
機械的ガイドを有する面積変化型静電容量式センサ
【課題】面積変化型静電容量式センサのおいて初期の整列誤差を補正し、駆動時の整列誤差を減少させるようにする。
【解決手段】固定物体上に伝導性パターン14が形成される固定要素10と、移動物体上に伝導性パターン24が前記固定要素10の伝導性パターン14と対向するように配置されて前記固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、前記固定要素10と移動要素20とが常に密着した状態を維持バネ要素30と、前記固定要素10と移動要素間20の静電容量の変化によって出力信号を発生させるための電源と、信号検出回路とを備えた面積変化型静電容量式センサにおいて、前記固定要素10及び前記移動要素20の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段とを含む。
【解決手段】固定物体上に伝導性パターン14が形成される固定要素10と、移動物体上に伝導性パターン24が前記固定要素10の伝導性パターン14と対向するように配置されて前記固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、前記固定要素10と移動要素20とが常に密着した状態を維持バネ要素30と、前記固定要素10と移動要素間20の静電容量の変化によって出力信号を発生させるための電源と、信号検出回路とを備えた面積変化型静電容量式センサにおいて、前記固定要素10及び前記移動要素20の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は機械的ガイドを有する面積変化型静電容量式センサに関し、更に詳しくは、面積変化型静電容量式センサのギャップを容易に維持し、センサの整列誤差を補正するようにガイド手段を有する面積変化型静電容量式センサに関する。
【背景技術】
【0002】
周知のように、面積変化型静電容量式センサは微小線形変位の測定のためのものであって、2枚の伝導性平板間の変位変化に相応する静電容量(capacitance)の変化を電気的な信号として出力するセンサである。
【0003】
このような面積変化型静電容量式センサは、2枚の伝導性平板を平行に対向するように位置させた時、2枚の平板間の静電容量は2枚の平板間の媒質の誘電率と向かい合う2枚の平板の面積に比例し、2枚の平板の間隔(ギャップ)に反比例する値に近似化される。即ち、2枚の平板の間で相対的移動が発生し、2枚の平板間の間隔や重なる面積が変化することにより、静電容量も変わるので、このような現象を変位測定の原理として利用する。
【0004】
従って、静電容量式センサは、その測定原理によって2種類に区分され、その1つは物体の移動時に向かい合う2枚の平板間の垂直方向へのギャップの変化を測定するものであり、もう1つは物体の移動によって向かい合う板が平行な方向に動く時に移動した板の面積変化を測定するものであって、これと関連した内容は下記の非特許文献1に詳細に説明されている。
【0005】
一方、これまでの微小変位の測定には変位による非常に高い敏感度を利用でき、比較的に単純な構造を有するという長所のため、主に空間(ギャップ)変化測定方式が用いられてきたが、この方式は変位が大きくなるほど、敏感度が非線形的に急激に減少して測定可能な変位の範囲が極めて制約的であり、機械的な設置誤差に敏感なため、設置に細心な注意が必要であり、特に駆動方向(水平方向)と測定方向(垂直方向)とが一致していないことから発生し得るabbe誤差、コサイン誤差などにより測定の信頼性が低下すると共に、構成の空間活用性が低いという問題があった。
【0006】
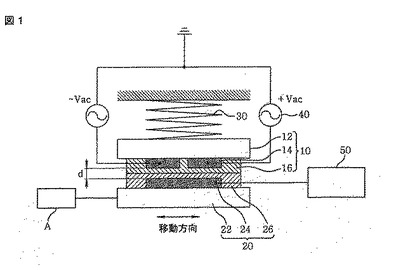
これにより、下記の特許文献1には接触式電気容量型センサ(contact-type electric capacitive displacement sensor)が開示されており、このような接触式電気容量型センサは、図1に示すように、固定物体12上に伝導性パターン14が形成され、その伝導性パターン14を薄い絶縁膜16で均一にコーティングした固定要素10と、この固定要素10と同様に、移動物体22上に伝導性パターン24が形成され、その伝導性パターン24を薄い絶縁膜26で均一にコーティングすることによって、この絶縁膜26が固定要素10の絶縁膜16と当接するように配置されて固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、固定要素10と移動要素20とが常に密着した状態を維持するように固定要素10又は移動要素20のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素30と、固定要素10と移動要素20間の電気容量の変化によって出力信号を発生させることができるように固定要素10又は移動要素20のいずれか1つの伝導性パターン14、24に供給される交流電源40と、固定要素10と移動要素20間の電気容量の変化を検出して電気的信号として出力するように交流電源40が印加されない固定要素10又は移動要素20の伝導性パターン14、24に連結される信号検出回路50と、移動要素20を固定要素10に対して相対的に平行移動させて変位を変化させるように移動要素20に連結される駆動器Aとを含むことによって、機械的な設置誤差及び駆動方向と測定方向の不一致による誤差を減少させることができ、駆動方向以外の変位誤差が含まれる余地がないため、信頼性の高い測定が可能であり、駆動方向と測定方向が一致するので、構成時に空間を節約でき、微小変位の測定はもちろん、広い範囲の変位測定も安定的に行うことができ、終局的に全般的な性能を大幅に向上させた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】韓国特許第10−0547275号明細書
【非特許文献】
【0008】
【非特許文献1】Baxter、「capacitive sensors(容量型センサ)」、IEEE出版社(米国ニューヨーク)、1997年、第3章
【発明の概要】
【発明が解決しようとする課題】
【0009】
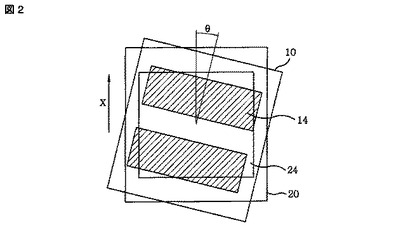
前記特許文献1の場合、固定及び移動物体10、20の表面の各絶縁膜16、26をコーティングした伝導性パターン14、24(以下、電極)が互いに接触した状態で平行相対運動を行うことによって、各絶縁膜16、26がコーティングされた分量に該当するギャップdが生成され、更に、コーティングされた伝導性パターン14、24が破損及び変形しない限り、上下電極に若干の垂直圧力を加えることによって、ギャップを一定に維持できるようになる。しかしながら、設置時に発生した相対角度θとθだけ回転された方向に駆動するようにするヨー(yaw)方向のabbe誤差を意味する「初期整列誤差」、即ち、ヨー誤差の場合、図2に示すように、単純にθだけの誤差が発生した形態の状態でX方向に駆動されるのではなく、微細な誤差の場合にも誤差が発生した方向にabbe誤差を更に誘発する。たとえ、直接abbe誤差を誘発しなくても既に発生しているabbe誤差の確認が難しく、駆動時には間隔及び回転誤差が発生するという問題があり、更に、このような誤差を補正し難いという問題がある。
【0010】
そこで、本発明は上記事情に鑑みてなされたものであって、その目的は、初期の整列誤差を補正し、駆動時の整列誤差を減少させるように機械的ガイドを有する面積変化型静電容量式センサを提供することにある。
【課題を解決するための手段】
【0011】
前記目的を達成するために本発明の機械的ガイドを有する面積変化型静電容量式センサは、面積変化型静電容量式センサであって、固定物体上に伝導性パターンが形成される固定要素と、移動物体上に伝導性パターンが前記固定要素の伝導性パターンと対向するように配置されて前記固定要素に対して相対的に平行移動されて重なる面積を変化させる移動要素と、前記固定要素と移動要素とが常に密着した状態を維持するように前記固定要素又は移動要素のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素と、前記固定要素と移動要素間の電気容量の変化によって出力信号を発生させることができるように前記固定要素又は移動要素のいずれか1つの伝導性パターンに供給される電源と、前記固定要素と移動要素間の電気容量の変化を検出して電気的信号として出力するように前記電源が印加されない前記固定要素又は移動要素の伝導性パターンに連結される信号検出回路と、前記固定要素及び前記移動要素の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段とを含む。
【発明の効果】
【0012】
本発明によれば、相対的に製作が簡単でありながらも、高解像度を得ることができる静電容量式センサの初期の整列誤差がガイドラインにより補正され、駆動時の整列誤差が減少するので、静電容量式センサをフィードバックセンサとして用いる超精密なポジショナ及びこれを応用した製品群に適用可能であり、長い行程区間を精密に制御しなければならないシステムのフィードバックセンサとしても適用可能であるという効果を奏する。
【図面の簡単な説明】
【0013】
【図1】従来の接触式電気容量型センサを示す概略構成図である。
【図2】整列誤差を説明する概念図である。
【図3A】本発明の好適な第1実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図3B】第1実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図4A】本発明の第2実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図4B】第2実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図5】図4BのA−A線に沿った断面図である。
