
欠陥検査方法及び欠陥検査装置
【課題】欠陥検査装置のレシピで設定するセル領域の設定を自動化する方法を提供する。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は半導体ウエハ,フォトマスク,磁気ディスク,液晶基板等の表面の異物,パターン欠陥を検出する欠陥検査装置及び欠陥検査方法に係り、特に検査領域を自動で決定する手段を備えた欠陥検査方法及び欠陥検査装置に関する。
【背景技術】
【0002】
半導体欠陥検査装置においてWafer(ウエハ,ウェハ)に発生した欠陥を検査するためには検査領域と検査条件などを設定したRecipe(レシピ)の作成が必要である。この場合、欠陥検査は自動で実行できるが、その自動検査を実行するためのRecipe作成は殆どが人間の手作業と判断が必要になるのが現在の技術レベルである。
【0003】
Recipe作成の中でも時間がかかって、検査装置になれていない人間に難しく感じられる作業がCell Matの設定である。欠陥検査装置で高感度で検査をするためには、Dieの中を周期性を持ったMemory Cell Mat AREAと非Memory Cell Mat Areaに分けてAreaごとに異なる検査方式と異なる検査感度を設定する必要がある。例えば、Memory Deviceの場合、DieはCell Area、Sens-Amp Area,SWD Area,Peri Areaなどに分類して、検査する時はCell Mat AreaはCell比較で、それ以外のAreaはDie比較で検査する方式が一般的に使われている。
【0004】
従来の技術ではこのような検査領域を分ける作業をCell Areaの構成単位であるCell Matと次のCell Matの距離を人間が手動で測って、そのCell Matの繰り返し特性を調べた後、人間の目で確認したCell Matの始端と終端をマウスでクリックしてそれを数分だけN倍にコピーする方法が使われていた。
【0005】
被検査対象物の画像の濃淡のヒストグラムを求め、ヒストグラムの分散の度合いにより、チップの外周エッジを判定する方法については例えば特許文献1に記載されたような方法が知られている。しかし、1つのチップ(Dieと言い換えても良い)の内部に設けられたCell Areaの識別は濃度の差が小さく、境界を判定する閾値の設定が難しいため、結局、人間が判定する方法に頼っていた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3219094号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述のように人間が手動でCell Matを設定すると大きく三つの問題が発生する。
【0008】
一つ目としては人間がマウスでクリックして設定することで検査領域の精度が落ちてしまい、Cell Edgeなどの細かいArea設定ができなくなってしまう。つまり最近の半導体製品ではCell MatのEdgeでの欠陥発生抑止が歩留まり向上の重要な要素であるが、その精度が確保できなくなることによってCellのEdgeの検査が不可能になってしまう問題があった。
【0009】
二つ目としては検査領域を設定するためには時間がかなりかかってしまい、Recipe作成時間が大幅に増える。
【0010】
三つ目としては手動で検査領域を設定するためには関連トレーニングを受けた技術者が必要となる。
【0011】
本発明の目的は、上記課題を解決した欠陥検査装置及び欠陥検査方法を提供することにある。
【課題を解決するための手段】
【0012】
前述のような課題を解決するためには人間の手動計算及び目で確認してマウスでクリックして指定する従来の方法では前述したようないろいろな問題が出てくる。その解決策として本発明では特定Cell Mat Areaで(Auto Threshold Search Area)スキャンを行って、そこからCell Matが始まるPixel(始点)とCell Matが終わるPixel(終点)を検出する基準になる閾値を求める。その後、同じAuto Threshold Search Areaを含めるWaferの中の特定1Dieのスキャンを行う。スキャンした結果はCell Pitch単位で比較を行ってAuto Threshold Search Areaで得た閾値を基準にしてCell Matの複数の始点と終点を取得する。
【0013】
Cell Matの始点と終点の検出はX方向とY方向で行って複数個検出する。その後、検出した始点と終点のそれぞれを繋げてCell Mat Areaを決定する。
【発明の効果】
【0014】
本発明によって、欠陥検査装置のRecipeで設定するCell Areaの設定が自動化できるようになって、かつ、正確に設定することができる。
【0015】
即ち、Cell Mat Area設定の自動化によって検査領域設定に熟練していなかった人間がRecipeを作成する時も簡単に、早く検査領域設定を作成することができる。しかもGray Level特性分析によって検査領域を設定するのでCell MatのEdgeまで正確に設定することができ、Cell Mat Edgeの検査まで可能になることである。また、Recipe作成にかかる時間と手間も大幅に短縮することが期待できる。
