
機械式自動変速装置の制御システム
【課題】本発明は、入力軸が逆回転するような状況でもギヤ鳴りの発生を防止することのできる機械式自動変速装置の制御システムを提供する。
【解決手段】運転者がシフトレバーを操作すると(S10)、入力軸の回転方向を判定し(S12)、入力軸の回転方向がエンジンの回転方向の逆方向であれば(S14)、クラッチ断、ギヤニュートラル制御を実施する(S16)。クラッチが切断され、ギヤニュートラルとなれば(S18)、クラッチ接合制御を実施する(S20)。そして、エンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値以下となれば(S22)、クラッチを再度切断し、入力軸の回転速度と出力軸の補正回転速度との差の絶対値が第2の所定値以下となればギヤ入れを実施する(S24-S34)。
【解決手段】運転者がシフトレバーを操作すると(S10)、入力軸の回転方向を判定し(S12)、入力軸の回転方向がエンジンの回転方向の逆方向であれば(S14)、クラッチ断、ギヤニュートラル制御を実施する(S16)。クラッチが切断され、ギヤニュートラルとなれば(S18)、クラッチ接合制御を実施する(S20)。そして、エンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値以下となれば(S22)、クラッチを再度切断し、入力軸の回転速度と出力軸の補正回転速度との差の絶対値が第2の所定値以下となればギヤ入れを実施する(S24-S34)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、機械式自動変速装置の制御システムに関し、詳しくは、入力軸が逆回転での制御に関する。
【背景技術】
【0002】
車両の変速装置として、手動変速装置における変速機の操作(セレクト及びシフト)及びクラッチの断接をアクチュエータにより作動させることで自動変速を可能とする機械式自動変速装置が知られている。当該機械式自動変速装置は、例えば、特許文献1のように、変速時に変速装置のエンジンから駆動力が入力される入力軸と変速された駆動力を車軸に出力する出力軸の回転速度を検出し、入力軸回転速度と出力軸回転速度に目標変速ギヤ列のギヤ比を乗算して求められる目標回転速度(目標ギヤ入れ回転速度)との差が所定回転速度範囲内にあるときにギヤ入れを行うようにし、変速時のギヤ鳴りの防止、延いてはシンクロ機構を保護するようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−76841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
変速装置は、例えば、登坂路等の上り坂において、ギヤを前進段に入れクラッチを切った状態で車両が後進しているような場合や、降坂路等の下り坂において、ギヤを後進段に入れクラッチを切った状態で車両が前進しているような場合には、入力軸はエンジン回転方向とは反対の回転方向、所謂逆回転することになる。
【0005】
しかしながら、このような入力軸の回転方向がエンジン回転方向に対して逆回転するような状況において、上記特許文献1の変速装置では、入力軸の逆回転を検出することができず、入力軸の回転速度と目標回転速度との差が所定回転速度範囲内となると変速を行うので、入力軸の逆回転時にはギヤ入れした際にギヤ鳴りが発生することとなる。
【0006】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、入力軸が逆回転するような状況にでもギヤ鳴りの発生を防止することのできる機械式自動変速装置の制御システムを提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、請求項1の機械式自動変速装置の制御システムでは、車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記内燃機関から入力される動力を増減速し出力する変速手段と、前記内燃機関の回転速度を検出する第1の回転速度検出手段と、前記入力軸の回転速度を検出する第2の回転速度検出手段と、前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、前記制御手段は、前記入力軸の回転方向が前記内燃機関の回転方向と逆方向である時に、前記ギヤ列のいずれかを係合状態とする前に、前記ギヤ列を無係合状態とし前記クラッチを接合して前記内燃機関の回転方向と前記入力軸の回転方向とを一致させる回転同期制御を行うことを特徴とする。
【0008】
また、請求項2の機械式自動変速装置の制御システムでは、請求項1において、前記回転同期制御時の前記クラッチの接合は、完全に接合させることを特徴とする。
また、請求項3の機械式自動変速装置の制御システムでは、請求項1或いは2において、ギヤポジションを検出するギヤポジション検出手段と、前記出力軸の回転方向と回転速度を検出する第3の回転検出手段と、を備え、前記制御手段は、前記ギヤポジション検出手段の検出結果と前記出力軸の回転方向とに基づき前記入力軸の回転方向を判定することを特徴とする。
【発明の効果】
【0009】
請求項1の発明によれば、入力軸の回転方向が内燃機関の回転方向と逆方向である時に、ギヤ列のいずれかを係合状態とする前に、ギヤ列を無係合状態としてクラッチを接合して、内燃機関の回転方向と入力軸の回転方向とを一致させている。
