
構造物内空変位計測方法及びその装置
【課題】トンネルをはじめとした構造物の内空変位を計測し、該構造物の変状を監視する技術を提供すること。とくに工事中のトンネルや地下鉱山のトンネルのように粉塵が浮遊している空間に対しても、広範囲にわたって内空変位を計測しモニタリングできる方法を提供すること。
【解決手段】計測対象となる構造物の内側に内空変位センサである梁の一端を固定し、当該梁の表面にひずみ計測が可能な装置を設置し、当該装置により計測されたひずみから、当該構造物の鉛直方向および水平方向の変位を算出する構造物内空変位計測方法
【解決手段】計測対象となる構造物の内側に内空変位センサである梁の一端を固定し、当該梁の表面にひずみ計測が可能な装置を設置し、当該装置により計測されたひずみから、当該構造物の鉛直方向および水平方向の変位を算出する構造物内空変位計測方法
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トンネルなどの構造物の内部にひずみを計測するセンサを設置し、構造物の天井と側面の二方向の内空変位を同時に計測する方法及びその装置の提供に関するものである。
【背景技術】
【0002】
トンネル等の内部空間は、建設工事中の掘削や、時間経過に起因する周辺地盤応力分布の不均衡によって変形や損傷を受けたり、それらが進行することによって崩壊にいたる場合がある。そのため、内部空間を健全な状態に維持管理し、建設作業の安全性や効率を向上するとともに建設後も内部空間を安全に利用し続けるためには、常にその状態をモニタリングし、その変状を検出することが重要である。
【0003】
モニタリングされる物理量は地下空間内部や周囲の岩盤に生じた変形や変位、ひずみ、応力、振動、温度など様々であり、ひずみや応力の計測には抵抗線ひずみゲージや振動ワイヤ応力計などが、変位や変形の計測には様々な計測原理に基づく伸縮計が用いられている。
【0004】
最近では、光ファイバを用いた各種のセンシングシステムの応用についても研究、開発が進められている。それらの例を以下に示す。光ファイバの曲げ曲率の変化にともなって光の伝搬損失が変化することを利用したシステムが考案されている。(特許文献2)このシステムでは、計測対象部分に屈曲した光ファイバを設置し、計測対象部分の変位によって生じた屈曲部の光損失をOTDRで計測することによって変位を求めるものである。
【0005】
光ファイバのひずみを分布として計測できるひずみ分布測定器(例えばBOTDR:Brillouin Optical Time Domain Reflectometer)を利用したシステムも開発されている。例えば、トンネル内壁面のひび割れをまたぐように光ファイバを設置し、BOTDRを用いて予め実験的に求めておいた光ファイバのひずみの計測値とひび割れ幅の関係に基づいて、ひび割れ幅を求めるシステムが提案されている。(特許文献1)
【0006】
また、地下鉱山トンネルの天井にロックボルトを打ち込み、該各ロックボルトを1本の光ファイバセンサで結び、該センサの伸縮によりトンネルの変状を検知するシステムがある。(非特許文献1)光ファイバ1本の伸縮が計測されているだけなので、このシステムでは変位を定量的に得ることができない。
壁面と直交する方向の変位、すなわち内空変位を定量的に計測するためのシステムの開発も進められている。(特許文献3)このシステムではトンネル内空に十字に光ファイバセンサが設置され、それぞれについて計測されたひずみとトンネル直径の積として、水平、鉛直方向の直径変化が求められている。
【0007】
一方、特許文献3には、上記従来技術の解決策として半円型内空変位センサが示されている。半円型内空変位センサは半円形に加工したパイプの両側面に光ファイバを固着したものであり、特許文献3の図8に示されるように、円環内部に取り付けることで内部空間を確保しつつ内空変位を計測する。はじめに、センサ上下端に荷重が作用した際に生じる2本の光ファイバのひずみ計測値から水平方向の内空変位を算出する。そして、その算出した水平方向の内空変位と実際に与えた鉛直方向の内空変位との関係を実験的に求めることで、水平方向の内空変位から鉛直方向の内空変位を算出している。
【0008】
また、光ファイバ内にブラッググレーティングを形成し、そこからの反射光の周波数がひずみや温度に依存してシフトする性質を利用したファイバブラッググレーティング(FBG)に基づくシステムもある。(非特許文献2)このシステムではトンネルの1つの断面について、内部空間が確保できるようにその内壁にそって5つのFBGを設置し、FBGを固定している両端の長さ変化として変形を観測している。
【0009】
【特許文献1】特開2001−66117号公報
【特許文献2】特開2001−201411号公報
【特許文献3】特開2008−180672号公報
【非特許文献1】“分布型光ファイバひずみセンシングシステムの地下鉱山変状モニタリングへの適用”,成瀬央,上原秀幹,出口大志,藤橋一彦,大西正敏,R. Espinoza, C. Guzman, C. Pardo, C. Ortega, M. Pinto, 信学技報,社団法人電子情報通信学会,OFT2006-66(2007-1), 71-76 (2007).
【非特許文献2】“高感度FBGによる構造物変形監視システム”,小中隆義,小川浩和,櫻田龍三,高田京平,佐々木一正,信学技報,社団法人電子情報通信学会,OFT2002-36(2002-08), 19-23 (2002).
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記のように、内部空間の様々なモニタリング方法がこれまで提案されているが、各技術にはそれぞれ課題がある。
【0011】
特許文献1の方法は、壁面表面上のひび割れ幅あるいは変位の検出には有効ではあるが、壁面と直交する方向の変位、すなわちトンネル内空変位を求めることは困難である。
特許文献2の方法は、光ファイバの屈曲に変換できる物理量を計測できる利点はあるものの、計測対象数が増える、屈曲が大きくなるにつれて光ファイバの光損失が大きくなるため、計測点数が制限される問題点がある。
特許文献3の方法は、円環構造物の内部空間に利用制限が加わるため、トンネルなどへの適用が困難である。また、特許文献3の図8に示されるような方法は、計測対象へのセンサ設置前に予め水平方向と鉛直方向の内空変位との間の関係を実験的に求める必要があり、設計段階において算出変位の見積もりやシミュレーションができない。また、一箇所のセンサ設置毎に、当該試験をおこなう必要があり、手間や時間がかかる。
【0012】
非特許文献1における方法では、天井の鉛直方向と水平方向の合成変位だけが求められ、水平方向に比べ鉛直方向変位の感度が低く、合成変位の方向によっては変状を検知できないという問題がある。
非特許文献2における方法では、必ずしも内空変位を定量的に計測できていないことや、トンネル内空の利用範囲が制限されるという問題点がある。また、得られるFBGのひずみスペクトルから内空変位を求めようとする場合、設置されたFBGセンサの固定2点間距離の変位しか求めることができず、トンネル内空の垂直方向および水平方向の変位を直接求めることはできない。
【0013】
本発明は、上述した課題を解決するために創案されたものであり、計測対象へのセンサ設置前に水平方向と鉛直方向の内空変位との間の関係を実験的に求める必要がなく、簡便かつ正確に内空変位を計測することができる内空変位計測方法及びその装置を提供することを目的としている。
【課題を解決するための手段】
【0014】
上記課題を解決するため、本発明の内空変位計測システムは、
<1>トンネル状構造物の内空変位を計測する内空変位計測システムであって、前記トンネル状構造物の内壁面に沿って設置され内空と一体に変位する梁手段と、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスと、前記ひずみ検出用デバイスの出力情報を入力として前記トンネル状構造物の鉛直方向および水平方向の変位を計算するコンピュータプログラムと、からなることを特徴とする。
