
機器制御装置
【課題】単にON/OFFするのみならず、そのほかの制御操作を含めて、制御対象機器に対する全ての制御操作を、非接触で行うことが可能な機器制御装置を提供する。
【解決手段】発光器12と受光器13,14とを備えると共に、受光器13,14に人の手のひら9が接近しないときは発光器12から発光された光が受光器13,14に受光されず、受光器13,14に人の手のひら9が接近したときは発光器12から発光された光が接近した手のひら9により反射されて受光器13又は14に受光されるように発光器12と受光器13,14とを配置して機器制御装置1を構成する。この機器制御装置1により、受光器13又は14に対して行われる手のひら9の接近動作、又は、受光器13及び14に対して順に行われる手のひら9の接近動作により、受光器13,14に生じる受光の有無の時間的変化のパターンに従って、制御対象機器2の制御を行う。
【解決手段】発光器12と受光器13,14とを備えると共に、受光器13,14に人の手のひら9が接近しないときは発光器12から発光された光が受光器13,14に受光されず、受光器13,14に人の手のひら9が接近したときは発光器12から発光された光が接近した手のひら9により反射されて受光器13又は14に受光されるように発光器12と受光器13,14とを配置して機器制御装置1を構成する。この機器制御装置1により、受光器13又は14に対して行われる手のひら9の接近動作、又は、受光器13及び14に対して順に行われる手のひら9の接近動作により、受光器13,14に生じる受光の有無の時間的変化のパターンに従って、制御対象機器2の制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、単又は複数の発光器と、並べて配置された複数の受光器とを備え、該受光器に対して人の手のひらを接近させることにより機器の制御を行う機器制御装置に関する。
【背景技術】
【0002】
現代生活において、電気製品は、必要不可欠な存在であり、電気製品を抜きにしては、現代生活を語ることはできず、照明装置もこのような電気製品に含まれる。この照明装置のON/OFFや調光等の制御は、通常、部屋の壁等に設けられたシーソースイッチやノブ状の回転スイッチ等をON/OFFする等により行われる。
【0003】
このようなシーソースイッチや回転スイッチ等の操作を行うには、これらのスイッチ等に直接手を触れる必要があり、手が汚れていると、これらのスイッチを汚してしまうという問題があった。又、手がぬれていると、場合によっては、感電のおそれもあった。
【0004】
そこで、スイッチに直接手を触れることなく操作が可能な非接触スイッチに関する提案が、各種なされている(例えば、特許文献1の第6図参照)。特許文献1の第6図には、赤外線発光ダイオードから発光された赤外線を、手のひらで反射させることで、この反射された赤外線がフォトトランジスタで受光されることにより、スイッチに直接手を触れて行う操作無しで、蛍光灯の電源が投入できる照明装置が記載されている。
【特許文献1】特開平3−277313号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の照明装置では、スイッチに直接手を触れて行う操作無しでできること、即ち、非接触操作で行えることは、蛍光灯の電源のONとOFFのみである。
【0006】
ところが、最近では、照明装置として、単に点灯、消灯するだけではなく、明るさの調節が可能な調光機能を備えた照明装置が、多く出回っている。これらの照明装置では、部屋の壁等に設けられたノブ状の回転スイッチ等を手で回転させることにより、照明装置の点灯、消灯、及び調光を行ったり、シーソースイッチと回転スイッチを併用して、シーソースイッチで点灯、消灯を行い、回転スイッチで調光を行ったりしている。
【0007】
従って、単に点灯、消灯のみならず、調光等の操作も行う場合においては、スイッチに直接手を触れる必要があることから、スイッチに直接手を触れなければならないことにより生じる上述したような問題点は、何ら解消されていない。そのため、単に点灯、消灯のみならず、調光等の操作も、スイッチに直接手を触れることなく非接触で行える照明装置のスイッチ等が要望されていた。
【0008】
そこで、この発明は、このような状況に対処するためになされたものであって、単にON/OFFするのみならず、そのほかの制御操作を含めて、全ての制御操作を非接触で行うことが可能な、照明装置等の機器の制御を行う機器制御装置を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明の機器制御装置は、単又は複数の発光器と、並べて配置された複数の受光器とを備えた機器制御装置である。これらの発光器と受光器は、該受光器に人の手のひらが接近しないときは、発光器から発光された光が受光器に受光されず、受光器に人の手のひらが接近したときは、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光されるような手のひらの接近による動作が可能なように、配置されている。このような手のひらの接近による動作を、ここでは、手のひら接近動作と称する。
【0010】
上記の本発明の機器制御装置では、特定の受光器のみに対して行われる手のひら接近動作、又は、複数の受光器に対して時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴としている。
【0011】
上記の本発明の機器制御装置によれば、複数の受光器に生じる受光の有無の時間的変化のパターンは、例えば、受光器が2個の場合、後述するように、少なくとも4種類の時間的変化のパターンを形成することができる。この時間的変化のパターンを、機器の制御に用いることにより、例えば、機器が照明装置の場合、電源のON/OFFのほか、調光UP/調光DOWNの制御等を行うことができる。従って、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0012】
上記の本発明の機器制御装置では、手のひら接近動作は、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光される仕組を利用している。しかし、逆に、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されないようにしてもよい。
【0013】
即ち、本発明の他の機器制御装置として、上記の本発明の機器制御装置と同様、単又は複数の発光器と、並べて配置された複数の受光器とを備える。そして、これらの発光器と受光器は、該受光器に人の手のひらが接近しないときは、発光器から発光された光が受光器に受光され、受光器に人の手のひらが接近したときは、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されないような手のひらの接近による動作が可能なように、配置されている。このような手のひらの接近による動作を、ここでは、上記と同様、手のひら接近動作と称する。
【0014】
この本発明の他の機器制御装置においても、上記の本発明の機器制御装置と同様、特定の受光器のみに対して行われる手のひら接近動作、又は、複数の受光器に対して時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴としている。
【0015】
この本発明の他の機器制御装置によれば、上記の本発明の機器制御装置と同様にして、複数の受光器に生じる受光の有無の時間的変化のパターンを、機器の制御に用いることにより、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0016】
上記の各機器制御装置を、具体的に次のように構成するようにしてもよい。即ち、上記の各機器制御装置において、これらの機器制御装置が備える受光器を2個とする。そして、一方の受光器又は他方の受光器のみに対して行われる手のひら接近動作、若しくは、一方の受光器から他方の受光器に対して、又は、他方の受光器から一方の受光器に対して、時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、機器に対する制御を行うようにするのである。
【0017】
この機器制御装置では、例えば、手のひら接近動作として、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光される仕組を利用する場合は、複数の受光器に生じる受光の有無の時間的変化のパターンとして、少なくとも、次のような4個のパターンを形成することができる。
【0018】
即ち、第1パターンとして、一方の受光器に対して手のひら接近動作が行われ一方の受光器が受光するが、他方の受光器に対しては、手のひら接近動作が行われず他方の受光器は受光しないパターンとする。
【0019】
第2パターンとして、他方の受光器に対して手のひら接近動作が行われ他方の受光器が受光するが、一方の受光器に対しては、手のひら接近動作が行われず一方の受光器は受光しないパターンとする。
【0020】
第3パターンとして、一方の受光器に対してまず手のひら接近動作が行われ、一方の受光器が受光し、時間差を置いて、次に、他方の受光器に対して次に手のひら接近動作が行われ、他方の受光器が受光するパターンとする。
【0021】
そして、第4パターンとして、他方の受光器に対してまず手のひら接近動作が行われ、他方の受光器が受光し、時間差を置いて、次に、一方の受光器に対して次に手のひら接近動作が行われ、一方の受光器が受光するパターンとするのである。
【0022】
上記と同様にして、手のひら接近動作として、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されない仕組を用いても、少なくとも4個のパターンを形成することができる。
【0023】
上記の時間的変化のパターンを、機器の制御に用いることにより、上述したように、例えば、機器が照明装置の場合、電源のON/OFFのほか、調光UP/調光DOWNの制御を行うことができる。従って、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0024】
又、上記の機器制御装置において、発光器から発光されて受光器に受光される光として、赤外線を用いるのが好適である。即ち、上記の機器制御装置で使用する発光器として赤外線発光器を用いると共に、受光器として赤外線受光器を用いるようにするのである。
【0025】
このようにすることにより、可視光線等の外乱光に対して、ノイズ耐性に優れた機器制御装置を構成することができる。
【0026】
又、上記の機器制御装置において、上述した例に示したように、制御される対象の機器を、照明装置とすることができる。
【発明の効果】
【0027】
本発明によれば、機器制御装置が備える複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を、制御対象の機器に対して行うことができる。従って、単に制御対象の機器の電源のON/OFFをするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0028】
