
検知装置および検知方法

【課題】1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知する。
【解決手段】センサ21は、車両に設置される熱式半導体フローセンサである。センサ21は、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する。異常検知部22は、センサ21から出力されるセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知し、検知結果を出力する。本発明は、例えば、車両の異常を検知する検知装置に適用することができる。
【解決手段】センサ21は、車両に設置される熱式半導体フローセンサである。センサ21は、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する。異常検知部22は、センサ21から出力されるセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知し、検知結果を出力する。本発明は、例えば、車両の異常を検知する検知装置に適用することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知装置および検知方法に関し、特に、熱式半導体フローセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができるようにした検知装置および検知方法に関する。
【背景技術】
【0002】
近年、車両セキュリティへの関心が高まっており、また、保険会社が定めている規定に準拠した盗難検知センサの設置等により車両保険の優遇が実施されているため、車両には盗難検知センサが設置されることが多い。このような盗難検知センサとして、加速度センサや角度センサなどが用いられる場合、盗難検知センサは、車両の傾きを検知し、車両の持ち去りなどを防止することができる(例えば、特許文献1参照)。
【0003】
また、盗難検知センサとして静電式振動センサが用いられる場合、盗難検知センサは、窓ガラスの破壊時の振動を検知し、窓ガラスを破壊して車内へ侵入し、車内の物品を持ち去ったり、車両を運転して逃走したりするといった車内で行われる盗難行為を防止することができる。さらに、盗難検知センサとして超音波センサや電波センサなどが用いられる場合、盗難検知センサは、車内への侵入を検知し、車内で行われる盗難行為を防止することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−283290号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、1つの盗難検知センサで車両の傾きと車内への侵入の両方を検知することはできない。従って、盗難検知センサによって車両の傾きと車内への侵入の両方を検知するためには、車両の傾きを検知する盗難検知センサと、車内への侵入を検知する盗難検知センサの2つの盗難検知センサを車両に取り付ける必要がある。そのため、車両に設置する盗難検知センサ全体のコストが上昇するとともに、消費電流や設置面積が増加する。従って、近年巧妙化している車両盗難の手口に対応し、様々な手口による盗難被害を防止することは困難である。
【0006】
本発明は、このような状況に鑑みてなされたものであり、熱式半導体フローセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができるようにするものである。
【課題を解決するための手段】
【0007】
本発明の一側面の検知装置は、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサと、前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知手段とを備える。
【0008】
本発明の一側面の検知装置においては、車両に設置される熱式半導体フローセンサにより、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号がセンサ信号として出力され、そのセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入が検知され、検知結果が出力される。
【0009】
従って、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。
【0010】
この異常検知手段は、例えば、マイクロコンピュータにより構成される。
【0011】
前記異常検知手段は、各位置における前記センサ信号の差分の特徴に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知することができる。
【0012】
前記異常検知手段は、前記車両のドアの開閉を表す開閉信号を取得し、その開閉信号と前記センサ信号に基づいて、前記車両内への物体の侵入を検知することができる。
【0013】
これにより、車両内への物体の侵入をより正確に検知することができる。
【0014】
検知装置は、前記異常検知手段から出力された前記検知結果に基づいて、前記車両の異常を警報する警報手段をさらに備える。
【0015】
これにより、車両の異常を周囲に知らせることができる。
【0016】
警報手段は、例えば、スピーカ、LED(Light Emitting Diode)などにより構成される。
【0017】
本発明の一側面の検知方法は、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサを備える検知装置が、前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知ステップを含む。
【0018】
本発明の一側面の検知方法においては、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサから出力されるセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入が検知され、検知結果が出力される。
【0019】
従って、本発明の一側面の検知装置における場合と同様に、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。
【0020】
この異常検知ステップは、例えば熱式半導体フローセンサから出力されるセンサ信号に基づいて車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知するマイクロコンピュータによる異常検知ステップにより構成される。
【発明の効果】
【0021】
以上のように、本発明の一側面によれば、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。その結果、様々な手口による盗難被害を防止することができる。
