
構造物調査装置及び構造物調査方法
【課題】少ない光源による照明装置を用いて、構造物の表面の欠陥に発生する陰影を確実に認知できるようにする。
【解決手段】
複数の光源121-124から、各光源による光線の主要な照明領域が重複しないよう撮影領域を照射して撮影し、補正データ取得手段103が、欠陥のない撮影領域の撮影結果から、明度のムラを補正する補正データを取得し、欠陥を調査すべき撮影領域の撮影結果を、補正データを用いて補正し、撮影結果の明度のムラを平準化し、撮影結果に含まれる欠陥の影が、明度のムラにまぎれることなく、はっきり認識できるようにする。
【解決手段】
複数の光源121-124から、各光源による光線の主要な照明領域が重複しないよう撮影領域を照射して撮影し、補正データ取得手段103が、欠陥のない撮影領域の撮影結果から、明度のムラを補正する補正データを取得し、欠陥を調査すべき撮影領域の撮影結果を、補正データを用いて補正し、撮影結果の明度のムラを平準化し、撮影結果に含まれる欠陥の影が、明度のムラにまぎれることなく、はっきり認識できるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
構造物の表面、特に、道路構造物の舗装面の欠陥を調査する装置に関するものである。
【背景技術】
【0002】
コンクリートやアスファルトを用いた構造物、特に、道路構造物の舗装面は、それ自体の劣化に加え、長年に渡る気象の変化や、地盤の変化、荷重負荷の影響により、その表面にひび割れが発生する。
このひび割れは、構造物の本格的な損壊、即ち、部分的な破壊や剥離の前兆であるため、調査によってひび割れを早期に発見し、補修することは、構造物の損壊を防止する上で非常に重要な作業となっている。
【0003】
従来、このようなひび割れの発見には、例えば、特願平9−96515号に開示されるひび割れ調査装置が使用される。
この従来のひび割れ調査装置は、車両に搭載したカメラにより路面を撮影し、撮影画像を解析することによって路面のひび割れを検出するものである。
【0004】
しかしながら、上記の従来技術では、路面の撮影は、太陽光(自然光)の下で行われるため、撮影時の季節、天候、時刻によって、ひび割れの映り方が変化して、ひび割れを検出できなくなる可能性があり、ひび割れの適正な検出ができない、という問題があった。
また、太陽光を利用するものであるため、検出作業が日中に限定され、走行車両が少ない夜間には作業ができない、という問題もあった。
【0005】
一方、上記と同様の調査装置で、太陽光に代えて照明装置を利用し、夜間にも路面の欠陥を検出する技術が提案されている。
このような従来の調査装置で用いられる照明装置は、撮影領域内の路面をはっきりと映し出すことが重要視されていた。
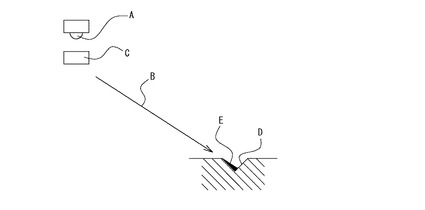
そこで、撮影領域における照度を所定レベル以上に均一に調整するために、従来の照明装置には、ハロゲンランプ等の高照度の光源Aを多数備え、光源からの光線Bをレンズを備えた集光手段Cによって、所定の照射領域に収束し得るものが利用されていた。
【0006】
しかしながら、光源A数が多いと、確認が困難なクラックやひび割れを始めとする欠陥Dがあるという問題があった。
例えば、従来の照明装置を利用した調査装置を搭載した車両を用いた場合、車両の進行方向に平行な方向に延びる欠陥Dには、図20に示したように、様々な角度から複数の光源Aの光線Bが差し込み、欠陥内に発生する陰影を打ち消してしまう。
【0007】
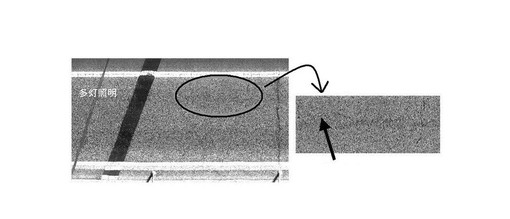
具体的には、このような多灯照明の下での撮影では、図21に示したように、欠陥の陰影を認めることができない。
即ち、この図21において、左側の画像の黒丸で囲んだ領域には、車両の進行方向、即ち、画像の左右方向に沿って、ヒビ状の欠陥が存在する。
図21の右側の画像は、左側の画像の黒丸で囲まれた領域の拡大画像であるが、この拡大画像には、欠陥を示すような陰影は認められない。
このように、上記の従来技術では、車両の進行方向に平行に延びる欠陥を発見することはできなかった。
【0008】
上記の陰影の打ち消しについては、光源数が少ない照明装置を使用すれば、防止することが可能である。
この場合、図22に示したように、車両の進行方向に平行な方向に延びる欠陥Dには、陰影Eが発生し、発生した陰影が他の光源の光線によって打ち消されることはない。
【0009】
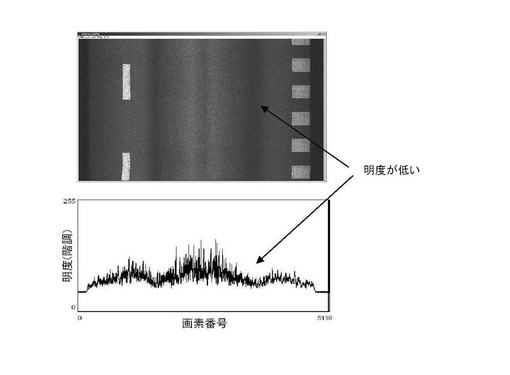
しかしながら、光源数を減らせば、今度は、図23に示したように、照明領域の照度ムラが激しくなり、陰影の確認自体が困難になって、撮影結果から欠陥を確認できなくなる、という問題があった。
なお、本明細書において、明度とは、撮影手段によって得られた撮影結果、即ち、画像又は映像における256階調の明るさの度合いを示し、照度とは、光源からの光の明るさ(例えばルクス)の度合いを示す。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−96515号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであって、映像や画像を解析することによって、構造物、特に、道路の舗装面に生じた欠陥を検出する際に、その欠陥がクラックやひび割れのような細かなもの、又は、比較的開口部が広く、深さが浅いものであっても、照明装置を用いて確実に検出し、構造物の状態を的確に調査できるようにする構造物調査装置及び構造物調査方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明の第1発明に係る構造物調査装置は、
撮影して得られた撮影結果に基づいた構造物の表面の欠陥の判断に用いられる構造物調査装置において、
構造物の表面の撮影領域を照射する複数の光源を有し、各光源による光線の主要な照射領域が重複しない複数の光源を有する照明手段と、
照明手段の光源によって照射された撮影領域を撮影して撮影結果を取得し、欠陥のない構造物の表面と、調査対象となる構造物の表面とを撮影する撮影手段と、
撮影手段によって得られた撮影結果のうち、欠陥のない構造物の表面の撮影結果から、撮影結果の明度のムラを補正する補正データを取得する補正データ取得手段と、
補正データ取得手段によって得られた補正データを用いて、撮影結果のうち、構造物の表面の調査対象領域を撮影して得られた撮影結果の明度のムラを平準化する撮影結果補正手段と
を具備することを特徴とする。
【0013】
また、第2発明に係る構造物調査装置は、第1発明において、
照明手段の各光源が、各光源から拡散する光線を、それぞれ所定の範囲に収束させる集光手段を有することを特徴とする。
【0014】
また、第3発明に係る構造物調査装置は、第2発明において、
照明手段の各光源の照射領域が、それぞれ、照射領域が重複しない主要照射領域と、隣接する照射領域との境界に形成され、隣接する照射領域と重複する境界照射領域とからなり、
照明手段の集光手段が、集光レンズと、遮光手段とからなり、
遮光手段は、境界照射領域に照射される光線を遮光し、境界照射領域に到達する光量を減少させる
ことを特徴とする。
【0015】
また、第4発明に係る構造物調査装置は、第1から第3発明の何れかにおいて、
補正データ取得手段が、
撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、得られた明度補正曲線を補正データとする
ことを特徴とする。
【0016】
また、第5発明に係る構造物調査装置は、第4発明において、
補正データ取得手段が、
明度補正曲線に基づいて補正率を算出し、得られた補正率を補正データとし、
撮影結果補正手段が、
補正データ取得手段によって得られた補正率を用いて撮影結果の明度のムラを平準化する
ことを特徴とする。
【0017】
また、第6発明に係る構造物調査装置は、第1から第5発明の何れかにおいて、
照明手段及び撮影手段に対し、構造物の表面が相対移動し、
照明手段の光源が、移動方向に直交する方向に沿って4組配置され、
各光源の照射領域の集合域が、撮影領域の中央に、移動方向に沿って設定される中央境界照射領域と、中央境界領域の両側に中央境界照射領域と所定間隙を介して設定される側境界照射領域とを境界に4分割され、
両端の2組の光源は、互いの光源の光軸が交差した後、中央境界領域から側境界領域に至る照射領域を照射するよう、それぞれ配置され、
中央の2組の光源は、各光源の光軸が、両端の光源のうち、隣り合う光源の光軸と交差した後、側境界領域の外側の照射領域を照射するよう、それぞれ配置される
ことを特徴とする。
【0018】
また、第7発明に係る構造物調査装置は、第1から第6発明の何れかにおいて、車両に取り付けられ、道路構造物の舗装面の欠陥を検出することを特徴とする。
【0019】
また、第8発明に係る構造物調査装置は、第1から第7発明のいずれかにおいて、
補正データ取得手段が、
欠陥のない構造物の表面の撮影結果を構成する画素の明度の変化をグラフ化し、そのグラフ化において、予め定められた画素ピッチで設定される変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定し、
明度変化点をスプライン補間したスプライン曲線を作成し、予め定められた設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正データとして画素毎に算出し、
撮影結果補正手段が、
撮影結果を構成する各画素の明度に、各画素に対応する補正データを掛けて撮影結果の明度ムラを平準化する
ことを特徴とする。
【0020】
上記目的を達成するため、本発明の第9発明に係る構造物調査方法は、
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面を撮影して撮影結果を取得するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、撮影結果の明度のムラを補正する補正データを取得するステップと、
光線が照射された構造物の表面の調査対象領域となる撮影領域を撮影して撮影結果を取得するステップと、
調査対象領域を撮影して得られた撮影結果の明度のムラを、補正データを用いて平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなることを特徴とする。
【0021】
上記目的を達成するため、本発明の第10発明に係る構造物調査方法は、
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面とみなし得る撮影領域を含む調査対象領域となる撮影領域を撮影するステップと、
撮影結果を格納するステップと、
撮影結果から、欠陥のない構造物の表面を撮影したとみなす撮影結果を特定するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正する補正データを取得するステップと、
補正データを用いて、格納されている撮影結果の明度のムラを平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなることを特徴とする。
【発明の効果】
【0022】
第1及び8発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影が明度のムラにまぎれることがなくなり、欠陥を確実に確認できるようになる。
【0023】
また、第2発明によれば、構造物の表面に到達する光線を平行光に近づけることができるようになり、撮影領域を太陽光下と同様の照明環境にすることができ、欠陥に生じる陰影を明瞭にすることが可能になる。
【0024】
また、第3発明によれば、境界照射領域に達する光線を遮光手段によって減光させることにより、各光源により形成される照射領域のエッジをぼかし、照射領域同士のつなぎ目を目立たなくすることができるため、構造物の表面の欠陥の検出精度を高めることができる。
【0025】
また、第4発明及び第5発明によれば、得られた撮影結果の明度ムラを効果的に補正し、明度を平準化することができるようになって、構造物の表面の欠陥の検出精度を高めることができる。
【0026】
また、第6発明によれば、構造物の表面の欠陥に対する光線の照射角度が斜めになり、かつ、各光源の照射領域の面積が同様になるので、陰影を効果的に発生させることができると共に、撮影領域の照度の極端なばらつきを抑制することができるようになる。
【0027】
また、第7発明によれば、道路構造物の舗装面の欠陥を、車両を走行させるだけで簡単に検出することができるようになる。
【0028】
また、第9及び第10発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影を確実に確認できるようになる。
【図面の簡単な説明】
