
機器、遠隔操作装置、および遠隔操作システム
【課題】映像伝送の遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることを目的とする。
【解決手段】RTG16aは、ビデオカメラ24aと、ビデオカメラ24aによって取得された映像データをIP伝送に適した形式に変換するビデオエンコーダ27aと、ビデオエンコーダ27aによって変換された映像データを遠隔操作卓31aに送信するハブ20と、ビデオカメラ24aの撮影範囲に設けられ、遠隔操作卓31aからの指令に基づいて点灯/消灯するランプ29とを備え、遠隔操作卓31aは、RTG16aに対して、ランプ29を点灯/消灯させる旨の指令を出力し、該指令を出してから点灯/消灯したランプ29が映像に含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する。
【解決手段】RTG16aは、ビデオカメラ24aと、ビデオカメラ24aによって取得された映像データをIP伝送に適した形式に変換するビデオエンコーダ27aと、ビデオエンコーダ27aによって変換された映像データを遠隔操作卓31aに送信するハブ20と、ビデオカメラ24aの撮影範囲に設けられ、遠隔操作卓31aからの指令に基づいて点灯/消灯するランプ29とを備え、遠隔操作卓31aは、RTG16aに対して、ランプ29を点灯/消灯させる旨の指令を出力し、該指令を出してから点灯/消灯したランプ29が映像に含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、遠隔操作される機器、該機器を遠隔操作する遠隔操作装置、および機器と遠隔操作装置とを備える遠隔操作システムに関する。
【背景技術】
【0002】
例えば、コンテナターミナルは、コンテナ船に対してコンテナを積み込み、または荷揚げを行う岸壁施設を有するとともに、荷揚げしたコンテナを荷主に引き渡すまで貯蔵保管し、または荷主から受け取ったコンテナを船積みするまで貯蔵保管するコンテナヤードを有している。そして、コンテナターミナルにおいてコンテナを移送する際には、コンテナヤードに蔵置されたコンテナをゴムタイヤ式トランスファークレーン(以下「RTG」という。)によってトレーラに移し、トレーラによってコンテナを搬送するようにしている。
【0003】
このようなコンテナターミナルにおいては、RTGは無線遠隔制御によって運行制御されており、運行制御においては、例えば、管理棟に配置された遠隔操作卓からRTGにコマンドなどの指令を送信するとともに、RTGからそのステータスを遠隔操作卓に送って運行制御を行っている(例えば、特許文献1参照)。
すなわち、RTGから遠隔操作卓へは複数のカメラからの映像データやマイク及びスピーカからの音声データとセンター信号などの制御データが送信されるとともに、遠隔操作卓からRTGへは前記各種データに基づいた運転操作信号などの制御データが送信される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−180141号公報
【特許文献2】特開2007−31102号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、RTGと遠隔操作卓との間で送受信される各種データは、特許文献2にも記載されているように、制御データ(RTGから遠隔操作卓へのセンサ信号や遠隔操作卓からRTGへの運転操作信号など)に関してはモデムによる無線データ通信で送受信を行い、映像データ及び音声データに関しては漏洩同軸ケーブルから漏洩された電波を用いて送受信を行っていた。
【0006】
しかしながら、特許文献2においては、映像データに遅延(伝送の遅れ)が生じた場合には、その遅延状況を確認することができないため、操作の安全性が損なわれるという問題があった。特に、遠隔操作場所の範囲を拡大して、遠隔操作システムのより一層の効率アップを図るために、上述した各種データの伝送形式を全てIP(インターネットプロトコル)伝送とし、インターネット上でのデータ送受信を可能とした場合には、映像データの遅延は十分にあり得る。
【0007】
本発明は、このような事情に鑑みてなされたものであって、映像伝送の遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができる機器、遠隔操作装置、および遠隔操作システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、遠隔操作装置によって遠隔操作されるとともに、該遠隔操作装置に映像データを送信する機器であって、映像データを取得する撮影手段と、前記撮影手段によって取得された映像データをデータ送信に適した形式に変換するデータ変換手段と、前記データ変換手段によって変換された映像データを前記遠隔操作装置に送信する送信手段と、前記データ変換手段よりも映像データの上流側に設けられ、前記遠隔操作装置からの指令に基づいて、映像データの遅延時間を前記遠隔操作装置において検出させるための第1情報を映像データに付加する情報付加手段とを具備する機器を提供する。
【0009】
本発明によれば、撮影手段により映像データが取得され、この映像データがデータ変換手段によってデータ送信に適した形式に変換され、送信手段により遠隔操作装置に送信される。この場合において、上記映像データには、データ変換手段よりも映像データの上流側において、遠隔操作装置からの指令に基づいて、遠隔操作装置において映像データの遅延状況を検出するための第1情報が情報付加手段によって付加される。これにより、遠隔操作装置においては、上記第1情報を付加させる指令を送信してから、該第1情報が付加された映像データを受信するまでの時間を検出することにより、映像データの遅延時間を把握することができる。また、第1情報は、データ変換手段よりも映像データの上流側において付加されることから、データ伝送の遅延だけではなく、映像データの変換処理における遅延も考慮した一連の遅延時間についての評価が可能となる。
【0010】