【図面の簡単な説明】
【0022】
【図1】本発明を適用した車両の一実施の形態の構成例を示す図である。
【図2】図1の検知装置の構成例を示すブロック図である。
【図3】図2のセンサの斜視図である。
【図4】センサ信号について説明する図である。
【図5】差分信号と車両の傾きの関係について説明する図である。
【図6】異常な傾きの検知方法について説明する図である。
【図7】車両の振動の検知方法について説明する図である。
【図8】車両の異常な振動の検知方法について説明する図である。
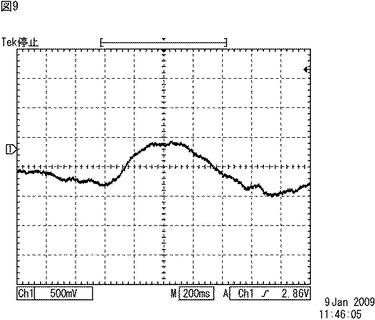
【図9】車両内への物体の侵入の検知方法について説明する図である。
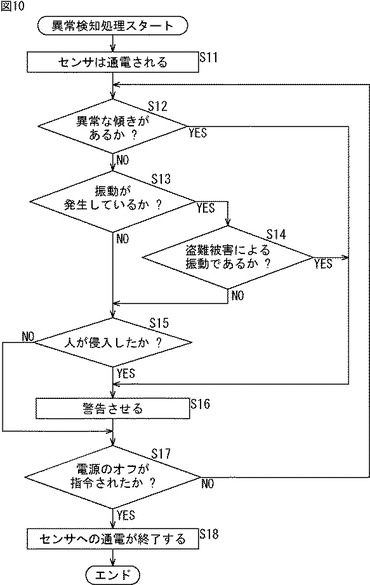
【図10】異常検知処理を説明するフローチャートである。
【発明を実施するための形態】
【0023】
<一実施の形態>
[車両の構成例]
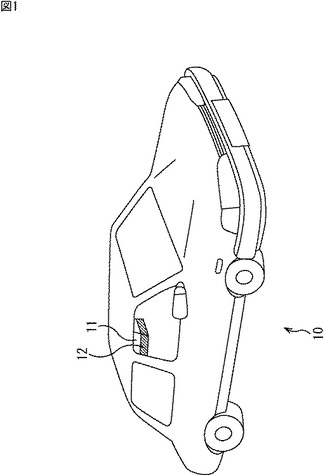
図1は、本発明を適用した車両の一実施の形態の構成例を示す図である。
【0024】
図1に示すように、車両10内の天井には、車両10内を照明するルームランプ11が設けられており、検知装置12は、例えば、ルームランプ11の外側に設置される。検知装置12は、車両10内の空気の流れによって、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知し、車両10に異常があるかどうかを判断する。そして、検知装置12は、車両10に異常があると判断した場合警報音などを出力し、周囲に車両10の異常を警報する。これにより、車両10の盗難を防止することができる。
【0025】
なお、検知装置12の設置場所は、ルームランプ11に限定されないが、ルームランプ、Bピラーなどの車両10内の空気の流れを検知しやすい場所に設置されることが望ましい。
[検知装置の構成例]
図2は、図1の検知装置12の構成例を示すブロック図である。
【0026】
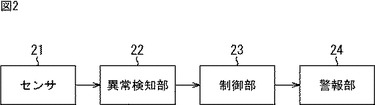
図2に示すように、検知装置12は、センサ21、異常検知部22、制御部23、および警報部24により構成される。なお、異常検知部22と制御部23は、例えば、マイクロコンピュータにより構成される。
【0027】
センサ21は、熱式半導体フローセンサなどよりなる。熱式半導体フローセンサとは、熱線式フローセンサをMEMS(Micro Electro Mechanical System)技術を応用して半導体化したものである。センサ21は、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号を、センサ信号として異常検知部22に出力する。なお、センサ21の詳細については後述する。
【0028】
異常検知部22は、センサ21から供給されるセンサ信号に基づいて、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知し、その検知結果を制御部23に供給する。
【0029】
制御部23は、異常検知部22からの検知結果に基づいて、車両10に異常があるかどうかを判断し、車両10に異常がある場合、警報部24に警報させる。
【0030】
警報部24は、スピーカ、LEDなどにより構成される。警報部24は、制御部23の制御にしたがって、スピーカから警報音を出力させたり、LEDを発光させたりすることにより、警報を行う。なお、警報部24は、車両10に装備されているエアバックの起動、ドアの開閉などを行うことにより、警報を行うようにしてもよい。
【0031】
[センサの詳細説明]
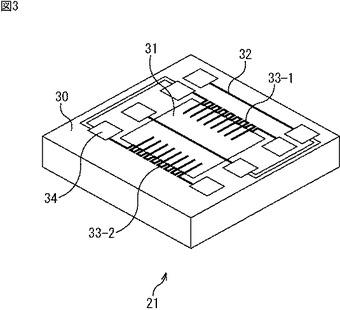
図3は、図2のセンサ21の斜視図である。
【0032】
図3に示すように、センサ21は、シリコン基板30に、ヒータ(heater)31、基準温度センサ32、サーモパイル(Thermopile)33−1および33−2、並びに8個の電極パッド(Electrode Pad)34を配置することにより構成される。
【0033】
ヒータ31は、外部から電極パッド34を介して流される電流により発熱し、基準温度センサ32で検知される周囲の温度を基準温度として、その基準温度から一定温度だけ周囲の温度を上昇させる。基準温度センサ32は、センサ21の周囲の温度を検知する。ヒータ31は、その温度を基準温度として、基準温度から一定温度だけ高くなるように発熱を制御する。
【0034】
サーモパイル33−1および33−2は、ヒータ31の近傍に対向して配置される。サーモパイル33−1および33−2は、それぞれ、自分自身の温度を表す電気的信号をセンサ信号として、電極パッド34を介して、異常検知部22に出力する。
【0035】
なお、以下では、サーモパイル33−1および33−2を特に区別する必要がない場合、それらをまとめてサーモパイル33という。
【0036】
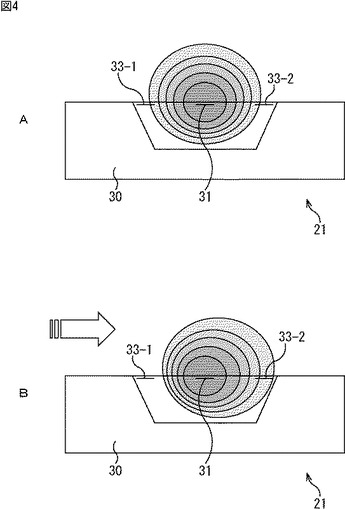
次に、図4を参照して、センサ21のセンサ信号について説明する。
【0037】
まず、センサ21が水平に設置されており、さらにセンサ21の周囲に空気などの流体の流れがない場合、図4Aに示すように、ヒータ31の近傍の温度の分布は左右対象であり、温度平衡が保たれる。
【0038】
これに対して、センサ21の周囲の流体が、サーモパイル33−1側(図中左側)からサーモパイル33−2側(図中右側)に流れる場合、図4Bに示すように、ヒータ31の近傍の温度の分布は、その流体の流速に応じた度合いでサーモパイル33−2側に偏る。即ち、ヒータ31の近傍の温度は、センサ21の周囲の流体の流速に応じた度合いで、風上側が低くなり、風下側が高くなる。
【0039】
従って、サーモパイル33−1のセンサ信号と、サーモパイル33−2のセンサ信号との差分(以下、差分信号という)により、センサ21の周囲の流体の流速を検知することができる。
【0040】
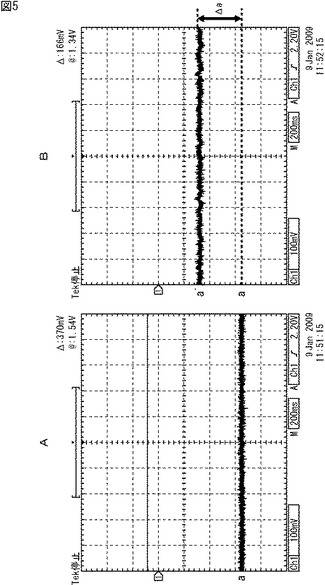
また、差分信号から車両10の傾きの角度を検知することができる。具体的には、例えば、停止している車両10が平衡を保っている場合、車両10内の空気に流れがない。従って、図4Aに示したように、ヒータ31の近傍の温度平衡が保たれ、図5Aに示すように、差分信号は、一定の値aとなる。なお、図5のグラフにおいて、横軸は時間を表し、縦軸は差分信号の値としての電圧値を表している。このことは、後述する図7乃至図9においても同様である。
【0041】
