
標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステム
【課題】標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステムを最適化する。
【解決手段】標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステムを最適化するために、標準貨物保持器(2)を荷役設備(6)によって無人搬送車両(9)に積み込み、または前記搬送車両(9)に荷受けさせ、無人搬送車両(9)が荷役設備(6)と積み降ろしゾーン(16)との間で標準貨物保持器(2)を搬送する。代替的に、標準貨物保持器を荷役設備(6)にまたは荷役設備(6)から搬送するための無人搬送車両(9)用の運転ゾーン(15)は荷役設備(6)に隣接し、かつ標準貨物保持器(2)を往復運搬送するための積み降ろしゾーン(16)は運転ゾーン(15)に隣接する。
【解決手段】標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステムを最適化するために、標準貨物保持器(2)を荷役設備(6)によって無人搬送車両(9)に積み込み、または前記搬送車両(9)に荷受けさせ、無人搬送車両(9)が荷役設備(6)と積み降ろしゾーン(16)との間で標準貨物保持器(2)を搬送する。代替的に、標準貨物保持器を荷役設備(6)にまたは荷役設備(6)から搬送するための無人搬送車両(9)用の運転ゾーン(15)は荷役設備(6)に隣接し、かつ標準貨物保持器(2)を往復運搬送するための積み降ろしゾーン(16)は運転ゾーン(15)に隣接する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷役設備を用いて標準貨物コンテナを鉄道車両に積み込み、または標準コンテナを鉄道車両から降ろすことによって、道路と鉄道との間でレール荷役ゾーンにて標準貨物コンテナ、特にISOコンテナおよびスワップボディを移載するための方法に関する。
【背景技術】
【0002】
本発明はまた、鉄道車両における標準貨物コンテナの積み降ろしのためのレール移載ゾーンで、鉄道線路に隣接する荷役設備により、標準貨物保持器、特にISOコンテナおよびスワップボディを道路と鉄道との間で移載するための設備にも関する。
【0003】
コンテナおよびスワップボディを鉄道と道路との間で移載するためのガントリクレーンは、欧州特許EP0796813B1から既知である。ガントリクレーンに通例の設計に相応して、ガーダの長手方向に走行することのできるクレーンガーダ上のクレーントロリが設けられる。ガントリクレーンの走行方向に見て、2つの油圧シリンダユニットがそれらの間に間隔を置いて縦に並んで取り付けられる。シリンダユニットは各々垂直に配向され、基本的にリフトシリンダおよびその中の可動プッシュロッドから構成される。リフトシリンダはクレーントロリに不動に取り付けられ、クレーントロリから下方に延びるプッシュロッドは、下降方向に延長し、かつそれに相応して上昇方向に収縮することができる。プッシュロッドのクレーントロリとは反対側の端部には、長穴連結を介して懸吊フレームが取り付けられ、そこにスプレッダフレームの形の荷重テークアップ装置が吊設される。長穴連結を介する懸吊フレームのプッシュロッドとの連結は、シリンダユニットの同期動作の差およびコンテナの対応する傾斜の均衡を保つために選択された。加えて、懸吊フレームおよびその中に配置された荷重テークアップ装置は、両ロッド・シリンダ・ユニットの長手軸に対して少なくとも500mm横方向に偏位するので、コンテナまたはスワップボディを鉄道車両上に配置するか、あるいはそこから持ち上げることもでき、かつ同時に吊架線が荷重テークアップ装置が横方向に偏位配置された状態で、プッシュロッドに到達することができる。
【0004】
加えて、欧州特許EP1365984B1から、コンテナ、特にISOコンテナを積み重ねるためのブリッジクレーンであって、コンテナターミナル内のコンテナを保管場所内外に移動させるクレーンも公知である。該ブリッジクレーンは、略矩形の保管場所の幅に跨るクレーンガーダを含む。クレーンガーダ上をその長手方向に沿って、クレーントロリが保管場所の幅方向に移動することができる。クレーンガーダはブリッジトロリを介して軌道上をクレーン走行の方向に、かつしたがってクレーンガーダ上のクレーントロリに対して横方向にだけでなく保管場所の長手方向にも、移動することができる。コンテナを荷役することができるために、垂直方向に案内され、かつ上昇または下降することのできるマストが、クレーントロリ上に配置される。このマストはボックスガーダ状に形成され、マストの昇降動作のために、昇降装置がクレーントロリ上に配置される。荷役されるコンテナの方向を向いたマストの下端には、コンテナ用の荷重テークアップ装置、特にいわゆるスプレッダが関着吊設される。荷重テークアップ装置は、ケーブルを介してクレーントロリ上の昇降装置に連結される。マストは上昇または下降方向に直接駆動されず、ケーブルを介して間接的に荷重テークアップ装置に作用するだけである。クレーントロリと荷重テークアップ装置との間に剛性マストを使用することは、ケーブルに単独で吊設された荷重テークアップ装置も使用する場合とは対照的に、揺動をほとんど生じずにコンテナを荷役することができるという利点を有する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】欧州特許EP0796813B1
【特許文献2】欧州特許EP1365984B1
【発明の概要】
【0006】
本発明は、標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステムを最適化する問題に基づいている。
【0007】
この問題は、請求項1の特徴によって標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための方法、ならびに請求項6の特徴によって標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための設備を介して解決される。本発明の有利な展開を請求項2ないし5および請求項7ないし15に示す。
【0008】
本発明では、標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための方法であって、レール移載ゾーンで鉄道線路に隣接する荷役設備によって標準貨物保持器を鉄道車両に積み込みまたはそこから降ろすようにし、標準貨物保持器を荷役設備によって無人搬送車両に積み込むかまたは無人搬送車両から受け取り、かつ標準貨物保持器を無人搬送車両によって荷役設備と積み降ろしゾーンとの間で搬送することによって、移載最適化を達成する方法を提供する。無人搬送車両を使用することによって、道路およびレール移載ゾーンは分離され、その結果、鉄道車両と割り当てられたトラックとの間のロジスティック調整が不要になるので、鉄道車両はより速く積み降ろしを行なうことができる。
【0009】
鉄道車両および関連トラックの到着時間のさらなる脱エンタングルメント(disentanglement)は、標準貨物保持器を積み降ろしゾーンでスタッキング装置によって無人搬送車両に積み込みまたは無心搬送車両から受け取り、かつ標準貨物保持器をスタッキング装置により無人搬送車両と貨物保持器保管場所との間で搬送することによって達成される。貨物保持器保管場所の利用はロジスティックスの柔軟性を高める。
【0010】
特に有利な点は、標準貨物保持器を道路移載ゾーンでスタッキング装置によってトラックに積み降ろしすること、および標準貨物保持器をスタッキング装置によって積み降ろしゾーンと保管場所との間で搬送することである。こうして、スタッキング装置を保管場所タスクのみならず、トラックおよび無人搬送車両の積み降ろしにも使用することができる。
【0011】
柔軟性のさらなる向上は標準貨物保持器が積み降ろしゾーンで、昇降台を装備した無人搬送車両によって支持フレーム上に配置されることによって達成される。無人搬送車両はこうして、移載およびスタッキング装置とは独立して動作することができる。
【0012】
変形例では、支持フレーム上に載置された標準貨物保持器は、追加的無人搬送車両によって搬送される。
【0013】
