
機械式自動変速装置の変速制御機構
【課題】車両の外的要因である路面勾配や車両総重量を考慮した制御を行ない、登坂時の失速や平坦路における燃費の悪化を防止することが出来る機械式自動変速装置の変速制御機構の提供。
【解決手段】燃料噴射量検出手段(2)と、燃料噴射制御装置(1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能とを有している。
【解決手段】燃料噴射量検出手段(2)と、燃料噴射制御装置(1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能とを有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転状況に応じて自動的に適正な変速段にギヤ入れをする機械式自動変速装置の変速制御に関する。
【背景技術】
【0002】
機械式自動変速機を搭載した車両の変速制御において、従来技術では、変速の際の燃料噴射については、車両の外的要因である路面勾配や車両総重量を考慮した制御は行っていない。
そのため、従来技術においては、走行状態に合致した変速制御が行われずに、不都合が生じる恐れがあった。
例えば、登坂時において、路面勾配や車両総重量(積載状態であるか空荷であるかにより、大幅に変動)を判断のパラメータとはしていないため、路面勾配が大きいにも拘らずシフトアップしてしまうと、車両が失速する恐れがある。あるいは、最大限に積載しているため車両総重量が非常に重くなっているにも拘らずシフトアップしてしまうと、その結果、車両が失速する恐れがある。
また、路面勾配が極めて小さい平坦路において、シフトアップのタイミングが遅いと、燃費が悪化してしまう恐れがある。あるいは、いわゆる「空荷」の場合であって、車両総重量が非常に軽い場合に、シフトアップのタイミングが遅いと、燃費が悪化してしまう恐れがある
【0003】
その他の従来技術として、変速時のトルク変動(変速ショック)を低減する制御装置が提案されている(特許文献1参照)。
しかし、係る従来技術(特許文献1)は、車両の外的要因である路面勾配や車両総重量を考慮した制御を開示するものではなく、上述した問題点を解消することは出来ない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−66759号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、車両の外的要因である路面勾配や車両総重量を考慮した制御を行ない、登坂時の失速や平坦路における燃費の悪化を防止することが出来る機械式自動変速装置の変速制御機構の提供を目的としている。
【課題を解決するための手段】
【0006】
本発明の機械式自動変速装置の変速制御機構(100)は、燃料噴射量検出手段(2)と、燃料噴射制御装置(エンジンコントローラ1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能と、燃料噴射制御装置(1)に制御信号を伝達して選択された燃料噴射量目標値に近づける様に燃料噴射量を制御する機能と、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きG)により今回の変速と次回の変速の時間的間隔(T)を決定する機能を有していることを特徴としている。
【0007】
ここで、前記コントロールユニット(10)により、第1の燃料噴射量目標値(目標燃料噴射量A)と第2の燃料噴射量目標値(目標燃料噴射量B)の何れか一方を選択するかについては、車両の使用や走行状態、その他の条件に起因して、ケース・バイ・ケースで決定することが出来る。
例えば、前記コントロールユニット(10)は、路面勾配がしきい値(α:閾値)以上であり、車両総重量がしきい値(β)未満であれば、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求め、路面勾配がしきい値(α)未満であり、車両総重量がしきい値(β)以上であれば、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能を有しているのが好ましい。
そして、路面勾配がしきい値(α)以上であり、車両総重量もしきい値(β)以上である場合には、第1の燃料噴射量目標値(目標燃料噴射量A)とするか第2の燃料噴射量目標値(目標燃料噴射量B)とするかについては、ケース・バイ・ケースで定められるのが好ましい。
なお本発明において、路面勾配がしきい値(α)未満であり、車両総重量もしきい値(β)未満である場合には、アクセル開度に対応した燃料噴射量が燃料噴射量の目標値(通常の燃料噴射量目標値C:アクセル開度に応じた噴射量)とするのが好ましい。
【0008】
また、本発明において、前記コントロールユニット(10)は、今回の変速と次回の変速の時間的間隔(T)を決定するに際して、燃料噴射量検出手段(2)で検出した情報を元に燃料噴射制御装置(エンジンコントローラ1)で演算された燃料噴射量の時間特性(傾きG)をしきい値(γ)と比較し、しきい値(γ)以上であれば前記時間的間隔(T)を短縮し、しきい値未満であれば前記時間的間隔(T)を延長する機能を有しているのが好ましい。
【発明の効果】
【0009】
上述する構成を具備する本発明によれば、路面勾配をパラメータとして第1の燃料噴射量目標値(目標燃料噴射量A)を求めている(例えば、図2で示す様な特性図を使用して、路面勾配に対応した目標燃料噴射量Aを決定する)。
あるいは、車両総重量をパラメータとして第2の燃料噴射量目標値(目標燃料噴射量B)を求めている(例えば、図3で示す様な特性図を使用して、車両総重量に対応した目標燃料噴射量Bを決定する)。
そのため、車両の外的要因である路面勾配や車両総重量を考慮した制御が実行される。
換言すれば、本発明によれば、路面勾配が急な場合や、車両総重量が大きい場合には、第1の燃料噴射量目標値(目標燃料噴射量A)あるいは第2の燃料噴射量目標値(目標燃料噴射量B)を目標値とする燃料噴射制御が実行されることとなり、通常の燃料噴射量制御(アクセル開度に対応して目標燃料噴射量を決定する制御:ステップS7)に比較して、大量の燃料を噴射して、車両の失速を防止することが出来る。
【0010】