【図6A】本発明の第3実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図6B】第3実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図7】図6BのB−B線に沿った断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の好適な実施形態を添付の図面を参照して本発明の技術分野において通常の知識を有する者が容易に実施できるように更に詳細に説明する。なお、従来と同じ構成要素には同じ参照番号を併記し、その詳細な説明を省略する。
【0015】
図3A〜図7は、本発明の好適な実施形態によって機械的ガイドを有する面積変化型静電容量式センサの構成を概略的に示している。
【0016】
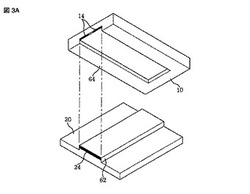
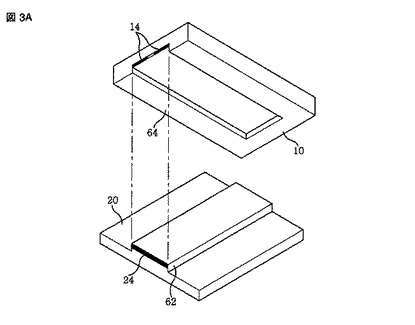
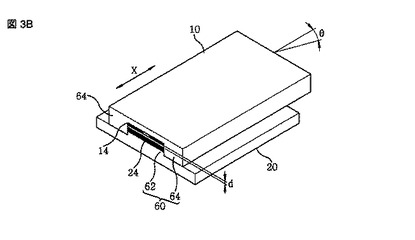
図3A,3Bは、本発明の第1実施形態による面積変化型静電容量式センサを示し、図3Aは、固定要素10と移動要素20の底面を示すように分離された状態であり、図3Bは、結合された状態を示すものである。図示するように、固定物体12(図1)上に伝導性パターン14が形成される固定要素10と、前記固定要素10と同様に、移動物体22(図1)上に伝導性パターン24が前記固定要素10の伝導性パターン14と対向するように配置されて前記固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、前記固定要素10と移動要素20とが常に密着した状態を維持するように前記固定要素10又は移動要素20のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素30と、前記固定要素10と移動要素20間の電気容量の変化によって出力信号を発生させることができるように前記固定要素10又は移動要素20のいずれか1つの伝導性パターン14、24に供給される電源40と、前記固定要素10と移動要素20間の電気容量の変化を検出して電気的信号として出力するように前記電源40が印加されない前記固定要素10又は移動要素20の伝導性パターン14、24に連結される信号検出回路50と、互いに密着する前記固定要素と移動要素それぞれの伝導性パターン間のギャップを維持するように前記駆動方向に形成されたガイド手段を含み、説明の便宜上、バネ手段30と、電源40と、信号検出回路50はその図示を省略した。
【0017】
図3において、ガイド手段60は、移動要素20の中央で所定高さに上方突出した突出部62と、固定要素10で下方突出した一対のガイド突起64からなる。このとき、固定要素10の伝導性パターン14がガイド突起64間の底面に形成され、また移動要素20の伝導性パターン24は突出部62の上面に形成されて突出部62がガイド突起64の間に嵌め込まれた時、移動要素10の突出部62の上面と、ガイド突起64間の固定要素10の底面との間にはギャップdが形成される。
【0018】
このように構成された静電容量式センサは、ガイド突起64の間に突出部62が嵌め込まれる構造であるため、初期整列時のヨー誤差が工程誤差よりは大きくなれないため、機械的にヨー方向の自由度を制限するようになり、また図3Bに示すように、駆動されてもガイド突起64によりガイドされるので、abbe誤差によりθ方向に移動しようとする力が拘束力により防止される。
【0019】
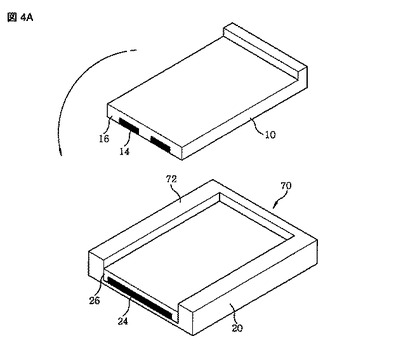
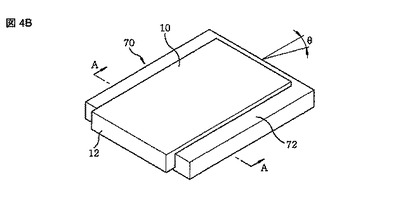
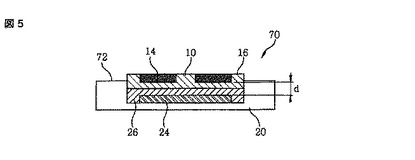
図4A,4Bは、本発明の第2実施形態による面積変化型静電容量式センサを示し、図4Aは、固定要素10と移動要素20の底面を示すように分離された状態であり、図4Bは、結合された状態を示すものである。図示するように、ガイド手段70は移動要素20で所定高さに上方突出した一対のガイド突起72を含み、図5に示すように、固定要素10がガイド突起72の間に嵌め込まれた時、固定要素10の伝導性パターン14と移動要素20の伝導性パターン24との間にギャップが形成されるように各伝導性パターン14、24は薄い絶縁膜16、26により均一にコーティングされる。
【0020】
同様に、図4A,4Bの実施形態もガイド突起72の間に固定要素10を嵌め込む構造であるため、初期整列時のヨー誤差が工程誤差よりは大きくなれないため、機械的にヨー方向の自由度を制限するようになり、また図4Bに示すように、駆動されてもガイド突起72によりガイドされるので、abbe誤差によりθ方向に移動しようとする力が拘束力により防止される。
