
検査装置及び検査方法
【課題】本発明の目的は、微細化されたデバイスの特性評価のために、プローブ相互間及び試料とプローブとの位置関係を把握して、信頼性の高い検査装置及び検査方法を提供することにある。
【解決手段】本発明は、電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置を提供する。前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする。
【解決手段】本発明は、電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置を提供する。前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検査装置及び検査方法に関し、特に微小電子デバイスの特性評価を行う検査装置及び検査方法に関する。
【背景技術】
【0002】
半導体デバイスの製造分野では、新デバイスのプロセスの立ち上げ期間の短縮や、高歩留まり化のために、故障解析技術の高精度や高スループット化が不可欠である。しかし、デバイスの高性能や高機能化に伴い、デバイス設計や、微細化された製造プロセスは複雑となってきた。
【0003】
このような微細化されたデバイスの故障セルまでの特定は、従来までの故障診断や故障箇所の絞り込みで可能であった。しかしセルは、複数のトランジスタや配線で成り立っており、詳細な解析を行うためには、不良トランジスタ、或いはゲート,ソース,ドレイン,コンタクト,ビアなど、さらなる異常箇所の絞り込みが重要となってきた。
【0004】
そこで、詳細な異常個所を特定する技術として、極めて微細な探針を、直接回路上に接触させ、トランジスタの電気特性を評価する手法(ナノプロ−ビング)が提案された。この方法によれば、詳細な不良箇所が特定できるだけでなく、電気特性の異常から原因の推定も可能である。従って、最終的な試料の破壊分析となる物理解析において最良の手段を選択することができる。本手法より、故障解析が迅速化するとともに、故障解析自体の信頼性は向上する。
【0005】
このようなナノプロ−ビングシステムとして、原子間力顕微鏡(以下、AFM(Atomic Force Microscope)と略記)を用いて、微小な探針をトランジスタのコンタクトプラグに接触させる方法と、特許文献1のような走査型電子顕微鏡(以下SEM(Scanning Electron Microscope)と略記)を用いて探針を接触させる方法が提案されている。
【0006】
SEM利用のナノプロ−ビングシステムでは、試料表面に電子線を照射し、得られる2次電子を検出器に取り込み映像化する。このSEM像によって、探針とコンタクトプラグを観察しながら、探針を接触させる。しかし、試料表面の上面映像のみを観察しているため、試料表面と探針の距離など、側面からの様子が把握できなかった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−189239号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
微細化されたデバイス、特に65nm世代以降のDRAM測定では、コンタクトプラグの微小化や密集化が生じる。このためコンタクトプラグや探針同士の近接化が生じる。このため、複数のコンタクトプラグへ探針を接触させる際、探針が測定対象外のコンタクトプラグや他探針と接触してしまう。測定対象外のコンタクトプラグへの接触は、測定値の信頼性を低下させるとともに、接触探針の交換による測定スループットの低下を招く。
【0009】
上記問題点に鑑み、本発明の目的は、微細化されたデバイスの特性評価のために、プローブ相互間及び試料とプローブとの位置関係を把握して、信頼性の高い検査装置及び検査方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置を提供する。
【0011】
前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする。
【発明の効果】
【0012】
本発明により、プローブと試料の位置関係及びプローブ同士の位置関係を容易に把握することができ、より信頼性の高いデバイス特性の検査を行うことができる。
【図面の簡単な説明】
【0013】
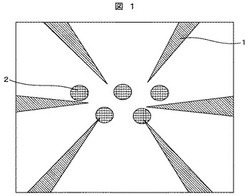
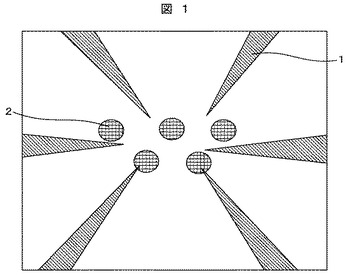
【図1】コンタクトプラグへのナノプロ−ビングを説明するための図。
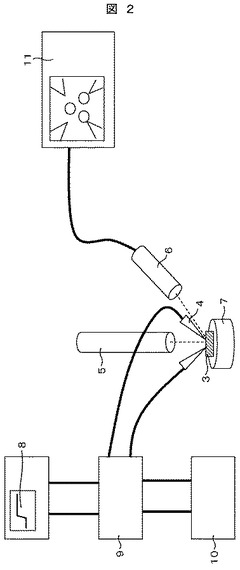
【図2】本発明を説明するための微小電子デバイス特性評価装置の概略図。
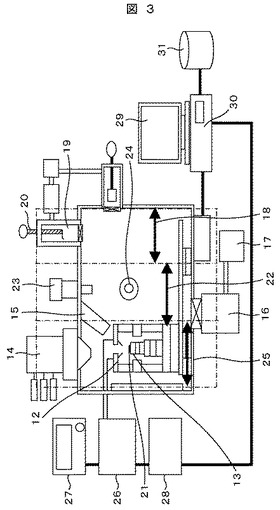
【図3】本発明による微小電子デバイス特性評価装置の実施例を説明するための図。
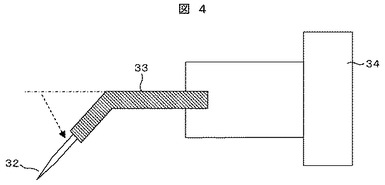
【図4】探針ホルダの説明図。
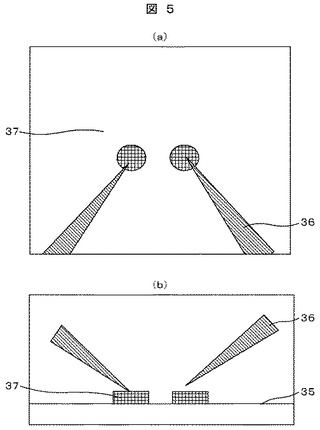
【図5】測定時の試料表面と探針の状態を説明するための図。
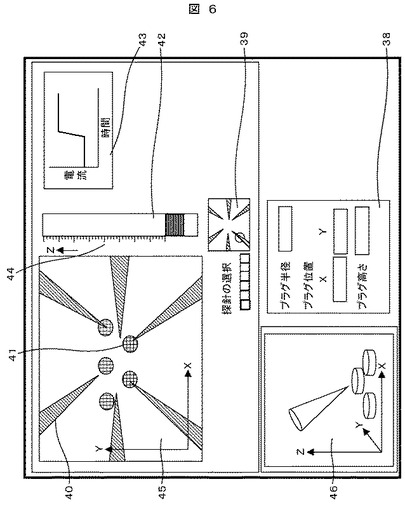
【図6】本発明を実施するためのGUIの模式図。
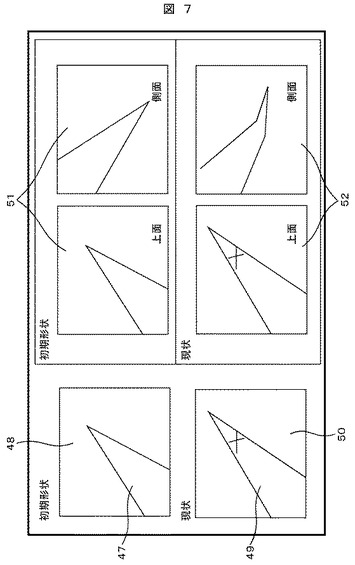
【図7】本発明を実施するためのGUIの模式図。
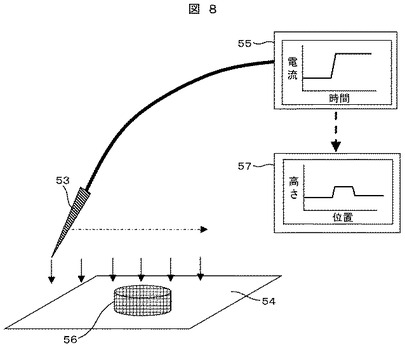
【図8】本発明の試料高さを測定する方法を説明するための図。
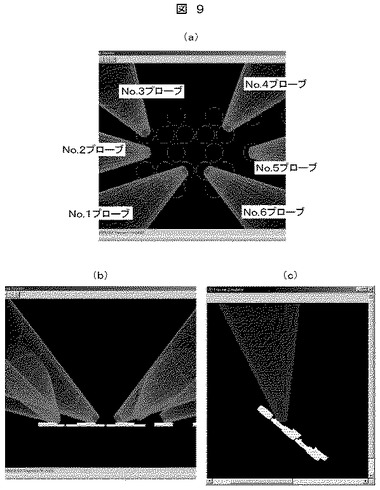
【図9】三次元グラフィックスの表示形態を説明する図。
【発明を実施するための形態】
【0014】
以下、本発明システムに関して説明する。図2は、本発明を説明するための微小電子デバイス特性評価装置の概略図である。
【0015】
本発明におけるSEM利用のナノプロ−ビングシステムは、SEM内で、直接、試料3上の電子デバイスのコンタクトプラグに、探針4を接触させ、電気的な特性を測定する。このSEMは、真空チャンバ内に、試料に電子線を照射するための電子銃5と、電子線が照射されたことにより試料3から発生する2次電子を検出するための2次電子検出器6を配置した構成となっている。ナノプロ−ビングシステムには、試料3表面のコンタクトプラグに探針を接触させるための探針4の駆動機構と、試料3の測定位置を移動するためのステージ7の駆動機構が設けられている。
【0016】
図1に示すように、トランジスタ特性を取得する場合、最低でも、ソース,ドレイン,ゲートのコンタクトプラグへ探針を接触させるため、探針1は3本必要となる。その他、探針1の破損などを考慮した、予備探針を待機させるため、6本以上の探針1が効果的である。
【0017】
