
標本を分類するシステムおよび方法
効率的な標本分類のための方法および装置は、容器キャリア(例えばパック)中に配置された標本容器(例えばバイアル)を含む。標本容器は(例えば1つまたはそれ以上の検査によって)処理されるべき標本を含有する。標本容器は標本の識別子を含有し、容器キャリアは識別子(例えば無線自動識別(RFID)タグ)を含有する。標本の識別子は容器キャリアの識別子と関連付けられる。その後標本容器を保持する容器キャリアは、標本容器の所望の処理に従った容器キャリアの識別子に基づいて分類される。

【発明の詳細な説明】
【技術分野】
【0001】
関連特許出願の相互参照
本出願は、米国特許出願第12/249,819号(2008年10月10日出願。参照によりその全体が本明細書に組み込まれる)に基づく優先権を主張する。
【0002】
発明の属する分野
本発明は、一般に標本(例えば医学的または他の健康関連標本)の分類に関する。より具体的には、本発明は標本の自動分類に関する。
【背景技術】
【0003】
以下の記述は読者の理解を促すために提供するものである。提供する情報および引用する文献はいずれも、本発明の先行技術であると認めるものではない。
【0004】
病院、クリニック、または他の医療施設で採取される標本は、多くの場合、遠隔地にある検査施設に送付される。そのような施設では、それらの標本について、数百または数千の異なる検査が行われうる。従って、それらの施設は日々、膨大な数の標本を受け取り、それらの標本をそれぞれ特定の試験所および/または特定の検査所に振り分ける必要がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,150,795号
【特許文献2】米国特許第4,513,522号
【特許文献3】米国特許第7,423,531号
【特許文献4】米国特許第7,308,114号
【特許文献5】米国特許第4,588,880号
【特許文献6】米国特許第4,974,166号
【特許文献7】米国特許第5,097,421号
【発明の概要】
【課題を解決するための手段】
【0006】
発明の概要
本発明は、標本を効率的に分類する方法および装置を提供する。本発明の態様によれば、標本容器(例えばバイアル)を容器キャリア(例えばパック)に配置する。標本容器は(例えば1つまたはそれ以上の検査によって)処理すべき標本を含有する。容器キャリアは識別子(例えば無線自動識別(RFID)タグ)を含む。その後、標本容器の所望の処理に従った容器キャリアの識別子に基づいて、標本容器を含有する容器キャリアを分類する。
【0007】
ある観点では、本発明は、標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させること;標本容器を含有する容器キャリアを経路に沿って搬送すること;経路上の容器キャリアの位置を検出すること;および結合したアイデンティティを用いた容器キャリアの検出に基づいて標本容器を分類することを含む方法に関する。
【0008】
本明細書で使用する「結合」とは、2つの成分を互いに結び付ける(linking)、または関連付ける(associating)ことをいう。好ましい態様では、「結合」は2つの成分を電子的に関連付け、その関連を装置またはシステムに保存することをいう。従って、「結合」は第1の成分のアイデンティティを第2の成分のアイデンティティと関連付けることを指してもよい。「結合」は、コンピュータ・コンポーネント、例えばメモリ装置(例えばRAM、ROM、フラッシュメモリ、または他の一時的もしくは恒久的メモリ装置)および/または電子化したテーブル(electronic table)、スプレッド・シート、もしくはデータベース(例えばリレーショナル・データベース)中で、2つまたはそれ以上の成分を互いに関連付けることを指してもよい。
【0009】
本明細書で使用する「アイデンティティ」とは、成分の独自性をいう。この点において、成分の「アイデンティティ」はそれを他の成分から区別するものである。
【0010】
本明細書で使用する「標本容器」とは、標本をその中に保持ことのできる任意の容器をいう。種々の態様では、標本容器にはバイアル、試験管、または他のそのような容器が含まれる。
【0011】
本明細書で使用する「容器キャリア」とは、標本容器を保持、固定、または含有できる任意の装置をいう。「容器キャリア」は標本容器を物理的に支持できるものであってもよい。「容器キャリア」は、標本容器を支持して容器キャリアおよび標本容器を搬送できるものであってもよい。
【0012】
本明細書に記載する「搬送」とは、任意の種々の方法による運搬をいう。例えば「搬送」は重力、モーター駆動式ローラー、またはコンベヤー・ベルトを用いる、ラインを介した運搬を指してもよい。「搬送」には1つまたはそれ以上の搬送法が含まれてもよい。
【0013】
本明細書で使用する「検出」とは、対象物の存在または位置を確定することをいう。また、「検出」は特定の対象物を経路上の他の対象物から区別して識別することもいう。
【0014】
本明細書で使用する「分類」とは、1つまたはそれ以上の特性に従ってアイテムを割り当てる(assigning)、割り振る(allocating)、区分する(separating)、またはグループ化(grouping)することをいう。例えば「分類」には、標本容器を、その中に含有される標本の保存に必要な温度範囲に従って区分することが含まれる。更に一例として、「分類」には、その標本容器を振り分けるべき特定の試験所または検査に従って標本容器をグループ化することも含まれる。
【0015】
ある態様では、結合は標本容器のアイデンティティと容器キャリアのアイデンティティを電子的に一致させる。
【0016】
本明細書で使用する「電子的に一致させる」とは、コンピュータ・コンポーネント、例えばメモリ装置(例えばRAM、ROM、フラッシュメモリ、または他の一時的もしくは恒久的メモリ装置)および/または電子化したテーブル、スプレッド・シート、もしくはデータベース(例えばリレーショナル・データベース)中で、2つまたはそれ以上の成分を互いに関連付けることを指す。「電子的に一致させる」とは、結合する、関連付ける、または結び付けることをいうが、必ずしもアイデンティティが同一である必要はない。
【0017】
ある態様では、複数の標本容器を搬送および分類し、各容器キャリアのアイデンティティを個別の標本容器のアイデンティティに結合させる。
【0018】
ある態様では、標本容器はその中に処理のための標本を含有する。
【0019】
本明細書で使用する「標本」とは、試験または検査を必要とする任意の生体物質または化学物質をいう。例えば「標本」は生体液(例えば血液または尿)または生体組織サンプルを含んでもよい。好ましい生体サンプルはヒトから採取したものか、またはヒト由来のものである。
【0020】
本明細書で使用する「処理」とは、標本に対して1つまたはそれ以上の試験を行うことをいう。
【0021】
ある態様では、結合はコンピュータ・システムにおいて(標本容器に適用した)標本の識別子を容器キャリアの識別子と関連付けることを含む。標本の識別子は標本容器に貼付されたバーコードであってもよい。容器キャリアの識別子は任意の識別システム、好ましくは遠隔感知できるものであってもよい。好ましい容器キャリア識別子は無線自動識別(RFID)タグである。RFIDタグは容器キャリア本体内に埋め込まれていてもよい。容器キャリアの位置の検出は、RFIDリーダーによる容器キャリアのRFIDタグの検出であってもよい。
【0022】
本明細書で使用する「関連付け」とは、例えば電子化データベースまたは他の電子化システムにおいて、2つまたはそれ以上のアイテムを関連させる、結び付ける、またはつなぎ合わせることをいう。
【0023】
本明細書で使用する「識別子」は、対象物の識別(個別識別または集団識別)を可能にする任意の特長(例えばバーコードまたは2Dバーコード)であることができる。
【0024】
本明細書で使用する「コンピュータ・システム」は、コンピュータ・システムに一般的に見られる多くのコンポーネントのいずれであってもよく、それらには、限定されるわけではないが以下がある:メモリ装置、例えばランダム・アクセス・メモリ(RAM)、読み取り専用メモリ(ROM)、フラッシュ・メモリ、恒久的メモリ、揮発性メモリ、着脱式メモリ装置、テーブル、およびデータベース。
【0025】
本明細書で使用する「RFIDタグ」は、それ自体および/またはそれと関連するアイテムを識別する無線自動識別タグであってもよい。RFIDタグは一般に、電源を持たないパッシブ・タグまたは電源を有するアクティブ・タグである。
【0026】
本明細書で使用する「埋め込まれた」とは、対象物上に位置するか、または対象物に包埋されていることをいう。
【0027】
本明細書で使用する「RFIDリーダー」は、RFIDタグと無線で通信できるように設定された装置であってもよい。一般的なRFIDリーダーは無線周波数シグナルを発信し、これはRFIDタグが視程内にあることを必要としない。
【0028】
ある態様では、搬送はラインに沿って容器キャリアをスライドさせることを含む。ある態様では、搬送はコンベアー・ベルト上での容器キャリアの運搬を含む。別の態様では、搬送は一連の動力ローラー上での容器キャリアの運搬を含む。
【0029】
ある態様では、標本容器の分類は、標本に必要とされる温度範囲に基づいて(標本容器を保持する)容器キャリアを振り分けることを含んでもよい。
【0030】
本明細書で使用する「振り分け(directing)」とは、経路を維持もしくは変更すること、経路から除去すること、または所望の位置に配置することであってもよい。
【0031】
本明細書で使用する「温度範囲」とは、一連の異なる温度であることができる。温度範囲は種々の精密度であることができる。好ましい態様では、温度範囲は冷凍(例えば約-20℃)、冷蔵(例えば約5℃)、および室温(例えば約23℃)であってもよい。他の態様では、温度範囲をより精密に分類してもよい。例えば温度範囲を5℃毎(例えば-20℃、-15℃、-10℃など)としてもよい。
【0032】
ある態様では、標本容器の分類は、標本に対して実施すべき処理に基づいて(標本容器を保持する)容器キャリアを振り分けることを含むことができる。容器キャリアの振り分けは、プランジャーを作動させて容器キャリアを経路から対応する分類済みストリップに移動させることを含んでもよい。
【0033】
本明細書で使用する「作動」とは、起動すること(activating)、動作させること(moving)、または機能させること(operating)であることができる。
【0034】