【0029】
【図1】図1は本発明の実施例1の構成を示す概念図である。
【図2】図2は図1の照明手段の照明状態を示す説明図である。
【図3】図3は図2の照明手段と撮影手段の位置関係を示す説明図である。
【図4】図4は図2の照明領域の構成を概念的に示す平面図である。
【図5】図5は図2に示した照明状態で遮光しない状態の照射領域を示す撮影画像である。
【図6】図6は図5で遮光した状態の照射領域を示す撮影画像である。
【図7】図7は図1に示した構造物調査装置を用いた調査方法を示すフローチャートである。
【図8】図8は本発明の実施例2に係る構造物調査装置を車両に搭載した状態を示す車両の側面側説明図である。
【図9】図9は図8の背面側説明図である。
【図10】図10は実施例2の構造物調査装置によって得られた撮影結果の撮影明度の分布を示すグラフである。
【図11】図11は図10のグラフの明度変化点を示すグラフである。
【図12】図12は図11のグラフに示された明度変化点から作成された明度補正曲線である。
【図13】図13は図12の補正曲線に基づいて算出された補正率によって補正された補正結果の補正後明度の分布を示すグラフである。
【図14】図14は補正のプロセスによって変化する画像を示す説明画像である。
【図15】図15は実施例2によって得られた補正結果の画像である。
【図16】図16は実施例3の調査方法を示すフローチャートである。
【図17】図17は本発明の実施例4の照明手段の照明状態を示す説明図である。
【図18】図18は本発明の実施例5の照明手段の照明状態を示す正面説明図である。
【図19】図19は図18の側面説明図である。
【図20】図20は従来の多灯照明を用いた構造物調査装置の照明の状態を示す説明図である。
【図21】図21は従来の多灯照明を用いた構造物調査装置により得られた撮影結果の画像である。
【図22】図22は光減数が少ない照明装置による陰影の発生状況を示す説明図である。
【図23】図23は図22の照明装置を用いて道路構造物の舗装面を撮影した場合の撮影結果と、その撮影結果を示す画像の明度の分布を示すグラフである。
【発明を実施するための形態】
【0030】
本発明では、照度ムラに起因する撮影結果の明度ムラを補正することにより、必要最小限の少ない光源数で、構造物の表面の欠陥を確実に確認できるようにした。
この明度ムラの補正は、まず、欠陥のない撮影領域、例えば、舗装道路の撮影結果を構成する画素の明度を画素番号順に配列してグラフ化し、そのグラフにおいて、予め定められた特定の画素ピッチ、例えば、200画素ピッチで設定された変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定する。
【0031】
次に、明度変化点をスプライン補間したグラフ、即ち、スプライン曲線を得る。
そして、認識性の高い設定明度、例えば、256階調データであれば、100〜150の間の特定の設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正率(補正係数)とし、これを、補正データ(キャリブレーションデータ)として、撮影領域の撮影時の明度に、上記補正率を掛けた値を補正後の明度とする。
【0032】
この補正率の、補正後の明度は、設定明度の近辺に集中するようになって、明度ムラが平準化されることになる。
この結果、補正後の撮影画像の明度ムラは抑制され、欠陥に生じた陰影の認識を容易にできるようになる。
以下、実施例に基づき、本発明を具体的に説明する。
【実施例1】
【0033】
図1は、本発明の実施例1の構成を示す概念図、図2は、図1の照明手段の照明状態を示す説明図、図3は、図2の照明手段と撮影手段の位置関係を示す説明図、図4は、図2の照明領域の構成を概念的に示す平面図、図5は、図2に示した照明状態で遮光しない状態の照射領域を示す撮影画像、図6は、図5で遮光した状態の照射領域を示す撮影画像、図7は、図1に示した構造物調査装置を用いた調査方法を示すフローチャートである。
【0034】
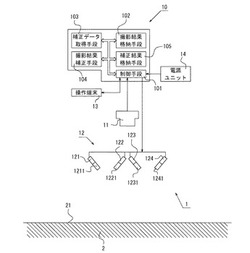
図1〜7中、1は本発明の実施例1に係る構造物調査装置、10は構造物調査装置1のコントロールユニット、101はコントロールユニット10に含まれる制御手段、102はコントロールユニット10に含まれる撮影結果格納手段、103はコントロールユニット10に含まれる補正データ取得手段、104はコントロールユニット10に含まれる撮影結果補正手段、105はコントロールユニット10に含まれる補正結果格納手段、11は撮影手段、11aは撮影手段11の撮影中央線、12は照明手段、121〜124は照明手段12の光源、121a〜124aは光源121〜124の光軸、121bは光源121から照射される光線、1211〜1241は光源121〜124の遮光手段、13は構造物調査装置1の操作に用いられる操作端末、14はコントロールユニット10に電力を供給する電源ユニット、2は構造物、21は構造物2の表面、3は光源121〜124の照射領域の集合域、31a〜31dは照射領域の集合域3の一部を構成する主要照射領域、32aは照射領域の集合域3の一部を構成する中央境界照射領域、32b、32cは照射領域の集合域3の一部を構成する側境界照射領域である。
【0035】
まず、図1〜図6について説明する。
コントロールユニット10は、制御手段101、撮影結果格納手段102、補正データ取得手段103、撮影結果補正手段104、及び、補正結果格納手段105を有する。
制御手段101は、この構造物調査装置1を構成する要素の作動を制御する。
撮影結果格納手段102は、後述する撮影手段の撮影によって得られた撮影結果、即ち、映像や画像を格納する。
【0036】
補正データ取得手段103は、欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正するキャリブレーションデータを取得する。
このキャリブレーションデータは、欠陥のない構造物の表面の撮影結果を解析し、撮影結果中の明度の分布から明度変化点を抽出し、その抽出結果から、スプラインで補完した明度補正曲線を生成し、得られた明度補正曲線に基づいて補正率を算出することによって得られる。
【0037】
撮影結果補正手段104は、補正データ取得手段103によって得られたキャリブレーションデータ、即ち、補正率を用いて、後述する撮影手段によって得られた撮影結果を補正し、撮影結果中の明度のムラを平準化する。
補正結果格納手段105は、撮影結果補正手段104で補正された補正結果を格納する。
【0038】
撮影手段11は、制御手段101の制御に応じ、撮影領域を撮影し、撮影結果をコントロールユニット10に対して送出する。
この撮影手段11は、撮影領域となる構造物2の表面21に対し、撮影手段11の撮影領域の中央に向かう撮影中央線11aが垂直になるよう配置される。
【0039】
照明手段12は、4組の遮光手段1211〜1241を備えた光源121〜124を有し、制御手段101の制御に応じ、点灯する。
各光源121〜124の構造は同様であるので、代表して光源121について説明する。
【0040】
光源121は、内部に図示しない発光部と、集光手段とを有する。
この光源121は、集光手段のレンズによって集光された光線121bを照射する。
なお、この光線121bは、遮光手段1211による遮光が行われない状態の照射範囲を示すものである。
【0041】
図示しない発光部は、発光ダイオード(LED)である。
図示しない集光手段は、発光部から発せられる光線を、所定の範囲に収束させる図示しないレンズと、レンズから出射される光線を部分的に遮光し、その遮光量を調整可能な遮光手段を有する。
【0042】
照射領域の集合域3は、主要照射領域31a〜31d、中央境界照射領域32a、及び、側協会照射領域32b、32cからなる。
なお、この照射領域の集合域3の構成については、照明手段12の光源121〜124の配置の説明時に、併せて説明する。
【0043】
操作端末13は、例えばモニタのような表示手段と、構造物調査装置1の操作に必要な入力に使用される入力部を備えたものであり、例えば、モバイル端末が挙げられる。
この操作端末13は、コントロールユニット10に接続され、構造物調査装置1の操作に必要な操作画面を表示すると共に、撮影結果及び補正結果を表示し、さらに、ユーザからの入力に応じて、制御手段101に対して、構造物調査装置1の作動の制御に必要な指示信号を出力する。
【0044】
電源ユニット14は、コントロールユニット10に対して、構造物調査装置1の作動に必要な電力を供給する。
構造物2は、アスファルトやコンクリート製の構造物であり、例えば、道路構造物が挙げられる。
表面21は、構造物2の表面であり、例えば、道路構造物の舗装面が挙げられる。
【0045】
次に、照明手段12の配置、及び、遮光について説明する。
各照明手段121〜124は、それぞれ異なる個別の照射領域を有する。
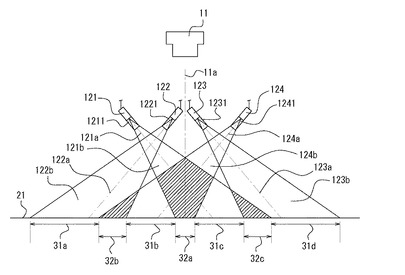
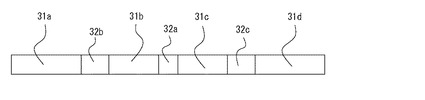
照射領域の集合域3は、個別の照射領域の集合域であって、帯状に延び、図3に示したように、一方の端縁から順次、主要照射領域31a、側境界照射領域32b、主要照射領域31b、中央照射領域32a、主要照射領域31c、側境界照射領域32c、及び、主要照射領域31dに区分される。
【0046】
即ち、照射領域の集合域3は、撮影手段11の中央に設定される中央照射領域32aと、中央照射領域32aの両側にそれぞれ主要照射領域31b、31cを介して設定される側境界照射領域32b、32cとを境界に4分割される。
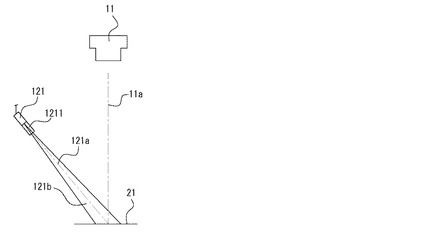
照明手段121〜124は、図2及び図3に示されるように、同一直線上に一列に配置され、図3に示されるように、光線を構造物2の表面21に対して斜めに照射する。
【0047】
そして、両側の2組照明手段121、124は、互いの光軸121a、124aが交差した後、一方の照明手段121は、中央照射領域32a、主要照射領域31c、及び、側境界照射領域32cを、また、他の一方の照明手段124は、中央照射領域32a、主要照射領域31b、及び、側境界照射領域32bが照射領域となるよう、光線の集光度と設置角度が調整される。
【0048】
また、中央の2組の照明手段122、123は、互いの光軸122a、123aが交差した後、一方の照明手段122は、側境界照射領域32b、及び、主要照射領域31aを、また、他の一方の照明手段123は、側境界照射領域32d、及び、主要照射領域31dが照射領域となるよう、光線の集光度と設置角度が調整される。
【0049】
従って、この照射領域の集合域3を構成する領域のうち、主要照射領域31a〜31dには、光源121〜124のうち、何れか1組の光源からの光線が照射され、中央境界照射領域32a、及び、側境界照射領域32b、32cには、2組の光源からの光線が重複して照射される。
【0050】
この2組の光線が重複して照射される状態は、図2に示された光線内に斜線として示した。
この重複した領域では、光線の照射の重複により、図5の白枠で示したように、明度ムラが生じる上、隣接する領域の境界が明瞭になる。
【0051】
そこで、各光源121〜124の遮光手段1211〜1241を調整し、各光源121〜124から照射される光線のうち、中央境界照射領域32a、及び、側境界照射領域32b、32cに照射される光線を、光源近傍で遮蔽し、これらの領域に達する光線を減光させる。
上記のように、遮光手段1211〜1241によって、光線の一部を遮光し、図6の白枠で示したように、明度ムラを軽減し、隣接する領域の境界を目立たなくする。
【0052】
次に、図7に基づき、上記の実施例1による構造物の調査方法について説明する。
なお、以下の説明で実行される動作は、ユーザが操作する操作端末13からの指令に基づいて実行される。
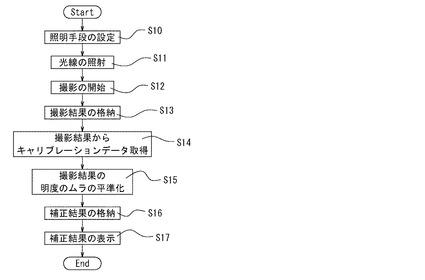
実施例1に係る構造物調査装置1を使用するときには、まず、照明手段12の設定を行う。
【0053】
即ち、照明手段12の配置及び角度を、図2、図3に示したように調整して照射領域が図4に示された配置になるようにし、遮光手段1211〜1241の遮光域を調整して、光線が重複する照射領域に達する光線を制限する(ステップS10)。
【0054】
次に、欠陥が認められないことをユーザが確認した構造物2の表面21に、照明手段12によって、構造物2の表面21を照射し(ステップS11)、撮影手段11によって、表面21上の照射領域の集合域3を撮影して、欠陥が認められない撮影結果を得て、続いて、調査対象となる領域の表面21を撮影して調査対象となる撮影結果を得る(ステップS12)。
この撮影結果は、順次、撮影結果格納手段102に格納され、撮影結果の確認や解析に利用可能に保持される(ステップS13)。