探針4やステージ7の移動は、測定者が、制御端末で操作する。電子デバイスの電気特性は、この探針を所望のコンタクトプラグに移動し接触させて、探針7を通して、半導体パラメータアナライザ8に測定信号を送り、電気的特性を取得する。
【0018】
次に本発明の3次元グラフィックス作成方法について説明する。
【0019】
試料3表面から検出された2次電子は、2次電子検出器6への信号をディスプレイ11上に映像化し、SEMから得られるコンタクトプラグ寸法などの電子デバイスのレイアウトデータを、上面方向から得られた情報として、制御端末に送信する。これにより、上面方向からの2次元のデータが取得できる。上面方向からのデータは、SEMから得られる画像だけでなく、半導体の設計データを用いることもできる。SEMから得られる画像であれば、実際の試料のより正確な情報を得ることができる。
【0020】
次に、ウエハ表面に突出したコンタクトプラグの高さや、探針と試料表面まで距離など側面からの情報を取得する。本発明システムを実現するために、探針を試料に接触させ、接触するまでに移動した距離を検知するシステムを付加した。探針は、電気信号の経路を切り替えるためのセレクタ9に接続されている。このセレクタ9は、電子デバイスの電気的な特性を測定するための半導体パラメータアナライザ8と、電気的な変化を検知し、制御端末で、信号処理を可能とするための、アンプ及びアナログ・デジタル変換器(以下、A/D変換器と略記)10に接続している。なお、探針を試料に接触させて試料の側面からの情報を取得したが、半導体の設計データに高さの情報も含まれていれば、それを用いることもできる。
【0021】
ここで、本発明におけるアンプ及びA/D変換器10の役割を以下に説明する。従来、電子デバイスのコンタクトプラグの探針を接触させる際、接触検知は、接触した際に生じる探針の弾性変化をSEM像により確認して判断していた。これを垂直方向の高さ測定に用いる場合、探針は弾性変形しているため、変形分の長さが、接触するまでの距離のなかに誤差として含まれる。
【0022】
この誤差要因を取り除くため、本発明では、この弾性変形による接触判断を行わず、探針が試料表面に触れた際の電気的な変化を接触判断に用いる。本電子顕微鏡の中に設置された試料表面には、非常に微弱な電子が照射される。そのため、試料表面には絶えず電子が存在する。この微小な電子が、探針の接触時に、探針に流れ込み、この変化を検知することにより、探針が試料表面に接触したことを判断する。これにより、試料表面に接触するまでの移動距離が、正確に把握できる。
【0023】
また、本説明では、探針の接触により生じる電流を説明したが、それ以外にも探針の接触により生じる電気的変化を利用することが可能である。例えば、試料をグランドに接地することによる微小な電流変化、電子線の帯電のみならず、探針に電位を印加しておくことも効果的である。
【0024】
探針の寸法形状に関しても、予め寸法形状が既知のプローブを用いたり、電子顕微鏡により探針像を取得して、その寸法形状を知ることができる。探針の位置の情報については、SEM像や探針の駆動機構の入力情報により取得することができる。探針の傾きの情報については、探針の駆動機構の入力情報の他、予め探針の角度を所望の角度で決めておいてもよい。
【0025】
以上までの方法によって、コンタクトプラグ径,探針の形状寸法などの上面からの情報と、コンタクトプラグ径の高さや、コンタクトプラグと探針の距離などの側面情報を基に、3次元グラフィックスを構築する。
【0026】
ここに構築された3次元グラフィックスは、上面からの観察のみならず、側面や斜め方向からの位置関係を観察できる。従って、仮に探針が測定対象外のコンタクトプラグに接触していた場合、斜め方向からの観察に切り替えることにより、これを検知することができる。これによって、最適な探針とコンタクトプラグのレイアウトを決定することができ、信頼性の高い測定を行うことができる。
【0027】
また、実際の測定では、探針の使用頻度が増すにつれ、探針まがりなどの塑性変形が生じる。実際の測定では、探針が若干曲がった状態でも使用することが多い。この状態について探針の3次元グラフィックを作成するために、粒子法などの応力シミュレーションを、3次元グラフィックスを構築する際に行えば、変形しつつある探針の最適な測定レイアウトを決定できる。また、探針の交換時期や、探針の傾きなどの意思決定を支援することもできる。
【実施例1】
【0028】
本発明による微小電子デバイス特性評価装置の実施例を、図3に示す。微小電子デバイス特性評価装置は、SEMの内部にデバイス特性を測定するための探針12と、測定試料となる電子デバイスを設置できるステージ13が備わっている。このSEMは、電子線を照射するための電子銃14と、電子線を照射することにより発生する2次電子検出器15から構成される。これらは、ターボ分子ポンプ16とドライポンプ17により排気された、真空チャンバ内に配置する。この真空チャンバは、電子顕微鏡による試料の観察領域25と、光学顕微鏡による試料の観察領域22、及び、探針の交換領域18を同一チャンバ内に設けている。測定試料を設置するステージ13は、電子銃14の真下に配置されている。さらにステージ13と電子銃14の間に、6本の探針12が配置されている。そして、この探針12は、試料表面を移動するための駆動装置で固定している。
【0029】
図4は、探針12を固定している探針ホルダの説明図である。コンタクトプラグへの接触は電界研磨によって、先端径を尖らせたタングステン探針32で行う。このタングステン探針32は、銅のパイプ33に保持される。探針が応力変形した際に、この銅パイプごと交換し、測定を継続させることができる。さらに、この銅パイプ33を所望の角度で折り曲げることにより、最適な探針レイアウトでの測定が可能となる。また、探針12の傾きは、駆動装置に傾きを変える機構を持たせることもでも変えることができる。
【0030】
探針12とステージ13は、駆動装置によりチャンバ内を移動することが可能である。銅パイプは図4のホルダに設置し、探針の交換領域18へ移動させることにより、探針の交換室19へ、引き上げ用の棒20にて引き上げ、探針12を交換することができる。
【0031】
測定のために、探針12を測定試料21に接触させる際、はじめに、ステージを光学顕微鏡による試料の観察領域22へ移動する。この光学顕微鏡の観察領域22には、試料の上面方向から観察するCCDカメラ23と、側面方向から観察するCCDカメラ24が設置されている。これらのCCDカメラ23,24の映像は、モニタ上でSEM像と切り替えることにより観察できる。この観察によって、約0.1mm以上の精度での測定コンタクトプラグへ、荒く移動することが可能である。この移動により、精度は悪いが、早く所望の測定場所へ移動できる。実際の測定パターンは、100nm以下であり、荒く位置あわせを行ったあとは、電子顕微鏡による試料の観察領域25へ移動し、より精密に探針を測定位置へ移動する。
【0032】