上記機器において、前記情報付加手段は、前記撮影手段によって撮影される範囲内に設置されたランプであり、前記遠隔操作装置からの指令に基づいて点灯及び消灯することとしてもよい。
【0011】
このような構成によれば、例えば、遠隔操作装置からランプを点灯させる指令を受信した場合には、ランプを点灯させ、点灯したランプが映された映像データがデータ変換手段によってデータ送信に適した形式に変換されて、送信手段により遠隔操作装置に送信される。これにより、遠隔操作装置では、ランプ点灯指令を出してから点灯しているランプが映された映像データを受信するまでの時間を検出することにより、遅延時間を検出することが可能となる。このように、上記構成によれば、ランプを点灯/消灯させるといった簡便な手法により、容易に映像データの遅延時間を検出することができる。
【0012】
また、上記機器において、前記情報付加手段は、前記遠隔操作装置からの指令に基づいて、前記撮影手段によって撮影された映像データに所定のデータをインポーズするミキサであってもよい。
【0013】
このような構成によれば、例えば、撮影手段によって取得された映像データはミキサに入力される。このとき、遠隔操作装置から所定のデータをインポーズする旨の指令を受信した場合には、ミキサにおいて、映像データに対して所定のデータがインポーズされる。そして、所定のデータがインポーズされた映像データがデータ変換手段によってデータ送信に適した形式に変換されて、送信手段により遠隔操作装置に送信される。これにより、遠隔操作装置では、所定のデータのインポーズ指令を送信してから所定のデータがインポーズされている映像データを受信するまでの時間を検出することにより、映像データの遅延時間を検出することが可能となる。このように、上記構成によれば、所定のデータをインポーズさせるという簡便な手法により、容易に映像データの遅延時間を検出することができる。
【0014】
本発明は、上記いずれかに記載の機器を遠隔操作する遠隔操作装置であって、前記機器に対して、映像データの遅延時間を検出するための前記第1情報を映像データに付加する旨の指令を出力し、前記指令を出してから該第1情報が含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する遠隔操作装置を提供する。
【0015】
本発明によれば、第1情報を映像データに付加する旨の指令を機器に出力してから該第1情報が付加された映像データを受信するまでの時間を検出することにより、映像データの遅延時間を容易に検出することができる。
【0016】
上記遠隔操作装置は、前記映像データの遅延時間が予め設定されている所定の閾値以上であった場合に、前記機器の運転を停止させることとしてもよい。
【0017】
映像データの遅延時間が所定の閾値以上であった場合には機器の運転を停止させるので、映像データの遅延に起因する操作ミスなどを防止でき、機器の運転の安全性を高めることができる。
【0018】
更に、上記遠隔操作装置は、前記映像データの遅延時間が前記所定の閾値未満になった場合に、運転を停止させていた前記機器の運転を再開することとしてもよい。
【0019】
映像データの遅延時間が所定の閾値未満になった場合には、停止させていた機器の運転を自動的に再開するので、運転の効率アップを図ることができる。
【0020】
本発明は、上記のいずれかに記載の機器と、上記のいずれかに記載の遠隔操作装置とを備える遠隔操作システムを提供する。
【発明の効果】
【0021】
本発明によれば、映像データの遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができるという効果を奏する。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係るコンテナターミナルの概略構成斜視図である。
【図2】本発明の一実施形態に係るRTG遠隔操作システムの概略構成図である。
【図3】本発明の一実施形態に係るRTG遠隔操作映像データの遅延時間検出方法の手順を示す説明図である。
【図4】本発明の一実施形態に係るRTG遠隔操作映像データの一例を示した図である。
【図5】本発明の他の実施形態に係るRTG遠隔操作映像データの遅延時間検出方法の手順を示す説明図である。
【図6】本発明の他の実施形態に係るRTG遠隔操作映像データの一例を示した図である。
【発明を実施するための形態】
【0023】
以下に、本発明の機器、遠隔操作装置、および遠隔操作システムをコンテナターミナルにおけるゴムタイヤ式トランスファークレーン(以下「RTG」という。)の遠隔操作に適用した場合の一実施形態について、図面を参照して説明する。
【0024】
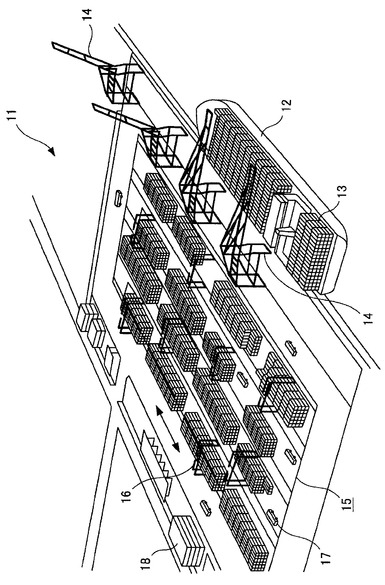
図1は本発明の一実施形態に係るコンテナターミナルの概略構成斜視図である。
図1に示すように、コンテナターミナル11には、コンテナ船12に対してコンテナ13の荷役を行う岸壁クレーン(以下「GC」という。)14が設置されているとともに、コンテナ13を積付け保管する複数のコンテナヤード15が設けられている。各コンテナヤード15には多数のコンテナ13が集積され、コンテナヤード15に集積されたコンテナ13を跨ぐようにして搬送機械としての複数のRTG16が配置されている。そして、各RTG16は図中実線矢印で示す方向に移動可能とされている。
【0025】
一方、コンテナターミナル11には搬送機械としての複数のトレーラ17が配置されている。これらトレーラ17はコンテナヤード15間を走行するとともに、GC14とコンテナヤード15との間を走行する。例えば、RTG16によってコンテナヤード15上のコンテナ13がトレーラ17上に搭載され、トレーラ17によってGC14に運ばれて、GC14によって船積みされる。また、コンテナ船12上のコンテナ13はGC14によってトレーラ17上に搭載され、トレーラ17によってコンテナヤード15に搬送され、RTG16によってコンテナヤード15に積載される。
【0026】