【0010】
従って、ギヤ列の無係合状態でクラッチを接合して、内燃機関の回転方向と入力軸の回転方向を合わせているので、例えばギヤを前進段に入れクラッチを切った状態で車両が後進しているような場合や、ギヤを後進段に入れクラッチを切った状態で車両が前進しているような場合などの入力軸が内燃機関の回転方向と逆方向に回転している時にシフト操作を行う場合であっても、ギヤ入れ時のギヤ鳴りを防止することができる。
【0011】
また、請求項2の発明によれば、回転同期制御時にクラッチを完全に接合するようにしているので、早期に入力軸の回転方向を内燃機関の回転方向と合わせることができ、ギヤ入れ時間を短縮することができる。
また、請求項3の発明によれば、入力軸の回転方向をギヤポジション検出手段の検出結果と出力軸の回転方向とに基づいて、入力軸の回転方向を判定するようにしているので、入力軸の回転方向を検出するためのセンサ類を設ける必要がないので、コストの増加を抑制しつつ、簡便に入力軸の回転方向を検出することができる。
【図面の簡単な説明】
【0012】
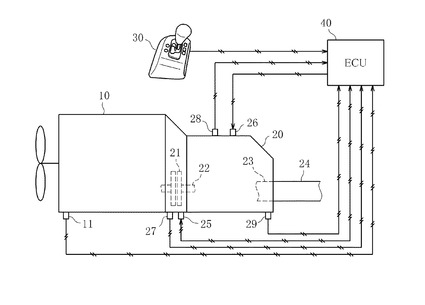
【図1】本発明に係る機械式自動変速装置の制御システムの概略構成図である。
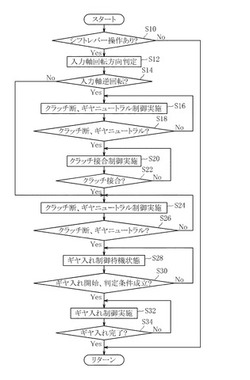
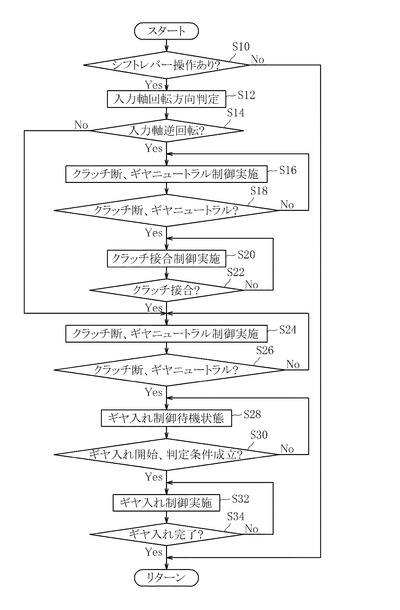
【図2】本発明の第1実施例に係るECUが実行するギヤ鳴り防止制御の制御フローチャートである。
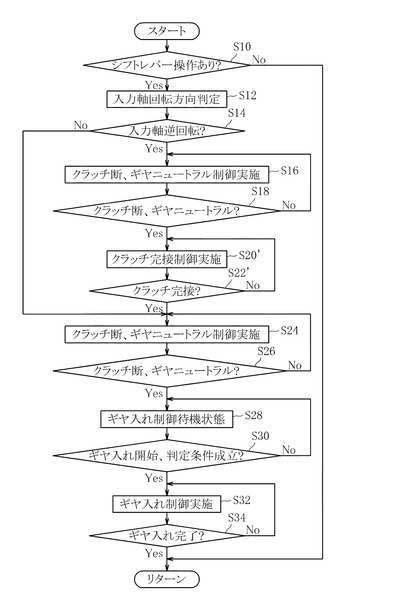
【図3】本発明の第2実施例に係るECUが実行するギヤ鳴り防止制御の制御フローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面に基づき説明する。
図1は、本発明の実施形態に係る図示しない機械式自動変速装置の制御システムの概略構成図である。以下、当該機械式自動変速装置の制御システムの構成を説明する。
【0014】
図1に示すように、機械式自動変速装置の制御システムは、図示しない車両に搭載され、大きく分けてエンジン(内燃機関)10、機械式自動変速機(変速手段)20、シフト操作部30及び電子コントロールユニット(以下、ECUという)(制御手段)40から構成される。なお、それぞれの構成要素は、電気的に接続されている。
【0015】
エンジン10は、運転者の図示しないアクセルペダルの操作量に応じて動力を発生するものである。また、エンジン10には、エンジン10の回転速度を検出するクランク角センサ(第1の回転速度検出手段)11が設けられている。
【0016】
機械式自動変速機20は、エンジン10で発生した動力を車速に合わせて変速し増幅させ、動力を図示しないタイヤへ伝達をするものである。また、機械式自動変速機20には、クラッチ21、入力軸22、出力軸23、プロペラシャフト24、クラッチ操作部25、変速部26、クラッチ回転センサ(第2の回転速度検出手段)27、ギヤポジションセンサ(ギヤポジション検出手段)28及び出力軸回転センサ(第3の回転速度検出手段)29を備えている。
【0017】
クラッチ21は、エンジン10と入力軸22との間に介装され、エンジン10で発生した動力を入力軸22へ伝達又は遮断するものである。
プロペラシャフト24は、出力軸23に接続され、変速された動力をタイヤに伝達するものである。
【0018】
クラッチ操作部25は、アクチュエータ等で構成され、クラッチ21の断接を行うものである。また、クラッチ操作部25には、クラッチ21のストローク量を検出するストロークセンサが内蔵されている。
変速部26は、アクチュエータ等で構成され、アクチュエータ等で機械式自動変速機20内の図示しないシンクロ機構を作動させ、係合するギヤ列を変更するものである。
【0019】
クラッチ回転センサ27は、クラッチ21の回転速度を検出するものである。また、クラッチ21と機械式自動変速機20の入力軸22とは、入力軸22がスプライン等でクラッチ21に挿入され、同期して回転するのでクラッチ回転センサ27で入力軸22の回転速度の検出が可能である。
【0020】
ギヤポジションセンサ28は、機械式自動変速機20で選択されているギヤ列を検出するものである。
出力軸回転センサ29は、機械式自動変速機20の出力軸23の回転速度及び回転方向を検出するものである。
【0021】
シフト操作部30は、運転者が操作し、ECU40によるギヤ列の自動変速や、運転者のシフト操作部30の操作による任意のギヤ列を選択可能とするものである。
ECU40は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される。
【0022】
ECU40の入力側には、クランク角センサ11、クラッチ回転センサ27、ギヤポジションセンサ28及び出力軸回転センサ29等のセンサ類及びシフト操作部30に備えられるセンサ類が電気的に接続されており、これら各種センサ類からの検出情報が入力される。
一方、ECU40の出力側には、クラッチ操作部25及び変速部26が電気的に接続されている。
【0023】
ECU40は、これら各種センサ類にて検出する検出情報より、運転者のシフト操作部30の操作状況や、車両の車速等を判別し、クラッチ操作部25及び変速部26を制御して機械式自動変速機20の変速を行う。
[第1実施例]
【0024】
