
極端紫外光源装置、極端紫外光源装置の制御方法及びターゲット供給装置
【課題】極端紫外光源装置の稼働率を向上させる。
【解決手段】チャンバ装置は、レーザ光源110と共に用いられるチャンバ装置であって、前記レーザ光源110から出力されるレーザ光L1を内部に導入するための少なくとも1つの入射口が設けられたチャンバ100と、前記チャンバ100に設けられ、前記チャンバ100内の所定の位置にターゲット物質200を供給するターゲット供給部120と、所定条件が成立した場合に、前記タ―ゲット供給部120に対してリカバリ動作の実行を指示するリカバリ制御部301と、前記リカバリ制御部301からの指示に応じて前記リカバリ動作を実行するリカバリ部400と、前記ターゲット供給部120から前記チャンバ100内に供給されるターゲット物質200の位置を計測する位置計測部302と、を備えてもよい。
【解決手段】チャンバ装置は、レーザ光源110と共に用いられるチャンバ装置であって、前記レーザ光源110から出力されるレーザ光L1を内部に導入するための少なくとも1つの入射口が設けられたチャンバ100と、前記チャンバ100に設けられ、前記チャンバ100内の所定の位置にターゲット物質200を供給するターゲット供給部120と、所定条件が成立した場合に、前記タ―ゲット供給部120に対してリカバリ動作の実行を指示するリカバリ制御部301と、前記リカバリ制御部301からの指示に応じて前記リカバリ動作を実行するリカバリ部400と、前記ターゲット供給部120から前記チャンバ100内に供給されるターゲット物質200の位置を計測する位置計測部302と、を備えてもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、極端紫外光源装置、極端紫外光源装置の制御方法及びターゲット供給装置に関する。
【背景技術】
【0002】
13.5nmという極端に波長の短い光と縮小光学系とを使用する、半導体露光技術が研究されている。この技術は、EUVL(Extreme Ultra Violet Lithography:極端紫外線露光)と呼ばれる。以下、極端紫外光をEUV光と呼ぶ。
【0003】
EUV光源としては、例えば、LPP(Laser Produced Plasma:レーザ生成プラズマ)式の光源が知られている。LPP式光源とは、ターゲット物質にレーザ光を照射してプラズマを生成し、このプラズマから放射されるEUV光を利用する光源である。LPP式光源は、プラズマ密度を高くすることができ、かつ、捕集立体角を大きくできるため、高出力のEUV光を得られる可能性が高い。
【0004】
LPP式のEUV光源装置では、ターゲット物質として錫(Sn)が用いられる。ターゲット物質は、ターゲット供給部から、ドロップレット状のターゲット物質としてチャンバ内に射出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2006/0192154号明細書
【特許文献2】米国特許出願公開第2006/0192155号明細書
【特許文献3】米国特許第7449703号明細書
【概要】
【0006】
本開示の1つの実施形態に従うチャンバ装置は、レーザ光源と共に用いられるチャンバ装置であって、前記レーザ光源から出力されるレーザ光を内部に導入するための少なくとも1つの入射口が設けられたチャンバと、前記チャンバに設けられ、前記チャンバ内の所定の位置にターゲット物質を供給するターゲット供給部と、所定条件が成立した場合に、前記タ―ゲット供給部に対してリカバリ動作の実行を指示するリカバリ制御部と、前記リカバリ制御部からの指示に応じて前記リカバリ動作を実行するリカバリ部と、前記ターゲット供給部から前記チャンバ内に供給されるターゲット物質の位置を計測する位置計測部と、を備えてもよい。
【0007】
本開示の他の実施形態に従うターゲット供給部のメンテナンス方法は、チャンバ、ターゲット供給部、リカバリ制御部、リカバリ部および位置計測部を備えるチャンバ装置において、前記タ―ゲット供給部をメンテナンスする方法であって、前記ターゲット供給部に対してリカバリ動作を実行するか否かの判定用情報を取得することと、前記リカバリ動作を実行すると判定された際に、前記リカバリ動作が実行可能なタイミングであるか否かを判定することと、前記リカバリ動作が実行可能なタイミングであると判定された際に、前記リカバリ制御部が前記リカバリ部に前記リカバリ動作を指示することと、前記リカバリ部が、前記リカバリ制御部の指示に応じて、所定のリカバリ動作を実行することと、を含んでもよい。
【図面の簡単な説明】
【0008】
【図1】第1実施形態に係るEUV光源装置の構成図である。
【図2】ターゲット供給部を拡大して示す図である。
【図3】リカバリフラグを設定する処理のフローチャートである。
【図4】リカバリ制御処理を示すフローチャートである。
【図5】図4中の通常モードの処理を示すフローチャートである。
【図6】第2実施形態に係り、異物を除去する様子を示す模式図である。
【図7】第3実施形態に係り、異物を除去する様子を示す模式図である。
【図8】第4実施形態に係り、異物を除去する様子を示す模式図である。
【図9】第5実施形態に係り、異物を除去する様子を示す模式図である。
【図10】ターゲット供給部の拡大図である。
【図11】第6実施形態に係り、異物を除去する様子を示す模式図である。
【図12A】第7実施形態に係り、異物を除去する様子を示す模式図である。
【図12B】第7実施形態に係り、ノズル部及びガスパイプの断面図である。
【図13】第8実施形態に係り、異物を除去する様子を示す模式図である。
【図14A】第9実施形態に係り、異物を除去する様子を示す模式図である。
【図14B】第9実施形態に係り、絶縁部及びガス流路の断面図である。
【図15】第10実施形態に係るターゲット供給部の断面図である。
【図16A】第11実施形態に係り、異物を除去する様子を示す模式図である。
【図16B】第11実施形態に係り、ノズル部及びガスパイプの断面図である。
【図17A】第12実施形態に係り、異物を除去する様子を示す模式図である。
【図17B】第12実施形態に係り、絶縁部及びガス流路の断面図である。
【図18】第13実施形態に係り、異物を除去する様子を示す模式図である。
【図19】第14実施形態に係るターゲット供給部の断面図である。
【図20A】第15実施形態に係り、異物を除去する様子を示す模式図である。
【図20B】第15実施形態に係り、異物を除去する様子を示す模式図である。
【図21A】第16実施形態に係り、異物を除去する様子を示す模式図である。
【図21B】第16実施形態に係り、異物を除去する様子を示す模式図である。
【図22A】第17実施形態に係り、異物を除去する様子を示す模式図である。
【図22B】第17実施形態に係り、異物を除去する様子を示す模式図である。
【図23A】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図23B】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図23C】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図24】第19実施形態に係り、コレクタミラーを異物から保護する様子を示す説明図である。
【図25A】保護カバーの位置の切替を示す説明図である。
【図25B】保護カバーの位置の切替を示す説明図である。
【図26】第20実施形態に係り、コレクタミラーを異物から保護する様子を示す説明図である。
【図27】リカバリフラグを設定する処理のフローチャートである。
【図28】リカバリフラグを設定する他の処理のフローチャートである。
【図29】リカバリフラグを設定するさらに他の処理のフローチャートである。
【図30】リカバリフラグを設定するさらに別の処理のフローチャートである。
【実施の形態】
【0009】
以下、本開示の実施形態について、図面を参照しながら詳しく説明する。以下に説明される実施形態は、本開示の一例を示すものであって、本開示の内容を限定するものではない。また、各実施形態で説明される構成及び動作の全てが本開示の構成及び動作として必須であるとは限らない。なお、実施形態の間で共通する構成要素については重複する説明を省略する。
【実施形態1】
【0010】
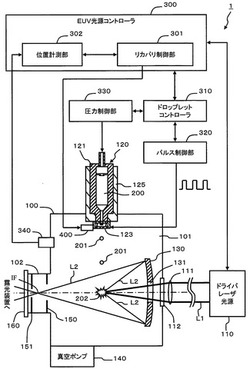
図1−図5に基づいて第1実施形態を説明する。図1は、EUV光源装置1の全体構成を示す説明図である。EUV光源装置1は、例えば、真空チャンバ100と、ドライバレーザ光源110と、ターゲット供給部120と、EUV集光ミラー130と、真空ポンプ140と、アパーチャを有する隔壁150,151と、ゲートバルブ160と、EUV光源コントローラ300と、ドロップレットコントローラ310と、パルス制御部320と、圧力制御部330とを、備えることができる。
【0011】
上記の各構成1,100,110,120,130,140,150,151,160,300,310,320,330は、少なくともそれぞれ一つずつ設けられており、説明のため本開示では単数形で記述される。しかし、その限りではなく各構成を複数備えてもよい。以下の説明では、基本的に単数形で記述する。ドロップレット201は、複数形で記述される場合もある。従って、本実施形態では、droplet(s)と表記する場合がある。
【0012】
真空チャンバ100は、容積の大きい第1チャンバ101と、容積の小さい第2チャンバ102とを有する。第1チャンバ101は、プラズマの生成等が行われるメインチャンバである。第2チャンバ102は、プラズマから放射されるEUV光を図外の露光装置に供給するための接続用チャンバである。
【0013】
第1チャンバ101には真空ポンプ140が接続されている。これにより、チャンバ100内は低圧状態に保持される。なお、第2チャンバ102に、別の真空ポンプを設ける構成としてもよい。その場合には、第1チャンバ101内の圧力を第2チャンバ102内の圧力よりも低くすることにより、デブリ(debris)が露光装置側に流れ込むのを抑制することができる。
【0014】
ターゲット供給部120は、例えば、錫(Sn)等のターゲット物質200で形成されるドロップレット201をチャンバ100内に射出する装置である。ドロップレット201は、レーザ光が照射されるターゲットである。ターゲット供給部120の本体部121は、溶融状態のターゲット物質200を収容しており、本体部121内には所定の圧力を加えることができる。
【0015】
ターゲット供給部120のノズル先端側には、「中間構造物」の一例である電極部123が設けられている。電極部123に、例えば、所定のパルス電圧が印加されると、ターゲット物質200と電極部123との間に電界が発生する。これにより、ターゲット供給部120からドロップレット201が引き出されて、チャンバ100内に向かって射出される。なお、ターゲット供給部120の詳細構成は、図2を参照に後述する。また、ドロップレットの射出は、上記のような電界によるものに限定しない。例えば、溶融ターゲットへの加圧による射出などでもよい。
【0016】
ドライバレーザ光源110は、ドロップレット201をプラズマ化するためのパルスレーザL1を出力する。ドライバレーザ光源110は、例えば、CO2(炭酸ガス)パルスレーザ光源として構成することができる。ドライバレーザ光源110は、例えば、波長10.6μm、出力20kW、パルス繰返し周波数30〜100kHz、パルス幅20nsecの仕様を有するレーザ光L1を出力する。なお、ドライバレーザ光源110の仕様は、上記の例に限定されない。さらに、CO2パルスレーザ光源以外の他の光源を用いる構成でもよい。
【0017】
ドライバレーザ光源110から出力されるレーザ光L1は、集光レンズ111と入射窓112とを介して、第1チャンバ101内に入射する。第1チャンバ101内に入射したレーザ光L1は、EUV集光ミラー130に設けられた入射穴131を通過して、ドロップレット201を照射する。
【0018】
ドロップレット201にレーザ光L1が集光照射されると、ドロップレット201はプラズマ生成点202において、プラズマ化する。以下、便宜上、単にプラズマと呼ぶ。プラズマは、波長13.5nmのEUV光L2を含む光を放射する。
【0019】
プラズマから放射されたEUV光L2は、EUVを集めるためのコレクタミラー130に入射し、コレクタミラー130により反射される。コレクタミラー130は、その反射表面が回転楕円面形状に形成されている。コレクタミラー130で反射されたEUV光L2は、第2チャンバ102内の中間集光点(IF:Intermediate Focus)に集光される。IFに集光されたEUV光L2は、開状態のゲートバルブ160を介して、露光装置へ導かれる。
【0020】
なお、本実施形態では、ドライバレーザ光源110のレーザ光出力周期に対応させて、EUV光生成に必要な量のドロップレット201を生成する。従って、デブリの発生量は少ない。しかし、デブリによる悪影響を低減させるべく、例えば、図1において、EUV光L2の光路を紙面に対して上下又は垂直な方向から挟むようにして、2つの磁場発生用コイル(不図示)を設けてもよい。各磁場発生コイルにより生成される磁場で、イオン性のデブリを捕捉できる。
【0021】
IFの前後には、2つの隔壁150,151が配置されている。コレクタミラー130で反射されたEUV光L2の進行方向を基準とすると、IFの手前側には、第1隔壁150が設けられている。IFの先には、第2隔壁151が設けられている。隔壁150,151は、例えば、それぞれ数mm〜10mm程度の開口部を有する。
【0022】
第1隔壁150は、第1チャンバ101と第2チャンバ102とを接続する位置近傍に設けられている。第2隔壁151は、第2チャンバ102と露光装置とを接続する位置近傍に設けられている。なお、IFの前後いずれか一方又は両方に、SPF(Spectral Purity Filter)を設けて、13.5nm以外の波長の光を遮断する構成としてもよい。
【0023】
次に、EUV光源装置1の制御構成300〜330を説明する。EUV光源コントローラ300は、EUV光源装置1の動作を制御する。EUV光源コントローラ300は、ドロップレットコントローラ310及びドライバレーザ光源110に、指示を与える。その指示により、所定のタイミングでドロップレット201が射出される。射出されたドロップレット201には、パルスレーザ光L1が照射される。さらに、EUV光源コントローラ300は、真空ポンプ140及びゲートバルブ160等の動作も制御する。
【0024】
さらに、EUV光源コントローラ300は、少なくとも一つのリカバリ制御部301と、少なくとも一つの位置計測部302とを備える。リカバリ制御部301は、リカバリ部400にターゲット供給部120を自動的にメンテナンスさせて、ターゲット供給部120を正常状態に回復させるための機能を有する。位置計測部302は、少なくとも一つの位置検出センサ340からの信号に基づいて、ドロップレット201の位置を計測し、その結果をリカバリ制御部301に通知する機能を有する。リカバリ制御の方法は後述する。
【0025】
なお、リカバリ制御部301及び位置計測部302は、EUV光源コントローラ300とは別のコントローラとして構成してもよいし、ドロップレットコントローラ310内に設ける構成としてもよい。
【0026】
位置検出センサ340は、例えば、カメラ、光学的センサ、電磁的センサ等の、ドロップレット201の位置を検出可能なセンサとして構成される。同一種類の、又は異なる種類の、位置検出センサ340を複数設ける構成でもよい。
【0027】
ドロップレットコントローラ310は、ターゲット供給部120の動作を制御する。ドロップレットコントローラ310には、パルス制御部320と圧力制御部330とが接続される。
【0028】
パルス制御部320は、ターゲット供給部120の先端側に設けられている電極部123に、所定のパルス電圧を印加するための装置である。パルス制御部320は、例えば、少なくとも一つの高電圧直流電源装置と、高電圧直流電源装置から入力される直流高電圧をパルスとして出力する少なくとも一つのスイッチングドライバと、スイッチングドライバにパルス周期を入力する少なくとも一つのパルス発生器とを含む(いずれも不図示)。
【0029】
圧力制御部330は、ターゲット供給部120の本体部121の内部に、所定の圧力を加えるための装置である。本体部121の内部は、圧力制御部330から供給される不活性ガス(例えば、アルゴンガス)により、所定の圧力に制御される。
【0030】
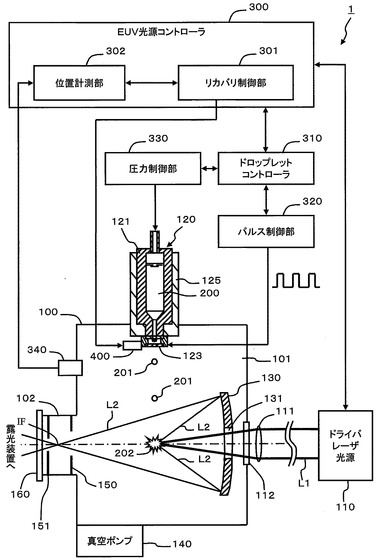
図2は、ターゲット供給部120及び圧力制御部330の構成を示す図である。先にターゲット供給部120の構成を説明する。ターゲット供給部120は、例えば、少なくとも一つの本体部121と、少なくとも一つのノズル部122と、少なくとも一つの電極部123と、少なくとも一つの絶縁部124と、少なくとも一つの加熱部125とを備える。
【0031】
本体部121は、ターゲット物質200を収容するものである。本体部121は、その先端部(図2中の下側)121Aが第1チャンバ101内に突出するようにして、チャンバ100に取り付けられている。本体部121内には、ターゲット物質200を収容するための収容部121Bが設けられている。先端部121A内には、射出流路部121Cが設けられている。
【0032】
収容部121Bは、本体部121の基端側(図2中の上側)に接続される配管126を介して、圧力制御部330に接続されている。射出流路部121Cは、収容部121B内とノズル部122との間を連通している。圧力制御部330からの不活性ガスは、配管126を介して、本体部121の収容部121Bに供給される。
【0033】
さらに、本体部121の外面側には、加熱部125が設けられている。加熱部125は、例えば、電熱ヒータ等で構成される。加熱部125は、本体部121内の錫が300℃程度の温度となるように加熱する。なお、300℃という値は一例であり、本開示はその値に限定されない。すなわち、ターゲット物質200が液体である温度であればよい。
【0034】
ノズル部122は、例えば、円盤状に形成されている。ノズル部122の中心部には、円形状の射出孔122Aが形成されている。射出孔122Aと本体部121の収容部121Bとは連通している。さらに、ノズル部122の下面側には、第1チャンバ101内のプラズマ生成点202に向けて突出するように、下向き円錐形状のノズル122Bがノズル部122と一体的に設けられている。ノズル122Bが、第1チャンバ101内に突出するようにして形成されているのは、ノズル122Bの先端に電界を集中させるためである。
【0035】
