
構造物据付のための画像情報取得装置および構造物据付誘導システム
【課題】据え付け対象である構造物を基礎杭等の目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認可能な画像情報取得装置および構造物を確実に精度よく目標物に据え付けることができる構造物据付誘導システムを提供する。
【解決手段】この構造物据付のための画像情報取得装置12は、据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得するものであって、空中、水面または水中で画像取得可能なカメラ部13と、構造物に設置されてカメラ部を支持する支持部14と、カメラ部を水面に浮上させる浮体部15と、を備え、カメラ部が浮体部により水面で浮上することで目標物が水中にある場合でもカメラ部が目標物の画像を取得する。
【解決手段】この構造物据付のための画像情報取得装置12は、据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得するものであって、空中、水面または水中で画像取得可能なカメラ部13と、構造物に設置されてカメラ部を支持する支持部14と、カメラ部を水面に浮上させる浮体部15と、を備え、カメラ部が浮体部により水面で浮上することで目標物が水中にある場合でもカメラ部が目標物の画像を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、据え付け対象である構造物と基礎杭などの目標物との相対位置を目視して把握可能な画像情報取得装置およびこの装置を用いた構造物据付誘導システムに関する。
【背景技術】
【0002】
水上構造物の構築の際には、従来、陸上部の2方向(法線、法線直角)から光波測距儀を使用し、据え付け対象物の位置を測量し、無線機で目標物である基礎杭までの誘導を行い、据え付け対象物を基礎杭に据え付けていた。また、水上構造物の構築のために水底に打設された基礎杭に据え付け対象物であるジャケットのレグを差し込む工法が公知である。この差し込み施工の際、非特許文献1のように、ジャケットレグの基礎杭への差し込みを効率的に精度よく行うために、ジャケットレグ内に配置したカメラによりモニタリングしてジャケットレグと基礎杭との相対位置を把握し、GPSを用いてジャケットを基礎杭に対して誘導し、位置調整を行いながらジャケットレグを基礎杭へ差し込んでいる。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】「D滑走路建設工事におけるジャケット式桟橋の海上施工について」(http://www.haneda-d.jp/pdf/tec05_3.pdf)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、レグ内カメラによりレグと基礎杭との平面相対位置の把握が可能であるのは、基礎杭が水面から突き出ているときであり、例えば、干満差により、基礎杭が水没している場合には把握できないので、干満差の大きい地域では施工期間が限られてしまうという問題があった。また、レグ内カメラによる夜間における把握も不可能であった。
【0005】
本発明は、上述のような従来技術の問題に鑑み、据え付け対象である構造物を基礎杭等の目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認可能な画像情報取得装置および構造物を確実に精度よく目標物に据え付けることができる構造物据付誘導システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための構造物据付のための画像情報取得装置は、据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得する構造物据付のための画像情報取得装置であって、空中、水面または水中で画像取得可能なカメラ部と、前記構造物に設置されて前記カメラ部を支持する支持部と、前記カメラ部を水面に浮上させる浮体部と、を備え、前記カメラ部が前記浮体部により水面で浮上することで前記目標物が水中にある場合でも前記カメラ部が前記目標物の画像を取得することを特徴とする。
【0007】
この構造物据付のための画像情報取得装置によれば、カメラ部が浮体部により水面で浮上することで目標物が水面または水中にある場合でもカメラ部が目標物の画像を取得することができるので、据え付け対象である構造物を目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができる。
【0008】
上記画像情報取得装置において前記カメラ部は、底面が光透過性である収納部を備えるか、または、水中撮影が可能な水中カメラから構成されることが好ましい。
【0009】
また、前記カメラ部の近傍に照明部を設けることで、夜間等のため水中の目標物の画像が把握しにくい場合にも対応可能である。
【0010】
また、前記構造物が水面側に移動したとき、前記カメラ部が前記浮体部により移動して水面に対する相対位置を一定に保つように前記支持部が前記カメラ部を支持することにより、構造物が据え付けの進行とともに水面近くへ移動したとき、カメラ部はそれに追随して水面に対する相対位置を保つので、目標物の画像の取得を続けることができるとともに、カメラ部が構造物側の画像をも撮影して取得できる。
【0011】
また、前記目標物が水底地盤に打設された杭で、前記構造物の据付部が前記杭に挿入される開口部である場合、前記カメラ部は、そのカメラが前記開口部の中心軸に位置するように前記支持部に支持されることにより、目標物の画像の位置から目標物と開口部との相対位置を把握することができる。
【0012】
上記目的を達成するための構造物据付誘導システムは、上記構造物据付のための画像情報取得装置と、前記画像情報取得装置で取得した画像情報の通信手段と、前記通信手段により送られた前記画像情報取得装置による画像情報をモニタ表示するモニタ装置と、を備え、据え付け対象の構造物の据付部の目標となる目標物の画像を前記モニタ装置に表示することを特徴とする。
【0013】
この構造物据付誘導システムによれば、据え付け対象である構造物の据付部の目標となる目標物の画像をモニタ装置に表示できるので、かかる画像を目視し確認しながら据え付け対象の構造物の据え付けのための移動操作を行うことができる。このとき、目標物が水中にある場合でも目標物の画像を取得することができるので、目標物が水没している場合にも据え付け対象である構造物を基礎杭等の目標物に確実に精度よく据え付けることができる。
【0014】
上記構造物据付誘導システムにおいて前記据え付け対象の構造物の据え付けの進行とともに前記構造物の据付部の画像をも前記モニタ装置に表示することが好ましい。
【0015】
また、前記据え付け対象の構造物の位置情報を取得する光波測距儀による誘導装置をさらに備え、前記位置情報に基づいて前記構造物を前記目標物に向けて誘導することにより、目標物の画像をモニタ装置に表示可能となる前の段階において、据え付け対象である構造物を目標物に向けて誘導することができる。
【発明の効果】
【0016】
本発明の画像情報取得装置によれば、据え付け対象である構造物を目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができる。
【0017】
また、本発明の構造物据付誘導システムによれば、目標物が水没している場合にも構造物を確実に精度よく目標物に据え付けることができる。
【図面の簡単な説明】
【0018】
【図1】本実施形態による構造物据付誘導システムの全体を概略的に示す図である。
【図2】図1の自動追尾式光波測距儀による誘導装置11の概略構成を示す図で、受梁上に設置される自動追尾式光波測距儀用ミラー(a)、既設構造部上に設置される自動追尾式光波測距儀等(b)、および、起重機船のクレーン操作室に設置されるパソコン等(c)を示す。