一方、停止している車両10が、サーモパイル33の一方が配置される側が高く、他方が配置される側が低くなるように傾いている場合、重力加速度の影響により、ヒータ31によって温まった空気による対流はサーモパイル33−1とサーモパイル33−2に対して非対称となる。従って、図4Bに示したように、ヒータ31の近傍の温度平衡が崩れ、図5Bに示すように、差分信号は、値aよりΔaだけ大きい一定の値a´となる。そして、このΔaは、センサ21の傾きに対応するので、このΔaから車両10の傾きの角度を検知することができる。
【0042】
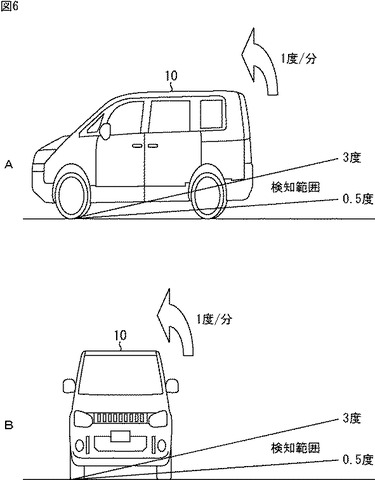
例えば、サーモパイル33が車両10の前後に並ぶようにセンサ21が設置された場合、差分信号から、図6Aに示すように、車両10の前後の傾きの角度を検知することができる。また、サーモパイル33が車両10の左右に並ぶようにセンサ21が設置された場合、差分信号から、図6Bに示すように、車両10の左右の傾きの角度を検知することができる。なお、図6の例では、車両10の傾きの角度の検知範囲が0.5度から3度となっているが、0度から90度まで検知は可能である。
【0043】
異常検知部22は、例えば、車両10の傾きの角速度が1度/分である場合、その傾きは車両10をレッカー車などで持ち去る際に発生する車両10の異常な傾きであると判断し、車両10の異常な傾きを検知する。
【0044】
なお、異常検知部22は、車両10が異常に傾いているかどうかを直接検知してもよい。この場合、異常検知部22は、例えば、センサ21からのセンサ信号の差分信号と車両10が平衡を保っている場合の差分信号との差分の絶対値が所定値以上であり、さらにその状態が所定時間以上継続している場合に車両10の異常な傾きを検知する。このように、差分信号の特徴に基づいて車両10の異常な傾きを検知することができる。一般的に差分信号はノイズ等によって揺らいでいるため、異常検知部22は、平均化処理を行った差分信号を用いて検知するようにしてもよい。
【0045】
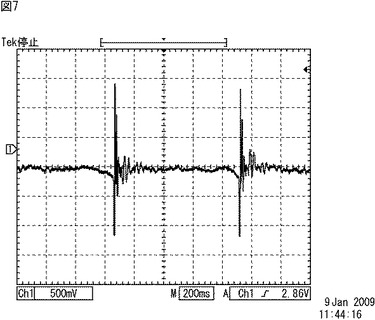
また、差分信号から車両10の振動を検知することができる。具体的には、例えば、停止している車両10が振動する場合、車両10内の空気も振動し、空気の流速は周期的に変化する。従って、図7に示すように、差分信号は周期的に変化する。よって、差分信号が周期的に変化することを検知することで、車両10の振動を検知することができる。
【0046】
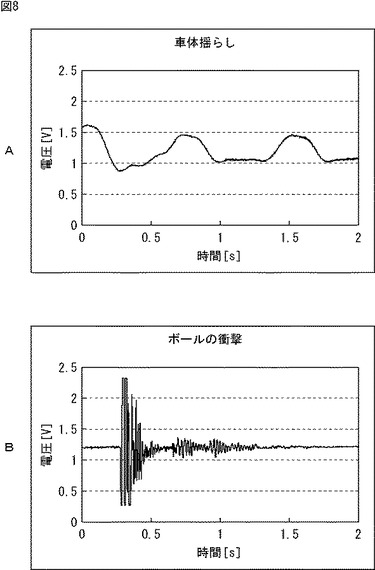
但し、車両10の振動には、窓ガラスが破壊される、窃盗犯により車両10が揺らされる等の盗難被害により発生されるものと、車両10にボールがぶつけられる等により盗難被害とは関係なく発生されるものとがある。そして、例えば、車両10が揺らされる場合、差分信号は、図8Aに示すように、比較的長い間隔で周期的に変化するが、車両10にボールがぶつけられる場合、差分信号は、図8Bに示すように、比較的短い間隔で周期的に変化しながら減衰する。
【0047】
従って、車両10の振動が検知された場合、異常検知部22は、さらに、差分信号の周期や、各周期における最大値の変化などにより、車両10の振動が盗難被害による振動であるかどうかを判定し、車両10の振動が盗難被害による振動である場合、車両10の異常な振動を検知する。
【0048】
例えば、差分信号が所定の第1の周期よりも短い周期で増減する場合、異常検知部22は、車両10の振動がボールなどにより車両10に一時的な衝撃が加わったことによる振動であると判断し、車両10の振動が盗難被害による振動ではないと判定する。一方、差分信号が所定の第2の周期よりも長い周期で増減する場合、異常検知部22は、車両10の振動が、車両10が揺らされていることによる振動であると判断し、車両10の振動が盗難被害による振動であると判定する。そして、異常検知部22は、車両10の異常な振動を検知する。
【0049】
さらに、差分信号から車両10内への物体の侵入を検知することができる。具体的には、例えば、停止している車両10内に人などが侵入した場合、人などの動作によって車両10内の空気が流れ、空気の流速は任意に変化する。従って、図9に示すように、差分信号は任意に変化する。よって、差分信号が周期性を有さず、さらに所定の時間以上継続して増減していると検知された場合、異常検知部22は、窓が開いて空気が流れたか、または、人が侵入してきたと判断し、車両10内への人などの侵入を検知する。
【0050】
なお、ドアが閉錠された車両10内への侵入には、窓ガラス等の破壊が不可欠であるため、異常検知部22は、例えば、窓ガラス等の破壊で生じる振動により差分信号に周期的な変化が生じた後、所定の時間以内に差分信号が変化した場合、車両10内への侵入を検知するようにしてもよい。
【0051】
[検知装置の処理の説明]
図10は、検知装置12の異常検知処理を説明するフローチャートである。この異常検知処理は、例えば、運転者が車両10を停止させ、検知装置12の電源をオンにしたとき開始される。
【0052】
ステップS11において、センサ21は、図示せぬ電源により通電される。これにより、センサ21からのセンサ信号の出力が開始される。
【0053】
ステップS12において、異常検知部22は、センサ21からのセンサ信号に基づいて車両10に異常な傾きがあるかどうか、例えば、センサ21からのセンサ信号の差分信号に対応する車両10の傾きの角速度が所定の角速度(例えば、1度/分)であるかどうかを判定する。
【0054】
ステップS12で車両10に異常な傾きがあると判定された場合、異常検知部22は、車両10の異常な傾きの検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0055】
一方、ステップS12で車両10に異常な傾きがないと判定された場合、ステップS13において、異常検知部22は、センサ信号に基づいて車両10に振動が発生しているかどうか、例えば、差分信号が周期的に変化しているかどうかを判定する。
【0056】
ステップS13で、車両10に振動が発生していると判定された場合、ステップS14において、異常検知部22は、センサ信号に基づいて、その振動が盗難被害による振動であるどうかを判定する。具体的には、例えば、異常検知部22は、差分信号が所定の第2の周期よりも長い周期で増減するかどうかを判定することにより、車両10に発生している振動が、窃盗犯により車両10が揺らされることによる振動であるかどうかを判定する。そして、異常検知部22は、車両10に発生している振動が、窃盗犯により車両10が揺らされることによる振動であると判定した場合、車両10に発生している振動は盗難被害による振動であると判定し、窃盗犯により車両10が揺らされていることによる振動ではないと判定した場合、盗難被害による振動ではないと判定する。
【0057】