具体的には、例えば、機器制御装置が備える受光器を2個とし、この機器制御装置で使用する発光器として赤外線発光器、受光器として赤外線受光器を用いると共に、制御対象の機器を照明装置とすると、電源のON/OFFのほか、調光UP/調光DOWNの制御等を行うことができる。
【発明を実施するための最良の形態】
【0029】
次に、本発明の実施の形態における機器制御装置について、図面を参照しながら説明する。本実施の形態における機器制御装置は、人の手のひらを機器制御装置にかざすことによって、機器制御装置の制御対象である機器の制御を非接触で行う装置である。
【0030】
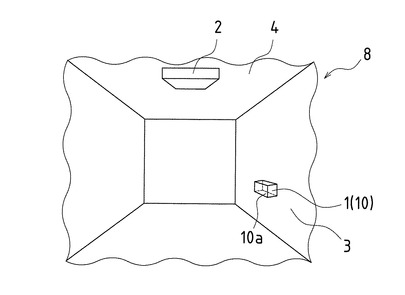
図1は、本実施の形態における機器制御装置1、及び、この機器制御装置1の制御対象である照明装置2が用いられている状態を示した説明図である。図1において、照明装置2は、部屋8の天井4に取付られており、この照明装置2を制御する機器制御装置1は、部屋8の壁3に取付られている。
【0031】
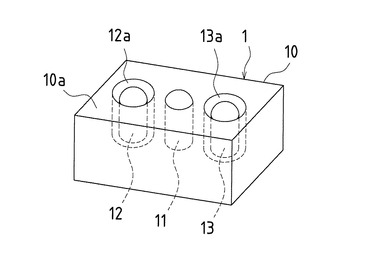
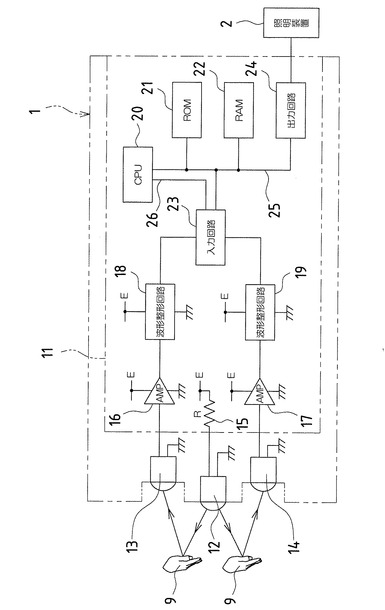
図2は、上記の機器制御装置1の外観図、図3は、正面図、そして、図4は、機器制御装置1の構成を示したブロック図である。図2〜図4において、本実施の形態における機器制御装置1は、機器制御装置筐体10の底面10aに取付られている赤外線発光器12、赤外線A受光器13、赤外線B受光器14、及び、機器制御装置筐体10の内部に内蔵されている制御部11(図2及び図3には図示されていない)で構成されている。
【0032】
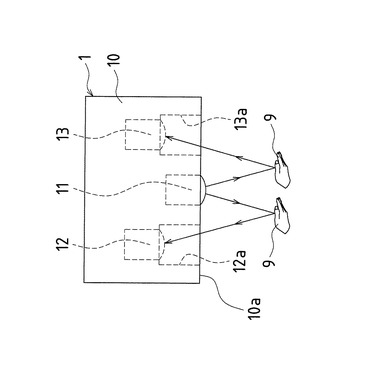
この機器制御装置1は、機器制御装置筐体10の底面10aを下に向けて、部屋8の壁3に取付られており、この取付状態で、機器制御装置1に向かって左から右にかけて、順に、赤外線A受光器13、赤外線発光器12、赤外線B受光器14が一列に並んで配置されている。図2では、機器制御装置1は底面を上に向けて表示されており、図3では、機器制御装置1は底面を下に向けて表示されている。この機器制御装置1に対して、人の手のひら9は、機器制御装置筐体10の底面10aの下方にかざされる。図3及び図4において、9は、機器制御装置1にかざされている人の手のひらを表している。
【0033】
又、赤外線発光器12は、機器制御装置筐体10の底面10aに直接取付られているが、赤外線A受光器13及び赤外線B受光器14は、図2及び図3に示すように機器制御装置筐体10の底面10aに設けられた凹部である赤外線A受光器取付凹部13a及び赤外線B受光器取付凹部14aにそれぞれ取付られている。これは、赤外線発光器12が発光する光が、直接、赤外線A受光器13及び赤外線B受光器14へ入射しないようにするためである。
【0034】
即ち、上記の機器制御装置1では、機器制御装置1に人の手のひら9がかざされないとき、即ち、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近していないときは、赤外線発光器12から発光された光は赤外線A受光器13又は赤外線B受光器14に受光されないように、赤外線発光器12と赤外線A受光器13及び赤外線B受光器14とが配置されている。
【0035】
そして、機器制御装置1に人の手のひら9がかざされて、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近したときには、赤外線発光器12から発光された光が該接近した手のひら9により反射されて、手のひら9が接近した赤外線A受光器13又は赤外線B受光器14のいずれかに受光されるように、赤外線発光器12と赤外線A受光器13及び赤外線B受光器14とが配置されている。
【0036】
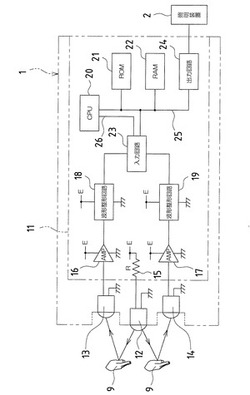
次に、機器制御装置1の構成について説明する。図4において、上述したように、機器制御装置1は、赤外線発光器12、赤外線A受光器13、赤外線B受光器14、及び、制御部11で構成されている。制御部11は、抵抗15、増幅回路16,17、波形整形回路18,19、マイクロプロセッサ20、ROM21、RAM22、入力回路23、及び、出力回路24で構成されている。図4において、Eは、電源を示している。又、図4では、マイクロプロセッサ20、ROM21、RAM22、入力回路23、及び、出力回路24における電源の表示は、省略されている。
【0037】
抵抗15は、発光ダイオードで構成される赤外線発光器12に接続されており、赤外線発光器12に対する赤外線発光用の電流供給に用いられる。増幅回路16,17は、それぞれ赤外線フォトトランジスタで構成される赤外線A受光器13、及び、赤外線B受光器14に接続されており、赤外線A受光器13、赤外線B受光器14の出力を増幅する。波形整形回路18,19は、それぞれ増幅回路16、及び、増幅回路17に接続され、これらの出力の波形整形を行う。波形整形回路18,19の出力は、入力回路23へ入力される。
【0038】
入力回路23は、制御ライン25を介してCPU20に接続されている。このCPU20へは、制御ライン25を介して、入力回路23のほか、ROM21、RAM22、及び、出力回路24が接続されている。又、入力回路23は、割込制御ライン26を介してCPU20に接続されている。一般的には、CPU20、ROM21、RAM22、入力回路23、及び、出力回路24は、1つの半導体チップで構成されている。
【0039】
CPU20は、マイクロプロセッサで構成されている。ROM21には、機器制御装置1の内部制御や、機器制御装置1の制御対象である照明装置2の制御に必要な、OSや各種ソフトウエアが格納されている。CPU20は、このROM21に搭載されたソフトウエアにより、各種の処理を行う。又、RAM22は、CPU20が行う処理に用いられる。
【0040】
入力回路23は、この入力回路23に入力される信号に対して、ハードウエアによる割込機能と、センス機能とを備えている。ハードウエアによる割込機能は、赤外線A受光器13、又は、赤外線B受光器14のいずれかが受光すると、割込を発生させると共に、割込制御ライン26を介してCPU20に割込発生を通知する機能である。
【0041】
このハードウエアによる割込に対しては、入力回路23は、割込の許可化/不許可を指定する割込マスク機能を備えており、割込マスクがON状態では、ハードウエアによる割込は許可されず、割込マスクがOFF状態では、ハードウエアによる割込が許可される仕組である。この割込マスクのON/OFFは、CPU20の指示に基づいて行われる。
【0042】
通常、機器制御装置1が動作を開始すると、割込マスクをOFF状態とする。割込が発生すると、割込マスクをON状態としてこの割込に対する処理を行い、この割込処理が終了した後に、再び割込マスクをOFF状態とする。
【0043】
センス機能は、赤外線A受光器13、或いは、赤外線B受光器14が、それぞれ、受光状態であるのか受光していない状態であるのかを検出する機能である。尚、本明細書では、赤外線A受光器13、或いは、赤外線B受光器14が受光していない状態を、遮光状態と称する場合もある。
【0044】
赤外線A受光器13、或いは、赤外線B受光器14が、それぞれ、受光状態であるのか遮光状態であるのかの上記の検出は、CPU20の指示に基づいて行われる。又、後述するように、赤外線A受光器13、或いは、赤外線B受光器14における受光の有無の状態は、通常、時間的に間隔を置いて変化するので、上記の検出は、上記の割込が発生後、時間的に間隔を置いて、2度行われる。
【0045】
出力回路24は、機器制御装置1の制御対象である照明装置2と接続されており、CPU20からの指示により、照明装置2を制御するのに必要な信号を照明装置2に対して出力する。
【0046】
次に、機器制御装置1の動作について説明する。機器制御装置1には、上述したように、1個の赤外線発光器12と、2個の赤外線受光器である赤外線A受光器13と赤外線B受光器14とが備えられている。そこで、照明装置2に対して、制御が必要でないときは、人の手のひら9を機器制御装置1にかざさないので、上述したように、赤外線発光器12が発光する赤外線は、これらの赤外線A受光器13、或いは、赤外線B受光器14に入射することはなく、従って、赤外線A受光器13、或いは、赤外線B受光器14が受光することはない。
【0047】
次に、部屋8にいる人が部屋8の照明装置2を制御しようとするときには、次の操作を行う。即ち、機器制御装置1の機器制御装置筐体10の底面10aの下方に、手のひら9をかざすことにより、機器制御装置1の機器制御装置筐体10の底面10aに、左から右にかけて順に一列に並んで配置されている赤外線A受光器13、赤外線発光器12、赤外線B受光器14の内の、赤外線A受光器13と、赤外線B受光器14に対して、次の操作1〜操作4のいずれかを行う。
【0048】
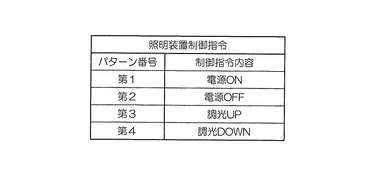
この操作1〜操作4は、次のような場合に行う。操作1は、照明装置2の電源をONするときに行う。操作2は、照明装置2の電源をOFFするときに行う。操作3は、照明装置2の調光UPをするときに行う。そして、操作4は、照明装置2の調光DOWNをするときに行う。
【0049】
これらの操作1〜操作4の具体的な操作方法は、次の通りである。操作1は、機器制御装置筐体10の底面10aの左側下方に手のひら9をかざす。即ち、赤外線A受光器13のみに手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13にのみ受光され、赤外線B受光器14には受光されないようにする。
【0050】
操作2は、機器制御装置筐体10の底面10aの右側下方に手のひら9をかざす。即ち、赤外線B受光器14のみに手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14のみに受光され、赤外線A受光器13には受光されないようにする。
【0051】
操作3は、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの左側下方から右側下方に移動する。即ち、最初に、赤外線A受光器13に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13に受光された後、次に、赤外線B受光器14に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14に受光されるようにする。
【0052】
