
機械式自動変速装置の制御システム
【課題】本発明は、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供する。
【解決手段】エンジントルク算出部(31)にて、エンジン(10)の回転速度と吸入空気量と、燃料噴射量とに基づいてエンジントルクTegを算出する。また、回転変化量算出部(32)にて、回転速度変化量aegを算出する。そして、クラッチトルク算出部(33)にて、エンジントルクTegと回転速度変化量aegとエンジン慣性モーメントIegと式(1)に基づいて、クラッチトルクTclを算出する。次に、クラッチストローク算出部(34)にて、クラッチトルクTclとクラッチストロークSclとの関係を示すマップよりクラッチストロークSclを算出し、クラッチ操作部(25)をクラッチストロークSclとなるように作動させる。
【解決手段】エンジントルク算出部(31)にて、エンジン(10)の回転速度と吸入空気量と、燃料噴射量とに基づいてエンジントルクTegを算出する。また、回転変化量算出部(32)にて、回転速度変化量aegを算出する。そして、クラッチトルク算出部(33)にて、エンジントルクTegと回転速度変化量aegとエンジン慣性モーメントIegと式(1)に基づいて、クラッチトルクTclを算出する。次に、クラッチストローク算出部(34)にて、クラッチトルクTclとクラッチストロークSclとの関係を示すマップよりクラッチストロークSclを算出し、クラッチ操作部(25)をクラッチストロークSclとなるように作動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、機械式自動変速装置の制御システムに関し、詳しくは、変速時のクラッチ制御に関する。
【背景技術】
【0002】
車両の変速装置として、手動変速装置における変速機の操作(セレクト及びシフト)及びクラッチの断接をアクチュエータにより作動させることで自動変速を可能とする機械式自動変速装置が知られている。当該自動変速装置では、変速時にクラッチを切断するとエンジンの動力が突然切断されることにより、ショックが発生することがある。
【0003】
したがって、自動変速装置では、例えば、特許文献1のようにエンジントルクを無負荷状態にしてクラッチを切断したり、特許文献2のようにエンジントルクに応じてクラッチを切断する速度を変化させたり、特許文献3のように車両の加速度が0となるようにエンジントルクを制御した後にクラッチを切断したりすることで、クラッチ切断時のエンジンの動力の切断によるトルク変動を低減して変速時のショックを低減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−211945号公報
【特許文献2】特許第3752959号公報
【特許文献3】特許第3417823号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献の自動変速装置は、エンジントルクに基づいてクラッチの切断を制御しており、クラッチから駆動輪までの駆動系部品に掛かる負荷を考慮していない。
【0006】
したがって、クラッチの切断に伴い、クラッチ以降の駆動系部品に掛かるエンジン側の慣性が急激に無くなることにより、駆動系部品の負荷が急激に開放され、駆動系部品の回転(例えば、クラッチ回転数)が大きく乱れることとなり、延いては、変速時のショックが発生することとなり好ましいことではない。
【0007】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1の機械式自動変速装置の制御システムでは、車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記複数の切換手段を作動させ前記内燃機関から入力される動力を増減速し出力する変速手段と、前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、前記制御手段は、前記ギヤ列の係合状態の切り換え時に、前記クラッチに掛かる負荷である駆動系負荷が0であるときに前記クラッチを切断するように前記クラッチを操作することを特徴とする。
【0009】
また、請求項2の機械式自動変速装置の制御システムでは、請求項1において、前記内燃機関の運転状態を検出する運転状態検出手段を備え、前記制御手段は、前記運転状態検出手段にて検出される前記内燃機関の出力トルクと、予め設定される前記内燃機関の慣性モーメントと、前記運転状態検出手段にて検出される前記内燃機関の回転速度変化量とに基づいて前記駆動系負荷を算出することを特徴とする。
【0010】