本明細書で使用する「プランジャー」とは、ピストン、シリンダー、ロッド、または作動すると実質的に軸方法に動くように設定された他の装置であることができる。
【0035】
本明細書で使用する「分類済みストリップ」とは、1つまたはそれ以上の特性に従って分類されたサンプルを含有するストリップである。ある態様では、分類済みストリップには、同じ試験所で、および/または同じ検査によって処理されるべき標本容器が含有されてもよい。
【0036】
ある態様では、方法は容器キャリアを標本容器と物理的に連結させることを更に含む。物理的連結は手動または自動式のいずれで行ってもよい。
【0037】
本明細書で使用する「物理的連結」とは、容器キャリア内、容器キャリア中、または容器キャリア上に物理的に合一して配置されることをいう。
【0038】
本明細書で使用する「手動」とは、人による介入を必要とする動作をいう。この点について、手動による物理的連結は、物理的連結を実施するオペレーターを伴ってもよい。
【0039】
本明細書で使用する「自動式」とは、人による介入をほとんど、または全く必要としない動作をいう。この点について、ロボット・システムを用いて物理的連結を行ってもよい。
【0040】
本発明の別の観点では、この方法は以下を含む:コンピュータ・システムで標本容器の識別子を容器キャリアの識別子と関連付けることによって標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させること(ここで、容器キャリアの識別子は無線自動識別(RFID)タグである);容器キャリアをコンベヤー・ベルト上で運搬することによって、標本容器を含有する容器キャリアを経路に沿って搬送すること;RFIDリーダーで容器キャリアのRFIDタグを検出することによって、経路上の容器キャリアの位置を検出すること;およびプランジャーを作動させて容器キャリアを経路から対応する分類済みストリップへ振り分けることによって、その標本に行われるべき処理に従った容器キャリアの検出に基づいて標本容器を分類すること。
【0041】
別の観点では、本発明は以下を含む分類装置を含む:標本容器を保持する容器キャリアを経路に沿って運搬するように設定された運搬装置;複数の容器キャリアのそれぞれのアイデンティティを1つの容器キャリアのアイデンティティに結合させるコンピュータ・システム(ここで、結合されたアイデンティティは電子的に一致する);運搬装置上の容器キャリアのアイデンティティを検出する1つまたはそれ以上の検出器;および、結合されたアイデンティティを用いて容器キャリア中に含有される標本容器の所望の処理に基づいて、各容器キャリアを分類ストリップに選択的に振り分けることによって標本容器を分類するように設定された1つまたはそれ以上の作動装置。
【0042】
本発明の種々の態様のこれらのまたは他の利点および特長は、以下の詳細な説明と添付の図面から明白となる。
【図面の簡単な説明】
【0043】
【図1】図1は、本発明の態様にかかる代表的な容器キャリアおよびそれに保持される標本容器を示す。
【図2】図2は、本発明の態様にかかる代表的な運搬の配置を示す。
【図3A】図3Aは、本発明のある態様にかかる分類装置を示す。
【図3B】図3Bは、本発明の別の態様にかかる分類装置を示す。
【図4A】図4Aは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【図4B】図4Bは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【図4C】図4Cは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【発明を実施するための形態】
【0044】
発明の詳細な説明
従来の工程では、施設は毎日数千個の標本を受け取りうる。サンプルはまず複数の受付人に配送され、各人がサンプルの受付処理を行う。受付人は各標本にバーコードを施与し、標本を識別するために、このバーコードをコンピュータ・システムでスキャンする。その後、受付人は検査コードおよび/または試験所コードをコンピュータ・システムに入力し、(例えば医師によって)標本について求められている検査または試験所を表示させる。
【0045】
受付人による標本の受付が完了すると、標本は大箱に入れられ、分類のために別の個人に受け取られる。分類の際は、複数の標本が手動で(一般的には複数の段階を経て)種々の群に分類される。最初の段階では、標本は、保持されなければならない温度範囲に従って分類される。温度範囲で分類されると、標本は対応する温度に制御された環境下に送られ、更なる分類が行われる(例えば検査の部門に従って分類され、次に対応する試験所に従って分類され、その後、実施すべき検査に従って分類される)。
【0046】
各分類段階において、数千個の標本のそれぞれがオペレーター(人)によって処理されなければならない。この点について、オペレーターはステーションで標本を登録し、次の段階への分類を表示するために、それぞれのステーションでバーコードをスキャンする。このように、従来の分類は大きな労働力を要し、結果としてエラーが起こりやすく、非効率的でありうる。
【0047】
効率向上のためにロボット分類システムが導入されてきた。しかし、それらのロボット・システムは非常に高価である。更に、それらのロボット・システムは空間的な制約によって、少数の分類カテゴリーに限定される。例えば一般的な施設は、標本を数百、場合によっては数千のカテゴリーに分類することを必要としうる。ロボット・アームの届く範囲は限定されており、ロボット・システムが標本を分類できるカテゴリーの数は、必要とされる数より実質的に少ない。
【0048】
米国特許第5,150,795号は、オペレーター(人)が予め割り当てられたラックに標本容器を分類する標本分類を開示している。その後、コンベヤー・システムによってラックを好適な保管場所に移動する。
【0049】
米国特許第4,513,522号は、連結部材により連結された2枚の半硬質カードを含むラベルを開示している。1枚のカードは標本容器に接着されており、他方のカードは帳面(例えば注文票)に接着されている。
【0050】
米国特許第7,423,531号は容器に印を付けるのに用いられる電子ラベルを開示している。ラベルは容器内に挿入するための無線識別要素を含む。
【0051】
米国特許第7,308,114号は、容器コードによって識別される容器のコード認識機能を有する容器運搬クレーンを容器在庫管理システムに提供する方法およびシステムを開示している。
【0052】
米国特許第4,588,880号は、そこに保持されている特定のワークピースを特徴づけるデータを含有するメモリを含む情報キャリアを開示している。
【0053】
米国特許第4,974,166号は、品目を保存、運搬、および処理するためのシステムを開示している。複数の運搬可能容器は、複数の品目の受け取りに適合する内部領域を有する。運搬可能容器が受け取る品目に関する情報の受信、分類、送信、および表示のために、データ処理装置が運搬可能容器上に提供される。
【0054】
米国特許第5,097,421号は、品目を運搬するための運搬可能容器を開示している。運搬可能容器には容器内の品目のアイデンティティ、状態、および履歴の保存に使用されるメモリが含有される。
【0055】
本発明は標本の効率的な分類のための方法および装置に関する。本発明の態様によれば、標本容器(例えばバイアル)は容器キャリア(例えばパック)中に配置される。標本容器は(例えば1つまたはそれ以上の検査によって)処理されるべき標本を含有する。容器キャリアには識別子(例えば無線自動識別(RFID)タグ)が含まれる。その後、標本容器を有する容器キャリアを、標本容器の必要とされる処理に従った容器キャリアの識別子に基づいて分類する。
【0056】
本発明の態様によれば、標本は施設で、1人またはそれ以上の受付人によって受け付けられてもよい。標本は種々の標本容器(中に標本を保持することのできる任意の容器であってもよい)に入って受け付けられてもよい。種々の態様では、標本容器はバイアル、試験管、または他のそのような容器であってもよい。
【0057】
上記のように、標本容器はその中に標本(単数または複数)を包含する。標本は任意の生体物質または化学物質であることができる。例えば標本は生体液、例えば血液もしくは尿、または生体組織サンプルであってもよい。
【0058】
受付人によって標本が受け付けられる際、各標本容器は(例えば容器キャリア内、容器キャリア中、または容器キャリア上に標本容器を配置することによって)容器キャリアと物理的に連結される。他の態様では、標本容器は、既に容器キャリア内にある状態で施設で受け取られてもよい。この点について、標準的な形状および/またはサイズの容器キャリアを使用してもよい。更に、標本容器の容器キャリアへの物理的連結は、オペレーターによって手動で行われてもよいし、例えばロボット・システムを用いて、自動で行ってもよい。
【0059】
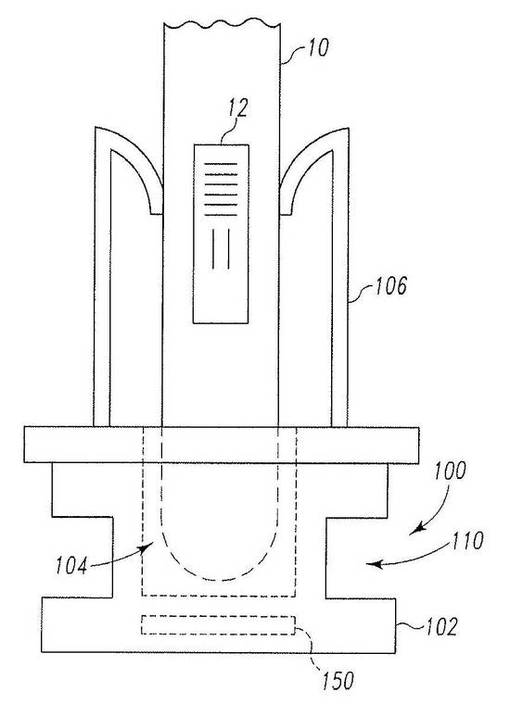
図1に、本発明の態様にかかる、その中に標本容器を有する容器キャリアの例を図示する。図1に図示する態様では、容器キャリアは本体102を有するパック100である。種々の態様では、パックは種々の設定に適したサイズであることができる。好ましい態様では、パック100は直径0.5〜1.0インチ、最も好ましくは直径0.75インチの円形の基部を有する。
【0060】
図1に示すように、パック100はパック100の上面に開口部を有する空洞104を有する。開口部および空洞104はその中に標本容器(例えば標本容器10)を受け取るような形状である。標本容器10は、本体102から上方に伸びた複数の弾性フィンガー106に支えられて、空洞104内に固定される。ある態様では、パック100は空洞104の周りに等間隔に配置された3つの弾性フィンガー106を含み、標本容器は三方から固定される。他の態様では、更なる弾性フィンガーを提供してもよい。
【0061】
図1に示すように、パック100は本体102の周囲にスロット110を有してもよい。後述するように、スロット110は分類工程において好適な位置へのパックの振り分けを容易にする。
【0062】
従って、本発明の態様によれば、それぞれのパック100はその中に1つの標本容器を有する。標本容器10をパック100中に配置すると同時に、標本容器10のアイデンティティとパック100のアイデンティティの結合が行われる。この点について、標本容器10および標本容器10を保持するパック100は互いに結び付けられる、または関連付けられる。例えば、コンピュータ・システムで標本容器10の識別子(例えばバーコード12)はパック100の識別子(例えば無線自動識別(RFID)タグ150)と電子的に関連付けられる。従って、各標本容器10のアイデンティティはパック100のアイデンティティと、一対一の関係で電子的に一致する。この点について、各パック100のアイデンティティは1つの標本容器10と関連付けられ、各標本容器10のアイデンティティは1つのパック100と関連付けられる。