コンテナターミナル11には管理棟18が配置されており、この管理棟18に設置された図示しない遠隔操作卓はRTG16及びトレーラ17と無線回線(例えば、無線LAN)によって接続され、RTG16はそれぞれ遠隔操作卓によって無線遠隔制御されるようになっている。
【0027】
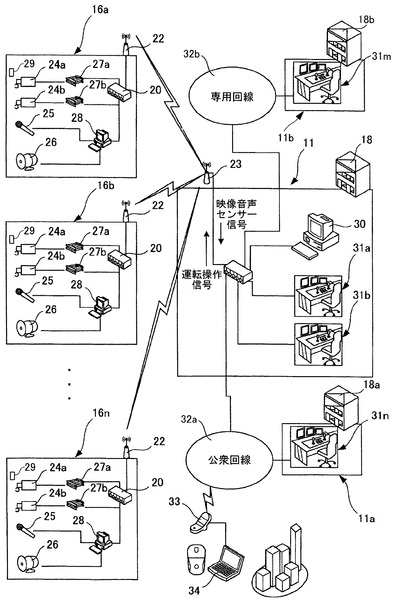
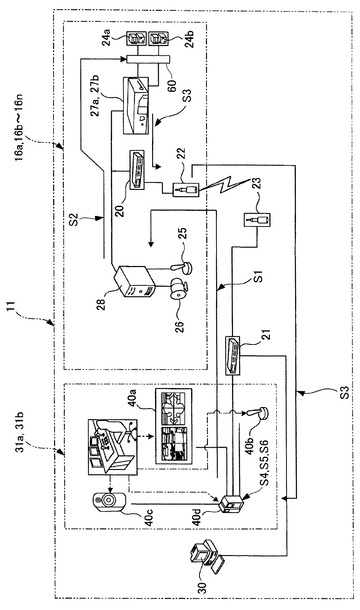
RTG16を例示して図2で説明すると、コンテナターミナルに配置された複数のRTG16a、16b〜16nの各々が搭載するハブ20とコンテナターミナルの管理棟18におけるハブ21とがそれぞれ無線機22、23によって無線LANで接続される。
【0028】
各RTG16a、16b〜16nには、コンテナ13やトレーラ17などの状況を捉える複数台(図2では2台)のビデオカメラ(撮影手段)24a,24bと、少なくとも一つのビデオカメラ24aによって撮影される範囲内に設置されたランプ(情報付加手段)29と、有人トレーラの運転手とやり取りするためのマイク25及びスピーカ26が搭載されている。ビデオカメラ24a,24bによって取得されたアナログ信号の映像データは、ビデオエンコーダ(データ変換手段・送信手段)27a,27bを介して公衆回線用データであるIP(インターネットプロトコル)データに変換されてハブ(送信手段)20に入力されるとともに、マイク25及びスピーカ26の音声データも制御用コンピュータ28を介してIPデータに変換されてハブ20に入力される。
【0029】
一方、各RTG16a、16b〜16nが配置されたコンテナターミナルにおける管理棟18内のハブ21には、遠隔運転管理用コンピュータ(ホストコンピュータ)30と、各RTG16a、16b〜16nを遠隔操作するための複数台(図2では2台)の遠隔操作卓(遠隔操作装置)31a、31bが接続されている。
【0030】
前記遠隔運転管理用コンピュータ30は、RTG16a、16b〜16nからの遠隔操作要求に基づいて各RTG16a、16b〜16nの稼働状況を判断し、この稼働状況に応じて遠隔操作卓31a、31bの送受信可能なRTG16a、16b〜16nを仕分けるようになっている。
【0031】
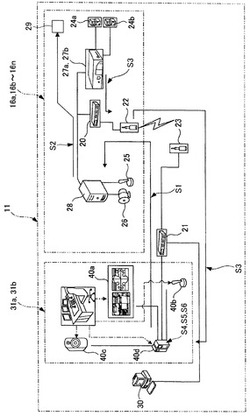
各遠隔操作卓31a、31bは、図3に示すように、ビデオカメラ24a、24bの映像データを表示するモニタ40aと、各RTG16a、16b〜16nのマイク25及びスピーカ26に対応したマイク40b及びスピーカ40cと、各RTG16a、16b〜16nの制御用コンピュータ28に対応した制御用コンピュータ40dと、ジョイスティックやボタンなどの操作入力機器(図示略)とを備え、これらは各種IPデータに対応するとともに各RTG16a、16b〜16nに送信される運転操作信号などの制御データもIPデータに統一されている。
【0032】
また、図2に示すように、各RTG16a、16b〜16nが配置されたコンテナターミナルにおける管理棟18内のハブ21には、距離的に離れた他のコンテナターミナル11aにおける管理棟18a内の遠隔操作卓31nがインターネットの公衆回線32aで接続されるとともに、距離的に離れた他のコンテナターミナル11bにおける管理棟18b内の遠隔操作卓31mが専用回線32bで接続される。
すなわち、遠隔操作卓31n、31mからも遠隔運転管理用コンピュータ30で仕分けられることで、コンテナターミナル11における各RTG16a、16b〜16nの遠隔操作が可能とされている。
【0033】
また、インターネットの公衆回線32aには、光回線や携帯電話のモバイル接続なども含まれる。従って、図示のように、遠隔操作卓31n、31mに限らず、例えば自宅やオフィスなどのコンテナターミナル以外の操作拠点からも携帯電話33及びパーソナルコンピュータ34などで遠隔操作が可能とされている。
そして、本実施形態では、図3に示す手順により、RTG遠隔操作映像データの遅延時間検出が可能とされている。
【0034】
図3において、まず、遠隔操作卓(31a、31b)の制御用コンピュータ40dが、操作先(RTG16a、16b〜16n)の制御用コンピュータ28に対してランプ29の点灯指令を出力する(ステップS1)。ランプの点灯指令を受信した操作先の制御用コンピュータ28は、ランプ29を点灯させる(ステップS2)。これにより、点灯したランプが映った映像データがビデオカメラ24aによって取得される。点灯したランプ29が映った映像データやビデオカメラ24bによって取得された映像データは、ビデオエンコーダ27a、27bにおいてIPデータに変換され、ハブ20を介して操作元の制御用コンピュータ40dに送信される(ステップS3)。
【0035】
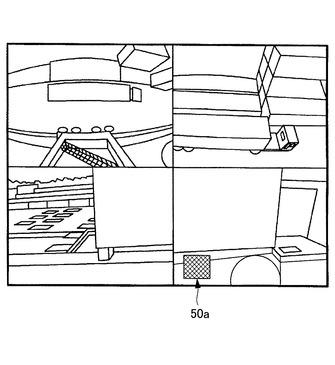
送信元の制御用コンピュータ40dでは、受信したIPデータの映像データをデコードして操作用のモニタ40aに表示させる。ここで、図4に、モニタ40aにおける映像データの表示例を示す。図4では、RTG16a、16b〜16nが4台のビデオカメラを備えている場合の表示例が示されている。このように、表示された映像データの一つには、点灯状態のランプ50aが含まれることとなる。
【0036】
続いて、制御用コンピュータ40dは、映像データを画像処理することにより、映像データに含まれているランプ29の点灯状態を判定し(ステップS4)、ランプの点灯指令を出してから点灯したランプ29の映像が映った映像データを受信するまでの時間を検出して映像の遅延時間を検出する(ステップS5)。
【0037】
続いて、制御用コンピュータ40dは、検出した映像の遅延時間が所定の時間以上であった場合に、全ての操作信号をゼロにして操作先の制御用コンピュータ28に送信し、クレーンを停止させる(ステップS6)。そして、遠隔操作卓31a、31bの制御用コンピュータ40dが、例えば、一定の時間間隔で、ランプ29の点灯指令、消灯指令を繰り返し送信して各RTG16、16b〜16nが備えるランプ29の点灯/消灯を制御し、受信した映像データに映っているランプ29の点灯状態、消灯状態を確認することで、常時、映像データの遅延状況を把握することができる。