そして、操作4は、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの右側下方から左側下方に移動する。即ち、最初に、赤外線B受光器14に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14に受光された後、次に、赤外線A受光器13に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13に受光されるようにする。
【0053】
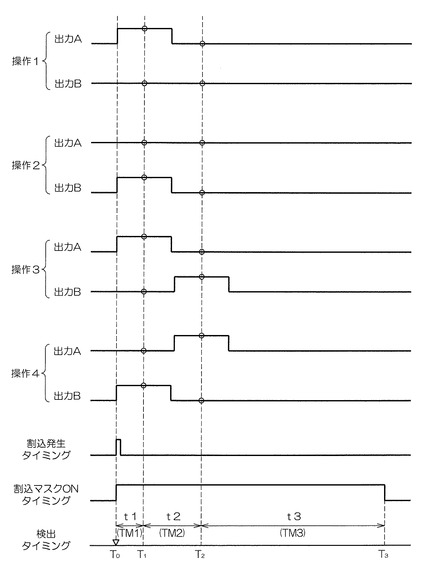
図5は、上記の操作1〜操作4が行われた場合の、赤外線A受光器13、及び、赤外線B受光器14の出力が、波形整形回路18、又は、波形整形回路19で波形整形されて出力された状態を示したタイムチャートである。ここで、赤外線A受光器13の出力の波形整形回路18による波形整形出力を、出力Aと称する。そして、赤外線A受光器13が受光状態における出力Aを、出力レベル「1」と称し、出力A=1と表す。又、赤外線A受光器13が遮光状態における出力Aを、出力レベル「0」と称し、出力A=0と表す。
【0054】
同様にして、赤外線B受光器14の出力の波形整形回路19による波形整形出力を、出力Bと称する。そして、赤外線B受光器14が受光状態における出力Bを、出力レベル「1」と称し、出力B=1、と表す。又、赤外線B受光器14が遮光状態における出力Bを、出力レベル「0」と称し、出力B=0と表す。
【0055】
上述したように、入力回路23は、入力回路23に入力される信号に対して、ハードウエアによる割込機能と、センス機能とを備えている。この内、ハードウエアによる割込機能では、出力A=1、又は、出力B=1の場合に割込が発生する。又、センス機能では、CPU20が入力回路23にアクセスすることにより、出力A、及び、出力Bが、それぞれ、出力レベル「1」であるのか、出力レベル「0」であるのかを検出する。この検出を、出力Aをセンスする、或いは、出力Bをセンスすると称する。
【0056】
この出力A、及び、出力Bは、図5に示すように、時間的に間隔を置いて変化するので、上記の出力A、及び、出力Bのセンスは、上記の割込が発生後、時間的に間隔を置いて2度行われ、先に行われるセンスの対象となる出力を、先出力、後に行われるセンスの対象となる出力を、後出力と称する。尚、図5において、タイムチャートのHighレベルが、上記の出力レベル「1」を表し、Lowレベルが、上記の出力レベル「0」を表す。
【0057】
又、図5では、先出力の出力レベルと後出力の出力レベルとが共に「1」となる操作3、及び、操作4のケースでは、先出力の出力レベルが「1」から「0」になった後、後出力の出力レベルが「0」から「1」になった場合を示している。しかし、先出力の出力レベルが「1」から「0」になる前に後出力の出力レベルが「0」から「1」になる場合もあり得る。
【0058】
この場合に、先出力に対するセンスの時点(図5のT1)、及び、後出力に対するセンスの時点(図5のT2)において、出力A、又は、出力Bのいずれかのみが出力レベル「1」であれば、問題は生じない。これらの先出力、及び、後出力に対するセンスのタイミングは、後述するように、これらの点を考慮して設定される。
【0059】
機器制御装置1は、上記の操作1〜操作4に伴って、照明装置2に対する制御を行うために、ROM21やRAM22に、次のようなデータや記録エリアを備えている。即ち、機器制御装置1は、ROM21に、図6に示す判定基準パターンと図7に示す照明装置制御指令をデータとして備えている。又、RAM22には、図8に示すセンス結果記録エリアを備えている。又、機器制御装置1は、ソフトウエアで実現されるタイマであるタイマTM1、タイマTM2、及び、タイマTM3を備えている。
【0060】
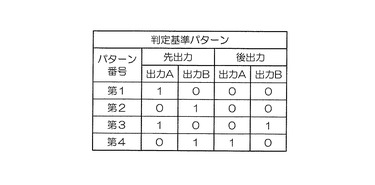
図6に示す判定基準パターンは、パターン番号欄、先出力欄、及び、後出力欄で構成され、先出力欄、及び、後出力欄は、それぞれ、出力A欄と出力B欄とで構成されている。パターン番号欄には、第1パターン〜第4パターンが用意されている。この第1パターン〜第4パターンは、上記の操作1〜操作4に対応しており、これらの各パターンに対して、それぞれ、先出力欄及び後出力欄の各出力A欄には、上記の出力Aの出力レベルに対応して、「1」又は「0」が設定されている。同様に、先出力欄及び後出力欄の各出力B欄には、上記の出力Bの出力レベルに対応して、「1」又は「0」が設定されている。
【0061】
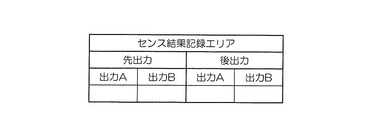
図7に示す照明装置制御指令には、照明装置2に対する制御指令内容として、上記の第1パターン〜第4パターンに対応する制御指令内容が設定されている。又、図8に示すセンス結果記録エリアは、先出力欄と後出力欄とで構成され、先出力欄、及び、後出力欄は、それぞれ、出力A欄と出力B欄とで構成されている。これらの先出力欄、及び、後出力欄の出力A欄には、出力Aに対するセンス結果に従って、「1」又は「0」が記録され、出力B欄には、同じく、出力Bに対するセンス結果に従って、「1」又は「0」が記録される。
【0062】
タイマTM1、及び、タイマTM2は、CPU20が、出力A及び出力Bに対して、時間差を置いてセンスを行うための時点を設定するのに用いられる。又、タイマTM3は、機器制御装置1の誤動作を防止するために、割込マスクをON状態とする期間を十分確保するのに用いられる。これらの各タイマの動作と先出力、及び、後出力に対するセンスタイミングは、図5に示す通りである。
【0063】
即ち、T0で出力A=1、又は、出力B=1となると、割込が発生する。すると、割込みマスクがON状態となり、同時に、タイムアップ時間がt1であるタイマTM1がスタートする。T1でタイマTM1がタイムアップすると、先出力に対するセンスが行われると同時に、タイムアップ時間がt2であるタイマTM2がスタートする。T2でタイマTM2がタイムアップすると、後出力に対するセンスが行われると同時に、タイムアップ時間がt3であるタイマTM3がスタートする。T3でタイマTM3がタイムアップすると、割込みマスクがOFF状態となる。
【0064】
上記のタイマTM1で設定される時間t1、及び、タイマTM2で設定される時間t2は、例えば、上記の操作3、或いは、操作4において、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの左側下方から右側下方に移動する時間、或いは、底面10aの右側下方から左側下方に移動する時間を考慮して、設定する必要がある。即ち、これらの操作が最も自然に行われる場合を想定すると共に、想定されたケースの範囲内におけるこれらの操作により、先出力及び後出力に対するセンスが正確に行われるように設定する必要がある。タイマTM3で設定される時間t3については、後述する。
【0065】
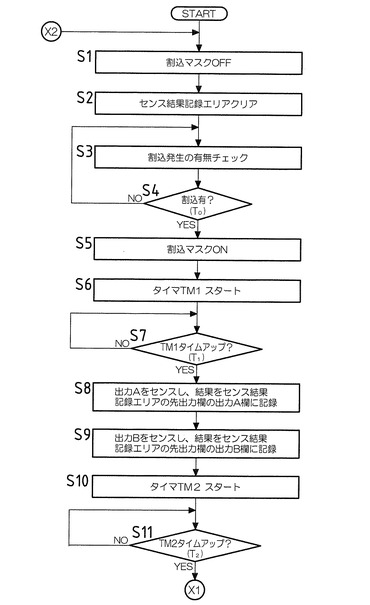
次に、機器制御装置1の具体的な動作について説明する。図9及び図10は、機器制御装置1の具体的な動作を示したフローチャートである。図9及び図10において、まず、CPU20は、割込みマスクをOFF状態とすると共に(S1)、センス結果記録エリアをクリアする(S2)。
【0066】
次に、出力A=1、又は、出力B=1となることによる割込発生の有無をチェックし(S3)、割込が生じると(図5のT0)(S4)、割込みマスクをON状態とすると共に(S5)、タイマTM1をスタートさせる(S6)。
【0067】
タイマTM1がタイムアップすると(図5のT1)(S7)、出力Aをセンスして、センス結果を、センス結果記録エリアの先出力欄の出力A欄に記録すると共に(S8)、出力Bをセンスして、センス結果を、センス結果記録エリアの先出力欄の出力B欄に記録する(S9)。そして、タイマTM2をスタートさせる(S10)。
【0068】
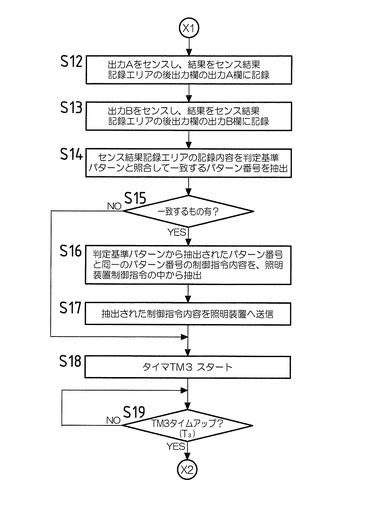
タイマTM2がタイムアップすると(図5のT2)(S11)、出力Aをセンスして、センス結果を、センス結果記録エリアの後出力欄の出力A欄に記録すると共に(S12)、出力Bをセンスして、センス結果を、センス結果記録エリアの後出力欄の出力B欄に記録する(S13)。
【0069】
次に、センス結果記録エリアの記録内容を、ROM21に備えられている判定基準パターンと照合して、一致するパターン番号を抽出する(S14)。センス結果記録エリアの記録内容と一致するパターン番号が判定基準パターンに存在する場合は(S15)、判定基準パターンから抽出されたパターン番号と同一のパターン番号の制御指令内容を、照明装置制御指令の中から抽出すると共に(S16)、抽出された制御指令内容を、照明装置2へ送信する(S17)。これにより、照明装置2が、制御される。
【0070】
そして、タイマTM3をスタートさせ(S18)、タイマTM3がタイムアップすると(S19)、最初のステップに戻って(S1)、上記の処理を繰返す。即ち、タイマTM3は、上述したように、割込マスクをON状態とする期間を十分確保するために使用される。
【0071】
これは、機器制御装置1に対する手のひら9をかざす最初に行われた操作の後に、続いて行われる次の操作である手のひら9をかざす操作に対して、最初に行われた手のひら9をかざす操作による影響が及ばないようにするためである。即ち、割込マスクをON状態とする期間を十分確保することによって、続いて行われた次の手のひら9をかざす操作が、最初に行われた手のひら9をかざす操作の直後に行われた場合には、この続いて行われた次の操作に起因する割り込みを禁止することによって、この続いて行われた次の操作を無視するようにしているのである。このような仕組をとることにより、機器制御装置1における手のひら9をかざす操作による誤動作を防止している。
【0072】
S14における、センス結果記録エリアの記録内容をROM21に備えられている判定基準パターンと照合して、一致するパターン番号を抽出するプロセスにおいて、センス結果記録エリアの記録内容と一致するパターン番号が判定基準パターンに存在しない場合は(S15)、S16、及び、S17を行わずに、S18へ進む。即ち、この場合は、機器制御装置1に手のひら9がかざされてなされた操作が、上述の操作1〜操作4のいずれにも該当しない場合であるので、照明装置2に対しては、何らの制御指令も行われないことになるのである。
【0073】
このように、照明装置2に対しては、何らの制御指令も行われない場合としては、図8のセンス結果記録エリアの記録内容が、例えば、先出力欄の出力A欄もB欄も共に1であるような場合が考えられる。この場合は、機器制御装置1に手のひら9がかざされた際に、赤外線発光器12の発光する光が、赤外線A受光器13に受光されると同時に、赤外線B受光器14にも受光された場合であり、一種の誤操作と考えられる。
【0074】
このように、上述したようなセンス結果記録エリアの記録内容を判定基準パターンと照合する方法を採用することにより、判定基準パターンに設定されないパターンを、誤操作によるパターンと捉えることによって、機器制御装置1に対する誤操作を排除することができる。
