
櫛歯型プローブ、これを備える原子間力顕微鏡装置および変位測定方法
【課題】 製品ばらつきが小さく、製品歩留まりが高い櫛歯型プローブを提供すること。
【解決手段】 櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。櫛歯ドライブ10aは、静止部1の櫛歯状凹凸部と可動部2の櫛歯状凹凸部とが非接触で噛合し、交流電源7によって与えられる静電力により可動部2がZ方向に振動する。櫛歯型プローブ10は、可動部2を励振するのに圧電体層のような機能性薄膜を用いないので、製品歩留まりが高い。可動部2が外力(探針3−試料S間の原子間力)の影響を受けると、櫛歯ドライブ10aのアドミッタンスが変化する。アドミッタンス検出器20によりアドミッタンスを検出し、この検出値から可動部2の変位量を求める。
【解決手段】 櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。櫛歯ドライブ10aは、静止部1の櫛歯状凹凸部と可動部2の櫛歯状凹凸部とが非接触で噛合し、交流電源7によって与えられる静電力により可動部2がZ方向に振動する。櫛歯型プローブ10は、可動部2を励振するのに圧電体層のような機能性薄膜を用いないので、製品歩留まりが高い。可動部2が外力(探針3−試料S間の原子間力)の影響を受けると、櫛歯ドライブ10aのアドミッタンスが変化する。アドミッタンス検出器20によりアドミッタンスを検出し、この検出値から可動部2の変位量を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、櫛歯型プローブ、これを備える原子間力顕微鏡装置および変位測定方法に関する。
【背景技術】
【0002】
カンチレバーに設けられた探針と試料との微視的距離を測定する方法として、カンチレバー表面に圧電体層と電極膜との多層構造をもつアクチュエータを形成し、そのアクチュエータでカンチレバーをその固有振動数で屈曲振動させ、圧電体素子のアドミッタンス変化を検出する方法が知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平6−194157号公報(第2頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
圧電体の成分比や圧電体層の膜厚はカンチレバーの振動状態に影響を及ぼすが、圧電体層をカンチレバー表面に形成する際に、成分比や膜厚を正確に制御するのは難しく、材料による製品のばらつきが発生し易いという問題がある。
【課題を解決するための手段】
【0005】
(1)請求項1に係る櫛歯型プローブは、試料表面の作用に基づく物理量を検出する櫛歯型プローブであって、第1の櫛歯状凹凸部を有する静止部と、第1の櫛歯状凹凸部と噛合する第2の櫛歯状凹凸部を有し、外力により変位する可動部とを備え、可動部の変位を、交流バイアスが発生する静電力により振動する第1および第2の櫛歯状凹凸部から成る移動機構のイミタンスに基づいて算出することを特徴とする。
(2)請求項2の発明は、請求項1に記載の櫛歯型プローブにおいて、静止部および可動部は、フォトリソグラフィー法によりSOIウエハから一体で作製されることを特徴とする。
(3)請求項3の発明は、請求項1または2に記載の櫛歯型プローブと、可動部に設けられる探針と、可動部を励振する交流電源と、可動部が静電力により振動しているとき、イミタンスを検出する検出回路と、検出回路で検出されたイミタンスを一定とするように静止部を駆動する駆動電源とを備えることを特徴とする。
(4)請求項4に係る変位測定方法は、請求項1または2に記載の櫛歯型プローブの移動機構に振動を与え、その共振角周波数ω0を測定する工程と、共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で振動させて可動部に加わる外力が零のときの基準イミタンス値I0を測定する工程と、発振角周波数ω1に定めて振動させ、可動部に外力が加わったときのイミタンス値I1を測定する工程と、イミタンス値の変化量(I1−I0)から、可動部の外力による変位量を算出することを特徴とする。
【発明の効果】
【0006】
本発明の櫛歯型プローブによれば、櫛歯状凹凸部から成る移動機構に働く静電力により可動部を励振する構造であり、圧電体層のような機能性薄膜を有しないので、製造工程がシンプルであり、高い製品歩留まりを実現できる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態による櫛歯型プローブおよび原子間力顕微鏡装置(以下、AFM装置と呼ぶ)について図1〜8を参照しながら説明する。
図1は、本発明の実施の形態によるAFM装置全体の概略を示す構成図である。図2は、図1のAFM装置に用いられる櫛歯型プローブの構造を模式的に示す正面図である。図3は、図2に示す櫛歯型プローブの拡大斜視図である。図1〜図3では、XYZ直交座標で方向を表す。
【0008】
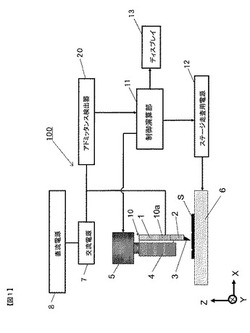
図1に示されるように、AFM装置100は、櫛歯ドライブ10aを有する櫛歯型プローブ10と、櫛歯型プローブ10をZ方向に駆動するピエゾアクチュエータ5と、試料Sを載置してXYZ方向に移動するステージ6とを備えている。櫛歯型プローブ10は、支持部4を介してピエゾアクチュエータ5に固定され、ピエゾアクチュエータ5は、不図示のフレームに固設されている。AFM装置100は、さらに、交流電源7と、直流電源8と、アドミッタンス検出器20と、制御演算部11と、ステージ走査用電源12と、ディスプレイ13とを備えている。
【0009】
交流電源7と直流電源8とは直列に接続され、交流電源7が櫛歯ドライブ10aに電気的に接続されている。アドミッタンス検出器20は、交流電源7と櫛歯ドライブ10aを含む電気回路に接続されるとともに、制御演算部11にも接続されている。制御演算部11は、アドミッタンス検出器20に接続されるとともに、ピエゾアクチュエータ5、ステージ走査用電源12およびディスプレイ13にそれぞれ接続されている。
【0010】
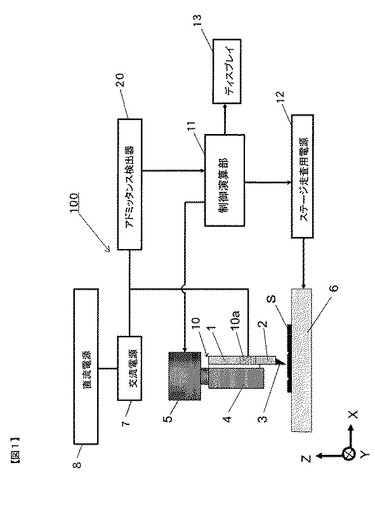
図2および図3に示されるように、櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。静止部1は、支持部4に固定されており、櫛歯状凹凸部1aを有する。可動部2は、枠部2b、ビーム2cを介して支持部4に連結されており、櫛歯状凹凸部2aを有する。櫛歯状凹凸部1a,2aの表面(Y−Z面)には、それぞれ電極膜が成膜されている。櫛歯型プローブ10は、櫛歯状凹凸部1aと2aとが非接触で噛合し、静電力により可動部2がZ方向に移動可能に構成されており、櫛歯状凹凸部1aと2aとから成る移動機構が櫛歯ドライブ10aである。枠部2bは、支持部4に固定されており、細いビーム2cを介して可動部2を支持している。したがって、可動部2が動くときは、ビーム2cがたわみ変形を生じる。
【0011】
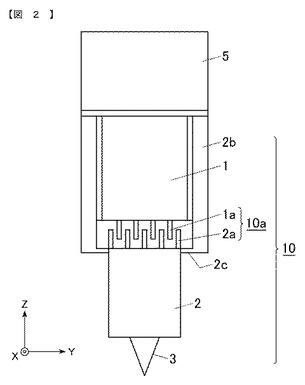
図3を参照して、櫛歯型プローブ10の各構成部品について、材料となるウエハと対比させて説明する。櫛歯型プローブ10は、図6〜8を用いて後述する製造工程により、SOI(Silicon on Insulator)ウエハから一体で作製される。SOIウエハは、2枚のSi単結晶板の一方にSiO2層を形成し、そのSiO2層を介して貼り合わせた3層構造であり、上部Si層、SiO2層および下部Si層を有する。櫛歯状凹凸部1aを含む静止部1、櫛歯状凹凸部2aを含む可動部2および探針3は上部Si層から形成され、支持部4は、SiO2層および下部Si層から形成されている。このように、櫛歯型プローブ10は、櫛歯状凹凸部1a,2aの表面の電極膜以外はすべてSOIウエハから作製される。
