
欠陥分類方法及びその装置
【課題】外観検査の欠陥分類において、重要欠陥のピュリティまたはアキュラシーまたはその両方が目標値以上になるように調整するなどのニーズがあるが、教示型の欠陥分類は平均的に分類正解率が高くなるよう条件設定されるため、そのようなニーズに応えられないという問題があった。
【解決手段】特徴量抽出部、欠陥分類部、分類条件設定部を含み、分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有し、優先順位の高い分類の正解率が高くなるよう条件設定を行う。
【解決手段】特徴量抽出部、欠陥分類部、分類条件設定部を含み、分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有し、優先順位の高い分類の正解率が高くなるよう条件設定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェハ、ハードディスク基板などの薄膜デバイス、PDP、TFTなどの薄型ディスプレイ、ホトマスク、フィルムなどを対象とした、ランプ光もしくはレーザ光、或いは電子線などを用いて得られた対象物の画像に基づいて微細なパターン欠陥や異物等を検出し、欠陥分類を行う欠陥分類方法および装置に関する。
【背景技術】
【0002】
半導体ウェハ、液晶ディスプレイ、ハードディスク磁気ヘッドなどの薄膜デバイスは多数の加工工程を経て製造される。このような薄膜デバイスの製造においては、歩留まり向上及び安定化を目的として、いくつかの一連の工程毎に外観検査が実施される。外観検査では対象のデバイス表面を、ランプ光、レーザ光または電子線などを用いて照射し、反射光、散乱光または二次電子などを検出して得られた画像を元に、パターン欠陥あるいは異物などの欠陥を検出する。パターン付半導体ウェハの場合、本来同一になるように形成されたパターンの2つの対応領域の画像を検出し、位置合せを行った上で差を算出し、別途定めたしきい値と比較して差が大きくなる部分を欠陥あるいは異物として検出する。同時に、欠陥部の画像から輝度、サイズなどの欠陥の特徴量を算出し、それらに基づいて欠陥を分類する。
【0003】
例えば、特許文献1には、落射照明と斜方照明による散乱光強度の違いに応じて凸欠陥である異物と凹欠陥であるスクラッチを分類する検査装置が開示されている。このような欠陥分類機能を有する検査装置の欠陥分類条件を決める際にはレビューによって分類すべきクラスを教示し、特徴量とクラスの関係を導く必要がある。上記の例では分類すべきクラスとは異物あるいはスクラッチのいずれかであり、落射照明時の散乱光強度、斜方照明時の散乱光強度を特徴量とし、2次元の散布図をもとに弁別線を手動で設定している。
【0004】
その他、分類手法には教示型とルールベース型がある。教示型は、正解クラスと対応付けられた特徴量データの教示によって、自動的に分類器を構成するものである。特徴量空間上での距離がもっとも近い教示済み欠陥のクラスへ分類する方法や、教示データに基づいて各欠陥クラスの特徴量分布を推定しておき、分類しようとする欠陥の特徴量の生起確率が最も高いクラスへ分類する方法などが教示型の分類である。ルールベース型とは、if-then-elseで記述されるルールに従って分類する方法である。ルールは特徴量に対するしきい値で表現されることが多い。特許文献1記載の分類方法もこのルールベース型の一種である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−257533号公報
【非特許文献】
【0006】
【非特許文献1】Pi-Fuei Hsieh, Deng-Shiang Wang, Chia-Wei Hsu : "A Linear Feature Extraction for Multiclass Classification Problems Based on Class Mean and Covariance Discriminant Information", IEEE Transactions on Pattern Analysis and Machine Intelligens, Vol.28, No.2, pp.223-235 (2006/2)
【非特許文献2】Bor-Chen Kuo, David A Landgrebe : "Nonparametric Weighted Feature Extraction for Classification", IEEE Transactions on Geoscience and Remote Sensing, Vol.42, No.5, pp.1096-1105 (2004/5)
【発明の概要】
【発明が解決しようとする課題】
【0007】
教示型の欠陥分類はデータを入力すると自動的に分類条件が設定されるが、ブラックボックスであるため、ユーザの意図を反映させることができず、条件の解釈もできない。ユーザの意図とは、例えば重要欠陥のピュリティまたはアキュラシーまたはその両方が目標値以上になるように調整することである。
【0008】
一方、ルールベース型の欠陥分類は、理論と経験に基づいて条件設定が可能であり、使用者にとって理解しやすいという利点があるが、特徴量の種類や、欠陥クラスの種類が多くなってくると、手動での条件設定は困難になる。
【0009】
本発明の目的は、上記ユーザの意図を反映可能な分類条件設定機能を有する欠陥分類方法及び装置を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含む。欠陥分類部は、特徴変換を施した後、少なくとも一つの教示型分類器を用いて欠陥分類を行う構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、優先順位の高い分類を容易にするための特徴変換パラメータを設定した後、教示型分類器の学習により分類条件を設定する構成とする。
【0011】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器を直列に接続した構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、上流の分類器から順に、優先順位の高い欠陥クラスを割り当て、割り当てたクラスを高い正解率で他のクラスから分類するよう学習することにより、分類条件を設定する構成とする。
【0012】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器を有し、それぞれの分類結果を統合する機能を有する。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、クラス毎にそのクラスの正解率が高くなるようカスタマイズされた分類器の学習を行い、分類の優先順位に基づいて各分類器の重みづけ係数を設定する構成とする。
【0013】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器をツリー状に接続した構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と階層的な分類と階層別正解率目標を指定する機能を有する。また、教示された特徴量データをもとに、上流の分類器から順に、階層的な分類を行うようにし、階層別の目標を満たすように学習することにより、分類条件を設定する構成とする。
【発明の効果】
【0014】
本発明によれば、欠陥の特徴量と正解のクラスを対応づけて教示するとともに、分類の優先順位を指定することにより、特徴変換と一つ以上の教示型分類器の組合せ、あるいは複数の教示型分類器の組合せからなる欠陥分類の条件を、重要欠陥のピュリティまたはアキュラシーまたはその両方が目標値以上になるように設定することが可能となる。あるいは、誤分類をさせたくない欠陥種間の誤分類率を目標値以下に設定することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の欠陥分類装置の概略構成の第一の実施例を示す図である。
【図2】検査対象となる半導体ウェハの平面図である。
【図3】欠陥分類部および分類条件設定部のデータの流れを説明する図である。
【図4】欠陥判定部の第一の構成例を示す図である。
【図5】欠陥判定部の第二の構成例を示す図である。
【図6】欠陥判定部の第三の構成例を示す図である。
【図7】欠陥判定部の第四の構成例を示す図である。
【図8】分類の優先順位を指定するGUIの第一の例を示す図である。
【図9】特徴変換行列および分類条件を自動設定する処理のフローを表す図である。
【図10】優先順位つき目標の達成度評価の結果を表示するGUIの一例である。
【図11】分類の優先順位を指定するGUIの第二の例を示す図である。
【図12】階層別目標達成度評価の結果を表示するGUIの一例である。
【図13】階層別目標に基づいて分類条件を自動設定する処理のフローを表す図である。
【図14】分類条件設定部において欠陥クラスを教示するためのGUIの一例である。
【図15】分類器を直列につなげる場合の分類条件設定処理のフローを表す図である。
【図16】分類器を並列につなげる場合の分類条件設定処理のフローを表す図である。
【図17】本発明の欠陥分類装置の概略構成の第二の実施例を示す図である。
【発明を実施するための形態】
【0016】
以下に、図面を用いて実施例を詳細に説明する。
【実施例1】
【0017】
以下、本発明の第一の実施例を図1から16を用いて詳細に説明する。
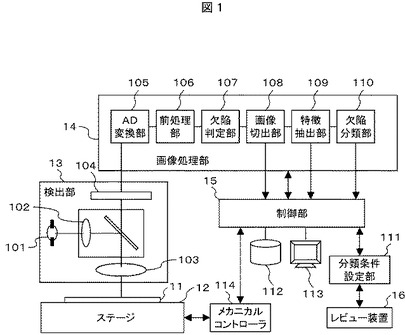
実施例として、半導体ウェハを対象とした光学式外観検査装置を例にとる。図1は装置の構成の一例を示したものである。11は半導体ウェハなどの被検査物、12は被検査物11を搭載し、移動させるステージ、13は検出部で、被検査物11を照射するための光源101、光源101から出射した光を集光する照明光学系102、照明光学系102で集光された照明光で被検査物11を照明し、反射して得られる光学像を結像させる対物レンズ103、結像された光学像を明るさに応じて画像信号に変換するイメージセンサ104により構成される。14は画像処理部で、検出部13で検出された画像により試料であるウェハ上の欠陥候補を検出する。ここで、光源101は、例えばランプ光源やレーザ光源であり、イメージセンサ104は、例えばCCDリニアセンサやTDIセンサ、あるいはフォトマルなどである。
【0018】
画像処理部14は、検出部13のイメージセンサ104からの入力信号をデジタル信号に変換するAD変換部105、AD変換されたデジタル信号に対してシェーディング補正、暗レベル補正等の画像補正を行う前処理部106、隣接するダイの対応する位置から検出された参照画像と検出画像の比較を行い、差の値が別途設定されたしきい値より大きい部分を欠陥として出力する欠陥判定部107、検出欠陥の位置を中心とし、予め定められたサイズで検出画像と参照画像を切出す画像切出部108、切出した画像から特徴量を算出する特徴抽出部109、算出した特徴量に基づいて欠陥を分類する欠陥分類部110から構成される。
【0019】
15は全体制御部で、検出された欠陥の座標、特徴量、画像などを記憶する記憶装置112、ユーザからの検査パラメータの変更を受け付けたり、検出された欠陥情報を表示したりするユーザインターフェース部113、各種制御を行うCPUで構成される。114は全体制御部からの制御指令に基づいてステージ12を駆動するメカニカルコントローラである。なお、図示していないが、画像処理部14、検出部13等も全体制御部15からの指令により駆動される。111は分類条件設定部であり、欠陥の特徴量に基づき欠陥クラスを決定する分類条件を設定する。
16はレビュー装置であり、検査装置には含まれないが、データの授受が可能なようになっている。
【0020】
次に、図1に示す検査装置による欠陥検出方法について説明する。
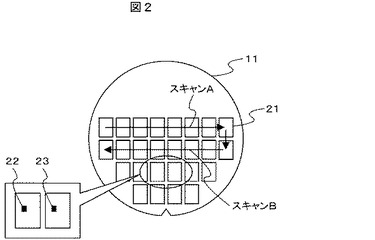
被検査物である半導体ウェハ11は、図2に示すように同一であるはずのパターンのダイ21が多数、規則的に並んでいる。隣接する2つのダイの同じ位置、例えば図2の領域22とそれに隣接するチップの領域23との間で画像を比較し、両者の間に差異がある部分を欠陥として検出する。
【0021】
その作用を説明すると、全体制御部15では、被検査物である半導体ウェハ11をステージ12により、例えば図2に示すスキャンAの方向と反対の方向へ連続的に移動させる。このステージ12の連続的な移動に同期して、検出部13のイメージセンサ104でスキャンAの方向に順次被検査物11の光学像が検出されて、チップの像が検出部13より取り込まれる。検出部13のイメージセンサ104は入力された信号を画像処理部14に出力する。画像処理部14では、まず入力されたアナログ信号をAD変換部105でデジタル信号に変換し、前処理部106にてシェーディング補正、暗レベル補正などを行う。
【0022】
欠陥判定部107では例えば、隣接する2つのダイの対応する領域の画像比較により、欠陥判定を行う。画像切出部108では、検出された欠陥の位置を中心として予め定められたサイズで検出画像を切出す。比較検査を行う場合の参照画像およびしきい値画像を切出すこともある。特徴抽出部109では、複数の欠陥候補各々について、切出した画像に基づいて欠陥のサイズを表す特徴量、欠陥の明るさを表す特徴量、欠陥の形状を表す特徴量、背景の情報を表す特徴量などの欠陥分類に用いる特徴量を算出する。
【0023】
欠陥分類部110では、予め分類条件設定部111で設定された条件を用いて分類を行い各欠陥のクラス情報を出力する。画像切出部108から出力される画像情報、特徴抽出部109から出力される欠陥の特徴量および欠陥分類部110から出力される欠陥クラス情報は、記憶装置112に保存される。また、ユーザインターフェース部113を介して、ユーザに提示される。
【0024】
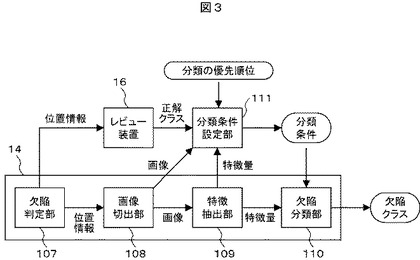
欠陥分類部110および分類条件設定部111の関係を、図3を用いて詳細に説明する。図3は、画像処理部14と分類条件設定部111の間のデータの流れを示したものである。上記作用により、欠陥判定部107は欠陥の位置情報を出力する。画像切出部108は、欠陥の位置情報をもとに欠陥部の画像を切り出して出力する。特徴抽出部109は、欠陥部画像から特徴量を抽出して出力する。欠陥分類部110は特徴量に基づいて欠陥を分類し欠陥クラス情報を出力する。分類条件設定時には、レビュー装置16は欠陥の座標を元に、レビュー、分類を行い欠陥のクラスおよびレビュー画像を出力する。分類条件設定部111は特徴抽出部109から出力される欠陥の特徴量とレビュー装置16から出力される欠陥クラスを対応付けたものを教示データとし、別途入力される分類の優先順位に基づき分類条件を設定し、分類条件を出力する。
【0025】
次に、欠陥分類部110における動作について、図4ないし図7を用いて説明する。
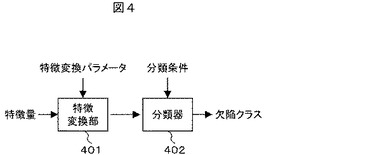
図4は、欠陥分類部110の第一の構成例である。特徴変換部401と分類器402からなる。特徴変換部401は、特徴量を入力し、予め設定された特徴変換パラメータを用いて特徴変換する。ここで、特徴変換パラメータは、分類条件設定部111において、指定された分類の優先順位に基づいて、優先順位の高い分類を容易にするように設定されるものとする。線形変換の場合M×Nの行列で表される。ただしMは変換後の特徴次元数、Nはもとの特徴次元数である。
