影露光装置でウェハ上にパターンを露光転写して回路形成することにより製造される。こうした微細な回路パターンをウェハに転写するためのマスクの製造には、微細パターンを描画可能な電子ビーム描画装置が用いられる。また、レーザビームを用いて描画するレーザビーム描画装置の開発も試みられている。尚、電子ビーム描画装置は、ウェハに直接パターン回路を描画する場合にも用いられる。
【0003】
多大な製造コストのかかるLSIの製造にとって、歩留まりの向上は欠かせない。しかし、1ギガビット級のDRAM(ランダムアクセスメモリ)に代表されるように、LSIを構成するパターンは、サブミクロンからナノメータのオーダーになろうとしている。歩留まりを低下させる大きな要因の1つとして、マスクのパターン欠陥が挙げられる。そして、半導体ウェハ上に形成されるLSIパターン寸法の微細化に伴って、パターン欠陥として検出しなければならない寸法も極めて小さいものとなっている。そのため、LSI製造に使用される転写用マスクの欠陥を検出する検査装置には、高い検査精度が必要とされる。
【0004】
欠陥検出をする手法の1つとして、「ダイ−トゥ−データベース(die to database)検査」がある。これは、例えば、描画データ(設計パターンデータ)を検査装置に入力し、これをベースに設計画像データ(参照画像)を生成して、パターンを撮像して得られた測定データ(光学画像)と比較する手法である。ここで、描画データは、パターン設計されたCADデータが描画装置に入力可能なフォーマットに変換されたものである。
【0005】
ダイ−トゥ−データベース検査では、光源から出射された光が光学系を介して検査対象であるマスクに照射される。マスクはテーブル上に載置されており、テーブルが移動することによって照射された光がマスク上を走査する。マスクを透過または反射した光はレンズを介して画像センサ上に結像し、画像センサで撮像された光学画像は測定データとして比較部へ送られる。比較部では、測定データと設計画像データとがアルゴリズムにしたがって比較される。そして、これらのデータが一致しない場合には欠陥ありと判定される(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−112178号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
また、欠陥検査工程においては、検査結果から作成されたデータを基にモニタに欠陥が表示され、オペレータは、これが本当に問題となる欠陥であるか否かを判定するとともに欠陥を分類する。具体的には、測定データである光学画像と参照画像から比較画像が生成され、比較画像に表示された欠陥がオペレータによってレビューされる。
【0008】
欠陥検査工程で検出される欠陥の中には、疑似欠陥が含まれる。オペレータの負担を減らし、正確な検査結果を得るためには、疑似欠陥ができるだけ少ないことが好ましい。
【0009】
疑似欠陥の1つにホワイトスポットと称されるものがある。これは、宇宙線等に起因して生じる疑似欠陥である。
【0010】
検査工程で使用される画像センサは、宇宙線に対して感度を有する。宇宙線1個あたり1千〜数千個の電子−正孔対が発生するので、画像中の宇宙線が透過した位置には点状の疑似画像が生じる。この画像は、周辺に比べて明るいことから、「ホワイトスポット」と呼ばれる。ホワイトスポットは真正欠陥と紛らわしいため、ホワイトスポットを除去することが必要になる。しかしながら、宇宙線を遮蔽物により除去するのは困難である。
【0011】
ホワイトスポットは、天文学の用途でも見られる。この場合のホワイトスポットは、天体の画像と紛らわしい。一方、ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。そこで、天文学の用途では、1つの対象について複数回の撮像を行い、得られた画像を比較することでホワイトスポットを除去している。
【0012】
しかしながら、かかる方法を検査工程で発生するホワイトスポットに適用することは難しい。1回の検査工程に要する時間は、天体を撮像する時間に比べて長く、検査工程を複数回繰り返して得られる画像を比較する作業は、生産性を著しく低下させる結果となるからである。また、欠陥検出アルゴリズムによって、疑似欠陥であるか否かの判定精度を向上させるにも限界がある。
【0013】
本発明は、こうした点に鑑みてなされたものである。すなわち、本発明の目的は、ホワイトスポットを除去して検査精度を向上させることのできる検査装置および検査方法を提供することにある。
【0014】
本発明の他の目的および利点は、以下の記載から明らかとなるであろう。
【課題を解決するための手段】
【0015】
本発明の第1の態様は、検査対象に光を照射して光学画像を得る光学画像取得手段と、
検査対象の設計データから参照画像を作成する参照画像作成手段と、