ステップS14で、車両10に発生している振動が盗難被害による振動であると判定された場合、異常検知部22は、車両10の異常な振動の検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0058】
一方、ステップS13で車両10に振動が発生していないと判定された場合、または、ステップS14で車両10に発生している振動が盗難被害による振動ではないと判定された場合、処理はステップS15に進む。
【0059】
ステップS15において、異常検知部22は、センサ信号に基づいて車両10内に人などの物体が侵入したかどうか、例えば、差分信号が、窓ガラスの破壊で発生する振動により周期的に変化した後、所定の時間以内に変化したかどうかを判定する。
【0060】
ステップS15で車両10内に人などの物体が侵入したと判定された場合、異常検知部22は、車両10内への物体の侵入の検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0061】
ステップS16において、制御部23は、警報部24に警報させ、処理をステップS17に進める。
【0062】
一方、ステップS15で車両10内に人などの物体が侵入していないと判定された場合、異常検知部22は、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入の非検知を表す検知結果を制御部23に供給する。制御部23は、その検知結果に基づいて、
車両10に異常がないと判定する。そして処理はステップS17に進む。
【0063】
ステップS17において、センサ21は、運転者により検知装置12の電源のオフが指令されたかどうかを判定する。ステップS17で電源のオフが指令されていないと判定された場合、処理はステップS12に戻り、電源のオフが指令されるまで、ステップS12乃至S17の処理が繰り返される。
【0064】
また、ステップS17で電源のオフが指令されたと判定された場合、ステップS18において、図示せぬ電源からのセンサ21への通電が終了する。そして異常検知処理は終了する。
【0065】
以上のように、検知装置12は、熱式半導体フローセンサよりなるセンサ21を備え、そのセンサ21から出力されるセンサ信号に基づいて、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知するので、1つのセンサで車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知することができる。その結果、様々な手口による盗難被害を防止することができる。
【0066】
また、検知装置12は、センサ信号の差分信号の特徴によって、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知するので、車両10の異常を高精度に検知することができる。さらに、センサ21は、熱式半導体フローセンサであるので、振り子式の加速度センサ等に比べて、検知装置12の設置時の耐衝撃性が向上する。
【0067】
なお、上述した説明では、検知装置12は、車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知したが、検知対象はこれに限定されず、ドアの開閉等を検知することもできる。
【0068】
また、上述した説明では、異常検知部22は、差分信号のみを用いて検知を行ったが、差分信号の他に、外部のECU(Electronic Control Unit)等から取得される車両10のドアの開閉を表す開閉信号などの車両情報も用いて検知するようにしてもよい。この場合、より正確に検知することができる。
【0069】
例えば、開閉信号がドアの閉錠を表す開閉信号である場合、窃盗犯は窓ガラスを破壊して侵入する必要があるため、異常検知部22は、差分信号が、窓ガラスの破壊で発生する振動により周期的に変化した後、所定の時間以内に変化したかどうかを判定することで、車両10内への侵入を検知する。一方、開閉信号がドアの開錠を表す開閉信号である場合、窃盗犯は窓ガラスを破壊して侵入する必要がないため、異常検知部22は、差分信号が変化したかどうかを判定することで、車両10内への侵入を検知する。以上により、窓ガラスが破壊されていない場合であっても、ドアが開錠されており、差分信号が変化した場合には、車両10への物体の侵入を検知することができる。
【0070】
また、差分信号と車両情報を用いて検知を行う場合、車両情報によって実行する判定処理を選択することにより、異常検知処理の処理負荷を軽減することができる。
【0071】
例えば、車両情報がドアや窓の閉錠を表している場合、異常検知部22は、車両10内への侵入は行われないと判断して、図10のステップS15の侵入の判定処理を省略し、車両情報がドアや窓の開錠を表している場合、異常検知部22は、車両10のレッカー車などによる持ち去りや窓ガラスの破壊は行われないと判断して、図10のステップS12乃至S14の異常な傾きおよび振動の判定処理を省略することができる。これにより、異常検知処理の処理負荷は軽減する。
【0072】
さらに、上述した異常検知部22の検知方法は一例であり、推定される様々な盗難の手口により発生する車両10の傾きおよび振動並びに車両10内への物体の侵入に対応する差分信号のレベルや時間的変化などを特徴として解析することで取得した他の検知方法を用いるようにしてもよい。また、検知に用いられる閾値は、複数設定されてもよい。
【0073】
本実施の形態では、車両10に1つのセンサ21のみが設置されたが、複数のセンサを設置するようにしてもよい。この場合、異常検知部22は、例えば、複数のセンサからのセンサ信号の差分信号を用いて定常的な振動成分を消去することができる。また、異常検知部22は、複数のセンサの差分信号の波形の関係によって、差分信号の変化が車両10の傾きによるものなのか、車両10内への人などの侵入によるものなのかを、より正確に判定することができる。その結果、より精度良く車両10の異常を検知することができる。
【0074】
なお、本明細書において、異常検知処理は、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0075】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0076】
12 検知装置, 21 センサ,22 異常検知部, 24 警報部
【技術分野】
【0001】
本発明は、検知装置および検知方法に関し、特に、熱式半導体フローセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができるようにした検知装置および検知方法に関する。
【背景技術】
【0002】