本発明では、鉄道線路に隣接するレール移載ゾーンで標準貨物保持器を鉄道車両に積み降ろしするための荷役設備により標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するためのシステムの移載最適化は、標準貨物保持器を荷役設備に運ぶかまたは荷役設備から受け取る無人搬送車両用の運転ゾーンが荷役設備に隣接すること、および標準貨物保持器を配送または集荷するための積み降ろしゾーンが運転ゾーンに隣接することによって達成される。これに関連する利点に関しては、先述の説明を参照されたい。
【0014】
そのために、積み降ろしゾーンと保管場所との間で標準貨物保持器を搬送するためのスタッキング装置を持つ貨物保持器保管場所が積み降ろしゾーンに隣接することが有利である。貨物保持器保管場所は標準貨物保持器の中間保管を可能にする。
【0015】
標準貨物保持器をトラックに積み降ろしするための道路移載ゾーンが保管場所に隣接することが特に有利である。こうして、貨物保持器保管場所はレールおよび道路両方の移載ゾーンに連携される。
【0016】
柔軟性および移載性能を高めるために、無人搬送車両は各々昇降台を装備し、標準貨物保持器を無人搬送車両の昇降台に載置するかそこから受け取るために、積み降ろしゾーンに支持フレームが配置される。
【0017】
設計上の観点から、荷役設備およびスタッキング装置をブリッジまたはガントリクレーンのように形成することが有利である。
【0018】
標準貨物保持器の向きは、荷役設備および/またはスタッキング装置によって運搬されている標準貨物保持器を垂直軸周りに旋回させることができることにより、反転流に適応させることができる。
【0019】
設計上の観点から、荷役設備および/またはスタッキング装置は、昇降方向に延在する剛性マストがその上を案内されるクレーンガーダに沿ってトロリ軌道方向に移動可能なクレーントロリを有することが有利である。それは、クレーントロリに取り付けられた少なくとも1つの昇降装置を介して、ケーブルによって昇降方向に移動可能であり、その端部に標準貨物保持器用の荷重テークアップ装置が取り付けられる。1つの展開では、マストは、クレーントロリに対して垂直枢軸を中心に旋回することができる。
【0020】
レール軌道が吊架線を装備する場合、荷役設備の荷重テークアップ装置はマストから横方向に偏位して配置される。
【0021】
標準貨物保持器の安定した案内は、第1ガーダおよび第2ガーダから構成されたクレーンガーダであって、第1ガ−ダおよび第2ガーダ上にトロリ軌道が位置し、トロリ軌道上をクレーントロリがトロリ軌道方向に移動することができ、第1ガーダおよび第2ガーダがトロリ軌道方向に対し直角に走るクレーン走行方向に互いに間隔を置いて配置されて成るクレーンガーダによって達成される。
【0022】
本発明の幾つかの展開を図面に示し、以下で説明する。
【図面の簡単な説明】
【0023】
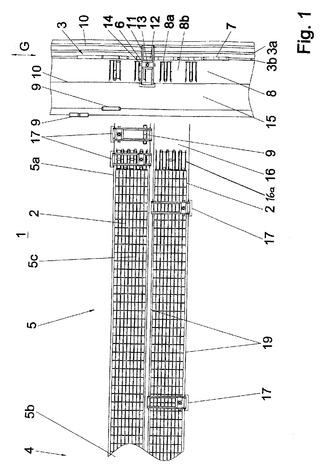
【図1】道路とレール移載ゾーンとの間のISOコンテナおよびスワップボディのような標準貨物保持器のための移載システムの概略平面図である。
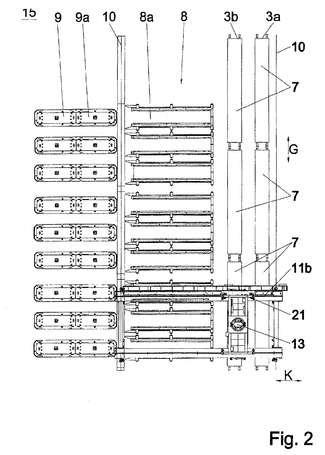
【図2】図1のレール移載ゾーン領域の部分拡大図である。
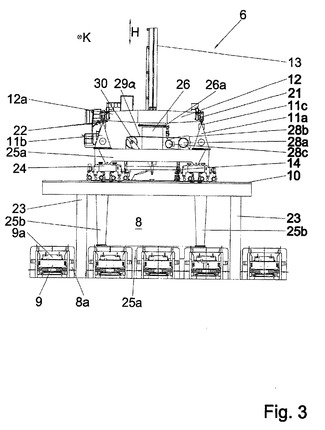
【図3】図2の側面図である。
【図4】レール移載ゾーンの代替的展開の図2に相応する図である。
【図5】レール移載ゾーンの別の代替的展開の図2に相応する図である。
【図6】代替的展開の荷役設備の側面図である。
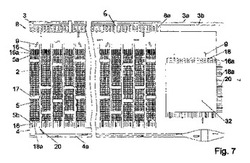
【図7】道路とレール移載ゾーンとの間のISOコンテナおよびスワップボディのような標準貨物保持器のための移載システムの図1から拡張された概略平面図である。
【発明を実施するための形態】
【0024】
図1は、レール移載ゾーン3と道路移載ゾーン4との間を搬送される、ISOコンテナおよびスワップボディのような標準貨物保持器2のための移載システム1の概略平面図を示す。概略平面図は移載システム1の一部分しか示さないが、基本的な構成要素を識別している。移載システム1は、貨物保持器保管場所5を介して接続されたレール移載ゾーン3および道路移載ゾーン4から構成される。貨物保持器保管場所5は、標準貨物保持器2の中間保管所として働く。
【0025】
レール移載ゾーン3は本質的に、第1レール軌道3a、間隔を置いて配置された平行な第2レール軌道3b、および割り当てられた荷役設備6から構成される。第1および第2軌道3aおよび3b上を、鉄道車両7が標準貨物保持器2の内向きおよび外向き搬送のために移動することができる。荷役設備6は、第1および第2軌道3aおよび3bのみならず移載ゾーン8をも跨ぐブリッジまたはガントリクレーンとして展開される。移載ゾーン8では、無人搬送車両9を乗り入れまたは退出することができる。
【0026】
無人搬送車両9は、2個の20´コンテナ、1個の40´コンテナ、または1個の45´コンテナを搬送するのに適する。荷役設備6を用いて、標準貨物保持器は、移載ゾーン8に位置する無人搬送車両9と鉄道車両7との間で移載される。
【0027】
ブリッジまたはガントリクレーンとして展開される荷役設備6は基本的に、第1および第2軌道3aおよび3bに沿ってレール10上を軌道方向Gに移動することのできるクレーンガーダ11から構成される。レール10は軌道3a、3bと平行に走る。クレーンガーダ11上で、荷役設備6の駆動方向と一致する軌道方向Gを横切って、クレーントロリ12はトロリ軌道方向Kに移動することができる。クレーントロリ12に、マスト13が吊設され、それは、その下端13aに取り付けられた荷重テークアップ装置14によって標準貨物保持器2を受け取りかつ解放するために、垂直方向にかつクレーントロリ12に対して昇降することができる。
【0028】
荷役設備6の展開に応じて、標準貨物保持器2の向きは無人搬送車両9と鉄道車両7との間の移載中に維持され、あるいは必要ならば垂直軸を中心に旋回する。手元の図1による概略平面図で、鉄道車両7上の標準貨物保持器2は軌道方向Gに向けられ、長手軸を持つ無人搬送車両9はそれらに対して90度旋回する。それに対応して、荷役設備6はこの目的のために回転装置26を有する。
【0029】
移載ゾーン8は第2軌道3bの側面に沿って配置される。図示する例では、この移載ゾーン8は基本的に支持フレーム8aから構成され、鉄道車両7から降ろされた標準貨物保持器2は、中間保管のために支持フレーム8a上に配置することができ、あるいは荷役設備6によって支持フレーム8aから受け取り、かつ/または無人搬送車両9が標準貨物保持器2を荷役設備6に配送するかそこから受け取るために待機することのできる隣接駐車場所8bから受け取ることができる。無人搬送車両9は各々、昇降台9aを下降した無人搬送車両9が支持フレーム8a内に乗り入れ、こうして標準貨物保持器2が無人搬送車両に載置された状態で駆動することができるように、昇降台9aを装備する。
【0030】
標準貨物保持器2を受け取るために、昇降台9aは次いで上昇し、標準貨物保持器2は支持フレーム8aから持ち上げられる。無人搬送車両9は次いで、昇降台9aが上昇しかつ標準貨物保持器2がそこに載置されたまま駆動して支持フレーム8aから離れ、次いで昇降台9aを下降させ、その駆動を続ける。支持フレーム8a上への標準貨物保持器2の配置は、逆の順序で実行される。
【0031】
移載ゾーン8は、無人搬送車両9が自動運転で乗り入れる運転ゾーン15に隣接する。この運転ゾーン15に隣接して、かつ好ましくは移載ゾーン8の反対側に、貨物保持器保管場所5への接合部分を形成する積み降ろしゾーン16が位置する。
【0032】
この積み降ろしゾーン16では、さらなる荷役に備えて標準貨物保持器2をそこに一時的に保管するために、再び支持フレームが配設される。標準貨物保持器2を支持フレーム16a無しに無人搬送車両9により直接移載するために、そこにも無人搬送車両9用の場所を設けることができる。積み降ろしゾーン16では、支持フレーム16aは、貨物保持器保管場所5で動作しかつブリッジまたはガントリクレーンの形を取るスタッキング装置17によって、標準貨物保持器2を積み降ろしされる。
【0033】