【0063】
RFID技術は当業者に公知である。周知のように、RFIDタグはそれ自体、および/またはそれが関連するアイテム(例えばパック100)を識別する。RFIDタグは一般に、電源を持たないパッシブ・タグまたは電源を有するアクティブ・タグである。本発明の種々の態様では、パッシブまたはアクティブRFIDタグのいずれかを実装してもよい。
【0064】
標本容器10およびパック100のアイデンティティの結合は、種々の方法で行うことができる。ある態様では、結合は標本容器10のパック100への配置を行う受付人によって行われてもよい。これは受付人が標本容器10のバーコードをスキャンし、バーコードと関連するパック100のRFIDタグ識別子をコンピュータ・システムに入力またはインプットすることによって行ってもよい。
【0065】
別の態様では、結合は、後の時点で結合ステーションにおいて行ってもよい。この点について、受付人が標本容器10をパック100に配置した後、パック100および標本容器をRFIDリーダーおよびバーコード・リーダーのあるステーションに送ってもよい。パック100のRFIDタグ150および標本容器10のバーコード12の読み取りと同時に、コンピュータ・システム内で結合が行われてもよい。
【0066】
パック100は種々の方法で形成することができる。ある態様では、パック100の本体102は射出成型法で形成される。弾性フィンガー106は薄い金属であって、射出成型の際に本体102に形成したスロットに挿入されてもよい。
【0067】
別の態様では、パック100は1回の射出成型工程で形成される。この点について、本体102および弾性フィンガー106が共にプラスチック製であって、1回の射出成型工程で一体に形成されてもよい。
【0068】
RFIDタグ150はパック100の本体102内に埋め込まれていてもよい。他の態様では、射出成型工程で本体102の底部に開口部およびドアを形成し、この開口部からドアを通してRFIDタグ150を挿入または除去してもよい。RFIDタグ150はパック100の外面に位置してもよい。
【0069】
パック100および標本容器10のアイデンティティの結合後は、パック100のRFIDタグ150によって標本容器10を正確に追跡できる。その後、パック100および標本容器10を分類ステーションに運搬してもよい。この点について、運搬機構は、後述するように、施設の、受付人および分類装置間のレイアウトに基づいて様々でありうる。
【0070】
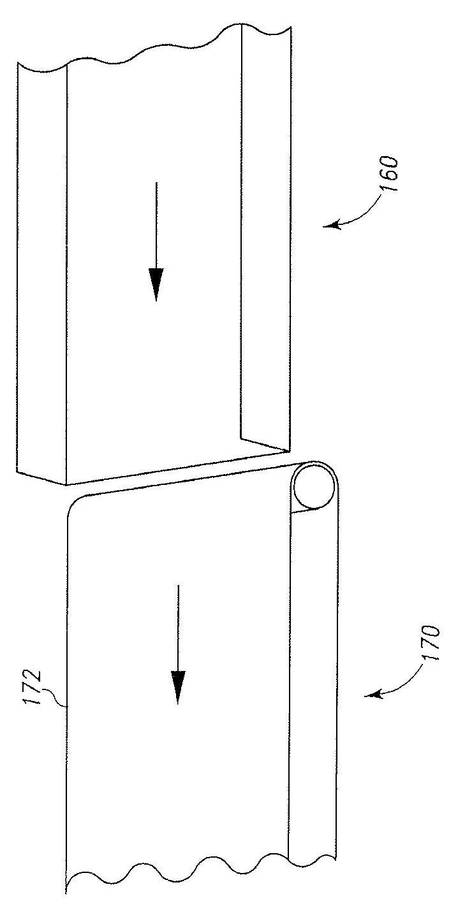
図2に、本発明の態様にかかる代表的な運搬の配置を示す。図2に示す態様によれば、運搬システムはライン160を含み、その上を標本容器10を保持するパック100をスライドさせてもよい。この点について、ライン160は、パックが下方にスライドし、重力を利用してパック100を運搬できるように設定してもよい。ある態様では、ライン160は、パック100の滑り摩擦を低減させる平滑な表面であってもよい。他の態様では、ライン160はパック100の下降運動を容易にするローラーを含んでもよい。それらのローラーおよびラインは当該分野で公知である。
【0071】
ライン160は、パック100をコンベヤー・ベルト・システム170まで運搬することによってパック100を分類装置に誘導することができる。コンベヤー・ベルト・システム170はモーター(未表示)で駆動する1つまたはそれ以上のローラー174を搭載したコンベヤー・ベルト172を有する。ある態様では、コンベヤー・ベルト・システム170の代わりに一連の動力ローラーを使用してもよい。
【0072】
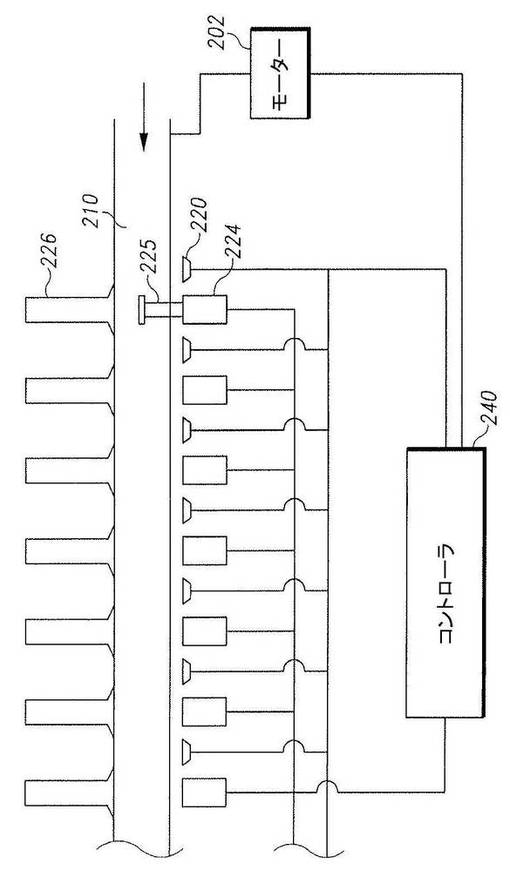
図3Aおよび3Bに本発明の態様にかかる分類装置を示す。図3Aに示すように、分類装置はパック(それぞれが標本容器を保持する)を運搬するように設定された運搬装置(例えばコンベヤー・ベルト210)を含む。コンベヤー・ベルト210はモーター202で駆動される。好ましくは、モーター202は出力調節が可能な可変モーターであって、コンベヤー・ベルトのスピードを変更することができる。
【0073】
コンベヤー・ベルト210の片側に一連の検出器(例えばRFIDリーダー220)が並置される。RFIDリーダー220は、コンベヤー・ベルト210上のパックがRFIDリーダー220の側または近傍を通過するとそのアイデンティティを検出するように設定される。各RFIDリーダー220は作動装置(例えばピストン・プッシャー装置224)と関連付けられている。プッシャー装置224にはピストン225が装備され、このピストンによって、標本容器を保持するパックはコンベヤー・ベルト210からコンベヤー・ベルトの反対側にある分離済みストリップ、スライド、またはトレイ226上に押し出される。このように、図3Aに示す態様では、各RFIDリーダー220はそれに対応するプッシャー装置224および分離済みストリップ226を有する。種々の態様では、各分離済みストリップ226は標本が処理されるべき特定の検査コードまたは試験所コードに対応する。
【0074】
分類装置200は、装置200を制御操作するコントローラ240を装備する。コントローラ240は、メモリ装置および種々の更なるコンポーネント(モニターなど)を搭載する中央処理装置(CPU)であってもよい。特定の態様では、コントローラ240は有線通信または無線通信のいずれかによって、種々のパックおよび対応する標本容器の結合に関する情報を含有するコンピュータ・システムと通信するように設定される。他の態様では、コントローラ240はコンピュータ・システムのコンポーネントである。またコントローラ240は、コンベヤー・ベルト210のモーター202を操作するように設定される。
【0075】
このように、操作において、パックがコンベヤー・ベルト210に運搬されると、種々のRFIDリーダー220がパックのRFIDタグのアイデンティティを検出できる。検出された情報はコントローラ240に伝達され、パックのアイデンティティおよび識別されたパックに結合した標本容器のアイデンティティが確認される。これによって、コントローラ240は標本と関係付けられた検査コードまたは試験所コードも確認できる。このように、コントローラ240によって、検出されたRFIDタグと関係付けられたパックがいずれの分類済みストリップ226に属するかを確認してもよい。コントローラ240は、適切なプッシャー装置224を作動させてパックを分類済みストリップ226に振り分けるように指令を出す。従って、図示する例では、RFIDリーダー220がその側を通過するRFIDタグのアイデンティティを検出し、その情報をコントローラに送信すると、これはRFIDリーダー220に関連付けられたプッシャー装置224が作動すべきか否かを示すシグナルを受信する。
【0076】
ある態様では、コンベヤー・ベルトの幅は1.0〜2インチ、長さは30〜40フィートである。特定の態様では、コンベヤー・ベルトは幅約1.5インチ、長さ約35フィートである。本明細書で使用する「約」とは、プラス・マイナス5%を意味する。プッシャー装置は約2インチ間隔で、それぞれ分離済みストリップと向かい合うように配置される。従って、わずか約35フィートのコンベヤー・ベルトで最大約200までの異なる検査コードへの分類が可能となる。
【0077】
コンベヤー・ベルトのスピードはプッシャー装置が作動するタイミングの正確さに合わせて調節することができる。ある態様では、プッシャー装置は約2ミリ秒で1回の作動を繰り返す。また、リーダーとリーダーの後の最初の作動装置の間の距離は、最初の作動装置のプッシャー装置作動のタイミングの正確さに合わせて最適化してもよい。
【0078】
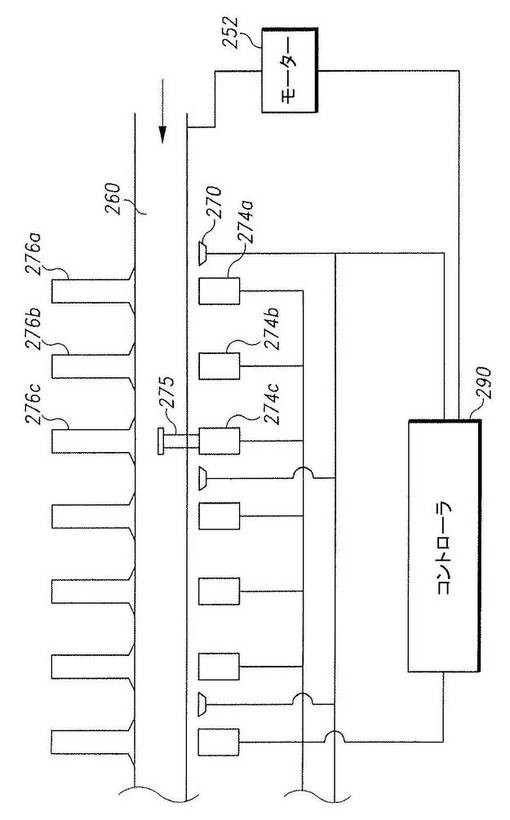
図3Aに示す態様では各RFIDリーダー220は1つのプッシャー装置224および1つの分類済みストリップ226に関連付けられているが、他の態様ではより少ないRFIDリーダーを使用してもよい。例えば図3Bに示すように、コンベヤー・ベルト260、モーター252、およびコントローラ290を装備する分類装置250は、1つのRFIDリーダー270と関連付けられた3つのプッシャー装置274a-cおよび3つの分類ストリップ276a-cを有してもよい。この点について、RFIDリーダー270によってRFIDタグが検出されると、コントローラはパックを第3の分類済みストリップ274cに振り分けるべきだと判断する。コンベヤー・ベルト260のスピードに基づいて、コントローラ290はどの時点で第3のプッシャー装置274cを作動させてパックを第3の分類済みストリップ276cに振り分けるべきかを計算できる。更に別の態様では、他のセンサーを装備して、同定されたRFIDタグの位置を検出してもよい。従って、センサーを使用してプッシャー装置274cをいつ作動させるかを決定してもよい。
【0079】
図3Bは各RFIDリーダー毎に3つの分類済みストリップを示しているが、他の態様では、任意の実用的な数のストリップが各RFIDリーダーに提供されてもよい。ある好ましい態様では、RFIDリーダーは10〜15個の分類済みストリップ毎に提供されてもよい。
【0080】
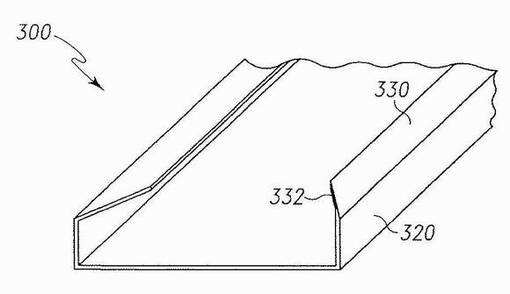
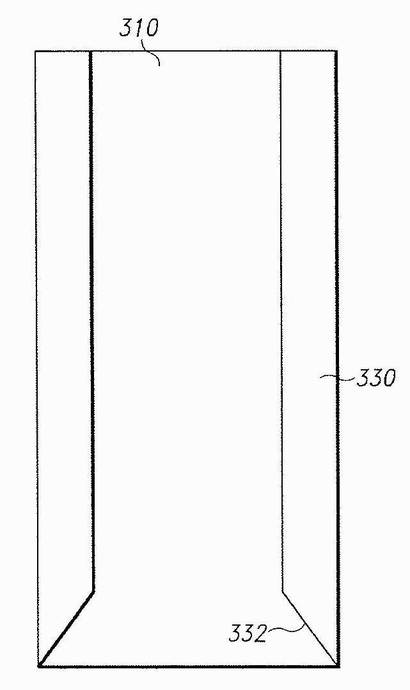
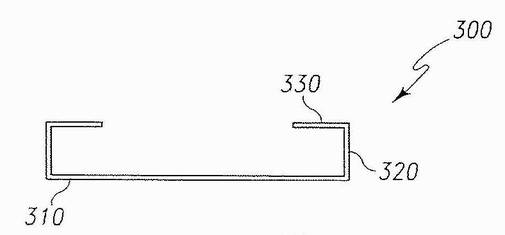
図4A−Cに、種々の観点の本発明の態様にかかる代表的な分類済みストリップを示す。代表的な分類済みストリップ300は平らな底面310およびパック(例えば図1に示すパック)に適合させた側壁320を有する。分類済みストリップ300は、側壁320の上端にパック100のスロット110(図1)にスライドして入り込むように設計されたガイド330を有する。ガイド330の前端332は先細の漏斗形になっており、これによってパックのストリップ300への挿入が容易になる。これによって、プッシャー装置がパックをコンベヤー・ベルトからストリップ上に振り分ける際に、ある程度までのポジショニングのエラーに対応することができる。
【0081】
