
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、標高検出装置および自車位置判定装置に係り、特に、自車両が走行している地点の標高を検出するのに好適な標高検出装置および自車位置判定装置に関する。
【背景技術】
【0002】
従来から、車載用ナビゲーション装置においては、主としてGPS(Global Positioning System)によって、緯度、経度および標高からなる自車両が走行している地点の三次元位置を測位し、測位結果に基づいて、自車両が地図データ上のどの道路を走行中であるかを判定し、必要があれば自車位置を地図データ上の該当する道路上の位置に補正するマップマッチングを行うようになっていた。
【0003】
ところで、GPSを用いた三次元位置の測位は、垂直(高さ)方向の精度が水平方向の精度よりも低く、10mの単位で誤差が生じる場合があったため、例えば、自車両が二階建て道路における下階の道路を通る場合に、誤って上階の道路にマッチングされてしまうといった不具合があった。
【0004】
そこで、自車両が走行している地点の標高を高精度に検出して自車位置の判定精度を向上させる観点から、これまでにも、例えば、自車両が第1の地点から第2の地点に移動する場合における第2の地点の標高を検出する方法として、第1の地点の標高を基準として、第1の地点から第2の地点までの自車両の垂直方向の移動量を、加速度センサを用いて累積的に検出し、検出結果を第1の地点の標高に加算することによって第2の地点の標高を検出することが行われていた。
【0005】
【特許文献1】特開平11−287665号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前述した加速度センサを用いて第2の地点の標高を検出する方法であっても、基準となる第1の地点の標高自体が、垂直方向の精度が低いGPS等によって検出されたものであったため、第2の地点における標高を高精度に検出することは非常に困難であった。
【0007】
また、加速度センサ自体にも、外乱による影響や、個々の性能のばらつきや誤差などの正確な垂直方向の移動量の検出を妨げる阻害要因が存在していたため、理論通りに自車両の加速度の垂直成分に対する積分を計算したとしても、必ずしも垂直方向の移動量を正確に検出することはできなかった。
【0008】
したがって、自車両が走行している地点の標高を高精度に検出することによって自車位置の判定精度を向上させるといった懸案事項については、未だに有効な解決策が提案されていないのが実情であった。
【0009】
そこで、本発明は、このような点に鑑みなされたものであり、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる標高検出装置および自車位置判定装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
前述した目的を達成するため、本発明に係る標高検出装置は、自車両が走行している地点の標高を検出する標高検出装置であって、前記自車両の二次元位置を検出する二次元位置検出手段と、前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段とを備えたことを特徴としている。
【0011】
そして、このような構成によれば、自車両が地表面上を走行している第1の区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出することが可能となり、自車両が立体構造物上を走行している第2の区間においては、垂直方向移動量検出手段によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出することが可能となる。
【0012】
また、本発明に係る他の標高検出装置は、前記垂直方向移動量検出手段が、加速度センサを有することを特徴としている。
【0013】
そして、このような構成によれば、加速度センサの検出結果である自車両の加速度の垂直成分を二回積分することによって、自車両の垂直方向の移動量を簡便に検出することが可能となる。
【0014】
さらに、本発明に係る他の標高検出装置は、前記二次元位置検出手段が、GPSを有することを特徴としている。
【0015】
そして、このような構成によれば、自車両の二次元位置を水平方向の精度に優れたGPSによって簡便かつ適切に検出することが可能となる。
【0016】
さらにまた、本発明に係る自車位置判定装置は、前述した標高検出装置を有し、前記標高検出装置における前記二次元位置検出手段の検出結果と前記第1または第2の標高検出手段の検出結果とからなる前記自車両の三次元位置を取得し、取得された前記三次元位置に基づいて、地図データ上の自車位置を判定するように形成されていることを特徴としている。
【0017】
そして、このような構成によれば、自車両が地表面上を走行している第1の区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、この検出された標高と自車両の二次元位置とからなる自車両の三次元位置に基づいて、自車両が地表面上を走行していると判定することが可能となる。また、自車両が立体構造物上を走行している第2の区間においては、第2の区間の直前の地表面の標高に、垂直方向移動量検出手段によって検出された当該地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正した上で加算することによって、自車両が走行している立体構造物上の地点の標高を検出し、この検出された標高と自車両の二次元位置とからなる自車両の三次元位置に基づいて、自車両が立体構造物上を走行していると判定することが可能となる。
【発明の効果】
【0018】
本発明に係る標高検出装置によれば、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる。
【0019】
また、本発明に係る他の標高検出装置によれば、加速度センサの検出結果である自車両の加速度の垂直成分を二回積分することによって、自車両の垂直方向の移動量を簡便に検出することができる結果、自車両が走行している地点の標高を簡便に検出することができる。
【0020】
さらに、本発明に係る他の標高検出装置によれば、自車両の二次元位置を水平方向の精度に優れたGPSによって簡便かつ適切に検出することができる結果、自車両が走行している地点の標高を簡便かつ高精度に検出することができる。
【0021】
さらにまた、本発明に係る自車位置判定装置によれば、自車両が走行している地点の標高を高精度に検出することによって自車位置の判定精度を向上させることができ、ひいては、自車両を適切にルート案内することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係る標高検出装置および自車位置判定装置の実施形態について、図1乃至図8を参照して説明する。
【0023】
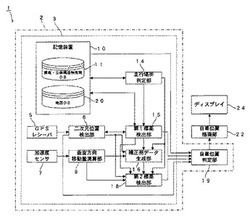
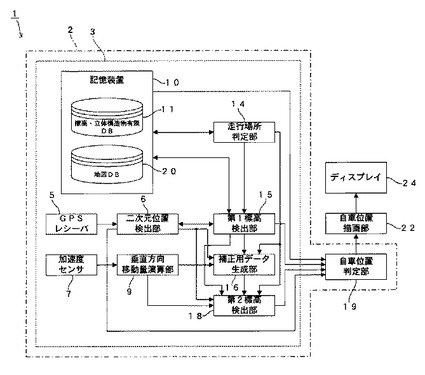
図1は、本発明に係る標高検出装置および自車位置判定装置が搭載された車載用ナビゲーション装置1を示したものである。
【0024】
本実施形態における車載用ナビゲーション装置1は、自車位置判定装置2と、この自車位置判定装置2に内蔵された標高検出装置3とを有している。
【0025】
標高検出装置3は、GPSレシーバ5を有しており、このGPSレシーバ5は、図示しないGPS衛星から、軌道および時刻に関する情報(以下、GPS情報と称する)を受信するようになっている。