【0055】
次に、補正データ取得手段103は、撮影結果のうち、欠陥のない構造物2の表面21の撮影領域を撮影した撮影結果に基づき、キャリブレーションデータとして、その撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、その明度補正曲線に基づいて補正率を算出する(ステップS14)。
【0056】
次に、調査対象領域を撮影して得られた撮影結果の明度のムラが、キャリブレーションデータ、即ち、得られた補正率を用い平準化される(ステップS15)。
平準化された補正画像は、補正結果格納手段105に格納される(ステップS16)。
そして、補正結果格納手段105に格納された補正結果は、端末装置13を介したユーザの要求に応じて、その表示手段に表示され、ユーザによる欠陥の判断に供される(ステップS17)。
【0057】
上記の構造物調査装置1を用いてこうぞ物の表面を調査すると、必要最小限の数の光源を備えた照明手段を用いることにより、欠陥による陰影を明瞭に発生させると共に、光減数の減少に伴った撮影結果中の明度ムラを平準化させることにより、欠陥により発生した陰影を認識しやすくなる。
【実施例2】
【0058】
図8は、本発明の実施例2に係る構造物調査装置を車両に搭載した状態を示す車両の側面側説明図、図9は、図8の背面側説明図、図10は、実施例2の構造物調査装置によって得られた撮影結果の撮影明度の分布を示すグラフ、図11は、図10のグラフの明度変化点を示すグラフ、図12は、図11のグラフに示された明度変化点から作成された明度補正曲線、図13は、図12の補正曲線に基づいて算出された補正率によって補正された補正結果の補正後明度の分布を示すグラフ、図14は、補正のプロセスによって変化する画像を示す説明画像、図15は、実施例2によって得られた補正結果の画像である。
【0059】
なお、この実施例2の基本構成は、実施例1と同様であるので、相違点を中心に説明し、重複する説明は省略する。
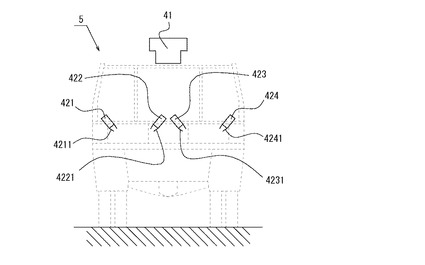
図8〜15中、4は本発明の実施例2に係る構造物調査装置、40はコントロールユニット、41は撮影手段、41aは撮影中央線、42は照明手段、420は光源ユニット、421〜424はレンズユニット、421aは光軸、421bは光線、4211〜4241は遮光手段、43は光ファイバーケーブル、5は車両である。
【0060】
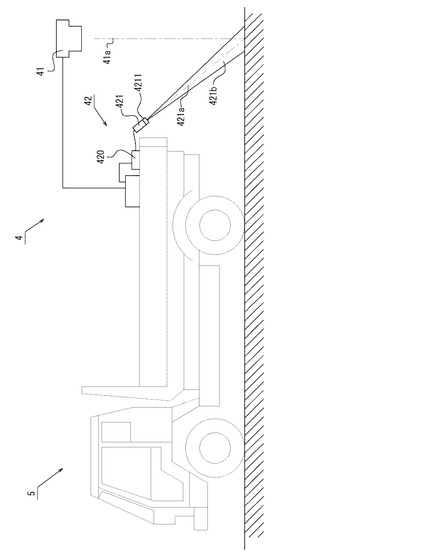
構造物調査装置4は、車両5の荷台後部に取り付けられる。
この構造物調査装置4は、実施例1の構造物調査装置1とは、照明手段42の構成が異なる。
照明手段42は、光源ユニット420、レンズユニット421〜424、遮光手段4211〜4241、及び、光ファイバーケーブル43を具備する。
光源ユニット420は、各レンズユニット421〜424に対応した、図示しない光線出射口を有する。
【0061】
また、光源ユニット420には、各レンズユニット421〜424に対応したが内蔵され、この光源は、それぞれ反射光を備える。
各光源の光線は、光源ユニット420内で反射手段によって集光され、上記の光線出射口に集光される。
【0062】
光源ユニット420の光線射出口には、それぞれ、光ファイバーケーブル43の一端が接続され、光ファイバーケーブル43の他の一端には、それぞれ、レンズユニット421〜424が接続される。
なお、光ファイバーケーブル43は、図8では1本しか記載されておらず、また、図9では省略されているが、各レンズ集光手段421〜424は、図示しない光ファイバーケーブを介して光源ユニット420に接続されるものである。
【0063】
レンズユニット421〜424は、光ファイバーケーブル43から射出される光線が所要の領域を照射し得るよう光線を収束すると共に、光線の射出方向を照射領域に向けて揃えるものである。
【0064】
撮影手段41と、レンズユニット421〜424は、図示しない取付手段を介して、それぞれの角度及び配置が、実施例1における撮影手段11と、光源121〜124と同様になるよう、車両5に取り付けられる。
そして、遮光手段4211〜4241も、実施例1のおける遮光手段1211〜1241と同様に、その照射範囲の一部を遮光するよう調整される。
【0065】
次に、実施例2に記載の構造物調査装置4を用いて、道路構造物の舗装面の欠陥の調査した場合について具体的に説明する。
なお、この調査は、夜間に行った。
まず、図8及び図9に示されるように構造物調査装置4を搭載し、照明手段42の設定がなされた車両5を道路構造物上に移動させる。
【0066】
このとき、照明の照射領域内に、目視にて欠陥がないことを確認する。
次に、照明手段42を作動させた状態で、撮影手段41にて、欠陥のない道路構造物の舗装面を撮影する。
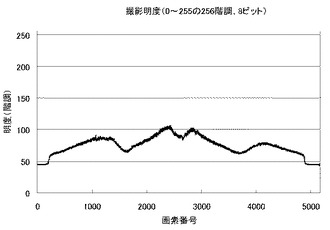
次に、この撮影結果を構成する各画素の明度を解析し、各画素の明度を取得する。
この各画素の明度を、縦軸を256階調、横軸を画素番号にしたグラフに示したものが、図10のグラフである。
【0067】
次に、この撮影明度のグラフに示された、撮影結果の明度の分布から、明度変化点を抽出し、スプラインで補間した明度補正曲線を作成する。
本実施例において設定された明度変化点の具体例を図11に示す。
この明度変化点について、舗装面に現れるひび割れのような欠陥は、舗装面のテクスチャとして現れるため、明度変化点を細かい間隔で設定すると、欠陥の陰影を劣化させる可能性がある。
【0068】
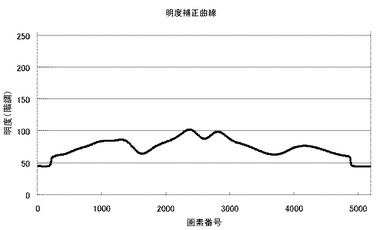
このため、明度変化点は、大まかな光量変化のみを補正し得る程度の最低限必要な個数であることが望ましく、例えば、撮影結果が5200画素の画像である場合、まず、200画素ピッチ程度で変化点を設定した上で、さらに、図10に示した明度のグラフの変化のピークとなる山と谷の部分を変化点として補間し、これらの変化点を明度変化点とする。
【0069】
そして、この明度補正曲線に基づき、明度変化点をスプラインで補間したグラフが、図12のグラフである。
また、スプラインによる補間には、例えば、従来公知の3次スプライン関数を用いた3次スプライン補間法が用いられる。
【0070】
次に、明度補正曲線に基づいて補正率を算出する。
この補正率は、撮影結果を構成する画素の明度のムラを平準化するために用いられる。
この補正率は、各画素のスプライン曲線上の値と、設定明度によって決定される。
例えば、8ビット、0〜255までの256階調のデータの場合、最も表示が見やすい明度は、100〜150の間であるため、この明度のデータの認識性を高める補正率を採用する。
具体的には、各画素の明度補正率は、次の式によって求められる。
補正率=設定明度/各画素のスプライン曲線上の値
【0071】
本発明では、上記の補正率を用いて撮影結果の明度のムラを平準化し、補正結果を取得する。
このとき、補正後の明度は、以下の式によって求められる。
補正後の明度=撮影時の明度×(設定明度/各画素のスプライン曲線の上の値)
この補正結果の各画素の明度をグラフ示したものが、図13に示したグラフである。
【0072】
ここで、撮影結果の明度の平準化について、欠陥がない舗装面の撮影結果の明度を平準化した場合で、実際の撮影結果を用いて具体的に説明する。
なお、本来の構造物調査では、欠陥がないことが予め確認されている舗装面の撮影結果について、その明度の平準化は、実行してもしなくてもよい。
【0073】
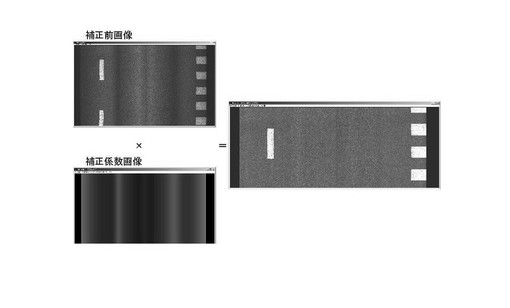
図10に示した撮影明度を有する撮影結果は、図14の左上に示した「補正前画像」となる。
この「補正前画像」では、縦方向に沿った筋状に明暗に差があるムラが存在することがわかる。
そして、図12に示した明度補正曲線に基づいた補正率を示す補正係数の明度を反映させた画像が、図14の左下に示した「補正係数画像」である。
この場合、補正率=補正係数であり、図14は、係数値を明暗で擬似表示した画像である。
【0074】
この「補正係数画像」には、「補正前画像」で認められる明暗を反転させた明度ムラが存在する。
そして、「補正前画像」に「補正係数画像」を掛け合わせると、図14の右側に示した補正結果を示す画像となる。
この補正結果では、補正前画像に認められた縦方向のムラがなくなり、画像内の明度が平準化され、画像上で舗装面をはっきり確認できることがわかる。
【0075】
上記の実施例で、実際に舗装面の欠陥を調査する場合には、上記の通り、補正データとして補正率を取得した後、照明手段42によって舗装面を照明し、撮影手段41で、舗装面上の照明手段42の照射領域を撮影しながら、車両5を走行させて撮影結果を取得し、撮影結果をコントロールユニット40内の撮影結果格納手段に格納する。
【0076】
また、この撮影結果の取得に並行して、キャリブレーションデータ、即ち、上記の補正率を用いて撮影結果の明度のムラの平準化を実行する。
そして、この平準化によって得られた補正結果をコントロールユニット40内の補正結果格納手段に格納する。
【0077】
また、必要に応じ、この平準化の処理と並行して、平準化の処理によって得られた補正結果の画像は、図示しない操作端末の表示手段に随時表示され、ユーザが、平準化処理の状況を確認できるようになっている。
【0078】
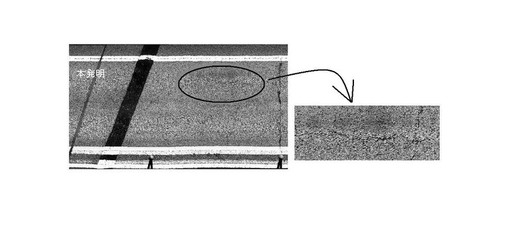
補正結果格納手段に格納された補正結果は、明度ムラが除去された舗装面の画像として、ユーザの要求に応じて表示手段に表示され、欠陥の有無の調査に供される。
図15は、この明度ムラが除去された舗装面の画像の一部である。
図15の左側画像の黒丸で囲んだ領域の拡大画像が、図15の右側の画像である。
【0079】
この画像では、車両の走行方向、即ち、図15では、左右方向に沿った欠陥の陰影がはっきりと確認できる。
なお、上記の実施例において、欠陥の陰影が彩度の要素を含む場合では、明度ムラが除去された画像では、欠陥の陰影がさらにはっきり確認できる。
【実施例3】
【0080】
次に、図16に基づき、本発明に係る構造物調査装置を用いた実施例3の調査方法を説明する。
図16は、実施例3の調査方法を示すフローチャートである。
実施例3は、その主要構成は実施例2と同様であり、撮影開始から撮影結果の明度のムラの平準化の処理へ至るまでの工程が一部異なる。
【0081】
実施例3では、まず、実施例2と同様に、照明手段を設定し(ステップS20)、調査すべき道路構造物の舗装面に光線を照射し(ステップS21)、撮影手段によって撮影を開始し(ステップS22)、撮影結果を格納する(ステップS23)。
次に、撮影結果から、欠陥がない舗装面の撮影結果を特定する(ステップS24)。
【0082】
この欠陥がない撮影結果は、ユーザの目視により、舗装面に欠陥が認められない場所から撮影を開始するようにしておき、撮影開始時の撮影結果を欠陥がない舗装面とみなすことにより特定されるが、例えば、撮影結果を端末装置の表示手段に表示させ、その表示結果を見たユーザが、欠陥がないと思われる撮影結果の範囲を指定し、指定された撮影結果の部分を欠陥がない撮影結果に特定してもよい。
次に、撮影結果中の特定された範囲の撮影結果に基づき、実施例2と同様にキャリブレーションデータを取得する。
【0083】
次に、キャリブレーションデータの取得が完了したとき、撮影結果格納手段に格納された撮影結果を、実施例2と同様にキャリブレーションデータで補正し、補正結果を得て(ステップS26)、補正結果を格納し(ステップS27)、補正結果を表示する(ステップS28)。
【0084】
本発明は上記のように構成されるので、本発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影を確実に確認できるようになる。
【実施例4】
【0085】
次に、図17に基づき、本発明に係る構造物調査装置の実施例4の構成を説明する。
図17は、実施例4の照明手段の照明状態を示す説明図である。
なお、この実施例4の主要構成は、光源が照明ユニットに変更された構成以外は、実施例1と同様であるので、相違点を中心に説明し、重複する説明は省略する。
【0086】
図17中、61は撮影手段、61aは撮影手段61の撮影中央線、621、622は照明ユニット、621b、622bは照明ユニット621、622の光線である。
この照明ユニット621、622は、内部に図示しない光源を有し、各光源から拡散する光線を広範の領域に収束させる集光手段として、それぞれ、図示しない広角レンズを有する。
【0087】
照明ユニット621、622は、その光軸が交差しないよう配置され、一方の照明ユニット621は、撮影手段61の撮影領域の一方の端部領域から、撮影中央線61aに至る領域を照射し、他の一方の照明ユニット622は、撮影手段61の撮影領域の他の一方の端部領域から、撮影中央線61aに至る領域を照射する。