【0075】
上記の機器制御装置1によれば、機器制御装置1が備える赤外線A受光器13及び赤外線B受光器14に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を、制御対象の機器である照明装置2に対して行うことができる。従って、単に制御対象の機器である照明装置2の電源のON/OFFをするのみならず、そのほかの調光UPや調光DOWN制御操作を含めて、照明装置2に対する全ての制御操作を、人の手のひら9により非接触で行うことができる。
【0076】
上記の機器制御装置1では、機器制御装置筐体10は、赤外線発光器12、赤外線A受光器13、及び、赤外線B受光器14を備えた機器制御装置筐体10の底面10aを下に向けて、即ち、床に向けて、部屋8の壁3に取付られているが、赤外線発光器12、赤外線A受光器13、及び、赤外線B受光器14を備えた機器制御装置筐体10の底面10aを、床に対して垂直になるように、横に向けて取付るようにしてもよい。この場合は、手のひら9は、機器制御装置1に対して、例えば、上から下へ、或いは、下から上へ移動させてかざすことになる。
【0077】
又、上記の機器制御装置1では、赤外線を発光する赤外線発光器12と、赤外線を受光する赤外線A受光器13、及び、赤外線B受光器14とを用いている。このように、発光及び受光される光として、赤外線を用いているので、可視光線等の外乱光に対して、ノイズ耐性に優れた機器制御装置1を構成することができる。しかし、上記のような機器制御装置を構成するのに際しては、発光や受光は、赤外線には限られず、可視光線等を用いるようにしてもよい。
【0078】
又、上記の機器制御装置1では、1個の赤外線発光器12と、赤外線受光器として、赤外線A受光器13、及び、赤外線B受光器14の2個の赤外線受光器を用いている。しかし、これには限られず、赤外線発光器として、赤外線A受光器13、及び、赤外線B受光器14のそれぞれに、専用の赤外線発光器を2個用いるようにしてもよい。この場合は、赤外線発光器と赤外線受光器とが一体で構成されている光学センサ等を2個用いると、性能やコストの点で好適である。
【0079】
又、上記の機器制御装置1では、機器制御装置1に対する手のひら9による非接触の操作としては、上述した操作1〜操作4の4種類の操作を用いているが、これ以外の手のひら9による非接触の操作を加えるようにすることもできる。例えば、手のひら9を、赤外線A受光器13から赤外線B受光器14に向かって移動させた後、さらに、赤外線A受光器13へ戻るように、赤外線B受光器14から赤外線A受光器13に移動させることで一つの操作を構成する等の、往復移動や繰り返し移動を伴う操作を導入する等である。
【0080】
又、上記の機器制御装置1では、赤外線受光器として、赤外線A受光器13、及び、赤外線B受光器14の2個の赤外線受光器を用いている。しかし、これには限られず、赤外線受光器として、3個以上の赤外線受光器を用いても、上記の本実施の形態における機器制御装置1と同様の仕組で、機器制御装置を構成することができる。
【0081】
即ち、この場合は、機器制御装置に組込まれる赤外線受光器の個数を3個以上とする。そして、上記の本実施の形態における機器制御装置1において、例えば、判定基準パターン、及び、センス結果記録エリアにおける、先出力欄及び後出力欄に代えて、赤外線受光器の個数に相当する複数の出力欄を設けると共に、先出力欄及び後出力欄に代わるこれらの各出力欄に、赤外線受光器の個数に相当する個別の出力欄を設ける。そして、機器制御装置のCPUが、これら全ての赤外線受光器の出力をセンスするようにすることにより、実現することができる。
【0082】
又、上記の機器制御装置1では、機器制御装置1に人の手のひら9がかざされないとき、即ち、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近していないときは、赤外線発光器12から発光された光は赤外線A受光器13又は赤外線B受光器14に受光されない。即ち、赤外線A受光器13又は赤外線B受光器14は、遮光されている。
【0083】
そして、機器制御装置1に人の手のひら9がかざされて、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近したときには、赤外線発光器12から発光された光が該接近した手のひら9により反射されて、手のひら9が接近した赤外線A受光器13又は赤外線B受光器14のいずれかに受光される。
【0084】
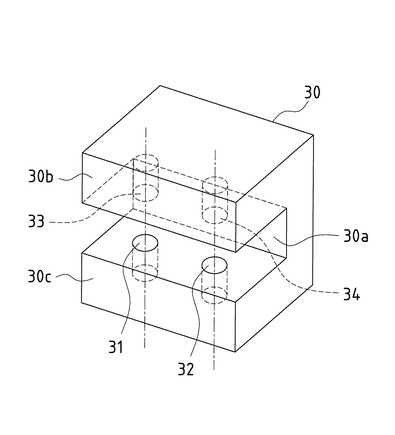
即ち、上記の機器制御装置1では、赤外線が人の手のひら9で反射されることを利用した方式を採用している。しかし、このような方式には限られず、人の手のひら9で赤外線を遮光する方式を用いて、機器制御装置を構成することもできる。図11は、このような方式を用いた機器制御装置30の外観図である。図11では、機器制御装置30は、上面を上に向けて表示されている。機器制御装置30はこの状態で部屋の壁に取付られる。
【0085】
図11において、機器制御装置30には、水平方向に切込部30aが形成されており、この切込部30aの上側に上部筐体部30bが形成され、切込部30aの下側に下部筐体部30cが形成されている。下部筐体部30cの上面には、上方に向けて、赤外線A発光器31及び赤外線B発光器32の2個の赤外線発光器が備えられている。又、下部筐体部30cの下面には、下方に向けて、赤外線A発光器31と対面するように赤外線A受光器33が備えられ、この赤外線A発光器31に並べて、赤外線B発光器32と対面するように赤外線B受光器34が備えられている。この機器制御装置30に対しては、人の手のひらは、機器制御装置30に形成されている水平な切込部30a内に挿入することにより、かざされる。
【0086】
上記の機器制御装置30では、機器制御装置30に人の手のひらがかざされないとき、即ち、赤外線A受光器33又は赤外線B受光器34に人の手のひらが接近していないときは、赤外線A発光器31から発光された光は赤外線A受光器33で受光され、赤外線B発光器32から発光された光は赤外線B受光器34で受光される。
【0087】
そして、機器制御装置30に人の手のひらがかざされて、赤外線A受光器13に人の手のひらが接近したときは、赤外線A発光器31から発光された光は、人の手のひらで遮光されて赤外線A受光器33では受光されない。又、赤外線B受光器34に人の手のひらが接近したときは、赤外線B発光器32から発光された光は、人の手のひらで遮光されて赤外線B受光器34では受光されない。
【0088】
又、上記の機器制御装置30の構成としては、上述した本実施の形態における機器制御装置1と同様に構成する。即ち、赤外線A発光器31、及び、赤外線B発光器32に電源Eを供給すると共に、赤外線A受光器33の出力を増幅回路16に接続し、赤外線B受光器34の出力を増幅回路17に接続する。又、入力回路23における割り込みの発生は、赤外線A受光器33、又は、赤外線B受光器34のいずれかが遮光されると、発生されるようにすると共に、上述した本実施の形態における機器制御装置1の制御の仕組において、受光と遮光とを全て入れ替えることにより、上述した本実施の形態における機器制御装置1の機能と同様の機能を実現することができる。
【0089】
又、上記の機器制御装置30においても、上述した本実施の形態における機器制御装置1と同様、機器制御装置30の底面を、床に対して垂直になるように、横に向けて取付るようにしてもよい。この場合は、手のひらは、機器制御装置30に対して、例えば、上から下へ、或いは、下から上へ、切込部30a内を移動させてかざすことになる。
【0090】
上述した実施の形態では、機器制御装置の制御の対象となる機器として照明装置を用いて説明しているが、機器制御装置の制御の対象となる機器としては、これには限られず、電気信号による制御が可能な装置であれば、いかなる装置も機器制御装置の制御の対象とすることができる。
【図面の簡単な説明】
【0091】
【図1】本実施の形態における機器制御装置及びこの機器制御装置の制御対象である照明装置が用いられている状態を示した説明図である。
【図2】本実施の形態における機器制御装置の外観図である。
【図3】本実施の形態における機器制御装置の正面図である。
【図4】本実施の形態における機器制御装置の構成を示したブロック図である。
【図5】本実施の形態における機器制御装置の操作1〜操作4に関する出力A及び出力Bのタイムチャートである。
【図6】本実施の形態における機器制御装置の判定基準パターンを示したテーブルである。
【図7】本実施の形態における機器制御装置の照明装置制御指令を示したテーブルである。
【図8】本実施の形態における機器制御装置のセンス結果記録エリアを示したテーブルである。
【図9】本実施の形態における機器制御装置の動作を示したフローチャート(その1)である。
【図10】本実施の形態における機器制御装置の動作を示したフローチャート(その2)である。
【図11】他の実施の形態における機器制御装置の外観図である。
【符号の説明】
【0092】
1 機器制御装置
2 照明装置
3 壁
4 天井
8 部屋
9 人の手のひら
10 機器制御装置筐体
10a 機器制御装置筐体底面
11 制御部
12 赤外線発光器
13 赤外線A受光器
13a 赤外線A受光器取付凹部
14 赤外線B受光器
14a 赤外線B受光器取付凹部
15 抵抗
16 増幅回路
17 増幅回路
18 波形整形回路
19 波形整形回路
20 CPU
21 ROM
22 RAM
23 入力回路
24 出力回路
25 制御ライン
26 割込制御ライン
30 機器制御装置
30a 切込部
30b 上部筐体部
30c 下部筐体部
31 赤外線A発光器
32 赤外線B発光器
33 赤外線A受光器
34 赤外線B受光器
【技術分野】
【0001】
本発明は、単又は複数の発光器と、並べて配置された複数の受光器とを備え、該受光器に対して人の手のひらを接近させることにより機器の制御を行う機器制御装置に関する。
【背景技術】
【0002】
現代生活において、電気製品は、必要不可欠な存在であり、電気製品を抜きにしては、現代生活を語ることはできず、照明装置もこのような電気製品に含まれる。この照明装置のON/OFFや調光等の制御は、通常、部屋の壁等に設けられたシーソースイッチやノブ状の回転スイッチ等をON/OFFする等により行われる。
【0003】
このようなシーソースイッチや回転スイッチ等の操作を行うには、これらのスイッチ等に直接手を触れる必要があり、手が汚れていると、これらのスイッチを汚してしまうという問題があった。又、手がぬれていると、場合によっては、感電のおそれもあった。
【0004】
そこで、スイッチに直接手を触れることなく操作が可能な非接触スイッチに関する提案が、各種なされている(例えば、特許文献1の第6図参照)。特許文献1の第6図には、赤外線発光ダイオードから発光された赤外線を、手のひらで反射させることで、この反射された赤外線がフォトトランジスタで受光されることにより、スイッチに直接手を触れて行う操作無しで、蛍光灯の電源が投入できる照明装置が記載されている。