ノズル部122の材質について説明する。第1に、ノズル部122は、ターゲット物質としての錫に接触するため、錫に化学的または物理的に浸食されにくい材質であることが求められる。錫に浸食されにくい性質のことを、本明細書では、錫についての耐浸食性と呼ぶ。錫についての耐浸食性を有する材料としては、例えば、モリブデン(Mo)、タングステン(W)、タンタル(Ta)、チタン(Ti)、ステンレス、ダイヤモンド、セラミックス等を挙げることができる。また、セラミックス以外の材料としては炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンでもよい。セラミックスとしては、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスを挙げることができる。なお、本実施の形態では、ターゲット物質として錫を例に挙げたが、ターゲット物質は錫に限定されない。錫以外の物質をターゲット物質として用いる場合、ノズル部122は当該物質についての耐侵食性を有する任意の物質で形成されるのが好ましい。以下の説明においても、ターゲット物質として錫を単なる一例として説明するが、ターゲット物質は錫に限定されない。いずれの場合においても、錫以外の物質をターゲット物質として用いる場合、以下で錫についての耐侵食性が求められる各構成要素は、当該物質についての耐侵食性を有する任意の物質で構成することができる。
【0036】
第2に、ノズル部122内のターゲット物質200に電界を集中させるという観点からは、ノズル部122は、電気的絶縁性を有する方が好ましい。錫についての耐浸食性を有する各材料のうち、絶縁性を有する材料としては、ダイヤモンド又はセラミックスが知られている。従って、ノズル部122は、ダイヤモンド又はセラミックスから構成するのが好ましい。しかし、それらに限らず、ダイヤモンド又はセラミックス以外の材料から形成されるノズル部も、本開示の範囲に含まれる。たとえば、セラミックス以外の材料としては炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを挙げることができる。また、セラミックスとしては、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスを挙げることができる。
【0037】
本体部121には、少なくとも、錫についての耐浸食性が求められる。本体部121の全体のうち、錫に接触する部分は、錫についての耐浸食性を備えることが好ましい。
【0038】
中心部に貫通孔が設けられた円盤状の電極部123は、ノズル部122の下側に絶縁部124を挟んでノズル部122から離間して設けられている。電極部123の射出孔123Aとノズル122Bとは同軸状に位置している。射出孔123Aとノズル122B先端との間には、所定のギャップが形成される。
【0039】
電極部123の材質について説明する。第1に、電極部123は錫に接触する可能性があるため、錫についての耐浸食性を備えることが好ましい。第2に、電極部123は、スパッタに対して強い性質を備える必要がある。プラズマからの高速な錫粒子が電極部123の表面に衝突するおそれがあるためである。第3に、電極部123は導電性を備える必要がある。以上の条件を考慮すると、電極部123は、例えば、モリブデン、タングステン、タンタル、チタン、ステンレス等から形成されるのが好ましい。
【0040】
電極部123には、ドロップレット201の一部が付着し、異物210として残る可能性がある(図6参照)。そこで、後述の実施形態では、ノズル部122とプラズマ生成点202との間に位置する中間構造物としての電極部123を、ターゲット物質200に対して濡れ性の低い材料から形成する。これにより、電極部123に付着した異物210を落下させて、取り除くことができるようにしている。そのために、例えば、モリブデン、タングステン等の金属、または、アルミナ等のセラミックスから、電極部123を形成するか、それらの材料で電極部123をコーティングするのが好ましい。コーティング材料としては、炭化珪素、窒化珪素、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンや、これらを主成分とするセラミックスを挙げることができる。
【0041】
絶縁部124は、少なくともその一部がノズル部122と電極部123との間に挟設されるように設けられている。絶縁部124の内周側には、空間部124Aが形成される。ノズル122Bは、空間部124A内に突出するようにして設けられている。ノズル122Bと射出孔123Aとは、それぞれの中心軸が略一致する。
【0042】
絶縁部124は、ノズル部122と電極部123とを位置決めする機能の他に、絶縁機能及び伝熱機能を実現することが好ましい。絶縁機能とは、ノズル部122と電極部123との間を電気的に絶縁する機能である。伝熱機能とは、加熱部125で生じる熱を電極部123に導く機能である。これにより、ノズル部122及び電極部123の温度を錫の融点よりも高くして、ノズル部122と電極部123とに錫が固着するのを防止することができる。
【0043】
絶縁部124の材質について説明する。絶縁機能及び伝熱機能を考慮すると、絶縁部124は、絶縁性及び熱伝導率の高い材料から構成されるのが好ましい。従って、絶縁部124は、例えば、窒化アルミニウム(AlN)又はダイヤモンド等の材料から構成することができる。あるいは、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスから構成してもよい。
【0044】
圧力制御部330の構成について説明する。圧力制御部330は、例えば、一つの圧力コントローラ331と、一つの圧力調整弁332と、一つの排気ポンプ333と、一つの供給弁334と、一つの排出弁335とを備える。圧力制御部330は、一つのガス供給部336からのガスを、圧力調整弁332等を介して、ターゲット供給部120の本体部121内に供給する。なお、ターゲット物質200を加圧するためのガスとして、本実施形態ではアルゴンガスを用いる。しかし、アルゴンガス以外の不活性ガスを用いることもできる。
【0045】
圧力調整弁332は、ガス供給部336から流入し配管126内に送り出されるガスの圧力を、圧力コントローラ331により設定される所定値に調整して、配管126内に送り出す。配管126は圧力調整弁332から本体部121に至るガスの経路の一部を構成する。所定値の圧力に調整されたガスは、配管126へ至る配管経路の途中に設けられる供給弁334を介して、本体部121内に供給される。
【0046】
排気ポンプ333は、本体部121内のガスを排出するためのポンプである。供給弁334を閉弁し、かつ、排気通路126Aの途中に設けられる排出弁335を開弁した状態で、排気ポンプ333を作動させる。これにより、本体部121内のガスが排出される。
【0047】
ターゲット物質200に一定の圧力を加えた状態で、電極部123にパルス電圧を所定周期で印加する。その所定周期は、ドライバレーザ光源110から出力されるレーザ光L1の周期に対応させるように設定される。パルス電圧は、矩形波、三角波、正弦波のいずれでもよい。
【0048】
ガスが収容部121B内のターゲット物質200を加圧すると、ノズル122Bからターゲット物質200が僅かに突出する。但し、この状態では、ターゲット物質200はノズル122Bから外部に射出されない。つまり、ノズル122Bには、下向きに突出するメニスカスが形成される。
【0049】
ターゲット物質200をガスで加圧した状態で、電極部123にパルス電圧を印加すると、ノズル122Bから僅かに突出していたターゲット物質200が、静電吸引力によってノズル先端から切り離される。ノズル122Bから引き出されたターゲット物質200は、ドロップレット201としてプラズマ生成点202に向けて射出される。静電吸引力によって切り離されたドロップレット201は帯電している。
【0050】
本実施形態では、本体部121内のターゲット物質200をガスによって加圧した状態で、ノズル122Bに対向して設けられる電極部123にパルス電圧を印加する。これにより、本実施形態では、ノズル122Bから、必要に応じて必要なサイズのドロップレット201を射出することができる。
【0051】
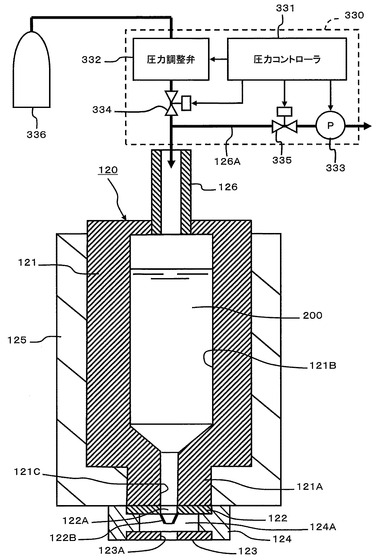
図3は、リカバリフラグを設定する処理を示すフローチャートである。リカバリフラグは、リカバリ動作を実行すべき時期が到来したことを示す情報である。リカバリ動作とは、ターゲット供給部120からプラズマ生成点202に向けてターゲット物質200を正確に射出できるように、ターゲット供給部120から異物210を除去する動作である。本処理は、リカバリ制御部301により実行される。
【0052】
リカバリ制御部301は、判定用情報を取得し(S10)、リカバリフラグを設定するための条件が成立したか否かを判定する(S11)。設定条件が成立する場合(S11:YES)、リカバリ制御部301は、リカバリフラグを設定する(S12)。設定条件が成立しない場合(S11:NO)、S10に戻る。
【0053】
判定用情報とは、リカバリフラグの設定の可否を判定するために使用される情報である。判定用情報としては、例えば、前回のリカバリ動作からの経過時間、ターゲット供給部120の起動回数、ターゲット供給部120の稼働積算時間、プラズマ生成点202におけるドロップレット201の位置精度等を挙げることができる。さらに、ターゲット供給部120の加熱回数や加熱時間、ドロップレットの射出回数や射出時間を判定用情報として用いてもよい。
【0054】
リカバリ制御部301は、上述の各判定用情報のうちの少なくともいずれか一つに基づいて、リカバリフラグの設定の可否を判定する。判定用情報を用いた具体的な例は、別の実施形態で後述する。
【0055】
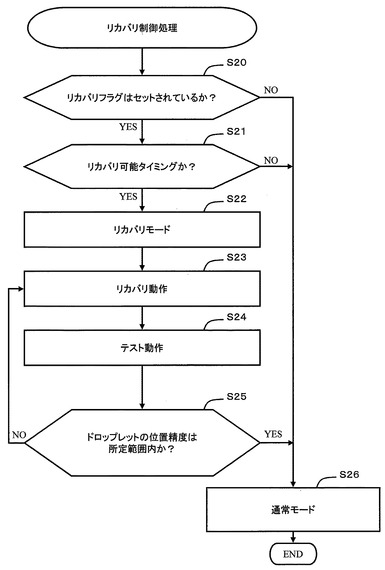
図4は、リカバリ制御処理のフローチャートである。リカバリ制御部301は、リカバリフラグが設定されているか否かを判定する(S20)。リカバリフラグが設定されていない場合(S20:NO)、リカバリ制御部301は、通常モードに移行する(S26)。通常モードにおける処理の内容は、図5で後述する。
【0056】
リカバリフラグが設定されている場合(S20:YES)、リカバリ制御部301は、リカバリ可能なタイミングであるか否かを判定する(S21)。リカバリ可能なタイミングではない場合(S21:NO)、リカバリ制御部301は、通常モードに移行する(S26)。
【0057】
リカバリ可能なタイミングとは、リカバリ動作を実施できるタイミングを意味する。例えば、リカバリフラグが設定されている場合でも、露光装置で露光作業が行われている間は、EUV光の出力を停止することはできない。一連の作業が終了するまで、EUV光源装置1は、EUV光を供給し続ける必要がある。そこで、本実施形態では、例えば、露光装置での作業が一定時間休止するタイミングを待ち、一定時間の休止が確定された時点でリカバリ動作を実施する。リカバリ制御部301は、露光装置に問い合わせることにより、又は、露光装置からの信号を取得することにより、露光装置での作業が一定時間休止するタイミングを判断することができる。
【0058】
リカバリ可能なタイミングである場合(S21:YES)、リカバリ制御部301は、リカバリモードに移行する(S22)。リカバリ制御部301は、リカバリ部400に指示を与えることにより、リカバリ部400にリカバリ動作を実行させる(S23)。
【0059】
リカバリ動作が実行された後、リカバリ制御部301は、ターゲット供給部120にテスト動作を実行させる(S24)。テスト動作とは、いわゆる試し撃ちであり、ターゲット供給部120にドロップレット201を所定数又は所定時間だけ射出させる。
【0060】
リカバリ制御部301は、位置計測部302による計測結果に基づいて、ターゲット供給部120から射出されたドロップレット201のプラズマ生成点202付近における位置精度が所定範囲内にあるか否かを判定する(S25)。
【0061】
たとえば、リカバリ制御部301は、ドロップレット201の位置変動(3σ)の値がドロップレット201の直径Dの1/n(例えば、n=2〜3)以下になっているか否かを判定する。nの値は例示である。
【0062】
試し撃ちされたドロップレット201の位置精度が所定範囲内に収まっている場合(S25:YES)、リカバリ制御部310は、リカバリモードから通常モードに移行する(S26)。これとは逆に、ドロップレット201の位置精度が所定範囲内に収まっていない場合(S25:NO)、リカバリ制御部301は、再度リカバリ動作を実行させる(S23)。
【0063】
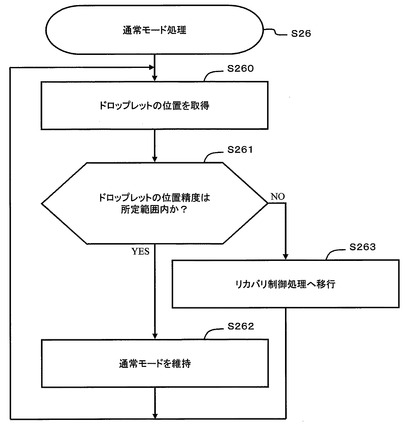
図5は、図4中の通常モード処理(S26)の詳細を示すフローチャートである。リカバリ制御部301は、位置計測部302からの計測結果に基づいて、ドロップレット201の位置を取得する(S260)。なお、通常モードとは、所定のタイミングで、ドロップレット201が射出される状態である。通常モードにおいて射出されたドロップレット201にパルスレーザ光L1が照射されると、生成されたEUV光L2がIFに集光された後、露光装置に導かれる。
【0064】
リカバリ制御部301は、ドロップレット201のプラズマ生成点202における位置精度が所定範囲内に収まっているか否かを判定する(S261)。ドロップレット201の位置精度が所定範囲内に収まっている場合(S261:YES)、リカバリ制御部301は、通常モードを維持する(S262)。ターゲット供給部120から射出されたドロップレット201は、プラズマ生成点202に略正確に到着しているためである。
【0065】
ドロップレット201の位置精度が所定範囲内に収まっていない場合(S261:NO)、リカバリ制御部301は、通常モードからリカバリ制御処理に移行する(S263)。リカバリ制御処理に移行する際、リカバリフラグを設定する。これにより、図4に示すS21からの処理が実行される。上述の通り、適切なタイミングでターゲット供給部120の機能を回復させるためのリカバリ動作が実行される。なお、図示しないが、リカバリモードによっても機能の回復が行われない場合は、警報や通信により外部へ知らせることができる。
【0066】
このように構成される本実施形態によれば、リカバリ動作を自動的に実行できるため、オペレータがドロップレットの射出状態を常時監視する必要がなく、メンテナンス効率が向上する。
【0067】
さらに、本実施形態では、ターゲット供給部120を完全停止させることなく、一時的にリカバリ動作を実施することにより、ターゲット供給部120を正常状態に回復させる。従って、ターゲット供給部120のメンテナンス時間を短縮することができ、稼働率を向上できる。その結果、露光作業の作業効率も高めることができる。
【0068】
さらに、本実施形態では、下流工程(露光作業)の状況を考慮して、ターゲット供給部120のリカバリを行うため、装置の使い勝手が向上する。
【実施形態2】
【0069】
図6を参照して第2実施形態を説明する。以下に述べる各実施形態は、第1実施形態の変形例に相当する。従って、第1実施形態との相違点を中心に説明する。本実施形態では、リカバリ部400の具体例を説明する。
【0070】
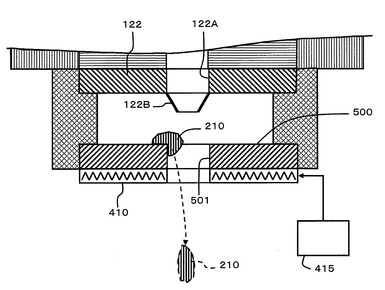
図6は、ターゲット供給部120の先端側を拡大して示す説明図である。中間構造物500は、ノズル部122に対向して設けられている。中間構造物500の具体例は、図2に示す電極部123である。中間構造物500としては、ターゲット物質200をノズル部122から引き出すための電極部123に限定されない。
【0071】
ノズル部122とプラズマ生成点202との間に存在する構造物であって、ドロップレット201に起因する異物210が付着する可能性のある構造物は、中間構造物500である。ドロップレット201は帯電しているので、電界又は磁界によって移動経路や速度を変えることができる。このため適切な位置に中間構造物500を配することによってドロップレット201の運動を制御することが可能となる。電極部123以外の中間構造物500としては、例えば、ドロップレット201の移動経路を修正するための静電レンズ、ドロップレット201の速度を上げるための加速用電極等を挙げることができる。また、これに限定されず永久磁石や電磁コイル等を用いてドロップレット201の移動経路を修正してもよい。永久磁石や電磁コイルも中間構造物500に含まれる。
【0072】
リカバリ部400の一例としてのヒータ410は、中間構造物500の下面に設けられる。ヒータ410は、例えば、環状の中間構造物500の下面を覆うように、環状に形成される。ヒータ410は、中間構造物500に付着した異物210を加熱し、溶融させる。異物210は、一つのドロップレット201の全部又は一部が中間構造物500に付着することにより、形成される。従って、ヒータ410は、リカバリ制御部301が出力する信号をヒータ電源415が受信し、ヒータ電源415からヒータ410に電力が供給されることによって、ターゲット物質200の融点を超える温度で発熱する。なお、ヒータ410には図示しない温度センサが設けられてもよい。
【0073】
ヒータ410からの熱により溶融した異物210は、重力に従って中間構造物500から流れ落ちる。溶けた異物210は、例えば、中間構造物500の中央に形成される開口部501を介して、落下する。その開口部501は、ドロップレット201が通過するために設けられたものである。
【0074】
なお、中間構造物500から除去される異物210が、ターゲット供給部120の下側に配置されている部品(例えば、コレクタミラー130)に付着するのを防止するために、後述の実施形態では、除去された異物210を捕獲するための構成又は異物210からコレクタミラー130を保護するための構成を設けている。
【0075】
このように構成される本実施形態は、第1実施形態と同様の効果を奏する。さらに、本実施形態は、ヒータ410の熱によって、中間構造物500に付着した異物210を溶かして取り除く。従って、中間構造物500に付着した異物210により、ドロップレット201の移動経路が逸れるのを防止でき、ドロップレット201の位置精度を高めることができる。
【実施形態3】
【0076】
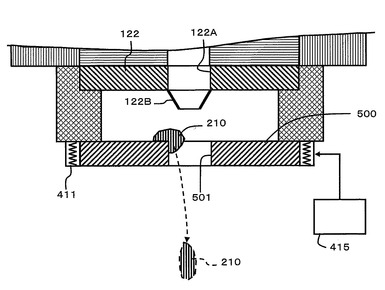
図7を参照して第3実施形態を説明する。第3実施形態では、リカバリ部400の一例としてのヒータ411を、中間構造物500の外周面に設けている。ヒータ411は、環状の中間構造物500の外周面を覆うように、短い筒状に形成される。
【0077】
図7は、ターゲット供給部120の先端側を拡大して示す説明図である。第2実施形態と同様に、ヒータ411は、中間構造物500を加熱することにより、中間構造物500の表面に付着した異物210を溶融状態にし、落下させて取り除く。このように構成される本実施形態も第2実施形態と同様の効果を奏する。
【実施形態4】
【0078】
図8を参照して第4実施形態を説明する。図8は、ターゲット供給部120の先端側を拡大して示す説明図である。本実施形態では、第2実施形態とは逆に、環状のヒータ412を中間構造物500の上面に設ける。このように構成される本実施形態も第2実施形態と同様の効果を奏する。
【実施形態5】
【0079】
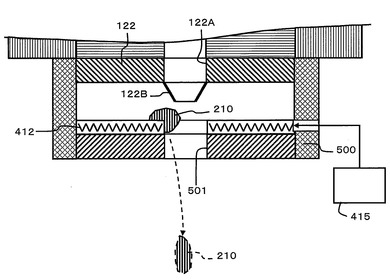