【0026】
分類器402は、変換後の特徴量を入力し、予め設定された分類条件に基づいて欠陥分類を行い、欠陥クラス情報を出力する。分類器402としては、教示型の分類器であればなんでもよい。例えば、最近傍法、最小距離法、部分空間法、決定木法、ファジーボーティング法、フレキシブルナイブベイズ法、ニューラルネットワーク、サポートベクターマシン(SVM)などによるものが考えられる。複数の分類器を実装しておき、選択使用可能なようにしておくとよい。分類器の種類によって学習に必要なパラメータが異なるので、それに応じた入力が可能なようにしておく。分類条件として設定するものも分類器の種類によって異なるため、対応するフォーマットを準備しておく。
【0027】
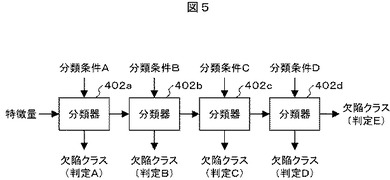
図5は、欠陥分類部110の第二の構成例である。複数の分類器402a〜402dを直列につなげた構成としている。一つ一つの分類器はあるクラスとその他のクラスを分類する2クラス分類器である。例えば分類器402aはクラスAとその他を分類する。その他と判定されたものは分類器402bに送られる。同様にクラスB、クラスCと順に判定していく。最後の分類器402dは残った2つのクラスDおよびEをそれぞれのクラスに分類するものである。分類器の種類は教示型であればどんなものでもよいが、2クラスの分類に適したものには、サポートベクターマシン(SVM)や線形判別法がある。
【0028】
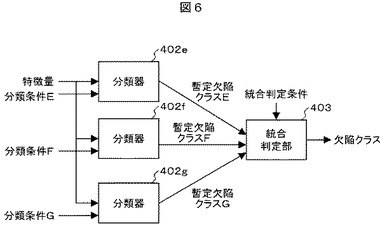
図6は、欠陥分類部110の第三の構成例である。複数の分類器402e〜402gを並列につなげたものと統合判定部403からなる。各分類器は各欠陥クラスに対応しており、そのクラスの正解率が高くなるよう分類条件E〜Gを設定されるものとする。分類器402e〜402gは、分類条件E〜Gに従って分類を行い、暫定欠陥クラスE〜Gを出力する。統合判定部403は、暫定欠陥クラスE〜Gと予め設定された統合判定条件に基づいて欠陥クラスの判定を行う。
【0029】
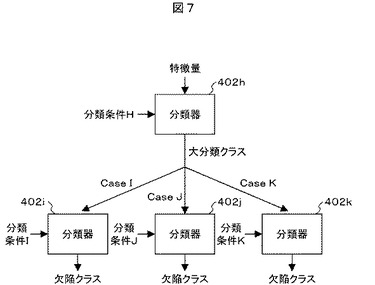
図7は、欠陥分類部110の第四の構成例である。複数の分類器をツリー状につなげた構成としている。分類器402hは入力した特徴量と分類条件Hに基づいて大分類を行い、大分類コードを出力する。大分類コードの判定によって分類器402i〜402kのいずれかに送られる。分類器402i〜402kは、対応する分類条件I〜Jに基づいて、分類を行い欠陥クラス情報を出力する。ここで、図7は、先頭の分類器の下に3個の分類器をつないだ構成を示しているが、つなぐ分類器の数は2個以上であれば何個でもよい。
また、さらにその下に2個以上の分類器をつないでもよく、図示する構成に限定されないものとする。
【0030】
次に、分類条件設定部111における動作について説明する。分類条件設定部111は、教示データの入力、分類の優先順位指定、分類条件の自動設定、設定条件による分類評価結果の表示を行う。これらは、一つ前の処理が実行されていなければ、実行できないものとする。分類の優先順位指定とは、例えば、特定の欠陥についてアキュラシーあるいはピュリティが高くなることを全体の正解率より優先したい、というような要望を指定する機能である。
【0031】
欠陥分類部110が図4に示すように特徴変換部と分類器からなる場合について、図8ないし図14を用いて説明する。
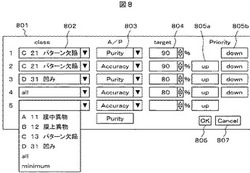
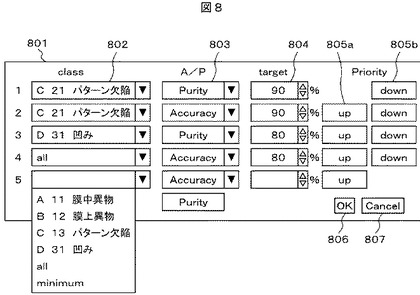
図8は、分類条件設定部111において分類の優先順位を指定するためのGUIの第一の例である。優先順位指定ウィンドウ801では、優先順位に対応づけて欠陥クラス、アキュラシーまたはピュリティの選択、目標性能を指定する。欠陥クラスは欠陥クラス選択リスト802から選択して指定する。リストには、教示データに含まれる全種類のクラスコードおよびクラス名と“all”、“minimum”が含まれている。“all”は全欠陥の正解率、“minimum”は各クラスのアキュラシーまたはピュリティの最悪値とする。アキュラシー・ピュリティ選択リスト803によりどちらかを選択し、目標設定ウィンドウ804への数値入力により、目標性能を設定する。設定は基本的に優先順位の上位から順に行うため、設定済みの項目のすぐ下の欄にのみ新しい項目が入力できるようになっている。設定後に優先順位変更ボタン805a、805bを用いて優先順位を変更することができる。
“up”を押すとすぐ上の項目と入れ替わり、“down”を押すとすぐ下の項目と入れ替わる。新しい項目を挿入したい場合は、一番下の欄に入力したのち“up”ボタンにより挿入したい箇所に移動させる。OKボタン806押下により、入力された設定が記憶され、優先順位の指定を終了する。キャンセルボタン807の押下により、入力された設定は破棄され、終了する。
【0032】
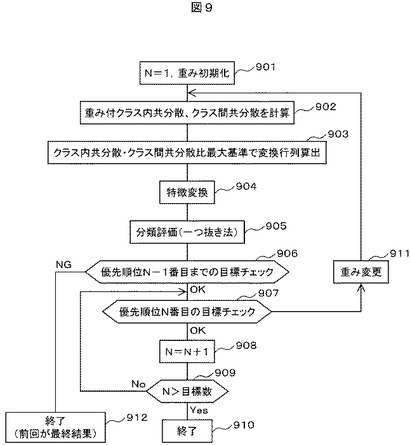
図9は、上記で指定された分類の優先順位に基づいて、図4に示す、特徴変換と分類器からなる欠陥分類の条件設定のフローを表す図である。特徴変換は線形変換とし、分類に適した特徴軸を設定するための変換行列を求めることを目的とする。分類に適した特徴軸とは、同じクラスは近くにあり、異なるクラスは遠くにあるような軸のことである。このため、線形判別法では、クラス内分散・クラス間分散比最大基準で変換行列を求めている。
【0033】
本発明では、クラス毎に求めているクラス内分散とクラス間分散に優先順位を考慮して重みづけを施すことにより、優先順位つきの目標を達成することを考える。最初に、N=1とおき、重みを初期化する。均一な重みとすればよい(901)。次に、重みつきのクラス内共分散およびクラス間共分散を求める(902)。クラス毎のクラス内分散とクラス間分散を線形判別法と同様に求めた上で、重みをかけて和を計算する。クラス毎の計算は、非特許文献1記載のパラメトリックな手法、非特許文献2記載のノンパラメトリックな手法と同様の計算方法でもよい。
【0034】
次に、クラス内分散・クラス間分散比最大基準で変換行列を求める(903)。次に教示した特徴量データを変換行列を用いて変換する(904)。次に、分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ評価を行う(905)。評価方法は1個をテストサンプルとし、残りを教示サンプルとする評価を欠陥数分繰り返す、リーブワンアウト法(一つ抜き法ともいう)が望ましい。教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計した、コンフュージョンマトリクスを出力する。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、最も良い結果となるものを選んでもよい。このとき、分類器選択は全ての分類器から行ってもよいし、予め範囲を指定しておいてもよい。
【0035】
次に、優先順位N-1番目までの目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(906)。目標達成していない場合は終了であり、前回の結果を最終結果とする(912)。前回は優先順位N-1番目までの目標を達成しているはずである。優先順位N-1番目まで目標達成している場合は優先順位N番目の目標をチェックする(907)。目標達成している場合は、Nを1個加算する(908)。Nが目標数を超えた場合は(909)、終了する(910)。そうでない場合はステップ907に戻る。ステップ907で目標達成していない場合は対応するクラスの分類しやすさを向上させるため、重みづけの変更を行い(911)、ステップ902に戻る。重みの変更は、対応するクラスの重みを増し、その他のクラスの重みを減じるよう、例えば数1に従って行う。
【0036】
【数1】

【0037】
ここでCはクラス数、wiはクラスiに関連付けられた重みである。iは優先順位に合わせてソートされているものとする。αは変更量を制御するパラメータである。ここで、重みの変更方法は上記に限定されるものではなく、各クラスについて目標との乖離度、余裕度を加味して加減量の制御を行ってもよい。また、ここまでの重みの変化量とクラス別のピュリティ、アキュラシーの変化量の関係を記録しておき、変化量の比をもとに加減量の制御を行ってもよい。
【0038】
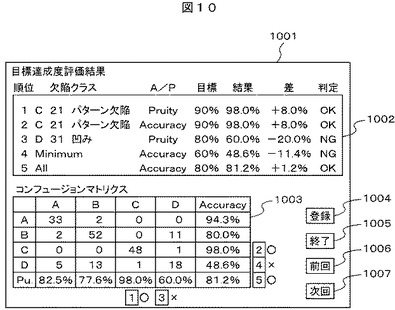
最終結果は、図8に示すGUIで優先順位をつけて指定された目標に対する達成度とともに表示される。図10は、目標達成度の評価を表示するGUIの例である。評価結果表示ウィンドウ1001には達成度評価結果表示ウィンドウ1002とコンフュージョンマトリクス1003が表示される。両者は同じ結果を異なる視点で表示したものである。
【0039】
達成度評価結果ウィンドウ1002には、優先順位順に欠陥クラス、アキュラシーまたはピュリティの選択、目標性能、性能評価結果、目標との差、判定を表示する。コンフュージョンマトリクス1003は教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計したものである。最右列にはアキュラシー、すなわち学習された分類条件による欠陥クラス別の正解率が表示される。最下段にはピュリティ、すなわち学習された分類条件によってある欠陥クラスに分類される欠陥のうちの、正しく分類された欠陥数の割合が表示される。右下コーナーには全体の正解率が表示される。
【0040】
目標性能を指定された項目について、アキュラシーの右あるいはピュリティの下に優先順位と判定を表示する。コンフュージョンマトリクスを表示することにより、どの欠陥クラスで誤りやすいかといった情報を得ることができる。評価結果に基づき、OKと判断した場合は登録ボタン1004押下により、最終的に得られた変換行列を用いて特徴変換を行い、最終的な分類器、パラメータを用い、教示データ全ての学習により分類条件を設定し、特徴変換行列とともに記憶装置112に登録して終了する。NGと判断した場合は終了ボタン1005押下により表示内容と最終的に得られた変換行列、最終的な分類器、パラメータを仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。これらのボタンにより、分類の優先順位指定を変更した場合にも、変更前後の違いを確認することができる。
【0041】
分類器の分類条件は分類器の種類によって異なる。例えば、最近傍法であれば、教示データの特徴変換後の特徴量と正解クラスをそのまま記憶しておく。最小距離法であれば、クラス毎の平均特徴量を計算しておく。
【0042】
分類の優先順位指定方法の別の例について図11ないし図13を用いて説明する。
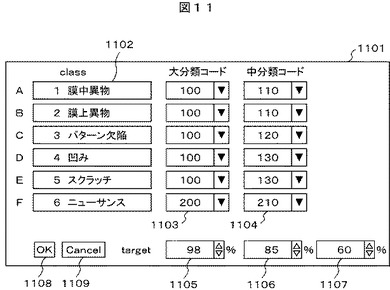
図11は、分類条件設定部111において分類の優先順位を指定するためのGUIの第二の例である。欠陥クラスを階層的に定義することにより、お互いに誤分類すると困るグループと、誤分類しても影響の小さいグループを区別しようという考え方である。階層的分類コード指定ウィンドウ1101では、定義済みの欠陥クラスが欠陥クラスウィンドウ1102にリストアップされている。お互いに誤分類すると最も困るグループに異なる大分類コードを割り当て、大分類コードウィンドウ1103で設定する。
【0043】
大分類コードは、100、200、300、…と100単位の数から選べるようにしておく。図11の例では、致命欠陥であるA〜EがFのニューサンスに誤分類されることが最も困るという考えの下に大分類コードを決めている。ひとつの大分類コードに3個以上の欠陥クラスがある場合は、お互いに誤分類すると次に困るグループに異なる中分類コードを割り当て、中分類コードウィンドウ1104で設定する。
【0044】
中分類コードは百の位の数字を大分類コードと同じとし、10単位の数から選べるようにしておく。図11の例では発生原因が異なる異物とパターン欠陥と凹欠陥を異なるグループとして中分類コードを決めている。ウィンドウ1105〜1107は目標設定ウィンドウである。ウィンドウ1105には大分類間、ウィンドウ1106には中分類間、ウィンドウ1107には中分類より細かい分類の、分類正解率目標を設定する。目標値は大分類を対象とするときは高く、だんだん低くなるよう設定しなければならない。OKボタン1108押下により、入力された設定が記憶され、終了する。キャンセルボタン1109
の押下により、入力された設定は破棄され、終了する。
【0045】
上記で指定された階層的分類コードと階層別の目標に基づいて、図4に示す、特徴変換と分類器からなる欠陥分類の条件設定を行う方法について説明する。前述の方法と同様、特徴変換は線形変換とし、分類に適した特徴軸を設定するための変換行列を求めることを目的とする。クラス内分散・クラス間分散比最大基準で変換行列を求める過程において、クラス毎に求めているクラス内分散とクラス間分散に階層的分類を考慮して重みづけを施す。
【0046】
まず、クラス内分散については重み一定とする。次に、クラス間分散については、クラスの組合せを、大分類をまたぐもの、大分類は同じだが中分類をまたぐもの、同じ中分類のものにわけ、分類正解率目標に応じた重みをかけて計算する。クラス内分散・クラス間分散比最大基準で変換行列を求め、特徴量データを変換する。分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ一つ抜き評価を行う。階層ごとにコンフュージョンマトリクスを計算し、表示する。
【0047】
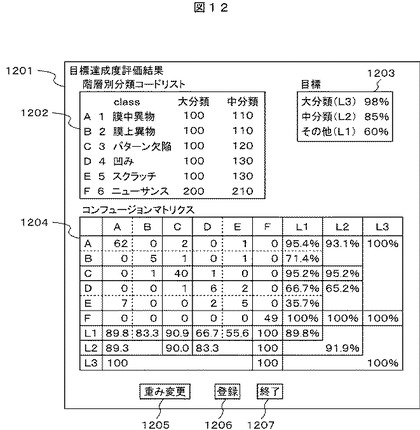
図12は、図11に示すGUIで階層毎に指定した目標に対する評価結果を表示するGUIの例である。評価結果表示ウィンドウ1201は、階層別分類コード表示ウィンドウ1202と階層別目標表示ウィンドウ1203とコンフュージョンマトリクス1204からなる。階層別分類コード表示ウィンドウ1202には、定義済みの欠陥クラスコード、欠陥クラス名、指定された大分類コードおよび中分類コードが表示されている。中分類コードが小さい順にソートされているものとする。
【0048】
A〜Eの記号は欠陥クラス毎に割り当てられており、コンフュージョンマトリクスとの対応付けがなされている。階層別目標表示ウィンドウ1203には、階層毎に設定した、分類正解率の目標が表示されている。コンフュージョンマトリクス1204は、教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計したものである。図に示すように、L1〜L3列にはアキュラシー、すなわち学習された分類条件による欠陥クラスまたは中分類コードまたは大分類コード別の正解率が表示される。L1は教示された欠陥クラス、L2は中分類コード、L3は大分類コードに対応している。
【0049】
L1〜L3段にはピュリティ、すなわち学習された分類条件によってある欠陥クラスまたは中分類コードまたは大分類コードに分類される欠陥のうちの、正しく分類された欠陥数の割合が表示される。L1〜L3列とL1〜L3段が交差する欄には全体の正解率が表示される。評価はまずL3列、L3段の数値と大分類の目標を比較する。図の例では目標を達成していることがわかる。