【0038】
そして、制御用コンピュータ40dは、映像データの遅延時間が所定の時間以上となることにより、RTGの運転を停止した後においても映像データの遅延時間の検出処理を継続し、映像データの遅延時間が所定の時間未満となったときに、ゼロとしていた操作信号を通常の操作信号に戻し、運転を再開させる。これにより、RTGの運転効率を向上させることができる。
【0039】
上述した映像データの遅延時間検出は、コンテナターミナル11における管理棟18内のハブ21に公衆回線32aで接続された他のコンテナターミナル11aにおける管理棟18a内の遠隔操作卓31nや携帯電話33及びパーソナルコンピュータ34との間でも実施されるとともに、ハブ21に専用回線32bで接続された他のコンテナターミナル11bにおける管理棟18b内の遠隔操作卓31mとの間でも実施される。
【0040】
以上説明したように、本実施形態に係る機器、遠隔操作装置、および遠隔操作システムによれば、各RTG16a、16b〜16nと遠隔操作卓31a,31b〜31nとの間で送受信される映像データ、音声データ、制御データ等の伝送形式をすべてIP伝送に統一したので、インターネット上でのデータ送受信が可能となる。これにより、遠隔操作卓はRTG16a、16b〜16nの設置されている拠点だけでなく、該拠点から距離的に離れた場所からRTG16a、16b〜16nを遠隔操作することができ、遠隔操作場所の範囲を大幅に拡大することが可能となる。この結果、オペレータがRTG16a、16b〜16nの設置されている拠点に赴く必要もなく、更には、不具合発生時に専門家が遠隔からRTG16a、16b〜16nの状態を確認でき、迅速な復旧を実現することが可能となる。
【0041】
更に、本実施形態に係る機器、遠隔操作装置、および遠隔操作システムによれば、各RTG16a、16b〜16nと遠隔操作卓31a,31b〜31nとの間で送受信される映像データの遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができる。特に、本実施形態によれば、映像データをIPデータに変換するビデオエンコーダ27a、27bよりも映像データの上流側において、遠隔操作卓側で遅延時間を検出させるためのランプの点灯・消灯情報を入れ込むこととしたので、データ伝送の遅延だけでなく、ビデオエンコーダ27a、27bにおけるエンコードの処理遅延も含めた一連の遅延時間の評価が可能となる。
【0042】
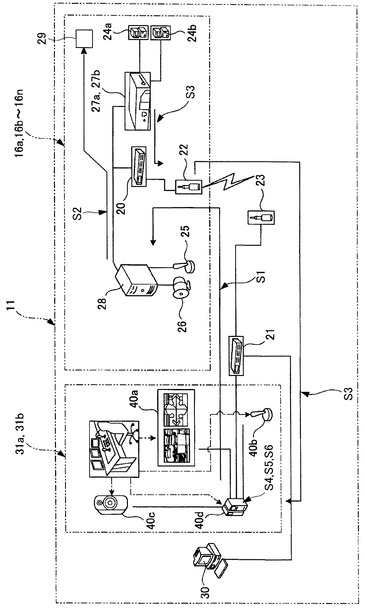
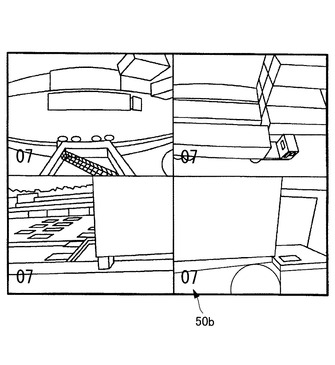
なお、本実施形態では、ランプ29の点灯状態、消灯状態によって映像データの遅延状況を把握することとしたが、他の実施形態として、例えば、図5に示すように、ビデオカメラ24a,24bとビデオエンコーダ27a、27bとの間にミキサ(情報付加手段)60を設置し、ミキサ60において、映像データに所定のデータをインポーズし、該データがインポーズされた映像データをIPデータとして遠隔操作卓側に送信することとしてもよい。
【0043】
この場合、遠隔操作卓31a,31b側では、データのインポーズをRTG側に指示してから所定のデータがインポーズされた映像データを受信するまでの時間を検出することで、映像データの遅延時間を検出することとなる。図6に、本実施形態においてモニタ40aに表示される映像データの一例を示す。なお、図6は、ビデオカメラを4台搭載している場合の表示例とされている。このように、映像データには、ミキサ60によって付加された所定のデータ(ここでは「07」というコード)50bが含まれることとなる。
ミキサ60によってインポーズされる所定のデータは常に同じであってもよいし、その時々で変更されてもよい。
【0044】
なお、上記実施形態では、本発明の機器、遠隔操作装置、及び遠隔操作システムの適用先として、コンテナターミナル11におけるRTGを例示して説明したが、本発明の機器、遠隔操作装置、及び遠隔操作システムは、この例に限られず、遠隔から機器を操作する遠隔操作システムに広く適用される。
【符号の説明】
【0045】
11、11a コンテナターミナル
12 コンテナ船
13 コンテナ
14 岸壁クレーン
15 コンテナヤード
16、16a、16b〜16n ゴムタイヤ式トランスファークレーン
17 トレーラ
18、18a、18b 管理棟
20、21 ハブ
22、23 無線機
24a、24b ビデオカメラ
25 マイク
26 スピーカ
27a、27b ビデオエンコーダ
28 制御用コンピュータ
29 ランプ
30 遠隔運転管理用コンピュータ
31a,31b、31m、31n 遠隔操作卓
32a インターネットの公衆回線
32b 専用回線
33 携帯電話
34 パーソナルコンピュータ
40a モニタ
40b マイク
40c スピーカ
40d 制御用コンピュータ
60 ミキサ
【技術分野】
【0001】
本発明は、例えば、遠隔操作される機器、該機器を遠隔操作する遠隔操作装置、および機器と遠隔操作装置とを備える遠隔操作システムに関する。
【背景技術】
【0002】
例えば、コンテナターミナルは、コンテナ船に対してコンテナを積み込み、または荷揚げを行う岸壁施設を有するとともに、荷揚げしたコンテナを荷主に引き渡すまで貯蔵保管し、または荷主から受け取ったコンテナを船積みするまで貯蔵保管するコンテナヤードを有している。そして、コンテナターミナルにおいてコンテナを移送する際には、コンテナヤードに蔵置されたコンテナをゴムタイヤ式トランスファークレーン(以下「RTG」という。)によってトレーラに移し、トレーラによってコンテナを搬送するようにしている。
【0003】
このようなコンテナターミナルにおいては、RTGは無線遠隔制御によって運行制御されており、運行制御においては、例えば、管理棟に配置された遠隔操作卓からRTGにコマンドなどの指令を送信するとともに、RTGからそのステータスを遠隔操作卓に送って運行制御を行っている(例えば、特許文献1参照)。