貨物保持器保管場所5は、平行に横並びにかつ列を成して配置される多数の貨物保持器保管ゾーン5cから構成される。それらのレール側端部5aに、各々が積み降ろしゾーン16を有し、それらの道路側端部5bは保管および取出しゾーン18に関連付けられる。各貨物保持器保管ゾーン5cは、貨物保持器保管ゾーン5cに沿ってレール19上をクレーン移動方向に移動することのできる1つまたは幾つかのスタッキング装置17を割り当てられる。スタッキング装置17は、貨物保持器保管ゾーン5cと積み降ろしゾーン16または保管および取出しゾーン18との間で標準貨物保持器2を搬送する。各貨物保持器保管ゾーン5cは、1つ以上のスタッキング装置17に加えて、標準貨物保持器2用の留置ゾーン5dをも有する。留置ゾーン5dは矩形の床空間を有し、その上に標準貨物保持器2が行および列を成して配置される。
【0034】
最高5個までの標準貨物保持器2が互いに上下に積み重ねて保管される。留置された標準貨物保持器2はそれらの長辺を基本的にレール19と平行に、かつしたがってスタッキング装置17のクレーン走行方向に配向される。標準貨物保持器2のこの配向は、必要なアラインメント修正に加えて受取りまたは預託中に、スタッキング装置17が標準貨物保持器2を旋回させる必要がないように、発着するトラック20が存在する積み降ろしゾーン18でも見ることができる。原則として、水平面内で標準貨物保持器2の向きを変えるための旋回機構をスタッキング装置17に装備することも可能である。スタッキング装置17の設計は基本的に荷役設備6の設計に対応する。
【0035】
貨物保持器保管場所5のレール側端部5aでは、標準貨物保持器2が保管および取出しゾーン16でスタッキング装置17によって支持フレーム16a上に配置され、あるいはそこから取り出される。保管および取出しゾーン16はレール移載ゾーン3への接合部分として働き、横に並べて配置された標準貨物保持器2用の幾つかの支持フレーム16aを有し、一時的に保管された標準貨物保持器2を受け取るため、またはそれらをそこに留置するために、昇降台9a付きの無人搬送車両9がそこに乗り入れることができる。また、コンテナ2をスタッキングクレーン17[訳注:これ以外では常に「スタッキング装置17」と呼ばれている]によって台から直接受け取り、またはそこに配置することもできる。その場合、支持フレーム16aは存在せず、無人搬送車両9は昇降テーブルを持たない。
【0036】
図2は、図1のレール移載ゾーン3領域の部分拡大図を示す。この部分拡大図では、無人搬送車両9用の駐車場所8bが支持フレーム8aの間に示されていない。セミガントリクレーンの形の荷役設備6は、レール10に沿って軌道方向Gに横行することができる。セミガントリクレーン構造に対応して、2本のレール10のうちの1本、すなわち第1軌道3aに隣接する方のレール10は、軌道3a、3bとほぼ同一高さレベルに配置される。対向するレール10は、無人搬送車両9が交差することなく支持フレーム8aおよび/または駐車場所8bに乗り入れまたはそこから退出することができるように、高架にされる。
【0037】
クレーントロリ12は基本的に矩形のベースフレーム12aから構成され、その四隅にクレーンガーダ12のトロリ軌道上を走行するトロリ走行装置21が配置される。クレーントロリ9のベースフレーム9aは中心領域に開口を有し、そこを回転管26が通過する。回転管26は、クレーントロリ12のベースフレーム12aの旋回継手26aを介してその頂端で支持され、旋回継手26aを介して垂直回転軸周りに旋回させることができる。マスト13は回転管22の内側を走り、そこで案内される。
【0038】
図2はまた、クレーンガーダ11が、レール方向Gに見て1つの高さレベルで縦一列に互いに間隔を置いて配置された第1ガーダ11aおよび第2ガーダ11bを含むように設計されていることをも示す。
【0039】
図3は図2の側面図である。第1ガーダ11aおよび第2ガーダ11bは各々三角形の断面を有することが見て取れる。この三角形の断面は、11cの頂点領域の角度が約30°の二等辺三角形の形状を有する。トロリレール22は、第1ガーダ11aおよび第2ガーダ11bの頂点領域11cの各々に取り付けられる。クレーントロリ12はこれらのレール上をトロリ軌道方向Kに横行することができる。この正面領域で、セミガントリ設計に対応して、レール10は支持体23を介して高架にされ、第1ガーダ11aおよび第2ガーダ11bの[ドイツ語では1つ以上の語が欠落しており、図3によると、それは「ベース」または「ベースプレート」であるかもしれない]は、ベースガーダ25aによって接続され、クレーン走行機構24を介してレール10上に直接支持される。また、セミガントリ設計に対応して、後部領域で、第1ガーダ11aおよび第2ガーダ11bの端部が、2つの垂直ガーダ25bを介してクレーン横行機構24に支持される。2つの垂直ガーダ25bの下端は、別のベースガーダ25aを介してU字状に接続される。
【0040】
図3はまた、旋回継手26aおよび回転管26をも示す。回転管16のための駆動装置として、その外側の周りを走るリングギヤが設けられ、電気モータ・ロータリ・アクチュエータと係合する。マスト13を昇降方向Hに移動させるために、矩形の昇降枠27(図6参照)が回転管26の下端に不動に取り付けられる。マスト13用の昇降装置28はクレーントロリ12の昇降枠27上に位置する。
【0041】
昇降装置28は、駆動モータ28cによって駆動される共通トランスミッションに同軸的に軸受装着された、第1ケーブルドラム28aおよび第2ケーブルドラム(図示せず)を有する。第1ケーブル29aおよび第2ケーブル29b(図3には図示せず)は、第1ケーブルドラム28aから繰り出される。第3ケーブル29cおよび第4ケーブル29d(同じく図3には図示せず)は、第2ケーブルドラムから繰り出される。相応して、4本のケーブル29が存在し、それらは第1または第2ケーブルドラム28aから垂直方向下向きに直接繰り出されるか、あるいはマスト13の反対側に水平方向に案内され、そこから水平回転軸を持つコーナプーリを介して90°垂直方向下向きに転向する。ケーブル29の端部は荷重テークアップ装置14に接続される。
【0042】
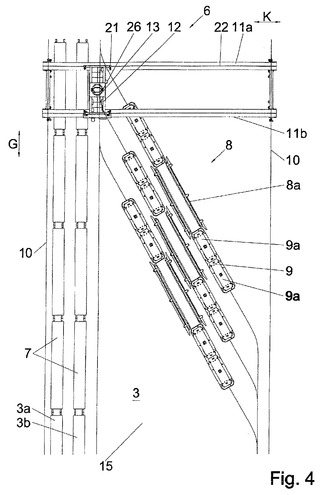
図4は、基本的に図2に示したものに相応する代替的展開におけるレール移載ゾーン3の図を示す。ここでも平行に走る2本の第1および第2レール軌道3a、3bが、その上を移動することのできる鉄道車両7のみならず、軌道の方向に平行に走る荷役設備6用のレール10と共に見て取れる。ここで、軌道3a、3bとレール11との間の運転ゾーン15に乗り入れまたはそこから退出するために、無人搬送車両9はレール11を横断する必要がないので、荷役設備6はガントリクレーンとして設計される。先に説明した通り、荷役設備6は回転管26および旋回継手26aを装備することができ、したがって荷重テークアップ装置14によって持ち上げられた標準貨物保持器を水平面内で垂直軸周りに旋回させることができる。これは、鉄道車両7から持ち上げられた標準貨物保持器2を移載ゾーン8内で支持フレーム8a上に配置し、または支持フレームから標準貨物保持器を取り出すことを可能にするために要求される。支持フレーム8aは大まかに、それらの長い寸法を軌道方向Gに対して30°の角度に配向される。したがって、無人搬送車両9は片側から支持フレーム8a内に乗り入れ、次いで標準貨物保持器2を受け取るか、またはそれらを降ろし、かつ次いで荷役設備6およびしたがってそのレール10の端部から運転ゾーン15を退去するために、反対側に退出することができる。
【0043】
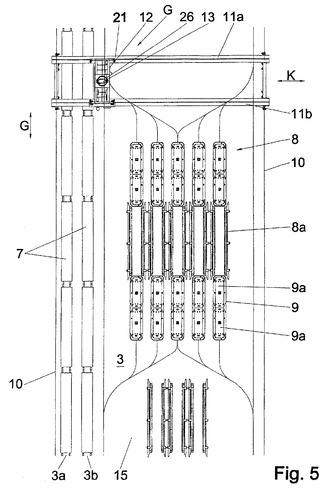
図5は、レール移載ゾーン3の別の代替的展開を示す。基本的設計は図4で先述した展開と同様である。
【0044】
無人搬送車両9はここでも、レール11と軌道3a、3bとの間に位置する運転ゾーンに乗り入れる。しかし、中間保管のための支持フレーム8aおよび標準貨物保持器2は運転ゾーンの中心に軌道3a、3bと平行に向けられるので、荷役設備6に回転管26および旋回継手26aを持つ構成は不要である。
【0045】
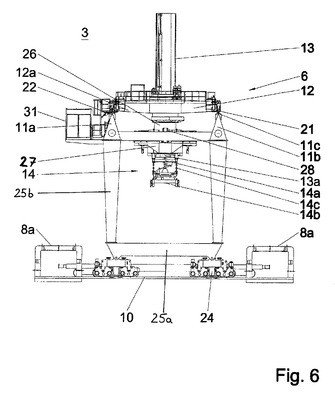
図6はさらに、ガントリクレーン設計における荷役設備6の側面図を示す。詳細な説明は、図2および図3について行なった先の説明を参照されたい。著しい相違として、ここでは第1ガーダ11aおよび第2ガーダ11bが垂直支持体を介してクレーン横行機構24に支持されることが見て取れる。垂直支持体25bの下端は、それらを接続する水平ベースガーダ25aを介して安定化する。
【0046】