【0050】
次にL2列、L2段の数値と中分類の目標を比較する。図の例では、クラスDEのグループつまり中分類コード130のアキュラシー、ピュリティとも目標に達していないことがわかる。L1列、L1段の数値をその他の目標と比較すると、クラスEのアキュラシー、ピュリティが低いことがわかる。さらに詳細に調べると、クラスEの欠陥がクラスAに誤分類されることが多いことがわかる。
【0051】
このことから、クラスEとクラスAのクラス間分散の重みを増やして変換行列を算出すれば、目標を達成する方向に改善されると予想できる。重み変更ボタン1205押下により、図示はしないが重み変更ウィンドウが表示され、重みを変更することができる。変更後、再度特徴変換行列の計算が行われ、同様の処理を経て、評価結果表示ウィンドウ1201が表示される。改善の必要のない場合は、登録ボタン1206押下により、最終的に得られた変換行列を用いて特徴変換を行い、最終的な分類器、パラメータを用い、教示データ全ての学習により分類条件を設定し、特徴変換行列とともに記憶装置112に登録して終了する。目標を達成していないが改善を断念する場合は終了ボタン1207押下により何もしないで終了する。
【0052】
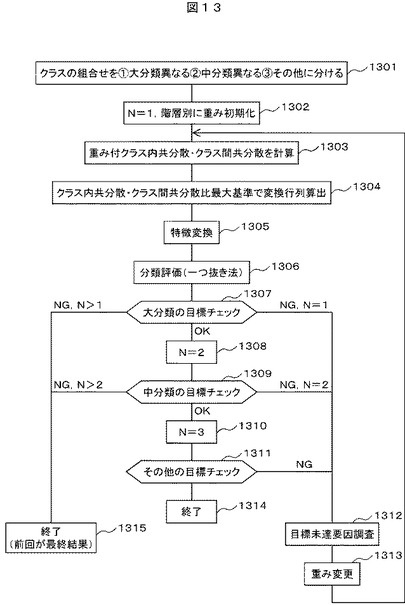
上記の重み変更を自動化することも考えられる。図13は、階層的分類コードと階層別の目標に基づいて、特徴変換行列を自動算出するためのフローを表す図である。最初に、クラスの組合せを、大分類が異なるもの、大分類は同じだが中分類が異なるもの、その他に分ける(1301)。次に、N=1とおき、階層別の目標に応じて重みを初期化する(1302)。次に、重みつきのクラス内共分散およびクラス間共分散を求める(1303)。クラス毎のクラス内分散とクラス間分散を線形判別法と同様に求めた上で、重みをかけて和を計算する。
【0053】
次に、クラス内分散・クラス間分散比最大基準で変換行列を求める(1304)。次に教示した特徴量データを変換行列を用いて変換する(1305)。次に、分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ、リーブワンアウト法で評価を行う(1306)。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、最も良い結果となるものを選んでもよい。
【0054】
図12に示すコンフュージョンマトリクスを計算しておく。次に、大分類の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1307)。OKならばN=2として(1308)、中分類の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1309)。OKならばN=3として(1310)、その他の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1311)。
OKならば終了である(1314)。目標をすべて達成しているはずである。ステップ1307において目標達成していない場合、N>1ならば終了であり、前回の結果を最終結果とする(1315)。前回は大分類の目標を達成しているはずである。ステップ1309において目標達成していない場合、N>2ならば終了であり、前回の結果を最終結果とする(1315)。前回は中分類および大分類の目標を達成しているはずである。
【0055】
重みの変更により既に達成していた目標を達成できなくなった場合はもとに戻して、これ以上の重み変更を行わないということである。ステップ1307、1309、1311において、目標達成していないが上記に当てはまらない場合は、コンフュージョンマトリクスに基づいて、目標未達の要因となるクラスの組合せを見つける(1312)。例えば前述のクラスAとEである。目標未達の要因となるクラスの組合せのクラス間を分離させるため、重みづけの変更を行い(1313)、ステップ1303に戻る。重みづけの変更は、対応するクラスの組合せの重みを増し、その他の組合せの重みを減じるようにする。
【0056】
分類の優先順位指定方法の方法は上記の二例に限定されない。重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。アキュラシーとピュリティの目標を1個だけ定め、前者の場合は重要な欠陥クラスのうちアキュラシーおよびピュリティが低いものから目標を達成するよう学習するとよい。後者の場合は優先順に目標を達成するよう学習するとよい。
【0057】
以上により、特徴変換部401と分類器402からなる欠陥分類部110を有する欠陥分類装置において、ユーザが指定した分類の優先順位に基づいて、優先順位の高い分類の正解率を高くするよう、分類条件を設定することが可能となる。すなわち、第一の例によれば、重要な欠陥を見逃さないようにする、あるいは重要な欠陥のピュリティを高くするなどのニーズに応えることが可能となる。最低アキュラシーの目標を設定することにより、落ちこぼれをなくすことも可能となる。第二の例によれば、致命欠陥と非致命欠陥のように、誤分類したくない欠陥クラスの組合せについて、そのクラス間の誤分類を低減するなどのニーズに応えることが可能となる。
【0058】
以上の説明において、欠陥分類部の入力となる特徴量データは、特徴抽出部109の出力をそのまま使うこととしていたが、特徴量毎にx=(x-μ)/σの式により標準化しておくとよい。ここでxは特徴量の値、μは平均、σは標準偏差である。特徴量が非負の場合、1以下の0でない実数λを用いて特徴量の値をλ乗してスケールを変換してから標準化を行うと、正解率が向上する場合がある。また、特徴量間の比をとるなど、なんらかの演算を行って新しい特徴量を追加したものを用いてもよい。このような特徴量の変換、追加は、特徴抽出部109の内部で行うようにするとよい。
【0059】
以上の説明では、欠陥クラスの情報はレビュー装置16の出力としていたが、図3に示す構成において、欠陥判定部107から欠陥座標、画像切出部108から検査画像、レビュー装置16からレビュー画像を、分類条件設定部111に集めて、目視分類によって教示データを作成する構成としてもよい。
【0060】
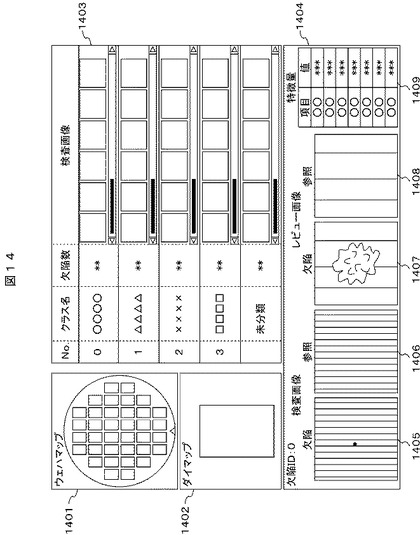
図14は、分類条件設定部111において、検査画像およびレビュー画像を表示して目視分類するための欠陥教示GUIの例である。ウェハマップ表示ウィンドウ1401、ダイマップ表示ウィンドウ1402にはそれぞれウェハ上またはダイ上の欠陥位置を表すマップを表示される。検査画像表示ウィンドウ1403には、欠陥クラス毎に欠陥ID順に検査画像が表示される。全ての欠陥が重複なくいずれかのクラスまたは未分類の欄に表示される。画像のドラッグアンドドロップによって、対応する欠陥の欠陥クラスを教示することができる。検査情報詳細表示ウィンドウ1404には、選択された欠陥の検査装置による欠陥画像1405、参照画像1406、レビュー装置による欠陥画像1407、参照画像1408、特徴量一覧1409が表示される。欠陥の選択は、ウェハマップ上での欠陥点のクリック、ダイマップ上での欠陥点のクリック、検査画像表示ウィンドウ1403上での検査画像のクリックのいずれかによってなされる。この方法によれば、レビューしていない欠陥についても検査画像に基づいて欠陥クラスを教示することが可能である。判別できなければ、未分類の欄に残しておけばよい。したがって、教示サンプル数を増やすことができ、その結果正しい分類条件設定が可能となる。このように目視分類した結果は、クラス情報付特徴量データとして記憶装置112に記憶しておくとよい。
【0061】
次に、欠陥分類部110が図5に示すように複数の分類器を直列につなげた構成である場合の分類条件設定部111における動作について、図15を用いて説明する。
分類の優先順位の指定は、図8に示すGUIを用いて、クラス毎のピュリティおよびアキュラシーの目標を優先順位をつけて設定するものとする。上流の分類器から順に、優先順位の高い欠陥クラスを割り当て、割り当てたクラスを高い正解率で他のクラスから分類するよう学習することにより、分類条件を設定する構成とする。
【0062】
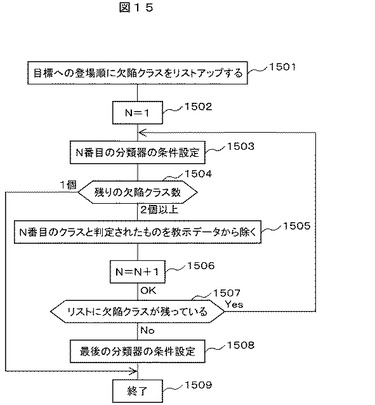
図15は、分類器を直列につなげた構成の欠陥分類の条件設定フローを表す。まず、欠陥クラスを設定した目標への登場順にリストアップする(1501)。欠陥クラス毎のピュリティおよびアキュラシーの目標は記録しておく。N=1とし(1502)、N番目の欠陥クラスと他のクラスを分類するN番目の分類器の分類条件を設定する(1503)。N=1のとき、図5の分類器402aがこれに相当する。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価する。ここで上流の分類器で誤分類してしまったものもアキュラシーの計算に含めることとする。アキュラシーが目標を達成したものの中から、ピュリティが最も高くなるものを選ぶとよい。ピュリティが低いと他の欠陥クラスのアキュラシー低下をまねくからである。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。残りの欠陥クラス数が1個ならば(1504)、終了する(1509)。N番目の分類器でその他のクラスに判定されたものは残りの1個の欠陥クラスと判定する。
【0063】
次に、教示データから、N番目の分類器でN番目のクラスに判定されたもの、つまり図5に示す分類器402から下向きに出て行くデータを除く(1505)。Nを1個加算する(1506)。ステップ1501で作成したリストに欠陥クラスが残っていれば(1507)、ステップ1503に戻る。残っていなければ、設定した目標に登場しない残りの欠陥クラスを分類するための最後の分類器の分類条件を設定する(1508)。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価する。全体正解率または最低アキュラシーが最も高いものを選択する。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。
【0064】
この場合も、重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。ピュリティおよびアキュラシーの目標を一個だけ決めることにより、上記と同様の処理が可能となる。
【0065】
図11に示す結果表示ウィンドウ1001を表示し、登録ボタン1004押下により、個々の分類器の分類条件を登録して終了、終了ボタン1005押下により、表示内容と最終的な分類器、パラメータと分類器の配置を仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。
【0066】
次に、欠陥分類部110が図6に示すように複数の分類器を並列につなげた構成である場合の分類条件設定部111における動作について、図16を用いて説明する。分類の優先順位の指定は、図8に示すGUIを用いて、クラス毎のピュリティおよびアキュラシーの目標を優先順位をつけて設定するものとする。統合判定部403は各分類器の結果の重み付投票により欠陥クラスを決定するものとする。すなわち、次式で算出されるクラスkの得票P(Ck)が最大となるkと決定する。
【0067】
【数2】
【0068】
ただし、Pi(Cj)は、i番目の分類器でクラスjと判定されれば1、その他と判定されれば0とする。クラス毎にそのクラスの正解率が高くなるようカスタマイズされた分類器の学習を行い、分類の優先順位に基づいて重みづけ係数wjk(i)を設定する構成とする。
【0069】
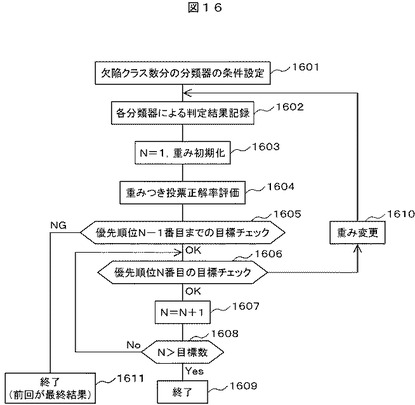
図16は、分類器を並列につなげた構成の欠陥分類の条件設定フローを表す。まず、欠陥クラス数分の分類器の分類条件を設定する(1601)。N番目の分類器では、N番目の欠陥クラスの正解率が高くなるようにする。例えば、分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価し、N番目の欠陥クラスのピュリティまたはアキュラシーの低い方が、最も高くなるものを選択するとよい。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。各分類器による教示データの判定結果を調べておく(1602)。その後、重みwjk(i)を設定する。まず、N=1とし、重みの初期設定を行う(1603)。j=kのとき1、そうでなければ0とする。あるいは、ステップ1601で得られるコンフュージョンマトリクスに基づいて、以下の通り計算する。
【0070】
【数3】
【0071】
分母は分類器iでクラスjと判定された欠陥数、分子はうち真のクラスがクラスkの欠陥数である。
【0072】
次に、全ての教示データについて、ステップ1602で算出した判定結果を用いて重み付投票を行い、統合判定を行う(1604)。教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計した、コンフュージョンマトリクスを出力する。
【0073】
次に、優先順位N-1番目までの目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1605)。目標達成していない場合は終了であり、前回の結果を最終結果とする(1611)。前回は優先順位N-1番目までの目標を達成しているはずである。優先順位N-1番目まで目標達成している場合は優先順位N番目の目標をチェックする(1606)。目標達成している場合は、Nを1個加算する(1607)。Nが目標数を超えた場合は(1608)、終了する(1609)。そうでない場合はステップ1606に戻る。
【0074】
ステップ1606で目標達成していない場合は対応するクラスの分類しやすさを向上させるため、重みづけの変更を行い(1610)、ステップ1603に戻る。重みづけの変更は、N番目の目標に関連するクラスをmとするとm番目の分類器に関連する重みwm*(*)を増し、その他の重みを減じるようにする。ここで、重みの変更方法は上記に限定されるものではなく、各クラスについて目標との乖離度、余裕度を加味して加減量の制御を行ってもよい。また、ここまでの重みの変化量とクラス別のピュリティ、アキュラシーの変化量の関係を記録しておき、変化量の比をもとに加減量の制御を行ってもよい。
【0075】
図11に示す結果表示ウィンドウ1001を表示し、登録ボタン1004押下により、個々の分類器の分類条件と統合判定条件を登録して終了、終了ボタン1005押下により、表示内容と最終的な分類器、パラメータと分類器の配置、統合判定における重みを仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。
【0076】
また、N番目の分類器はN番目の欠陥クラスとその他のクラスを分類する2クラス分類器としてもよい。その他クラスと判定された場合は、j≠iについてPi(Cj)=1/(M-1)(Mはクラス数)とおけば、上記と同様に処理できる。
また、欠陥クラス毎にカスタマイズするのではなく、異なる種類の分類器を全体の正解率あるいは最低アキュラシーが最も高くなるよう学習してもよい。統合の重み設定は上記と同様とする。