すなわち、RTGから遠隔操作卓へは複数のカメラからの映像データやマイク及びスピーカからの音声データとセンター信号などの制御データが送信されるとともに、遠隔操作卓からRTGへは前記各種データに基づいた運転操作信号などの制御データが送信される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−180141号公報
【特許文献2】特開2007−31102号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、RTGと遠隔操作卓との間で送受信される各種データは、特許文献2にも記載されているように、制御データ(RTGから遠隔操作卓へのセンサ信号や遠隔操作卓からRTGへの運転操作信号など)に関してはモデムによる無線データ通信で送受信を行い、映像データ及び音声データに関しては漏洩同軸ケーブルから漏洩された電波を用いて送受信を行っていた。
【0006】
しかしながら、特許文献2においては、映像データに遅延(伝送の遅れ)が生じた場合には、その遅延状況を確認することができないため、操作の安全性が損なわれるという問題があった。特に、遠隔操作場所の範囲を拡大して、遠隔操作システムのより一層の効率アップを図るために、上述した各種データの伝送形式を全てIP(インターネットプロトコル)伝送とし、インターネット上でのデータ送受信を可能とした場合には、映像データの遅延は十分にあり得る。
【0007】
本発明は、このような事情に鑑みてなされたものであって、映像伝送の遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができる機器、遠隔操作装置、および遠隔操作システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、遠隔操作装置によって遠隔操作されるとともに、該遠隔操作装置に映像データを送信する機器であって、映像データを取得する撮影手段と、前記撮影手段によって取得された映像データをデータ送信に適した形式に変換するデータ変換手段と、前記データ変換手段によって変換された映像データを前記遠隔操作装置に送信する送信手段と、前記データ変換手段よりも映像データの上流側に設けられ、前記遠隔操作装置からの指令に基づいて、映像データの遅延時間を前記遠隔操作装置において検出させるための第1情報を映像データに付加する情報付加手段とを具備する機器を提供する。
【0009】
本発明によれば、撮影手段により映像データが取得され、この映像データがデータ変換手段によってデータ送信に適した形式に変換され、送信手段により遠隔操作装置に送信される。この場合において、上記映像データには、データ変換手段よりも映像データの上流側において、遠隔操作装置からの指令に基づいて、遠隔操作装置において映像データの遅延状況を検出するための第1情報が情報付加手段によって付加される。これにより、遠隔操作装置においては、上記第1情報を付加させる指令を送信してから、該第1情報が付加された映像データを受信するまでの時間を検出することにより、映像データの遅延時間を把握することができる。また、第1情報は、データ変換手段よりも映像データの上流側において付加されることから、データ伝送の遅延だけではなく、映像データの変換処理における遅延も考慮した一連の遅延時間についての評価が可能となる。
【0010】
上記機器において、前記情報付加手段は、前記撮影手段によって撮影される範囲内に設置されたランプであり、前記遠隔操作装置からの指令に基づいて点灯及び消灯することとしてもよい。
【0011】
このような構成によれば、例えば、遠隔操作装置からランプを点灯させる指令を受信した場合には、ランプを点灯させ、点灯したランプが映された映像データがデータ変換手段によってデータ送信に適した形式に変換されて、送信手段により遠隔操作装置に送信される。これにより、遠隔操作装置では、ランプ点灯指令を出してから点灯しているランプが映された映像データを受信するまでの時間を検出することにより、遅延時間を検出することが可能となる。このように、上記構成によれば、ランプを点灯/消灯させるといった簡便な手法により、容易に映像データの遅延時間を検出することができる。
【0012】
また、上記機器において、前記情報付加手段は、前記遠隔操作装置からの指令に基づいて、前記撮影手段によって撮影された映像データに所定のデータをインポーズするミキサであってもよい。
【0013】
このような構成によれば、例えば、撮影手段によって取得された映像データはミキサに入力される。このとき、遠隔操作装置から所定のデータをインポーズする旨の指令を受信した場合には、ミキサにおいて、映像データに対して所定のデータがインポーズされる。そして、所定のデータがインポーズされた映像データがデータ変換手段によってデータ送信に適した形式に変換されて、送信手段により遠隔操作装置に送信される。これにより、遠隔操作装置では、所定のデータのインポーズ指令を送信してから所定のデータがインポーズされている映像データを受信するまでの時間を検出することにより、映像データの遅延時間を検出することが可能となる。このように、上記構成によれば、所定のデータをインポーズさせるという簡便な手法により、容易に映像データの遅延時間を検出することができる。
【0014】
本発明は、上記いずれかに記載の機器を遠隔操作する遠隔操作装置であって、前記機器に対して、映像データの遅延時間を検出するための前記第1情報を映像データに付加する旨の指令を出力し、前記指令を出してから該第1情報が含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する遠隔操作装置を提供する。
【0015】
本発明によれば、第1情報を映像データに付加する旨の指令を機器に出力してから該第1情報が付加された映像データを受信するまでの時間を検出することにより、映像データの遅延時間を容易に検出することができる。
【0016】
