
検査装置
【課題】設置面積を低減可能な検査装置を提供する。
【解決手段】検査装置1では、主軸4が設置面と直交する方向に対して交差する方向に延びている。主軸4が軸線周りに回転すると、主軸4から主軸4の軸線方向と交差する方向に延出した延出体10も回転する。延出体10には、主軸4から離間した位置で検査チップ40を保持するチップホルダ20が設けられている。主軸4の回転によって、主軸4と直交する方向に作用する遠心力が、検査チップ40に付与される。
【解決手段】検査装置1では、主軸4が設置面と直交する方向に対して交差する方向に延びている。主軸4が軸線周りに回転すると、主軸4から主軸4の軸線方向と交差する方向に延出した延出体10も回転する。延出体10には、主軸4から離間した位置で検査チップ40を保持するチップホルダ20が設けられている。主軸4の回転によって、主軸4と直交する方向に作用する遠心力が、検査チップ40に付与される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、化学的、医学的、生物学的な検査を行うための検査装置に関する。詳細には、検査対象受体を回転軸から離間した位置に保持し、検査対象受体を回転させて遠心力を付与する検査装置に関する。
【背景技術】
【0002】
従来、マイクロチップ又は検査チップと呼ばれる検査対象受体を使用して、生体物質及び化学物質等を検査する検査装置が提案されている(例えば、特許文献1参照)。このような検査装置を使用することで、DNA(Deoxyribo Nucleic Acid)、酵素、抗原、抗体、タンパク質、ウィルス、細胞などを検知したり、定量したりすることができる。
【0003】
特許文献1に開示の検査装置では、水平な円盤状の遊星ギア上に、マイクロチップが水平に設置される。遊星ギアは、一の主軸を中心として自転しながら、他の主軸を中心として公転する。これにより、マイクロチップには、遠心方向が適宜切り替えられつつ、遠心力が付与される。マイクロチップの遠心処理が行われたのち、マイクロチップは所定位置に停止されて、光源からマイクロチップの吸光光度部に光が入射される。検出器は、マイクロチップを透過する光を受光すると、その受光量に基づいて検査結果を算出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−8875号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の検査装置では、鉛直方向に延びる回転軸を中心にして、遊星ギア上に設置されたマイクロチップが水平に公転する。そのため、検査装置は、遊星ギアを回転させるためのスペースとして、回転軸の周りで水平方向に広がる円形領域を備える必要があった。その結果、検査装置の筺体が水平方向に大きくなり、ひいては検査装置の設置面積が大きくなるおそれがあった。
【0006】
本発明は、上述した課題を解決するためになされたものであり、設置面積を低減可能な検査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る検査装置は、検査対象である液体が移動可能な液体回路が形成された検査対象受体を回転させて、遠心力によって前記液体を前記液体回路内で移動させる検査装置であって、装置設置面と直交する方向に対して交差する方向に延び、軸線周りに回転可能な主軸と、前記主軸を前記軸線周りに回転させる駆動部と、前記主軸から前記主軸の軸線方向と交差する方向に延出し、前記主軸の回転に伴って回転する延出部と、前記延出部における前記主軸から離間した位置に設けられ、前記検査対象受体を保持する受体保持部とを備えている。
【0008】
これによれば、主軸が装置設置面と直交する方向に対して交差する方向に延びている。主軸が軸線周りに回転すると、主軸から主軸の軸線方向と交差する方向に延出した延出部も回転する。延出部には、主軸から離間した位置で検査対象受体を保持する受体保持部が設けられている。主軸の回転によって、主軸と直交する方向に作用する遠心力が、検査対象受体に付与される。したがって、検査装置の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置の設置面積を低減できる。
【0009】
上記態様に係る検査装置において、前記延出部は、前記主軸と接続される部位を支点として、前記主軸の軸線方向と直交する方向を中心に揺動自在であり、前記延出部を揺動させることによって、前記延出部の前記主軸からの延出角度を調整する角度調整手段を備えてもよい。この場合、延出部の主軸からの延出角度を調整することで、主軸の回転速度を一定にしつつ、検査対象受体に付与される遠心力の大きさを調整できる。
【0010】
上記態様に係る検査装置において、前記角度調整手段は、前記検査対象受体が前記受体保持部に保持される前に、前記受体保持部が前記液体回路の形成方向を水平に維持しながら前記検査対象受体を保持可能な第一状態となるように、前記延出角度を第一角度に調整してもよい。この場合、検査者は検査対象受体を水平に維持しつつ、受体保持部に保持させることができる。
【0011】
上記態様に係る検査装置において、前記角度調整手段は、前記検査対象受体に前記遠心力が付与された後に、前記受体保持部が前記液体回路の形成方向を垂直に維持しながら前記検査対象受体を保持可能な第二状態となるように、前記延出角度を第二角度に調整してもよい。この場合、検査対象受体の遠心処理が終了したのちに、検査対象受体に付与される外力の方向が変化することを抑制できる。
【0012】
上記態様に係る検査装置において、前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第三角度は、0°よりも大、且つ、45°以下であってもよい。この場合、検査装置の設置面積を一層低減できる。
【0013】
上記態様に係る検査装置において、前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第四角度は、45°であり、前記主軸のうちで前記延出部が接続される部位から前記装置設置面に向けて延びる部分と、前記延出部の延出方向とがなす第五角度は、45°であってもよい。この場合、検査装置の設置面積を、最も効率的に低減できる。また、検査者は検査対象受体を水平に保持しつつ、受体保持部に保持させることができる。さらに、検査対象受体の遠心処理が終了したのちに、検査対象受体に付与される外力の方向が変化することを抑制できる。
【図面の簡単な説明】
【0014】
【図1】第一実施形態に係る、検査装置1の平面図である。
【図2】検査装置1の左側面図である。
【図3】図2に示す主軸4および延出体10の連結部分を拡大した図である。
【図4】図3に示す状態から主軸4を180°回転させた場合の、主軸4および延出体10の連結部分を拡大した左側面図である。
【図5】図2に示す状態から主軸4を180°回転させた場合の、検査装置1の左側面図である。
【図6】遠心処理前の検査チップ40の平面図である。
【図7】検査装置1で実行されるメイン処理のフローチャートである。
【図8】遠心処理後の検査チップ40の平面図である。
【図9】第二実施形態に係る、検査装置100の左側面図である。
【図10】図9に示す状態から主軸4を180°回転させた場合の、検査装置100の左側面図である。
【発明を実施するための形態】
【0015】
本発明を具体化した実施の形態について、図面を参照して説明する。参照する図面は、本発明が採用しうる技術的特徴を説明するために用いられるものであり、単なる説明例である。
【0016】
第一実施形態に係る検査装置1について、図1〜図8を参照して説明する。本実施形態では、検査対象である液体(以下、検体と呼ぶ。)および検体に混合される液体(以下、試薬と呼ぶ。)を収容可能な検査チップ40を用いて、検査装置1で検査が行われる場合を例示する。
【0017】
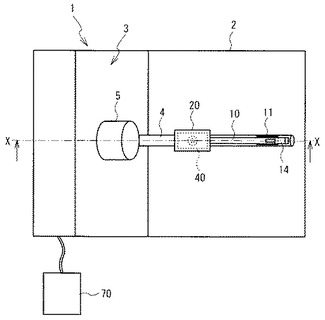
図1〜図5を参照して、検査装置1の構造について説明する。以下の説明では、図1の上方、下方、右方、左方を、それぞれ、検査装置1の右方、左方、前方、後方とする。図2の上方、下方、右方、左方を、それぞれ、検査装置1の上方、下方、前方、後方とする。なお、理解を容易にするために、図2では、基部2のみを図1に示すX−X線における矢視方向の断面図で示している。図3、4では、主軸4のうちで軸ピン12近傍を破断図で示している。図4、5では、それぞれ主軸4を図3、2に示す状態から180°回転させた状態を示している。
【0018】
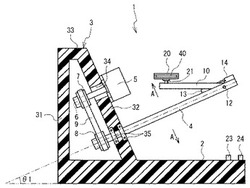
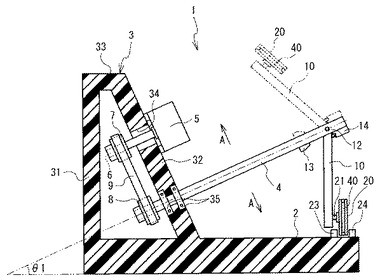
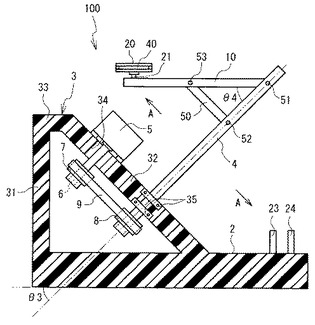
図1および図2に示すように、検査装置1は、水平な設置面に載置される基部2を備える。基部2は、検査装置1の前後方向を長手方向とする、平面視長方形状の板状体である。基部2の上面側には、中空状の箱状体である支持部3が設けられている。支持部3は、後壁31、前壁32、天壁33、および一対の側壁(図示外)で形成されている。後壁31は、基部2の後端縁に沿って、上方へ垂直に延びる壁部である。前壁32は、基部2における前後方向略中心位置のやや後側から、後側上方に傾斜して延びる壁部である。天壁33は、後壁31の上端縁と前壁32の上端縁とに亘って、水平に延びる壁部である。
【0019】
前壁32の前面側には、モータ5が設けられている。モータ5は、軸線周りに回転可能な軸6を備える。軸6は、前壁32に向かって突出し、且つ、前壁32に形成されている孔部34を貫通している。軸6の先端部には、プーリ7が軸6に対して同軸に固定されている。軸6の先端部(言い換えると、プーリ7)は、支持部3の内部で回転可能に配置されている。
【0020】