【0021】
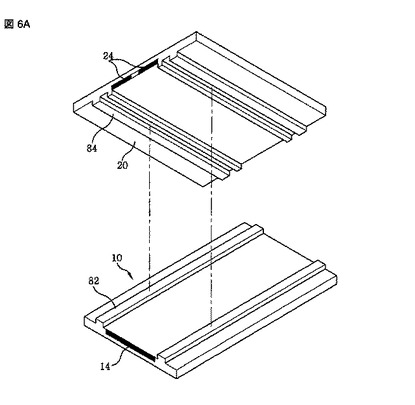
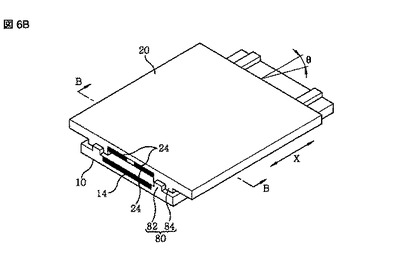
図6A,6Bは、本発明の第3実施形態による面積変化型静電容量式センサを示し、図6Aは、固定要素10の上面と移動要素20の底面を示すように分離された状態であり、図6Bは、結合された状態を示すものであって、図示するように、ガイド手段80は移動要素20で所定高さに上方突出した一対の突出部82と、前記固定要素10で下方突出した二対のガイド突起84からなる。
【0022】
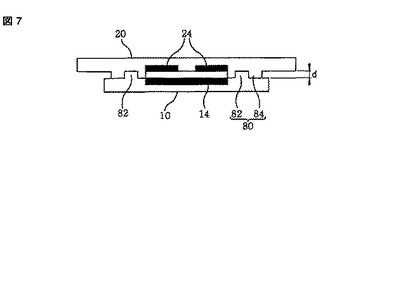
図6A,6Bの実施形態において、図7に示すように、突出部82のそれぞれがガイド突起84のそれぞれに嵌め込まれた時、固定要素10の突出部82間の上面と、各ガイド突起84間の固定要素20の底面との間にギャップが形成されるように固定要素10の伝導性パターン14が各突出部82間の上面に形成され、移動要素20の伝導性パターン24はガイド突起84間の底面に形成されて前記実施形態と同様に作動する。
【0023】
以上のように構成された本発明の面積変化型静電容量式センサは、上下の固定又は移動要素を用いて相対運動を行う他の1つの要素のヨー方向の自由度を制限するものであって、このとき、第1及び第3実施形態の場合、ギャップは突出部の高さ差で調節でき、第2実施形態の場合、ギャップは伝導性パターンを覆う絶縁膜の厚さに該当するので、絶縁膜の厚さで調節できる。
【0024】
従って、ガイド手段がない場合、abbe誤差によりθだけずれた方向に駆動されても確認できなかったが、本発明の面積変化型静電容量式センサは、ガイド手段によりθだけずれた方向に駆動されようとする力を拘束力が発揮されて防止できるようになり、仮りに拘束力が不十分なため、防止できない程度になれば、ガイドが破損するようになるので、abbe誤差が大きく存在するということを確認するようになる。
【0025】
以上で説明した本発明の機械的ガイドを有する面積変化型静電容量式センサは、1つの好適な実施形態に過ぎないものであって、本発明は前記実施形態に限定されないので、以下の特許請求の範囲で請求するように、本発明の要旨を逸脱することなく、当該発明の属する分野において通常の知識を有する者であれば、誰でも多様な変更実施が可能な範囲まで本発明の技術的精神があるといえる。
【符号の説明】
【0026】
10…固定要素、12…固定物体、14…伝導性パターン、16…絶縁膜、20…移動要素、24…伝導性パターン、26…絶縁膜、30…バネ要素、40…電源、50…信号検出回路、60、70、90…ガイド手段、62、82…突出部、64、72、84…ガイド突起。
【技術分野】
【0001】
本発明は機械的ガイドを有する面積変化型静電容量式センサに関し、更に詳しくは、面積変化型静電容量式センサのギャップを容易に維持し、センサの整列誤差を補正するようにガイド手段を有する面積変化型静電容量式センサに関する。
【背景技術】
【0002】
周知のように、面積変化型静電容量式センサは微小線形変位の測定のためのものであって、2枚の伝導性平板間の変位変化に相応する静電容量(capacitance)の変化を電気的な信号として出力するセンサである。
【0003】
このような面積変化型静電容量式センサは、2枚の伝導性平板を平行に対向するように位置させた時、2枚の平板間の静電容量は2枚の平板間の媒質の誘電率と向かい合う2枚の平板の面積に比例し、2枚の平板の間隔(ギャップ)に反比例する値に近似化される。即ち、2枚の平板の間で相対的移動が発生し、2枚の平板間の間隔や重なる面積が変化することにより、静電容量も変わるので、このような現象を変位測定の原理として利用する。
【0004】
従って、静電容量式センサは、その測定原理によって2種類に区分され、その1つは物体の移動時に向かい合う2枚の平板間の垂直方向へのギャップの変化を測定するものであり、もう1つは物体の移動によって向かい合う板が平行な方向に動く時に移動した板の面積変化を測定するものであって、これと関連した内容は下記の非特許文献1に詳細に説明されている。
【0005】
一方、これまでの微小変位の測定には変位による非常に高い敏感度を利用でき、比較的に単純な構造を有するという長所のため、主に空間(ギャップ)変化測定方式が用いられてきたが、この方式は変位が大きくなるほど、敏感度が非線形的に急激に減少して測定可能な変位の範囲が極めて制約的であり、機械的な設置誤差に敏感なため、設置に細心な注意が必要であり、特に駆動方向(水平方向)と測定方向(垂直方向)とが一致していないことから発生し得るabbe誤差、コサイン誤差などにより測定の信頼性が低下すると共に、構成の空間活用性が低いという問題があった。