【図面の簡単な説明】
【0016】
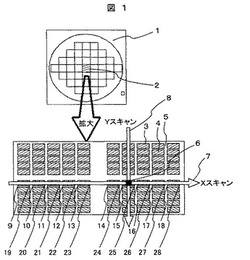
【図1】Waferの中にあるChipの中からでMemory Cell Areaを選んでX方向スキャンとY方向スキャンを行ってCell Matのそれぞれの始点と終点を検出する全体構成図。
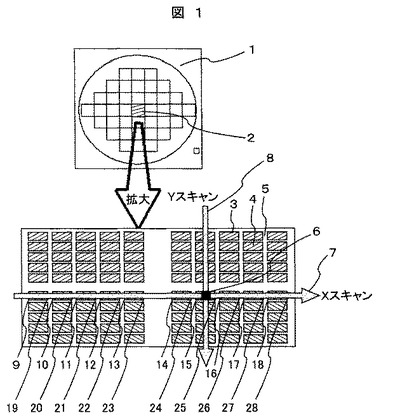
【図2】Cell Matのそれぞれの始点と終点を検出するために必要な閾値を求めるためのMemory Cell AreaのTDI像の例とそのTDI像のGray LevelをY軸にしてスキャンのX位置をX軸にして書いたグラフ。
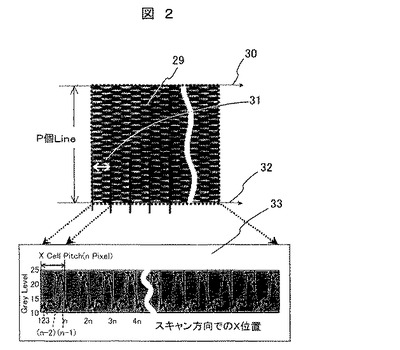
【図3】図2のTDI像の1Line分と下のグラフをCell Pitch単位で行列化した。合計m個のCell Pitchはn個のPixelに構成されて、行列の中で同じ順番どうしにある値で集合を作った図。
【図4】図3で作った集合の中で最大値のそれぞれを求めた図。
【図5】図4で作った集合の中で最小値のそれぞれを求めた図。
【図6】図4で求めた最大値と図5で求めた最小値を引いた値をCell_Thresholdに表した図。
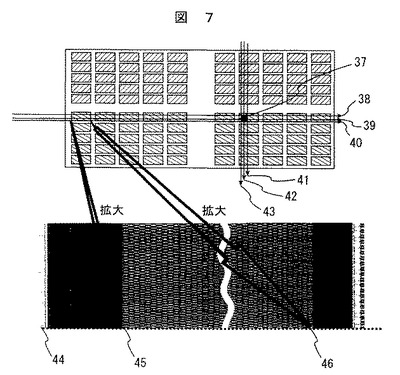
【図7】一つのDieで存在するDieのStart AreaとCellMatの始点と終点の実際のTDI像として表した図。
【発明を実施するための形態】
【0017】
本発明の全体構成を図1を用いて説明する。
【0018】
図1の1に示したのは半導体材料であるWaferである。このWaferにさまざまな半導体プロセスを流して最終的にはDie単位で切るとそれが一つの半導体チップになる。即ち、一般的に一つのチップといわれている基本単位が2に示したDieである。
【0019】
DRAMの場合、この一つのDieの中には数多くの素子(トランジスター)が作られてあって、一般的にはこの素子を集団で集めて配置させた最小単位の集団をCell Matと呼ぶ。図1の3に示したものがそのCell Matの一つである。図1に示したDieの中にはCell Matの25個が4集団あって、合計100個のCell Matが存在している。
【0020】
Cell Matを非Cell Matと正確に区別するためにはCell Areaの始点(図1の4,9〜18、及び図7の45)と終点(図1の5,19〜28及び図7の46)を区別する必要がある。
【0021】
図1の9〜18まではCell Matのそれぞれの始点を示して、19〜28まではCell Matのそれぞれの終点が示してある。このCell Matのそれぞれの始点と終点を7(Xスキャン)と8(YスキャンまたはXスキャン)のスキャン結果から検出する方法を以下に説明する。
【0022】
まず、それぞれの始点と終点を人間が決めるのではなく7と8のスキャンから得たデータ(Gray Level)から始点と終点を検出するため、始点と終点を検出するためのGray Levelの閾値が必要になる。この閾値を求めるAreaをAuto Threshold Search Areaと呼び、この指定だけを人間がMemory Cell Matを探して指定する。図1にはこのAuto Threshold Search Areaを6に示して、さらに6を拡大して図2の29に示した。
【0023】
スキャンから得た29のImageはDigital Imageでそれぞれの画素がGray Levelという0から255までの値をそれぞれ持っている。図2ではまず、29のAuto Threshold Search Areaで32の一番下のLineからGray Levelを取ってX Pixel位置に対するGray LevelをCell Pitch単位で行列にして図3に示したように並べる。このデータを集めてグラフと式に示したのが図2の33のグラフと図3の式である。ただ、33に示したグラフと図3に示した式は一つのCell Pitchではn個のPixelを持つという前提の上で書いてある。また図3の式ではn個のPixelで構成されたCell Pitchがm個存在することで行列を並べたものである。
【0024】
34では一つのCell Pitchを構成するそれぞれのPixelの中でCell Pitchの最初に位置したPixelのGray Levelだけを集めてGL_Matrix_1にした。また、35ではその次のPixelのそれぞれを集めてGL_Matrix_2にした。そしてこの定義を36のようにn個番目まで行うとn Pixel目はGL_Matrix_nになる。
【0025】
次に図4と図5に示したようにGL_Matrix_1の中で最大のGray Levelと最小のGray Levelを求めてGL_Matrix_Max(1)とGL_Matrix_Min(1)にする。また同じくGL_Matrix_Max(2),GL_Matrix_Max(3),,,,,, GL_MATRIX_MAX(N)及びGL_Matrix_Min(2),GL_Matrix_Min(3),,,,,, GL_Matrix_Min(n)までを求める。