【0088】
この実施例では、各照明ユニット621、622の照明領域の重複が、撮影中央線61aの付近にのみ発生するため、光線の重複による明度ムラの発生が少なく、明度ムラの補正が容易になる。
【実施例5】
【0089】
次に、図18及び図19に基づき、本発明に係る構造物調査装置の実施例5の構成を説明する。
図18は、実施例5の照明手段の照明状態を示す正面説明図、図19は、図18の側面説明図である。
この実施例5は、実施例4の構成と撮影手段の個数、及び、照明ユニットの配置が異なるので、実施例4との相違点を中心に説明する。
また、この実施例5は、図8で示された実施例と同様に、車両の後方に取り付けられる。
【0090】
図18〜19中、711、712は撮影手段、711b、712bは撮影手段71、72の撮影領域、721、722は照明ユニット、721b、722bは照明ユニット721、722の光線である。
なお、以下の説明における前後左右のうち、左方とは、図17における左側、前方とは、図18に置ける左側を示し、同様に以下の説明における右方及び後方は、上記の方向の逆側を示すものである。
【0091】
一方の撮影手段711は、調査対象となる路面の左方の領域を撮影し、他の一方の撮影手段712は、その路面の右方の領域を撮影し得る位置であって、かつ、一方の撮影手段711の撮影領域が、他の一方の撮影手段712の撮影より前方に位置するよう配置され、各撮影手段711、712の撮影領域が重複しないよう設定される。
照明ユニット721、722は、実施例4と同様に広角レンズを備えたものである。
【0092】
一方の照明ユニット721は、前方に設けられた撮影手段711の撮影領域を、その撮影領域から離れた位置、具体的には、図18の右方から撮影領域に向けて斜め左下方向に照明する。
他の一方の照明ユニット722は、後方に設けられた撮影手段712の撮影領域を、その撮影領域から離れた位置、具体的には、図19の左方から撮影領域に向けて斜め右下方向に照射する。
【0093】
本実施例では、重複する照明領域がないため、明度ムラを抑制できるようになって、構造物の欠陥を認識し易くなり、さらに、欠陥に対して光線を鋭角に照射することができるようになって、欠陥で陰影を明瞭に発生させることが可能になる。
また、本実施例では、2台の撮影手段の撮影領域の前後方向のズレに基づき、前後方向のズレを補正して合成した画像を作成する画像処理を実施することにより、画像を目視したユーザが直感的に路面状態を把握できるようにすることが可能である。
【0094】
なお、本発明は上記の実施例に限定されるものではない。
例えば、照明手段の光源には、LED照明の他、ハロゲンランプ、メタルはライドランプ(HID)など、どのような種類の光源を使用しても良い。
また、照明手段によって照射される光線は、欠陥に対して斜めに照射され、欠陥に陰影を発生し得るものであればどのような角度であってもよいが、構造物の表面に対して40〜50度程度であれば、好適な陰影を発生させることができる。
【0095】
また、撮影手段は、撮影領域を直接撮影せずに、反射鏡を介して間接的に撮影するようにしてもよい。
また、撮影手段の撮影方向は、実施例では、撮影領域に対して垂直になるよう配置されているが、画像内の陰影の確認が困難にならなければ、垂直でなくてもよい。
【0096】
また、実施例1では、キャリブレーションデータを得るため、調査対象となる表面とは別に、欠陥がない表面を撮影したが、調査対象となる表面の撮影結果を表示手段に表示させ、ユーザが、画像中から、欠陥がないと思われる範囲や箇所を特定し、その特定された範囲等を欠陥がない表面の撮影結果とみなして、キャリブレーションデータを得るようにしてもよく、また、ユーザが目視にて欠陥がないことを確認した構造物の表面から撮影を開始し、撮影結果のうち、撮影開始時の撮影結果の箇所を欠陥がない表面の撮影結果として、キャリブレーションデータを得るようにしてもよい。
【0097】
また、キャリブレーションデータは、撮影結果の明度を平準化し得るものであればどのようなものであってもよく、必ずしも補正率を算出する必要はなく、例えば、得られた明度補正曲線を直接利用して、明度を平準化するようにしてもよい。
また、キャリブレーションデータは、照明の設定が固定されていれば、作業の都度設定し直す必要はなく、一度取得したキャリブレーションデータを再利用するようにしてもよい。
【0098】
また、実施例では、照明手段の光源の数は4組であったが、主要な照射領域が重複しないように配光できれば4組に限定されず、また、その光線の照射方向も実施例の組み合わせに限定されない。
また、撮影結果や補正結果は必要に応じて格納しなくてもよい。
【0099】
また、実施例2または3において、操作端末をノートパソコンのようなモバイル端末とし、この端末を車両の運転室に設置し、調査のために撮影を行っている間、端末の表示手段に、撮影結果及び補正結果の画像のうち、少なくともいずれか一方を表示し、ユーザが、処理の進捗状況を運転室で確認できるようにしてもよい。
【0100】
また、本発明に係る構造物調査装置の調査対象は、道路構造物に限定されず、例えば、建築構造物であってもよく、また、その表面は、舗装面、具体的には、アスファルト面やコンクリート面に限定されず、クラック様の欠陥が生じうるような表面、例えば、タイル面や塗装面でもよく、さらに、光線の照射により陰影が生じ得る欠陥が表面に発生する特性を有する材料であれば、調査対象になり得る。
【0101】
また、実施例2及び3では、本発明に係る構造物調査装置は、走行し得る車両に搭載されているが、人力で移動させ得る台車等に載せてもよく、また、構造物調査装置は固定し、調査対象を移動させるようにしてもよい。
また、中央境界照射領域と側境界照射領域の、主要照射領域に対する割合は、実施例に示したものに限定されず、例えば、両境界照射領域の割合をできるだけ低くしたり、境界照射領域が発生しないよう照明手段を設定したりしてもよい。
また、実施例5では、2台の撮影手段を採用したが、2台以上の撮影手段を用いてもよい。
さらに、本発明は、本発明の範囲内で自由に設計変更し得るものであり、上記実施例に限定されるものではない。
【産業上の利用可能性】
【0102】
本発明では、構造物の表面、特に、道路構造物の舗装面の欠陥の調査を、車両や人通りを始めとする交通が少ない夜間に実行して欠陥を確実に確認できるようになり、ユーザの利便性の向上の点で利用可能性が高い。
【符号の説明】
【0103】
1 構造物調査装置
10 コントロールユニット
101 制御手段
102 撮影結果格納手段
103 補正データ取得手段
104 撮影結果補正手段
105 補正結果格納手段
11 撮影手段
11a 撮影中央線
12 照明手段
121 光源
121a 光軸
121b 光線
1211 遮光手段
122 光源
122a 光軸
122b 光線
1221 遮光手段
123 光源
123a 光軸
123b 光線
1231 遮光手段
124 光源
124a 光軸
124b 光線
1241 遮光手段
13 操作端末
14 電源ユニット
2 構造物
21 表面
3 照射領域の集合域
31a 主要照射領域
31b 主要照射領域
31c 主要照射領域
31d 主要照射領域
32a 中央境界照射領域
32b 側境界照射領域
32c 側境界照射領域
4 構造物調査装置
40 コントロールユニット
41 撮影手段
41a 撮影中央線
42 照明手段
420 光源ユニット
421 レンズユニット
421a 光軸
421b 光線
4211 遮光手段
422 レンズユニット
4221 遮光手段
423 レンズユニット
4231 遮光手段
424 レンズユニット
4241 遮光手段
43 光ファイバーケーブル
5 車両
61 撮影手段
61a 撮影中央線
621 照明ユニット
621b 光線
622 照明ユニット
622b 光線
711 撮影手段
711a 撮影中央線
711b 撮影領域
712 撮影手段
712a 撮影中央線
712b 撮影領域
721 照明ユニット
721b 光線
722 照明ユニット
722b 光線
A 光源
B 光線
C 集光手段
D 欠陥
【技術分野】
【0001】
構造物の表面、特に、道路構造物の舗装面の欠陥を調査する装置に関するものである。
【背景技術】
【0002】
コンクリートやアスファルトを用いた構造物、特に、道路構造物の舗装面は、それ自体の劣化に加え、長年に渡る気象の変化や、地盤の変化、荷重負荷の影響により、その表面にひび割れが発生する。
このひび割れは、構造物の本格的な損壊、即ち、部分的な破壊や剥離の前兆であるため、調査によってひび割れを早期に発見し、補修することは、構造物の損壊を防止する上で非常に重要な作業となっている。
【0003】
従来、このようなひび割れの発見には、例えば、特願平9−96515号に開示されるひび割れ調査装置が使用される。
この従来のひび割れ調査装置は、車両に搭載したカメラにより路面を撮影し、撮影画像を解析することによって路面のひび割れを検出するものである。
【0004】
しかしながら、上記の従来技術では、路面の撮影は、太陽光(自然光)の下で行われるため、撮影時の季節、天候、時刻によって、ひび割れの映り方が変化して、ひび割れを検出できなくなる可能性があり、ひび割れの適正な検出ができない、という問題があった。
また、太陽光を利用するものであるため、検出作業が日中に限定され、走行車両が少ない夜間には作業ができない、という問題もあった。
【0005】
一方、上記と同様の調査装置で、太陽光に代えて照明装置を利用し、夜間にも路面の欠陥を検出する技術が提案されている。
このような従来の調査装置で用いられる照明装置は、撮影領域内の路面をはっきりと映し出すことが重要視されていた。
そこで、撮影領域における照度を所定レベル以上に均一に調整するために、従来の照明装置には、ハロゲンランプ等の高照度の光源Aを多数備え、光源からの光線Bをレンズを備えた集光手段Cによって、所定の照射領域に収束し得るものが利用されていた。
【0006】
しかしながら、光源A数が多いと、確認が困難なクラックやひび割れを始めとする欠陥Dがあるという問題があった。
例えば、従来の照明装置を利用した調査装置を搭載した車両を用いた場合、車両の進行方向に平行な方向に延びる欠陥Dには、図20に示したように、様々な角度から複数の光源Aの光線Bが差し込み、欠陥内に発生する陰影を打ち消してしまう。
【0007】
具体的には、このような多灯照明の下での撮影では、図21に示したように、欠陥の陰影を認めることができない。
即ち、この図21において、左側の画像の黒丸で囲んだ領域には、車両の進行方向、即ち、画像の左右方向に沿って、ヒビ状の欠陥が存在する。
図21の右側の画像は、左側の画像の黒丸で囲まれた領域の拡大画像であるが、この拡大画像には、欠陥を示すような陰影は認められない。
このように、上記の従来技術では、車両の進行方向に平行に延びる欠陥を発見することはできなかった。
【0008】
上記の陰影の打ち消しについては、光源数が少ない照明装置を使用すれば、防止することが可能である。
この場合、図22に示したように、車両の進行方向に平行な方向に延びる欠陥Dには、陰影Eが発生し、発生した陰影が他の光源の光線によって打ち消されることはない。
【0009】
しかしながら、光源数を減らせば、今度は、図23に示したように、照明領域の照度ムラが激しくなり、陰影の確認自体が困難になって、撮影結果から欠陥を確認できなくなる、という問題があった。
なお、本明細書において、明度とは、撮影手段によって得られた撮影結果、即ち、画像又は映像における256階調の明るさの度合いを示し、照度とは、光源からの光の明るさ(例えばルクス)の度合いを示す。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−96515号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであって、映像や画像を解析することによって、構造物、特に、道路の舗装面に生じた欠陥を検出する際に、その欠陥がクラックやひび割れのような細かなもの、又は、比較的開口部が広く、深さが浅いものであっても、照明装置を用いて確実に検出し、構造物の状態を的確に調査できるようにする構造物調査装置及び構造物調査方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明の第1発明に係る構造物調査装置は、
撮影して得られた撮影結果に基づいた構造物の表面の欠陥の判断に用いられる構造物調査装置において、
構造物の表面の撮影領域を照射する複数の光源を有し、各光源による光線の主要な照射領域が重複しない複数の光源を有する照明手段と、
照明手段の光源によって照射された撮影領域を撮影して撮影結果を取得し、欠陥のない構造物の表面と、調査対象となる構造物の表面とを撮影する撮影手段と、