探針12,36は、電気信号の経路を切り替えるためのセレクタ26に接続している。このセレクタ26には、電子デバイスの電気的な特性を測定するための半導体パラメータアナライザ27と、電気的な変化を検知し、制御端末で、信号処理を可能とするための、アンプ及びA/D変換器28に接続している。
【0033】
以上までの駆動、例えば、探針12やステージ13の移動は、ディスプレイ29に表示されているグラフィカルユーザインターフェース(以下、GUI(Graphical User Interface)と略記)により制御する。このディスプレイ29は、制御系への信号伝達や、三次元グラフィックス画面を構築するための情報処理装置(演算部)30や測定試料のレイアウト情報を蓄積したデータベース31につながっている。
【0034】
以上までの発明システムの効果を説明するため、本システムの使用例を以下に記述する。
【0035】
図5は、測定時の試料表面35と探針36の状態を説明するための図である。図5(a)は上面図であり、図5(b)は側面図である。試料表面35は、研磨及び表面エッチングによって、コンタクトプラグ37が露出した状態となっている。前処理として表面エッチングを行った際、コンタクトプラグ37とその周囲の材料の相違により、エッチング速度の差が生じる。これにより、コンタクトプラグ37の表面は、試料表面35よりも高く位置している。
【0036】
図6は、ディスプレイ29に表示している、本発明を実施するためのGUIの模式図である。
【0037】
探針12の移動や、ステージ13の移動など本発明に関連しない部分は省略した。数値入力欄38に、SEM像により測定したコンタクトプラグ37の半径及びコンタクトプラグ37の位置座標を入力する。予め、CADデータなどによりコンタクトプラグ37の位置や、コンタクトプラグ37の半径が把握できる場合、この値を入力することも可能である。
【0038】
次にコンタクトプラグ37の高さを測定する。この時、セレクタ26を、アンプ及びA/D変換器28に切り替える。図6のGUI上の探針選択欄39で、使用する探針40を選択し、この探針を用いて、コンタクトプラグ41表面に接触させる。探針は、GUI中のスライダ42を動かすことにより、コンタクトプラグ37,41に向い下りていく(図5)。このスライダ42の動く量は、探針の上下移動の方向への移動距離と対応している。この探針を落とす際、GUI上にて時間を横軸として、探針に流れる電流量を、電流モニタ43でモニタしておく。予めSEM光学条件や、探針に印加する電圧などを調整し、探針が接触した際に生じる最良の電流の変化を調整しておくと、より測定精度を高めることができる。始めに、スライダ42を動かし、コンタクトプラグ37,41上への探針を落とす。GUI上の電流モニタ43に変化が見られたら、スライダ42を止め、停止したスライダの目盛44を記録する。次に、探針位置をずらし、コンタクトプラグ以外の領域45に、探針を接触させる。コンタクトプラグ41への接触と同じように、電流の変化をGUIから確認した時のスライダ目盛44の位置を読み取る。コンタクトプラグ41の目盛値とコンタクトプラグ以外の領域の目盛値の差から、コンタクトプラグ41先端からコンタクトプラグ以外の領域までの高さに換算し、コンタクトプラグ41自身の高さを読み取る。この読み取った値を、3次元描画用のGUIの数値入力欄38に入力する。
【0039】
図6のGUIを制御する3次元描画用のソフトには、予め、円錐,円柱などの基本的な3次元形状を描画するためのプログラムコードが準備されており、コンタクトプラグ41を円柱として近似し、この円柱の底面の半径をコンタクトプラグ半径に割り当て仮想空間に配置する。配置は、SEMの測定データか、半導体の設計データを用いればよい。
【0040】
探針の寸法形状に関して、予め寸法形状が既知のプローブを用いたり、電子顕微鏡により探針像を取得して、その寸法形状を知ることができる。探針の位置については、SEM像を用いるほか、探針の駆動機構の入力情報により取得することができる。傾きについては、探針の駆動機構の入力情報により取得できる他、予め銅パイプ33を所望の角度で折り曲げておいてもよい。
【0041】
そして、探針は円錐として近似し、立体角などの入力して、仮想空間の描画ウインドウ46に配置する。これらの形状は、より複雑かつ精密な物体形状を作成し、仮想空間の描画ウインドウ46に配置しても構わない。
【0042】
以上までの操作により、3次元描画用のGUIに配置した仮想空間の描画ウインドウ46に、実際に測定している状態を、仮想的に表現することができ、上面からの視点のみならず、側面やあらゆる角度からの観察がシミュレーションを通して可能となった。
【0043】
図9(a),(b),(c)はそれぞれ、探針と試料の三次元グラフィックスの上,横,斜めから見た図である。このように、三次元グラフィックスは任意の方向からの図が表示可能である。
【0044】
この観察を行うことによって、どのコンタクトプラグ41をどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグ41に接触しないか等、測定の前に決定することができる。
【0045】
3次元グラフィックスにより、目的のプラグと接触しているかや他の探針と接触しているか等の情報は得られるので、他のプラグと接触していたり、他の探針と接触している場合には、ディスプレイ29にエラーを表示することができる。また、正しく接触するように、自動的に配置を計算し、計算された配置となるように自動調整することもできる。
【0046】
例えば、探針を空間の領域として示し、探針の領域同士が重なった場合には、エラー表示をしたり、配置を再計算したりすることができる。
【実施例2】
【0047】
本発明における微小電子デバイス特性評価装置の一例を示す。図7は、実施の形態2を説明するためのGUIの模式図である。本GUIの機能を、図6のGUIに追加する。その他の形態は、実施の形態1と同様である。SEM像にて、測定前の探針47形状を撮影し、測定前の探針のSEM画像48に保存する。この測定前の探針47で、測定を繰り返し、探針の変形の可能性が生じた際、現状の探針49の様子として、現状の探針のSEM画像50に保存する。
【0048】
図7のGUIには、SEM画像ウインドウ以外に、コンピュータグラフィックスにより探針形状を描画しているウインドウを有する。初期の探針形状を、実施の形態1の方法で、コンピュータグラフィックスにより、測定前の探針のコンピュータグラフィックス画像51に描画する。この探針形状のデータを基に、粒子法などの応力変形シミュレーションを行い、現状の探針のSEM画像50と同様の寸法となるように、シミュレーションによって探針を変形させていく。
【0049】