【図3】図1の受梁上に設置される画像情報取得装置の概略構成を示す図(a)、および、画像情報取得装置からの画像情報を表示するために起重機船のクレーン操作室に設置されるパソコン、モニタ等を示す図(b)である。
【図4】図1,図3の画像情報取得装置を示す側面図である。
【図5】図4の画像情報取得装置の上面図である。
【図6】図4の画像情報取得装置の底面図である。
【図7】本実施形態における据え付け対象の構造物(受梁)の開口部と目標物である基礎杭との相対位置関係を示す図で、ずれた位置(a)、一致した据付位置(b)、開口部に基礎杭が入った位置(c)、および、据え付けが完了した位置(d)をそれぞれ示す。
【図8】図3(b)のモニタ44に表示されるモニタ画像を概略的に示す図で、図7(a)〜(d)の位置関係と対応するモニタ画像(a)〜(d)をそれぞれ示す。
【図9】本実施形態の構造物据付誘導システム10による図1の受梁の据え付け操作全体の工程S01〜S16を説明するためのフローチャートである。
【発明を実施するための形態】
【0019】
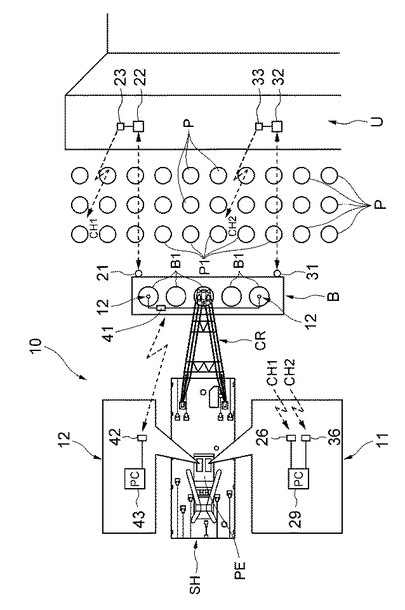
以下、本発明を実施するための形態について図面を用いて説明する。図1は本実施形態による構造物据付誘導システムの全体を概略的に示す図である。
【0020】
図1に示すように、構造物据付誘導システム10は、水底地盤に多数本打設された基礎杭Pに対し、水上構造物構築のためのジャケットを構成するRC製の受梁Bを、起重機船SHのクレーンCRの操作により基礎杭Pへ設置する際に誘導し、受梁Bの基礎杭Pに対する位置合わせを目視し確認できるように構成したものである。
【0021】
構造物据付誘導システム10は、自動追尾式光波測距儀による誘導装置11と、カメラによる画像情報取得装置12と、を備える。図1の起重機船SHのクレーン操作室PEでは、構造物据付誘導システム10の自動追尾式光波測距儀による誘導装置11からの位置情報に基づいて受梁Bを設置目標の基礎杭P1へと向けて移動させるとともに、カメラによる画像情報取得装置12からの画像情報に基づいて受梁Bの円筒状の開口部B1と基礎杭P1との最終的な位置合わせを目視し確認しながら行うことができる。
【0022】
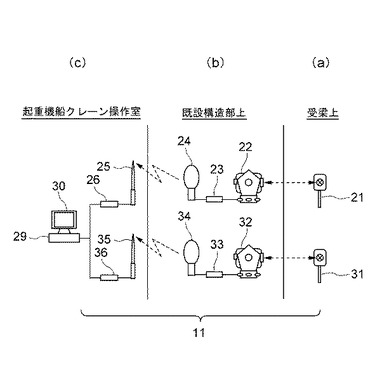
図2は、自動追尾式光波測距儀による誘導装置11の概略構成を示す図で、受梁上に設置される自動追尾式光波測距儀用ミラー(a)、既設構造部上に設置される自動追尾式光波測距儀等(b)、および、起重機船のクレーン操作室に設置されるパソコン等(c)を示す。
【0023】
自動追尾式光波測距儀による誘導装置11は、次のように構成され、図1のように、2つの自動追尾式光波測距儀による測定チャンネルCH1,CH2を有する。すなわち、図2(a)の自動追尾式光波測距儀用ミラー21,31を据え付け対象の受梁Bの各所定位置にそれぞれ設け、図2(b)の既設構造部の上部工U上に自動追尾式光波測距儀22,32,特定省電力無線装置23,33,および、送信アンテナ24,34を設置し、起重機船SHのクレーン操作室PEに、受信アンテナ25,35,特定省電力無線受信機26,36,および、パソコン(PC)29,および、モニタ30を設置する。
【0024】
自動追尾式光波測距儀22,32は受梁Bのミラー21,31をターゲットにして視準し、その測定データを、送信機23,33,送信アンテナ24,34により無線伝送し、受信アンテナ25,35,受信機26,36により受信するようにして測定チャンネルCH1,CH2により送受信することで、パソコン29に入力する。パソコン29では、測定データから受梁Bの座標位置情報を算出し、受梁Bの座標位置情報に基づいて解析を行い、受梁Bの目標物への移動量情報を算出し、受梁Bの現在の座標位置情報、現在方位および傾斜角など、ならびに、受梁Bの移動量情報および目標方位などをモニタ30に表示する。これにより、起重機船SHのクレーン操作室PEでは、受梁Bの現在の位置や必要な移動量や目標方位をモニタ30でリアルタイムに目視し確認できる。
【0025】
なお、自動追尾式光波測距儀22,32は、自動追尾式トータルステーションともよばれ、自動追尾式光波測距儀用ミラー21,31をターゲットとして自動視準および自動追尾を行うもので、市販のものを使用できる。
【0026】
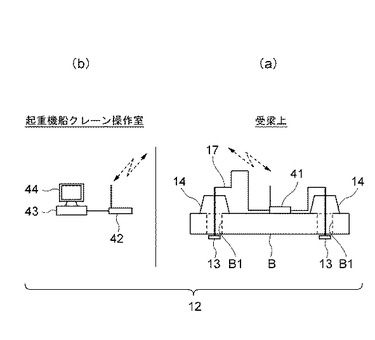
図3は、受梁上に設置される画像情報取得装置の概略構成を示す図(a)、および、画像情報取得装置からの画像情報を表示するために起重機船のクレーン操作室に設置されるパソコン、モニタ等を示す図(b)である。
【0027】
画像情報取得装置12は、図3(a)のように、据え付け対象の受梁Bの開口部B1の下方に設置されるカメラ部13と、通信機41,42と、パソコン43と、モニタ44と、を備える。カメラ部13は、目標物の基礎杭の画像情報を取得する。
【0028】
画像情報取得装置12は、図3(a)、(b)のように、カメラ部13で取得した画像情報を通信機41により無線で送信し、図1の起重機船のクレーン操作室に設置された通信機42で受信しパソコン(PC)43に送り、モニタ44に表示する。また、パソコン43側から通信機42、41を通して操作情報を送信し、カメラ部13を操作することができる。通信機41,42は無線LAN機器から構成できる。
【0029】
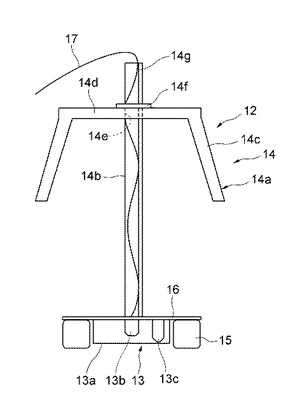
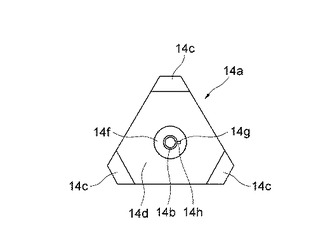
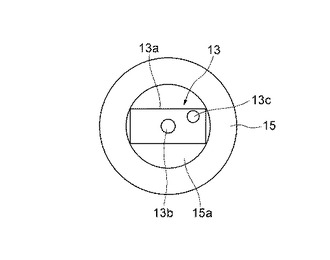
次に、図4〜図6を参照して画像情報取得装置12について説明する。図4は画像情報取得装置を示す側面図である。図5は図4の画像情報取得装置の上面図、図6は底面図である。
【0030】
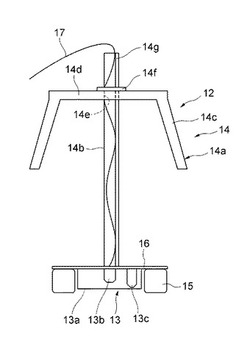
図4〜図6のように、画像情報取得装置12は、さらに、据え付け対象の構造物に設置されてカメラ部13を支持する支持部14と、カメラ部13を水面で浮上させる浮体部15と、を備える。カメラ部13は、CCD撮像素子やレンズ等から構成されるカメラ13bと、ライト13cと、カメラ13bおよびライト13cを収納し密閉された箱状の収納部13aと、を有し、収納部13aが浮体部15と一体になって水面に浮上するようになっている。
【0031】
収納部13aは、底面がアクリル板などから光透過性に構成されるとともに全体が密閉され防水構造となっている。収納部13aに収納したカメラ13bにより水中の基礎杭などの目標物の画像撮影が可能であり、また、この画像撮影のときライト13cにより水中の基礎杭などの目標物を照明することができる。
【0032】
支持部14は、据え付け対象の構造物上に櫓状に設置される固定部14aと、固定部14aに支持されて、下端でカメラ部13を支持する円筒管からなる支柱14bと、を有する。
【0033】
図4,図5のように、固定部14aは、平面的に等間隔に並べられた複数の脚14cと、脚14cの上に載る平板14dと、を有する。円筒管からなる支柱14bは、平板14dの中央に設けられた貫通孔14e(図4の破線で示す)を上下動できるように緩やかに貫通している。支柱14bの所定位置の周囲に支柱14bよりも大径の円盤状の落下防止部14fが設けられて固定されている。支柱14bは、図4の位置で落下防止部14fにより支持され、その位置に保持されるが、カメラ部13が浮体部15により浮き上がると、それに追随して上側に移動する。
【0034】
また、円筒管からなる支柱14bには長手方向に延びる回転防止部14gが支柱14bの外周面から突き出るように設けられ、回転防止部14gが落下防止部14fの円形貫通孔の内径部に設けられた凹部14h(図5)に係合することで、支柱14bの平板14dに対する回転が防止される。