基部2の上方には、軸線周りに回転可能な主軸4が設けられている。主軸4は、検査装置1の設置面と直交する方向(具体的には、上下方向)に対して交差する方向に延びる、細長の円柱体である。具体的には、主軸4は、支持部3の内部から前壁32を貫通して前側上方に延びている。主軸4は、前壁32に設けられた支持金具35によって回転可能に支持されている。主軸4の後端部には、プーリ8が主軸4に対して同軸に固定されている。主軸4の後端部(言い換えると、プーリ8)は、支持部3の内部で回転可能に配置されている。プーリ7とプーリ8との間には、ベルト9が掛け渡されている。
【0021】
主軸4の軸線方向と設置面の延びる方向(具体的には、水平方向)とがなす角度のうちで小さいほうの角度が、角度θ1である。言い換えると、角度θ1は、左側面視で主軸4の軸線方向が水平方向となるまで時計回り方向に回転させた場合の角度である。本実施形態では、角度θ1が30°となるように、主軸4の傾きが支持金具35によって規定されている。
【0022】
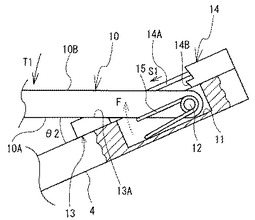
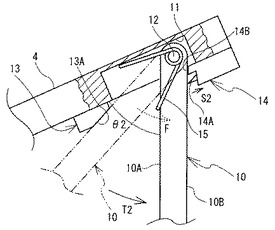
図1〜図3に示すように、主軸4の前端側には、主軸4の軸線方向と直交する方向(図3では右下方向)に切り欠かれた凹部である連結穴11が形成されている。連結穴11には、延出体10の一端側(図3では右端側)が挿入されている。延出体10は、主軸4から主軸4の軸線方向と交差する方向に延出する、細長の角柱体である。以下の説明では、延出体10の側面のうち、主軸4に対向する側面(図3では下面)を内側面10Aと呼び、内側面10Aとは反対側の側面(図3では上面)を外側面10Bと呼ぶ。
【0023】
連結穴11の内部には、連結穴11の形成方向と直交する方向(図1では左右方向)に延びる軸ピン12が設けられている。軸ピン12は、連結穴11に挿入されている延出体10の一端部を貫通している。つまり、延出体10は、軸ピン12を支点として揺動可能に支持され、且つ、主軸4の回転に伴って回転可能に支持されている。なお、主軸4の回転時に延出体10が基部2に接触しないように、主軸4から延出体10の先端までの距離(言い換えると、延出体10の全長)は、基部2から軸ピン12までの距離よりも小さい。
【0024】
軸ピン12には、延出体10と隣接するように、トーションバネ15のコイル部が装着されている。トーションバネ15は、それぞれ先端部が屈曲した2つのアームを有する。連結穴11の内部では、一方のアームの先端部が連結穴11の底面に固定され、且つ、他方のアームの先端部が延出体10の内側面10Aに固定されている。トーションバネ15は、外力が加えられていない状態でアーム角度が90°以上となるように設定されている。一方、トーションバネ15は、アーム角度が90°未満となるように加圧された状態で、連結穴11の内部に取り付けられている。したがって、延出体10は、トーションバネ15の反発力が内側面10Aに常に付与される。言い換えると、トーションバネ15は、外側面10Bと対向する方向(図3に示す矢印Fの方向)に、延出体10を常に付勢する。
【0025】
延出体10の主軸4に対する角度(すなわち、延出体10の延出角度)が、角度θ2である。言い換えると、角度θ2は、主軸4の軸線方向と延出体10とがなす角のうち、内側面10A側の角度である。本実施形態では、延出体10が主軸4に対して回転可能な角度(つまり、角度θ2の範囲)が、後述の第一角度設定部13Aおよび第二角度設定部14Bによって規定されている。
【0026】
主軸4において連結穴11に隣接した位置には、ブロック部13およびソレノイド14が延出体10を前後方向に挟んで設けられている。詳細には、ブロック部13は、延出体10の内側面10Aに対向するように、連結穴11の後端縁に沿って設けられている。ソレノイド14は、延出体10の外側面10Bに対向するように、連結穴11の前端縁に沿って設けられている。
【0027】
ブロック部13は、主軸4の側面に軸線方向に沿って延びる略直方体状の固形物であり、第一角度設定部13Aが形成されている。第一角度設定部13Aは、延出体10の内側面10Aと対向する、ブロック部13に形成された壁面である。第一角度設定部13Aは、延出体10が内側面10A側(図3に示す矢印T1の方向)に回転する場合の最大回転角度(つまり、角度θ2の下限角度)を規定する。
【0028】
ソレノイド14は、押圧ピン14Aおよび第二角度設定部14Bを備える。押圧ピン14Aは、延出体10の外側面10Bに向けて突出し、且つ、ソレノイド14のオン・オフに応じて主軸4の軸線方向と平行に進退可能である。押圧ピン14Aの突出端には、外側面10Bを効率的かつスムーズに押圧できるように、略水平な傾斜面が形成されている。第二角度設定部14Bは、押圧ピン14Aよりも主軸4側に設けられた、外側面10Bと対向する壁面である。第二角度設定部14Bは、延出体10が外側面10B側(図4に示す矢印T2の方向)に回転する場合の最大回転角度(つまり、角度θ2の上限角度)を規定する。
【0029】
延出体10の他端側(図3では左端側)には、延出体10の延設方向と直交する方向(図3では上方向)に突出する軸21が設けられている。軸21の先端部は、平面視でチップホルダ20の中央部に固定されている。軸21は、チップホルダ20の平面が延出体10の延設方向と平行となるように、チップホルダ20を支持する。チップホルダ20は、回転中心となる主軸4から離間した位置で検査チップ40を保持する。
【0030】
チップホルダ20は、一例として、底板と上板と側壁とで外形が形成された箱状体である。詳細には、チップホルダ20は、平面視長方形に形成された検査チップ40を内部に収納できるように、検査チップ40より一回り大きい平面視長方形に形成された箱状の部材である。検査者は、主軸4から離間する方向に向けて(言い換えると、延出体10の延設方向に向けて)、検査チップ40をチップホルダ20に装着可能である。
【0031】
上記の構成では、モータ5の軸6が回転すると、軸6に固定されているプーリ7が回転する。プーリ7の回転は、ベルト9によりプーリ8に伝えられて、プーリ8が回転する。ひいては、プーリ8が固定されている主軸4が回転する。主軸4の回転に伴って、主軸4に軸ピン12を介して連結されている延出体10が回転する。延出体10の回転によって、軸21に固定されているチップホルダ20も回転する。これにより、主軸4の軸線方向と直交し、且つ、主軸4から離間する方向(図2に示す矢印Aの方向)に生じる遠心力が、検査チップ40に付与される。
【0032】
本実施形態では、主軸4は、正面視で(つまり、図1に示す検査装置1を右側から見た状態で)時計回り方向に360°回転可能である。主軸4の回転時に延出体10が主軸4の直上に至った場合、延出体10の高さ(つまり、延出体10と設置面との上下方向長さ)が最大となる(図1〜図3参照)。このときの主軸4の回転角度を、0°とする。一方、主軸4の回転時に延出体10が主軸4の直下に至った場合、延出体10の高さが最小となる(図4、図5参照)。このときの主軸4の回転角度を、180°とする。
【0033】
ソレノイド14がオン状態である場合は、図1〜図3に示すように、押圧ピン14Aが後側下方(図3に示す矢印S1の方向)に進出して、外側面10Bを押圧する。これにより、延出体10は、トーションバネ15の付勢力に抗って内側面10Aと対向する方向(図3に示す矢印T1の方向)に回転する。このとき、内側面10Aが第一角度設定部13Aに当接すると、延出体10の回転が規制されるとともに、角度θ2が下限角度で保持される。つまり、内側面10Aと第一角度設定部13Aとが接触する位置で、角度θ2の下限角度が規定される。
【0034】
本実施形態では、角度θ2の下限角度が角度θ1と等しくなるように(つまり、30°となるように)、第一角度設定部13Aの形成角度が調整されている。これにより、チップホルダ20が検査チップ40を水平に保持する状態(以下、第一状態と呼ぶ。)を実現できる。すなわち、ソレノイド14がオン状態である場合に、主軸4が回転角度0°まで回転すると、延出体10が図3に示す状態となる。この状態では、第一角度設定部13Aの延設方向は水平になり、第一角度設定部13Aに当接する延出体10の延設方向も水平になる。ひいては、図2に示すように、検査チップ40がチップホルダ20によって水平に保持されるため、上記の第一状態が実現される。
【0035】
ソレノイド14がオフ状態である場合は、図4に示すように、押圧ピン14Aが前側上方(図3に示す矢印S2の方向)に退入する。これにより、延出体10は、トーションバネ15の付勢力によって、外側面10Bと対向する方向(図4に示す矢印T2の方向)に回転する。このとき外側面10Bが第二角度設定部14Bに当接すると、延出体10の回転が規制されるとともに、角度θ2が上限角度で保持される。つまり、外側面10Bと第二角度設定部14Bとが接触する位置で、角度θ2の上限角度が規定される。
【0036】
本実施形態では、角度θ2の上限角度が90°から角度θ1を減じた角度(つまり、60°となるように)、第二角度設定部14Bの形成角度が調整されている。これにより、チップホルダ20が検査チップ40を垂直に保持する状態(以下、第二状態と呼ぶ。)を実現できる。すなわち、ソレノイド14がオフ状態である場合に、主軸4が回転角度180°まで回転すると、延出体10が図4に示す状態となる。この状態では、第二角度設定部14Bの延設方向は垂直になり、第二角度設定部14Bに当接する延出体10の延設方向も垂直になる。ひいては、図5に示すように、検査チップ40がチップホルダ20によって垂直に保持されるため、上記の第二状態が実現される。
【0037】
基部2上の所定位置には、前後方向に対向する光源23および検出器24が設けられている。チップホルダ20が第二状態になった場合、光源23および検出器24は検査チップ40を挟んで前後方向に対向する。光源23は、検査チップ40内で生成された試薬と検体との混合物(つまり、反応生成物)に、検査チップ40に対して後側から光を照射する。検出器24は、反応生成物を透過した光を、検査チップ40に対して前側で検出する。なお、光源23および検出器24を検査チップ40に対して同一方向に設けることで、反応生成物で反射する光を検出して各種測定を行ってもよい。
【0038】