以下、このように構成された本発明の第1実施例に係る機械式自動変速装置の制御システムにおける入力軸22の逆回転時のギヤ鳴り防止制御について説明する。
図2は、ECU40が実行するギヤ鳴り防止制御の制御フローチャートである。
【0025】
図2に示すように、ステップS10では、シフトレバー操作があるか、否かを判別する。詳しくは、運転者がシフト操作部30のシフトレバーを操作して、ギヤ列を前進或いは後進へ操作したか、否かを判別する。判別結果が真(Yes)で運転者がシフトレバーを操作して、ギヤ列を前進或いは後進へ操作していれば、ステップS12に進む。また、判別結果が偽(No)で運転者がシフトレバーを操作して、ギヤ列を前進或いは後進へ操作していなければ、当該ルーチンを抜ける。
【0026】
ステップS12では、入力軸22の回転方向を判定する。詳しくは、ギヤポジションセンサ28にて検出される現在のギヤ列と、出力軸回転センサ29にて検出される出力軸23の回転方向とに基づいて判定される。例えば、いずれかの前進段のギヤポジションが選択され、出力軸23の回転が車両の後進方向に回転しているような場合には、入力軸22の回転方向はエンジン10の回転方向の逆方向への回転となる。また、後進段のギヤポジションが選択され、出力軸23の回転が車両の前進方向に回転しているような場合でも、同様に入力軸22の回転方向はエンジン10の回転方向の逆方向への回転となる。このように、ギヤポジションがいずれかの前進段で出力軸23の回転方向がエンジンの回転方向の逆方向である場合や、ギヤポジションが後進段で出力軸23がエンジンの回転方向と同方向である場合に入力軸22の回転方向がエンジン10の回転方向と逆方向であると判定する。そして、ステップS14に進む。
【0027】
ステップS14では、ステップS12で判定した入力軸22の回転方向がエンジン10の回転方向の逆方向であるか、否かを判別する。判別結果が真(Yes)で入力軸22の回転方向がエンジン10の回転方向の逆方向であれば、ステップS16に進む。また、判別結果が偽(No)で入力軸22の回転方向がエンジン10の回転方向の逆方向でなければ、ステップS24に進む。
【0028】
ステップS16では、クラッチ断、ギヤニュートラル制御を実施する。詳しくはクラッチ操作部25を作動させクラッチ21を切断し、変速部23を作動させギヤポジションをいずれのギヤ列とも係合していないギヤニュートラルにする。そして、ステップS18に進む。
【0029】
ステップS18では、クラッチ21が切断され、ギヤニュートラルとなったか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21の切断を、ギヤポジションセンサ28にて検出されるギヤポジションに基づきギヤニュートラルとなったか、否かを判別する。判別結果が真(Yes)でクラッチ21が切断され、ギヤニュートラルとなっていれば、ステップS20に進む。また、判別結果が偽(No)でクラッチ21が切断され、ギヤニュートラルとなっていなければ、ステップS16へ戻る。
【0030】
ステップS20では、クラッチ接合制御を実施する。詳しくは、ギヤニュートラル状態で、クラッチ操作部25を作動させクラッチ21を接合させる。そして、ステップ22に進む。
ステップS22では、クラッチ21が接合したか、否かを判別する。詳しくは、クランク角センサ11にて検出されるエンジン回転速度とクラッチ回転センサ27にて検出される入力軸回転速度との差の絶対値が第1の所定値以下か、否かを判別する。判別結果が真(Yes)でエンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値以下であれば、クラッチ21が接合していると判定してステップS24に進む。また、判別結果が偽(No)でエンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値より大きければ、クラッチ21が接合していないと判定してステップS20へ戻る。
【0031】
ステップS24では、クラッチ断、ギヤニュートラル制御を実施する。詳しくはステップS16と同様に、クラッチ操作部25を作動させクラッチ21を切断し、変速部26を作動させギヤポジションをいずれのギヤ列とも係合していないギヤニュートラルにする。そして、ステップS26に進む。
【0032】
ステップS26では、クラッチ21が切断され、ギヤニュートラルとなったか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21の切断を、ギヤポジションセンサ28にて検出されるギヤポジションに基づきギヤニュートラルとなったか、否かを判別する。判別結果が真(Yes)でクラッチ21が切断され、ギヤニュートラルとなっていれば、ステップS28に進む。また、判別結果が偽(No)でクラッチ21が切断され、ギヤニュートラルとなっていなければ、ステップS24へ戻る。
【0033】
ステップS28では、ギヤ入れ制御待機状態にする。詳しくは、ギヤ入れ可能と判別されるまでギヤ入れを待機する。そして、ステップS30に進む。
ステップS30では、ギヤ入れ開始判定条件が成立したか、否かを判別する。詳しくは、クラッチ回転センサ27にて検出される入力軸22の回転速度と出力軸回転センサにて検出される出力軸23の回転速度に運転者が指定したギヤ列のギヤ比を乗算して求められる出力軸23の補正回転速度との差の絶対値が第2の所定値以下であるか、否かを判別する。判別結果が真(Yes)で入力軸22の回転速度と出力軸23の補正回転速度との差の絶対値が第2の所定値以下であれば、ステップS32に進む。また、判別結果が偽(No)で入力軸22の回転速度と出力軸23の補正回転速度との差の絶対値が第2の所定値より大きければ、ステップS28へ戻る。