<2>前記<1>の内空変位計測システムは、前記梁手段が、梁部材と、前記梁部材を前記トンネル状構造物の内壁面に固定する1つ以上の固定機構と、前記トンネル状構造物の内空変位を前記梁部材に伝達する1つ以上の内空変位伝達機構と、を具備することを特徴とする。
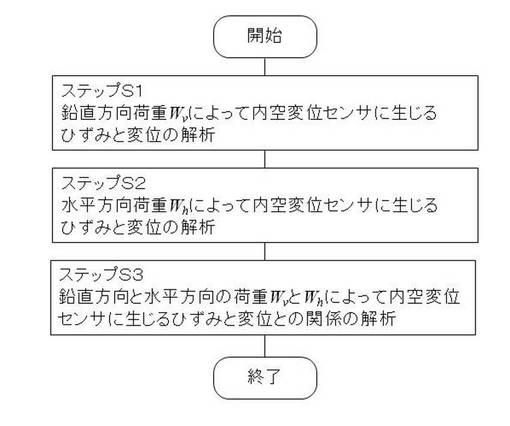
<3>前記<1>若しくは<2>の何れか1項に記載の内空変位計測システムは、前記コンピュータプログラムが少なくとも次の3ステップを含み鉛直方向および水平方向の変位を計算することを特徴とする。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
<4>前記<3>の内空変位量計算プログラムは、内空変位計測システムのひずみ検出用デバイスからの出力情報を入力とし、少なくとも次のステップを含み内空変位量を計算することを特徴とする。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhにひずみ検出用デバイスに生じるひずみと変位との関係の解析
【0015】
また、本発明の内空変位計測方法は、トンネル状構造物の内空変位を計測する内空変位計測方法であって、前記トンネル状構造物の内空と一体に変位する梁手段を内壁面に沿って設置し、前記梁手段上に、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスを設置し、前記ひずみ検出用デバイスの出力情報を入力として、前記トンネル状構造物の鉛直方向および水平方向の変位を計算して求め、内空変位量とすることを特徴とする。
【発明の効果】
【0016】
本発明によれば、トンネル等の構造物における垂直方向と水平方向の二方向の内空変位を、一つのセンサを用いて同時にモニタリングすることができる。
【図面の簡単な説明】
【0017】
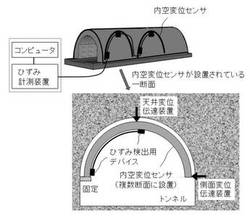
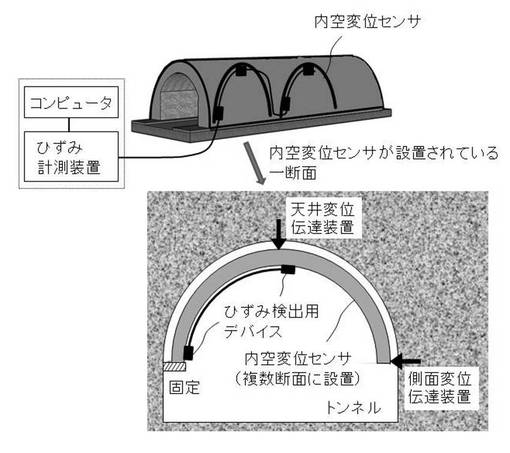
【図1】本発明の構造物内空変位計測装置の構造物への設置構成の一例を示す概略図である。
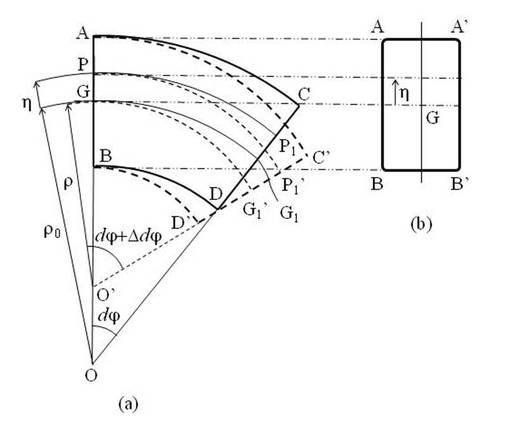
【図2】曲り梁の変形前と変形後における任意の微小区間の側面図及び断面図を示す。
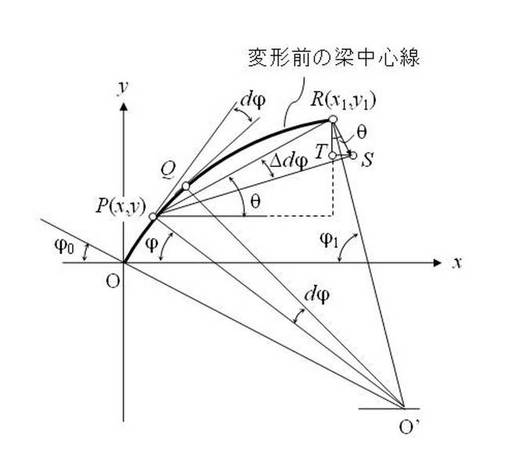
【図3】曲り梁のたわみ解析に用いるための梁中心線の模式図である。
【図4】本発明の構造物内空変位計測方法における、ひずみから変位を算出する解析工程を示すフローチャート図である。
【図5】本発明の構造物内空変位計測方法の主要工程を示すフローチャート図である。
【図6】曲り梁の変形前後の状態を表した図である。
【図7】鉛直方向荷重Wvによって内空変位センサに生じるひずみと変位の関係を解析するための模式図である。
【図8】水平方向荷重Whによって内空変位センサに生じるひずみと変位の関係を解析するための模式図である。
【図9】本発明の構造物内空変位計測方法を用いた実験装置の一例を示す図である。
【図10】本発明の構造物内空変位計測方法において、内空変位センサと計測対象となる構造物壁面内側との間に設置する、変位伝達機構の一例を示す図である。
【図11】本発明の構造物内空変位計測方法において、ひずみ検出用デバイスとして、ひずみゲージを用いたときの変位計測結果を示す図である。
【図12】本発明の構造物内空変位計測方法において、ひずみ検出用デバイスとして、ファイバブラッググレーティングを用いたときの変位計測結果を示す図である。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照して本発明の一実施形態について説明する。図面は模式的なものであり、現実のものとは異なる。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれている。
本発明における計測装置は図1に示すように、トンネルの内側に設置された内空変位センサ、天井変位と側面変位を内空変位センサに与える変位伝達装置、ひずみ検出用デバイスの信号からひずみを得るひずみ計測装置、計測されたひずみから変位を算出するとともに装置全体を制御するためのコンピュータから構成されている。内空変位センサは、天井変位と側面変位を伝達し、それらの変位に応じたひずみを発生させる曲り梁と、その曲り梁に生じたひずみを検出するために曲り梁に設置したひずみ検出用デバイスの2つからなっている。以下、本特許明細書では、変位やひずみの解析に着目している、すなわち梁単独としての場合には曲り梁と呼び、曲り梁とひずみ検出用デバイスが一体となって機能する場合には内空変位センサと呼ぶこととする。この内空変位センサはその一端がトンネル壁面に固定されている。この内空変位センサを複数設置することによって、多断面の変位計測が行える。
【0019】
実施例を説明する前に、非特許文献3を引用しながら、曲り梁に生じるひずみと変位との関係を与える一般的な力学的解析について説明する。この解析は本内空変位計測における基本となっている。
【非特許文献3】“材料力学上巻”,鵜戸口英善,川田雄一,倉西正嗣, 裳華房, (2006 第44刷).
【0020】
まず,曲り梁に生じるひずみを求める。曲り梁の任意の微小部分を図2に示す。図2(a)のABDCは荷重が作用する前の横断面、ABD'C'は荷重が作用した後の横断面である。この曲り梁の横断面は、荷重を受ける前も荷重を受けてさらに曲った後も平面で、かつ中心線に平行な縦繊維に直交し、梁の中心線に平行な縦繊維は互いに力を及ぼし合わない、また、応力は梁の材料の比例限度を超えることなく、縦弾性係数は引張と圧縮に対し等しいとする.図2(b)
は梁の断面形状の一例を示したものであり、荷重が作用してもこの形状は変わらないものとする。
荷重の作用前後において中心線の長さはGG1からGG1'に、中心線の曲率半径はOG1=ρ0からOG1'=ρに、荷重前後の二つの平面のなす角はdφからdφ+Δdφに変わるから、中心線のひずみε0は以下のように与えられる。(なお、フォント変換の関係上、本明細書の本文におけるφは、数式および図面中では

と表わす。)
【数1】
数式1および数式2では、⌒は円弧の長さを示すものとする。また、中心線から距離ηだけ離れた繊維PP1のひずみεは、ηが変形の前後において変わらないものとすると、
【数2】
となるので、数式2に数式1を代入して
【数3】
が得られる。ここでηは曲率中心から離れる方向を正とする。角度dφの変化の割合をωとして
【数4】
とおくと、数式3は以下のように書ける。
【数5】
したがって、この梁の材料の縦弾性係数をEとすると、梁の縦繊維と垂直方向には応力が作用していないとしているので、PP1に作用する応力σは、
【数6】
となる。数式6より、ε0とωが求められれば応力σを計算できることがわかる。
これらのε0とωは、力とモーメントについての平衡条件から以下のように求められる。曲り梁には曲げモーメントMと軸力Nが作用しているとすると、各断面における応力の総和が軸力Nに等しいことから次式が成り立つ。
【数7】
ここで、軸力Nの符号として、引張りには正、圧縮には負を与える。一方、曲げモーメントMの平衡から次の関係式が成り立つ。
【数8】
ここで、曲げモーメントMは曲率半径が小さくなるように働く方向を正とする。ところで
【数9】
であり、梁の主軸に対する断面一次モーメントは0であるから
【数10】
である。数式7と数式8はそれぞれ
【数11】
【数12】
と書くことができる。今、
【数13】
とおき、数式9を考慮すれば
【数14】
が得られる。数式14において、κは曲り梁の断面係数であり、梁の断面形状、寸法、変形前の曲り梁中心線の曲率半径が与えられると定まる正の数である。これらの関係を力とモーメントの平衡式である数式11と数式12に代入すると
【数15】
【数16】
が得られる。数式16を数式15に代入することによってε0は