また、請求項3の機械式自動変速装置の制御システムでは、請求項1或いは2において、前記車両の走行状態を検出する走行状態検出手段を備え、前記制御手段は、前記駆動系負荷と前記クラッチストロークとの関係をマップ管理し、前記走行状態検出手段にて検出される前記車両の走行状態に基づき前記マップを補正し、補正後の前記マップに基づき前記クラッチストロークを算出することを特徴とする。
【発明の効果】
【0011】
請求項1の発明によれば、ギヤ列の係合状態の切り換え時に、駆動系負荷が0であるときにクラッチを切断するようにクラッチの操作を行っている。
このように、駆動系負荷が0であるときにクラッチ操作を行うことにより、内燃機関が無負荷でのクラッチの切断に伴うクラッチより駆動輪側の駆動系部品に掛かる内燃機関側から伝達される力(慣性力など)の急激な減少を防止でき、駆動系部品の負荷が急激に開放されることを防止することができる。
【0012】
したがって、駆動系部品の回転(例えば、クラッチ回転数)が大きく乱れることを防止できるので、変速時のショックの発生を防止することができる。
また、請求項2の発明によれば、駆動系負荷を内燃機関の出力トルクと、内燃機関の慣性モーメントと、内燃機関の回転速度変化量とに基づいて算出しており、駆動系負荷を検出するセンサ類を設ける必要がないので、コスト増加を抑制しつつ、正確に駆動系負荷を算出することができる。
【0013】
また、請求項3の発明によれば、クラッチストローク量を走行状態検出手段にて検出される車両の走行状態に基づき補正される駆動系負荷とクラッチストロークのマップより算出するようにしており、例えば車両の走行距離が延びクラッチが劣化しているような場合でも、クラッチの劣化を考慮してクラッチストロークを正確に算出することができる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る機械式自動変速装置の制御システムの概略構成図である。
【図2】本発明に係る機械式自動変速装置の制御システムのクラッチ作動制御手順を示す制御ブロック図である。
【図3】本発明に係る機械式自動変速装置の制御システムのトルクとクラッチストロークの変化を時系列で示す図である。
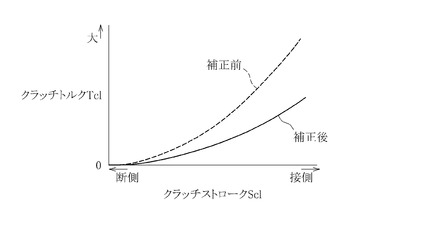
【図4】本発明に係る機械式自動変速装置の制御システムのクラッチトルクとクラッチストロークとの関係を示すマップである。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
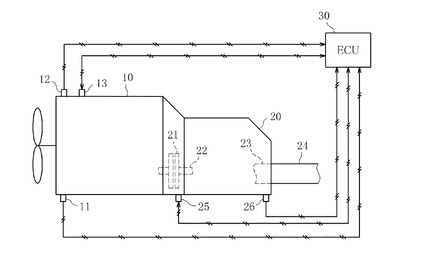
図1は、本発明の実施形態に係る図示しない機械式自動変速装置の制御システムの概略構成図である。以下、当該機械式自動変速装置の制御システムの構成を説明する。
【0016】
図1に示すように、機械式自動変速装置の制御システムは、図示しない車両に搭載され、大きく分けてエンジン(内燃機関)10、機械式自動変速機(変速手段)20、及び電子コントロールユニット(以下、ECUという)(制御手段)30から構成される。なお、それぞれの構成要素は、電気的に接続されている。
【0017】
エンジン10は、運転者の図示しないアクセルペダルの操作量に応じて動力を発生するものである。また、エンジン10には、エンジン10の回転速度を検出するクランク角センサ(運転状態検出手段)11、エンジン10の吸入空気量を検出するエアフローセンサ(運転状態検出手段)12及び燃料を噴射しエンジン10の出力を調整する燃料噴射弁(運転状態検出手段)13が設けられている。
【0018】
機械式自動変速機20は、図示しない複数の変速部(切換手段)を作動させ、ギヤ列の係合状態を切り換えてエンジン10で発生した動力を車速に合わせて変速し増幅させ、動力を図示しないタイヤへ伝達をするものである。また、機械式自動変速機20は、クラッチ21、入力軸22、出力軸23、プロペラシャフト24、クラッチ操作部25及び出力軸回転センサ(走行状態検出手段)26を備えている。
【0019】
クラッチ21は、エンジン10と入力軸22との間に介装され、エンジン10で発生した動力を入力軸22へ伝達又は遮断するものである。
プロペラシャフト24は、出力軸23に接続され、変速された動力をタイヤに伝達するものである。
【0020】
クラッチ操作部25は、アクチュエータ等で構成され、クラッチ21の断接を行うものである。また、クラッチ操作部25には、クラッチ21のストローク量を検出するストロークセンサが内蔵されている。
出力軸回転センサ26は、出力軸23の回転速度を検出するものであり、当該センサの検出信号と出力軸23以降のギヤ比(最終減速比)とタイヤ外周とに基づいて車両の車速の算出が可能となる。
【0021】
ECU30は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される。
ECU30の入力側には、クランク角センサ11、エアフローセンサ12、燃料噴射弁13、及びクラッチ操作部25等のセンサ類が電気的に接続されており、これら各種センサ類からの検出情報が入力される。
