
構造物の解体施工向け油圧ジャッキのストローク制御方法
【課題】下端部を切断除去した柱を支持する全ての油圧ジャッキ同士の下降量の相対ストローク値の偏差を許容値以内に収めることができる油圧ジャッキのストローク制御方法を提供する。
【解決手段】ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行う。
【解決手段】ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際、下降工程で下降を開始した全ての油圧ジャッキ同士の下降量の偏差を許容値以内に収めることができる構造物の解体施工向け油圧ジャッキのストローク制御方法に関する。
【背景技術】
【0002】
高層ビルなどに代表される構造物の解体施工は、解体重機を最上階に設置して、床開口部から解体材を落とす方法、クレーン等の揚重設備を設けて、揚重設備で解体材を下ろす方法で普通行われる。一方、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行えば、低騒音・低振動で構造物の解体施工ができる。図1を用い、切断・下降させる工法について説明しておく。
【0003】
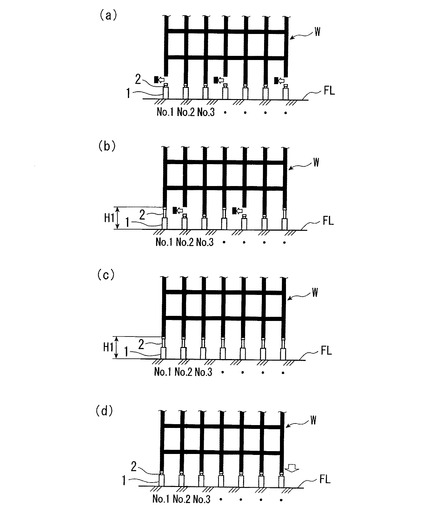
切断・下降させる工法とは、解体施工を行う構造物Wの柱の下部に、ジャッキセット工程で油圧ジャッキ1を縮めた状態(ロッド2を下降させた状態)でセットし、次いで切断工程と下降工程とを繰り返し行う解体施工法の一種である。図1(b)、(c)中、H1は、切断除去されたNo.1柱の下端レベルである。
切断工程では、図1(a)、(b)に示したように、解体施工を行う構造物Wの柱の下端部を全部切断除去するため、ある間隔をおいて、構造物Wの柱の下部にセットした油圧ジャッキ1のロッド2をさらに下降させ、切断対象の柱を浮かせてから柱の下端部を切断除去することと、切断除去した柱の下端レベルまで油圧ジャッキ1のロッド2を上昇させ、構造物Wの柱を油圧ジャッキ1で支持した状態とすることを行う。
【0004】
切断工程に続く下降工程では、図1(c)、(d)に示したように、構造物全体を油圧ジャッキ1で支えたまま、一斉に油圧ジャッキ1のロッド2の下降を開始し、構造物全体の高さを低くすることを行う。なお、切断工程においては、ロッド2の状況把握に用いるため、その前のジャッキセット工程で、ストロークエンドを基準とした絶対ストローク値を計測しておくことが重要である。
【0005】
一方下降工程では、一斉に下降を開始した油圧ジャッキ同士の下降量の偏差(相対ストローク値の偏差)を許容値以内に収めることが重要である。
ところが、構造物の解体施工向け油圧ジャッキは大容量(ロッドで支える質量:1200トン程度)であり、仕様最大ストローク値が700mmを超える場合もあるから、下降工程中、相対ストローク値の偏差を数ミリ程度に制御するのは難しい。このような場合には、構造物に柱を介して無理な力が加わり、危険な状態となる。なお、絶対ストローク値に対し、相対ストローク値とは、切断除去した柱の下端レベルを基準としたときの、各油圧ジャッキ1のロッド2の下降量を意味する。
【0006】
ここで、対象物の挙動に応じて油圧ジャッキの制御則を柔軟に更新することを可能にする油圧ジャッキ制御システムが特許文献1に開示されている。
この特許文献1に開示の油圧ジャッキ制御システムは、初期条件として、制御の段階を示すステップ数、最終制御目標値、許容誤差、停止条件などを入力し、入力した初期値、任意の計測値および指定値に基づいて、制御則あるいは最終制御目標値を算出し、対象ステップの制御目標値と現在の状態(計測値あるいは演算値)との偏差が、許容誤差範囲内となるまで油圧ジャッキの制御を行う構成としている。
【0007】
油圧ジャッキの制御則には、荷重制御と変位制御(ストローク制御という)とがあり、下降工程では、油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めるストローク制御方法が必要である。
【特許文献1】特開2006-103936号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載の油圧ジャッキ制御システムは、切断・下降させる工法により、構造物の解体施工を行う際の特殊性が考慮されておらず、制御則に荷重制御と変位制御のどちらを用いるか、算出して決定するとしている。
すなわち、下降工程で荷重制御により、油圧ジャッキを制御した場合、相対ストローク値の偏差を数ミリ程度に制御するのは難しいという問題があった。さらに切断工程では切断除去された柱の下端レベルに誤差が生じることは避けられず、これを避けようとすると、構造物の解体施工が安全かつ効率的に行うことができないという特殊性もある。
【0009】
また、下端部を切断除去する柱の高さレベルに誤差が生じることを前提とした場合、ストロークエンドを基準とした絶対ストローク値で油圧ジャッキのストローク制御を行おうとすると、制御ロジックが複雑になるという問題もある。
本発明は、上記従来技術の問題点を解消し、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じることを前提とし、下降工程で下端部を切断除去した柱を支持する全ての油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めることができる構造物の解体施工向け油圧ジャッキのストローク制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明者らは、切断・下降させる工法により、構造物の解体施工を行う際、油圧ジャッキのストローク制御について鋭意検討した結果、ジャッキセット工程の後の切断工程に続く、下降工程ごとに、相対ストローク値検出のためのゼロ点の設定を行い、検出した相対ストローク値に基づき、油圧ジャッキのストローク制御を行うことにより、上記した課題を解決できることを見出し、この知見に基づいて本発明をなすに至った。