撮影手段によって得られた撮影結果のうち、欠陥のない構造物の表面の撮影結果から、撮影結果の明度のムラを補正する補正データを取得する補正データ取得手段と、
補正データ取得手段によって得られた補正データを用いて、撮影結果のうち、構造物の表面の調査対象領域を撮影して得られた撮影結果の明度のムラを平準化する撮影結果補正手段と
を具備することを特徴とする。
【0013】
また、第2発明に係る構造物調査装置は、第1発明において、
照明手段の各光源が、各光源から拡散する光線を、それぞれ所定の範囲に収束させる集光手段を有することを特徴とする。
【0014】
また、第3発明に係る構造物調査装置は、第2発明において、
照明手段の各光源の照射領域が、それぞれ、照射領域が重複しない主要照射領域と、隣接する照射領域との境界に形成され、隣接する照射領域と重複する境界照射領域とからなり、
照明手段の集光手段が、集光レンズと、遮光手段とからなり、
遮光手段は、境界照射領域に照射される光線を遮光し、境界照射領域に到達する光量を減少させる
ことを特徴とする。
【0015】
また、第4発明に係る構造物調査装置は、第1から第3発明の何れかにおいて、
補正データ取得手段が、
撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、得られた明度補正曲線を補正データとする
ことを特徴とする。
【0016】
また、第5発明に係る構造物調査装置は、第4発明において、
補正データ取得手段が、
明度補正曲線に基づいて補正率を算出し、得られた補正率を補正データとし、
撮影結果補正手段が、
補正データ取得手段によって得られた補正率を用いて撮影結果の明度のムラを平準化する
ことを特徴とする。
【0017】
また、第6発明に係る構造物調査装置は、第1から第5発明の何れかにおいて、
照明手段及び撮影手段に対し、構造物の表面が相対移動し、
照明手段の光源が、移動方向に直交する方向に沿って4組配置され、
各光源の照射領域の集合域が、撮影領域の中央に、移動方向に沿って設定される中央境界照射領域と、中央境界領域の両側に中央境界照射領域と所定間隙を介して設定される側境界照射領域とを境界に4分割され、
両端の2組の光源は、互いの光源の光軸が交差した後、中央境界領域から側境界領域に至る照射領域を照射するよう、それぞれ配置され、
中央の2組の光源は、各光源の光軸が、両端の光源のうち、隣り合う光源の光軸と交差した後、側境界領域の外側の照射領域を照射するよう、それぞれ配置される
ことを特徴とする。
【0018】
また、第7発明に係る構造物調査装置は、第1から第6発明の何れかにおいて、車両に取り付けられ、道路構造物の舗装面の欠陥を検出することを特徴とする。
【0019】
また、第8発明に係る構造物調査装置は、第1から第7発明のいずれかにおいて、
補正データ取得手段が、
欠陥のない構造物の表面の撮影結果を構成する画素の明度の変化をグラフ化し、そのグラフ化において、予め定められた画素ピッチで設定される変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定し、
明度変化点をスプライン補間したスプライン曲線を作成し、予め定められた設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正データとして画素毎に算出し、
撮影結果補正手段が、
撮影結果を構成する各画素の明度に、各画素に対応する補正データを掛けて撮影結果の明度ムラを平準化する
ことを特徴とする。
【0020】
上記目的を達成するため、本発明の第9発明に係る構造物調査方法は、
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面を撮影して撮影結果を取得するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、撮影結果の明度のムラを補正する補正データを取得するステップと、
光線が照射された構造物の表面の調査対象領域となる撮影領域を撮影して撮影結果を取得するステップと、
調査対象領域を撮影して得られた撮影結果の明度のムラを、補正データを用いて平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなることを特徴とする。
【0021】
上記目的を達成するため、本発明の第10発明に係る構造物調査方法は、
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面とみなし得る撮影領域を含む調査対象領域となる撮影領域を撮影するステップと、
撮影結果を格納するステップと、
撮影結果から、欠陥のない構造物の表面を撮影したとみなす撮影結果を特定するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正する補正データを取得するステップと、
補正データを用いて、格納されている撮影結果の明度のムラを平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなることを特徴とする。
【発明の効果】
【0022】
第1及び8発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影が明度のムラにまぎれることがなくなり、欠陥を確実に確認できるようになる。
【0023】
また、第2発明によれば、構造物の表面に到達する光線を平行光に近づけることができるようになり、撮影領域を太陽光下と同様の照明環境にすることができ、欠陥に生じる陰影を明瞭にすることが可能になる。
【0024】
また、第3発明によれば、境界照射領域に達する光線を遮光手段によって減光させることにより、各光源により形成される照射領域のエッジをぼかし、照射領域同士のつなぎ目を目立たなくすることができるため、構造物の表面の欠陥の検出精度を高めることができる。
【0025】
また、第4発明及び第5発明によれば、得られた撮影結果の明度ムラを効果的に補正し、明度を平準化することができるようになって、構造物の表面の欠陥の検出精度を高めることができる。
【0026】
また、第6発明によれば、構造物の表面の欠陥に対する光線の照射角度が斜めになり、かつ、各光源の照射領域の面積が同様になるので、陰影を効果的に発生させることができると共に、撮影領域の照度の極端なばらつきを抑制することができるようになる。
【0027】
また、第7発明によれば、道路構造物の舗装面の欠陥を、車両を走行させるだけで簡単に検出することができるようになる。
【0028】
また、第9及び第10発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影を確実に確認できるようになる。
【図面の簡単な説明】
【0029】
【図1】図1は本発明の実施例1の構成を示す概念図である。
【図2】図2は図1の照明手段の照明状態を示す説明図である。
【図3】図3は図2の照明手段と撮影手段の位置関係を示す説明図である。
【図4】図4は図2の照明領域の構成を概念的に示す平面図である。
【図5】図5は図2に示した照明状態で遮光しない状態の照射領域を示す撮影画像である。
【図6】図6は図5で遮光した状態の照射領域を示す撮影画像である。
【図7】図7は図1に示した構造物調査装置を用いた調査方法を示すフローチャートである。
【図8】図8は本発明の実施例2に係る構造物調査装置を車両に搭載した状態を示す車両の側面側説明図である。
【図9】図9は図8の背面側説明図である。
【図10】図10は実施例2の構造物調査装置によって得られた撮影結果の撮影明度の分布を示すグラフである。
【図11】図11は図10のグラフの明度変化点を示すグラフである。
【図12】図12は図11のグラフに示された明度変化点から作成された明度補正曲線である。
【図13】図13は図12の補正曲線に基づいて算出された補正率によって補正された補正結果の補正後明度の分布を示すグラフである。
【図14】図14は補正のプロセスによって変化する画像を示す説明画像である。
【図15】図15は実施例2によって得られた補正結果の画像である。
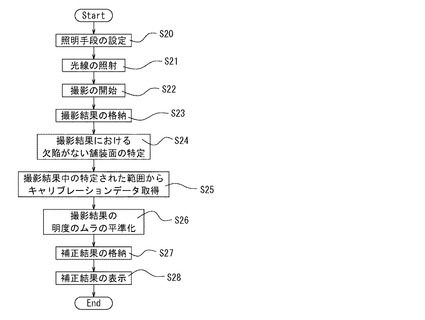
【図16】図16は実施例3の調査方法を示すフローチャートである。
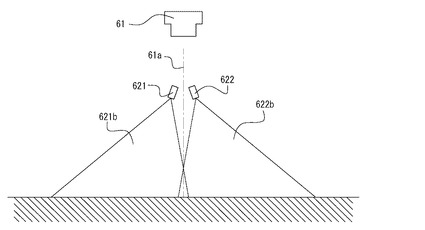
【図17】図17は本発明の実施例4の照明手段の照明状態を示す説明図である。
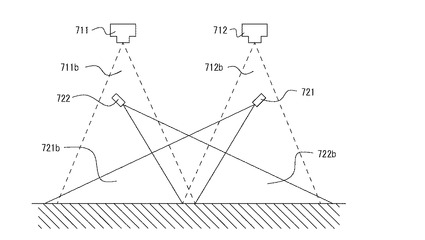
【図18】図18は本発明の実施例5の照明手段の照明状態を示す正面説明図である。
【図19】図19は図18の側面説明図である。
【図20】図20は従来の多灯照明を用いた構造物調査装置の照明の状態を示す説明図である。
【図21】図21は従来の多灯照明を用いた構造物調査装置により得られた撮影結果の画像である。
【図22】図22は光減数が少ない照明装置による陰影の発生状況を示す説明図である。
【図23】図23は図22の照明装置を用いて道路構造物の舗装面を撮影した場合の撮影結果と、その撮影結果を示す画像の明度の分布を示すグラフである。
【発明を実施するための形態】
【0030】
本発明では、照度ムラに起因する撮影結果の明度ムラを補正することにより、必要最小限の少ない光源数で、構造物の表面の欠陥を確実に確認できるようにした。
この明度ムラの補正は、まず、欠陥のない撮影領域、例えば、舗装道路の撮影結果を構成する画素の明度を画素番号順に配列してグラフ化し、そのグラフにおいて、予め定められた特定の画素ピッチ、例えば、200画素ピッチで設定された変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定する。
【0031】
次に、明度変化点をスプライン補間したグラフ、即ち、スプライン曲線を得る。
そして、認識性の高い設定明度、例えば、256階調データであれば、100〜150の間の特定の設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正率(補正係数)とし、これを、補正データ(キャリブレーションデータ)として、撮影領域の撮影時の明度に、上記補正率を掛けた値を補正後の明度とする。
【0032】
この補正率の、補正後の明度は、設定明度の近辺に集中するようになって、明度ムラが平準化されることになる。
この結果、補正後の撮影画像の明度ムラは抑制され、欠陥に生じた陰影の認識を容易にできるようになる。
以下、実施例に基づき、本発明を具体的に説明する。
【実施例1】
【0033】
図1は、本発明の実施例1の構成を示す概念図、図2は、図1の照明手段の照明状態を示す説明図、図3は、図2の照明手段と撮影手段の位置関係を示す説明図、図4は、図2の照明領域の構成を概念的に示す平面図、図5は、図2に示した照明状態で遮光しない状態の照射領域を示す撮影画像、図6は、図5で遮光した状態の照射領域を示す撮影画像、図7は、図1に示した構造物調査装置を用いた調査方法を示すフローチャートである。
【0034】
図1〜7中、1は本発明の実施例1に係る構造物調査装置、10は構造物調査装置1のコントロールユニット、101はコントロールユニット10に含まれる制御手段、102はコントロールユニット10に含まれる撮影結果格納手段、103はコントロールユニット10に含まれる補正データ取得手段、104はコントロールユニット10に含まれる撮影結果補正手段、105はコントロールユニット10に含まれる補正結果格納手段、11は撮影手段、11aは撮影手段11の撮影中央線、12は照明手段、121〜124は照明手段12の光源、121a〜124aは光源121〜124の光軸、121bは光源121から照射される光線、1211〜1241は光源121〜124の遮光手段、13は構造物調査装置1の操作に用いられる操作端末、14はコントロールユニット10に電力を供給する電源ユニット、2は構造物、21は構造物2の表面、3は光源121〜124の照射領域の集合域、31a〜31dは照射領域の集合域3の一部を構成する主要照射領域、32aは照射領域の集合域3の一部を構成する中央境界照射領域、32b、32cは照射領域の集合域3の一部を構成する側境界照射領域である。
【0035】
まず、図1〜図6について説明する。
コントロールユニット10は、制御手段101、撮影結果格納手段102、補正データ取得手段103、撮影結果補正手段104、及び、補正結果格納手段105を有する。
制御手段101は、この構造物調査装置1を構成する要素の作動を制御する。
撮影結果格納手段102は、後述する撮影手段の撮影によって得られた撮影結果、即ち、映像や画像を格納する。
【0036】
補正データ取得手段103は、欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正するキャリブレーションデータを取得する。