【特許文献1】特開平3−277313号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の照明装置では、スイッチに直接手を触れて行う操作無しでできること、即ち、非接触操作で行えることは、蛍光灯の電源のONとOFFのみである。
【0006】
ところが、最近では、照明装置として、単に点灯、消灯するだけではなく、明るさの調節が可能な調光機能を備えた照明装置が、多く出回っている。これらの照明装置では、部屋の壁等に設けられたノブ状の回転スイッチ等を手で回転させることにより、照明装置の点灯、消灯、及び調光を行ったり、シーソースイッチと回転スイッチを併用して、シーソースイッチで点灯、消灯を行い、回転スイッチで調光を行ったりしている。
【0007】
従って、単に点灯、消灯のみならず、調光等の操作も行う場合においては、スイッチに直接手を触れる必要があることから、スイッチに直接手を触れなければならないことにより生じる上述したような問題点は、何ら解消されていない。そのため、単に点灯、消灯のみならず、調光等の操作も、スイッチに直接手を触れることなく非接触で行える照明装置のスイッチ等が要望されていた。
【0008】
そこで、この発明は、このような状況に対処するためになされたものであって、単にON/OFFするのみならず、そのほかの制御操作を含めて、全ての制御操作を非接触で行うことが可能な、照明装置等の機器の制御を行う機器制御装置を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明の機器制御装置は、単又は複数の発光器と、並べて配置された複数の受光器とを備えた機器制御装置である。これらの発光器と受光器は、該受光器に人の手のひらが接近しないときは、発光器から発光された光が受光器に受光されず、受光器に人の手のひらが接近したときは、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光されるような手のひらの接近による動作が可能なように、配置されている。このような手のひらの接近による動作を、ここでは、手のひら接近動作と称する。
【0010】
上記の本発明の機器制御装置では、特定の受光器のみに対して行われる手のひら接近動作、又は、複数の受光器に対して時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴としている。
【0011】
上記の本発明の機器制御装置によれば、複数の受光器に生じる受光の有無の時間的変化のパターンは、例えば、受光器が2個の場合、後述するように、少なくとも4種類の時間的変化のパターンを形成することができる。この時間的変化のパターンを、機器の制御に用いることにより、例えば、機器が照明装置の場合、電源のON/OFFのほか、調光UP/調光DOWNの制御等を行うことができる。従って、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0012】
上記の本発明の機器制御装置では、手のひら接近動作は、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光される仕組を利用している。しかし、逆に、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されないようにしてもよい。
【0013】
即ち、本発明の他の機器制御装置として、上記の本発明の機器制御装置と同様、単又は複数の発光器と、並べて配置された複数の受光器とを備える。そして、これらの発光器と受光器は、該受光器に人の手のひらが接近しないときは、発光器から発光された光が受光器に受光され、受光器に人の手のひらが接近したときは、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されないような手のひらの接近による動作が可能なように、配置されている。このような手のひらの接近による動作を、ここでは、上記と同様、手のひら接近動作と称する。
【0014】
この本発明の他の機器制御装置においても、上記の本発明の機器制御装置と同様、特定の受光器のみに対して行われる手のひら接近動作、又は、複数の受光器に対して時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴としている。
【0015】
この本発明の他の機器制御装置によれば、上記の本発明の機器制御装置と同様にして、複数の受光器に生じる受光の有無の時間的変化のパターンを、機器の制御に用いることにより、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0016】
上記の各機器制御装置を、具体的に次のように構成するようにしてもよい。即ち、上記の各機器制御装置において、これらの機器制御装置が備える受光器を2個とする。そして、一方の受光器又は他方の受光器のみに対して行われる手のひら接近動作、若しくは、一方の受光器から他方の受光器に対して、又は、他方の受光器から一方の受光器に対して、時間差を置いて順に行われる手のひら接近動作により、複数の受光器に生じる受光の有無の時間的変化のパターンに従って、機器に対する制御を行うようにするのである。
【0017】
この機器制御装置では、例えば、手のひら接近動作として、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより反射されて受光器に受光される仕組を利用する場合は、複数の受光器に生じる受光の有無の時間的変化のパターンとして、少なくとも、次のような4個のパターンを形成することができる。
【0018】
即ち、第1パターンとして、一方の受光器に対して手のひら接近動作が行われ一方の受光器が受光するが、他方の受光器に対しては、手のひら接近動作が行われず他方の受光器は受光しないパターンとする。
【0019】
第2パターンとして、他方の受光器に対して手のひら接近動作が行われ他方の受光器が受光するが、一方の受光器に対しては、手のひら接近動作が行われず一方の受光器は受光しないパターンとする。
【0020】
第3パターンとして、一方の受光器に対してまず手のひら接近動作が行われ、一方の受光器が受光し、時間差を置いて、次に、他方の受光器に対して次に手のひら接近動作が行われ、他方の受光器が受光するパターンとする。
【0021】
そして、第4パターンとして、他方の受光器に対してまず手のひら接近動作が行われ、他方の受光器が受光し、時間差を置いて、次に、一方の受光器に対して次に手のひら接近動作が行われ、一方の受光器が受光するパターンとするのである。
【0022】
上記と同様にして、手のひら接近動作として、受光器に人の手のひらが接近したときに、発光器から発光された光が該接近した手のひらにより遮光されて受光器に受光されない仕組を用いても、少なくとも4個のパターンを形成することができる。
【0023】
上記の時間的変化のパターンを、機器の制御に用いることにより、上述したように、例えば、機器が照明装置の場合、電源のON/OFFのほか、調光UP/調光DOWNの制御を行うことができる。従って、単にON/OFFするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0024】
又、上記の機器制御装置において、発光器から発光されて受光器に受光される光として、赤外線を用いるのが好適である。即ち、上記の機器制御装置で使用する発光器として赤外線発光器を用いると共に、受光器として赤外線受光器を用いるようにするのである。
【0025】
このようにすることにより、可視光線等の外乱光に対して、ノイズ耐性に優れた機器制御装置を構成することができる。
【0026】
又、上記の機器制御装置において、上述した例に示したように、制御される対象の機器を、照明装置とすることができる。
【発明の効果】
【0027】
本発明によれば、機器制御装置が備える複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を、制御対象の機器に対して行うことができる。従って、単に制御対象の機器の電源のON/OFFをするのみならず、そのほかの制御操作を含めて、照明装置等の機器に対する全ての制御操作を、人の手のひらによる操作により、非接触で行うことができる。
【0028】
具体的には、例えば、機器制御装置が備える受光器を2個とし、この機器制御装置で使用する発光器として赤外線発光器、受光器として赤外線受光器を用いると共に、制御対象の機器を照明装置とすると、電源のON/OFFのほか、調光UP/調光DOWNの制御等を行うことができる。
【発明を実施するための最良の形態】
【0029】
次に、本発明の実施の形態における機器制御装置について、図面を参照しながら説明する。本実施の形態における機器制御装置は、人の手のひらを機器制御装置にかざすことによって、機器制御装置の制御対象である機器の制御を非接触で行う装置である。
【0030】
図1は、本実施の形態における機器制御装置1、及び、この機器制御装置1の制御対象である照明装置2が用いられている状態を示した説明図である。図1において、照明装置2は、部屋8の天井4に取付られており、この照明装置2を制御する機器制御装置1は、部屋8の壁3に取付られている。
【0031】
図2は、上記の機器制御装置1の外観図、図3は、正面図、そして、図4は、機器制御装置1の構成を示したブロック図である。図2〜図4において、本実施の形態における機器制御装置1は、機器制御装置筐体10の底面10aに取付られている赤外線発光器12、赤外線A受光器13、赤外線B受光器14、及び、機器制御装置筐体10の内部に内蔵されている制御部11(図2及び図3には図示されていない)で構成されている。
【0032】
この機器制御装置1は、機器制御装置筐体10の底面10aを下に向けて、部屋8の壁3に取付られており、この取付状態で、機器制御装置1に向かって左から右にかけて、順に、赤外線A受光器13、赤外線発光器12、赤外線B受光器14が一列に並んで配置されている。図2では、機器制御装置1は底面を上に向けて表示されており、図3では、機器制御装置1は底面を下に向けて表示されている。この機器制御装置1に対して、人の手のひら9は、機器制御装置筐体10の底面10aの下方にかざされる。図3及び図4において、9は、機器制御装置1にかざされている人の手のひらを表している。
【0033】
又、赤外線発光器12は、機器制御装置筐体10の底面10aに直接取付られているが、赤外線A受光器13及び赤外線B受光器14は、図2及び図3に示すように機器制御装置筐体10の底面10aに設けられた凹部である赤外線A受光器取付凹部13a及び赤外線B受光器取付凹部14aにそれぞれ取付られている。これは、赤外線発光器12が発光する光が、直接、赤外線A受光器13及び赤外線B受光器14へ入射しないようにするためである。
【0034】