【0011】
すなわち本発明は、以下のとおりである。
1.構造物の柱の下端にセットされた油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際の構造物の解体施工向け油圧ジャッキのストローク制御方法であって、ジャッキセット工程では、ロッドの状況把握に用いる、ストロークエンドを基準とする絶対ストローク値検出のためのゼロ点の設定を行うとともに、前記ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うことを特徴とする構造物の解体施工向け油圧ジャッキのストローク制御方法。
2.前記下降工程で、検出した相対ストローク値の表示処理を行うことを特徴とする上記1.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
3.前記下降工程で、検出した絶対ストローク値の表示処理を行うことを特徴とする上記1.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
4.前記下降工程で、検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことを特徴とする上記3.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
5.前記下降工程で、前記油圧ジャッキに柱から作用する支持荷重を検出するのに、前記油圧ジャッキのロッド側シリンダ室の圧力を検出するロッド側の圧力センサを設けるともに、前記油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサを、パイロットチェックバルブよりもヘッド側シリンダ室に近い圧油通路に連通して設けることを特徴とすることを特徴とする上記1.〜4.のいずれか1項に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【発明の効果】
【0012】
本発明によれば、下降工程で、下端部を切断除去した柱を支持する全ての油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めることができる。したがって、構造物の解体作業が安全にかつ効率的に行える。
【発明を実施するための最良の形態】
【0013】
まず、本発明法に用いて好適な、構造物の解体施工向け油圧ジャッキ(以下、単に油圧ジャッキともいう)について説明する。
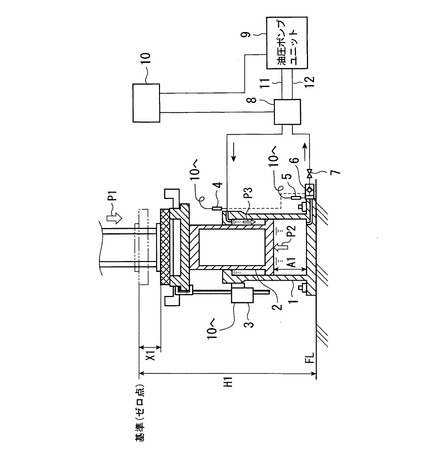
図2は、本発明法に用いて好適な油圧ジャッキの構成を示す一部断面を含む構成図である。ロッド2を上昇・下降させる油圧ジャッキ1は、ストローク検出器3、圧力センサ4、5、パイロットチェックバルブ6およびストップバルブ7を具備する。普通、複数台の油圧ジャッキ1に対して1台の油圧ポンプユニット9がバルブスタンド8を介して接続される。11、12は油圧ポンプユニット9とバルブスタンド8とを接続する配管で、一方が圧油を油圧ジャッキ1へ供給する圧油供給配管、他方が油圧ジャッキ1から油を戻すタンク戻り配管である。
【0014】
なお、図2中、油圧ジャッキ1のパイロットチェックバルブ6が開となり、その結果、ヘッド側シリンダ室内の圧油が、バルブスタンド8に内蔵されている流量調整弁を介して油圧ポンプユニット9へ戻されている油の流れを示した。パイロットチェックバルブ6は、油圧ジャッキ1のロッド側シリンダ室内へ供給される圧油のパイロット圧によって開閉される。すなわち、下降工程で油圧ジャッキ1のロッド2を一斉に下降させるには、油圧ポンプユニット9を運転し、油圧ジャッキ制御手段10からの制御信号により、流量調整弁が内蔵されているバルブスタンド8を操作し、油圧ジャッキ1のロッド側シリンダ室内へ圧油を供給すると同時にパイロットチェックバルブ6を開とする。
【0015】
ここで、油圧ジャッキ1のストローク検出器3にはロータリーエンコーダが内蔵されており、ストロークエンドを基準(ゼロ点)とした絶対ストローク値、および切断除去された柱の下端レベルまでロッド2を上昇させた状態を基準(ゼロ点)とした相対ストローク値を高精度に検出できる。つまり、油圧ジャッキ1のシリンダとロッド2間に配置したラックに噛み合うピニオンにより、ロッド2の上昇量および下降量に見合う回転がロータリーエンコーダに伝えられる構造となっているため、ストロークエンドあるいは切断除去された柱の下端レベルまでロッド2を上昇させた状態で、ロータリーエンコーダの基準回転位置情報を油圧ジャッキ制御手段10に保存しておくゼロ点の設定を行うことにより、上記検出が達成できる。
【0016】
絶対ストローク値検出のためのゼロ点の設定は、切断工程と下降工程を繰り返す前のジャッキセット工程で各油圧ジャッキを縮めた状態で構造物の柱の下端にセットしてから行う。また、相対ストローク値検出のためのゼロ点の設定は、一斉に油圧ジャッキのロッドを下降させる下降工程を開始する前に、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で行う。
【0017】
図2中、A1は、No.1柱を支持する油圧ジャッキ1の絶対ストローク値を、X1は、No.1柱を支持する油圧ジャッキ1の相対ストローク値をそれぞれ示した。なお、絶対ストローク値検出用の基準回転位置情報は切断・下降させる工法により、構造物の解体施工が完了するまでの間、油圧ジャッキ制御手段10に保存しておく必要がある。一方相対ストローク値検出用の基準回転位置情報は、任意の下降工程が終了したら、その次の下降工程のために書き換える。
