
機器配置検出システム、機器配置検出方法および機器
【課題】新たな機器の位置を測定することで、測定可能エリアを拡張したり、測定精度を向上させたりすることのできる機器配置検出システムを提供する。
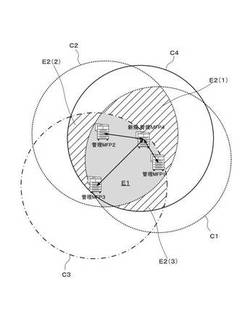
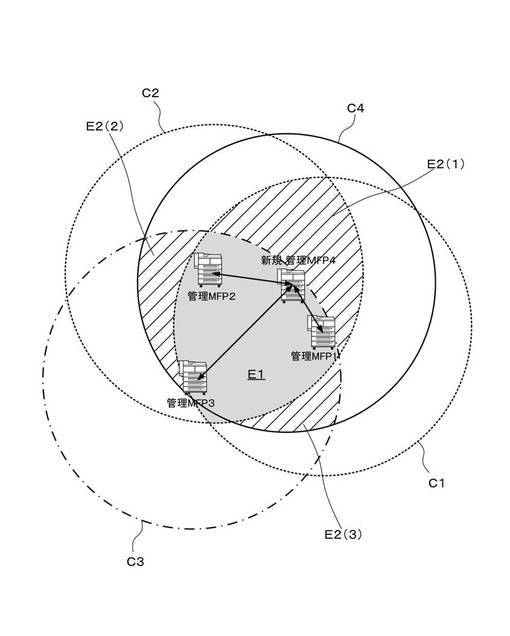
【解決手段】位置情報が既知の管理MFP1、2、3と新規管理MFP4との間で無線通信を行ったときの無線強度から、管理MFP1、2,3と新規管理MFP4との距離を測定し、これらの距離と管理MFP1、2、3の既知の位置情報とから、新規管理MFP4の位置情報を導出する。こうして導出した新規管理MFP4を、他の機器の位置を測定する際に、位置情報が既知の管理MFPの1つに加える。これにより、位置検出可能な範囲は、管理MFP1、2、3のとき図中のE1であったものが、新規管理MFP4を加えることでE1+E2に拡張される。
【解決手段】位置情報が既知の管理MFP1、2、3と新規管理MFP4との間で無線通信を行ったときの無線強度から、管理MFP1、2,3と新規管理MFP4との距離を測定し、これらの距離と管理MFP1、2、3の既知の位置情報とから、新規管理MFP4の位置情報を導出する。こうして導出した新規管理MFP4を、他の機器の位置を測定する際に、位置情報が既知の管理MFPの1つに加える。これにより、位置検出可能な範囲は、管理MFP1、2、3のとき図中のE1であったものが、新規管理MFP4を加えることでE1+E2に拡張される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、オフィスなどでプリンタや複合機などの機器の設置位置を検出する機器配置検出システム、機器配置検出方法、および別の機器の配置検出機能を有する機器に関する。
【背景技術】
【0002】
オフィスなどにおいては、プリンタや複合機などの機器を複数台配置し、これらをネットワーク上の多くのPC(パーソナルコンピュータ)で共有するシステム環境が多くあり、このような環境では、機器のレイアウトマップを作成して、配置が適切か否かを評価するといったことが行われる。
【0003】
レイアウトマップの作成技術としては、たとえば、構内無線LAN(Local Area Network)システムにおいて、位置情報が事前に分かっている固定された3つのアクセスポイントのそれぞれから、位置検出対象の機器と無線通信し、そのときの電波強度に基づいて各アクセスポイントからの距離を測定し、三角測量により機器の位置情報を求めてレイアウトマップの作製をするシステムがある(特許文献1、図18、21参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−49538号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示のシステムでは、電波強度の測定は、機器と、固定的に設置された位置情報が既知の3つのアクセスポイントとの間で行うので、位置検出対象の機器は、3つのアクセスポイント全部から電波が届く範囲内にある必要があり、測定可能エリアが限られたものになっていた。
【0006】
また、位置検出対象の機器との距離の測定に利用可能なアクセスポイントは限られてしまうので、そのアクセスポイントと位置検出対象の機器との間のフロア上に電波を遮る障害物などがあると、電波強度の測定精度が下がり、位置の検出精度が著しく悪化してしまう、という問題もあった。
【0007】
本発明は、上記の問題を解決しようとするものであり、新たな機器の位置を測定することで、測定可能エリアを拡張したり、測定精度を向上させたりすることのできる機器配置検出システム、機器配置検出方法、および機器を提供することを目的としている。
【課題を解決するための手段】
【0008】
かかる目的を達成するための本発明の要旨とするところは、次の各項の発明に存する。
【0009】
[1]無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部と、
無線通信機能を備えた位置検出対象の機器と前記機器登録部に登録されている中の少なくとも3台の機器のそれぞれとの間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した前記位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録する機器追加登録部と、
を有する
ことを特徴とする機器配置検出システム。
【0010】
上記発明では、機器登録部には、位置情報が既知の少なくとも3台の機器が登録されており、該登録されている中の少なくとも3台の機器と、位置検出対象の機器との間で無線通信したときの電波強度から、位置が既知の各機器と位置検出対象の機器との距離を求め、これらの距離と位置が既知の各機器の位置情報とから、三角測量法などにより、位置検出対象の機器の位置情報を求める。そして、この位置情報の導出された機器を、機器登録部に追加登録する。すなわち、追加登録した機器は、別の機器の位置を検出する際には、位置が既知の機器の1つとなり、測定範囲の拡張や測定精度の向上に貢献する。
【0011】
[2]前記位置検出部は、前記機器登録部に登録されている機器の中から前記位置検出対象の機器の位置情報の導出に使用する前記少なくとも3台の機器を、導出する位置情報の精度が高まるものを優先して、選定する
ことを特徴とする[1]に記載の機器配置検出システム。
【0012】
上記発明では、機器登録部に登録されている機器の中から位置情報の導出に使用する機器を選択する際に、導出される位置情報の精度が高まるように、選択する。たとえば、機器登録部に登録されている位置情報の精度が高いものを使用するほど、その位置情報を基準にして導出される位置情報の精度は高まる。また、位置検出対象の機器との距離が短いほど、電波強度による距離の測定精度は高まる。これら精度に寄与する1または複数の要素を勘案して、位置精度が高まるように、測定の基準となる機器を選択する。
【0013】
[3]前記機器登録部に登録された位置情報には、その位置情報の信頼性を示す信頼度が付与されており、
前記位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて、信頼度決定部が決定し、
前記位置検出部は、信頼性の高い位置情報を優先して、前記選定を行う
ことを特徴とする[2]に記載の機器配置検出システム。
【0014】
上記発明では、機器登録部に登録されている各位置情報にはその位置情報の信頼性(精度)を示す信頼度が付与されている。また、位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて決定される。すなわち、導出された位置情報の信頼度は、その導出の基準となった機器の位置情報より信頼性の低い値にする。そして、測定の基準となる機器を選択する場合、信頼性の高いものを優先する。これにより、導出される位置情報の精度を高めることができる。
【0015】
[4]前記位置検出部は、前記導出に使用する少なくとも3台の機器の組み合わせを複数組設定し、組毎に、前記位置検出対象の機器の位置情報を導出し、これら複数の位置情報に基づいて、前記位置検出対象の機器に対する最終的な位置情報を導出する
ことを特徴とする[1]に記載の機器配置検出システム。
【0016】
上記発明では、導出の基準となる3台の機器の組み合わせを複数組設定可能な場合には、組毎に位置情報を導出し、これら複数の位置情報に基づいて位置検出対象の機器に対する最終的な位置情報を導出する。たとえば、複数の位置情報に対して中央値、平均値、偏差など統計的手法を適用することで、より精度良く、位置情報を導出することができる。
【0017】
[5]前記組毎に導出した複数の位置情報の中から精度不良の位置情報を除外した位置情報に基づいて、前記最終的な位置情報を導出する
ことを特徴とする[4]に記載の機器配置検出システム。
【0018】
上記発明では、精度不良の測定位置は除外して、最終的な位置情報を決定する。
【0019】
[6]前記位置検出部で求めた前記位置検出対象の機器の位置情報を、前記機器登録部に登録されている機器に送信する送信部を有する
ことを特徴とする[1]乃至[5]のいずれか1つに記載の機器配置検出システム。
【0020】
上記発明では、導出した位置検出対象の機器の位置情報が各機器で共有される。
【0021】
[7]前記機器登録部に登録されている情報に基づいて、前記機器登録部に登録されている機器の配置レイアウトマップを作成するマップ作成部を備え、
前記マップ作成部が作成した配置レイアウトマップを所定の表示部に表示させる
ことを特徴とする[1]乃至[6]のいずれか1つに記載の機器配置検出システム。
【0022】
上記発明では、機器の位置が示された配置レイアウトマップが作成されて表示される。
【0023】
[8]機器の状態情報を取得する機器状態取得部を有し、
前記マップ作成部は、前記機器状態取得部が取得した状態情報に基づいて、前記配置レイアウトマップ内に機器の状態を表示する
ことを特徴とする[7]に記載の機器配置検出システム。
【0024】
上記発明では、配置レイアウトマップ内に各機器の状態情報が表示される。たとえば、各機器がビジーであるか否か、各機器の給紙トレイの状態(紙の有無や、残量、サイズなど)などが表示される。この表示は、使用する機器をユーザが選択する際の補助情報となる。
【0025】
[9]情報処理装置が、無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部の中の少なくとも3台の機器のそれぞれと無線通信機能を備えた位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出するステップと、
情報処理装置が、前記ステップで導出した位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録するステップと、
を有する
ことを特徴とする機器配置検出方法。
【0026】
[10]無線通信部と、
位置情報が既知の他の機器から該機器の位置情報と該機器が位置検出対象の機器と無線通信したときの信号強度とを取得する取得部と、
自装置の位置情報と、前記無線通信部で前記位置検出対象の機器と無線通信したときの信号強度と、前記取得部によって少なくとも2台の他の機器から取得した位置情報および信号強度とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した位置情報を前記位置検出対象の機器に送信する送信部と、
を備え、
前記位置検出部が位置情報を導出した前記機器を、位置情報が既知の他の機器の1つに加えて、別の機器の位置情報を導出する
ことを特徴とする機器。
【発明の効果】
【0027】
本発明に係る機器配置検出システム、機器配置検出方法、および機器によれば、新たな機器の位置を測定することで、測定可能エリアが自動的に拡張され、また測定精度を向上させることができる。
【図面の簡単な説明】
【0028】
【図1】電波強度による距離測定の概念を示す説明図である。
【図2】3台の管理MFPで新たな機器の位置を導出する際の概念を示す説明図である。
【図3】位置情報の導出された機器を管理MFPに追加する概念を示す説明図である。
【図4】管理MFPの追加により位置検出可能な範囲が拡張される様子を示す説明図である。
【図5】第1方式の機器配置検出システムのシステム構成例を示す説明図である。
【図6】第1方式の機器配置検出システムの画像形成装置(MFP)の概略構成を示すブロック図である。
【図7】遠隔管理サーバの概略構成を示すブロック図である。
【図8】機器登録リストを示す説明図である。
【図9】第1方式の機器配置検出システムの設置例を示す説明図である。
【図10】MPSに必要な情報とその取得方法を示す一覧表である。
【図11】図9の構成において、プリンタ1の位置検出を行う場合における第1方式の機器配置検出システムの動作シーケンスを示すシーケンス図である。
【図12】第2方式による機器配置検出システムのシステム構成例と利用形態を示す説明図である。
【図13】第2方式による機器配置検出システムの画像形成装置(MFP)の概略構成を示すブロック図である。
【図14】第2方式による機器配置検出システムの画像形成装置(MFP)の動作を示す流れ図である。
【図15】図14の処理によって、位置検出されたプリンタ1が、管理MFPの1つに参加するように変遷する動作シーケンスを示すシーケンス図である。
【図16】信頼度に関する説明図である。
【図17】信頼度に基づいて、位置検出に使用する管理MFPを選択する場合の動作のシーケンスの一例を示すシーケンス図である。
【図18】4台の管理MFPから3台の組み合わせを4組設定する場合を示す説明図である。
【図19】精度不良の測定位置を除去して位置決定する様子を示す説明図である。
【図20】プリンタ1の位置を管理MFP1〜4に対して除外法を適用して求める場合の動作シーケンスを示すシーケンス図である。
【図21】本発明をPCに適用した場合の構成例を示す説明図である。
【発明を実施するための形態】
【0029】
以下、図面に基づき本発明の実施の形態を説明する。
【0030】
まず、本発明における電波強度を利用した測定について説明する。
【0031】
図1は、2つの機器間(プリンタと画像形成装置10との間)で無線通信を行った場合の電波強度と、機器間の距離との関係を示している。電波強度は、利用する周波数帯などにより減衰特性は異なるものの、発信元からの距離が離れるにつれて減衰する。つまり、距離が遠くになるにつれ、電波強度も弱くなる。電波強度は、無線通信機能を有する機器で測定可能なので、この機能を利用して機器間のおおよその距離を測定することができる。
【0032】