分類済みストリップ300のサイズは任意の数のパックを収容するように調整することができる。好ましい態様では、各分類済みストリップ300は12個のパックを収容する。更に、分類済みストリップ300は好ましくは分類装置からの取り外しが可能である。この点では、分類済みストリップが満杯になると、12個ひと揃いのパックを除去し、検査機器(例えば分注装置など)に運搬する。このようにある態様では、パックおよび分類済みストリップを、分類装置および種々の検査機器と相互運用されるように設定してもよい。
【0082】
種々の態様では、分類装置は複数の閉塞または部分的に閉塞されたコンベヤー・ベルト層を含んでもよい。この点では、各層は特定の温度範囲に対応してもよい。例えば上層のコンベヤー・ベルトは室温域、中層は冷蔵域、下層は冷凍域に対応してもよい。室温域のコンベヤーは閉塞する必要はない。当然、層は任意の実用的な数であってもよい。
【0083】
このように、本発明の態様は費用効率の高い効率的な標本分類法を提供する。上記のような受付人の役割以外にも、人による処理を削減できる。受付人は標本容器の施設への受付を行い、任意の使用可能なパックに配置するだけでよい。人による分類は完全に不要となる。
【0084】
更に、本発明の態様によれば、分類は連続的に行うことができる。受付人は個々の標本容器をパックに挿入し、分類システムに乗せることができるため、トレイまたは大箱が満杯になるまで分類の開始を待つという遅延時間がない。
【0085】
更に、本発明の態様にかかるシステムは費用効率および信頼性が高いように構築または組み立てることができる。
【0086】
更に、必要とされる空間は実質的に低減される。多数の分類されたカテゴリー(例えば検査コード)を相対的に小さな空間に収容できる。既存のロボット・システムと異なり、利用できる空間によって分類カテゴリーの数が制限されることがない。更に、本発明の態様にかかるシステムは更に多くの分類されたカテゴリーに合わせて容易にスケールを変更することができる。
【0087】
特に記載しない限り、本明細書で使用する全ての技術用語および科学用語は、本発明が属する分野の当業者によって一般に理解されるのと同じ意味を有する。
【0088】
本発明について本明細書に例証的に記載したが、これは任意の要素(単数または複数)、制限(単数または複数)(本明細書には具体的に開示していない)を欠いた状態で実施してもよい。従って、例えば“含む”、“包含する”、“含有する”等の用語は広義かつ無制限に解釈すべきである。更に、本明細書で使用する用語および表現は制限ではなく説明のための用語として使用するものであり、それらの用語および表現の使用においては、表記および説明する特長の同等物またはその一部のいずれをも除外することを意図せず、認識されるように、本発明の特許請求の範囲内で種々の改変を行うことができる。
【0089】
従って、好ましい態様および更なる特長によって本発明を具体的に開示したが、当業者は本明細書において具体化した本発明の改変、改良、および変更の手段をとってもよく、それらの改変、改良、および変更は本発明の範囲内に含まれるとみなされることは理解されるべきである。本明細書に記載する物質、方法、および実施例は好ましい態様を表すもので、例証であって、本発明の範囲を制限することを意図するものではない。
【0090】
本発明について、本明細書において広範かつ一般的に記載した。包括的な開示の中に含まれるより狭い分類および亜群もそれぞれ本発明の一部を成す。これには、その属から対象物を除外する条件または負の限定付きの本発明の包括的な説明が含まれ、除外されたものが本明細書に具体的に記載されているか否かは関係がない。
【0091】
更に、本発明の特長または観点をマーカッシュ群で記載する場合、当業者に認識されるように、本発明はマーカッシュ群の任意の個別メンバーまたはメンバーのサブグループでも記述される。
【0092】
本明細書に記載する全ての文献、特許出願、特許、および他の文献は、そのそれぞれが個別で参照により組み込まれるのと同じ程度に、参照によりその全体が明確に本明細書に組み込まれる。不一致がある場合は、本明細書(定義を含む)が優先する。
【0093】
他の態様は添付の特許請求の範囲に記載される。
【技術分野】
【0001】
関連特許出願の相互参照
本出願は、米国特許出願第12/249,819号(2008年10月10日出願。参照によりその全体が本明細書に組み込まれる)に基づく優先権を主張する。
【0002】
発明の属する分野
本発明は、一般に標本(例えば医学的または他の健康関連標本)の分類に関する。より具体的には、本発明は標本の自動分類に関する。
【背景技術】
【0003】
以下の記述は読者の理解を促すために提供するものである。提供する情報および引用する文献はいずれも、本発明の先行技術であると認めるものではない。
【0004】
病院、クリニック、または他の医療施設で採取される標本は、多くの場合、遠隔地にある検査施設に送付される。そのような施設では、それらの標本について、数百または数千の異なる検査が行われうる。従って、それらの施設は日々、膨大な数の標本を受け取り、それらの標本をそれぞれ特定の試験所および/または特定の検査所に振り分ける必要がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,150,795号
【特許文献2】米国特許第4,513,522号
【特許文献3】米国特許第7,423,531号
【特許文献4】米国特許第7,308,114号
【特許文献5】米国特許第4,588,880号
【特許文献6】米国特許第4,974,166号
【特許文献7】米国特許第5,097,421号
【発明の概要】
【課題を解決するための手段】
【0006】
発明の概要
本発明は、標本を効率的に分類する方法および装置を提供する。本発明の態様によれば、標本容器(例えばバイアル)を容器キャリア(例えばパック)に配置する。標本容器は(例えば1つまたはそれ以上の検査によって)処理すべき標本を含有する。容器キャリアは識別子(例えば無線自動識別(RFID)タグ)を含む。その後、標本容器の所望の処理に従った容器キャリアの識別子に基づいて、標本容器を含有する容器キャリアを分類する。
【0007】
ある観点では、本発明は、標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させること;標本容器を含有する容器キャリアを経路に沿って搬送すること;経路上の容器キャリアの位置を検出すること;および結合したアイデンティティを用いた容器キャリアの検出に基づいて標本容器を分類することを含む方法に関する。
【0008】
本明細書で使用する「結合」とは、2つの成分を互いに結び付ける(linking)、または関連付ける(associating)ことをいう。好ましい態様では、「結合」は2つの成分を電子的に関連付け、その関連を装置またはシステムに保存することをいう。従って、「結合」は第1の成分のアイデンティティを第2の成分のアイデンティティと関連付けることを指してもよい。「結合」は、コンピュータ・コンポーネント、例えばメモリ装置(例えばRAM、ROM、フラッシュメモリ、または他の一時的もしくは恒久的メモリ装置)および/または電子化したテーブル(electronic table)、スプレッド・シート、もしくはデータベース(例えばリレーショナル・データベース)中で、2つまたはそれ以上の成分を互いに関連付けることを指してもよい。
【0009】
本明細書で使用する「アイデンティティ」とは、成分の独自性をいう。この点において、成分の「アイデンティティ」はそれを他の成分から区別するものである。
【0010】
本明細書で使用する「標本容器」とは、標本をその中に保持ことのできる任意の容器をいう。種々の態様では、標本容器にはバイアル、試験管、または他のそのような容器が含まれる。
【0011】
本明細書で使用する「容器キャリア」とは、標本容器を保持、固定、または含有できる任意の装置をいう。「容器キャリア」は標本容器を物理的に支持できるものであってもよい。「容器キャリア」は、標本容器を支持して容器キャリアおよび標本容器を搬送できるものであってもよい。
【0012】
本明細書に記載する「搬送」とは、任意の種々の方法による運搬をいう。例えば「搬送」は重力、モーター駆動式ローラー、またはコンベヤー・ベルトを用いる、ラインを介した運搬を指してもよい。「搬送」には1つまたはそれ以上の搬送法が含まれてもよい。
【0013】
本明細書で使用する「検出」とは、対象物の存在または位置を確定することをいう。また、「検出」は特定の対象物を経路上の他の対象物から区別して識別することもいう。
【0014】
本明細書で使用する「分類」とは、1つまたはそれ以上の特性に従ってアイテムを割り当てる(assigning)、割り振る(allocating)、区分する(separating)、またはグループ化(grouping)することをいう。例えば「分類」には、標本容器を、その中に含有される標本の保存に必要な温度範囲に従って区分することが含まれる。更に一例として、「分類」には、その標本容器を振り分けるべき特定の試験所または検査に従って標本容器をグループ化することも含まれる。
【0015】
ある態様では、結合は標本容器のアイデンティティと容器キャリアのアイデンティティを電子的に一致させる。
【0016】
本明細書で使用する「電子的に一致させる」とは、コンピュータ・コンポーネント、例えばメモリ装置(例えばRAM、ROM、フラッシュメモリ、または他の一時的もしくは恒久的メモリ装置)および/または電子化したテーブル、スプレッド・シート、もしくはデータベース(例えばリレーショナル・データベース)中で、2つまたはそれ以上の成分を互いに関連付けることを指す。「電子的に一致させる」とは、結合する、関連付ける、または結び付けることをいうが、必ずしもアイデンティティが同一である必要はない。
【0017】
ある態様では、複数の標本容器を搬送および分類し、各容器キャリアのアイデンティティを個別の標本容器のアイデンティティに結合させる。
【0018】
ある態様では、標本容器はその中に処理のための標本を含有する。
【0019】
本明細書で使用する「標本」とは、試験または検査を必要とする任意の生体物質または化学物質をいう。例えば「標本」は生体液(例えば血液または尿)または生体組織サンプルを含んでもよい。好ましい生体サンプルはヒトから採取したものか、またはヒト由来のものである。
【0020】
本明細書で使用する「処理」とは、標本に対して1つまたはそれ以上の試験を行うことをいう。
【0021】
ある態様では、結合はコンピュータ・システムにおいて(標本容器に適用した)標本の識別子を容器キャリアの識別子と関連付けることを含む。標本の識別子は標本容器に貼付されたバーコードであってもよい。容器キャリアの識別子は任意の識別システム、好ましくは遠隔感知できるものであってもよい。好ましい容器キャリア識別子は無線自動識別(RFID)タグである。RFIDタグは容器キャリア本体内に埋め込まれていてもよい。容器キャリアの位置の検出は、RFIDリーダーによる容器キャリアのRFIDタグの検出であってもよい。