【0035】
図4,図6のように、浮体部15は、内部にエアが充填された浮き輪状に構成され、浮体部15および収納部13aの上部で浮体部15とほぼ同径の支持円板16に固定されて支持される。支持円板16はその中心部で支柱14bに取り付けられている。カメラ部13の収納部13aは浮体部15の内径空間15aに位置し、円形状の浮体部15の中心にカメラ13bが位置するようになっている。
【0036】
カメラ部13は、収納部13aと浮体部15とが支持円板16で一体化され、支柱14bにより支持されて、据え付け対象の構造物である受梁Bの円筒状の開口部B1に挿入され、開口部B1の直下に位置するようになっている。このとき、支柱14bで支持されるカメラ部13のカメラ13bは開口部B1の中心軸上に位置し、カメラ13bが撮影する画像は、開口部B1のほぼ中心から見た画像となるので、モニタ画面の中心に目標物の基礎杭P1の画像が位置すれば、開口部B1の中心軸と基礎杭P1の中心軸とがほぼ一致したと判断することができる。
【0037】
また、カメラ13bおよびライト13cのための電源ケーブルおよび信号線17が支柱14bの円筒管内に延びており、信号線17は、図3(a)のように、通信機41に接続される。カメラ13bは信号線17等を介して遠隔操作可能になっている。
【0038】
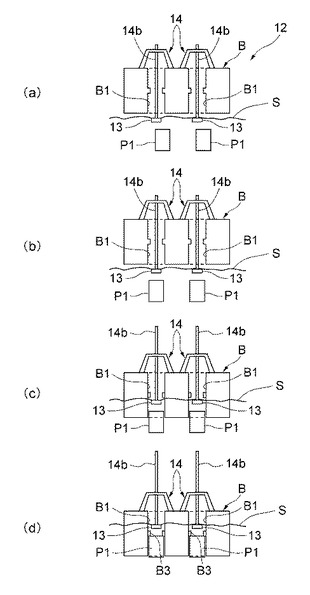
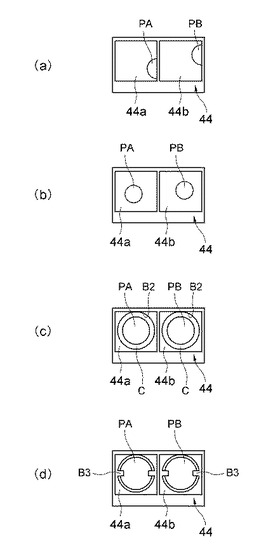
上述の画像情報取得装置12により取得するモニタ画像について図7,図8を参照して説明する。図7は、据え付け対象の構造物(受梁)の開口部と目標物である基礎杭との相対位置関係を示す図で、ずれた位置(a)、一致した据付位置(b)、開口部に基礎杭が入った位置(c)、および、据え付けが完了した位置(d)をそれぞれ示す。図8は、図3(b)のモニタ44に表示されるモニタ画像を概略的に示す図で、図7(a)〜(d)の位置関係と対応するモニタ画像(a)〜(d)をそれぞれ示す。
【0039】
図7(a)のように、受梁Bの開口部B1,B1に対し画像情報取得装置12の支持部14,14およびカメラ部13,13をそれぞれ設置する。すなわち、図4の固定部14aを受梁B上に設置し、固定部14aで支持された支柱14bを開口部B1へ挿入し、支柱14bの先端のカメラ部13が浮体部15により水面Sに浮く。なお、図では、説明の便宜上、画像情報取得装置12の支持部14,14およびカメラ部13,13をそれぞれ設置した2つの開口部B1,B1は隣接しているが、図1の複数の開口部B1のうちの例えば両端の開口部B1,B1に画像情報取得装置12の支持部14,14およびカメラ部13,13を設置することが好ましい。
【0040】
図7(a)の画像情報取得装置12のカメラ部13,13で撮影した各画像情報は、図3(a)、(b)のように、通信機41,42等を通して送受信され、図1の起重機船SHのクレーン操作室PEに設置されたパソコン43に入力し、モニタ44に画像が表示される。
【0041】
すなわち、図7(a)のカメラ部13,13が水中の各基礎杭P1,P1の杭頭を撮影し、図8(a)のように、モニタ44には、2つの画面44a,44bに各基礎杭の杭頭の画像PA,PBが表示される。図7(a)では、受梁Bの開口部B1が基礎杭P1に対しずれた位置にあるため、図8(a)のように、モニタ44の画面44a,44bにおいて各基礎杭の杭頭の画像PA,PBはずれて表示される。
【0042】
次に、図1のクレーン操作室PEでは、図3(b)、図8(a)のモニタ44でモニタリングしながら、受梁Bの位置を微調整し、受梁Bを基礎杭P1へと誘導する。その結果、図7(b)のように、開口部B1と基礎杭P1との各位置が一致し、受梁Bが据付位置に達すると、図8(b)のように、モニタ44の画面44a,44bのほぼ中心に各基礎杭の杭頭の画像PA,PBが表示される。これにより、クレーン操作室PEにおいて受梁Bの位置が基礎杭P1の位置と一致して据付位置に至ったことを確認できる。
【0043】
次に、図1のクレーン操作室PEでの操作により、受梁Bを降下させることで、図7(c)のように、開口部B1に基礎杭P1が入り込み、受梁Bが水面Sに近づき、水面Sが受梁Bの開口部B1内へと上昇するが、このとき、カメラ部13は、浮体部15による浮力で水面Sに浮いたまま追随して上昇することで、開口部B1内に位置するようになって、基礎杭P1の杭頭とともに開口部B1の内周面を撮影する。このときのモニタ44の画面44a,44bには、図8(c)のように、各基礎杭P1の杭頭の画像PA,PBとともに開口部B1の内周面の画像B2が表示される。
【0044】
クレーン操作室PEでは、図8(c)の各基礎杭P1の杭頭の画像PA,PBおよび開口部B1の内周面の画像B2をモニタリングしながら、開口部B1と基礎杭P1との間の隙間C(上面から見た)を目視し確認できる。
【0045】
図1のクレーン操作室PEで、図8(c)のようにモニタ44上で開口部B1と基礎杭P1との間の隙間Cがほぼ一定で、基礎杭P1が開口部B1内にほぼ中心にあること確認してから、図7(d)のように、受梁Bをさらに降下させて基礎杭P1の杭頭を開口部B1の内周面の当接部B3に当接させる。このとき、受梁Bはさらに水面Sに近づき、カメラ部13は当接部B3を超えて上方に移動し、モニタ44には、各基礎杭P1の杭頭の画像PA,PBと当接部B3の画像、および、開口部B1の内周面の画像B2が表示される。
【0046】
上述のようにして、受梁Bを基礎杭P1に対し沈設させて、基礎杭P1に据え付けることができる。この後、画像情報取得装置12の支持部14やカメラ部13等を回収し、次の受梁の据え付けに用いることができる。
【0047】
本実施形態の画像情報取得装置12によれば、起重機船SHのクレーンCRにより据え付け対象の構造物である受梁Bを目標物の基礎杭P1に据え付ける際に、基礎杭P1が水中に没している場合でも、カメラ部13を防水構造としているので、基礎杭P1をモニタ44に表示でき、さらに、受梁Bの据え付けの進行とともに受梁Bの開口部B1をもモニタ44に表示できるので、開口部B1と基礎杭P1との両位置をリアルタイムに目視し確認できる。このため、図1の起重機船SHのクレーン操作室PEにおいて基礎杭P1に対する開口部B1の最終的な位置合わせ操作を確実に精度よく行うことができる。
【0048】
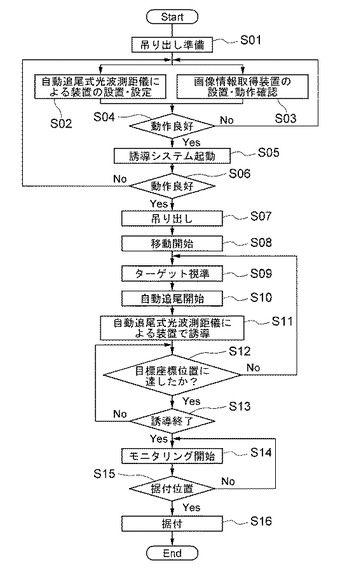
次に、本実施形態の構造物据付誘導システム10による図1の受梁の据え付け操作全体の工程S01〜S16について図9のフローチャートを参照して説明する。
【0049】
図1の起重機船SHによる据え付け対象である受梁Bの吊り出し準備をする(S01)。すなわち、図1,図2(a)〜(c)のように、受梁Bの所定位置に視準対象のターゲットとなる自動追尾式光波測距儀用ミラー21,31を取り付け、既設構造部の上部工U上に自動追尾式光波測距儀22,32を設置する等して、自動追尾式光波測距儀による誘導装置11を設置し各種設定を行う(S02)。他方、画像情報取得装置12を、上述の図7(a)のように、受梁Bの開口部B1に設置し、モニタ44の動作を確認する(S03)。自動追尾式光波測距儀による誘導装置11、および、画像情報取得装置12の各動作が良好であるか否かを確認する(S04)。
【0050】
次に、構造物据付誘導システム10を起動させ(S05)、上述の自動追尾式光波測距儀による誘導装置11、および、画像情報取得装置12を動作させ、各動作が良好であるか否かを確認する(S06)。
【0051】