光学画像と参照画像を比較する比較手段とを備えた検査装置において、
光学画像取得手段は、複数の撮像素子が直線状に配列された画像センサを有し、
画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが閾値を超える場合に対象となる画素を疑似欠陥と判定する疑似欠陥判定処理部を有することを特徴とするものである。
【0016】
本発明の第2の態様は、検査対象に光を照射して光学画像を得る光学画像取得工程と、
検査対象の設計データから参照画像を作成する参照画像作成工程と、
光学画像と参照画像を比較する比較工程とを備えた検査方法において、
複数の撮像素子が直線状に配列された画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に対象となる画素を疑似欠陥と判定する工程を有することを特徴とするものである。
【0017】
本発明の第2の態様では、8つの画素について階調値の平均を算出し、得られた値を対象となる画素の階調値と置き換えることが好ましい。
【0018】
本発明の第2の態様では、疑似欠陥の判定が行われたストライプと同じストライプについて画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることが好ましい。
【0019】
本発明の第2の態様では、8つの画素の各階調値を比較し、これらの内の最大値と最小値の差が第2の閾値を超える場合は、対象となる画素を疑似欠陥と判定しないことが好ましい。
【発明の効果】
【0020】
本発明によれば、ホワイトスポットを除去して検査精度を向上させることのできる検査装置および検査方法が提供される。
【図面の簡単な説明】
【0021】
【図1】本実施の形態において、データが蓄積される3つのラインと、対象となる中央ラインの画素と、この周囲に隣接する8つの画素とを示す図である。
【図2】図1の具体例である。
【図3】図1の他の具体例である。
【図4】本実施の形態における検査装置の構成図である。
【図5】本実施の形態におけるデータの流れを示す概念図である。
【図6】本実施の形態の検査工程を示すフローチャートである。
【図7】光学画像の取得手順を説明する図である。
【図8】フィルタ処理を説明する図である。
【図9】本実施の形態の検査工程の他の例を示すフローチャートである。
【図10】光学画像における画素毎の階調値を示した一例である。
【図11】ホワイトスポットが発生している領域の階調値を示した一例である。
【発明を実施するための形態】
【0022】
検査工程では、光源から出射された光が光学系を介して検査対象に照射される。検査対象はテーブル上に載置されており、テーブルが移動することによって照射された光が検査対象上を走査する。検査対象を透過または反射した光は、レンズを介して画像センサ上に結像し、画像センサで光学画像が撮像される。この光学画像は、比較部へ送られ、比較部において、光学画像と手本となる参照画像とが比較される。そして、これらが一致しない場合には欠陥ありと判定される。
【0023】
光学画像には、画素毎に0階調から225階調までのいずれかの値が与えられ、これによって描画パターンや欠陥が表示される。具体的には、光学画像と参照画像を生成した後、これらの階調値の差を求めて比較画像を生成する。2つの画像の間に違いがあれば比較画像に表示されるので、比較画像を見ることで欠陥を特定することができる。
【0024】
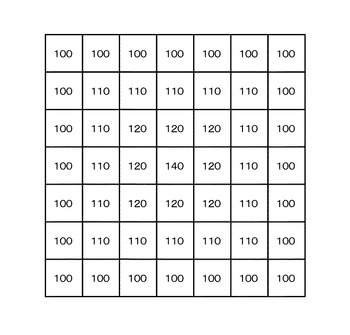
図10は、画像センサで撮像された光学画像について、画素(ピクセル)毎の階調値を示した一例である。この図で示されている領域に描画パターンがないとすると、欠陥がなければ、どの画素も同じ階調値をとるはずである。しかしながら、図10では、中央の画素の階調値が140であるのに対し、周辺に行くにしたがって、階調値は120、110、100と変化する。このことは、この領域に欠陥があることを示している。
【0025】
真正欠陥(実欠陥)の場合、図10に示すように、階調値は複数の画素に渡って緩やかに変化する。これに対して、疑似欠陥であるホワイトスポットは、光学画像の1画素(1ピクセル)に発生することが多い。
【0026】
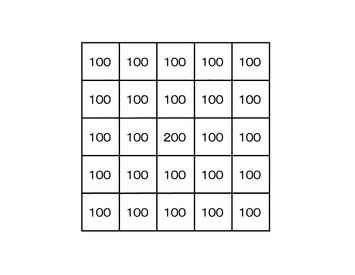
図11は、ホワイトスポットが発生している領域の階調値を示した一例である。この図では、中央の画素の階調値のみが200であり、他の画素の階調値は100である。このように、ホワイトスポットが発生すると、1画素のみが他の画素と比べて突出した階調値となる。したがって、図10のように複数の画素に渡って発生する真正欠陥と区別することができる。そこで、本実施の形態では、1画素に発生する欠陥をホワイトスポットとみなし、これを除去することで光学画像から疑似欠陥を除く。
【0027】