分類の優先順位の指定方法としては、重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。ピュリティおよびアキュラシーの目標を一個だけ決めることにより、上記と同様の処理が可能となる。
【0077】
次に、欠陥分類部110が図7に示すように複数の分類器をツリー状につなげた構成である場合の分類条件設定部111における動作について、図16を用いて説明する。
【0078】
分類の優先順位の指定は、図9に示すGUIを用いて、階層的分類コードと階層別目標を設定するものとする。初めに、大分類コードに従って分類する分類器の分類条件を設定する。図7の分類器402hに相当するものである。
【0079】
教示された特徴量データを用い、欠陥クラスを大分類コードに付け替えた上で、分類器の学習を行う。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価して、最も良い結果となるものを選ぶとよい。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。
【0080】
次に、各大分類コードについて以下を実施する。注目する大分類に2個以上の中分類コードが含まれる場合、中分類コードに従って分類する分類器を最初の分類器の下につなぎ、分類条件の設定を行う。最初の分類器によって注目する大分類に分類される教示データを抽出し、欠陥クラスを中分類コードに付け替えた上で分類器の学習を行う。注目する大分類に、中分類コードが1個しか含まれない場合、含まれる欠陥クラスの数により処理が異なる。欠陥クラスが1個の場合、注目する大分類と判定されたものは、その欠陥クラスであると判定する。欠陥クラスが2個以上の場合、それらを分類する分類器を最初の分類器の下につなぎ、分類条件を設定する。最初の分類器によって注目する大分類に分類される教示データを抽出し、分類器の学習を行う。最初の分類器の下につながる分類器は最大で大分類コードの数である。
【0081】
次に、各中分類コードについて、以下を実施する。注目する中分類に2個以上の欠陥クラスが含まれる場合、それらを分類する分類器を2段目の分類器の下につなぎ、分類条件の設定を行う。最初と2段目の分類器によって注目する中分類に分類される教示データを抽出し、分類器の学習を行う。注目する中分類に欠陥クラスが1個しか含まれない場合、注目する中分類と判定されるものはその欠陥クラスと判定する。
【0082】
図12に示す結果表示ウィンドウ1201を表示し、登録ボタン1206押下により、分類器の接続関係と個々の分類器の分類条件を登録して終了、終了ボタン1207押下により、何もしないで終了する。
【0083】
本発明の欠陥分類方法および装置は、本実施例における装置構成に限定するものではない。
例えば、検出系13を暗視野式あるいはSEM式とした場合にも同様の構成として、分類条件設定が可能である。また、暗視野光学系において、異なる角度から検出する検出光学系を設け、2センサまたはそれ以上で画像検出し、それぞれに欠陥検出、画像切り出し、特徴抽出して得られる特徴量データを、併せて用いて欠陥分類する構成としてもよい。2回またはそれ以上の検査を異なる光学条件で行い、検出された欠陥の座標突合せを行った上で、得られる特徴量データを併せて欠陥分類する構成としてもよい。あるいは、それぞれの検査条件で得られた特徴量データを用いて個別に分類条件を設定する構成としてもよい。
【0084】
検査実行時には、検査条件に対応する分類条件に従って分類を行い、欠陥クラスとともにその信頼度、例えばその欠陥クラスのピュリティなど(分類条件設定時に算出しておく)の情報を付加しておき、検出された各欠陥について、複数の検査で付加された欠陥クラスの多数決あるいは信頼度重み付多数決で欠陥クラスを決定する構成とする。
【0085】
また、これまで同一の形状となるパターンが形成されたウェハの比較による外観検査を例にとって説明してきたが、本発明の欠陥分類方法は、パターンなしウェハの欠陥分類にも適用可能である。パターンなしウェハの欠陥検出方式について説明する。回転ステージに保持されたウェハにレーザ光を照射し、ウェハ表面の散乱光を集光し、センサにより検出する。異なる角度に配置したセンサにより同様に散乱光を検出する。このような検出系は全方位をカバーするように構成するとよい。検出信号と予め設定されたしきい値を比較することにより、欠陥を検出する。複数の検出系のうち、一箇所でもしきい値を超えたものは欠陥として検出するようにする。欠陥の大きさ、形状によって強い散乱光が発生する方向が異なるため、複数の検出系で検出された信号の大きさと検出系間の比率を特徴量データとして、欠陥分類を行うことができる。抽出した特徴量データは、パターンつきウェハ検査装置の特徴量データと同様の処理が可能である。したがって、上記の方法で分類条件を設定することができる。
【0086】
本発明の欠陥分類方法は、さらに、ハードディスク基板、PDP、TFT、ホトマスク、フィルムなどの欠陥分類にも適用可能である。対象物に光または電子線を照射して、検出信号あるいは画像を取得し、信号処理または画像処理により正常からの逸脱を欠陥として検出する外観検査すべてに適用可能である。このような外観検査においては検出信号あるいは画像から、信号処理または画像処理により特徴量を算出することができ、算出した特徴量は上記説明と同様の処理を施すことができる。また、欠陥位置情報に基づき欠陥の高倍率の観察像を取得する、レビューにも適用可能である。
【実施例2】
【0087】
第一の実施例では、分類条件設定部において目標達成度を評価した後、設定した分類条件を採用(保存)するかどうかのみ、ユーザが判断していた。しかし、目標に到達しない場合に、妥協して採用するか、欠陥分類を断念するかの選択肢しかなく、ニーズに応えられないことも考えられる。第二の実施例では、ユーザに他の選択肢を提供することを考える。
【0088】
以下、本発明の第二の実施例を図17を用いて詳細に説明する。
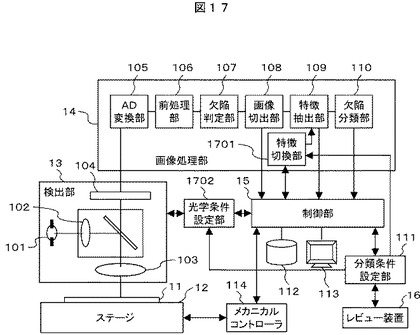
実施例として、半導体ウェハを対象とした光学式外観検査装置を例にとる。図17は装置の構成の一例を示したものである。構成、動作とも第一の実施例とほぼ同じであるため、異なる部分を説明する。特徴切換部1701は、特徴抽出部109において算出する特徴量を指定する。特徴切換部1701を備えるのは、検査対象や光学条件によって分類に有効な特徴量が異なるためである。算出可能な特徴量全部を使用するのではなく、選択して使用することにより、分類に無関係な特徴量により分類性能が低下するのを防ぐとともに、特徴量の計算時間をセーブすることが可能となる。光学条件設定部1702は、全体制御部15によってコントロールされ、検出部13の調整により光学条件の変更を行う。明視野検出の場合、照明の強さ、波長、偏光、NA、検出側の偏光、NA、空間フィルタリング、倍率など、暗視野検出の場合、それらに加えてに照明の方位、仰角、検出の方位、仰角などが条件変更のパラメータとなる。
【0089】
動作について説明する。ある検査対象について初めて分類条件設定を行う場合は実施例1と同様の方法で分類条件設定を行う。ただし、欠陥位置情報とレビューによる正解クラス、検査画像、特徴量は対応付けて記憶装置112に保存しておく。指定した目標を達成できず、妥協あるいは目標を下げてやり直すなどの選択を望まない場合、ユーザの指定により、特徴切換えまたは光学条件変更を行った後、再度分類条件設定を行う。図10あるいは図12に示す評価結果表示用のGUIに、図示はしていないが、特徴量変更ボタンおよび光学条件変更ボタンを表示しておくとよい。
【0090】
特徴量変更ボタン押下により、特徴切換部1701は、特徴切換え用GUIを表示する。算出する特徴量のリストを複数表示し、どのリストを使用するかユーザに選択させる。
これまでに選択されていたリストの次のリストを自動的に選択して以降の処理に進んでもよい。
【0091】
また、複数のリストから自動的にランダムに選択して新しいリストを作成、登録し、これを選択してもよい。特徴量の切換えが終わると、特徴抽出部109は、記憶装置112から欠陥位置情報および欠陥画像を読み出す。選択した特徴量リストに従って特徴量の算出を行い、分類条件設定部111に転送する。
【0092】
あるいは、初回に算出可能な全ての特徴量を算出して記憶装置112に保存しておき、特徴量リストに従って特徴量を選択して分類条件設定部111に転送するようにしてもよい。
【0093】
分類条件設定部111は、レビューによる正解クラスを読み出して特徴量データと対応付ける。既に設定してある分類の優先順位に基づいて、実施例1と同様の方法で分類条件の設定を行う。目標を達成していれば、分類条件を登録するとよい。達成していなければ、妥協して登録するか、分類を断念して終了するか、特徴量または光学条件を変更して再度条件設定を行うか、の選択を行う。特徴切換え部において、3回目以降であれば、それまでの特徴量リストと目標達成度の関係を調べて、特徴量別の影響度を算出し、影響度の高いものを選択して新しいリストを作成、登録し、これを選択してもよい。
【0094】
光学条件変更ボタン押下により、光学条件設定用GUIが表示される。前述の光学条件を決めるパラメータそれぞれについて選択可能な状態をリストから選べるようにしておく。設定に従って光学条件を変更し、ステージ走査を行って、欠陥判定部107において欠陥判定を行う。ここで検出された欠陥と記憶装置112に保存された欠陥情報を用い、欠陥位置に基づいて突合せを行い、和集合を作成する。欠陥情報には、各光学条件で検出されたか否かの情報を付加しておく。画像切出部108は、和集合の欠陥位置情報に基づいて、検査画像を切出す。特徴抽出部109は検査画像から特徴量の算出を行う。分類条件設定部111は、算出された特徴量データとレビューによる正解クラスの対応付けを行う。
【0095】
図14に示すGUIを用いて、教示データを増やすとよい。もちろん、レビューによって教示データを増やしてもよい。その場合は、図14に示すGUIを用いて、検査画像による目視判定が難しいものを選択できるようにしておくとよい。分類条件設定部111は、既に設定してある分類の優先順位に基づいて、実施例1と同様の方法で分類条件の設定を行う。目標を達成していれば、分類条件を登録するとよい。達成していなければ、妥協して登録するか、分類を断念して終了するか、特徴量または光学条件を変更して再度条件設定を行うか、の選択を行う。
【0096】
ここで、光学条件のユーザの選択にまかせてもよいし、予め決められたルールに従って順に変更するのでもよい。タグチメソッドのような手法を用いて光学条件のパラメータセットを作成しておいて、順に実行し、目標達成度の推移から良いパラメータを選択し、その後、再度選択したパラメータを用いて検査を実行して特徴算出し、分類条件を設定してもよい。さらに、タグチメソッドのような手法を用いて複数の光学条件のパラメータセットを作成しておいて、順に検査を行って、検出欠陥の位置情報の突合せにより和集合を作成し、レビューを行って正解クラスを教示した後、同じ光学系条件で検査を行い、画像切出し、特徴抽出を行い、分類条件を設定し、目標達成度が最も高い光学条件を選んで分類条件を設定してもよい。または目標達成度に基づいて良いパラメータを選択し、その後、再度選択したパラメータを用いて検査を実行して特徴算出し、分類条件を設定してもよい。
【産業上の利用可能性】
【0097】
本発明は、半導体ウェハ、ハードディスク基板などの薄膜デバイス、PDP、TFTなどの薄型ディスプレイ、ホトマスク、フィルムなどを対象とした外観検査装置における、欠陥分類に適用可能である。
【符号の説明】
【0098】
11…被検査物(半導体ウェハ)、12…ステージ、13…検出部、14…画像処理部、15…制御部、16…レビュー装置、101…光源、102…照明光学系、103…対物レンズ、104…イメージセンサ、105…AD変換部、106…前処理部、107…欠陥判定部、108…画像切出部、109…特徴抽出部、110…欠陥分類部、111…分類条件設定部、112…記憶装置、113…ユーザインターフェース部、114…メカニカルコントローラ、401…特徴変換部、402…分類器、403…統合判定部、1701…特徴切換部、1702…光学条件設定部。
【技術分野】
【0001】
本発明は、半導体ウェハ、ハードディスク基板などの薄膜デバイス、PDP、TFTなどの薄型ディスプレイ、ホトマスク、フィルムなどを対象とした、ランプ光もしくはレーザ光、或いは電子線などを用いて得られた対象物の画像に基づいて微細なパターン欠陥や異物等を検出し、欠陥分類を行う欠陥分類方法および装置に関する。
【背景技術】
【0002】
半導体ウェハ、液晶ディスプレイ、ハードディスク磁気ヘッドなどの薄膜デバイスは多数の加工工程を経て製造される。このような薄膜デバイスの製造においては、歩留まり向上及び安定化を目的として、いくつかの一連の工程毎に外観検査が実施される。外観検査では対象のデバイス表面を、ランプ光、レーザ光または電子線などを用いて照射し、反射光、散乱光または二次電子などを検出して得られた画像を元に、パターン欠陥あるいは異物などの欠陥を検出する。パターン付半導体ウェハの場合、本来同一になるように形成されたパターンの2つの対応領域の画像を検出し、位置合せを行った上で差を算出し、別途定めたしきい値と比較して差が大きくなる部分を欠陥あるいは異物として検出する。同時に、欠陥部の画像から輝度、サイズなどの欠陥の特徴量を算出し、それらに基づいて欠陥を分類する。
【0003】
例えば、特許文献1には、落射照明と斜方照明による散乱光強度の違いに応じて凸欠陥である異物と凹欠陥であるスクラッチを分類する検査装置が開示されている。このような欠陥分類機能を有する検査装置の欠陥分類条件を決める際にはレビューによって分類すべきクラスを教示し、特徴量とクラスの関係を導く必要がある。上記の例では分類すべきクラスとは異物あるいはスクラッチのいずれかであり、落射照明時の散乱光強度、斜方照明時の散乱光強度を特徴量とし、2次元の散布図をもとに弁別線を手動で設定している。
【0004】
その他、分類手法には教示型とルールベース型がある。教示型は、正解クラスと対応付けられた特徴量データの教示によって、自動的に分類器を構成するものである。特徴量空間上での距離がもっとも近い教示済み欠陥のクラスへ分類する方法や、教示データに基づいて各欠陥クラスの特徴量分布を推定しておき、分類しようとする欠陥の特徴量の生起確率が最も高いクラスへ分類する方法などが教示型の分類である。ルールベース型とは、if-then-elseで記述されるルールに従って分類する方法である。ルールは特徴量に対するしきい値で表現されることが多い。特許文献1記載の分類方法もこのルールベース型の一種である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−257533号公報
【非特許文献】
【0006】
【非特許文献1】Pi-Fuei Hsieh, Deng-Shiang Wang, Chia-Wei Hsu : "A Linear Feature Extraction for Multiclass Classification Problems Based on Class Mean and Covariance Discriminant Information", IEEE Transactions on Pattern Analysis and Machine Intelligens, Vol.28, No.2, pp.223-235 (2006/2)