【0022】
本明細書で使用する「関連付け」とは、例えば電子化データベースまたは他の電子化システムにおいて、2つまたはそれ以上のアイテムを関連させる、結び付ける、またはつなぎ合わせることをいう。
【0023】
本明細書で使用する「識別子」は、対象物の識別(個別識別または集団識別)を可能にする任意の特長(例えばバーコードまたは2Dバーコード)であることができる。
【0024】
本明細書で使用する「コンピュータ・システム」は、コンピュータ・システムに一般的に見られる多くのコンポーネントのいずれであってもよく、それらには、限定されるわけではないが以下がある:メモリ装置、例えばランダム・アクセス・メモリ(RAM)、読み取り専用メモリ(ROM)、フラッシュ・メモリ、恒久的メモリ、揮発性メモリ、着脱式メモリ装置、テーブル、およびデータベース。
【0025】
本明細書で使用する「RFIDタグ」は、それ自体および/またはそれと関連するアイテムを識別する無線自動識別タグであってもよい。RFIDタグは一般に、電源を持たないパッシブ・タグまたは電源を有するアクティブ・タグである。
【0026】
本明細書で使用する「埋め込まれた」とは、対象物上に位置するか、または対象物に包埋されていることをいう。
【0027】
本明細書で使用する「RFIDリーダー」は、RFIDタグと無線で通信できるように設定された装置であってもよい。一般的なRFIDリーダーは無線周波数シグナルを発信し、これはRFIDタグが視程内にあることを必要としない。
【0028】
ある態様では、搬送はラインに沿って容器キャリアをスライドさせることを含む。ある態様では、搬送はコンベアー・ベルト上での容器キャリアの運搬を含む。別の態様では、搬送は一連の動力ローラー上での容器キャリアの運搬を含む。
【0029】
ある態様では、標本容器の分類は、標本に必要とされる温度範囲に基づいて(標本容器を保持する)容器キャリアを振り分けることを含んでもよい。
【0030】
本明細書で使用する「振り分け(directing)」とは、経路を維持もしくは変更すること、経路から除去すること、または所望の位置に配置することであってもよい。
【0031】
本明細書で使用する「温度範囲」とは、一連の異なる温度であることができる。温度範囲は種々の精密度であることができる。好ましい態様では、温度範囲は冷凍(例えば約-20℃)、冷蔵(例えば約5℃)、および室温(例えば約23℃)であってもよい。他の態様では、温度範囲をより精密に分類してもよい。例えば温度範囲を5℃毎(例えば-20℃、-15℃、-10℃など)としてもよい。
【0032】
ある態様では、標本容器の分類は、標本に対して実施すべき処理に基づいて(標本容器を保持する)容器キャリアを振り分けることを含むことができる。容器キャリアの振り分けは、プランジャーを作動させて容器キャリアを経路から対応する分類済みストリップに移動させることを含んでもよい。
【0033】
本明細書で使用する「作動」とは、起動すること(activating)、動作させること(moving)、または機能させること(operating)であることができる。
【0034】
本明細書で使用する「プランジャー」とは、ピストン、シリンダー、ロッド、または作動すると実質的に軸方法に動くように設定された他の装置であることができる。
【0035】
本明細書で使用する「分類済みストリップ」とは、1つまたはそれ以上の特性に従って分類されたサンプルを含有するストリップである。ある態様では、分類済みストリップには、同じ試験所で、および/または同じ検査によって処理されるべき標本容器が含有されてもよい。
【0036】
ある態様では、方法は容器キャリアを標本容器と物理的に連結させることを更に含む。物理的連結は手動または自動式のいずれで行ってもよい。
【0037】
本明細書で使用する「物理的連結」とは、容器キャリア内、容器キャリア中、または容器キャリア上に物理的に合一して配置されることをいう。
【0038】
本明細書で使用する「手動」とは、人による介入を必要とする動作をいう。この点について、手動による物理的連結は、物理的連結を実施するオペレーターを伴ってもよい。
【0039】
本明細書で使用する「自動式」とは、人による介入をほとんど、または全く必要としない動作をいう。この点について、ロボット・システムを用いて物理的連結を行ってもよい。
【0040】
本発明の別の観点では、この方法は以下を含む:コンピュータ・システムで標本容器の識別子を容器キャリアの識別子と関連付けることによって標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させること(ここで、容器キャリアの識別子は無線自動識別(RFID)タグである);容器キャリアをコンベヤー・ベルト上で運搬することによって、標本容器を含有する容器キャリアを経路に沿って搬送すること;RFIDリーダーで容器キャリアのRFIDタグを検出することによって、経路上の容器キャリアの位置を検出すること;およびプランジャーを作動させて容器キャリアを経路から対応する分類済みストリップへ振り分けることによって、その標本に行われるべき処理に従った容器キャリアの検出に基づいて標本容器を分類すること。
【0041】
別の観点では、本発明は以下を含む分類装置を含む:標本容器を保持する容器キャリアを経路に沿って運搬するように設定された運搬装置;複数の容器キャリアのそれぞれのアイデンティティを1つの容器キャリアのアイデンティティに結合させるコンピュータ・システム(ここで、結合されたアイデンティティは電子的に一致する);運搬装置上の容器キャリアのアイデンティティを検出する1つまたはそれ以上の検出器;および、結合されたアイデンティティを用いて容器キャリア中に含有される標本容器の所望の処理に基づいて、各容器キャリアを分類ストリップに選択的に振り分けることによって標本容器を分類するように設定された1つまたはそれ以上の作動装置。
【0042】
本発明の種々の態様のこれらのまたは他の利点および特長は、以下の詳細な説明と添付の図面から明白となる。
【図面の簡単な説明】
【0043】
【図1】図1は、本発明の態様にかかる代表的な容器キャリアおよびそれに保持される標本容器を示す。
【図2】図2は、本発明の態様にかかる代表的な運搬の配置を示す。
【図3A】図3Aは、本発明のある態様にかかる分類装置を示す。
【図3B】図3Bは、本発明の別の態様にかかる分類装置を示す。
【図4A】図4Aは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【図4B】図4Bは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【図4C】図4Cは、種々の角度から見た本発明の態様にかかる分類済みストリップを示す。
【発明を実施するための形態】
【0044】
発明の詳細な説明
従来の工程では、施設は毎日数千個の標本を受け取りうる。サンプルはまず複数の受付人に配送され、各人がサンプルの受付処理を行う。受付人は各標本にバーコードを施与し、標本を識別するために、このバーコードをコンピュータ・システムでスキャンする。その後、受付人は検査コードおよび/または試験所コードをコンピュータ・システムに入力し、(例えば医師によって)標本について求められている検査または試験所を表示させる。
【0045】
受付人による標本の受付が完了すると、標本は大箱に入れられ、分類のために別の個人に受け取られる。分類の際は、複数の標本が手動で(一般的には複数の段階を経て)種々の群に分類される。最初の段階では、標本は、保持されなければならない温度範囲に従って分類される。温度範囲で分類されると、標本は対応する温度に制御された環境下に送られ、更なる分類が行われる(例えば検査の部門に従って分類され、次に対応する試験所に従って分類され、その後、実施すべき検査に従って分類される)。
【0046】
各分類段階において、数千個の標本のそれぞれがオペレーター(人)によって処理されなければならない。この点について、オペレーターはステーションで標本を登録し、次の段階への分類を表示するために、それぞれのステーションでバーコードをスキャンする。このように、従来の分類は大きな労働力を要し、結果としてエラーが起こりやすく、非効率的でありうる。
【0047】
効率向上のためにロボット分類システムが導入されてきた。しかし、それらのロボット・システムは非常に高価である。更に、それらのロボット・システムは空間的な制約によって、少数の分類カテゴリーに限定される。例えば一般的な施設は、標本を数百、場合によっては数千のカテゴリーに分類することを必要としうる。ロボット・アームの届く範囲は限定されており、ロボット・システムが標本を分類できるカテゴリーの数は、必要とされる数より実質的に少ない。
【0048】
米国特許第5,150,795号は、オペレーター(人)が予め割り当てられたラックに標本容器を分類する標本分類を開示している。その後、コンベヤー・システムによってラックを好適な保管場所に移動する。
【0049】
米国特許第4,513,522号は、連結部材により連結された2枚の半硬質カードを含むラベルを開示している。1枚のカードは標本容器に接着されており、他方のカードは帳面(例えば注文票)に接着されている。
【0050】
米国特許第7,423,531号は容器に印を付けるのに用いられる電子ラベルを開示している。ラベルは容器内に挿入するための無線識別要素を含む。
【0051】
米国特許第7,308,114号は、容器コードによって識別される容器のコード認識機能を有する容器運搬クレーンを容器在庫管理システムに提供する方法およびシステムを開示している。
【0052】
米国特許第4,588,880号は、そこに保持されている特定のワークピースを特徴づけるデータを含有するメモリを含む情報キャリアを開示している。
【0053】
米国特許第4,974,166号は、品目を保存、運搬、および処理するためのシステムを開示している。複数の運搬可能容器は、複数の品目の受け取りに適合する内部領域を有する。運搬可能容器が受け取る品目に関する情報の受信、分類、送信、および表示のために、データ処理装置が運搬可能容器上に提供される。
【0054】
米国特許第5,097,421号は、品目を運搬するための運搬可能容器を開示している。運搬可能容器には容器内の品目のアイデンティティ、状態、および履歴の保存に使用されるメモリが含有される。
【0055】