【0026】
図6では図4と図5の式で求めたGL_Matrix_Max(1)からGL_Matrix_Min(1)を引いてCell_Threshold1にして同じくCell_Threshold2からCell_Thresholdnまでを求める。そして最後にn個のCell_Thresholdまでの中で最大値を計算してCell_Treshold_Line1に定義する。
【0027】
次に図2の32に示した一番下の1Lineの1Pixel上のLineのGray Levelを取ってさらに図3,図4,図5,図6を経て最終的にCell_Treshold_Line2を算出する。
【0028】
このように32番から30番までのY方向のP個のLineに対して同一計算を行うとCell_Treshold_Line1からCell_Treshold_LinePまでのCell_Tresholdを算出することが可能になる。このそれぞれのCell_Threshold_LineはCell Matの始点と終点を決めるそれぞれのLineの閾値として使われる。
【0029】
次に図1の6と図2の29に示したAuto Threshold Search Areaと同一のY方向の幅(P Pixel)を図1の7に示したように1Die分スキャンする。
【0030】
スキャンの目的は始点(9番から18番)と終点(19番から28番)を検出することにある。そのそれぞれの始点と終点を検出する方法を次に記述する。まず、X位置に対するGray levelデータをCell Pitch単位の行列にして1Die分取得する。取得した行列のデータからは図7の44のDie Start位置からCell Pitch単位にして引き算を行ってその計算結果の絶対値が該当LineのCell_Treshold_Lineに比べて大きいか小さいかを判定する。この判定での結果で始点と終点の候補を決定する。下記では具体的にその始点と終点の候補から本当の始点と終点を決める方法を説明する。
【0031】
まず、DieのStart PixelからCell Pitch間隔の行列単位で引き算を行ってその絶対値が閾値(Cell_Treshold_Line)を超えないPixelを探す。そしてそのPixelを含めた連続3PixelがCell_Thresholdを超えなかったらそのPixelを始点候補を現すS_Pixel_Candidateと定義する。そしてS_Pixel_Candidateが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えていない比較結果になった場合に、このPixelをS_Pixelに定義する。そして続けてCell Pitch間の比較を1Dieの最後まで比較すると複数のS_Pixelを探し出すことができる。これは以下の(1)乃至(4)のように表現することができる。
【0032】
(1)まず、DieのStart Pixelから、Cell MatのImage内のGray levelデータがCell Pitch単位で行列化されたもの同士をCell Pitch間隔で引き算を行う。そして、その引き算の差の絶対値が閾値(Cell_Treshold_Line)を超えないPixelを探す。
(2)そしてそのPixelを含めた連続3PixelがCell_Thresholdを超えなかったらそのPixelを始点候補を現すS_Pixel_Candidateと定義する。
(3)そして、S_Pixel_Candidateを得た引き算以降の引き算を行ったImageのPixelの90%が閾値(Cell_Treshold_Line)を超えていない場合に、このS_Pixel_CandidateをS_Pixelと定義する。
(4)そして続けてGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算、及び引き算の差の絶対値と閾値との比較を1Dieの最後まで比較すると複数のS_Pixelを探し出すことができる。
【0033】
S_Pixelを探し出す計算と同時にCell Matの最後を現すE_Pixelを探し出す計算も行う。即ち、Dieの44番のStart PixelからCell Pitch間の比較を続けて行っていくと閾値を超えるPixelを探しだすことができる。そしてそのPixelを含めて連続3PixelがCell_Thresholdを超えたらそのPixelを終点候補を現すE_Pixel_Candidateと定義する。その後、E_Pixel_Candidateが含まれたCell Pitchの次のCell Pitchの比較結果のPixelの90%が閾値を超えたらE_Pixelに定義して1Dieの最後までのCell Pitch比較で複数のE_Pixelを探し出す。これは以下の(5)乃至(8)のように表現することができる。
【0034】
(5)Dieの44番のStart PixelからGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算を続けて行っていくと、閾値を超えるPixelを探しだすことができる。