【0022】
一方、ECU30の出力側には、クラッチ操作部25が電気的に接続されている。
ECU30は、これら各種センサ類にて検出する検出情報より、車速等の車両の走行状態、エンジントルク等のエンジン10の運転状態を算出する。また、ECU30は、それら走行状態や運転状態や運転者の図示しないシフト操作部の操作状況を判別し、クラッチ操作部25及び変速部を制御して機械式自動変速機20の変速を行う。
【0023】
以下、このように構成された本発明に係る機械式自動変速装置の制御システムにおけるクラッチ21の作動制御について説明する。
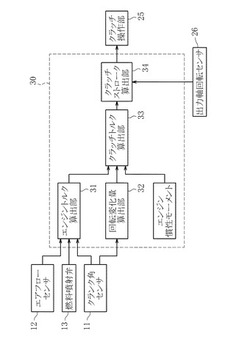
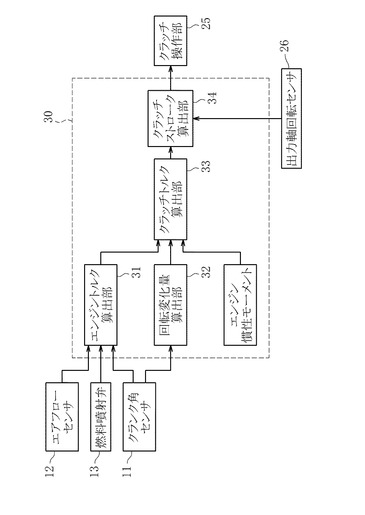
図2は、本発明に係る機械式自動変速装置の制御システムのクラッチ作動制御手順を示す制御ブロック図である。
【0024】
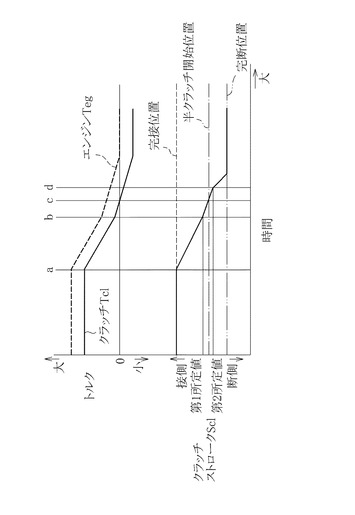
また。図3は、トルクとクラッチストロークの変化を時系列で示す図であり、図中太破線はエンジンが出力するトルクであるエンジントルクTegを、太実線はクラッチ21に加わるトルクであるクラッチトルク(駆動負荷)Tclを、細破線はクラッチ21が完全に接続する完接位置を、一点鎖線はクラッチ21が動力の伝達を開始する半クラッチ開始位置を、二点鎖線はクラッチ21が完全に切断する完断位置をそれぞれ示す。
【0025】
また、図4は、クラッチトルクTclとクラッチストロークSclとの関係を示すマップであり、図中破線は補正前を、実線は補正後をそれぞれ示す。当該補正前とは、クラッチ21の新品時のクラッチストロークSclに対する伝達可能なクラッチトルクTclである。また、補正後とは、車両の車速や走行距離等の走行状況によるクラッチ21の劣化度合いを考慮したクラッチストロークSclに対する伝達可能なクラッチトルクTclである。また、当該マップは、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ位置となるように設定されている。
【0026】
図3に示すように、運転者のシフト操作部の操作状況や、車両の車速等を判別し、変速が開始されると、ECU30はクラッチ操作部25を作動させ、クラッチ21が切断する方向にクラッチストロークSclを変化させる(図3a)。
【0027】
次に図3bのようにクラッチストロークSclが第1所定値となると、そのときのクラッチトルクTclに基づいて以降のクラッチストローク制御を実施し、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ位置、即ちクラッチトルクTcl=0でクラッチ21が動力を伝達不能となるようにする。例えば、図3に示すように、クラッチストロークSclが第1所定値となった以降では、第1所定値以前のクラッチストロークSclの変化よりも傾きの小さいクラッチストロークSclの変化とする。
【0028】
詳しくは、図2に示すように、エンジントルク算出部31にて、クランク角センサ11にて検出されるエンジン10の回転速度と、エアフローセンサ12にて検出されるエンジン10の吸入空気量と、エンジン10に燃料を供給する燃料噴射弁13の作動状態に基づいて算出される燃料噴射量とに基づいて、エンジン10の発生するトルクであるエンジントルクTegを算出する。また、回転変化量算出部32にて、クランク角センサ11にて検出されるエンジン10の回転速度を時間で微分し、回転速度変化量aegを算出する。
【0029】
そして、クラッチトルク算出部33にて、エンジントルク算出部31にて算出されたエンジントルクTegと回転変化量算出部32にて算出された回転速度変化量aegと予めECU30に記憶されたエンジン10のエンジン慣性モーメントIegと運動方程式から求められる下記式(1)に基づいて、クラッチトルクTclを算出する。
【0030】
Tcl=Teg−Ieg×aeg・・・・(1)
次に、クラッチストローク算出部34にて、クラッチトルク算出部33にて算出されたクラッチトルクTclと車両の車速及び走行距離等によるクラッチ21の劣化を考慮した図4のクラッチトルクTclとクラッチストロークSclとの関係を示すマップに基づき、クラッチストロークSclを算出する。なお、当該マップは、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ開始位置となるように設定されている。図3cのようにクラッチトルクTcl=0でクラッチストロークSclが半クラッチ開始位置となる。
【0031】
そして、クラッチ操作部25をクラッチストローク算出部34にて算出されたクラッチストロークSclとなるように作動させる。