この時の変形は、コンタクトプラグ上に接触する時に生じる応力と同様の状態によって変形していく。シミュレーションによる探針の変形結果は、現状の探針のコンピュータグラフィックス画像52に表示する。形状が同一になった際、この探針のオブジェクトを図6の3次元描画用ソフトの仮想空間の描画ウインドウ46に送り、この状態で観察を行うことによって、どのコンタクトプラグをどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグに接触しないかなど、測定の前に決定することができる。
【実施例3】
【0050】
本発明における微小電子デバイス特性評価装置の一例を示す。本実施例では、図6の3次元描画用ソフトの仮想空間の描画ウインドウ46中への、コンタクトプラグ形状や探針の配置を自動的に作成する機能を追加する。始めに、上面からのSEM像を用いて、画像認識技術により測定コンタクトプラグの半径と探針の寸法形状を画像認識により読み取る。
【0051】
次に、コンタクトプラグ高さなどの試料の表面形状を測定する。図8は、表面形状を自動認識する方法を説明するための図である。探針53を、自動的に、等間隔で、試料表面54に落としていく。探針の電流モニタ55により、電流の変化が生じた際、探針53を自動的に止め、探針53が停止した時探針53位置を記録していく。探針53を落とした位置を横軸として、高さをプロットすることにより、試料表面にあるコンタクトプラグ56形状を形状寸法のモニタ57に描画できる。これらの形状データから、プラグ高さを読み取り、図6の3次元描画用ソフトの仮想空間の描画ウインドウ46に寸法データを送る。この観察を行うことによって、どのコンタクトプラグをどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグに接触しないか等、測定の前に容易に決定することができる。3次元グラフィックスにより、目的のプラグと接触しているかや他の探針と接触しているか等の情報は得られるので、他のプラグと接触していたり、他の探針と接触している場合には、ディスプレイ29にエラーを表示することができる。また、正しく接触するように、自動的に配置を計算し、計算された配置となるように自動調整することもできる。
【0052】
例えば、探針を空間の領域として示し、探針の領域同士が重なった場合には、エラー表示をしたり、配置を再計算したりすることができる。
【実施例4】
【0053】
本発明における微小電子デバイス特性評価装置の一例を示す。基本となるシステム構造は、実施の形態3に従う。仮想空間上で、試料表面のコンタクトプラグと探針を配置した後、この仮想空間の動きと実際の探針とステージの動きを連動させる。
【0054】
具体的には、三次元グラフィックス上での画像上の探針,試料の移動を探針の駆動装置による探針移動量,ステージの駆動装置のステージ移動量に変換する制御部により行う。
【0055】
これによって、測定者は、SEM像のみならず、三次元グラフィックスの仮想空間上での任意の視点から観察しながら、コンタクトプラグに、探針を接触させることができる。これによって、探針同士の接触や想定外のコンタクトプラグへの探針の接触など測定異常を回避し、同時に測定が簡便化され、測定のスループットが向上できる。
【実施例5】
【0056】
本発明における微小電子デバイス特性評価装置の一例を示す。基本となるシステム構造は、実施の形態4に従う。仮想空間上で、試料表面のコンタクトプラグと探針を配置した後、この仮想空間の動きと実際の探針とステージの動きを連動させる。次に、コンタクトプラグに接触するまでの探針の軌道を、図6の3次元描画用のソフトに読み込む。この軌道に従って、探針を実際に動かす。探針がコンタクトプラグに接触した際の電流変化を検知し、探針を停止させる。これにより、自動的にコンタクトプラグに探針を接触させることができる。従って、探針同士の接触や想定外のコンタクトプラグへの探針の接触など測定異常を回避しながら、同時に測定が簡便化され、測定のスループットが向上できる。
【0057】
本発明は、65nm世代以降のトランジスタなど、微小電子デバイスの不良解析において、信頼性の高い評価装置を提供できる。さらに本願発明は、測定不良を低減できる。従って、不良解析における測定のスループットを向上することができる。
【符号の説明】
【0058】
1,4,12,36,40,47,53 探針
2,37,41,56 コンタクトプラグ
3 試料
5,14 電子銃
6,15 2次電子検出器
8,27 半導体パラメータアナライザ
9,26 セレクタ
10,28 アンプ及びA/D変換器
11,29 ディスプレイ
7,13 ステージ
16 ターボ分子ポンプ
17 ドライポンプ
18 探針の交換領域
19 探針の交換室
20 引き上げ棒
21 測定試料
22 光学顕微鏡による試料の観察領域
23 上面方向から観察するCCDカメラ
24 側面方向から観察するCCDカメラ
25 電子線顕微鏡による試料の観察領域
30 情報処理装置(演算部)
31 データベース
32 タングステン探針
33 銅パイプ
34 探針ホルダ
35,54 試料表面
38 数値入力欄
39 探針選択欄
42 スライダ
43 電流モニタ
44 スライダ目盛
45 コンタクトプラグ以外の領域
46 仮想空間の描画ウインドウ
47 測定前の探針
48 測定前の探針のSEM画像
49 現状の探針
50 現状の探針のSEM画像
51 測定前の探針のコンピュータグラフィックス画像
52 現状の探針のコンピュータグラフィックス画像
55 電流モニタ
57 形状寸法モニタ
【技術分野】
【0001】
本発明は、検査装置及び検査方法に関し、特に微小電子デバイスの特性評価を行う検査装置及び検査方法に関する。
【背景技術】
【0002】
半導体デバイスの製造分野では、新デバイスのプロセスの立ち上げ期間の短縮や、高歩留まり化のために、故障解析技術の高精度や高スループット化が不可欠である。しかし、デバイスの高性能や高機能化に伴い、デバイス設計や、微細化された製造プロセスは複雑となってきた。
【0003】
このような微細化されたデバイスの故障セルまでの特定は、従来までの故障診断や故障箇所の絞り込みで可能であった。しかしセルは、複数のトランジスタや配線で成り立っており、詳細な解析を行うためには、不良トランジスタ、或いはゲート,ソース,ドレイン,コンタクト,ビアなど、さらなる異常箇所の絞り込みが重要となってきた。
【0004】
そこで、詳細な異常個所を特定する技術として、極めて微細な探針を、直接回路上に接触させ、トランジスタの電気特性を評価する手法(ナノプロ−ビング)が提案された。この方法によれば、詳細な不良箇所が特定できるだけでなく、電気特性の異常から原因の推定も可能である。従って、最終的な試料の破壊分析となる物理解析において最良の手段を選択することができる。本手法より、故障解析が迅速化するとともに、故障解析自体の信頼性は向上する。
【0005】
このようなナノプロ−ビングシステムとして、原子間力顕微鏡(以下、AFM(Atomic Force Microscope)と略記)を用いて、微小な探針をトランジスタのコンタクトプラグに接触させる方法と、特許文献1のような走査型電子顕微鏡(以下SEM(Scanning Electron Microscope)と略記)を用いて探針を接触させる方法が提案されている。