本発明は標本の効率的な分類のための方法および装置に関する。本発明の態様によれば、標本容器(例えばバイアル)は容器キャリア(例えばパック)中に配置される。標本容器は(例えば1つまたはそれ以上の検査によって)処理されるべき標本を含有する。容器キャリアには識別子(例えば無線自動識別(RFID)タグ)が含まれる。その後、標本容器を有する容器キャリアを、標本容器の必要とされる処理に従った容器キャリアの識別子に基づいて分類する。
【0056】
本発明の態様によれば、標本は施設で、1人またはそれ以上の受付人によって受け付けられてもよい。標本は種々の標本容器(中に標本を保持することのできる任意の容器であってもよい)に入って受け付けられてもよい。種々の態様では、標本容器はバイアル、試験管、または他のそのような容器であってもよい。
【0057】
上記のように、標本容器はその中に標本(単数または複数)を包含する。標本は任意の生体物質または化学物質であることができる。例えば標本は生体液、例えば血液もしくは尿、または生体組織サンプルであってもよい。
【0058】
受付人によって標本が受け付けられる際、各標本容器は(例えば容器キャリア内、容器キャリア中、または容器キャリア上に標本容器を配置することによって)容器キャリアと物理的に連結される。他の態様では、標本容器は、既に容器キャリア内にある状態で施設で受け取られてもよい。この点について、標準的な形状および/またはサイズの容器キャリアを使用してもよい。更に、標本容器の容器キャリアへの物理的連結は、オペレーターによって手動で行われてもよいし、例えばロボット・システムを用いて、自動で行ってもよい。
【0059】
図1に、本発明の態様にかかる、その中に標本容器を有する容器キャリアの例を図示する。図1に図示する態様では、容器キャリアは本体102を有するパック100である。種々の態様では、パックは種々の設定に適したサイズであることができる。好ましい態様では、パック100は直径0.5〜1.0インチ、最も好ましくは直径0.75インチの円形の基部を有する。
【0060】
図1に示すように、パック100はパック100の上面に開口部を有する空洞104を有する。開口部および空洞104はその中に標本容器(例えば標本容器10)を受け取るような形状である。標本容器10は、本体102から上方に伸びた複数の弾性フィンガー106に支えられて、空洞104内に固定される。ある態様では、パック100は空洞104の周りに等間隔に配置された3つの弾性フィンガー106を含み、標本容器は三方から固定される。他の態様では、更なる弾性フィンガーを提供してもよい。
【0061】
図1に示すように、パック100は本体102の周囲にスロット110を有してもよい。後述するように、スロット110は分類工程において好適な位置へのパックの振り分けを容易にする。
【0062】
従って、本発明の態様によれば、それぞれのパック100はその中に1つの標本容器を有する。標本容器10をパック100中に配置すると同時に、標本容器10のアイデンティティとパック100のアイデンティティの結合が行われる。この点について、標本容器10および標本容器10を保持するパック100は互いに結び付けられる、または関連付けられる。例えば、コンピュータ・システムで標本容器10の識別子(例えばバーコード12)はパック100の識別子(例えば無線自動識別(RFID)タグ150)と電子的に関連付けられる。従って、各標本容器10のアイデンティティはパック100のアイデンティティと、一対一の関係で電子的に一致する。この点について、各パック100のアイデンティティは1つの標本容器10と関連付けられ、各標本容器10のアイデンティティは1つのパック100と関連付けられる。
【0063】
RFID技術は当業者に公知である。周知のように、RFIDタグはそれ自体、および/またはそれが関連するアイテム(例えばパック100)を識別する。RFIDタグは一般に、電源を持たないパッシブ・タグまたは電源を有するアクティブ・タグである。本発明の種々の態様では、パッシブまたはアクティブRFIDタグのいずれかを実装してもよい。
【0064】
標本容器10およびパック100のアイデンティティの結合は、種々の方法で行うことができる。ある態様では、結合は標本容器10のパック100への配置を行う受付人によって行われてもよい。これは受付人が標本容器10のバーコードをスキャンし、バーコードと関連するパック100のRFIDタグ識別子をコンピュータ・システムに入力またはインプットすることによって行ってもよい。
【0065】
別の態様では、結合は、後の時点で結合ステーションにおいて行ってもよい。この点について、受付人が標本容器10をパック100に配置した後、パック100および標本容器をRFIDリーダーおよびバーコード・リーダーのあるステーションに送ってもよい。パック100のRFIDタグ150および標本容器10のバーコード12の読み取りと同時に、コンピュータ・システム内で結合が行われてもよい。
【0066】
パック100は種々の方法で形成することができる。ある態様では、パック100の本体102は射出成型法で形成される。弾性フィンガー106は薄い金属であって、射出成型の際に本体102に形成したスロットに挿入されてもよい。
【0067】
別の態様では、パック100は1回の射出成型工程で形成される。この点について、本体102および弾性フィンガー106が共にプラスチック製であって、1回の射出成型工程で一体に形成されてもよい。
【0068】
RFIDタグ150はパック100の本体102内に埋め込まれていてもよい。他の態様では、射出成型工程で本体102の底部に開口部およびドアを形成し、この開口部からドアを通してRFIDタグ150を挿入または除去してもよい。RFIDタグ150はパック100の外面に位置してもよい。
【0069】
パック100および標本容器10のアイデンティティの結合後は、パック100のRFIDタグ150によって標本容器10を正確に追跡できる。その後、パック100および標本容器10を分類ステーションに運搬してもよい。この点について、運搬機構は、後述するように、施設の、受付人および分類装置間のレイアウトに基づいて様々でありうる。
【0070】
図2に、本発明の態様にかかる代表的な運搬の配置を示す。図2に示す態様によれば、運搬システムはライン160を含み、その上を標本容器10を保持するパック100をスライドさせてもよい。この点について、ライン160は、パックが下方にスライドし、重力を利用してパック100を運搬できるように設定してもよい。ある態様では、ライン160は、パック100の滑り摩擦を低減させる平滑な表面であってもよい。他の態様では、ライン160はパック100の下降運動を容易にするローラーを含んでもよい。それらのローラーおよびラインは当該分野で公知である。
【0071】
ライン160は、パック100をコンベヤー・ベルト・システム170まで運搬することによってパック100を分類装置に誘導することができる。コンベヤー・ベルト・システム170はモーター(未表示)で駆動する1つまたはそれ以上のローラー174を搭載したコンベヤー・ベルト172を有する。ある態様では、コンベヤー・ベルト・システム170の代わりに一連の動力ローラーを使用してもよい。
【0072】
図3Aおよび3Bに本発明の態様にかかる分類装置を示す。図3Aに示すように、分類装置はパック(それぞれが標本容器を保持する)を運搬するように設定された運搬装置(例えばコンベヤー・ベルト210)を含む。コンベヤー・ベルト210はモーター202で駆動される。好ましくは、モーター202は出力調節が可能な可変モーターであって、コンベヤー・ベルトのスピードを変更することができる。
【0073】
コンベヤー・ベルト210の片側に一連の検出器(例えばRFIDリーダー220)が並置される。RFIDリーダー220は、コンベヤー・ベルト210上のパックがRFIDリーダー220の側または近傍を通過するとそのアイデンティティを検出するように設定される。各RFIDリーダー220は作動装置(例えばピストン・プッシャー装置224)と関連付けられている。プッシャー装置224にはピストン225が装備され、このピストンによって、標本容器を保持するパックはコンベヤー・ベルト210からコンベヤー・ベルトの反対側にある分離済みストリップ、スライド、またはトレイ226上に押し出される。このように、図3Aに示す態様では、各RFIDリーダー220はそれに対応するプッシャー装置224および分離済みストリップ226を有する。種々の態様では、各分離済みストリップ226は標本が処理されるべき特定の検査コードまたは試験所コードに対応する。
【0074】
分類装置200は、装置200を制御操作するコントローラ240を装備する。コントローラ240は、メモリ装置および種々の更なるコンポーネント(モニターなど)を搭載する中央処理装置(CPU)であってもよい。特定の態様では、コントローラ240は有線通信または無線通信のいずれかによって、種々のパックおよび対応する標本容器の結合に関する情報を含有するコンピュータ・システムと通信するように設定される。他の態様では、コントローラ240はコンピュータ・システムのコンポーネントである。またコントローラ240は、コンベヤー・ベルト210のモーター202を操作するように設定される。
【0075】
このように、操作において、パックがコンベヤー・ベルト210に運搬されると、種々のRFIDリーダー220がパックのRFIDタグのアイデンティティを検出できる。検出された情報はコントローラ240に伝達され、パックのアイデンティティおよび識別されたパックに結合した標本容器のアイデンティティが確認される。これによって、コントローラ240は標本と関係付けられた検査コードまたは試験所コードも確認できる。このように、コントローラ240によって、検出されたRFIDタグと関係付けられたパックがいずれの分類済みストリップ226に属するかを確認してもよい。コントローラ240は、適切なプッシャー装置224を作動させてパックを分類済みストリップ226に振り分けるように指令を出す。従って、図示する例では、RFIDリーダー220がその側を通過するRFIDタグのアイデンティティを検出し、その情報をコントローラに送信すると、これはRFIDリーダー220に関連付けられたプッシャー装置224が作動すべきか否かを示すシグナルを受信する。
【0076】
ある態様では、コンベヤー・ベルトの幅は1.0〜2インチ、長さは30〜40フィートである。特定の態様では、コンベヤー・ベルトは幅約1.5インチ、長さ約35フィートである。本明細書で使用する「約」とは、プラス・マイナス5%を意味する。プッシャー装置は約2インチ間隔で、それぞれ分離済みストリップと向かい合うように配置される。従って、わずか約35フィートのコンベヤー・ベルトで最大約200までの異なる検査コードへの分類が可能となる。
【0077】