上記遠隔操作装置は、前記映像データの遅延時間が予め設定されている所定の閾値以上であった場合に、前記機器の運転を停止させることとしてもよい。
【0017】
映像データの遅延時間が所定の閾値以上であった場合には機器の運転を停止させるので、映像データの遅延に起因する操作ミスなどを防止でき、機器の運転の安全性を高めることができる。
【0018】
更に、上記遠隔操作装置は、前記映像データの遅延時間が前記所定の閾値未満になった場合に、運転を停止させていた前記機器の運転を再開することとしてもよい。
【0019】
映像データの遅延時間が所定の閾値未満になった場合には、停止させていた機器の運転を自動的に再開するので、運転の効率アップを図ることができる。
【0020】
本発明は、上記のいずれかに記載の機器と、上記のいずれかに記載の遠隔操作装置とを備える遠隔操作システムを提供する。
【発明の効果】
【0021】
本発明によれば、映像データの遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができるという効果を奏する。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係るコンテナターミナルの概略構成斜視図である。
【図2】本発明の一実施形態に係るRTG遠隔操作システムの概略構成図である。
【図3】本発明の一実施形態に係るRTG遠隔操作映像データの遅延時間検出方法の手順を示す説明図である。
【図4】本発明の一実施形態に係るRTG遠隔操作映像データの一例を示した図である。
【図5】本発明の他の実施形態に係るRTG遠隔操作映像データの遅延時間検出方法の手順を示す説明図である。
【図6】本発明の他の実施形態に係るRTG遠隔操作映像データの一例を示した図である。
【発明を実施するための形態】
【0023】
以下に、本発明の機器、遠隔操作装置、および遠隔操作システムをコンテナターミナルにおけるゴムタイヤ式トランスファークレーン(以下「RTG」という。)の遠隔操作に適用した場合の一実施形態について、図面を参照して説明する。
【0024】
図1は本発明の一実施形態に係るコンテナターミナルの概略構成斜視図である。
図1に示すように、コンテナターミナル11には、コンテナ船12に対してコンテナ13の荷役を行う岸壁クレーン(以下「GC」という。)14が設置されているとともに、コンテナ13を積付け保管する複数のコンテナヤード15が設けられている。各コンテナヤード15には多数のコンテナ13が集積され、コンテナヤード15に集積されたコンテナ13を跨ぐようにして搬送機械としての複数のRTG16が配置されている。そして、各RTG16は図中実線矢印で示す方向に移動可能とされている。
【0025】
一方、コンテナターミナル11には搬送機械としての複数のトレーラ17が配置されている。これらトレーラ17はコンテナヤード15間を走行するとともに、GC14とコンテナヤード15との間を走行する。例えば、RTG16によってコンテナヤード15上のコンテナ13がトレーラ17上に搭載され、トレーラ17によってGC14に運ばれて、GC14によって船積みされる。また、コンテナ船12上のコンテナ13はGC14によってトレーラ17上に搭載され、トレーラ17によってコンテナヤード15に搬送され、RTG16によってコンテナヤード15に積載される。
【0026】
コンテナターミナル11には管理棟18が配置されており、この管理棟18に設置された図示しない遠隔操作卓はRTG16及びトレーラ17と無線回線(例えば、無線LAN)によって接続され、RTG16はそれぞれ遠隔操作卓によって無線遠隔制御されるようになっている。
【0027】
RTG16を例示して図2で説明すると、コンテナターミナルに配置された複数のRTG16a、16b〜16nの各々が搭載するハブ20とコンテナターミナルの管理棟18におけるハブ21とがそれぞれ無線機22、23によって無線LANで接続される。
【0028】
各RTG16a、16b〜16nには、コンテナ13やトレーラ17などの状況を捉える複数台(図2では2台)のビデオカメラ(撮影手段)24a,24bと、少なくとも一つのビデオカメラ24aによって撮影される範囲内に設置されたランプ(情報付加手段)29と、有人トレーラの運転手とやり取りするためのマイク25及びスピーカ26が搭載されている。ビデオカメラ24a,24bによって取得されたアナログ信号の映像データは、ビデオエンコーダ(データ変換手段・送信手段)27a,27bを介して公衆回線用データであるIP(インターネットプロトコル)データに変換されてハブ(送信手段)20に入力されるとともに、マイク25及びスピーカ26の音声データも制御用コンピュータ28を介してIPデータに変換されてハブ20に入力される。
【0029】
一方、各RTG16a、16b〜16nが配置されたコンテナターミナルにおける管理棟18内のハブ21には、遠隔運転管理用コンピュータ(ホストコンピュータ)30と、各RTG16a、16b〜16nを遠隔操作するための複数台(図2では2台)の遠隔操作卓(遠隔操作装置)31a、31bが接続されている。
【0030】
前記遠隔運転管理用コンピュータ30は、RTG16a、16b〜16nからの遠隔操作要求に基づいて各RTG16a、16b〜16nの稼働状況を判断し、この稼働状況に応じて遠隔操作卓31a、31bの送受信可能なRTG16a、16b〜16nを仕分けるようになっている。
【0031】
各遠隔操作卓31a、31bは、図3に示すように、ビデオカメラ24a、24bの映像データを表示するモニタ40aと、各RTG16a、16b〜16nのマイク25及びスピーカ26に対応したマイク40b及びスピーカ40cと、各RTG16a、16b〜16nの制御用コンピュータ28に対応した制御用コンピュータ40dと、ジョイスティックやボタンなどの操作入力機器(図示略)とを備え、これらは各種IPデータに対応するとともに各RTG16a、16b〜16nに送信される運転操作信号などの制御データもIPデータに統一されている。
【0032】