【0012】
再び図1を参照すると、櫛歯ドライブ10aには、直流電源8による直流電圧に交流電源7による交流電圧が重畳されたバイアス電圧が印加される。具体的には、櫛歯状凹凸部1aの電極膜と櫛歯状凹凸部2aの電極膜との間に電圧が印加される。直流電圧により櫛歯状凹凸部1aと2aとの距離が規定され、この距離を中立として、交流電圧の振幅と周波数に応じて櫛歯ドライブ10aが動作し、可動部2がZ方向に振動する。櫛歯ドライブ10aの固有振動数で可動部2を振動させると、すなわち共振させると最も効率良く大きな振幅を得ることができる。
【0013】
アドミッタンス検出器20は、交流電圧が加えられている櫛歯ドライブ10aのアドミッタンスを検出し、検出データを制御演算部11へ送出する。制御演算部11は、アドミッタンスの検出値から外力の大きさあるいは外力を及ぼす物体との距離を演算して、演算結果をディスプレイ13に表示する。また、制御演算部11は、演算結果に基づいてピエゾアクチュエータ5を駆動制御したり、ステージ走査用電源12を介してステージ6を移動させる。
【0014】
上記のように構成されたAFM装置100では、探針3が設けられた可動部2を振動させながら探針3を試料Sにナノメーターオーダーで近接させ、探針3と試料Sとの間に働く原子間力を検出するタッピングモードが採用されている。この原子間力は、探針3と試料Sとの距離に依存する物理量であり、原子間力を櫛歯ドライブ10aのアドミッタンスとして検出することができる。本発明のAFM装置100は、アドミッタンス一定、つまり距離一定とするようにピエゾアクチュエータ5をZ方向に駆動しながら探針3と試料SとをX−Y面に沿って相対的に二次元走査することにより、試料S表面の凹凸情報を得るものである。したがって、本発明の櫛歯型プローブ10は、原子間力(外力に相当)を櫛歯ドライブ10aのアドミッタンスとして検出し、その検出値から探針3と試料Sとの距離を求めることができる。
【0015】
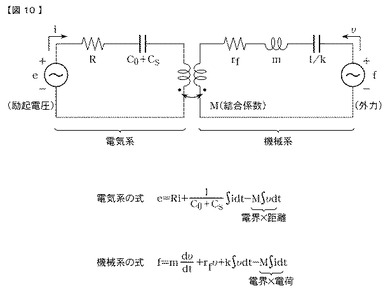
一般に、電気・機械結合系において電気的エネルギーおよび機械的エネルギーの保存則が成立する。図10は、電気・機械結合系の等価回路の概略を示す図であり、公知の電気・機械結合系の解析法を用いて平行平板型アクチュエータのモデル化を行ったものである。これは、外力f、励起電圧eが小さく、変位量、電荷量の変動も小さい条件下で成立する。Mは電気系と機械系の結合係数である。結合係数Mは、ガウスの定理より、M=E0C0/ε0Sと書くことができる。但し、E0は直流バイアス電圧、C0は初期状態のコンデンサ容量、ε0は真空の誘電率、Sは電極面積である。図10に示す電気系の式と機械系の式においては、R、i、v、C0、CSは、それぞれ平行平板型アクチュエータの抵抗、電流、振動速度、初期状態のコンデンサ容量、浮遊容量であり、m、k、rfは、それぞれ平行平板型アクチュエータの等価質量、バネ定数、機械系の摩擦抵抗(機械抵抗)である。
【0016】
上記の平行平板型アクチュエータモデルを基本とすると、櫛歯型のアクチュエータの線形近似基本方程式は、式(1),(2)で表される。
i1=jω(C0+CS)e1+(E0C0/X0)ν1 (1)
f1=jωmν1+rfν1+kν1/jω+E0C0e1/X0 (2)
但し、i1は交流電流値、e1は入力交流電圧の振幅、ν1は可動部2の振動速度であり、f1、m、k、rfは、それぞれ櫛歯ドライブ10aに作用する外力、等価質量、バネ定数、機械系の摩擦抵抗(機械抵抗)である。また、E0は櫛歯ドライブ10aに加わる直流バイアス電圧、C0は初期状態の櫛歯状凹凸部のコンデンサ容量、CSは電極パッド等の浮遊容量、X0は初期状態の櫛歯間距離である。式(1),(2)より、外力が零の場合、櫛歯ドライブ10aのアドミッタンスの絶対値|Y|と角周波数ωの関係は最終的に式(3)のように表すことができる。ここで、A=E0C0/X0と置く。なお、アドミッタンスの絶対値|Y|には、式(3)のようにドットが付いている場合もあるが、|Y|と同じものであり、以下、同様とする。
【数1】

【0017】
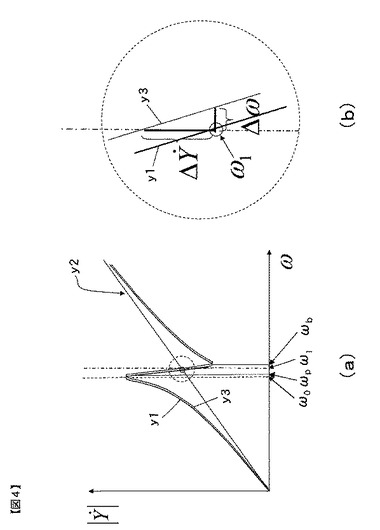
図4は、この実施の形態による櫛歯型プローブのアドミッタンスの角周波数依存性を表すグラフであり、図4(a)はグラフ全体、図4(b)は、図4(a)の円内を拡大して示す図である。式(3)は、図4(a)のアドミッタンス曲線y1で表される。
アドミッタンス曲線y1は、電気・機械結合系の特性曲線であるが、アドミッタンス曲線y2は、機械系がない電気系のみの特性曲線であり、|Y|=ω(C0+CS)で表される。すなわち、アドミッタンス曲線y2は、式(3)において式(4)が成り立つときの特性曲線(実際には、1次関数なので直線)である。
A2−2ω(C0+CS)(ωm−k/ω)=0 (4)
式(4)を満たす角周波数ωを発振角周波数ω1と呼ぶと、発振角周波数ω1は、アドミッタンス曲線y1とy2の交点における角周波数である。発振角周波数ω1は、共振角周波数ω0に近い値であり、発振角周波数ω1で櫛歯ドライブ10aを駆動すると、上述したように、機械系の特性がキャンセルされ、電気系のみのアドミッタンス計測が可能となる。
【0018】
なお、共振角周波数ω0は、アドミッタンス曲線y1のピーク位置より僅かに高いところに位置しており、アドミッタンス曲線y1のピーク角周波数をωp、凹カーブを示す部分のボトムの角周波数をωbとすれば、共振角周波数ω0と発振角周波数ω1との関係は、式(5)で表すことができる。発振角周波数ω1、ピーク角周波数ωp、ボトム角周波数ωbとの間には、2/ω1=1/ωp+1/ωbという関係も導かれる。
【数2】
【0019】
図4(b)を参照すると、発振角周波数ω1で櫛歯ドライブ10aを駆動しているときに、櫛歯ドライブ10aに外力が作用すると、アドミッタンス曲線y1(外力なし)からアドミッタンス曲線y3(外力の作用あり)へと変化する。その結果、図示されるように、発振角周波数ω1におけるアドミッタンスはΔYだけ変化する。可動部2の変位量は、後述するように、アドミッタンス変化の検出値から算出される。従来は、共振角周波数ω0で角周波数のシフト量Δωを検出していたが、アドミッタンス変化ΔYの検出により、さらに高感度の測定が可能となる。
【0020】
なお、櫛歯ドライブ10aに作用する外力の変化は、櫛歯ドライブ10aのバネ定数kが僅かに変化してバネ定数(k+Δk)となったときのアドミッタンスの変化ΔYとして求められる。すなわち、式(3)から導かれる近似式により、発振角周波数ω1でのアドミッタンスの絶対値|Y|とアドミッタンスの変化ΔYは、それぞれ式(6)、式(7)で表される。
|Y|=ω1(C0+CS) (6)
ΔY=A2Δk/ω1rf2 (7)
したがって、アドミッタンスの変化ΔYを検出することにより、バネ定数の変化Δkを求め、結果的に櫛歯ドライブ10aに作用する外力の大きさあるいは可動部2の変位量を求めることができる。
【0021】
本実施の形態の櫛歯型プローブ10では、櫛歯ドライブ10aのアドミッタンスから直接に変位量x1を求めることができる。上述した櫛歯型のアクチュエータの線形近似基本方程式である式(1),(2)において、正弦波駆動の場合は、ν1=jωx1と書けるので、式(1)を変形すると式(8)となる。
i1/e1=jω[C0{1+(x1/X0)(E0/e1)}+CS] (8)
【0022】
式(8)よりアドミッタンスの絶対値|Y|は、式(9)のように書き表せる。
|Y1|=|i1/e1|=ω[C0{1+(x1/X0)(E0/e1)}+CS] (9)