たとえば、近年のプリンタには、Bluetooth(登録商標)や無線LANなど、無線通信でデータを送受信する機能が内蔵されているものが多く、無線通信時の電波強度を計測することで機器間の距離を調べることができる。本発明では、無線通信は、数十mを到達可能距離としたBluetoothなどの近距離無線通信が適しており、さらには通信強度が規格化されたものが好ましい。
【0033】
通信強度(発信する電波の強度)を複数段階に変更可能な無線通信においては、通信強度を変えながら相手機と通信を行い、どの通信強度まで通信可能であり、どの通信強度で通信不可となったかによって、通信相手との距離を認識することができる。たとえば、通信強度を1〜10までの10段階に変更可能とし、1段階高める毎に通信可能距離が2m増えるものとすれば、通信可能な最小通信強度が1段階のとき、機器間の距離Lは0≦L<2m、最小通信強度が2段階のときは2≦L<4m、最小通信強度が3段階のときは4≦L<6m、・・ というように算出することができる。たとえば、通信強度を変えて所定のコマンドを送信し、それに対する応答が相手機から来れば通信可能な通信強度(電波強度)と判定し、応答がなければ通信できない電波強度と判定して、最小通信強度を送信側で特定することができる。
【0034】
図2は、三角測量によって機器の位置を特定する様子を示している。なお、画像形成装置10をMFPと表し、MFP1、MFP2、MFP3…などのように末尾の番号は機器を識別するための番号とする。また、プリンタを示す場合についても、プリンタ1、プリンタ2、プリンタ3…のように末尾の番号は各プリンタの識別番号とする。
【0035】
図2において、MFP1、MFP2,MFP3の各位置が既知であれば、プリンタ1の位置は、MFP1とプリンタ1との距離Aと、MFP2とプリンタ1との距離Bと、MFP3とプリンタ1との距離Cから、三角測量法によって導出することができる。なお、位置が既知のMFPが4か所以上に存在する場合は、4台以上の各MFPとプリンタ1との間でそれぞれ計測した距離を統計的に集計することで、より精度の高い位置計測が可能となる。
【0036】
以後、位置が既にわかっており、他の機器の位置を求めるための基準となる機器(図2のMFP1、2、3など)を管理MFPと呼ぶものとする。
【0037】
本発明では、図3に示すように、位置が既知の3台の管理MFP1〜3と位置検出対象のMFP4との間の距離A、B、Cを、これらの間の電波強度に基づいて求めてMFP4の位置を導出する。そして、MFP4の位置が求まると、以後は、該MFP4を、別の機器の位置を検出する際に利用可能な管理MFPの1つに加えるようになっている。
【0038】
図4は、管理MFP4が加わることによって位置検出可能エリアが拡張された様子を示している。管理MFP1〜4のそれぞれを中心とする円は、その管理MFPの通信可能エリアを示しており、この円内に存在する機器までの距離を測定することができる。管理MFP4が加わる前の状態、すなわち、管理MFP1〜3のみが存在するときは、管理MFP1の通信可能エリアC1と、管理MFP2の通信可能エリアC2と、管理MFP3の通信可能エリアC3が全て重複する領域E1(図中、グレーで塗りつぶした領域)が、新たな機器の位置を検出可能な領域である。この領域E1内にあったMFP4が管理MFPの1つに加わることで、位置検出可能な領域は、既存の領域E1と、新たに増加した領域E2(図中、斜線を施した領域)とを併せた領域に拡張される。
【0039】
同図では、拡張された位置検出可能な領域E2は、管理MFP1と管理MFP2と管理MFP4の通信可能エリアC1、C2、C4が重複している領域E2(1)と、管理MFP2と管理MFP3と管理MFP4の通信可能エリアC2、C3、C4が重複している領域E2(2)と、管理MFP1と管理MFP3と管理MFP4の通信可能エリアC1、C3、C4が重複している領域E2(3)で構成される。
【0040】
また、管理MFP1〜管理MFP4の通信可能エリアC1、C2、C3、C4がすべて重複している領域では、4台の管理MFP1〜4によって別の機器の位置検出が可能となるので、より精度の高い位置計測が可能になる。
【0041】
以上のように3台以上の管理MFPを基準に測定した距離に基づいて新たな機器の位置を検出する場合、各管理MFPの位置情報および測定した距離を1つの装置に収集して三角測量法の演算を行う必要がある。ここでは、管理MFPと別体に設けた遠隔管理サーバに情報を収集して演算を行う第1方式の機器配置検出システムと、管理MFP間で情報交換し、いずれかの管理MFPが三角測量法に基づく演算を行う第2方式の機器配置検出システムを例示して説明する。
【0042】
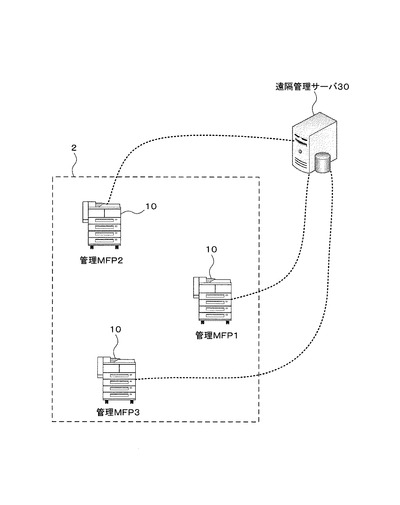
図5は、第1方式の機器配置検出システムの構成例を示している。この例では、1つの広いオフィス2内に、複数台の管理MFPが設置されており、各管理MFPは、管理センターなどに設置された遠隔管理サーバ30と、ネットワークなどを通じて通信可能に接続されている。
【0043】
図6は、MFP(管理MFPも同じ)の概略構成を示している。画像形成装置10(MFP)は、記録紙に画像を形成して出力する機能を備えたプリンタや複合機である。本例では、画像形成装置10は、原稿を光学的に読み取ってその複製画像を記録紙に印刷するコピージョブ、読み取った原稿の画像データをファイルにして保存したり外部端末へ送信したりするスキャンジョブ、パーソナルコンピュータなどの端末装置(以後、PCとも呼ぶ)から受信した印刷データに係る画像を記録紙上に形成して印刷出力する印刷ジョブなどのジョブを実行する機能を備えた複合機である。
【0044】
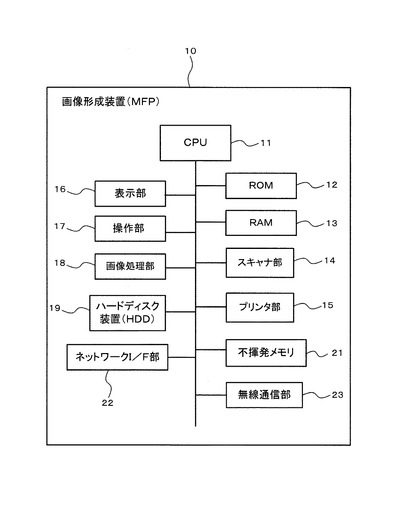
画像形成装置10は、当該画像形成装置10の動作を統括制御するCPU(Central Processing Unit)11と、このCPU11に接続されたROM(Read Only Memory)12と、RAM(Random Access Memory)13と、スキャナ部14と、プリンタ部15と、表示部16と、操作部17と、画像処理部18と、ハードディスク装置19と、不揮発メモリ21と、ネットワークI/F部22と、無線通信部23とを備えている。
【0045】
CPU11ではOSプログラムをベースとし、その上で、ミドルウェアやアプリケーションプログラムなどが実行される。ROM12には各種のプログラムが格納されており、これらのプログラムに従ってCPU11が処理を実行することでジョブの実行など画像形成装置10の各機能が実現される。RAM13はCPU11がプログラムを実行する際に各種のデータを一時的に格納するワークメモリや画像データを格納する画像メモリなどとして使用される。なお、その他の必要なプログラムはハードディスク装置19からRAM13にロードされて実行される。
【0046】
スキャナ部14は、原稿を光学的に読み取って画像データを取得する機能を果たす。スキャナ部14は、たとえば、原稿に光を照射する光源と、その反射光を受けて原稿を幅方向に1ライン分読み取るラインイメージセンサと、ライン単位の読取位置を原稿の長さ方向に順次移動させる移動手段(モータなどを含む)と、原稿からの反射光をラインイメージセンサに導いて結像させるレンズやミラーなどからなる光学経路、ラインイメージセンサの出力するアナログ画像信号をデジタルの画像データに変換する変換部などを備えて構成される。
【0047】
プリンタ部15は、画像データに応じた画像を記録紙上に形成して出力する機能を果たす。ここでは、記録紙の搬送装置と、感光体ドラムと、帯電装置と、レーザユニットと、現像装置と、転写装置と、分離装置と、クリーニング装置と、定着部とを有し、電子写真プロセスによって画像形成を行う、所謂、レーザープリンタとして構成されている。
【0048】
画像形成装置10の操作パネルは表示部16と操作部17を備えて構成される。表示部16は、液晶ディスプレイ(LCD…Liquid Crystal Display)などで構成され、各種の操作画面、設定画面などを表示する機能を果たす。操作部17は、ユーザからジョブの投入や設定など各種の操作を受け付ける機能を果たす。操作部17は、表示部16の画面上に設けられて押下された座標位置を検出するタッチパネルのほかテンキーや文字入力キー、スタートキーなどを備えて構成される。
【0049】
画像処理部18は、画像の拡大縮小、回転などの処理のほか、印刷データをイメージデータに変換するラスタライズ処理、画像データの圧縮、伸張処理などを行う。
【0050】
ハードディスク装置19は、大容量不揮発の記憶装置であり、プログラムのほか、たとえば、印刷データや画像データ、ジョブ履歴の保存などに使用される。不揮発メモリ21は、電源がオフされても記憶内容が破壊されないメモリ(フラッシュメモリ)であり、各種設定情報の保存などに使用される。
【0051】
ネットワークI/F部22は、LAN(Local Area Network)などのネットワークを通じてPCやその他の外部装置との間でデータを有線で通信する。無線通信部23は、他のMFPやプリンタなどの機器と無線で通信する機能を果たす。端末装置(PC)などとの通信に使用されてもよい。無線通信部23は、他の装置と無線通信したときの電波強度を計測する(もしくは電波強度から距離を求める)機能を備えている。
【0052】
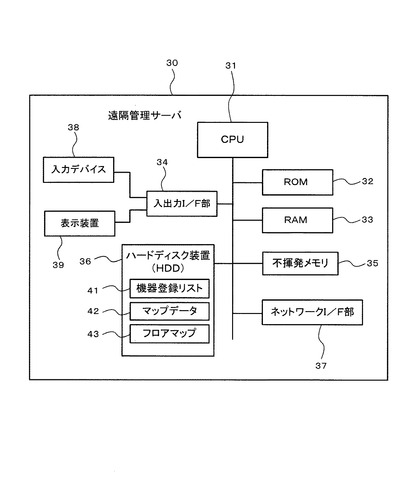
図7は、遠隔管理サーバ30の概略構成を示している。遠隔管理サーバ30は、CPU31と、ROM32と、RAM33と、入出力I/F部34と、不揮発メモリ35と、ハードディスク装置36と、ネットワークI/F部37とを備えている。さらに入出力I/F部34を介して、キーボードやマウスなどの入力デバイス38と、液晶ディスプレイなどの表示装置39が接続されている。
【0053】
ROM32には起動用のプログラムや固定データが記憶される。RAM33には、ハードディスク装置36からロードしたプログラムが記憶される。またRAM33は、CPU31がプログラムを実行する際に各種のデータを一時的に格納するワークメモリなどとして使用される。
【0054】
不揮発メモリ35は、電源をオフにしても記憶内容が破壊されないメモリ(フラッシュメモリ)である。ハードディスク装置36は、大容量不揮発の記憶装置であり、OSプログラムや画像形成装置10のドライバプログラム、ミドルウェア、各種アプリケーションプログラム、ファイル、データなどが保存される。ハードディスク装置36にはさらに、機器登録リスト41、マップデータ42、当該遠隔管理サーバ30で作成したフロアマップ43なども保存される。
【0055】
ネットワークI/F部37は、LANなどのネットワークを介して画像形成装置10(MFP、管理MFP)や他の外部装置と通信する機能を果たす。
【0056】
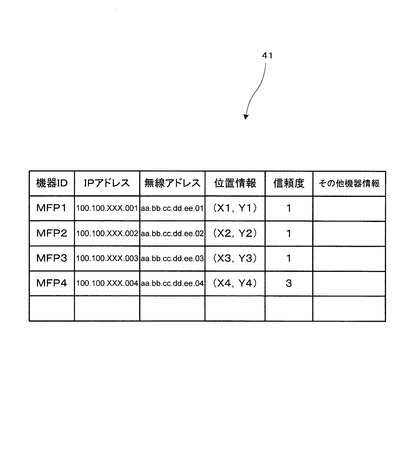
図8は、機器登録リスト41の一例を示している。機器登録リスト41には、位置の判明している機器(管理MFP)に関する各種の情報が登録される。図8に示す機器登録リスト41には、機器(管理MFP)の識別情報である機器IDに対応付けて、当該機器IDが示す管理MFPのIPアドレスと、無線アドレスと、位置情報と、信頼度と、その他の機器情報が登録される。無線アドレスは、無線通信でのアドレス(ここでは、Bluetoothデバイスアドレス)である。位置情報は、機器IDが示す管理MFPの設置位置を示す情報であり、ここでは、予め定めた位置を原点としたXY座標で表される。座標の単位は、cmなど、適宜に設定される。
【0057】
信頼度は、位置情報が示す位置の信頼性を示す情報である。その他の機器情報には、その機器(管理MFP)の機種名、機能、状態(たとえば、各給紙トレイの状態(用紙サイズや用紙の量など)、MFPがPCからジョブを受信可能か否か(ビジーか否か)など)が登録される。機器の状態を示す情報は、たとえば、各機器と遠隔管理サーバ30とが所定の周期で通信して収集し、更新するようにするとよい。
【0058】
各オフィス2(設置場所)において、少なくとも3台の管理MFPについては、たとえば、サービスマンが、基準点から巻尺で計る、あるいはGPS機器などで方位を測定する、などによって実測された位置情報が入力されて機器登録リスト41に登録される。このように実測された位置情報は、信頼性が高いので、信頼度1が登録される。なお、ここでは、信頼度は、数値が大きくなるほど位置情報が示す位置の信頼性が低いものとする。
【0059】
マップデータ42は、オフィス2の間取りや机の配置などを示すデータである。フロアマップ43は、マップデータ42上に管理MFPなど位置情報の判明している機器を示す図柄やマークを配置して示した図であり、機器の状態情報なども表示される。フロアマップ43は、遠隔管理サーバ30がマップデータ42や機器登録リスト41に基づいて作成する。フロアマップ43は、ハードディスク装置36に保存されるほか、遠隔管理サーバ30が表示装置39に表示したり、通信により管理MFPや他の外部端末などへ送信したりする。
【0060】
遠隔管理サーバ30は、新たな機器の位置検出を行う際に、機器登録リスト41に登録されている中の少なくとも3台の管理MFPを選択する。なお、遠隔管理サーバ30は、位置検出対象の機器と無線通信可能な管理MFPの中から少なくとも3台を選択する。そして、選択した管理MFPから、それぞれの管理MFPと位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る管理MFPの機器登録リスト41に登録されている位置情報とに基づいて、位置検出対象の機器の位置情報を導出する。そして、この位置情報を導出した機器を新たな管理MFPとして機器登録リスト41に追加登録するようになっている。すなわち、位置検出対象の機器(MFP)の機器IDやIPアドレス、無線アドレスなどをその機器と通信して(あるいは既存の管理MFPを介した通信で)入手し、これらと先ほど導出した位置情報とを対応付けて機器登録リスト41に追加登録する。