図9,図10を参照して第5実施形態を説明する。本実施形態は、収容部121Bに収容されているターゲット物質200を用いて中間構造物500を加熱することにより、中間構造物500に付着した異物210を除去する。
【0080】
図9は、ターゲット供給部120の先端側を拡大して示す説明図である。中間構造物500の外周面を取り囲むようにして、環状の加熱パイプ413が設けられている。リカバリ部400の一例としての加熱パイプ413内部には、ターゲット供給部120内に蓄積されている溶融状態のターゲット物質200が供給される。
【0081】
加熱パイプ413内を流れるターゲット物質200からの伝導熱により、中間構造物500の全体が加熱される。これにより、中間構造物500に付着した異物210が溶けて落下する。
【0082】
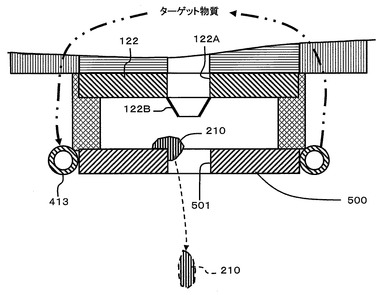
図10は、第5実施形態の変形例に該当する。図10に示すように、加熱パイプ413を、絶縁部124の外周を覆うようにして設けてもよい。収容部121Bには、ターゲット物質200が流出する流出口121D(1)と、ターゲット物質200が流入する流入口121D(2)とが設けられている。加熱パイプ413は、流路413Aと流入口121D(1)及び流出口121D(2)を介して、収容部121Bに接続されている。流路413Aにはポンプ413Bが設けられている。なお、流路413Aの途中に、ターゲット物質200内の不純物を除去するためのフィルタ装置を設けてもよい。
【0083】
加熱パイプ413には、収容部121B内のターゲット物質200が、流出口121D(1)及び流路413Aを介して流入する。加熱パイプ413を流れるターゲット物質200は、絶縁部124を介して中間構造物500を加熱する。
【0084】
中間構造物500を加熱したターゲット物質200は、加熱パイプ413から、流路413Aとポンプ413B及び流入口121D(2)を介して、収容部121B内に戻される。収容部121Bに戻されたターゲット物質200は、加熱部125により加熱される。このように構成される本実施形態も上述実施形態と同様の効果を奏する。
【実施形態6】
【0085】
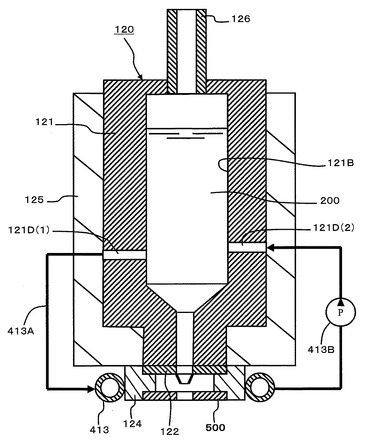
図11を参照して第6実施形態を説明する。本実施形態では、電磁波源414を用いて中間構造物500を加熱し、中間構造物500に付着した異物210を取り除く。図11は、ターゲット供給部120の先端側を拡大して示す説明図である。
【0086】
リカバリ部400の一例としての電磁波源414は、例えば、赤外線レーザ光線又はマイクロ波等の電磁波を出力する。電磁波源414から出力される電磁波は、中間構造物500に照射され、中間構造物500を加熱する。
【0087】
電磁波がよく吸収されるように、中間構造物500の表面粗さを設定してもよい。又は、電磁波を吸収し易い物質で、中間構造物500の全部又は一部(電磁波の照射される部分)をコーティングする構成でもよい。さらに、電磁波を異物210に直接照射する構成でもよい。このように構成される本実施形態も上述の実施形態と同様の効果を奏する。
【実施形態7】
【0088】
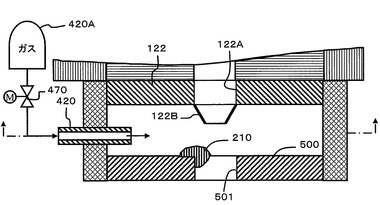
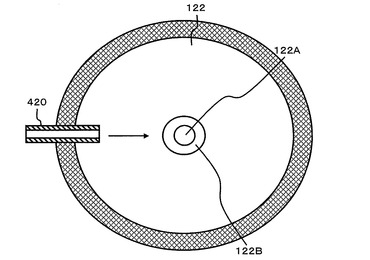
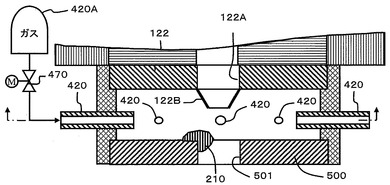
図12A及び12Bを参照して第7実施形態を説明する。本実施形態では、アルゴンガス等の不活性ガスを用いて、中間構造物500に付着した異物210を吹き飛ばして、取り除く。図12Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図12Bは、ノズル部120及びガスパイプ420の断面図である。
【0089】
図12Aに示すように、中間構造物500とノズル部122との間に、リカバリ部400の一例としてのガスパイプ420の先端が設けられている。ガスパイプ420を介して、アルゴンガス等の不活性ガスを蓄積するガス源420Aからのガスを、バルブ470を開くことでノズル部120と中間構造物500との間に吹き付けて、異物210を除去する。バルブ470はリカバリ制御部301からの信号によって開閉可能である。なお、本実施の形態ではバルブ470は電磁弁として説明しているが、空圧で動作するバルブでもよい。
【0090】
このように構成される本実施形態も第1実施形態と同様の効果を奏する。本実施形態では、ガスを異物210に吹き付けて除去するため、中間構造物500を加熱する必要がない。但し、中間構造物500を加熱して異物210を溶融状態にしておけば、より簡単に異物210を除去することができる。
【実施形態8】
【0091】
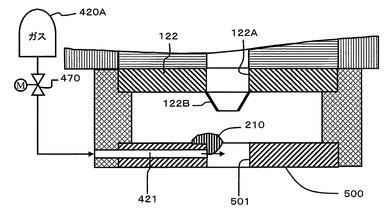
図13を参照して第8実施形態を説明する。本実施形態では、中間構造物500の内部に、リカバリ部400の一例としてのガス流路421を設ける。図13は、ターゲット供給部120の先端側を拡大して示す説明図である。
【0092】
中間構造物500には、その半径方向にガス流路421が形成されている。ガス流路421の一端側はガス源420Aに接続されている。ガス流路421の他端側は、中間構造物500の中央部に形成された穴501に連通している。
【0093】
ガス流路421から穴501に向けて噴出される不活性ガスは、穴501の周辺に付着している異物210を吹き飛ばして除去する。このように構成される本実施形態も第7実施形態と同様の効果を奏する。
【実施形態9】
【0094】
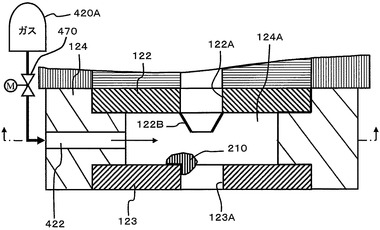
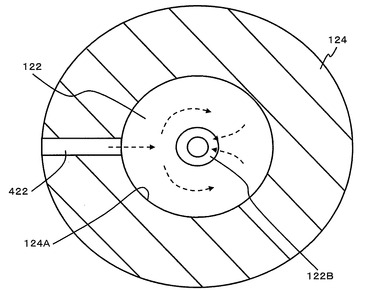
図14A及び14Bを参照して第9実施形態を説明する。本実施形態では、絶縁部124に、リカバリ部400の一例としてのガス流路422を設ける。図14Aは、ターゲット供給部120の先端側の拡大図である。図14Bは、絶縁部124及びガス流路422の断面図である。
【0095】
筒状の絶縁部124には、その半径方向にガス流路422が形成されている。ガス流路422の一端側はガス源420Aに接続されており、ガス流路422の他端側はノズル部122と電極部123との間の空間124Aに連通している。
【0096】
ガス流路422から空間124A内に噴出される不活性ガスは、空間124A内を旋回して、空間124A内の異物210を吹き飛ばす。吹き飛ばされた異物210は、射出孔123Aから外部に排出される。このように構成される本実施形態も第7実施形態と同様の効果を奏する。
【実施形態10】
【0097】
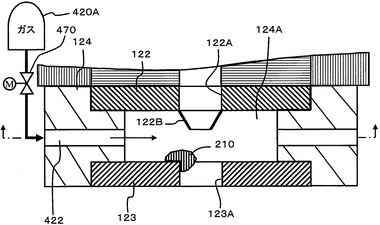
図15を参照して第10実施形態を説明する。本実施形態では、ターゲット供給部120の本体部121側に、リカバリ部の一例としてのガス流路423を設けている。図15は、ターゲット供給部120の断面図である。
【0098】
ガス流路423は、例えば、加熱部125と本体部121とを貫通するように、ターゲット供給部120に設けられる。ガス流路423の一端側はガス源420Aに接続されており、ガス流路423の他端側は、ノズル部122と電極部123との間の空間124A内に連通している。
【0099】
ガス流路423の他端側は、電極部123の射出孔123A付近に向けて、設けられている。ガス流路423から噴出される不活性ガスは、射出孔123A付近に付着した異物210及び空間124A内の異物210を吹き飛ばす。吹き飛ばされた異物210は、射出孔123Aから外部に排出される。本実施形態も第7実施形態と同様の効果を奏する。
【実施形態11】
【0100】
図16A及び16Bを参照して第11実施形態を説明する。本実施形態は、図12A及び12Bに示す第7実施形態を前提にしており、ガスパイプ420を複数配置している。図16Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図16Bは、ノズル部122及びガスパイプ420の断面図である。
【0101】
図16Bに示すように、ノズル122Bの周囲を取り囲むようにして(換言すれば、中間構造物500の穴501の周囲を取り囲むようにして)、複数のガスパイプ420が周方向に等間隔に離間して配置されている。
【0102】
各ガスパイプ420は、それぞれガス源420Aに接続されている。各ガスパイプ420から噴出される不活性ガスにより、中間構造物500に付着している異物210が吹き飛ばされて除去される。なお、各ガスパイプ420から不活性ガスを噴出させるタイミングを、それぞれ異ならせることもできる。例えば、あるガスパイプ420を起点にして、時計回り又は反時計回りの順番で、ガスパイプ420から次々に不活性ガスを噴出させる構成でもよい。このように構成される本実施形態も第7実施形態と同様の効果を奏する。本実施形態では、不活性ガスを複数のガスパイプ420から噴出させることができるため、異物210を除去する能力を第7実施形態よりも高めることができる。
【実施形態12】
【0103】
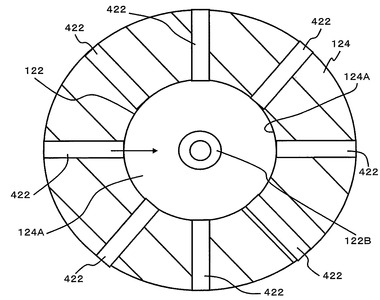
図17A及び17Bを参照して第12実施形態を説明する。本実施形態は、図14A及び14Bに示す第9実施形態を前提にしている。本実施形態では、筒状の絶縁部124に、複数のガス流路422を周方向に等間隔に離間させて設けている。図17Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図17Bは、絶縁部124及びガス流路422の断面図である。
【0104】
各ガス流路422の一端側はガス源420Aに接続されており、各ガス流路422の他端側は空間124Aに連通している。各ガス流路422から空間124A内に向けて噴出される不活性ガスにより、空間124A内の異物210は吹き飛ばされて、射出孔123Aから外部に排出される。なお、各ガス流路422から不活性ガスを噴出させるタイミングは、共通に設定してもよいし、異ならせることもできる。このように構成される本実施形態も第7実施形態と同様の効果を奏する。本実施形態では、複数のガス流路422から不活性ガスを噴出させることができるため、異物210を除去する能力を第9実施形態よりも高めることができる。
【0105】
なお、図15に示す第10実施形態においても、第12実施形態と同様に、複数のガス流路423を設けることができることは、いわゆる当業者であれば容易に理解できるであろう。
【実施形態13】
【0106】
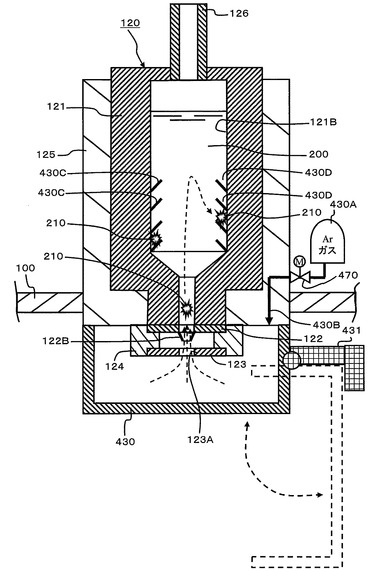
図18を参照して第13実施形態を説明する。本実施形態は、ノズル部122の外部からノズル部122内に不活性ガスを注入することにより、ノズル部122内の異物210を除去する。図18は、ターゲット供給部120の断面図である。
【0107】
カバー430は、ノズル部122等を気密に覆うことができるようにして設けられている。カバー430は、開閉機構431によって開閉可能に取り付けられる。開閉機構431は、カバー430でノズル部122等を覆ったり、又は、ノズル部122等からカバー430を開放したりする。開閉機構431は、例えば、モータ又はシリンダ及びリンク機構等から構成できる。
【0108】
ガス源430Aとカバー430の内部とは、ガス流路430Bを介して接続されている。本体部121の内壁には、異物210を捕獲するためのトラップ430Cが複数設けられている。各トラップ430Cは、例えば、テーパー状のリングとして構成されている。各トラップ430Cは、トラップ430Cと本体部121の内壁との間に、上方に開口する空間430Dが形成されるようにして取り付けられる。
【0109】
本実施形態では、カバー430と、ガス源430Aと、ガス流路430Bと、トラップ430Cと、開閉機構431とから、リカバリ部400が構成される。
【0110】
リカバリモードでは、開閉機構431を動作させてカバー430でノズル部122等を気密に覆った後で、ガス源430Aから不活性ガスをカバー430内の空間に送り込む。この時、カバー430内のガス圧力を、収容部121B内の圧力よりも高くすることが必要である。カバー430内に注入された不活性ガスは、ノズル部122等を介して収容部121B内に流入する。その際、ノズル部122内の異物210は、収容部121B内に押し込まれる。
【0111】
収容部121B内に押し込まれた複数の異物210のうち少なくとも一部は、ターゲット物質200内を浮遊しながら、複数のトラップ430Cのいずれかに捕獲され、空間430D内に収容される。
【0112】
このように構成される本実施形態も第1実施形態と同様の効果を奏する。本実施形態では、カバー430の内部に外部から不活性ガスを注入することにより、ノズル部122内の異物210を収容部121B内に押し戻すことができる。さらに、収容部121B内に押し戻された異物210の少なくとも一部を、複数のトラップ430Cのいずれかで捕獲することができる。従って、タノズル部122内から異物210を除去して、ターゲット供給部120の機能を正常に回復させることができる。ここでのリカバリ対象の機能とは、主に、ドロップレット201をプラズマ生成点202に正確に送り出す機能である。
【実施形態14】
【0113】
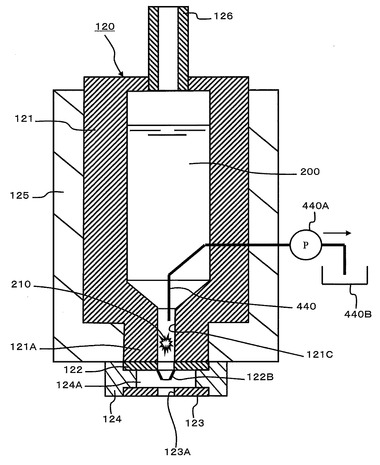
図19を参照して第14実施形態を説明する。本実施形態では、ノズル部122内の異物210を外部に吸い出すようになっている。図19は、ターゲット供給部120の断面図である。
【0114】
ターゲット供給部120には、吸引管440が設けられている。吸引管440の一端側は、先端部121A内の射出流路部121Cに向けて延びている。吸引管440の他端側には、吸引ポンプ440Aが設けられている。さらに、吸引管440により吸引される異物210及びターゲット物質200を回収するための回収槽440Bが設けられる。本実施形態では、吸引管440と、吸引ポンプ440A及び回収槽440Bとにより、リカバリ部400が構成される。
【0115】
吸引ポンプ440Aを作動させると、吸引ポンプ440Aとターゲット供給部120の間にある図示しないバルブが開となり、ターゲット供給部120の先端側に滞留している異物210及びターゲット物質200は、吸引管440の先端から吸い込まれ、回収槽440Bに吐出される。回収されたターゲット物質200は、異物210を除去して再使用することもできる。
【0116】
このように構成される本実施形態では、ターゲット供給部120内の異物210を吸引して除去するため、第1実施形態と同様に、ターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態15】
【0117】
図20A及び20Bを参照して第15実施形態を説明する。図20A及び20Bはノズル部122を拡大して示す断面図である。本実施形態では、ノズル部122に振動を与えることにより、ノズル部122内に滞留している異物210を破砕して、外部に排出させる。図20A及び20Bでは、便宜上、絶縁部124及び電極部123が省略されている。
【0118】
リカバリ部400の一例としての振動体450は、ノズル122Bの外周側に設けられている。振動体450は、高周波電源450Aからの電圧に従って、振動する。図20Aに示すように、振動体450が振動すると、異物210は、振動により細かく破砕される。図20Bに示すように、細かく分解された異物210は、ノズル122Bの外部に排出される。
【0119】
このように構成される本実施形態でも、ターゲット供給部120を自動的にメンテナンスすることができ、第1実施形態と同様の効果を奏する。
【実施形態16】
【0120】
図21A及び21Bを参照して第16実施形態を説明する。本実施形態では、ノズル部122を加熱することにより、ノズル部122内に滞留している異物210を溶融させて排出させる。図21A及び21Bは、ノズル部122を拡大して示す断面図である。ノズル122Bの外周側には、リカバリ部400の一例としてのヒータ460が設けられている。
【0121】
図21Aに示すように、ヒータ460は、ヒータ電源460Aから供給される電力を利用して発熱する。ヒータ460は、異物210が溶融する程度の温度に加熱される。図21Bに示すように、溶融された異物は、ノズル122Bから外部に排出される。このように構成される本実施形態も第15実施形態と同様の効果を奏する。
【実施形態17】
【0122】
図22A及び22Bを参照して第17実施形態を説明する。本実施形態では、中間構造物510の少なくとも表面を、ターゲット物質200が付着しにくい材料から形成する。図22A及び22Bは、ターゲット供給部120の先端側を拡大して示す説明図である。
【0123】
中間構造物510の表面は、ターゲット物質200に対して濡れ性の悪い材料(ターゲット物質に対して接触角の大きい材料)でコーティングされている。中間構造物510の全体を、ターゲット物質200に対して濡れ性の悪い材料から形成してもよい。ターゲット物質200が錫の場合、濡れ性の悪い材料としては、例えば、モリブデン、タンタル、アルミナセラミックス等を挙げることができる。あるいは、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステン等を主成分とするセラミックスから構成してもよい。
【0124】
図22Aに示すように、中間構造物510を皿状に形成することができる。ノズル122Bから吐出されたドロップレット201の全部又は一部が、中間構造部510の上側の表面に付着して異物210となる場合がある。その異物210は、中間構造物510の表面を滑り、穴501から流れ落ちる。
【0125】
図22Bに示すように、中間構造物511を、伏せた皿状に形成してもよい。この場合、中間構造物511の表面に付着した異物210は、中間構造物511の外縁に向けて滑り、中間構造物511の外縁から流れ落ちる。穴501近傍に付着した異物210は、穴501から下に流れ落ちる。
【0126】
このように構成される本実施形態は、本開示の他の実施形態と組み合わせてターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態18】
【0127】
図23Aから23Cを参照して第18実施形態を説明する。本実施形態では、リカバリモード時に、ノズル部122内の異物210を外部に排出させる。
【0128】
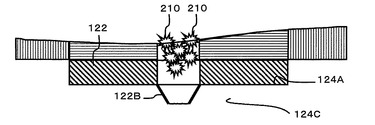
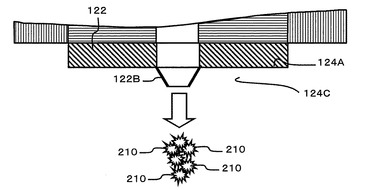
図23Aから23Cは、ノズル部122から異物210を外部に押し出す方法を示す説明図である。図23Aに示すように、ノズル部122の近傍には、異物210が滞留している。そこで、図23Bに示すように、ノズル部122内の圧力を一時的に高める。これにより、図23Cに示すように、ノズル部122に滞留していた異物210が外部に押し出される。
【0129】
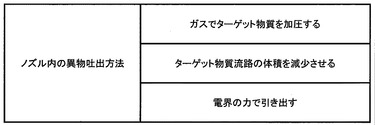