式(9)から変位量x1は式(10)として導かれる。
x1=[{(|Y1|−ωCS)/ωC0−1}](e1/E0)X0 (10)
前述したように、A=E0C0/X0であるから、式(10)を変形して式(11)を得る。
x1=[{(|Y1|−ωCS)/ωC0−1}](C0e1/A) (11)
Y0=ω(C0+CS)とおけば、式(11)を変形して式(12)を得る。
x1={(|Y1|−|Y0|)/ωC0}(C0e1/A)=ΔY/ω(e1/A)
(12)
複数の櫛歯を有するアクチュエータでは、Aは、A=nbE0/dと書ける。ここで、nは櫛歯型プローブ10の櫛歯の数、bは櫛歯の厚さ、dは対向する櫛歯間のギャップである。Y1、Y0、C0、E0、e1は測定から求まり、bはSOIウエハの上部Si層の厚さに等しく、dはSEM観察により実測できるので、変位量x1が算出できる。なお、櫛歯間のギャップdには設計値があるが、その設計値と製造プロセス後に実測した値とが異なる場合は、後者を用いる方がAの値を正確に得ることができる。
【0023】
以上をまとめると、可動部2の変位量算出手順は次のとおりである。
(1)櫛歯型プローブ10の櫛歯ドライブ10aに振動を与え、その共振角周波数ω0を測定する。
(2)共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で櫛歯ドライブ10aを振動させて可動部2に加わる外力が零のときの基準アドミッタンス値|Y0|を検出する。
(3)角周波数ωを発振角周波数ω1に定めて櫛歯ドライブ10aに振動を与え、可動部2に外力が加わったときのアドミッタンス値|Y1|を検出する。
(4)アドミッタンスの変化ΔY(=|Y1|−|Y0|)から、可動部2の外力による変位量を算出する。
【0024】
アドミッタンス検出器を用いたアドミッタンス|Y|の検出について具体的に説明する。
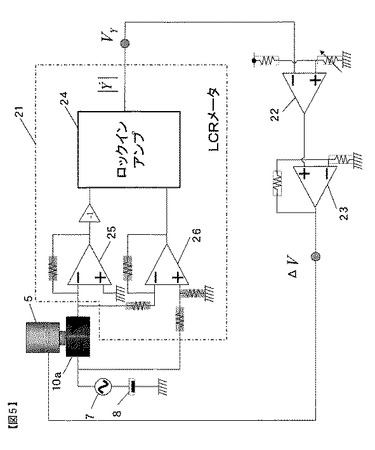
図5は、実施の形態による櫛歯型プローブ10のアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。アドミッタンスを検出するLCRメータ21は、ロックインアンプ24と、電流測定用回路25と、電圧測定用回路26とを有する。
【0025】
櫛歯ドライブ10aには交流電圧が加えられており、電流測定用回路25により櫛歯ドライブ10aの電流の絶対値と位相が測定され、電圧測定用回路26により櫛歯ドライブ10aの電圧の絶対値と位相が測定される。これら2つの物理量の絶対値と位相からアドミッタンスの絶対値|Y|と位相をロックインアンプ24で演算する。LCRメータ21からアドミッタンスの絶対値|Y|に比例する電圧VYを出力し、比較器22で電圧VYを基準電圧と比較する。ここで、基準電圧とは、図4(a)に示す発振角周波数ω1におけるアドミッタンスに対応する電圧である。電圧VYと基準電圧との偏差分は、電圧ブースター23で増幅されて電圧信号ΔVとなり、ピエゾアクチュエータ5へフィードバックされる。そのピエゾアクチュエータ5の駆動量が可動部2の変位量に対応する。
【0026】
次に、本実施の形態の櫛歯型プローブ10の製造工程について、図6〜8を参照しながら詳しく説明する。
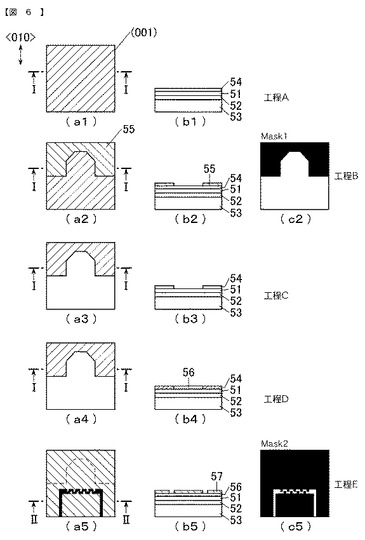
図6は、工程A〜Eにおける櫛歯型プローブ10の状態を示す図であり、図6(a1)〜図6(a5)はそれぞれ工程A〜Eにおける櫛歯型プローブ10の平面図、図6(b1)〜図6(b5)はそれぞれ工程A〜Eにおける櫛歯型プローブ10の断面図、図6(c2)、図6(c5)はそれぞれ工程B、Eで用いられるマスクであり、図中、白い領域が遮蔽部分である。なお、図6(b1)〜図6(b4)はI−I線断面図、図6(b5)はII−II線断面図である。
【0027】
工程Aでは、上述した3層構造のSOIウエハの上部Si層51の表面に、低圧CVDにより厚さ50nmの窒化珪素(SiN)膜54を形成する。なお、上部Si層51の表面を単結晶Siの主面(001)とし、図中、上下方向を<010>とする。
工程Bでは、図6(c2)に示すマスク1を用い、SiN膜54の表面にフォトリソグラフィーでレジスト層55を形成する。
【0028】
工程Cでは、レジスト層55をマスクとしてSiN膜54を部分除去する。
工程Dでは、上部Si層51が露出している領域に表面保護のための酸化膜56を厚さ0.5μm形成する。酸化方法は、高温の酸化雰囲気で加熱する熱酸化である。
工程Eでは、図6(c5)に示すマスク2を用い、酸化膜56の表面にフォトリソグラフィーでレジスト層57を形成する。図6(a5)の矢印Aで示す凹凸パターン部分は、将来、櫛歯状凹凸部1a,2aとなる部分である。図6(a5)には、将来、静止部1、可動部2となる部分も示す。
【0029】
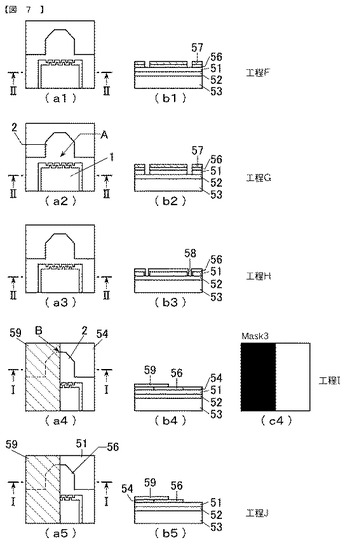
図7は、工程F〜Jにおける櫛歯型プローブ10の状態を示す図であり、図7(a1)〜図7(a5)はそれぞれ工程F〜Jにおける櫛歯型プローブ10の平面図、図7(b1)〜図7(b5)はそれぞれ工程F〜Jにおける櫛歯型プローブ10の断面図、図7(c4)は工程Iで用いられるマスクであり、図中、白い領域が遮蔽部分である。なお、図7(b1)〜図7(b3)はII−II線断面図、図7(b4),(b5)はI−I線断面図である。
【0030】
工程Fでは、レジスト層57をマスクとして酸化膜56を部分除去する。
工程Gでは、パターニングされた酸化膜56をマスクの代用としてICP−RIE(inductively coupled plasma - reactive ion etching)により上部Si層51を厚さ方向にエッチングする。ICP−RIEによるエッチング作用は、SiO2層52で停止するので、可動部2、櫛歯状凹凸部1a,2aの厚さを均一且つ高精度に作製することができる。エッチングされた部分には、SiO2層52の表面が露出する。
工程Hでは、残存するレジスト層57を除去した後に、上部Si層51が露出している側壁に表面保護のための酸化膜58を熱酸化法で厚さ0.5μm形成する。
【0031】
工程Iでは、図7(c4)に示すマスク3を用い、図7(a4)に示すように、左半分のみにレジスト層59を形成する。工程I以降の工程は、可動部2の先端部(矢印Bで示す部分)に探針3を作製する工程が主体である。
工程Jでは、レジスト層59をマスクとしてRIE(reactive ion etching)により、右側に残存しているSiN膜54を除去する。図7(a5)において右側に酸化膜56が露出している部分があるが、この部分はRIEではエッチングされずに残る。
【0032】
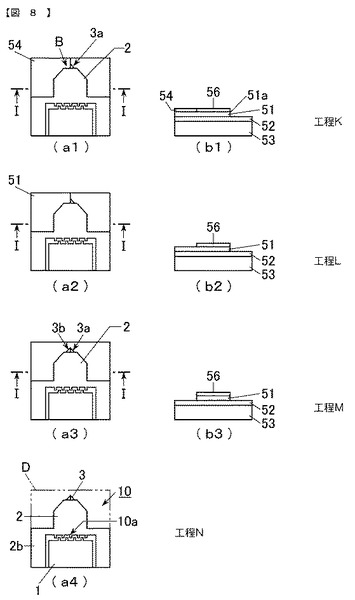
図8は、工程K〜Nにおける櫛歯型プローブ10の状態を示す図であり、図8(a1)〜図8(a4)はそれぞれ工程K〜Nにおける櫛歯型プローブ10の平面図、図8(b1)〜図8(b3)はそれぞれ工程K〜Mにおける櫛歯型プローブ10の断面図である。なお、図8(b1)〜図8(b3)はI−I線断面図である。
【0033】
工程Kでは、上部Si層51が露出している可動部2の右側の外周側面に対してKOH溶液を用いた異方性エッチングを行う。酸化膜56はKOHにエッチングされ難いので、上部Si層51のみが優先的にエッチングされ、可動部2の先端部に小さい斜面3aが形成される。この斜面3aはSiの(111)面である。なお、KOH溶液の代わりにTMAH(tetra methyl ammonium hydroxide)溶液を用いて異方性エッチングを行ってもよい。
工程Lでは、上部Si層51が露出している小さい斜面3aおよび可動部2の外周側面に対して表面保護のための熱酸化を施した後に、左側に残存しているSiN膜54を除去する。