そして、クラッチストロークSclが半クラッチ開始位置通過後の第2所定値となると、クラッチストロークSclが第1所定値以前と同様に所定時間当たり所定クラッチストロークScl変化するように、即ち所定の傾きでクラッチストロークSclが変化するようにクラッチ操作部25を作動させ、クラッチ21を切断方向に作動させ、完断位置とする(図3d)。
【0032】
このように、本発明に係る機械式自動変速装置の制御システムによれば、ギヤの変速時に、上記式(1)から算出されるクラッチトルクTclが0であるとクラッチストロークSclをクラッチ21が半クラッチ開始位置、即ちクラッチ21が動力を伝達不能となる位置にクラッチ操作部25を作動させるようにしている。
【0033】
これにより、エンジン10が無負荷である時にクラッチ21の切断によって、クラッチ21以降の入力軸22、出力軸23、プロペラシャフト24等の駆動系部品に掛かっていたエンジン10側から伝達される力(慣性力など)が急激に減少して駆動系部品の負荷が急激に開放されることを防止することができる。
したがって、駆動系部品の回転が大きく乱れることを防止することができるので、変速時のショックの発生を防止することができる。
【0034】
また、上記式(1)に示すように、クラッチトルクTclをエンジントルクTegに基づいて演算するので、クラッチ21の制御中にエンジントルクTegの変動に対応してクラッチトルクTclが変化し、クラッチ21の滑りやエンジン回転速度の吹き上がりを抑制して、滑らかな変速が可能となる。特に、クラッチ滑りを抑制できるため、変速時に半クラッチの多用によるクラッチ21の摩耗を防止でき、車両重量が大きい場合での登坂走行中にシフトアップしたときに、クラッチ21の滑りによる失速を回避することができる。
【0035】
また、クラッチトルクTclを上記式(1)に基づいて算出しており、クラッチトルクTclを検出するセンサ類を設ける必要がないので、コスト増加を抑制しつつ、正確にクラッチトルクTclを算出することができる。
【0036】
また、クラッチストロークSclを車両の車速や走行距離等の走行状態に基づき補正されるクラッチトルクTclとクラッチストロークSclのマップより算出するようにしており、例えば車両の走行距離が延びクラッチ21が劣化しているような場合でも、クラッチ21の劣化を考慮して、クラッチストロークSclを正確に算出することができる。
【0037】
更に、変速時にエンジン回転速度が比較的低く、エンジン停止を回避するためにエンジントルクを低下させることができない場合など、式(1)に従った制御を行うと適切にクラッチが切れない状況では、式(1)に従った制御が可能となるまで、エンジン停止や車両飛び出し(暴走)とならないようにクラッチストロークを一定速度で切るように制御してもよい。
【0038】
また、図3のaとbの間において、図3のbとcの間と同様に式(1)を満たすようにクラッチ21を切ることも可能であり、例えば図3aからcの間においてエンジントルクを数回に分けて傾きを変えながら減少させつつ式(1)を満たすようにクラッチ21を切る手法を取ってもよい。
【0039】
以上で発明の実施形態の説明を終えるが、本発明の形態は実施形態に限定されるものではない。
例えば、本実施形態は、回転変化量算出部32にて、クランク角センサ11にて検出されるエンジン10の回転速度を時間で微分し、回転速度変化量aegを算出するようにしているが、これに限定するものではなく、例えば、車速を微分しタイヤ径や総減速比を用いて算出するようにしても良い。このように、エンジン10の回転速度より比較的変動の少ない車速に基づいて回転速度変化量aegを算出することで、より滑らかな変速を図ることができる。
【符号の説明】
【0040】
10 エンジン(内燃機関)
11 クランク角センサ(運転状態検出手段)
12 エアフローセンサ(運転状態検出手段)
13 燃料噴射弁(運転状態検出手段)
20 機械式自動変速機
21 クラッチ
25 クラッチ操作部
26 出力軸回転センサ(走行状態検出手段)
30 ECU(制御手段)
【技術分野】
【0001】
本発明は、機械式自動変速装置の制御システムに関し、詳しくは、変速時のクラッチ制御に関する。
【背景技術】
【0002】
車両の変速装置として、手動変速装置における変速機の操作(セレクト及びシフト)及びクラッチの断接をアクチュエータにより作動させることで自動変速を可能とする機械式自動変速装置が知られている。当該自動変速装置では、変速時にクラッチを切断するとエンジンの動力が突然切断されることにより、ショックが発生することがある。
【0003】