即ち、上記の機器制御装置1では、機器制御装置1に人の手のひら9がかざされないとき、即ち、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近していないときは、赤外線発光器12から発光された光は赤外線A受光器13又は赤外線B受光器14に受光されないように、赤外線発光器12と赤外線A受光器13及び赤外線B受光器14とが配置されている。
【0035】
そして、機器制御装置1に人の手のひら9がかざされて、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近したときには、赤外線発光器12から発光された光が該接近した手のひら9により反射されて、手のひら9が接近した赤外線A受光器13又は赤外線B受光器14のいずれかに受光されるように、赤外線発光器12と赤外線A受光器13及び赤外線B受光器14とが配置されている。
【0036】
次に、機器制御装置1の構成について説明する。図4において、上述したように、機器制御装置1は、赤外線発光器12、赤外線A受光器13、赤外線B受光器14、及び、制御部11で構成されている。制御部11は、抵抗15、増幅回路16,17、波形整形回路18,19、マイクロプロセッサ20、ROM21、RAM22、入力回路23、及び、出力回路24で構成されている。図4において、Eは、電源を示している。又、図4では、マイクロプロセッサ20、ROM21、RAM22、入力回路23、及び、出力回路24における電源の表示は、省略されている。
【0037】
抵抗15は、発光ダイオードで構成される赤外線発光器12に接続されており、赤外線発光器12に対する赤外線発光用の電流供給に用いられる。増幅回路16,17は、それぞれ赤外線フォトトランジスタで構成される赤外線A受光器13、及び、赤外線B受光器14に接続されており、赤外線A受光器13、赤外線B受光器14の出力を増幅する。波形整形回路18,19は、それぞれ増幅回路16、及び、増幅回路17に接続され、これらの出力の波形整形を行う。波形整形回路18,19の出力は、入力回路23へ入力される。
【0038】
入力回路23は、制御ライン25を介してCPU20に接続されている。このCPU20へは、制御ライン25を介して、入力回路23のほか、ROM21、RAM22、及び、出力回路24が接続されている。又、入力回路23は、割込制御ライン26を介してCPU20に接続されている。一般的には、CPU20、ROM21、RAM22、入力回路23、及び、出力回路24は、1つの半導体チップで構成されている。
【0039】
CPU20は、マイクロプロセッサで構成されている。ROM21には、機器制御装置1の内部制御や、機器制御装置1の制御対象である照明装置2の制御に必要な、OSや各種ソフトウエアが格納されている。CPU20は、このROM21に搭載されたソフトウエアにより、各種の処理を行う。又、RAM22は、CPU20が行う処理に用いられる。
【0040】
入力回路23は、この入力回路23に入力される信号に対して、ハードウエアによる割込機能と、センス機能とを備えている。ハードウエアによる割込機能は、赤外線A受光器13、又は、赤外線B受光器14のいずれかが受光すると、割込を発生させると共に、割込制御ライン26を介してCPU20に割込発生を通知する機能である。
【0041】
このハードウエアによる割込に対しては、入力回路23は、割込の許可化/不許可を指定する割込マスク機能を備えており、割込マスクがON状態では、ハードウエアによる割込は許可されず、割込マスクがOFF状態では、ハードウエアによる割込が許可される仕組である。この割込マスクのON/OFFは、CPU20の指示に基づいて行われる。
【0042】
通常、機器制御装置1が動作を開始すると、割込マスクをOFF状態とする。割込が発生すると、割込マスクをON状態としてこの割込に対する処理を行い、この割込処理が終了した後に、再び割込マスクをOFF状態とする。
【0043】
センス機能は、赤外線A受光器13、或いは、赤外線B受光器14が、それぞれ、受光状態であるのか受光していない状態であるのかを検出する機能である。尚、本明細書では、赤外線A受光器13、或いは、赤外線B受光器14が受光していない状態を、遮光状態と称する場合もある。
【0044】
赤外線A受光器13、或いは、赤外線B受光器14が、それぞれ、受光状態であるのか遮光状態であるのかの上記の検出は、CPU20の指示に基づいて行われる。又、後述するように、赤外線A受光器13、或いは、赤外線B受光器14における受光の有無の状態は、通常、時間的に間隔を置いて変化するので、上記の検出は、上記の割込が発生後、時間的に間隔を置いて、2度行われる。
【0045】
出力回路24は、機器制御装置1の制御対象である照明装置2と接続されており、CPU20からの指示により、照明装置2を制御するのに必要な信号を照明装置2に対して出力する。
【0046】
次に、機器制御装置1の動作について説明する。機器制御装置1には、上述したように、1個の赤外線発光器12と、2個の赤外線受光器である赤外線A受光器13と赤外線B受光器14とが備えられている。そこで、照明装置2に対して、制御が必要でないときは、人の手のひら9を機器制御装置1にかざさないので、上述したように、赤外線発光器12が発光する赤外線は、これらの赤外線A受光器13、或いは、赤外線B受光器14に入射することはなく、従って、赤外線A受光器13、或いは、赤外線B受光器14が受光することはない。
【0047】
次に、部屋8にいる人が部屋8の照明装置2を制御しようとするときには、次の操作を行う。即ち、機器制御装置1の機器制御装置筐体10の底面10aの下方に、手のひら9をかざすことにより、機器制御装置1の機器制御装置筐体10の底面10aに、左から右にかけて順に一列に並んで配置されている赤外線A受光器13、赤外線発光器12、赤外線B受光器14の内の、赤外線A受光器13と、赤外線B受光器14に対して、次の操作1〜操作4のいずれかを行う。
【0048】
この操作1〜操作4は、次のような場合に行う。操作1は、照明装置2の電源をONするときに行う。操作2は、照明装置2の電源をOFFするときに行う。操作3は、照明装置2の調光UPをするときに行う。そして、操作4は、照明装置2の調光DOWNをするときに行う。
【0049】
これらの操作1〜操作4の具体的な操作方法は、次の通りである。操作1は、機器制御装置筐体10の底面10aの左側下方に手のひら9をかざす。即ち、赤外線A受光器13のみに手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13にのみ受光され、赤外線B受光器14には受光されないようにする。
【0050】
操作2は、機器制御装置筐体10の底面10aの右側下方に手のひら9をかざす。即ち、赤外線B受光器14のみに手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14のみに受光され、赤外線A受光器13には受光されないようにする。
【0051】
操作3は、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの左側下方から右側下方に移動する。即ち、最初に、赤外線A受光器13に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13に受光された後、次に、赤外線B受光器14に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14に受光されるようにする。
【0052】
そして、操作4は、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの右側下方から左側下方に移動する。即ち、最初に、赤外線B受光器14に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線B受光器14に受光された後、次に、赤外線A受光器13に手のひら9を接近させて、赤外線発光器12の発光する光が赤外線A受光器13に受光されるようにする。
【0053】
図5は、上記の操作1〜操作4が行われた場合の、赤外線A受光器13、及び、赤外線B受光器14の出力が、波形整形回路18、又は、波形整形回路19で波形整形されて出力された状態を示したタイムチャートである。ここで、赤外線A受光器13の出力の波形整形回路18による波形整形出力を、出力Aと称する。そして、赤外線A受光器13が受光状態における出力Aを、出力レベル「1」と称し、出力A=1と表す。又、赤外線A受光器13が遮光状態における出力Aを、出力レベル「0」と称し、出力A=0と表す。
【0054】
同様にして、赤外線B受光器14の出力の波形整形回路19による波形整形出力を、出力Bと称する。そして、赤外線B受光器14が受光状態における出力Bを、出力レベル「1」と称し、出力B=1、と表す。又、赤外線B受光器14が遮光状態における出力Bを、出力レベル「0」と称し、出力B=0と表す。
【0055】
上述したように、入力回路23は、入力回路23に入力される信号に対して、ハードウエアによる割込機能と、センス機能とを備えている。この内、ハードウエアによる割込機能では、出力A=1、又は、出力B=1の場合に割込が発生する。又、センス機能では、CPU20が入力回路23にアクセスすることにより、出力A、及び、出力Bが、それぞれ、出力レベル「1」であるのか、出力レベル「0」であるのかを検出する。この検出を、出力Aをセンスする、或いは、出力Bをセンスすると称する。
【0056】
この出力A、及び、出力Bは、図5に示すように、時間的に間隔を置いて変化するので、上記の出力A、及び、出力Bのセンスは、上記の割込が発生後、時間的に間隔を置いて2度行われ、先に行われるセンスの対象となる出力を、先出力、後に行われるセンスの対象となる出力を、後出力と称する。尚、図5において、タイムチャートのHighレベルが、上記の出力レベル「1」を表し、Lowレベルが、上記の出力レベル「0」を表す。
【0057】
又、図5では、先出力の出力レベルと後出力の出力レベルとが共に「1」となる操作3、及び、操作4のケースでは、先出力の出力レベルが「1」から「0」になった後、後出力の出力レベルが「0」から「1」になった場合を示している。しかし、先出力の出力レベルが「1」から「0」になる前に後出力の出力レベルが「0」から「1」になる場合もあり得る。
【0058】
この場合に、先出力に対するセンスの時点(図5のT1)、及び、後出力に対するセンスの時点(図5のT2)において、出力A、又は、出力Bのいずれかのみが出力レベル「1」であれば、問題は生じない。これらの先出力、及び、後出力に対するセンスのタイミングは、後述するように、これらの点を考慮して設定される。
【0059】
機器制御装置1は、上記の操作1〜操作4に伴って、照明装置2に対する制御を行うために、ROM21やRAM22に、次のようなデータや記録エリアを備えている。即ち、機器制御装置1は、ROM21に、図6に示す判定基準パターンと図7に示す照明装置制御指令をデータとして備えている。又、RAM22には、図8に示すセンス結果記録エリアを備えている。又、機器制御装置1は、ソフトウエアで実現されるタイマであるタイマTM1、タイマTM2、及び、タイマTM3を備えている。