【非特許文献2】Bor-Chen Kuo, David A Landgrebe : "Nonparametric Weighted Feature Extraction for Classification", IEEE Transactions on Geoscience and Remote Sensing, Vol.42, No.5, pp.1096-1105 (2004/5)
【発明の概要】
【発明が解決しようとする課題】
【0007】
教示型の欠陥分類はデータを入力すると自動的に分類条件が設定されるが、ブラックボックスであるため、ユーザの意図を反映させることができず、条件の解釈もできない。ユーザの意図とは、例えば重要欠陥のピュリティまたはアキュラシーまたはその両方が目標値以上になるように調整することである。
【0008】
一方、ルールベース型の欠陥分類は、理論と経験に基づいて条件設定が可能であり、使用者にとって理解しやすいという利点があるが、特徴量の種類や、欠陥クラスの種類が多くなってくると、手動での条件設定は困難になる。
【0009】
本発明の目的は、上記ユーザの意図を反映可能な分類条件設定機能を有する欠陥分類方法及び装置を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含む。欠陥分類部は、特徴変換を施した後、少なくとも一つの教示型分類器を用いて欠陥分類を行う構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、優先順位の高い分類を容易にするための特徴変換パラメータを設定した後、教示型分類器の学習により分類条件を設定する構成とする。
【0011】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器を直列に接続した構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、上流の分類器から順に、優先順位の高い欠陥クラスを割り当て、割り当てたクラスを高い正解率で他のクラスから分類するよう学習することにより、分類条件を設定する構成とする。
【0012】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器を有し、それぞれの分類結果を統合する機能を有する。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と分類の優先順位を指定する機能を有する。また、教示された特徴量データをもとに、クラス毎にそのクラスの正解率が高くなるようカスタマイズされた分類器の学習を行い、分類の優先順位に基づいて各分類器の重みづけ係数を設定する構成とする。
【0013】
あるいは、本発明の欠陥分類方法および装置は、特徴量抽出部、欠陥分類部、分類条件設定部を含み、欠陥分類部は、複数の分類器をツリー状に接続した構成とする。分類条件設定部は、欠陥の特徴量と正解のクラスを対応づけて教示する機能と階層的な分類と階層別正解率目標を指定する機能を有する。また、教示された特徴量データをもとに、上流の分類器から順に、階層的な分類を行うようにし、階層別の目標を満たすように学習することにより、分類条件を設定する構成とする。
【発明の効果】
【0014】
本発明によれば、欠陥の特徴量と正解のクラスを対応づけて教示するとともに、分類の優先順位を指定することにより、特徴変換と一つ以上の教示型分類器の組合せ、あるいは複数の教示型分類器の組合せからなる欠陥分類の条件を、重要欠陥のピュリティまたはアキュラシーまたはその両方が目標値以上になるように設定することが可能となる。あるいは、誤分類をさせたくない欠陥種間の誤分類率を目標値以下に設定することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の欠陥分類装置の概略構成の第一の実施例を示す図である。
【図2】検査対象となる半導体ウェハの平面図である。
【図3】欠陥分類部および分類条件設定部のデータの流れを説明する図である。
【図4】欠陥判定部の第一の構成例を示す図である。
【図5】欠陥判定部の第二の構成例を示す図である。
【図6】欠陥判定部の第三の構成例を示す図である。
【図7】欠陥判定部の第四の構成例を示す図である。
【図8】分類の優先順位を指定するGUIの第一の例を示す図である。
【図9】特徴変換行列および分類条件を自動設定する処理のフローを表す図である。
【図10】優先順位つき目標の達成度評価の結果を表示するGUIの一例である。
【図11】分類の優先順位を指定するGUIの第二の例を示す図である。
【図12】階層別目標達成度評価の結果を表示するGUIの一例である。
【図13】階層別目標に基づいて分類条件を自動設定する処理のフローを表す図である。
【図14】分類条件設定部において欠陥クラスを教示するためのGUIの一例である。
【図15】分類器を直列につなげる場合の分類条件設定処理のフローを表す図である。
【図16】分類器を並列につなげる場合の分類条件設定処理のフローを表す図である。
【図17】本発明の欠陥分類装置の概略構成の第二の実施例を示す図である。
【発明を実施するための形態】
【0016】
以下に、図面を用いて実施例を詳細に説明する。
【実施例1】
【0017】
以下、本発明の第一の実施例を図1から16を用いて詳細に説明する。
実施例として、半導体ウェハを対象とした光学式外観検査装置を例にとる。図1は装置の構成の一例を示したものである。11は半導体ウェハなどの被検査物、12は被検査物11を搭載し、移動させるステージ、13は検出部で、被検査物11を照射するための光源101、光源101から出射した光を集光する照明光学系102、照明光学系102で集光された照明光で被検査物11を照明し、反射して得られる光学像を結像させる対物レンズ103、結像された光学像を明るさに応じて画像信号に変換するイメージセンサ104により構成される。14は画像処理部で、検出部13で検出された画像により試料であるウェハ上の欠陥候補を検出する。ここで、光源101は、例えばランプ光源やレーザ光源であり、イメージセンサ104は、例えばCCDリニアセンサやTDIセンサ、あるいはフォトマルなどである。
【0018】
画像処理部14は、検出部13のイメージセンサ104からの入力信号をデジタル信号に変換するAD変換部105、AD変換されたデジタル信号に対してシェーディング補正、暗レベル補正等の画像補正を行う前処理部106、隣接するダイの対応する位置から検出された参照画像と検出画像の比較を行い、差の値が別途設定されたしきい値より大きい部分を欠陥として出力する欠陥判定部107、検出欠陥の位置を中心とし、予め定められたサイズで検出画像と参照画像を切出す画像切出部108、切出した画像から特徴量を算出する特徴抽出部109、算出した特徴量に基づいて欠陥を分類する欠陥分類部110から構成される。
【0019】
15は全体制御部で、検出された欠陥の座標、特徴量、画像などを記憶する記憶装置112、ユーザからの検査パラメータの変更を受け付けたり、検出された欠陥情報を表示したりするユーザインターフェース部113、各種制御を行うCPUで構成される。114は全体制御部からの制御指令に基づいてステージ12を駆動するメカニカルコントローラである。なお、図示していないが、画像処理部14、検出部13等も全体制御部15からの指令により駆動される。111は分類条件設定部であり、欠陥の特徴量に基づき欠陥クラスを決定する分類条件を設定する。
16はレビュー装置であり、検査装置には含まれないが、データの授受が可能なようになっている。
【0020】
次に、図1に示す検査装置による欠陥検出方法について説明する。
被検査物である半導体ウェハ11は、図2に示すように同一であるはずのパターンのダイ21が多数、規則的に並んでいる。隣接する2つのダイの同じ位置、例えば図2の領域22とそれに隣接するチップの領域23との間で画像を比較し、両者の間に差異がある部分を欠陥として検出する。
【0021】
その作用を説明すると、全体制御部15では、被検査物である半導体ウェハ11をステージ12により、例えば図2に示すスキャンAの方向と反対の方向へ連続的に移動させる。このステージ12の連続的な移動に同期して、検出部13のイメージセンサ104でスキャンAの方向に順次被検査物11の光学像が検出されて、チップの像が検出部13より取り込まれる。検出部13のイメージセンサ104は入力された信号を画像処理部14に出力する。画像処理部14では、まず入力されたアナログ信号をAD変換部105でデジタル信号に変換し、前処理部106にてシェーディング補正、暗レベル補正などを行う。
【0022】
欠陥判定部107では例えば、隣接する2つのダイの対応する領域の画像比較により、欠陥判定を行う。画像切出部108では、検出された欠陥の位置を中心として予め定められたサイズで検出画像を切出す。比較検査を行う場合の参照画像およびしきい値画像を切出すこともある。特徴抽出部109では、複数の欠陥候補各々について、切出した画像に基づいて欠陥のサイズを表す特徴量、欠陥の明るさを表す特徴量、欠陥の形状を表す特徴量、背景の情報を表す特徴量などの欠陥分類に用いる特徴量を算出する。
【0023】
欠陥分類部110では、予め分類条件設定部111で設定された条件を用いて分類を行い各欠陥のクラス情報を出力する。画像切出部108から出力される画像情報、特徴抽出部109から出力される欠陥の特徴量および欠陥分類部110から出力される欠陥クラス情報は、記憶装置112に保存される。また、ユーザインターフェース部113を介して、ユーザに提示される。
【0024】
欠陥分類部110および分類条件設定部111の関係を、図3を用いて詳細に説明する。図3は、画像処理部14と分類条件設定部111の間のデータの流れを示したものである。上記作用により、欠陥判定部107は欠陥の位置情報を出力する。画像切出部108は、欠陥の位置情報をもとに欠陥部の画像を切り出して出力する。特徴抽出部109は、欠陥部画像から特徴量を抽出して出力する。欠陥分類部110は特徴量に基づいて欠陥を分類し欠陥クラス情報を出力する。分類条件設定時には、レビュー装置16は欠陥の座標を元に、レビュー、分類を行い欠陥のクラスおよびレビュー画像を出力する。分類条件設定部111は特徴抽出部109から出力される欠陥の特徴量とレビュー装置16から出力される欠陥クラスを対応付けたものを教示データとし、別途入力される分類の優先順位に基づき分類条件を設定し、分類条件を出力する。
【0025】
次に、欠陥分類部110における動作について、図4ないし図7を用いて説明する。
図4は、欠陥分類部110の第一の構成例である。特徴変換部401と分類器402からなる。特徴変換部401は、特徴量を入力し、予め設定された特徴変換パラメータを用いて特徴変換する。ここで、特徴変換パラメータは、分類条件設定部111において、指定された分類の優先順位に基づいて、優先順位の高い分類を容易にするように設定されるものとする。線形変換の場合M×Nの行列で表される。ただしMは変換後の特徴次元数、Nはもとの特徴次元数である。
【0026】
分類器402は、変換後の特徴量を入力し、予め設定された分類条件に基づいて欠陥分類を行い、欠陥クラス情報を出力する。分類器402としては、教示型の分類器であればなんでもよい。例えば、最近傍法、最小距離法、部分空間法、決定木法、ファジーボーティング法、フレキシブルナイブベイズ法、ニューラルネットワーク、サポートベクターマシン(SVM)などによるものが考えられる。複数の分類器を実装しておき、選択使用可能なようにしておくとよい。分類器の種類によって学習に必要なパラメータが異なるので、それに応じた入力が可能なようにしておく。分類条件として設定するものも分類器の種類によって異なるため、対応するフォーマットを準備しておく。
【0027】
図5は、欠陥分類部110の第二の構成例である。複数の分類器402a〜402dを直列につなげた構成としている。一つ一つの分類器はあるクラスとその他のクラスを分類する2クラス分類器である。例えば分類器402aはクラスAとその他を分類する。その他と判定されたものは分類器402bに送られる。同様にクラスB、クラスCと順に判定していく。最後の分類器402dは残った2つのクラスDおよびEをそれぞれのクラスに分類するものである。分類器の種類は教示型であればどんなものでもよいが、2クラスの分類に適したものには、サポートベクターマシン(SVM)や線形判別法がある。
【0028】
図6は、欠陥分類部110の第三の構成例である。複数の分類器402e〜402gを並列につなげたものと統合判定部403からなる。各分類器は各欠陥クラスに対応しており、そのクラスの正解率が高くなるよう分類条件E〜Gを設定されるものとする。分類器402e〜402gは、分類条件E〜Gに従って分類を行い、暫定欠陥クラスE〜Gを出力する。統合判定部403は、暫定欠陥クラスE〜Gと予め設定された統合判定条件に基づいて欠陥クラスの判定を行う。
【0029】
図7は、欠陥分類部110の第四の構成例である。複数の分類器をツリー状につなげた構成としている。分類器402hは入力した特徴量と分類条件Hに基づいて大分類を行い、大分類コードを出力する。大分類コードの判定によって分類器402i〜402kのいずれかに送られる。分類器402i〜402kは、対応する分類条件I〜Jに基づいて、分類を行い欠陥クラス情報を出力する。ここで、図7は、先頭の分類器の下に3個の分類器をつないだ構成を示しているが、つなぐ分類器の数は2個以上であれば何個でもよい。
また、さらにその下に2個以上の分類器をつないでもよく、図示する構成に限定されないものとする。
【0030】
次に、分類条件設定部111における動作について説明する。分類条件設定部111は、教示データの入力、分類の優先順位指定、分類条件の自動設定、設定条件による分類評価結果の表示を行う。これらは、一つ前の処理が実行されていなければ、実行できないものとする。分類の優先順位指定とは、例えば、特定の欠陥についてアキュラシーあるいはピュリティが高くなることを全体の正解率より優先したい、というような要望を指定する機能である。
【0031】
欠陥分類部110が図4に示すように特徴変換部と分類器からなる場合について、図8ないし図14を用いて説明する。
図8は、分類条件設定部111において分類の優先順位を指定するためのGUIの第一の例である。優先順位指定ウィンドウ801では、優先順位に対応づけて欠陥クラス、アキュラシーまたはピュリティの選択、目標性能を指定する。欠陥クラスは欠陥クラス選択リスト802から選択して指定する。リストには、教示データに含まれる全種類のクラスコードおよびクラス名と“all”、“minimum”が含まれている。“all”は全欠陥の正解率、“minimum”は各クラスのアキュラシーまたはピュリティの最悪値とする。アキュラシー・ピュリティ選択リスト803によりどちらかを選択し、目標設定ウィンドウ804への数値入力により、目標性能を設定する。設定は基本的に優先順位の上位から順に行うため、設定済みの項目のすぐ下の欄にのみ新しい項目が入力できるようになっている。設定後に優先順位変更ボタン805a、805bを用いて優先順位を変更することができる。