【0006】
これにより、下記の特許文献1には接触式電気容量型センサ(contact-type electric capacitive displacement sensor)が開示されており、このような接触式電気容量型センサは、図1に示すように、固定物体12上に伝導性パターン14が形成され、その伝導性パターン14を薄い絶縁膜16で均一にコーティングした固定要素10と、この固定要素10と同様に、移動物体22上に伝導性パターン24が形成され、その伝導性パターン24を薄い絶縁膜26で均一にコーティングすることによって、この絶縁膜26が固定要素10の絶縁膜16と当接するように配置されて固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、固定要素10と移動要素20とが常に密着した状態を維持するように固定要素10又は移動要素20のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素30と、固定要素10と移動要素20間の電気容量の変化によって出力信号を発生させることができるように固定要素10又は移動要素20のいずれか1つの伝導性パターン14、24に供給される交流電源40と、固定要素10と移動要素20間の電気容量の変化を検出して電気的信号として出力するように交流電源40が印加されない固定要素10又は移動要素20の伝導性パターン14、24に連結される信号検出回路50と、移動要素20を固定要素10に対して相対的に平行移動させて変位を変化させるように移動要素20に連結される駆動器Aとを含むことによって、機械的な設置誤差及び駆動方向と測定方向の不一致による誤差を減少させることができ、駆動方向以外の変位誤差が含まれる余地がないため、信頼性の高い測定が可能であり、駆動方向と測定方向が一致するので、構成時に空間を節約でき、微小変位の測定はもちろん、広い範囲の変位測定も安定的に行うことができ、終局的に全般的な性能を大幅に向上させた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】韓国特許第10−0547275号明細書
【非特許文献】
【0008】
【非特許文献1】Baxter、「capacitive sensors(容量型センサ)」、IEEE出版社(米国ニューヨーク)、1997年、第3章
【発明の概要】
【発明が解決しようとする課題】
【0009】
前記特許文献1の場合、固定及び移動物体10、20の表面の各絶縁膜16、26をコーティングした伝導性パターン14、24(以下、電極)が互いに接触した状態で平行相対運動を行うことによって、各絶縁膜16、26がコーティングされた分量に該当するギャップdが生成され、更に、コーティングされた伝導性パターン14、24が破損及び変形しない限り、上下電極に若干の垂直圧力を加えることによって、ギャップを一定に維持できるようになる。しかしながら、設置時に発生した相対角度θとθだけ回転された方向に駆動するようにするヨー(yaw)方向のabbe誤差を意味する「初期整列誤差」、即ち、ヨー誤差の場合、図2に示すように、単純にθだけの誤差が発生した形態の状態でX方向に駆動されるのではなく、微細な誤差の場合にも誤差が発生した方向にabbe誤差を更に誘発する。たとえ、直接abbe誤差を誘発しなくても既に発生しているabbe誤差の確認が難しく、駆動時には間隔及び回転誤差が発生するという問題があり、更に、このような誤差を補正し難いという問題がある。
【0010】
そこで、本発明は上記事情に鑑みてなされたものであって、その目的は、初期の整列誤差を補正し、駆動時の整列誤差を減少させるように機械的ガイドを有する面積変化型静電容量式センサを提供することにある。
【課題を解決するための手段】
【0011】
前記目的を達成するために本発明の機械的ガイドを有する面積変化型静電容量式センサは、面積変化型静電容量式センサであって、固定物体上に伝導性パターンが形成される固定要素と、移動物体上に伝導性パターンが前記固定要素の伝導性パターンと対向するように配置されて前記固定要素に対して相対的に平行移動されて重なる面積を変化させる移動要素と、前記固定要素と移動要素とが常に密着した状態を維持するように前記固定要素又は移動要素のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素と、前記固定要素と移動要素間の電気容量の変化によって出力信号を発生させることができるように前記固定要素又は移動要素のいずれか1つの伝導性パターンに供給される電源と、前記固定要素と移動要素間の電気容量の変化を検出して電気的信号として出力するように前記電源が印加されない前記固定要素又は移動要素の伝導性パターンに連結される信号検出回路と、前記固定要素及び前記移動要素の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段とを含む。