【0060】
図6に示す判定基準パターンは、パターン番号欄、先出力欄、及び、後出力欄で構成され、先出力欄、及び、後出力欄は、それぞれ、出力A欄と出力B欄とで構成されている。パターン番号欄には、第1パターン〜第4パターンが用意されている。この第1パターン〜第4パターンは、上記の操作1〜操作4に対応しており、これらの各パターンに対して、それぞれ、先出力欄及び後出力欄の各出力A欄には、上記の出力Aの出力レベルに対応して、「1」又は「0」が設定されている。同様に、先出力欄及び後出力欄の各出力B欄には、上記の出力Bの出力レベルに対応して、「1」又は「0」が設定されている。
【0061】
図7に示す照明装置制御指令には、照明装置2に対する制御指令内容として、上記の第1パターン〜第4パターンに対応する制御指令内容が設定されている。又、図8に示すセンス結果記録エリアは、先出力欄と後出力欄とで構成され、先出力欄、及び、後出力欄は、それぞれ、出力A欄と出力B欄とで構成されている。これらの先出力欄、及び、後出力欄の出力A欄には、出力Aに対するセンス結果に従って、「1」又は「0」が記録され、出力B欄には、同じく、出力Bに対するセンス結果に従って、「1」又は「0」が記録される。
【0062】
タイマTM1、及び、タイマTM2は、CPU20が、出力A及び出力Bに対して、時間差を置いてセンスを行うための時点を設定するのに用いられる。又、タイマTM3は、機器制御装置1の誤動作を防止するために、割込マスクをON状態とする期間を十分確保するのに用いられる。これらの各タイマの動作と先出力、及び、後出力に対するセンスタイミングは、図5に示す通りである。
【0063】
即ち、T0で出力A=1、又は、出力B=1となると、割込が発生する。すると、割込みマスクがON状態となり、同時に、タイムアップ時間がt1であるタイマTM1がスタートする。T1でタイマTM1がタイムアップすると、先出力に対するセンスが行われると同時に、タイムアップ時間がt2であるタイマTM2がスタートする。T2でタイマTM2がタイムアップすると、後出力に対するセンスが行われると同時に、タイムアップ時間がt3であるタイマTM3がスタートする。T3でタイマTM3がタイムアップすると、割込みマスクがOFF状態となる。
【0064】
上記のタイマTM1で設定される時間t1、及び、タイマTM2で設定される時間t2は、例えば、上記の操作3、或いは、操作4において、機器制御装置筐体10の底面10aの下方に手のひら9をかざして、底面10aの左側下方から右側下方に移動する時間、或いは、底面10aの右側下方から左側下方に移動する時間を考慮して、設定する必要がある。即ち、これらの操作が最も自然に行われる場合を想定すると共に、想定されたケースの範囲内におけるこれらの操作により、先出力及び後出力に対するセンスが正確に行われるように設定する必要がある。タイマTM3で設定される時間t3については、後述する。
【0065】
次に、機器制御装置1の具体的な動作について説明する。図9及び図10は、機器制御装置1の具体的な動作を示したフローチャートである。図9及び図10において、まず、CPU20は、割込みマスクをOFF状態とすると共に(S1)、センス結果記録エリアをクリアする(S2)。
【0066】
次に、出力A=1、又は、出力B=1となることによる割込発生の有無をチェックし(S3)、割込が生じると(図5のT0)(S4)、割込みマスクをON状態とすると共に(S5)、タイマTM1をスタートさせる(S6)。
【0067】
タイマTM1がタイムアップすると(図5のT1)(S7)、出力Aをセンスして、センス結果を、センス結果記録エリアの先出力欄の出力A欄に記録すると共に(S8)、出力Bをセンスして、センス結果を、センス結果記録エリアの先出力欄の出力B欄に記録する(S9)。そして、タイマTM2をスタートさせる(S10)。
【0068】
タイマTM2がタイムアップすると(図5のT2)(S11)、出力Aをセンスして、センス結果を、センス結果記録エリアの後出力欄の出力A欄に記録すると共に(S12)、出力Bをセンスして、センス結果を、センス結果記録エリアの後出力欄の出力B欄に記録する(S13)。
【0069】
次に、センス結果記録エリアの記録内容を、ROM21に備えられている判定基準パターンと照合して、一致するパターン番号を抽出する(S14)。センス結果記録エリアの記録内容と一致するパターン番号が判定基準パターンに存在する場合は(S15)、判定基準パターンから抽出されたパターン番号と同一のパターン番号の制御指令内容を、照明装置制御指令の中から抽出すると共に(S16)、抽出された制御指令内容を、照明装置2へ送信する(S17)。これにより、照明装置2が、制御される。
【0070】
そして、タイマTM3をスタートさせ(S18)、タイマTM3がタイムアップすると(S19)、最初のステップに戻って(S1)、上記の処理を繰返す。即ち、タイマTM3は、上述したように、割込マスクをON状態とする期間を十分確保するために使用される。
【0071】
これは、機器制御装置1に対する手のひら9をかざす最初に行われた操作の後に、続いて行われる次の操作である手のひら9をかざす操作に対して、最初に行われた手のひら9をかざす操作による影響が及ばないようにするためである。即ち、割込マスクをON状態とする期間を十分確保することによって、続いて行われた次の手のひら9をかざす操作が、最初に行われた手のひら9をかざす操作の直後に行われた場合には、この続いて行われた次の操作に起因する割り込みを禁止することによって、この続いて行われた次の操作を無視するようにしているのである。このような仕組をとることにより、機器制御装置1における手のひら9をかざす操作による誤動作を防止している。
【0072】
S14における、センス結果記録エリアの記録内容をROM21に備えられている判定基準パターンと照合して、一致するパターン番号を抽出するプロセスにおいて、センス結果記録エリアの記録内容と一致するパターン番号が判定基準パターンに存在しない場合は(S15)、S16、及び、S17を行わずに、S18へ進む。即ち、この場合は、機器制御装置1に手のひら9がかざされてなされた操作が、上述の操作1〜操作4のいずれにも該当しない場合であるので、照明装置2に対しては、何らの制御指令も行われないことになるのである。
【0073】
このように、照明装置2に対しては、何らの制御指令も行われない場合としては、図8のセンス結果記録エリアの記録内容が、例えば、先出力欄の出力A欄もB欄も共に1であるような場合が考えられる。この場合は、機器制御装置1に手のひら9がかざされた際に、赤外線発光器12の発光する光が、赤外線A受光器13に受光されると同時に、赤外線B受光器14にも受光された場合であり、一種の誤操作と考えられる。
【0074】
このように、上述したようなセンス結果記録エリアの記録内容を判定基準パターンと照合する方法を採用することにより、判定基準パターンに設定されないパターンを、誤操作によるパターンと捉えることによって、機器制御装置1に対する誤操作を排除することができる。
【0075】
上記の機器制御装置1によれば、機器制御装置1が備える赤外線A受光器13及び赤外線B受光器14に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を、制御対象の機器である照明装置2に対して行うことができる。従って、単に制御対象の機器である照明装置2の電源のON/OFFをするのみならず、そのほかの調光UPや調光DOWN制御操作を含めて、照明装置2に対する全ての制御操作を、人の手のひら9により非接触で行うことができる。
【0076】
上記の機器制御装置1では、機器制御装置筐体10は、赤外線発光器12、赤外線A受光器13、及び、赤外線B受光器14を備えた機器制御装置筐体10の底面10aを下に向けて、即ち、床に向けて、部屋8の壁3に取付られているが、赤外線発光器12、赤外線A受光器13、及び、赤外線B受光器14を備えた機器制御装置筐体10の底面10aを、床に対して垂直になるように、横に向けて取付るようにしてもよい。この場合は、手のひら9は、機器制御装置1に対して、例えば、上から下へ、或いは、下から上へ移動させてかざすことになる。
【0077】
又、上記の機器制御装置1では、赤外線を発光する赤外線発光器12と、赤外線を受光する赤外線A受光器13、及び、赤外線B受光器14とを用いている。このように、発光及び受光される光として、赤外線を用いているので、可視光線等の外乱光に対して、ノイズ耐性に優れた機器制御装置1を構成することができる。しかし、上記のような機器制御装置を構成するのに際しては、発光や受光は、赤外線には限られず、可視光線等を用いるようにしてもよい。
【0078】
又、上記の機器制御装置1では、1個の赤外線発光器12と、赤外線受光器として、赤外線A受光器13、及び、赤外線B受光器14の2個の赤外線受光器を用いている。しかし、これには限られず、赤外線発光器として、赤外線A受光器13、及び、赤外線B受光器14のそれぞれに、専用の赤外線発光器を2個用いるようにしてもよい。この場合は、赤外線発光器と赤外線受光器とが一体で構成されている光学センサ等を2個用いると、性能やコストの点で好適である。
【0079】
又、上記の機器制御装置1では、機器制御装置1に対する手のひら9による非接触の操作としては、上述した操作1〜操作4の4種類の操作を用いているが、これ以外の手のひら9による非接触の操作を加えるようにすることもできる。例えば、手のひら9を、赤外線A受光器13から赤外線B受光器14に向かって移動させた後、さらに、赤外線A受光器13へ戻るように、赤外線B受光器14から赤外線A受光器13に移動させることで一つの操作を構成する等の、往復移動や繰り返し移動を伴う操作を導入する等である。
【0080】
又、上記の機器制御装置1では、赤外線受光器として、赤外線A受光器13、及び、赤外線B受光器14の2個の赤外線受光器を用いている。しかし、これには限られず、赤外線受光器として、3個以上の赤外線受光器を用いても、上記の本実施の形態における機器制御装置1と同様の仕組で、機器制御装置を構成することができる。
【0081】
即ち、この場合は、機器制御装置に組込まれる赤外線受光器の個数を3個以上とする。そして、上記の本実施の形態における機器制御装置1において、例えば、判定基準パターン、及び、センス結果記録エリアにおける、先出力欄及び後出力欄に代えて、赤外線受光器の個数に相当する複数の出力欄を設けると共に、先出力欄及び後出力欄に代わるこれらの各出力欄に、赤外線受光器の個数に相当する個別の出力欄を設ける。そして、機器制御装置のCPUが、これら全ての赤外線受光器の出力をセンスするようにすることにより、実現することができる。
【0082】