ノズル部122内の異物を外部に排出させる方法としては、幾つか考えられる。第1の方法は、収容部121B内に加えるガス圧力(背圧)を高めることにより、ノズル部122内の圧力を高くして異物210を排出させる方法である。第2の方法は、弾性変形の範囲内でノズル部122を含むターゲット物質流路を構成する部材を変形させて、ターゲット物質流路の体積を減少させることにより、ノズル部122内の圧力を高めて、異物210を排出させる方法である。第3の方法は、電極部123のような引き出し用電極を設け、静電吸引力により異物210を排出させる方法である。上記の各方法を組み合わせて用いてもよい。
【0130】
このように構成される本実施形態でも、ターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態19】
【0131】
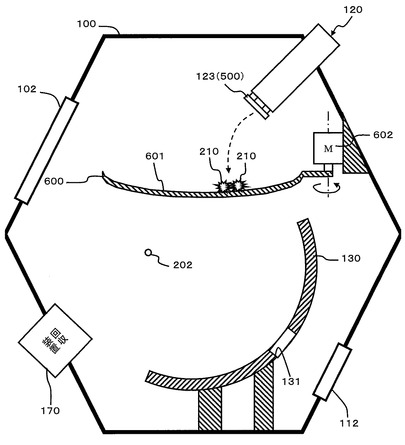
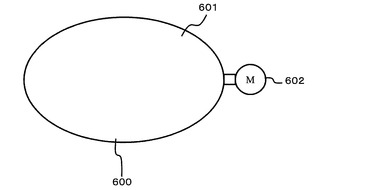
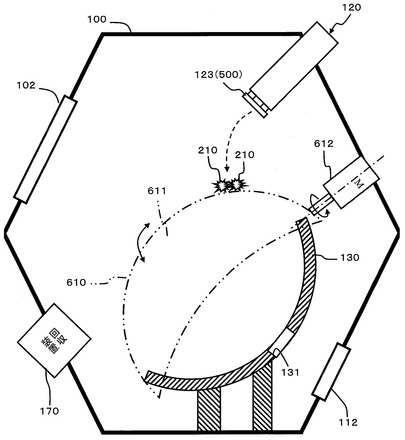
図24から図25Bを参照して第19実施形態を説明する。本実施形態では、ターゲット供給部120から除去される異物210を捕獲するための捕獲部600を設ける。図24は、ターゲット供給部120と捕獲部600とコレクタミラー130との関係を模式的に示す説明図である。図25A及び25Bは、捕獲部600の位置を切り替える様子を示す説明図である。なお、図24中の回収装置170は、通常モード時においてターゲット供給部120から射出されるドロップレット201のうち、レーザ光の照射されなかったドロップレット201を回収するための装置である。
【0132】
図24に示すように、ターゲット供給部120とコレクタミラー130との間には、捕獲部600が設けられている。捕獲部600は、ターゲット供給部120から取り除かれて落下する異物210を受け止めて、コレクタミラー130に異物210が付着するのを防止する。
【0133】
捕獲部600は、例えば、シャッタ601と、シャッタ601を回転させるためのモータ602とを備える。シャッタ601は、平板状に形成してもよいし、中央部が窪んだ皿状に形成してもよい。皿状に形成した場合は、シャッタ601に収容された異物210が、シャッタ601の回転時に発生する遠心力で周囲に飛散するのを、より効果的に防止できる。
【0134】
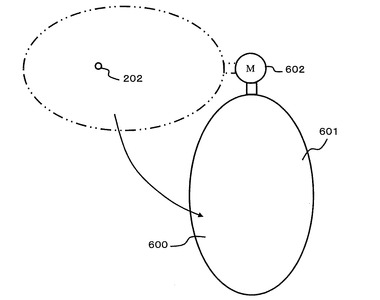
図25Aは、リカバリモード時におけるシャッタ601の位置を示す。この位置を第1位置、又は、捕獲位置と呼ぶ。シャッタ601が第1位置にある場合、ターゲット供給部120から取り除かれた異物210は、シャッタ601により捕獲される。従って、コレクタミラー130に異物210が付着することを防止できる。
【0135】
図25Bは、通常モード時におけるシャッタ601の位置を示す。この位置を第2位置、又は、通常位置と呼ぶ。シャッタ601が第2位置にある場合、ターゲット供給部120から射出されたドロップレット201は、プラズマ生成点202に向けて移動することができる。従って、シャッタ601が第2位置にある場合、ターゲット供給部120によるドロップレット201の軌道は遮断されず、プラズマ生成点202においてEUV光が発生する。
【0136】
このように構成される本実施形態は、ターゲット供給部120から除去される異物210がコレクタミラー130に付着するのを防止できる。従って、異物210を除去する前記各実施形態と好適に組み合わせて、メンテナンス作業の効率を高めることができ、装置の使い勝手が向上する。
【実施形態20】
【0137】
図26を参照して第20実施形態を説明する。本実施形態では、コレクタミラー130の表面を保護するためのミラー保護部610を設ける。図26は、ターゲット供給部120とミラー保護部610とコレクタミラー130との関係を模式的に示す説明図である。
【0138】
ミラー保護部610は、ドーム形状のシャッタ611と、シャッタ611を回動させるためのモータ612とを備える。通常モード時では、シャッタ611は、EUV光路を遮らない位置で待機している。シャッタ611は、プラズマの生成、EUV光の発生、EUV光の集光に何ら悪影響を与えない位置で待機する。
【0139】
リカバリモード時になると、モータ612は、シャッタ611をコレクタミラー130の反射面を覆う位置まで移動させる。これにより、シャッタ611は、コレクタミラー130とターゲット供給部120との間を遮断し、ターゲット供給部120から除去される異物210からコレクタミラー130を保護する。このように構成される本実施形態は、第19実施形態と同様の効果を奏する。
【実施形態21】
【0140】
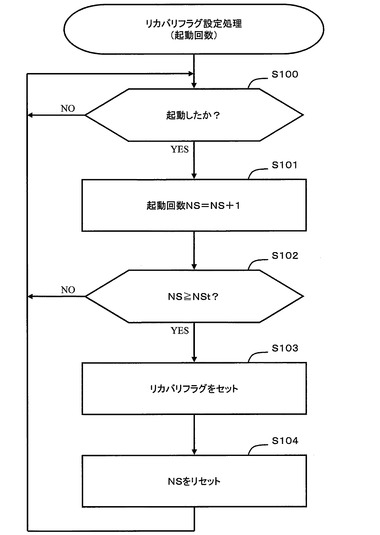
図27のフローチャートを参照して第21実施形態を説明する。本実施形態を含む以下の各実施形態は、図3で述べたリカバリフラグ設定処理の具体例である。
【0141】
リカバリ制御部301は、ターゲット供給部120が起動した場合(S100:YES)、起動回数を積算するカウンタNSの値を1つ増加させる(NS=NS+1,S101)。続いて、リカバリ制御部301は、起動回数NSが所定の閾値NStに達したか否かを判定する(NS≧NSt,S102)。
【0142】
起動回数NSが閾値NStに達した場合(S102:YES)、リカバリ制御部301は、リカバリフラグを設定し(S103)、起動回数NSをリセットする(S104)。
【0143】
このように、ターゲット供給部120が所定回数NStだけ起動された場合にリカバリフラグを設定して、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態22】
【0144】
図28のフローチャートを参照して第22実施形態を説明する。リカバリ制御部301は、タイマを備え、前回のリカバリ動作の実行時(メンテナンス作業の実行時)からの経過時間Trを計測している(S110)。リカバリ制御部301は、経過時間Trが所定の経過時間Trtに達したか否かを判定する(Tr≧Trt,S111)。
【0145】
前回のリカバリ動作実行時からの経過時間Trが所定の経過時間Trtに達した場合(S111:YES)、リカバリ制御部301は、リカバリフラグを設定し(S112)、経過時間Trをリセットする(S113)。
【0146】
このように、前回のリカバリ動作実行時からの経過時間Trが所定の経過時間Trtに達した場合にリカバリフラグを設定して、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態23】
【0147】
図29のフローチャートを参照して第23実施形態を説明する。リカバリ制御部301は、ターゲット供給部120によるドロップレット201の出力(射出)を監視する(S120)。ターゲット供給部120からドロップレット201が出力されると(S120:YES)、リカバリ制御部301は、出力回数を積算するためのカウンタDPNの値を1つ増加させる(DPN=DPN+1,S121)。
【0148】
リカバリ制御部301は、ドロップレット出力回数DPNが所定の出力回数DPNtに達したか否かを判定する(DPN≧DPNt,S122)。ドロップレット出力回数は、たとえば、図1におけるパルス制御部320の出力パルスと、位置検出センサ340による検出信号とが両方検出された回数として計測してもよい。ドロップレット出力回数DPNが所定の出力回数DPNtに達した場合(S122:YES)、リカバリ制御部301は、リカバリフラグを設定し(S123)、ドロップレット出力回数DPNをリセットする(S124)。
【0149】
このように、ターゲット供給部120から出力されるドロップレット201の数DPNが所定の回数DPNtに達した場合に、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態24】
【0150】
図30のフローチャートを参照して第24実施形態を説明する。リカバリ制御部301は、位置計測部302を介してドロップレット201の位置を計測する(S130)。リカバリ制御部301は、ドロップレット201の位置精度が所定範囲内にあるか否かを判定する(S131)。さらにドロップレットコントローラ310の射出指示によりドロップレット201が射出されているか否かを判定してもよい。
【0151】
リカバリ制御部301は、ドロップレット201の位置精度が所定範囲内に収まっていない場合(S131:NO)、リカバリフラグを設定する(S132)。S131においてNOと判定する条件は、ドロップレットコントローラ310の射出指示が出ているにも拘らずドロップレット201が検出されない場合であってもよい。このように、ターゲット供給部120から出力されるドロップレット201の位置が不安定になった場合やドロップレットが射出されない場合に、ターゲット供給部120を自動的にメンテナンスすることができる。
【0152】
なお、本開示は、上述した各実施形態に限定されない。いわゆる当業者であれば、本開示の範囲内で、種々の追加や変更等を行うことができる。例えば、上記各実施形態を適宜組み合わせることができる。
【0153】
例えば、異物を加熱する実施形態(第2実施形態、第3実施形態、第4実施形態、第5実施形態、第6実施形態)と、異物に不活性ガスを吹き付ける実施形態(第7実施形態、第8実施形態、第9実施形態、第10実施形態、第11実施形態、第12実施形態)とは、適宜組み合わせることができる。異物を加熱して流動性を上げた状態で不活性ガスを吹き付ける方が、異物を除去し易いためである。
【0154】
さらに、ノズルの外部から不活性ガスを注入する第13実施形態、又は、ノズル内の異物を吸引する第14実施形態において、異物を加熱する構成を加えてもよい。
【0155】
さらに、第1−16実施形態と、ターゲット物質に対する濡れ性の悪い材料を用いる第17実施形態とを組み合わせることにより、付着した異物をより効果的に除去できる。
【0156】
さらに、第1−18実施形態と、異物捕獲部に関する第19実施形態又はミラー保護部に関する第20実施形態とを組み合わせることにより、ターゲット供給部から除去された異物がコレクタミラーに付着するのを防止できる。
【0157】
上記の説明は、制限ではなく単なる例示を意図したものである。従って、添付の特許請求の範囲を逸脱することなく本開示の実施形態に変更を加えることができることは、当業者には明らかであろう。本明細書及び添付の特許請求の範囲全体で使用される用語は、「限定的ではない」用語と解釈されるべきである。例えば、「含む」又は「含まれる」という用語は、「含まれるものとして記載されたものに限定されない」と解釈されるべきである。「有する」という用語は、「有するものとして記載されたものに限定されない」と解釈されるべきである。また、本明細書、及び添付の特許請求の範囲に記載される修飾句「1つの」は、「少なくとも1つ」又は「1又はそれ以上」を意味すると解釈されるべきである。
【符号の説明】
【0158】
1:極端紫外光源装置、100:チャンバ、110:ドライバレーザ光源、120:ターゲット供給部、130:コレクタミラー、300:EUV光源コントローラ、301:リカバリ制御部、302:位置制御部、400:リカバリ部。
【技術分野】
【0001】
本発明は、極端紫外光源装置、極端紫外光源装置の制御方法及びターゲット供給装置に関する。
【背景技術】
【0002】
13.5nmという極端に波長の短い光と縮小光学系とを使用する、半導体露光技術が研究されている。この技術は、EUVL(Extreme Ultra Violet Lithography:極端紫外線露光)と呼ばれる。以下、極端紫外光をEUV光と呼ぶ。
【0003】
EUV光源としては、例えば、LPP(Laser Produced Plasma:レーザ生成プラズマ)式の光源が知られている。LPP式光源とは、ターゲット物質にレーザ光を照射してプラズマを生成し、このプラズマから放射されるEUV光を利用する光源である。LPP式光源は、プラズマ密度を高くすることができ、かつ、捕集立体角を大きくできるため、高出力のEUV光を得られる可能性が高い。
【0004】
LPP式のEUV光源装置では、ターゲット物質として錫(Sn)が用いられる。ターゲット物質は、ターゲット供給部から、ドロップレット状のターゲット物質としてチャンバ内に射出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2006/0192154号明細書
【特許文献2】米国特許出願公開第2006/0192155号明細書
【特許文献3】米国特許第7449703号明細書
【概要】
【0006】
本開示の1つの実施形態に従うチャンバ装置は、レーザ光源と共に用いられるチャンバ装置であって、前記レーザ光源から出力されるレーザ光を内部に導入するための少なくとも1つの入射口が設けられたチャンバと、前記チャンバに設けられ、前記チャンバ内の所定の位置にターゲット物質を供給するターゲット供給部と、所定条件が成立した場合に、前記タ―ゲット供給部に対してリカバリ動作の実行を指示するリカバリ制御部と、前記リカバリ制御部からの指示に応じて前記リカバリ動作を実行するリカバリ部と、前記ターゲット供給部から前記チャンバ内に供給されるターゲット物質の位置を計測する位置計測部と、を備えてもよい。
【0007】
本開示の他の実施形態に従うターゲット供給部のメンテナンス方法は、チャンバ、ターゲット供給部、リカバリ制御部、リカバリ部および位置計測部を備えるチャンバ装置において、前記タ―ゲット供給部をメンテナンスする方法であって、前記ターゲット供給部に対してリカバリ動作を実行するか否かの判定用情報を取得することと、前記リカバリ動作を実行すると判定された際に、前記リカバリ動作が実行可能なタイミングであるか否かを判定することと、前記リカバリ動作が実行可能なタイミングであると判定された際に、前記リカバリ制御部が前記リカバリ部に前記リカバリ動作を指示することと、前記リカバリ部が、前記リカバリ制御部の指示に応じて、所定のリカバリ動作を実行することと、を含んでもよい。
【図面の簡単な説明】
【0008】
【図1】第1実施形態に係るEUV光源装置の構成図である。
【図2】ターゲット供給部を拡大して示す図である。
【図3】リカバリフラグを設定する処理のフローチャートである。
【図4】リカバリ制御処理を示すフローチャートである。
【図5】図4中の通常モードの処理を示すフローチャートである。
【図6】第2実施形態に係り、異物を除去する様子を示す模式図である。
【図7】第3実施形態に係り、異物を除去する様子を示す模式図である。
【図8】第4実施形態に係り、異物を除去する様子を示す模式図である。
【図9】第5実施形態に係り、異物を除去する様子を示す模式図である。
【図10】ターゲット供給部の拡大図である。
【図11】第6実施形態に係り、異物を除去する様子を示す模式図である。
【図12A】第7実施形態に係り、異物を除去する様子を示す模式図である。
【図12B】第7実施形態に係り、ノズル部及びガスパイプの断面図である。
【図13】第8実施形態に係り、異物を除去する様子を示す模式図である。
【図14A】第9実施形態に係り、異物を除去する様子を示す模式図である。
【図14B】第9実施形態に係り、絶縁部及びガス流路の断面図である。
【図15】第10実施形態に係るターゲット供給部の断面図である。
【図16A】第11実施形態に係り、異物を除去する様子を示す模式図である。
【図16B】第11実施形態に係り、ノズル部及びガスパイプの断面図である。
【図17A】第12実施形態に係り、異物を除去する様子を示す模式図である。
【図17B】第12実施形態に係り、絶縁部及びガス流路の断面図である。
【図18】第13実施形態に係り、異物を除去する様子を示す模式図である。
【図19】第14実施形態に係るターゲット供給部の断面図である。
【図20A】第15実施形態に係り、異物を除去する様子を示す模式図である。
【図20B】第15実施形態に係り、異物を除去する様子を示す模式図である。
【図21A】第16実施形態に係り、異物を除去する様子を示す模式図である。
【図21B】第16実施形態に係り、異物を除去する様子を示す模式図である。
【図22A】第17実施形態に係り、異物を除去する様子を示す模式図である。
【図22B】第17実施形態に係り、異物を除去する様子を示す模式図である。
【図23A】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図23B】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図23C】第18実施形態に係り、異物を除去する様子を示す模式図である。
【図24】第19実施形態に係り、コレクタミラーを異物から保護する様子を示す説明図である。
【図25A】保護カバーの位置の切替を示す説明図である。
【図25B】保護カバーの位置の切替を示す説明図である。
【図26】第20実施形態に係り、コレクタミラーを異物から保護する様子を示す説明図である。
【図27】リカバリフラグを設定する処理のフローチャートである。
【図28】リカバリフラグを設定する他の処理のフローチャートである。
【図29】リカバリフラグを設定するさらに他の処理のフローチャートである。
【図30】リカバリフラグを設定するさらに別の処理のフローチャートである。
【実施の形態】
【0009】
以下、本開示の実施形態について、図面を参照しながら詳しく説明する。以下に説明される実施形態は、本開示の一例を示すものであって、本開示の内容を限定するものではない。また、各実施形態で説明される構成及び動作の全てが本開示の構成及び動作として必須であるとは限らない。なお、実施形態の間で共通する構成要素については重複する説明を省略する。
【実施形態1】
【0010】
図1−図5に基づいて第1実施形態を説明する。図1は、EUV光源装置1の全体構成を示す説明図である。EUV光源装置1は、例えば、真空チャンバ100と、ドライバレーザ光源110と、ターゲット供給部120と、EUV集光ミラー130と、真空ポンプ140と、アパーチャを有する隔壁150,151と、ゲートバルブ160と、EUV光源コントローラ300と、ドロップレットコントローラ310と、パルス制御部320と、圧力制御部330とを、備えることができる。
【0011】
上記の各構成1,100,110,120,130,140,150,151,160,300,310,320,330は、少なくともそれぞれ一つずつ設けられており、説明のため本開示では単数形で記述される。しかし、その限りではなく各構成を複数備えてもよい。以下の説明では、基本的に単数形で記述する。ドロップレット201は、複数形で記述される場合もある。従って、本実施形態では、droplet(s)と表記する場合がある。
【0012】
真空チャンバ100は、容積の大きい第1チャンバ101と、容積の小さい第2チャンバ102とを有する。第1チャンバ101は、プラズマの生成等が行われるメインチャンバである。第2チャンバ102は、プラズマから放射されるEUV光を図外の露光装置に供給するための接続用チャンバである。
【0013】