【発明の効果】
【0012】
本発明によれば、相対的に製作が簡単でありながらも、高解像度を得ることができる静電容量式センサの初期の整列誤差がガイドラインにより補正され、駆動時の整列誤差が減少するので、静電容量式センサをフィードバックセンサとして用いる超精密なポジショナ及びこれを応用した製品群に適用可能であり、長い行程区間を精密に制御しなければならないシステムのフィードバックセンサとしても適用可能であるという効果を奏する。
【図面の簡単な説明】
【0013】
【図1】従来の接触式電気容量型センサを示す概略構成図である。
【図2】整列誤差を説明する概念図である。
【図3A】本発明の好適な第1実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図3B】第1実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図4A】本発明の第2実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図4B】第2実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図5】図4BのA−A線に沿った断面図である。
【図6A】本発明の第3実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が分離された状態を示す斜視図である。
【図6B】第3実施形態による機械的ガイドを有する面積変化型静電容量式センサの固定要素と移動要素が結合された状態を示す斜視図である。
【図7】図6BのB−B線に沿った断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の好適な実施形態を添付の図面を参照して本発明の技術分野において通常の知識を有する者が容易に実施できるように更に詳細に説明する。なお、従来と同じ構成要素には同じ参照番号を併記し、その詳細な説明を省略する。
【0015】
図3A〜図7は、本発明の好適な実施形態によって機械的ガイドを有する面積変化型静電容量式センサの構成を概略的に示している。
【0016】
図3A,3Bは、本発明の第1実施形態による面積変化型静電容量式センサを示し、図3Aは、固定要素10と移動要素20の底面を示すように分離された状態であり、図3Bは、結合された状態を示すものである。図示するように、固定物体12(図1)上に伝導性パターン14が形成される固定要素10と、前記固定要素10と同様に、移動物体22(図1)上に伝導性パターン24が前記固定要素10の伝導性パターン14と対向するように配置されて前記固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、前記固定要素10と移動要素20とが常に密着した状態を維持するように前記固定要素10又は移動要素20のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素30と、前記固定要素10と移動要素20間の電気容量の変化によって出力信号を発生させることができるように前記固定要素10又は移動要素20のいずれか1つの伝導性パターン14、24に供給される電源40と、前記固定要素10と移動要素20間の電気容量の変化を検出して電気的信号として出力するように前記電源40が印加されない前記固定要素10又は移動要素20の伝導性パターン14、24に連結される信号検出回路50と、互いに密着する前記固定要素と移動要素それぞれの伝導性パターン間のギャップを維持するように前記駆動方向に形成されたガイド手段を含み、説明の便宜上、バネ手段30と、電源40と、信号検出回路50はその図示を省略した。
【0017】
図3において、ガイド手段60は、移動要素20の中央で所定高さに上方突出した突出部62と、固定要素10で下方突出した一対のガイド突起64からなる。このとき、固定要素10の伝導性パターン14がガイド突起64間の底面に形成され、また移動要素20の伝導性パターン24は突出部62の上面に形成されて突出部62がガイド突起64の間に嵌め込まれた時、移動要素10の突出部62の上面と、ガイド突起64間の固定要素10の底面との間にはギャップdが形成される。
【0018】
このように構成された静電容量式センサは、ガイド突起64の間に突出部62が嵌め込まれる構造であるため、初期整列時のヨー誤差が工程誤差よりは大きくなれないため、機械的にヨー方向の自由度を制限するようになり、また図3Bに示すように、駆動されてもガイド突起64によりガイドされるので、abbe誤差によりθ方向に移動しようとする力が拘束力により防止される。
【0019】