【0034】
工程Mでは、可動部2の左側の外周側面に対して工程Kと同様に異方性エッチングを行う。その結果、可動部2の先端部に小さい斜面3bが形成され、斜面3a,3bから成る形状が探針3の形状の原型となる。
工程Nでは、酸化膜56を除去した後に、櫛歯型プローブ10の外形形状に対応するマスクを用いて裏面からのパターンエッチングにより、下部Si層53とSiO2層52の不要部分Dを除去する。このパターンエッチングでは、可動部2の裏側の下部Si層53とSiO2層52を除去し、静止部1と枠部2bの裏側(図3の支持部4に相当する領域)はマスクで遮蔽し、下部Si層53とSiO2層52の除去を行わない。このように、SOIウエハの裏面からパターンエッチングすることにより、静止部1、可動部2、探針3および支持部4の各部品が完成し、櫛歯型プローブ10が完成する。
【0035】
上記の製造工程では、1個の櫛歯型プローブ10についての一連の作製手順を説明したが、実際の製造工程は、SOIウエハ単位で行われる、いわゆるバッチ処理である。このバッチ処理では、フォトリソグラフィー法により、1枚のSOIウエハから多数の櫛歯型プローブ10を一括で作製することができ、大幅な製造コストの削減をもたらすものである。
【0036】
以上説明したように、本実施の形態による櫛歯型プローブ10は、次のような作用効果を奏する。
(1)櫛歯ドライブ10aは、成膜が難しい圧電体層のような機能性薄膜を有しないので、材料による製品ばらつきが小さい。
(2)櫛歯状凹凸部1a,2aの表面の電極膜以外はすべてSOIウエハから作製されるので、製造工程が単純であり、製品歩留まりが高い。
(3)櫛歯ドライブ10aを構成する櫛歯状凹凸部1aと2aは、相互に接触せず、静電力により間隔が規定されているので、振動による材料疲労はほとんど発生せず、耐久性が高い。
(4)アドミッタンス検出は、共振角周波数測定よりもバネ定数の変化Δkに対する変化率が大きいので、可動部2の変位を高精度で測定できる。特に、アドミッタンス検出は、共振角周波数が低くても高い感度が得られるので、マイクロマシン分野に適する検出方法である。
【0037】
また、本実施の形態による櫛歯型プローブ10を搭載したAFM装置100は、次のような作用効果を奏する。
(1)高精度な変位測定ができるので、試料S表面の正確な凹凸情報を得ることができる。
(2)カンチレバーの屈曲振動に対し往復振動する構造であるので、多数の櫛歯型プローブ10を並列配置する場合に高密度に配置することができる。
【0038】
本実施の形態の櫛歯型プローブ10、AFM装置100には、様々な変形が考えられる。例えば、上記の実施の形態では、アドミッタンス検出器20にLCRメータ21を具備してアドミッタンスを検出しているが、ブリッジ回路によりアドミッタンスを検出するように構成してもよい。
【0039】
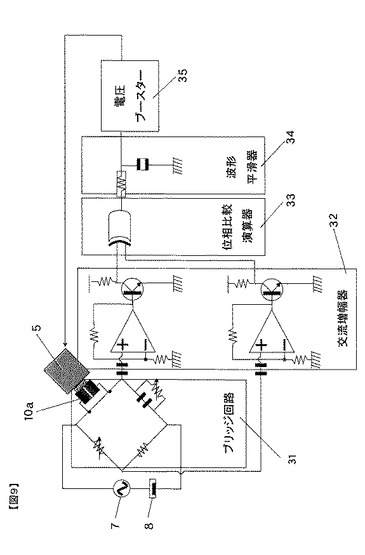
図9は、アドミッタンス検出器の変形例であり、アドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。櫛歯ドライブ10aに外力が作用し、アドミッタンスを検出するブリッジ回路31の平衡が崩れた場合、ブリッジの平衡を測定する端子の電圧が変化する。この電圧を交流増幅器32で増幅してからトランジスタでパルス化し、位相比較演算器33に入れる。このアドミッタンス検出では、アドミッタンスの位相のみに着目し、位相比較演算器33により位相の変化を測定する。位相が変化するとそれに比例したパルス電圧が発生するので、そのパルス電圧を波形平滑器34で平滑化し、電圧ブースター35で増幅し、ピエゾアクチュエータ5へフィードバックするための電圧信号とする。このように、アドミッタンスの位相変化Δθを検出することにより、バネ定数の変化Δkを求める。アドミッタンスの位相変化Δθは、バネ定数をk、バネ定数の変化をΔkとすると、機械抵抗rfが非常に小さい場合、Δθ≒Δk/2kの近似式で表される。
【0040】
本発明は、その特徴を損なわない限り、以上説明した実施の形態に何ら限定されない。本実施の形態では、発振角周波数ω1に定めてアドミッタンスの変化率ΔY/Yを求めたが、発振角周波数ω1付近ではアドミッタンス曲線y1の傾斜が大きいため、発振角周波数ω1付近であればアドミッタンスの変化率ΔY/Yも大きく検出感度は高いので、変位量測定は可能である。
【0041】
また、本実施の形態では、櫛歯ドライブ10aのアドミッタンス検出について説明したが、アドミッタンス検出に代えて櫛歯ドライブ10aのインピーダンスを検出するようにしてもよい。要するに、検出方法は、イミタンス(Iで表記する)の一つであるアドミッタンス、インピーダンスのいずれを用いてもよい。
【0042】
また、本実施の形態の櫛歯ドライブ10aでは、可動部2はZ方向の往復直線運動をするが、Z方向の運動をX方向の運動に変換する機構部品を可動部2に付加することもできる。これにより、例えばトレンチの側壁の凹凸情報を得ることができる。
【0043】
なお、特許請求の範囲と実施の形態による構成要素の対応関係については、櫛歯ドライブ10aが移動機構に、アドミッタンス検出器20が検出回路に、ピエゾアクチュエータ5が駆動電源にそれぞれ対応する。以上の説明はあくまで一例であり、発明を解釈する際、上記の実施形態の記載事項と特許請求の範囲の記載事項の対応関係に何ら限定も拘束もされない。
【図面の簡単な説明】
【0044】
【図1】本発明の実施の形態に係るAFM装置全体の概略を示す構成図である。
【図2】実施の形態に係る櫛歯型プローブの構造を模式的に示す正面図である。
【図3】実施の形態に係る櫛歯型プローブの拡大斜視図である。
【図4】実施の形態に係る櫛歯型プローブのアドミッタンスの角周波数依存性を表すグラフであり、図4(a)はグラフ全体、図4(b)は、図4(a)の円内を拡大して示す図である。
【図5】実施の形態に係る櫛歯型プローブのアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。
【図6】工程A〜Eにおける櫛歯型プローブ10の状態を示す図である。
【図7】工程F〜Jにおける櫛歯型プローブ10の状態を示す図である。
【図8】工程K〜Nにおける櫛歯型プローブ10の状態を示す図である。
【図9】アドミッタンス検出器の変形例であり、櫛歯型プローブのアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。
【図10】電気・機械結合系の等価回路の概略を示す図である。
【符号の説明】
【0045】
1:静止部 1a:櫛歯状凹凸部
2:可動部 2a:櫛歯状凹凸部
3:探針 4:支持部
5:ピエゾアクチュエータ 6:ステージ
7:交流電源 8:直流電源
10:櫛歯型プローブ 10a:櫛歯ドライブ
11:制御演算部 20:アドミッタンス検出器
51:上部Si層 52:SiO2層
53:下部Si層 100:AFM装置
S:試料
【技術分野】
【0001】
本発明は、櫛歯型プローブ、これを備える原子間力顕微鏡装置および変位測定方法に関する。
【背景技術】
【0002】
カンチレバーに設けられた探針と試料との微視的距離を測定する方法として、カンチレバー表面に圧電体層と電極膜との多層構造をもつアクチュエータを形成し、そのアクチュエータでカンチレバーをその固有振動数で屈曲振動させ、圧電体素子のアドミッタンス変化を検出する方法が知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平6−194157号公報(第2頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