“up”を押すとすぐ上の項目と入れ替わり、“down”を押すとすぐ下の項目と入れ替わる。新しい項目を挿入したい場合は、一番下の欄に入力したのち“up”ボタンにより挿入したい箇所に移動させる。OKボタン806押下により、入力された設定が記憶され、優先順位の指定を終了する。キャンセルボタン807の押下により、入力された設定は破棄され、終了する。
【0032】
図9は、上記で指定された分類の優先順位に基づいて、図4に示す、特徴変換と分類器からなる欠陥分類の条件設定のフローを表す図である。特徴変換は線形変換とし、分類に適した特徴軸を設定するための変換行列を求めることを目的とする。分類に適した特徴軸とは、同じクラスは近くにあり、異なるクラスは遠くにあるような軸のことである。このため、線形判別法では、クラス内分散・クラス間分散比最大基準で変換行列を求めている。
【0033】
本発明では、クラス毎に求めているクラス内分散とクラス間分散に優先順位を考慮して重みづけを施すことにより、優先順位つきの目標を達成することを考える。最初に、N=1とおき、重みを初期化する。均一な重みとすればよい(901)。次に、重みつきのクラス内共分散およびクラス間共分散を求める(902)。クラス毎のクラス内分散とクラス間分散を線形判別法と同様に求めた上で、重みをかけて和を計算する。クラス毎の計算は、非特許文献1記載のパラメトリックな手法、非特許文献2記載のノンパラメトリックな手法と同様の計算方法でもよい。
【0034】
次に、クラス内分散・クラス間分散比最大基準で変換行列を求める(903)。次に教示した特徴量データを変換行列を用いて変換する(904)。次に、分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ評価を行う(905)。評価方法は1個をテストサンプルとし、残りを教示サンプルとする評価を欠陥数分繰り返す、リーブワンアウト法(一つ抜き法ともいう)が望ましい。教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計した、コンフュージョンマトリクスを出力する。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、最も良い結果となるものを選んでもよい。このとき、分類器選択は全ての分類器から行ってもよいし、予め範囲を指定しておいてもよい。
【0035】
次に、優先順位N-1番目までの目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(906)。目標達成していない場合は終了であり、前回の結果を最終結果とする(912)。前回は優先順位N-1番目までの目標を達成しているはずである。優先順位N-1番目まで目標達成している場合は優先順位N番目の目標をチェックする(907)。目標達成している場合は、Nを1個加算する(908)。Nが目標数を超えた場合は(909)、終了する(910)。そうでない場合はステップ907に戻る。ステップ907で目標達成していない場合は対応するクラスの分類しやすさを向上させるため、重みづけの変更を行い(911)、ステップ902に戻る。重みの変更は、対応するクラスの重みを増し、その他のクラスの重みを減じるよう、例えば数1に従って行う。
【0036】
【数1】
【0037】
ここでCはクラス数、wiはクラスiに関連付けられた重みである。iは優先順位に合わせてソートされているものとする。αは変更量を制御するパラメータである。ここで、重みの変更方法は上記に限定されるものではなく、各クラスについて目標との乖離度、余裕度を加味して加減量の制御を行ってもよい。また、ここまでの重みの変化量とクラス別のピュリティ、アキュラシーの変化量の関係を記録しておき、変化量の比をもとに加減量の制御を行ってもよい。
【0038】
最終結果は、図8に示すGUIで優先順位をつけて指定された目標に対する達成度とともに表示される。図10は、目標達成度の評価を表示するGUIの例である。評価結果表示ウィンドウ1001には達成度評価結果表示ウィンドウ1002とコンフュージョンマトリクス1003が表示される。両者は同じ結果を異なる視点で表示したものである。
【0039】
達成度評価結果ウィンドウ1002には、優先順位順に欠陥クラス、アキュラシーまたはピュリティの選択、目標性能、性能評価結果、目標との差、判定を表示する。コンフュージョンマトリクス1003は教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計したものである。最右列にはアキュラシー、すなわち学習された分類条件による欠陥クラス別の正解率が表示される。最下段にはピュリティ、すなわち学習された分類条件によってある欠陥クラスに分類される欠陥のうちの、正しく分類された欠陥数の割合が表示される。右下コーナーには全体の正解率が表示される。
【0040】
目標性能を指定された項目について、アキュラシーの右あるいはピュリティの下に優先順位と判定を表示する。コンフュージョンマトリクスを表示することにより、どの欠陥クラスで誤りやすいかといった情報を得ることができる。評価結果に基づき、OKと判断した場合は登録ボタン1004押下により、最終的に得られた変換行列を用いて特徴変換を行い、最終的な分類器、パラメータを用い、教示データ全ての学習により分類条件を設定し、特徴変換行列とともに記憶装置112に登録して終了する。NGと判断した場合は終了ボタン1005押下により表示内容と最終的に得られた変換行列、最終的な分類器、パラメータを仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。これらのボタンにより、分類の優先順位指定を変更した場合にも、変更前後の違いを確認することができる。
【0041】
分類器の分類条件は分類器の種類によって異なる。例えば、最近傍法であれば、教示データの特徴変換後の特徴量と正解クラスをそのまま記憶しておく。最小距離法であれば、クラス毎の平均特徴量を計算しておく。
【0042】
分類の優先順位指定方法の別の例について図11ないし図13を用いて説明する。
図11は、分類条件設定部111において分類の優先順位を指定するためのGUIの第二の例である。欠陥クラスを階層的に定義することにより、お互いに誤分類すると困るグループと、誤分類しても影響の小さいグループを区別しようという考え方である。階層的分類コード指定ウィンドウ1101では、定義済みの欠陥クラスが欠陥クラスウィンドウ1102にリストアップされている。お互いに誤分類すると最も困るグループに異なる大分類コードを割り当て、大分類コードウィンドウ1103で設定する。
【0043】
大分類コードは、100、200、300、…と100単位の数から選べるようにしておく。図11の例では、致命欠陥であるA〜EがFのニューサンスに誤分類されることが最も困るという考えの下に大分類コードを決めている。ひとつの大分類コードに3個以上の欠陥クラスがある場合は、お互いに誤分類すると次に困るグループに異なる中分類コードを割り当て、中分類コードウィンドウ1104で設定する。
【0044】
中分類コードは百の位の数字を大分類コードと同じとし、10単位の数から選べるようにしておく。図11の例では発生原因が異なる異物とパターン欠陥と凹欠陥を異なるグループとして中分類コードを決めている。ウィンドウ1105〜1107は目標設定ウィンドウである。ウィンドウ1105には大分類間、ウィンドウ1106には中分類間、ウィンドウ1107には中分類より細かい分類の、分類正解率目標を設定する。目標値は大分類を対象とするときは高く、だんだん低くなるよう設定しなければならない。OKボタン1108押下により、入力された設定が記憶され、終了する。キャンセルボタン1109
の押下により、入力された設定は破棄され、終了する。
【0045】
上記で指定された階層的分類コードと階層別の目標に基づいて、図4に示す、特徴変換と分類器からなる欠陥分類の条件設定を行う方法について説明する。前述の方法と同様、特徴変換は線形変換とし、分類に適した特徴軸を設定するための変換行列を求めることを目的とする。クラス内分散・クラス間分散比最大基準で変換行列を求める過程において、クラス毎に求めているクラス内分散とクラス間分散に階層的分類を考慮して重みづけを施す。
【0046】
まず、クラス内分散については重み一定とする。次に、クラス間分散については、クラスの組合せを、大分類をまたぐもの、大分類は同じだが中分類をまたぐもの、同じ中分類のものにわけ、分類正解率目標に応じた重みをかけて計算する。クラス内分散・クラス間分散比最大基準で変換行列を求め、特徴量データを変換する。分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ一つ抜き評価を行う。階層ごとにコンフュージョンマトリクスを計算し、表示する。
【0047】
図12は、図11に示すGUIで階層毎に指定した目標に対する評価結果を表示するGUIの例である。評価結果表示ウィンドウ1201は、階層別分類コード表示ウィンドウ1202と階層別目標表示ウィンドウ1203とコンフュージョンマトリクス1204からなる。階層別分類コード表示ウィンドウ1202には、定義済みの欠陥クラスコード、欠陥クラス名、指定された大分類コードおよび中分類コードが表示されている。中分類コードが小さい順にソートされているものとする。
【0048】
A〜Eの記号は欠陥クラス毎に割り当てられており、コンフュージョンマトリクスとの対応付けがなされている。階層別目標表示ウィンドウ1203には、階層毎に設定した、分類正解率の目標が表示されている。コンフュージョンマトリクス1204は、教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計したものである。図に示すように、L1〜L3列にはアキュラシー、すなわち学習された分類条件による欠陥クラスまたは中分類コードまたは大分類コード別の正解率が表示される。L1は教示された欠陥クラス、L2は中分類コード、L3は大分類コードに対応している。
【0049】
L1〜L3段にはピュリティ、すなわち学習された分類条件によってある欠陥クラスまたは中分類コードまたは大分類コードに分類される欠陥のうちの、正しく分類された欠陥数の割合が表示される。L1〜L3列とL1〜L3段が交差する欄には全体の正解率が表示される。評価はまずL3列、L3段の数値と大分類の目標を比較する。図の例では目標を達成していることがわかる。
【0050】
次にL2列、L2段の数値と中分類の目標を比較する。図の例では、クラスDEのグループつまり中分類コード130のアキュラシー、ピュリティとも目標に達していないことがわかる。L1列、L1段の数値をその他の目標と比較すると、クラスEのアキュラシー、ピュリティが低いことがわかる。さらに詳細に調べると、クラスEの欠陥がクラスAに誤分類されることが多いことがわかる。
【0051】
このことから、クラスEとクラスAのクラス間分散の重みを増やして変換行列を算出すれば、目標を達成する方向に改善されると予想できる。重み変更ボタン1205押下により、図示はしないが重み変更ウィンドウが表示され、重みを変更することができる。変更後、再度特徴変換行列の計算が行われ、同様の処理を経て、評価結果表示ウィンドウ1201が表示される。改善の必要のない場合は、登録ボタン1206押下により、最終的に得られた変換行列を用いて特徴変換を行い、最終的な分類器、パラメータを用い、教示データ全ての学習により分類条件を設定し、特徴変換行列とともに記憶装置112に登録して終了する。目標を達成していないが改善を断念する場合は終了ボタン1207押下により何もしないで終了する。
【0052】
上記の重み変更を自動化することも考えられる。図13は、階層的分類コードと階層別の目標に基づいて、特徴変換行列を自動算出するためのフローを表す図である。最初に、クラスの組合せを、大分類が異なるもの、大分類は同じだが中分類が異なるもの、その他に分ける(1301)。次に、N=1とおき、階層別の目標に応じて重みを初期化する(1302)。次に、重みつきのクラス内共分散およびクラス間共分散を求める(1303)。クラス毎のクラス内分散とクラス間分散を線形判別法と同様に求めた上で、重みをかけて和を計算する。
【0053】
次に、クラス内分散・クラス間分散比最大基準で変換行列を求める(1304)。次に教示した特徴量データを変換行列を用いて変換する(1305)。次に、分類器選択および学習に必要なパラメータ設定を行った上で学習を実行させ、リーブワンアウト法で評価を行う(1306)。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、最も良い結果となるものを選んでもよい。
【0054】
図12に示すコンフュージョンマトリクスを計算しておく。次に、大分類の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1307)。OKならばN=2として(1308)、中分類の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1309)。OKならばN=3として(1310)、その他の目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1311)。
OKならば終了である(1314)。目標をすべて達成しているはずである。ステップ1307において目標達成していない場合、N>1ならば終了であり、前回の結果を最終結果とする(1315)。前回は大分類の目標を達成しているはずである。ステップ1309において目標達成していない場合、N>2ならば終了であり、前回の結果を最終結果とする(1315)。前回は中分類および大分類の目標を達成しているはずである。
【0055】
重みの変更により既に達成していた目標を達成できなくなった場合はもとに戻して、これ以上の重み変更を行わないということである。ステップ1307、1309、1311において、目標達成していないが上記に当てはまらない場合は、コンフュージョンマトリクスに基づいて、目標未達の要因となるクラスの組合せを見つける(1312)。例えば前述のクラスAとEである。目標未達の要因となるクラスの組合せのクラス間を分離させるため、重みづけの変更を行い(1313)、ステップ1303に戻る。重みづけの変更は、対応するクラスの組合せの重みを増し、その他の組合せの重みを減じるようにする。
【0056】
分類の優先順位指定方法の方法は上記の二例に限定されない。重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。アキュラシーとピュリティの目標を1個だけ定め、前者の場合は重要な欠陥クラスのうちアキュラシーおよびピュリティが低いものから目標を達成するよう学習するとよい。後者の場合は優先順に目標を達成するよう学習するとよい。
【0057】
以上により、特徴変換部401と分類器402からなる欠陥分類部110を有する欠陥分類装置において、ユーザが指定した分類の優先順位に基づいて、優先順位の高い分類の正解率を高くするよう、分類条件を設定することが可能となる。すなわち、第一の例によれば、重要な欠陥を見逃さないようにする、あるいは重要な欠陥のピュリティを高くするなどのニーズに応えることが可能となる。最低アキュラシーの目標を設定することにより、落ちこぼれをなくすことも可能となる。第二の例によれば、致命欠陥と非致命欠陥のように、誤分類したくない欠陥クラスの組合せについて、そのクラス間の誤分類を低減するなどのニーズに応えることが可能となる。