【0061】
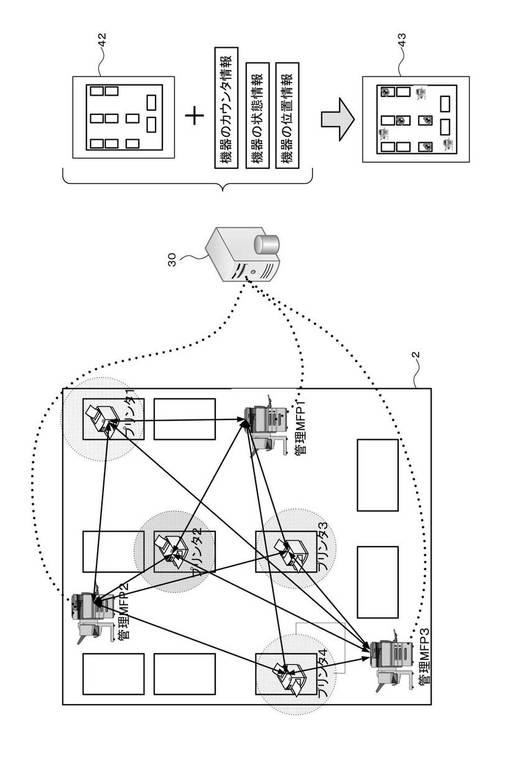
図9は、第1方式のシステム構成における機器配置検出システムのより具体的な設置例を示している。たとえば新たに設置されたプリンタ1の位置検出を行う場合、各管理MFP1〜3は、遠隔管理サーバ30にそれぞれプリンタ1と無線通信したときの電波強度データ(距離データ)を送付する。遠隔管理サーバ30はこれらの電波強度データ、および事前に設定された各管理MFP1〜3の位置情報(機器登録リスト41に登録されている)からプリンタ1の位置情報(絶対位置)を特定する。
【0062】
同様に管理MFP1、2、3からの距離を電波強度に基づいて測定することで、プリンタ2、プリンタ3、プリンタ4の位置情報も導出されて遠隔管理サーバ30に登録される。
【0063】
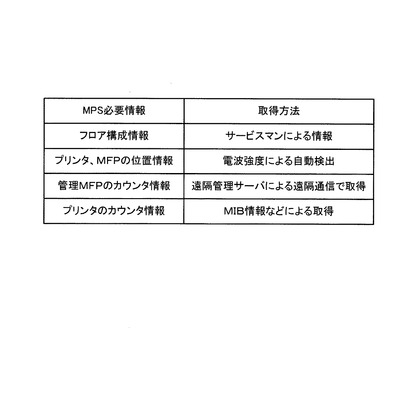
遠隔管理サーバ30は、管理MFP1〜3の位置情報、プリンタ1〜4の位置情報と、マップデータ42と、各機器から収集したカウンタ情報やその他の機器情報に基づいて、フロアマップ43を作成する。この方法は、主にサービスマンなどがMPS(Managed Print Service)用フロアマップを作成する際に使用する方法である。フロア上のプリンタの位置情報は遠隔管理サーバ30にて集計され、さらに図10に示すような、付加情報を追加することで、より具体的なフロアマップが生成される。
【0064】
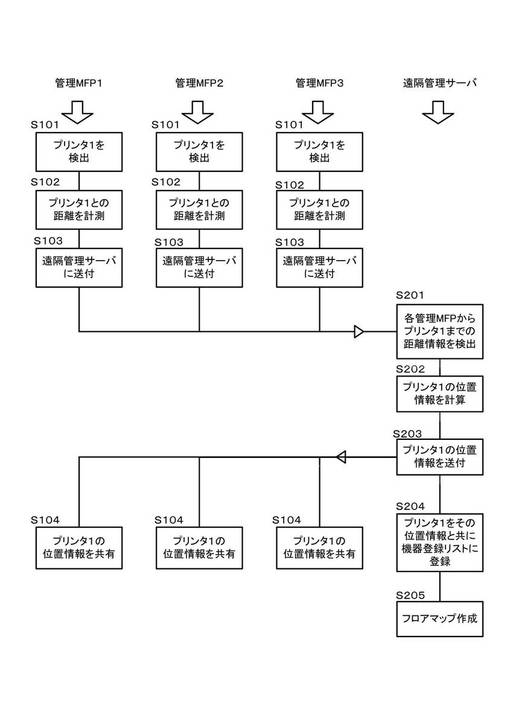
図11は、図9の構成において、プリンタ1の位置検出を行う場合における本システムの動作シーケンスを示している。各管理MFP1〜3は、プリンタ1を検出すると(ステップS101)、プリンタ1との距離を電波強度に基づいて計測し(ステップS102)、その計測した距離を示す距離情報を遠隔管理サーバ30にそれぞれ送信する(ステップS103)。なお、各管理MFPが電波強度を遠隔管理サーバ30に送信し、遠隔管理サーバ30がその電波強度を距離に換算するように構成されてもよい。
【0065】
遠隔管理サーバ30は、各管理MFP1〜3から距離情報を受信・検出し(ステップS201)、これらの距離情報と、機器登録リスト41に登録してある管理MFP1〜3の位置情報に基づいて、プリンタ1の位置(位置情報)を計算で求める(ステップS202)。そして、プリンタ1の位置情報を各管理MFP1〜3に送信する(ステップS203)。これを受信した各管理MFP1〜3は、自装置内の管理テーブルにプリンタ1の位置情報を登録する(ステップS104)。なお、各管理MFPは、同じフロア内のすべての管理MFPやプリンタの位置情報および機器情報を自装置内の管理テーブルに登録して、そのフロア内の設置機器に関する情報を共有するようになっている。たとえば、機器登録リスト41と同様の内容が各管理MFPの管理テーブルに登録される。
【0066】
遠隔管理サーバ30は、プリンタ1をその位置情報と共に機器登録リスト41に追加登録する(ステップS204)。プリンタ1のIPアドレスや無線アドレスなども管理MFPから入手して登録される。その後、遠隔管理サーバ30は、管理者などからの要求に応じてフロアマップ43を作成する(ステップS205)。
【0067】
次に、管理MFPが情報を集計して位置情報を導出する第2方式による機器配置検出システムについて説明する。
【0068】
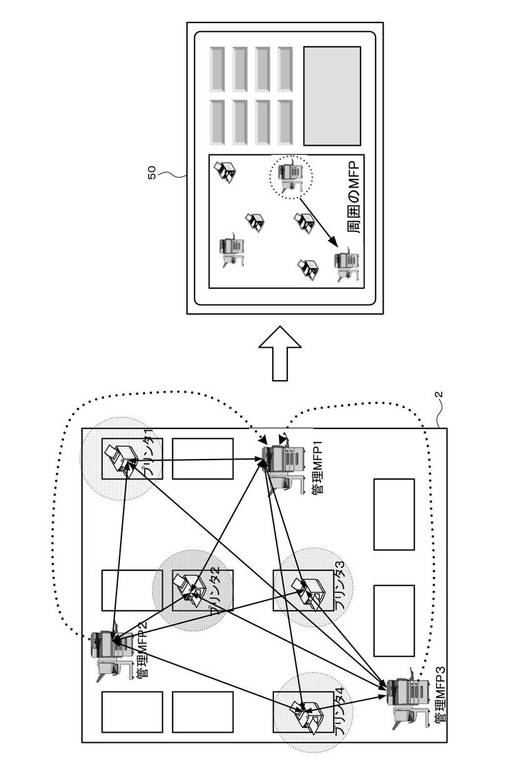
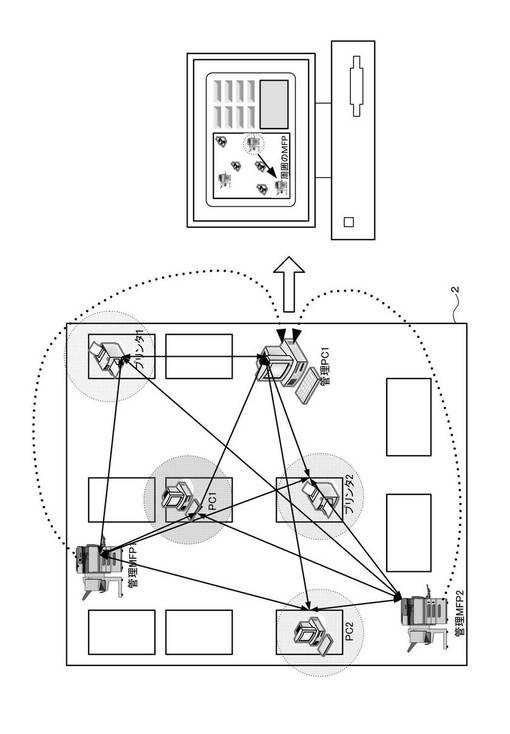
第2方式による機器配置検出システムでは、管理MFP自体が情報の集計を行うので、図12に示すように、たとえば、管理MFP1のユーザは、管理MFP1の操作パネル50上で、周辺のMFPやプリンタの位置を閲覧・確認して各種の操作を行うことが可能になる。
【0069】
たとえば、あるジョブを別のMFPに転送して印刷させる場合は、転送先のMFPを選択する必要があり、従来はプリンタ名称やIPアドレスを操作パネル上で指定することで転送先を指定していた。しかし、第2方式の機器配置検出システムの管理MFPでは、新設された機器の位置情報が自動的に検出されて登録されるので、事前に位置情報を手動で登録することなく、周囲のMFPやプリンタの位置情報を操作パネル上に表示することができ、操作性が向上する。
【0070】
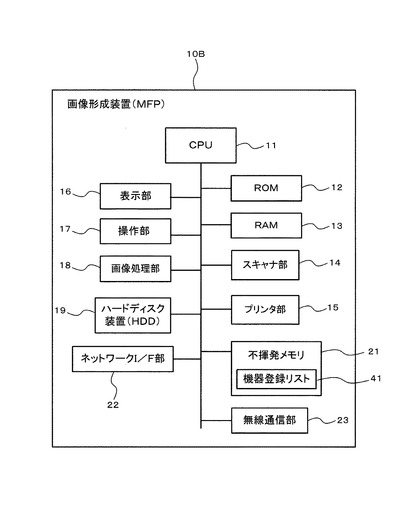
図13は、第2方式による機器配置検出システムにおける画像形成装置10B(管理MFP)の構成例を示している。図6に示した第1方式の画像形成装置10と同一部分には同一の符号を付してそれらの説明は省略する。第2方式では、不揮発メモリ21内に、図8の機器登録リスト41と同様のものが作成されて記憶される。ただし、第2方式の機器登録リスト41には、どの管理MFPが自装置であるかを示す情報が登録される。
【0071】
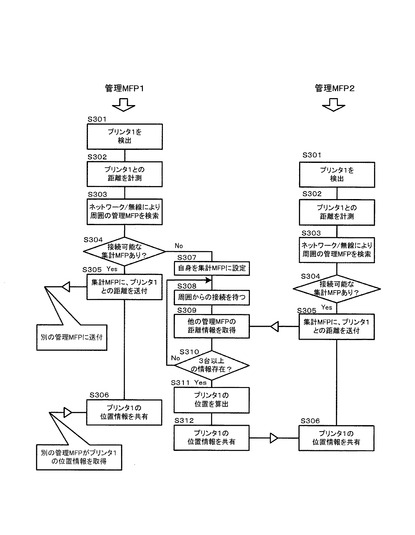
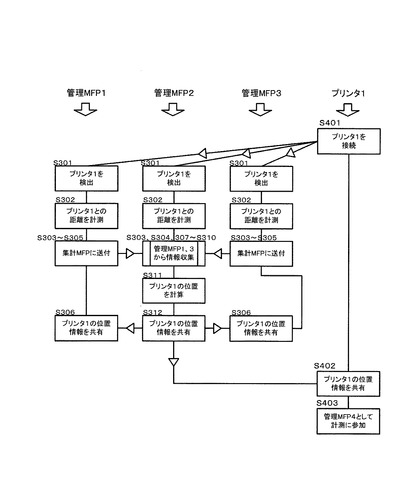
図14は、第2方式の機器配置検出システムにおける管理MFPが、プリンタ1の位置検出を行う場合の動作シーケンスを示している。ここでは、プリンタ1を検出した管理MFPの中のいずれか1台(最初に集計MFPになることを宣言した管理MFP)が集計MFPとなり、集計MFPに他の管理MFPからの情報を集計し、集計MFPがプリンタ1の位置を算出するようになっている。そして、算出したプリンタ1の位置情報を他の全ての管理MFPに送信して情報を共有するようになっている。
【0072】
管理MFPは、プリンタ1を検出すると(ステップS301)、プリンタ1との距離を電波強度に基づいて計測する(ステップS302)。次に、周囲の管理MFPを検索し(ステップS303)、すでに集計MFPになることを宣言している他の管理MFPが存在するか否かを調べる(ステップS304)。
【0073】
集計MFPが既に存在する場合は(ステップS304;Yes)、その集計MFPに対してプリンタ1までの距離と自装置の位置情報とを送信する(ステップS305)。なお、送信先の集計MFPの機器登録リスト41には既に自装置の位置情報が登録されているので、位置情報に代えて、自装置の識別情報(たとえばIPアドレスや、機器ID)を送信してもよい。
【0074】
集計MFPが存在しない場合は(ステップS304;No)、自装置を集計MFPに設定する(ステップS307)。そして、周囲の他の管理MFPからの接続を待つ(ステップS308)。他の管理MFPから接続があると、その管理MFPから距離情報と位置情報を受信して取得する(ステップS309)。自装置を含めて、3台以上の管理MFPが計測した距離とその管理MFPの位置情報が集計されるまで(ステップS310;No)、ステップS308〜S310の処理を繰り返し行い、3台分以上集計できたら(ステップS310;Yes)、その集計した情報に基づいてプリンタ1の位置情報を算出する(ステップS311)。算出したプリンタ1の位置情報を自装置の機器登録リスト41に登録すると共に、他の全ての管理MFPおよびプリンタ1に送信して情報を共有する(ステップS312)。
【0075】
他の管理MFPにおいては、集計MFPからプリンタ1の位置情報を受信し、これを自装置の機器登録リスト41に登録して情報共有する(ステップS306)。
【0076】
図15は、図14の処理によって、位置検出されたプリンタ1が、管理MFPの1つに加わるように変遷する動作シーケンスを示している。図14と同一の処理には同一のステップ番号を付してある。プリンタ1を接続すると(ステップS401)、管理MFP1〜3がプリンタ1を検出し、図14で説明した動作を行って、プリンタ1の位置情報を導出する。この例では、管理MFP2が集計MFPとなっている。
【0077】
プリンタ1は、集計MFP2から通知された情報を受信し、これを自装置の機器登録リスト41に登録する(ステップS402)。なお、集計MFP2は、プリンタ1の位置情報だけでなく、集計MFP2が保有している機器登録リスト41全体(プリンタ1登録済みのもの)をプリンタ1に送信し、その情報全部を共有するようになっている。
【0078】
プリンタ1は機器登録リスト41を共有することで、新たな管理MFPとなり(ここでは、管理MFP4になり)、以後、別の機器の位置検出において管理MFPの1つとして参加するようになる(ステップS403)。
【0079】
次に、信頼度について説明する。
【0080】
以下に説明する信頼度およびその利用方法は第1、第2方式の機器配置検出システムに共通である。
【0081】
距離計測に使用可能な管理MFPが3台以上存在する場合、各管理MFPの位置情報の精度(信頼性)を示す信頼度情報を利用することで、もっとも適切な管理MFPを選択して新たな機器の位置情報を検出でき、検出する位置情報の精度向上を図ることができる。
【0082】
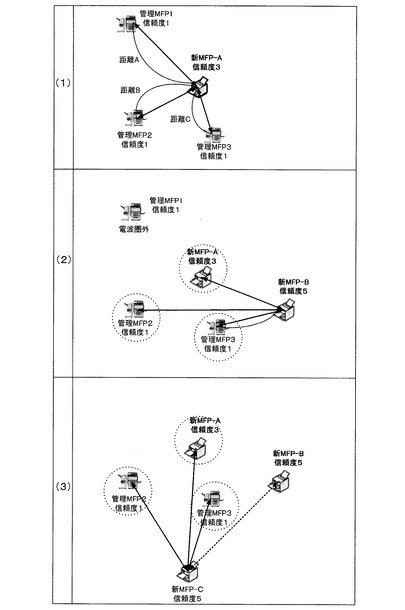
以下にその具体例を図16に基づいて説明する。位置検出において、少なくとも3台の管理MFPの位置情報は既知であることが必要なので、システムを構築した最初の段階では、たとえば、管理MFP1、2、3について、手動で位置情報の設定を行う。この位置情報は、GPSなどを使用した高精度の情報であり、もっとも精度(信頼性)が高く、信頼度1を付与する。
【0083】
次に、これらの管理MFP1〜3を基準にして新たな機器(新MFP-Aとする)の位置を検出した場合、新MFP-Aの位置情報は、誤差を含む測定値であるため、管理MFP1〜3の位置情報に比べて精度(信頼性)が低い。そこで、この新MFP-Aの位置情報に与える信頼度は、管理MFP1〜3の位置情報より信頼性の低い値にする。ここでは、信頼度は数値が大きいほど、信頼性は低く、位置検出の基準にした管理MFP1〜3の信頼度の合計値を、新MFP-Aの信頼度とする。したがって、新MFP-Aの信頼度は「3」になる(図16(1))。
【0084】
次に、新たに新MFP-Bが追加されたものとする(図16(2))。新MFP-Bは管理MFP1の通信可能エリア外(圏外)なので、新MFP-Bの位置検出は、MFP2、MFP3、新MFP-Aの3台を基準に行われる。
【0085】
この場合、新MFP-Aの位置情報を使用するため、新MFP-Aよりも信頼性は低くなる。ここでは、位置検出の基準にした管理MFPの信頼度の合計値を、その検出された位置情報の信頼度とするので、新MFP-Bの信頼度は、MFP2、MFP3、新MFP-Aの各信頼度の合計値の「5」となる。
【0086】
さらに、別の新MFP-Cが追加された場合(図16(3))、この新MFP-Cの位置検出には、管理MFP2、3、新MFP-A、新MFP-Bの4台を使用することができる。この際には、信頼性の高いもの(信頼度の数値が小さいもの)を優先して基準となる3台のMFPを選択することで、より精度の高い位置検出が可能になる。図16(3)の場合、信頼度「1」の管理MFP2、3、と信頼度「3」の新MFP-Aを選択することで、新MFP-Cの位置情報を信頼度「5」の信頼性で求めることができる。
【0087】
仮に、管理MFP2、3と信頼度「5」の新MFP-Bを使用すると、新MFP-Cの位置情報は信頼度「7」になる。管理MFP3と信頼度「3」の新MFP-Aと、信頼度「5」の新MFP-Bを使用すると、新MFP-Cの位置情報は信頼度「9」になる。
【0088】
遠隔管理サーバ30や集計MFPは、新たな機器の位置を検出したとき、上記の演算を行って、その検出した位置情報の信頼度を算出し、これを位置情報と共に機器登録リスト41に登録する、あるいは他の管理MFP、プリンタと共有するようになっている。
【0089】
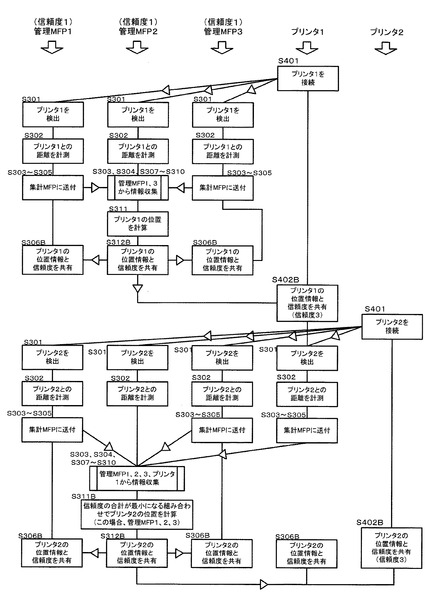
図17は、信頼度に基づいて、位置検出に使用する管理MFPを選択する場合の動作のシーケンスの一例を示している。図14、図17と同一の処理には同一のステップ番号を付してある。管理MFP1〜3はそれぞれ信頼度1とする。これら管理MFP1〜3を基準に計測した距離情報を収集した集計MFP2は、新規に接続されたプリンタ1の位置情報を導出する。プリンタ1の信頼度は、管理MFP1〜3の信頼度の合計値である「3」になる。プリンタ1の位置情報および信頼度は、全ての管理MFPおよびプリンタ1に配信されて共有される(ステップS306B、S312B、402B)。これにより、プリンタ1も管理MFPの1つに加えられる。
【0090】
その後、管理MFP1〜3とプリンタ1の4台を管理MFPとして使用可能な状態で新規にプリンタ2が接続されると、集計MFP2はこれら4台の管理MFPの中から信頼度に基づいて3台を選択して、プリンタ2の位置情報を導出する(ステップS311B)。すなわち、信頼度の合計が最小になる3台の組み合わせとして、管理MFP1〜3を選択し、これらにより、プリンタ2の位置情報を導出する。プリンタ2の信頼度は、管理MFP1〜3の信頼度の合計値である「3」になる。プリンタ2の位置情報および信頼度は、全ての管理MFP1から3およびプリンタ1、2に配信されて共有される(ステップS306B,S312B、402B)。これにより、プリンタ2も管理MFPの1つに加えられる。
【0091】
次に、信頼度の変形例について説明する。
【0092】
信頼度は、新たに検出する位置情報の信頼性を左右する要素と考えられる。該要素は、検出の基準となる位置情報の信頼性に限定されるものではなく、たとえば、基準となる管理MFPと位置検出対象の機器との距離の大小にも依存する。すなわち、位置検出対象の機器に近い管理MFPを使用するほど、電波強度による距離の測定精度は高まる。