(6)そしてそのPixelを含めて連続3PixelがCell_Thresholdを超えたらそのPixelを終点候補を現すE_Pixel_Candidateと定義する。
(7)その後、E_Pixel_Candidateを得た引き算以降の引き算を行ったImageのPixelの90%が閾値を超えたらE_Pixelに定義する。
(8)そして続けてGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算、及び引き算の差の絶対値と閾値との比較を1Dieの最後まで比較すると複数のE_Pixelを探し出すことができる。
【0035】
ただ、S_Pixelが検出される前にE_Pixelが先に検出されるとS_Pixel検出ループに戻って閾値(Cell_Treshold_Line)を超えない連続3Pixelの条件に合ったS_Pixelが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えない条件を10%ずつさげてS_Pixelを検出する。
【0036】
つまり、S_Pixelが検出される前にE_Pixelが先に検出される場合もあるから、その場合は、前述したS_Pixel検出ループに戻り、90%とした条件を80%として、S_Pixelを検出する。それでも、S_Pixelが検出されないのであれば、80%とした条件を70%としてS_Pixelを検出する。S_Pixelが検出できるまで10%毎の条件の引き下げは行われるということである。
【0037】
また同じくS_Pixelの次にE_Pixelが検出されなくて続けてS_Pixelが現れた場合はE_Pixel検出ループに戻って閾値(Cell_Treshold_Line1)を超える連続3Pixelの条件に合ったE_Pixelが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えるべき条件を10%ずつさげてE_Pixelを検出する。
【0038】
つまり、S_Pixelの次にE_Pixelが検出されずに、続けてS_Pixelが現れる場合もあるから、その場合は、前述したE_Pixel検出ループに戻り、90%とした条件を80%として、E_Pixelを検出する。それでも、E_Pixelが検出されないのであれば、80%とした条件を70%としてE_Pixelを検出する。E_Pixelが検出できるまで10%毎の条件の引き下げは行われるということである。
【0039】
ここまでの方法でそれぞれのLineでそれぞれのCell_Treshold_Lineを適用してX方向のそれぞれの始点とそれぞれの終点を探すことができた。即ち、図1の7のスキャンからもしP個Line分の計算をした場合はP個Lineごとに10個の始点(S_Pixel_1〜S_Pixel_10)と10個の終点(E_Pixel_1〜E_Pixel_10)が検出できる。
【0040】
次は求められたP個Lineから得たS_Pixel_1がPixelの位置が最も一致するX位置を最終的にS_Pixel_1に決定する。また他の始点と終点についても同じく最も一致するX位置を最終的にS_PixelとE_Pixelに定義する。
【0041】
次にはY方向でのCell Matの始点と終点を算出するため8に示したように部分的なXスキャン、またはYスキャンを行う。ここでスキャンから得たImageを90度回してX方向の始点と終点を決めた方法と同じ方法でY方向の始点と終点を算出する。
【0042】
最終的に算出されたXY方向の始点と終点を繋げてS_PixelとE_Pixelの間をCell Matに定義する。
【0043】
このような方法により、Cell Matの始点と終点を定め、Cellの種類により異なる検査方法,検査条件を適用することにより、より正確な欠陥検査を実行できる欠陥検査装置が実現できる。
【符号の説明】
【0044】
1…Wafer、2…Die、3…Cell Mat、4…Cell Matの始点、5…Cell Matの終点、6…Auto Threshold Search Area、7…Xスキャン、8…Yスキャン、9〜18…Cell Matの始点、19〜28…Cell Matの終点、29…Auto Threshold Search AreaのTDI Image、30…PLine目のスキャン、31…一つのCell Pitch、32…1Line目のスキャン、33…1Line目のスキャン結果のGray Levelのグラフ、34…m個のCell Pitch(n個のPixelに構成)を構成する最初のPixelのそれぞれを集めた集合をGL_Matrix_1の式にあらわした図、35…m個のCell Pitch(n個のPixelに構成)を構成する2番目のPixelのそれぞれを集めた集合をGL_Matrix_2の式にあらわした図、36…m個のCell Pitch(n個のPixelに構成)を構成するn個目のPixelのそれぞれを集めた集合をGL_Matrix_nの式にあらわした図、37…Auto Threshold Search Area、38…1Die分スキャン時のP番目のLineのXスキャン、39…1Die分スキャン時の下から2番目のLineのXスキャン、40…1Die分スキャン時の一番下のLineのXスキャン、41〜43…1Die分スキャン時のY方向のスキャン、44…TDI像で表した一つのDieのStart Pixel、45…TDI像で表したCell Matの始点、46…TDI像で表したCell Matの終点。