第1チャンバ101には真空ポンプ140が接続されている。これにより、チャンバ100内は低圧状態に保持される。なお、第2チャンバ102に、別の真空ポンプを設ける構成としてもよい。その場合には、第1チャンバ101内の圧力を第2チャンバ102内の圧力よりも低くすることにより、デブリ(debris)が露光装置側に流れ込むのを抑制することができる。
【0014】
ターゲット供給部120は、例えば、錫(Sn)等のターゲット物質200で形成されるドロップレット201をチャンバ100内に射出する装置である。ドロップレット201は、レーザ光が照射されるターゲットである。ターゲット供給部120の本体部121は、溶融状態のターゲット物質200を収容しており、本体部121内には所定の圧力を加えることができる。
【0015】
ターゲット供給部120のノズル先端側には、「中間構造物」の一例である電極部123が設けられている。電極部123に、例えば、所定のパルス電圧が印加されると、ターゲット物質200と電極部123との間に電界が発生する。これにより、ターゲット供給部120からドロップレット201が引き出されて、チャンバ100内に向かって射出される。なお、ターゲット供給部120の詳細構成は、図2を参照に後述する。また、ドロップレットの射出は、上記のような電界によるものに限定しない。例えば、溶融ターゲットへの加圧による射出などでもよい。
【0016】
ドライバレーザ光源110は、ドロップレット201をプラズマ化するためのパルスレーザL1を出力する。ドライバレーザ光源110は、例えば、CO2(炭酸ガス)パルスレーザ光源として構成することができる。ドライバレーザ光源110は、例えば、波長10.6μm、出力20kW、パルス繰返し周波数30〜100kHz、パルス幅20nsecの仕様を有するレーザ光L1を出力する。なお、ドライバレーザ光源110の仕様は、上記の例に限定されない。さらに、CO2パルスレーザ光源以外の他の光源を用いる構成でもよい。
【0017】
ドライバレーザ光源110から出力されるレーザ光L1は、集光レンズ111と入射窓112とを介して、第1チャンバ101内に入射する。第1チャンバ101内に入射したレーザ光L1は、EUV集光ミラー130に設けられた入射穴131を通過して、ドロップレット201を照射する。
【0018】
ドロップレット201にレーザ光L1が集光照射されると、ドロップレット201はプラズマ生成点202において、プラズマ化する。以下、便宜上、単にプラズマと呼ぶ。プラズマは、波長13.5nmのEUV光L2を含む光を放射する。
【0019】
プラズマから放射されたEUV光L2は、EUVを集めるためのコレクタミラー130に入射し、コレクタミラー130により反射される。コレクタミラー130は、その反射表面が回転楕円面形状に形成されている。コレクタミラー130で反射されたEUV光L2は、第2チャンバ102内の中間集光点(IF:Intermediate Focus)に集光される。IFに集光されたEUV光L2は、開状態のゲートバルブ160を介して、露光装置へ導かれる。
【0020】
なお、本実施形態では、ドライバレーザ光源110のレーザ光出力周期に対応させて、EUV光生成に必要な量のドロップレット201を生成する。従って、デブリの発生量は少ない。しかし、デブリによる悪影響を低減させるべく、例えば、図1において、EUV光L2の光路を紙面に対して上下又は垂直な方向から挟むようにして、2つの磁場発生用コイル(不図示)を設けてもよい。各磁場発生コイルにより生成される磁場で、イオン性のデブリを捕捉できる。
【0021】
IFの前後には、2つの隔壁150,151が配置されている。コレクタミラー130で反射されたEUV光L2の進行方向を基準とすると、IFの手前側には、第1隔壁150が設けられている。IFの先には、第2隔壁151が設けられている。隔壁150,151は、例えば、それぞれ数mm〜10mm程度の開口部を有する。
【0022】
第1隔壁150は、第1チャンバ101と第2チャンバ102とを接続する位置近傍に設けられている。第2隔壁151は、第2チャンバ102と露光装置とを接続する位置近傍に設けられている。なお、IFの前後いずれか一方又は両方に、SPF(Spectral Purity Filter)を設けて、13.5nm以外の波長の光を遮断する構成としてもよい。
【0023】
次に、EUV光源装置1の制御構成300〜330を説明する。EUV光源コントローラ300は、EUV光源装置1の動作を制御する。EUV光源コントローラ300は、ドロップレットコントローラ310及びドライバレーザ光源110に、指示を与える。その指示により、所定のタイミングでドロップレット201が射出される。射出されたドロップレット201には、パルスレーザ光L1が照射される。さらに、EUV光源コントローラ300は、真空ポンプ140及びゲートバルブ160等の動作も制御する。
【0024】
さらに、EUV光源コントローラ300は、少なくとも一つのリカバリ制御部301と、少なくとも一つの位置計測部302とを備える。リカバリ制御部301は、リカバリ部400にターゲット供給部120を自動的にメンテナンスさせて、ターゲット供給部120を正常状態に回復させるための機能を有する。位置計測部302は、少なくとも一つの位置検出センサ340からの信号に基づいて、ドロップレット201の位置を計測し、その結果をリカバリ制御部301に通知する機能を有する。リカバリ制御の方法は後述する。
【0025】
なお、リカバリ制御部301及び位置計測部302は、EUV光源コントローラ300とは別のコントローラとして構成してもよいし、ドロップレットコントローラ310内に設ける構成としてもよい。
【0026】
位置検出センサ340は、例えば、カメラ、光学的センサ、電磁的センサ等の、ドロップレット201の位置を検出可能なセンサとして構成される。同一種類の、又は異なる種類の、位置検出センサ340を複数設ける構成でもよい。
【0027】
ドロップレットコントローラ310は、ターゲット供給部120の動作を制御する。ドロップレットコントローラ310には、パルス制御部320と圧力制御部330とが接続される。
【0028】
パルス制御部320は、ターゲット供給部120の先端側に設けられている電極部123に、所定のパルス電圧を印加するための装置である。パルス制御部320は、例えば、少なくとも一つの高電圧直流電源装置と、高電圧直流電源装置から入力される直流高電圧をパルスとして出力する少なくとも一つのスイッチングドライバと、スイッチングドライバにパルス周期を入力する少なくとも一つのパルス発生器とを含む(いずれも不図示)。
【0029】
圧力制御部330は、ターゲット供給部120の本体部121の内部に、所定の圧力を加えるための装置である。本体部121の内部は、圧力制御部330から供給される不活性ガス(例えば、アルゴンガス)により、所定の圧力に制御される。
【0030】
図2は、ターゲット供給部120及び圧力制御部330の構成を示す図である。先にターゲット供給部120の構成を説明する。ターゲット供給部120は、例えば、少なくとも一つの本体部121と、少なくとも一つのノズル部122と、少なくとも一つの電極部123と、少なくとも一つの絶縁部124と、少なくとも一つの加熱部125とを備える。
【0031】
本体部121は、ターゲット物質200を収容するものである。本体部121は、その先端部(図2中の下側)121Aが第1チャンバ101内に突出するようにして、チャンバ100に取り付けられている。本体部121内には、ターゲット物質200を収容するための収容部121Bが設けられている。先端部121A内には、射出流路部121Cが設けられている。
【0032】
収容部121Bは、本体部121の基端側(図2中の上側)に接続される配管126を介して、圧力制御部330に接続されている。射出流路部121Cは、収容部121B内とノズル部122との間を連通している。圧力制御部330からの不活性ガスは、配管126を介して、本体部121の収容部121Bに供給される。
【0033】
さらに、本体部121の外面側には、加熱部125が設けられている。加熱部125は、例えば、電熱ヒータ等で構成される。加熱部125は、本体部121内の錫が300℃程度の温度となるように加熱する。なお、300℃という値は一例であり、本開示はその値に限定されない。すなわち、ターゲット物質200が液体である温度であればよい。
【0034】
ノズル部122は、例えば、円盤状に形成されている。ノズル部122の中心部には、円形状の射出孔122Aが形成されている。射出孔122Aと本体部121の収容部121Bとは連通している。さらに、ノズル部122の下面側には、第1チャンバ101内のプラズマ生成点202に向けて突出するように、下向き円錐形状のノズル122Bがノズル部122と一体的に設けられている。ノズル122Bが、第1チャンバ101内に突出するようにして形成されているのは、ノズル122Bの先端に電界を集中させるためである。
【0035】
ノズル部122の材質について説明する。第1に、ノズル部122は、ターゲット物質としての錫に接触するため、錫に化学的または物理的に浸食されにくい材質であることが求められる。錫に浸食されにくい性質のことを、本明細書では、錫についての耐浸食性と呼ぶ。錫についての耐浸食性を有する材料としては、例えば、モリブデン(Mo)、タングステン(W)、タンタル(Ta)、チタン(Ti)、ステンレス、ダイヤモンド、セラミックス等を挙げることができる。また、セラミックス以外の材料としては炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンでもよい。セラミックスとしては、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスを挙げることができる。なお、本実施の形態では、ターゲット物質として錫を例に挙げたが、ターゲット物質は錫に限定されない。錫以外の物質をターゲット物質として用いる場合、ノズル部122は当該物質についての耐侵食性を有する任意の物質で形成されるのが好ましい。以下の説明においても、ターゲット物質として錫を単なる一例として説明するが、ターゲット物質は錫に限定されない。いずれの場合においても、錫以外の物質をターゲット物質として用いる場合、以下で錫についての耐侵食性が求められる各構成要素は、当該物質についての耐侵食性を有する任意の物質で構成することができる。
【0036】
第2に、ノズル部122内のターゲット物質200に電界を集中させるという観点からは、ノズル部122は、電気的絶縁性を有する方が好ましい。錫についての耐浸食性を有する各材料のうち、絶縁性を有する材料としては、ダイヤモンド又はセラミックスが知られている。従って、ノズル部122は、ダイヤモンド又はセラミックスから構成するのが好ましい。しかし、それらに限らず、ダイヤモンド又はセラミックス以外の材料から形成されるノズル部も、本開示の範囲に含まれる。たとえば、セラミックス以外の材料としては炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを挙げることができる。また、セラミックスとしては、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスを挙げることができる。
【0037】
本体部121には、少なくとも、錫についての耐浸食性が求められる。本体部121の全体のうち、錫に接触する部分は、錫についての耐浸食性を備えることが好ましい。
【0038】
中心部に貫通孔が設けられた円盤状の電極部123は、ノズル部122の下側に絶縁部124を挟んでノズル部122から離間して設けられている。電極部123の射出孔123Aとノズル122Bとは同軸状に位置している。射出孔123Aとノズル122B先端との間には、所定のギャップが形成される。
【0039】
電極部123の材質について説明する。第1に、電極部123は錫に接触する可能性があるため、錫についての耐浸食性を備えることが好ましい。第2に、電極部123は、スパッタに対して強い性質を備える必要がある。プラズマからの高速な錫粒子が電極部123の表面に衝突するおそれがあるためである。第3に、電極部123は導電性を備える必要がある。以上の条件を考慮すると、電極部123は、例えば、モリブデン、タングステン、タンタル、チタン、ステンレス等から形成されるのが好ましい。
【0040】
電極部123には、ドロップレット201の一部が付着し、異物210として残る可能性がある(図6参照)。そこで、後述の実施形態では、ノズル部122とプラズマ生成点202との間に位置する中間構造物としての電極部123を、ターゲット物質200に対して濡れ性の低い材料から形成する。これにより、電極部123に付着した異物210を落下させて、取り除くことができるようにしている。そのために、例えば、モリブデン、タングステン等の金属、または、アルミナ等のセラミックスから、電極部123を形成するか、それらの材料で電極部123をコーティングするのが好ましい。コーティング材料としては、炭化珪素、窒化珪素、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンや、これらを主成分とするセラミックスを挙げることができる。
【0041】
絶縁部124は、少なくともその一部がノズル部122と電極部123との間に挟設されるように設けられている。絶縁部124の内周側には、空間部124Aが形成される。ノズル122Bは、空間部124A内に突出するようにして設けられている。ノズル122Bと射出孔123Aとは、それぞれの中心軸が略一致する。
【0042】
絶縁部124は、ノズル部122と電極部123とを位置決めする機能の他に、絶縁機能及び伝熱機能を実現することが好ましい。絶縁機能とは、ノズル部122と電極部123との間を電気的に絶縁する機能である。伝熱機能とは、加熱部125で生じる熱を電極部123に導く機能である。これにより、ノズル部122及び電極部123の温度を錫の融点よりも高くして、ノズル部122と電極部123とに錫が固着するのを防止することができる。
【0043】
絶縁部124の材質について説明する。絶縁機能及び伝熱機能を考慮すると、絶縁部124は、絶縁性及び熱伝導率の高い材料から構成されるのが好ましい。従って、絶縁部124は、例えば、窒化アルミニウム(AlN)又はダイヤモンド等の材料から構成することができる。あるいは、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステンを主成分とするセラミックスから構成してもよい。
【0044】
圧力制御部330の構成について説明する。圧力制御部330は、例えば、一つの圧力コントローラ331と、一つの圧力調整弁332と、一つの排気ポンプ333と、一つの供給弁334と、一つの排出弁335とを備える。圧力制御部330は、一つのガス供給部336からのガスを、圧力調整弁332等を介して、ターゲット供給部120の本体部121内に供給する。なお、ターゲット物質200を加圧するためのガスとして、本実施形態ではアルゴンガスを用いる。しかし、アルゴンガス以外の不活性ガスを用いることもできる。
【0045】
圧力調整弁332は、ガス供給部336から流入し配管126内に送り出されるガスの圧力を、圧力コントローラ331により設定される所定値に調整して、配管126内に送り出す。配管126は圧力調整弁332から本体部121に至るガスの経路の一部を構成する。所定値の圧力に調整されたガスは、配管126へ至る配管経路の途中に設けられる供給弁334を介して、本体部121内に供給される。
【0046】
排気ポンプ333は、本体部121内のガスを排出するためのポンプである。供給弁334を閉弁し、かつ、排気通路126Aの途中に設けられる排出弁335を開弁した状態で、排気ポンプ333を作動させる。これにより、本体部121内のガスが排出される。
【0047】
ターゲット物質200に一定の圧力を加えた状態で、電極部123にパルス電圧を所定周期で印加する。その所定周期は、ドライバレーザ光源110から出力されるレーザ光L1の周期に対応させるように設定される。パルス電圧は、矩形波、三角波、正弦波のいずれでもよい。
【0048】
ガスが収容部121B内のターゲット物質200を加圧すると、ノズル122Bからターゲット物質200が僅かに突出する。但し、この状態では、ターゲット物質200はノズル122Bから外部に射出されない。つまり、ノズル122Bには、下向きに突出するメニスカスが形成される。
【0049】
ターゲット物質200をガスで加圧した状態で、電極部123にパルス電圧を印加すると、ノズル122Bから僅かに突出していたターゲット物質200が、静電吸引力によってノズル先端から切り離される。ノズル122Bから引き出されたターゲット物質200は、ドロップレット201としてプラズマ生成点202に向けて射出される。静電吸引力によって切り離されたドロップレット201は帯電している。
【0050】
本実施形態では、本体部121内のターゲット物質200をガスによって加圧した状態で、ノズル122Bに対向して設けられる電極部123にパルス電圧を印加する。これにより、本実施形態では、ノズル122Bから、必要に応じて必要なサイズのドロップレット201を射出することができる。
【0051】
図3は、リカバリフラグを設定する処理を示すフローチャートである。リカバリフラグは、リカバリ動作を実行すべき時期が到来したことを示す情報である。リカバリ動作とは、ターゲット供給部120からプラズマ生成点202に向けてターゲット物質200を正確に射出できるように、ターゲット供給部120から異物210を除去する動作である。本処理は、リカバリ制御部301により実行される。
【0052】
リカバリ制御部301は、判定用情報を取得し(S10)、リカバリフラグを設定するための条件が成立したか否かを判定する(S11)。設定条件が成立する場合(S11:YES)、リカバリ制御部301は、リカバリフラグを設定する(S12)。設定条件が成立しない場合(S11:NO)、S10に戻る。
【0053】
判定用情報とは、リカバリフラグの設定の可否を判定するために使用される情報である。判定用情報としては、例えば、前回のリカバリ動作からの経過時間、ターゲット供給部120の起動回数、ターゲット供給部120の稼働積算時間、プラズマ生成点202におけるドロップレット201の位置精度等を挙げることができる。さらに、ターゲット供給部120の加熱回数や加熱時間、ドロップレットの射出回数や射出時間を判定用情報として用いてもよい。
【0054】
リカバリ制御部301は、上述の各判定用情報のうちの少なくともいずれか一つに基づいて、リカバリフラグの設定の可否を判定する。判定用情報を用いた具体的な例は、別の実施形態で後述する。
【0055】
図4は、リカバリ制御処理のフローチャートである。リカバリ制御部301は、リカバリフラグが設定されているか否かを判定する(S20)。リカバリフラグが設定されていない場合(S20:NO)、リカバリ制御部301は、通常モードに移行する(S26)。通常モードにおける処理の内容は、図5で後述する。
【0056】
リカバリフラグが設定されている場合(S20:YES)、リカバリ制御部301は、リカバリ可能なタイミングであるか否かを判定する(S21)。リカバリ可能なタイミングではない場合(S21:NO)、リカバリ制御部301は、通常モードに移行する(S26)。