【0093】
そこで、基準となる管理MFPの位置情報の信頼度に対して、その管理MFPと位置検出対象の機器との距離に応じた重み付けを行い、重み付け後の信頼度の合計が最小となる管理MFPの組み合わせを選択するようにしてもよい。位置検出された機器の位置情報に与える信頼度は、重み付け後の信頼度の合計値とすればよい。
【0094】
たとえば、管理MFPと機器との距離Lが5>L≧0mの場合、重み計数αは1.0、7>L≧5mの場合、重み計数αは1.2、9>L≧7mの場合、重み計数αは1.4、11>L≧9mの場合、重み計数αは1.6、L≧11mの場合、重み計数αは2.0のように定めておく。そして、管理MFP1〜3の位置情報の信頼度をF1、F2、F3、各管理MFPと機器との距離に対応する重み計数をα1、α2、α3とすると、これらを使用して求めた位置情報の信頼度FnはFn=、F1×α1+F2×α2+F3×α3、のように求める。
【0095】
なお、信頼度が高いものを利用するか、信頼度が低いものを含むがより多くの管理MFPを基準にして位置検出を行うかを、選択可能(設定変更可能)に構成してもよい。
【0096】
このほか、基準となる3台と、位置検出対象の機器との位置関係なども信頼度を定める要素としてもよい。たとえば、位置検出対象の機器が3台を頂点とする三角形の内側になるか、外側になるか、位置検出対象の機器と基準となる各管理MFPとを結ぶ3本の直線の角度が、なるべく120度に近い角度で相違する、すなわち、3台の管理MFPが位置検出対象の機器から同じような方角にあるのではなく、方位的にも分散しているか否かなどを、信頼度を定める要素にしてもよい。
【0097】
次に、位置検出対象のプリンタの位置検出に使用可能な管理MFPが4台以上存在する場合に、3台の組み合わせ毎に位置情報を導出して精度を高める方法について説明する。
【0098】
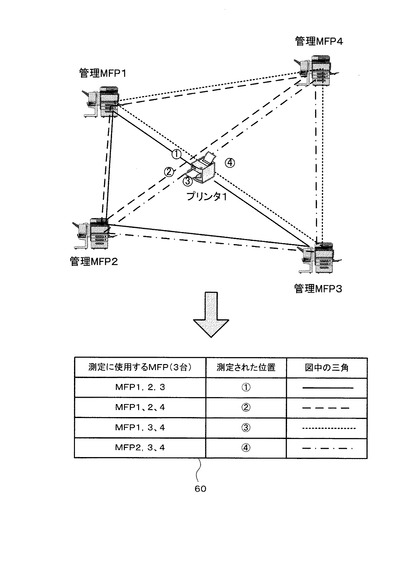
ここでは、位置検出対象のプリンタの位置検出に使用可能な管理MFPが4台以上存在する場合に、3台の組み合わせを複数組作成し、それぞれの組で位置検出対象のプリンタの位置情報を導出し、その中から精度不良のものを除外して、最終的な位置(位置情報)を求める。
【0099】
図18に示すように、位置検出対象のプリンタ1を測定する管理MFPが4台ある場合、測定に使用する3台の管理MFPの組み合わせは、同図の表60に示すように、4組(パターン)存在する。また、3台の管理MFPの組にてそれぞれ測定されたプリンタ1の位置を、同図上段の配置図中の1から4の番号を付した円印で示す(本文中では、測定位置1〜4とする)。
【0100】
各測定位置1〜4には、電波の状況などにより、精度が低いものが含まれている場合がある。特に管理MFPとプリンタ1との間に壁などの遮蔽物が存在する場合には、精度が著しく落ちてしまう。そこで、より高い精度で位置測定を行うために、精度の低いと思われる測定位置を除外する。除外方法には、以下の除外法1、除外法2などがある。
【0101】
<除外法1> 図19(a)に示すように、測定位置1〜4の各座標から、その中心位置Aを求める。この中心位置Aの座標から各測定位置1〜4までの距離を計算し、中心位置Aから最も遠い測定位置(ここでは、測定位置4)を除外する。そして、残りの測定位置1〜3の中心位置A2を求め、これを最終的なプリンタ1の測定位置に決定する(同図(b))。このように、精度不良の測定位置を除外し、残りの複数の測定位置から位置検出対象の最終的な位置情報を決定することで、精度が向上する。
【0102】
<除外法2> 各測定位置の中心位置Aから一定比率以上離れているものを除外する。すなわち、中心位置Aと測定位置との距離が、中心位置Aと各測定位置との距離の平均値に対して、一定以上の比率となるものを除外する。たとえば、距離が、平均距離の2倍あるいは3倍以上のものは除外する。測定位置の偏差や標準偏差を求め、偏差あるいは偏差値が規定値以上となる測定位置を除外する、という除外法などでもよい。このように、精度不良の測定位置を除外し、残りの複数の測定位置から位置検出対象の最終的な位置情報を決定することで、精度が向上する。
【0103】
図20は、プリンタ1の位置を管理MFP1〜4に対して除外法を適用して求める場合の動作シーケンスを示している。集計MFPは管理MFP2とする。図14と同一の処理には同一のステップ番号を付してある。
【0104】
集計管理MFP2は、管理MFP1〜4から収集した位置情報に基づき、(1)管理MFP1、2、3、(2)管理MFP1、2、4、(3)管理MFP1、3、4、(4)管理MFP2、3、4、の4組を設定し、それぞれの組により、プリンタ1の位置を計測する(ステップS341)。次に、ステップS341で求めた複数の測定位置の中心位置を求める(ステップS342)。そして、除外法1、または除外法2により、精度不良の測定位置を取り除く(ステップS343またはS344)。ここでは、(1)組に対応する測定位置1が精度不良であったとする。
【0105】
精度不良のものを除く複数の測定位置(ここでは、(2)、(3)、(4)の各組の測定位置2、3、4)からプリンタ1の位置を算出(測定位置2、3、4の中心位置を算出)し(ステップS345)、これをプリンタ1の最終的な位置に確定する(ステップS346)。
【0106】
なお、上記の除外法と、前述した信頼度に基づく方法とを組み合わせてもよい。たとえば、位置検出対象の測定に使用可能な管理MFPが多数存在する場合、3台ずつの組み合わせを、信頼度が小さくなる順で上位から複数組選択し、これら複数組のそれぞれで位置検出対象の位置(測定位置)を求め、それらの中から精度不良のものを上記除外法によって除外し、精度不良を除いた複数の測定位置から最終的な位置を決定する、というようにすれば、効率的にかつより高い精度で、位置検出対象の位置を求めることができる。特に5台以上の管理MFPを利用可能な場合、3台の選択方法が多数あるので、信頼度と除外法を併用することで、効率的にかつ高い精度で位置情報を検出することができる。
【0107】
次に、無線通信機能を備えた端末装置(PC)の位置を、管理MFPによって測定する場合について説明する。
【0108】
近年では、BlueToothなどの無線機能を持つPCも増えており、管理MFPからの電波測定により、PCの位置測定も可能となる。また、MFPをPCから利用するためには、通常、そのMFP用のプリンタドライバなどのユーティリティをPCにインストールして利用するため、このユーティリティに管理MFPと共同して位置測定する機能や、位置測定に関する管理MFPと同様の機能を搭載することで、たとえば、図21に示すように、PCを、集計MFP(あるいは遠隔管理サーバ30)として機能させて、新たな機器の位置測定を行ったり、フロアマップをディスプレイに表示したりすることができる。
【0109】
以上、本発明の実施の形態を図面によって説明してきたが、具体的な構成は実施の形態に示したものに限られるものではなく、本発明の要旨を逸脱しない範囲における変更や追加があっても本発明に含まれる。
【0110】
実施の形態では、信頼度や除外法に関する例を第2方式の機器配置検出システムによって説明したが、信頼度や除外法は、遠隔管理サーバ30を使用する第1方式の機器配置検出システムにおいても同様に適用することができる。第2方式では、全ての管理MFPに、全ての管理MFPが登録された機器登録リスト41を記憶するようにしたが、個々の管理MFPは、自装置の位置情報(信頼度を使用する場合はさらに信頼度)のみを記憶する構成でもよい。この構成では、第1方式で遠隔管理サーバ30が記憶していた機器登録リスト41は各管理MFPに分散して記憶されていることになる。集約MFPが新たな機器の位置を計算する際に、各管理MFPの位置情報やその管理MFPから位置検出対象の機器までの距離を収集するようにすればよい。そして、算出した位置検出対象の機器の位置情報をその機器に登録することで、追加登録が行われる。
【0111】
信頼度の決定方法は実施の形態に例示したものに限定されない。位置情報の導出された機器の位置情報の信頼度が、その導出に使用された機器(基準となる機器)の位置情報の信頼度より低くなるようにすればよい。すなわち、導出した位置情報に付与する信頼度は、位置情報の導出に使用された機器の位置情報の信頼度に基づいて、それより低くなるように決定されればよい。
【0112】
第2方式の機器配置検出システムにおいても、遠隔管理サーバ30と同様にフロアマップ43を作成するように構成されてもよい。たとえば、各管理MFPあるいは特定の管理MFPにマップデータ42を登録しておき、管理MFPのCPU11が、このマップデータ42と各機器の位置情報とから、機器の図柄などをマップデータが示す地図(見取り図)上に表示したフロアマップ43を生成するようにすればよい。フロアマップ43はMFPの操作パネルに表示してもよい。また、第2方式においても、フロアマップ43上に各機器の状態を収集して表示するよう構成してもよい。
【0113】
電波強度に基づく距離の算出は、通信強度を段階的に変化させてMFP−PC間の距離を求める方法のほか、たとえば、信号対ノイズ比など通信品質を示す情報から距離を求めるようにしてもよく、既知の任意の方法でよい。
【0114】
実施の形態では画像形成装置10が複合機の場合を例に説明したが、端末装置から何らかのジョブを受信して実行する装置であればよく、ネットワーク接続可能なプリンタなどでもかまわない。
【符号の説明】
【0115】
2…オフィス
10…画像形成装置(MFP)
11…CPU
12…ROM
13…RAM
14…スキャナ部
15…プリンタ部
16…表示部
17…操作部
18…画像処理部
19…ハードディスク装置(HDD)
21…不揮発メモリ
22…ネットワークI/F部
23…無線通信部
30…遠隔管理サーバ
31…CPU
32…ROM
33…RAM
34…入出力I/F部
35…不揮発メモリ
36…ハードディスク装置
37…ネットワークI/F部
38…入力デバイス
39…表示装置
41…機器登録リスト
42…マップデータ
43…フロアマップ
50…操作パネル
60…4台から作成された3台の管理MFPの組を示す一覧表
A…MFP1とプリンタ1との距離
B…MFP2とプリンタ1との距離
C…MFP3とプリンタ1との距離
C1…管理MFP1の通信可能エリア
C2…管理MFP2の通信可能エリア
C3…管理MFP3の通信可能エリア
E1…C1、C2、C3が全て重複する領域
E2…MFP4が管理MFPの1つに加わることで拡張された領域
【技術分野】
【0001】
本発明は、オフィスなどでプリンタや複合機などの機器の設置位置を検出する機器配置検出システム、機器配置検出方法、および別の機器の配置検出機能を有する機器に関する。
【背景技術】
【0002】
オフィスなどにおいては、プリンタや複合機などの機器を複数台配置し、これらをネットワーク上の多くのPC(パーソナルコンピュータ)で共有するシステム環境が多くあり、このような環境では、機器のレイアウトマップを作成して、配置が適切か否かを評価するといったことが行われる。
【0003】
レイアウトマップの作成技術としては、たとえば、構内無線LAN(Local Area Network)システムにおいて、位置情報が事前に分かっている固定された3つのアクセスポイントのそれぞれから、位置検出対象の機器と無線通信し、そのときの電波強度に基づいて各アクセスポイントからの距離を測定し、三角測量により機器の位置情報を求めてレイアウトマップの作製をするシステムがある(特許文献1、図18、21参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−49538号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示のシステムでは、電波強度の測定は、機器と、固定的に設置された位置情報が既知の3つのアクセスポイントとの間で行うので、位置検出対象の機器は、3つのアクセスポイント全部から電波が届く範囲内にある必要があり、測定可能エリアが限られたものになっていた。
【0006】
また、位置検出対象の機器との距離の測定に利用可能なアクセスポイントは限られてしまうので、そのアクセスポイントと位置検出対象の機器との間のフロア上に電波を遮る障害物などがあると、電波強度の測定精度が下がり、位置の検出精度が著しく悪化してしまう、という問題もあった。
【0007】
本発明は、上記の問題を解決しようとするものであり、新たな機器の位置を測定することで、測定可能エリアを拡張したり、測定精度を向上させたりすることのできる機器配置検出システム、機器配置検出方法、および機器を提供することを目的としている。
【課題を解決するための手段】
【0008】
かかる目的を達成するための本発明の要旨とするところは、次の各項の発明に存する。
【0009】
[1]無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部と、
無線通信機能を備えた位置検出対象の機器と前記機器登録部に登録されている中の少なくとも3台の機器のそれぞれとの間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した前記位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録する機器追加登録部と、
を有する
ことを特徴とする機器配置検出システム。
【0010】
上記発明では、機器登録部には、位置情報が既知の少なくとも3台の機器が登録されており、該登録されている中の少なくとも3台の機器と、位置検出対象の機器との間で無線通信したときの電波強度から、位置が既知の各機器と位置検出対象の機器との距離を求め、これらの距離と位置が既知の各機器の位置情報とから、三角測量法などにより、位置検出対象の機器の位置情報を求める。そして、この位置情報の導出された機器を、機器登録部に追加登録する。すなわち、追加登録した機器は、別の機器の位置を検出する際には、位置が既知の機器の1つとなり、測定範囲の拡張や測定精度の向上に貢献する。