【0006】
SEM利用のナノプロ−ビングシステムでは、試料表面に電子線を照射し、得られる2次電子を検出器に取り込み映像化する。このSEM像によって、探針とコンタクトプラグを観察しながら、探針を接触させる。しかし、試料表面の上面映像のみを観察しているため、試料表面と探針の距離など、側面からの様子が把握できなかった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−189239号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
微細化されたデバイス、特に65nm世代以降のDRAM測定では、コンタクトプラグの微小化や密集化が生じる。このためコンタクトプラグや探針同士の近接化が生じる。このため、複数のコンタクトプラグへ探針を接触させる際、探針が測定対象外のコンタクトプラグや他探針と接触してしまう。測定対象外のコンタクトプラグへの接触は、測定値の信頼性を低下させるとともに、接触探針の交換による測定スループットの低下を招く。
【0009】
上記問題点に鑑み、本発明の目的は、微細化されたデバイスの特性評価のために、プローブ相互間及び試料とプローブとの位置関係を把握して、信頼性の高い検査装置及び検査方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置を提供する。
【0011】
前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする。
【発明の効果】
【0012】
本発明により、プローブと試料の位置関係及びプローブ同士の位置関係を容易に把握することができ、より信頼性の高いデバイス特性の検査を行うことができる。
【図面の簡単な説明】
【0013】
【図1】コンタクトプラグへのナノプロ−ビングを説明するための図。
【図2】本発明を説明するための微小電子デバイス特性評価装置の概略図。
【図3】本発明による微小電子デバイス特性評価装置の実施例を説明するための図。
【図4】探針ホルダの説明図。
【図5】測定時の試料表面と探針の状態を説明するための図。
【図6】本発明を実施するためのGUIの模式図。
【図7】本発明を実施するためのGUIの模式図。
【図8】本発明の試料高さを測定する方法を説明するための図。
【図9】三次元グラフィックスの表示形態を説明する図。
【発明を実施するための形態】
【0014】
以下、本発明システムに関して説明する。図2は、本発明を説明するための微小電子デバイス特性評価装置の概略図である。
【0015】
本発明におけるSEM利用のナノプロ−ビングシステムは、SEM内で、直接、試料3上の電子デバイスのコンタクトプラグに、探針4を接触させ、電気的な特性を測定する。このSEMは、真空チャンバ内に、試料に電子線を照射するための電子銃5と、電子線が照射されたことにより試料3から発生する2次電子を検出するための2次電子検出器6を配置した構成となっている。ナノプロ−ビングシステムには、試料3表面のコンタクトプラグに探針を接触させるための探針4の駆動機構と、試料3の測定位置を移動するためのステージ7の駆動機構が設けられている。
【0016】
図1に示すように、トランジスタ特性を取得する場合、最低でも、ソース,ドレイン,ゲートのコンタクトプラグへ探針を接触させるため、探針1は3本必要となる。その他、探針1の破損などを考慮した、予備探針を待機させるため、6本以上の探針1が効果的である。
【0017】
探針4やステージ7の移動は、測定者が、制御端末で操作する。電子デバイスの電気特性は、この探針を所望のコンタクトプラグに移動し接触させて、探針7を通して、半導体パラメータアナライザ8に測定信号を送り、電気的特性を取得する。
【0018】
次に本発明の3次元グラフィックス作成方法について説明する。
【0019】
試料3表面から検出された2次電子は、2次電子検出器6への信号をディスプレイ11上に映像化し、SEMから得られるコンタクトプラグ寸法などの電子デバイスのレイアウトデータを、上面方向から得られた情報として、制御端末に送信する。これにより、上面方向からの2次元のデータが取得できる。上面方向からのデータは、SEMから得られる画像だけでなく、半導体の設計データを用いることもできる。SEMから得られる画像であれば、実際の試料のより正確な情報を得ることができる。
【0020】
次に、ウエハ表面に突出したコンタクトプラグの高さや、探針と試料表面まで距離など側面からの情報を取得する。本発明システムを実現するために、探針を試料に接触させ、接触するまでに移動した距離を検知するシステムを付加した。探針は、電気信号の経路を切り替えるためのセレクタ9に接続されている。このセレクタ9は、電子デバイスの電気的な特性を測定するための半導体パラメータアナライザ8と、電気的な変化を検知し、制御端末で、信号処理を可能とするための、アンプ及びアナログ・デジタル変換器(以下、A/D変換器と略記)10に接続している。なお、探針を試料に接触させて試料の側面からの情報を取得したが、半導体の設計データに高さの情報も含まれていれば、それを用いることもできる。
【0021】
ここで、本発明におけるアンプ及びA/D変換器10の役割を以下に説明する。従来、電子デバイスのコンタクトプラグの探針を接触させる際、接触検知は、接触した際に生じる探針の弾性変化をSEM像により確認して判断していた。これを垂直方向の高さ測定に用いる場合、探針は弾性変形しているため、変形分の長さが、接触するまでの距離のなかに誤差として含まれる。
【0022】
この誤差要因を取り除くため、本発明では、この弾性変形による接触判断を行わず、探針が試料表面に触れた際の電気的な変化を接触判断に用いる。本電子顕微鏡の中に設置された試料表面には、非常に微弱な電子が照射される。そのため、試料表面には絶えず電子が存在する。この微小な電子が、探針の接触時に、探針に流れ込み、この変化を検知することにより、探針が試料表面に接触したことを判断する。これにより、試料表面に接触するまでの移動距離が、正確に把握できる。
【0023】
また、本説明では、探針の接触により生じる電流を説明したが、それ以外にも探針の接触により生じる電気的変化を利用することが可能である。例えば、試料をグランドに接地することによる微小な電流変化、電子線の帯電のみならず、探針に電位を印加しておくことも効果的である。
【0024】
探針の寸法形状に関しても、予め寸法形状が既知のプローブを用いたり、電子顕微鏡により探針像を取得して、その寸法形状を知ることができる。探針の位置の情報については、SEM像や探針の駆動機構の入力情報により取得することができる。探針の傾きの情報については、探針の駆動機構の入力情報の他、予め探針の角度を所望の角度で決めておいてもよい。
【0025】
以上までの方法によって、コンタクトプラグ径,探針の形状寸法などの上面からの情報と、コンタクトプラグ径の高さや、コンタクトプラグと探針の距離などの側面情報を基に、3次元グラフィックスを構築する。