【0026】
GPSレシーバ5には、このGPSレシーバ5とともに二次元位置検出手段を構成する二次元位置検出部6が接続されており、この二次元位置検出部6には、GPSレシーバ5が受信したGPS情報が入力されるようになっている。
【0027】
そして、二次元位置検出部6は、入力されたGPS情報に基づいて、自車両が走行している地点の二次元位置を、経度および緯度によって表される絶対座標として検出するようになっている。なお、二次元位置検出部6は、必要に応じて、ジャイロセンサ等の図示しない自律航法センサの検出結果に基づいて、二次元位置を相対位置として検出するようにしてもよい。
【0028】
標高検出装置3は、加速度センサ7を有しており、この加速度センサ7は、自車両の加速度を検出するようになっている。加速度センサ7は、例えば、圧電素子型の3軸加速度センサであってもよい。
【0029】
加速度センサ7には、この加速度センサ7とともに垂直方向移動量検出手段を構成する垂直方向移動量演算部9が接続されており、この垂直方向移動量演算部9には、加速度センサ7の検出結果が入力されるようになっている。
【0030】
そして、垂直方向移動量演算部9は、入力された加速度センサ7の検出結果から、自車両の加速度における垂直方向成分を取り出し、この垂直方向成分の加速度に対する積分を行うことによって、自車両の垂直方向の移動量(以下、垂直移動量と略称する)を検出するようになっている。
【0031】
さらに、本実施形態において、標高検出装置3は、標高データ管理手段および立体構造物有無データ管理手段として機能する記憶装置10を有しており、この記憶装置10には、地表面の標高を示す標高データおよび自車両が走行可能な立体構造物の有無を示す立体構造物有無データのデータベース(以下、標高・立体構造物有無DB11と称する)が記憶されている。
【0032】
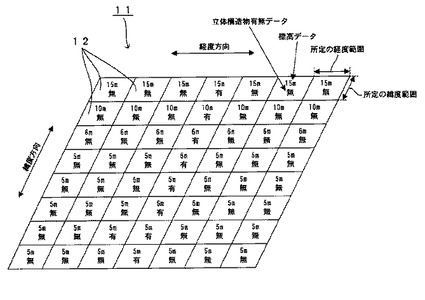
図2に示すように、標高・立体構造物有無DB11には、標高データが、複数個のメッシュ12ごとに管理された状態として格納されている。なお、本実施形態におけるメッシュ12は、地表面を所定の緯度範囲および所定の経度範囲ごとに分割することによって形成されてなる前記所定の緯度範囲および前記所定の経度範囲によって囲まれた矩形領域とされており、このメッシュ12は、標高データおよび後述する立体構造物有無データの管理単位とされている。
【0033】
図2は、1個のメッシュ12に、図2において「5m」、「10m」等の文字で表された1個の標高データが割り当てられた状態として格納されていること、換言すれば、各メッシュ12に割り当てられている標高データが、各メッシュ12のそれぞれに対応する地表面の標高であることを示している。
【0034】
なお、前記所定の緯度範囲および前記所定の経度範囲は、それぞれ、例えば、5〜10mに相当する緯度範囲および経度範囲であってもよい。
【0035】
さらに、標高・立体構造物有無DB11には、立体構造物有無データが、メッシュ12ごとに管理された状態として格納されている。なお、図2は、1つのメッシュ12に、図2において「有」または「無」の文字で表された1つの立体構造物有無データが割り当てられた状態として格納されていること、換言すれば、各メッシュ12に割り当てられている立体構造物有無データが、各メッシュ12に対応する地表面の上方または下方に自車両が走行することが可能な立体構造物が存在することの有無を示す情報であることを示している。自車両が走行可能な立体構造物としては、二階建て道路、橋梁、自走式の立体駐車場および自走式の地下駐車場等が挙げられる。
【0036】
二次元位置検出部6および記憶装置10には、判定手段としての走行場所判定部14が接続されている。この走行場所判定部14は、二次元位置検出部6によって検出された二次元位置(以下、検出二次元位置と称する)および標高・立体構造物有無DB11に格納された検出二次元位置に対応するメッシュ12についての立体構造物有無データを用いることにより、現在車両が地表面上を走行しているかまたは立体構造物上を走行しているかを判定するようになっている。
【0037】
二次元位置判定部6、走行場所判定部14および記憶装置10には、第1の標高検出手段としての第1標高検出部15が接続されている。この第1標高検出部15は、走行場所判定部14によって自車両が地表面上を走行していると判定されている第1の区間(以下、地表面走行区間と称する)においては、標高・立体構造物有無DB11から検出二次元位置に対応するメッシュ12についての標高データを取得することによって、自車両が走行している地表面上の地点の標高を検出するようになっている。
【0038】
二次元位置検出部6、垂直方向移動量演算部9、走行場所判定部14および第1標高検出部15には、補正用データ生成手段としての補正用データ生成部16が接続されている。
【0039】
この補正用データ生成部16は、地表面走行区間において、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量検出手段の検出結果としての垂直方向移動量演算部9の演算結果(垂直移動量)についての検出二次元位置の変化にともなう推移とを比較するようになっている。
【0040】
そして、補正用データ生成部16は、その比較結果に基づいて、地表面走行区間の直後の走行場所判定部14によって自車両が立体構造物上を走行していると判定される第2の区間(以下、立体構造物走行区間と称する)における垂直方向移動量演算部9の演算結果を補正するための補正用データを生成するようになっている。
【0041】
二次元位置検出部6、垂直方向移動量演算部9、走行場所判定部14、第1標高検出部15および補正用データ生成部16には、第2の標高検出手段としての第2標高検出部18が接続されている。
【0042】
この第2標高検出部18は、地表面走行区間の直後の立体構造物走行区間において、自車両が走行している立体構造物上の地点の標高を検出するようになっている。
【0043】
この立体構造物上の地点の標高の検出に際して、第2標高検出部18は、まず、立体構造物走行区間において垂直方向移動量演算部9が演算した立体構造物走行区間の直前の地表面すなわち地表面走行区間における立体構造物走行区間に隣接する地表面からの立体構造物走行区間における垂直移動量を、補正用データ生成部16によって生成された補正用データを用いて補正するようになっている。
【0044】
そして、第2標高検出部18は、補正後の垂直移動量(以下、補正後垂直移動量と称する)を、当該立体構造物走行区間の直前の地表面についての第1標高検出部15によって検出された標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出するようになっている。
【0045】
このような構成を有する標高検出装置3は、さらに、二次元位置検出部6、第1標高検出部15、第2標高検出部18および記憶装置10に接続された自車位置判定部19と、記憶装置10に記憶された地図データベース(以下、地図DB20と称する)とによって、前述した自車位置判定装置2を構成している。
【0046】
自車位置判定部19は、二次元位置検出部6の検出結果と第1標高検出部15または第2標高検出部18の検出結果とからなる自車両の三次元位置を取得し、取得された三次元位置に基づいて、地図データ上の三次元の自車位置を判定するようになっている。この自車位置の判定の際に、自車位置判定部19は、地図DB20に格納された地図データを用いてマップマッチングを行うようになっている。
【0047】