【技術分野】
【0001】
本発明は半導体ウエハ,フォトマスク,磁気ディスク,液晶基板等の表面の異物,パターン欠陥を検出する欠陥検査装置及び欠陥検査方法に係り、特に検査領域を自動で決定する手段を備えた欠陥検査方法及び欠陥検査装置に関する。
【背景技術】
【0002】
半導体欠陥検査装置においてWafer(ウエハ,ウェハ)に発生した欠陥を検査するためには検査領域と検査条件などを設定したRecipe(レシピ)の作成が必要である。この場合、欠陥検査は自動で実行できるが、その自動検査を実行するためのRecipe作成は殆どが人間の手作業と判断が必要になるのが現在の技術レベルである。
【0003】
Recipe作成の中でも時間がかかって、検査装置になれていない人間に難しく感じられる作業がCell Matの設定である。欠陥検査装置で高感度で検査をするためには、Dieの中を周期性を持ったMemory Cell Mat AREAと非Memory Cell Mat Areaに分けてAreaごとに異なる検査方式と異なる検査感度を設定する必要がある。例えば、Memory Deviceの場合、DieはCell Area、Sens-Amp Area,SWD Area,Peri Areaなどに分類して、検査する時はCell Mat AreaはCell比較で、それ以外のAreaはDie比較で検査する方式が一般的に使われている。
【0004】
従来の技術ではこのような検査領域を分ける作業をCell Areaの構成単位であるCell Matと次のCell Matの距離を人間が手動で測って、そのCell Matの繰り返し特性を調べた後、人間の目で確認したCell Matの始端と終端をマウスでクリックしてそれを数分だけN倍にコピーする方法が使われていた。
【0005】
被検査対象物の画像の濃淡のヒストグラムを求め、ヒストグラムの分散の度合いにより、チップの外周エッジを判定する方法については例えば特許文献1に記載されたような方法が知られている。しかし、1つのチップ(Dieと言い換えても良い)の内部に設けられたCell Areaの識別は濃度の差が小さく、境界を判定する閾値の設定が難しいため、結局、人間が判定する方法に頼っていた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3219094号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述のように人間が手動でCell Matを設定すると大きく三つの問題が発生する。
【0008】
一つ目としては人間がマウスでクリックして設定することで検査領域の精度が落ちてしまい、Cell Edgeなどの細かいArea設定ができなくなってしまう。つまり最近の半導体製品ではCell MatのEdgeでの欠陥発生抑止が歩留まり向上の重要な要素であるが、その精度が確保できなくなることによってCellのEdgeの検査が不可能になってしまう問題があった。
【0009】
二つ目としては検査領域を設定するためには時間がかなりかかってしまい、Recipe作成時間が大幅に増える。
【0010】
三つ目としては手動で検査領域を設定するためには関連トレーニングを受けた技術者が必要となる。
【0011】
本発明の目的は、上記課題を解決した欠陥検査装置及び欠陥検査方法を提供することにある。
【課題を解決するための手段】
【0012】
前述のような課題を解決するためには人間の手動計算及び目で確認してマウスでクリックして指定する従来の方法では前述したようないろいろな問題が出てくる。その解決策として本発明では特定Cell Mat Areaで(Auto Threshold Search Area)スキャンを行って、そこからCell Matが始まるPixel(始点)とCell Matが終わるPixel(終点)を検出する基準になる閾値を求める。その後、同じAuto Threshold Search Areaを含めるWaferの中の特定1Dieのスキャンを行う。スキャンした結果はCell Pitch単位で比較を行ってAuto Threshold Search Areaで得た閾値を基準にしてCell Matの複数の始点と終点を取得する。
【0013】
Cell Matの始点と終点の検出はX方向とY方向で行って複数個検出する。その後、検出した始点と終点のそれぞれを繋げてCell Mat Areaを決定する。
【発明の効果】
【0014】
本発明によって、欠陥検査装置のRecipeで設定するCell Areaの設定が自動化できるようになって、かつ、正確に設定することができる。
【0015】