【0026】
ここに構築された3次元グラフィックスは、上面からの観察のみならず、側面や斜め方向からの位置関係を観察できる。従って、仮に探針が測定対象外のコンタクトプラグに接触していた場合、斜め方向からの観察に切り替えることにより、これを検知することができる。これによって、最適な探針とコンタクトプラグのレイアウトを決定することができ、信頼性の高い測定を行うことができる。
【0027】
また、実際の測定では、探針の使用頻度が増すにつれ、探針まがりなどの塑性変形が生じる。実際の測定では、探針が若干曲がった状態でも使用することが多い。この状態について探針の3次元グラフィックを作成するために、粒子法などの応力シミュレーションを、3次元グラフィックスを構築する際に行えば、変形しつつある探針の最適な測定レイアウトを決定できる。また、探針の交換時期や、探針の傾きなどの意思決定を支援することもできる。
【実施例1】
【0028】
本発明による微小電子デバイス特性評価装置の実施例を、図3に示す。微小電子デバイス特性評価装置は、SEMの内部にデバイス特性を測定するための探針12と、測定試料となる電子デバイスを設置できるステージ13が備わっている。このSEMは、電子線を照射するための電子銃14と、電子線を照射することにより発生する2次電子検出器15から構成される。これらは、ターボ分子ポンプ16とドライポンプ17により排気された、真空チャンバ内に配置する。この真空チャンバは、電子顕微鏡による試料の観察領域25と、光学顕微鏡による試料の観察領域22、及び、探針の交換領域18を同一チャンバ内に設けている。測定試料を設置するステージ13は、電子銃14の真下に配置されている。さらにステージ13と電子銃14の間に、6本の探針12が配置されている。そして、この探針12は、試料表面を移動するための駆動装置で固定している。
【0029】
図4は、探針12を固定している探針ホルダの説明図である。コンタクトプラグへの接触は電界研磨によって、先端径を尖らせたタングステン探針32で行う。このタングステン探針32は、銅のパイプ33に保持される。探針が応力変形した際に、この銅パイプごと交換し、測定を継続させることができる。さらに、この銅パイプ33を所望の角度で折り曲げることにより、最適な探針レイアウトでの測定が可能となる。また、探針12の傾きは、駆動装置に傾きを変える機構を持たせることもでも変えることができる。
【0030】
探針12とステージ13は、駆動装置によりチャンバ内を移動することが可能である。銅パイプは図4のホルダに設置し、探針の交換領域18へ移動させることにより、探針の交換室19へ、引き上げ用の棒20にて引き上げ、探針12を交換することができる。
【0031】
測定のために、探針12を測定試料21に接触させる際、はじめに、ステージを光学顕微鏡による試料の観察領域22へ移動する。この光学顕微鏡の観察領域22には、試料の上面方向から観察するCCDカメラ23と、側面方向から観察するCCDカメラ24が設置されている。これらのCCDカメラ23,24の映像は、モニタ上でSEM像と切り替えることにより観察できる。この観察によって、約0.1mm以上の精度での測定コンタクトプラグへ、荒く移動することが可能である。この移動により、精度は悪いが、早く所望の測定場所へ移動できる。実際の測定パターンは、100nm以下であり、荒く位置あわせを行ったあとは、電子顕微鏡による試料の観察領域25へ移動し、より精密に探針を測定位置へ移動する。
【0032】
探針12,36は、電気信号の経路を切り替えるためのセレクタ26に接続している。このセレクタ26には、電子デバイスの電気的な特性を測定するための半導体パラメータアナライザ27と、電気的な変化を検知し、制御端末で、信号処理を可能とするための、アンプ及びA/D変換器28に接続している。
【0033】
以上までの駆動、例えば、探針12やステージ13の移動は、ディスプレイ29に表示されているグラフィカルユーザインターフェース(以下、GUI(Graphical User Interface)と略記)により制御する。このディスプレイ29は、制御系への信号伝達や、三次元グラフィックス画面を構築するための情報処理装置(演算部)30や測定試料のレイアウト情報を蓄積したデータベース31につながっている。
【0034】
以上までの発明システムの効果を説明するため、本システムの使用例を以下に記述する。
【0035】
図5は、測定時の試料表面35と探針36の状態を説明するための図である。図5(a)は上面図であり、図5(b)は側面図である。試料表面35は、研磨及び表面エッチングによって、コンタクトプラグ37が露出した状態となっている。前処理として表面エッチングを行った際、コンタクトプラグ37とその周囲の材料の相違により、エッチング速度の差が生じる。これにより、コンタクトプラグ37の表面は、試料表面35よりも高く位置している。
【0036】
図6は、ディスプレイ29に表示している、本発明を実施するためのGUIの模式図である。
【0037】
探針12の移動や、ステージ13の移動など本発明に関連しない部分は省略した。数値入力欄38に、SEM像により測定したコンタクトプラグ37の半径及びコンタクトプラグ37の位置座標を入力する。予め、CADデータなどによりコンタクトプラグ37の位置や、コンタクトプラグ37の半径が把握できる場合、この値を入力することも可能である。
【0038】
次にコンタクトプラグ37の高さを測定する。この時、セレクタ26を、アンプ及びA/D変換器28に切り替える。図6のGUI上の探針選択欄39で、使用する探針40を選択し、この探針を用いて、コンタクトプラグ41表面に接触させる。探針は、GUI中のスライダ42を動かすことにより、コンタクトプラグ37,41に向い下りていく(図5)。このスライダ42の動く量は、探針の上下移動の方向への移動距離と対応している。この探針を落とす際、GUI上にて時間を横軸として、探針に流れる電流量を、電流モニタ43でモニタしておく。予めSEM光学条件や、探針に印加する電圧などを調整し、探針が接触した際に生じる最良の電流の変化を調整しておくと、より測定精度を高めることができる。始めに、スライダ42を動かし、コンタクトプラグ37,41上への探針を落とす。GUI上の電流モニタ43に変化が見られたら、スライダ42を止め、停止したスライダの目盛44を記録する。次に、探針位置をずらし、コンタクトプラグ以外の領域45に、探針を接触させる。コンタクトプラグ41への接触と同じように、電流の変化をGUIから確認した時のスライダ目盛44の位置を読み取る。コンタクトプラグ41の目盛値とコンタクトプラグ以外の領域の目盛値の差から、コンタクトプラグ41先端からコンタクトプラグ以外の領域までの高さに換算し、コンタクトプラグ41自身の高さを読み取る。この読み取った値を、3次元描画用のGUIの数値入力欄38に入力する。
【0039】