【0034】
ステップS32では、ギヤ入れ制御を実施する。詳しくは、変速部26を作動させ、ギヤを運転者が指定したギヤ列に入れる。そして、ステップS34に進む。
ステップS34では、ギヤ入れが完了したか、否かを判別する。詳しくは、ギヤポジションセンサ28の検出結果に基づき、ギヤ入れが完了したか、否かを判別する。判別結果が真(Yes)でギヤ入れが完了していれば、本ルーチンをリターンする。また、判別結果が偽(No)でギヤ入れが完了していなければ、ステップS32へ戻る。
【0035】
このように、本発明の第1実施例に係る機械式自動変速装置の制御システムによれば、入力軸22の回転方向がエンジン10の回転方向と逆方向であると判定されると、クラッチ21を切断し、ギヤニュートラルとした後にクラッチ21を接合する。そして、エンジン10の回転速度と入力軸22の回転速度との差が第1の所定値以下となれば、クラッチ21を再度切断した後にギヤ入れを実施している。
【0036】
従って、ギヤニュートラルでクラッチ21を接合して、エンジン10の回転方向と入力軸22の回転方向を合わせているので、例えば、登坂路などでギヤを前進段に入れクラッチ21を切った状態で車両が後進しているような場合や、降坂路などでギヤを後進段に入れクラッチ21を切った状態で車両が前進しているような場合などの入力軸22がエンジン10の回転方向と逆方向に回転している時に運転者がシフト操作を行っても、入力軸22とエンジン10との回転方向が同じなのでギヤ入れ時のギヤ鳴りを防止することができる。
【0037】
また、入力軸22の回転方向をギヤポジションセンサ28の検出結果と出力軸回転センサ27にて検出される出力軸23の回転方向とに基づいて、入力軸22の回転方向を判定するようにしているので、入力軸22の回転方向を検出するためのセンサ類を設ける必要がなく、コストの増加を抑制しつつ、簡便に入力軸22の回転方向を検出することができる。
[第2実施例]
【0038】
以下、本発明の第2実施例に係る機械式自動変速装置の制御システムについて説明する。
第2実施例では、上記第1実施例に対して、ステップS20’とS22’での入力軸22をエンジン10の回転方向と合わせる時のクラッチ接合の判定方法を変更しており、以下に上記第1実施例との相違点について説明する。
【0039】
図3は、ECU40が実行するギヤ鳴り防止制御の制御フローチャートである。
図3に示すように、ステップS10からステップS18までは、第1実施例と同様に入力軸22の回転方向を判別し、クラッチ21を切断し、ギヤをギヤニュートラルにする。
そして、ステップS20’では、クラッチ完接制御を実施する。詳しくは、ギヤニュートラル状態で、クラッチ操作部25を作動させクラッチ21を完全に接合させる。そして、ステップ22に進む。
【0040】
ステップS22’では、クラッチ21が完接したか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21が完接したか、否かを判別する。判別結果が真(Yes)でクラッチ21が完接していれば、ステップS24に進む。また、判別結果が偽(No)でクラッチ21が完接していなければ、ステップS20’へ戻る。
【0041】
そして、ステップS24からS34までは、第1実施例と同様に、ギヤ入れの制御を実施する。
このように、本発明の第2実施例に係る機械式自動変速装置の制御システムによれば、入力軸22とエンジン10の回転方向と合わせる時にクラッチ21を完全に接合するようにしているので、早期に入力軸22の回転方向をエンジン10の回転方向と合わせることができ、ギヤ入れ期間を短縮することができる。
【0042】
以上で発明の実施形態の説明を終えるが、本発明の形態は実施形態に限定されるものではない。
例えば、本実施形態は、入力軸22の回転方向をギヤポジションと出力軸23の回転方向に基づき決定するようにしているが、これに限定するものではなく、入力軸22の回転方向を検出するセンサを設けても良い。
【符号の説明】
【0043】
10 エンジン(内燃機関)
11 クランク角センサ(第1の回転速度検出手段)
20 機械式自動変速機(変速手段)
21 クラッチ
22 入力軸
23 出力軸
25 クラッチ操作部
26 変速部(切換手段)
27 クラッチ回転センサ(第2の回転速度検出手段)
28 ギヤポジションセンサ(ギヤポジション検出手段)
29 出力軸回転センサ(第3の回転速度検出手段)
30 シフト操作部
40 ECU(制御手段)
【技術分野】
【0001】
本発明は、機械式自動変速装置の制御システムに関し、詳しくは、入力軸が逆回転での制御に関する。
【背景技術】
【0002】
車両の変速装置として、手動変速装置における変速機の操作(セレクト及びシフト)及びクラッチの断接をアクチュエータにより作動させることで自動変速を可能とする機械式自動変速装置が知られている。当該機械式自動変速装置は、例えば、特許文献1のように、変速時に変速装置のエンジンから駆動力が入力される入力軸と変速された駆動力を車軸に出力する出力軸の回転速度を検出し、入力軸回転速度と出力軸回転速度に目標変速ギヤ列のギヤ比を乗算して求められる目標回転速度(目標ギヤ入れ回転速度)との差が所定回転速度範囲内にあるときにギヤ入れを行うようにし、変速時のギヤ鳴りの防止、延いてはシンクロ機構を保護するようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−76841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