また、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)に基づいて、車両の加速度の値が大きいか小さいかを判断し、当該加速度の数値の大小に基づいて、今回の変速(シフトチェンジ)と次回の変速(シフトチェンジ)の時間的間隔(T)を決定している。そのため、登坂路や車両総重量が大きい場合の様に、加速度の値が小さいと判断される場合には、前記時間的間隔(T)を長く設定して、シフトアップを速く行い過ぎることにより車両が失速してしまう事態を防止する。より具体的には、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)が大きい(しきい値γ以上である)場合には、車両の加速度の値が大きい(加速状態である)と判断して、今回の変速と次回の変速の時間的間隔(T)を短く設定し、早期のシフトアップを可能にして、燃費悪化を防止する。
一方、平坦路である場合や車両総重量が小さい場合の様に、加速度の値が大きいと判断される場合には、前記時間的間隔(T)を短く設定して、シフトアップを速く行い、以って、燃費の悪化を防止する。すなわち、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)が小さい(しきい値γ未満である)場合には、加速度の値が小さい状態であると判断して、前記時間的間隔(T)を延長して、早急なシフトアップを抑制して、車両の失速を防止する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態を示すブロック図である。
【図2】路面勾配と燃料噴射量との関係を示す特性図である。
【図3】路面勾配と車両総重量との関係を示す特性図である。
【図4】単位時間当たりの燃料噴射量と経過時間との関係を示す特性図である。
【図5】実施形態における目標燃料噴射量を決定する制御を示すフローチャートである。
【図6】実施形態における変速保留時間の制御を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して、本発明の実施形態について説明する。
先ず、図1を参照して実施形態の構成について説明する。
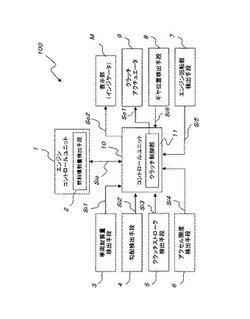
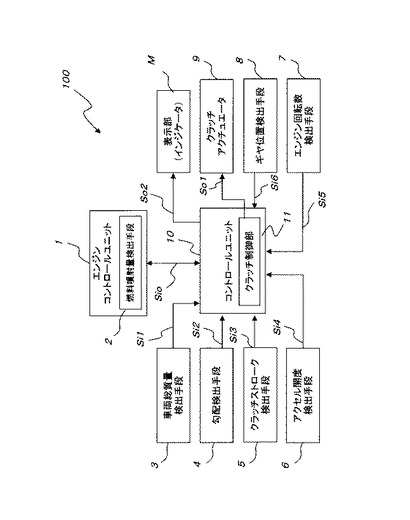
図1において、全体を符号100で示す変速制御機構は、燃料噴射量検出手段2と、車両総重量検出手段3と、勾配検出手段4と、クラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部Mと、制御手段であるコントロールユニット10を備えている。
図1では、実施形態における制御(後述)とは直接関係の無い構成要素、具体的にはクラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部Mも包含して、図示されている。係る構成要素(クラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部M)は、車両の走行について必須である。
【0013】
燃料噴射量検出手段2は、燃料噴射制御装置(以下「エンジンコントローラ」と記載する)1に内蔵されている。
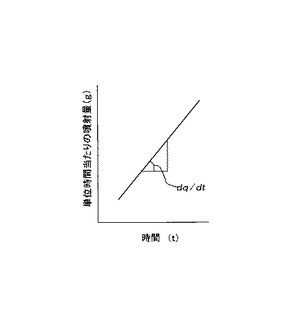
エンジンコントローラ1は、燃料噴射量検出手段2で検出した燃料噴射量情報から、図4の特性図に示すような燃料噴射量の時間特性(傾きdq/dt)を演算する機能を有している。図4において、横軸に変速に要する経過時間をとり、縦軸に単位時間の燃料噴射量をとっている。そして、図4の特性線の傾きが「燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性dq/dt」である。
【0014】
図1において、車両総重量検出手段3は、例えば車軸あるいは懸架系に取り付けられた歪みセンサ(歪ゲージ)等の公知の装置を用いることが出来る。
路面勾配検出手段4についても、例えば車両に取り付けられた傾斜計の様な、公知の装置を用いることが出来る。あるいは、路面勾配検出手段4として、地図情報や道路標識の勾配表示等を、公知の装置(車載カメラやカーナビゲーションシステム等)で読み取り、その情報を用いる機構を採用することも可能である。
【0015】
車両総重量検出手段3は、入力信号ラインSi1によって、コントロールユニット10と接続されている。
勾配検出手段4は、入力信号ラインSi2によって、コントロールユニット10に接続されている。
クラッチストローク検出手段5は、入力信号ラインSi3によって、コントロールユニット10に接続されている。
アクセル開度検出手段6は、入力信号ラインSi4によって、コントロールユニット10に接続されている。
エンジン回転数検出手段7は、入力信号ラインSi5によって、コントロールユニット10に接続されている。
ギヤ位置検出手段8は、入力信号ラインSi6によって、コントロールユニット10に接続されている。
【0016】
また、コントロールユニット10は、制御信号ラインSo1によって、クラッチアクチュエータ9と接続されている。
そしてコントロールユニット10は、制御信号ラインSo2によって、表示部Mと接続されている。
また、双方向信号ラインSioによって、エンジンコントローラ1は、コントロールユニット10と接続されている。
ここで、表示部Mは、例えばインストルメントパネル(図示せず)に設けられた全てのインジケータを、包括的に表現している。
【0017】
コントロールユニット10は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能を有している。
【0018】
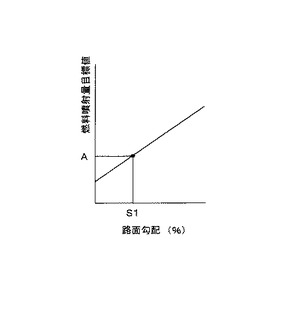
図示の実施形態では、コントロールユニット10が第1の燃料噴射量目標値(目標燃料噴射量A)を求めるに際しては、図2で示す様な路面勾配(横軸)と第1の燃料噴射量目標値(縦軸)との関係を示す特性図を使用している。
図2において、勾配検出手段4で検出された勾配が横軸上の符号S1で示されている。コントロールユニット10は、図2の特性線において、勾配S1に対応する縦軸の数値Aを、第1の燃料噴射量目標値(A)として決定する。
ただし、第1の燃料噴射量目標値Aを決定するのに用いられるのは図2で示す様な特性図には限定されない。路面勾配と第1の燃料噴射量目標値の関係を表すテーブル、数式等を用いることも可能である。
【0019】