【数17】
と、また、数式16に数式17を代入することによってωは
【数18】
と求められる。したがって、曲り梁に働く応力σとひずみεは、それぞれ数式19、数式20として求められる。
【数19】
【数20】
【0021】
次に曲り梁のたわみ、すなわち変位について解析する。曲り梁の中心線の模式図を図3に示す。弧ORは、曲り梁の任意の区間の中心線を表す。この曲り梁は原点Oで固定されており、原点Oを直交座標xyの交点にとる。この曲り梁に荷重が作用して中心線上の任意点P(x,y)における長さPQ=dsの微小中心線がたわんだために、点Qの点Pに対する傾き角dφがΔdφ変化し点Rが点Sに変位したとすると、このΔdφによる点R(x1,y1)のx、y軸方向の微小変位dδx、dδyは、Δdφが微小であるとするとそれぞれ次のようになる。
【数21】
【数22】
ここで点Tは、点Rを通りy軸に平行な直線と、点Sを通りx軸に平行な直線との交点である。また数式21および数式22では、 ̄は2点間の距離を示すものとする。なお、変形後の梁中心線は点Pと点Qを結ぶ曲線となるが、図の見やすさを考え、図3には示していない。また、数式21、数式22では数式4のω=Δdφ/dφの関係を用いている。数式18より、
【数23】
であるので、このωを数式21と数式22に代入するとdδx、dδyはそれぞれ
【数24】
【数25】
となる。したがって、曲り梁に荷重が作用してOR間がたわんだために点Rに生じた変位のx成分δxとy成分δy、および点Rの傾き角の変化iはそれぞれ次のように、dδx、dδy、ωをφ0からφ1まで積分することによって求めることができる。
【数26】
【数27】
【数28】
【0022】
以上は中心線の傾斜の変化ωによる変位であるが、これに中心線自身のひずみε0による変位を加える必要がある。
PQ=ds間の中心線のひずみによる点R(x1,y1)の変位のx成分をdδ’x、y成分をdδ’yとすると
【数29】
【数30】
であり、数式17からε0は
【数31】
であるから、点Oから点Rまでの中心線のひずみによるR点の変位のx成分δ’xとy成分のδ’yはそれぞれ次のように求められる。
【数32】
【数33】
したがって、中心線の伸縮をも考慮に入れた場合のR(x1,y1)点の変位のx成分とy成分δx+δ’x、δy+δ’yはそれぞれ次式で与えられる。
【数34】
【数35】
中心線のひずみε0は傾き角に対しては影響を与えないので、中心線の伸縮を考慮に入れた場合にもR点の傾き角の変化は数式28のままでよい。上述の解析結果、ひずみと変位の関係に関する基礎方程式として数式20、数式34、数式35が得られた。
【0023】
図4は、本発明の一実施形態にかかる内空変位計測方法における解析工程を示すフローチャート図である。本発明における計測方法では、図4に示したように、鉛直方向と水平方向の変位すなわち天井と側面の変位が与えられたときに曲り梁に生じるひずみから、鉛直方向と水平方向の変位を算出する解析工程であるステップS1からステップS3に基づいて、それらの変位を算出する。以下では、図4に示したフローチャートを用いて、まず、曲り梁のひずみと変位の解析工程であるステップS1からステップS3について説明する。
【0024】
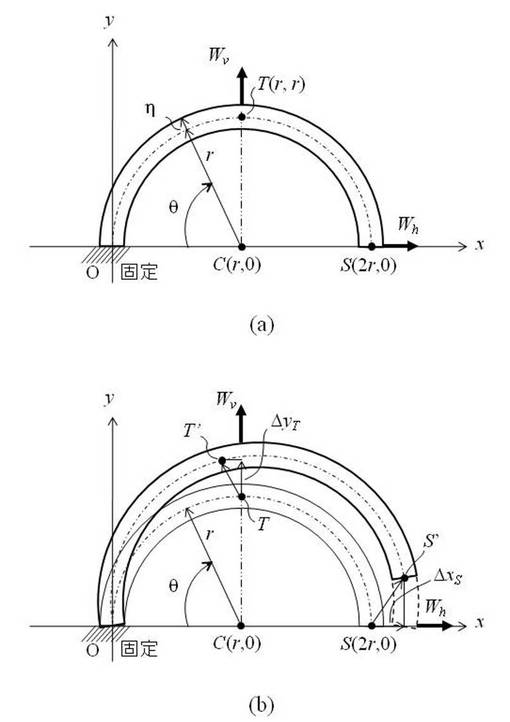
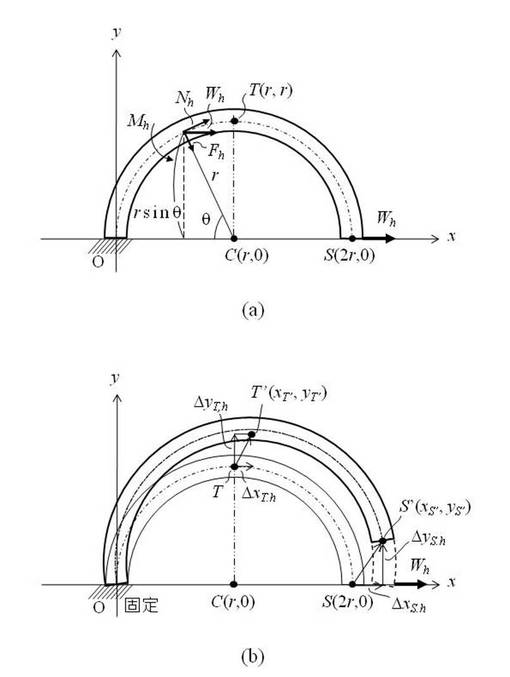
内空変位センサに用いられている曲り梁の変形前後の状態を、それぞれ図6(a)、(b)に示す.図の曲り梁の左端はトンネル側面に固定された固定端であり、一点鎖線で示されている梁の中心線の半径はrである。また、梁中心線からひずみ検出用デバイスが取り付けられている梁表面までの距離はhである。固定端における梁中心線の位置を原点Oとし、原点Oと梁中心線の曲率中心Cとを結ぶ軸をx軸、x軸と直交し原点Oを通る軸をy軸とする.また、点Cを中心にx軸負方向から右回りに角度θをとる。トンネルの天井や側面の変位を計測することを考え、x軸、y軸をそれぞれ水平、鉛直方向にとることにし、天井と側面に対応する、すなわち角度θがπ/2、πである梁の中心線位置を、それぞれ点T(r, r)、S(2r,0)とする。また、天井、側面が変位し、それにともなって点T、点Sにそれぞれ荷重Wv、Whが作用し点T’、点S’に変位したとする。実際には、これらの変位や荷重は梁表面に与えられるが梁の断面形状は変わらず、荷重は対応する梁中心線位置に作用しており、梁表面での変位と中心線位置での変位は同じであるとする。本内空変位計測では、天井変位としてTT’の鉛直方向成分ΔyT 、側面変位としてSS’の水平方向成分ΔxSを同時に求める。半径rに対し変位は微小であるので、ΔyTは点Tの鉛直方向変位、また、ΔxSは点Sの水平方向成分とみなすこともできる。これらの解析にあたって、引張ひずみと引張応力には正の符号、圧縮ひずみと圧縮応力には負の符号を与える.またx、y軸正方向の荷重と変位には正の符号、x、y軸負方向の荷重と変位には負の符号を与える。以下では、鉛直、水平方向に荷重Wv、Whが独立して作用する状態を別々に解析し、重ね合わせの原理に基づいて両荷重が同時に作用した場合の結果を求めていく。
【0025】
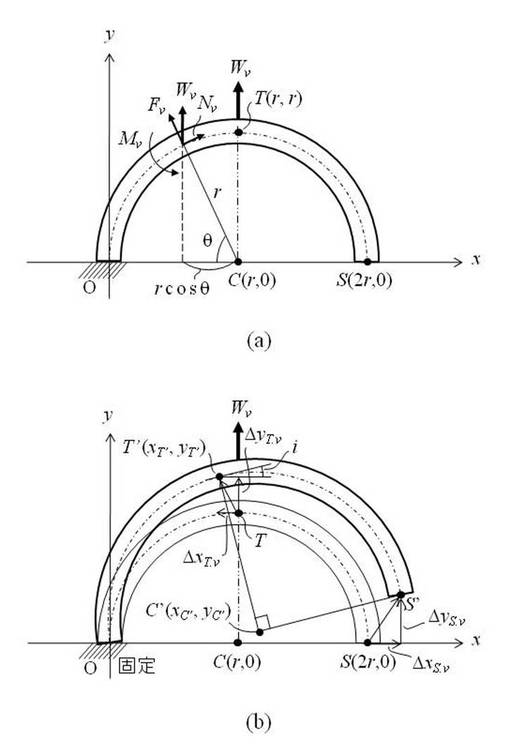
ステップS1は、鉛直方向荷重Wvによって内空変位センサに生じるひずみと変位を解析するステップである。そのときの解析モデルを図7に示す。図7(a)は、天井の変位が与えられる点Tに鉛直方向荷重Wvが作用し、その結果として角度θの断面において接線方向に軸力Nv、半径方向にせん断力Fv、曲げモーメントMvが発生している様子を示している。図7(a)より明らかなように、
【数36】
【数37】
である.ここで、数式36と数式37を数式17に代入すると、この荷重条件では
【数38】
となる。これは、中心線におけるひずみが0であることを示している。したがって、Wvのみ作用する場合の角度θにおける曲り梁のひずみεv(θ)は、数式38を考慮して数式20に数式37を代入することによって次のように求められる。
【数39】
数式39は、鉛直方向荷重Wvが単独で作用する場合にはひずみは0≦θ<π/2の範囲のみで生じ、π/2≦θ<πの範囲ではひずみが生じないため曲り梁は変形することなくもとのままの形状を保つことを示している。
【0026】
つぎに数式34、数式35に基づいて、図7(b)に示す鉛直方向荷重Wvだけが作用している場合の、天井の鉛直方向変位ΔyT,vと水平方向変位ΔxT,v変位について解析する。実際の計測では曲り梁中心線半径に比べ変位は微小なので、変位によって生じる曲り梁の変形にともなう、梁に対する荷重点の相対位置の変化は無視できるものとする。この場合、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π/2、r、rであり、
【数40】
であるので、数式38を考慮することによって、数式34、数式35よりΔxT,vとΔyT,vはそれぞれ以下のように得られる。
【数41】
【数42】
また、傾き角の変化iは数式28より上と同様にして以下のように求められる。
【数43】
ここでさらに、側面の鉛直、水平方向変位ΔyS,v、ΔxS,vを求める。点Tに鉛直方向荷重Wvが作用している状態では前述したように、梁のTS部にはひずみは生じないため、TS部はもとの形状を保ったまま点Sは点S’に変位する。すなわち、点S’(xS’,yS’)は点C’(xC’,yC’)を中心に、点T’(xT’,yT’)をπ/2回転した位置となる。したがって、これらの関係は次式で与えられる。
【数44】
また、点T(xT’,yT’)、点C’(xC’,yC’)、変位ΔxT,vとΔyT,vについての幾何学的関係から、
【数45】
【数46】
【数47】
【数48】
が成り立つ。数式45から数式48を数式44に代入すると、
【数49】
が得られる。さらに、求めるべき側面の鉛直、水平方向変位ΔyS,v、ΔxS,vと点S’(xS’,yS’)の関係は