図6のGUIを制御する3次元描画用のソフトには、予め、円錐,円柱などの基本的な3次元形状を描画するためのプログラムコードが準備されており、コンタクトプラグ41を円柱として近似し、この円柱の底面の半径をコンタクトプラグ半径に割り当て仮想空間に配置する。配置は、SEMの測定データか、半導体の設計データを用いればよい。
【0040】
探針の寸法形状に関して、予め寸法形状が既知のプローブを用いたり、電子顕微鏡により探針像を取得して、その寸法形状を知ることができる。探針の位置については、SEM像を用いるほか、探針の駆動機構の入力情報により取得することができる。傾きについては、探針の駆動機構の入力情報により取得できる他、予め銅パイプ33を所望の角度で折り曲げておいてもよい。
【0041】
そして、探針は円錐として近似し、立体角などの入力して、仮想空間の描画ウインドウ46に配置する。これらの形状は、より複雑かつ精密な物体形状を作成し、仮想空間の描画ウインドウ46に配置しても構わない。
【0042】
以上までの操作により、3次元描画用のGUIに配置した仮想空間の描画ウインドウ46に、実際に測定している状態を、仮想的に表現することができ、上面からの視点のみならず、側面やあらゆる角度からの観察がシミュレーションを通して可能となった。
【0043】
図9(a),(b),(c)はそれぞれ、探針と試料の三次元グラフィックスの上,横,斜めから見た図である。このように、三次元グラフィックスは任意の方向からの図が表示可能である。
【0044】
この観察を行うことによって、どのコンタクトプラグ41をどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグ41に接触しないか等、測定の前に決定することができる。
【0045】
3次元グラフィックスにより、目的のプラグと接触しているかや他の探針と接触しているか等の情報は得られるので、他のプラグと接触していたり、他の探針と接触している場合には、ディスプレイ29にエラーを表示することができる。また、正しく接触するように、自動的に配置を計算し、計算された配置となるように自動調整することもできる。
【0046】
例えば、探針を空間の領域として示し、探針の領域同士が重なった場合には、エラー表示をしたり、配置を再計算したりすることができる。
【実施例2】
【0047】
本発明における微小電子デバイス特性評価装置の一例を示す。図7は、実施の形態2を説明するためのGUIの模式図である。本GUIの機能を、図6のGUIに追加する。その他の形態は、実施の形態1と同様である。SEM像にて、測定前の探針47形状を撮影し、測定前の探針のSEM画像48に保存する。この測定前の探針47で、測定を繰り返し、探針の変形の可能性が生じた際、現状の探針49の様子として、現状の探針のSEM画像50に保存する。
【0048】
図7のGUIには、SEM画像ウインドウ以外に、コンピュータグラフィックスにより探針形状を描画しているウインドウを有する。初期の探針形状を、実施の形態1の方法で、コンピュータグラフィックスにより、測定前の探針のコンピュータグラフィックス画像51に描画する。この探針形状のデータを基に、粒子法などの応力変形シミュレーションを行い、現状の探針のSEM画像50と同様の寸法となるように、シミュレーションによって探針を変形させていく。
【0049】
この時の変形は、コンタクトプラグ上に接触する時に生じる応力と同様の状態によって変形していく。シミュレーションによる探針の変形結果は、現状の探針のコンピュータグラフィックス画像52に表示する。形状が同一になった際、この探針のオブジェクトを図6の3次元描画用ソフトの仮想空間の描画ウインドウ46に送り、この状態で観察を行うことによって、どのコンタクトプラグをどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグに接触しないかなど、測定の前に決定することができる。
【実施例3】
【0050】
本発明における微小電子デバイス特性評価装置の一例を示す。本実施例では、図6の3次元描画用ソフトの仮想空間の描画ウインドウ46中への、コンタクトプラグ形状や探針の配置を自動的に作成する機能を追加する。始めに、上面からのSEM像を用いて、画像認識技術により測定コンタクトプラグの半径と探針の寸法形状を画像認識により読み取る。
【0051】
次に、コンタクトプラグ高さなどの試料の表面形状を測定する。図8は、表面形状を自動認識する方法を説明するための図である。探針53を、自動的に、等間隔で、試料表面54に落としていく。探針の電流モニタ55により、電流の変化が生じた際、探針53を自動的に止め、探針53が停止した時探針53位置を記録していく。探針53を落とした位置を横軸として、高さをプロットすることにより、試料表面にあるコンタクトプラグ56形状を形状寸法のモニタ57に描画できる。これらの形状データから、プラグ高さを読み取り、図6の3次元描画用ソフトの仮想空間の描画ウインドウ46に寸法データを送る。この観察を行うことによって、どのコンタクトプラグをどの探針で接触させるか、探針同士の接触はないか、或いは、想定外のコンタクトプラグに接触しないか等、測定の前に容易に決定することができる。3次元グラフィックスにより、目的のプラグと接触しているかや他の探針と接触しているか等の情報は得られるので、他のプラグと接触していたり、他の探針と接触している場合には、ディスプレイ29にエラーを表示することができる。また、正しく接触するように、自動的に配置を計算し、計算された配置となるように自動調整することもできる。
【0052】
例えば、探針を空間の領域として示し、探針の領域同士が重なった場合には、エラー表示をしたり、配置を再計算したりすることができる。
【実施例4】
【0053】
本発明における微小電子デバイス特性評価装置の一例を示す。基本となるシステム構造は、実施の形態3に従う。仮想空間上で、試料表面のコンタクトプラグと探針を配置した後、この仮想空間の動きと実際の探針とステージの動きを連動させる。
【0054】
具体的には、三次元グラフィックス上での画像上の探針,試料の移動を探針の駆動装置による探針移動量,ステージの駆動装置のステージ移動量に変換する制御部により行う。
【0055】
これによって、測定者は、SEM像のみならず、三次元グラフィックスの仮想空間上での任意の視点から観察しながら、コンタクトプラグに、探針を接触させることができる。これによって、探針同士の接触や想定外のコンタクトプラグへの探針の接触など測定異常を回避し、同時に測定が簡便化され、測定のスループットが向上できる。
【実施例5】
【0056】
本発明における微小電子デバイス特性評価装置の一例を示す。基本となるシステム構造は、実施の形態4に従う。仮想空間上で、試料表面のコンタクトプラグと探針を配置した後、この仮想空間の動きと実際の探針とステージの動きを連動させる。次に、コンタクトプラグに接触するまでの探針の軌道を、図6の3次元描画用のソフトに読み込む。この軌道に従って、探針を実際に動かす。探針がコンタクトプラグに接触した際の電流変化を検知し、探針を停止させる。これにより、自動的にコンタクトプラグに探針を接触させることができる。従って、探針同士の接触や想定外のコンタクトプラグへの探針の接触など測定異常を回避しながら、同時に測定が簡便化され、測定のスループットが向上できる。