変速装置は、例えば、登坂路等の上り坂において、ギヤを前進段に入れクラッチを切った状態で車両が後進しているような場合や、降坂路等の下り坂において、ギヤを後進段に入れクラッチを切った状態で車両が前進しているような場合には、入力軸はエンジン回転方向とは反対の回転方向、所謂逆回転することになる。
【0005】
しかしながら、このような入力軸の回転方向がエンジン回転方向に対して逆回転するような状況において、上記特許文献1の変速装置では、入力軸の逆回転を検出することができず、入力軸の回転速度と目標回転速度との差が所定回転速度範囲内となると変速を行うので、入力軸の逆回転時にはギヤ入れした際にギヤ鳴りが発生することとなる。
【0006】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、入力軸が逆回転するような状況にでもギヤ鳴りの発生を防止することのできる機械式自動変速装置の制御システムを提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、請求項1の機械式自動変速装置の制御システムでは、車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記内燃機関から入力される動力を増減速し出力する変速手段と、前記内燃機関の回転速度を検出する第1の回転速度検出手段と、前記入力軸の回転速度を検出する第2の回転速度検出手段と、前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、前記制御手段は、前記入力軸の回転方向が前記内燃機関の回転方向と逆方向である時に、前記ギヤ列のいずれかを係合状態とする前に、前記ギヤ列を無係合状態とし前記クラッチを接合して前記内燃機関の回転方向と前記入力軸の回転方向とを一致させる回転同期制御を行うことを特徴とする。
【0008】
また、請求項2の機械式自動変速装置の制御システムでは、請求項1において、前記回転同期制御時の前記クラッチの接合は、完全に接合させることを特徴とする。
また、請求項3の機械式自動変速装置の制御システムでは、請求項1或いは2において、ギヤポジションを検出するギヤポジション検出手段と、前記出力軸の回転方向と回転速度を検出する第3の回転検出手段と、を備え、前記制御手段は、前記ギヤポジション検出手段の検出結果と前記出力軸の回転方向とに基づき前記入力軸の回転方向を判定することを特徴とする。
【発明の効果】
【0009】
請求項1の発明によれば、入力軸の回転方向が内燃機関の回転方向と逆方向である時に、ギヤ列のいずれかを係合状態とする前に、ギヤ列を無係合状態としてクラッチを接合して、内燃機関の回転方向と入力軸の回転方向とを一致させている。
【0010】
従って、ギヤ列の無係合状態でクラッチを接合して、内燃機関の回転方向と入力軸の回転方向を合わせているので、例えばギヤを前進段に入れクラッチを切った状態で車両が後進しているような場合や、ギヤを後進段に入れクラッチを切った状態で車両が前進しているような場合などの入力軸が内燃機関の回転方向と逆方向に回転している時にシフト操作を行う場合であっても、ギヤ入れ時のギヤ鳴りを防止することができる。
【0011】
また、請求項2の発明によれば、回転同期制御時にクラッチを完全に接合するようにしているので、早期に入力軸の回転方向を内燃機関の回転方向と合わせることができ、ギヤ入れ時間を短縮することができる。
また、請求項3の発明によれば、入力軸の回転方向をギヤポジション検出手段の検出結果と出力軸の回転方向とに基づいて、入力軸の回転方向を判定するようにしているので、入力軸の回転方向を検出するためのセンサ類を設ける必要がないので、コストの増加を抑制しつつ、簡便に入力軸の回転方向を検出することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る機械式自動変速装置の制御システムの概略構成図である。
【図2】本発明の第1実施例に係るECUが実行するギヤ鳴り防止制御の制御フローチャートである。
【図3】本発明の第2実施例に係るECUが実行するギヤ鳴り防止制御の制御フローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面に基づき説明する。
図1は、本発明の実施形態に係る図示しない機械式自動変速装置の制御システムの概略構成図である。以下、当該機械式自動変速装置の制御システムの構成を説明する。
【0014】
図1に示すように、機械式自動変速装置の制御システムは、図示しない車両に搭載され、大きく分けてエンジン(内燃機関)10、機械式自動変速機(変速手段)20、シフト操作部30及び電子コントロールユニット(以下、ECUという)(制御手段)40から構成される。なお、それぞれの構成要素は、電気的に接続されている。
【0015】
エンジン10は、運転者の図示しないアクセルペダルの操作量に応じて動力を発生するものである。また、エンジン10には、エンジン10の回転速度を検出するクランク角センサ(第1の回転速度検出手段)11が設けられている。