次に、各装置11,12の各動作が良好であれば、図1の起重機船SHのクレーンCRにより受梁Bを吊り出し(S07)、起重機船SHによる受梁Bの据え付け移動を開始する(S08)。そして、自動追尾式光波測距儀22,32によりミラー21,31をターゲットとして視準し(S09)、クレーンCRに吊り下げられた受梁Bの自動追尾を開始する(S10)。
【0052】
自動追尾式光波測距儀22,32で得られた受梁Bの座標位置情報に基づいて受梁Bの目標物までの移動量情報(目標方位を含む)をモニタ30に表示し、かかるモニタ表示を目視してクレーン操作室PEで起重機船SHを操作する。このようにして、自動追尾式光波測距儀による誘導装置11により、起重機船SHのクレーンCRに吊り下げられた受梁Bを目標物の基礎杭P1へと誘導する(S11)。
【0053】
上記誘導を、上述のように、自動追尾式光波測距儀22,32が受梁Bのミラー21,31をターゲットとして視準し捕捉して得た座標位置情報に基づいて行い、受梁Bが目標座標位置に達するまで捕捉状態を続ける(S12)。
【0054】
受梁Bが目標座標位置に達した時点で、自動追尾式光波測距儀による誘導装置11を用いた誘導が終了したと判断し(S13)、この誘導が終了すると、クレーン操作室PEでは、画像情報取得装置12によるモニタリングを開始する(S14)。すなわち、図8(a)のように画像情報取得装置12のモニタ44にカメラ部13によって取得した基礎杭P1,P1の杭頭の画像PA,PBを表示し、次に、クレーン操作室PEで図8(b)のように画像PA,PBが画面の中心位置になるまで受梁Bの開口部B1の据付位置を微調整する(S15)。
【0055】
基礎杭P1に対する受梁Bの開口部B1の据付位置が図7(b)のように画面の中心であると確認したら、図7(c)(d)、図8(c)(d)のようにして、受梁Bを基礎杭P1に据え付ける(S16)。
【0056】
以上のように、本実施形態の構造物据付誘導システム10によれば、据え付け対象の構造物の受梁Bを起重機船SHのクレーンCRにより移動させるとき、自動追尾式光波測距儀による誘導装置11で受梁Bを基礎杭P1へと大まかに誘導してから、基礎杭P1に対する受梁Bの開口部B1の最終的な位置合わせのための微調整を、画像情報取得装置12により取得した画像をモニタ44でリアルタイムに目視し確認しながら行うことができる。このため、受梁Bの基礎杭P1への据え付け施工を確実に精度よくかつ効率よく行うことができる。
【0057】
また、目標物である基礎杭P1が水中に没している場合でも、画像情報取得装置12のカメラ部13により水中の基礎杭P1の杭頭の画像を取得できるので、基礎杭P1が水没している場合にも据え付け対象である受梁Bを基礎杭P1に確実に精度よく据え付けることができる。したがって、例えば、干満差により基礎杭等の目標物が水没している場合でも、据え付け工事を行うことができ、干満差の大きい地域でも施工期間が限られてしまうことはないので、据え付け施工を効率的に行うことができる。
【0058】
従来、起重機船のクレーン操作室からでは据え付け対象の構造物と目標物の基礎杭との位置関係が明確でないため、光波測距儀による測量を行い、測量結果を無線機で通話連絡し、その誘導を頼りに据え付けを行っていたため、据え付けの微調整が困難であり、時間もかかり、また、人的誘導において測量や伝達等の誤りに起因する据え付け対象の構造物と目標物との接触による損傷を回避するために確認作業に手間取る等の問題があったのに対し、本実施形態の構造物据付誘導システム10によれば、人的な通話連絡は不要で、リアルタイムに目視し確認しながら据え付け操作を行うことができるので、効率よくしかも安全にかつ確実に据え付け対象の構造物を基礎杭に据え付けることができる。
【0059】
また、自動追尾式光波測距儀による誘導装置11のみであると、基礎杭P1に対する受梁Bの開口部B1の最終的な位置合わせの確認が手間取るとともに、実際の画像による目視確認ができないのに対し、本実施形態の構造物据付誘導システム10によれば、基礎杭の実際の画像による目視確認が可能であり、確認作業が簡単で、精度よくかつ効率よく行うことができる。
【0060】
また、本実施形態の画像情報取得装置12によれば、カメラ部13は、収納部13aの底面が光透過性に構成されているので、目標物の基礎杭が水面から上にあらわれて空中にある場合にも、基礎杭の杭頭の画像を取得することができる。このように、画像情報取得装置12は水陸両用となっている。また、ライト13cで目標物を照明できるので、夜間の工事にも対応できる。
【0061】
以上のように本発明を実施するための形態について説明したが、本発明はこれらに限定されるものではなく、本発明の技術的思想の範囲内で各種の変形が可能である。例えば、本実施形態では、水没した基礎杭を目標物としたが、本発明は、これに限定されず、例えば、目標物としての水中構造物に対し別の構造物を据え付ける場合などにも適用できる。
【0062】
また、カメラ部13のカメラ13bとして水中で使用可能な水中カメラを用いてもよく、この場合には、収納部13aの省略が可能である。
【産業上の利用可能性】
【0063】
本発明の画像情報取得装置によれば、据え付け対象である構造物を基礎杭等の目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができるとともに、本発明の構造物据付誘導システムによれば、目標物が水没している場合にも構造物を確実に精度よく目標物に据え付けることができるので、干満差などにより目標物が水没している場合でも、構造物の据え付け工事を行うことができ、干満差の大きい地域でも施工期間が限られてしまうことはなく、据え付け施工を効率的に行うことができる。
【符号の説明】
【0064】
10 構造物据付誘導システム
11 自動追尾式光波測距儀による誘導装置
12 画像情報取得装置
13 カメラ部
13a 収納部
13b カメラ
13c ライト(照明部)
14 支持部
14a 固定部
14b 支柱
15 浮体部
21,31 自動追尾式光波測距儀用ミラー、ミラー
22,32 自動追尾式光波測距儀
29 パソコン
30 モニタ
43 パソコン
44 モニタ
B 受梁
B1 開口部
B2 開口部B1の内周面の画像
P,P1 基礎杭
PA,PB 基礎杭の画像
SH 起重機船
CR クレーン
PE クレーン操作室
S 水面
【技術分野】
【0001】
本発明は、据え付け対象である構造物と基礎杭などの目標物との相対位置を目視して把握可能な画像情報取得装置およびこの装置を用いた構造物据付誘導システムに関する。
【背景技術】
【0002】
水上構造物の構築の際には、従来、陸上部の2方向(法線、法線直角)から光波測距儀を使用し、据え付け対象物の位置を測量し、無線機で目標物である基礎杭までの誘導を行い、据え付け対象物を基礎杭に据え付けていた。また、水上構造物の構築のために水底に打設された基礎杭に据え付け対象物であるジャケットのレグを差し込む工法が公知である。この差し込み施工の際、非特許文献1のように、ジャケットレグの基礎杭への差し込みを効率的に精度よく行うために、ジャケットレグ内に配置したカメラによりモニタリングしてジャケットレグと基礎杭との相対位置を把握し、GPSを用いてジャケットを基礎杭に対して誘導し、位置調整を行いながらジャケットレグを基礎杭へ差し込んでいる。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】「D滑走路建設工事におけるジャケット式桟橋の海上施工について」(http://www.haneda-d.jp/pdf/tec05_3.pdf)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、レグ内カメラによりレグと基礎杭との平面相対位置の把握が可能であるのは、基礎杭が水面から突き出ているときであり、例えば、干満差により、基礎杭が水没している場合には把握できないので、干満差の大きい地域では施工期間が限られてしまうという問題があった。また、レグ内カメラによる夜間における把握も不可能であった。