【数50】
【数51】
で与えられるので、数式49、数式50、数式51より
【数52】
【数53】
が得られる。傾き角の変化iは微小として
【数54】
とすると数式52、数式53は次のように近似される。
【数55】
数式41、数式42、数式43を数式55に代入すると、変位ΔyS,v、ΔxS,vはそれぞれ以下のように求められる。
【数56】
【数57】
【0027】
ステップS2は、水平方向荷重Whによって内空変位センサに生じるひずみと変位との関係を解析するステップである。そのときの解析モデルを図8に示す。図8(a)は、側面の変位が与えられる点Sに水平方向荷重Whが作用し、その結果として角度θの断面において接線方向に軸力Nh、半径方向にせん断力Fh、曲げモーメントMhが発生している様子を示している。図8(a)より明らかなように、
【数58】
【数59】
である。ここで、数式58と数式59より、この荷重条件では
【数60】
である。なおステップS1の場合と同様、これは中心線におけるひずみが0であることを示している。したがって、Whのみ作用する場合の角度θにおける曲り梁のひずみεh(θ)は,数式60を考慮して数式20に数式59を代入することによって次のように求められる。
【数61】
数式61は、水平方向荷重Whが単独で作用する場合、0<θ<πの範囲でひずみが生じ、曲り梁は全体が変形することを示している。
ステップS1と同様にはじめに、数式34、数式35に基づいて水平方向荷重Whだけが作用している場合における天井の鉛直方向変位ΔyT,hと水平方向変位ΔxT,h変位について解析する。この場合においても、曲り梁中心線半径に比べ変位は微小で、曲り梁の変形にともなう荷重点の梁に対する相対位置の変化は無視できるものとする。また、曲り梁は変位計測範囲を考慮し、図6、図8に示されているように半円より大きな円弧をもつものであってもよい。本荷重条件でも図8(b)に示すように、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π/2、r、rであり、
【数62】
であるので、数式60を考慮することによって、数式34、数式35よりΔxT,vとΔyT,vはそれぞれ以下のように得られる。
【数63】
【数64】
【0028】
次に、水平方向荷重Whだけが作用している場合における側面の水平方向変位ΔxS,hと鉛直方向変位ΔyS,hについて解析する。この場合、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π、2r、0であり、
【数65】
であるので、数式34、数式35より
【数66】
【数67】
である。
ステップS3は、重ね合わせの原理に基づいて水平方向と鉛直方向の荷重WhとWvによって曲り梁に生じるひずみと変位との関係の解析するステップである。水平方向荷重Whと鉛直方向荷重Wvとが同時に作用した場合に生じるひずみε(θ)は、重ね合わせの原理より、水平、鉛直方向荷重が単独で作用したときのひずみεh(θ)、εv(θ)の和として得られる。したがって、ε(θ)は、
【数68】
と求められる。一方、水平方向荷重Whと鉛直方向荷重Wvとが同時に作用した場合の天井変位、すなわち点Tの鉛直方向変位ΔyTは、WhとWvによって生じる変位ΔyT,vとΔyT,hの和として求められるので、数式42、数式64より
【数69】
であり、側面変位、すなわち点Sの水平方向変位ΔxSは、WhとWvによって生じる変位ΔxS,vとΔxS,hの和として求められるので、数式56、数式66よりΔxSは、
【数70】
となる。数式68、数式69、数式70より、角度θ1(0≦θ1<π/2)とθ2(π/2≦θ2<π)でひずみε1とε2が観測されたとすると、これらのひずみと、天井と側面の変位ΔyTとΔxSとの関係は次のように求められる。
【数71】
【数72】
したがって、数式71と数式72から、内空変位センサ各部の寸法、すなわち用いられている曲り梁の中心線半径r、梁中心線からひずみ検出用デバイスが取り付けられている梁表面までの距離η、2つのひずみ検出用デバイスが取り付けられている角度θ1とθ2を求めておくことによって、それらのデバイスで検出されたひずみε1とε2から天井と側面の変位ΔyT、ΔxSを算出できる.
【0029】
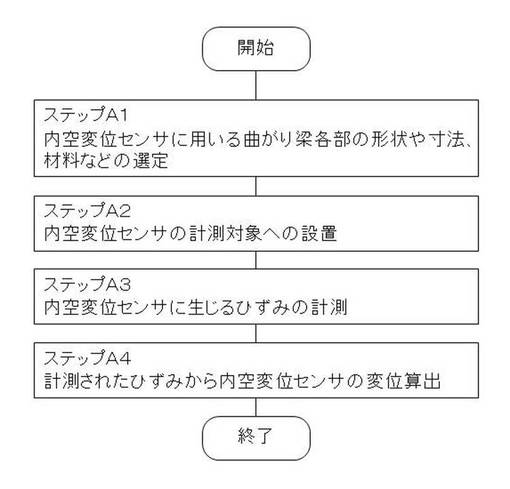
次に、内空変位センサを設置し、実際に変位を計測する変位モニタリング工程について図5を用いて説明する。図5は、本発明の一実施形態にかかる内空変位計測方法を示すフローチャート図である。内空変位センサ表面において計測されたひずみから変位を計測する工程である、ステップA1からステップA4に基づき計測する。ステップA1は、内空変位センサに用いる曲り梁各部の形状や寸法、材料などを選定する工程である。モニタリングするトンネルの大きさに基づいて、曲り梁の中心線半径を決定する。また、計測する最大変位、そのときのひずみなどを考慮して梁の断面形状や材質を決める。ステップA2は、内空変位センサを計測対象に設置する工程である。例えば図1や図9(a)に示すように、曲り梁の一端を固定するとともに、天井と側面の変位を曲り梁に与える変位伝達装置を設置する。ステップA3は、内空変位センサである曲り梁に生じるひずみを、ひずみ検出用デバイスで計測する工程である。曲り梁外側表面に生じるひずみε1とε2を、曲り梁に取り付けられたひずみ検出用デバイスを用いて計測する。ステップA4は、計測されたひずみから天井と側面の変位を算出するステップである。なお、図4に示した解析工程は、図5のステップA4における変位算出ステップにおいて適用する。
【実施例】
【0030】
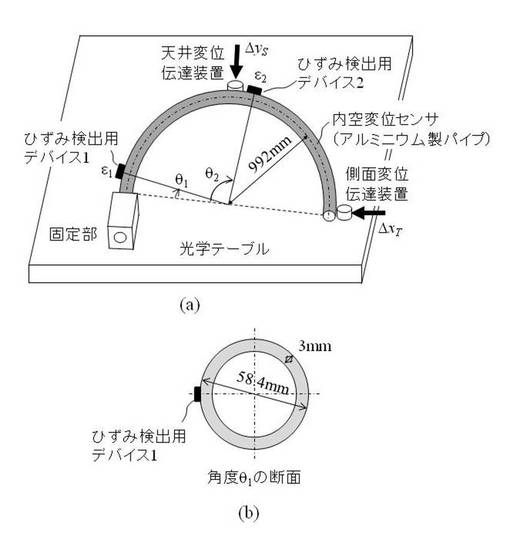
次に、本発明による内空変位計測方法を用いた実験結果について説明する。今回構築した実験装置の概要を図9(a)に、また、ひずみ検出用デバイスが取り付けられている角度θ1の箇所の断面を図9(b)に示す。この実験装置には曲り梁として、中心線半径rが992mm、内外径が52mm、58mmのアルミニウム製パイプが用いられている。今回の計測では、鉛直方向荷重と水平方向荷重をx軸、y軸の正から負方向に、すなわち天井と側面変位いずれも梁の外側から外側表面に与えるようにした。数式68は角度θが0からπ/2の範囲では、θが0に近い場合に鉛直方向荷重Wvがひずみε(θ)の支配的要因となるが、π/2からπの範囲ではθがπ/2に近づくにつれてひずみの大きさが大きくなることを示している。このことと、変位伝達装置とひずみ検出用デバイスとの干渉を考え、今回は角度θ1と角度θ2がπ/12と19π/36となる曲り梁(パイプ)の外側表面位置にひずみ検出用デバイスを取り付けた。本実施例では、当該デバイスとして、ひずみゲージとファイバブラッググレーティングのそれぞれを用いた場合について実験をおこない、本発明による計測方法の効果を確認した。
【0031】
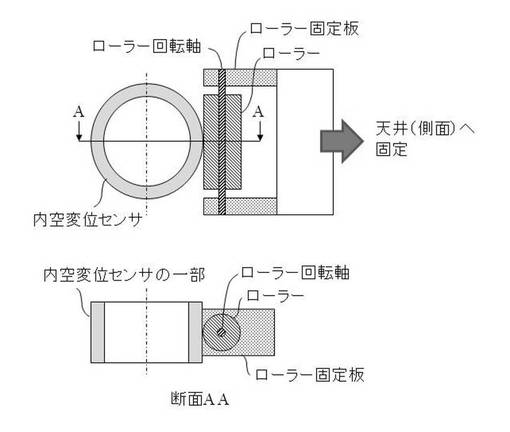
ステップA2により、図9(a)に示したように、曲り梁の一端を固定するとともに、天井と側面の変位を曲り梁に与える変位伝達装置を設置する。図10は変位伝達装置の一例であり、これを天井と側面に設置する。特許文献3ではパイプの両端の固定に回転支点が用いられているが、本発明では、点Tと点Sを回転支点としてこれらの点に変位を付与する場合には、曲り梁はOT間が一端固定端他端自由支持梁、TS間が回転端アーチの連続梁(不静定梁)となるため、図4のステップS1からステップS3の解析の前提を満たさない。そこで、この前提を満たすために移動支点としている。この移動支点の一例として、図10には、ローラーを用いた回転機構を通して点Tと点Sに天井と側面の変位を伝達する変位伝達装置が示されている。
【0032】
ステップA3により、内空変位センサである曲り梁に生じるひずみを、ひずみ検出用デバイスで計測する。前述したように今回のシステムでは、角度θ1=π/12とθ2=19π/36の曲り梁外側表面に生じるひずみε1とε2を、曲り梁に取り付けられたひずみ検出用デバイスを用いて計測する。本実施例では、当該デバイスとして、ひずみゲージとファイバブラッググレーティングのそれぞれを用いた場合について計測した。