図1に示すように、検査装置1は、基部2の外部に設けられた制御装置70に接続されている。制御装置70は、図示外のCPU、RAM、ROM等を内蔵して、検査装置1の各種動作(例えば、主軸4の回転や、ソレノイド14のオン・オフなど)を制御する。また、制御装置70は、光源23から光を照射させて、検出器24で受光量を検出することで、各種測定を実行できる。なお、制御装置70には、検査者が検査装置1の各種動作を指示するための操作部(図示外)が設けられている。
【0039】
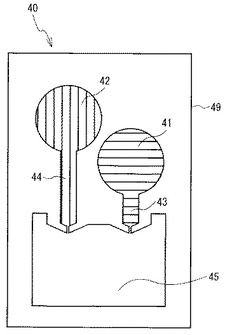
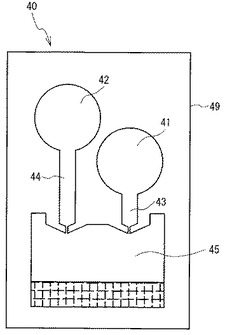
図6を参照して、検査チップ40の構造について説明する。以下では、図6の上方、下方、右方、左方を、それぞれ、検査チップ40の前方、後方、右方、左方として説明する。図6の紙面手前側および紙面奥側を、それぞれ、検査チップ40の上方および下方として説明する。
【0040】
本実施形態では、検査装置1で検査チップ40を使用する場合、検査者が検査チップ40を第一状態にあるチップホルダ20に水平に装着する。このとき、検査者は、検査チップ40の前後方向が延出体10の延設方向と一致するように、且つ、検査チップ40の前側が主軸4と対向するように、検査チップ40をチップホルダ20に装着する(図1参照)。これにより、検査チップ40の前後方向と、主軸4の回転時に生じる遠心力の方向(図2に示す矢印Aの方向)とが、回転中心となる主軸4からみて同一側に延びる。よって、主軸4の回転時に生じる遠心力を、検査チップ40の前側から後方に作用させることができる。
【0041】
検査チップ40は、前後方向を長手方向とする、平面視長方形状の薄手の箱状体である。検査チップ40は、所定の厚みを有する合成樹脂の板材49によって外形が形成されている。検体投入口41および試薬投入口42が、板材49に平面視円形の窪みとして形成されている。図示しないが、検査チップ40の上面は、透明の合成樹脂製の蓋(図示外)で覆われている。この蓋には、検体投入口41および試薬投入口42と対応する位置のみに、それぞれ開口が形成されている。つまり、検査チップ40の上面のうちで、検体投入口41および試薬投入口42のみが上方に開口している。
【0042】
検体投入口41は、検査チップ40内に検体を供給するために、検査者が検体を投入する部位である。試薬投入口42は、検査チップ40内に試薬を供給するために、検査者が試薬を投入する部位である。従って、検査者は検査チップ40内に検体および試薬を投入して、これらの検体および試薬を混合させることができる。
【0043】
検体供給路43および試薬供給路44が、板材49に溝状に形成されている。検体供給路43は、検体投入口41から後方に延びる、検体の流路である。試薬供給路44は、試薬投入口42から後方に延びる、試薬の流路である。つまり、検体供給路43および試薬供給路44は、検査チップ40の前後方向(言い換えると、長手方向)に延設されている。検体供給路43および試薬供給路44の末端部(つまり、後端部)には、幅が狭くなった出口が各々設けられている。
【0044】
検体供給路43および試薬供給路44の後方側(図6における下方側)には、混合槽45が形成されている。混合槽45は、板材49に対する窪みとして形成された、平面視で検体供給路43および試薬供給路44から後方に凹む部位である。混合槽45では、検体供給路43から供給された検体と、試薬供給路44から供給された試薬とが混合されて、反応生成物が生成される。
【0045】
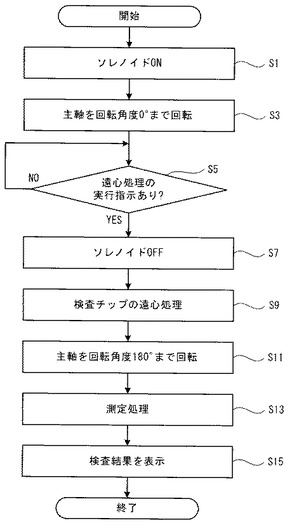
図7を参照して、検査装置1および検査チップ40を用いた検査方法について説明する。本実施形態では、検査者は、検査装置1の電源をオンにする前に、あらかじめ検査チップ40内に検体および試薬を収容する。具体的には、検査者は、検体投入口41に検体を滴下し、試薬投入口42に試薬を滴下する。検査者は、検査チップ40内に検体および試薬を収容すると、検査装置1の電源がオンにセットする。検査装置1の電源がオンにセットされると、制御装置70のCPUがROMに記憶されている制御プログラムに基づいて、図7に示すメイン処理を実行する。
【0046】
図7に示すように、電源がオンにセットされた検査装置1では、まずソレノイド14がオンにセットされる(S1)。これにより、ソレノイド14の押圧ピン14Aが進出して、延出体10が内側面10A側に回転し、且つ、角度θ2が下限角度で固定される(図3参照)。さらに、主軸4が回転角度0°まで回転される(S3)。これにより、図2に示すように、検査チップ40がチップホルダ20によって水平に保持される。つまり、ステップS1〜S3によって、チップホルダ20が第一状態になる。
【0047】
ステップS3の実行後、遠心処理の実行指示があるか否かが判断される(S5)。例えば、検査者が制御装置70の操作部(図示外)を使用して遠心処理の実行指示を入力した場合に、遠心処理の実行指示ありと判断される(S5:YES)。遠心処理の実行指示がない場合(S5:NO)、処理はステップS5に戻る。つまり、遠心処理の実行指示があるまで、チップホルダ20が第一状態で維持される。
【0048】
検査者は、遠心処理の実行指示を入力する前に、検体および試薬が収容された検査チップ40をチップホルダ20に装着する。このとき、チップホルダ20は第一状態であるため、検査者は検査チップ40を水平に装着することができる。このとき、検査チップ40内では、検体供給路43および試薬供給路44の形成方向が水平となる。よって、検査チップ40がチップホルダ20に装着されるときに、検査チップ40内で検体および試薬が想定外の流路に流出すること(例えば、検体および試薬が混合槽45以外の流路に流出すること)を抑制できる。
【0049】
検査者は、検査チップ40をチップホルダ20に装着したのち、遠心処理の実行指示を入力する(S5:YES)。この場合、ソレノイド14がオフにセットされる(S7)。これにより、ソレノイド14の押圧ピン14Aが退入して、延出体10が外側面10B側に回転し、且つ、角度θ2が上限角度で固定される(図4参照)。角度θ2が上限角度で固定された状態のもと、検査チップ40の遠心処理が実行される(S9)。すなわち、検査チップ40に所定の遠心力が付与されるように、主軸4が時計回り方向に所定時間回転される。
【0050】
図5に示すように、検査チップ40の遠心処理(S9)では、主軸4と直交する方向(矢印Aの方向)に作用する遠心力が、検査チップ40に対して付与される。つまり、検査チップ40では、遠心力が前側から後方に向けて作用する。これにより、図8に示すように、検体投入口41から投入された検体は、検体供給路43を経由して混合槽45に流出する。試薬投入口42から投入された試薬は、試薬供給路44を経由して混合槽45に流出する。混合槽45では、検体供給路43から供給された検体と試薬供給路44から供給された試薬とが混合されて、反応生成物が生成および貯留される。
【0051】
本実施形態では、角度θ2が上限角度で固定された状態で、検査チップ40の遠心処理が実行される(S7〜S9)。この状態では、角度θ2が下限角度で固定された状態と比較して、検査チップ40が回転中心(つまり、主軸4)から大きく離間した位置で保持される。よって、検査チップ40の遠心処理時により大きな遠心力が付与されるため、遠心処理を効率的に行うことができる。つまり、角度θ2を調整することで、主軸4の回転速度を一定にしつつ、検査チップ40に付与される遠心力の大きさを調整できる。
【0052】
図7に示すように、ステップS9の実行後、主軸4が回転角度180°まで回転される(S11)。これにより、図5に示すように、検査チップ40がチップホルダ20によって垂直に保持される。つまり、遠心処理が実行された直後に、ステップS11によってチップホルダ20が第二状態になる。このとき、検査チップ40内では、検体供給路43および試薬供給路44の形成方向が垂直となる。さらに、検査チップ40が光源23および検出器24に挟まれた所定位置(つまり、適正な検査位置)まで移動している。
【0053】
これにより、遠心処理の実行中は検査チップ40の後側に向けた遠心力が付与され、遠心処理の終了後は検査チップ40の後側に向けた重力が付与される(S9〜S11)。つまり、遠心処理が終了しても、検査チップ40に付与される外力の方向に変化がない。したがって、遠心処理の終了後に、検査チップ40内で生成された反応生成物が想定外の流路に流出すること(例えば、反応生成物が混合槽45から流出すること)を抑制できる。
【0054】
ステップS11の実行後、光源23から検査チップ40に対して光が照射される。検出器24で検査チップ40を透過した光が検出されることによって、検査結果が測定される(S13)。最後に、ステップS13で測定された検査結果が、制御装置70の画面(図示外)に表示される(S15)。
【0055】
以上説明したように、第一実施形態に係る検査装置1によれば、主軸4が設置面から30°上方に傾斜しているため、主軸4の軸線方向は垂直方向に対して60°傾斜している。これにより、主軸4の回転に伴って回転する延出体10も、水平方向に対して60°傾斜した方向に回転する。そのため、検査装置1は、延出体10を回転させるためのスペースとして、主軸4の周りで水平方向に確保すべき領域を小さくすることができる。その結果、検査装置1の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置1の設置面積を低減できる。
【0056】
さらに、検査装置1では、ソレノイド14のオン・オフによって、延出体10の延出角度を調整することができる。詳細には、ソレノイド14がオンである場合、延出体10が下限角度まで回転して、チップホルダ20が第一状態に保持される。この場合、検査者は検査チップ40を水平に維持しつつ、チップホルダ20に保持させることができる。また、ソレノイド14がオフである場合、延出体10が上限角度まで回転して、チップホルダ20が第二状態に保持される。この場合、検査チップ40の遠心処理が終了したのちに、検査チップ40に付与される外力の方向が変化することを抑制できる。
【0057】
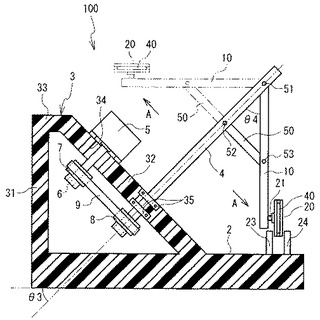