したがって、自動変速装置では、例えば、特許文献1のようにエンジントルクを無負荷状態にしてクラッチを切断したり、特許文献2のようにエンジントルクに応じてクラッチを切断する速度を変化させたり、特許文献3のように車両の加速度が0となるようにエンジントルクを制御した後にクラッチを切断したりすることで、クラッチ切断時のエンジンの動力の切断によるトルク変動を低減して変速時のショックを低減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−211945号公報
【特許文献2】特許第3752959号公報
【特許文献3】特許第3417823号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献の自動変速装置は、エンジントルクに基づいてクラッチの切断を制御しており、クラッチから駆動輪までの駆動系部品に掛かる負荷を考慮していない。
【0006】
したがって、クラッチの切断に伴い、クラッチ以降の駆動系部品に掛かるエンジン側の慣性が急激に無くなることにより、駆動系部品の負荷が急激に開放され、駆動系部品の回転(例えば、クラッチ回転数)が大きく乱れることとなり、延いては、変速時のショックが発生することとなり好ましいことではない。
【0007】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1の機械式自動変速装置の制御システムでは、車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記複数の切換手段を作動させ前記内燃機関から入力される動力を増減速し出力する変速手段と、前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、前記制御手段は、前記ギヤ列の係合状態の切り換え時に、前記クラッチに掛かる負荷である駆動系負荷が0であるときに前記クラッチを切断するように前記クラッチを操作することを特徴とする。
【0009】
また、請求項2の機械式自動変速装置の制御システムでは、請求項1において、前記内燃機関の運転状態を検出する運転状態検出手段を備え、前記制御手段は、前記運転状態検出手段にて検出される前記内燃機関の出力トルクと、予め設定される前記内燃機関の慣性モーメントと、前記運転状態検出手段にて検出される前記内燃機関の回転速度変化量とに基づいて前記駆動系負荷を算出することを特徴とする。
【0010】
また、請求項3の機械式自動変速装置の制御システムでは、請求項1或いは2において、前記車両の走行状態を検出する走行状態検出手段を備え、前記制御手段は、前記駆動系負荷と前記クラッチストロークとの関係をマップ管理し、前記走行状態検出手段にて検出される前記車両の走行状態に基づき前記マップを補正し、補正後の前記マップに基づき前記クラッチストロークを算出することを特徴とする。
【発明の効果】
【0011】
請求項1の発明によれば、ギヤ列の係合状態の切り換え時に、駆動系負荷が0であるときにクラッチを切断するようにクラッチの操作を行っている。
このように、駆動系負荷が0であるときにクラッチ操作を行うことにより、内燃機関が無負荷でのクラッチの切断に伴うクラッチより駆動輪側の駆動系部品に掛かる内燃機関側から伝達される力(慣性力など)の急激な減少を防止でき、駆動系部品の負荷が急激に開放されることを防止することができる。
【0012】
したがって、駆動系部品の回転(例えば、クラッチ回転数)が大きく乱れることを防止できるので、変速時のショックの発生を防止することができる。
また、請求項2の発明によれば、駆動系負荷を内燃機関の出力トルクと、内燃機関の慣性モーメントと、内燃機関の回転速度変化量とに基づいて算出しており、駆動系負荷を検出するセンサ類を設ける必要がないので、コスト増加を抑制しつつ、正確に駆動系負荷を算出することができる。
【0013】
また、請求項3の発明によれば、クラッチストローク量を走行状態検出手段にて検出される車両の走行状態に基づき補正される駆動系負荷とクラッチストロークのマップより算出するようにしており、例えば車両の走行距離が延びクラッチが劣化しているような場合でも、クラッチの劣化を考慮してクラッチストロークを正確に算出することができる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る機械式自動変速装置の制御システムの概略構成図である。
【図2】本発明に係る機械式自動変速装置の制御システムのクラッチ作動制御手順を示す制御ブロック図である。
【図3】本発明に係る機械式自動変速装置の制御システムのトルクとクラッチストロークの変化を時系列で示す図である。
【図4】本発明に係る機械式自動変速装置の制御システムのクラッチトルクとクラッチストロークとの関係を示すマップである。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
図1は、本発明の実施形態に係る図示しない機械式自動変速装置の制御システムの概略構成図である。以下、当該機械式自動変速装置の制御システムの構成を説明する。