具体的には、複数の撮像素子が直線状に配列された、画像センサとしてのラインセンサで撮像した光学画像について、3ライン分のデータを蓄積する。これらのデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。得られた8つの差の全てが予め定められた閾値を超える場合、対象となる画素をホワイトスポットによる疑似欠陥と判定する。
【0028】
図1は、データが蓄積される3つのライン(L1、L2、L3)と、対象となる中央ラインの画素(P5)と、この周囲に隣接する8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)とを示したものである。
【0029】
図1において、各画素の階調値をそれぞれ次のように定義する。
【0030】
上記a〜iの間に下記の全ての関係が成立するとき、画素P5はホワイトスポットであると判定する。但し、Xは閾値であり、ユーザが適宜設定できる。
【0031】
図2は、図1の具体例であり、a〜iの各値は次の通りである。
【0032】
閾値X=30とすれば、画素P5の階調値eとの差は、いずれも閾値より大きい。したがって、この場合は、画素P5はホワイトスポットによる疑似欠陥と判定する。
【0033】
画素P5が疑似欠陥と判定されると、画素P5の値について補完処理を行う。具体的には、周囲の8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)について階調値の平均を算出し、得られた値を画素P5の階調値と置き換える。例えば、図2において、8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の平均値は、
であるので、画素P5の階調値50を平均値105に置き換える。これにより、画素P5のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれる。
【0034】
本実施の形態においては、上記の補完処理に代えて、疑似欠陥の判定が行われたストライプと同じストライプについて画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換える処理を行うこともできる。
【0035】
画素P5がホワイトスポットであると判定された場合、同じ場所、すなわち、同じストライプをラインセンサで再度スキャンする。ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、同じストライプを再度スキャンすることにより、画素P5の階調値は、周囲の画素の階調値との差が閾値X以下の値になると考えられる。そこで、再度のスキャンで得られた画像データを前回得られた画像データと置き換えて、新たな階調値を適用することにより、画素P5のセンサデータは欠陥とはみなされなくなる。
【0036】
このように、1画素に発生する欠陥をホワイトスポットとみなし、これを除去することで、複数回の検査処理を行うことなしに光学画像から疑似欠陥を除くことができる。
【0037】
但し、下記の(1)または(2)に該当する場合は、画素P5と、周囲の8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)との差がいずれも閾値Xを超えたとしても、画素P5をホワイトスポットとは判定しないことにする。
【0038】
(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合
この場合は、対象とする画素(P5)がパターンエッジ上にある可能性が高い。ここで、パターエッジとは、パターンのあるところとパターンのないところの境界である。真正欠陥は、一般に、パターンエッジに発生しやすい。そこで、かかる真正欠陥が見逃されないようにするため、画素P5をホワイトスポットとはみなさない。
【0039】
図3に具体例を示す。この場合、a〜iの各値は次の通りである。
【0040】
閾値X=30とすれば、画素P5の階調値eとの差は、いずれも閾値より大きい。一方、8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較すると、最大値は210、最小値は80であり、差は130である。閾値Y=110とすれば、最大値と最小値の差は閾値より大きい。そこで、かかる場合には、画素P5をホワイトスポットとはみなさないことにする。
【0041】
(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合