このキャリブレーションデータは、欠陥のない構造物の表面の撮影結果を解析し、撮影結果中の明度の分布から明度変化点を抽出し、その抽出結果から、スプラインで補完した明度補正曲線を生成し、得られた明度補正曲線に基づいて補正率を算出することによって得られる。
【0037】
撮影結果補正手段104は、補正データ取得手段103によって得られたキャリブレーションデータ、即ち、補正率を用いて、後述する撮影手段によって得られた撮影結果を補正し、撮影結果中の明度のムラを平準化する。
補正結果格納手段105は、撮影結果補正手段104で補正された補正結果を格納する。
【0038】
撮影手段11は、制御手段101の制御に応じ、撮影領域を撮影し、撮影結果をコントロールユニット10に対して送出する。
この撮影手段11は、撮影領域となる構造物2の表面21に対し、撮影手段11の撮影領域の中央に向かう撮影中央線11aが垂直になるよう配置される。
【0039】
照明手段12は、4組の遮光手段1211〜1241を備えた光源121〜124を有し、制御手段101の制御に応じ、点灯する。
各光源121〜124の構造は同様であるので、代表して光源121について説明する。
【0040】
光源121は、内部に図示しない発光部と、集光手段とを有する。
この光源121は、集光手段のレンズによって集光された光線121bを照射する。
なお、この光線121bは、遮光手段1211による遮光が行われない状態の照射範囲を示すものである。
【0041】
図示しない発光部は、発光ダイオード(LED)である。
図示しない集光手段は、発光部から発せられる光線を、所定の範囲に収束させる図示しないレンズと、レンズから出射される光線を部分的に遮光し、その遮光量を調整可能な遮光手段を有する。
【0042】
照射領域の集合域3は、主要照射領域31a〜31d、中央境界照射領域32a、及び、側協会照射領域32b、32cからなる。
なお、この照射領域の集合域3の構成については、照明手段12の光源121〜124の配置の説明時に、併せて説明する。
【0043】
操作端末13は、例えばモニタのような表示手段と、構造物調査装置1の操作に必要な入力に使用される入力部を備えたものであり、例えば、モバイル端末が挙げられる。
この操作端末13は、コントロールユニット10に接続され、構造物調査装置1の操作に必要な操作画面を表示すると共に、撮影結果及び補正結果を表示し、さらに、ユーザからの入力に応じて、制御手段101に対して、構造物調査装置1の作動の制御に必要な指示信号を出力する。
【0044】
電源ユニット14は、コントロールユニット10に対して、構造物調査装置1の作動に必要な電力を供給する。
構造物2は、アスファルトやコンクリート製の構造物であり、例えば、道路構造物が挙げられる。
表面21は、構造物2の表面であり、例えば、道路構造物の舗装面が挙げられる。
【0045】
次に、照明手段12の配置、及び、遮光について説明する。
各照明手段121〜124は、それぞれ異なる個別の照射領域を有する。
照射領域の集合域3は、個別の照射領域の集合域であって、帯状に延び、図3に示したように、一方の端縁から順次、主要照射領域31a、側境界照射領域32b、主要照射領域31b、中央照射領域32a、主要照射領域31c、側境界照射領域32c、及び、主要照射領域31dに区分される。
【0046】
即ち、照射領域の集合域3は、撮影手段11の中央に設定される中央照射領域32aと、中央照射領域32aの両側にそれぞれ主要照射領域31b、31cを介して設定される側境界照射領域32b、32cとを境界に4分割される。
照明手段121〜124は、図2及び図3に示されるように、同一直線上に一列に配置され、図3に示されるように、光線を構造物2の表面21に対して斜めに照射する。
【0047】
そして、両側の2組照明手段121、124は、互いの光軸121a、124aが交差した後、一方の照明手段121は、中央照射領域32a、主要照射領域31c、及び、側境界照射領域32cを、また、他の一方の照明手段124は、中央照射領域32a、主要照射領域31b、及び、側境界照射領域32bが照射領域となるよう、光線の集光度と設置角度が調整される。
【0048】
また、中央の2組の照明手段122、123は、互いの光軸122a、123aが交差した後、一方の照明手段122は、側境界照射領域32b、及び、主要照射領域31aを、また、他の一方の照明手段123は、側境界照射領域32d、及び、主要照射領域31dが照射領域となるよう、光線の集光度と設置角度が調整される。
【0049】
従って、この照射領域の集合域3を構成する領域のうち、主要照射領域31a〜31dには、光源121〜124のうち、何れか1組の光源からの光線が照射され、中央境界照射領域32a、及び、側境界照射領域32b、32cには、2組の光源からの光線が重複して照射される。
【0050】
この2組の光線が重複して照射される状態は、図2に示された光線内に斜線として示した。
この重複した領域では、光線の照射の重複により、図5の白枠で示したように、明度ムラが生じる上、隣接する領域の境界が明瞭になる。
【0051】
そこで、各光源121〜124の遮光手段1211〜1241を調整し、各光源121〜124から照射される光線のうち、中央境界照射領域32a、及び、側境界照射領域32b、32cに照射される光線を、光源近傍で遮蔽し、これらの領域に達する光線を減光させる。
上記のように、遮光手段1211〜1241によって、光線の一部を遮光し、図6の白枠で示したように、明度ムラを軽減し、隣接する領域の境界を目立たなくする。
【0052】
次に、図7に基づき、上記の実施例1による構造物の調査方法について説明する。
なお、以下の説明で実行される動作は、ユーザが操作する操作端末13からの指令に基づいて実行される。
実施例1に係る構造物調査装置1を使用するときには、まず、照明手段12の設定を行う。
【0053】
即ち、照明手段12の配置及び角度を、図2、図3に示したように調整して照射領域が図4に示された配置になるようにし、遮光手段1211〜1241の遮光域を調整して、光線が重複する照射領域に達する光線を制限する(ステップS10)。
【0054】
次に、欠陥が認められないことをユーザが確認した構造物2の表面21に、照明手段12によって、構造物2の表面21を照射し(ステップS11)、撮影手段11によって、表面21上の照射領域の集合域3を撮影して、欠陥が認められない撮影結果を得て、続いて、調査対象となる領域の表面21を撮影して調査対象となる撮影結果を得る(ステップS12)。
この撮影結果は、順次、撮影結果格納手段102に格納され、撮影結果の確認や解析に利用可能に保持される(ステップS13)。
【0055】
次に、補正データ取得手段103は、撮影結果のうち、欠陥のない構造物2の表面21の撮影領域を撮影した撮影結果に基づき、キャリブレーションデータとして、その撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、その明度補正曲線に基づいて補正率を算出する(ステップS14)。
【0056】
次に、調査対象領域を撮影して得られた撮影結果の明度のムラが、キャリブレーションデータ、即ち、得られた補正率を用い平準化される(ステップS15)。
平準化された補正画像は、補正結果格納手段105に格納される(ステップS16)。
そして、補正結果格納手段105に格納された補正結果は、端末装置13を介したユーザの要求に応じて、その表示手段に表示され、ユーザによる欠陥の判断に供される(ステップS17)。
【0057】
上記の構造物調査装置1を用いてこうぞ物の表面を調査すると、必要最小限の数の光源を備えた照明手段を用いることにより、欠陥による陰影を明瞭に発生させると共に、光減数の減少に伴った撮影結果中の明度ムラを平準化させることにより、欠陥により発生した陰影を認識しやすくなる。
【実施例2】
【0058】
図8は、本発明の実施例2に係る構造物調査装置を車両に搭載した状態を示す車両の側面側説明図、図9は、図8の背面側説明図、図10は、実施例2の構造物調査装置によって得られた撮影結果の撮影明度の分布を示すグラフ、図11は、図10のグラフの明度変化点を示すグラフ、図12は、図11のグラフに示された明度変化点から作成された明度補正曲線、図13は、図12の補正曲線に基づいて算出された補正率によって補正された補正結果の補正後明度の分布を示すグラフ、図14は、補正のプロセスによって変化する画像を示す説明画像、図15は、実施例2によって得られた補正結果の画像である。
【0059】
なお、この実施例2の基本構成は、実施例1と同様であるので、相違点を中心に説明し、重複する説明は省略する。
図8〜15中、4は本発明の実施例2に係る構造物調査装置、40はコントロールユニット、41は撮影手段、41aは撮影中央線、42は照明手段、420は光源ユニット、421〜424はレンズユニット、421aは光軸、421bは光線、4211〜4241は遮光手段、43は光ファイバーケーブル、5は車両である。
【0060】
構造物調査装置4は、車両5の荷台後部に取り付けられる。
この構造物調査装置4は、実施例1の構造物調査装置1とは、照明手段42の構成が異なる。
照明手段42は、光源ユニット420、レンズユニット421〜424、遮光手段4211〜4241、及び、光ファイバーケーブル43を具備する。
光源ユニット420は、各レンズユニット421〜424に対応した、図示しない光線出射口を有する。
【0061】
また、光源ユニット420には、各レンズユニット421〜424に対応したが内蔵され、この光源は、それぞれ反射光を備える。
各光源の光線は、光源ユニット420内で反射手段によって集光され、上記の光線出射口に集光される。
【0062】
光源ユニット420の光線射出口には、それぞれ、光ファイバーケーブル43の一端が接続され、光ファイバーケーブル43の他の一端には、それぞれ、レンズユニット421〜424が接続される。
なお、光ファイバーケーブル43は、図8では1本しか記載されておらず、また、図9では省略されているが、各レンズ集光手段421〜424は、図示しない光ファイバーケーブを介して光源ユニット420に接続されるものである。
【0063】
レンズユニット421〜424は、光ファイバーケーブル43から射出される光線が所要の領域を照射し得るよう光線を収束すると共に、光線の射出方向を照射領域に向けて揃えるものである。
【0064】
撮影手段41と、レンズユニット421〜424は、図示しない取付手段を介して、それぞれの角度及び配置が、実施例1における撮影手段11と、光源121〜124と同様になるよう、車両5に取り付けられる。
そして、遮光手段4211〜4241も、実施例1のおける遮光手段1211〜1241と同様に、その照射範囲の一部を遮光するよう調整される。
【0065】
次に、実施例2に記載の構造物調査装置4を用いて、道路構造物の舗装面の欠陥の調査した場合について具体的に説明する。
なお、この調査は、夜間に行った。
まず、図8及び図9に示されるように構造物調査装置4を搭載し、照明手段42の設定がなされた車両5を道路構造物上に移動させる。
【0066】
このとき、照明の照射領域内に、目視にて欠陥がないことを確認する。
次に、照明手段42を作動させた状態で、撮影手段41にて、欠陥のない道路構造物の舗装面を撮影する。
次に、この撮影結果を構成する各画素の明度を解析し、各画素の明度を取得する。
この各画素の明度を、縦軸を256階調、横軸を画素番号にしたグラフに示したものが、図10のグラフである。
【0067】
次に、この撮影明度のグラフに示された、撮影結果の明度の分布から、明度変化点を抽出し、スプラインで補間した明度補正曲線を作成する。
本実施例において設定された明度変化点の具体例を図11に示す。
この明度変化点について、舗装面に現れるひび割れのような欠陥は、舗装面のテクスチャとして現れるため、明度変化点を細かい間隔で設定すると、欠陥の陰影を劣化させる可能性がある。
【0068】
このため、明度変化点は、大まかな光量変化のみを補正し得る程度の最低限必要な個数であることが望ましく、例えば、撮影結果が5200画素の画像である場合、まず、200画素ピッチ程度で変化点を設定した上で、さらに、図10に示した明度のグラフの変化のピークとなる山と谷の部分を変化点として補間し、これらの変化点を明度変化点とする。
【0069】
そして、この明度補正曲線に基づき、明度変化点をスプラインで補間したグラフが、図12のグラフである。
また、スプラインによる補間には、例えば、従来公知の3次スプライン関数を用いた3次スプライン補間法が用いられる。
【0070】
次に、明度補正曲線に基づいて補正率を算出する。
この補正率は、撮影結果を構成する画素の明度のムラを平準化するために用いられる。
この補正率は、各画素のスプライン曲線上の値と、設定明度によって決定される。
例えば、8ビット、0〜255までの256階調のデータの場合、最も表示が見やすい明度は、100〜150の間であるため、この明度のデータの認識性を高める補正率を採用する。
具体的には、各画素の明度補正率は、次の式によって求められる。