第二実施形態に係る検査装置100について、図9および図10を参照して説明する。以下の説明では、第一実施形態に係る検査装置1と同一の構成には同一符号を付し、検査装置1と異なる点のみを説明する。
【0058】
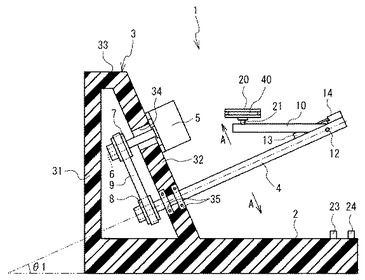
図9に示すように、検査装置100は、先述の検査装置1と比較して、主軸4の延設角度が異なる。詳細には、角度θ3は、先述の角度θ1と同様に、主軸4の軸線方向と設置面の延びる方向(具体的には、水平方向)とがなす角度のうちで小さいほうの角度である。ただし、本実施形態では、角度θ3が45°となるように、主軸4の傾きが支持金具35によって規定されている。
【0059】
さらに、検査装置100は、先述の検査装置1とは異なり、延出体10の延出角度が固定されている。詳細には、主軸4の前端側では、延出体10の一端側(図9では右端側)が主軸4に対して固定ピン51で固定されている。さらに、主軸4と延出体10との間に、細長板状の連結体50が架け渡されている。連結体50の一端側(図9では左上側)は、延出体10における延設方向の略中央部に、固定ピン53で固定されている。連結体50の他端側(図9では右下側)は、連結体50が主軸4と直交する方向に延びるように、主軸4における固定ピン51よりも後方側に固定ピン52で固定されている。
【0060】
角度θ4は、先述の角度θ2と同様に、延出体10の延出角度である。ただし、本実施形態では、角度θ4が45°となるように、延出体10の傾きが連結体50によって規定されている。なお、図示しないが、検査装置100は、先述の検査装置1と同様に制御装置70(図1参照)を備える。
【0061】
検査装置100および検査チップ40を用いた検査方法は、第一実施形態と同様である。検査装置100の電源がオンにセットされると、制御装置70のCPUがROMに記憶されている制御プログラムに基づいて、図7に示すメイン処理を実行する。ただし、検査装置100では、ステップS1およびステップS7が省略されたメイン処理が実行される。
【0062】
すなわち、電源がオンにセットされた検査装置100では、まず主軸4が回転角度0°まで回転される(S3)。本実施形態では、角度θ3、θ4がともに45°であるため、主軸4が回転角度0°まで回転されると、検査チップ40がチップホルダ20によって水平に保持される(図9参照)。つまり、ステップS3によって、チップホルダ20が第一状態になる。
【0063】
検査者が検査チップ40をチップホルダ20に装着したのち、遠心処理の実行指示を入力すると(S5:YES)、図10に示すように検査チップ40の遠心処理が実行される(S9)。ステップS9の実行後、主軸4が回転角度180°まで回転される(S11)。本実施形態では、角度θ4が90°から角度θ3を減じた角度(つまり、45°)であるため、主軸4が回転角度180°まで回転されると、検査チップ40がチップホルダ20によって垂直に保持される(図10参照)。つまり、遠心処理が実行された直後に、ステップS11によってチップホルダ20が第二状態になる。その後、検査結果が測定される(S13)。最後に、ステップS13で測定された検査結果が、制御装置70の画面(図示外)に表示される(S15)。
【0064】
以上説明したように、第二実施形態に係る検査装置100によれば、主軸4が設置面から45°上方に傾斜しているため、主軸4の軸線方向は垂直方向に対して45°傾斜している。これにより、主軸4の回転に伴って回転する延出体10も、水平方向に対して45°傾斜した方向に回転する。そのため、検査装置100は、延出体10を回転させるためのスペースとして、主軸4の周りで水平方向に確保すべき領域を小さくすることができる。その結果、検査装置100の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置100の設置面積を低減できる。
【0065】
さらに、検査装置100では、主軸4の回転角度を0°に調整するだけで、チップホルダ20が第一状態に保持される。この場合、検査者は検査チップ40を水平に維持しつつ、チップホルダ20に保持させることができる。また、主軸4の回転角度を180°に調整するだけで、チップホルダ20が第二状態に保持される。この場合、検査チップ40の遠心処理が終了したのちに、検査チップ40に付与される外力の方向が変化することを抑制できる。
【0066】
上記実施形態において、検体供給路43および試薬供給路44が、本発明の「液体回路」に相当する。検査チップ40が、本発明の「検査対象受体」に相当する。モータ5が、本発明の「駆動部」に相当する。延出体10が、本発明の「延出部」に相当する。チップホルダ20が、本発明の「受体保持部」に相当する。ソレノイド14が、本発明の「角度調整手段」に相当する。角度θ2が、本発明の「延出角度」に相当する。角度θ2の下限角度が、本発明の「第一角度」に相当する。角度θ2の上限角度が、本発明の「第二角度」に相当する。角度θ1が、本発明の「第三角度」に相当する。角度θ3が、本発明の「第四角度」に相当する。角度θ5が、本発明の「第五角度」に相当する。
【0067】
なお、本発明は、上記実施形態に限定されるものではなく、各種の変形が可能なことはいうまでもない。例えば、主軸4の軸長、傾き、軸径などは、適宜変更してもよい。ただし、主軸4の傾き(上記実施形態絵では、角度θ1、θ3)が大きいほど(例えば、45°よりも大)、延出体10を回転させるために主軸4の周りで水平方向に確保すべき領域が大きくなる。そのため、検査装置の設置面積を一層低減するために、主軸4の傾きは0°よりも大、且つ、45°以下であることが好適である。
【0068】
一方、主軸4の傾きが小さいほど、主軸4の先端側に付与される加重が大きくなる。主軸4の傾きが小さすぎる場合、遠心処理時に主軸4の湾曲が生じてしまい、例えば検査チップ40の振動などを生じるおそれがある。遠心処理時における主軸4の湾曲を抑制するためには、主軸4の傾きは30°以上であることが好適である。
【0069】
また、主軸4の傾きが小さいほど、検査チップ40に付与される遠心力は小さくなる。主軸4の傾きが小さすぎる場合、検査チップ40に付与される遠心力の大きさを確保するために、主軸4を回転させているモータ5の回転数を上げる必要がある。そうすると、例えばモータ5の大型化によって設置面積が拡大したり、モータ5の製造コストが上昇したり、遠心処理時に生じる振動が増大したりするおそれがある。検査チップ40に適切な遠心力を加えるためにも、主軸4の傾きは30°以上であることが好適である。
【0070】
さらに、主軸4の先端側に付与される加重および検査チップ40に付与される遠心力と、検査装置の設置面積とのバランスを考慮すると、主軸4の傾きが45°であることがより好適である。
【0071】
第一実施形態では、ソレノイド14によって延出体10の延出角度が調整されているが、他の角度調整部材(例えば、ステッピングモータなど)によって調整されてもよい。また、延出体10の延出角度が30°または60°に調整されているが、他の角度(例えば、45°など)に調整されてもよい。また、延出体10の延出角度が遠心処理の実行前に調整されているが、他のタイミングで調整されてもよい。例えば、遠心処理の実行中に延出体10の延出角度を調整した場合、主軸4の回転速度を変えることなく、且つ、主軸4の回転を止めることなく、遠心力の大きさを調整することができる。
【0072】
上記実施形態では、主軸4に1つの延出体10が連結されているが、主軸4に連結される延出体10の数量は適宜変更可能である。例えば、主軸4から相対する方向に延びるように2つの延出体10を設けてもよい。この場合、各々の延出体10に設けられたチップホルダ20にそれぞれ検査チップ40を保持させることで、2つの検査チップ40について同時に遠心処理を行うことができる。
【0073】
また、延出体10の全長、大きさ、形状なども適宜変更可能である。例えば、延出体10の全長をより大きくすることで、主軸4に対してより大きく離間した位置で、チップホルダ20に検査チップ40を保持させることが可能となる。この場合、検査チップ40の遠心処理時に付与される遠心力をより大きくすることができる。また、主軸4の全周側に延びるテーパ状の板状部材などで、延出体10を形成してもよい。
【符号の説明】
【0074】
1 検査装置
4 主軸
5 モータ
10 延出体
13 ブロック部
13A 第一角度設定部
14 ソレノイド
14A 押圧ピン
14B 第二角度設定部
15 トーションバネ
20 チップホルダ
23 光源
24 検出器
40 検査チップ
41 検体投入口
42 試薬投入口
43 検体供給路
44 試薬供給路
45 混合槽
70 制御装置
100 検査装置
【技術分野】
【0001】
本発明は、化学的、医学的、生物学的な検査を行うための検査装置に関する。詳細には、検査対象受体を回転軸から離間した位置に保持し、検査対象受体を回転させて遠心力を付与する検査装置に関する。
【背景技術】
【0002】
従来、マイクロチップ又は検査チップと呼ばれる検査対象受体を使用して、生体物質及び化学物質等を検査する検査装置が提案されている(例えば、特許文献1参照)。このような検査装置を使用することで、DNA(Deoxyribo Nucleic Acid)、酵素、抗原、抗体、タンパク質、ウィルス、細胞などを検知したり、定量したりすることができる。
【0003】
特許文献1に開示の検査装置では、水平な円盤状の遊星ギア上に、マイクロチップが水平に設置される。遊星ギアは、一の主軸を中心として自転しながら、他の主軸を中心として公転する。これにより、マイクロチップには、遠心方向が適宜切り替えられつつ、遠心力が付与される。マイクロチップの遠心処理が行われたのち、マイクロチップは所定位置に停止されて、光源からマイクロチップの吸光光度部に光が入射される。検出器は、マイクロチップを透過する光を受光すると、その受光量に基づいて検査結果を算出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−8875号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の検査装置では、鉛直方向に延びる回転軸を中心にして、遊星ギア上に設置されたマイクロチップが水平に公転する。そのため、検査装置は、遊星ギアを回転させるためのスペースとして、回転軸の周りで水平方向に広がる円形領域を備える必要があった。その結果、検査装置の筺体が水平方向に大きくなり、ひいては検査装置の設置面積が大きくなるおそれがあった。