【0057】
リカバリ可能なタイミングとは、リカバリ動作を実施できるタイミングを意味する。例えば、リカバリフラグが設定されている場合でも、露光装置で露光作業が行われている間は、EUV光の出力を停止することはできない。一連の作業が終了するまで、EUV光源装置1は、EUV光を供給し続ける必要がある。そこで、本実施形態では、例えば、露光装置での作業が一定時間休止するタイミングを待ち、一定時間の休止が確定された時点でリカバリ動作を実施する。リカバリ制御部301は、露光装置に問い合わせることにより、又は、露光装置からの信号を取得することにより、露光装置での作業が一定時間休止するタイミングを判断することができる。
【0058】
リカバリ可能なタイミングである場合(S21:YES)、リカバリ制御部301は、リカバリモードに移行する(S22)。リカバリ制御部301は、リカバリ部400に指示を与えることにより、リカバリ部400にリカバリ動作を実行させる(S23)。
【0059】
リカバリ動作が実行された後、リカバリ制御部301は、ターゲット供給部120にテスト動作を実行させる(S24)。テスト動作とは、いわゆる試し撃ちであり、ターゲット供給部120にドロップレット201を所定数又は所定時間だけ射出させる。
【0060】
リカバリ制御部301は、位置計測部302による計測結果に基づいて、ターゲット供給部120から射出されたドロップレット201のプラズマ生成点202付近における位置精度が所定範囲内にあるか否かを判定する(S25)。
【0061】
たとえば、リカバリ制御部301は、ドロップレット201の位置変動(3σ)の値がドロップレット201の直径Dの1/n(例えば、n=2〜3)以下になっているか否かを判定する。nの値は例示である。
【0062】
試し撃ちされたドロップレット201の位置精度が所定範囲内に収まっている場合(S25:YES)、リカバリ制御部310は、リカバリモードから通常モードに移行する(S26)。これとは逆に、ドロップレット201の位置精度が所定範囲内に収まっていない場合(S25:NO)、リカバリ制御部301は、再度リカバリ動作を実行させる(S23)。
【0063】
図5は、図4中の通常モード処理(S26)の詳細を示すフローチャートである。リカバリ制御部301は、位置計測部302からの計測結果に基づいて、ドロップレット201の位置を取得する(S260)。なお、通常モードとは、所定のタイミングで、ドロップレット201が射出される状態である。通常モードにおいて射出されたドロップレット201にパルスレーザ光L1が照射されると、生成されたEUV光L2がIFに集光された後、露光装置に導かれる。
【0064】
リカバリ制御部301は、ドロップレット201のプラズマ生成点202における位置精度が所定範囲内に収まっているか否かを判定する(S261)。ドロップレット201の位置精度が所定範囲内に収まっている場合(S261:YES)、リカバリ制御部301は、通常モードを維持する(S262)。ターゲット供給部120から射出されたドロップレット201は、プラズマ生成点202に略正確に到着しているためである。
【0065】
ドロップレット201の位置精度が所定範囲内に収まっていない場合(S261:NO)、リカバリ制御部301は、通常モードからリカバリ制御処理に移行する(S263)。リカバリ制御処理に移行する際、リカバリフラグを設定する。これにより、図4に示すS21からの処理が実行される。上述の通り、適切なタイミングでターゲット供給部120の機能を回復させるためのリカバリ動作が実行される。なお、図示しないが、リカバリモードによっても機能の回復が行われない場合は、警報や通信により外部へ知らせることができる。
【0066】
このように構成される本実施形態によれば、リカバリ動作を自動的に実行できるため、オペレータがドロップレットの射出状態を常時監視する必要がなく、メンテナンス効率が向上する。
【0067】
さらに、本実施形態では、ターゲット供給部120を完全停止させることなく、一時的にリカバリ動作を実施することにより、ターゲット供給部120を正常状態に回復させる。従って、ターゲット供給部120のメンテナンス時間を短縮することができ、稼働率を向上できる。その結果、露光作業の作業効率も高めることができる。
【0068】
さらに、本実施形態では、下流工程(露光作業)の状況を考慮して、ターゲット供給部120のリカバリを行うため、装置の使い勝手が向上する。
【実施形態2】
【0069】
図6を参照して第2実施形態を説明する。以下に述べる各実施形態は、第1実施形態の変形例に相当する。従って、第1実施形態との相違点を中心に説明する。本実施形態では、リカバリ部400の具体例を説明する。
【0070】
図6は、ターゲット供給部120の先端側を拡大して示す説明図である。中間構造物500は、ノズル部122に対向して設けられている。中間構造物500の具体例は、図2に示す電極部123である。中間構造物500としては、ターゲット物質200をノズル部122から引き出すための電極部123に限定されない。
【0071】
ノズル部122とプラズマ生成点202との間に存在する構造物であって、ドロップレット201に起因する異物210が付着する可能性のある構造物は、中間構造物500である。ドロップレット201は帯電しているので、電界又は磁界によって移動経路や速度を変えることができる。このため適切な位置に中間構造物500を配することによってドロップレット201の運動を制御することが可能となる。電極部123以外の中間構造物500としては、例えば、ドロップレット201の移動経路を修正するための静電レンズ、ドロップレット201の速度を上げるための加速用電極等を挙げることができる。また、これに限定されず永久磁石や電磁コイル等を用いてドロップレット201の移動経路を修正してもよい。永久磁石や電磁コイルも中間構造物500に含まれる。
【0072】
リカバリ部400の一例としてのヒータ410は、中間構造物500の下面に設けられる。ヒータ410は、例えば、環状の中間構造物500の下面を覆うように、環状に形成される。ヒータ410は、中間構造物500に付着した異物210を加熱し、溶融させる。異物210は、一つのドロップレット201の全部又は一部が中間構造物500に付着することにより、形成される。従って、ヒータ410は、リカバリ制御部301が出力する信号をヒータ電源415が受信し、ヒータ電源415からヒータ410に電力が供給されることによって、ターゲット物質200の融点を超える温度で発熱する。なお、ヒータ410には図示しない温度センサが設けられてもよい。
【0073】
ヒータ410からの熱により溶融した異物210は、重力に従って中間構造物500から流れ落ちる。溶けた異物210は、例えば、中間構造物500の中央に形成される開口部501を介して、落下する。その開口部501は、ドロップレット201が通過するために設けられたものである。
【0074】
なお、中間構造物500から除去される異物210が、ターゲット供給部120の下側に配置されている部品(例えば、コレクタミラー130)に付着するのを防止するために、後述の実施形態では、除去された異物210を捕獲するための構成又は異物210からコレクタミラー130を保護するための構成を設けている。
【0075】
このように構成される本実施形態は、第1実施形態と同様の効果を奏する。さらに、本実施形態は、ヒータ410の熱によって、中間構造物500に付着した異物210を溶かして取り除く。従って、中間構造物500に付着した異物210により、ドロップレット201の移動経路が逸れるのを防止でき、ドロップレット201の位置精度を高めることができる。
【実施形態3】
【0076】
図7を参照して第3実施形態を説明する。第3実施形態では、リカバリ部400の一例としてのヒータ411を、中間構造物500の外周面に設けている。ヒータ411は、環状の中間構造物500の外周面を覆うように、短い筒状に形成される。
【0077】
図7は、ターゲット供給部120の先端側を拡大して示す説明図である。第2実施形態と同様に、ヒータ411は、中間構造物500を加熱することにより、中間構造物500の表面に付着した異物210を溶融状態にし、落下させて取り除く。このように構成される本実施形態も第2実施形態と同様の効果を奏する。
【実施形態4】
【0078】
図8を参照して第4実施形態を説明する。図8は、ターゲット供給部120の先端側を拡大して示す説明図である。本実施形態では、第2実施形態とは逆に、環状のヒータ412を中間構造物500の上面に設ける。このように構成される本実施形態も第2実施形態と同様の効果を奏する。
【実施形態5】
【0079】
図9,図10を参照して第5実施形態を説明する。本実施形態は、収容部121Bに収容されているターゲット物質200を用いて中間構造物500を加熱することにより、中間構造物500に付着した異物210を除去する。
【0080】
図9は、ターゲット供給部120の先端側を拡大して示す説明図である。中間構造物500の外周面を取り囲むようにして、環状の加熱パイプ413が設けられている。リカバリ部400の一例としての加熱パイプ413内部には、ターゲット供給部120内に蓄積されている溶融状態のターゲット物質200が供給される。
【0081】
加熱パイプ413内を流れるターゲット物質200からの伝導熱により、中間構造物500の全体が加熱される。これにより、中間構造物500に付着した異物210が溶けて落下する。
【0082】
図10は、第5実施形態の変形例に該当する。図10に示すように、加熱パイプ413を、絶縁部124の外周を覆うようにして設けてもよい。収容部121Bには、ターゲット物質200が流出する流出口121D(1)と、ターゲット物質200が流入する流入口121D(2)とが設けられている。加熱パイプ413は、流路413Aと流入口121D(1)及び流出口121D(2)を介して、収容部121Bに接続されている。流路413Aにはポンプ413Bが設けられている。なお、流路413Aの途中に、ターゲット物質200内の不純物を除去するためのフィルタ装置を設けてもよい。
【0083】
加熱パイプ413には、収容部121B内のターゲット物質200が、流出口121D(1)及び流路413Aを介して流入する。加熱パイプ413を流れるターゲット物質200は、絶縁部124を介して中間構造物500を加熱する。
【0084】
中間構造物500を加熱したターゲット物質200は、加熱パイプ413から、流路413Aとポンプ413B及び流入口121D(2)を介して、収容部121B内に戻される。収容部121Bに戻されたターゲット物質200は、加熱部125により加熱される。このように構成される本実施形態も上述実施形態と同様の効果を奏する。
【実施形態6】
【0085】
図11を参照して第6実施形態を説明する。本実施形態では、電磁波源414を用いて中間構造物500を加熱し、中間構造物500に付着した異物210を取り除く。図11は、ターゲット供給部120の先端側を拡大して示す説明図である。
【0086】
リカバリ部400の一例としての電磁波源414は、例えば、赤外線レーザ光線又はマイクロ波等の電磁波を出力する。電磁波源414から出力される電磁波は、中間構造物500に照射され、中間構造物500を加熱する。
【0087】
電磁波がよく吸収されるように、中間構造物500の表面粗さを設定してもよい。又は、電磁波を吸収し易い物質で、中間構造物500の全部又は一部(電磁波の照射される部分)をコーティングする構成でもよい。さらに、電磁波を異物210に直接照射する構成でもよい。このように構成される本実施形態も上述の実施形態と同様の効果を奏する。
【実施形態7】
【0088】
図12A及び12Bを参照して第7実施形態を説明する。本実施形態では、アルゴンガス等の不活性ガスを用いて、中間構造物500に付着した異物210を吹き飛ばして、取り除く。図12Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図12Bは、ノズル部120及びガスパイプ420の断面図である。
【0089】
図12Aに示すように、中間構造物500とノズル部122との間に、リカバリ部400の一例としてのガスパイプ420の先端が設けられている。ガスパイプ420を介して、アルゴンガス等の不活性ガスを蓄積するガス源420Aからのガスを、バルブ470を開くことでノズル部120と中間構造物500との間に吹き付けて、異物210を除去する。バルブ470はリカバリ制御部301からの信号によって開閉可能である。なお、本実施の形態ではバルブ470は電磁弁として説明しているが、空圧で動作するバルブでもよい。
【0090】
このように構成される本実施形態も第1実施形態と同様の効果を奏する。本実施形態では、ガスを異物210に吹き付けて除去するため、中間構造物500を加熱する必要がない。但し、中間構造物500を加熱して異物210を溶融状態にしておけば、より簡単に異物210を除去することができる。
【実施形態8】
【0091】
図13を参照して第8実施形態を説明する。本実施形態では、中間構造物500の内部に、リカバリ部400の一例としてのガス流路421を設ける。図13は、ターゲット供給部120の先端側を拡大して示す説明図である。
【0092】
中間構造物500には、その半径方向にガス流路421が形成されている。ガス流路421の一端側はガス源420Aに接続されている。ガス流路421の他端側は、中間構造物500の中央部に形成された穴501に連通している。
【0093】
ガス流路421から穴501に向けて噴出される不活性ガスは、穴501の周辺に付着している異物210を吹き飛ばして除去する。このように構成される本実施形態も第7実施形態と同様の効果を奏する。
【実施形態9】
【0094】
図14A及び14Bを参照して第9実施形態を説明する。本実施形態では、絶縁部124に、リカバリ部400の一例としてのガス流路422を設ける。図14Aは、ターゲット供給部120の先端側の拡大図である。図14Bは、絶縁部124及びガス流路422の断面図である。
【0095】
筒状の絶縁部124には、その半径方向にガス流路422が形成されている。ガス流路422の一端側はガス源420Aに接続されており、ガス流路422の他端側はノズル部122と電極部123との間の空間124Aに連通している。
【0096】
ガス流路422から空間124A内に噴出される不活性ガスは、空間124A内を旋回して、空間124A内の異物210を吹き飛ばす。吹き飛ばされた異物210は、射出孔123Aから外部に排出される。このように構成される本実施形態も第7実施形態と同様の効果を奏する。
【実施形態10】
【0097】
図15を参照して第10実施形態を説明する。本実施形態では、ターゲット供給部120の本体部121側に、リカバリ部の一例としてのガス流路423を設けている。図15は、ターゲット供給部120の断面図である。
【0098】
ガス流路423は、例えば、加熱部125と本体部121とを貫通するように、ターゲット供給部120に設けられる。ガス流路423の一端側はガス源420Aに接続されており、ガス流路423の他端側は、ノズル部122と電極部123との間の空間124A内に連通している。
【0099】
ガス流路423の他端側は、電極部123の射出孔123A付近に向けて、設けられている。ガス流路423から噴出される不活性ガスは、射出孔123A付近に付着した異物210及び空間124A内の異物210を吹き飛ばす。吹き飛ばされた異物210は、射出孔123Aから外部に排出される。本実施形態も第7実施形態と同様の効果を奏する。
【実施形態11】
【0100】
図16A及び16Bを参照して第11実施形態を説明する。本実施形態は、図12A及び12Bに示す第7実施形態を前提にしており、ガスパイプ420を複数配置している。図16Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図16Bは、ノズル部122及びガスパイプ420の断面図である。
【0101】
図16Bに示すように、ノズル122Bの周囲を取り囲むようにして(換言すれば、中間構造物500の穴501の周囲を取り囲むようにして)、複数のガスパイプ420が周方向に等間隔に離間して配置されている。
【0102】
各ガスパイプ420は、それぞれガス源420Aに接続されている。各ガスパイプ420から噴出される不活性ガスにより、中間構造物500に付着している異物210が吹き飛ばされて除去される。なお、各ガスパイプ420から不活性ガスを噴出させるタイミングを、それぞれ異ならせることもできる。例えば、あるガスパイプ420を起点にして、時計回り又は反時計回りの順番で、ガスパイプ420から次々に不活性ガスを噴出させる構成でもよい。このように構成される本実施形態も第7実施形態と同様の効果を奏する。本実施形態では、不活性ガスを複数のガスパイプ420から噴出させることができるため、異物210を除去する能力を第7実施形態よりも高めることができる。
【実施形態12】
【0103】
図17A及び17Bを参照して第12実施形態を説明する。本実施形態は、図14A及び14Bに示す第9実施形態を前提にしている。本実施形態では、筒状の絶縁部124に、複数のガス流路422を周方向に等間隔に離間させて設けている。図17Aは、ターゲット供給部120の先端側を拡大して示す説明図である。図17Bは、絶縁部124及びガス流路422の断面図である。
【0104】
各ガス流路422の一端側はガス源420Aに接続されており、各ガス流路422の他端側は空間124Aに連通している。各ガス流路422から空間124A内に向けて噴出される不活性ガスにより、空間124A内の異物210は吹き飛ばされて、射出孔123Aから外部に排出される。なお、各ガス流路422から不活性ガスを噴出させるタイミングは、共通に設定してもよいし、異ならせることもできる。このように構成される本実施形態も第7実施形態と同様の効果を奏する。本実施形態では、複数のガス流路422から不活性ガスを噴出させることができるため、異物210を除去する能力を第9実施形態よりも高めることができる。
【0105】
なお、図15に示す第10実施形態においても、第12実施形態と同様に、複数のガス流路423を設けることができることは、いわゆる当業者であれば容易に理解できるであろう。
【実施形態13】
【0106】
図18を参照して第13実施形態を説明する。本実施形態は、ノズル部122の外部からノズル部122内に不活性ガスを注入することにより、ノズル部122内の異物210を除去する。図18は、ターゲット供給部120の断面図である。
【0107】
カバー430は、ノズル部122等を気密に覆うことができるようにして設けられている。カバー430は、開閉機構431によって開閉可能に取り付けられる。開閉機構431は、カバー430でノズル部122等を覆ったり、又は、ノズル部122等からカバー430を開放したりする。開閉機構431は、例えば、モータ又はシリンダ及びリンク機構等から構成できる。
【0108】