補正率=設定明度/各画素のスプライン曲線上の値
【0071】
本発明では、上記の補正率を用いて撮影結果の明度のムラを平準化し、補正結果を取得する。
このとき、補正後の明度は、以下の式によって求められる。
補正後の明度=撮影時の明度×(設定明度/各画素のスプライン曲線の上の値)
この補正結果の各画素の明度をグラフ示したものが、図13に示したグラフである。
【0072】
ここで、撮影結果の明度の平準化について、欠陥がない舗装面の撮影結果の明度を平準化した場合で、実際の撮影結果を用いて具体的に説明する。
なお、本来の構造物調査では、欠陥がないことが予め確認されている舗装面の撮影結果について、その明度の平準化は、実行してもしなくてもよい。
【0073】
図10に示した撮影明度を有する撮影結果は、図14の左上に示した「補正前画像」となる。
この「補正前画像」では、縦方向に沿った筋状に明暗に差があるムラが存在することがわかる。
そして、図12に示した明度補正曲線に基づいた補正率を示す補正係数の明度を反映させた画像が、図14の左下に示した「補正係数画像」である。
この場合、補正率=補正係数であり、図14は、係数値を明暗で擬似表示した画像である。
【0074】
この「補正係数画像」には、「補正前画像」で認められる明暗を反転させた明度ムラが存在する。
そして、「補正前画像」に「補正係数画像」を掛け合わせると、図14の右側に示した補正結果を示す画像となる。
この補正結果では、補正前画像に認められた縦方向のムラがなくなり、画像内の明度が平準化され、画像上で舗装面をはっきり確認できることがわかる。
【0075】
上記の実施例で、実際に舗装面の欠陥を調査する場合には、上記の通り、補正データとして補正率を取得した後、照明手段42によって舗装面を照明し、撮影手段41で、舗装面上の照明手段42の照射領域を撮影しながら、車両5を走行させて撮影結果を取得し、撮影結果をコントロールユニット40内の撮影結果格納手段に格納する。
【0076】
また、この撮影結果の取得に並行して、キャリブレーションデータ、即ち、上記の補正率を用いて撮影結果の明度のムラの平準化を実行する。
そして、この平準化によって得られた補正結果をコントロールユニット40内の補正結果格納手段に格納する。
【0077】
また、必要に応じ、この平準化の処理と並行して、平準化の処理によって得られた補正結果の画像は、図示しない操作端末の表示手段に随時表示され、ユーザが、平準化処理の状況を確認できるようになっている。
【0078】
補正結果格納手段に格納された補正結果は、明度ムラが除去された舗装面の画像として、ユーザの要求に応じて表示手段に表示され、欠陥の有無の調査に供される。
図15は、この明度ムラが除去された舗装面の画像の一部である。
図15の左側画像の黒丸で囲んだ領域の拡大画像が、図15の右側の画像である。
【0079】
この画像では、車両の走行方向、即ち、図15では、左右方向に沿った欠陥の陰影がはっきりと確認できる。
なお、上記の実施例において、欠陥の陰影が彩度の要素を含む場合では、明度ムラが除去された画像では、欠陥の陰影がさらにはっきり確認できる。
【実施例3】
【0080】
次に、図16に基づき、本発明に係る構造物調査装置を用いた実施例3の調査方法を説明する。
図16は、実施例3の調査方法を示すフローチャートである。
実施例3は、その主要構成は実施例2と同様であり、撮影開始から撮影結果の明度のムラの平準化の処理へ至るまでの工程が一部異なる。
【0081】
実施例3では、まず、実施例2と同様に、照明手段を設定し(ステップS20)、調査すべき道路構造物の舗装面に光線を照射し(ステップS21)、撮影手段によって撮影を開始し(ステップS22)、撮影結果を格納する(ステップS23)。
次に、撮影結果から、欠陥がない舗装面の撮影結果を特定する(ステップS24)。
【0082】
この欠陥がない撮影結果は、ユーザの目視により、舗装面に欠陥が認められない場所から撮影を開始するようにしておき、撮影開始時の撮影結果を欠陥がない舗装面とみなすことにより特定されるが、例えば、撮影結果を端末装置の表示手段に表示させ、その表示結果を見たユーザが、欠陥がないと思われる撮影結果の範囲を指定し、指定された撮影結果の部分を欠陥がない撮影結果に特定してもよい。
次に、撮影結果中の特定された範囲の撮影結果に基づき、実施例2と同様にキャリブレーションデータを取得する。
【0083】
次に、キャリブレーションデータの取得が完了したとき、撮影結果格納手段に格納された撮影結果を、実施例2と同様にキャリブレーションデータで補正し、補正結果を得て(ステップS26)、補正結果を格納し(ステップS27)、補正結果を表示する(ステップS28)。
【0084】
本発明は上記のように構成されるので、本発明によれば、照明手段の光源数を大幅に減少させることが可能になって、運用及び保守コストを低減させることができ、また、構造物の表面に到達する光線は、ほぼ単一の光源から照射された光線となるので、構造物の表面に発生したクラックやひび割れのような欠陥で陰影が形成されやすくなり、また、光源数の減少に伴った撮影結果の明度のムラをキャリブレーションデータに基づいて補正するので、撮影結果に含まれる陰影を確実に確認できるようになる。
【実施例4】
【0085】
次に、図17に基づき、本発明に係る構造物調査装置の実施例4の構成を説明する。
図17は、実施例4の照明手段の照明状態を示す説明図である。
なお、この実施例4の主要構成は、光源が照明ユニットに変更された構成以外は、実施例1と同様であるので、相違点を中心に説明し、重複する説明は省略する。
【0086】
図17中、61は撮影手段、61aは撮影手段61の撮影中央線、621、622は照明ユニット、621b、622bは照明ユニット621、622の光線である。
この照明ユニット621、622は、内部に図示しない光源を有し、各光源から拡散する光線を広範の領域に収束させる集光手段として、それぞれ、図示しない広角レンズを有する。
【0087】
照明ユニット621、622は、その光軸が交差しないよう配置され、一方の照明ユニット621は、撮影手段61の撮影領域の一方の端部領域から、撮影中央線61aに至る領域を照射し、他の一方の照明ユニット622は、撮影手段61の撮影領域の他の一方の端部領域から、撮影中央線61aに至る領域を照射する。
【0088】
この実施例では、各照明ユニット621、622の照明領域の重複が、撮影中央線61aの付近にのみ発生するため、光線の重複による明度ムラの発生が少なく、明度ムラの補正が容易になる。
【実施例5】
【0089】
次に、図18及び図19に基づき、本発明に係る構造物調査装置の実施例5の構成を説明する。
図18は、実施例5の照明手段の照明状態を示す正面説明図、図19は、図18の側面説明図である。
この実施例5は、実施例4の構成と撮影手段の個数、及び、照明ユニットの配置が異なるので、実施例4との相違点を中心に説明する。
また、この実施例5は、図8で示された実施例と同様に、車両の後方に取り付けられる。
【0090】
図18〜19中、711、712は撮影手段、711b、712bは撮影手段71、72の撮影領域、721、722は照明ユニット、721b、722bは照明ユニット721、722の光線である。
なお、以下の説明における前後左右のうち、左方とは、図17における左側、前方とは、図18に置ける左側を示し、同様に以下の説明における右方及び後方は、上記の方向の逆側を示すものである。
【0091】
一方の撮影手段711は、調査対象となる路面の左方の領域を撮影し、他の一方の撮影手段712は、その路面の右方の領域を撮影し得る位置であって、かつ、一方の撮影手段711の撮影領域が、他の一方の撮影手段712の撮影より前方に位置するよう配置され、各撮影手段711、712の撮影領域が重複しないよう設定される。
照明ユニット721、722は、実施例4と同様に広角レンズを備えたものである。
【0092】
一方の照明ユニット721は、前方に設けられた撮影手段711の撮影領域を、その撮影領域から離れた位置、具体的には、図18の右方から撮影領域に向けて斜め左下方向に照明する。
他の一方の照明ユニット722は、後方に設けられた撮影手段712の撮影領域を、その撮影領域から離れた位置、具体的には、図19の左方から撮影領域に向けて斜め右下方向に照射する。
【0093】
本実施例では、重複する照明領域がないため、明度ムラを抑制できるようになって、構造物の欠陥を認識し易くなり、さらに、欠陥に対して光線を鋭角に照射することができるようになって、欠陥で陰影を明瞭に発生させることが可能になる。
また、本実施例では、2台の撮影手段の撮影領域の前後方向のズレに基づき、前後方向のズレを補正して合成した画像を作成する画像処理を実施することにより、画像を目視したユーザが直感的に路面状態を把握できるようにすることが可能である。
【0094】
なお、本発明は上記の実施例に限定されるものではない。
例えば、照明手段の光源には、LED照明の他、ハロゲンランプ、メタルはライドランプ(HID)など、どのような種類の光源を使用しても良い。
また、照明手段によって照射される光線は、欠陥に対して斜めに照射され、欠陥に陰影を発生し得るものであればどのような角度であってもよいが、構造物の表面に対して40〜50度程度であれば、好適な陰影を発生させることができる。
【0095】
また、撮影手段は、撮影領域を直接撮影せずに、反射鏡を介して間接的に撮影するようにしてもよい。
また、撮影手段の撮影方向は、実施例では、撮影領域に対して垂直になるよう配置されているが、画像内の陰影の確認が困難にならなければ、垂直でなくてもよい。
【0096】
また、実施例1では、キャリブレーションデータを得るため、調査対象となる表面とは別に、欠陥がない表面を撮影したが、調査対象となる表面の撮影結果を表示手段に表示させ、ユーザが、画像中から、欠陥がないと思われる範囲や箇所を特定し、その特定された範囲等を欠陥がない表面の撮影結果とみなして、キャリブレーションデータを得るようにしてもよく、また、ユーザが目視にて欠陥がないことを確認した構造物の表面から撮影を開始し、撮影結果のうち、撮影開始時の撮影結果の箇所を欠陥がない表面の撮影結果として、キャリブレーションデータを得るようにしてもよい。
【0097】
また、キャリブレーションデータは、撮影結果の明度を平準化し得るものであればどのようなものであってもよく、必ずしも補正率を算出する必要はなく、例えば、得られた明度補正曲線を直接利用して、明度を平準化するようにしてもよい。
また、キャリブレーションデータは、照明の設定が固定されていれば、作業の都度設定し直す必要はなく、一度取得したキャリブレーションデータを再利用するようにしてもよい。
【0098】
また、実施例では、照明手段の光源の数は4組であったが、主要な照射領域が重複しないように配光できれば4組に限定されず、また、その光線の照射方向も実施例の組み合わせに限定されない。
また、撮影結果や補正結果は必要に応じて格納しなくてもよい。
【0099】
また、実施例2または3において、操作端末をノートパソコンのようなモバイル端末とし、この端末を車両の運転室に設置し、調査のために撮影を行っている間、端末の表示手段に、撮影結果及び補正結果の画像のうち、少なくともいずれか一方を表示し、ユーザが、処理の進捗状況を運転室で確認できるようにしてもよい。
【0100】
また、本発明に係る構造物調査装置の調査対象は、道路構造物に限定されず、例えば、建築構造物であってもよく、また、その表面は、舗装面、具体的には、アスファルト面やコンクリート面に限定されず、クラック様の欠陥が生じうるような表面、例えば、タイル面や塗装面でもよく、さらに、光線の照射により陰影が生じ得る欠陥が表面に発生する特性を有する材料であれば、調査対象になり得る。
【0101】
また、実施例2及び3では、本発明に係る構造物調査装置は、走行し得る車両に搭載されているが、人力で移動させ得る台車等に載せてもよく、また、構造物調査装置は固定し、調査対象を移動させるようにしてもよい。
また、中央境界照射領域と側境界照射領域の、主要照射領域に対する割合は、実施例に示したものに限定されず、例えば、両境界照射領域の割合をできるだけ低くしたり、境界照射領域が発生しないよう照明手段を設定したりしてもよい。
また、実施例5では、2台の撮影手段を採用したが、2台以上の撮影手段を用いてもよい。
さらに、本発明は、本発明の範囲内で自由に設計変更し得るものであり、上記実施例に限定されるものではない。
【産業上の利用可能性】
【0102】
本発明では、構造物の表面、特に、道路構造物の舗装面の欠陥の調査を、車両や人通りを始めとする交通が少ない夜間に実行して欠陥を確実に確認できるようになり、ユーザの利便性の向上の点で利用可能性が高い。
【符号の説明】
【0103】
1 構造物調査装置
10 コントロールユニット
101 制御手段
102 撮影結果格納手段
103 補正データ取得手段
104 撮影結果補正手段