【0016】
機械式自動変速機20は、エンジン10で発生した動力を車速に合わせて変速し増幅させ、動力を図示しないタイヤへ伝達をするものである。また、機械式自動変速機20には、クラッチ21、入力軸22、出力軸23、プロペラシャフト24、クラッチ操作部25、変速部26、クラッチ回転センサ(第2の回転速度検出手段)27、ギヤポジションセンサ(ギヤポジション検出手段)28及び出力軸回転センサ(第3の回転速度検出手段)29を備えている。
【0017】
クラッチ21は、エンジン10と入力軸22との間に介装され、エンジン10で発生した動力を入力軸22へ伝達又は遮断するものである。
プロペラシャフト24は、出力軸23に接続され、変速された動力をタイヤに伝達するものである。
【0018】
クラッチ操作部25は、アクチュエータ等で構成され、クラッチ21の断接を行うものである。また、クラッチ操作部25には、クラッチ21のストローク量を検出するストロークセンサが内蔵されている。
変速部26は、アクチュエータ等で構成され、アクチュエータ等で機械式自動変速機20内の図示しないシンクロ機構を作動させ、係合するギヤ列を変更するものである。
【0019】
クラッチ回転センサ27は、クラッチ21の回転速度を検出するものである。また、クラッチ21と機械式自動変速機20の入力軸22とは、入力軸22がスプライン等でクラッチ21に挿入され、同期して回転するのでクラッチ回転センサ27で入力軸22の回転速度の検出が可能である。
【0020】
ギヤポジションセンサ28は、機械式自動変速機20で選択されているギヤ列を検出するものである。
出力軸回転センサ29は、機械式自動変速機20の出力軸23の回転速度及び回転方向を検出するものである。
【0021】
シフト操作部30は、運転者が操作し、ECU40によるギヤ列の自動変速や、運転者のシフト操作部30の操作による任意のギヤ列を選択可能とするものである。
ECU40は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される。
【0022】
ECU40の入力側には、クランク角センサ11、クラッチ回転センサ27、ギヤポジションセンサ28及び出力軸回転センサ29等のセンサ類及びシフト操作部30に備えられるセンサ類が電気的に接続されており、これら各種センサ類からの検出情報が入力される。
一方、ECU40の出力側には、クラッチ操作部25及び変速部26が電気的に接続されている。
【0023】
ECU40は、これら各種センサ類にて検出する検出情報より、運転者のシフト操作部30の操作状況や、車両の車速等を判別し、クラッチ操作部25及び変速部26を制御して機械式自動変速機20の変速を行う。
[第1実施例]
【0024】
以下、このように構成された本発明の第1実施例に係る機械式自動変速装置の制御システムにおける入力軸22の逆回転時のギヤ鳴り防止制御について説明する。
図2は、ECU40が実行するギヤ鳴り防止制御の制御フローチャートである。
【0025】
図2に示すように、ステップS10では、シフトレバー操作があるか、否かを判別する。詳しくは、運転者がシフト操作部30のシフトレバーを操作して、ギヤ列を前進或いは後進へ操作したか、否かを判別する。判別結果が真(Yes)で運転者がシフトレバーを操作して、ギヤ列を前進或いは後進へ操作していれば、ステップS12に進む。また、判別結果が偽(No)で運転者がシフトレバーを操作して、ギヤ列を前進或いは後進へ操作していなければ、当該ルーチンを抜ける。
【0026】
ステップS12では、入力軸22の回転方向を判定する。詳しくは、ギヤポジションセンサ28にて検出される現在のギヤ列と、出力軸回転センサ29にて検出される出力軸23の回転方向とに基づいて判定される。例えば、いずれかの前進段のギヤポジションが選択され、出力軸23の回転が車両の後進方向に回転しているような場合には、入力軸22の回転方向はエンジン10の回転方向の逆方向への回転となる。また、後進段のギヤポジションが選択され、出力軸23の回転が車両の前進方向に回転しているような場合でも、同様に入力軸22の回転方向はエンジン10の回転方向の逆方向への回転となる。このように、ギヤポジションがいずれかの前進段で出力軸23の回転方向がエンジンの回転方向の逆方向である場合や、ギヤポジションが後進段で出力軸23がエンジンの回転方向と同方向である場合に入力軸22の回転方向がエンジン10の回転方向と逆方向であると判定する。そして、ステップS14に進む。
【0027】
ステップS14では、ステップS12で判定した入力軸22の回転方向がエンジン10の回転方向の逆方向であるか、否かを判別する。判別結果が真(Yes)で入力軸22の回転方向がエンジン10の回転方向の逆方向であれば、ステップS16に進む。また、判別結果が偽(No)で入力軸22の回転方向がエンジン10の回転方向の逆方向でなければ、ステップS24に進む。
【0028】
ステップS16では、クラッチ断、ギヤニュートラル制御を実施する。詳しくはクラッチ操作部25を作動させクラッチ21を切断し、変速部23を作動させギヤポジションをいずれのギヤ列とも係合していないギヤニュートラルにする。そして、ステップS18に進む。
【0029】