即ち、Cell Mat Area設定の自動化によって検査領域設定に熟練していなかった人間がRecipeを作成する時も簡単に、早く検査領域設定を作成することができる。しかもGray Level特性分析によって検査領域を設定するのでCell MatのEdgeまで正確に設定することができ、Cell Mat Edgeの検査まで可能になることである。また、Recipe作成にかかる時間と手間も大幅に短縮することが期待できる。
【図面の簡単な説明】
【0016】
【図1】Waferの中にあるChipの中からでMemory Cell Areaを選んでX方向スキャンとY方向スキャンを行ってCell Matのそれぞれの始点と終点を検出する全体構成図。
【図2】Cell Matのそれぞれの始点と終点を検出するために必要な閾値を求めるためのMemory Cell AreaのTDI像の例とそのTDI像のGray LevelをY軸にしてスキャンのX位置をX軸にして書いたグラフ。
【図3】図2のTDI像の1Line分と下のグラフをCell Pitch単位で行列化した。合計m個のCell Pitchはn個のPixelに構成されて、行列の中で同じ順番どうしにある値で集合を作った図。
【図4】図3で作った集合の中で最大値のそれぞれを求めた図。
【図5】図4で作った集合の中で最小値のそれぞれを求めた図。
【図6】図4で求めた最大値と図5で求めた最小値を引いた値をCell_Thresholdに表した図。
【図7】一つのDieで存在するDieのStart AreaとCellMatの始点と終点の実際のTDI像として表した図。
【発明を実施するための形態】
【0017】
本発明の全体構成を図1を用いて説明する。
【0018】
図1の1に示したのは半導体材料であるWaferである。このWaferにさまざまな半導体プロセスを流して最終的にはDie単位で切るとそれが一つの半導体チップになる。即ち、一般的に一つのチップといわれている基本単位が2に示したDieである。
【0019】
DRAMの場合、この一つのDieの中には数多くの素子(トランジスター)が作られてあって、一般的にはこの素子を集団で集めて配置させた最小単位の集団をCell Matと呼ぶ。図1の3に示したものがそのCell Matの一つである。図1に示したDieの中にはCell Matの25個が4集団あって、合計100個のCell Matが存在している。
【0020】
Cell Matを非Cell Matと正確に区別するためにはCell Areaの始点(図1の4,9〜18、及び図7の45)と終点(図1の5,19〜28及び図7の46)を区別する必要がある。
【0021】
図1の9〜18まではCell Matのそれぞれの始点を示して、19〜28まではCell Matのそれぞれの終点が示してある。このCell Matのそれぞれの始点と終点を7(Xスキャン)と8(YスキャンまたはXスキャン)のスキャン結果から検出する方法を以下に説明する。
【0022】
まず、それぞれの始点と終点を人間が決めるのではなく7と8のスキャンから得たデータ(Gray Level)から始点と終点を検出するため、始点と終点を検出するためのGray Levelの閾値が必要になる。この閾値を求めるAreaをAuto Threshold Search Areaと呼び、この指定だけを人間がMemory Cell Matを探して指定する。図1にはこのAuto Threshold Search Areaを6に示して、さらに6を拡大して図2の29に示した。
【0023】
スキャンから得た29のImageはDigital Imageでそれぞれの画素がGray Levelという0から255までの値をそれぞれ持っている。図2ではまず、29のAuto Threshold Search Areaで32の一番下のLineからGray Levelを取ってX Pixel位置に対するGray LevelをCell Pitch単位で行列にして図3に示したように並べる。このデータを集めてグラフと式に示したのが図2の33のグラフと図3の式である。ただ、33に示したグラフと図3に示した式は一つのCell Pitchではn個のPixelを持つという前提の上で書いてある。また図3の式ではn個のPixelで構成されたCell Pitchがm個存在することで行列を並べたものである。
【0024】
34では一つのCell Pitchを構成するそれぞれのPixelの中でCell Pitchの最初に位置したPixelのGray Levelだけを集めてGL_Matrix_1にした。また、35ではその次のPixelのそれぞれを集めてGL_Matrix_2にした。そしてこの定義を36のようにn個番目まで行うとn Pixel目はGL_Matrix_nになる。
【0025】
次に図4と図5に示したようにGL_Matrix_1の中で最大のGray Levelと最小のGray Levelを求めてGL_Matrix_Max(1)とGL_Matrix_Min(1)にする。また同じくGL_Matrix_Max(2),GL_Matrix_Max(3),,,,,, GL_MATRIX_MAX(N)及びGL_Matrix_Min(2),GL_Matrix_Min(3),,,,,, GL_Matrix_Min(n)までを求める。
【0026】