検査対象を透過した光をラインセンサ(第1のラインセンサ)上に結像し、取得された3ライン分の画像データを蓄積する。また、検査対象から反射した光を別のラインセンサ(第2のラインセンサ)上に結像し、取得された3ライン分の画像データを蓄積する。第1のラインセンサによって取得された3ライン分の内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する画素との階調値の差を求める。同様に、第2のラインセンサによって取得された3ライン分の内の中央ラインの各画素についても、対象となる画素と、この周囲に隣接する画素との階調値の差を求める。同一の対象画素について、得られた差の全てが閾値Xを超える場合は、かかる対象となる画素を疑似欠陥とは判定しない。尚、2つのラインセンサを用いずに、1つのラインセンサで、第1のラインセンサと第2のラインセンサの役割を果たすようにしてもよい。
【0042】
ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、図1の例でいえば、透過像と反射像の同じ位置にある画素P5について、ホワイトスポットと思われる階調値が得られた場合には、この画素P5をホワイトスポットとは判定しない。
【0043】
上記(1)と(2)の除外判定を設けることで、真正欠陥を疑似欠陥と誤認するおそれを低減することができる。
【0044】
図4は、本実施の形態における検査装置100の構成図である。本実施の形態においては、フォトリソグラフィ法などで使用されるマスクを検査対象としているが、ウェハを検査対象としてもよい。
【0045】
図4に示すように、検査装置100は、光学画像取得部Aと制御部Bを有する。
【0046】
光学画像取得部Aは、光源103と、水平方向(X方向、Y方向)および回転方向(θ方向)に移動可能なXYθテーブル102と、透過照明系を構成する照明光学系170と、拡大光学系104と、フォトダイオードアレイ105と、センサ回路106と、疑似欠陥判定処理部121と、レーザ測長システム122と、オートローダ130とを有する。
【0047】
制御部Bでは、検査装置100全体の制御を司る制御計算機110が、データ伝送路となるバス120を介して、位置回路107、比較回路108、参照回路112、展開回路111、オートローダ制御回路113、テーブル制御回路114、記憶装置の一例となる磁気ディスク装置109、磁気テープ装置115、フレキシブルディスク装置116、CRT117、パターンモニタ118およびプリンタ119に接続されている。XYθテーブル102は、テーブル制御回路114によって制御されたX軸モータ、Y軸モータおよびθ軸モータによって駆動される。これらのモータには、例えば、ステップモータを用いることができる。
【0048】
データベース方式の基準データとなる設計パターンデータは、磁気ディスク装置109に格納されており、検査の進行に合わせて読み出されて展開回路111に送られる。展開回路111では、設計パターンデータがイメージデータ(設計画素データ)に変換される。その後、このイメージデータは、参照回路112に送られて参照データの生成に用いられる。
【0049】
尚、図4では、本実施の形態で必要な構成要素を記載しているが、マスクを検査するのに必要な他の公知要素が含まれていてもよい。
【0050】
図5は、本実施の形態におけるデータの流れを示す概念図である。
【0051】
図5に示すように、設計者(ユーザ)が作成したCADデータ201は、階層化されたフォーマットの設計中間データ202に変換される。設計中間データ202には、レイヤ(層)毎に作成されて各マスクに形成されるパターンデータが格納される。ここで、一般に、描画装置300は、設計中間データ202を直接読み込めるようには構成されていない。すなわち、描画装置300の製造メーカ毎に、異なるフォーマットデータが用いられている。このため、設計中間データ202は、レイヤ毎に各描画装置に固有のフォーマットデータ203に変換された後に描画装置300に入力される。同様に、検査装置100も設計中間データ202を直接読み込めるようには構成されておらず、描画装置300と互換性のあるフォーマットデータ203に変換された上でデータ入力される。尚、検査装置100に固有のフォーマットデータに変換された上でデータ入力される場合もある。
【0052】
図6は、検査工程を示すフローチャートである。
【0053】
図6に示すように、検査工程は、光学画像取得工程(S1)と、疑似欠陥判定処理工程(S2)と、設計パターンデータの記憶工程(S3)と、設計画像データ生成工程の一例となる展開工程(S4)およびフィルタ処理工程(S5)と、比較工程(S6)とを有する。
【0054】
<光学画像取得工程>
S1の光学画像取得工程では、図4の光学画像取得部Aが、フォトマスク101の光学画像(測定データ)を取得する。ここで、光学画像は、設計パターンに含まれる図形データに基づく図形が描画されたマスクの画像である。光学画像の具体的な取得方法は、例えば、次に示す通りである。
【0055】