又、上記の機器制御装置1では、機器制御装置1に人の手のひら9がかざされないとき、即ち、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近していないときは、赤外線発光器12から発光された光は赤外線A受光器13又は赤外線B受光器14に受光されない。即ち、赤外線A受光器13又は赤外線B受光器14は、遮光されている。
【0083】
そして、機器制御装置1に人の手のひら9がかざされて、赤外線A受光器13又は赤外線B受光器14に人の手のひら9が接近したときには、赤外線発光器12から発光された光が該接近した手のひら9により反射されて、手のひら9が接近した赤外線A受光器13又は赤外線B受光器14のいずれかに受光される。
【0084】
即ち、上記の機器制御装置1では、赤外線が人の手のひら9で反射されることを利用した方式を採用している。しかし、このような方式には限られず、人の手のひら9で赤外線を遮光する方式を用いて、機器制御装置を構成することもできる。図11は、このような方式を用いた機器制御装置30の外観図である。図11では、機器制御装置30は、上面を上に向けて表示されている。機器制御装置30はこの状態で部屋の壁に取付られる。
【0085】
図11において、機器制御装置30には、水平方向に切込部30aが形成されており、この切込部30aの上側に上部筐体部30bが形成され、切込部30aの下側に下部筐体部30cが形成されている。下部筐体部30cの上面には、上方に向けて、赤外線A発光器31及び赤外線B発光器32の2個の赤外線発光器が備えられている。又、下部筐体部30cの下面には、下方に向けて、赤外線A発光器31と対面するように赤外線A受光器33が備えられ、この赤外線A発光器31に並べて、赤外線B発光器32と対面するように赤外線B受光器34が備えられている。この機器制御装置30に対しては、人の手のひらは、機器制御装置30に形成されている水平な切込部30a内に挿入することにより、かざされる。
【0086】
上記の機器制御装置30では、機器制御装置30に人の手のひらがかざされないとき、即ち、赤外線A受光器33又は赤外線B受光器34に人の手のひらが接近していないときは、赤外線A発光器31から発光された光は赤外線A受光器33で受光され、赤外線B発光器32から発光された光は赤外線B受光器34で受光される。
【0087】
そして、機器制御装置30に人の手のひらがかざされて、赤外線A受光器13に人の手のひらが接近したときは、赤外線A発光器31から発光された光は、人の手のひらで遮光されて赤外線A受光器33では受光されない。又、赤外線B受光器34に人の手のひらが接近したときは、赤外線B発光器32から発光された光は、人の手のひらで遮光されて赤外線B受光器34では受光されない。
【0088】
又、上記の機器制御装置30の構成としては、上述した本実施の形態における機器制御装置1と同様に構成する。即ち、赤外線A発光器31、及び、赤外線B発光器32に電源Eを供給すると共に、赤外線A受光器33の出力を増幅回路16に接続し、赤外線B受光器34の出力を増幅回路17に接続する。又、入力回路23における割り込みの発生は、赤外線A受光器33、又は、赤外線B受光器34のいずれかが遮光されると、発生されるようにすると共に、上述した本実施の形態における機器制御装置1の制御の仕組において、受光と遮光とを全て入れ替えることにより、上述した本実施の形態における機器制御装置1の機能と同様の機能を実現することができる。
【0089】
又、上記の機器制御装置30においても、上述した本実施の形態における機器制御装置1と同様、機器制御装置30の底面を、床に対して垂直になるように、横に向けて取付るようにしてもよい。この場合は、手のひらは、機器制御装置30に対して、例えば、上から下へ、或いは、下から上へ、切込部30a内を移動させてかざすことになる。
【0090】
上述した実施の形態では、機器制御装置の制御の対象となる機器として照明装置を用いて説明しているが、機器制御装置の制御の対象となる機器としては、これには限られず、電気信号による制御が可能な装置であれば、いかなる装置も機器制御装置の制御の対象とすることができる。
【図面の簡単な説明】
【0091】
【図1】本実施の形態における機器制御装置及びこの機器制御装置の制御対象である照明装置が用いられている状態を示した説明図である。
【図2】本実施の形態における機器制御装置の外観図である。
【図3】本実施の形態における機器制御装置の正面図である。
【図4】本実施の形態における機器制御装置の構成を示したブロック図である。
【図5】本実施の形態における機器制御装置の操作1〜操作4に関する出力A及び出力Bのタイムチャートである。
【図6】本実施の形態における機器制御装置の判定基準パターンを示したテーブルである。
【図7】本実施の形態における機器制御装置の照明装置制御指令を示したテーブルである。
【図8】本実施の形態における機器制御装置のセンス結果記録エリアを示したテーブルである。
【図9】本実施の形態における機器制御装置の動作を示したフローチャート(その1)である。
【図10】本実施の形態における機器制御装置の動作を示したフローチャート(その2)である。
【図11】他の実施の形態における機器制御装置の外観図である。
【符号の説明】
【0092】
1 機器制御装置
2 照明装置
3 壁
4 天井
8 部屋
9 人の手のひら
10 機器制御装置筐体
10a 機器制御装置筐体底面
11 制御部
12 赤外線発光器
13 赤外線A受光器
13a 赤外線A受光器取付凹部
14 赤外線B受光器
14a 赤外線B受光器取付凹部
15 抵抗
16 増幅回路
17 増幅回路
18 波形整形回路
19 波形整形回路
20 CPU
21 ROM
22 RAM
23 入力回路
24 出力回路
25 制御ライン
26 割込制御ライン
30 機器制御装置
30a 切込部
30b 上部筐体部
30c 下部筐体部
31 赤外線A発光器
32 赤外線B発光器
33 赤外線A受光器
34 赤外線B受光器
【特許請求の範囲】
【請求項1】
単又は複数の発光器と、並べて配置された複数の受光器とを備えると共に、
該受光器に人の手のひらが接近しないときは、前記発光器から発光された光が前記受光器に受光されず、前記受光器に前記人の手のひらが接近したときは、前記発光器から発光された光が該接近した手のひらにより反射されて前記受光器に受光されるような前記人の手のひらの接近による動作である手のひら接近動作が可能なように、前記発光器と前記受光器とが配置されており、
特定の前記受光器のみに対して行われる前記手のひら接近動作、又は、複数の前記受光器に対して時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴とする機器制御装置。
【請求項2】
単又は複数の発光器と、並べて配置された複数の受光器とを備えると共に、
該受光器に人の手のひらが接近しないときは、前記発光器から発光された光が前記受光器に受光され、前記受光器に前記人の手のひらが接近したときは、前記発光器から発光された光が該接近した手のひらにより遮光されて前記受光器に受光されないような前記人の手のひらの接近による動作である手のひら接近動作が可能なように、前記発光器と前記受光器とが配置されており、
特定の前記受光器のみに対して行われる前記手のひら接近動作、又は、複数の前記受光器に対して時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴とする機器制御装置。
【請求項3】
2個の前記受光器を備えており、一方の前記受光器又は他方の前記受光器のみに対して行われる前記手のひら接近動作、若しくは、一方の前記受光器から他方の前記受光器に対して、又は、他方の前記受光器から一方の前記受光器に対して、時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、前記制御を行う請求項1又は2記載の機器制御装置。
【請求項4】
前記発光器から発光されて前記受光器に受光される光が、赤外線である請求項1〜3のいずれか1項に記載の機器制御装置。
【請求項5】
前記制御される対象の前記機器が、照明装置である請求項1〜4のいずれか1項に記載の機器制御装置。
【請求項1】
単又は複数の発光器と、並べて配置された複数の受光器とを備えると共に、
該受光器に人の手のひらが接近しないときは、前記発光器から発光された光が前記受光器に受光されず、前記受光器に前記人の手のひらが接近したときは、前記発光器から発光された光が該接近した手のひらにより反射されて前記受光器に受光されるような前記人の手のひらの接近による動作である手のひら接近動作が可能なように、前記発光器と前記受光器とが配置されており、
特定の前記受光器のみに対して行われる前記手のひら接近動作、又は、複数の前記受光器に対して時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴とする機器制御装置。
【請求項2】
単又は複数の発光器と、並べて配置された複数の受光器とを備えると共に、
該受光器に人の手のひらが接近しないときは、前記発光器から発光された光が前記受光器に受光され、前記受光器に前記人の手のひらが接近したときは、前記発光器から発光された光が該接近した手のひらにより遮光されて前記受光器に受光されないような前記人の手のひらの接近による動作である手のひら接近動作が可能なように、前記発光器と前記受光器とが配置されており、
特定の前記受光器のみに対して行われる前記手のひら接近動作、又は、複数の前記受光器に対して時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、該パターンと対応付けられた内容の制御を制御対象の機器に対して行うことを特徴とする機器制御装置。
【請求項3】
2個の前記受光器を備えており、一方の前記受光器又は他方の前記受光器のみに対して行われる前記手のひら接近動作、若しくは、一方の前記受光器から他方の前記受光器に対して、又は、他方の前記受光器から一方の前記受光器に対して、時間差を置いて順に行われる前記手のひら接近動作により、前記複数の受光器に生じる受光の有無の時間的変化のパターンに従って、前記制御を行う請求項1又は2記載の機器制御装置。
【請求項4】
前記発光器から発光されて前記受光器に受光される光が、赤外線である請求項1〜3のいずれか1項に記載の機器制御装置。
【請求項5】
前記制御される対象の前記機器が、照明装置である請求項1〜4のいずれか1項に記載の機器制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−236532(P2008−236532A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−74987(P2007−74987)
【出願日】平成19年3月22日(2007.3.22)
【出願人】(505455945)コイズミ照明株式会社 (65)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年3月22日(2007.3.22)
【出願人】(505455945)コイズミ照明株式会社 (65)
【Fターム(参考)】
[ Back to top ]