なお、地図DB20内の地図データは、道路の標高を含めた道路の三次元位置データを有するものであってもよい。そのようにすれば、二次元位置検出部6の検出結果と第1標高検出部15または第2標高検出部18の検出結果とからなる自車両の三次元位置と、地図DB20内の道路の三次元位置データとを比較することによって、マップマッチングを更に高精度に行うことが可能となる。
【0048】
したがって、本実施形態によれば、地表面走行区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、この検出された標高と地表面走行区間における検出二次元位置とからなる自車両の三次元位置に基づいて、自車両が地表面上を走行していると判定することができ、地図データにおける地表面上の道路に自車位置をマッチングさせることができる。
【0049】
また、立体構造物走行区間においては、立体構造物走行区間の直前の地表面の標高に、立体構造物走行区間において垂直方向移動量演算部9が演算した当該直前の地表面からの垂直移動量を、補正用データを用いて補正した上で加算することによって、自車両が走行している立体構造物上の地点の標高を検出することができる。
【0050】
そして、この検出された標高と立体構造物走行区間における検出二次元位置とからなる自車両の三次元位置に基づいて、自車両が立体構造物上を走行していると判定することができ、地図データにおける立体構造物上の道路に自車位置をマッチングさせることができる。なお、立体構造物上の道路のデータが地図データにない場合であっても、自車位置が地表面上の道路にミスマッチングしてしまうことは防止することができる。
【0051】
上記構成の他にも、自車位置判定装置2における自車位置判定部19には、自車位置描画部22が接続されており、この自車位置描画部22には、ディスプレイ24が接続されている。
【0052】
自車位置描画部22は、自車位置判定部19の判定結果に基づいて、ルート案内等の際に、ディスプレイ6に描画される自車位置周辺の地図上に、自車位置を示すマークを重ねて描画するようになっている。
【0053】
次に、本実施形態の作用について図3乃至図8を参照して説明する。
【0054】
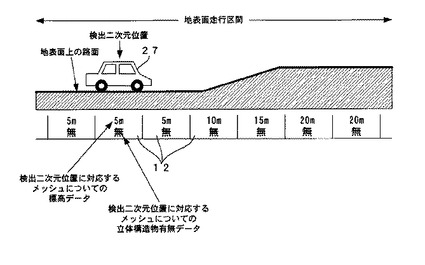
本実施形態においては、図3に示すように、自車両27が地表面走行区間を走行している場合には、走行場所判定部14が、検出二次元位置に対応する標高・立体構造物有無DB11内のメッシュ12についての立体構造物有無データが、立体構造物が存在しないことを示すデータであることに基づいて、自車両27が地表面上を走行していると判定する。
【0055】
このとき、第1標高検出部15は、検出二次元位置に対応するメッシュ12についての標高データを取得することによって、自車両27が走行している地表面上の地点の標高を検出する。なお、図3における自車両27が走行している地表面上の地点の標高は、5mとなっている。
【0056】
このような地表面走行区間において、補正用データ生成部16は、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部9の演算結果についての検出二次元位置の変化にともなう推移とを比較する。
【0057】
ここで、この推移の比較の具体的な例としては、次のような方法を挙げることができる。
【0058】
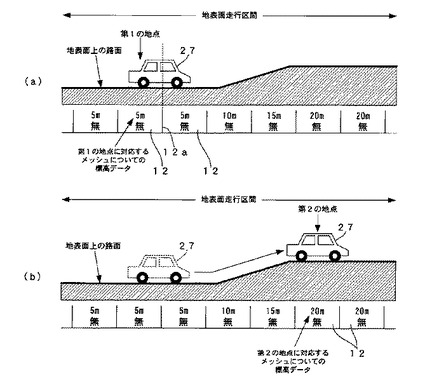
すなわち、補正用データ生成部16は、まず、図4(a)に示すように、自車両27が、1個のメッシュ12と、その直後のメッシュ12との境界12aに対応する地点を通過するタイミングで、前記1個のメッシュ12についての標高データを取得して、この1個のメッシュ12に対応する地点(以下、第1の地点と称する)の標高(図4(a)における5m)を記録する。また、このとき、補正用データ生成部16は、垂直方向移動量演算部9に、垂直移動量すなわち自車両27の加速度の垂直成分の積分値を0クリアさせる。
【0059】
そして、この直後に、補正用データ生成部16は、垂直方向移動量演算部9に、垂直移動量の演算を再開させる。
【0060】
次いで、図4(b)に示すように、補正用データ生成部16は、自車両27が前記1個のメッシュ12の後の他のメッシュ12に対応する地点(以下、第2の地点と称する)に到達した際に、第2の地点の標高を、当該第2の地点に対応するメッシュ12についての標高データ(図4(b)における20m)に基づいて取得する。
【0061】
なお、前記他のメッシュ12は、前記1個のメッシュ12の直後のメッシュ12であってもよいし、図4(b)のように前記1個のメッシュ12に対して数個分のメッシュ12を隔てたメッシュ12であってもよい。
【0062】
そして、補正用データ生成部16は、第2の地点の標高と、第1の地点の標高との差分をとることによって、自車両27の実際の垂直移動量を算出する。
【0063】
また、このとき、補正用データ生成部16は、垂直方向移動量演算部9から、第1の地点から第2の地点までの垂直移動量の演算結果を取得する。
【0064】
そして、補正用データ生成部16は、標高データに基づいて算出された自車両27の実際の垂直移動量と、垂直方向移動量演算部9によって演算された垂直移動量との差分をとる。
【0065】
補正用データ生成部16は、このような動作を地表面走行区間において繰り返すことによって、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部9の演算結果についての検出二次元位置の変化にともなう推移との比較を行う。
【0066】
なお、前記推移の比較は、必ずしも図4に示した垂直移動量のみに基づいて行うものに限る必要はなく、例えば、自車両27の所定の水平移動距離当たりの垂直移動量である傾きを求め、この傾きの検出二次元位置にともなう変化が、標高データに基づいて算出された実際の垂直移動量を用いる場合と、垂直方向移動量演算部9の演算結果を用いる場合とでどのように異なるかに基づいて行うようにしてもよい。
【0067】
このような推移の比較を行った上で、補正用データ生成部16は、比較結果に基づいて、地表面走行区間の直後の立体構造物走行区間における垂直方向移動量演算部9の演算結果を補正するための補正用データを生成する。
【0068】
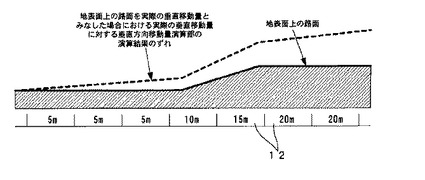
例えば、図5に示すように、前述した推移の比較により、垂直方向移動量演算部9の演算結果が、検出二次元位置の変化すなわち水平移動距離の増加にともなって漸次実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、水平移動距離の増加にともなってより減少する方向に補正する補正用データを生成する。なお、垂直方向移動量演算部9の演算結果の推移は、加速度センサ7の特性を反映している。
【0069】
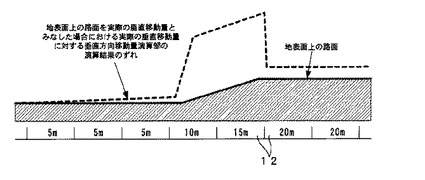
また、図6に示すように、前述した推移の比較において、垂直方向移動量演算部9の演算結果が、路面の傾斜が急激に変化する際に実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、路面の傾斜が急激に変化する際に減少する方向に補正する補正用データを生成する。
【0070】
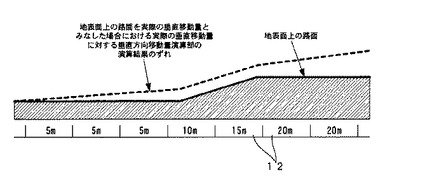
さらに、図7に示すように、前述した推移の比較において、垂直方向移動量演算部9の演算結果が、水平な路面において実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、水平な路面を走行する際に減少する方向に補正する補正用データを生成する。