105 補正結果格納手段
11 撮影手段
11a 撮影中央線
12 照明手段
121 光源
121a 光軸
121b 光線
1211 遮光手段
122 光源
122a 光軸
122b 光線
1221 遮光手段
123 光源
123a 光軸
123b 光線
1231 遮光手段
124 光源
124a 光軸
124b 光線
1241 遮光手段
13 操作端末
14 電源ユニット
2 構造物
21 表面
3 照射領域の集合域
31a 主要照射領域
31b 主要照射領域
31c 主要照射領域
31d 主要照射領域
32a 中央境界照射領域
32b 側境界照射領域
32c 側境界照射領域
4 構造物調査装置
40 コントロールユニット
41 撮影手段
41a 撮影中央線
42 照明手段
420 光源ユニット
421 レンズユニット
421a 光軸
421b 光線
4211 遮光手段
422 レンズユニット
4221 遮光手段
423 レンズユニット
4231 遮光手段
424 レンズユニット
4241 遮光手段
43 光ファイバーケーブル
5 車両
61 撮影手段
61a 撮影中央線
621 照明ユニット
621b 光線
622 照明ユニット
622b 光線
711 撮影手段
711a 撮影中央線
711b 撮影領域
712 撮影手段
712a 撮影中央線
712b 撮影領域
721 照明ユニット
721b 光線
722 照明ユニット
722b 光線
A 光源
B 光線
C 集光手段
D 欠陥
【特許請求の範囲】
【請求項1】
撮影して得られた撮影結果に基づいた構造物の表面の欠陥の判断に用いられる構造物調査装置において、
構造物の表面の撮影領域を照射する複数の光源を有し、各光源による光線の主要な照射領域が重複しない複数の光源を有する照明手段と、
照明手段の光源によって照射された撮影領域を撮影して撮影結果を取得し、欠陥のない構造物の表面と、調査対象となる構造物の表面とを撮影する撮影手段と、
撮影手段によって得られた撮影結果のうち、欠陥のない構造物の表面の撮影結果から、撮影結果の明度のムラを補正する補正データを取得する補正データ取得手段と、
補正データ取得手段によって得られた補正データを用いて、撮影結果のうち、構造物の表面の調査対象領域を撮影して得られた撮影結果の明度のムラを平準化する撮影結果補正手段と
を具備する上記の構造物調査装置。
【請求項2】
照明手段の各光源が、各光源から拡散する光線を、それぞれ所定の範囲に収束させる集光手段を有する請求項1に記載の構造物調査装置。
【請求項3】
照明手段の各光源の照射領域が、それぞれ、照射領域が重複しない主要照射領域と、隣接する照射領域との境界に形成され、隣接する照射領域と重複する境界照射領域とからなり、
照明手段の集光手段が、集光レンズと、遮光手段とからなり、
遮光手段は、境界照射領域に照射される光線を遮光し、境界照射領域に到達する光量を減少させる
請求項2に記載の構造物調査装置。
【請求項4】
補正データ取得手段が、
撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、得られた明度補正曲線を補正データとする
請求項1から3のいずれかに記載の構造物調査装置。
【請求項5】
補正データ取得手段が、
明度補正曲線に基づいて補正率を算出し、得られた補正率を補正データとし、
撮影結果補正手段が、
補正データ取得手段によって得られた補正率を用いて撮影結果の明度のムラを平準化する
請求項4に記載の構造物調査装置。
【請求項6】
照明手段及び撮影手段に対し、構造物の表面が相対移動し、
照明手段の光源が、移動方向に直交する方向に沿って4組配置され、
各光源の照射領域の集合域が、撮影領域の中央に、移動方向に沿って設定される中央境界照射領域と、中央境界領域の両側に中央境界照射領域と所定間隙を介して設定される側境界照射領域とを境界に4分割され、
両端の2組の光源は、互いの光源の光軸が交差した後、中央境界領域から側境界領域に至る照射領域を照射するよう、それぞれ配置され、
中央の2組の光源は、各光源の光軸が、両端の光源のうち、隣り合う光源の光軸と交差した後、側境界領域の外側の照射領域を照射するよう、それぞれ配置される
請求項1から5の何れかに記載の構造物調査装置。
【請求項7】
車両に取り付けられ、道路構造物の舗装面の欠陥を撮影する請求項1から6の何れかに記載の構造物調査装置。
【請求項8】
補正データ取得手段が、
欠陥のない構造物の表面の撮影結果を構成する画素の明度の変化をグラフ化し、そのグラフ化において、予め定められた画素ピッチで設定される変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定し、
明度変化点をスプライン補間したスプライン曲線を作成し、予め定められた設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正データとして画素毎に算出し、
撮影結果補正手段が、
撮影結果を構成する各画素の明度に、各画素に対応する補正データを掛けて撮影結果の明度ムラを平準化する
ことを特徴とする請求項1から7の何れかに記載の構造物調査装置。
【請求項9】
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面を撮影して撮影結果を取得するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、撮影結果の明度のムラを補正する補正データを取得するステップと、
光線が照射された構造物の表面の調査対象領域となる撮影領域を撮影して撮影結果を取得するステップと、
調査対象領域を撮影して得られた撮影結果の明度のムラを、補正データを用いて平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなる構造物調査方法。
【請求項10】
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面とみなし得る撮影領域を含む調査対象領域となる撮影領域を撮影するステップと、
撮影結果を格納するステップと、
撮影結果から、欠陥のない構造物の表面を撮影したとみなす撮影結果を特定するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正する補正データを取得するステップと、
補正データを用いて、格納されている撮影結果の明度のムラを平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなる構造物調査方法。
【請求項1】
撮影して得られた撮影結果に基づいた構造物の表面の欠陥の判断に用いられる構造物調査装置において、
構造物の表面の撮影領域を照射する複数の光源を有し、各光源による光線の主要な照射領域が重複しない複数の光源を有する照明手段と、
照明手段の光源によって照射された撮影領域を撮影して撮影結果を取得し、欠陥のない構造物の表面と、調査対象となる構造物の表面とを撮影する撮影手段と、
撮影手段によって得られた撮影結果のうち、欠陥のない構造物の表面の撮影結果から、撮影結果の明度のムラを補正する補正データを取得する補正データ取得手段と、
補正データ取得手段によって得られた補正データを用いて、撮影結果のうち、構造物の表面の調査対象領域を撮影して得られた撮影結果の明度のムラを平準化する撮影結果補正手段と
を具備する上記の構造物調査装置。
【請求項2】
照明手段の各光源が、各光源から拡散する光線を、それぞれ所定の範囲に収束させる集光手段を有する請求項1に記載の構造物調査装置。
【請求項3】
照明手段の各光源の照射領域が、それぞれ、照射領域が重複しない主要照射領域と、隣接する照射領域との境界に形成され、隣接する照射領域と重複する境界照射領域とからなり、
照明手段の集光手段が、集光レンズと、遮光手段とからなり、
遮光手段は、境界照射領域に照射される光線を遮光し、境界照射領域に到達する光量を減少させる
請求項2に記載の構造物調査装置。
【請求項4】
補正データ取得手段が、
撮影結果の明度の分布から明度変化点を抽出し、スプラインで補完した明度補正曲線を作成し、得られた明度補正曲線を補正データとする
請求項1から3のいずれかに記載の構造物調査装置。
【請求項5】
補正データ取得手段が、
明度補正曲線に基づいて補正率を算出し、得られた補正率を補正データとし、
撮影結果補正手段が、
補正データ取得手段によって得られた補正率を用いて撮影結果の明度のムラを平準化する
請求項4に記載の構造物調査装置。
【請求項6】
照明手段及び撮影手段に対し、構造物の表面が相対移動し、
照明手段の光源が、移動方向に直交する方向に沿って4組配置され、
各光源の照射領域の集合域が、撮影領域の中央に、移動方向に沿って設定される中央境界照射領域と、中央境界領域の両側に中央境界照射領域と所定間隙を介して設定される側境界照射領域とを境界に4分割され、
両端の2組の光源は、互いの光源の光軸が交差した後、中央境界領域から側境界領域に至る照射領域を照射するよう、それぞれ配置され、
中央の2組の光源は、各光源の光軸が、両端の光源のうち、隣り合う光源の光軸と交差した後、側境界領域の外側の照射領域を照射するよう、それぞれ配置される
請求項1から5の何れかに記載の構造物調査装置。
【請求項7】
車両に取り付けられ、道路構造物の舗装面の欠陥を撮影する請求項1から6の何れかに記載の構造物調査装置。
【請求項8】
補正データ取得手段が、
欠陥のない構造物の表面の撮影結果を構成する画素の明度の変化をグラフ化し、そのグラフ化において、予め定められた画素ピッチで設定される変化点と、グラフ上の変化のピークとなる山と谷の部分に設定された変化点とからなる明度変化点を特定し、
明度変化点をスプライン補間したスプライン曲線を作成し、予め定められた設定明度を、撮影結果を構成する各画素の位置に対応するスプライン曲線上の値で割った値を補正データとして画素毎に算出し、
撮影結果補正手段が、
撮影結果を構成する各画素の明度に、各画素に対応する補正データを掛けて撮影結果の明度ムラを平準化する
ことを特徴とする請求項1から7の何れかに記載の構造物調査装置。
【請求項9】
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面を撮影して撮影結果を取得するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、撮影結果の明度のムラを補正する補正データを取得するステップと、
光線が照射された構造物の表面の調査対象領域となる撮影領域を撮影して撮影結果を取得するステップと、
調査対象領域を撮影して得られた撮影結果の明度のムラを、補正データを用いて平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなる構造物調査方法。
【請求項10】
それぞれが有する照射領域が重複しない複数の光源によって、構造物の表面の撮影領域に光線を照射するステップと、
光線が照射された構造物の表面の撮影領域のうち、欠陥のない構造物の表面とみなし得る撮影領域を含む調査対象領域となる撮影領域を撮影するステップと、
撮影結果を格納するステップと、
撮影結果から、欠陥のない構造物の表面を撮影したとみなす撮影結果を特定するステップと、
欠陥のない構造物の表面を撮影して得られた撮影結果から、明度のムラを補正する補正データを取得するステップと、
補正データを用いて、格納されている撮影結果の明度のムラを平準化するステップと、
明度のムラが平準化された補正結果を表示するステップと
からなる構造物調査方法。
【図1】



【図2】
【図3】
【図4】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】

【図16】
【図17】
【図18】
【図19】

【図20】

【図22】
【図5】

【図6】

【図14】
【図15】
【図21】
【図23】
【図2】
【図3】
【図4】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図16】
【図17】
【図18】
【図19】
【図20】
【図22】
【図5】
【図6】
【図14】
【図15】
【図21】
【図23】
【公開番号】特開2013−96740(P2013−96740A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−237249(P2011−237249)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(501497264)西日本高速道路エンジニアリング四国株式会社 (17)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(501497264)西日本高速道路エンジニアリング四国株式会社 (17)
【Fターム(参考)】
[ Back to top ]