ガス源430Aとカバー430の内部とは、ガス流路430Bを介して接続されている。本体部121の内壁には、異物210を捕獲するためのトラップ430Cが複数設けられている。各トラップ430Cは、例えば、テーパー状のリングとして構成されている。各トラップ430Cは、トラップ430Cと本体部121の内壁との間に、上方に開口する空間430Dが形成されるようにして取り付けられる。
【0109】
本実施形態では、カバー430と、ガス源430Aと、ガス流路430Bと、トラップ430Cと、開閉機構431とから、リカバリ部400が構成される。
【0110】
リカバリモードでは、開閉機構431を動作させてカバー430でノズル部122等を気密に覆った後で、ガス源430Aから不活性ガスをカバー430内の空間に送り込む。この時、カバー430内のガス圧力を、収容部121B内の圧力よりも高くすることが必要である。カバー430内に注入された不活性ガスは、ノズル部122等を介して収容部121B内に流入する。その際、ノズル部122内の異物210は、収容部121B内に押し込まれる。
【0111】
収容部121B内に押し込まれた複数の異物210のうち少なくとも一部は、ターゲット物質200内を浮遊しながら、複数のトラップ430Cのいずれかに捕獲され、空間430D内に収容される。
【0112】
このように構成される本実施形態も第1実施形態と同様の効果を奏する。本実施形態では、カバー430の内部に外部から不活性ガスを注入することにより、ノズル部122内の異物210を収容部121B内に押し戻すことができる。さらに、収容部121B内に押し戻された異物210の少なくとも一部を、複数のトラップ430Cのいずれかで捕獲することができる。従って、タノズル部122内から異物210を除去して、ターゲット供給部120の機能を正常に回復させることができる。ここでのリカバリ対象の機能とは、主に、ドロップレット201をプラズマ生成点202に正確に送り出す機能である。
【実施形態14】
【0113】
図19を参照して第14実施形態を説明する。本実施形態では、ノズル部122内の異物210を外部に吸い出すようになっている。図19は、ターゲット供給部120の断面図である。
【0114】
ターゲット供給部120には、吸引管440が設けられている。吸引管440の一端側は、先端部121A内の射出流路部121Cに向けて延びている。吸引管440の他端側には、吸引ポンプ440Aが設けられている。さらに、吸引管440により吸引される異物210及びターゲット物質200を回収するための回収槽440Bが設けられる。本実施形態では、吸引管440と、吸引ポンプ440A及び回収槽440Bとにより、リカバリ部400が構成される。
【0115】
吸引ポンプ440Aを作動させると、吸引ポンプ440Aとターゲット供給部120の間にある図示しないバルブが開となり、ターゲット供給部120の先端側に滞留している異物210及びターゲット物質200は、吸引管440の先端から吸い込まれ、回収槽440Bに吐出される。回収されたターゲット物質200は、異物210を除去して再使用することもできる。
【0116】
このように構成される本実施形態では、ターゲット供給部120内の異物210を吸引して除去するため、第1実施形態と同様に、ターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態15】
【0117】
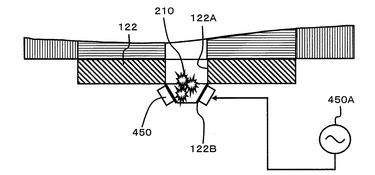
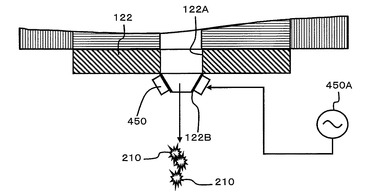
図20A及び20Bを参照して第15実施形態を説明する。図20A及び20Bはノズル部122を拡大して示す断面図である。本実施形態では、ノズル部122に振動を与えることにより、ノズル部122内に滞留している異物210を破砕して、外部に排出させる。図20A及び20Bでは、便宜上、絶縁部124及び電極部123が省略されている。
【0118】
リカバリ部400の一例としての振動体450は、ノズル122Bの外周側に設けられている。振動体450は、高周波電源450Aからの電圧に従って、振動する。図20Aに示すように、振動体450が振動すると、異物210は、振動により細かく破砕される。図20Bに示すように、細かく分解された異物210は、ノズル122Bの外部に排出される。
【0119】
このように構成される本実施形態でも、ターゲット供給部120を自動的にメンテナンスすることができ、第1実施形態と同様の効果を奏する。
【実施形態16】
【0120】
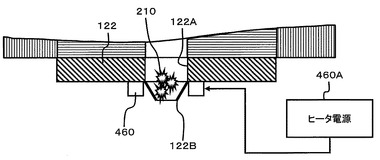
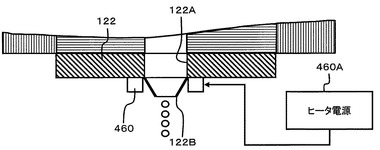
図21A及び21Bを参照して第16実施形態を説明する。本実施形態では、ノズル部122を加熱することにより、ノズル部122内に滞留している異物210を溶融させて排出させる。図21A及び21Bは、ノズル部122を拡大して示す断面図である。ノズル122Bの外周側には、リカバリ部400の一例としてのヒータ460が設けられている。
【0121】
図21Aに示すように、ヒータ460は、ヒータ電源460Aから供給される電力を利用して発熱する。ヒータ460は、異物210が溶融する程度の温度に加熱される。図21Bに示すように、溶融された異物は、ノズル122Bから外部に排出される。このように構成される本実施形態も第15実施形態と同様の効果を奏する。
【実施形態17】
【0122】
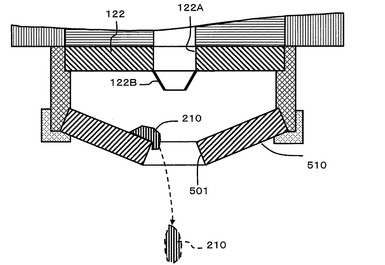
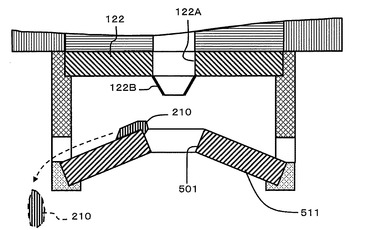
図22A及び22Bを参照して第17実施形態を説明する。本実施形態では、中間構造物510の少なくとも表面を、ターゲット物質200が付着しにくい材料から形成する。図22A及び22Bは、ターゲット供給部120の先端側を拡大して示す説明図である。
【0123】
中間構造物510の表面は、ターゲット物質200に対して濡れ性の悪い材料(ターゲット物質に対して接触角の大きい材料)でコーティングされている。中間構造物510の全体を、ターゲット物質200に対して濡れ性の悪い材料から形成してもよい。ターゲット物質200が錫の場合、濡れ性の悪い材料としては、例えば、モリブデン、タンタル、アルミナセラミックス等を挙げることができる。あるいは、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、酸化タングステン等を主成分とするセラミックスから構成してもよい。
【0124】
図22Aに示すように、中間構造物510を皿状に形成することができる。ノズル122Bから吐出されたドロップレット201の全部又は一部が、中間構造部510の上側の表面に付着して異物210となる場合がある。その異物210は、中間構造物510の表面を滑り、穴501から流れ落ちる。
【0125】
図22Bに示すように、中間構造物511を、伏せた皿状に形成してもよい。この場合、中間構造物511の表面に付着した異物210は、中間構造物511の外縁に向けて滑り、中間構造物511の外縁から流れ落ちる。穴501近傍に付着した異物210は、穴501から下に流れ落ちる。
【0126】
このように構成される本実施形態は、本開示の他の実施形態と組み合わせてターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態18】
【0127】
図23Aから23Cを参照して第18実施形態を説明する。本実施形態では、リカバリモード時に、ノズル部122内の異物210を外部に排出させる。
【0128】
図23Aから23Cは、ノズル部122から異物210を外部に押し出す方法を示す説明図である。図23Aに示すように、ノズル部122の近傍には、異物210が滞留している。そこで、図23Bに示すように、ノズル部122内の圧力を一時的に高める。これにより、図23Cに示すように、ノズル部122に滞留していた異物210が外部に押し出される。
【0129】
ノズル部122内の異物を外部に排出させる方法としては、幾つか考えられる。第1の方法は、収容部121B内に加えるガス圧力(背圧)を高めることにより、ノズル部122内の圧力を高くして異物210を排出させる方法である。第2の方法は、弾性変形の範囲内でノズル部122を含むターゲット物質流路を構成する部材を変形させて、ターゲット物質流路の体積を減少させることにより、ノズル部122内の圧力を高めて、異物210を排出させる方法である。第3の方法は、電極部123のような引き出し用電極を設け、静電吸引力により異物210を排出させる方法である。上記の各方法を組み合わせて用いてもよい。
【0130】
このように構成される本実施形態でも、ターゲット供給部120を自動的にメンテナンスすることができ、装置の使い勝手が向上する。
【実施形態19】
【0131】
図24から図25Bを参照して第19実施形態を説明する。本実施形態では、ターゲット供給部120から除去される異物210を捕獲するための捕獲部600を設ける。図24は、ターゲット供給部120と捕獲部600とコレクタミラー130との関係を模式的に示す説明図である。図25A及び25Bは、捕獲部600の位置を切り替える様子を示す説明図である。なお、図24中の回収装置170は、通常モード時においてターゲット供給部120から射出されるドロップレット201のうち、レーザ光の照射されなかったドロップレット201を回収するための装置である。
【0132】
図24に示すように、ターゲット供給部120とコレクタミラー130との間には、捕獲部600が設けられている。捕獲部600は、ターゲット供給部120から取り除かれて落下する異物210を受け止めて、コレクタミラー130に異物210が付着するのを防止する。
【0133】
捕獲部600は、例えば、シャッタ601と、シャッタ601を回転させるためのモータ602とを備える。シャッタ601は、平板状に形成してもよいし、中央部が窪んだ皿状に形成してもよい。皿状に形成した場合は、シャッタ601に収容された異物210が、シャッタ601の回転時に発生する遠心力で周囲に飛散するのを、より効果的に防止できる。
【0134】
図25Aは、リカバリモード時におけるシャッタ601の位置を示す。この位置を第1位置、又は、捕獲位置と呼ぶ。シャッタ601が第1位置にある場合、ターゲット供給部120から取り除かれた異物210は、シャッタ601により捕獲される。従って、コレクタミラー130に異物210が付着することを防止できる。
【0135】
図25Bは、通常モード時におけるシャッタ601の位置を示す。この位置を第2位置、又は、通常位置と呼ぶ。シャッタ601が第2位置にある場合、ターゲット供給部120から射出されたドロップレット201は、プラズマ生成点202に向けて移動することができる。従って、シャッタ601が第2位置にある場合、ターゲット供給部120によるドロップレット201の軌道は遮断されず、プラズマ生成点202においてEUV光が発生する。
【0136】
このように構成される本実施形態は、ターゲット供給部120から除去される異物210がコレクタミラー130に付着するのを防止できる。従って、異物210を除去する前記各実施形態と好適に組み合わせて、メンテナンス作業の効率を高めることができ、装置の使い勝手が向上する。
【実施形態20】
【0137】
図26を参照して第20実施形態を説明する。本実施形態では、コレクタミラー130の表面を保護するためのミラー保護部610を設ける。図26は、ターゲット供給部120とミラー保護部610とコレクタミラー130との関係を模式的に示す説明図である。
【0138】
ミラー保護部610は、ドーム形状のシャッタ611と、シャッタ611を回動させるためのモータ612とを備える。通常モード時では、シャッタ611は、EUV光路を遮らない位置で待機している。シャッタ611は、プラズマの生成、EUV光の発生、EUV光の集光に何ら悪影響を与えない位置で待機する。
【0139】
リカバリモード時になると、モータ612は、シャッタ611をコレクタミラー130の反射面を覆う位置まで移動させる。これにより、シャッタ611は、コレクタミラー130とターゲット供給部120との間を遮断し、ターゲット供給部120から除去される異物210からコレクタミラー130を保護する。このように構成される本実施形態は、第19実施形態と同様の効果を奏する。
【実施形態21】
【0140】
図27のフローチャートを参照して第21実施形態を説明する。本実施形態を含む以下の各実施形態は、図3で述べたリカバリフラグ設定処理の具体例である。
【0141】
リカバリ制御部301は、ターゲット供給部120が起動した場合(S100:YES)、起動回数を積算するカウンタNSの値を1つ増加させる(NS=NS+1,S101)。続いて、リカバリ制御部301は、起動回数NSが所定の閾値NStに達したか否かを判定する(NS≧NSt,S102)。
【0142】
起動回数NSが閾値NStに達した場合(S102:YES)、リカバリ制御部301は、リカバリフラグを設定し(S103)、起動回数NSをリセットする(S104)。
【0143】
このように、ターゲット供給部120が所定回数NStだけ起動された場合にリカバリフラグを設定して、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態22】
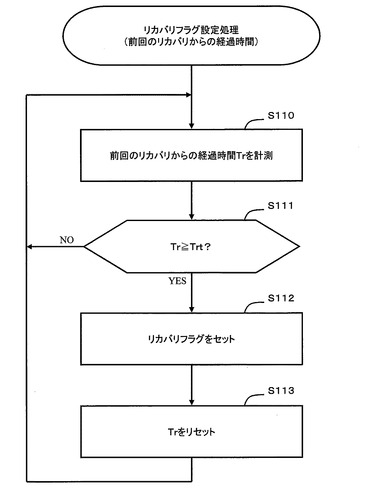
【0144】
図28のフローチャートを参照して第22実施形態を説明する。リカバリ制御部301は、タイマを備え、前回のリカバリ動作の実行時(メンテナンス作業の実行時)からの経過時間Trを計測している(S110)。リカバリ制御部301は、経過時間Trが所定の経過時間Trtに達したか否かを判定する(Tr≧Trt,S111)。
【0145】
前回のリカバリ動作実行時からの経過時間Trが所定の経過時間Trtに達した場合(S111:YES)、リカバリ制御部301は、リカバリフラグを設定し(S112)、経過時間Trをリセットする(S113)。
【0146】
このように、前回のリカバリ動作実行時からの経過時間Trが所定の経過時間Trtに達した場合にリカバリフラグを設定して、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態23】
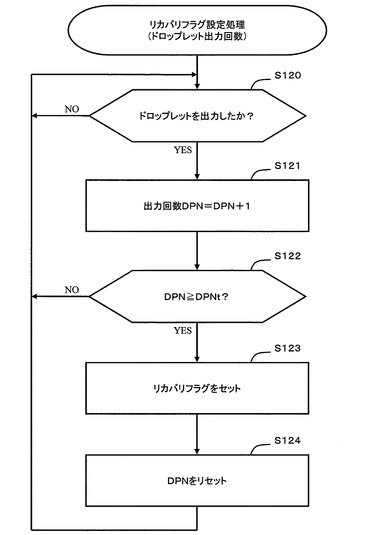
【0147】
図29のフローチャートを参照して第23実施形態を説明する。リカバリ制御部301は、ターゲット供給部120によるドロップレット201の出力(射出)を監視する(S120)。ターゲット供給部120からドロップレット201が出力されると(S120:YES)、リカバリ制御部301は、出力回数を積算するためのカウンタDPNの値を1つ増加させる(DPN=DPN+1,S121)。
【0148】
リカバリ制御部301は、ドロップレット出力回数DPNが所定の出力回数DPNtに達したか否かを判定する(DPN≧DPNt,S122)。ドロップレット出力回数は、たとえば、図1におけるパルス制御部320の出力パルスと、位置検出センサ340による検出信号とが両方検出された回数として計測してもよい。ドロップレット出力回数DPNが所定の出力回数DPNtに達した場合(S122:YES)、リカバリ制御部301は、リカバリフラグを設定し(S123)、ドロップレット出力回数DPNをリセットする(S124)。
【0149】
このように、ターゲット供給部120から出力されるドロップレット201の数DPNが所定の回数DPNtに達した場合に、ターゲット供給部120を自動的にメンテナンスすることができる。
【実施形態24】
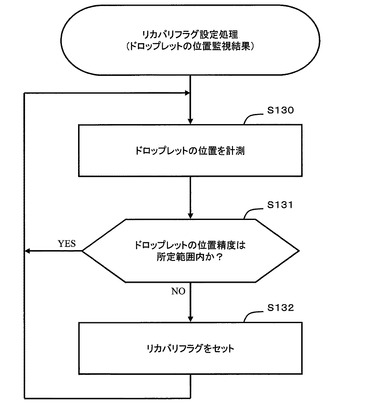
【0150】
図30のフローチャートを参照して第24実施形態を説明する。リカバリ制御部301は、位置計測部302を介してドロップレット201の位置を計測する(S130)。リカバリ制御部301は、ドロップレット201の位置精度が所定範囲内にあるか否かを判定する(S131)。さらにドロップレットコントローラ310の射出指示によりドロップレット201が射出されているか否かを判定してもよい。
【0151】
リカバリ制御部301は、ドロップレット201の位置精度が所定範囲内に収まっていない場合(S131:NO)、リカバリフラグを設定する(S132)。S131においてNOと判定する条件は、ドロップレットコントローラ310の射出指示が出ているにも拘らずドロップレット201が検出されない場合であってもよい。このように、ターゲット供給部120から出力されるドロップレット201の位置が不安定になった場合やドロップレットが射出されない場合に、ターゲット供給部120を自動的にメンテナンスすることができる。
【0152】
なお、本開示は、上述した各実施形態に限定されない。いわゆる当業者であれば、本開示の範囲内で、種々の追加や変更等を行うことができる。例えば、上記各実施形態を適宜組み合わせることができる。
【0153】
例えば、異物を加熱する実施形態(第2実施形態、第3実施形態、第4実施形態、第5実施形態、第6実施形態)と、異物に不活性ガスを吹き付ける実施形態(第7実施形態、第8実施形態、第9実施形態、第10実施形態、第11実施形態、第12実施形態)とは、適宜組み合わせることができる。異物を加熱して流動性を上げた状態で不活性ガスを吹き付ける方が、異物を除去し易いためである。
【0154】
さらに、ノズルの外部から不活性ガスを注入する第13実施形態、又は、ノズル内の異物を吸引する第14実施形態において、異物を加熱する構成を加えてもよい。
【0155】
さらに、第1−16実施形態と、ターゲット物質に対する濡れ性の悪い材料を用いる第17実施形態とを組み合わせることにより、付着した異物をより効果的に除去できる。
【0156】
さらに、第1−18実施形態と、異物捕獲部に関する第19実施形態又はミラー保護部に関する第20実施形態とを組み合わせることにより、ターゲット供給部から除去された異物がコレクタミラーに付着するのを防止できる。
【0157】
上記の説明は、制限ではなく単なる例示を意図したものである。従って、添付の特許請求の範囲を逸脱することなく本開示の実施形態に変更を加えることができることは、当業者には明らかであろう。本明細書及び添付の特許請求の範囲全体で使用される用語は、「限定的ではない」用語と解釈されるべきである。例えば、「含む」又は「含まれる」という用語は、「含まれるものとして記載されたものに限定されない」と解釈されるべきである。「有する」という用語は、「有するものとして記載されたものに限定されない」と解釈されるべきである。また、本明細書、及び添付の特許請求の範囲に記載される修飾句「1つの」は、「少なくとも1つ」又は「1又はそれ以上」を意味すると解釈されるべきである。
【符号の説明】
【0158】
1:極端紫外光源装置、100:チャンバ、110:ドライバレーザ光源、120:ターゲット供給部、130:コレクタミラー、300:EUV光源コントローラ、301:リカバリ制御部、302:位置制御部、400:リカバリ部。
【特許請求の範囲】
【請求項1】
レーザ光源と共に用いられるチャンバ装置であって、
前記レーザ光源から出力されるレーザ光を内部に導入するための少なくとも1つの入射口が設けられたチャンバと、