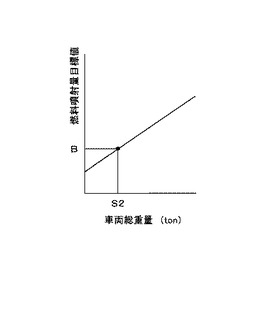
また、図示の実施形態では、コントロールユニット10が第2の燃料噴射量目標値(目標燃料噴射量B)を求めるに際しては、図3で示す様な車両総重量(横軸)と第2の燃料噴射量目標値(縦軸)との関係を示す特性図を使用している。
図3において、車両総重量検出手段3で検出された車両総重量が横軸上の符号S2で示されている。コントロールユニット10は、図3の特性線において、車両総重量S2に対応する縦軸の数値Bを、第2の燃料噴射量目標値(B)として決定する。
第2の燃料噴射量目標値Bの決定においても、用いられるのは図3で示す様な特性図に限定されない。路面勾配と第2の燃料噴射量目標値の関係を表すテーブル、数式等を用いることも可能である。
【0020】
コントロールユニット10は、エンジンコントローラ1に制御信号を伝達して、燃料噴射量が目標値(燃料噴射量目標値A、B、Cの何れか:図5参照)となる様に燃料噴射量を制御する機能と、燃料噴射量検出手段2で演算された燃料噴射量の時間特性(傾きdq/dt)に基づいて、今回の変速(ギヤチェンジ)と次回の変速(ギヤチェンジ)の時間的間隔(T)を制御する機能を有している。
具体的には、傾きdq/dtがしきい値γ(図6参照)よりも小さいと時間的間隔(T)を長く設定し、しきい値γ(図6参照)よりも大きいと時間的間隔(T)を短く設定する。
【0021】
より詳細には、図1において、コントロールユニット10は、今回の変速と次回の変速の時間的間隔(T)を決定するに際して、燃料噴射量検出手段2で検出した情報に基づいて、燃料噴射制御装置1で燃料噴射量の時間特性(傾きdq/dt)を演算し、求められた傾きdq/dtをしきい値(γ)と比較し、傾きdq/dtがしきい値γ以上であれば加速度の数値が大きい(加速度が大きい)と判断して、前記時間的間隔(T)を短縮する機能を有している。
一方、コントロールユニット10は、傾きdq/dtがしきい値γ未満であれば、加速度の数値が小さい(加速度が小さい)と判断して、前記時間的間隔(T)を延長する機能を有している。
【0022】
図示の実施形態においては、コントロールユニット10において、例えば、コントロールユニット10は、路面勾配がしきい値α以上であり、車両総重量がしきい値β未満であれば、路面勾配と燃料噴射量目標値Aの特性(例えば図2参照)から第1の燃料噴射量目標値(目標燃料噴射量A)を決定する。
一方、路面勾配がしきい値α未満であり、車両総重量がしきい値β以上であれば、車両総重量と燃料噴射量目標値Bの特性(例えば図3参照)から、第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能を有している。
【0023】
図示の実施形態において、路面勾配がしきい値α未満であり、車両総重量もしきい値β未満である場合には、アクセル開度に対応した燃料噴射量が燃料噴射量の目標値(通常の燃料噴射量目標値)となっている。
ここで、路面勾配がしきい値α以上であり、車両総重量もしきい値β以上である場合には、第1の燃料噴射量目標値(目標燃料噴射量A)とするか第2の燃料噴射量目標値(目標燃料噴射量B)とするかについては、車両の仕様、使用状態、その他の条件に基づいて、ケース・バイ・ケースで定められるべきである。
路面勾配に関するしきい値αと、車両総重量のしきい値βと、傾きdq/dtのしきい値γについても、車両の仕様、走行条件、その他に基づいて、ケース・バイ・ケースで定められるべきである。
【0024】
次に、図5に基づいて、目標燃料噴射量を求めるための制御(燃料噴射制御を開始するまでの制御)について説明する。
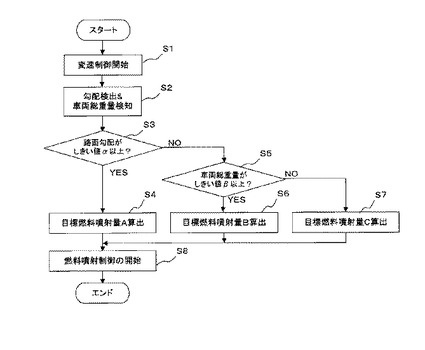
図5のステップS1では、自動変速装置による変速制御を開始したならば、ステップS2に進み、勾配検出手段4によって路面の勾配を検出すると共に、車両総重量検出手段3によって走行時の車両量総質量を検出する。そして、ステップS3に進む。
ステップS3では、コントロールユニット10は、勾配検出手段4で計測された路面勾配が、しきい値α以上か否かを判断する。
路面勾配がしきい値α以上であれば(ステップS3がYES)、ステップS4に進む。一方、路面勾配がしきい値α未満であれば(ステップS3がNO)、ステップS5に進む。
ここで、しきい値αは、例えば、路面勾配が緩やかで、通常のアクセル操作を行っても車両の減速が目立たない程度の勾配を設定することが出来る。ただし、しきい値αの値は、車両のエンジン特性や、変速機の(仕様)諸元によって、ケース・バイ・ケースで定められる。
【0025】
ステップS4(路面勾配がしきい値α以上:ステップS3がYES)では、目標燃料噴射量A(第1の燃料噴射量目標値)を決定する。目標燃料噴射量Aの決定に際しては、例えば、ステップS2で検出された路面勾配が、図2における符号S1であれば、図2の特性線について、対応する燃料噴射量目標値を、目標燃料噴射量Aとする。目標燃料噴射量Aを決定した後、ステップS8に進む。
図5のステップS5(路面勾配がしきい値α未満:ステップS3がNO)では、コントロールユニット10は、車両総重量検出手段3からの情報によって、車両総重量がしきい値β以上か否かを判断する。
車両総重量がしきい値β以上であれば(ステップS5がYES)、ステップS6に進む。一方、車両総重量がしきい値β未満であれば(ステップS5がNO)、ステップS7に進む。
なお、しきい値βは、例えば、車両総重量が定積載時の質量の値であるが、車両のエンジン特性や、変速機の(仕様)諸元によって、ケース・バイ・ケースで定められる。
【0026】
ステップS6(車両総重量がしきい値β以上:ステップS5がYES)では、目標燃料噴射量B(第2の燃料噴射量目標値)を演算する。目標燃料噴射量Bの決定に際しては、例えば、ステップS2で検出された車両総重量が、図3における符号S2であれば、図3の特性線について、対応する燃料噴射量目標値を、目標燃料噴射量Bとする。目標燃料噴射量Bを決定した後、ステップS8に進む。
【0027】
ステップS7(車両総重量がしきい値β未満:ステップS5がNO)では、目標燃料噴射量Cを決定して、ステップS8に進む。
ここで、目標燃料噴射量Cはいわゆる「通常時の噴射量」であり、アクセル開度に対応した燃料噴射量を意味している。ステップS7では、路面勾配が小さく且つ車両重量も軽量であるため、路面勾配と車両重量を考慮しない制御を行なっても、失火や燃費悪化等の上述した不都合が生じないと考えられるからである。