【0057】
本発明は、65nm世代以降のトランジスタなど、微小電子デバイスの不良解析において、信頼性の高い評価装置を提供できる。さらに本願発明は、測定不良を低減できる。従って、不良解析における測定のスループットを向上することができる。
【符号の説明】
【0058】
1,4,12,36,40,47,53 探針
2,37,41,56 コンタクトプラグ
3 試料
5,14 電子銃
6,15 2次電子検出器
8,27 半導体パラメータアナライザ
9,26 セレクタ
10,28 アンプ及びA/D変換器
11,29 ディスプレイ
7,13 ステージ
16 ターボ分子ポンプ
17 ドライポンプ
18 探針の交換領域
19 探針の交換室
20 引き上げ棒
21 測定試料
22 光学顕微鏡による試料の観察領域
23 上面方向から観察するCCDカメラ
24 側面方向から観察するCCDカメラ
25 電子線顕微鏡による試料の観察領域
30 情報処理装置(演算部)
31 データベース
32 タングステン探針
33 銅パイプ
34 探針ホルダ
35,54 試料表面
38 数値入力欄
39 探針選択欄
42 スライダ
43 電流モニタ
44 スライダ目盛
45 コンタクトプラグ以外の領域
46 仮想空間の描画ウインドウ
47 測定前の探針
48 測定前の探針のSEM画像
49 現状の探針
50 現状の探針のSEM画像
51 測定前の探針のコンピュータグラフィックス画像
52 現状の探針のコンピュータグラフィックス画像
55 電流モニタ
57 形状寸法モニタ
【特許請求の範囲】
【請求項1】
電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、
前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置。
【請求項2】
請求項1の検査装置において、
前記試料の高さは、前記探針を試料に接触したときの電気信号の変化に基づいて取得することを特徴とする検査装置。
【請求項3】
請求項1の検査装置において、
前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする検査装置。
【請求項4】
請求項1の検査装置において、
前記探針を駆動する探針駆動機構及び前記ステージを駆動するステージ駆動機構を有し、
前記三次元画像中の探針像及び試料像の移動と前記探針及び前記ステージの移動を追従するように、前記探針駆動機構及び前記ステージ駆動機構を制御する制御部を備えることを特徴とする検査装置。
【請求項5】
請求項1の検査装置において、
前記探針の先端部の曲がりの形状を計算する演算部と、
当該演算された探針の形状を前記三次元画像の探針像として用いることを特徴とする検査装置。
【請求項6】
請求項1の検査装置において、
前記探針は、半導体パラメータアナライザと、増幅アンプとアナログ・デジタル変換器からなる電子回路とを切り替えるためのセレクタに接続されていることを特徴とする検査装置。
【請求項7】
請求項1の検査装置において、
前記探針を駆動する駆動装置を有し、前記駆動装置は、前記探針の前記試料に対する接触角度を変更することを特徴とする検査装置。
【請求項8】
請求項1の検査装置において、
複数の前記探針を有し、前記三次元画像上で少なくとも2つ以上の探針像が接触する場合に、前記表示装置に警告を表示することを特徴とする検査装置。
【請求項9】
請求項1の検査装置において、
前記三次元画像上で、前記探針像が前記試料像の所定の位置以外の位置で接触する場合に、前記表示装置に警告を表示することを特徴とする検査装置。
【請求項10】
請求項1の検査装置において、
前記三次元画像上で、前記探針像が前記試料像の所定の位置に接触するように、前記探針像と前記試料像の位置関係を計算する演算部を備えることを特徴とする検査装置。
【請求項1】
電子源と、前記電子源から放出される電子線を試料に照射し、試料から放出される信号を検出する検出器と、試料を搭載するステージと、前記試料に触針する探針と、を有する検査装置において、
前記試料の形状及び前記探針の形状及び配置の情報に基づいて、前記試料と前記探針の三次元画像を構成する演算部を備え、当該三次元画像を表示する表示装置を備えたことを特徴とする検査装置。
【請求項2】
請求項1の検査装置において、
前記試料の高さは、前記探針を試料に接触したときの電気信号の変化に基づいて取得することを特徴とする検査装置。
【請求項3】
請求項1の検査装置において、
前記三次元画像は、任意の方向からの画像を表示することができることを特徴とする検査装置。
【請求項4】
請求項1の検査装置において、
前記探針を駆動する探針駆動機構及び前記ステージを駆動するステージ駆動機構を有し、
前記三次元画像中の探針像及び試料像の移動と前記探針及び前記ステージの移動を追従するように、前記探針駆動機構及び前記ステージ駆動機構を制御する制御部を備えることを特徴とする検査装置。
【請求項5】
請求項1の検査装置において、
前記探針の先端部の曲がりの形状を計算する演算部と、
当該演算された探針の形状を前記三次元画像の探針像として用いることを特徴とする検査装置。
【請求項6】
請求項1の検査装置において、
前記探針は、半導体パラメータアナライザと、増幅アンプとアナログ・デジタル変換器からなる電子回路とを切り替えるためのセレクタに接続されていることを特徴とする検査装置。
【請求項7】
請求項1の検査装置において、
前記探針を駆動する駆動装置を有し、前記駆動装置は、前記探針の前記試料に対する接触角度を変更することを特徴とする検査装置。
【請求項8】
請求項1の検査装置において、
複数の前記探針を有し、前記三次元画像上で少なくとも2つ以上の探針像が接触する場合に、前記表示装置に警告を表示することを特徴とする検査装置。
【請求項9】
請求項1の検査装置において、
前記三次元画像上で、前記探針像が前記試料像の所定の位置以外の位置で接触する場合に、前記表示装置に警告を表示することを特徴とする検査装置。
【請求項10】
請求項1の検査装置において、
前記三次元画像上で、前記探針像が前記試料像の所定の位置に接触するように、前記探針像と前記試料像の位置関係を計算する演算部を備えることを特徴とする検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−33422(P2011−33422A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−178576(P2009−178576)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]