【0005】
本発明は、上述のような従来技術の問題に鑑み、据え付け対象である構造物を基礎杭等の目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認可能な画像情報取得装置および構造物を確実に精度よく目標物に据え付けることができる構造物据付誘導システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための構造物据付のための画像情報取得装置は、据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得する構造物据付のための画像情報取得装置であって、空中、水面または水中で画像取得可能なカメラ部と、前記構造物に設置されて前記カメラ部を支持する支持部と、前記カメラ部を水面に浮上させる浮体部と、を備え、前記カメラ部が前記浮体部により水面で浮上することで前記目標物が水中にある場合でも前記カメラ部が前記目標物の画像を取得することを特徴とする。
【0007】
この構造物据付のための画像情報取得装置によれば、カメラ部が浮体部により水面で浮上することで目標物が水面または水中にある場合でもカメラ部が目標物の画像を取得することができるので、据え付け対象である構造物を目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができる。
【0008】
上記画像情報取得装置において前記カメラ部は、底面が光透過性である収納部を備えるか、または、水中撮影が可能な水中カメラから構成されることが好ましい。
【0009】
また、前記カメラ部の近傍に照明部を設けることで、夜間等のため水中の目標物の画像が把握しにくい場合にも対応可能である。
【0010】
また、前記構造物が水面側に移動したとき、前記カメラ部が前記浮体部により移動して水面に対する相対位置を一定に保つように前記支持部が前記カメラ部を支持することにより、構造物が据え付けの進行とともに水面近くへ移動したとき、カメラ部はそれに追随して水面に対する相対位置を保つので、目標物の画像の取得を続けることができるとともに、カメラ部が構造物側の画像をも撮影して取得できる。
【0011】
また、前記目標物が水底地盤に打設された杭で、前記構造物の据付部が前記杭に挿入される開口部である場合、前記カメラ部は、そのカメラが前記開口部の中心軸に位置するように前記支持部に支持されることにより、目標物の画像の位置から目標物と開口部との相対位置を把握することができる。
【0012】
上記目的を達成するための構造物据付誘導システムは、上記構造物据付のための画像情報取得装置と、前記画像情報取得装置で取得した画像情報の通信手段と、前記通信手段により送られた前記画像情報取得装置による画像情報をモニタ表示するモニタ装置と、を備え、据え付け対象の構造物の据付部の目標となる目標物の画像を前記モニタ装置に表示することを特徴とする。
【0013】
この構造物据付誘導システムによれば、据え付け対象である構造物の据付部の目標となる目標物の画像をモニタ装置に表示できるので、かかる画像を目視し確認しながら据え付け対象の構造物の据え付けのための移動操作を行うことができる。このとき、目標物が水中にある場合でも目標物の画像を取得することができるので、目標物が水没している場合にも据え付け対象である構造物を基礎杭等の目標物に確実に精度よく据え付けることができる。
【0014】
上記構造物据付誘導システムにおいて前記据え付け対象の構造物の据え付けの進行とともに前記構造物の据付部の画像をも前記モニタ装置に表示することが好ましい。
【0015】
また、前記据え付け対象の構造物の位置情報を取得する光波測距儀による誘導装置をさらに備え、前記位置情報に基づいて前記構造物を前記目標物に向けて誘導することにより、目標物の画像をモニタ装置に表示可能となる前の段階において、据え付け対象である構造物を目標物に向けて誘導することができる。
【発明の効果】
【0016】
本発明の画像情報取得装置によれば、据え付け対象である構造物を目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができる。
【0017】
また、本発明の構造物据付誘導システムによれば、目標物が水没している場合にも構造物を確実に精度よく目標物に据え付けることができる。
【図面の簡単な説明】
【0018】
【図1】本実施形態による構造物据付誘導システムの全体を概略的に示す図である。
【図2】図1の自動追尾式光波測距儀による誘導装置11の概略構成を示す図で、受梁上に設置される自動追尾式光波測距儀用ミラー(a)、既設構造部上に設置される自動追尾式光波測距儀等(b)、および、起重機船のクレーン操作室に設置されるパソコン等(c)を示す。
【図3】図1の受梁上に設置される画像情報取得装置の概略構成を示す図(a)、および、画像情報取得装置からの画像情報を表示するために起重機船のクレーン操作室に設置されるパソコン、モニタ等を示す図(b)である。
【図4】図1,図3の画像情報取得装置を示す側面図である。
【図5】図4の画像情報取得装置の上面図である。
【図6】図4の画像情報取得装置の底面図である。
【図7】本実施形態における据え付け対象の構造物(受梁)の開口部と目標物である基礎杭との相対位置関係を示す図で、ずれた位置(a)、一致した据付位置(b)、開口部に基礎杭が入った位置(c)、および、据え付けが完了した位置(d)をそれぞれ示す。
【図8】図3(b)のモニタ44に表示されるモニタ画像を概略的に示す図で、図7(a)〜(d)の位置関係と対応するモニタ画像(a)〜(d)をそれぞれ示す。
【図9】本実施形態の構造物据付誘導システム10による図1の受梁の据え付け操作全体の工程S01〜S16を説明するためのフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための形態について図面を用いて説明する。図1は本実施形態による構造物据付誘導システムの全体を概略的に示す図である。
【0020】
図1に示すように、構造物据付誘導システム10は、水底地盤に多数本打設された基礎杭Pに対し、水上構造物構築のためのジャケットを構成するRC製の受梁Bを、起重機船SHのクレーンCRの操作により基礎杭Pへ設置する際に誘導し、受梁Bの基礎杭Pに対する位置合わせを目視し確認できるように構成したものである。
【0021】
構造物据付誘導システム10は、自動追尾式光波測距儀による誘導装置11と、カメラによる画像情報取得装置12と、を備える。図1の起重機船SHのクレーン操作室PEでは、構造物据付誘導システム10の自動追尾式光波測距儀による誘導装置11からの位置情報に基づいて受梁Bを設置目標の基礎杭P1へと向けて移動させるとともに、カメラによる画像情報取得装置12からの画像情報に基づいて受梁Bの円筒状の開口部B1と基礎杭P1との最終的な位置合わせを目視し確認しながら行うことができる。
【0022】
図2は、自動追尾式光波測距儀による誘導装置11の概略構成を示す図で、受梁上に設置される自動追尾式光波測距儀用ミラー(a)、既設構造部上に設置される自動追尾式光波測距儀等(b)、および、起重機船のクレーン操作室に設置されるパソコン等(c)を示す。
【0023】
自動追尾式光波測距儀による誘導装置11は、次のように構成され、図1のように、2つの自動追尾式光波測距儀による測定チャンネルCH1,CH2を有する。すなわち、図2(a)の自動追尾式光波測距儀用ミラー21,31を据え付け対象の受梁Bの各所定位置にそれぞれ設け、図2(b)の既設構造部の上部工U上に自動追尾式光波測距儀22,32,特定省電力無線装置23,33,および、送信アンテナ24,34を設置し、起重機船SHのクレーン操作室PEに、受信アンテナ25,35,特定省電力無線受信機26,36,および、パソコン(PC)29,および、モニタ30を設置する。