【0016】
図1に示すように、機械式自動変速装置の制御システムは、図示しない車両に搭載され、大きく分けてエンジン(内燃機関)10、機械式自動変速機(変速手段)20、及び電子コントロールユニット(以下、ECUという)(制御手段)30から構成される。なお、それぞれの構成要素は、電気的に接続されている。
【0017】
エンジン10は、運転者の図示しないアクセルペダルの操作量に応じて動力を発生するものである。また、エンジン10には、エンジン10の回転速度を検出するクランク角センサ(運転状態検出手段)11、エンジン10の吸入空気量を検出するエアフローセンサ(運転状態検出手段)12及び燃料を噴射しエンジン10の出力を調整する燃料噴射弁(運転状態検出手段)13が設けられている。
【0018】
機械式自動変速機20は、図示しない複数の変速部(切換手段)を作動させ、ギヤ列の係合状態を切り換えてエンジン10で発生した動力を車速に合わせて変速し増幅させ、動力を図示しないタイヤへ伝達をするものである。また、機械式自動変速機20は、クラッチ21、入力軸22、出力軸23、プロペラシャフト24、クラッチ操作部25及び出力軸回転センサ(走行状態検出手段)26を備えている。
【0019】
クラッチ21は、エンジン10と入力軸22との間に介装され、エンジン10で発生した動力を入力軸22へ伝達又は遮断するものである。
プロペラシャフト24は、出力軸23に接続され、変速された動力をタイヤに伝達するものである。
【0020】
クラッチ操作部25は、アクチュエータ等で構成され、クラッチ21の断接を行うものである。また、クラッチ操作部25には、クラッチ21のストローク量を検出するストロークセンサが内蔵されている。
出力軸回転センサ26は、出力軸23の回転速度を検出するものであり、当該センサの検出信号と出力軸23以降のギヤ比(最終減速比)とタイヤ外周とに基づいて車両の車速の算出が可能となる。
【0021】
ECU30は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される。
ECU30の入力側には、クランク角センサ11、エアフローセンサ12、燃料噴射弁13、及びクラッチ操作部25等のセンサ類が電気的に接続されており、これら各種センサ類からの検出情報が入力される。
【0022】
一方、ECU30の出力側には、クラッチ操作部25が電気的に接続されている。
ECU30は、これら各種センサ類にて検出する検出情報より、車速等の車両の走行状態、エンジントルク等のエンジン10の運転状態を算出する。また、ECU30は、それら走行状態や運転状態や運転者の図示しないシフト操作部の操作状況を判別し、クラッチ操作部25及び変速部を制御して機械式自動変速機20の変速を行う。
【0023】
以下、このように構成された本発明に係る機械式自動変速装置の制御システムにおけるクラッチ21の作動制御について説明する。
図2は、本発明に係る機械式自動変速装置の制御システムのクラッチ作動制御手順を示す制御ブロック図である。
【0024】
また。図3は、トルクとクラッチストロークの変化を時系列で示す図であり、図中太破線はエンジンが出力するトルクであるエンジントルクTegを、太実線はクラッチ21に加わるトルクであるクラッチトルク(駆動負荷)Tclを、細破線はクラッチ21が完全に接続する完接位置を、一点鎖線はクラッチ21が動力の伝達を開始する半クラッチ開始位置を、二点鎖線はクラッチ21が完全に切断する完断位置をそれぞれ示す。
【0025】
また、図4は、クラッチトルクTclとクラッチストロークSclとの関係を示すマップであり、図中破線は補正前を、実線は補正後をそれぞれ示す。当該補正前とは、クラッチ21の新品時のクラッチストロークSclに対する伝達可能なクラッチトルクTclである。また、補正後とは、車両の車速や走行距離等の走行状況によるクラッチ21の劣化度合いを考慮したクラッチストロークSclに対する伝達可能なクラッチトルクTclである。また、当該マップは、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ位置となるように設定されている。
【0026】
図3に示すように、運転者のシフト操作部の操作状況や、車両の車速等を判別し、変速が開始されると、ECU30はクラッチ操作部25を作動させ、クラッチ21が切断する方向にクラッチストロークSclを変化させる(図3a)。
【0027】
次に図3bのようにクラッチストロークSclが第1所定値となると、そのときのクラッチトルクTclに基づいて以降のクラッチストローク制御を実施し、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ位置、即ちクラッチトルクTcl=0でクラッチ21が動力を伝達不能となるようにする。例えば、図3に示すように、クラッチストロークSclが第1所定値となった以降では、第1所定値以前のクラッチストロークSclの変化よりも傾きの小さいクラッチストロークSclの変化とする。