近年、車両セキュリティへの関心が高まっており、また、保険会社が定めている規定に準拠した盗難検知センサの設置等により車両保険の優遇が実施されているため、車両には盗難検知センサが設置されることが多い。このような盗難検知センサとして、加速度センサや角度センサなどが用いられる場合、盗難検知センサは、車両の傾きを検知し、車両の持ち去りなどを防止することができる(例えば、特許文献1参照)。
【0003】
また、盗難検知センサとして静電式振動センサが用いられる場合、盗難検知センサは、窓ガラスの破壊時の振動を検知し、窓ガラスを破壊して車内へ侵入し、車内の物品を持ち去ったり、車両を運転して逃走したりするといった車内で行われる盗難行為を防止することができる。さらに、盗難検知センサとして超音波センサや電波センサなどが用いられる場合、盗難検知センサは、車内への侵入を検知し、車内で行われる盗難行為を防止することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−283290号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、1つの盗難検知センサで車両の傾きと車内への侵入の両方を検知することはできない。従って、盗難検知センサによって車両の傾きと車内への侵入の両方を検知するためには、車両の傾きを検知する盗難検知センサと、車内への侵入を検知する盗難検知センサの2つの盗難検知センサを車両に取り付ける必要がある。そのため、車両に設置する盗難検知センサ全体のコストが上昇するとともに、消費電流や設置面積が増加する。従って、近年巧妙化している車両盗難の手口に対応し、様々な手口による盗難被害を防止することは困難である。
【0006】
本発明は、このような状況に鑑みてなされたものであり、熱式半導体フローセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができるようにするものである。
【課題を解決するための手段】
【0007】
本発明の一側面の検知装置は、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサと、前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知手段とを備える。
【0008】
本発明の一側面の検知装置においては、車両に設置される熱式半導体フローセンサにより、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号がセンサ信号として出力され、そのセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入が検知され、検知結果が出力される。
【0009】
従って、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。
【0010】
この異常検知手段は、例えば、マイクロコンピュータにより構成される。
【0011】
前記異常検知手段は、各位置における前記センサ信号の差分の特徴に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知することができる。
【0012】
前記異常検知手段は、前記車両のドアの開閉を表す開閉信号を取得し、その開閉信号と前記センサ信号に基づいて、前記車両内への物体の侵入を検知することができる。
【0013】
これにより、車両内への物体の侵入をより正確に検知することができる。
【0014】
検知装置は、前記異常検知手段から出力された前記検知結果に基づいて、前記車両の異常を警報する警報手段をさらに備える。
【0015】
これにより、車両の異常を周囲に知らせることができる。
【0016】
警報手段は、例えば、スピーカ、LED(Light Emitting Diode)などにより構成される。
【0017】
本発明の一側面の検知方法は、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサを備える検知装置が、前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知ステップを含む。
【0018】
本発明の一側面の検知方法においては、車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサから出力されるセンサ信号に基づいて、車両の異常な傾きおよび振動並びに車両内への物体の侵入が検知され、検知結果が出力される。
【0019】
従って、本発明の一側面の検知装置における場合と同様に、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。
【0020】
この異常検知ステップは、例えば熱式半導体フローセンサから出力されるセンサ信号に基づいて車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知するマイクロコンピュータによる異常検知ステップにより構成される。
【発明の効果】
【0021】
以上のように、本発明の一側面によれば、1つのセンサで車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知することができる。その結果、様々な手口による盗難被害を防止することができる。
【図面の簡単な説明】
【0022】
【図1】本発明を適用した車両の一実施の形態の構成例を示す図である。
【図2】図1の検知装置の構成例を示すブロック図である。
【図3】図2のセンサの斜視図である。
【図4】センサ信号について説明する図である。
【図5】差分信号と車両の傾きの関係について説明する図である。
【図6】異常な傾きの検知方法について説明する図である。
【図7】車両の振動の検知方法について説明する図である。
【図8】車両の異常な振動の検知方法について説明する図である。
【図9】車両内への物体の侵入の検知方法について説明する図である。
【図10】異常検知処理を説明するフローチャートである。
【発明を実施するための形態】
【0023】
<一実施の形態>
[車両の構成例]
図1は、本発明を適用した車両の一実施の形態の構成例を示す図である。
【0024】
図1に示すように、車両10内の天井には、車両10内を照明するルームランプ11が設けられており、検知装置12は、例えば、ルームランプ11の外側に設置される。検知装置12は、車両10内の空気の流れによって、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知し、車両10に異常があるかどうかを判断する。そして、検知装置12は、車両10に異常があると判断した場合警報音などを出力し、周囲に車両10の異常を警報する。これにより、車両10の盗難を防止することができる。
【0025】
なお、検知装置12の設置場所は、ルームランプ11に限定されないが、ルームランプ、Bピラーなどの車両10内の空気の流れを検知しやすい場所に設置されることが望ましい。