【0024】
自動追尾式光波測距儀22,32は受梁Bのミラー21,31をターゲットにして視準し、その測定データを、送信機23,33,送信アンテナ24,34により無線伝送し、受信アンテナ25,35,受信機26,36により受信するようにして測定チャンネルCH1,CH2により送受信することで、パソコン29に入力する。パソコン29では、測定データから受梁Bの座標位置情報を算出し、受梁Bの座標位置情報に基づいて解析を行い、受梁Bの目標物への移動量情報を算出し、受梁Bの現在の座標位置情報、現在方位および傾斜角など、ならびに、受梁Bの移動量情報および目標方位などをモニタ30に表示する。これにより、起重機船SHのクレーン操作室PEでは、受梁Bの現在の位置や必要な移動量や目標方位をモニタ30でリアルタイムに目視し確認できる。
【0025】
なお、自動追尾式光波測距儀22,32は、自動追尾式トータルステーションともよばれ、自動追尾式光波測距儀用ミラー21,31をターゲットとして自動視準および自動追尾を行うもので、市販のものを使用できる。
【0026】
図3は、受梁上に設置される画像情報取得装置の概略構成を示す図(a)、および、画像情報取得装置からの画像情報を表示するために起重機船のクレーン操作室に設置されるパソコン、モニタ等を示す図(b)である。
【0027】
画像情報取得装置12は、図3(a)のように、据え付け対象の受梁Bの開口部B1の下方に設置されるカメラ部13と、通信機41,42と、パソコン43と、モニタ44と、を備える。カメラ部13は、目標物の基礎杭の画像情報を取得する。
【0028】
画像情報取得装置12は、図3(a)、(b)のように、カメラ部13で取得した画像情報を通信機41により無線で送信し、図1の起重機船のクレーン操作室に設置された通信機42で受信しパソコン(PC)43に送り、モニタ44に表示する。また、パソコン43側から通信機42、41を通して操作情報を送信し、カメラ部13を操作することができる。通信機41,42は無線LAN機器から構成できる。
【0029】
次に、図4〜図6を参照して画像情報取得装置12について説明する。図4は画像情報取得装置を示す側面図である。図5は図4の画像情報取得装置の上面図、図6は底面図である。
【0030】
図4〜図6のように、画像情報取得装置12は、さらに、据え付け対象の構造物に設置されてカメラ部13を支持する支持部14と、カメラ部13を水面で浮上させる浮体部15と、を備える。カメラ部13は、CCD撮像素子やレンズ等から構成されるカメラ13bと、ライト13cと、カメラ13bおよびライト13cを収納し密閉された箱状の収納部13aと、を有し、収納部13aが浮体部15と一体になって水面に浮上するようになっている。
【0031】
収納部13aは、底面がアクリル板などから光透過性に構成されるとともに全体が密閉され防水構造となっている。収納部13aに収納したカメラ13bにより水中の基礎杭などの目標物の画像撮影が可能であり、また、この画像撮影のときライト13cにより水中の基礎杭などの目標物を照明することができる。
【0032】
支持部14は、据え付け対象の構造物上に櫓状に設置される固定部14aと、固定部14aに支持されて、下端でカメラ部13を支持する円筒管からなる支柱14bと、を有する。
【0033】
図4,図5のように、固定部14aは、平面的に等間隔に並べられた複数の脚14cと、脚14cの上に載る平板14dと、を有する。円筒管からなる支柱14bは、平板14dの中央に設けられた貫通孔14e(図4の破線で示す)を上下動できるように緩やかに貫通している。支柱14bの所定位置の周囲に支柱14bよりも大径の円盤状の落下防止部14fが設けられて固定されている。支柱14bは、図4の位置で落下防止部14fにより支持され、その位置に保持されるが、カメラ部13が浮体部15により浮き上がると、それに追随して上側に移動する。
【0034】
また、円筒管からなる支柱14bには長手方向に延びる回転防止部14gが支柱14bの外周面から突き出るように設けられ、回転防止部14gが落下防止部14fの円形貫通孔の内径部に設けられた凹部14h(図5)に係合することで、支柱14bの平板14dに対する回転が防止される。
【0035】
図4,図6のように、浮体部15は、内部にエアが充填された浮き輪状に構成され、浮体部15および収納部13aの上部で浮体部15とほぼ同径の支持円板16に固定されて支持される。支持円板16はその中心部で支柱14bに取り付けられている。カメラ部13の収納部13aは浮体部15の内径空間15aに位置し、円形状の浮体部15の中心にカメラ13bが位置するようになっている。
【0036】
カメラ部13は、収納部13aと浮体部15とが支持円板16で一体化され、支柱14bにより支持されて、据え付け対象の構造物である受梁Bの円筒状の開口部B1に挿入され、開口部B1の直下に位置するようになっている。このとき、支柱14bで支持されるカメラ部13のカメラ13bは開口部B1の中心軸上に位置し、カメラ13bが撮影する画像は、開口部B1のほぼ中心から見た画像となるので、モニタ画面の中心に目標物の基礎杭P1の画像が位置すれば、開口部B1の中心軸と基礎杭P1の中心軸とがほぼ一致したと判断することができる。
【0037】
また、カメラ13bおよびライト13cのための電源ケーブルおよび信号線17が支柱14bの円筒管内に延びており、信号線17は、図3(a)のように、通信機41に接続される。カメラ13bは信号線17等を介して遠隔操作可能になっている。
【0038】
上述の画像情報取得装置12により取得するモニタ画像について図7,図8を参照して説明する。図7は、据え付け対象の構造物(受梁)の開口部と目標物である基礎杭との相対位置関係を示す図で、ずれた位置(a)、一致した据付位置(b)、開口部に基礎杭が入った位置(c)、および、据え付けが完了した位置(d)をそれぞれ示す。図8は、図3(b)のモニタ44に表示されるモニタ画像を概略的に示す図で、図7(a)〜(d)の位置関係と対応するモニタ画像(a)〜(d)をそれぞれ示す。
【0039】
図7(a)のように、受梁Bの開口部B1,B1に対し画像情報取得装置12の支持部14,14およびカメラ部13,13をそれぞれ設置する。すなわち、図4の固定部14aを受梁B上に設置し、固定部14aで支持された支柱14bを開口部B1へ挿入し、支柱14bの先端のカメラ部13が浮体部15により水面Sに浮く。なお、図では、説明の便宜上、画像情報取得装置12の支持部14,14およびカメラ部13,13をそれぞれ設置した2つの開口部B1,B1は隣接しているが、図1の複数の開口部B1のうちの例えば両端の開口部B1,B1に画像情報取得装置12の支持部14,14およびカメラ部13,13を設置することが好ましい。
【0040】
図7(a)の画像情報取得装置12のカメラ部13,13で撮影した各画像情報は、図3(a)、(b)のように、通信機41,42等を通して送受信され、図1の起重機船SHのクレーン操作室PEに設置されたパソコン43に入力し、モニタ44に画像が表示される。
【0041】
すなわち、図7(a)のカメラ部13,13が水中の各基礎杭P1,P1の杭頭を撮影し、図8(a)のように、モニタ44には、2つの画面44a,44bに各基礎杭の杭頭の画像PA,PBが表示される。図7(a)では、受梁Bの開口部B1が基礎杭P1に対しずれた位置にあるため、図8(a)のように、モニタ44の画面44a,44bにおいて各基礎杭の杭頭の画像PA,PBはずれて表示される。
【0042】
次に、図1のクレーン操作室PEでは、図3(b)、図8(a)のモニタ44でモニタリングしながら、受梁Bの位置を微調整し、受梁Bを基礎杭P1へと誘導する。その結果、図7(b)のように、開口部B1と基礎杭P1との各位置が一致し、受梁Bが据付位置に達すると、図8(b)のように、モニタ44の画面44a,44bのほぼ中心に各基礎杭の杭頭の画像PA,PBが表示される。これにより、クレーン操作室PEにおいて受梁Bの位置が基礎杭P1の位置と一致して据付位置に至ったことを確認できる。