【0058】
以上の説明において、欠陥分類部の入力となる特徴量データは、特徴抽出部109の出力をそのまま使うこととしていたが、特徴量毎にx=(x-μ)/σの式により標準化しておくとよい。ここでxは特徴量の値、μは平均、σは標準偏差である。特徴量が非負の場合、1以下の0でない実数λを用いて特徴量の値をλ乗してスケールを変換してから標準化を行うと、正解率が向上する場合がある。また、特徴量間の比をとるなど、なんらかの演算を行って新しい特徴量を追加したものを用いてもよい。このような特徴量の変換、追加は、特徴抽出部109の内部で行うようにするとよい。
【0059】
以上の説明では、欠陥クラスの情報はレビュー装置16の出力としていたが、図3に示す構成において、欠陥判定部107から欠陥座標、画像切出部108から検査画像、レビュー装置16からレビュー画像を、分類条件設定部111に集めて、目視分類によって教示データを作成する構成としてもよい。
【0060】
図14は、分類条件設定部111において、検査画像およびレビュー画像を表示して目視分類するための欠陥教示GUIの例である。ウェハマップ表示ウィンドウ1401、ダイマップ表示ウィンドウ1402にはそれぞれウェハ上またはダイ上の欠陥位置を表すマップを表示される。検査画像表示ウィンドウ1403には、欠陥クラス毎に欠陥ID順に検査画像が表示される。全ての欠陥が重複なくいずれかのクラスまたは未分類の欄に表示される。画像のドラッグアンドドロップによって、対応する欠陥の欠陥クラスを教示することができる。検査情報詳細表示ウィンドウ1404には、選択された欠陥の検査装置による欠陥画像1405、参照画像1406、レビュー装置による欠陥画像1407、参照画像1408、特徴量一覧1409が表示される。欠陥の選択は、ウェハマップ上での欠陥点のクリック、ダイマップ上での欠陥点のクリック、検査画像表示ウィンドウ1403上での検査画像のクリックのいずれかによってなされる。この方法によれば、レビューしていない欠陥についても検査画像に基づいて欠陥クラスを教示することが可能である。判別できなければ、未分類の欄に残しておけばよい。したがって、教示サンプル数を増やすことができ、その結果正しい分類条件設定が可能となる。このように目視分類した結果は、クラス情報付特徴量データとして記憶装置112に記憶しておくとよい。
【0061】
次に、欠陥分類部110が図5に示すように複数の分類器を直列につなげた構成である場合の分類条件設定部111における動作について、図15を用いて説明する。
分類の優先順位の指定は、図8に示すGUIを用いて、クラス毎のピュリティおよびアキュラシーの目標を優先順位をつけて設定するものとする。上流の分類器から順に、優先順位の高い欠陥クラスを割り当て、割り当てたクラスを高い正解率で他のクラスから分類するよう学習することにより、分類条件を設定する構成とする。
【0062】
図15は、分類器を直列につなげた構成の欠陥分類の条件設定フローを表す。まず、欠陥クラスを設定した目標への登場順にリストアップする(1501)。欠陥クラス毎のピュリティおよびアキュラシーの目標は記録しておく。N=1とし(1502)、N番目の欠陥クラスと他のクラスを分類するN番目の分類器の分類条件を設定する(1503)。N=1のとき、図5の分類器402aがこれに相当する。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価する。ここで上流の分類器で誤分類してしまったものもアキュラシーの計算に含めることとする。アキュラシーが目標を達成したものの中から、ピュリティが最も高くなるものを選ぶとよい。ピュリティが低いと他の欠陥クラスのアキュラシー低下をまねくからである。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。残りの欠陥クラス数が1個ならば(1504)、終了する(1509)。N番目の分類器でその他のクラスに判定されたものは残りの1個の欠陥クラスと判定する。
【0063】
次に、教示データから、N番目の分類器でN番目のクラスに判定されたもの、つまり図5に示す分類器402から下向きに出て行くデータを除く(1505)。Nを1個加算する(1506)。ステップ1501で作成したリストに欠陥クラスが残っていれば(1507)、ステップ1503に戻る。残っていなければ、設定した目標に登場しない残りの欠陥クラスを分類するための最後の分類器の分類条件を設定する(1508)。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価する。全体正解率または最低アキュラシーが最も高いものを選択する。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。
【0064】
この場合も、重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。ピュリティおよびアキュラシーの目標を一個だけ決めることにより、上記と同様の処理が可能となる。
【0065】
図11に示す結果表示ウィンドウ1001を表示し、登録ボタン1004押下により、個々の分類器の分類条件を登録して終了、終了ボタン1005押下により、表示内容と最終的な分類器、パラメータと分類器の配置を仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。
【0066】
次に、欠陥分類部110が図6に示すように複数の分類器を並列につなげた構成である場合の分類条件設定部111における動作について、図16を用いて説明する。分類の優先順位の指定は、図8に示すGUIを用いて、クラス毎のピュリティおよびアキュラシーの目標を優先順位をつけて設定するものとする。統合判定部403は各分類器の結果の重み付投票により欠陥クラスを決定するものとする。すなわち、次式で算出されるクラスkの得票P(Ck)が最大となるkと決定する。
【0067】
【数2】
【0068】
ただし、Pi(Cj)は、i番目の分類器でクラスjと判定されれば1、その他と判定されれば0とする。クラス毎にそのクラスの正解率が高くなるようカスタマイズされた分類器の学習を行い、分類の優先順位に基づいて重みづけ係数wjk(i)を設定する構成とする。
【0069】
図16は、分類器を並列につなげた構成の欠陥分類の条件設定フローを表す。まず、欠陥クラス数分の分類器の分類条件を設定する(1601)。N番目の分類器では、N番目の欠陥クラスの正解率が高くなるようにする。例えば、分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価し、N番目の欠陥クラスのピュリティまたはアキュラシーの低い方が、最も高くなるものを選択するとよい。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。各分類器による教示データの判定結果を調べておく(1602)。その後、重みwjk(i)を設定する。まず、N=1とし、重みの初期設定を行う(1603)。j=kのとき1、そうでなければ0とする。あるいは、ステップ1601で得られるコンフュージョンマトリクスに基づいて、以下の通り計算する。
【0070】
【数3】
【0071】
分母は分類器iでクラスjと判定された欠陥数、分子はうち真のクラスがクラスkの欠陥数である。
【0072】
次に、全ての教示データについて、ステップ1602で算出した判定結果を用いて重み付投票を行い、統合判定を行う(1604)。教示した正解欠陥クラスに対して学習した分類条件でどの欠陥クラスに分類されるかを集計した、コンフュージョンマトリクスを出力する。
【0073】
次に、優先順位N-1番目までの目標をコンフュージョンマトリクスの対応する部分と比較してチェックする(1605)。目標達成していない場合は終了であり、前回の結果を最終結果とする(1611)。前回は優先順位N-1番目までの目標を達成しているはずである。優先順位N-1番目まで目標達成している場合は優先順位N番目の目標をチェックする(1606)。目標達成している場合は、Nを1個加算する(1607)。Nが目標数を超えた場合は(1608)、終了する(1609)。そうでない場合はステップ1606に戻る。
【0074】
ステップ1606で目標達成していない場合は対応するクラスの分類しやすさを向上させるため、重みづけの変更を行い(1610)、ステップ1603に戻る。重みづけの変更は、N番目の目標に関連するクラスをmとするとm番目の分類器に関連する重みwm*(*)を増し、その他の重みを減じるようにする。ここで、重みの変更方法は上記に限定されるものではなく、各クラスについて目標との乖離度、余裕度を加味して加減量の制御を行ってもよい。また、ここまでの重みの変化量とクラス別のピュリティ、アキュラシーの変化量の関係を記録しておき、変化量の比をもとに加減量の制御を行ってもよい。
【0075】
図11に示す結果表示ウィンドウ1001を表示し、登録ボタン1004押下により、個々の分類器の分類条件と統合判定条件を登録して終了、終了ボタン1005押下により、表示内容と最終的な分類器、パラメータと分類器の配置、統合判定における重みを仮登録して終了する。前回ボタン1006押下により、前回の仮登録データを表示する。表示中のデータが仮登録されていない場合は、仮登録を行う。前回ボタン1006押下により表示させた画面においては、次回ボタン1007押下により、次回の仮登録データを表示する。
【0076】
また、N番目の分類器はN番目の欠陥クラスとその他のクラスを分類する2クラス分類器としてもよい。その他クラスと判定された場合は、j≠iについてPi(Cj)=1/(M-1)(Mはクラス数)とおけば、上記と同様に処理できる。
また、欠陥クラス毎にカスタマイズするのではなく、異なる種類の分類器を全体の正解率あるいは最低アキュラシーが最も高くなるよう学習してもよい。統合の重み設定は上記と同様とする。
分類の優先順位の指定方法としては、重要な欠陥クラスかそうでないかを指定するだけでもよいし、欠陥クラスに順位をつけるだけでもよい。ピュリティおよびアキュラシーの目標を一個だけ決めることにより、上記と同様の処理が可能となる。
【0077】
次に、欠陥分類部110が図7に示すように複数の分類器をツリー状につなげた構成である場合の分類条件設定部111における動作について、図16を用いて説明する。
【0078】
分類の優先順位の指定は、図9に示すGUIを用いて、階層的分類コードと階層別目標を設定するものとする。初めに、大分類コードに従って分類する分類器の分類条件を設定する。図7の分類器402hに相当するものである。
【0079】
教示された特徴量データを用い、欠陥クラスを大分類コードに付け替えた上で、分類器の学習を行う。分類器選択およびパラメータ設定を網羅的あるいはランダムに行い、リーブワンアウト法で評価して、最も良い結果となるものを選ぶとよい。選択した分類器およびパラメータを用い全教示データによる学習を行い、分類条件を設定する。
【0080】
次に、各大分類コードについて以下を実施する。注目する大分類に2個以上の中分類コードが含まれる場合、中分類コードに従って分類する分類器を最初の分類器の下につなぎ、分類条件の設定を行う。最初の分類器によって注目する大分類に分類される教示データを抽出し、欠陥クラスを中分類コードに付け替えた上で分類器の学習を行う。注目する大分類に、中分類コードが1個しか含まれない場合、含まれる欠陥クラスの数により処理が異なる。欠陥クラスが1個の場合、注目する大分類と判定されたものは、その欠陥クラスであると判定する。欠陥クラスが2個以上の場合、それらを分類する分類器を最初の分類器の下につなぎ、分類条件を設定する。最初の分類器によって注目する大分類に分類される教示データを抽出し、分類器の学習を行う。最初の分類器の下につながる分類器は最大で大分類コードの数である。
【0081】
次に、各中分類コードについて、以下を実施する。注目する中分類に2個以上の欠陥クラスが含まれる場合、それらを分類する分類器を2段目の分類器の下につなぎ、分類条件の設定を行う。最初と2段目の分類器によって注目する中分類に分類される教示データを抽出し、分類器の学習を行う。注目する中分類に欠陥クラスが1個しか含まれない場合、注目する中分類と判定されるものはその欠陥クラスと判定する。
【0082】
図12に示す結果表示ウィンドウ1201を表示し、登録ボタン1206押下により、分類器の接続関係と個々の分類器の分類条件を登録して終了、終了ボタン1207押下により、何もしないで終了する。
【0083】
本発明の欠陥分類方法および装置は、本実施例における装置構成に限定するものではない。
例えば、検出系13を暗視野式あるいはSEM式とした場合にも同様の構成として、分類条件設定が可能である。また、暗視野光学系において、異なる角度から検出する検出光学系を設け、2センサまたはそれ以上で画像検出し、それぞれに欠陥検出、画像切り出し、特徴抽出して得られる特徴量データを、併せて用いて欠陥分類する構成としてもよい。2回またはそれ以上の検査を異なる光学条件で行い、検出された欠陥の座標突合せを行った上で、得られる特徴量データを併せて欠陥分類する構成としてもよい。あるいは、それぞれの検査条件で得られた特徴量データを用いて個別に分類条件を設定する構成としてもよい。
【0084】
検査実行時には、検査条件に対応する分類条件に従って分類を行い、欠陥クラスとともにその信頼度、例えばその欠陥クラスのピュリティなど(分類条件設定時に算出しておく)の情報を付加しておき、検出された各欠陥について、複数の検査で付加された欠陥クラスの多数決あるいは信頼度重み付多数決で欠陥クラスを決定する構成とする。
【0085】
また、これまで同一の形状となるパターンが形成されたウェハの比較による外観検査を例にとって説明してきたが、本発明の欠陥分類方法は、パターンなしウェハの欠陥分類にも適用可能である。パターンなしウェハの欠陥検出方式について説明する。回転ステージに保持されたウェハにレーザ光を照射し、ウェハ表面の散乱光を集光し、センサにより検出する。異なる角度に配置したセンサにより同様に散乱光を検出する。このような検出系は全方位をカバーするように構成するとよい。検出信号と予め設定されたしきい値を比較することにより、欠陥を検出する。複数の検出系のうち、一箇所でもしきい値を超えたものは欠陥として検出するようにする。欠陥の大きさ、形状によって強い散乱光が発生する方向が異なるため、複数の検出系で検出された信号の大きさと検出系間の比率を特徴量データとして、欠陥分類を行うことができる。抽出した特徴量データは、パターンつきウェハ検査装置の特徴量データと同様の処理が可能である。したがって、上記の方法で分類条件を設定することができる。
【0086】
本発明の欠陥分類方法は、さらに、ハードディスク基板、PDP、TFT、ホトマスク、フィルムなどの欠陥分類にも適用可能である。対象物に光または電子線を照射して、検出信号あるいは画像を取得し、信号処理または画像処理により正常からの逸脱を欠陥として検出する外観検査すべてに適用可能である。このような外観検査においては検出信号あるいは画像から、信号処理または画像処理により特徴量を算出することができ、算出した特徴量は上記説明と同様の処理を施すことができる。また、欠陥位置情報に基づき欠陥の高倍率の観察像を取得する、レビューにも適用可能である。
【実施例2】
【0087】