【0006】
本発明は、上述した課題を解決するためになされたものであり、設置面積を低減可能な検査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る検査装置は、検査対象である液体が移動可能な液体回路が形成された検査対象受体を回転させて、遠心力によって前記液体を前記液体回路内で移動させる検査装置であって、装置設置面と直交する方向に対して交差する方向に延び、軸線周りに回転可能な主軸と、前記主軸を前記軸線周りに回転させる駆動部と、前記主軸から前記主軸の軸線方向と交差する方向に延出し、前記主軸の回転に伴って回転する延出部と、前記延出部における前記主軸から離間した位置に設けられ、前記検査対象受体を保持する受体保持部とを備えている。
【0008】
これによれば、主軸が装置設置面と直交する方向に対して交差する方向に延びている。主軸が軸線周りに回転すると、主軸から主軸の軸線方向と交差する方向に延出した延出部も回転する。延出部には、主軸から離間した位置で検査対象受体を保持する受体保持部が設けられている。主軸の回転によって、主軸と直交する方向に作用する遠心力が、検査対象受体に付与される。したがって、検査装置の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置の設置面積を低減できる。
【0009】
上記態様に係る検査装置において、前記延出部は、前記主軸と接続される部位を支点として、前記主軸の軸線方向と直交する方向を中心に揺動自在であり、前記延出部を揺動させることによって、前記延出部の前記主軸からの延出角度を調整する角度調整手段を備えてもよい。この場合、延出部の主軸からの延出角度を調整することで、主軸の回転速度を一定にしつつ、検査対象受体に付与される遠心力の大きさを調整できる。
【0010】
上記態様に係る検査装置において、前記角度調整手段は、前記検査対象受体が前記受体保持部に保持される前に、前記受体保持部が前記液体回路の形成方向を水平に維持しながら前記検査対象受体を保持可能な第一状態となるように、前記延出角度を第一角度に調整してもよい。この場合、検査者は検査対象受体を水平に維持しつつ、受体保持部に保持させることができる。
【0011】
上記態様に係る検査装置において、前記角度調整手段は、前記検査対象受体に前記遠心力が付与された後に、前記受体保持部が前記液体回路の形成方向を垂直に維持しながら前記検査対象受体を保持可能な第二状態となるように、前記延出角度を第二角度に調整してもよい。この場合、検査対象受体の遠心処理が終了したのちに、検査対象受体に付与される外力の方向が変化することを抑制できる。
【0012】
上記態様に係る検査装置において、前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第三角度は、0°よりも大、且つ、45°以下であってもよい。この場合、検査装置の設置面積を一層低減できる。
【0013】
上記態様に係る検査装置において、前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第四角度は、45°であり、前記主軸のうちで前記延出部が接続される部位から前記装置設置面に向けて延びる部分と、前記延出部の延出方向とがなす第五角度は、45°であってもよい。この場合、検査装置の設置面積を、最も効率的に低減できる。また、検査者は検査対象受体を水平に保持しつつ、受体保持部に保持させることができる。さらに、検査対象受体の遠心処理が終了したのちに、検査対象受体に付与される外力の方向が変化することを抑制できる。
【図面の簡単な説明】
【0014】
【図1】第一実施形態に係る、検査装置1の平面図である。
【図2】検査装置1の左側面図である。
【図3】図2に示す主軸4および延出体10の連結部分を拡大した図である。
【図4】図3に示す状態から主軸4を180°回転させた場合の、主軸4および延出体10の連結部分を拡大した左側面図である。
【図5】図2に示す状態から主軸4を180°回転させた場合の、検査装置1の左側面図である。
【図6】遠心処理前の検査チップ40の平面図である。
【図7】検査装置1で実行されるメイン処理のフローチャートである。
【図8】遠心処理後の検査チップ40の平面図である。
【図9】第二実施形態に係る、検査装置100の左側面図である。
【図10】図9に示す状態から主軸4を180°回転させた場合の、検査装置100の左側面図である。
【発明を実施するための形態】
【0015】
本発明を具体化した実施の形態について、図面を参照して説明する。参照する図面は、本発明が採用しうる技術的特徴を説明するために用いられるものであり、単なる説明例である。
【0016】
第一実施形態に係る検査装置1について、図1〜図8を参照して説明する。本実施形態では、検査対象である液体(以下、検体と呼ぶ。)および検体に混合される液体(以下、試薬と呼ぶ。)を収容可能な検査チップ40を用いて、検査装置1で検査が行われる場合を例示する。
【0017】
図1〜図5を参照して、検査装置1の構造について説明する。以下の説明では、図1の上方、下方、右方、左方を、それぞれ、検査装置1の右方、左方、前方、後方とする。図2の上方、下方、右方、左方を、それぞれ、検査装置1の上方、下方、前方、後方とする。なお、理解を容易にするために、図2では、基部2のみを図1に示すX−X線における矢視方向の断面図で示している。図3、4では、主軸4のうちで軸ピン12近傍を破断図で示している。図4、5では、それぞれ主軸4を図3、2に示す状態から180°回転させた状態を示している。
【0018】
図1および図2に示すように、検査装置1は、水平な設置面に載置される基部2を備える。基部2は、検査装置1の前後方向を長手方向とする、平面視長方形状の板状体である。基部2の上面側には、中空状の箱状体である支持部3が設けられている。支持部3は、後壁31、前壁32、天壁33、および一対の側壁(図示外)で形成されている。後壁31は、基部2の後端縁に沿って、上方へ垂直に延びる壁部である。前壁32は、基部2における前後方向略中心位置のやや後側から、後側上方に傾斜して延びる壁部である。天壁33は、後壁31の上端縁と前壁32の上端縁とに亘って、水平に延びる壁部である。
【0019】
前壁32の前面側には、モータ5が設けられている。モータ5は、軸線周りに回転可能な軸6を備える。軸6は、前壁32に向かって突出し、且つ、前壁32に形成されている孔部34を貫通している。軸6の先端部には、プーリ7が軸6に対して同軸に固定されている。軸6の先端部(言い換えると、プーリ7)は、支持部3の内部で回転可能に配置されている。
【0020】
基部2の上方には、軸線周りに回転可能な主軸4が設けられている。主軸4は、検査装置1の設置面と直交する方向(具体的には、上下方向)に対して交差する方向に延びる、細長の円柱体である。具体的には、主軸4は、支持部3の内部から前壁32を貫通して前側上方に延びている。主軸4は、前壁32に設けられた支持金具35によって回転可能に支持されている。主軸4の後端部には、プーリ8が主軸4に対して同軸に固定されている。主軸4の後端部(言い換えると、プーリ8)は、支持部3の内部で回転可能に配置されている。プーリ7とプーリ8との間には、ベルト9が掛け渡されている。
【0021】
主軸4の軸線方向と設置面の延びる方向(具体的には、水平方向)とがなす角度のうちで小さいほうの角度が、角度θ1である。言い換えると、角度θ1は、左側面視で主軸4の軸線方向が水平方向となるまで時計回り方向に回転させた場合の角度である。本実施形態では、角度θ1が30°となるように、主軸4の傾きが支持金具35によって規定されている。
【0022】
図1〜図3に示すように、主軸4の前端側には、主軸4の軸線方向と直交する方向(図3では右下方向)に切り欠かれた凹部である連結穴11が形成されている。連結穴11には、延出体10の一端側(図3では右端側)が挿入されている。延出体10は、主軸4から主軸4の軸線方向と交差する方向に延出する、細長の角柱体である。以下の説明では、延出体10の側面のうち、主軸4に対向する側面(図3では下面)を内側面10Aと呼び、内側面10Aとは反対側の側面(図3では上面)を外側面10Bと呼ぶ。
【0023】
連結穴11の内部には、連結穴11の形成方向と直交する方向(図1では左右方向)に延びる軸ピン12が設けられている。軸ピン12は、連結穴11に挿入されている延出体10の一端部を貫通している。つまり、延出体10は、軸ピン12を支点として揺動可能に支持され、且つ、主軸4の回転に伴って回転可能に支持されている。なお、主軸4の回転時に延出体10が基部2に接触しないように、主軸4から延出体10の先端までの距離(言い換えると、延出体10の全長)は、基部2から軸ピン12までの距離よりも小さい。
【0024】
軸ピン12には、延出体10と隣接するように、トーションバネ15のコイル部が装着されている。トーションバネ15は、それぞれ先端部が屈曲した2つのアームを有する。連結穴11の内部では、一方のアームの先端部が連結穴11の底面に固定され、且つ、他方のアームの先端部が延出体10の内側面10Aに固定されている。トーションバネ15は、外力が加えられていない状態でアーム角度が90°以上となるように設定されている。一方、トーションバネ15は、アーム角度が90°未満となるように加圧された状態で、連結穴11の内部に取り付けられている。したがって、延出体10は、トーションバネ15の反発力が内側面10Aに常に付与される。言い換えると、トーションバネ15は、外側面10Bと対向する方向(図3に示す矢印Fの方向)に、延出体10を常に付勢する。
【0025】