【0028】
ステップS8では、燃料噴射制御を開始する。すなわち、燃料噴射量を、ステップS4、S6、S7で決定された目標燃料噴射量A、B、Cの何れかにするべく、燃料噴射量制御を行なうのである。
そして、図5の制御を終える。ここで、図5の制御に引き続いて、図5の制御と同一の制御サイクルで、図6の制御が開始される。
【0029】
図5において、ステップS3がステップS5に先行して行われている。
しかし、それとは逆に、ステップS5をステップS3に先行させることが可能である。
或いは、ステップS3とステップS5を同時に行ない、且つ、ステップS4とステップS6を同時に行なうことも可能である。その場合においても、路面勾配がしきい値αよりも小さく、且つ、車両重量もしきい値βよりも小さい場合に、ステップS7に進むことになる。
【0030】
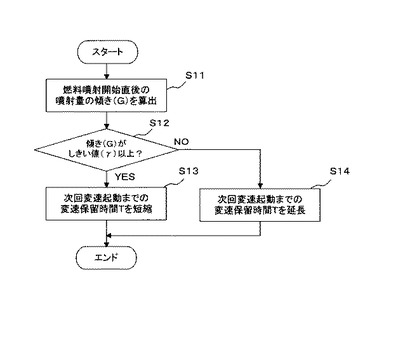
図6の制御において、ステップS11では、エンジンコントローラ1により、図5のステップS8で開始される燃料噴射制御における燃料噴射量の時間的特性(傾きdq/dt:図4参照)を演算する。そして、ステップS12に進む。
ステップS12では、コントロールユニット10は、ステップS11で演算した傾きdq/dtがしきい値γ以上であるか否かを判断する。
ステップS11で演算した傾きdq/dtがしきい値γ以上であれば(ステップS12がYES)、ステップS13に進む。
一方、ステップS11で演算した傾きdq/dtがしきい値未満であれば(ステップS12がNO)、ステップS14に進む。
【0031】
ステップS13(傾きdq/dtがしきい値γ以上:ステップS12がYES)では、燃料が噴射される速度が速く、加速度が大きいと判断して、コントロールユニット10は、次回変速起動までの変速保留時間Tを短縮する。
車両の加速度が大きければ、シフトアップを早期に行っても失火を起こす恐れがなく、また、加速度が大きいにも拘らずシフトアップしなければ燃費が悪化してしまう。そのため、傾きdq/dtがしきい値γ以上であるステップS13では、今回の変速と次回の変速の時間的間隔(T)を短く設定するのである。そして、その時点の制御サイクルを終了する。
【0032】
ステップS14(傾きdq/dtがしきい値未満:ステップS12がNO)では、燃料が噴射される速度が遅く、加速度が小さいと判断して、コントロールユニット10は、次回変速起動までの変速保留時間Tを延長する。
車両の加速度が小さければ、シフトアップを早期に行うと失火を起こす恐れがある。そのため、傾きdq/dtがしきい値γ未満であるステップS14では、今回の変速と次回の変速の時間的間隔(T)を長く設定する。そして、その時点の制御サイクルを終了する。
【0033】
図示の実施形態によれば、路面勾配に基づいて第1の燃料噴射量目標値(目標燃料噴射量A)を求め、車両総重量に基づいて第2の燃料噴射量目標値(目標燃料噴射量B)を求めている。そのため、車両の外的要因である路面勾配や車両総重量を考慮した制御が実行される。
そのため、路面勾配が急な場合や、車両総重量が大きい場合には、第1の燃料噴射量目標値(目標燃料噴射量A)あるいは第2の燃料噴射量目標値(目標燃料噴射量B)を目標値とする燃料噴射制御が実行されることとなり(ステップS4あるいはステップS6)、通常の燃料噴射量制御(ステップS7)に比較して、大量の燃料を噴射して、車両の失速を防止することが出来る。
【0034】
また、燃料噴射量検出手段2で演算された燃料噴射量の時間特性(傾きdq/dt)により、今回の変速と次回の変速の時間的間隔(T)を決定しているので、シフトアップの時期を適正に設定することが出来る。
例えば、燃料噴射量検出手段2で検出された情報を元にエンジンコントローラ1で演算された燃料噴射量の時間特性(傾きdq/dt)が大きい(しきい値γ以上である)場合には、車両が加速状態であると判断して、今回の変速と次回の変速の時間的間隔(T)を短縮して、早急なシフトアップを可能にすることが出来る。これにより、平坦路や空荷時にシフトアップが遅延して、燃費が悪化する事態を防止することが出来る。
一方、当該時間特性(傾きdq/dt)が小さい(しきい値γ未満である)場合には、(車両が登坂しているか、あるいは、車両総重量が大きく)加速が小さい状態であると判断して、前記時間的間隔(T)を延長して、早急なシフトアップを抑制して、登坂時やフル積載時にシフトアップを速く行い過ぎて、車両の失速を防止することが出来る。
【0035】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【符号の説明】
【0036】
1・・・燃料噴射制御装置/エンジンコントローラ
2・・・燃料噴射量検出手段
3・・・車両総重量検出手段
4・・・勾配検出手段
5・・・クラッチストローク検出手段
6・・・アクセル開度検出手段
7・・・エンジン回転数検出手段
8・・・ギヤ位置検出手段
9・・・クラッチアクチュエータ
10・・・制御手段/コントロールユニット
【技術分野】
【0001】
本発明は、車両の運転状況に応じて自動的に適正な変速段にギヤ入れをする機械式自動変速装置の変速制御に関する。
【背景技術】
【0002】
機械式自動変速機を搭載した車両の変速制御において、従来技術では、変速の際の燃料噴射については、車両の外的要因である路面勾配や車両総重量を考慮した制御は行っていない。
そのため、従来技術においては、走行状態に合致した変速制御が行われずに、不都合が生じる恐れがあった。
例えば、登坂時において、路面勾配や車両総重量(積載状態であるか空荷であるかにより、大幅に変動)を判断のパラメータとはしていないため、路面勾配が大きいにも拘らずシフトアップしてしまうと、車両が失速する恐れがある。あるいは、最大限に積載しているため車両総重量が非常に重くなっているにも拘らずシフトアップしてしまうと、その結果、車両が失速する恐れがある。
また、路面勾配が極めて小さい平坦路において、シフトアップのタイミングが遅いと、燃費が悪化してしまう恐れがある。あるいは、いわゆる「空荷」の場合であって、車両総重量が非常に軽い場合に、シフトアップのタイミングが遅いと、燃費が悪化してしまう恐れがある
【0003】
その他の従来技術として、変速時のトルク変動(変速ショック)を低減する制御装置が提案されている(特許文献1参照)。