【0018】
ここで、ストローク値検出用の基準回転位置情報を保存する油圧ジャッキ制御手段10は、制御コンピュータやパーソナルコンピュータなどを用いることができ、解体施工に用いる各種検出機器と接続され、各種油圧機器をそのコントロール下に置いている。
しかし、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じること、切断除去された柱の下端を支える油圧ジャッキ1ごとに支持荷重が異なること、油圧ジャッキ1には機差があることなどによって、切断工程に続き、構造物全体を油圧ジャッキで支持したまま、一斉に油圧ジャッキのロッドを下降させると、それ以降、相対ストローク値の偏差が徐々に大きくなる。
【0019】
このため、任意の下降工程では、下降速度が最も早い油圧ジャッキと、下降速度が最も遅い油圧ジャッキとが生じるから、油圧ジャッキのストローク制御を行わないと、相対ストローク値の偏差が許容値を超えてしまう。
そこで、本発明法は、一斉に油圧ジャッキのロッドを下降させる下降工程の前に、下降工程ごとに、相対ストローク値検出のための、各油圧ジャッキのゼロ点の設定を行い、所定の検出周期で検出した相対ストローク値に基づき、下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うようにした。本発明法の好適な処理フローを図3に示した。
【0020】
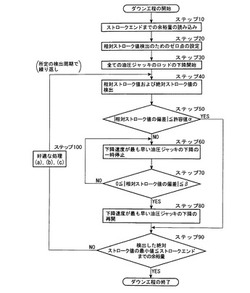
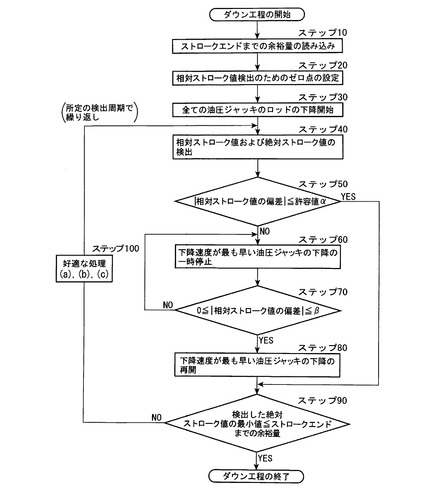
ステップ10ではストロークエンドまでの余裕量の読み込みを行い、ステップ20で相対ストローク値を検出するための、各油圧ジャッキのゼロ点の設定および下降量の検出周期の設定を行い、次いでステップ30で全ての油圧ジャッキのロッドの下降を開始する。ステップ30以降は、下降量の検出周期で以下の処理を繰り返し行う。
ステップ40では前記したようにストローク検出器3によって、ゼロ点を基準とした各油圧ジャッキのロッドの下降量(相対ストローク値)の検出を行い、検出した相対ストローク値に基づき、ステップ50で、│相対ストローク値の偏差│≦許容値αを満たしているか、否かという判定処理を行う。この判定条件を満たしていないときに、ステップ60に進む。
【0021】
ステップ60では下降速度が最も早い油圧ジャッキの下降を一時停止する処理を行い、ステップ70では、一時停止させた、下降速度が最も早い油圧ジャッキの下降を再開するか、否かという判定を行う。この場合、下降の再開設定値β:0≦β<αとし、0≦│相対ストローク値の偏差│≦βを満たさないときにはステップ60に戻り、一時停止を継続し、0≦│相対ストローク値の偏差│≦βを満たすようになったときには、ステップ80に進み、ステップ80で下降速度が最も早い油圧ジャッキの下降を再開する処理を行う。
【0022】
一方、ステップ50で│相対ストローク値の偏差│≦許容値αを満たしていると、判定されたときには、ステップ90に進む。ステップ90では、検出した絶対ストローク値の最小値≦ストロークエンドまでの余裕量を満たしたときに下降工程を終了し、それを満たしていないときには、ステップ40に戻る。
ここで、ステップ50で│相対ストローク値の偏差│≦許容値αを満たしていないときに、ステップ60に進み、ステップ60で下降速度が最も早い油圧ジャッキの下降を一時停止する処理を行う理由は、この一時停止する処理を行わない場合、ますます、│相対ストローク値の偏差│が大きくなり、構造物に柱を介して無理な力が加わり、危険な状態となるからである。
【0023】
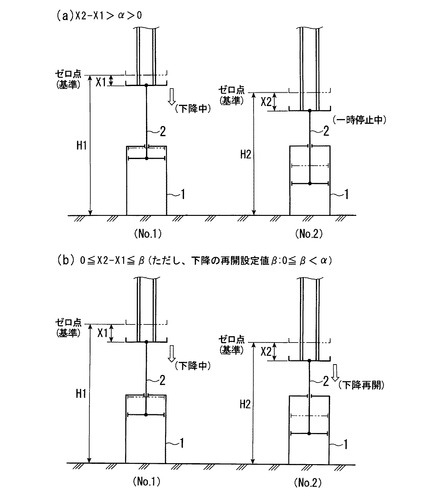
なお、図4(a)には、ある下降工程で、切断除去された柱の下端レベルまでロッド2を上昇させた状態から、一斉に各油圧ジャッキ1のロッド2を下降させた以降、所定の検出周期で検出した相対ストローク値に基づき、No.1柱を支える油圧ジャッキの下降速度が最も遅いこと、およびNo.2柱を支える油圧ジャッキの下降速度が最も早いことが油圧ジャッキ制御手段10によって認識され、任意の時点で、X2−X1>α>0となり、No.2柱を支える油圧ジャッキ1のロッド2の下降を一時停止したときの状態を示した。
【0024】
図4中、H1、H2はNo.1、No.2柱の下端レベル、X1、X2は、下端レベルH1、H2をゼロ点(基準)としたときの相対ストローク値である。
また、図4(b)には、No.2柱を支える油圧ジャッキ1のロッド2の下降を一時停止している間に、0≦X2−X1≦βとなり、一時停止したNo.2柱を支える油圧ジャッキ1のロッド2の下降を再開したときの状態を示した。
【0025】
ただし、ある下降工程で、図1(c)、(d)に示した、解体施工を行う構造物Wの柱を支持する油圧ジャッキ1のうち、どのロッド2の下降速度が最も早いのか、どのロッド2の下降速度が最も遅いのかということは、No.1、No.2、No.3・・・の油圧ジャッキ1の相対ストローク値を所定の検出周期で検出し、油圧ジャッキ制御手段10で相互比較することで決定できる(図2参照)。
【0026】
以上のような本発明法によれば、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じることを前提とし、下降工程で、下降を開始した全ての油圧ジャッキ同士の下降量の偏差を許容値以内に収めることができる。したがって、構造物の解体作業が安全にかつ効率的に行える。
ここで、図3に示した本発明法の好適なフローにおいて、ステップ100で行う好適な処理(a)、(b)、(c)は次のとおりである。