検査試料となるフォトマスク101は、XYθ各軸のモータによって水平方向および回転方向に移動可能に設けられたXYθテーブル102上に載置される。そして、フォトマスク101に形成されたパターンに対し、XYθテーブル102の上方に配置された光源103から光が照射される。より詳しくは、光源103から照射される光束が、照明光学系170を介してフォトマスク101に照射される。フォトマスク101の下方には、拡大光学系104、フォトダイオードアレイ105およびセンサ回路106が配置されている。フォトマスク101を透過した光は、拡大光学系104を介して、フォトダイオードアレイ105に光学像として結像する。ここで、拡大光学系104は、図示しない自動焦点機構によって自動的に焦点調整がなされるよう構成されていてもよい。
【0056】
図7は、光学画像の取得手順を説明する図である。
【0057】
検査領域は、図7に示すように、Y方向に向かって、スキャン幅Wの短冊状の複数の検査ストライプ20に仮想的に分割され、さらにその分割された各検査ストライプ20が連続的に走査されるように、図4のXYθテーブル102の動作が制御され、X方向に移動しながら光学画像が取得される。フォトダイオードアレイ105では、図7に示されるようなスキャン幅Wの画像が連続的に入力される。第1の検査ストライプ20における画像を取得した後、第2の検査ストライプ20における画像を今度は逆方向に移動しながら同様にスキャン幅Wの画像が連続的に入力される。第3の検査ストライプ20における画像を取得する場合には、第2の検査ストライプ20における画像を取得する方向とは逆方向、すなわち、第1の検査ストライプ20における画像を取得した方向に、XYθテーブル102が移動する。このように、連続的に画像を取得していくことで、無駄な処理時間が短縮される。
【0058】
図4のフォトダイオードアレイ105上に結像したパターンの像は、フォトダイオードアレイ105によって光電変換され、さらにセンサ回路106によってA/D(アナログデジタル)変換される。フォトダイオードアレイ105には、センサが配置されている。本実施の形態では、CCDカメラを一列に並べたラインセンサが用いられる。ラインセンサの例としては、TDI(タイムディレイインテグレータ)センサが挙げられる。XYθテーブル102がX軸方向に連続的に移動しながら、TDIセンサによってフォトマスク101のパターンが撮像される。ここで、光源103、拡大光学系104、フォトダイオードアレイ105およびセンサ回路106により高倍率の検査光学系が構成される。
【0059】
XYθテーブル102は、制御計算機110の制御の下、テーブル制御回路114によって駆動され、X方向、Y方向、θ方向に駆動する3軸(X−Y−θ)モータの様な駆動系によって移動可能となっている。これらの、X軸モータ、Y軸モータ、θ軸モータには、例えばステップモータを用いることができる。そして、XYθテーブル102の移動位置は、レーザ測長システム122により測定されて位置回路107に送られる。また、XYθテーブル102上のフォトマスク101は、オートローダ制御回路113により駆動されるオートローダ130から自動的に搬送され、検査終了後には自動的に排出される様になっている。
【0060】
<疑似欠陥判定処理工程>
図4において、センサ回路106から出力された測定データ(光学画像)は、疑似欠陥判定処理部121へ送られる。疑似欠陥判定処理部121は、図6の疑似欠陥判定処理工程(S2)を行う。
【0061】
本実施の形態においては、ラインセンサで撮像した光学画像について、メモリ121aで3ライン分のデータが蓄積される(S21)。
【0062】
メモリ121aに蓄積されたデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。本実施の形態においては、蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。
【0063】
次に、S22において、1画素に発生する欠陥があるか否かを判定する。具体的には、3ラインの内の中央ラインに位置する対象画素の階調値と、この周囲に隣接する8つの画素の階調値との差を求めて、得られた8つの差の全てが予め定められた閾値を超えるか否かを調べる。8つの差の全てが閾値を超える場合には、対象となる画素を1画素に発生する欠陥、すなわち、ホワイトスポットによる疑似欠陥と判定する。但し、(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合、または、(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合には、対象画素をホワイトスポットとは判定しない。
【0064】
S22において、1画素に発生する欠陥があると判定された場合には、S23に進んで補完処理を行う。具体的には、周囲の8つの画素について階調値の平均を算出し、得られた値を対象画素の階調値と置き換える。これにより、対象画素のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれたデータが比較回路108へ送られる。このデータは、例えば8ビットの符号なしデータであり、各画素の明るさの階調が表現されたものである。尚、比較回路108へは、位置回路107から出力されたXYθテーブル102上でのフォトマスク101の位置を示すデータも送られる。