図6はさらに、荷重テークアップ装置14が、マスト13の下端13aに不動に取り付けられた吊りフレーム14aと、チェーン14cを介して吊りフレーム14に吊設されたスプレッダフレーム14bとに分割されることを示す。図6はまた、コンテナ状レセプタクル31が第2ガーダ11bの外側に取り付けられ、その中に荷役設備6用の制御および電源電気または電子部品が配設されることをも示す。
【0047】
移載ゾーン3内で直線状に走る第1および第2軌道3aおよび3bの間に、第1および第2軌道3a、3bより上に吊架線を各々担持する、種々の吊架線支持体を通常配置することができる。荷役設備6はその場合、横方向片持ち荷重テークアップ装置14を有する。
【0048】
図7は、図1から拡張された移載システムの概略平面図を示す。したがって概略平面図は、図1に係る概略平面図の全ての基本的要素、例えばレール移載ゾーン3、第1および第2軌道3a、3b、貨物保持器保管場所5、荷役設備6、移載ゾーン8、支持フレーム8a、無人搬送車両9、積み降ろしゾーン16、およびスタッキング装置17を示す。
【0049】
横に並べて平行に配置された種々の貨物保持器保管場所5も示される。
【0050】
図1と比較して、道路移載ゾーン4はより詳細に示されている。貨物保持器保管場所5の道路側端部5bで、標準貨物保持器2は保管および取出しゾーン18でスタッキング装置17によって、そこに位置する駐車場所18aに駐車したトラック20上に配置されるか、またはそこから取り出される。保管および取出しゾーン18は道路移載ゾーン4への接合部分であり、横に並べて配置されるトラック20用の幾つかの駐車場所18aを有する。
【0051】
加えて、レール移載ゾーン3の方を向いた無人搬送車両9用の積み降ろしゾーン16を有する多くの貨物保持器保管場所5に隣接して、配送場所32が配置される。貨物保持器保管場所5に関して、積み降ろしゾーン16は貨物保持器2の中間保管のための支持フレーム16aを装備する。加えて、配送場所32は、トラック20を介する貨物保持器2の内向きおよび外向きの搬送のための道路4aを持つ道路移載場所4の方を向いた、保管および取出し場所18を備える。保管および取出しゾーン18は、これらの駐車場所18aに後ろ向きに入るトラック20用に横に並んで平行に配置された駐車場所18aを有する。
【符号の説明】
【0052】
1 移載システム
2 標準貨物保持器
3 レール移載ゾーン
3a 第1軌道
3b 第2軌道
4 道路移載ゾーン
4a 道路
5 貨物保持器保管場所
5a レール側端部
5b 道路側端部
5c 貨物保持器保管ゾーン
6 荷役設備
7 鉄道車両
8 移載ゾーン
8a 支持フレーム
8b 駐車空間
9 無人搬送車両
9a 昇降台
10 レール
11 クレーンガーダ
11a 第1ガーダ
11b 第2ガーダ
11c 頂部
12 クレーントロリ
12a ベースフレーム
13 マスト
13a マストの下端
14 荷重テークアップ装置
14a 懸吊フレーム
14b スプレッダフレーム
14c チェーン
15 運転ゾーン
16 積み降ろしゾーン
16a 支持フレーム
17 スタッキング装置
18 保管および取出しゾーン
18a 駐車空間
19 レール
20 トラック
21 トロリ走行装置
22 トロリレール
23 支持体
24 クレーン走行機構
25a ベースガーダ
25b 垂直支持体
26 回転管
26a 旋回継手
27 昇降枠
28 昇降装置
28a 第1ケーブルドラム
28b トランスミッション
28c 駆動モータ
29 ケーブル
30 コーナプーリ
31 コンテナ
32 配送場所
G 軌道方向
H 昇降方向
K トロリ軌道方向
【技術分野】
【0001】
本発明は、荷役設備を用いて標準貨物コンテナを鉄道車両に積み込み、または標準コンテナを鉄道車両から降ろすことによって、道路と鉄道との間でレール荷役ゾーンにて標準貨物コンテナ、特にISOコンテナおよびスワップボディを移載するための方法に関する。
【背景技術】
【0002】
本発明はまた、鉄道車両における標準貨物コンテナの積み降ろしのためのレール移載ゾーンで、鉄道線路に隣接する荷役設備により、標準貨物保持器、特にISOコンテナおよびスワップボディを道路と鉄道との間で移載するための設備にも関する。
【0003】
コンテナおよびスワップボディを鉄道と道路との間で移載するためのガントリクレーンは、欧州特許EP0796813B1から既知である。ガントリクレーンに通例の設計に相応して、ガーダの長手方向に走行することのできるクレーンガーダ上のクレーントロリが設けられる。ガントリクレーンの走行方向に見て、2つの油圧シリンダユニットがそれらの間に間隔を置いて縦に並んで取り付けられる。シリンダユニットは各々垂直に配向され、基本的にリフトシリンダおよびその中の可動プッシュロッドから構成される。リフトシリンダはクレーントロリに不動に取り付けられ、クレーントロリから下方に延びるプッシュロッドは、下降方向に延長し、かつそれに相応して上昇方向に収縮することができる。プッシュロッドのクレーントロリとは反対側の端部には、長穴連結を介して懸吊フレームが取り付けられ、そこにスプレッダフレームの形の荷重テークアップ装置が吊設される。長穴連結を介する懸吊フレームのプッシュロッドとの連結は、シリンダユニットの同期動作の差およびコンテナの対応する傾斜の均衡を保つために選択された。加えて、懸吊フレームおよびその中に配置された荷重テークアップ装置は、両ロッド・シリンダ・ユニットの長手軸に対して少なくとも500mm横方向に偏位するので、コンテナまたはスワップボディを鉄道車両上に配置するか、あるいはそこから持ち上げることもでき、かつ同時に吊架線が荷重テークアップ装置が横方向に偏位配置された状態で、プッシュロッドに到達することができる。
【0004】
加えて、欧州特許EP1365984B1から、コンテナ、特にISOコンテナを積み重ねるためのブリッジクレーンであって、コンテナターミナル内のコンテナを保管場所内外に移動させるクレーンも公知である。該ブリッジクレーンは、略矩形の保管場所の幅に跨るクレーンガーダを含む。クレーンガーダ上をその長手方向に沿って、クレーントロリが保管場所の幅方向に移動することができる。クレーンガーダはブリッジトロリを介して軌道上をクレーン走行の方向に、かつしたがってクレーンガーダ上のクレーントロリに対して横方向にだけでなく保管場所の長手方向にも、移動することができる。コンテナを荷役することができるために、垂直方向に案内され、かつ上昇または下降することのできるマストが、クレーントロリ上に配置される。このマストはボックスガーダ状に形成され、マストの昇降動作のために、昇降装置がクレーントロリ上に配置される。荷役されるコンテナの方向を向いたマストの下端には、コンテナ用の荷重テークアップ装置、特にいわゆるスプレッダが関着吊設される。荷重テークアップ装置は、ケーブルを介してクレーントロリ上の昇降装置に連結される。マストは上昇または下降方向に直接駆動されず、ケーブルを介して間接的に荷重テークアップ装置に作用するだけである。クレーントロリと荷重テークアップ装置との間に剛性マストを使用することは、ケーブルに単独で吊設された荷重テークアップ装置も使用する場合とは対照的に、揺動をほとんど生じずにコンテナを荷役することができるという利点を有する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】欧州特許EP0796813B1
【特許文献2】欧州特許EP1365984B1
【発明の概要】
【0006】
本発明は、標準貨物保持器、特にISOコンテナおよびスワップボディを鉄道と道路との間で移載するための方法およびシステムを最適化する問題に基づいている。
【0007】
この問題は、請求項1の特徴によって標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための方法、ならびに請求項6の特徴によって標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための設備を介して解決される。本発明の有利な展開を請求項2ないし5および請求項7ないし15に示す。
【0008】
本発明では、標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するための方法であって、レール移載ゾーンで鉄道線路に隣接する荷役設備によって標準貨物保持器を鉄道車両に積み込みまたはそこから降ろすようにし、標準貨物保持器を荷役設備によって無人搬送車両に積み込むかまたは無人搬送車両から受け取り、かつ標準貨物保持器を無人搬送車両によって荷役設備と積み降ろしゾーンとの間で搬送することによって、移載最適化を達成する方法を提供する。無人搬送車両を使用することによって、道路およびレール移載ゾーンは分離され、その結果、鉄道車両と割り当てられたトラックとの間のロジスティック調整が不要になるので、鉄道車両はより速く積み降ろしを行なうことができる。