【0027】
(a):下降工程で、切断除去された柱の下端レベルまでロッド2を上昇させた状態を基準(ゼロ点)とする、各油圧ジャッキの相対ストローク値を検出し、検出した相対ストローク値の表示処理を行うこと。(b):下降工程で、ストロークエンドを基準(ゼロ点)とする、絶対ストローク値を検出し、検出した絶対ストローク値の表示処理を行うこと。(c):検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うこと。ただし、余裕量は、油圧ジャッキ制御手段10に構造物の解体作業を行う前に予め設定しておく。
【0028】
このような処理を行うようにすれば、油圧ジャッキ制御手段10によって行われているストローク制御の目視、警報による確認、非常停止などができ、切断・下降させる工法による構造物の解体施工作業がより安全かつ効率的に行うことができる。また、切断工程において、絶対ストローク値の表示処理を行うこと、絶対ストローク値に基づき、警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことがより好ましい。
【0029】
また、下降工程で、柱を支持する油圧ジャッキに作用する支持荷重を検出するのに、図2に示したように、油圧ジャッキ1のロッド側シリンダ室の圧力を検出するロッド側の圧力センサ4を設けるともに、油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサ5を、パイロットチェックバルブ6よりもヘッド側シリンダ室に近い圧油通路に連通して設ける必要がある。
【0030】
このように圧力センサ4、5を設けることによって、別な油圧ジャッキを設置し、あるいは柱とそれを支持する油圧ジャッキ1間にロードセルを設置せずに、式(1)に基づき、下降工程で、支持荷重P1を検出することができる。
支持荷重P1=P2−P3 ・・・・・・・・(1)
ただし、P2:ヘッド側の油圧による揚力、P3:ロッド側の油圧による下降力。
【実施例】
【0031】
1200トンもの質量を支えることができる油圧ジャッキを44台使用し、切断・下降させる工法により、1号棟、2号棟からなる高層ビルの解体施工を行った。本発明法を適用することで、相対ストローク値に基づき下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値α以内とする油圧ジャッキのストローク制御を行うことができ、その結果、1号棟、2号棟からなる高層ビルの解体作業を安全かつ効率的に行うことができた。許容値αは、高層ビルに応じて設定した。
【図面の簡単な説明】
【0032】
【図1】切断・下降させる工法の工程図である。
【図2】本発明法に用いて好適な油圧ジャッキの構成を示す一部断面を含む構成図である。
【図3】本発明法の好適な処理フロー図である。
【図4】本発明法を示す部分正面図である。
【符号の説明】
【0033】
W 構造物
H1、H2 No.1、No.2柱の下端レベル
A1 絶対ストローク値
X1、X2 相対ストローク値
P1 支持荷重
P2 ヘッド側の油圧による揚力
P3 ロッド側の油圧による下降力
1 油圧ジャッキ
2 ロッド
3 ストローク検出器
4、5 圧力センサ
6 パイロットチェックバルブ
7 ストップバルブ
8 バルブスタンド(流量調整弁を内蔵)
9 油圧ポンプユニット
10 油圧ジャッキ制御手段
11、12 配管
【技術分野】
【0001】
本発明は、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際、下降工程で下降を開始した全ての油圧ジャッキ同士の下降量の偏差を許容値以内に収めることができる構造物の解体施工向け油圧ジャッキのストローク制御方法に関する。
【背景技術】
【0002】
高層ビルなどに代表される構造物の解体施工は、解体重機を最上階に設置して、床開口部から解体材を落とす方法、クレーン等の揚重設備を設けて、揚重設備で解体材を下ろす方法で普通行われる。一方、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行えば、低騒音・低振動で構造物の解体施工ができる。図1を用い、切断・下降させる工法について説明しておく。
【0003】
切断・下降させる工法とは、解体施工を行う構造物Wの柱の下部に、ジャッキセット工程で油圧ジャッキ1を縮めた状態(ロッド2を下降させた状態)でセットし、次いで切断工程と下降工程とを繰り返し行う解体施工法の一種である。図1(b)、(c)中、H1は、切断除去されたNo.1柱の下端レベルである。
切断工程では、図1(a)、(b)に示したように、解体施工を行う構造物Wの柱の下端部を全部切断除去するため、ある間隔をおいて、構造物Wの柱の下部にセットした油圧ジャッキ1のロッド2をさらに下降させ、切断対象の柱を浮かせてから柱の下端部を切断除去することと、切断除去した柱の下端レベルまで油圧ジャッキ1のロッド2を上昇させ、構造物Wの柱を油圧ジャッキ1で支持した状態とすることを行う。
【0004】
切断工程に続く下降工程では、図1(c)、(d)に示したように、構造物全体を油圧ジャッキ1で支えたまま、一斉に油圧ジャッキ1のロッド2の下降を開始し、構造物全体の高さを低くすることを行う。なお、切断工程においては、ロッド2の状況把握に用いるため、その前のジャッキセット工程で、ストロークエンドを基準とした絶対ストローク値を計測しておくことが重要である。
【0005】
一方下降工程では、一斉に下降を開始した油圧ジャッキ同士の下降量の偏差(相対ストローク値の偏差)を許容値以内に収めることが重要である。