延出体10の主軸4に対する角度(すなわち、延出体10の延出角度)が、角度θ2である。言い換えると、角度θ2は、主軸4の軸線方向と延出体10とがなす角のうち、内側面10A側の角度である。本実施形態では、延出体10が主軸4に対して回転可能な角度(つまり、角度θ2の範囲)が、後述の第一角度設定部13Aおよび第二角度設定部14Bによって規定されている。
【0026】
主軸4において連結穴11に隣接した位置には、ブロック部13およびソレノイド14が延出体10を前後方向に挟んで設けられている。詳細には、ブロック部13は、延出体10の内側面10Aに対向するように、連結穴11の後端縁に沿って設けられている。ソレノイド14は、延出体10の外側面10Bに対向するように、連結穴11の前端縁に沿って設けられている。
【0027】
ブロック部13は、主軸4の側面に軸線方向に沿って延びる略直方体状の固形物であり、第一角度設定部13Aが形成されている。第一角度設定部13Aは、延出体10の内側面10Aと対向する、ブロック部13に形成された壁面である。第一角度設定部13Aは、延出体10が内側面10A側(図3に示す矢印T1の方向)に回転する場合の最大回転角度(つまり、角度θ2の下限角度)を規定する。
【0028】
ソレノイド14は、押圧ピン14Aおよび第二角度設定部14Bを備える。押圧ピン14Aは、延出体10の外側面10Bに向けて突出し、且つ、ソレノイド14のオン・オフに応じて主軸4の軸線方向と平行に進退可能である。押圧ピン14Aの突出端には、外側面10Bを効率的かつスムーズに押圧できるように、略水平な傾斜面が形成されている。第二角度設定部14Bは、押圧ピン14Aよりも主軸4側に設けられた、外側面10Bと対向する壁面である。第二角度設定部14Bは、延出体10が外側面10B側(図4に示す矢印T2の方向)に回転する場合の最大回転角度(つまり、角度θ2の上限角度)を規定する。
【0029】
延出体10の他端側(図3では左端側)には、延出体10の延設方向と直交する方向(図3では上方向)に突出する軸21が設けられている。軸21の先端部は、平面視でチップホルダ20の中央部に固定されている。軸21は、チップホルダ20の平面が延出体10の延設方向と平行となるように、チップホルダ20を支持する。チップホルダ20は、回転中心となる主軸4から離間した位置で検査チップ40を保持する。
【0030】
チップホルダ20は、一例として、底板と上板と側壁とで外形が形成された箱状体である。詳細には、チップホルダ20は、平面視長方形に形成された検査チップ40を内部に収納できるように、検査チップ40より一回り大きい平面視長方形に形成された箱状の部材である。検査者は、主軸4から離間する方向に向けて(言い換えると、延出体10の延設方向に向けて)、検査チップ40をチップホルダ20に装着可能である。
【0031】
上記の構成では、モータ5の軸6が回転すると、軸6に固定されているプーリ7が回転する。プーリ7の回転は、ベルト9によりプーリ8に伝えられて、プーリ8が回転する。ひいては、プーリ8が固定されている主軸4が回転する。主軸4の回転に伴って、主軸4に軸ピン12を介して連結されている延出体10が回転する。延出体10の回転によって、軸21に固定されているチップホルダ20も回転する。これにより、主軸4の軸線方向と直交し、且つ、主軸4から離間する方向(図2に示す矢印Aの方向)に生じる遠心力が、検査チップ40に付与される。
【0032】
本実施形態では、主軸4は、正面視で(つまり、図1に示す検査装置1を右側から見た状態で)時計回り方向に360°回転可能である。主軸4の回転時に延出体10が主軸4の直上に至った場合、延出体10の高さ(つまり、延出体10と設置面との上下方向長さ)が最大となる(図1〜図3参照)。このときの主軸4の回転角度を、0°とする。一方、主軸4の回転時に延出体10が主軸4の直下に至った場合、延出体10の高さが最小となる(図4、図5参照)。このときの主軸4の回転角度を、180°とする。
【0033】
ソレノイド14がオン状態である場合は、図1〜図3に示すように、押圧ピン14Aが後側下方(図3に示す矢印S1の方向)に進出して、外側面10Bを押圧する。これにより、延出体10は、トーションバネ15の付勢力に抗って内側面10Aと対向する方向(図3に示す矢印T1の方向)に回転する。このとき、内側面10Aが第一角度設定部13Aに当接すると、延出体10の回転が規制されるとともに、角度θ2が下限角度で保持される。つまり、内側面10Aと第一角度設定部13Aとが接触する位置で、角度θ2の下限角度が規定される。
【0034】
本実施形態では、角度θ2の下限角度が角度θ1と等しくなるように(つまり、30°となるように)、第一角度設定部13Aの形成角度が調整されている。これにより、チップホルダ20が検査チップ40を水平に保持する状態(以下、第一状態と呼ぶ。)を実現できる。すなわち、ソレノイド14がオン状態である場合に、主軸4が回転角度0°まで回転すると、延出体10が図3に示す状態となる。この状態では、第一角度設定部13Aの延設方向は水平になり、第一角度設定部13Aに当接する延出体10の延設方向も水平になる。ひいては、図2に示すように、検査チップ40がチップホルダ20によって水平に保持されるため、上記の第一状態が実現される。
【0035】
ソレノイド14がオフ状態である場合は、図4に示すように、押圧ピン14Aが前側上方(図3に示す矢印S2の方向)に退入する。これにより、延出体10は、トーションバネ15の付勢力によって、外側面10Bと対向する方向(図4に示す矢印T2の方向)に回転する。このとき外側面10Bが第二角度設定部14Bに当接すると、延出体10の回転が規制されるとともに、角度θ2が上限角度で保持される。つまり、外側面10Bと第二角度設定部14Bとが接触する位置で、角度θ2の上限角度が規定される。
【0036】
本実施形態では、角度θ2の上限角度が90°から角度θ1を減じた角度(つまり、60°となるように)、第二角度設定部14Bの形成角度が調整されている。これにより、チップホルダ20が検査チップ40を垂直に保持する状態(以下、第二状態と呼ぶ。)を実現できる。すなわち、ソレノイド14がオフ状態である場合に、主軸4が回転角度180°まで回転すると、延出体10が図4に示す状態となる。この状態では、第二角度設定部14Bの延設方向は垂直になり、第二角度設定部14Bに当接する延出体10の延設方向も垂直になる。ひいては、図5に示すように、検査チップ40がチップホルダ20によって垂直に保持されるため、上記の第二状態が実現される。
【0037】
基部2上の所定位置には、前後方向に対向する光源23および検出器24が設けられている。チップホルダ20が第二状態になった場合、光源23および検出器24は検査チップ40を挟んで前後方向に対向する。光源23は、検査チップ40内で生成された試薬と検体との混合物(つまり、反応生成物)に、検査チップ40に対して後側から光を照射する。検出器24は、反応生成物を透過した光を、検査チップ40に対して前側で検出する。なお、光源23および検出器24を検査チップ40に対して同一方向に設けることで、反応生成物で反射する光を検出して各種測定を行ってもよい。
【0038】
図1に示すように、検査装置1は、基部2の外部に設けられた制御装置70に接続されている。制御装置70は、図示外のCPU、RAM、ROM等を内蔵して、検査装置1の各種動作(例えば、主軸4の回転や、ソレノイド14のオン・オフなど)を制御する。また、制御装置70は、光源23から光を照射させて、検出器24で受光量を検出することで、各種測定を実行できる。なお、制御装置70には、検査者が検査装置1の各種動作を指示するための操作部(図示外)が設けられている。
【0039】
図6を参照して、検査チップ40の構造について説明する。以下では、図6の上方、下方、右方、左方を、それぞれ、検査チップ40の前方、後方、右方、左方として説明する。図6の紙面手前側および紙面奥側を、それぞれ、検査チップ40の上方および下方として説明する。
【0040】
本実施形態では、検査装置1で検査チップ40を使用する場合、検査者が検査チップ40を第一状態にあるチップホルダ20に水平に装着する。このとき、検査者は、検査チップ40の前後方向が延出体10の延設方向と一致するように、且つ、検査チップ40の前側が主軸4と対向するように、検査チップ40をチップホルダ20に装着する(図1参照)。これにより、検査チップ40の前後方向と、主軸4の回転時に生じる遠心力の方向(図2に示す矢印Aの方向)とが、回転中心となる主軸4からみて同一側に延びる。よって、主軸4の回転時に生じる遠心力を、検査チップ40の前側から後方に作用させることができる。
【0041】
検査チップ40は、前後方向を長手方向とする、平面視長方形状の薄手の箱状体である。検査チップ40は、所定の厚みを有する合成樹脂の板材49によって外形が形成されている。検体投入口41および試薬投入口42が、板材49に平面視円形の窪みとして形成されている。図示しないが、検査チップ40の上面は、透明の合成樹脂製の蓋(図示外)で覆われている。この蓋には、検体投入口41および試薬投入口42と対応する位置のみに、それぞれ開口が形成されている。つまり、検査チップ40の上面のうちで、検体投入口41および試薬投入口42のみが上方に開口している。
【0042】
検体投入口41は、検査チップ40内に検体を供給するために、検査者が検体を投入する部位である。試薬投入口42は、検査チップ40内に試薬を供給するために、検査者が試薬を投入する部位である。従って、検査者は検査チップ40内に検体および試薬を投入して、これらの検体および試薬を混合させることができる。
【0043】
検体供給路43および試薬供給路44が、板材49に溝状に形成されている。検体供給路43は、検体投入口41から後方に延びる、検体の流路である。試薬供給路44は、試薬投入口42から後方に延びる、試薬の流路である。つまり、検体供給路43および試薬供給路44は、検査チップ40の前後方向(言い換えると、長手方向)に延設されている。検体供給路43および試薬供給路44の末端部(つまり、後端部)には、幅が狭くなった出口が各々設けられている。
【0044】