第一の実施例では、分類条件設定部において目標達成度を評価した後、設定した分類条件を採用(保存)するかどうかのみ、ユーザが判断していた。しかし、目標に到達しない場合に、妥協して採用するか、欠陥分類を断念するかの選択肢しかなく、ニーズに応えられないことも考えられる。第二の実施例では、ユーザに他の選択肢を提供することを考える。
【0088】
以下、本発明の第二の実施例を図17を用いて詳細に説明する。
実施例として、半導体ウェハを対象とした光学式外観検査装置を例にとる。図17は装置の構成の一例を示したものである。構成、動作とも第一の実施例とほぼ同じであるため、異なる部分を説明する。特徴切換部1701は、特徴抽出部109において算出する特徴量を指定する。特徴切換部1701を備えるのは、検査対象や光学条件によって分類に有効な特徴量が異なるためである。算出可能な特徴量全部を使用するのではなく、選択して使用することにより、分類に無関係な特徴量により分類性能が低下するのを防ぐとともに、特徴量の計算時間をセーブすることが可能となる。光学条件設定部1702は、全体制御部15によってコントロールされ、検出部13の調整により光学条件の変更を行う。明視野検出の場合、照明の強さ、波長、偏光、NA、検出側の偏光、NA、空間フィルタリング、倍率など、暗視野検出の場合、それらに加えてに照明の方位、仰角、検出の方位、仰角などが条件変更のパラメータとなる。
【0089】
動作について説明する。ある検査対象について初めて分類条件設定を行う場合は実施例1と同様の方法で分類条件設定を行う。ただし、欠陥位置情報とレビューによる正解クラス、検査画像、特徴量は対応付けて記憶装置112に保存しておく。指定した目標を達成できず、妥協あるいは目標を下げてやり直すなどの選択を望まない場合、ユーザの指定により、特徴切換えまたは光学条件変更を行った後、再度分類条件設定を行う。図10あるいは図12に示す評価結果表示用のGUIに、図示はしていないが、特徴量変更ボタンおよび光学条件変更ボタンを表示しておくとよい。
【0090】
特徴量変更ボタン押下により、特徴切換部1701は、特徴切換え用GUIを表示する。算出する特徴量のリストを複数表示し、どのリストを使用するかユーザに選択させる。
これまでに選択されていたリストの次のリストを自動的に選択して以降の処理に進んでもよい。
【0091】
また、複数のリストから自動的にランダムに選択して新しいリストを作成、登録し、これを選択してもよい。特徴量の切換えが終わると、特徴抽出部109は、記憶装置112から欠陥位置情報および欠陥画像を読み出す。選択した特徴量リストに従って特徴量の算出を行い、分類条件設定部111に転送する。
【0092】
あるいは、初回に算出可能な全ての特徴量を算出して記憶装置112に保存しておき、特徴量リストに従って特徴量を選択して分類条件設定部111に転送するようにしてもよい。
【0093】
分類条件設定部111は、レビューによる正解クラスを読み出して特徴量データと対応付ける。既に設定してある分類の優先順位に基づいて、実施例1と同様の方法で分類条件の設定を行う。目標を達成していれば、分類条件を登録するとよい。達成していなければ、妥協して登録するか、分類を断念して終了するか、特徴量または光学条件を変更して再度条件設定を行うか、の選択を行う。特徴切換え部において、3回目以降であれば、それまでの特徴量リストと目標達成度の関係を調べて、特徴量別の影響度を算出し、影響度の高いものを選択して新しいリストを作成、登録し、これを選択してもよい。
【0094】
光学条件変更ボタン押下により、光学条件設定用GUIが表示される。前述の光学条件を決めるパラメータそれぞれについて選択可能な状態をリストから選べるようにしておく。設定に従って光学条件を変更し、ステージ走査を行って、欠陥判定部107において欠陥判定を行う。ここで検出された欠陥と記憶装置112に保存された欠陥情報を用い、欠陥位置に基づいて突合せを行い、和集合を作成する。欠陥情報には、各光学条件で検出されたか否かの情報を付加しておく。画像切出部108は、和集合の欠陥位置情報に基づいて、検査画像を切出す。特徴抽出部109は検査画像から特徴量の算出を行う。分類条件設定部111は、算出された特徴量データとレビューによる正解クラスの対応付けを行う。
【0095】
図14に示すGUIを用いて、教示データを増やすとよい。もちろん、レビューによって教示データを増やしてもよい。その場合は、図14に示すGUIを用いて、検査画像による目視判定が難しいものを選択できるようにしておくとよい。分類条件設定部111は、既に設定してある分類の優先順位に基づいて、実施例1と同様の方法で分類条件の設定を行う。目標を達成していれば、分類条件を登録するとよい。達成していなければ、妥協して登録するか、分類を断念して終了するか、特徴量または光学条件を変更して再度条件設定を行うか、の選択を行う。
【0096】
ここで、光学条件のユーザの選択にまかせてもよいし、予め決められたルールに従って順に変更するのでもよい。タグチメソッドのような手法を用いて光学条件のパラメータセットを作成しておいて、順に実行し、目標達成度の推移から良いパラメータを選択し、その後、再度選択したパラメータを用いて検査を実行して特徴算出し、分類条件を設定してもよい。さらに、タグチメソッドのような手法を用いて複数の光学条件のパラメータセットを作成しておいて、順に検査を行って、検出欠陥の位置情報の突合せにより和集合を作成し、レビューを行って正解クラスを教示した後、同じ光学系条件で検査を行い、画像切出し、特徴抽出を行い、分類条件を設定し、目標達成度が最も高い光学条件を選んで分類条件を設定してもよい。または目標達成度に基づいて良いパラメータを選択し、その後、再度選択したパラメータを用いて検査を実行して特徴算出し、分類条件を設定してもよい。
【産業上の利用可能性】
【0097】
本発明は、半導体ウェハ、ハードディスク基板などの薄膜デバイス、PDP、TFTなどの薄型ディスプレイ、ホトマスク、フィルムなどを対象とした外観検査装置における、欠陥分類に適用可能である。
【符号の説明】
【0098】
11…被検査物(半導体ウェハ)、12…ステージ、13…検出部、14…画像処理部、15…制御部、16…レビュー装置、101…光源、102…照明光学系、103…対物レンズ、104…イメージセンサ、105…AD変換部、106…前処理部、107…欠陥判定部、108…画像切出部、109…特徴抽出部、110…欠陥分類部、111…分類条件設定部、112…記憶装置、113…ユーザインターフェース部、114…メカニカルコントローラ、401…特徴変換部、402…分類器、403…統合判定部、1701…特徴切換部、1702…光学条件設定部。
【特許請求の範囲】
【請求項1】
被検査基板上に光または電子線を照射して得られる検出信号によって前記被検査基板上に存在する欠陥を検出する欠陥検出ステップと、
検出された前記欠陥の特徴量を算出する特徴量算出ステップと、
算出された前記特徴量を用いて、前記欠陥を分類する欠陥分類ステップとを有し、
前記欠陥分類ステップは、前記特徴量と前記特徴量に基づいて決定された欠陥クラスとの対応関係が予め教示された特徴量データと、前記欠陥クラスの分類の優先順位を予め指定した優先度とに基づいて設定される欠陥の分類条件を用いて、前記欠陥の分類を行い、
前記優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類方法。
【請求項2】
前記欠陥分類ステップは、ツリー状に接続された分類器によって、前記欠陥クラスの分類を階層的に行う一連のステップと、からなり、
前記優先度の指定において、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件の設定において上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項1記載の欠陥分類方法。
【請求項3】
被検査基板を保持するステージと、
前記被検査基板上に光または電子線を照射して被検査基板の画像を検出する画像検出手段と、
検出された前記画像に基づいて前記被検査基板上に存在する欠陥を検出する欠陥検出手段と、
前記欠陥の画像に基づいて欠陥の特徴量を算出する特徴量算出手段と、
前記特徴量に基づいて欠陥を分類する欠陥分類手段と、
前記特徴量に欠陥クラスを対応付けて教示する教示手段と、
前記欠陥の分類の優先順位を指定する優先順位指定手段と、
前記特徴量と対応付けられた欠陥クラスの教示および分類の優先順位の指定に基づいて、前記欠陥の分類条件を設定する分類条件設定手段とを有し、
前記欠陥クラスの分類の優先順位を予め指定した優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類装置。
【請求項4】
前記欠陥分類手段は、前記欠陥クラスの分類を階層的に行うためのツリー状に接続された分類器からなり、
前記優先順位指定手段により、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件設定手段により、上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項3記載の欠陥分類装置。
【請求項5】
被検査基板を保持するステージと、
前記被検査基板上に光または電子線を照射して被検査基板の信号を検出する複数の信号検出手段と、
前記複数の信号検出手段による検出信号に基づいて欠陥を検出する欠陥検出手段と、
前記複数の信号検出手段による検出信号に基づいて欠陥部の特徴量を算出する特徴量算出手段と、
前記欠陥の特徴量に基づいて欠陥を分類する欠陥分類手段と、
前記欠陥の特徴量に欠陥クラスを対応付けて教示する教示手段と、
前記欠陥の分類の優先順位を指定する優先順位指定手段と、
前記欠陥の特徴量と対応付けられた欠陥クラスの教示および分類の優先順位の指定に基づいて、前記欠陥の分類の判別基準を設定する分類条件設定手段とを有し、
前記欠陥クラスの分類の優先順位を予め指定した優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類装置。
【請求項6】
前記欠陥分類手段は、前記欠陥クラスの分類を階層的に行うためのツリー状に接続された分類器からなり、
前記優先順位指定手段により、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件設定手段により、上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項5記載の欠陥分類装置。
【請求項1】
被検査基板上に光または電子線を照射して得られる検出信号によって前記被検査基板上に存在する欠陥を検出する欠陥検出ステップと、
検出された前記欠陥の特徴量を算出する特徴量算出ステップと、
算出された前記特徴量を用いて、前記欠陥を分類する欠陥分類ステップとを有し、
前記欠陥分類ステップは、前記特徴量と前記特徴量に基づいて決定された欠陥クラスとの対応関係が予め教示された特徴量データと、前記欠陥クラスの分類の優先順位を予め指定した優先度とに基づいて設定される欠陥の分類条件を用いて、前記欠陥の分類を行い、
前記優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類方法。
【請求項2】
前記欠陥分類ステップは、ツリー状に接続された分類器によって、前記欠陥クラスの分類を階層的に行う一連のステップと、からなり、
前記優先度の指定において、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件の設定において上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項1記載の欠陥分類方法。
【請求項3】
被検査基板を保持するステージと、
前記被検査基板上に光または電子線を照射して被検査基板の画像を検出する画像検出手段と、
検出された前記画像に基づいて前記被検査基板上に存在する欠陥を検出する欠陥検出手段と、
前記欠陥の画像に基づいて欠陥の特徴量を算出する特徴量算出手段と、
前記特徴量に基づいて欠陥を分類する欠陥分類手段と、
前記特徴量に欠陥クラスを対応付けて教示する教示手段と、
前記欠陥の分類の優先順位を指定する優先順位指定手段と、
前記特徴量と対応付けられた欠陥クラスの教示および分類の優先順位の指定に基づいて、前記欠陥の分類条件を設定する分類条件設定手段とを有し、
前記欠陥クラスの分類の優先順位を予め指定した優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類装置。
【請求項4】
前記欠陥分類手段は、前記欠陥クラスの分類を階層的に行うためのツリー状に接続された分類器からなり、
前記優先順位指定手段により、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件設定手段により、上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項3記載の欠陥分類装置。
【請求項5】
被検査基板を保持するステージと、
前記被検査基板上に光または電子線を照射して被検査基板の信号を検出する複数の信号検出手段と、
前記複数の信号検出手段による検出信号に基づいて欠陥を検出する欠陥検出手段と、
前記複数の信号検出手段による検出信号に基づいて欠陥部の特徴量を算出する特徴量算出手段と、
前記欠陥の特徴量に基づいて欠陥を分類する欠陥分類手段と、
前記欠陥の特徴量に欠陥クラスを対応付けて教示する教示手段と、
前記欠陥の分類の優先順位を指定する優先順位指定手段と、
前記欠陥の特徴量と対応付けられた欠陥クラスの教示および分類の優先順位の指定に基づいて、前記欠陥の分類の判別基準を設定する分類条件設定手段とを有し、
前記欠陥クラスの分類の優先順位を予め指定した優先度を用いて、前記欠陥クラスを階層的に分類する優先順位を指定し、
前記分類された階層毎に目標性能が指定されることを特徴とする欠陥分類装置。
【請求項6】
前記欠陥分類手段は、前記欠陥クラスの分類を階層的に行うためのツリー状に接続された分類器からなり、
前記優先順位指定手段により、前記欠陥クラスの階層的な分類と階層別の目標性能とを指定し、
前記分類条件設定手段により、上位の階層から順に前記欠陥クラスを分類するように分類器を接続し、前記階層別の目標性能を達成するよう前記分類器の分類条件を設定することを特徴とする請求項5記載の欠陥分類装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−181209(P2012−181209A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2012−134507(P2012−134507)
【出願日】平成24年6月14日(2012.6.14)
【分割の表示】特願2007−273894(P2007−273894)の分割
【原出願日】平成19年10月22日(2007.10.22)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成24年6月14日(2012.6.14)
【分割の表示】特願2007−273894(P2007−273894)の分割
【原出願日】平成19年10月22日(2007.10.22)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]