【0009】
鉄道車両および関連トラックの到着時間のさらなる脱エンタングルメント(disentanglement)は、標準貨物保持器を積み降ろしゾーンでスタッキング装置によって無人搬送車両に積み込みまたは無心搬送車両から受け取り、かつ標準貨物保持器をスタッキング装置により無人搬送車両と貨物保持器保管場所との間で搬送することによって達成される。貨物保持器保管場所の利用はロジスティックスの柔軟性を高める。
【0010】
特に有利な点は、標準貨物保持器を道路移載ゾーンでスタッキング装置によってトラックに積み降ろしすること、および標準貨物保持器をスタッキング装置によって積み降ろしゾーンと保管場所との間で搬送することである。こうして、スタッキング装置を保管場所タスクのみならず、トラックおよび無人搬送車両の積み降ろしにも使用することができる。
【0011】
柔軟性のさらなる向上は標準貨物保持器が積み降ろしゾーンで、昇降台を装備した無人搬送車両によって支持フレーム上に配置されることによって達成される。無人搬送車両はこうして、移載およびスタッキング装置とは独立して動作することができる。
【0012】
変形例では、支持フレーム上に載置された標準貨物保持器は、追加的無人搬送車両によって搬送される。
【0013】
本発明では、鉄道線路に隣接するレール移載ゾーンで標準貨物保持器を鉄道車両に積み降ろしするための荷役設備により標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するためのシステムの移載最適化は、標準貨物保持器を荷役設備に運ぶかまたは荷役設備から受け取る無人搬送車両用の運転ゾーンが荷役設備に隣接すること、および標準貨物保持器を配送または集荷するための積み降ろしゾーンが運転ゾーンに隣接することによって達成される。これに関連する利点に関しては、先述の説明を参照されたい。
【0014】
そのために、積み降ろしゾーンと保管場所との間で標準貨物保持器を搬送するためのスタッキング装置を持つ貨物保持器保管場所が積み降ろしゾーンに隣接することが有利である。貨物保持器保管場所は標準貨物保持器の中間保管を可能にする。
【0015】
標準貨物保持器をトラックに積み降ろしするための道路移載ゾーンが保管場所に隣接することが特に有利である。こうして、貨物保持器保管場所はレールおよび道路両方の移載ゾーンに連携される。
【0016】
柔軟性および移載性能を高めるために、無人搬送車両は各々昇降台を装備し、標準貨物保持器を無人搬送車両の昇降台に載置するかそこから受け取るために、積み降ろしゾーンに支持フレームが配置される。
【0017】
設計上の観点から、荷役設備およびスタッキング装置をブリッジまたはガントリクレーンのように形成することが有利である。
【0018】
標準貨物保持器の向きは、荷役設備および/またはスタッキング装置によって運搬されている標準貨物保持器を垂直軸周りに旋回させることができることにより、反転流に適応させることができる。
【0019】
設計上の観点から、荷役設備および/またはスタッキング装置は、昇降方向に延在する剛性マストがその上を案内されるクレーンガーダに沿ってトロリ軌道方向に移動可能なクレーントロリを有することが有利である。それは、クレーントロリに取り付けられた少なくとも1つの昇降装置を介して、ケーブルによって昇降方向に移動可能であり、その端部に標準貨物保持器用の荷重テークアップ装置が取り付けられる。1つの展開では、マストは、クレーントロリに対して垂直枢軸を中心に旋回することができる。
【0020】
レール軌道が吊架線を装備する場合、荷役設備の荷重テークアップ装置はマストから横方向に偏位して配置される。
【0021】
標準貨物保持器の安定した案内は、第1ガーダおよび第2ガーダから構成されたクレーンガーダであって、第1ガ−ダおよび第2ガーダ上にトロリ軌道が位置し、トロリ軌道上をクレーントロリがトロリ軌道方向に移動することができ、第1ガーダおよび第2ガーダがトロリ軌道方向に対し直角に走るクレーン走行方向に互いに間隔を置いて配置されて成るクレーンガーダによって達成される。
【0022】
本発明の幾つかの展開を図面に示し、以下で説明する。
【図面の簡単な説明】
【0023】
【図1】道路とレール移載ゾーンとの間のISOコンテナおよびスワップボディのような標準貨物保持器のための移載システムの概略平面図である。
【図2】図1のレール移載ゾーン領域の部分拡大図である。
【図3】図2の側面図である。
【図4】レール移載ゾーンの代替的展開の図2に相応する図である。
【図5】レール移載ゾーンの別の代替的展開の図2に相応する図である。
【図6】代替的展開の荷役設備の側面図である。
【図7】道路とレール移載ゾーンとの間のISOコンテナおよびスワップボディのような標準貨物保持器のための移載システムの図1から拡張された概略平面図である。
【発明を実施するための形態】
【0024】
図1は、レール移載ゾーン3と道路移載ゾーン4との間を搬送される、ISOコンテナおよびスワップボディのような標準貨物保持器2のための移載システム1の概略平面図を示す。概略平面図は移載システム1の一部分しか示さないが、基本的な構成要素を識別している。移載システム1は、貨物保持器保管場所5を介して接続されたレール移載ゾーン3および道路移載ゾーン4から構成される。貨物保持器保管場所5は、標準貨物保持器2の中間保管所として働く。
【0025】
レール移載ゾーン3は本質的に、第1レール軌道3a、間隔を置いて配置された平行な第2レール軌道3b、および割り当てられた荷役設備6から構成される。第1および第2軌道3aおよび3b上を、鉄道車両7が標準貨物保持器2の内向きおよび外向き搬送のために移動することができる。荷役設備6は、第1および第2軌道3aおよび3bのみならず移載ゾーン8をも跨ぐブリッジまたはガントリクレーンとして展開される。移載ゾーン8では、無人搬送車両9を乗り入れまたは退出することができる。
【0026】
無人搬送車両9は、2個の20´コンテナ、1個の40´コンテナ、または1個の45´コンテナを搬送するのに適する。荷役設備6を用いて、標準貨物保持器は、移載ゾーン8に位置する無人搬送車両9と鉄道車両7との間で移載される。
【0027】
ブリッジまたはガントリクレーンとして展開される荷役設備6は基本的に、第1および第2軌道3aおよび3bに沿ってレール10上を軌道方向Gに移動することのできるクレーンガーダ11から構成される。レール10は軌道3a、3bと平行に走る。クレーンガーダ11上で、荷役設備6の駆動方向と一致する軌道方向Gを横切って、クレーントロリ12はトロリ軌道方向Kに移動することができる。クレーントロリ12に、マスト13が吊設され、それは、その下端13aに取り付けられた荷重テークアップ装置14によって標準貨物保持器2を受け取りかつ解放するために、垂直方向にかつクレーントロリ12に対して昇降することができる。
【0028】
荷役設備6の展開に応じて、標準貨物保持器2の向きは無人搬送車両9と鉄道車両7との間の移載中に維持され、あるいは必要ならば垂直軸を中心に旋回する。手元の図1による概略平面図で、鉄道車両7上の標準貨物保持器2は軌道方向Gに向けられ、長手軸を持つ無人搬送車両9はそれらに対して90度旋回する。それに対応して、荷役設備6はこの目的のために回転装置26を有する。
【0029】
移載ゾーン8は第2軌道3bの側面に沿って配置される。図示する例では、この移載ゾーン8は基本的に支持フレーム8aから構成され、鉄道車両7から降ろされた標準貨物保持器2は、中間保管のために支持フレーム8a上に配置することができ、あるいは荷役設備6によって支持フレーム8aから受け取り、かつ/または無人搬送車両9が標準貨物保持器2を荷役設備6に配送するかそこから受け取るために待機することのできる隣接駐車場所8bから受け取ることができる。無人搬送車両9は各々、昇降台9aを下降した無人搬送車両9が支持フレーム8a内に乗り入れ、こうして標準貨物保持器2が無人搬送車両に載置された状態で駆動することができるように、昇降台9aを装備する。
【0030】