また、図2に示すように、各RTG16a、16b〜16nが配置されたコンテナターミナルにおける管理棟18内のハブ21には、距離的に離れた他のコンテナターミナル11aにおける管理棟18a内の遠隔操作卓31nがインターネットの公衆回線32aで接続されるとともに、距離的に離れた他のコンテナターミナル11bにおける管理棟18b内の遠隔操作卓31mが専用回線32bで接続される。
すなわち、遠隔操作卓31n、31mからも遠隔運転管理用コンピュータ30で仕分けられることで、コンテナターミナル11における各RTG16a、16b〜16nの遠隔操作が可能とされている。
【0033】
また、インターネットの公衆回線32aには、光回線や携帯電話のモバイル接続なども含まれる。従って、図示のように、遠隔操作卓31n、31mに限らず、例えば自宅やオフィスなどのコンテナターミナル以外の操作拠点からも携帯電話33及びパーソナルコンピュータ34などで遠隔操作が可能とされている。
そして、本実施形態では、図3に示す手順により、RTG遠隔操作映像データの遅延時間検出が可能とされている。
【0034】
図3において、まず、遠隔操作卓(31a、31b)の制御用コンピュータ40dが、操作先(RTG16a、16b〜16n)の制御用コンピュータ28に対してランプ29の点灯指令を出力する(ステップS1)。ランプの点灯指令を受信した操作先の制御用コンピュータ28は、ランプ29を点灯させる(ステップS2)。これにより、点灯したランプが映った映像データがビデオカメラ24aによって取得される。点灯したランプ29が映った映像データやビデオカメラ24bによって取得された映像データは、ビデオエンコーダ27a、27bにおいてIPデータに変換され、ハブ20を介して操作元の制御用コンピュータ40dに送信される(ステップS3)。
【0035】
送信元の制御用コンピュータ40dでは、受信したIPデータの映像データをデコードして操作用のモニタ40aに表示させる。ここで、図4に、モニタ40aにおける映像データの表示例を示す。図4では、RTG16a、16b〜16nが4台のビデオカメラを備えている場合の表示例が示されている。このように、表示された映像データの一つには、点灯状態のランプ50aが含まれることとなる。
【0036】
続いて、制御用コンピュータ40dは、映像データを画像処理することにより、映像データに含まれているランプ29の点灯状態を判定し(ステップS4)、ランプの点灯指令を出してから点灯したランプ29の映像が映った映像データを受信するまでの時間を検出して映像の遅延時間を検出する(ステップS5)。
【0037】
続いて、制御用コンピュータ40dは、検出した映像の遅延時間が所定の時間以上であった場合に、全ての操作信号をゼロにして操作先の制御用コンピュータ28に送信し、クレーンを停止させる(ステップS6)。そして、遠隔操作卓31a、31bの制御用コンピュータ40dが、例えば、一定の時間間隔で、ランプ29の点灯指令、消灯指令を繰り返し送信して各RTG16、16b〜16nが備えるランプ29の点灯/消灯を制御し、受信した映像データに映っているランプ29の点灯状態、消灯状態を確認することで、常時、映像データの遅延状況を把握することができる。
【0038】
そして、制御用コンピュータ40dは、映像データの遅延時間が所定の時間以上となることにより、RTGの運転を停止した後においても映像データの遅延時間の検出処理を継続し、映像データの遅延時間が所定の時間未満となったときに、ゼロとしていた操作信号を通常の操作信号に戻し、運転を再開させる。これにより、RTGの運転効率を向上させることができる。
【0039】
上述した映像データの遅延時間検出は、コンテナターミナル11における管理棟18内のハブ21に公衆回線32aで接続された他のコンテナターミナル11aにおける管理棟18a内の遠隔操作卓31nや携帯電話33及びパーソナルコンピュータ34との間でも実施されるとともに、ハブ21に専用回線32bで接続された他のコンテナターミナル11bにおける管理棟18b内の遠隔操作卓31mとの間でも実施される。
【0040】
以上説明したように、本実施形態に係る機器、遠隔操作装置、および遠隔操作システムによれば、各RTG16a、16b〜16nと遠隔操作卓31a,31b〜31nとの間で送受信される映像データ、音声データ、制御データ等の伝送形式をすべてIP伝送に統一したので、インターネット上でのデータ送受信が可能となる。これにより、遠隔操作卓はRTG16a、16b〜16nの設置されている拠点だけでなく、該拠点から距離的に離れた場所からRTG16a、16b〜16nを遠隔操作することができ、遠隔操作場所の範囲を大幅に拡大することが可能となる。この結果、オペレータがRTG16a、16b〜16nの設置されている拠点に赴く必要もなく、更には、不具合発生時に専門家が遠隔からRTG16a、16b〜16nの状態を確認でき、迅速な復旧を実現することが可能となる。
【0041】
更に、本実施形態に係る機器、遠隔操作装置、および遠隔操作システムによれば、各RTG16a、16b〜16nと遠隔操作卓31a,31b〜31nとの間で送受信される映像データの遅延状況を確実に把握でき、遠隔操作システムにおける操作の安全性を高めることができる。特に、本実施形態によれば、映像データをIPデータに変換するビデオエンコーダ27a、27bよりも映像データの上流側において、遠隔操作卓側で遅延時間を検出させるためのランプの点灯・消灯情報を入れ込むこととしたので、データ伝送の遅延だけでなく、ビデオエンコーダ27a、27bにおけるエンコードの処理遅延も含めた一連の遅延時間の評価が可能となる。
【0042】
なお、本実施形態では、ランプ29の点灯状態、消灯状態によって映像データの遅延状況を把握することとしたが、他の実施形態として、例えば、図5に示すように、ビデオカメラ24a,24bとビデオエンコーダ27a、27bとの間にミキサ(情報付加手段)60を設置し、ミキサ60において、映像データに所定のデータをインポーズし、該データがインポーズされた映像データをIPデータとして遠隔操作卓側に送信することとしてもよい。
【0043】