図6では図4と図5の式で求めたGL_Matrix_Max(1)からGL_Matrix_Min(1)を引いてCell_Threshold1にして同じくCell_Threshold2からCell_Thresholdnまでを求める。そして最後にn個のCell_Thresholdまでの中で最大値を計算してCell_Treshold_Line1に定義する。
【0027】
次に図2の32に示した一番下の1Lineの1Pixel上のLineのGray Levelを取ってさらに図3,図4,図5,図6を経て最終的にCell_Treshold_Line2を算出する。
【0028】
このように32番から30番までのY方向のP個のLineに対して同一計算を行うとCell_Treshold_Line1からCell_Treshold_LinePまでのCell_Tresholdを算出することが可能になる。このそれぞれのCell_Threshold_LineはCell Matの始点と終点を決めるそれぞれのLineの閾値として使われる。
【0029】
次に図1の6と図2の29に示したAuto Threshold Search Areaと同一のY方向の幅(P Pixel)を図1の7に示したように1Die分スキャンする。
【0030】
スキャンの目的は始点(9番から18番)と終点(19番から28番)を検出することにある。そのそれぞれの始点と終点を検出する方法を次に記述する。まず、X位置に対するGray levelデータをCell Pitch単位の行列にして1Die分取得する。取得した行列のデータからは図7の44のDie Start位置からCell Pitch単位にして引き算を行ってその計算結果の絶対値が該当LineのCell_Treshold_Lineに比べて大きいか小さいかを判定する。この判定での結果で始点と終点の候補を決定する。下記では具体的にその始点と終点の候補から本当の始点と終点を決める方法を説明する。
【0031】
まず、DieのStart PixelからCell Pitch間隔の行列単位で引き算を行ってその絶対値が閾値(Cell_Treshold_Line)を超えないPixelを探す。そしてそのPixelを含めた連続3PixelがCell_Thresholdを超えなかったらそのPixelを始点候補を現すS_Pixel_Candidateと定義する。そしてS_Pixel_Candidateが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えていない比較結果になった場合に、このPixelをS_Pixelに定義する。そして続けてCell Pitch間の比較を1Dieの最後まで比較すると複数のS_Pixelを探し出すことができる。これは以下の(1)乃至(4)のように表現することができる。
【0032】
(1)まず、DieのStart Pixelから、Cell MatのImage内のGray levelデータがCell Pitch単位で行列化されたもの同士をCell Pitch間隔で引き算を行う。そして、その引き算の差の絶対値が閾値(Cell_Treshold_Line)を超えないPixelを探す。
(2)そしてそのPixelを含めた連続3PixelがCell_Thresholdを超えなかったらそのPixelを始点候補を現すS_Pixel_Candidateと定義する。
(3)そして、S_Pixel_Candidateを得た引き算以降の引き算を行ったImageのPixelの90%が閾値(Cell_Treshold_Line)を超えていない場合に、このS_Pixel_CandidateをS_Pixelと定義する。
(4)そして続けてGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算、及び引き算の差の絶対値と閾値との比較を1Dieの最後まで比較すると複数のS_Pixelを探し出すことができる。
【0033】
S_Pixelを探し出す計算と同時にCell Matの最後を現すE_Pixelを探し出す計算も行う。即ち、Dieの44番のStart PixelからCell Pitch間の比較を続けて行っていくと閾値を超えるPixelを探しだすことができる。そしてそのPixelを含めて連続3PixelがCell_Thresholdを超えたらそのPixelを終点候補を現すE_Pixel_Candidateと定義する。その後、E_Pixel_Candidateが含まれたCell Pitchの次のCell Pitchの比較結果のPixelの90%が閾値を超えたらE_Pixelに定義して1Dieの最後までのCell Pitch比較で複数のE_Pixelを探し出す。これは以下の(5)乃至(8)のように表現することができる。
【0034】
(5)Dieの44番のStart PixelからGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算を続けて行っていくと、閾値を超えるPixelを探しだすことができる。
(6)そしてそのPixelを含めて連続3PixelがCell_Thresholdを超えたらそのPixelを終点候補を現すE_Pixel_Candidateと定義する。