[検知装置の構成例]
図2は、図1の検知装置12の構成例を示すブロック図である。
【0026】
図2に示すように、検知装置12は、センサ21、異常検知部22、制御部23、および警報部24により構成される。なお、異常検知部22と制御部23は、例えば、マイクロコンピュータにより構成される。
【0027】
センサ21は、熱式半導体フローセンサなどよりなる。熱式半導体フローセンサとは、熱線式フローセンサをMEMS(Micro Electro Mechanical System)技術を応用して半導体化したものである。センサ21は、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号を、センサ信号として異常検知部22に出力する。なお、センサ21の詳細については後述する。
【0028】
異常検知部22は、センサ21から供給されるセンサ信号に基づいて、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知し、その検知結果を制御部23に供給する。
【0029】
制御部23は、異常検知部22からの検知結果に基づいて、車両10に異常があるかどうかを判断し、車両10に異常がある場合、警報部24に警報させる。
【0030】
警報部24は、スピーカ、LEDなどにより構成される。警報部24は、制御部23の制御にしたがって、スピーカから警報音を出力させたり、LEDを発光させたりすることにより、警報を行う。なお、警報部24は、車両10に装備されているエアバックの起動、ドアの開閉などを行うことにより、警報を行うようにしてもよい。
【0031】
[センサの詳細説明]
図3は、図2のセンサ21の斜視図である。
【0032】
図3に示すように、センサ21は、シリコン基板30に、ヒータ(heater)31、基準温度センサ32、サーモパイル(Thermopile)33−1および33−2、並びに8個の電極パッド(Electrode Pad)34を配置することにより構成される。
【0033】
ヒータ31は、外部から電極パッド34を介して流される電流により発熱し、基準温度センサ32で検知される周囲の温度を基準温度として、その基準温度から一定温度だけ周囲の温度を上昇させる。基準温度センサ32は、センサ21の周囲の温度を検知する。ヒータ31は、その温度を基準温度として、基準温度から一定温度だけ高くなるように発熱を制御する。
【0034】
サーモパイル33−1および33−2は、ヒータ31の近傍に対向して配置される。サーモパイル33−1および33−2は、それぞれ、自分自身の温度を表す電気的信号をセンサ信号として、電極パッド34を介して、異常検知部22に出力する。
【0035】
なお、以下では、サーモパイル33−1および33−2を特に区別する必要がない場合、それらをまとめてサーモパイル33という。
【0036】
次に、図4を参照して、センサ21のセンサ信号について説明する。
【0037】
まず、センサ21が水平に設置されており、さらにセンサ21の周囲に空気などの流体の流れがない場合、図4Aに示すように、ヒータ31の近傍の温度の分布は左右対象であり、温度平衡が保たれる。
【0038】
これに対して、センサ21の周囲の流体が、サーモパイル33−1側(図中左側)からサーモパイル33−2側(図中右側)に流れる場合、図4Bに示すように、ヒータ31の近傍の温度の分布は、その流体の流速に応じた度合いでサーモパイル33−2側に偏る。即ち、ヒータ31の近傍の温度は、センサ21の周囲の流体の流速に応じた度合いで、風上側が低くなり、風下側が高くなる。
【0039】
従って、サーモパイル33−1のセンサ信号と、サーモパイル33−2のセンサ信号との差分(以下、差分信号という)により、センサ21の周囲の流体の流速を検知することができる。
【0040】
また、差分信号から車両10の傾きの角度を検知することができる。具体的には、例えば、停止している車両10が平衡を保っている場合、車両10内の空気に流れがない。従って、図4Aに示したように、ヒータ31の近傍の温度平衡が保たれ、図5Aに示すように、差分信号は、一定の値aとなる。なお、図5のグラフにおいて、横軸は時間を表し、縦軸は差分信号の値としての電圧値を表している。このことは、後述する図7乃至図9においても同様である。
【0041】
一方、停止している車両10が、サーモパイル33の一方が配置される側が高く、他方が配置される側が低くなるように傾いている場合、重力加速度の影響により、ヒータ31によって温まった空気による対流はサーモパイル33−1とサーモパイル33−2に対して非対称となる。従って、図4Bに示したように、ヒータ31の近傍の温度平衡が崩れ、図5Bに示すように、差分信号は、値aよりΔaだけ大きい一定の値a´となる。そして、このΔaは、センサ21の傾きに対応するので、このΔaから車両10の傾きの角度を検知することができる。
【0042】
例えば、サーモパイル33が車両10の前後に並ぶようにセンサ21が設置された場合、差分信号から、図6Aに示すように、車両10の前後の傾きの角度を検知することができる。また、サーモパイル33が車両10の左右に並ぶようにセンサ21が設置された場合、差分信号から、図6Bに示すように、車両10の左右の傾きの角度を検知することができる。なお、図6の例では、車両10の傾きの角度の検知範囲が0.5度から3度となっているが、0度から90度まで検知は可能である。
【0043】
異常検知部22は、例えば、車両10の傾きの角速度が1度/分である場合、その傾きは車両10をレッカー車などで持ち去る際に発生する車両10の異常な傾きであると判断し、車両10の異常な傾きを検知する。
【0044】
なお、異常検知部22は、車両10が異常に傾いているかどうかを直接検知してもよい。この場合、異常検知部22は、例えば、センサ21からのセンサ信号の差分信号と車両10が平衡を保っている場合の差分信号との差分の絶対値が所定値以上であり、さらにその状態が所定時間以上継続している場合に車両10の異常な傾きを検知する。このように、差分信号の特徴に基づいて車両10の異常な傾きを検知することができる。一般的に差分信号はノイズ等によって揺らいでいるため、異常検知部22は、平均化処理を行った差分信号を用いて検知するようにしてもよい。
【0045】
また、差分信号から車両10の振動を検知することができる。具体的には、例えば、停止している車両10が振動する場合、車両10内の空気も振動し、空気の流速は周期的に変化する。従って、図7に示すように、差分信号は周期的に変化する。よって、差分信号が周期的に変化することを検知することで、車両10の振動を検知することができる。
【0046】