ところが、構造物の解体施工向け油圧ジャッキは大容量(ロッドで支える質量:1200トン程度)であり、仕様最大ストローク値が700mmを超える場合もあるから、下降工程中、相対ストローク値の偏差を数ミリ程度に制御するのは難しい。このような場合には、構造物に柱を介して無理な力が加わり、危険な状態となる。なお、絶対ストローク値に対し、相対ストローク値とは、切断除去した柱の下端レベルを基準としたときの、各油圧ジャッキ1のロッド2の下降量を意味する。
【0006】
ここで、対象物の挙動に応じて油圧ジャッキの制御則を柔軟に更新することを可能にする油圧ジャッキ制御システムが特許文献1に開示されている。
この特許文献1に開示の油圧ジャッキ制御システムは、初期条件として、制御の段階を示すステップ数、最終制御目標値、許容誤差、停止条件などを入力し、入力した初期値、任意の計測値および指定値に基づいて、制御則あるいは最終制御目標値を算出し、対象ステップの制御目標値と現在の状態(計測値あるいは演算値)との偏差が、許容誤差範囲内となるまで油圧ジャッキの制御を行う構成としている。
【0007】
油圧ジャッキの制御則には、荷重制御と変位制御(ストローク制御という)とがあり、下降工程では、油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めるストローク制御方法が必要である。
【特許文献1】特開2006-103936号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載の油圧ジャッキ制御システムは、切断・下降させる工法により、構造物の解体施工を行う際の特殊性が考慮されておらず、制御則に荷重制御と変位制御のどちらを用いるか、算出して決定するとしている。
すなわち、下降工程で荷重制御により、油圧ジャッキを制御した場合、相対ストローク値の偏差を数ミリ程度に制御するのは難しいという問題があった。さらに切断工程では切断除去された柱の下端レベルに誤差が生じることは避けられず、これを避けようとすると、構造物の解体施工が安全かつ効率的に行うことができないという特殊性もある。
【0009】
また、下端部を切断除去する柱の高さレベルに誤差が生じることを前提とした場合、ストロークエンドを基準とした絶対ストローク値で油圧ジャッキのストローク制御を行おうとすると、制御ロジックが複雑になるという問題もある。
本発明は、上記従来技術の問題点を解消し、油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じることを前提とし、下降工程で下端部を切断除去した柱を支持する全ての油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めることができる構造物の解体施工向け油圧ジャッキのストローク制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明者らは、切断・下降させる工法により、構造物の解体施工を行う際、油圧ジャッキのストローク制御について鋭意検討した結果、ジャッキセット工程の後の切断工程に続く、下降工程ごとに、相対ストローク値検出のためのゼロ点の設定を行い、検出した相対ストローク値に基づき、油圧ジャッキのストローク制御を行うことにより、上記した課題を解決できることを見出し、この知見に基づいて本発明をなすに至った。
【0011】
すなわち本発明は、以下のとおりである。
1.構造物の柱の下端にセットされた油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際の構造物の解体施工向け油圧ジャッキのストローク制御方法であって、ジャッキセット工程では、ロッドの状況把握に用いる、ストロークエンドを基準とする絶対ストローク値検出のためのゼロ点の設定を行うとともに、前記ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うことを特徴とする構造物の解体施工向け油圧ジャッキのストローク制御方法。
2.前記下降工程で、検出した相対ストローク値の表示処理を行うことを特徴とする上記1.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
3.前記下降工程で、検出した絶対ストローク値の表示処理を行うことを特徴とする上記1.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
4.前記下降工程で、検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことを特徴とする上記3.に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
5.前記下降工程で、前記油圧ジャッキに柱から作用する支持荷重を検出するのに、前記油圧ジャッキのロッド側シリンダ室の圧力を検出するロッド側の圧力センサを設けるともに、前記油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサを、パイロットチェックバルブよりもヘッド側シリンダ室に近い圧油通路に連通して設けることを特徴とすることを特徴とする上記1.〜4.のいずれか1項に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【発明の効果】
【0012】
本発明によれば、下降工程で、下端部を切断除去した柱を支持する全ての油圧ジャッキ同士の下降量の偏差、すなわち相対ストローク値の偏差を許容値以内に収めることができる。したがって、構造物の解体作業が安全にかつ効率的に行える。
【発明を実施するための最良の形態】
【0013】
まず、本発明法に用いて好適な、構造物の解体施工向け油圧ジャッキ(以下、単に油圧ジャッキともいう)について説明する。