図4A,4Bは、本発明の第2実施形態による面積変化型静電容量式センサを示し、図4Aは、固定要素10と移動要素20の底面を示すように分離された状態であり、図4Bは、結合された状態を示すものである。図示するように、ガイド手段70は移動要素20で所定高さに上方突出した一対のガイド突起72を含み、図5に示すように、固定要素10がガイド突起72の間に嵌め込まれた時、固定要素10の伝導性パターン14と移動要素20の伝導性パターン24との間にギャップが形成されるように各伝導性パターン14、24は薄い絶縁膜16、26により均一にコーティングされる。
【0020】
同様に、図4A,4Bの実施形態もガイド突起72の間に固定要素10を嵌め込む構造であるため、初期整列時のヨー誤差が工程誤差よりは大きくなれないため、機械的にヨー方向の自由度を制限するようになり、また図4Bに示すように、駆動されてもガイド突起72によりガイドされるので、abbe誤差によりθ方向に移動しようとする力が拘束力により防止される。
【0021】
図6A,6Bは、本発明の第3実施形態による面積変化型静電容量式センサを示し、図6Aは、固定要素10の上面と移動要素20の底面を示すように分離された状態であり、図6Bは、結合された状態を示すものであって、図示するように、ガイド手段80は移動要素20で所定高さに上方突出した一対の突出部82と、前記固定要素10で下方突出した二対のガイド突起84からなる。
【0022】
図6A,6Bの実施形態において、図7に示すように、突出部82のそれぞれがガイド突起84のそれぞれに嵌め込まれた時、固定要素10の突出部82間の上面と、各ガイド突起84間の固定要素20の底面との間にギャップが形成されるように固定要素10の伝導性パターン14が各突出部82間の上面に形成され、移動要素20の伝導性パターン24はガイド突起84間の底面に形成されて前記実施形態と同様に作動する。
【0023】
以上のように構成された本発明の面積変化型静電容量式センサは、上下の固定又は移動要素を用いて相対運動を行う他の1つの要素のヨー方向の自由度を制限するものであって、このとき、第1及び第3実施形態の場合、ギャップは突出部の高さ差で調節でき、第2実施形態の場合、ギャップは伝導性パターンを覆う絶縁膜の厚さに該当するので、絶縁膜の厚さで調節できる。
【0024】
従って、ガイド手段がない場合、abbe誤差によりθだけずれた方向に駆動されても確認できなかったが、本発明の面積変化型静電容量式センサは、ガイド手段によりθだけずれた方向に駆動されようとする力を拘束力が発揮されて防止できるようになり、仮りに拘束力が不十分なため、防止できない程度になれば、ガイドが破損するようになるので、abbe誤差が大きく存在するということを確認するようになる。
【0025】
以上で説明した本発明の機械的ガイドを有する面積変化型静電容量式センサは、1つの好適な実施形態に過ぎないものであって、本発明は前記実施形態に限定されないので、以下の特許請求の範囲で請求するように、本発明の要旨を逸脱することなく、当該発明の属する分野において通常の知識を有する者であれば、誰でも多様な変更実施が可能な範囲まで本発明の技術的精神があるといえる。
【符号の説明】
【0026】
10…固定要素、12…固定物体、14…伝導性パターン、16…絶縁膜、20…移動要素、24…伝導性パターン、26…絶縁膜、30…バネ要素、40…電源、50…信号検出回路、60、70、90…ガイド手段、62、82…突出部、64、72、84…ガイド突起。
【特許請求の範囲】
【請求項1】
面積変化型静電容量式センサであって、
固定物体上に伝導性パターンが形成される固定要素と、
移動物体上に伝導性パターンが前記固定要素の伝導性パターンと対向するように配置されて前記固定要素に対して相対的に平行移動されて重なる面積を変化させる移動要素と、
前記固定要素と移動要素とが常に密着した状態を維持するように前記固定要素又は移動要素のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素と、
前記固定要素と移動要素間の電気容量の変化によって出力信号を発生させることができるように前記固定要素又は移動要素のいずれか1つの伝導性パターンに供給される電源と、
前記固定要素と移動要素間の電気容量の変化を検出して電気的信号として出力するように前記電源が印加されない前記固定要素又は移動要素の伝導性パターンに連結される信号検出回路と、
前記固定要素及び前記移動要素の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段と
を含む機械的ガイドを有する面積変化型静電容量式センサ。
【請求項2】
前記ガイド手段は前記移動要素の中央で所定高さに上方突出した突出部と、前記固定要素で下方突出した一対のガイド突起からなり、
前記突出部がガイド突起の間に嵌め込まれた時、前記移動要素の突出部の上面と前記ガイド突起間の固定要素の底面との間にギャップが形成されるように前記固定要素の伝導性パターンが前記ガイド突起間の底面に、前記移動要素の伝導性パターンは前記突出部の上面に形成されることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【請求項3】