【0071】
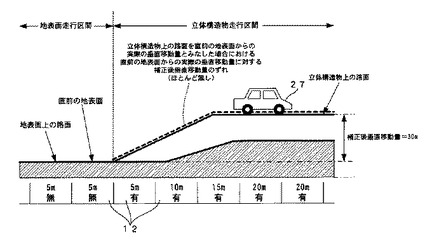
次いで、図8に示すように、自車両27が、地表面走行区間の直後の立体構造物走行区間に移行すると、第2標高検出部18は、垂直方向移動量演算部9が演算した立体構造物走行区間の直前の地表面(地表面走行区間のもの)からの立体構造物走行区間における垂直移動量を、補正用データ生成部16によって生成された補正用データを用いて補正する。
【0072】
次いで、第2標高検出部18は、この垂直移動量の補正によって生成された補正後垂直移動量を、立体構造物走行区間の直前の地表面についての第1標高検出部15によって検出された標高に加算することによって、自車両27が走行している立体構造物上の地点の標高を検出する。
【0073】
ここで、図8に示すように、補正後移動量の推移は、立体構造物走行区間の直前の地表面からの実際の垂直移動量の推移とほぼ一致している。すなわち、第2標高検出部18によって検出される標高は、自車両27が走行している地点の標高を正確に示したものとなっている。
【0074】
なお、図8においては、立体構造物走行区間の直前の地表面の標高が5mであり、補正後垂直移動量が30mであるため、第2標高検出部18によって検出される立体構造物上の地点の標高は、35mとなる。
【0075】
次いで、自車位置判定部19は、二次元位置検出部6の検出結果と第2標高検出部18の検出結果とからなる自車両の三次元位置を取得し、取得された三次元位置に基づいて、地図データ上の三次元の自車位置を判定する。
【0076】
このとき、第2標高検出部18によって自車両27が走行している立体構造物上の地点の標高が高精度に検出されているため、自車位置判定部19は、自車位置を、立体構造物上の道路に確実にマッチングさせることができる。
【0077】
以上述べたように、本実施形態によれば、地表面走行区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出することが可能となる。また、立体構造物走行区間においては、垂直方向移動量演算部9によって演算された立体構造物走行区間の直前の地表面からの垂直移動量を、補正用データを用いて補正し、補正後垂直移動量を当該直前の地表面の標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出することが可能となる。
【0078】
この結果、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる。
【0079】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【図面の簡単な説明】
【0080】
【図1】本発明に係る標高検出装置および自車位置判定装置の実施形態を示すブロック図
【図2】本発明に係る標高検出装置および自車位置判定装置の実施形態において、標高データおよび立体構造物有無データの管理状態を模式的に示す説明図
【図3】本発明に係る標高検出装置および自車位置判定装置の実施形態において、自車両の地表面走行区間の走行状態を示す説明図
【図4】本発明に係る標高検出装置および自車位置判定装置の実施形態において、第1標高検出部によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部の演算結果についての検出二次元位置の変化にともなう推移との比較方法の一例を示す説明図
【図5】本発明に係る標高検出装置および自車位置判定装置の実施形態において、垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図6】本発明に係る標高検出装置および自車位置判定装置の実施形態において、図5とは異なる垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図7】本発明に係る標高検出装置および自車位置判定装置の実施形態において、図5および図6とは異なる垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図8】本発明に係る標高検出装置および自車位置判定装置の実施形態において、補正後垂直移動量の推移を示す説明図
【符号の説明】
【0081】
2 自車位置判定装置
3 標高検出装置
5 GPSレシーバ
6 二次元位置検出部
7 加速度センサ
9 垂直方向移動量演算部
10 記憶装置
11 標高・立体構造物有無DB
12 メッシュ
14 走行場所判定部
15 第1標高検出部
16 補正用データ生成部
18 第2標高検出部
19 自車位置判定部
【技術分野】
【0001】
本発明は、標高検出装置および自車位置判定装置に係り、特に、自車両が走行している地点の標高を検出するのに好適な標高検出装置および自車位置判定装置に関する。
【背景技術】
【0002】
従来から、車載用ナビゲーション装置においては、主としてGPS(Global Positioning System)によって、緯度、経度および標高からなる自車両が走行している地点の三次元位置を測位し、測位結果に基づいて、自車両が地図データ上のどの道路を走行中であるかを判定し、必要があれば自車位置を地図データ上の該当する道路上の位置に補正するマップマッチングを行うようになっていた。
【0003】
ところで、GPSを用いた三次元位置の測位は、垂直(高さ)方向の精度が水平方向の精度よりも低く、10mの単位で誤差が生じる場合があったため、例えば、自車両が二階建て道路における下階の道路を通る場合に、誤って上階の道路にマッチングされてしまうといった不具合があった。
【0004】
そこで、自車両が走行している地点の標高を高精度に検出して自車位置の判定精度を向上させる観点から、これまでにも、例えば、自車両が第1の地点から第2の地点に移動する場合における第2の地点の標高を検出する方法として、第1の地点の標高を基準として、第1の地点から第2の地点までの自車両の垂直方向の移動量を、加速度センサを用いて累積的に検出し、検出結果を第1の地点の標高に加算することによって第2の地点の標高を検出することが行われていた。
【0005】
【特許文献1】特開平11−287665号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前述した加速度センサを用いて第2の地点の標高を検出する方法であっても、基準となる第1の地点の標高自体が、垂直方向の精度が低いGPS等によって検出されたものであったため、第2の地点における標高を高精度に検出することは非常に困難であった。
【0007】
また、加速度センサ自体にも、外乱による影響や、個々の性能のばらつきや誤差などの正確な垂直方向の移動量の検出を妨げる阻害要因が存在していたため、理論通りに自車両の加速度の垂直成分に対する積分を計算したとしても、必ずしも垂直方向の移動量を正確に検出することはできなかった。
【0008】
したがって、自車両が走行している地点の標高を高精度に検出することによって自車位置の判定精度を向上させるといった懸案事項については、未だに有効な解決策が提案されていないのが実情であった。
【0009】
そこで、本発明は、このような点に鑑みなされたものであり、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる標高検出装置および自車位置判定装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
前述した目的を達成するため、本発明に係る標高検出装置は、自車両が走行している地点の標高を検出する標高検出装置であって、前記自車両の二次元位置を検出する二次元位置検出手段と、前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段とを備えたことを特徴としている。