図2は、本発明法に用いて好適な油圧ジャッキの構成を示す一部断面を含む構成図である。ロッド2を上昇・下降させる油圧ジャッキ1は、ストローク検出器3、圧力センサ4、5、パイロットチェックバルブ6およびストップバルブ7を具備する。普通、複数台の油圧ジャッキ1に対して1台の油圧ポンプユニット9がバルブスタンド8を介して接続される。11、12は油圧ポンプユニット9とバルブスタンド8とを接続する配管で、一方が圧油を油圧ジャッキ1へ供給する圧油供給配管、他方が油圧ジャッキ1から油を戻すタンク戻り配管である。
【0014】
なお、図2中、油圧ジャッキ1のパイロットチェックバルブ6が開となり、その結果、ヘッド側シリンダ室内の圧油が、バルブスタンド8に内蔵されている流量調整弁を介して油圧ポンプユニット9へ戻されている油の流れを示した。パイロットチェックバルブ6は、油圧ジャッキ1のロッド側シリンダ室内へ供給される圧油のパイロット圧によって開閉される。すなわち、下降工程で油圧ジャッキ1のロッド2を一斉に下降させるには、油圧ポンプユニット9を運転し、油圧ジャッキ制御手段10からの制御信号により、流量調整弁が内蔵されているバルブスタンド8を操作し、油圧ジャッキ1のロッド側シリンダ室内へ圧油を供給すると同時にパイロットチェックバルブ6を開とする。
【0015】
ここで、油圧ジャッキ1のストローク検出器3にはロータリーエンコーダが内蔵されており、ストロークエンドを基準(ゼロ点)とした絶対ストローク値、および切断除去された柱の下端レベルまでロッド2を上昇させた状態を基準(ゼロ点)とした相対ストローク値を高精度に検出できる。つまり、油圧ジャッキ1のシリンダとロッド2間に配置したラックに噛み合うピニオンにより、ロッド2の上昇量および下降量に見合う回転がロータリーエンコーダに伝えられる構造となっているため、ストロークエンドあるいは切断除去された柱の下端レベルまでロッド2を上昇させた状態で、ロータリーエンコーダの基準回転位置情報を油圧ジャッキ制御手段10に保存しておくゼロ点の設定を行うことにより、上記検出が達成できる。
【0016】
絶対ストローク値検出のためのゼロ点の設定は、切断工程と下降工程を繰り返す前のジャッキセット工程で各油圧ジャッキを縮めた状態で構造物の柱の下端にセットしてから行う。また、相対ストローク値検出のためのゼロ点の設定は、一斉に油圧ジャッキのロッドを下降させる下降工程を開始する前に、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で行う。
【0017】
図2中、A1は、No.1柱を支持する油圧ジャッキ1の絶対ストローク値を、X1は、No.1柱を支持する油圧ジャッキ1の相対ストローク値をそれぞれ示した。なお、絶対ストローク値検出用の基準回転位置情報は切断・下降させる工法により、構造物の解体施工が完了するまでの間、油圧ジャッキ制御手段10に保存しておく必要がある。一方相対ストローク値検出用の基準回転位置情報は、任意の下降工程が終了したら、その次の下降工程のために書き換える。
【0018】
ここで、ストローク値検出用の基準回転位置情報を保存する油圧ジャッキ制御手段10は、制御コンピュータやパーソナルコンピュータなどを用いることができ、解体施工に用いる各種検出機器と接続され、各種油圧機器をそのコントロール下に置いている。
しかし、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じること、切断除去された柱の下端を支える油圧ジャッキ1ごとに支持荷重が異なること、油圧ジャッキ1には機差があることなどによって、切断工程に続き、構造物全体を油圧ジャッキで支持したまま、一斉に油圧ジャッキのロッドを下降させると、それ以降、相対ストローク値の偏差が徐々に大きくなる。
【0019】
このため、任意の下降工程では、下降速度が最も早い油圧ジャッキと、下降速度が最も遅い油圧ジャッキとが生じるから、油圧ジャッキのストローク制御を行わないと、相対ストローク値の偏差が許容値を超えてしまう。
そこで、本発明法は、一斉に油圧ジャッキのロッドを下降させる下降工程の前に、下降工程ごとに、相対ストローク値検出のための、各油圧ジャッキのゼロ点の設定を行い、所定の検出周期で検出した相対ストローク値に基づき、下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うようにした。本発明法の好適な処理フローを図3に示した。
【0020】
ステップ10ではストロークエンドまでの余裕量の読み込みを行い、ステップ20で相対ストローク値を検出するための、各油圧ジャッキのゼロ点の設定および下降量の検出周期の設定を行い、次いでステップ30で全ての油圧ジャッキのロッドの下降を開始する。ステップ30以降は、下降量の検出周期で以下の処理を繰り返し行う。
ステップ40では前記したようにストローク検出器3によって、ゼロ点を基準とした各油圧ジャッキのロッドの下降量(相対ストローク値)の検出を行い、検出した相対ストローク値に基づき、ステップ50で、│相対ストローク値の偏差│≦許容値αを満たしているか、否かという判定処理を行う。この判定条件を満たしていないときに、ステップ60に進む。
【0021】
ステップ60では下降速度が最も早い油圧ジャッキの下降を一時停止する処理を行い、ステップ70では、一時停止させた、下降速度が最も早い油圧ジャッキの下降を再開するか、否かという判定を行う。この場合、下降の再開設定値β:0≦β<αとし、0≦│相対ストローク値の偏差│≦βを満たさないときにはステップ60に戻り、一時停止を継続し、0≦│相対ストローク値の偏差│≦βを満たすようになったときには、ステップ80に進み、ステップ80で下降速度が最も早い油圧ジャッキの下降を再開する処理を行う。