しかし、係る従来技術(特許文献1)は、車両の外的要因である路面勾配や車両総重量を考慮した制御を開示するものではなく、上述した問題点を解消することは出来ない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−66759号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、車両の外的要因である路面勾配や車両総重量を考慮した制御を行ない、登坂時の失速や平坦路における燃費の悪化を防止することが出来る機械式自動変速装置の変速制御機構の提供を目的としている。
【課題を解決するための手段】
【0006】
本発明の機械式自動変速装置の変速制御機構(100)は、燃料噴射量検出手段(2)と、燃料噴射制御装置(エンジンコントローラ1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能と、燃料噴射制御装置(1)に制御信号を伝達して選択された燃料噴射量目標値に近づける様に燃料噴射量を制御する機能と、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きG)により今回の変速と次回の変速の時間的間隔(T)を決定する機能を有していることを特徴としている。
【0007】
ここで、前記コントロールユニット(10)により、第1の燃料噴射量目標値(目標燃料噴射量A)と第2の燃料噴射量目標値(目標燃料噴射量B)の何れか一方を選択するかについては、車両の使用や走行状態、その他の条件に起因して、ケース・バイ・ケースで決定することが出来る。
例えば、前記コントロールユニット(10)は、路面勾配がしきい値(α:閾値)以上であり、車両総重量がしきい値(β)未満であれば、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求め、路面勾配がしきい値(α)未満であり、車両総重量がしきい値(β)以上であれば、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能を有しているのが好ましい。
そして、路面勾配がしきい値(α)以上であり、車両総重量もしきい値(β)以上である場合には、第1の燃料噴射量目標値(目標燃料噴射量A)とするか第2の燃料噴射量目標値(目標燃料噴射量B)とするかについては、ケース・バイ・ケースで定められるのが好ましい。
なお本発明において、路面勾配がしきい値(α)未満であり、車両総重量もしきい値(β)未満である場合には、アクセル開度に対応した燃料噴射量が燃料噴射量の目標値(通常の燃料噴射量目標値C:アクセル開度に応じた噴射量)とするのが好ましい。
【0008】
また、本発明において、前記コントロールユニット(10)は、今回の変速と次回の変速の時間的間隔(T)を決定するに際して、燃料噴射量検出手段(2)で検出した情報を元に燃料噴射制御装置(エンジンコントローラ1)で演算された燃料噴射量の時間特性(傾きG)をしきい値(γ)と比較し、しきい値(γ)以上であれば前記時間的間隔(T)を短縮し、しきい値未満であれば前記時間的間隔(T)を延長する機能を有しているのが好ましい。
【発明の効果】
【0009】
上述する構成を具備する本発明によれば、路面勾配をパラメータとして第1の燃料噴射量目標値(目標燃料噴射量A)を求めている(例えば、図2で示す様な特性図を使用して、路面勾配に対応した目標燃料噴射量Aを決定する)。
あるいは、車両総重量をパラメータとして第2の燃料噴射量目標値(目標燃料噴射量B)を求めている(例えば、図3で示す様な特性図を使用して、車両総重量に対応した目標燃料噴射量Bを決定する)。
そのため、車両の外的要因である路面勾配や車両総重量を考慮した制御が実行される。
換言すれば、本発明によれば、路面勾配が急な場合や、車両総重量が大きい場合には、第1の燃料噴射量目標値(目標燃料噴射量A)あるいは第2の燃料噴射量目標値(目標燃料噴射量B)を目標値とする燃料噴射制御が実行されることとなり、通常の燃料噴射量制御(アクセル開度に対応して目標燃料噴射量を決定する制御:ステップS7)に比較して、大量の燃料を噴射して、車両の失速を防止することが出来る。
【0010】
また、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)に基づいて、車両の加速度の値が大きいか小さいかを判断し、当該加速度の数値の大小に基づいて、今回の変速(シフトチェンジ)と次回の変速(シフトチェンジ)の時間的間隔(T)を決定している。そのため、登坂路や車両総重量が大きい場合の様に、加速度の値が小さいと判断される場合には、前記時間的間隔(T)を長く設定して、シフトアップを速く行い過ぎることにより車両が失速してしまう事態を防止する。より具体的には、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)が大きい(しきい値γ以上である)場合には、車両の加速度の値が大きい(加速状態である)と判断して、今回の変速と次回の変速の時間的間隔(T)を短く設定し、早期のシフトアップを可能にして、燃費悪化を防止する。
一方、平坦路である場合や車両総重量が小さい場合の様に、加速度の値が大きいと判断される場合には、前記時間的間隔(T)を短く設定して、シフトアップを速く行い、以って、燃費の悪化を防止する。すなわち、燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性(傾きdq/dt)が小さい(しきい値γ未満である)場合には、加速度の値が小さい状態であると判断して、前記時間的間隔(T)を延長して、早急なシフトアップを抑制して、車両の失速を防止する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態を示すブロック図である。
【図2】路面勾配と燃料噴射量との関係を示す特性図である。
【図3】路面勾配と車両総重量との関係を示す特性図である。
【図4】単位時間当たりの燃料噴射量と経過時間との関係を示す特性図である。
【図5】実施形態における目標燃料噴射量を決定する制御を示すフローチャートである。
【図6】実施形態における変速保留時間の制御を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して、本発明の実施形態について説明する。
先ず、図1を参照して実施形態の構成について説明する。