【0011】
そして、このような構成によれば、自車両が地表面上を走行している第1の区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出することが可能となり、自車両が立体構造物上を走行している第2の区間においては、垂直方向移動量検出手段によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出することが可能となる。
【0012】
また、本発明に係る他の標高検出装置は、前記垂直方向移動量検出手段が、加速度センサを有することを特徴としている。
【0013】
そして、このような構成によれば、加速度センサの検出結果である自車両の加速度の垂直成分を二回積分することによって、自車両の垂直方向の移動量を簡便に検出することが可能となる。
【0014】
さらに、本発明に係る他の標高検出装置は、前記二次元位置検出手段が、GPSを有することを特徴としている。
【0015】
そして、このような構成によれば、自車両の二次元位置を水平方向の精度に優れたGPSによって簡便かつ適切に検出することが可能となる。
【0016】
さらにまた、本発明に係る自車位置判定装置は、前述した標高検出装置を有し、前記標高検出装置における前記二次元位置検出手段の検出結果と前記第1または第2の標高検出手段の検出結果とからなる前記自車両の三次元位置を取得し、取得された前記三次元位置に基づいて、地図データ上の自車位置を判定するように形成されていることを特徴としている。
【0017】
そして、このような構成によれば、自車両が地表面上を走行している第1の区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、この検出された標高と自車両の二次元位置とからなる自車両の三次元位置に基づいて、自車両が地表面上を走行していると判定することが可能となる。また、自車両が立体構造物上を走行している第2の区間においては、第2の区間の直前の地表面の標高に、垂直方向移動量検出手段によって検出された当該地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正した上で加算することによって、自車両が走行している立体構造物上の地点の標高を検出し、この検出された標高と自車両の二次元位置とからなる自車両の三次元位置に基づいて、自車両が立体構造物上を走行していると判定することが可能となる。
【発明の効果】
【0018】
本発明に係る標高検出装置によれば、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる。
【0019】
また、本発明に係る他の標高検出装置によれば、加速度センサの検出結果である自車両の加速度の垂直成分を二回積分することによって、自車両の垂直方向の移動量を簡便に検出することができる結果、自車両が走行している地点の標高を簡便に検出することができる。
【0020】
さらに、本発明に係る他の標高検出装置によれば、自車両の二次元位置を水平方向の精度に優れたGPSによって簡便かつ適切に検出することができる結果、自車両が走行している地点の標高を簡便かつ高精度に検出することができる。
【0021】
さらにまた、本発明に係る自車位置判定装置によれば、自車両が走行している地点の標高を高精度に検出することによって自車位置の判定精度を向上させることができ、ひいては、自車両を適切にルート案内することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係る標高検出装置および自車位置判定装置の実施形態について、図1乃至図8を参照して説明する。
【0023】
図1は、本発明に係る標高検出装置および自車位置判定装置が搭載された車載用ナビゲーション装置1を示したものである。
【0024】
本実施形態における車載用ナビゲーション装置1は、自車位置判定装置2と、この自車位置判定装置2に内蔵された標高検出装置3とを有している。
【0025】
標高検出装置3は、GPSレシーバ5を有しており、このGPSレシーバ5は、図示しないGPS衛星から、軌道および時刻に関する情報(以下、GPS情報と称する)を受信するようになっている。
【0026】
GPSレシーバ5には、このGPSレシーバ5とともに二次元位置検出手段を構成する二次元位置検出部6が接続されており、この二次元位置検出部6には、GPSレシーバ5が受信したGPS情報が入力されるようになっている。
【0027】
そして、二次元位置検出部6は、入力されたGPS情報に基づいて、自車両が走行している地点の二次元位置を、経度および緯度によって表される絶対座標として検出するようになっている。なお、二次元位置検出部6は、必要に応じて、ジャイロセンサ等の図示しない自律航法センサの検出結果に基づいて、二次元位置を相対位置として検出するようにしてもよい。
【0028】
標高検出装置3は、加速度センサ7を有しており、この加速度センサ7は、自車両の加速度を検出するようになっている。加速度センサ7は、例えば、圧電素子型の3軸加速度センサであってもよい。
【0029】
加速度センサ7には、この加速度センサ7とともに垂直方向移動量検出手段を構成する垂直方向移動量演算部9が接続されており、この垂直方向移動量演算部9には、加速度センサ7の検出結果が入力されるようになっている。
【0030】
そして、垂直方向移動量演算部9は、入力された加速度センサ7の検出結果から、自車両の加速度における垂直方向成分を取り出し、この垂直方向成分の加速度に対する積分を行うことによって、自車両の垂直方向の移動量(以下、垂直移動量と略称する)を検出するようになっている。
【0031】
さらに、本実施形態において、標高検出装置3は、標高データ管理手段および立体構造物有無データ管理手段として機能する記憶装置10を有しており、この記憶装置10には、地表面の標高を示す標高データおよび自車両が走行可能な立体構造物の有無を示す立体構造物有無データのデータベース(以下、標高・立体構造物有無DB11と称する)が記憶されている。
【0032】
図2に示すように、標高・立体構造物有無DB11には、標高データが、複数個のメッシュ12ごとに管理された状態として格納されている。なお、本実施形態におけるメッシュ12は、地表面を所定の緯度範囲および所定の経度範囲ごとに分割することによって形成されてなる前記所定の緯度範囲および前記所定の経度範囲によって囲まれた矩形領域とされており、このメッシュ12は、標高データおよび後述する立体構造物有無データの管理単位とされている。
【0033】
図2は、1個のメッシュ12に、図2において「5m」、「10m」等の文字で表された1個の標高データが割り当てられた状態として格納されていること、換言すれば、各メッシュ12に割り当てられている標高データが、各メッシュ12のそれぞれに対応する地表面の標高であることを示している。
【0034】
なお、前記所定の緯度範囲および前記所定の経度範囲は、それぞれ、例えば、5〜10mに相当する緯度範囲および経度範囲であってもよい。
【0035】
さらに、標高・立体構造物有無DB11には、立体構造物有無データが、メッシュ12ごとに管理された状態として格納されている。なお、図2は、1つのメッシュ12に、図2において「有」または「無」の文字で表された1つの立体構造物有無データが割り当てられた状態として格納されていること、換言すれば、各メッシュ12に割り当てられている立体構造物有無データが、各メッシュ12に対応する地表面の上方または下方に自車両が走行することが可能な立体構造物が存在することの有無を示す情報であることを示している。自車両が走行可能な立体構造物としては、二階建て道路、橋梁、自走式の立体駐車場および自走式の地下駐車場等が挙げられる。