【0028】
詳しくは、図2に示すように、エンジントルク算出部31にて、クランク角センサ11にて検出されるエンジン10の回転速度と、エアフローセンサ12にて検出されるエンジン10の吸入空気量と、エンジン10に燃料を供給する燃料噴射弁13の作動状態に基づいて算出される燃料噴射量とに基づいて、エンジン10の発生するトルクであるエンジントルクTegを算出する。また、回転変化量算出部32にて、クランク角センサ11にて検出されるエンジン10の回転速度を時間で微分し、回転速度変化量aegを算出する。
【0029】
そして、クラッチトルク算出部33にて、エンジントルク算出部31にて算出されたエンジントルクTegと回転変化量算出部32にて算出された回転速度変化量aegと予めECU30に記憶されたエンジン10のエンジン慣性モーメントIegと運動方程式から求められる下記式(1)に基づいて、クラッチトルクTclを算出する。
【0030】
Tcl=Teg−Ieg×aeg・・・・(1)
次に、クラッチストローク算出部34にて、クラッチトルク算出部33にて算出されたクラッチトルクTclと車両の車速及び走行距離等によるクラッチ21の劣化を考慮した図4のクラッチトルクTclとクラッチストロークSclとの関係を示すマップに基づき、クラッチストロークSclを算出する。なお、当該マップは、クラッチトルクTcl=0でクラッチストロークSclが半クラッチ開始位置となるように設定されている。図3cのようにクラッチトルクTcl=0でクラッチストロークSclが半クラッチ開始位置となる。
【0031】
そして、クラッチ操作部25をクラッチストローク算出部34にて算出されたクラッチストロークSclとなるように作動させる。
そして、クラッチストロークSclが半クラッチ開始位置通過後の第2所定値となると、クラッチストロークSclが第1所定値以前と同様に所定時間当たり所定クラッチストロークScl変化するように、即ち所定の傾きでクラッチストロークSclが変化するようにクラッチ操作部25を作動させ、クラッチ21を切断方向に作動させ、完断位置とする(図3d)。
【0032】
このように、本発明に係る機械式自動変速装置の制御システムによれば、ギヤの変速時に、上記式(1)から算出されるクラッチトルクTclが0であるとクラッチストロークSclをクラッチ21が半クラッチ開始位置、即ちクラッチ21が動力を伝達不能となる位置にクラッチ操作部25を作動させるようにしている。
【0033】
これにより、エンジン10が無負荷である時にクラッチ21の切断によって、クラッチ21以降の入力軸22、出力軸23、プロペラシャフト24等の駆動系部品に掛かっていたエンジン10側から伝達される力(慣性力など)が急激に減少して駆動系部品の負荷が急激に開放されることを防止することができる。
したがって、駆動系部品の回転が大きく乱れることを防止することができるので、変速時のショックの発生を防止することができる。
【0034】
また、上記式(1)に示すように、クラッチトルクTclをエンジントルクTegに基づいて演算するので、クラッチ21の制御中にエンジントルクTegの変動に対応してクラッチトルクTclが変化し、クラッチ21の滑りやエンジン回転速度の吹き上がりを抑制して、滑らかな変速が可能となる。特に、クラッチ滑りを抑制できるため、変速時に半クラッチの多用によるクラッチ21の摩耗を防止でき、車両重量が大きい場合での登坂走行中にシフトアップしたときに、クラッチ21の滑りによる失速を回避することができる。
【0035】
また、クラッチトルクTclを上記式(1)に基づいて算出しており、クラッチトルクTclを検出するセンサ類を設ける必要がないので、コスト増加を抑制しつつ、正確にクラッチトルクTclを算出することができる。
【0036】
また、クラッチストロークSclを車両の車速や走行距離等の走行状態に基づき補正されるクラッチトルクTclとクラッチストロークSclのマップより算出するようにしており、例えば車両の走行距離が延びクラッチ21が劣化しているような場合でも、クラッチ21の劣化を考慮して、クラッチストロークSclを正確に算出することができる。
【0037】
更に、変速時にエンジン回転速度が比較的低く、エンジン停止を回避するためにエンジントルクを低下させることができない場合など、式(1)に従った制御を行うと適切にクラッチが切れない状況では、式(1)に従った制御が可能となるまで、エンジン停止や車両飛び出し(暴走)とならないようにクラッチストロークを一定速度で切るように制御してもよい。
【0038】