図1において、全体を符号100で示す変速制御機構は、燃料噴射量検出手段2と、車両総重量検出手段3と、勾配検出手段4と、クラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部Mと、制御手段であるコントロールユニット10を備えている。
図1では、実施形態における制御(後述)とは直接関係の無い構成要素、具体的にはクラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部Mも包含して、図示されている。係る構成要素(クラッチストローク検出手段5と、アクセル開度検出手段6と、エンジン回転数検出手段7と、ギヤ位置検出手段8と、クラッチアクチュエータ9と、表示部M)は、車両の走行について必須である。
【0013】
燃料噴射量検出手段2は、燃料噴射制御装置(以下「エンジンコントローラ」と記載する)1に内蔵されている。
エンジンコントローラ1は、燃料噴射量検出手段2で検出した燃料噴射量情報から、図4の特性図に示すような燃料噴射量の時間特性(傾きdq/dt)を演算する機能を有している。図4において、横軸に変速に要する経過時間をとり、縦軸に単位時間の燃料噴射量をとっている。そして、図4の特性線の傾きが「燃料噴射量検出手段(2)で演算された燃料噴射量の時間特性dq/dt」である。
【0014】
図1において、車両総重量検出手段3は、例えば車軸あるいは懸架系に取り付けられた歪みセンサ(歪ゲージ)等の公知の装置を用いることが出来る。
路面勾配検出手段4についても、例えば車両に取り付けられた傾斜計の様な、公知の装置を用いることが出来る。あるいは、路面勾配検出手段4として、地図情報や道路標識の勾配表示等を、公知の装置(車載カメラやカーナビゲーションシステム等)で読み取り、その情報を用いる機構を採用することも可能である。
【0015】
車両総重量検出手段3は、入力信号ラインSi1によって、コントロールユニット10と接続されている。
勾配検出手段4は、入力信号ラインSi2によって、コントロールユニット10に接続されている。
クラッチストローク検出手段5は、入力信号ラインSi3によって、コントロールユニット10に接続されている。
アクセル開度検出手段6は、入力信号ラインSi4によって、コントロールユニット10に接続されている。
エンジン回転数検出手段7は、入力信号ラインSi5によって、コントロールユニット10に接続されている。
ギヤ位置検出手段8は、入力信号ラインSi6によって、コントロールユニット10に接続されている。
【0016】
また、コントロールユニット10は、制御信号ラインSo1によって、クラッチアクチュエータ9と接続されている。
そしてコントロールユニット10は、制御信号ラインSo2によって、表示部Mと接続されている。
また、双方向信号ラインSioによって、エンジンコントローラ1は、コントロールユニット10と接続されている。
ここで、表示部Mは、例えばインストルメントパネル(図示せず)に設けられた全てのインジケータを、包括的に表現している。
【0017】
コントロールユニット10は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能を有している。
【0018】
図示の実施形態では、コントロールユニット10が第1の燃料噴射量目標値(目標燃料噴射量A)を求めるに際しては、図2で示す様な路面勾配(横軸)と第1の燃料噴射量目標値(縦軸)との関係を示す特性図を使用している。
図2において、勾配検出手段4で検出された勾配が横軸上の符号S1で示されている。コントロールユニット10は、図2の特性線において、勾配S1に対応する縦軸の数値Aを、第1の燃料噴射量目標値(A)として決定する。
ただし、第1の燃料噴射量目標値Aを決定するのに用いられるのは図2で示す様な特性図には限定されない。路面勾配と第1の燃料噴射量目標値の関係を表すテーブル、数式等を用いることも可能である。
【0019】
また、図示の実施形態では、コントロールユニット10が第2の燃料噴射量目標値(目標燃料噴射量B)を求めるに際しては、図3で示す様な車両総重量(横軸)と第2の燃料噴射量目標値(縦軸)との関係を示す特性図を使用している。
図3において、車両総重量検出手段3で検出された車両総重量が横軸上の符号S2で示されている。コントロールユニット10は、図3の特性線において、車両総重量S2に対応する縦軸の数値Bを、第2の燃料噴射量目標値(B)として決定する。
第2の燃料噴射量目標値Bの決定においても、用いられるのは図3で示す様な特性図に限定されない。路面勾配と第2の燃料噴射量目標値の関係を表すテーブル、数式等を用いることも可能である。
【0020】
コントロールユニット10は、エンジンコントローラ1に制御信号を伝達して、燃料噴射量が目標値(燃料噴射量目標値A、B、Cの何れか:図5参照)となる様に燃料噴射量を制御する機能と、燃料噴射量検出手段2で演算された燃料噴射量の時間特性(傾きdq/dt)に基づいて、今回の変速(ギヤチェンジ)と次回の変速(ギヤチェンジ)の時間的間隔(T)を制御する機能を有している。
具体的には、傾きdq/dtがしきい値γ(図6参照)よりも小さいと時間的間隔(T)を長く設定し、しきい値γ(図6参照)よりも大きいと時間的間隔(T)を短く設定する。
【0021】
より詳細には、図1において、コントロールユニット10は、今回の変速と次回の変速の時間的間隔(T)を決定するに際して、燃料噴射量検出手段2で検出した情報に基づいて、燃料噴射制御装置1で燃料噴射量の時間特性(傾きdq/dt)を演算し、求められた傾きdq/dtをしきい値(γ)と比較し、傾きdq/dtがしきい値γ以上であれば加速度の数値が大きい(加速度が大きい)と判断して、前記時間的間隔(T)を短縮する機能を有している。
一方、コントロールユニット10は、傾きdq/dtがしきい値γ未満であれば、加速度の数値が小さい(加速度が小さい)と判断して、前記時間的間隔(T)を延長する機能を有している。
【0022】
図示の実施形態においては、コントロールユニット10において、例えば、コントロールユニット10は、路面勾配がしきい値α以上であり、車両総重量がしきい値β未満であれば、路面勾配と燃料噴射量目標値Aの特性(例えば図2参照)から第1の燃料噴射量目標値(目標燃料噴射量A)を決定する。
一方、路面勾配がしきい値α未満であり、車両総重量がしきい値β以上であれば、車両総重量と燃料噴射量目標値Bの特性(例えば図3参照)から、第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能を有している。