検体供給路43および試薬供給路44の後方側(図6における下方側)には、混合槽45が形成されている。混合槽45は、板材49に対する窪みとして形成された、平面視で検体供給路43および試薬供給路44から後方に凹む部位である。混合槽45では、検体供給路43から供給された検体と、試薬供給路44から供給された試薬とが混合されて、反応生成物が生成される。
【0045】
図7を参照して、検査装置1および検査チップ40を用いた検査方法について説明する。本実施形態では、検査者は、検査装置1の電源をオンにする前に、あらかじめ検査チップ40内に検体および試薬を収容する。具体的には、検査者は、検体投入口41に検体を滴下し、試薬投入口42に試薬を滴下する。検査者は、検査チップ40内に検体および試薬を収容すると、検査装置1の電源がオンにセットする。検査装置1の電源がオンにセットされると、制御装置70のCPUがROMに記憶されている制御プログラムに基づいて、図7に示すメイン処理を実行する。
【0046】
図7に示すように、電源がオンにセットされた検査装置1では、まずソレノイド14がオンにセットされる(S1)。これにより、ソレノイド14の押圧ピン14Aが進出して、延出体10が内側面10A側に回転し、且つ、角度θ2が下限角度で固定される(図3参照)。さらに、主軸4が回転角度0°まで回転される(S3)。これにより、図2に示すように、検査チップ40がチップホルダ20によって水平に保持される。つまり、ステップS1〜S3によって、チップホルダ20が第一状態になる。
【0047】
ステップS3の実行後、遠心処理の実行指示があるか否かが判断される(S5)。例えば、検査者が制御装置70の操作部(図示外)を使用して遠心処理の実行指示を入力した場合に、遠心処理の実行指示ありと判断される(S5:YES)。遠心処理の実行指示がない場合(S5:NO)、処理はステップS5に戻る。つまり、遠心処理の実行指示があるまで、チップホルダ20が第一状態で維持される。
【0048】
検査者は、遠心処理の実行指示を入力する前に、検体および試薬が収容された検査チップ40をチップホルダ20に装着する。このとき、チップホルダ20は第一状態であるため、検査者は検査チップ40を水平に装着することができる。このとき、検査チップ40内では、検体供給路43および試薬供給路44の形成方向が水平となる。よって、検査チップ40がチップホルダ20に装着されるときに、検査チップ40内で検体および試薬が想定外の流路に流出すること(例えば、検体および試薬が混合槽45以外の流路に流出すること)を抑制できる。
【0049】
検査者は、検査チップ40をチップホルダ20に装着したのち、遠心処理の実行指示を入力する(S5:YES)。この場合、ソレノイド14がオフにセットされる(S7)。これにより、ソレノイド14の押圧ピン14Aが退入して、延出体10が外側面10B側に回転し、且つ、角度θ2が上限角度で固定される(図4参照)。角度θ2が上限角度で固定された状態のもと、検査チップ40の遠心処理が実行される(S9)。すなわち、検査チップ40に所定の遠心力が付与されるように、主軸4が時計回り方向に所定時間回転される。
【0050】
図5に示すように、検査チップ40の遠心処理(S9)では、主軸4と直交する方向(矢印Aの方向)に作用する遠心力が、検査チップ40に対して付与される。つまり、検査チップ40では、遠心力が前側から後方に向けて作用する。これにより、図8に示すように、検体投入口41から投入された検体は、検体供給路43を経由して混合槽45に流出する。試薬投入口42から投入された試薬は、試薬供給路44を経由して混合槽45に流出する。混合槽45では、検体供給路43から供給された検体と試薬供給路44から供給された試薬とが混合されて、反応生成物が生成および貯留される。
【0051】
本実施形態では、角度θ2が上限角度で固定された状態で、検査チップ40の遠心処理が実行される(S7〜S9)。この状態では、角度θ2が下限角度で固定された状態と比較して、検査チップ40が回転中心(つまり、主軸4)から大きく離間した位置で保持される。よって、検査チップ40の遠心処理時により大きな遠心力が付与されるため、遠心処理を効率的に行うことができる。つまり、角度θ2を調整することで、主軸4の回転速度を一定にしつつ、検査チップ40に付与される遠心力の大きさを調整できる。
【0052】
図7に示すように、ステップS9の実行後、主軸4が回転角度180°まで回転される(S11)。これにより、図5に示すように、検査チップ40がチップホルダ20によって垂直に保持される。つまり、遠心処理が実行された直後に、ステップS11によってチップホルダ20が第二状態になる。このとき、検査チップ40内では、検体供給路43および試薬供給路44の形成方向が垂直となる。さらに、検査チップ40が光源23および検出器24に挟まれた所定位置(つまり、適正な検査位置)まで移動している。
【0053】
これにより、遠心処理の実行中は検査チップ40の後側に向けた遠心力が付与され、遠心処理の終了後は検査チップ40の後側に向けた重力が付与される(S9〜S11)。つまり、遠心処理が終了しても、検査チップ40に付与される外力の方向に変化がない。したがって、遠心処理の終了後に、検査チップ40内で生成された反応生成物が想定外の流路に流出すること(例えば、反応生成物が混合槽45から流出すること)を抑制できる。
【0054】
ステップS11の実行後、光源23から検査チップ40に対して光が照射される。検出器24で検査チップ40を透過した光が検出されることによって、検査結果が測定される(S13)。最後に、ステップS13で測定された検査結果が、制御装置70の画面(図示外)に表示される(S15)。
【0055】
以上説明したように、第一実施形態に係る検査装置1によれば、主軸4が設置面から30°上方に傾斜しているため、主軸4の軸線方向は垂直方向に対して60°傾斜している。これにより、主軸4の回転に伴って回転する延出体10も、水平方向に対して60°傾斜した方向に回転する。そのため、検査装置1は、延出体10を回転させるためのスペースとして、主軸4の周りで水平方向に確保すべき領域を小さくすることができる。その結果、検査装置1の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置1の設置面積を低減できる。
【0056】
さらに、検査装置1では、ソレノイド14のオン・オフによって、延出体10の延出角度を調整することができる。詳細には、ソレノイド14がオンである場合、延出体10が下限角度まで回転して、チップホルダ20が第一状態に保持される。この場合、検査者は検査チップ40を水平に維持しつつ、チップホルダ20に保持させることができる。また、ソレノイド14がオフである場合、延出体10が上限角度まで回転して、チップホルダ20が第二状態に保持される。この場合、検査チップ40の遠心処理が終了したのちに、検査チップ40に付与される外力の方向が変化することを抑制できる。
【0057】
第二実施形態に係る検査装置100について、図9および図10を参照して説明する。以下の説明では、第一実施形態に係る検査装置1と同一の構成には同一符号を付し、検査装置1と異なる点のみを説明する。
【0058】
図9に示すように、検査装置100は、先述の検査装置1と比較して、主軸4の延設角度が異なる。詳細には、角度θ3は、先述の角度θ1と同様に、主軸4の軸線方向と設置面の延びる方向(具体的には、水平方向)とがなす角度のうちで小さいほうの角度である。ただし、本実施形態では、角度θ3が45°となるように、主軸4の傾きが支持金具35によって規定されている。
【0059】
さらに、検査装置100は、先述の検査装置1とは異なり、延出体10の延出角度が固定されている。詳細には、主軸4の前端側では、延出体10の一端側(図9では右端側)が主軸4に対して固定ピン51で固定されている。さらに、主軸4と延出体10との間に、細長板状の連結体50が架け渡されている。連結体50の一端側(図9では左上側)は、延出体10における延設方向の略中央部に、固定ピン53で固定されている。連結体50の他端側(図9では右下側)は、連結体50が主軸4と直交する方向に延びるように、主軸4における固定ピン51よりも後方側に固定ピン52で固定されている。
【0060】
角度θ4は、先述の角度θ2と同様に、延出体10の延出角度である。ただし、本実施形態では、角度θ4が45°となるように、延出体10の傾きが連結体50によって規定されている。なお、図示しないが、検査装置100は、先述の検査装置1と同様に制御装置70(図1参照)を備える。
【0061】
検査装置100および検査チップ40を用いた検査方法は、第一実施形態と同様である。検査装置100の電源がオンにセットされると、制御装置70のCPUがROMに記憶されている制御プログラムに基づいて、図7に示すメイン処理を実行する。ただし、検査装置100では、ステップS1およびステップS7が省略されたメイン処理が実行される。
【0062】
すなわち、電源がオンにセットされた検査装置100では、まず主軸4が回転角度0°まで回転される(S3)。本実施形態では、角度θ3、θ4がともに45°であるため、主軸4が回転角度0°まで回転されると、検査チップ40がチップホルダ20によって水平に保持される(図9参照)。つまり、ステップS3によって、チップホルダ20が第一状態になる。
【0063】
検査者が検査チップ40をチップホルダ20に装着したのち、遠心処理の実行指示を入力すると(S5:YES)、図10に示すように検査チップ40の遠心処理が実行される(S9)。ステップS9の実行後、主軸4が回転角度180°まで回転される(S11)。本実施形態では、角度θ4が90°から角度θ3を減じた角度(つまり、45°)であるため、主軸4が回転角度180°まで回転されると、検査チップ40がチップホルダ20によって垂直に保持される(図10参照)。つまり、遠心処理が実行された直後に、ステップS11によってチップホルダ20が第二状態になる。その後、検査結果が測定される(S13)。最後に、ステップS13で測定された検査結果が、制御装置70の画面(図示外)に表示される(S15)。
【0064】