【0065】
一方、S22において、1画素に発生する欠陥がないと判定された場合には、S1で得られた光学画像が比較回路108へ送られる。
【0066】
<記憶工程>
図6のS3は記憶工程であり、フォトマスク101のパターン形成時に用いた設計パターンデータが、記憶装置(記憶部)の一例である磁気ディスク装置109に記憶される。
【0067】
設計パターンに含まれる図形は、長方形や三角形を基本図形としたものである。磁気ディスク装置109には、例えば、図形の基準位置における座標、辺の長さ、長方形や三角形等の図形種を区別する識別子となる図形コードといった情報であって、各パターン図形の形、大きさ、位置等を定義した図形データが格納される。
【0068】
さらに、数十μm程度の範囲に存在する図形の集合を一般にクラスタまたはセルと称するが、これを用いてデータを階層化することが行われている。クラスタまたはセルには、各種図形を単独で配置したり、ある間隔で繰り返し配置したりする場合の配置座標や繰り返し記述も定義される。クラスタまたはセルデータは、さらにフレームまたはストライプと称される、幅が数百μmであって、長さがフォトマスクのX方向またはY方向の全長に対応する100mm程度の短冊状領域に配置される。
【0069】
<展開工程>
図6のS4は展開工程である。この工程においては、図4の展開回路111が、磁気ディスク装置109から制御計算機110を通して設計パターンデータを読み出し、読み出されたフォトマスク101の設計パターンデータを2値ないしは多値のイメージデータ(設計画像データ)に変換する。そして、このイメージデータは参照回路112に送られる。
【0070】
図形データとなる設計パターンデータが展開回路111に入力されると、展開回路111は、設計パターンデータを図形毎のデータにまで展開し、その図形データの図形形状を示す図形コード、図形寸法などを解釈する。そして、所定の量子化寸法のグリッドを単位とするマス目内に配置されるパターンとして2値ないしは多値の設計画像データを展開する。展開された設計画像データは、センサ画素に相当する領域(マス目)毎に設計パターンにおける図形が占める占有率を演算する。そして、各画素内の図形占有率が画素値となる。
【0071】
<フィルタ処理工程>
図6のS5はフィルタ処理工程である。この工程では、参照回路112によって、送られてきた図形のイメージデータである設計画像データに適切なフィルタ処理が施される。
【0072】
図8は、フィルタ処理を説明する図である。
【0073】
センサ回路106から得られた光学画像としての測定データは、拡大光学系104の解像特性やフォトダイオードアレイ105のアパーチャ効果等によってフィルタが作用した状態、言い換えれば連続的に変化するアナログ状態にある。したがって、画像強度(濃淡値)がデジタル値の設計側のイメージデータである設計画像データにもフィルタ処理を施すことにより、測定データに合わせることができる。このようにして光学画像と比較する参照画像を作成する。
【0074】
<比較工程>
上述したように、疑似欠陥判定処理部121からの光学画像データは比較回路108へ送られる。このデータには、センサ回路106からの光学画像データと、かかる光学画像データから疑似欠陥が除かれたデータの双方が含まれる。また、設計パターンデータも、展開回路111および参照回路112により設計画像データに変換されて比較回路108に送られる。
【0075】
比較回路108では,疑似欠陥判定処理部121から送られた光学画像と、参照回路112で生成した参照画像とが、適切な比較判定アルゴリズムを用いて比較され、誤差が所定の値を超えた場合にその箇所は欠陥と判定される。欠陥と判定された場合には、その座標と、欠陥判定の根拠となった光学画像および参照画像とを検査結果として保存する。
【0076】
本実施の形態によれば、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去する。これにより、疑似欠陥を低減できるので、比較回路108における判定精度を向上させることができる。
【0077】
本発明の検査装置システム400は、検査装置100と、検査結果を閲覧するためのレビュー装置500とを有する(図5)。レビュー装置500を用いて、オペレータは、上記の検査結果を基にレビューを行う。レビューは、オペレータによって、検出された欠陥が問題となるものであるかどうかを判断する動作である。本実施の形態では、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去することで疑似欠陥を低減するので、レビュー工程におけるオペレータの負担を軽減できる。