【0023】
図示の実施形態において、路面勾配がしきい値α未満であり、車両総重量もしきい値β未満である場合には、アクセル開度に対応した燃料噴射量が燃料噴射量の目標値(通常の燃料噴射量目標値)となっている。
ここで、路面勾配がしきい値α以上であり、車両総重量もしきい値β以上である場合には、第1の燃料噴射量目標値(目標燃料噴射量A)とするか第2の燃料噴射量目標値(目標燃料噴射量B)とするかについては、車両の仕様、使用状態、その他の条件に基づいて、ケース・バイ・ケースで定められるべきである。
路面勾配に関するしきい値αと、車両総重量のしきい値βと、傾きdq/dtのしきい値γについても、車両の仕様、走行条件、その他に基づいて、ケース・バイ・ケースで定められるべきである。
【0024】
次に、図5に基づいて、目標燃料噴射量を求めるための制御(燃料噴射制御を開始するまでの制御)について説明する。
図5のステップS1では、自動変速装置による変速制御を開始したならば、ステップS2に進み、勾配検出手段4によって路面の勾配を検出すると共に、車両総重量検出手段3によって走行時の車両量総質量を検出する。そして、ステップS3に進む。
ステップS3では、コントロールユニット10は、勾配検出手段4で計測された路面勾配が、しきい値α以上か否かを判断する。
路面勾配がしきい値α以上であれば(ステップS3がYES)、ステップS4に進む。一方、路面勾配がしきい値α未満であれば(ステップS3がNO)、ステップS5に進む。
ここで、しきい値αは、例えば、路面勾配が緩やかで、通常のアクセル操作を行っても車両の減速が目立たない程度の勾配を設定することが出来る。ただし、しきい値αの値は、車両のエンジン特性や、変速機の(仕様)諸元によって、ケース・バイ・ケースで定められる。
【0025】
ステップS4(路面勾配がしきい値α以上:ステップS3がYES)では、目標燃料噴射量A(第1の燃料噴射量目標値)を決定する。目標燃料噴射量Aの決定に際しては、例えば、ステップS2で検出された路面勾配が、図2における符号S1であれば、図2の特性線について、対応する燃料噴射量目標値を、目標燃料噴射量Aとする。目標燃料噴射量Aを決定した後、ステップS8に進む。
図5のステップS5(路面勾配がしきい値α未満:ステップS3がNO)では、コントロールユニット10は、車両総重量検出手段3からの情報によって、車両総重量がしきい値β以上か否かを判断する。
車両総重量がしきい値β以上であれば(ステップS5がYES)、ステップS6に進む。一方、車両総重量がしきい値β未満であれば(ステップS5がNO)、ステップS7に進む。
なお、しきい値βは、例えば、車両総重量が定積載時の質量の値であるが、車両のエンジン特性や、変速機の(仕様)諸元によって、ケース・バイ・ケースで定められる。
【0026】
ステップS6(車両総重量がしきい値β以上:ステップS5がYES)では、目標燃料噴射量B(第2の燃料噴射量目標値)を演算する。目標燃料噴射量Bの決定に際しては、例えば、ステップS2で検出された車両総重量が、図3における符号S2であれば、図3の特性線について、対応する燃料噴射量目標値を、目標燃料噴射量Bとする。目標燃料噴射量Bを決定した後、ステップS8に進む。
【0027】
ステップS7(車両総重量がしきい値β未満:ステップS5がNO)では、目標燃料噴射量Cを決定して、ステップS8に進む。
ここで、目標燃料噴射量Cはいわゆる「通常時の噴射量」であり、アクセル開度に対応した燃料噴射量を意味している。ステップS7では、路面勾配が小さく且つ車両重量も軽量であるため、路面勾配と車両重量を考慮しない制御を行なっても、失火や燃費悪化等の上述した不都合が生じないと考えられるからである。
【0028】
ステップS8では、燃料噴射制御を開始する。すなわち、燃料噴射量を、ステップS4、S6、S7で決定された目標燃料噴射量A、B、Cの何れかにするべく、燃料噴射量制御を行なうのである。
そして、図5の制御を終える。ここで、図5の制御に引き続いて、図5の制御と同一の制御サイクルで、図6の制御が開始される。
【0029】
図5において、ステップS3がステップS5に先行して行われている。
しかし、それとは逆に、ステップS5をステップS3に先行させることが可能である。
或いは、ステップS3とステップS5を同時に行ない、且つ、ステップS4とステップS6を同時に行なうことも可能である。その場合においても、路面勾配がしきい値αよりも小さく、且つ、車両重量もしきい値βよりも小さい場合に、ステップS7に進むことになる。
【0030】
図6の制御において、ステップS11では、エンジンコントローラ1により、図5のステップS8で開始される燃料噴射制御における燃料噴射量の時間的特性(傾きdq/dt:図4参照)を演算する。そして、ステップS12に進む。
ステップS12では、コントロールユニット10は、ステップS11で演算した傾きdq/dtがしきい値γ以上であるか否かを判断する。
ステップS11で演算した傾きdq/dtがしきい値γ以上であれば(ステップS12がYES)、ステップS13に進む。
一方、ステップS11で演算した傾きdq/dtがしきい値未満であれば(ステップS12がNO)、ステップS14に進む。
【0031】
ステップS13(傾きdq/dtがしきい値γ以上:ステップS12がYES)では、燃料が噴射される速度が速く、加速度が大きいと判断して、コントロールユニット10は、次回変速起動までの変速保留時間Tを短縮する。
車両の加速度が大きければ、シフトアップを早期に行っても失火を起こす恐れがなく、また、加速度が大きいにも拘らずシフトアップしなければ燃費が悪化してしまう。そのため、傾きdq/dtがしきい値γ以上であるステップS13では、今回の変速と次回の変速の時間的間隔(T)を短く設定するのである。そして、その時点の制御サイクルを終了する。
【0032】
ステップS14(傾きdq/dtがしきい値未満:ステップS12がNO)では、燃料が噴射される速度が遅く、加速度が小さいと判断して、コントロールユニット10は、次回変速起動までの変速保留時間Tを延長する。
車両の加速度が小さければ、シフトアップを早期に行うと失火を起こす恐れがある。そのため、傾きdq/dtがしきい値γ未満であるステップS14では、今回の変速と次回の変速の時間的間隔(T)を長く設定する。そして、その時点の制御サイクルを終了する。