前記ガイド手段は前記移動要素で所定高さに上方突出した一対のガイド突起を含み、
前記固定要素が前記ガイド突起の間に嵌め込まれた時、前記固定要素の伝導性パターンと前記移動要素の伝導性パターンとの間にギャップが形成されるように前記各伝導性パターンは薄い絶縁膜により均一にコーティングされることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【請求項4】
前記ガイド手段は前記移動要素で所定高さに上方突出した一対の突出部と、前記固定要素で下方突出した二対のガイド突起からなり、
前記突出部のそれぞれがガイド突起のそれぞれに嵌め込まれた時、前記移動要素の突出部間の上面と前記各ガイド突起間の固定要素の底面との間にギャップが形成されるように前記固定要素の伝導性パターンが前記各ガイド突起間の底面に、前記移動要素の伝導性パターンは前記突出部間の上面に形成されることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【請求項1】
面積変化型静電容量式センサであって、
固定物体上に伝導性パターンが形成される固定要素と、
移動物体上に伝導性パターンが前記固定要素の伝導性パターンと対向するように配置されて前記固定要素に対して相対的に平行移動されて重なる面積を変化させる移動要素と、
前記固定要素と移動要素とが常に密着した状態を維持するように前記固定要素又は移動要素のいずれか1つを他の1つに対して密着させる密着力を駆動方向に対して垂直な方向に提供するバネ要素と、
前記固定要素と移動要素間の電気容量の変化によって出力信号を発生させることができるように前記固定要素又は移動要素のいずれか1つの伝導性パターンに供給される電源と、
前記固定要素と移動要素間の電気容量の変化を検出して電気的信号として出力するように前記電源が印加されない前記固定要素又は移動要素の伝導性パターンに連結される信号検出回路と、
前記固定要素及び前記移動要素の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段と
を含む機械的ガイドを有する面積変化型静電容量式センサ。
【請求項2】
前記ガイド手段は前記移動要素の中央で所定高さに上方突出した突出部と、前記固定要素で下方突出した一対のガイド突起からなり、
前記突出部がガイド突起の間に嵌め込まれた時、前記移動要素の突出部の上面と前記ガイド突起間の固定要素の底面との間にギャップが形成されるように前記固定要素の伝導性パターンが前記ガイド突起間の底面に、前記移動要素の伝導性パターンは前記突出部の上面に形成されることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【請求項3】
前記ガイド手段は前記移動要素で所定高さに上方突出した一対のガイド突起を含み、
前記固定要素が前記ガイド突起の間に嵌め込まれた時、前記固定要素の伝導性パターンと前記移動要素の伝導性パターンとの間にギャップが形成されるように前記各伝導性パターンは薄い絶縁膜により均一にコーティングされることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【請求項4】
前記ガイド手段は前記移動要素で所定高さに上方突出した一対の突出部と、前記固定要素で下方突出した二対のガイド突起からなり、
前記突出部のそれぞれがガイド突起のそれぞれに嵌め込まれた時、前記移動要素の突出部間の上面と前記各ガイド突起間の固定要素の底面との間にギャップが形成されるように前記固定要素の伝導性パターンが前記各ガイド突起間の底面に、前記移動要素の伝導性パターンは前記突出部間の上面に形成されることを特徴とする請求項1に記載の機械的ガイドを有する面積変化型静電容量式センサ。
【図1】


【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【図7】
【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【図7】
【公開番号】特開2009−282031(P2009−282031A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2009−125199(P2009−125199)
【出願日】平成21年5月25日(2009.5.25)
【出願人】(505282042)ポステック・アカデミー‐インダストリー・ファウンデーション (34)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成21年5月25日(2009.5.25)
【出願人】(505282042)ポステック・アカデミー‐インダストリー・ファウンデーション (34)
【Fターム(参考)】
[ Back to top ]