【0022】
一方、ステップ50で│相対ストローク値の偏差│≦許容値αを満たしていると、判定されたときには、ステップ90に進む。ステップ90では、検出した絶対ストローク値の最小値≦ストロークエンドまでの余裕量を満たしたときに下降工程を終了し、それを満たしていないときには、ステップ40に戻る。
ここで、ステップ50で│相対ストローク値の偏差│≦許容値αを満たしていないときに、ステップ60に進み、ステップ60で下降速度が最も早い油圧ジャッキの下降を一時停止する処理を行う理由は、この一時停止する処理を行わない場合、ますます、│相対ストローク値の偏差│が大きくなり、構造物に柱を介して無理な力が加わり、危険な状態となるからである。
【0023】
なお、図4(a)には、ある下降工程で、切断除去された柱の下端レベルまでロッド2を上昇させた状態から、一斉に各油圧ジャッキ1のロッド2を下降させた以降、所定の検出周期で検出した相対ストローク値に基づき、No.1柱を支える油圧ジャッキの下降速度が最も遅いこと、およびNo.2柱を支える油圧ジャッキの下降速度が最も早いことが油圧ジャッキ制御手段10によって認識され、任意の時点で、X2−X1>α>0となり、No.2柱を支える油圧ジャッキ1のロッド2の下降を一時停止したときの状態を示した。
【0024】
図4中、H1、H2はNo.1、No.2柱の下端レベル、X1、X2は、下端レベルH1、H2をゼロ点(基準)としたときの相対ストローク値である。
また、図4(b)には、No.2柱を支える油圧ジャッキ1のロッド2の下降を一時停止している間に、0≦X2−X1≦βとなり、一時停止したNo.2柱を支える油圧ジャッキ1のロッド2の下降を再開したときの状態を示した。
【0025】
ただし、ある下降工程で、図1(c)、(d)に示した、解体施工を行う構造物Wの柱を支持する油圧ジャッキ1のうち、どのロッド2の下降速度が最も早いのか、どのロッド2の下降速度が最も遅いのかということは、No.1、No.2、No.3・・・の油圧ジャッキ1の相対ストローク値を所定の検出周期で検出し、油圧ジャッキ制御手段10で相互比較することで決定できる(図2参照)。
【0026】
以上のような本発明法によれば、切断工程では下端部を切断除去する柱の高さレベルに誤差が生じることを前提とし、下降工程で、下降を開始した全ての油圧ジャッキ同士の下降量の偏差を許容値以内に収めることができる。したがって、構造物の解体作業が安全にかつ効率的に行える。
ここで、図3に示した本発明法の好適なフローにおいて、ステップ100で行う好適な処理(a)、(b)、(c)は次のとおりである。
【0027】
(a):下降工程で、切断除去された柱の下端レベルまでロッド2を上昇させた状態を基準(ゼロ点)とする、各油圧ジャッキの相対ストローク値を検出し、検出した相対ストローク値の表示処理を行うこと。(b):下降工程で、ストロークエンドを基準(ゼロ点)とする、絶対ストローク値を検出し、検出した絶対ストローク値の表示処理を行うこと。(c):検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うこと。ただし、余裕量は、油圧ジャッキ制御手段10に構造物の解体作業を行う前に予め設定しておく。
【0028】
このような処理を行うようにすれば、油圧ジャッキ制御手段10によって行われているストローク制御の目視、警報による確認、非常停止などができ、切断・下降させる工法による構造物の解体施工作業がより安全かつ効率的に行うことができる。また、切断工程において、絶対ストローク値の表示処理を行うこと、絶対ストローク値に基づき、警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことがより好ましい。
【0029】
また、下降工程で、柱を支持する油圧ジャッキに作用する支持荷重を検出するのに、図2に示したように、油圧ジャッキ1のロッド側シリンダ室の圧力を検出するロッド側の圧力センサ4を設けるともに、油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサ5を、パイロットチェックバルブ6よりもヘッド側シリンダ室に近い圧油通路に連通して設ける必要がある。
【0030】
このように圧力センサ4、5を設けることによって、別な油圧ジャッキを設置し、あるいは柱とそれを支持する油圧ジャッキ1間にロードセルを設置せずに、式(1)に基づき、下降工程で、支持荷重P1を検出することができる。
支持荷重P1=P2−P3 ・・・・・・・・(1)
ただし、P2:ヘッド側の油圧による揚力、P3:ロッド側の油圧による下降力。
【実施例】
【0031】
1200トンもの質量を支えることができる油圧ジャッキを44台使用し、切断・下降させる工法により、1号棟、2号棟からなる高層ビルの解体施工を行った。本発明法を適用することで、相対ストローク値に基づき下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値α以内とする油圧ジャッキのストローク制御を行うことができ、その結果、1号棟、2号棟からなる高層ビルの解体作業を安全かつ効率的に行うことができた。許容値αは、高層ビルに応じて設定した。
【図面の簡単な説明】
【0032】
【図1】切断・下降させる工法の工程図である。
【図2】本発明法に用いて好適な油圧ジャッキの構成を示す一部断面を含む構成図である。
【図3】本発明法の好適な処理フロー図である。
【図4】本発明法を示す部分正面図である。
【符号の説明】
【0033】
W 構造物
H1、H2 No.1、No.2柱の下端レベル
A1 絶対ストローク値
X1、X2 相対ストローク値
P1 支持荷重
P2 ヘッド側の油圧による揚力
P3 ロッド側の油圧による下降力
1 油圧ジャッキ