標準貨物保持器2を受け取るために、昇降台9aは次いで上昇し、標準貨物保持器2は支持フレーム8aから持ち上げられる。無人搬送車両9は次いで、昇降台9aが上昇しかつ標準貨物保持器2がそこに載置されたまま駆動して支持フレーム8aから離れ、次いで昇降台9aを下降させ、その駆動を続ける。支持フレーム8a上への標準貨物保持器2の配置は、逆の順序で実行される。
【0031】
移載ゾーン8は、無人搬送車両9が自動運転で乗り入れる運転ゾーン15に隣接する。この運転ゾーン15に隣接して、かつ好ましくは移載ゾーン8の反対側に、貨物保持器保管場所5への接合部分を形成する積み降ろしゾーン16が位置する。
【0032】
この積み降ろしゾーン16では、さらなる荷役に備えて標準貨物保持器2をそこに一時的に保管するために、再び支持フレームが配設される。標準貨物保持器2を支持フレーム16a無しに無人搬送車両9により直接移載するために、そこにも無人搬送車両9用の場所を設けることができる。積み降ろしゾーン16では、支持フレーム16aは、貨物保持器保管場所5で動作しかつブリッジまたはガントリクレーンの形を取るスタッキング装置17によって、標準貨物保持器2を積み降ろしされる。
【0033】
貨物保持器保管場所5は、平行に横並びにかつ列を成して配置される多数の貨物保持器保管ゾーン5cから構成される。それらのレール側端部5aに、各々が積み降ろしゾーン16を有し、それらの道路側端部5bは保管および取出しゾーン18に関連付けられる。各貨物保持器保管ゾーン5cは、貨物保持器保管ゾーン5cに沿ってレール19上をクレーン移動方向に移動することのできる1つまたは幾つかのスタッキング装置17を割り当てられる。スタッキング装置17は、貨物保持器保管ゾーン5cと積み降ろしゾーン16または保管および取出しゾーン18との間で標準貨物保持器2を搬送する。各貨物保持器保管ゾーン5cは、1つ以上のスタッキング装置17に加えて、標準貨物保持器2用の留置ゾーン5dをも有する。留置ゾーン5dは矩形の床空間を有し、その上に標準貨物保持器2が行および列を成して配置される。
【0034】
最高5個までの標準貨物保持器2が互いに上下に積み重ねて保管される。留置された標準貨物保持器2はそれらの長辺を基本的にレール19と平行に、かつしたがってスタッキング装置17のクレーン走行方向に配向される。標準貨物保持器2のこの配向は、必要なアラインメント修正に加えて受取りまたは預託中に、スタッキング装置17が標準貨物保持器2を旋回させる必要がないように、発着するトラック20が存在する積み降ろしゾーン18でも見ることができる。原則として、水平面内で標準貨物保持器2の向きを変えるための旋回機構をスタッキング装置17に装備することも可能である。スタッキング装置17の設計は基本的に荷役設備6の設計に対応する。
【0035】
貨物保持器保管場所5のレール側端部5aでは、標準貨物保持器2が保管および取出しゾーン16でスタッキング装置17によって支持フレーム16a上に配置され、あるいはそこから取り出される。保管および取出しゾーン16はレール移載ゾーン3への接合部分として働き、横に並べて配置された標準貨物保持器2用の幾つかの支持フレーム16aを有し、一時的に保管された標準貨物保持器2を受け取るため、またはそれらをそこに留置するために、昇降台9a付きの無人搬送車両9がそこに乗り入れることができる。また、コンテナ2をスタッキングクレーン17[訳注:これ以外では常に「スタッキング装置17」と呼ばれている]によって台から直接受け取り、またはそこに配置することもできる。その場合、支持フレーム16aは存在せず、無人搬送車両9は昇降テーブルを持たない。
【0036】
図2は、図1のレール移載ゾーン3領域の部分拡大図を示す。この部分拡大図では、無人搬送車両9用の駐車場所8bが支持フレーム8aの間に示されていない。セミガントリクレーンの形の荷役設備6は、レール10に沿って軌道方向Gに横行することができる。セミガントリクレーン構造に対応して、2本のレール10のうちの1本、すなわち第1軌道3aに隣接する方のレール10は、軌道3a、3bとほぼ同一高さレベルに配置される。対向するレール10は、無人搬送車両9が交差することなく支持フレーム8aおよび/または駐車場所8bに乗り入れまたはそこから退出することができるように、高架にされる。
【0037】
クレーントロリ12は基本的に矩形のベースフレーム12aから構成され、その四隅にクレーンガーダ12のトロリ軌道上を走行するトロリ走行装置21が配置される。クレーントロリ9のベースフレーム9aは中心領域に開口を有し、そこを回転管26が通過する。回転管26は、クレーントロリ12のベースフレーム12aの旋回継手26aを介してその頂端で支持され、旋回継手26aを介して垂直回転軸周りに旋回させることができる。マスト13は回転管22の内側を走り、そこで案内される。
【0038】
図2はまた、クレーンガーダ11が、レール方向Gに見て1つの高さレベルで縦一列に互いに間隔を置いて配置された第1ガーダ11aおよび第2ガーダ11bを含むように設計されていることをも示す。
【0039】
図3は図2の側面図である。第1ガーダ11aおよび第2ガーダ11bは各々三角形の断面を有することが見て取れる。この三角形の断面は、11cの頂点領域の角度が約30°の二等辺三角形の形状を有する。トロリレール22は、第1ガーダ11aおよび第2ガーダ11bの頂点領域11cの各々に取り付けられる。クレーントロリ12はこれらのレール上をトロリ軌道方向Kに横行することができる。この正面領域で、セミガントリ設計に対応して、レール10は支持体23を介して高架にされ、第1ガーダ11aおよび第2ガーダ11bの[ドイツ語では1つ以上の語が欠落しており、図3によると、それは「ベース」または「ベースプレート」であるかもしれない]は、ベースガーダ25aによって接続され、クレーン走行機構24を介してレール10上に直接支持される。また、セミガントリ設計に対応して、後部領域で、第1ガーダ11aおよび第2ガーダ11bの端部が、2つの垂直ガーダ25bを介してクレーン横行機構24に支持される。2つの垂直ガーダ25bの下端は、別のベースガーダ25aを介してU字状に接続される。
【0040】
図3はまた、旋回継手26aおよび回転管26をも示す。回転管16のための駆動装置として、その外側の周りを走るリングギヤが設けられ、電気モータ・ロータリ・アクチュエータと係合する。マスト13を昇降方向Hに移動させるために、矩形の昇降枠27(図6参照)が回転管26の下端に不動に取り付けられる。マスト13用の昇降装置28はクレーントロリ12の昇降枠27上に位置する。
【0041】
昇降装置28は、駆動モータ28cによって駆動される共通トランスミッションに同軸的に軸受装着された、第1ケーブルドラム28aおよび第2ケーブルドラム(図示せず)を有する。第1ケーブル29aおよび第2ケーブル29b(図3には図示せず)は、第1ケーブルドラム28aから繰り出される。第3ケーブル29cおよび第4ケーブル29d(同じく図3には図示せず)は、第2ケーブルドラムから繰り出される。相応して、4本のケーブル29が存在し、それらは第1または第2ケーブルドラム28aから垂直方向下向きに直接繰り出されるか、あるいはマスト13の反対側に水平方向に案内され、そこから水平回転軸を持つコーナプーリを介して90°垂直方向下向きに転向する。ケーブル29の端部は荷重テークアップ装置14に接続される。
【0042】
図4は、基本的に図2に示したものに相応する代替的展開におけるレール移載ゾーン3の図を示す。ここでも平行に走る2本の第1および第2レール軌道3a、3bが、その上を移動することのできる鉄道車両7のみならず、軌道の方向に平行に走る荷役設備6用のレール10と共に見て取れる。ここで、軌道3a、3bとレール11との間の運転ゾーン15に乗り入れまたはそこから退出するために、無人搬送車両9はレール11を横断する必要がないので、荷役設備6はガントリクレーンとして設計される。先に説明した通り、荷役設備6は回転管26および旋回継手26aを装備することができ、したがって荷重テークアップ装置14によって持ち上げられた標準貨物保持器を水平面内で垂直軸周りに旋回させることができる。これは、鉄道車両7から持ち上げられた標準貨物保持器2を移載ゾーン8内で支持フレーム8a上に配置し、または支持フレームから標準貨物保持器を取り出すことを可能にするために要求される。支持フレーム8aは大まかに、それらの長い寸法を軌道方向Gに対して30°の角度に配向される。したがって、無人搬送車両9は片側から支持フレーム8a内に乗り入れ、次いで標準貨物保持器2を受け取るか、またはそれらを降ろし、かつ次いで荷役設備6およびしたがってそのレール10の端部から運転ゾーン15を退去するために、反対側に退出することができる。