以上説明したように、第二実施形態に係る検査装置100によれば、主軸4が設置面から45°上方に傾斜しているため、主軸4の軸線方向は垂直方向に対して45°傾斜している。これにより、主軸4の回転に伴って回転する延出体10も、水平方向に対して45°傾斜した方向に回転する。そのため、検査装置100は、延出体10を回転させるためのスペースとして、主軸4の周りで水平方向に確保すべき領域を小さくすることができる。その結果、検査装置100の筺体が水平方向に大きくなることを抑制でき、ひいては検査装置100の設置面積を低減できる。
【0065】
さらに、検査装置100では、主軸4の回転角度を0°に調整するだけで、チップホルダ20が第一状態に保持される。この場合、検査者は検査チップ40を水平に維持しつつ、チップホルダ20に保持させることができる。また、主軸4の回転角度を180°に調整するだけで、チップホルダ20が第二状態に保持される。この場合、検査チップ40の遠心処理が終了したのちに、検査チップ40に付与される外力の方向が変化することを抑制できる。
【0066】
上記実施形態において、検体供給路43および試薬供給路44が、本発明の「液体回路」に相当する。検査チップ40が、本発明の「検査対象受体」に相当する。モータ5が、本発明の「駆動部」に相当する。延出体10が、本発明の「延出部」に相当する。チップホルダ20が、本発明の「受体保持部」に相当する。ソレノイド14が、本発明の「角度調整手段」に相当する。角度θ2が、本発明の「延出角度」に相当する。角度θ2の下限角度が、本発明の「第一角度」に相当する。角度θ2の上限角度が、本発明の「第二角度」に相当する。角度θ1が、本発明の「第三角度」に相当する。角度θ3が、本発明の「第四角度」に相当する。角度θ5が、本発明の「第五角度」に相当する。
【0067】
なお、本発明は、上記実施形態に限定されるものではなく、各種の変形が可能なことはいうまでもない。例えば、主軸4の軸長、傾き、軸径などは、適宜変更してもよい。ただし、主軸4の傾き(上記実施形態絵では、角度θ1、θ3)が大きいほど(例えば、45°よりも大)、延出体10を回転させるために主軸4の周りで水平方向に確保すべき領域が大きくなる。そのため、検査装置の設置面積を一層低減するために、主軸4の傾きは0°よりも大、且つ、45°以下であることが好適である。
【0068】
一方、主軸4の傾きが小さいほど、主軸4の先端側に付与される加重が大きくなる。主軸4の傾きが小さすぎる場合、遠心処理時に主軸4の湾曲が生じてしまい、例えば検査チップ40の振動などを生じるおそれがある。遠心処理時における主軸4の湾曲を抑制するためには、主軸4の傾きは30°以上であることが好適である。
【0069】
また、主軸4の傾きが小さいほど、検査チップ40に付与される遠心力は小さくなる。主軸4の傾きが小さすぎる場合、検査チップ40に付与される遠心力の大きさを確保するために、主軸4を回転させているモータ5の回転数を上げる必要がある。そうすると、例えばモータ5の大型化によって設置面積が拡大したり、モータ5の製造コストが上昇したり、遠心処理時に生じる振動が増大したりするおそれがある。検査チップ40に適切な遠心力を加えるためにも、主軸4の傾きは30°以上であることが好適である。
【0070】
さらに、主軸4の先端側に付与される加重および検査チップ40に付与される遠心力と、検査装置の設置面積とのバランスを考慮すると、主軸4の傾きが45°であることがより好適である。
【0071】
第一実施形態では、ソレノイド14によって延出体10の延出角度が調整されているが、他の角度調整部材(例えば、ステッピングモータなど)によって調整されてもよい。また、延出体10の延出角度が30°または60°に調整されているが、他の角度(例えば、45°など)に調整されてもよい。また、延出体10の延出角度が遠心処理の実行前に調整されているが、他のタイミングで調整されてもよい。例えば、遠心処理の実行中に延出体10の延出角度を調整した場合、主軸4の回転速度を変えることなく、且つ、主軸4の回転を止めることなく、遠心力の大きさを調整することができる。
【0072】
上記実施形態では、主軸4に1つの延出体10が連結されているが、主軸4に連結される延出体10の数量は適宜変更可能である。例えば、主軸4から相対する方向に延びるように2つの延出体10を設けてもよい。この場合、各々の延出体10に設けられたチップホルダ20にそれぞれ検査チップ40を保持させることで、2つの検査チップ40について同時に遠心処理を行うことができる。
【0073】
また、延出体10の全長、大きさ、形状なども適宜変更可能である。例えば、延出体10の全長をより大きくすることで、主軸4に対してより大きく離間した位置で、チップホルダ20に検査チップ40を保持させることが可能となる。この場合、検査チップ40の遠心処理時に付与される遠心力をより大きくすることができる。また、主軸4の全周側に延びるテーパ状の板状部材などで、延出体10を形成してもよい。
【符号の説明】
【0074】
1 検査装置
4 主軸
5 モータ
10 延出体
13 ブロック部
13A 第一角度設定部
14 ソレノイド
14A 押圧ピン
14B 第二角度設定部
15 トーションバネ
20 チップホルダ
23 光源
24 検出器
40 検査チップ
41 検体投入口
42 試薬投入口
43 検体供給路
44 試薬供給路
45 混合槽
70 制御装置
100 検査装置
【特許請求の範囲】
【請求項1】
検査対象である液体が移動可能な液体回路が形成された検査対象受体を回転させて、遠心力によって前記液体を前記液体回路内で移動させる検査装置であって、
装置設置面と直交する方向に対して交差する方向に延び、軸線周りに回転可能な主軸と、
前記主軸を前記軸線周りに回転させる駆動部と、
前記主軸から前記主軸の軸線方向と交差する方向に延出し、前記主軸の回転に伴って回転する延出部と、
前記延出部における前記主軸から離間した位置に設けられ、前記検査対象受体を保持する受体保持部と
を備えたことを特徴とする検査装置。
【請求項2】
前記延出部は、前記主軸と接続される部位を支点として、前記主軸の軸線方向と直交する方向を中心に揺動自在であり、
前記延出部を揺動させることによって、前記延出部の前記主軸からの延出角度を調整する角度調整手段を備えたことを特徴とする請求項1に記載の検査装置。
【請求項3】
前記角度調整手段は、前記検査対象受体が前記受体保持部に保持される前に、前記受体保持部が前記液体回路の形成方向を水平に維持しながら前記前記検査対象受体を保持可能な第一状態となるように、前記延出角度を第一角度に調整することを特徴とする請求項2に記載の検査装置。
【請求項4】
前記角度調整手段は、前記検査対象受体に前記遠心力が付与された後に、前記受体保持部が前記液体回路の形成方向を垂直に維持しながら前記前記検査対象受体を保持可能な第二状態となるように、前記延出角度を第二角度に調整することを特徴とする請求項2または3に記載の検査装置。
【請求項5】
前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第三角度は、0°よりも大、且つ、45°以下であることを特徴とする請求項1から4のいずれかに記載の検査装置。
【請求項6】
前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第四角度は、45°であり、
前記主軸のうちで前記延出部が接続される部位から前記装置設置面に向けて延びる部分と、前記延出部の延出方向とがなす第五角度は、45°であることを特徴とする請求項1に記載の検査装置。
【請求項1】
検査対象である液体が移動可能な液体回路が形成された検査対象受体を回転させて、遠心力によって前記液体を前記液体回路内で移動させる検査装置であって、
装置設置面と直交する方向に対して交差する方向に延び、軸線周りに回転可能な主軸と、
前記主軸を前記軸線周りに回転させる駆動部と、
前記主軸から前記主軸の軸線方向と交差する方向に延出し、前記主軸の回転に伴って回転する延出部と、
前記延出部における前記主軸から離間した位置に設けられ、前記検査対象受体を保持する受体保持部と
を備えたことを特徴とする検査装置。
【請求項2】
前記延出部は、前記主軸と接続される部位を支点として、前記主軸の軸線方向と直交する方向を中心に揺動自在であり、
前記延出部を揺動させることによって、前記延出部の前記主軸からの延出角度を調整する角度調整手段を備えたことを特徴とする請求項1に記載の検査装置。
【請求項3】
前記角度調整手段は、前記検査対象受体が前記受体保持部に保持される前に、前記受体保持部が前記液体回路の形成方向を水平に維持しながら前記前記検査対象受体を保持可能な第一状態となるように、前記延出角度を第一角度に調整することを特徴とする請求項2に記載の検査装置。
【請求項4】
前記角度調整手段は、前記検査対象受体に前記遠心力が付与された後に、前記受体保持部が前記液体回路の形成方向を垂直に維持しながら前記前記検査対象受体を保持可能な第二状態となるように、前記延出角度を第二角度に調整することを特徴とする請求項2または3に記載の検査装置。
【請求項5】
前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第三角度は、0°よりも大、且つ、45°以下であることを特徴とする請求項1から4のいずれかに記載の検査装置。
【請求項6】
前記主軸の軸線方向と、前記装置設置面とがなす角度のうちで小さいほうの第四角度は、45°であり、
前記主軸のうちで前記延出部が接続される部位から前記装置設置面に向けて延びる部分と、前記延出部の延出方向とがなす第五角度は、45°であることを特徴とする請求項1に記載の検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−232274(P2011−232274A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−104883(P2010−104883)
【出願日】平成22年4月30日(2010.4.30)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月30日(2010.4.30)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
[ Back to top ]