ステップS18では、クラッチ21が切断され、ギヤニュートラルとなったか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21の切断を、ギヤポジションセンサ28にて検出されるギヤポジションに基づきギヤニュートラルとなったか、否かを判別する。判別結果が真(Yes)でクラッチ21が切断され、ギヤニュートラルとなっていれば、ステップS20に進む。また、判別結果が偽(No)でクラッチ21が切断され、ギヤニュートラルとなっていなければ、ステップS16へ戻る。
【0030】
ステップS20では、クラッチ接合制御を実施する。詳しくは、ギヤニュートラル状態で、クラッチ操作部25を作動させクラッチ21を接合させる。そして、ステップ22に進む。
ステップS22では、クラッチ21が接合したか、否かを判別する。詳しくは、クランク角センサ11にて検出されるエンジン回転速度とクラッチ回転センサ27にて検出される入力軸回転速度との差の絶対値が第1の所定値以下か、否かを判別する。判別結果が真(Yes)でエンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値以下であれば、クラッチ21が接合していると判定してステップS24に進む。また、判別結果が偽(No)でエンジン回転速度と入力軸回転速度との差の絶対値が第1の所定値より大きければ、クラッチ21が接合していないと判定してステップS20へ戻る。
【0031】
ステップS24では、クラッチ断、ギヤニュートラル制御を実施する。詳しくはステップS16と同様に、クラッチ操作部25を作動させクラッチ21を切断し、変速部26を作動させギヤポジションをいずれのギヤ列とも係合していないギヤニュートラルにする。そして、ステップS26に進む。
【0032】
ステップS26では、クラッチ21が切断され、ギヤニュートラルとなったか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21の切断を、ギヤポジションセンサ28にて検出されるギヤポジションに基づきギヤニュートラルとなったか、否かを判別する。判別結果が真(Yes)でクラッチ21が切断され、ギヤニュートラルとなっていれば、ステップS28に進む。また、判別結果が偽(No)でクラッチ21が切断され、ギヤニュートラルとなっていなければ、ステップS24へ戻る。
【0033】
ステップS28では、ギヤ入れ制御待機状態にする。詳しくは、ギヤ入れ可能と判別されるまでギヤ入れを待機する。そして、ステップS30に進む。
ステップS30では、ギヤ入れ開始判定条件が成立したか、否かを判別する。詳しくは、クラッチ回転センサ27にて検出される入力軸22の回転速度と出力軸回転センサにて検出される出力軸23の回転速度に運転者が指定したギヤ列のギヤ比を乗算して求められる出力軸23の補正回転速度との差の絶対値が第2の所定値以下であるか、否かを判別する。判別結果が真(Yes)で入力軸22の回転速度と出力軸23の補正回転速度との差の絶対値が第2の所定値以下であれば、ステップS32に進む。また、判別結果が偽(No)で入力軸22の回転速度と出力軸23の補正回転速度との差の絶対値が第2の所定値より大きければ、ステップS28へ戻る。
【0034】
ステップS32では、ギヤ入れ制御を実施する。詳しくは、変速部26を作動させ、ギヤを運転者が指定したギヤ列に入れる。そして、ステップS34に進む。
ステップS34では、ギヤ入れが完了したか、否かを判別する。詳しくは、ギヤポジションセンサ28の検出結果に基づき、ギヤ入れが完了したか、否かを判別する。判別結果が真(Yes)でギヤ入れが完了していれば、本ルーチンをリターンする。また、判別結果が偽(No)でギヤ入れが完了していなければ、ステップS32へ戻る。
【0035】
このように、本発明の第1実施例に係る機械式自動変速装置の制御システムによれば、入力軸22の回転方向がエンジン10の回転方向と逆方向であると判定されると、クラッチ21を切断し、ギヤニュートラルとした後にクラッチ21を接合する。そして、エンジン10の回転速度と入力軸22の回転速度との差が第1の所定値以下となれば、クラッチ21を再度切断した後にギヤ入れを実施している。
【0036】
従って、ギヤニュートラルでクラッチ21を接合して、エンジン10の回転方向と入力軸22の回転方向を合わせているので、例えば、登坂路などでギヤを前進段に入れクラッチ21を切った状態で車両が後進しているような場合や、降坂路などでギヤを後進段に入れクラッチ21を切った状態で車両が前進しているような場合などの入力軸22がエンジン10の回転方向と逆方向に回転している時に運転者がシフト操作を行っても、入力軸22とエンジン10との回転方向が同じなのでギヤ入れ時のギヤ鳴りを防止することができる。
【0037】
また、入力軸22の回転方向をギヤポジションセンサ28の検出結果と出力軸回転センサ27にて検出される出力軸23の回転方向とに基づいて、入力軸22の回転方向を判定するようにしているので、入力軸22の回転方向を検出するためのセンサ類を設ける必要がなく、コストの増加を抑制しつつ、簡便に入力軸22の回転方向を検出することができる。
[第2実施例]
【0038】
以下、本発明の第2実施例に係る機械式自動変速装置の制御システムについて説明する。
第2実施例では、上記第1実施例に対して、ステップS20’とS22’での入力軸22をエンジン10の回転方向と合わせる時のクラッチ接合の判定方法を変更しており、以下に上記第1実施例との相違点について説明する。
【0039】
図3は、ECU40が実行するギヤ鳴り防止制御の制御フローチャートである。