【0078】
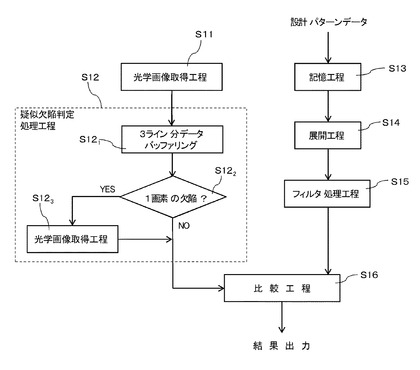
図9は、検査工程の他の例を示すフローチャートである。この例において、疑似欠陥判定処理工程(S12)以外の他の工程(S11、S13〜S16)は、図6で説明した工程(S1、S3〜S6)と同じであるので説明を省略する。
【0079】
図4において、センサ回路106から出力された測定データ(光学画像)は、疑似欠陥判定処理部121へ送られる。疑似欠陥判定処理部121は、図9の疑似欠陥判定処理工程(S12)を行う。
【0080】
本実施の形態においては、ラインセンサで撮像した光学画像について、メモリ121aで3ライン分のデータが蓄積される(S121)。
【0081】
メモリ121aに蓄積されたデータは、画素毎の階調値で表現される。各画素には、0階調から255階調のいずれかの値が与えられる。本実施の形態においては、蓄積されたデータの内、中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求める。
【0082】
次に、S122において、1画素に発生する欠陥があるか否かを判定する。具体的には、3ラインの内の中央ラインに位置する対象画素の階調値と、この周囲に隣接する8つの画素の階調値との差を求めて、得られた8つの差の全てが予め定められた閾値を超えるか否かを調べる。8つの差の全てが閾値を超える場合には、対象となる画素を1画素に発生する欠陥、すなわち、ホワイトスポットによる疑似欠陥と判定する。但し、(1)8つの画素(P1、P2、P3、P4、P6、P7、P8、P9)の各階調値を比較し、これらの内の最大値と最小値の差が所定の閾値(Y)を超える場合、または、(2)検査対象を透過した光をラインセンサ上に結像して得られた光学画像と、検査対象から反射した光を別のラインセンサ上に結像して得られた光学画像とを比較し、同じ位置にある画素P5について双方でホワイトスポットと判定された場合には、対象画素をホワイトスポットとは判定しない。
【0083】
S122において、1画素に発生する欠陥があると判定された場合には、S123に進んで光学画像取得工程を行う。この工程は、S11と同じであり、S122で疑似欠陥の判定が行われたストライプと同じストライプをラインセンサで再度スキャンする。ホワイトスポットは、時間的および空間的にランダムに発生しており、同一の場所にホワイトスポットが複数回発生する確率は極めて低い。したがって、再度スキャンすることにより、対象画素の階調値は、周囲の画素の階調値との差が閾値以下の値になると考えられる。そこで、再度のスキャンで得られた画像データを前回得られた画像データと置き換えて、新たな階調値を適用することにより、画素P5のセンサデータは欠陥とはみなされなくなる。すなわち、光学画像から疑似欠陥が除かれたデータが比較回路108へ送られる。このデータは、例えば8ビットの符号なしデータであり、各画素の明るさの階調が表現されたものである。尚、比較回路108へは、位置回路107から出力されたXYθテーブル102上でのフォトマスク101の位置を示すデータも送られる。
【0084】
一方、S122において、1画素に発生する欠陥がないと判定された場合には、S11で得られた光学画像が比較回路108へ送られる。
【0085】
以上述べたように、本発明によれば、1画素に発生する欠陥をホワイトスポットとみなし、これを光学画像データから除去する。これにより、複数回の検査処理を行うことなしに、光学画像から疑似欠陥を除くことができる。したがって、レビュー工程におけるオペレータの負担を軽減し、検査精度を向上させることができる。
【0086】
本発明は上記各実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々変形して実施することができる。
【0087】
例えば、上記実施の形態では、ダイ−トゥ−データベース方式を例に説明したが、欠陥検査の方法はダイ−トゥ−ダイ方式であってもよい。
【0088】
また、上記実施の形態では、装置構成や制御手法等、本発明の説明に直接必要としない部分についての記載を省略したが、必要とされる装置構成や制御手法を適宜選択して用いることができることは言うまでもない。その他、本発明の要素を具備し、当業者が適宜設計変更し得る全てのパターン検査装置またはパターン検査方法は、本発明の範囲に包含される。
【符号の説明】
【0089】
1 直線
2 パターンエッジ
20 検査ストライプ
100 検査装置
101 フォトマスク
102 XYθテーブル
103 光源
104 拡大光学系
105 フォトダイオードアレイ
106 センサ回路
107 位置回路
108 比較回路
109 磁気ディスク装置
110 制御計算機
111 展開回路
112 参照回路
113 オートローダ制御回路