【0036】
二次元位置検出部6および記憶装置10には、判定手段としての走行場所判定部14が接続されている。この走行場所判定部14は、二次元位置検出部6によって検出された二次元位置(以下、検出二次元位置と称する)および標高・立体構造物有無DB11に格納された検出二次元位置に対応するメッシュ12についての立体構造物有無データを用いることにより、現在車両が地表面上を走行しているかまたは立体構造物上を走行しているかを判定するようになっている。
【0037】
二次元位置判定部6、走行場所判定部14および記憶装置10には、第1の標高検出手段としての第1標高検出部15が接続されている。この第1標高検出部15は、走行場所判定部14によって自車両が地表面上を走行していると判定されている第1の区間(以下、地表面走行区間と称する)においては、標高・立体構造物有無DB11から検出二次元位置に対応するメッシュ12についての標高データを取得することによって、自車両が走行している地表面上の地点の標高を検出するようになっている。
【0038】
二次元位置検出部6、垂直方向移動量演算部9、走行場所判定部14および第1標高検出部15には、補正用データ生成手段としての補正用データ生成部16が接続されている。
【0039】
この補正用データ生成部16は、地表面走行区間において、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量検出手段の検出結果としての垂直方向移動量演算部9の演算結果(垂直移動量)についての検出二次元位置の変化にともなう推移とを比較するようになっている。
【0040】
そして、補正用データ生成部16は、その比較結果に基づいて、地表面走行区間の直後の走行場所判定部14によって自車両が立体構造物上を走行していると判定される第2の区間(以下、立体構造物走行区間と称する)における垂直方向移動量演算部9の演算結果を補正するための補正用データを生成するようになっている。
【0041】
二次元位置検出部6、垂直方向移動量演算部9、走行場所判定部14、第1標高検出部15および補正用データ生成部16には、第2の標高検出手段としての第2標高検出部18が接続されている。
【0042】
この第2標高検出部18は、地表面走行区間の直後の立体構造物走行区間において、自車両が走行している立体構造物上の地点の標高を検出するようになっている。
【0043】
この立体構造物上の地点の標高の検出に際して、第2標高検出部18は、まず、立体構造物走行区間において垂直方向移動量演算部9が演算した立体構造物走行区間の直前の地表面すなわち地表面走行区間における立体構造物走行区間に隣接する地表面からの立体構造物走行区間における垂直移動量を、補正用データ生成部16によって生成された補正用データを用いて補正するようになっている。
【0044】
そして、第2標高検出部18は、補正後の垂直移動量(以下、補正後垂直移動量と称する)を、当該立体構造物走行区間の直前の地表面についての第1標高検出部15によって検出された標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出するようになっている。
【0045】
このような構成を有する標高検出装置3は、さらに、二次元位置検出部6、第1標高検出部15、第2標高検出部18および記憶装置10に接続された自車位置判定部19と、記憶装置10に記憶された地図データベース(以下、地図DB20と称する)とによって、前述した自車位置判定装置2を構成している。
【0046】
自車位置判定部19は、二次元位置検出部6の検出結果と第1標高検出部15または第2標高検出部18の検出結果とからなる自車両の三次元位置を取得し、取得された三次元位置に基づいて、地図データ上の三次元の自車位置を判定するようになっている。この自車位置の判定の際に、自車位置判定部19は、地図DB20に格納された地図データを用いてマップマッチングを行うようになっている。
【0047】
なお、地図DB20内の地図データは、道路の標高を含めた道路の三次元位置データを有するものであってもよい。そのようにすれば、二次元位置検出部6の検出結果と第1標高検出部15または第2標高検出部18の検出結果とからなる自車両の三次元位置と、地図DB20内の道路の三次元位置データとを比較することによって、マップマッチングを更に高精度に行うことが可能となる。
【0048】
したがって、本実施形態によれば、地表面走行区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、この検出された標高と地表面走行区間における検出二次元位置とからなる自車両の三次元位置に基づいて、自車両が地表面上を走行していると判定することができ、地図データにおける地表面上の道路に自車位置をマッチングさせることができる。
【0049】
また、立体構造物走行区間においては、立体構造物走行区間の直前の地表面の標高に、立体構造物走行区間において垂直方向移動量演算部9が演算した当該直前の地表面からの垂直移動量を、補正用データを用いて補正した上で加算することによって、自車両が走行している立体構造物上の地点の標高を検出することができる。
【0050】
そして、この検出された標高と立体構造物走行区間における検出二次元位置とからなる自車両の三次元位置に基づいて、自車両が立体構造物上を走行していると判定することができ、地図データにおける立体構造物上の道路に自車位置をマッチングさせることができる。なお、立体構造物上の道路のデータが地図データにない場合であっても、自車位置が地表面上の道路にミスマッチングしてしまうことは防止することができる。
【0051】
上記構成の他にも、自車位置判定装置2における自車位置判定部19には、自車位置描画部22が接続されており、この自車位置描画部22には、ディスプレイ24が接続されている。
【0052】
自車位置描画部22は、自車位置判定部19の判定結果に基づいて、ルート案内等の際に、ディスプレイ6に描画される自車位置周辺の地図上に、自車位置を示すマークを重ねて描画するようになっている。
【0053】
次に、本実施形態の作用について図3乃至図8を参照して説明する。
【0054】
本実施形態においては、図3に示すように、自車両27が地表面走行区間を走行している場合には、走行場所判定部14が、検出二次元位置に対応する標高・立体構造物有無DB11内のメッシュ12についての立体構造物有無データが、立体構造物が存在しないことを示すデータであることに基づいて、自車両27が地表面上を走行していると判定する。
【0055】
このとき、第1標高検出部15は、検出二次元位置に対応するメッシュ12についての標高データを取得することによって、自車両27が走行している地表面上の地点の標高を検出する。なお、図3における自車両27が走行している地表面上の地点の標高は、5mとなっている。
【0056】
このような地表面走行区間において、補正用データ生成部16は、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部9の演算結果についての検出二次元位置の変化にともなう推移とを比較する。
【0057】
ここで、この推移の比較の具体的な例としては、次のような方法を挙げることができる。
【0058】