【0033】
ステップA4により、計測されたひずみから天井と側面の変位を算出する。今回は天井と側面変位のいずれの方向についても、変位を0から、曲り梁中心線直径1984mmの約1%に相当する20mmまで、上述したように梁の外側から内側に向けて、すなわちx軸、y軸の負方向に変位を4mm間隔で与えた。そしてそのとき生じたひずみをひずみ検出用デバイスで計測し、それより天井と側面変位を算出した。
【0034】
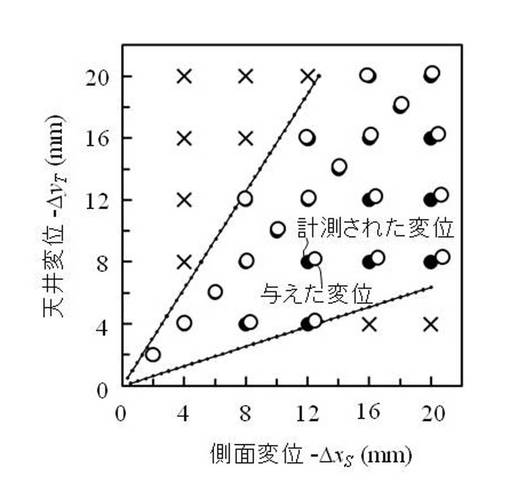
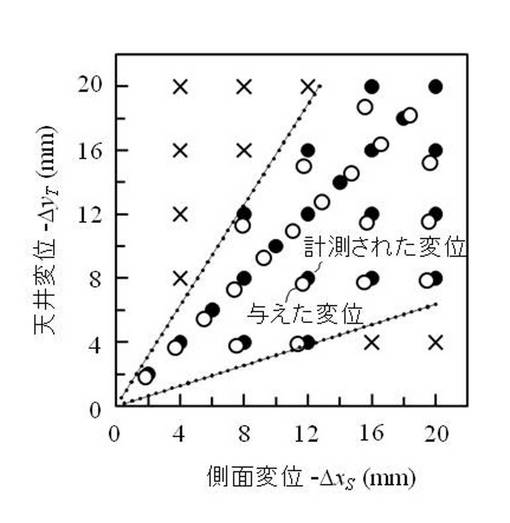
当該ひずみ検出用デバイスとして、ひずみゲージを用いたときの変位計測結果を図11に、ファイバブラッググレーティングを用いたときの変位計測結果を図12に示す。図11と図12のいずれにおいても横軸は側面変位、縦軸は天井変位であり、●は与えた変位、○は得られた変位である。これらは、力学的解析結果と内空変位センサの各部の寸法を用いただけの実験結果であり、従来のように、事前に校正曲線を得るための実験を行っていない。それにもかかわらず、誤差の大きかったファイバブラッググレーティングであっても、誤差は変位の10%程度であった。同じ内空変位センサを用いた場合でもひずみゲージでの誤差はより小さいので、前者の誤差は本方法に起因するものではなく、使用するひずみ検出用デバイスによるものでると考えている。本発明の有効性を確認するために今回構築した実験装置では、構築の容易さから、前述したように外側から内側にだけ変位を与える変位伝達機構を採用した。その結果、ステップS1からステップS3での解析から得られるように、内空変位センサは天井か側面の一方が内側に変位すると、もう一方も内側に変位しローラーが梁から離れるため、本荷重条件では一方の変位は計測できるが、両方の変位を計測できない場合が生じる。図11と図12の破線が求められた境界であり、両破線の外側は一方の変位しか計測できない領域である。実験結果はこの境界を明確に示しており、解析の妥当性が確認される。この解決のためには、ローラーを梁の反対側(今回の実験装置では内側)にも取り付ければよく、これによって、常に両方向の変位を得ることができる。変位計測結果は、ひずみ検出用デバイスによらず、側面と天井の変位を同時に計測できることを示している。
【産業上の利用可能性】
【0035】
本発明は、トンネルのモニタリングにとって重要な天井と側面の変位、すなわち二方向の変位を同時計測できる方法を提供するものであり、トンネル以外にも岩盤、山肌をはじめとする二方向変位同時計測が必要な構造物や空間の変形、挙動を監視するシステムに用いることができる。また本発明は、粉塵が浮遊していて光学的モニタリングが行いえない対象の変位モニタリングが行える利点がある。加えて、ひずみ検出用デバイスとして一般的に用いられているひずみゲージを用いても本発明を実施することもできるが、ファイバブラッググレーティングなどのように長距離多点計測が可能で防爆性が高いデバイスを用いることによって、電気設備がほとんどない地下炭鉱のような対象に対しても、火災を心配することなく広範囲にわたる内空変位計測が実現できる利点がある。さらに、変位計測する際に、事前に校正曲線を得るための試験作業をする必要がないことも実用的な利点である。
【技術分野】
【0001】
本発明は、トンネルなどの構造物の内部にひずみを計測するセンサを設置し、構造物の天井と側面の二方向の内空変位を同時に計測する方法及びその装置の提供に関するものである。
【背景技術】
【0002】
トンネル等の内部空間は、建設工事中の掘削や、時間経過に起因する周辺地盤応力分布の不均衡によって変形や損傷を受けたり、それらが進行することによって崩壊にいたる場合がある。そのため、内部空間を健全な状態に維持管理し、建設作業の安全性や効率を向上するとともに建設後も内部空間を安全に利用し続けるためには、常にその状態をモニタリングし、その変状を検出することが重要である。
【0003】
モニタリングされる物理量は地下空間内部や周囲の岩盤に生じた変形や変位、ひずみ、応力、振動、温度など様々であり、ひずみや応力の計測には抵抗線ひずみゲージや振動ワイヤ応力計などが、変位や変形の計測には様々な計測原理に基づく伸縮計が用いられている。
【0004】
最近では、光ファイバを用いた各種のセンシングシステムの応用についても研究、開発が進められている。それらの例を以下に示す。光ファイバの曲げ曲率の変化にともなって光の伝搬損失が変化することを利用したシステムが考案されている。(特許文献2)このシステムでは、計測対象部分に屈曲した光ファイバを設置し、計測対象部分の変位によって生じた屈曲部の光損失をOTDRで計測することによって変位を求めるものである。
【0005】
光ファイバのひずみを分布として計測できるひずみ分布測定器(例えばBOTDR:Brillouin Optical Time Domain Reflectometer)を利用したシステムも開発されている。例えば、トンネル内壁面のひび割れをまたぐように光ファイバを設置し、BOTDRを用いて予め実験的に求めておいた光ファイバのひずみの計測値とひび割れ幅の関係に基づいて、ひび割れ幅を求めるシステムが提案されている。(特許文献1)
【0006】
また、地下鉱山トンネルの天井にロックボルトを打ち込み、該各ロックボルトを1本の光ファイバセンサで結び、該センサの伸縮によりトンネルの変状を検知するシステムがある。(非特許文献1)光ファイバ1本の伸縮が計測されているだけなので、このシステムでは変位を定量的に得ることができない。
壁面と直交する方向の変位、すなわち内空変位を定量的に計測するためのシステムの開発も進められている。(特許文献3)このシステムではトンネル内空に十字に光ファイバセンサが設置され、それぞれについて計測されたひずみとトンネル直径の積として、水平、鉛直方向の直径変化が求められている。
【0007】
一方、特許文献3には、上記従来技術の解決策として半円型内空変位センサが示されている。半円型内空変位センサは半円形に加工したパイプの両側面に光ファイバを固着したものであり、特許文献3の図8に示されるように、円環内部に取り付けることで内部空間を確保しつつ内空変位を計測する。はじめに、センサ上下端に荷重が作用した際に生じる2本の光ファイバのひずみ計測値から水平方向の内空変位を算出する。そして、その算出した水平方向の内空変位と実際に与えた鉛直方向の内空変位との関係を実験的に求めることで、水平方向の内空変位から鉛直方向の内空変位を算出している。
【0008】
また、光ファイバ内にブラッググレーティングを形成し、そこからの反射光の周波数がひずみや温度に依存してシフトする性質を利用したファイバブラッググレーティング(FBG)に基づくシステムもある。(非特許文献2)このシステムではトンネルの1つの断面について、内部空間が確保できるようにその内壁にそって5つのFBGを設置し、FBGを固定している両端の長さ変化として変形を観測している。
【0009】
【特許文献1】特開2001−66117号公報
【特許文献2】特開2001−201411号公報
【特許文献3】特開2008−180672号公報
【非特許文献1】“分布型光ファイバひずみセンシングシステムの地下鉱山変状モニタリングへの適用”,成瀬央,上原秀幹,出口大志,藤橋一彦,大西正敏,R. Espinoza, C. Guzman, C. Pardo, C. Ortega, M. Pinto, 信学技報,社団法人電子情報通信学会,OFT2006-66(2007-1), 71-76 (2007).
【非特許文献2】“高感度FBGによる構造物変形監視システム”,小中隆義,小川浩和,櫻田龍三,高田京平,佐々木一正,信学技報,社団法人電子情報通信学会,OFT2002-36(2002-08), 19-23 (2002).