【0033】
図示の実施形態によれば、路面勾配に基づいて第1の燃料噴射量目標値(目標燃料噴射量A)を求め、車両総重量に基づいて第2の燃料噴射量目標値(目標燃料噴射量B)を求めている。そのため、車両の外的要因である路面勾配や車両総重量を考慮した制御が実行される。
そのため、路面勾配が急な場合や、車両総重量が大きい場合には、第1の燃料噴射量目標値(目標燃料噴射量A)あるいは第2の燃料噴射量目標値(目標燃料噴射量B)を目標値とする燃料噴射制御が実行されることとなり(ステップS4あるいはステップS6)、通常の燃料噴射量制御(ステップS7)に比較して、大量の燃料を噴射して、車両の失速を防止することが出来る。
【0034】
また、燃料噴射量検出手段2で演算された燃料噴射量の時間特性(傾きdq/dt)により、今回の変速と次回の変速の時間的間隔(T)を決定しているので、シフトアップの時期を適正に設定することが出来る。
例えば、燃料噴射量検出手段2で検出された情報を元にエンジンコントローラ1で演算された燃料噴射量の時間特性(傾きdq/dt)が大きい(しきい値γ以上である)場合には、車両が加速状態であると判断して、今回の変速と次回の変速の時間的間隔(T)を短縮して、早急なシフトアップを可能にすることが出来る。これにより、平坦路や空荷時にシフトアップが遅延して、燃費が悪化する事態を防止することが出来る。
一方、当該時間特性(傾きdq/dt)が小さい(しきい値γ未満である)場合には、(車両が登坂しているか、あるいは、車両総重量が大きく)加速が小さい状態であると判断して、前記時間的間隔(T)を延長して、早急なシフトアップを抑制して、登坂時やフル積載時にシフトアップを速く行い過ぎて、車両の失速を防止することが出来る。
【0035】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【符号の説明】
【0036】
1・・・燃料噴射制御装置/エンジンコントローラ
2・・・燃料噴射量検出手段
3・・・車両総重量検出手段
4・・・勾配検出手段
5・・・クラッチストローク検出手段
6・・・アクセル開度検出手段
7・・・エンジン回転数検出手段
8・・・ギヤ位置検出手段
9・・・クラッチアクチュエータ
10・・・制御手段/コントロールユニット
【特許請求の範囲】
【請求項1】
燃料噴射量検出手段と、燃料噴射制御装置と、車両総重量検出手段と、路面勾配検出手段と、コントロールユニットを備え、前記燃料噴射量検出手段は燃料噴射量の時間特性を演算する機能を有しており、前記コントロールユニットは、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能と、燃料噴射制御装置に制御信号を伝達して選択された燃料噴射量目標値に近づける様に燃料噴射量を制御する機能と、燃料噴射量検出手段で演算された燃料噴射量の時間特性により今回の変速と次回の変速の時間的間隔を決定する機能を有していることを特徴とする機械式自動変速装置の変速制御機構。
【請求項2】
コントロールユニットは、路面勾配がしきい値以上であり、車両総重量がしきい値未満であれば、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値を求め、路面勾配がしきい値未満であり、車両総重量がしきい値以上であれば、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値を求める機能を有している請求項1の機械式自動変速装置の変速制御機構。
【請求項3】
前記コントロールユニットは、今回の変速と次回の変速の時間的間隔を決定するに際して、燃料噴射量検出手段で検出した情報を元に燃料噴射制御装置で演算された燃料噴射量の時間特性をしきい値と比較し、しきい値以上であれば前記時間的間隔を短縮し、しきい値未満であれば前記時間的間隔を延長する機能を有している請求項1、2の何れか1項の機械式自動変速装置の変速制御機構。
【請求項1】
燃料噴射量検出手段と、燃料噴射制御装置と、車両総重量検出手段と、路面勾配検出手段と、コントロールユニットを備え、前記燃料噴射量検出手段は燃料噴射量の時間特性を演算する機能を有しており、前記コントロールユニットは、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値を求める機能と、第1及び第2の燃料噴射量目標値から何れか一方を選択する機能と、燃料噴射制御装置に制御信号を伝達して選択された燃料噴射量目標値に近づける様に燃料噴射量を制御する機能と、燃料噴射量検出手段で演算された燃料噴射量の時間特性により今回の変速と次回の変速の時間的間隔を決定する機能を有していることを特徴とする機械式自動変速装置の変速制御機構。
【請求項2】
コントロールユニットは、路面勾配がしきい値以上であり、車両総重量がしきい値未満であれば、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値を求め、路面勾配がしきい値未満であり、車両総重量がしきい値以上であれば、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値を求める機能を有している請求項1の機械式自動変速装置の変速制御機構。
【請求項3】
前記コントロールユニットは、今回の変速と次回の変速の時間的間隔を決定するに際して、燃料噴射量検出手段で検出した情報を元に燃料噴射制御装置で演算された燃料噴射量の時間特性をしきい値と比較し、しきい値以上であれば前記時間的間隔を短縮し、しきい値未満であれば前記時間的間隔を延長する機能を有している請求項1、2の何れか1項の機械式自動変速装置の変速制御機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−108472(P2013−108472A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255931(P2011−255931)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003908)UDトラックス株式会社 (1,028)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003908)UDトラックス株式会社 (1,028)
【Fターム(参考)】
[ Back to top ]