すなわち、補正用データ生成部16は、まず、図4(a)に示すように、自車両27が、1個のメッシュ12と、その直後のメッシュ12との境界12aに対応する地点を通過するタイミングで、前記1個のメッシュ12についての標高データを取得して、この1個のメッシュ12に対応する地点(以下、第1の地点と称する)の標高(図4(a)における5m)を記録する。また、このとき、補正用データ生成部16は、垂直方向移動量演算部9に、垂直移動量すなわち自車両27の加速度の垂直成分の積分値を0クリアさせる。
【0059】
そして、この直後に、補正用データ生成部16は、垂直方向移動量演算部9に、垂直移動量の演算を再開させる。
【0060】
次いで、図4(b)に示すように、補正用データ生成部16は、自車両27が前記1個のメッシュ12の後の他のメッシュ12に対応する地点(以下、第2の地点と称する)に到達した際に、第2の地点の標高を、当該第2の地点に対応するメッシュ12についての標高データ(図4(b)における20m)に基づいて取得する。
【0061】
なお、前記他のメッシュ12は、前記1個のメッシュ12の直後のメッシュ12であってもよいし、図4(b)のように前記1個のメッシュ12に対して数個分のメッシュ12を隔てたメッシュ12であってもよい。
【0062】
そして、補正用データ生成部16は、第2の地点の標高と、第1の地点の標高との差分をとることによって、自車両27の実際の垂直移動量を算出する。
【0063】
また、このとき、補正用データ生成部16は、垂直方向移動量演算部9から、第1の地点から第2の地点までの垂直移動量の演算結果を取得する。
【0064】
そして、補正用データ生成部16は、標高データに基づいて算出された自車両27の実際の垂直移動量と、垂直方向移動量演算部9によって演算された垂直移動量との差分をとる。
【0065】
補正用データ生成部16は、このような動作を地表面走行区間において繰り返すことによって、第1標高検出部15によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部9の演算結果についての検出二次元位置の変化にともなう推移との比較を行う。
【0066】
なお、前記推移の比較は、必ずしも図4に示した垂直移動量のみに基づいて行うものに限る必要はなく、例えば、自車両27の所定の水平移動距離当たりの垂直移動量である傾きを求め、この傾きの検出二次元位置にともなう変化が、標高データに基づいて算出された実際の垂直移動量を用いる場合と、垂直方向移動量演算部9の演算結果を用いる場合とでどのように異なるかに基づいて行うようにしてもよい。
【0067】
このような推移の比較を行った上で、補正用データ生成部16は、比較結果に基づいて、地表面走行区間の直後の立体構造物走行区間における垂直方向移動量演算部9の演算結果を補正するための補正用データを生成する。
【0068】
例えば、図5に示すように、前述した推移の比較により、垂直方向移動量演算部9の演算結果が、検出二次元位置の変化すなわち水平移動距離の増加にともなって漸次実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、水平移動距離の増加にともなってより減少する方向に補正する補正用データを生成する。なお、垂直方向移動量演算部9の演算結果の推移は、加速度センサ7の特性を反映している。
【0069】
また、図6に示すように、前述した推移の比較において、垂直方向移動量演算部9の演算結果が、路面の傾斜が急激に変化する際に実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、路面の傾斜が急激に変化する際に減少する方向に補正する補正用データを生成する。
【0070】
さらに、図7に示すように、前述した推移の比較において、垂直方向移動量演算部9の演算結果が、水平な路面において実際の垂直移動量よりも大きくなることが判明した場合には、補正用データ生成部16は、垂直方向移動量演算部9によって演算される垂直移動量の値を、水平な路面を走行する際に減少する方向に補正する補正用データを生成する。
【0071】
次いで、図8に示すように、自車両27が、地表面走行区間の直後の立体構造物走行区間に移行すると、第2標高検出部18は、垂直方向移動量演算部9が演算した立体構造物走行区間の直前の地表面(地表面走行区間のもの)からの立体構造物走行区間における垂直移動量を、補正用データ生成部16によって生成された補正用データを用いて補正する。
【0072】
次いで、第2標高検出部18は、この垂直移動量の補正によって生成された補正後垂直移動量を、立体構造物走行区間の直前の地表面についての第1標高検出部15によって検出された標高に加算することによって、自車両27が走行している立体構造物上の地点の標高を検出する。
【0073】
ここで、図8に示すように、補正後移動量の推移は、立体構造物走行区間の直前の地表面からの実際の垂直移動量の推移とほぼ一致している。すなわち、第2標高検出部18によって検出される標高は、自車両27が走行している地点の標高を正確に示したものとなっている。
【0074】
なお、図8においては、立体構造物走行区間の直前の地表面の標高が5mであり、補正後垂直移動量が30mであるため、第2標高検出部18によって検出される立体構造物上の地点の標高は、35mとなる。
【0075】
次いで、自車位置判定部19は、二次元位置検出部6の検出結果と第2標高検出部18の検出結果とからなる自車両の三次元位置を取得し、取得された三次元位置に基づいて、地図データ上の三次元の自車位置を判定する。
【0076】
このとき、第2標高検出部18によって自車両27が走行している立体構造物上の地点の標高が高精度に検出されているため、自車位置判定部19は、自車位置を、立体構造物上の道路に確実にマッチングさせることができる。
【0077】
以上述べたように、本実施形態によれば、地表面走行区間においては、標高データの取得によって自車両が走行している地表面上の地点の標高を検出することが可能となる。また、立体構造物走行区間においては、垂直方向移動量演算部9によって演算された立体構造物走行区間の直前の地表面からの垂直移動量を、補正用データを用いて補正し、補正後垂直移動量を当該直前の地表面の標高に加算することによって、自車両が走行している立体構造物上の地点の標高を検出することが可能となる。
【0078】
この結果、自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる。
【0079】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【図面の簡単な説明】
【0080】
【図1】本発明に係る標高検出装置および自車位置判定装置の実施形態を示すブロック図
【図2】本発明に係る標高検出装置および自車位置判定装置の実施形態において、標高データおよび立体構造物有無データの管理状態を模式的に示す説明図
【図3】本発明に係る標高検出装置および自車位置判定装置の実施形態において、自車両の地表面走行区間の走行状態を示す説明図
【図4】本発明に係る標高検出装置および自車位置判定装置の実施形態において、第1標高検出部によって検出される標高についての検出二次元位置の変化にともなう推移と、垂直方向移動量演算部の演算結果についての検出二次元位置の変化にともなう推移との比較方法の一例を示す説明図
【図5】本発明に係る標高検出装置および自車位置判定装置の実施形態において、垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図6】本発明に係る標高検出装置および自車位置判定装置の実施形態において、図5とは異なる垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図7】本発明に係る標高検出装置および自車位置判定装置の実施形態において、図5および図6とは異なる垂直方向移動量演算部の演算結果についての推移の一例を示す説明図