但し、車両10の振動には、窓ガラスが破壊される、窃盗犯により車両10が揺らされる等の盗難被害により発生されるものと、車両10にボールがぶつけられる等により盗難被害とは関係なく発生されるものとがある。そして、例えば、車両10が揺らされる場合、差分信号は、図8Aに示すように、比較的長い間隔で周期的に変化するが、車両10にボールがぶつけられる場合、差分信号は、図8Bに示すように、比較的短い間隔で周期的に変化しながら減衰する。
【0047】
従って、車両10の振動が検知された場合、異常検知部22は、さらに、差分信号の周期や、各周期における最大値の変化などにより、車両10の振動が盗難被害による振動であるかどうかを判定し、車両10の振動が盗難被害による振動である場合、車両10の異常な振動を検知する。
【0048】
例えば、差分信号が所定の第1の周期よりも短い周期で増減する場合、異常検知部22は、車両10の振動がボールなどにより車両10に一時的な衝撃が加わったことによる振動であると判断し、車両10の振動が盗難被害による振動ではないと判定する。一方、差分信号が所定の第2の周期よりも長い周期で増減する場合、異常検知部22は、車両10の振動が、車両10が揺らされていることによる振動であると判断し、車両10の振動が盗難被害による振動であると判定する。そして、異常検知部22は、車両10の異常な振動を検知する。
【0049】
さらに、差分信号から車両10内への物体の侵入を検知することができる。具体的には、例えば、停止している車両10内に人などが侵入した場合、人などの動作によって車両10内の空気が流れ、空気の流速は任意に変化する。従って、図9に示すように、差分信号は任意に変化する。よって、差分信号が周期性を有さず、さらに所定の時間以上継続して増減していると検知された場合、異常検知部22は、窓が開いて空気が流れたか、または、人が侵入してきたと判断し、車両10内への人などの侵入を検知する。
【0050】
なお、ドアが閉錠された車両10内への侵入には、窓ガラス等の破壊が不可欠であるため、異常検知部22は、例えば、窓ガラス等の破壊で生じる振動により差分信号に周期的な変化が生じた後、所定の時間以内に差分信号が変化した場合、車両10内への侵入を検知するようにしてもよい。
【0051】
[検知装置の処理の説明]
図10は、検知装置12の異常検知処理を説明するフローチャートである。この異常検知処理は、例えば、運転者が車両10を停止させ、検知装置12の電源をオンにしたとき開始される。
【0052】
ステップS11において、センサ21は、図示せぬ電源により通電される。これにより、センサ21からのセンサ信号の出力が開始される。
【0053】
ステップS12において、異常検知部22は、センサ21からのセンサ信号に基づいて車両10に異常な傾きがあるかどうか、例えば、センサ21からのセンサ信号の差分信号に対応する車両10の傾きの角速度が所定の角速度(例えば、1度/分)であるかどうかを判定する。
【0054】
ステップS12で車両10に異常な傾きがあると判定された場合、異常検知部22は、車両10の異常な傾きの検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0055】
一方、ステップS12で車両10に異常な傾きがないと判定された場合、ステップS13において、異常検知部22は、センサ信号に基づいて車両10に振動が発生しているかどうか、例えば、差分信号が周期的に変化しているかどうかを判定する。
【0056】
ステップS13で、車両10に振動が発生していると判定された場合、ステップS14において、異常検知部22は、センサ信号に基づいて、その振動が盗難被害による振動であるどうかを判定する。具体的には、例えば、異常検知部22は、差分信号が所定の第2の周期よりも長い周期で増減するかどうかを判定することにより、車両10に発生している振動が、窃盗犯により車両10が揺らされることによる振動であるかどうかを判定する。そして、異常検知部22は、車両10に発生している振動が、窃盗犯により車両10が揺らされることによる振動であると判定した場合、車両10に発生している振動は盗難被害による振動であると判定し、窃盗犯により車両10が揺らされていることによる振動ではないと判定した場合、盗難被害による振動ではないと判定する。
【0057】
ステップS14で、車両10に発生している振動が盗難被害による振動であると判定された場合、異常検知部22は、車両10の異常な振動の検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0058】
一方、ステップS13で車両10に振動が発生していないと判定された場合、または、ステップS14で車両10に発生している振動が盗難被害による振動ではないと判定された場合、処理はステップS15に進む。
【0059】
ステップS15において、異常検知部22は、センサ信号に基づいて車両10内に人などの物体が侵入したかどうか、例えば、差分信号が、窓ガラスの破壊で発生する振動により周期的に変化した後、所定の時間以内に変化したかどうかを判定する。
【0060】
ステップS15で車両10内に人などの物体が侵入したと判定された場合、異常検知部22は、車両10内への物体の侵入の検知を表す検知結果を制御部23に供給し、処理をステップS16に進める。
【0061】
ステップS16において、制御部23は、警報部24に警報させ、処理をステップS17に進める。
【0062】
一方、ステップS15で車両10内に人などの物体が侵入していないと判定された場合、異常検知部22は、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入の非検知を表す検知結果を制御部23に供給する。制御部23は、その検知結果に基づいて、
車両10に異常がないと判定する。そして処理はステップS17に進む。
【0063】
ステップS17において、センサ21は、運転者により検知装置12の電源のオフが指令されたかどうかを判定する。ステップS17で電源のオフが指令されていないと判定された場合、処理はステップS12に戻り、電源のオフが指令されるまで、ステップS12乃至S17の処理が繰り返される。
【0064】
また、ステップS17で電源のオフが指令されたと判定された場合、ステップS18において、図示せぬ電源からのセンサ21への通電が終了する。そして異常検知処理は終了する。
【0065】
以上のように、検知装置12は、熱式半導体フローセンサよりなるセンサ21を備え、そのセンサ21から出力されるセンサ信号に基づいて、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知するので、1つのセンサで車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知することができる。その結果、様々な手口による盗難被害を防止することができる。
【0066】