圧電体の成分比や圧電体層の膜厚はカンチレバーの振動状態に影響を及ぼすが、圧電体層をカンチレバー表面に形成する際に、成分比や膜厚を正確に制御するのは難しく、材料による製品のばらつきが発生し易いという問題がある。
【課題を解決するための手段】
【0005】
(1)請求項1に係る櫛歯型プローブは、試料表面の作用に基づく物理量を検出する櫛歯型プローブであって、第1の櫛歯状凹凸部を有する静止部と、第1の櫛歯状凹凸部と噛合する第2の櫛歯状凹凸部を有し、外力により変位する可動部とを備え、可動部の変位を、交流バイアスが発生する静電力により振動する第1および第2の櫛歯状凹凸部から成る移動機構のイミタンスに基づいて算出することを特徴とする。
(2)請求項2の発明は、請求項1に記載の櫛歯型プローブにおいて、静止部および可動部は、フォトリソグラフィー法によりSOIウエハから一体で作製されることを特徴とする。
(3)請求項3の発明は、請求項1または2に記載の櫛歯型プローブと、可動部に設けられる探針と、可動部を励振する交流電源と、可動部が静電力により振動しているとき、イミタンスを検出する検出回路と、検出回路で検出されたイミタンスを一定とするように静止部を駆動する駆動電源とを備えることを特徴とする。
(4)請求項4に係る変位測定方法は、請求項1または2に記載の櫛歯型プローブの移動機構に振動を与え、その共振角周波数ω0を測定する工程と、共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で振動させて可動部に加わる外力が零のときの基準イミタンス値I0を測定する工程と、発振角周波数ω1に定めて振動させ、可動部に外力が加わったときのイミタンス値I1を測定する工程と、イミタンス値の変化量(I1−I0)から、可動部の外力による変位量を算出することを特徴とする。
【発明の効果】
【0006】
本発明の櫛歯型プローブによれば、櫛歯状凹凸部から成る移動機構に働く静電力により可動部を励振する構造であり、圧電体層のような機能性薄膜を有しないので、製造工程がシンプルであり、高い製品歩留まりを実現できる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態による櫛歯型プローブおよび原子間力顕微鏡装置(以下、AFM装置と呼ぶ)について図1〜8を参照しながら説明する。
図1は、本発明の実施の形態によるAFM装置全体の概略を示す構成図である。図2は、図1のAFM装置に用いられる櫛歯型プローブの構造を模式的に示す正面図である。図3は、図2に示す櫛歯型プローブの拡大斜視図である。図1〜図3では、XYZ直交座標で方向を表す。
【0008】
図1に示されるように、AFM装置100は、櫛歯ドライブ10aを有する櫛歯型プローブ10と、櫛歯型プローブ10をZ方向に駆動するピエゾアクチュエータ5と、試料Sを載置してXYZ方向に移動するステージ6とを備えている。櫛歯型プローブ10は、支持部4を介してピエゾアクチュエータ5に固定され、ピエゾアクチュエータ5は、不図示のフレームに固設されている。AFM装置100は、さらに、交流電源7と、直流電源8と、アドミッタンス検出器20と、制御演算部11と、ステージ走査用電源12と、ディスプレイ13とを備えている。
【0009】
交流電源7と直流電源8とは直列に接続され、交流電源7が櫛歯ドライブ10aに電気的に接続されている。アドミッタンス検出器20は、交流電源7と櫛歯ドライブ10aを含む電気回路に接続されるとともに、制御演算部11にも接続されている。制御演算部11は、アドミッタンス検出器20に接続されるとともに、ピエゾアクチュエータ5、ステージ走査用電源12およびディスプレイ13にそれぞれ接続されている。
【0010】
図2および図3に示されるように、櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。静止部1は、支持部4に固定されており、櫛歯状凹凸部1aを有する。可動部2は、枠部2b、ビーム2cを介して支持部4に連結されており、櫛歯状凹凸部2aを有する。櫛歯状凹凸部1a,2aの表面(Y−Z面)には、それぞれ電極膜が成膜されている。櫛歯型プローブ10は、櫛歯状凹凸部1aと2aとが非接触で噛合し、静電力により可動部2がZ方向に移動可能に構成されており、櫛歯状凹凸部1aと2aとから成る移動機構が櫛歯ドライブ10aである。枠部2bは、支持部4に固定されており、細いビーム2cを介して可動部2を支持している。したがって、可動部2が動くときは、ビーム2cがたわみ変形を生じる。
【0011】
図3を参照して、櫛歯型プローブ10の各構成部品について、材料となるウエハと対比させて説明する。櫛歯型プローブ10は、図6〜8を用いて後述する製造工程により、SOI(Silicon on Insulator)ウエハから一体で作製される。SOIウエハは、2枚のSi単結晶板の一方にSiO2層を形成し、そのSiO2層を介して貼り合わせた3層構造であり、上部Si層、SiO2層および下部Si層を有する。櫛歯状凹凸部1aを含む静止部1、櫛歯状凹凸部2aを含む可動部2および探針3は上部Si層から形成され、支持部4は、SiO2層および下部Si層から形成されている。このように、櫛歯型プローブ10は、櫛歯状凹凸部1a,2aの表面の電極膜以外はすべてSOIウエハから作製される。
【0012】
再び図1を参照すると、櫛歯ドライブ10aには、直流電源8による直流電圧に交流電源7による交流電圧が重畳されたバイアス電圧が印加される。具体的には、櫛歯状凹凸部1aの電極膜と櫛歯状凹凸部2aの電極膜との間に電圧が印加される。直流電圧により櫛歯状凹凸部1aと2aとの距離が規定され、この距離を中立として、交流電圧の振幅と周波数に応じて櫛歯ドライブ10aが動作し、可動部2がZ方向に振動する。櫛歯ドライブ10aの固有振動数で可動部2を振動させると、すなわち共振させると最も効率良く大きな振幅を得ることができる。
【0013】
アドミッタンス検出器20は、交流電圧が加えられている櫛歯ドライブ10aのアドミッタンスを検出し、検出データを制御演算部11へ送出する。制御演算部11は、アドミッタンスの検出値から外力の大きさあるいは外力を及ぼす物体との距離を演算して、演算結果をディスプレイ13に表示する。また、制御演算部11は、演算結果に基づいてピエゾアクチュエータ5を駆動制御したり、ステージ走査用電源12を介してステージ6を移動させる。
【0014】
上記のように構成されたAFM装置100では、探針3が設けられた可動部2を振動させながら探針3を試料Sにナノメーターオーダーで近接させ、探針3と試料Sとの間に働く原子間力を検出するタッピングモードが採用されている。この原子間力は、探針3と試料Sとの距離に依存する物理量であり、原子間力を櫛歯ドライブ10aのアドミッタンスとして検出することができる。本発明のAFM装置100は、アドミッタンス一定、つまり距離一定とするようにピエゾアクチュエータ5をZ方向に駆動しながら探針3と試料SとをX−Y面に沿って相対的に二次元走査することにより、試料S表面の凹凸情報を得るものである。したがって、本発明の櫛歯型プローブ10は、原子間力(外力に相当)を櫛歯ドライブ10aのアドミッタンスとして検出し、その検出値から探針3と試料Sとの距離を求めることができる。
【0015】
一般に、電気・機械結合系において電気的エネルギーおよび機械的エネルギーの保存則が成立する。図10は、電気・機械結合系の等価回路の概略を示す図であり、公知の電気・機械結合系の解析法を用いて平行平板型アクチュエータのモデル化を行ったものである。これは、外力f、励起電圧eが小さく、変位量、電荷量の変動も小さい条件下で成立する。Mは電気系と機械系の結合係数である。結合係数Mは、ガウスの定理より、M=E0C0/ε0Sと書くことができる。但し、E0は直流バイアス電圧、C0は初期状態のコンデンサ容量、ε0は真空の誘電率、Sは電極面積である。図10に示す電気系の式と機械系の式においては、R、i、v、C0、CSは、それぞれ平行平板型アクチュエータの抵抗、電流、振動速度、初期状態のコンデンサ容量、浮遊容量であり、m、k、rfは、それぞれ平行平板型アクチュエータの等価質量、バネ定数、機械系の摩擦抵抗(機械抵抗)である。