【図8】本発明に係る標高検出装置および自車位置判定装置の実施形態において、補正後垂直移動量の推移を示す説明図
【符号の説明】
【0081】
2 自車位置判定装置
3 標高検出装置
5 GPSレシーバ
6 二次元位置検出部
7 加速度センサ
9 垂直方向移動量演算部
10 記憶装置
11 標高・立体構造物有無DB
12 メッシュ
14 走行場所判定部
15 第1標高検出部
16 補正用データ生成部
18 第2標高検出部
19 自車位置判定部
【特許請求の範囲】
【請求項1】
自車両が走行している地点の標高を検出する標高検出装置であって、
前記自車両の二次元位置を検出する二次元位置検出手段と、
前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、
地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、
前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、
前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、
この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、
前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、
前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段と
を備えたことを特徴とする標高検出装置。
【請求項2】
前記垂直方向移動量検出手段が、加速度センサを有することを特徴とする請求項1に記載の標高検出装置。
【請求項3】
前記二次元位置検出手段が、GPSを有することを特徴とする請求項1または請求項2に記載の標高検出装置。
【請求項4】
自車両の二次元位置を検出する二次元位置検出手段と、
前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、
地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、
前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、
前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、
この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、
前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、
前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段と
を備えた標高検出装置を有し、
前記標高検出装置における前記二次元位置検出手段の検出結果と前記第1または第2の標高検出手段の検出結果とからなる前記自車両の三次元位置を取得し、取得された前記三次元位置に基づいて、地図データ上の自車位置を判定するように形成されていること
を特徴とする自車位置判定装置。
【請求項1】
自車両が走行している地点の標高を検出する標高検出装置であって、
前記自車両の二次元位置を検出する二次元位置検出手段と、
前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、
地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、
前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、
前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、
この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、
前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、
前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段と
を備えたことを特徴とする標高検出装置。
【請求項2】
前記垂直方向移動量検出手段が、加速度センサを有することを特徴とする請求項1に記載の標高検出装置。
【請求項3】
前記二次元位置検出手段が、GPSを有することを特徴とする請求項1または請求項2に記載の標高検出装置。
【請求項4】
自車両の二次元位置を検出する二次元位置検出手段と、
前記自車両の垂直方向の移動量を検出する垂直方向移動量検出手段と、
地表面を所定の緯度範囲および所定の経度範囲ごとに分割してなる複数個のメッシュごとに、地表面の標高を示す標高データを管理する標高データ管理手段と、
前記メッシュごとに、前記自車両が走行可能な立体構造物の有無を示す立体構造物有無データを管理する立体構造物有無データ管理手段と、
前記二次元位置検出手段によって検出された前記二次元位置およびこの二次元位置に対応するメッシュについての前記立体構造物有無データを用いて、前記自車両が地表面上を走行しているかまたは前記立体構造物上を走行しているかを判定する判定手段と、
この判定手段によって前記自車両が地表面上を走行していると判定される第1の区間において、前記標高データ管理手段から前記自車両の二次元位置に対応するメッシュについての標高データを取得することにより、前記自車両が走行している地表面上の地点の標高を検出する第1の標高検出手段と、
前記第1の区間において、前記第1の標高検出手段によって検出される標高についての前記二次元位置の変化にともなう推移と、前記垂直方向移動量検出手段の検出結果についての前記二次元位置の変化にともなう推移とを比較し、比較結果に基づいて、前記第1の区間の直後の前記判定手段によって前記自車両が前記立体構造物上を走行していると判定される第2の区間における前記垂直方向移動量検出手段の検出結果を補正するための補正用データを生成する補正用データ生成手段と、
前記第2の区間において、前記垂直方向移動量検出手段によって検出される前記第2の区間の直前の地表面からの前記第2の区間における前記自車両の垂直方向の移動量を、前記補正用データを用いて補正し、補正後の自車両の垂直方向の移動量を、前記第2の区間の直前の地表面についての前記第1の標高検出手段によって検出された標高に加算することにより、前記自車両が走行している立体構造物上の地点の標高を検出する第2の標高検出手段と
を備えた標高検出装置を有し、
前記標高検出装置における前記二次元位置検出手段の検出結果と前記第1または第2の標高検出手段の検出結果とからなる前記自車両の三次元位置を取得し、取得された前記三次元位置に基づいて、地図データ上の自車位置を判定するように形成されていること
を特徴とする自車位置判定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−32598(P2008−32598A)
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願番号】特願2006−207758(P2006−207758)
【出願日】平成18年7月31日(2006.7.31)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願日】平成18年7月31日(2006.7.31)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]