【0043】
図5は、レール移載ゾーン3の別の代替的展開を示す。基本的設計は図4で先述した展開と同様である。
【0044】
無人搬送車両9はここでも、レール11と軌道3a、3bとの間に位置する運転ゾーンに乗り入れる。しかし、中間保管のための支持フレーム8aおよび標準貨物保持器2は運転ゾーンの中心に軌道3a、3bと平行に向けられるので、荷役設備6に回転管26および旋回継手26aを持つ構成は不要である。
【0045】
図6はさらに、ガントリクレーン設計における荷役設備6の側面図を示す。詳細な説明は、図2および図3について行なった先の説明を参照されたい。著しい相違として、ここでは第1ガーダ11aおよび第2ガーダ11bが垂直支持体を介してクレーン横行機構24に支持されることが見て取れる。垂直支持体25bの下端は、それらを接続する水平ベースガーダ25aを介して安定化する。
【0046】
図6はさらに、荷重テークアップ装置14が、マスト13の下端13aに不動に取り付けられた吊りフレーム14aと、チェーン14cを介して吊りフレーム14に吊設されたスプレッダフレーム14bとに分割されることを示す。図6はまた、コンテナ状レセプタクル31が第2ガーダ11bの外側に取り付けられ、その中に荷役設備6用の制御および電源電気または電子部品が配設されることをも示す。
【0047】
移載ゾーン3内で直線状に走る第1および第2軌道3aおよび3bの間に、第1および第2軌道3a、3bより上に吊架線を各々担持する、種々の吊架線支持体を通常配置することができる。荷役設備6はその場合、横方向片持ち荷重テークアップ装置14を有する。
【0048】
図7は、図1から拡張された移載システムの概略平面図を示す。したがって概略平面図は、図1に係る概略平面図の全ての基本的要素、例えばレール移載ゾーン3、第1および第2軌道3a、3b、貨物保持器保管場所5、荷役設備6、移載ゾーン8、支持フレーム8a、無人搬送車両9、積み降ろしゾーン16、およびスタッキング装置17を示す。
【0049】
横に並べて平行に配置された種々の貨物保持器保管場所5も示される。
【0050】
図1と比較して、道路移載ゾーン4はより詳細に示されている。貨物保持器保管場所5の道路側端部5bで、標準貨物保持器2は保管および取出しゾーン18でスタッキング装置17によって、そこに位置する駐車場所18aに駐車したトラック20上に配置されるか、またはそこから取り出される。保管および取出しゾーン18は道路移載ゾーン4への接合部分であり、横に並べて配置されるトラック20用の幾つかの駐車場所18aを有する。
【0051】
加えて、レール移載ゾーン3の方を向いた無人搬送車両9用の積み降ろしゾーン16を有する多くの貨物保持器保管場所5に隣接して、配送場所32が配置される。貨物保持器保管場所5に関して、積み降ろしゾーン16は貨物保持器2の中間保管のための支持フレーム16aを装備する。加えて、配送場所32は、トラック20を介する貨物保持器2の内向きおよび外向きの搬送のための道路4aを持つ道路移載場所4の方を向いた、保管および取出し場所18を備える。保管および取出しゾーン18は、これらの駐車場所18aに後ろ向きに入るトラック20用に横に並んで平行に配置された駐車場所18aを有する。
【符号の説明】
【0052】
1 移載システム
2 標準貨物保持器
3 レール移載ゾーン
3a 第1軌道
3b 第2軌道
4 道路移載ゾーン
4a 道路
5 貨物保持器保管場所
5a レール側端部
5b 道路側端部
5c 貨物保持器保管ゾーン
6 荷役設備
7 鉄道車両
8 移載ゾーン
8a 支持フレーム
8b 駐車空間
9 無人搬送車両
9a 昇降台
10 レール
11 クレーンガーダ
11a 第1ガーダ
11b 第2ガーダ
11c 頂部
12 クレーントロリ
12a ベースフレーム
13 マスト
13a マストの下端
14 荷重テークアップ装置
14a 懸吊フレーム
14b スプレッダフレーム
14c チェーン
15 運転ゾーン
16 積み降ろしゾーン
16a 支持フレーム
17 スタッキング装置
18 保管および取出しゾーン
18a 駐車空間
19 レール
20 トラック
21 トロリ走行装置
22 トロリレール
23 支持体
24 クレーン走行機構
25a ベースガーダ
25b 垂直支持体
26 回転管
26a 旋回継手
27 昇降枠
28 昇降装置
28a 第1ケーブルドラム
28b トランスミッション
28c 駆動モータ
29 ケーブル
30 コーナプーリ
31 コンテナ
32 配送場所
G 軌道方向
H 昇降方向
K トロリ軌道方向
【特許請求の範囲】
【請求項1】
標準貨物保持器をレール移載ゾーンの荷役設備によって鉄道車両に積み込みまたはそこから受け取るようにした、レールと道路との間で標準貨物保持器、特にISOコンテナおよびスワップボディを移載するための方法であって、前記標準貨物保持器(2)が前記荷役設備(6)によって無人搬送車両(9)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記無人搬送車両(9)によって前記荷役設備(6)と積み降ろしゾーンとの間で搬送されることを特徴とする方法。
【請求項2】
前記標準貨物保持器(2)が前記積み降ろしゾーン(16)でスタッキング装置(17)によって前記無人搬送車両(9)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記スタッキング装置(17)によって前記無人搬送車両(9)と貨物保持器保管場所(5)との間で搬送されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記標準貨物保持器(2)が道路移載ゾーン(4)で前記スタッキング装置(17)によってトラック(20)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記スタッキング装置(17)によって前記積み降ろしゾーン(16)と前記保管場所(5)との間で搬送されることを特徴とする、請求項2に記載の方法。
【請求項4】
前記積み降ろしゾーン(16)の前記標準貨物保持器(2)が、昇降台(9a)を装備した前記無人搬送車両(9)によって支持フレーム(16a)上に降ろされることを特徴とする、請求項1ないし3の一項に記載の方法。
【請求項5】
支持フレーム(16a)上に載置された前記標準貨物保持器(2)が追加的無人搬送車両(9)によってさらに搬送されることを特徴とする、請求項4に記載の方法。
【請求項6】
鉄道線路に隣接するレール移載ゾーンで標準貨物保持器を鉄道車両に積み降ろしするための荷役設備により、標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するためのシステムであって、前記標準貨物保持器を前記荷役設備に運び、または前記標準貨物保持器を前記荷役設備から受け取る無人搬送車両(9)のための運転ゾーン(15)が前記荷役設備(6)に隣接し、かつ標準貨物保持器(2)の内向きまたは外向き搬送のための積み降ろしゾーン(16)が前記運転ゾーン(15)に隣接することを特徴とするシステム。
【請求項7】
前記標準貨物保持器(2)を前記積み降ろしゾーン(16)と積み降ろしゾーン(16)に隣接する保管場所(5)との間で搬送するためのスタッキング装置(17)を備えた貨物保持器保管場所(5)を特徴とする、請求項6に記載のシステム。
【請求項8】
前記標準貨物保持器(2)をトラック(20)に積み降ろしするための道路移載ゾーン(4)が前記保管場所(5)に隣接することを特徴とする、請求項7に記載のシステム。
【請求項9】
前記無人搬送車両(9)が各々昇降台(9a)を装備し、前記標準貨物保持器(2)を前記無人搬送車両(9)の昇降台(9a)に配置するか、または前記昇降台(9a)から受け取るために前記積み降ろしゾーン(16)に支持フレーム(8a、16a)が配置されることを特徴とする、請求項6ないし8の一項に記載のシステム。
【請求項10】
前記荷役設備(6)および前記スタッキング装置(17)がブリッジまたはガントリクレーンであることを特徴とする、請求項6ないし9の一項に記載のシステム。
【請求項11】
前記搬送される標準貨物保持器(2)が前記荷役設備(6)および/または前記スタッキング装置(17)によって垂直軸を中心に旋回することを特徴とする、請求項6ないし10の一項に記載のシステム。