【0016】
上記の平行平板型アクチュエータモデルを基本とすると、櫛歯型のアクチュエータの線形近似基本方程式は、式(1),(2)で表される。
i1=jω(C0+CS)e1+(E0C0/X0)ν1 (1)
f1=jωmν1+rfν1+kν1/jω+E0C0e1/X0 (2)
但し、i1は交流電流値、e1は入力交流電圧の振幅、ν1は可動部2の振動速度であり、f1、m、k、rfは、それぞれ櫛歯ドライブ10aに作用する外力、等価質量、バネ定数、機械系の摩擦抵抗(機械抵抗)である。また、E0は櫛歯ドライブ10aに加わる直流バイアス電圧、C0は初期状態の櫛歯状凹凸部のコンデンサ容量、CSは電極パッド等の浮遊容量、X0は初期状態の櫛歯間距離である。式(1),(2)より、外力が零の場合、櫛歯ドライブ10aのアドミッタンスの絶対値|Y|と角周波数ωの関係は最終的に式(3)のように表すことができる。ここで、A=E0C0/X0と置く。なお、アドミッタンスの絶対値|Y|には、式(3)のようにドットが付いている場合もあるが、|Y|と同じものであり、以下、同様とする。
【数1】
【0017】
図4は、この実施の形態による櫛歯型プローブのアドミッタンスの角周波数依存性を表すグラフであり、図4(a)はグラフ全体、図4(b)は、図4(a)の円内を拡大して示す図である。式(3)は、図4(a)のアドミッタンス曲線y1で表される。
アドミッタンス曲線y1は、電気・機械結合系の特性曲線であるが、アドミッタンス曲線y2は、機械系がない電気系のみの特性曲線であり、|Y|=ω(C0+CS)で表される。すなわち、アドミッタンス曲線y2は、式(3)において式(4)が成り立つときの特性曲線(実際には、1次関数なので直線)である。
A2−2ω(C0+CS)(ωm−k/ω)=0 (4)
式(4)を満たす角周波数ωを発振角周波数ω1と呼ぶと、発振角周波数ω1は、アドミッタンス曲線y1とy2の交点における角周波数である。発振角周波数ω1は、共振角周波数ω0に近い値であり、発振角周波数ω1で櫛歯ドライブ10aを駆動すると、上述したように、機械系の特性がキャンセルされ、電気系のみのアドミッタンス計測が可能となる。
【0018】
なお、共振角周波数ω0は、アドミッタンス曲線y1のピーク位置より僅かに高いところに位置しており、アドミッタンス曲線y1のピーク角周波数をωp、凹カーブを示す部分のボトムの角周波数をωbとすれば、共振角周波数ω0と発振角周波数ω1との関係は、式(5)で表すことができる。発振角周波数ω1、ピーク角周波数ωp、ボトム角周波数ωbとの間には、2/ω1=1/ωp+1/ωbという関係も導かれる。
【数2】
【0019】
図4(b)を参照すると、発振角周波数ω1で櫛歯ドライブ10aを駆動しているときに、櫛歯ドライブ10aに外力が作用すると、アドミッタンス曲線y1(外力なし)からアドミッタンス曲線y3(外力の作用あり)へと変化する。その結果、図示されるように、発振角周波数ω1におけるアドミッタンスはΔYだけ変化する。可動部2の変位量は、後述するように、アドミッタンス変化の検出値から算出される。従来は、共振角周波数ω0で角周波数のシフト量Δωを検出していたが、アドミッタンス変化ΔYの検出により、さらに高感度の測定が可能となる。
【0020】
なお、櫛歯ドライブ10aに作用する外力の変化は、櫛歯ドライブ10aのバネ定数kが僅かに変化してバネ定数(k+Δk)となったときのアドミッタンスの変化ΔYとして求められる。すなわち、式(3)から導かれる近似式により、発振角周波数ω1でのアドミッタンスの絶対値|Y|とアドミッタンスの変化ΔYは、それぞれ式(6)、式(7)で表される。
|Y|=ω1(C0+CS) (6)
ΔY=A2Δk/ω1rf2 (7)
したがって、アドミッタンスの変化ΔYを検出することにより、バネ定数の変化Δkを求め、結果的に櫛歯ドライブ10aに作用する外力の大きさあるいは可動部2の変位量を求めることができる。
【0021】
本実施の形態の櫛歯型プローブ10では、櫛歯ドライブ10aのアドミッタンスから直接に変位量x1を求めることができる。上述した櫛歯型のアクチュエータの線形近似基本方程式である式(1),(2)において、正弦波駆動の場合は、ν1=jωx1と書けるので、式(1)を変形すると式(8)となる。
i1/e1=jω[C0{1+(x1/X0)(E0/e1)}+CS] (8)
【0022】
式(8)よりアドミッタンスの絶対値|Y|は、式(9)のように書き表せる。
|Y1|=|i1/e1|=ω[C0{1+(x1/X0)(E0/e1)}+CS] (9)
式(9)から変位量x1は式(10)として導かれる。
x1=[{(|Y1|−ωCS)/ωC0−1}](e1/E0)X0 (10)
前述したように、A=E0C0/X0であるから、式(10)を変形して式(11)を得る。
x1=[{(|Y1|−ωCS)/ωC0−1}](C0e1/A) (11)
Y0=ω(C0+CS)とおけば、式(11)を変形して式(12)を得る。
x1={(|Y1|−|Y0|)/ωC0}(C0e1/A)=ΔY/ω(e1/A)
(12)
複数の櫛歯を有するアクチュエータでは、Aは、A=nbE0/dと書ける。ここで、nは櫛歯型プローブ10の櫛歯の数、bは櫛歯の厚さ、dは対向する櫛歯間のギャップである。Y1、Y0、C0、E0、e1は測定から求まり、bはSOIウエハの上部Si層の厚さに等しく、dはSEM観察により実測できるので、変位量x1が算出できる。なお、櫛歯間のギャップdには設計値があるが、その設計値と製造プロセス後に実測した値とが異なる場合は、後者を用いる方がAの値を正確に得ることができる。
【0023】
以上をまとめると、可動部2の変位量算出手順は次のとおりである。
(1)櫛歯型プローブ10の櫛歯ドライブ10aに振動を与え、その共振角周波数ω0を測定する。
(2)共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で櫛歯ドライブ10aを振動させて可動部2に加わる外力が零のときの基準アドミッタンス値|Y0|を検出する。
(3)角周波数ωを発振角周波数ω1に定めて櫛歯ドライブ10aに振動を与え、可動部2に外力が加わったときのアドミッタンス値|Y1|を検出する。
(4)アドミッタンスの変化ΔY(=|Y1|−|Y0|)から、可動部2の外力による変位量を算出する。
【0024】
アドミッタンス検出器を用いたアドミッタンス|Y|の検出について具体的に説明する。
図5は、実施の形態による櫛歯型プローブ10のアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。アドミッタンスを検出するLCRメータ21は、ロックインアンプ24と、電流測定用回路25と、電圧測定用回路26とを有する。
【0025】
櫛歯ドライブ10aには交流電圧が加えられており、電流測定用回路25により櫛歯ドライブ10aの電流の絶対値と位相が測定され、電圧測定用回路26により櫛歯ドライブ10aの電圧の絶対値と位相が測定される。これら2つの物理量の絶対値と位相からアドミッタンスの絶対値|Y|と位相をロックインアンプ24で演算する。LCRメータ21からアドミッタンスの絶対値|Y|に比例する電圧VYを出力し、比較器22で電圧VYを基準電圧と比較する。ここで、基準電圧とは、図4(a)に示す発振角周波数ω1におけるアドミッタンスに対応する電圧である。電圧VYと基準電圧との偏差分は、電圧ブースター23で増幅されて電圧信号ΔVとなり、ピエゾアクチュエータ5へフィードバックされる。そのピエゾアクチュエータ5の駆動量が可動部2の変位量に対応する。