また、図3のaとbの間において、図3のbとcの間と同様に式(1)を満たすようにクラッチ21を切ることも可能であり、例えば図3aからcの間においてエンジントルクを数回に分けて傾きを変えながら減少させつつ式(1)を満たすようにクラッチ21を切る手法を取ってもよい。
【0039】
以上で発明の実施形態の説明を終えるが、本発明の形態は実施形態に限定されるものではない。
例えば、本実施形態は、回転変化量算出部32にて、クランク角センサ11にて検出されるエンジン10の回転速度を時間で微分し、回転速度変化量aegを算出するようにしているが、これに限定するものではなく、例えば、車速を微分しタイヤ径や総減速比を用いて算出するようにしても良い。このように、エンジン10の回転速度より比較的変動の少ない車速に基づいて回転速度変化量aegを算出することで、より滑らかな変速を図ることができる。
【符号の説明】
【0040】
10 エンジン(内燃機関)
11 クランク角センサ(運転状態検出手段)
12 エアフローセンサ(運転状態検出手段)
13 燃料噴射弁(運転状態検出手段)
20 機械式自動変速機
21 クラッチ
25 クラッチ操作部
26 出力軸回転センサ(走行状態検出手段)
30 ECU(制御手段)
【特許請求の範囲】
【請求項1】
車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記複数の切換手段を作動させ前記内燃機関から入力される動力を増減速し出力する変速手段と、
前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記ギヤ列の係合状態の切り換え時に、前記クラッチに掛かる負荷である駆動系負荷が0であるときに前記クラッチを切断するように前記クラッチを操作することを特徴とする機械式自動変速装置の制御システム。
【請求項2】
前記内燃機関の運転状態を検出する運転状態検出手段を備え、
前記制御手段は、前記運転状態検出手段にて検出される前記内燃機関の出力トルクと、予め設定される前記内燃機関の慣性モーメントと、前記運転状態検出手段にて検出される前記内燃機関の回転速度変化量とに基づいて前記駆動系負荷を算出することを特徴とする、請求項1に記載の機械式自動変速装置の制御システム。
【請求項3】
前記車両の走行状態を検出する走行状態検出手段を備え、
前記制御手段は、前記駆動系負荷と前記クラッチストロークとの関係をマップ管理し、前記走行状態検出手段にて検出される前記車両の走行状態に基づき前記マップを補正し、補正後の前記マップに基づき前記クラッチストロークを算出することを特徴とする、請求項1或いは2に記載の機械式自動変速装置の制御システム。
【請求項1】
車両に搭載され、内燃機関からの動力がクラッチを介して入力される入力軸と、前記車両の駆動輪に動力を出力する出力軸と、前記入力軸と前記出力軸に設けられる複数のギヤ列と、前記複数のギヤ列の係合状態を切り換える複数の切換手段とを有し、前記複数の切換手段を作動させ前記内燃機関から入力される動力を増減速し出力する変速手段と、
前記クラッチと前記複数の切換手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記ギヤ列の係合状態の切り換え時に、前記クラッチに掛かる負荷である駆動系負荷が0であるときに前記クラッチを切断するように前記クラッチを操作することを特徴とする機械式自動変速装置の制御システム。
【請求項2】
前記内燃機関の運転状態を検出する運転状態検出手段を備え、
前記制御手段は、前記運転状態検出手段にて検出される前記内燃機関の出力トルクと、予め設定される前記内燃機関の慣性モーメントと、前記運転状態検出手段にて検出される前記内燃機関の回転速度変化量とに基づいて前記駆動系負荷を算出することを特徴とする、請求項1に記載の機械式自動変速装置の制御システム。
【請求項3】
前記車両の走行状態を検出する走行状態検出手段を備え、
前記制御手段は、前記駆動系負荷と前記クラッチストロークとの関係をマップ管理し、前記走行状態検出手段にて検出される前記車両の走行状態に基づき前記マップを補正し、補正後の前記マップに基づき前記クラッチストロークを算出することを特徴とする、請求項1或いは2に記載の機械式自動変速装置の制御システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−32805(P2013−32805A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−169173(P2011−169173)
【出願日】平成23年8月2日(2011.8.2)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年8月2日(2011.8.2)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
[ Back to top ]