【0011】
[2]前記位置検出部は、前記機器登録部に登録されている機器の中から前記位置検出対象の機器の位置情報の導出に使用する前記少なくとも3台の機器を、導出する位置情報の精度が高まるものを優先して、選定する
ことを特徴とする[1]に記載の機器配置検出システム。
【0012】
上記発明では、機器登録部に登録されている機器の中から位置情報の導出に使用する機器を選択する際に、導出される位置情報の精度が高まるように、選択する。たとえば、機器登録部に登録されている位置情報の精度が高いものを使用するほど、その位置情報を基準にして導出される位置情報の精度は高まる。また、位置検出対象の機器との距離が短いほど、電波強度による距離の測定精度は高まる。これら精度に寄与する1または複数の要素を勘案して、位置精度が高まるように、測定の基準となる機器を選択する。
【0013】
[3]前記機器登録部に登録された位置情報には、その位置情報の信頼性を示す信頼度が付与されており、
前記位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて、信頼度決定部が決定し、
前記位置検出部は、信頼性の高い位置情報を優先して、前記選定を行う
ことを特徴とする[2]に記載の機器配置検出システム。
【0014】
上記発明では、機器登録部に登録されている各位置情報にはその位置情報の信頼性(精度)を示す信頼度が付与されている。また、位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて決定される。すなわち、導出された位置情報の信頼度は、その導出の基準となった機器の位置情報より信頼性の低い値にする。そして、測定の基準となる機器を選択する場合、信頼性の高いものを優先する。これにより、導出される位置情報の精度を高めることができる。
【0015】
[4]前記位置検出部は、前記導出に使用する少なくとも3台の機器の組み合わせを複数組設定し、組毎に、前記位置検出対象の機器の位置情報を導出し、これら複数の位置情報に基づいて、前記位置検出対象の機器に対する最終的な位置情報を導出する
ことを特徴とする[1]に記載の機器配置検出システム。
【0016】
上記発明では、導出の基準となる3台の機器の組み合わせを複数組設定可能な場合には、組毎に位置情報を導出し、これら複数の位置情報に基づいて位置検出対象の機器に対する最終的な位置情報を導出する。たとえば、複数の位置情報に対して中央値、平均値、偏差など統計的手法を適用することで、より精度良く、位置情報を導出することができる。
【0017】
[5]前記組毎に導出した複数の位置情報の中から精度不良の位置情報を除外した位置情報に基づいて、前記最終的な位置情報を導出する
ことを特徴とする[4]に記載の機器配置検出システム。
【0018】
上記発明では、精度不良の測定位置は除外して、最終的な位置情報を決定する。
【0019】
[6]前記位置検出部で求めた前記位置検出対象の機器の位置情報を、前記機器登録部に登録されている機器に送信する送信部を有する
ことを特徴とする[1]乃至[5]のいずれか1つに記載の機器配置検出システム。
【0020】
上記発明では、導出した位置検出対象の機器の位置情報が各機器で共有される。
【0021】
[7]前記機器登録部に登録されている情報に基づいて、前記機器登録部に登録されている機器の配置レイアウトマップを作成するマップ作成部を備え、
前記マップ作成部が作成した配置レイアウトマップを所定の表示部に表示させる
ことを特徴とする[1]乃至[6]のいずれか1つに記載の機器配置検出システム。
【0022】
上記発明では、機器の位置が示された配置レイアウトマップが作成されて表示される。
【0023】
[8]機器の状態情報を取得する機器状態取得部を有し、
前記マップ作成部は、前記機器状態取得部が取得した状態情報に基づいて、前記配置レイアウトマップ内に機器の状態を表示する
ことを特徴とする[7]に記載の機器配置検出システム。
【0024】
上記発明では、配置レイアウトマップ内に各機器の状態情報が表示される。たとえば、各機器がビジーであるか否か、各機器の給紙トレイの状態(紙の有無や、残量、サイズなど)などが表示される。この表示は、使用する機器をユーザが選択する際の補助情報となる。
【0025】
[9]情報処理装置が、無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部の中の少なくとも3台の機器のそれぞれと無線通信機能を備えた位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出するステップと、
情報処理装置が、前記ステップで導出した位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録するステップと、
を有する
ことを特徴とする機器配置検出方法。
【0026】
[10]無線通信部と、
位置情報が既知の他の機器から該機器の位置情報と該機器が位置検出対象の機器と無線通信したときの信号強度とを取得する取得部と、
自装置の位置情報と、前記無線通信部で前記位置検出対象の機器と無線通信したときの信号強度と、前記取得部によって少なくとも2台の他の機器から取得した位置情報および信号強度とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した位置情報を前記位置検出対象の機器に送信する送信部と、
を備え、
前記位置検出部が位置情報を導出した前記機器を、位置情報が既知の他の機器の1つに加えて、別の機器の位置情報を導出する
ことを特徴とする機器。
【発明の効果】
【0027】
本発明に係る機器配置検出システム、機器配置検出方法、および機器によれば、新たな機器の位置を測定することで、測定可能エリアが自動的に拡張され、また測定精度を向上させることができる。
【図面の簡単な説明】
【0028】
【図1】電波強度による距離測定の概念を示す説明図である。
【図2】3台の管理MFPで新たな機器の位置を導出する際の概念を示す説明図である。
【図3】位置情報の導出された機器を管理MFPに追加する概念を示す説明図である。
【図4】管理MFPの追加により位置検出可能な範囲が拡張される様子を示す説明図である。
【図5】第1方式の機器配置検出システムのシステム構成例を示す説明図である。
【図6】第1方式の機器配置検出システムの画像形成装置(MFP)の概略構成を示すブロック図である。
【図7】遠隔管理サーバの概略構成を示すブロック図である。
【図8】機器登録リストを示す説明図である。
【図9】第1方式の機器配置検出システムの設置例を示す説明図である。
【図10】MPSに必要な情報とその取得方法を示す一覧表である。
【図11】図9の構成において、プリンタ1の位置検出を行う場合における第1方式の機器配置検出システムの動作シーケンスを示すシーケンス図である。
【図12】第2方式による機器配置検出システムのシステム構成例と利用形態を示す説明図である。
【図13】第2方式による機器配置検出システムの画像形成装置(MFP)の概略構成を示すブロック図である。
【図14】第2方式による機器配置検出システムの画像形成装置(MFP)の動作を示す流れ図である。
【図15】図14の処理によって、位置検出されたプリンタ1が、管理MFPの1つに参加するように変遷する動作シーケンスを示すシーケンス図である。
【図16】信頼度に関する説明図である。
【図17】信頼度に基づいて、位置検出に使用する管理MFPを選択する場合の動作のシーケンスの一例を示すシーケンス図である。
【図18】4台の管理MFPから3台の組み合わせを4組設定する場合を示す説明図である。
【図19】精度不良の測定位置を除去して位置決定する様子を示す説明図である。
【図20】プリンタ1の位置を管理MFP1〜4に対して除外法を適用して求める場合の動作シーケンスを示すシーケンス図である。
【図21】本発明をPCに適用した場合の構成例を示す説明図である。
【発明を実施するための形態】
【0029】
以下、図面に基づき本発明の実施の形態を説明する。
【0030】
まず、本発明における電波強度を利用した測定について説明する。
【0031】
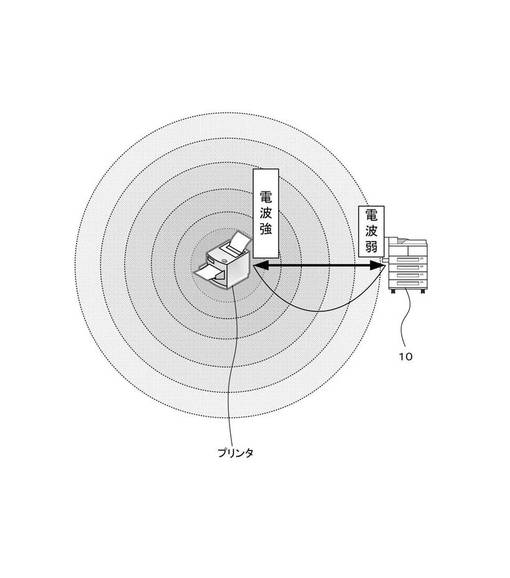
図1は、2つの機器間(プリンタと画像形成装置10との間)で無線通信を行った場合の電波強度と、機器間の距離との関係を示している。電波強度は、利用する周波数帯などにより減衰特性は異なるものの、発信元からの距離が離れるにつれて減衰する。つまり、距離が遠くになるにつれ、電波強度も弱くなる。電波強度は、無線通信機能を有する機器で測定可能なので、この機能を利用して機器間のおおよその距離を測定することができる。
【0032】
たとえば、近年のプリンタには、Bluetooth(登録商標)や無線LANなど、無線通信でデータを送受信する機能が内蔵されているものが多く、無線通信時の電波強度を計測することで機器間の距離を調べることができる。本発明では、無線通信は、数十mを到達可能距離としたBluetoothなどの近距離無線通信が適しており、さらには通信強度が規格化されたものが好ましい。
【0033】
通信強度(発信する電波の強度)を複数段階に変更可能な無線通信においては、通信強度を変えながら相手機と通信を行い、どの通信強度まで通信可能であり、どの通信強度で通信不可となったかによって、通信相手との距離を認識することができる。たとえば、通信強度を1〜10までの10段階に変更可能とし、1段階高める毎に通信可能距離が2m増えるものとすれば、通信可能な最小通信強度が1段階のとき、機器間の距離Lは0≦L<2m、最小通信強度が2段階のときは2≦L<4m、最小通信強度が3段階のときは4≦L<6m、・・ というように算出することができる。たとえば、通信強度を変えて所定のコマンドを送信し、それに対する応答が相手機から来れば通信可能な通信強度(電波強度)と判定し、応答がなければ通信できない電波強度と判定して、最小通信強度を送信側で特定することができる。
【0034】
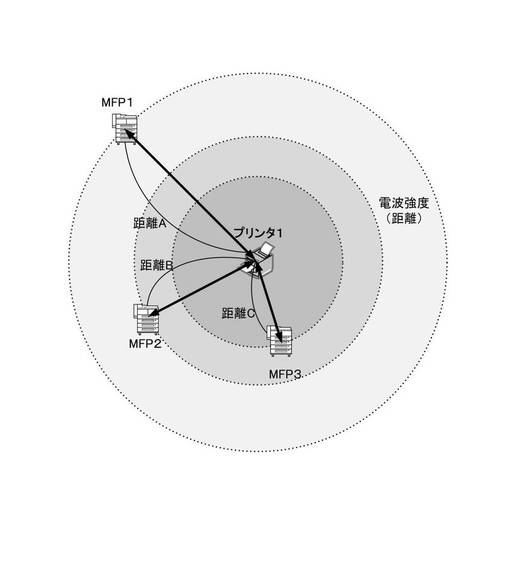
図2は、三角測量によって機器の位置を特定する様子を示している。なお、画像形成装置10をMFPと表し、MFP1、MFP2、MFP3…などのように末尾の番号は機器を識別するための番号とする。また、プリンタを示す場合についても、プリンタ1、プリンタ2、プリンタ3…のように末尾の番号は各プリンタの識別番号とする。
【0035】
図2において、MFP1、MFP2,MFP3の各位置が既知であれば、プリンタ1の位置は、MFP1とプリンタ1との距離Aと、MFP2とプリンタ1との距離Bと、MFP3とプリンタ1との距離Cから、三角測量法によって導出することができる。なお、位置が既知のMFPが4か所以上に存在する場合は、4台以上の各MFPとプリンタ1との間でそれぞれ計測した距離を統計的に集計することで、より精度の高い位置計測が可能となる。
【0036】
以後、位置が既にわかっており、他の機器の位置を求めるための基準となる機器(図2のMFP1、2、3など)を管理MFPと呼ぶものとする。
【0037】
本発明では、図3に示すように、位置が既知の3台の管理MFP1〜3と位置検出対象のMFP4との間の距離A、B、Cを、これらの間の電波強度に基づいて求めてMFP4の位置を導出する。そして、MFP4の位置が求まると、以後は、該MFP4を、別の機器の位置を検出する際に利用可能な管理MFPの1つに加えるようになっている。
【0038】
図4は、管理MFP4が加わることによって位置検出可能エリアが拡張された様子を示している。管理MFP1〜4のそれぞれを中心とする円は、その管理MFPの通信可能エリアを示しており、この円内に存在する機器までの距離を測定することができる。管理MFP4が加わる前の状態、すなわち、管理MFP1〜3のみが存在するときは、管理MFP1の通信可能エリアC1と、管理MFP2の通信可能エリアC2と、管理MFP3の通信可能エリアC3が全て重複する領域E1(図中、グレーで塗りつぶした領域)が、新たな機器の位置を検出可能な領域である。この領域E1内にあったMFP4が管理MFPの1つに加わることで、位置検出可能な領域は、既存の領域E1と、新たに増加した領域E2(図中、斜線を施した領域)とを併せた領域に拡張される。
【0039】
同図では、拡張された位置検出可能な領域E2は、管理MFP1と管理MFP2と管理MFP4の通信可能エリアC1、C2、C4が重複している領域E2(1)と、管理MFP2と管理MFP3と管理MFP4の通信可能エリアC2、C3、C4が重複している領域E2(2)と、管理MFP1と管理MFP3と管理MFP4の通信可能エリアC1、C3、C4が重複している領域E2(3)で構成される。
【0040】
また、管理MFP1〜管理MFP4の通信可能エリアC1、C2、C3、C4がすべて重複している領域では、4台の管理MFP1〜4によって別の機器の位置検出が可能となるので、より精度の高い位置計測が可能になる。
【0041】
以上のように3台以上の管理MFPを基準に測定した距離に基づいて新たな機器の位置を検出する場合、各管理MFPの位置情報および測定した距離を1つの装置に収集して三角測量法の演算を行う必要がある。ここでは、管理MFPと別体に設けた遠隔管理サーバに情報を収集して演算を行う第1方式の機器配置検出システムと、管理MFP間で情報交換し、いずれかの管理MFPが三角測量法に基づく演算を行う第2方式の機器配置検出システムを例示して説明する。
【0042】
図5は、第1方式の機器配置検出システムの構成例を示している。この例では、1つの広いオフィス2内に、複数台の管理MFPが設置されており、各管理MFPは、管理センターなどに設置された遠隔管理サーバ30と、ネットワークなどを通じて通信可能に接続されている。