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記のように、内部空間の様々なモニタリング方法がこれまで提案されているが、各技術にはそれぞれ課題がある。
【0011】
特許文献1の方法は、壁面表面上のひび割れ幅あるいは変位の検出には有効ではあるが、壁面と直交する方向の変位、すなわちトンネル内空変位を求めることは困難である。
特許文献2の方法は、光ファイバの屈曲に変換できる物理量を計測できる利点はあるものの、計測対象数が増える、屈曲が大きくなるにつれて光ファイバの光損失が大きくなるため、計測点数が制限される問題点がある。
特許文献3の方法は、円環構造物の内部空間に利用制限が加わるため、トンネルなどへの適用が困難である。また、特許文献3の図8に示されるような方法は、計測対象へのセンサ設置前に予め水平方向と鉛直方向の内空変位との間の関係を実験的に求める必要があり、設計段階において算出変位の見積もりやシミュレーションができない。また、一箇所のセンサ設置毎に、当該試験をおこなう必要があり、手間や時間がかかる。
【0012】
非特許文献1における方法では、天井の鉛直方向と水平方向の合成変位だけが求められ、水平方向に比べ鉛直方向変位の感度が低く、合成変位の方向によっては変状を検知できないという問題がある。
非特許文献2における方法では、必ずしも内空変位を定量的に計測できていないことや、トンネル内空の利用範囲が制限されるという問題点がある。また、得られるFBGのひずみスペクトルから内空変位を求めようとする場合、設置されたFBGセンサの固定2点間距離の変位しか求めることができず、トンネル内空の垂直方向および水平方向の変位を直接求めることはできない。
【0013】
本発明は、上述した課題を解決するために創案されたものであり、計測対象へのセンサ設置前に水平方向と鉛直方向の内空変位との間の関係を実験的に求める必要がなく、簡便かつ正確に内空変位を計測することができる内空変位計測方法及びその装置を提供することを目的としている。
【課題を解決するための手段】
【0014】
上記課題を解決するため、本発明の内空変位計測システムは、
<1>トンネル状構造物の内空変位を計測する内空変位計測システムであって、前記トンネル状構造物の内壁面に沿って設置され内空と一体に変位する梁手段と、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスと、前記ひずみ検出用デバイスの出力情報を入力として前記トンネル状構造物の鉛直方向および水平方向の変位を計算するコンピュータプログラムと、からなることを特徴とする。
<2>前記<1>の内空変位計測システムは、前記梁手段が、梁部材と、前記梁部材を前記トンネル状構造物の内壁面に固定する1つ以上の固定機構と、前記トンネル状構造物の内空変位を前記梁部材に伝達する1つ以上の内空変位伝達機構と、を具備することを特徴とする。
<3>前記<1>若しくは<2>の何れか1項に記載の内空変位計測システムは、前記コンピュータプログラムが少なくとも次の3ステップを含み鉛直方向および水平方向の変位を計算することを特徴とする。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
<4>前記<3>の内空変位量計算プログラムは、内空変位計測システムのひずみ検出用デバイスからの出力情報を入力とし、少なくとも次のステップを含み内空変位量を計算することを特徴とする。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhにひずみ検出用デバイスに生じるひずみと変位との関係の解析
【0015】
また、本発明の内空変位計測方法は、トンネル状構造物の内空変位を計測する内空変位計測方法であって、前記トンネル状構造物の内空と一体に変位する梁手段を内壁面に沿って設置し、前記梁手段上に、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスを設置し、前記ひずみ検出用デバイスの出力情報を入力として、前記トンネル状構造物の鉛直方向および水平方向の変位を計算して求め、内空変位量とすることを特徴とする。
【発明の効果】
【0016】
本発明によれば、トンネル等の構造物における垂直方向と水平方向の二方向の内空変位を、一つのセンサを用いて同時にモニタリングすることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の構造物内空変位計測装置の構造物への設置構成の一例を示す概略図である。
【図2】曲り梁の変形前と変形後における任意の微小区間の側面図及び断面図を示す。
【図3】曲り梁のたわみ解析に用いるための梁中心線の模式図である。
【図4】本発明の構造物内空変位計測方法における、ひずみから変位を算出する解析工程を示すフローチャート図である。
【図5】本発明の構造物内空変位計測方法の主要工程を示すフローチャート図である。
【図6】曲り梁の変形前後の状態を表した図である。
【図7】鉛直方向荷重Wvによって内空変位センサに生じるひずみと変位の関係を解析するための模式図である。
【図8】水平方向荷重Whによって内空変位センサに生じるひずみと変位の関係を解析するための模式図である。
【図9】本発明の構造物内空変位計測方法を用いた実験装置の一例を示す図である。
【図10】本発明の構造物内空変位計測方法において、内空変位センサと計測対象となる構造物壁面内側との間に設置する、変位伝達機構の一例を示す図である。
【図11】本発明の構造物内空変位計測方法において、ひずみ検出用デバイスとして、ひずみゲージを用いたときの変位計測結果を示す図である。
【図12】本発明の構造物内空変位計測方法において、ひずみ検出用デバイスとして、ファイバブラッググレーティングを用いたときの変位計測結果を示す図である。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照して本発明の一実施形態について説明する。図面は模式的なものであり、現実のものとは異なる。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれている。
本発明における計測装置は図1に示すように、トンネルの内側に設置された内空変位センサ、天井変位と側面変位を内空変位センサに与える変位伝達装置、ひずみ検出用デバイスの信号からひずみを得るひずみ計測装置、計測されたひずみから変位を算出するとともに装置全体を制御するためのコンピュータから構成されている。内空変位センサは、天井変位と側面変位を伝達し、それらの変位に応じたひずみを発生させる曲り梁と、その曲り梁に生じたひずみを検出するために曲り梁に設置したひずみ検出用デバイスの2つからなっている。以下、本特許明細書では、変位やひずみの解析に着目している、すなわち梁単独としての場合には曲り梁と呼び、曲り梁とひずみ検出用デバイスが一体となって機能する場合には内空変位センサと呼ぶこととする。この内空変位センサはその一端がトンネル壁面に固定されている。この内空変位センサを複数設置することによって、多断面の変位計測が行える。
【0019】
実施例を説明する前に、非特許文献3を引用しながら、曲り梁に生じるひずみと変位との関係を与える一般的な力学的解析について説明する。この解析は本内空変位計測における基本となっている。
【非特許文献3】“材料力学上巻”,鵜戸口英善,川田雄一,倉西正嗣, 裳華房, (2006 第44刷).
【0020】
まず,曲り梁に生じるひずみを求める。曲り梁の任意の微小部分を図2に示す。図2(a)のABDCは荷重が作用する前の横断面、ABD'C'は荷重が作用した後の横断面である。この曲り梁の横断面は、荷重を受ける前も荷重を受けてさらに曲った後も平面で、かつ中心線に平行な縦繊維に直交し、梁の中心線に平行な縦繊維は互いに力を及ぼし合わない、また、応力は梁の材料の比例限度を超えることなく、縦弾性係数は引張と圧縮に対し等しいとする.図2(b)
は梁の断面形状の一例を示したものであり、荷重が作用してもこの形状は変わらないものとする。
荷重の作用前後において中心線の長さはGG1からGG1'に、中心線の曲率半径はOG1=ρ0からOG1'=ρに、荷重前後の二つの平面のなす角はdφからdφ+Δdφに変わるから、中心線のひずみε0は以下のように与えられる。(なお、フォント変換の関係上、本明細書の本文におけるφは、数式および図面中では
と表わす。)
【数1】
数式1および数式2では、⌒は円弧の長さを示すものとする。また、中心線から距離ηだけ離れた繊維PP1のひずみεは、ηが変形の前後において変わらないものとすると、
【数2】
となるので、数式2に数式1を代入して
【数3】
が得られる。ここでηは曲率中心から離れる方向を正とする。角度dφの変化の割合をωとして
【数4】
とおくと、数式3は以下のように書ける。
【数5】
したがって、この梁の材料の縦弾性係数をEとすると、梁の縦繊維と垂直方向には応力が作用していないとしているので、PP1に作用する応力σは、
【数6】
となる。数式6より、ε0とωが求められれば応力σを計算できることがわかる。
これらのε0とωは、力とモーメントについての平衡条件から以下のように求められる。曲り梁には曲げモーメントMと軸力Nが作用しているとすると、各断面における応力の総和が軸力Nに等しいことから次式が成り立つ。
【数7】
ここで、軸力Nの符号として、引張りには正、圧縮には負を与える。一方、曲げモーメントMの平衡から次の関係式が成り立つ。
【数8】
ここで、曲げモーメントMは曲率半径が小さくなるように働く方向を正とする。ところで
【数9】
であり、梁の主軸に対する断面一次モーメントは0であるから
【数10】
である。数式7と数式8はそれぞれ
【数11】
【数12】
と書くことができる。今、
【数13】
とおき、数式9を考慮すれば
【数14】
が得られる。数式14において、κは曲り梁の断面係数であり、梁の断面形状、寸法、変形前の曲り梁中心線の曲率半径が与えられると定まる正の数である。これらの関係を力とモーメントの平衡式である数式11と数式12に代入すると
【数15】
【数16】
が得られる。数式16を数式15に代入することによってε0は
【数17】
と、また、数式16に数式17を代入することによってωは
【数18】
と求められる。したがって、曲り梁に働く応力σとひずみεは、それぞれ数式19、数式20として求められる。
【数19】
【数20】
【0021】
次に曲り梁のたわみ、すなわち変位について解析する。曲り梁の中心線の模式図を図3に示す。弧ORは、曲り梁の任意の区間の中心線を表す。この曲り梁は原点Oで固定されており、原点Oを直交座標xyの交点にとる。この曲り梁に荷重が作用して中心線上の任意点P(x,y)における長さPQ=dsの微小中心線がたわんだために、点Qの点Pに対する傾き角dφがΔdφ変化し点Rが点Sに変位したとすると、このΔdφによる点R(x1,y1)のx、y軸方向の微小変位dδx、dδyは、Δdφが微小であるとするとそれぞれ次のようになる。
【数21】
【数22】