2 ロッド
3 ストローク検出器
4、5 圧力センサ
6 パイロットチェックバルブ
7 ストップバルブ
8 バルブスタンド(流量調整弁を内蔵)
9 油圧ポンプユニット
10 油圧ジャッキ制御手段
11、12 配管
【特許請求の範囲】
【請求項1】
構造物の柱の下端にセットされた油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際の構造物の解体施工向け油圧ジャッキのストローク制御方法であって、
ジャッキセット工程で、ロッドの状況把握に用いる、ストロークエンドを基準とする絶対ストローク値検出のためのゼロ点の設定を行うとともに、
前記ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、
一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、
検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うことを特徴とする構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項2】
前記下降工程で、検出した相対ストローク値の表示処理を行うことを特徴とする請求項1に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項3】
前記下降工程で、検出した絶対ストローク値の表示処理を行うことを特徴とする請求項1に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項4】
前記下降工程で、検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことを特徴とする請求項3に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項5】
前記下降工程で、前記油圧ジャッキに柱から作用する支持荷重を検出するのに、前記油圧ジャッキのロッド側シリンダ室の圧力を検出するロッド側の圧力センサを設けるともに、前記油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサを、パイロットチェックバルブよりもヘッド側シリンダ室に近い圧油通路に連通して設けることを特徴とする請求項1から4のいずれか1項に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項1】
構造物の柱の下端にセットされた油圧ジャッキを用い、切断・下降させる工法により、構造物の解体施工を行う際の構造物の解体施工向け油圧ジャッキのストローク制御方法であって、
ジャッキセット工程で、ロッドの状況把握に用いる、ストロークエンドを基準とする絶対ストローク値検出のためのゼロ点の設定を行うとともに、
前記ジャッキセット工程の後の切断工程に続く、下降工程ごとに、切断除去された柱の下端レベルまでロッドを上昇させた状態で各油圧ジャッキの相対ストローク値検出のためのゼロ点の設定を行う初期設定工程と、
一斉に油圧ジャッキのロッドを下降させる下降工程を開始した以降、当該下降工程が終了するまでの間、前記ゼロ点の設定に基づき、各油圧ジャッキの絶対ストローク値および相対ストローク値を、所定の検出周期で検出するストローク検出工程と、を有し、
検出した相対ストローク値に基づき、当該下降工程で下降速度が最も早い油圧ジャッキの下降量と下降速度が最も遅い油圧ジャッキの下降量との偏差を許容値以内とする油圧ジャッキのストローク制御を行うことを特徴とする構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項2】
前記下降工程で、検出した相対ストローク値の表示処理を行うことを特徴とする請求項1に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項3】
前記下降工程で、検出した絶対ストローク値の表示処理を行うことを特徴とする請求項1に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項4】
前記下降工程で、検出した絶対ストローク値に基づき、ストロークエンドから余裕量だけ残して警報の発生処理及び/又は全ての油圧ジャッキの非常停止処理を行うことを特徴とする請求項3に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【請求項5】
前記下降工程で、前記油圧ジャッキに柱から作用する支持荷重を検出するのに、前記油圧ジャッキのロッド側シリンダ室の圧力を検出するロッド側の圧力センサを設けるともに、前記油圧ジャッキのヘッド側シリンダ室の圧力を検出するヘッド側の圧力センサを、パイロットチェックバルブよりもヘッド側シリンダ室に近い圧油通路に連通して設けることを特徴とする請求項1から4のいずれか1項に記載の構造物の解体施工向け油圧ジャッキのストローク制御方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−89886(P2010−89886A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−260380(P2008−260380)
【出願日】平成20年10月7日(2008.10.7)
【出願人】(591205536)JFEシビル株式会社 (39)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月7日(2008.10.7)
【出願人】(591205536)JFEシビル株式会社 (39)
【Fターム(参考)】
[ Back to top ]