【0043】
図6は、MFP(管理MFPも同じ)の概略構成を示している。画像形成装置10(MFP)は、記録紙に画像を形成して出力する機能を備えたプリンタや複合機である。本例では、画像形成装置10は、原稿を光学的に読み取ってその複製画像を記録紙に印刷するコピージョブ、読み取った原稿の画像データをファイルにして保存したり外部端末へ送信したりするスキャンジョブ、パーソナルコンピュータなどの端末装置(以後、PCとも呼ぶ)から受信した印刷データに係る画像を記録紙上に形成して印刷出力する印刷ジョブなどのジョブを実行する機能を備えた複合機である。
【0044】
画像形成装置10は、当該画像形成装置10の動作を統括制御するCPU(Central Processing Unit)11と、このCPU11に接続されたROM(Read Only Memory)12と、RAM(Random Access Memory)13と、スキャナ部14と、プリンタ部15と、表示部16と、操作部17と、画像処理部18と、ハードディスク装置19と、不揮発メモリ21と、ネットワークI/F部22と、無線通信部23とを備えている。
【0045】
CPU11ではOSプログラムをベースとし、その上で、ミドルウェアやアプリケーションプログラムなどが実行される。ROM12には各種のプログラムが格納されており、これらのプログラムに従ってCPU11が処理を実行することでジョブの実行など画像形成装置10の各機能が実現される。RAM13はCPU11がプログラムを実行する際に各種のデータを一時的に格納するワークメモリや画像データを格納する画像メモリなどとして使用される。なお、その他の必要なプログラムはハードディスク装置19からRAM13にロードされて実行される。
【0046】
スキャナ部14は、原稿を光学的に読み取って画像データを取得する機能を果たす。スキャナ部14は、たとえば、原稿に光を照射する光源と、その反射光を受けて原稿を幅方向に1ライン分読み取るラインイメージセンサと、ライン単位の読取位置を原稿の長さ方向に順次移動させる移動手段(モータなどを含む)と、原稿からの反射光をラインイメージセンサに導いて結像させるレンズやミラーなどからなる光学経路、ラインイメージセンサの出力するアナログ画像信号をデジタルの画像データに変換する変換部などを備えて構成される。
【0047】
プリンタ部15は、画像データに応じた画像を記録紙上に形成して出力する機能を果たす。ここでは、記録紙の搬送装置と、感光体ドラムと、帯電装置と、レーザユニットと、現像装置と、転写装置と、分離装置と、クリーニング装置と、定着部とを有し、電子写真プロセスによって画像形成を行う、所謂、レーザープリンタとして構成されている。
【0048】
画像形成装置10の操作パネルは表示部16と操作部17を備えて構成される。表示部16は、液晶ディスプレイ(LCD…Liquid Crystal Display)などで構成され、各種の操作画面、設定画面などを表示する機能を果たす。操作部17は、ユーザからジョブの投入や設定など各種の操作を受け付ける機能を果たす。操作部17は、表示部16の画面上に設けられて押下された座標位置を検出するタッチパネルのほかテンキーや文字入力キー、スタートキーなどを備えて構成される。
【0049】
画像処理部18は、画像の拡大縮小、回転などの処理のほか、印刷データをイメージデータに変換するラスタライズ処理、画像データの圧縮、伸張処理などを行う。
【0050】
ハードディスク装置19は、大容量不揮発の記憶装置であり、プログラムのほか、たとえば、印刷データや画像データ、ジョブ履歴の保存などに使用される。不揮発メモリ21は、電源がオフされても記憶内容が破壊されないメモリ(フラッシュメモリ)であり、各種設定情報の保存などに使用される。
【0051】
ネットワークI/F部22は、LAN(Local Area Network)などのネットワークを通じてPCやその他の外部装置との間でデータを有線で通信する。無線通信部23は、他のMFPやプリンタなどの機器と無線で通信する機能を果たす。端末装置(PC)などとの通信に使用されてもよい。無線通信部23は、他の装置と無線通信したときの電波強度を計測する(もしくは電波強度から距離を求める)機能を備えている。
【0052】
図7は、遠隔管理サーバ30の概略構成を示している。遠隔管理サーバ30は、CPU31と、ROM32と、RAM33と、入出力I/F部34と、不揮発メモリ35と、ハードディスク装置36と、ネットワークI/F部37とを備えている。さらに入出力I/F部34を介して、キーボードやマウスなどの入力デバイス38と、液晶ディスプレイなどの表示装置39が接続されている。
【0053】
ROM32には起動用のプログラムや固定データが記憶される。RAM33には、ハードディスク装置36からロードしたプログラムが記憶される。またRAM33は、CPU31がプログラムを実行する際に各種のデータを一時的に格納するワークメモリなどとして使用される。
【0054】
不揮発メモリ35は、電源をオフにしても記憶内容が破壊されないメモリ(フラッシュメモリ)である。ハードディスク装置36は、大容量不揮発の記憶装置であり、OSプログラムや画像形成装置10のドライバプログラム、ミドルウェア、各種アプリケーションプログラム、ファイル、データなどが保存される。ハードディスク装置36にはさらに、機器登録リスト41、マップデータ42、当該遠隔管理サーバ30で作成したフロアマップ43なども保存される。
【0055】
ネットワークI/F部37は、LANなどのネットワークを介して画像形成装置10(MFP、管理MFP)や他の外部装置と通信する機能を果たす。
【0056】
図8は、機器登録リスト41の一例を示している。機器登録リスト41には、位置の判明している機器(管理MFP)に関する各種の情報が登録される。図8に示す機器登録リスト41には、機器(管理MFP)の識別情報である機器IDに対応付けて、当該機器IDが示す管理MFPのIPアドレスと、無線アドレスと、位置情報と、信頼度と、その他の機器情報が登録される。無線アドレスは、無線通信でのアドレス(ここでは、Bluetoothデバイスアドレス)である。位置情報は、機器IDが示す管理MFPの設置位置を示す情報であり、ここでは、予め定めた位置を原点としたXY座標で表される。座標の単位は、cmなど、適宜に設定される。
【0057】
信頼度は、位置情報が示す位置の信頼性を示す情報である。その他の機器情報には、その機器(管理MFP)の機種名、機能、状態(たとえば、各給紙トレイの状態(用紙サイズや用紙の量など)、MFPがPCからジョブを受信可能か否か(ビジーか否か)など)が登録される。機器の状態を示す情報は、たとえば、各機器と遠隔管理サーバ30とが所定の周期で通信して収集し、更新するようにするとよい。
【0058】
各オフィス2(設置場所)において、少なくとも3台の管理MFPについては、たとえば、サービスマンが、基準点から巻尺で計る、あるいはGPS機器などで方位を測定する、などによって実測された位置情報が入力されて機器登録リスト41に登録される。このように実測された位置情報は、信頼性が高いので、信頼度1が登録される。なお、ここでは、信頼度は、数値が大きくなるほど位置情報が示す位置の信頼性が低いものとする。
【0059】
マップデータ42は、オフィス2の間取りや机の配置などを示すデータである。フロアマップ43は、マップデータ42上に管理MFPなど位置情報の判明している機器を示す図柄やマークを配置して示した図であり、機器の状態情報なども表示される。フロアマップ43は、遠隔管理サーバ30がマップデータ42や機器登録リスト41に基づいて作成する。フロアマップ43は、ハードディスク装置36に保存されるほか、遠隔管理サーバ30が表示装置39に表示したり、通信により管理MFPや他の外部端末などへ送信したりする。
【0060】
遠隔管理サーバ30は、新たな機器の位置検出を行う際に、機器登録リスト41に登録されている中の少なくとも3台の管理MFPを選択する。なお、遠隔管理サーバ30は、位置検出対象の機器と無線通信可能な管理MFPの中から少なくとも3台を選択する。そして、選択した管理MFPから、それぞれの管理MFPと位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る管理MFPの機器登録リスト41に登録されている位置情報とに基づいて、位置検出対象の機器の位置情報を導出する。そして、この位置情報を導出した機器を新たな管理MFPとして機器登録リスト41に追加登録するようになっている。すなわち、位置検出対象の機器(MFP)の機器IDやIPアドレス、無線アドレスなどをその機器と通信して(あるいは既存の管理MFPを介した通信で)入手し、これらと先ほど導出した位置情報とを対応付けて機器登録リスト41に追加登録する。
【0061】
図9は、第1方式のシステム構成における機器配置検出システムのより具体的な設置例を示している。たとえば新たに設置されたプリンタ1の位置検出を行う場合、各管理MFP1〜3は、遠隔管理サーバ30にそれぞれプリンタ1と無線通信したときの電波強度データ(距離データ)を送付する。遠隔管理サーバ30はこれらの電波強度データ、および事前に設定された各管理MFP1〜3の位置情報(機器登録リスト41に登録されている)からプリンタ1の位置情報(絶対位置)を特定する。
【0062】
同様に管理MFP1、2、3からの距離を電波強度に基づいて測定することで、プリンタ2、プリンタ3、プリンタ4の位置情報も導出されて遠隔管理サーバ30に登録される。
【0063】
遠隔管理サーバ30は、管理MFP1〜3の位置情報、プリンタ1〜4の位置情報と、マップデータ42と、各機器から収集したカウンタ情報やその他の機器情報に基づいて、フロアマップ43を作成する。この方法は、主にサービスマンなどがMPS(Managed Print Service)用フロアマップを作成する際に使用する方法である。フロア上のプリンタの位置情報は遠隔管理サーバ30にて集計され、さらに図10に示すような、付加情報を追加することで、より具体的なフロアマップが生成される。
【0064】
図11は、図9の構成において、プリンタ1の位置検出を行う場合における本システムの動作シーケンスを示している。各管理MFP1〜3は、プリンタ1を検出すると(ステップS101)、プリンタ1との距離を電波強度に基づいて計測し(ステップS102)、その計測した距離を示す距離情報を遠隔管理サーバ30にそれぞれ送信する(ステップS103)。なお、各管理MFPが電波強度を遠隔管理サーバ30に送信し、遠隔管理サーバ30がその電波強度を距離に換算するように構成されてもよい。
【0065】
遠隔管理サーバ30は、各管理MFP1〜3から距離情報を受信・検出し(ステップS201)、これらの距離情報と、機器登録リスト41に登録してある管理MFP1〜3の位置情報に基づいて、プリンタ1の位置(位置情報)を計算で求める(ステップS202)。そして、プリンタ1の位置情報を各管理MFP1〜3に送信する(ステップS203)。これを受信した各管理MFP1〜3は、自装置内の管理テーブルにプリンタ1の位置情報を登録する(ステップS104)。なお、各管理MFPは、同じフロア内のすべての管理MFPやプリンタの位置情報および機器情報を自装置内の管理テーブルに登録して、そのフロア内の設置機器に関する情報を共有するようになっている。たとえば、機器登録リスト41と同様の内容が各管理MFPの管理テーブルに登録される。
【0066】
遠隔管理サーバ30は、プリンタ1をその位置情報と共に機器登録リスト41に追加登録する(ステップS204)。プリンタ1のIPアドレスや無線アドレスなども管理MFPから入手して登録される。その後、遠隔管理サーバ30は、管理者などからの要求に応じてフロアマップ43を作成する(ステップS205)。
【0067】
次に、管理MFPが情報を集計して位置情報を導出する第2方式による機器配置検出システムについて説明する。
【0068】
第2方式による機器配置検出システムでは、管理MFP自体が情報の集計を行うので、図12に示すように、たとえば、管理MFP1のユーザは、管理MFP1の操作パネル50上で、周辺のMFPやプリンタの位置を閲覧・確認して各種の操作を行うことが可能になる。
【0069】
たとえば、あるジョブを別のMFPに転送して印刷させる場合は、転送先のMFPを選択する必要があり、従来はプリンタ名称やIPアドレスを操作パネル上で指定することで転送先を指定していた。しかし、第2方式の機器配置検出システムの管理MFPでは、新設された機器の位置情報が自動的に検出されて登録されるので、事前に位置情報を手動で登録することなく、周囲のMFPやプリンタの位置情報を操作パネル上に表示することができ、操作性が向上する。
【0070】
図13は、第2方式による機器配置検出システムにおける画像形成装置10B(管理MFP)の構成例を示している。図6に示した第1方式の画像形成装置10と同一部分には同一の符号を付してそれらの説明は省略する。第2方式では、不揮発メモリ21内に、図8の機器登録リスト41と同様のものが作成されて記憶される。ただし、第2方式の機器登録リスト41には、どの管理MFPが自装置であるかを示す情報が登録される。
【0071】
図14は、第2方式の機器配置検出システムにおける管理MFPが、プリンタ1の位置検出を行う場合の動作シーケンスを示している。ここでは、プリンタ1を検出した管理MFPの中のいずれか1台(最初に集計MFPになることを宣言した管理MFP)が集計MFPとなり、集計MFPに他の管理MFPからの情報を集計し、集計MFPがプリンタ1の位置を算出するようになっている。そして、算出したプリンタ1の位置情報を他の全ての管理MFPに送信して情報を共有するようになっている。
【0072】