図3に示すように、ステップS10からステップS18までは、第1実施例と同様に入力軸22の回転方向を判別し、クラッチ21を切断し、ギヤをギヤニュートラルにする。
そして、ステップS20’では、クラッチ完接制御を実施する。詳しくは、ギヤニュートラル状態で、クラッチ操作部25を作動させクラッチ21を完全に接合させる。そして、ステップ22に進む。
【0040】
ステップS22’では、クラッチ21が完接したか、否かを判別する。詳しくは、クラッチ操作部25にて検出されるクラッチストロークに基づきクラッチ21が完接したか、否かを判別する。判別結果が真(Yes)でクラッチ21が完接していれば、ステップS24に進む。また、判別結果が偽(No)でクラッチ21が完接していなければ、ステップS20’へ戻る。
【0041】
そして、ステップS24からS34までは、第1実施例と同様に、ギヤ入れの制御を実施する。
このように、本発明の第2実施例に係る機械式自動変速装置の制御システムによれば、入力軸22とエンジン10の回転方向と合わせる時にクラッチ21を完全に接合するようにしているので、早期に入力軸22の回転方向をエンジン10の回転方向と合わせることができ、ギヤ入れ期間を短縮することができる。
【0042】
以上で発明の実施形態の説明を終えるが、本発明の形態は実施形態に限定されるものではない。
例えば、本実施形態は、入力軸22の回転方向をギヤポジションと出力軸23の回転方向に基づき決定するようにしているが、これに限定するものではなく、入力軸22の回転方向を検出するセンサを設けても良い。
【符号の説明】
【0043】
10 エンジン(内燃機関)
11 クランク角センサ(第1の回転速度検出手段)
20 機械式自動変速機(変速手段)
21 クラッチ
22 入力軸
23 出力軸
25 クラッチ操作部
26 変速部(切換手段)
27 クラッチ回転センサ(第2の回転速度検出手段)
28 ギヤポジションセンサ(ギヤポジション検出手段)
29 出力軸回転センサ(第3の回転速度検出手段)
30 シフト操作部
40 ECU(制御手段)
【特許請求の範囲】
【請求項1】
車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記内燃機関から入力される動力を増減速し出力する変速手段と、
前記内燃機関の回転速度を検出する第1の回転速度検出手段と、
前記入力軸の回転速度を検出する第2の回転速度検出手段と、
前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記入力軸の回転方向が前記内燃機関の回転方向と逆方向である時に、前記ギヤ列のいずれかを係合状態とする前に、前記ギヤ列を無係合状態とし前記クラッチを接合して前記内燃機関の回転方向と前記入力軸の回転方向とを一致させる回転同期制御を行うことを特徴とする機械式自動変速装置の制御システム。
【請求項2】
前記回転同期制御時の前記クラッチの接合は、完全に接合させることを特徴とする、請求項1に記載の機械式自動変速装置の制御システム。
【請求項3】
ギヤポジションを検出するギヤポジション検出手段と、
前記出力軸の回転方向と回転速度を検出する第3の回転検出手段と、を備え、
前記制御手段は、前記ギヤポジション検出手段の検出結果と前記出力軸の回転方向とに基づき前記入力軸の回転方向を判定することを特徴とする、請求項1或いは2に記載の機械式自動変速装置の制御システム。
【請求項1】
車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記内燃機関から入力される動力を増減速し出力する変速手段と、
前記内燃機関の回転速度を検出する第1の回転速度検出手段と、
前記入力軸の回転速度を検出する第2の回転速度検出手段と、
前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記入力軸の回転方向が前記内燃機関の回転方向と逆方向である時に、前記ギヤ列のいずれかを係合状態とする前に、前記ギヤ列を無係合状態とし前記クラッチを接合して前記内燃機関の回転方向と前記入力軸の回転方向とを一致させる回転同期制御を行うことを特徴とする機械式自動変速装置の制御システム。
【請求項2】
前記回転同期制御時の前記クラッチの接合は、完全に接合させることを特徴とする、請求項1に記載の機械式自動変速装置の制御システム。
【請求項3】
ギヤポジションを検出するギヤポジション検出手段と、
前記出力軸の回転方向と回転速度を検出する第3の回転検出手段と、を備え、
前記制御手段は、前記ギヤポジション検出手段の検出結果と前記出力軸の回転方向とに基づき前記入力軸の回転方向を判定することを特徴とする、請求項1或いは2に記載の機械式自動変速装置の制御システム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−24347(P2013−24347A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−160929(P2011−160929)
【出願日】平成23年7月22日(2011.7.22)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月22日(2011.7.22)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
[ Back to top ]