また、検知装置12は、センサ信号の差分信号の特徴によって、車両10の異常な傾きおよび振動並びに車両10内への物体の侵入を検知するので、車両10の異常を高精度に検知することができる。さらに、センサ21は、熱式半導体フローセンサであるので、振り子式の加速度センサ等に比べて、検知装置12の設置時の耐衝撃性が向上する。
【0067】
なお、上述した説明では、検知装置12は、車両の異常な傾きおよび振動並びに車両内への物体の侵入を検知したが、検知対象はこれに限定されず、ドアの開閉等を検知することもできる。
【0068】
また、上述した説明では、異常検知部22は、差分信号のみを用いて検知を行ったが、差分信号の他に、外部のECU(Electronic Control Unit)等から取得される車両10のドアの開閉を表す開閉信号などの車両情報も用いて検知するようにしてもよい。この場合、より正確に検知することができる。
【0069】
例えば、開閉信号がドアの閉錠を表す開閉信号である場合、窃盗犯は窓ガラスを破壊して侵入する必要があるため、異常検知部22は、差分信号が、窓ガラスの破壊で発生する振動により周期的に変化した後、所定の時間以内に変化したかどうかを判定することで、車両10内への侵入を検知する。一方、開閉信号がドアの開錠を表す開閉信号である場合、窃盗犯は窓ガラスを破壊して侵入する必要がないため、異常検知部22は、差分信号が変化したかどうかを判定することで、車両10内への侵入を検知する。以上により、窓ガラスが破壊されていない場合であっても、ドアが開錠されており、差分信号が変化した場合には、車両10への物体の侵入を検知することができる。
【0070】
また、差分信号と車両情報を用いて検知を行う場合、車両情報によって実行する判定処理を選択することにより、異常検知処理の処理負荷を軽減することができる。
【0071】
例えば、車両情報がドアや窓の閉錠を表している場合、異常検知部22は、車両10内への侵入は行われないと判断して、図10のステップS15の侵入の判定処理を省略し、車両情報がドアや窓の開錠を表している場合、異常検知部22は、車両10のレッカー車などによる持ち去りや窓ガラスの破壊は行われないと判断して、図10のステップS12乃至S14の異常な傾きおよび振動の判定処理を省略することができる。これにより、異常検知処理の処理負荷は軽減する。
【0072】
さらに、上述した異常検知部22の検知方法は一例であり、推定される様々な盗難の手口により発生する車両10の傾きおよび振動並びに車両10内への物体の侵入に対応する差分信号のレベルや時間的変化などを特徴として解析することで取得した他の検知方法を用いるようにしてもよい。また、検知に用いられる閾値は、複数設定されてもよい。
【0073】
本実施の形態では、車両10に1つのセンサ21のみが設置されたが、複数のセンサを設置するようにしてもよい。この場合、異常検知部22は、例えば、複数のセンサからのセンサ信号の差分信号を用いて定常的な振動成分を消去することができる。また、異常検知部22は、複数のセンサの差分信号の波形の関係によって、差分信号の変化が車両10の傾きによるものなのか、車両10内への人などの侵入によるものなのかを、より正確に判定することができる。その結果、より精度良く車両10の異常を検知することができる。
【0074】
なお、本明細書において、異常検知処理は、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0075】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0076】
12 検知装置, 21 センサ,22 異常検知部, 24 警報部
【特許請求の範囲】
【請求項1】
車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサと、
前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知手段と
を備える検知装置。
【請求項2】
前記異常検知手段は、各位置における前記センサ信号の差分の特徴に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知する
請求項1に記載の検知装置。
【請求項3】
前記異常検知手段は、前記車両のドアの開閉を表す開閉信号を取得し、その開閉信号と前記センサ信号に基づいて、前記車両内への物体の侵入を検知する
請求項1に記載の検知装置。
【請求項4】
前記異常検知手段から出力された前記検知結果に基づいて、前記車両の異常を警報する警報手段
をさらに備える
請求項1に記載の検知装置。
【請求項5】
車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサを備える検知装置が、
前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知ステップ
を含む検知方法。
【請求項1】
車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサと、
前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知手段と
を備える検知装置。
【請求項2】
前記異常検知手段は、各位置における前記センサ信号の差分の特徴に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知する
請求項1に記載の検知装置。
【請求項3】
前記異常検知手段は、前記車両のドアの開閉を表す開閉信号を取得し、その開閉信号と前記センサ信号に基づいて、前記車両内への物体の侵入を検知する
請求項1に記載の検知装置。
【請求項4】
前記異常検知手段から出力された前記検知結果に基づいて、前記車両の異常を警報する警報手段
をさらに備える
請求項1に記載の検知装置。
【請求項5】
車両に設置され、内蔵するヒータ周辺の複数の位置における温度に対応する電気的信号をセンサ信号として出力する熱式半導体フローセンサを備える検知装置が、
前記熱式半導体フローセンサから出力される前記センサ信号に基づいて、前記車両の異常な傾きおよび振動並びに前記車両内への物体の侵入を検知し、検知結果を出力する異常検知ステップ
を含む検知方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−188945(P2010−188945A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−37463(P2009−37463)
【出願日】平成21年2月20日(2009.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月20日(2009.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]