管理MFPは、プリンタ1を検出すると(ステップS301)、プリンタ1との距離を電波強度に基づいて計測する(ステップS302)。次に、周囲の管理MFPを検索し(ステップS303)、すでに集計MFPになることを宣言している他の管理MFPが存在するか否かを調べる(ステップS304)。
【0073】
集計MFPが既に存在する場合は(ステップS304;Yes)、その集計MFPに対してプリンタ1までの距離と自装置の位置情報とを送信する(ステップS305)。なお、送信先の集計MFPの機器登録リスト41には既に自装置の位置情報が登録されているので、位置情報に代えて、自装置の識別情報(たとえばIPアドレスや、機器ID)を送信してもよい。
【0074】
集計MFPが存在しない場合は(ステップS304;No)、自装置を集計MFPに設定する(ステップS307)。そして、周囲の他の管理MFPからの接続を待つ(ステップS308)。他の管理MFPから接続があると、その管理MFPから距離情報と位置情報を受信して取得する(ステップS309)。自装置を含めて、3台以上の管理MFPが計測した距離とその管理MFPの位置情報が集計されるまで(ステップS310;No)、ステップS308〜S310の処理を繰り返し行い、3台分以上集計できたら(ステップS310;Yes)、その集計した情報に基づいてプリンタ1の位置情報を算出する(ステップS311)。算出したプリンタ1の位置情報を自装置の機器登録リスト41に登録すると共に、他の全ての管理MFPおよびプリンタ1に送信して情報を共有する(ステップS312)。
【0075】
他の管理MFPにおいては、集計MFPからプリンタ1の位置情報を受信し、これを自装置の機器登録リスト41に登録して情報共有する(ステップS306)。
【0076】
図15は、図14の処理によって、位置検出されたプリンタ1が、管理MFPの1つに加わるように変遷する動作シーケンスを示している。図14と同一の処理には同一のステップ番号を付してある。プリンタ1を接続すると(ステップS401)、管理MFP1〜3がプリンタ1を検出し、図14で説明した動作を行って、プリンタ1の位置情報を導出する。この例では、管理MFP2が集計MFPとなっている。
【0077】
プリンタ1は、集計MFP2から通知された情報を受信し、これを自装置の機器登録リスト41に登録する(ステップS402)。なお、集計MFP2は、プリンタ1の位置情報だけでなく、集計MFP2が保有している機器登録リスト41全体(プリンタ1登録済みのもの)をプリンタ1に送信し、その情報全部を共有するようになっている。
【0078】
プリンタ1は機器登録リスト41を共有することで、新たな管理MFPとなり(ここでは、管理MFP4になり)、以後、別の機器の位置検出において管理MFPの1つとして参加するようになる(ステップS403)。
【0079】
次に、信頼度について説明する。
【0080】
以下に説明する信頼度およびその利用方法は第1、第2方式の機器配置検出システムに共通である。
【0081】
距離計測に使用可能な管理MFPが3台以上存在する場合、各管理MFPの位置情報の精度(信頼性)を示す信頼度情報を利用することで、もっとも適切な管理MFPを選択して新たな機器の位置情報を検出でき、検出する位置情報の精度向上を図ることができる。
【0082】
以下にその具体例を図16に基づいて説明する。位置検出において、少なくとも3台の管理MFPの位置情報は既知であることが必要なので、システムを構築した最初の段階では、たとえば、管理MFP1、2、3について、手動で位置情報の設定を行う。この位置情報は、GPSなどを使用した高精度の情報であり、もっとも精度(信頼性)が高く、信頼度1を付与する。
【0083】
次に、これらの管理MFP1〜3を基準にして新たな機器(新MFP-Aとする)の位置を検出した場合、新MFP-Aの位置情報は、誤差を含む測定値であるため、管理MFP1〜3の位置情報に比べて精度(信頼性)が低い。そこで、この新MFP-Aの位置情報に与える信頼度は、管理MFP1〜3の位置情報より信頼性の低い値にする。ここでは、信頼度は数値が大きいほど、信頼性は低く、位置検出の基準にした管理MFP1〜3の信頼度の合計値を、新MFP-Aの信頼度とする。したがって、新MFP-Aの信頼度は「3」になる(図16(1))。
【0084】
次に、新たに新MFP-Bが追加されたものとする(図16(2))。新MFP-Bは管理MFP1の通信可能エリア外(圏外)なので、新MFP-Bの位置検出は、MFP2、MFP3、新MFP-Aの3台を基準に行われる。
【0085】
この場合、新MFP-Aの位置情報を使用するため、新MFP-Aよりも信頼性は低くなる。ここでは、位置検出の基準にした管理MFPの信頼度の合計値を、その検出された位置情報の信頼度とするので、新MFP-Bの信頼度は、MFP2、MFP3、新MFP-Aの各信頼度の合計値の「5」となる。
【0086】
さらに、別の新MFP-Cが追加された場合(図16(3))、この新MFP-Cの位置検出には、管理MFP2、3、新MFP-A、新MFP-Bの4台を使用することができる。この際には、信頼性の高いもの(信頼度の数値が小さいもの)を優先して基準となる3台のMFPを選択することで、より精度の高い位置検出が可能になる。図16(3)の場合、信頼度「1」の管理MFP2、3、と信頼度「3」の新MFP-Aを選択することで、新MFP-Cの位置情報を信頼度「5」の信頼性で求めることができる。
【0087】
仮に、管理MFP2、3と信頼度「5」の新MFP-Bを使用すると、新MFP-Cの位置情報は信頼度「7」になる。管理MFP3と信頼度「3」の新MFP-Aと、信頼度「5」の新MFP-Bを使用すると、新MFP-Cの位置情報は信頼度「9」になる。
【0088】
遠隔管理サーバ30や集計MFPは、新たな機器の位置を検出したとき、上記の演算を行って、その検出した位置情報の信頼度を算出し、これを位置情報と共に機器登録リスト41に登録する、あるいは他の管理MFP、プリンタと共有するようになっている。
【0089】
図17は、信頼度に基づいて、位置検出に使用する管理MFPを選択する場合の動作のシーケンスの一例を示している。図14、図17と同一の処理には同一のステップ番号を付してある。管理MFP1〜3はそれぞれ信頼度1とする。これら管理MFP1〜3を基準に計測した距離情報を収集した集計MFP2は、新規に接続されたプリンタ1の位置情報を導出する。プリンタ1の信頼度は、管理MFP1〜3の信頼度の合計値である「3」になる。プリンタ1の位置情報および信頼度は、全ての管理MFPおよびプリンタ1に配信されて共有される(ステップS306B、S312B、402B)。これにより、プリンタ1も管理MFPの1つに加えられる。
【0090】
その後、管理MFP1〜3とプリンタ1の4台を管理MFPとして使用可能な状態で新規にプリンタ2が接続されると、集計MFP2はこれら4台の管理MFPの中から信頼度に基づいて3台を選択して、プリンタ2の位置情報を導出する(ステップS311B)。すなわち、信頼度の合計が最小になる3台の組み合わせとして、管理MFP1〜3を選択し、これらにより、プリンタ2の位置情報を導出する。プリンタ2の信頼度は、管理MFP1〜3の信頼度の合計値である「3」になる。プリンタ2の位置情報および信頼度は、全ての管理MFP1から3およびプリンタ1、2に配信されて共有される(ステップS306B,S312B、402B)。これにより、プリンタ2も管理MFPの1つに加えられる。
【0091】
次に、信頼度の変形例について説明する。
【0092】
信頼度は、新たに検出する位置情報の信頼性を左右する要素と考えられる。該要素は、検出の基準となる位置情報の信頼性に限定されるものではなく、たとえば、基準となる管理MFPと位置検出対象の機器との距離の大小にも依存する。すなわち、位置検出対象の機器に近い管理MFPを使用するほど、電波強度による距離の測定精度は高まる。
【0093】
そこで、基準となる管理MFPの位置情報の信頼度に対して、その管理MFPと位置検出対象の機器との距離に応じた重み付けを行い、重み付け後の信頼度の合計が最小となる管理MFPの組み合わせを選択するようにしてもよい。位置検出された機器の位置情報に与える信頼度は、重み付け後の信頼度の合計値とすればよい。
【0094】
たとえば、管理MFPと機器との距離Lが5>L≧0mの場合、重み計数αは1.0、7>L≧5mの場合、重み計数αは1.2、9>L≧7mの場合、重み計数αは1.4、11>L≧9mの場合、重み計数αは1.6、L≧11mの場合、重み計数αは2.0のように定めておく。そして、管理MFP1〜3の位置情報の信頼度をF1、F2、F3、各管理MFPと機器との距離に対応する重み計数をα1、α2、α3とすると、これらを使用して求めた位置情報の信頼度FnはFn=、F1×α1+F2×α2+F3×α3、のように求める。
【0095】
なお、信頼度が高いものを利用するか、信頼度が低いものを含むがより多くの管理MFPを基準にして位置検出を行うかを、選択可能(設定変更可能)に構成してもよい。
【0096】
このほか、基準となる3台と、位置検出対象の機器との位置関係なども信頼度を定める要素としてもよい。たとえば、位置検出対象の機器が3台を頂点とする三角形の内側になるか、外側になるか、位置検出対象の機器と基準となる各管理MFPとを結ぶ3本の直線の角度が、なるべく120度に近い角度で相違する、すなわち、3台の管理MFPが位置検出対象の機器から同じような方角にあるのではなく、方位的にも分散しているか否かなどを、信頼度を定める要素にしてもよい。
【0097】
次に、位置検出対象のプリンタの位置検出に使用可能な管理MFPが4台以上存在する場合に、3台の組み合わせ毎に位置情報を導出して精度を高める方法について説明する。
【0098】
ここでは、位置検出対象のプリンタの位置検出に使用可能な管理MFPが4台以上存在する場合に、3台の組み合わせを複数組作成し、それぞれの組で位置検出対象のプリンタの位置情報を導出し、その中から精度不良のものを除外して、最終的な位置(位置情報)を求める。
【0099】
図18に示すように、位置検出対象のプリンタ1を測定する管理MFPが4台ある場合、測定に使用する3台の管理MFPの組み合わせは、同図の表60に示すように、4組(パターン)存在する。また、3台の管理MFPの組にてそれぞれ測定されたプリンタ1の位置を、同図上段の配置図中の1から4の番号を付した円印で示す(本文中では、測定位置1〜4とする)。
【0100】
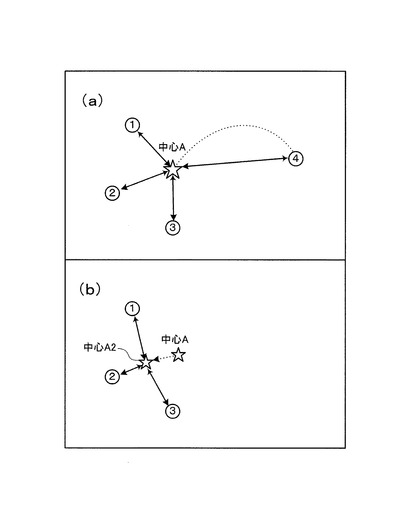
各測定位置1〜4には、電波の状況などにより、精度が低いものが含まれている場合がある。特に管理MFPとプリンタ1との間に壁などの遮蔽物が存在する場合には、精度が著しく落ちてしまう。そこで、より高い精度で位置測定を行うために、精度の低いと思われる測定位置を除外する。除外方法には、以下の除外法1、除外法2などがある。
【0101】
<除外法1> 図19(a)に示すように、測定位置1〜4の各座標から、その中心位置Aを求める。この中心位置Aの座標から各測定位置1〜4までの距離を計算し、中心位置Aから最も遠い測定位置(ここでは、測定位置4)を除外する。そして、残りの測定位置1〜3の中心位置A2を求め、これを最終的なプリンタ1の測定位置に決定する(同図(b))。このように、精度不良の測定位置を除外し、残りの複数の測定位置から位置検出対象の最終的な位置情報を決定することで、精度が向上する。
【0102】
<除外法2> 各測定位置の中心位置Aから一定比率以上離れているものを除外する。すなわち、中心位置Aと測定位置との距離が、中心位置Aと各測定位置との距離の平均値に対して、一定以上の比率となるものを除外する。たとえば、距離が、平均距離の2倍あるいは3倍以上のものは除外する。測定位置の偏差や標準偏差を求め、偏差あるいは偏差値が規定値以上となる測定位置を除外する、という除外法などでもよい。このように、精度不良の測定位置を除外し、残りの複数の測定位置から位置検出対象の最終的な位置情報を決定することで、精度が向上する。
【0103】
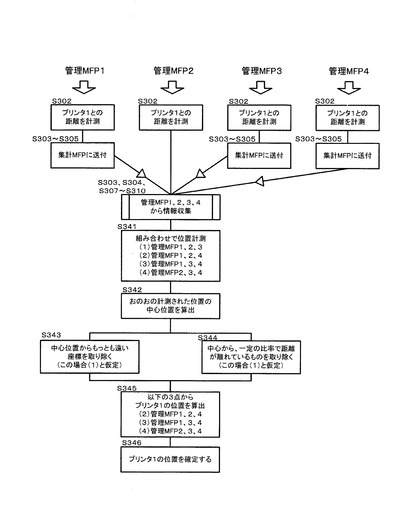
図20は、プリンタ1の位置を管理MFP1〜4に対して除外法を適用して求める場合の動作シーケンスを示している。集計MFPは管理MFP2とする。図14と同一の処理には同一のステップ番号を付してある。
【0104】
集計管理MFP2は、管理MFP1〜4から収集した位置情報に基づき、(1)管理MFP1、2、3、(2)管理MFP1、2、4、(3)管理MFP1、3、4、(4)管理MFP2、3、4、の4組を設定し、それぞれの組により、プリンタ1の位置を計測する(ステップS341)。次に、ステップS341で求めた複数の測定位置の中心位置を求める(ステップS342)。そして、除外法1、または除外法2により、精度不良の測定位置を取り除く(ステップS343またはS344)。ここでは、(1)組に対応する測定位置1が精度不良であったとする。
【0105】
精度不良のものを除く複数の測定位置(ここでは、(2)、(3)、(4)の各組の測定位置2、3、4)からプリンタ1の位置を算出(測定位置2、3、4の中心位置を算出)し(ステップS345)、これをプリンタ1の最終的な位置に確定する(ステップS346)。
【0106】
なお、上記の除外法と、前述した信頼度に基づく方法とを組み合わせてもよい。たとえば、位置検出対象の測定に使用可能な管理MFPが多数存在する場合、3台ずつの組み合わせを、信頼度が小さくなる順で上位から複数組選択し、これら複数組のそれぞれで位置検出対象の位置(測定位置)を求め、それらの中から精度不良のものを上記除外法によって除外し、精度不良を除いた複数の測定位置から最終的な位置を決定する、というようにすれば、効率的にかつより高い精度で、位置検出対象の位置を求めることができる。特に5台以上の管理MFPを利用可能な場合、3台の選択方法が多数あるので、信頼度と除外法を併用することで、効率的にかつ高い精度で位置情報を検出することができる。