【0026】
次に、本実施の形態の櫛歯型プローブ10の製造工程について、図6〜8を参照しながら詳しく説明する。
図6は、工程A〜Eにおける櫛歯型プローブ10の状態を示す図であり、図6(a1)〜図6(a5)はそれぞれ工程A〜Eにおける櫛歯型プローブ10の平面図、図6(b1)〜図6(b5)はそれぞれ工程A〜Eにおける櫛歯型プローブ10の断面図、図6(c2)、図6(c5)はそれぞれ工程B、Eで用いられるマスクであり、図中、白い領域が遮蔽部分である。なお、図6(b1)〜図6(b4)はI−I線断面図、図6(b5)はII−II線断面図である。
【0027】
工程Aでは、上述した3層構造のSOIウエハの上部Si層51の表面に、低圧CVDにより厚さ50nmの窒化珪素(SiN)膜54を形成する。なお、上部Si層51の表面を単結晶Siの主面(001)とし、図中、上下方向を<010>とする。
工程Bでは、図6(c2)に示すマスク1を用い、SiN膜54の表面にフォトリソグラフィーでレジスト層55を形成する。
【0028】
工程Cでは、レジスト層55をマスクとしてSiN膜54を部分除去する。
工程Dでは、上部Si層51が露出している領域に表面保護のための酸化膜56を厚さ0.5μm形成する。酸化方法は、高温の酸化雰囲気で加熱する熱酸化である。
工程Eでは、図6(c5)に示すマスク2を用い、酸化膜56の表面にフォトリソグラフィーでレジスト層57を形成する。図6(a5)の矢印Aで示す凹凸パターン部分は、将来、櫛歯状凹凸部1a,2aとなる部分である。図6(a5)には、将来、静止部1、可動部2となる部分も示す。
【0029】
図7は、工程F〜Jにおける櫛歯型プローブ10の状態を示す図であり、図7(a1)〜図7(a5)はそれぞれ工程F〜Jにおける櫛歯型プローブ10の平面図、図7(b1)〜図7(b5)はそれぞれ工程F〜Jにおける櫛歯型プローブ10の断面図、図7(c4)は工程Iで用いられるマスクであり、図中、白い領域が遮蔽部分である。なお、図7(b1)〜図7(b3)はII−II線断面図、図7(b4),(b5)はI−I線断面図である。
【0030】
工程Fでは、レジスト層57をマスクとして酸化膜56を部分除去する。
工程Gでは、パターニングされた酸化膜56をマスクの代用としてICP−RIE(inductively coupled plasma - reactive ion etching)により上部Si層51を厚さ方向にエッチングする。ICP−RIEによるエッチング作用は、SiO2層52で停止するので、可動部2、櫛歯状凹凸部1a,2aの厚さを均一且つ高精度に作製することができる。エッチングされた部分には、SiO2層52の表面が露出する。
工程Hでは、残存するレジスト層57を除去した後に、上部Si層51が露出している側壁に表面保護のための酸化膜58を熱酸化法で厚さ0.5μm形成する。
【0031】
工程Iでは、図7(c4)に示すマスク3を用い、図7(a4)に示すように、左半分のみにレジスト層59を形成する。工程I以降の工程は、可動部2の先端部(矢印Bで示す部分)に探針3を作製する工程が主体である。
工程Jでは、レジスト層59をマスクとしてRIE(reactive ion etching)により、右側に残存しているSiN膜54を除去する。図7(a5)において右側に酸化膜56が露出している部分があるが、この部分はRIEではエッチングされずに残る。
【0032】
図8は、工程K〜Nにおける櫛歯型プローブ10の状態を示す図であり、図8(a1)〜図8(a4)はそれぞれ工程K〜Nにおける櫛歯型プローブ10の平面図、図8(b1)〜図8(b3)はそれぞれ工程K〜Mにおける櫛歯型プローブ10の断面図である。なお、図8(b1)〜図8(b3)はI−I線断面図である。
【0033】
工程Kでは、上部Si層51が露出している可動部2の右側の外周側面に対してKOH溶液を用いた異方性エッチングを行う。酸化膜56はKOHにエッチングされ難いので、上部Si層51のみが優先的にエッチングされ、可動部2の先端部に小さい斜面3aが形成される。この斜面3aはSiの(111)面である。なお、KOH溶液の代わりにTMAH(tetra methyl ammonium hydroxide)溶液を用いて異方性エッチングを行ってもよい。
工程Lでは、上部Si層51が露出している小さい斜面3aおよび可動部2の外周側面に対して表面保護のための熱酸化を施した後に、左側に残存しているSiN膜54を除去する。
【0034】
工程Mでは、可動部2の左側の外周側面に対して工程Kと同様に異方性エッチングを行う。その結果、可動部2の先端部に小さい斜面3bが形成され、斜面3a,3bから成る形状が探針3の形状の原型となる。
工程Nでは、酸化膜56を除去した後に、櫛歯型プローブ10の外形形状に対応するマスクを用いて裏面からのパターンエッチングにより、下部Si層53とSiO2層52の不要部分Dを除去する。このパターンエッチングでは、可動部2の裏側の下部Si層53とSiO2層52を除去し、静止部1と枠部2bの裏側(図3の支持部4に相当する領域)はマスクで遮蔽し、下部Si層53とSiO2層52の除去を行わない。このように、SOIウエハの裏面からパターンエッチングすることにより、静止部1、可動部2、探針3および支持部4の各部品が完成し、櫛歯型プローブ10が完成する。
【0035】
上記の製造工程では、1個の櫛歯型プローブ10についての一連の作製手順を説明したが、実際の製造工程は、SOIウエハ単位で行われる、いわゆるバッチ処理である。このバッチ処理では、フォトリソグラフィー法により、1枚のSOIウエハから多数の櫛歯型プローブ10を一括で作製することができ、大幅な製造コストの削減をもたらすものである。
【0036】
以上説明したように、本実施の形態による櫛歯型プローブ10は、次のような作用効果を奏する。
(1)櫛歯ドライブ10aは、成膜が難しい圧電体層のような機能性薄膜を有しないので、材料による製品ばらつきが小さい。
(2)櫛歯状凹凸部1a,2aの表面の電極膜以外はすべてSOIウエハから作製されるので、製造工程が単純であり、製品歩留まりが高い。
(3)櫛歯ドライブ10aを構成する櫛歯状凹凸部1aと2aは、相互に接触せず、静電力により間隔が規定されているので、振動による材料疲労はほとんど発生せず、耐久性が高い。
(4)アドミッタンス検出は、共振角周波数測定よりもバネ定数の変化Δkに対する変化率が大きいので、可動部2の変位を高精度で測定できる。特に、アドミッタンス検出は、共振角周波数が低くても高い感度が得られるので、マイクロマシン分野に適する検出方法である。
【0037】
また、本実施の形態による櫛歯型プローブ10を搭載したAFM装置100は、次のような作用効果を奏する。
(1)高精度な変位測定ができるので、試料S表面の正確な凹凸情報を得ることができる。
(2)カンチレバーの屈曲振動に対し往復振動する構造であるので、多数の櫛歯型プローブ10を並列配置する場合に高密度に配置することができる。
【0038】
本実施の形態の櫛歯型プローブ10、AFM装置100には、様々な変形が考えられる。例えば、上記の実施の形態では、アドミッタンス検出器20にLCRメータ21を具備してアドミッタンスを検出しているが、ブリッジ回路によりアドミッタンスを検出するように構成してもよい。
【0039】