ここで点Tは、点Rを通りy軸に平行な直線と、点Sを通りx軸に平行な直線との交点である。また数式21および数式22では、 ̄は2点間の距離を示すものとする。なお、変形後の梁中心線は点Pと点Qを結ぶ曲線となるが、図の見やすさを考え、図3には示していない。また、数式21、数式22では数式4のω=Δdφ/dφの関係を用いている。数式18より、
【数23】
であるので、このωを数式21と数式22に代入するとdδx、dδyはそれぞれ
【数24】
【数25】
となる。したがって、曲り梁に荷重が作用してOR間がたわんだために点Rに生じた変位のx成分δxとy成分δy、および点Rの傾き角の変化iはそれぞれ次のように、dδx、dδy、ωをφ0からφ1まで積分することによって求めることができる。
【数26】
【数27】
【数28】
【0022】
以上は中心線の傾斜の変化ωによる変位であるが、これに中心線自身のひずみε0による変位を加える必要がある。
PQ=ds間の中心線のひずみによる点R(x1,y1)の変位のx成分をdδ’x、y成分をdδ’yとすると
【数29】
【数30】
であり、数式17からε0は
【数31】
であるから、点Oから点Rまでの中心線のひずみによるR点の変位のx成分δ’xとy成分のδ’yはそれぞれ次のように求められる。
【数32】
【数33】
したがって、中心線の伸縮をも考慮に入れた場合のR(x1,y1)点の変位のx成分とy成分δx+δ’x、δy+δ’yはそれぞれ次式で与えられる。
【数34】
【数35】
中心線のひずみε0は傾き角に対しては影響を与えないので、中心線の伸縮を考慮に入れた場合にもR点の傾き角の変化は数式28のままでよい。上述の解析結果、ひずみと変位の関係に関する基礎方程式として数式20、数式34、数式35が得られた。
【0023】
図4は、本発明の一実施形態にかかる内空変位計測方法における解析工程を示すフローチャート図である。本発明における計測方法では、図4に示したように、鉛直方向と水平方向の変位すなわち天井と側面の変位が与えられたときに曲り梁に生じるひずみから、鉛直方向と水平方向の変位を算出する解析工程であるステップS1からステップS3に基づいて、それらの変位を算出する。以下では、図4に示したフローチャートを用いて、まず、曲り梁のひずみと変位の解析工程であるステップS1からステップS3について説明する。
【0024】
内空変位センサに用いられている曲り梁の変形前後の状態を、それぞれ図6(a)、(b)に示す.図の曲り梁の左端はトンネル側面に固定された固定端であり、一点鎖線で示されている梁の中心線の半径はrである。また、梁中心線からひずみ検出用デバイスが取り付けられている梁表面までの距離はhである。固定端における梁中心線の位置を原点Oとし、原点Oと梁中心線の曲率中心Cとを結ぶ軸をx軸、x軸と直交し原点Oを通る軸をy軸とする.また、点Cを中心にx軸負方向から右回りに角度θをとる。トンネルの天井や側面の変位を計測することを考え、x軸、y軸をそれぞれ水平、鉛直方向にとることにし、天井と側面に対応する、すなわち角度θがπ/2、πである梁の中心線位置を、それぞれ点T(r, r)、S(2r,0)とする。また、天井、側面が変位し、それにともなって点T、点Sにそれぞれ荷重Wv、Whが作用し点T’、点S’に変位したとする。実際には、これらの変位や荷重は梁表面に与えられるが梁の断面形状は変わらず、荷重は対応する梁中心線位置に作用しており、梁表面での変位と中心線位置での変位は同じであるとする。本内空変位計測では、天井変位としてTT’の鉛直方向成分ΔyT 、側面変位としてSS’の水平方向成分ΔxSを同時に求める。半径rに対し変位は微小であるので、ΔyTは点Tの鉛直方向変位、また、ΔxSは点Sの水平方向成分とみなすこともできる。これらの解析にあたって、引張ひずみと引張応力には正の符号、圧縮ひずみと圧縮応力には負の符号を与える.またx、y軸正方向の荷重と変位には正の符号、x、y軸負方向の荷重と変位には負の符号を与える。以下では、鉛直、水平方向に荷重Wv、Whが独立して作用する状態を別々に解析し、重ね合わせの原理に基づいて両荷重が同時に作用した場合の結果を求めていく。
【0025】
ステップS1は、鉛直方向荷重Wvによって内空変位センサに生じるひずみと変位を解析するステップである。そのときの解析モデルを図7に示す。図7(a)は、天井の変位が与えられる点Tに鉛直方向荷重Wvが作用し、その結果として角度θの断面において接線方向に軸力Nv、半径方向にせん断力Fv、曲げモーメントMvが発生している様子を示している。図7(a)より明らかなように、
【数36】
【数37】
である.ここで、数式36と数式37を数式17に代入すると、この荷重条件では
【数38】
となる。これは、中心線におけるひずみが0であることを示している。したがって、Wvのみ作用する場合の角度θにおける曲り梁のひずみεv(θ)は、数式38を考慮して数式20に数式37を代入することによって次のように求められる。
【数39】
数式39は、鉛直方向荷重Wvが単独で作用する場合にはひずみは0≦θ<π/2の範囲のみで生じ、π/2≦θ<πの範囲ではひずみが生じないため曲り梁は変形することなくもとのままの形状を保つことを示している。
【0026】
つぎに数式34、数式35に基づいて、図7(b)に示す鉛直方向荷重Wvだけが作用している場合の、天井の鉛直方向変位ΔyT,vと水平方向変位ΔxT,v変位について解析する。実際の計測では曲り梁中心線半径に比べ変位は微小なので、変位によって生じる曲り梁の変形にともなう、梁に対する荷重点の相対位置の変化は無視できるものとする。この場合、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π/2、r、rであり、
【数40】
であるので、数式38を考慮することによって、数式34、数式35よりΔxT,vとΔyT,vはそれぞれ以下のように得られる。
【数41】
【数42】
また、傾き角の変化iは数式28より上と同様にして以下のように求められる。
【数43】
ここでさらに、側面の鉛直、水平方向変位ΔyS,v、ΔxS,vを求める。点Tに鉛直方向荷重Wvが作用している状態では前述したように、梁のTS部にはひずみは生じないため、TS部はもとの形状を保ったまま点Sは点S’に変位する。すなわち、点S’(xS’,yS’)は点C’(xC’,yC’)を中心に、点T’(xT’,yT’)をπ/2回転した位置となる。したがって、これらの関係は次式で与えられる。
【数44】
また、点T(xT’,yT’)、点C’(xC’,yC’)、変位ΔxT,vとΔyT,vについての幾何学的関係から、
【数45】
【数46】
【数47】
【数48】
が成り立つ。数式45から数式48を数式44に代入すると、
【数49】
が得られる。さらに、求めるべき側面の鉛直、水平方向変位ΔyS,v、ΔxS,vと点S’(xS’,yS’)の関係は
【数50】
【数51】
で与えられるので、数式49、数式50、数式51より
【数52】
【数53】
が得られる。傾き角の変化iは微小として
【数54】
とすると数式52、数式53は次のように近似される。
【数55】
数式41、数式42、数式43を数式55に代入すると、変位ΔyS,v、ΔxS,vはそれぞれ以下のように求められる。
【数56】
【数57】
【0027】
ステップS2は、水平方向荷重Whによって内空変位センサに生じるひずみと変位との関係を解析するステップである。そのときの解析モデルを図8に示す。図8(a)は、側面の変位が与えられる点Sに水平方向荷重Whが作用し、その結果として角度θの断面において接線方向に軸力Nh、半径方向にせん断力Fh、曲げモーメントMhが発生している様子を示している。図8(a)より明らかなように、
【数58】
【数59】
である。ここで、数式58と数式59より、この荷重条件では
【数60】
である。なおステップS1の場合と同様、これは中心線におけるひずみが0であることを示している。したがって、Whのみ作用する場合の角度θにおける曲り梁のひずみεh(θ)は,数式60を考慮して数式20に数式59を代入することによって次のように求められる。
【数61】
数式61は、水平方向荷重Whが単独で作用する場合、0<θ<πの範囲でひずみが生じ、曲り梁は全体が変形することを示している。
ステップS1と同様にはじめに、数式34、数式35に基づいて水平方向荷重Whだけが作用している場合における天井の鉛直方向変位ΔyT,hと水平方向変位ΔxT,h変位について解析する。この場合においても、曲り梁中心線半径に比べ変位は微小で、曲り梁の変形にともなう荷重点の梁に対する相対位置の変化は無視できるものとする。また、曲り梁は変位計測範囲を考慮し、図6、図8に示されているように半円より大きな円弧をもつものであってもよい。本荷重条件でも図8(b)に示すように、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π/2、r、rであり、
【数62】
であるので、数式60を考慮することによって、数式34、数式35よりΔxT,vとΔyT,vはそれぞれ以下のように得られる。
【数63】
【数64】
【0028】
次に、水平方向荷重Whだけが作用している場合における側面の水平方向変位ΔxS,hと鉛直方向変位ΔyS,hについて解析する。この場合、数式34、数式35の積分範囲φ0とφ1、x1とy1はそれぞれ0、π、2r、0であり、
【数65】
であるので、数式34、数式35より
【数66】
【数67】
である。
ステップS3は、重ね合わせの原理に基づいて水平方向と鉛直方向の荷重WhとWvによって曲り梁に生じるひずみと変位との関係の解析するステップである。水平方向荷重Whと鉛直方向荷重Wvとが同時に作用した場合に生じるひずみε(θ)は、重ね合わせの原理より、水平、鉛直方向荷重が単独で作用したときのひずみεh(θ)、εv(θ)の和として得られる。したがって、ε(θ)は、
【数68】
と求められる。一方、水平方向荷重Whと鉛直方向荷重Wvとが同時に作用した場合の天井変位、すなわち点Tの鉛直方向変位ΔyTは、WhとWvによって生じる変位ΔyT,vとΔyT,hの和として求められるので、数式42、数式64より
【数69】
であり、側面変位、すなわち点Sの水平方向変位ΔxSは、WhとWvによって生じる変位ΔxS,vとΔxS,hの和として求められるので、数式56、数式66よりΔxSは、
【数70】
となる。数式68、数式69、数式70より、角度θ1(0≦θ1<π/2)とθ2(π/2≦θ2<π)でひずみε1とε2が観測されたとすると、これらのひずみと、天井と側面の変位ΔyTとΔxSとの関係は次のように求められる。
【数71】
【数72】
したがって、数式71と数式72から、内空変位センサ各部の寸法、すなわち用いられている曲り梁の中心線半径r、梁中心線からひずみ検出用デバイスが取り付けられている梁表面までの距離η、2つのひずみ検出用デバイスが取り付けられている角度θ1とθ2を求めておくことによって、それらのデバイスで検出されたひずみε1とε2から天井と側面の変位ΔyT、ΔxSを算出できる.