前記チャンバに設けられ、前記チャンバ内の所定の位置にターゲット物質を供給するターゲット供給部と、
所定条件が成立した場合に、前記タ―ゲット供給部に対してリカバリ動作の実行を指示するリカバリ制御部と、
前記リカバリ制御部からの指示に応じて前記リカバリ動作を実行するリカバリ部と、
前記ターゲット供給部から前記チャンバ内に供給されるターゲット物質の位置を計測する位置計測部と、
を備える、チャンバ装置。
【請求項2】
前記リカバリ制御部は、前記ターゲット供給部の起動回数をカウントするカウンタを含み、
前記所定条件は、前記ターゲット供給部の起動回数が所定の起動回数に達したことである、請求項1記載のチャンバ装置。
【請求項3】
前記リカバリ制御部は、リカバリ動作実行からの経過時間を測定するタイマを含み、
前記所定条件は、前回のリカバリ動作の実行から所定の時間が経過したことである、
請求項1記載のチャンバ装置。
【請求項4】
前記リカバリ制御部は、前記ターゲット物質の出力回数をカウントするカウンタを含み、
前記所定条件は、前記ターゲット物質の出力回数が所定の出力回数に達したことである、
請求項1記載のチャンバ装置。
【請求項5】
前記リカバリ制御部には、前記位置計測部による計測結果が入力され、
前記所定条件は、前記チャンバ内に供給されるターゲット物質の位置が所定の位置範囲ことである、
請求項1記載のチャンバ装置。
【請求項6】
前記リカバリ制御部は、
前記所定条件が成立した場合、前記リカバリ動作を実行可能な時期であるか否かを判定し、
前記リカバリ動作を実行可能な時期であると判定した場合、前記リカバリ部に前記リカバリ動作の実行を指示する、
請求項1記載のチャンバ装置。
【請求項7】
前記リカバリ制御部は、
前記リカバリ部が前記ターゲット供給部に対して前記リカバリ動作を実行した後で、前記ターゲット供給部の状態を判定し、
前記ターゲット供給部が正常状態にあると判定した場合、通常モードに移行し、
前記ターゲット供給部が正常状態にないと判定した場合、再度前記リカバリ動作を実行するよう前記リカバリ部に指示する、
請求項1記載のチャンバ装置。
【請求項8】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルに設けられる振動子と、前記振動子に接続された電源を含む、
請求項1記載のチャンバ装置。
【請求項9】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルに設けられるヒータと、前記ヒータに接続された電源とを含む、
請求項1記載のチャンバ装置。
【請求項10】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に設けられるヒータと、前記ヒータに接続された電源とを含む、
請求項1記載のチャンバ装置。
【請求項11】
前記ターゲット供給部には、ヒータと、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物とが設けられ、
前記リカバリ部は、前記中間構造物に設けられる加熱パイプと、前記加熱パイプと前記ターゲット供給部内部とを連通させる流路とを含む、
請求項1記載のチャンバ装置。
【請求項12】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に向けて電磁波を出力する電磁波源を含む、
請求項1記載のチャンバ装置。
【請求項13】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に設けられる少なくとも1つのガスパイプと、該少なくとも1つのガスパイプに接続されたガス源とを含む、
請求項1記載のチャンバ装置。
【請求項14】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物と前記ターゲット供給部端部との間に配置される少なくとも1つのガスパイプと、該少なくとも1つのガスパイプに接続されたガス源とを含む、
請求項1記載のチャンバ装置。
【請求項15】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルの周囲に所定の空間を気密に画定するカバー部と、該所定の空間内に不活性ガスを供給するガス供給部と、前記カバー部を開閉させる開閉機構と、を含む、
請求項1記載のチャンバ装置。
【請求項16】
前記ガス供給部は、前記所定の空間内の圧力を前記ターゲット供給部内部の圧力よりも高くなるように前記所定の空間内にガスを供給する、請求項15記載のチャンバ装置。
【請求項17】
前記ターゲット供給の内部には異物をトラップするためのトラップが設けられている、請求項15記載のチャンバ装置。
【請求項18】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ターゲット供給部の壁部を貫通するよう設けられ、その一端が前記ノズル近傍に延在する吸引管と、該吸引管の他端側に設けられる吸引ポンプと、を含む、
請求項1記載のチャンバ装置。
【請求項19】
前記リカバリ部は、前記他端側に設けられる回収槽をさらに含む、請求項18記載のチャンバ装置。
【請求項20】
前記ターゲット供給部は、ノズルと、該ターゲット供給部内の圧力を制御する圧力制御部と、該ターゲット供給部内部にガスを供給するガス供給部と、を含む、請求項1記載のチャンバ装置。
【請求項21】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記中間構造物の少なくとも表面は、前記中間構造物に対して濡れ性の低い物質から構成される、
請求項1記載のチャンバ装置。
【請求項22】
前記中間構造物は、重力方向に対して傾いて配置される、請求項21記載のチャンバ装置。
【請求項23】
前記物質は、モリブデン(Mo)、タングステン(W)、タンタル(Ta)、チタン(Ti)、ステンレス、ダイヤモンド、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、および酸化タングステンのいずれかを含む物質である、請求項21記載のチャンバ装置。
【請求項24】
前記チャンバは、前記ターゲット供給部と該チャンバ内の前記所定の位置との間に移動可能に配置される捕獲部と、前記捕獲部に接続されたモータと、を含む、請求項1記載のチャンバ装置。
【請求項25】
前記モータは、前記捕獲部を、前記リカバリ動作が実行される際に第1の位置に移動させ、前記リカバリ動作が実行されていない際に第2の位置に移動させる、請求項24記載のチャンバ装置。
【請求項26】
前記チャンバは、前記チャンバ内で前記ターゲット物質に前記レーザ光が照射されて放射される極端紫外光を集光するコレクタミラーと、前記コレクタミラーの反射面側に移動可能に配置される。ミラー保護部と、前記ミラー保護部に接続されたモータと、を含む、請求項1記載のチャンバ装置。
【請求項27】
前記モータは、前記ミラー保護部を、前記リカバリ動作が実行される際に第3の位置に移動させ、前記リカバリ動作が実行されていない際に第4の位置に移動させる、請求項26記載のチャンバ装置。
【請求項28】
チャンバ、ターゲット供給部、リカバリ制御部、リカバリ部および位置計測部を備えるチャンバ装置において、前記タ―ゲット供給部をメンテナンスする方法であって、
前記ターゲット供給部に対してリカバリ動作を実行するか否かの判定用情報を取得することと、
前記リカバリ動作を実行すると判定された際に、前記リカバリ動作が実行可能なタイミングであるか否かを判定することと、
前記リカバリ動作が実行可能なタイミングであると判定された際に、前記リカバリ制御部が前記リカバリ部に前記リカバリ動作を指示することと、
前記リカバリ部が、前記リカバリ制御部の指示に応じて、所定のリカバリ動作を実行することと、
を含む、ターゲット供給部のメンテナンス方法。
【請求項29】
前記リカバリ動作は、前記ターゲット供給部に設けられる部材を加熱することを含む、請求項28記載のメンテナンス方法。
【請求項30】
前記リカバリ動作は、前記ターゲット供給部に不活性ガスを吹きつける、請求項28記載のメンテナンス方法。
【請求項1】
レーザ光源と共に用いられるチャンバ装置であって、
前記レーザ光源から出力されるレーザ光を内部に導入するための少なくとも1つの入射口が設けられたチャンバと、
前記チャンバに設けられ、前記チャンバ内の所定の位置にターゲット物質を供給するターゲット供給部と、
所定条件が成立した場合に、前記タ―ゲット供給部に対してリカバリ動作の実行を指示するリカバリ制御部と、
前記リカバリ制御部からの指示に応じて前記リカバリ動作を実行するリカバリ部と、
前記ターゲット供給部から前記チャンバ内に供給されるターゲット物質の位置を計測する位置計測部と、
を備える、チャンバ装置。
【請求項2】
前記リカバリ制御部は、前記ターゲット供給部の起動回数をカウントするカウンタを含み、
前記所定条件は、前記ターゲット供給部の起動回数が所定の起動回数に達したことである、請求項1記載のチャンバ装置。
【請求項3】
前記リカバリ制御部は、リカバリ動作実行からの経過時間を測定するタイマを含み、
前記所定条件は、前回のリカバリ動作の実行から所定の時間が経過したことである、
請求項1記載のチャンバ装置。
【請求項4】
前記リカバリ制御部は、前記ターゲット物質の出力回数をカウントするカウンタを含み、
前記所定条件は、前記ターゲット物質の出力回数が所定の出力回数に達したことである、
請求項1記載のチャンバ装置。
【請求項5】
前記リカバリ制御部には、前記位置計測部による計測結果が入力され、
前記所定条件は、前記チャンバ内に供給されるターゲット物質の位置が所定の位置範囲ことである、
請求項1記載のチャンバ装置。
【請求項6】
前記リカバリ制御部は、
前記所定条件が成立した場合、前記リカバリ動作を実行可能な時期であるか否かを判定し、
前記リカバリ動作を実行可能な時期であると判定した場合、前記リカバリ部に前記リカバリ動作の実行を指示する、
請求項1記載のチャンバ装置。
【請求項7】
前記リカバリ制御部は、
前記リカバリ部が前記ターゲット供給部に対して前記リカバリ動作を実行した後で、前記ターゲット供給部の状態を判定し、
前記ターゲット供給部が正常状態にあると判定した場合、通常モードに移行し、
前記ターゲット供給部が正常状態にないと判定した場合、再度前記リカバリ動作を実行するよう前記リカバリ部に指示する、
請求項1記載のチャンバ装置。
【請求項8】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルに設けられる振動子と、前記振動子に接続された電源を含む、
請求項1記載のチャンバ装置。
【請求項9】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルに設けられるヒータと、前記ヒータに接続された電源とを含む、
請求項1記載のチャンバ装置。
【請求項10】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に設けられるヒータと、前記ヒータに接続された電源とを含む、
請求項1記載のチャンバ装置。
【請求項11】
前記ターゲット供給部には、ヒータと、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物とが設けられ、
前記リカバリ部は、前記中間構造物に設けられる加熱パイプと、前記加熱パイプと前記ターゲット供給部内部とを連通させる流路とを含む、
請求項1記載のチャンバ装置。
【請求項12】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に向けて電磁波を出力する電磁波源を含む、
請求項1記載のチャンバ装置。
【請求項13】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物に設けられる少なくとも1つのガスパイプと、該少なくとも1つのガスパイプに接続されたガス源とを含む、
請求項1記載のチャンバ装置。
【請求項14】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記リカバリ部は、前記中間構造物と前記ターゲット供給部端部との間に配置される少なくとも1つのガスパイプと、該少なくとも1つのガスパイプに接続されたガス源とを含む、
請求項1記載のチャンバ装置。
【請求項15】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ノズルの周囲に所定の空間を気密に画定するカバー部と、該所定の空間内に不活性ガスを供給するガス供給部と、前記カバー部を開閉させる開閉機構と、を含む、
請求項1記載のチャンバ装置。
【請求項16】
前記ガス供給部は、前記所定の空間内の圧力を前記ターゲット供給部内部の圧力よりも高くなるように前記所定の空間内にガスを供給する、請求項15記載のチャンバ装置。
【請求項17】
前記ターゲット供給の内部には異物をトラップするためのトラップが設けられている、請求項15記載のチャンバ装置。
【請求項18】
前記ターゲット供給部にはノズルが設けられており、
前記リカバリ部は、前記ターゲット供給部の壁部を貫通するよう設けられ、その一端が前記ノズル近傍に延在する吸引管と、該吸引管の他端側に設けられる吸引ポンプと、を含む、
請求項1記載のチャンバ装置。
【請求項19】
前記リカバリ部は、前記他端側に設けられる回収槽をさらに含む、請求項18記載のチャンバ装置。
【請求項20】
前記ターゲット供給部は、ノズルと、該ターゲット供給部内の圧力を制御する圧力制御部と、該ターゲット供給部内部にガスを供給するガス供給部と、を含む、請求項1記載のチャンバ装置。
【請求項21】
前記ターゲット供給部には、該ターゲット供給部と前記チャンバ内の前記所定の位置との間に位置するよう配置される中間構造物が設けられ、
前記中間構造物の少なくとも表面は、前記中間構造物に対して濡れ性の低い物質から構成される、
請求項1記載のチャンバ装置。
【請求項22】
前記中間構造物は、重力方向に対して傾いて配置される、請求項21記載のチャンバ装置。
【請求項23】
前記物質は、モリブデン(Mo)、タングステン(W)、タンタル(Ta)、チタン(Ti)、ステンレス、ダイヤモンド、炭化珪素、窒化珪素、酸化アルミニューム、酸化ジルコニューム、ダイヤモンド、酸化珪素、酸化モリブデン、酸化タンタル、および酸化タングステンのいずれかを含む物質である、請求項21記載のチャンバ装置。
【請求項24】
前記チャンバは、前記ターゲット供給部と該チャンバ内の前記所定の位置との間に移動可能に配置される捕獲部と、前記捕獲部に接続されたモータと、を含む、請求項1記載のチャンバ装置。
【請求項25】
前記モータは、前記捕獲部を、前記リカバリ動作が実行される際に第1の位置に移動させ、前記リカバリ動作が実行されていない際に第2の位置に移動させる、請求項24記載のチャンバ装置。
【請求項26】
前記チャンバは、前記チャンバ内で前記ターゲット物質に前記レーザ光が照射されて放射される極端紫外光を集光するコレクタミラーと、前記コレクタミラーの反射面側に移動可能に配置される。ミラー保護部と、前記ミラー保護部に接続されたモータと、を含む、請求項1記載のチャンバ装置。
【請求項27】
前記モータは、前記ミラー保護部を、前記リカバリ動作が実行される際に第3の位置に移動させ、前記リカバリ動作が実行されていない際に第4の位置に移動させる、請求項26記載のチャンバ装置。
【請求項28】
チャンバ、ターゲット供給部、リカバリ制御部、リカバリ部および位置計測部を備えるチャンバ装置において、前記タ―ゲット供給部をメンテナンスする方法であって、
前記ターゲット供給部に対してリカバリ動作を実行するか否かの判定用情報を取得することと、
前記リカバリ動作を実行すると判定された際に、前記リカバリ動作が実行可能なタイミングであるか否かを判定することと、
前記リカバリ動作が実行可能なタイミングであると判定された際に、前記リカバリ制御部が前記リカバリ部に前記リカバリ動作を指示することと、
前記リカバリ部が、前記リカバリ制御部の指示に応じて、所定のリカバリ動作を実行することと、
を含む、ターゲット供給部のメンテナンス方法。
【請求項29】
前記リカバリ動作は、前記ターゲット供給部に設けられる部材を加熱することを含む、請求項28記載のメンテナンス方法。
【請求項30】
前記リカバリ動作は、前記ターゲット供給部に不活性ガスを吹きつける、請求項28記載のメンテナンス方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図14A】
【図14B】
【図15】

【図16A】
【図16B】

【図17A】
【図17B】
【図18】
【図19】
【図20A】
【図20B】
【図21A】
【図21B】
【図22A】
【図22B】
【図23A】
【図23B】
【図23C】
【図24】
【図25A】
【図25B】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図14A】
【図14B】
【図15】
【図16A】
【図16B】
【図17A】
【図17B】
【図18】
【図19】
【図20A】
【図20B】
【図21A】
【図21B】
【図22A】
【図22B】
【図23A】
【図23B】
【図23C】
【図24】
【図25A】
【図25B】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2011−216860(P2011−216860A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2011−13014(P2011−13014)
【出願日】平成23年1月25日(2011.1.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度 独立行政法人新エネルギー・産業技術開発機構「次世代半導体材料・プロセス基盤(MIRAI)プロジェクト/次世代半導体材料・プロセス基盤(MIRAI)プロジェクト(石特会計)/EUV光源高信頼化技術開発」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000001236)株式会社小松製作所 (1,686)
【出願人】(300073919)ギガフォトン株式会社 (227)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成23年1月25日(2011.1.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度 独立行政法人新エネルギー・産業技術開発機構「次世代半導体材料・プロセス基盤(MIRAI)プロジェクト/次世代半導体材料・プロセス基盤(MIRAI)プロジェクト(石特会計)/EUV光源高信頼化技術開発」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000001236)株式会社小松製作所 (1,686)
【出願人】(300073919)ギガフォトン株式会社 (227)
【Fターム(参考)】
[ Back to top ]