【0107】
次に、無線通信機能を備えた端末装置(PC)の位置を、管理MFPによって測定する場合について説明する。
【0108】
近年では、BlueToothなどの無線機能を持つPCも増えており、管理MFPからの電波測定により、PCの位置測定も可能となる。また、MFPをPCから利用するためには、通常、そのMFP用のプリンタドライバなどのユーティリティをPCにインストールして利用するため、このユーティリティに管理MFPと共同して位置測定する機能や、位置測定に関する管理MFPと同様の機能を搭載することで、たとえば、図21に示すように、PCを、集計MFP(あるいは遠隔管理サーバ30)として機能させて、新たな機器の位置測定を行ったり、フロアマップをディスプレイに表示したりすることができる。
【0109】
以上、本発明の実施の形態を図面によって説明してきたが、具体的な構成は実施の形態に示したものに限られるものではなく、本発明の要旨を逸脱しない範囲における変更や追加があっても本発明に含まれる。
【0110】
実施の形態では、信頼度や除外法に関する例を第2方式の機器配置検出システムによって説明したが、信頼度や除外法は、遠隔管理サーバ30を使用する第1方式の機器配置検出システムにおいても同様に適用することができる。第2方式では、全ての管理MFPに、全ての管理MFPが登録された機器登録リスト41を記憶するようにしたが、個々の管理MFPは、自装置の位置情報(信頼度を使用する場合はさらに信頼度)のみを記憶する構成でもよい。この構成では、第1方式で遠隔管理サーバ30が記憶していた機器登録リスト41は各管理MFPに分散して記憶されていることになる。集約MFPが新たな機器の位置を計算する際に、各管理MFPの位置情報やその管理MFPから位置検出対象の機器までの距離を収集するようにすればよい。そして、算出した位置検出対象の機器の位置情報をその機器に登録することで、追加登録が行われる。
【0111】
信頼度の決定方法は実施の形態に例示したものに限定されない。位置情報の導出された機器の位置情報の信頼度が、その導出に使用された機器(基準となる機器)の位置情報の信頼度より低くなるようにすればよい。すなわち、導出した位置情報に付与する信頼度は、位置情報の導出に使用された機器の位置情報の信頼度に基づいて、それより低くなるように決定されればよい。
【0112】
第2方式の機器配置検出システムにおいても、遠隔管理サーバ30と同様にフロアマップ43を作成するように構成されてもよい。たとえば、各管理MFPあるいは特定の管理MFPにマップデータ42を登録しておき、管理MFPのCPU11が、このマップデータ42と各機器の位置情報とから、機器の図柄などをマップデータが示す地図(見取り図)上に表示したフロアマップ43を生成するようにすればよい。フロアマップ43はMFPの操作パネルに表示してもよい。また、第2方式においても、フロアマップ43上に各機器の状態を収集して表示するよう構成してもよい。
【0113】
電波強度に基づく距離の算出は、通信強度を段階的に変化させてMFP−PC間の距離を求める方法のほか、たとえば、信号対ノイズ比など通信品質を示す情報から距離を求めるようにしてもよく、既知の任意の方法でよい。
【0114】
実施の形態では画像形成装置10が複合機の場合を例に説明したが、端末装置から何らかのジョブを受信して実行する装置であればよく、ネットワーク接続可能なプリンタなどでもかまわない。
【符号の説明】
【0115】
2…オフィス
10…画像形成装置(MFP)
11…CPU
12…ROM
13…RAM
14…スキャナ部
15…プリンタ部
16…表示部
17…操作部
18…画像処理部
19…ハードディスク装置(HDD)
21…不揮発メモリ
22…ネットワークI/F部
23…無線通信部
30…遠隔管理サーバ
31…CPU
32…ROM
33…RAM
34…入出力I/F部
35…不揮発メモリ
36…ハードディスク装置
37…ネットワークI/F部
38…入力デバイス
39…表示装置
41…機器登録リスト
42…マップデータ
43…フロアマップ
50…操作パネル
60…4台から作成された3台の管理MFPの組を示す一覧表
A…MFP1とプリンタ1との距離
B…MFP2とプリンタ1との距離
C…MFP3とプリンタ1との距離
C1…管理MFP1の通信可能エリア
C2…管理MFP2の通信可能エリア
C3…管理MFP3の通信可能エリア
E1…C1、C2、C3が全て重複する領域
E2…MFP4が管理MFPの1つに加わることで拡張された領域
【特許請求の範囲】
【請求項1】
無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部と、
無線通信機能を備えた位置検出対象の機器と前記機器登録部に登録されている中の少なくとも3台の機器のそれぞれとの間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した前記位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録する機器追加登録部と、
を有する
ことを特徴とする機器配置検出システム。
【請求項2】
前記位置検出部は、前記機器登録部に登録されている機器の中から前記位置検出対象の機器の位置情報の導出に使用する前記少なくとも3台の機器を、導出する位置情報の精度が高まるものを優先して、選定する
ことを特徴とする請求項1に記載の機器配置検出システム。
【請求項3】
前記機器登録部に登録された位置情報には、その位置情報の信頼性を示す信頼度が付与されており、
前記位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて、信頼度決定部が決定し、
前記位置検出部は、信頼性の高い位置情報を優先して、前記選定を行う
ことを特徴とする請求項2に記載の機器配置検出システム。
【請求項4】
前記位置検出部は、前記導出に使用する少なくとも3台の機器の組み合わせを複数組設定し、組毎に、前記位置検出対象の機器の位置情報を導出し、これら複数の位置情報に基づいて、前記位置検出対象の機器に対する最終的な位置情報を導出する
ことを特徴とする請求項1に記載の機器配置検出システム。
【請求項5】
前記組毎に導出した複数の位置情報の中から精度不良の位置情報を除外した位置情報に基づいて、前記最終的な位置情報を導出する
ことを特徴とする請求項4に記載の機器配置検出システム。
【請求項6】
前記位置検出部で求めた前記位置検出対象の機器の位置情報を、前記機器登録部に登録されている機器に送信する送信部を有する
ことを特徴とする請求項1乃至5のいずれか1つに記載の機器配置検出システム。
【請求項7】
前記機器登録部に登録されている情報に基づいて、前記機器登録部に登録されている機器の配置レイアウトマップを作成するマップ作成部を備え、
前記マップ作成部が作成した配置レイアウトマップを所定の表示部に表示させる
ことを特徴とする請求項1乃至6のいずれか1つに記載の機器配置検出システム。
【請求項8】
機器の状態情報を取得する機器状態取得部を有し、
前記マップ作成部は、前記機器状態取得部が取得した状態情報に基づいて、前記配置レイアウトマップ内に機器の状態を表示する
ことを特徴とする請求項7に記載の機器配置検出システム。
【請求項9】
情報処理装置が、無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部の中の少なくとも3台の機器のそれぞれと無線通信機能を備えた位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出するステップと、
情報処理装置が、前記ステップで導出した位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録するステップと、
を有する
ことを特徴とする機器配置検出方法。
【請求項10】
無線通信部と、
位置情報が既知の他の機器から該機器の位置情報と該機器が位置検出対象の機器と無線通信したときの信号強度とを取得する取得部と、
自装置の位置情報と、前記無線通信部で前記位置検出対象の機器と無線通信したときの信号強度と、前記取得部によって少なくとも2台の他の機器から取得した位置情報および信号強度とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した位置情報を前記位置検出対象の機器に送信する送信部と、
を備え、
前記位置検出部が位置情報を導出した前記機器を、位置情報が既知の他の機器の1つに加えて、別の機器の位置情報を導出する
ことを特徴とする機器。
【請求項1】
無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部と、
無線通信機能を備えた位置検出対象の機器と前記機器登録部に登録されている中の少なくとも3台の機器のそれぞれとの間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した前記位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録する機器追加登録部と、
を有する
ことを特徴とする機器配置検出システム。
【請求項2】
前記位置検出部は、前記機器登録部に登録されている機器の中から前記位置検出対象の機器の位置情報の導出に使用する前記少なくとも3台の機器を、導出する位置情報の精度が高まるものを優先して、選定する
ことを特徴とする請求項1に記載の機器配置検出システム。
【請求項3】
前記機器登録部に登録された位置情報には、その位置情報の信頼性を示す信頼度が付与されており、
前記位置検出部が導出した位置情報に付与する信頼度は、該位置情報の導出に使用された機器の位置情報の信頼度に基づいて、信頼度決定部が決定し、
前記位置検出部は、信頼性の高い位置情報を優先して、前記選定を行う
ことを特徴とする請求項2に記載の機器配置検出システム。
【請求項4】
前記位置検出部は、前記導出に使用する少なくとも3台の機器の組み合わせを複数組設定し、組毎に、前記位置検出対象の機器の位置情報を導出し、これら複数の位置情報に基づいて、前記位置検出対象の機器に対する最終的な位置情報を導出する
ことを特徴とする請求項1に記載の機器配置検出システム。
【請求項5】
前記組毎に導出した複数の位置情報の中から精度不良の位置情報を除外した位置情報に基づいて、前記最終的な位置情報を導出する
ことを特徴とする請求項4に記載の機器配置検出システム。
【請求項6】
前記位置検出部で求めた前記位置検出対象の機器の位置情報を、前記機器登録部に登録されている機器に送信する送信部を有する
ことを特徴とする請求項1乃至5のいずれか1つに記載の機器配置検出システム。
【請求項7】
前記機器登録部に登録されている情報に基づいて、前記機器登録部に登録されている機器の配置レイアウトマップを作成するマップ作成部を備え、
前記マップ作成部が作成した配置レイアウトマップを所定の表示部に表示させる
ことを特徴とする請求項1乃至6のいずれか1つに記載の機器配置検出システム。
【請求項8】
機器の状態情報を取得する機器状態取得部を有し、
前記マップ作成部は、前記機器状態取得部が取得した状態情報に基づいて、前記配置レイアウトマップ内に機器の状態を表示する
ことを特徴とする請求項7に記載の機器配置検出システム。
【請求項9】
情報処理装置が、無線通信機能を備えた少なくとも3台の機器の位置情報がそれぞれの機器に対応付けて登録された機器登録部の中の少なくとも3台の機器のそれぞれと無線通信機能を備えた位置検出対象の機器との間で無線通信が行われたときの信号強度を取得し、これらの信号強度と、これらの信号強度に係る機器の前記機器登録部に登録されている位置情報とに基づいて、前記位置検出対象の機器の位置情報を導出するステップと、
情報処理装置が、前記ステップで導出した位置情報を前記位置検出対象の機器に対応付けて前記機器登録部に追加登録するステップと、
を有する
ことを特徴とする機器配置検出方法。
【請求項10】
無線通信部と、
位置情報が既知の他の機器から該機器の位置情報と該機器が位置検出対象の機器と無線通信したときの信号強度とを取得する取得部と、
自装置の位置情報と、前記無線通信部で前記位置検出対象の機器と無線通信したときの信号強度と、前記取得部によって少なくとも2台の他の機器から取得した位置情報および信号強度とに基づいて、前記位置検出対象の機器の位置情報を導出する位置検出部と、
前記位置検出部が導出した位置情報を前記位置検出対象の機器に送信する送信部と、
を備え、
前記位置検出部が位置情報を導出した前記機器を、位置情報が既知の他の機器の1つに加えて、別の機器の位置情報を導出する
ことを特徴とする機器。
【図3】



【図5】
【図6】
【図7】
【図8】
【図10】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図1】
【図2】
【図4】
【図9】
【図11】
【図12】
【図21】
【図5】
【図6】
【図7】
【図8】
【図10】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図1】
【図2】
【図4】
【図9】
【図11】
【図12】
【図21】
【公開番号】特開2012−52922(P2012−52922A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−196022(P2010−196022)
【出願日】平成22年9月1日(2010.9.1)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年9月1日(2010.9.1)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
[ Back to top ]