【請求項12】
前記荷役設備(6)および/または前記スタッキング装置(17)が、クレーンガーダ(11)に沿ってトロリ軌道方向(K)に移動可能なクレーントロリ(12)を有し、その上を昇降方向(H)に延在する剛性マスト(13)が案内され、前記マストが、前記クレーントロリ(12)に取り付けられた少なくとも1つの昇降装置(28)を介してケーブル(29)によって昇降方向(H)に移動可能であり、前記マストの下端に前記標準貨物保持器(2)用の荷重テークアップ装置(14)が取り付けられることを特徴とする、請求項6ないし10の一項に記載のシステム。
【請求項13】
前記荷役設備(6)の荷重テークアップ装置(14)が前記マスト(13)から横方向に偏位していることを特徴とする、請求項12に記載のシステム。
【請求項14】
前記クレーンガーダ(11)が第1ガーダ(11a)および第2ガーダ(11b)から構成され、前記第1ガ−ダおよび前記第2ガーダ上にトロリ軌道(22)が配置され、前記トロリ軌道上を前記クレーントロリ(12)がトロリ軌道方向(K)に移動することができ、かつ前記第1ガーダ(11a)および前記第2ガーダ(11b)が、前記トロリ軌道方向(K)に対して直角に走るクレーン走行方向に互いに間隔を置いて配置されることを特徴とする、請求項12または13に記載のシステム。
【請求項15】
前記マスト(13)が前記クレーントロリ(12)に対して垂直回転軸を中心に旋回可能であることを特徴とする、請求項12ないし14の一項に記載のシステム。
【請求項1】
標準貨物保持器をレール移載ゾーンの荷役設備によって鉄道車両に積み込みまたはそこから受け取るようにした、レールと道路との間で標準貨物保持器、特にISOコンテナおよびスワップボディを移載するための方法であって、前記標準貨物保持器(2)が前記荷役設備(6)によって無人搬送車両(9)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記無人搬送車両(9)によって前記荷役設備(6)と積み降ろしゾーンとの間で搬送されることを特徴とする方法。
【請求項2】
前記標準貨物保持器(2)が前記積み降ろしゾーン(16)でスタッキング装置(17)によって前記無人搬送車両(9)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記スタッキング装置(17)によって前記無人搬送車両(9)と貨物保持器保管場所(5)との間で搬送されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記標準貨物保持器(2)が道路移載ゾーン(4)で前記スタッキング装置(17)によってトラック(20)に積み込まれまたはそこから受け取られ、かつ前記標準貨物保持器(2)が前記スタッキング装置(17)によって前記積み降ろしゾーン(16)と前記保管場所(5)との間で搬送されることを特徴とする、請求項2に記載の方法。
【請求項4】
前記積み降ろしゾーン(16)の前記標準貨物保持器(2)が、昇降台(9a)を装備した前記無人搬送車両(9)によって支持フレーム(16a)上に降ろされることを特徴とする、請求項1ないし3の一項に記載の方法。
【請求項5】
支持フレーム(16a)上に載置された前記標準貨物保持器(2)が追加的無人搬送車両(9)によってさらに搬送されることを特徴とする、請求項4に記載の方法。
【請求項6】
鉄道線路に隣接するレール移載ゾーンで標準貨物保持器を鉄道車両に積み降ろしするための荷役設備により、標準貨物保持器、特にISOコンテナおよびスワップボディをレールと道路との間で移載するためのシステムであって、前記標準貨物保持器を前記荷役設備に運び、または前記標準貨物保持器を前記荷役設備から受け取る無人搬送車両(9)のための運転ゾーン(15)が前記荷役設備(6)に隣接し、かつ標準貨物保持器(2)の内向きまたは外向き搬送のための積み降ろしゾーン(16)が前記運転ゾーン(15)に隣接することを特徴とするシステム。
【請求項7】
前記標準貨物保持器(2)を前記積み降ろしゾーン(16)と積み降ろしゾーン(16)に隣接する保管場所(5)との間で搬送するためのスタッキング装置(17)を備えた貨物保持器保管場所(5)を特徴とする、請求項6に記載のシステム。
【請求項8】
前記標準貨物保持器(2)をトラック(20)に積み降ろしするための道路移載ゾーン(4)が前記保管場所(5)に隣接することを特徴とする、請求項7に記載のシステム。
【請求項9】
前記無人搬送車両(9)が各々昇降台(9a)を装備し、前記標準貨物保持器(2)を前記無人搬送車両(9)の昇降台(9a)に配置するか、または前記昇降台(9a)から受け取るために前記積み降ろしゾーン(16)に支持フレーム(8a、16a)が配置されることを特徴とする、請求項6ないし8の一項に記載のシステム。
【請求項10】
前記荷役設備(6)および前記スタッキング装置(17)がブリッジまたはガントリクレーンであることを特徴とする、請求項6ないし9の一項に記載のシステム。
【請求項11】
前記搬送される標準貨物保持器(2)が前記荷役設備(6)および/または前記スタッキング装置(17)によって垂直軸を中心に旋回することを特徴とする、請求項6ないし10の一項に記載のシステム。
【請求項12】
前記荷役設備(6)および/または前記スタッキング装置(17)が、クレーンガーダ(11)に沿ってトロリ軌道方向(K)に移動可能なクレーントロリ(12)を有し、その上を昇降方向(H)に延在する剛性マスト(13)が案内され、前記マストが、前記クレーントロリ(12)に取り付けられた少なくとも1つの昇降装置(28)を介してケーブル(29)によって昇降方向(H)に移動可能であり、前記マストの下端に前記標準貨物保持器(2)用の荷重テークアップ装置(14)が取り付けられることを特徴とする、請求項6ないし10の一項に記載のシステム。
【請求項13】
前記荷役設備(6)の荷重テークアップ装置(14)が前記マスト(13)から横方向に偏位していることを特徴とする、請求項12に記載のシステム。
【請求項14】
前記クレーンガーダ(11)が第1ガーダ(11a)および第2ガーダ(11b)から構成され、前記第1ガ−ダおよび前記第2ガーダ上にトロリ軌道(22)が配置され、前記トロリ軌道上を前記クレーントロリ(12)がトロリ軌道方向(K)に移動することができ、かつ前記第1ガーダ(11a)および前記第2ガーダ(11b)が、前記トロリ軌道方向(K)に対して直角に走るクレーン走行方向に互いに間隔を置いて配置されることを特徴とする、請求項12または13に記載のシステム。
【請求項15】
前記マスト(13)が前記クレーントロリ(12)に対して垂直回転軸を中心に旋回可能であることを特徴とする、請求項12ないし14の一項に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−511486(P2012−511486A)
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2011−538984(P2011−538984)
【出願日】平成21年11月30日(2009.11.30)
【国際出願番号】PCT/EP2009/066085
【国際公開番号】WO2010/066602
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(504346570)ゴットヴァルト ポート テクノロジー ゲーエムベーハー (14)
【氏名又は名称原語表記】GOTTWALD PORT TECHNOLOGY GMBH
【住所又は居所原語表記】Forststrasse 16,40597 Dusseldorf,Germany
【Fターム(参考)】
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【国際出願番号】PCT/EP2009/066085
【国際公開番号】WO2010/066602
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(504346570)ゴットヴァルト ポート テクノロジー ゲーエムベーハー (14)
【氏名又は名称原語表記】GOTTWALD PORT TECHNOLOGY GMBH
【住所又は居所原語表記】Forststrasse 16,40597 Dusseldorf,Germany
【Fターム(参考)】
[ Back to top ]