コンベヤー・ベルトのスピードはプッシャー装置が作動するタイミングの正確さに合わせて調節することができる。ある態様では、プッシャー装置は約2ミリ秒で1回の作動を繰り返す。また、リーダーとリーダーの後の最初の作動装置の間の距離は、最初の作動装置のプッシャー装置作動のタイミングの正確さに合わせて最適化してもよい。
【0078】
図3Aに示す態様では各RFIDリーダー220は1つのプッシャー装置224および1つの分類済みストリップ226に関連付けられているが、他の態様ではより少ないRFIDリーダーを使用してもよい。例えば図3Bに示すように、コンベヤー・ベルト260、モーター252、およびコントローラ290を装備する分類装置250は、1つのRFIDリーダー270と関連付けられた3つのプッシャー装置274a-cおよび3つの分類ストリップ276a-cを有してもよい。この点について、RFIDリーダー270によってRFIDタグが検出されると、コントローラはパックを第3の分類済みストリップ274cに振り分けるべきだと判断する。コンベヤー・ベルト260のスピードに基づいて、コントローラ290はどの時点で第3のプッシャー装置274cを作動させてパックを第3の分類済みストリップ276cに振り分けるべきかを計算できる。更に別の態様では、他のセンサーを装備して、同定されたRFIDタグの位置を検出してもよい。従って、センサーを使用してプッシャー装置274cをいつ作動させるかを決定してもよい。
【0079】
図3Bは各RFIDリーダー毎に3つの分類済みストリップを示しているが、他の態様では、任意の実用的な数のストリップが各RFIDリーダーに提供されてもよい。ある好ましい態様では、RFIDリーダーは10〜15個の分類済みストリップ毎に提供されてもよい。
【0080】
図4A−Cに、種々の観点の本発明の態様にかかる代表的な分類済みストリップを示す。代表的な分類済みストリップ300は平らな底面310およびパック(例えば図1に示すパック)に適合させた側壁320を有する。分類済みストリップ300は、側壁320の上端にパック100のスロット110(図1)にスライドして入り込むように設計されたガイド330を有する。ガイド330の前端332は先細の漏斗形になっており、これによってパックのストリップ300への挿入が容易になる。これによって、プッシャー装置がパックをコンベヤー・ベルトからストリップ上に振り分ける際に、ある程度までのポジショニングのエラーに対応することができる。
【0081】
分類済みストリップ300のサイズは任意の数のパックを収容するように調整することができる。好ましい態様では、各分類済みストリップ300は12個のパックを収容する。更に、分類済みストリップ300は好ましくは分類装置からの取り外しが可能である。この点では、分類済みストリップが満杯になると、12個ひと揃いのパックを除去し、検査機器(例えば分注装置など)に運搬する。このようにある態様では、パックおよび分類済みストリップを、分類装置および種々の検査機器と相互運用されるように設定してもよい。
【0082】
種々の態様では、分類装置は複数の閉塞または部分的に閉塞されたコンベヤー・ベルト層を含んでもよい。この点では、各層は特定の温度範囲に対応してもよい。例えば上層のコンベヤー・ベルトは室温域、中層は冷蔵域、下層は冷凍域に対応してもよい。室温域のコンベヤーは閉塞する必要はない。当然、層は任意の実用的な数であってもよい。
【0083】
このように、本発明の態様は費用効率の高い効率的な標本分類法を提供する。上記のような受付人の役割以外にも、人による処理を削減できる。受付人は標本容器の施設への受付を行い、任意の使用可能なパックに配置するだけでよい。人による分類は完全に不要となる。
【0084】
更に、本発明の態様によれば、分類は連続的に行うことができる。受付人は個々の標本容器をパックに挿入し、分類システムに乗せることができるため、トレイまたは大箱が満杯になるまで分類の開始を待つという遅延時間がない。
【0085】
更に、本発明の態様にかかるシステムは費用効率および信頼性が高いように構築または組み立てることができる。
【0086】
更に、必要とされる空間は実質的に低減される。多数の分類されたカテゴリー(例えば検査コード)を相対的に小さな空間に収容できる。既存のロボット・システムと異なり、利用できる空間によって分類カテゴリーの数が制限されることがない。更に、本発明の態様にかかるシステムは更に多くの分類されたカテゴリーに合わせて容易にスケールを変更することができる。
【0087】
特に記載しない限り、本明細書で使用する全ての技術用語および科学用語は、本発明が属する分野の当業者によって一般に理解されるのと同じ意味を有する。
【0088】
本発明について本明細書に例証的に記載したが、これは任意の要素(単数または複数)、制限(単数または複数)(本明細書には具体的に開示していない)を欠いた状態で実施してもよい。従って、例えば“含む”、“包含する”、“含有する”等の用語は広義かつ無制限に解釈すべきである。更に、本明細書で使用する用語および表現は制限ではなく説明のための用語として使用するものであり、それらの用語および表現の使用においては、表記および説明する特長の同等物またはその一部のいずれをも除外することを意図せず、認識されるように、本発明の特許請求の範囲内で種々の改変を行うことができる。
【0089】
従って、好ましい態様および更なる特長によって本発明を具体的に開示したが、当業者は本明細書において具体化した本発明の改変、改良、および変更の手段をとってもよく、それらの改変、改良、および変更は本発明の範囲内に含まれるとみなされることは理解されるべきである。本明細書に記載する物質、方法、および実施例は好ましい態様を表すもので、例証であって、本発明の範囲を制限することを意図するものではない。
【0090】
本発明について、本明細書において広範かつ一般的に記載した。包括的な開示の中に含まれるより狭い分類および亜群もそれぞれ本発明の一部を成す。これには、その属から対象物を除外する条件または負の限定付きの本発明の包括的な説明が含まれ、除外されたものが本明細書に具体的に記載されているか否かは関係がない。
【0091】
更に、本発明の特長または観点をマーカッシュ群で記載する場合、当業者に認識されるように、本発明はマーカッシュ群の任意の個別メンバーまたはメンバーのサブグループでも記述される。
【0092】
本明細書に記載する全ての文献、特許出願、特許、および他の文献は、そのそれぞれが個別で参照により組み込まれるのと同じ程度に、参照によりその全体が明確に本明細書に組み込まれる。不一致がある場合は、本明細書(定義を含む)が優先する。
【0093】
他の態様は添付の特許請求の範囲に記載される。
【特許請求の範囲】
【請求項1】
標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させ;
標本容器を保持する容器キャリアを経路に沿って搬送し;
経路上の容器キャリアの位置を検出し;そして
結合したアイデンティティを用いる容器キャリアの検出に基づいて標本容器を分類する、
の各工程を含む方法。
【請求項2】
結合が標本容器のアイデンティティと容器キャリアのアイデンティティを電子的に一致させる、請求項1記載の方法。
【請求項3】
複数の標本容器が搬送および分類され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項1または2記載の方法。
【請求項4】
標本容器がその中に処理用の標本を包含する、請求項1から3のいずれかに記載の方法。
【請求項5】
標本が生体液または生体組織である、請求項4記載の方法。
【請求項6】
処理が標本に1つまたはそれ以上の検査を実施することを含む、請求項4記載の方法。
【請求項7】
結合が、コンピュータ・システムにおいて標本容器の識別子を容器キャリアの識別子と関連付けることを含む、請求項1から6のいずれかに記載の方法。
【請求項8】
標本容器の識別子がバーコードを含む、請求項7記載の方法。
【請求項9】
容器キャリアの識別子が無線自動識別(RFID)タグを含む、請求項7記載の方法。
【請求項10】
RFIDタグが容器キャリアの本体に貼付される、請求項9記載の方法。
【請求項11】
容器キャリアの位置の検出が、RFIDリーダーにより容器キャリアのRFIDタグを検出することを含む、請求項9記載の方法。
【請求項12】
搬送が、容器キャリアをラインに沿ってスライドさせることを含む、請求項1から11のいずれかに記載の方法。
【請求項13】
搬送が、コンベアー・ベルト上で容器キャリアを運搬することを更に含む、請求項12記載の方法。
【請求項14】
搬送が、コンベアー・ベルト上で容器キャリアを運搬することを含む、請求項1から13のいずれかに記載の方法。
【請求項15】
搬送が、一連の動力ローラー上で容器キャリアを運搬することを含む、請求項1から14のいずれかに記載の方法。
【請求項16】
標本容器の分類が、容器キャリアを標本に必要とされる温度範囲に基づいて振り分けることを含む、請求項1から15のいずれかに記載の方法。
【請求項17】
標本容器の分類が、標本に行われるべき処理に基づいて容器キャリアを振り分けることを含む、請求項16記載の方法。
【請求項18】
標本容器の分類が標本に行われるべき処理に基づいて容器キャリアを振り分けることを含む、請求項1から17のいずれかに記載の方法。
【請求項19】
容器キャリアの振り分けが、プランジャーを作動させて容器キャリアを経路から分類済みストリップに移動させることを含む、請求項18記載の方法。
【請求項20】
容器キャリアを標本容器と物理的に連結させることを更に含む、請求項1から19のいずれかに記載の方法。
【請求項21】
物理的連結を手動で行う、請求項20記載の方法。
【請求項22】
物理的連結を自動で行う、請求項20記載の方法。
【請求項23】
コンピュータ・システムにおいて標本容器の識別子を容器キャリアの識別子と関連付けることにより、標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させ、ここで、容器キャリアの識別子は無線自動識別(RFID)タグであり;
容器キャリアをコンベヤーベルト上で運搬することによって、標本容器を含有する容器キャリアを経路に沿って搬送し;
RFIDリーダーで容器キャリアのRFIDタグを検出することによって、経路上の容器キャリアの位置を検出し;そして、
プランジャーを作動させて容器キャリアを経路から対応する分類済みストリップへ振り分けることによって、容器キャリアの検出に基づいて標本に行われるべき処理に従って標本容器を分類する、
の各工程を含む方法。
【請求項24】