図9は、アドミッタンス検出器の変形例であり、アドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。櫛歯ドライブ10aに外力が作用し、アドミッタンスを検出するブリッジ回路31の平衡が崩れた場合、ブリッジの平衡を測定する端子の電圧が変化する。この電圧を交流増幅器32で増幅してからトランジスタでパルス化し、位相比較演算器33に入れる。このアドミッタンス検出では、アドミッタンスの位相のみに着目し、位相比較演算器33により位相の変化を測定する。位相が変化するとそれに比例したパルス電圧が発生するので、そのパルス電圧を波形平滑器34で平滑化し、電圧ブースター35で増幅し、ピエゾアクチュエータ5へフィードバックするための電圧信号とする。このように、アドミッタンスの位相変化Δθを検出することにより、バネ定数の変化Δkを求める。アドミッタンスの位相変化Δθは、バネ定数をk、バネ定数の変化をΔkとすると、機械抵抗rfが非常に小さい場合、Δθ≒Δk/2kの近似式で表される。
【0040】
本発明は、その特徴を損なわない限り、以上説明した実施の形態に何ら限定されない。本実施の形態では、発振角周波数ω1に定めてアドミッタンスの変化率ΔY/Yを求めたが、発振角周波数ω1付近ではアドミッタンス曲線y1の傾斜が大きいため、発振角周波数ω1付近であればアドミッタンスの変化率ΔY/Yも大きく検出感度は高いので、変位量測定は可能である。
【0041】
また、本実施の形態では、櫛歯ドライブ10aのアドミッタンス検出について説明したが、アドミッタンス検出に代えて櫛歯ドライブ10aのインピーダンスを検出するようにしてもよい。要するに、検出方法は、イミタンス(Iで表記する)の一つであるアドミッタンス、インピーダンスのいずれを用いてもよい。
【0042】
また、本実施の形態の櫛歯ドライブ10aでは、可動部2はZ方向の往復直線運動をするが、Z方向の運動をX方向の運動に変換する機構部品を可動部2に付加することもできる。これにより、例えばトレンチの側壁の凹凸情報を得ることができる。
【0043】
なお、特許請求の範囲と実施の形態による構成要素の対応関係については、櫛歯ドライブ10aが移動機構に、アドミッタンス検出器20が検出回路に、ピエゾアクチュエータ5が駆動電源にそれぞれ対応する。以上の説明はあくまで一例であり、発明を解釈する際、上記の実施形態の記載事項と特許請求の範囲の記載事項の対応関係に何ら限定も拘束もされない。
【図面の簡単な説明】
【0044】
【図1】本発明の実施の形態に係るAFM装置全体の概略を示す構成図である。
【図2】実施の形態に係る櫛歯型プローブの構造を模式的に示す正面図である。
【図3】実施の形態に係る櫛歯型プローブの拡大斜視図である。
【図4】実施の形態に係る櫛歯型プローブのアドミッタンスの角周波数依存性を表すグラフであり、図4(a)はグラフ全体、図4(b)は、図4(a)の円内を拡大して示す図である。
【図5】実施の形態に係る櫛歯型プローブのアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。
【図6】工程A〜Eにおける櫛歯型プローブ10の状態を示す図である。
【図7】工程F〜Jにおける櫛歯型プローブ10の状態を示す図である。
【図8】工程K〜Nにおける櫛歯型プローブ10の状態を示す図である。
【図9】アドミッタンス検出器の変形例であり、櫛歯型プローブのアドミッタンス検出から信号処理までの装置構成の概略を示すブロック図である。
【図10】電気・機械結合系の等価回路の概略を示す図である。
【符号の説明】
【0045】
1:静止部 1a:櫛歯状凹凸部
2:可動部 2a:櫛歯状凹凸部
3:探針 4:支持部
5:ピエゾアクチュエータ 6:ステージ
7:交流電源 8:直流電源
10:櫛歯型プローブ 10a:櫛歯ドライブ
11:制御演算部 20:アドミッタンス検出器
51:上部Si層 52:SiO2層
53:下部Si層 100:AFM装置
S:試料
【特許請求の範囲】
【請求項1】
試料表面の作用に基づく物理量を検出する櫛歯型プローブであって、
第1の櫛歯状凹凸部を有する静止部と、
前記第1の櫛歯状凹凸部と噛合する第2の櫛歯状凹凸部を有し、外力により変位する可動部とを備え、
前記可動部の変位を、交流電圧が発生する静電力により振動する前記第1および第2の櫛歯状凹凸部から成る移動機構のイミタンスに基づいて算出することを特徴とする櫛歯型プローブ。
【請求項2】
請求項1に記載の櫛歯型プローブにおいて、
前記静止部および前記可動部は、フォトリソグラフィー法によりSOIウエハから一体で作製されることを特徴とする櫛歯型プローブ。
【請求項3】
請求項1または2に記載の櫛歯型プローブと、
前記可動部に設けられる探針と、
前記可動部を励振する交流電源と、
前記可動部が前記静電力により振動しているとき、前記イミタンスを検出する検出回路と、
前記検出回路で検出されたイミタンスを一定とするように前記静止部を駆動する駆動電源とを備えることを特徴とする原子間力顕微鏡装置。
【請求項4】
請求項1または2に記載の櫛歯型プローブの前記移動機構に振動を与え、その共振角周波数ω0を測定する工程と、
前記共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で振動させて前記可動部に加わる外力が零のときの基準イミタンス値I0を測定する工程と、
前記発振角周波数ω1に定めて振動させ、前記可動部に外力が加わったときのイミタンス値I1を測定する工程と、
前記イミタンス値の変化量(I1−I0)から、前記可動部の前記外力による変位量を算出することを特徴とする変位測定方法。
【請求項1】
試料表面の作用に基づく物理量を検出する櫛歯型プローブであって、
第1の櫛歯状凹凸部を有する静止部と、
前記第1の櫛歯状凹凸部と噛合する第2の櫛歯状凹凸部を有し、外力により変位する可動部とを備え、
前記可動部の変位を、交流電圧が発生する静電力により振動する前記第1および第2の櫛歯状凹凸部から成る移動機構のイミタンスに基づいて算出することを特徴とする櫛歯型プローブ。
【請求項2】
請求項1に記載の櫛歯型プローブにおいて、
前記静止部および前記可動部は、フォトリソグラフィー法によりSOIウエハから一体で作製されることを特徴とする櫛歯型プローブ。
【請求項3】
請求項1または2に記載の櫛歯型プローブと、
前記可動部に設けられる探針と、
前記可動部を励振する交流電源と、
前記可動部が前記静電力により振動しているとき、前記イミタンスを検出する検出回路と、
前記検出回路で検出されたイミタンスを一定とするように前記静止部を駆動する駆動電源とを備えることを特徴とする原子間力顕微鏡装置。
【請求項4】
請求項1または2に記載の櫛歯型プローブの前記移動機構に振動を与え、その共振角周波数ω0を測定する工程と、
前記共振角周波数ω0に近い機械系の特性がキャンセルされる発振角周波数ω1で振動させて前記可動部に加わる外力が零のときの基準イミタンス値I0を測定する工程と、
前記発振角周波数ω1に定めて振動させ、前記可動部に外力が加わったときのイミタンス値I1を測定する工程と、
前記イミタンス値の変化量(I1−I0)から、前記可動部の前記外力による変位量を算出することを特徴とする変位測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−93231(P2007−93231A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−279220(P2005−279220)
【出願日】平成17年9月27日(2005.9.27)
【出願人】(390022471)アオイ電子株式会社 (85)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月27日(2005.9.27)
【出願人】(390022471)アオイ電子株式会社 (85)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
[ Back to top ]