114 テーブル制御回路
115 磁気テープ装置
116 フレキシブルディスク装置
117 CRT
118 パターンモニタ
119 プリンタ
120 バス
121 疑似欠陥判定処理部
121a メモリ
122 レーザ測長システム
130 オートローダ
170 照明光学系
201 CADデータ
202 設計中間データ
203 フォーマットデータ
300 描画装置
400 検査装置システム
500 レビュー装置
【特許請求の範囲】
【請求項1】
検査対象に光を照射して光学画像を得る光学画像取得手段と、
前記検査対象の設計データから参照画像を作成する参照画像作成手段と、
前記光学画像と前記参照画像を比較する比較手段とを備えた検査装置において、
前記光学画像取得手段は、複数の撮像素子が直線状に配列された画像センサを有し、
前記画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが閾値を超える場合に前記対象となる画素を疑似欠陥と判定する疑似欠陥判定処理部を有することを特徴とする検査装置。
【請求項2】
検査対象に光を照射して光学画像を得る光学画像取得工程と、
前記検査対象の設計データから参照画像を作成する参照画像作成工程と、
前記光学画像と前記参照画像を比較する比較工程とを備えた検査方法において、
複数の撮像素子が直線状に配列された画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に前記対象となる画素を疑似欠陥と判定する工程を有することを特徴とする検査方法。
【請求項3】
前記8つの画素について階調値の平均を算出し、得られた値を前記対象となる画素の階調値と置き換えることを特徴とする請求項2に記載の検査方法。
【請求項4】
前記疑似欠陥の判定が行われたストライプと同じストライプについて前記画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることを特徴とする請求項2に記載の検査方法。
【請求項5】
前記8つの画素の各階調値を比較し、これらの内の最大値と最小値の差が第2の閾値を超える場合は、前記対象となる画素を疑似欠陥と判定しないことを特徴とする請求項2〜4のいずれか1項に記載の検査方法。
【請求項1】
検査対象に光を照射して光学画像を得る光学画像取得手段と、
前記検査対象の設計データから参照画像を作成する参照画像作成手段と、
前記光学画像と前記参照画像を比較する比較手段とを備えた検査装置において、
前記光学画像取得手段は、複数の撮像素子が直線状に配列された画像センサを有し、
前記画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが閾値を超える場合に前記対象となる画素を疑似欠陥と判定する疑似欠陥判定処理部を有することを特徴とする検査装置。
【請求項2】
検査対象に光を照射して光学画像を得る光学画像取得工程と、
前記検査対象の設計データから参照画像を作成する参照画像作成工程と、
前記光学画像と前記参照画像を比較する比較工程とを備えた検査方法において、
複数の撮像素子が直線状に配列された画像センサによって取得された3ライン分の画像データを蓄積し、この内の中央ラインの各画素について、対象となる画素と、この周囲に隣接する8つの画素との階調値の差を求め、得られた8つの差の全てが第1の閾値を超える場合に前記対象となる画素を疑似欠陥と判定する工程を有することを特徴とする検査方法。
【請求項3】
前記8つの画素について階調値の平均を算出し、得られた値を前記対象となる画素の階調値と置き換えることを特徴とする請求項2に記載の検査方法。
【請求項4】
前記疑似欠陥の判定が行われたストライプと同じストライプについて前記画像センサで光学画像を再度取得し、得られた画像データを前回得られた画像データと置き換えることを特徴とする請求項2に記載の検査方法。
【請求項5】
前記8つの画素の各階調値を比較し、これらの内の最大値と最小値の差が第2の閾値を超える場合は、前記対象となる画素を疑似欠陥と判定しないことを特徴とする請求項2〜4のいずれか1項に記載の検査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−251785(P2012−251785A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−122498(P2011−122498)
【出願日】平成23年5月31日(2011.5.31)
【出願人】(504162958)株式会社ニューフレアテクノロジー (669)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年5月31日(2011.5.31)
【出願人】(504162958)株式会社ニューフレアテクノロジー (669)
【Fターム(参考)】
[ Back to top ]