【0043】
次に、図1のクレーン操作室PEでの操作により、受梁Bを降下させることで、図7(c)のように、開口部B1に基礎杭P1が入り込み、受梁Bが水面Sに近づき、水面Sが受梁Bの開口部B1内へと上昇するが、このとき、カメラ部13は、浮体部15による浮力で水面Sに浮いたまま追随して上昇することで、開口部B1内に位置するようになって、基礎杭P1の杭頭とともに開口部B1の内周面を撮影する。このときのモニタ44の画面44a,44bには、図8(c)のように、各基礎杭P1の杭頭の画像PA,PBとともに開口部B1の内周面の画像B2が表示される。
【0044】
クレーン操作室PEでは、図8(c)の各基礎杭P1の杭頭の画像PA,PBおよび開口部B1の内周面の画像B2をモニタリングしながら、開口部B1と基礎杭P1との間の隙間C(上面から見た)を目視し確認できる。
【0045】
図1のクレーン操作室PEで、図8(c)のようにモニタ44上で開口部B1と基礎杭P1との間の隙間Cがほぼ一定で、基礎杭P1が開口部B1内にほぼ中心にあること確認してから、図7(d)のように、受梁Bをさらに降下させて基礎杭P1の杭頭を開口部B1の内周面の当接部B3に当接させる。このとき、受梁Bはさらに水面Sに近づき、カメラ部13は当接部B3を超えて上方に移動し、モニタ44には、各基礎杭P1の杭頭の画像PA,PBと当接部B3の画像、および、開口部B1の内周面の画像B2が表示される。
【0046】
上述のようにして、受梁Bを基礎杭P1に対し沈設させて、基礎杭P1に据え付けることができる。この後、画像情報取得装置12の支持部14やカメラ部13等を回収し、次の受梁の据え付けに用いることができる。
【0047】
本実施形態の画像情報取得装置12によれば、起重機船SHのクレーンCRにより据え付け対象の構造物である受梁Bを目標物の基礎杭P1に据え付ける際に、基礎杭P1が水中に没している場合でも、カメラ部13を防水構造としているので、基礎杭P1をモニタ44に表示でき、さらに、受梁Bの据え付けの進行とともに受梁Bの開口部B1をもモニタ44に表示できるので、開口部B1と基礎杭P1との両位置をリアルタイムに目視し確認できる。このため、図1の起重機船SHのクレーン操作室PEにおいて基礎杭P1に対する開口部B1の最終的な位置合わせ操作を確実に精度よく行うことができる。
【0048】
次に、本実施形態の構造物据付誘導システム10による図1の受梁の据え付け操作全体の工程S01〜S16について図9のフローチャートを参照して説明する。
【0049】
図1の起重機船SHによる据え付け対象である受梁Bの吊り出し準備をする(S01)。すなわち、図1,図2(a)〜(c)のように、受梁Bの所定位置に視準対象のターゲットとなる自動追尾式光波測距儀用ミラー21,31を取り付け、既設構造部の上部工U上に自動追尾式光波測距儀22,32を設置する等して、自動追尾式光波測距儀による誘導装置11を設置し各種設定を行う(S02)。他方、画像情報取得装置12を、上述の図7(a)のように、受梁Bの開口部B1に設置し、モニタ44の動作を確認する(S03)。自動追尾式光波測距儀による誘導装置11、および、画像情報取得装置12の各動作が良好であるか否かを確認する(S04)。
【0050】
次に、構造物据付誘導システム10を起動させ(S05)、上述の自動追尾式光波測距儀による誘導装置11、および、画像情報取得装置12を動作させ、各動作が良好であるか否かを確認する(S06)。
【0051】
次に、各装置11,12の各動作が良好であれば、図1の起重機船SHのクレーンCRにより受梁Bを吊り出し(S07)、起重機船SHによる受梁Bの据え付け移動を開始する(S08)。そして、自動追尾式光波測距儀22,32によりミラー21,31をターゲットとして視準し(S09)、クレーンCRに吊り下げられた受梁Bの自動追尾を開始する(S10)。
【0052】
自動追尾式光波測距儀22,32で得られた受梁Bの座標位置情報に基づいて受梁Bの目標物までの移動量情報(目標方位を含む)をモニタ30に表示し、かかるモニタ表示を目視してクレーン操作室PEで起重機船SHを操作する。このようにして、自動追尾式光波測距儀による誘導装置11により、起重機船SHのクレーンCRに吊り下げられた受梁Bを目標物の基礎杭P1へと誘導する(S11)。
【0053】
上記誘導を、上述のように、自動追尾式光波測距儀22,32が受梁Bのミラー21,31をターゲットとして視準し捕捉して得た座標位置情報に基づいて行い、受梁Bが目標座標位置に達するまで捕捉状態を続ける(S12)。
【0054】
受梁Bが目標座標位置に達した時点で、自動追尾式光波測距儀による誘導装置11を用いた誘導が終了したと判断し(S13)、この誘導が終了すると、クレーン操作室PEでは、画像情報取得装置12によるモニタリングを開始する(S14)。すなわち、図8(a)のように画像情報取得装置12のモニタ44にカメラ部13によって取得した基礎杭P1,P1の杭頭の画像PA,PBを表示し、次に、クレーン操作室PEで図8(b)のように画像PA,PBが画面の中心位置になるまで受梁Bの開口部B1の据付位置を微調整する(S15)。
【0055】
基礎杭P1に対する受梁Bの開口部B1の据付位置が図7(b)のように画面の中心であると確認したら、図7(c)(d)、図8(c)(d)のようにして、受梁Bを基礎杭P1に据え付ける(S16)。
【0056】
以上のように、本実施形態の構造物据付誘導システム10によれば、据え付け対象の構造物の受梁Bを起重機船SHのクレーンCRにより移動させるとき、自動追尾式光波測距儀による誘導装置11で受梁Bを基礎杭P1へと大まかに誘導してから、基礎杭P1に対する受梁Bの開口部B1の最終的な位置合わせのための微調整を、画像情報取得装置12により取得した画像をモニタ44でリアルタイムに目視し確認しながら行うことができる。このため、受梁Bの基礎杭P1への据え付け施工を確実に精度よくかつ効率よく行うことができる。
【0057】
また、目標物である基礎杭P1が水中に没している場合でも、画像情報取得装置12のカメラ部13により水中の基礎杭P1の杭頭の画像を取得できるので、基礎杭P1が水没している場合にも据え付け対象である受梁Bを基礎杭P1に確実に精度よく据え付けることができる。したがって、例えば、干満差により基礎杭等の目標物が水没している場合でも、据え付け工事を行うことができ、干満差の大きい地域でも施工期間が限られてしまうことはないので、据え付け施工を効率的に行うことができる。
【0058】
従来、起重機船のクレーン操作室からでは据え付け対象の構造物と目標物の基礎杭との位置関係が明確でないため、光波測距儀による測量を行い、測量結果を無線機で通話連絡し、その誘導を頼りに据え付けを行っていたため、据え付けの微調整が困難であり、時間もかかり、また、人的誘導において測量や伝達等の誤りに起因する据え付け対象の構造物と目標物との接触による損傷を回避するために確認作業に手間取る等の問題があったのに対し、本実施形態の構造物据付誘導システム10によれば、人的な通話連絡は不要で、リアルタイムに目視し確認しながら据え付け操作を行うことができるので、効率よくしかも安全にかつ確実に据え付け対象の構造物を基礎杭に据え付けることができる。
【0059】
また、自動追尾式光波測距儀による誘導装置11のみであると、基礎杭P1に対する受梁Bの開口部B1の最終的な位置合わせの確認が手間取るとともに、実際の画像による目視確認ができないのに対し、本実施形態の構造物据付誘導システム10によれば、基礎杭の実際の画像による目視確認が可能であり、確認作業が簡単で、精度よくかつ効率よく行うことができる。
【0060】