【0029】
次に、内空変位センサを設置し、実際に変位を計測する変位モニタリング工程について図5を用いて説明する。図5は、本発明の一実施形態にかかる内空変位計測方法を示すフローチャート図である。内空変位センサ表面において計測されたひずみから変位を計測する工程である、ステップA1からステップA4に基づき計測する。ステップA1は、内空変位センサに用いる曲り梁各部の形状や寸法、材料などを選定する工程である。モニタリングするトンネルの大きさに基づいて、曲り梁の中心線半径を決定する。また、計測する最大変位、そのときのひずみなどを考慮して梁の断面形状や材質を決める。ステップA2は、内空変位センサを計測対象に設置する工程である。例えば図1や図9(a)に示すように、曲り梁の一端を固定するとともに、天井と側面の変位を曲り梁に与える変位伝達装置を設置する。ステップA3は、内空変位センサである曲り梁に生じるひずみを、ひずみ検出用デバイスで計測する工程である。曲り梁外側表面に生じるひずみε1とε2を、曲り梁に取り付けられたひずみ検出用デバイスを用いて計測する。ステップA4は、計測されたひずみから天井と側面の変位を算出するステップである。なお、図4に示した解析工程は、図5のステップA4における変位算出ステップにおいて適用する。
【実施例】
【0030】
次に、本発明による内空変位計測方法を用いた実験結果について説明する。今回構築した実験装置の概要を図9(a)に、また、ひずみ検出用デバイスが取り付けられている角度θ1の箇所の断面を図9(b)に示す。この実験装置には曲り梁として、中心線半径rが992mm、内外径が52mm、58mmのアルミニウム製パイプが用いられている。今回の計測では、鉛直方向荷重と水平方向荷重をx軸、y軸の正から負方向に、すなわち天井と側面変位いずれも梁の外側から外側表面に与えるようにした。数式68は角度θが0からπ/2の範囲では、θが0に近い場合に鉛直方向荷重Wvがひずみε(θ)の支配的要因となるが、π/2からπの範囲ではθがπ/2に近づくにつれてひずみの大きさが大きくなることを示している。このことと、変位伝達装置とひずみ検出用デバイスとの干渉を考え、今回は角度θ1と角度θ2がπ/12と19π/36となる曲り梁(パイプ)の外側表面位置にひずみ検出用デバイスを取り付けた。本実施例では、当該デバイスとして、ひずみゲージとファイバブラッググレーティングのそれぞれを用いた場合について実験をおこない、本発明による計測方法の効果を確認した。
【0031】
ステップA2により、図9(a)に示したように、曲り梁の一端を固定するとともに、天井と側面の変位を曲り梁に与える変位伝達装置を設置する。図10は変位伝達装置の一例であり、これを天井と側面に設置する。特許文献3ではパイプの両端の固定に回転支点が用いられているが、本発明では、点Tと点Sを回転支点としてこれらの点に変位を付与する場合には、曲り梁はOT間が一端固定端他端自由支持梁、TS間が回転端アーチの連続梁(不静定梁)となるため、図4のステップS1からステップS3の解析の前提を満たさない。そこで、この前提を満たすために移動支点としている。この移動支点の一例として、図10には、ローラーを用いた回転機構を通して点Tと点Sに天井と側面の変位を伝達する変位伝達装置が示されている。
【0032】
ステップA3により、内空変位センサである曲り梁に生じるひずみを、ひずみ検出用デバイスで計測する。前述したように今回のシステムでは、角度θ1=π/12とθ2=19π/36の曲り梁外側表面に生じるひずみε1とε2を、曲り梁に取り付けられたひずみ検出用デバイスを用いて計測する。本実施例では、当該デバイスとして、ひずみゲージとファイバブラッググレーティングのそれぞれを用いた場合について計測した。
【0033】
ステップA4により、計測されたひずみから天井と側面の変位を算出する。今回は天井と側面変位のいずれの方向についても、変位を0から、曲り梁中心線直径1984mmの約1%に相当する20mmまで、上述したように梁の外側から内側に向けて、すなわちx軸、y軸の負方向に変位を4mm間隔で与えた。そしてそのとき生じたひずみをひずみ検出用デバイスで計測し、それより天井と側面変位を算出した。
【0034】
当該ひずみ検出用デバイスとして、ひずみゲージを用いたときの変位計測結果を図11に、ファイバブラッググレーティングを用いたときの変位計測結果を図12に示す。図11と図12のいずれにおいても横軸は側面変位、縦軸は天井変位であり、●は与えた変位、○は得られた変位である。これらは、力学的解析結果と内空変位センサの各部の寸法を用いただけの実験結果であり、従来のように、事前に校正曲線を得るための実験を行っていない。それにもかかわらず、誤差の大きかったファイバブラッググレーティングであっても、誤差は変位の10%程度であった。同じ内空変位センサを用いた場合でもひずみゲージでの誤差はより小さいので、前者の誤差は本方法に起因するものではなく、使用するひずみ検出用デバイスによるものでると考えている。本発明の有効性を確認するために今回構築した実験装置では、構築の容易さから、前述したように外側から内側にだけ変位を与える変位伝達機構を採用した。その結果、ステップS1からステップS3での解析から得られるように、内空変位センサは天井か側面の一方が内側に変位すると、もう一方も内側に変位しローラーが梁から離れるため、本荷重条件では一方の変位は計測できるが、両方の変位を計測できない場合が生じる。図11と図12の破線が求められた境界であり、両破線の外側は一方の変位しか計測できない領域である。実験結果はこの境界を明確に示しており、解析の妥当性が確認される。この解決のためには、ローラーを梁の反対側(今回の実験装置では内側)にも取り付ければよく、これによって、常に両方向の変位を得ることができる。変位計測結果は、ひずみ検出用デバイスによらず、側面と天井の変位を同時に計測できることを示している。
【産業上の利用可能性】
【0035】
本発明は、トンネルのモニタリングにとって重要な天井と側面の変位、すなわち二方向の変位を同時計測できる方法を提供するものであり、トンネル以外にも岩盤、山肌をはじめとする二方向変位同時計測が必要な構造物や空間の変形、挙動を監視するシステムに用いることができる。また本発明は、粉塵が浮遊していて光学的モニタリングが行いえない対象の変位モニタリングが行える利点がある。加えて、ひずみ検出用デバイスとして一般的に用いられているひずみゲージを用いても本発明を実施することもできるが、ファイバブラッググレーティングなどのように長距離多点計測が可能で防爆性が高いデバイスを用いることによって、電気設備がほとんどない地下炭鉱のような対象に対しても、火災を心配することなく広範囲にわたる内空変位計測が実現できる利点がある。さらに、変位計測する際に、事前に校正曲線を得るための試験作業をする必要がないことも実用的な利点である。
【特許請求の範囲】
【請求項1】
トンネル状構造物の内空変位を計測する内空変位計測システムであって、
前記トンネル状構造物の内壁面に沿って設置され内空と一体に変位する梁手段と、
前記梁手段に生じるひすみをセンシングするひずみ検出用デバイスと、
前記ひずみ検出用デバイスの出力情報を入力として前記トンネル状構造物の鉛直方向および水平方向の変位を計算するコンピュータプログラムと、
からなることを特徴とする内空変位計測システム。
【請求項2】
前記梁手段が、梁部材と、
前記梁部材を前記トンネル状構造物の内壁面に固定する1つ以上の固定機構と、
前記トンネル状構造物の内空変位を前記梁部材に伝達する1つ以上の内空変位伝達機構と、
を具備することを特徴とする請求項1に記載の内空変位計測システム。
【請求項3】
前記コンピュータプログラムが少なくとも次の3ステップを含み鉛直方向および水平方向の変位を計算することを特徴とする請求項1若しくは2の何れか1項に記載の内空変位計測システム。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
【請求項4】
内空変位計測システムのひずみ検出用デバイスからの出力情報を入力とし、少なくとも次のステップを含み内空変位量を計算することを特徴とする内空変位量計算プログラム。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
【請求項5】
トンネル状構造物の内空変位を計測する内空変位計測方法であって、
前記トンネル状構造物の内空と一体に変位する梁手段を内壁面に沿って設置し、
前記梁手段上に、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスを設置し、
前記ひずみ検出用デバイスの出力情報を入力として、前記トンネル状構造物の鉛直方向および水平方向の変位を計算して求め、内空変位量とすることを特徴とする内空変位計測方法。
【請求項1】
トンネル状構造物の内空変位を計測する内空変位計測システムであって、
前記トンネル状構造物の内壁面に沿って設置され内空と一体に変位する梁手段と、
前記梁手段に生じるひすみをセンシングするひずみ検出用デバイスと、
前記ひずみ検出用デバイスの出力情報を入力として前記トンネル状構造物の鉛直方向および水平方向の変位を計算するコンピュータプログラムと、
からなることを特徴とする内空変位計測システム。
【請求項2】
前記梁手段が、梁部材と、
前記梁部材を前記トンネル状構造物の内壁面に固定する1つ以上の固定機構と、
前記トンネル状構造物の内空変位を前記梁部材に伝達する1つ以上の内空変位伝達機構と、
を具備することを特徴とする請求項1に記載の内空変位計測システム。
【請求項3】
前記コンピュータプログラムが少なくとも次の3ステップを含み鉛直方向および水平方向の変位を計算することを特徴とする請求項1若しくは2の何れか1項に記載の内空変位計測システム。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
【請求項4】
内空変位計測システムのひずみ検出用デバイスからの出力情報を入力とし、少なくとも次のステップを含み内空変位量を計算することを特徴とする内空変位量計算プログラム。
(1)鉛直方向荷重Wvによってひずみ検出用デバイスに生じるひずみと変位の解析
(2)水平方向荷重Whによってひずみ検出用デバイスに生じるひずみと変位の解析
(3)鉛直方向と水平方向の荷重WvとWhによってひずみ検出用デバイスに生じるひずみと変位との関係の解析
【請求項5】
トンネル状構造物の内空変位を計測する内空変位計測方法であって、
前記トンネル状構造物の内空と一体に変位する梁手段を内壁面に沿って設置し、
前記梁手段上に、前記梁手段に生じるひずみをセンシングするひずみ検出用デバイスを設置し、
前記ひずみ検出用デバイスの出力情報を入力として、前記トンネル状構造物の鉛直方向および水平方向の変位を計算して求め、内空変位量とすることを特徴とする内空変位計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−47629(P2013−47629A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−185766(P2011−185766)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(304026696)国立大学法人三重大学 (270)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(304026696)国立大学法人三重大学 (270)
【Fターム(参考)】
[ Back to top ]