この場合、遠隔操作卓31a,31b側では、データのインポーズをRTG側に指示してから所定のデータがインポーズされた映像データを受信するまでの時間を検出することで、映像データの遅延時間を検出することとなる。図6に、本実施形態においてモニタ40aに表示される映像データの一例を示す。なお、図6は、ビデオカメラを4台搭載している場合の表示例とされている。このように、映像データには、ミキサ60によって付加された所定のデータ(ここでは「07」というコード)50bが含まれることとなる。
ミキサ60によってインポーズされる所定のデータは常に同じであってもよいし、その時々で変更されてもよい。
【0044】
なお、上記実施形態では、本発明の機器、遠隔操作装置、及び遠隔操作システムの適用先として、コンテナターミナル11におけるRTGを例示して説明したが、本発明の機器、遠隔操作装置、及び遠隔操作システムは、この例に限られず、遠隔から機器を操作する遠隔操作システムに広く適用される。
【符号の説明】
【0045】
11、11a コンテナターミナル
12 コンテナ船
13 コンテナ
14 岸壁クレーン
15 コンテナヤード
16、16a、16b〜16n ゴムタイヤ式トランスファークレーン
17 トレーラ
18、18a、18b 管理棟
20、21 ハブ
22、23 無線機
24a、24b ビデオカメラ
25 マイク
26 スピーカ
27a、27b ビデオエンコーダ
28 制御用コンピュータ
29 ランプ
30 遠隔運転管理用コンピュータ
31a,31b、31m、31n 遠隔操作卓
32a インターネットの公衆回線
32b 専用回線
33 携帯電話
34 パーソナルコンピュータ
40a モニタ
40b マイク
40c スピーカ
40d 制御用コンピュータ
60 ミキサ
【特許請求の範囲】
【請求項1】
遠隔操作装置によって遠隔操作されるとともに、該遠隔操作装置に映像データを送信する機器であって、
映像データを取得する撮影手段と、
前記撮影手段によって取得された映像データをデータ送信に適した形式に変換するデータ変換手段と、
前記データ変換手段によって変換された映像データを前記遠隔操作装置に送信する送信手段と、
前記データ変換手段よりも映像データの上流側に設けられ、前記遠隔操作装置からの指令に基づいて、映像データの遅延時間を前記遠隔操作装置において検出させるための第1情報を映像データに付加する情報付加手段と
を具備する機器。
【請求項2】
前記情報付加手段は、前記撮影手段によって撮影される範囲内に設置されたランプであり、前記遠隔操作装置からの指令に基づいて点灯及び消灯する請求項1に記載の機器。
【請求項3】
前記情報付加手段は、前記遠隔操作装置からの指令に基づいて、前記撮影手段によって撮影された映像データに所定のデータをインポーズするミキサである請求項1に記載の機器。
【請求項4】
請求項1から請求項3のいずれかに記載の機器を遠隔操作する遠隔操作装置であって、
前記機器に対して、映像データの遅延時間を検出するための前記第1情報を映像データに付加する旨の指令を出力し、前記指令を出してから該第1情報が含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する遠隔操作装置。
【請求項5】
前記映像データの遅延時間が予め設定されている所定の閾値以上であった場合に、前記機器の運転を停止させる請求項4に記載の遠隔操作装置。
【請求項6】
前記映像データの遅延時間が前記所定の閾値未満になった場合に、運転を停止させていた前記機器の運転を再開する請求項5に記載の遠隔操作装置。
【請求項7】
請求項1から請求項3のいずれかに記載の機器と、
請求項4から請求項6のいずれかに記載の遠隔操作装置と
を備える遠隔操作システム。
【請求項1】
遠隔操作装置によって遠隔操作されるとともに、該遠隔操作装置に映像データを送信する機器であって、
映像データを取得する撮影手段と、
前記撮影手段によって取得された映像データをデータ送信に適した形式に変換するデータ変換手段と、
前記データ変換手段によって変換された映像データを前記遠隔操作装置に送信する送信手段と、
前記データ変換手段よりも映像データの上流側に設けられ、前記遠隔操作装置からの指令に基づいて、映像データの遅延時間を前記遠隔操作装置において検出させるための第1情報を映像データに付加する情報付加手段と
を具備する機器。
【請求項2】
前記情報付加手段は、前記撮影手段によって撮影される範囲内に設置されたランプであり、前記遠隔操作装置からの指令に基づいて点灯及び消灯する請求項1に記載の機器。
【請求項3】
前記情報付加手段は、前記遠隔操作装置からの指令に基づいて、前記撮影手段によって撮影された映像データに所定のデータをインポーズするミキサである請求項1に記載の機器。
【請求項4】
請求項1から請求項3のいずれかに記載の機器を遠隔操作する遠隔操作装置であって、
前記機器に対して、映像データの遅延時間を検出するための前記第1情報を映像データに付加する旨の指令を出力し、前記指令を出してから該第1情報が含まれた映像データを受信するまでの時間を求めることにより、映像データの遅延時間を検出する遠隔操作装置。
【請求項5】
前記映像データの遅延時間が予め設定されている所定の閾値以上であった場合に、前記機器の運転を停止させる請求項4に記載の遠隔操作装置。
【請求項6】
前記映像データの遅延時間が前記所定の閾値未満になった場合に、運転を停止させていた前記機器の運転を再開する請求項5に記載の遠隔操作装置。
【請求項7】
請求項1から請求項3のいずれかに記載の機器と、
請求項4から請求項6のいずれかに記載の遠隔操作装置と
を備える遠隔操作システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−142789(P2012−142789A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−294243(P2010−294243)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]