また、本実施形態の画像情報取得装置12によれば、カメラ部13は、収納部13aの底面が光透過性に構成されているので、目標物の基礎杭が水面から上にあらわれて空中にある場合にも、基礎杭の杭頭の画像を取得することができる。このように、画像情報取得装置12は水陸両用となっている。また、ライト13cで目標物を照明できるので、夜間の工事にも対応できる。
【0061】
以上のように本発明を実施するための形態について説明したが、本発明はこれらに限定されるものではなく、本発明の技術的思想の範囲内で各種の変形が可能である。例えば、本実施形態では、水没した基礎杭を目標物としたが、本発明は、これに限定されず、例えば、目標物としての水中構造物に対し別の構造物を据え付ける場合などにも適用できる。
【0062】
また、カメラ部13のカメラ13bとして水中で使用可能な水中カメラを用いてもよく、この場合には、収納部13aの省略が可能である。
【産業上の利用可能性】
【0063】
本発明の画像情報取得装置によれば、据え付け対象である構造物を基礎杭等の目標物に据え付ける際に、目標物が水没している場合にも確実に構造物と目標物との相対位置を把握し確認することができるとともに、本発明の構造物据付誘導システムによれば、目標物が水没している場合にも構造物を確実に精度よく目標物に据え付けることができるので、干満差などにより目標物が水没している場合でも、構造物の据え付け工事を行うことができ、干満差の大きい地域でも施工期間が限られてしまうことはなく、据え付け施工を効率的に行うことができる。
【符号の説明】
【0064】
10 構造物据付誘導システム
11 自動追尾式光波測距儀による誘導装置
12 画像情報取得装置
13 カメラ部
13a 収納部
13b カメラ
13c ライト(照明部)
14 支持部
14a 固定部
14b 支柱
15 浮体部
21,31 自動追尾式光波測距儀用ミラー、ミラー
22,32 自動追尾式光波測距儀
29 パソコン
30 モニタ
43 パソコン
44 モニタ
B 受梁
B1 開口部
B2 開口部B1の内周面の画像
P,P1 基礎杭
PA,PB 基礎杭の画像
SH 起重機船
CR クレーン
PE クレーン操作室
S 水面
【特許請求の範囲】
【請求項1】
据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得する構造物据付のための画像情報取得装置であって、
空中、水面または水中で画像取得可能なカメラ部と、前記構造物に設置されて前記カメラ部を支持する支持部と、前記カメラ部を水面に浮上させる浮体部と、を備え、
前記カメラ部が前記浮体部により水面で浮上することで前記目標物が水中にある場合でも前記カメラ部が前記目標物の画像を取得することを特徴とする構造物据付のための画像情報取得装置。
【請求項2】
前記カメラ部は、底面が光透過性である収納部を備えるか、または、水中撮影が可能な水中カメラから構成される請求項1に記載の構造物据付のための画像情報取得装置。
【請求項3】
前記カメラ部の近傍に照明部を設けた請求項1または2に記載の構造物据付のための画像情報取得装置。
【請求項4】
前記構造物が水面側に移動したとき、前記カメラ部が前記浮体部により移動して水面に対する相対位置を一定に保つように前記支持部が前記カメラ部を支持する請求項1乃至3のいずれか1項に記載の構造物据付のための画像情報取得装置。
【請求項5】
前記目標物が水底地盤に打設された杭で、前記構造物の据付部が前記杭に挿入される開口部である場合、前記カメラ部は、そのカメラが前記開口部の中心軸に位置するように前記支持部に支持される請求項1乃至4のいずれか1項に記載の構造物据付のための画像情報取得装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の構造物据付のための画像情報取得装置と、
前記画像情報取得装置で取得した画像情報の通信手段と、
前記通信手段により送られた前記画像情報取得装置による画像情報をモニタ表示するモニタ装置と、を備え、
据え付け対象の構造物の据付部の目標となる目標物の画像を前記モニタ装置に表示することを特徴とする構造物据付誘導システム。
【請求項7】
前記据え付け対象の構造物の据え付けの進行とともに前記構造物の据付部の画像をも前記モニタ装置に表示することを特徴とする請求項6に記載の構造物据付誘導システム。
【請求項8】
前記据え付け対象の構造物の位置情報を取得する光波測距儀による誘導装置をさらに備え、前記位置情報に基づいて前記構造物を前記目標物に向けて誘導することを特徴とする請求項6または7に記載の構造物据付誘導システム。
【請求項1】
据え付け対象の構造物の据付部に設置されて据え付けの目標となる目標物の画像情報を取得する構造物据付のための画像情報取得装置であって、
空中、水面または水中で画像取得可能なカメラ部と、前記構造物に設置されて前記カメラ部を支持する支持部と、前記カメラ部を水面に浮上させる浮体部と、を備え、
前記カメラ部が前記浮体部により水面で浮上することで前記目標物が水中にある場合でも前記カメラ部が前記目標物の画像を取得することを特徴とする構造物据付のための画像情報取得装置。
【請求項2】
前記カメラ部は、底面が光透過性である収納部を備えるか、または、水中撮影が可能な水中カメラから構成される請求項1に記載の構造物据付のための画像情報取得装置。
【請求項3】
前記カメラ部の近傍に照明部を設けた請求項1または2に記載の構造物据付のための画像情報取得装置。
【請求項4】
前記構造物が水面側に移動したとき、前記カメラ部が前記浮体部により移動して水面に対する相対位置を一定に保つように前記支持部が前記カメラ部を支持する請求項1乃至3のいずれか1項に記載の構造物据付のための画像情報取得装置。
【請求項5】
前記目標物が水底地盤に打設された杭で、前記構造物の据付部が前記杭に挿入される開口部である場合、前記カメラ部は、そのカメラが前記開口部の中心軸に位置するように前記支持部に支持される請求項1乃至4のいずれか1項に記載の構造物据付のための画像情報取得装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の構造物据付のための画像情報取得装置と、
前記画像情報取得装置で取得した画像情報の通信手段と、
前記通信手段により送られた前記画像情報取得装置による画像情報をモニタ表示するモニタ装置と、を備え、
据え付け対象の構造物の据付部の目標となる目標物の画像を前記モニタ装置に表示することを特徴とする構造物据付誘導システム。
【請求項7】
前記据え付け対象の構造物の据え付けの進行とともに前記構造物の据付部の画像をも前記モニタ装置に表示することを特徴とする請求項6に記載の構造物据付誘導システム。
【請求項8】
前記据え付け対象の構造物の位置情報を取得する光波測距儀による誘導装置をさらに備え、前記位置情報に基づいて前記構造物を前記目標物に向けて誘導することを特徴とする請求項6または7に記載の構造物据付誘導システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−211488(P2012−211488A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−78239(P2011−78239)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000166627)五洋建設株式会社 (364)
【出願人】(393005794)ペンタテクノサービス株式会社 (1)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000166627)五洋建設株式会社 (364)
【出願人】(393005794)ペンタテクノサービス株式会社 (1)
【Fターム(参考)】
[ Back to top ]