複数の標本容器が搬送および分類され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項23記載の方法。
【請求項25】
容器キャリアを標本容器に物理的に連結させることを更に含む、請求項23または24記載の方法。
【請求項26】
複数の容器キャリアを経路に沿って運搬するように設定された運搬装置であって、ここで、各容器キャリアはその中に標本容器を保持しており;
複数の容器キャリアのそれぞれのアイデンティティを容器キャリアのアイデンティティに結合させるコンピュータ・システム;
運搬装置上の容器キャリアのアイデンティティを検出する1つまたはそれ以上の検出器;および、
結合されたアイデンティティを用いて、容器キャリア中に含有される標本容器の所望の処理に基づいて各容器キャリアを分類ストリップに選択的に振り分けることによって標本容器を分類するように設定された1つまたはそれ以上の作動装置
を含む分類装置。
【請求項27】
結合されたアイデンティティが電子的に一致する、請求項26記載の分類装置。
【請求項28】
運搬装置が複数の標本容器を運搬するように設定され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項26または27記載の分類装置。
【請求項29】
標本容器がその中に処理用の標本を含有する、請求項26から28のいずれかに記載の分類装置。
【請求項30】
標本が生体液または生体組織である、請求項29記載の分類装置。
【請求項31】
処理が標本に1つまたはそれ以上の検査を実施することを含む、請求項29記載の分類装置。
【請求項32】
標本容器の識別子が容器キャリアの識別子と関連付けられる、請求項26から31のいずれかに記載の分類装置。
【請求項33】
標本容器の識別子がバーコードを含む、請求項32記載の分類装置。
【請求項34】
容器キャリアの識別子が無線自動識別(RFID)タグを含む、請求項32記載の分類装置。
【請求項35】
RFIDタグが容器キャリア本体内に埋め込まれている、請求項34記載の分類装置。
【請求項36】
1つまたはそれ以上の検出器が、容器キャリアのRFIDタグを検出するように設定されたRFIDリーダーである、請求項35記載の分類装置。
【請求項37】
運搬装置がコンベヤー・ベルトを含む、請求項26から36のいずれかに記載の分類装置。
【請求項38】
運搬装置が一連の動力ローラーを含む、請求項26から37のいずれかに記載の分類装置。
【請求項39】
1つまたはそれ以上の作動装置が、容器キャリアを経路から対応する分類済みストリップへ振り分けるためのプランジャーを含む、請求項26から38のいずれかに記載の分類装置。
【請求項1】
標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させ;
標本容器を保持する容器キャリアを経路に沿って搬送し;
経路上の容器キャリアの位置を検出し;そして
結合したアイデンティティを用いる容器キャリアの検出に基づいて標本容器を分類する、
の各工程を含む方法。
【請求項2】
結合が標本容器のアイデンティティと容器キャリアのアイデンティティを電子的に一致させる、請求項1記載の方法。
【請求項3】
複数の標本容器が搬送および分類され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項1または2記載の方法。
【請求項4】
標本容器がその中に処理用の標本を包含する、請求項1から3のいずれかに記載の方法。
【請求項5】
標本が生体液または生体組織である、請求項4記載の方法。
【請求項6】
処理が標本に1つまたはそれ以上の検査を実施することを含む、請求項4記載の方法。
【請求項7】
結合が、コンピュータ・システムにおいて標本容器の識別子を容器キャリアの識別子と関連付けることを含む、請求項1から6のいずれかに記載の方法。
【請求項8】
標本容器の識別子がバーコードを含む、請求項7記載の方法。
【請求項9】
容器キャリアの識別子が無線自動識別(RFID)タグを含む、請求項7記載の方法。
【請求項10】
RFIDタグが容器キャリアの本体に貼付される、請求項9記載の方法。
【請求項11】
容器キャリアの位置の検出が、RFIDリーダーにより容器キャリアのRFIDタグを検出することを含む、請求項9記載の方法。
【請求項12】
搬送が、容器キャリアをラインに沿ってスライドさせることを含む、請求項1から11のいずれかに記載の方法。
【請求項13】
搬送が、コンベアー・ベルト上で容器キャリアを運搬することを更に含む、請求項12記載の方法。
【請求項14】
搬送が、コンベアー・ベルト上で容器キャリアを運搬することを含む、請求項1から13のいずれかに記載の方法。
【請求項15】
搬送が、一連の動力ローラー上で容器キャリアを運搬することを含む、請求項1から14のいずれかに記載の方法。
【請求項16】
標本容器の分類が、容器キャリアを標本に必要とされる温度範囲に基づいて振り分けることを含む、請求項1から15のいずれかに記載の方法。
【請求項17】
標本容器の分類が、標本に行われるべき処理に基づいて容器キャリアを振り分けることを含む、請求項16記載の方法。
【請求項18】
標本容器の分類が標本に行われるべき処理に基づいて容器キャリアを振り分けることを含む、請求項1から17のいずれかに記載の方法。
【請求項19】
容器キャリアの振り分けが、プランジャーを作動させて容器キャリアを経路から分類済みストリップに移動させることを含む、請求項18記載の方法。
【請求項20】
容器キャリアを標本容器と物理的に連結させることを更に含む、請求項1から19のいずれかに記載の方法。
【請求項21】
物理的連結を手動で行う、請求項20記載の方法。
【請求項22】
物理的連結を自動で行う、請求項20記載の方法。
【請求項23】
コンピュータ・システムにおいて標本容器の識別子を容器キャリアの識別子と関連付けることにより、標本容器のアイデンティティを標本容器を保持する容器キャリアのアイデンティティと結合させ、ここで、容器キャリアの識別子は無線自動識別(RFID)タグであり;
容器キャリアをコンベヤーベルト上で運搬することによって、標本容器を含有する容器キャリアを経路に沿って搬送し;
RFIDリーダーで容器キャリアのRFIDタグを検出することによって、経路上の容器キャリアの位置を検出し;そして、
プランジャーを作動させて容器キャリアを経路から対応する分類済みストリップへ振り分けることによって、容器キャリアの検出に基づいて標本に行われるべき処理に従って標本容器を分類する、
の各工程を含む方法。
【請求項24】
複数の標本容器が搬送および分類され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項23記載の方法。
【請求項25】
容器キャリアを標本容器に物理的に連結させることを更に含む、請求項23または24記載の方法。
【請求項26】
複数の容器キャリアを経路に沿って運搬するように設定された運搬装置であって、ここで、各容器キャリアはその中に標本容器を保持しており;
複数の容器キャリアのそれぞれのアイデンティティを容器キャリアのアイデンティティに結合させるコンピュータ・システム;
運搬装置上の容器キャリアのアイデンティティを検出する1つまたはそれ以上の検出器;および、
結合されたアイデンティティを用いて、容器キャリア中に含有される標本容器の所望の処理に基づいて各容器キャリアを分類ストリップに選択的に振り分けることによって標本容器を分類するように設定された1つまたはそれ以上の作動装置
を含む分類装置。
【請求項27】
結合されたアイデンティティが電子的に一致する、請求項26記載の分類装置。
【請求項28】
運搬装置が複数の標本容器を運搬するように設定され、各容器キャリアのアイデンティティが個別の標本容器のアイデンティティと結合される、請求項26または27記載の分類装置。
【請求項29】
標本容器がその中に処理用の標本を含有する、請求項26から28のいずれかに記載の分類装置。
【請求項30】
標本が生体液または生体組織である、請求項29記載の分類装置。
【請求項31】
処理が標本に1つまたはそれ以上の検査を実施することを含む、請求項29記載の分類装置。
【請求項32】
標本容器の識別子が容器キャリアの識別子と関連付けられる、請求項26から31のいずれかに記載の分類装置。
【請求項33】
標本容器の識別子がバーコードを含む、請求項32記載の分類装置。
【請求項34】
容器キャリアの識別子が無線自動識別(RFID)タグを含む、請求項32記載の分類装置。
【請求項35】
RFIDタグが容器キャリア本体内に埋め込まれている、請求項34記載の分類装置。
【請求項36】
1つまたはそれ以上の検出器が、容器キャリアのRFIDタグを検出するように設定されたRFIDリーダーである、請求項35記載の分類装置。
【請求項37】
運搬装置がコンベヤー・ベルトを含む、請求項26から36のいずれかに記載の分類装置。
【請求項38】
運搬装置が一連の動力ローラーを含む、請求項26から37のいずれかに記載の分類装置。
【請求項39】
1つまたはそれ以上の作動装置が、容器キャリアを経路から対応する分類済みストリップへ振り分けるためのプランジャーを含む、請求項26から38のいずれかに記載の分類装置。
【図1】

【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図4C】
【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図4C】
【公表番号】特表2012−505413(P2012−505413A)
【公表日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2011−531174(P2011−531174)
【出願日】平成21年10月8日(2009.10.8)
【国際出願番号】PCT/US2009/060006
【国際公開番号】WO2010/042722
【国際公開日】平成22年4月15日(2010.4.15)
【出願人】(505063050)クエスト ダイアグノスティックス インヴェストメンツ インコーポレイテッド (20)
【Fターム(参考)】
【公表日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成21年10月8日(2009.10.8)
【国際出願番号】PCT/US2009/060006
【国際公開番号】WO2010/042722
【国際公開日】平成22年4月15日(2010.4.15)
【出願人】(505063050)クエスト ダイアグノスティックス インヴェストメンツ インコーポレイテッド (20)
【Fターム(参考)】
[ Back to top ]