(7)その後、E_Pixel_Candidateを得た引き算以降の引き算を行ったImageのPixelの90%が閾値を超えたらE_Pixelに定義する。
(8)そして続けてGray levelデータがCell Pitch単位で行列化されたもの同士のCell Pitch間隔での引き算、及び引き算の差の絶対値と閾値との比較を1Dieの最後まで比較すると複数のE_Pixelを探し出すことができる。
【0035】
ただ、S_Pixelが検出される前にE_Pixelが先に検出されるとS_Pixel検出ループに戻って閾値(Cell_Treshold_Line)を超えない連続3Pixelの条件に合ったS_Pixelが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えない条件を10%ずつさげてS_Pixelを検出する。
【0036】
つまり、S_Pixelが検出される前にE_Pixelが先に検出される場合もあるから、その場合は、前述したS_Pixel検出ループに戻り、90%とした条件を80%として、S_Pixelを検出する。それでも、S_Pixelが検出されないのであれば、80%とした条件を70%としてS_Pixelを検出する。S_Pixelが検出できるまで10%毎の条件の引き下げは行われるということである。
【0037】
また同じくS_Pixelの次にE_Pixelが検出されなくて続けてS_Pixelが現れた場合はE_Pixel検出ループに戻って閾値(Cell_Treshold_Line1)を超える連続3Pixelの条件に合ったE_Pixelが含まれたCell Pitchの次のCell Pitch比較結果のPixelの90%が閾値を超えるべき条件を10%ずつさげてE_Pixelを検出する。
【0038】
つまり、S_Pixelの次にE_Pixelが検出されずに、続けてS_Pixelが現れる場合もあるから、その場合は、前述したE_Pixel検出ループに戻り、90%とした条件を80%として、E_Pixelを検出する。それでも、E_Pixelが検出されないのであれば、80%とした条件を70%としてE_Pixelを検出する。E_Pixelが検出できるまで10%毎の条件の引き下げは行われるということである。
【0039】
ここまでの方法でそれぞれのLineでそれぞれのCell_Treshold_Lineを適用してX方向のそれぞれの始点とそれぞれの終点を探すことができた。即ち、図1の7のスキャンからもしP個Line分の計算をした場合はP個Lineごとに10個の始点(S_Pixel_1〜S_Pixel_10)と10個の終点(E_Pixel_1〜E_Pixel_10)が検出できる。
【0040】
次は求められたP個Lineから得たS_Pixel_1がPixelの位置が最も一致するX位置を最終的にS_Pixel_1に決定する。また他の始点と終点についても同じく最も一致するX位置を最終的にS_PixelとE_Pixelに定義する。
【0041】
次にはY方向でのCell Matの始点と終点を算出するため8に示したように部分的なXスキャン、またはYスキャンを行う。ここでスキャンから得たImageを90度回してX方向の始点と終点を決めた方法と同じ方法でY方向の始点と終点を算出する。
【0042】
最終的に算出されたXY方向の始点と終点を繋げてS_PixelとE_Pixelの間をCell Matに定義する。
【0043】
このような方法により、Cell Matの始点と終点を定め、Cellの種類により異なる検査方法,検査条件を適用することにより、より正確な欠陥検査を実行できる欠陥検査装置が実現できる。
【符号の説明】
【0044】
1…Wafer、2…Die、3…Cell Mat、4…Cell Matの始点、5…Cell Matの終点、6…Auto Threshold Search Area、7…Xスキャン、8…Yスキャン、9〜18…Cell Matの始点、19〜28…Cell Matの終点、29…Auto Threshold Search AreaのTDI Image、30…PLine目のスキャン、31…一つのCell Pitch、32…1Line目のスキャン、33…1Line目のスキャン結果のGray Levelのグラフ、34…m個のCell Pitch(n個のPixelに構成)を構成する最初のPixelのそれぞれを集めた集合をGL_Matrix_1の式にあらわした図、35…m個のCell Pitch(n個のPixelに構成)を構成する2番目のPixelのそれぞれを集めた集合をGL_Matrix_2の式にあらわした図、36…m個のCell Pitch(n個のPixelに構成)を構成するn個目のPixelのそれぞれを集めた集合をGL_Matrix_nの式にあらわした図、37…Auto Threshold Search Area、38…1Die分スキャン時のP番目のLineのXスキャン、39…1Die分スキャン時の下から2番目のLineのXスキャン、40…1Die分スキャン時の一番下のLineのXスキャン、41〜43…1Die分スキャン時のY方向のスキャン、44…TDI像で表した一つのDieのStart Pixel、45…TDI像で表したCell Matの始点、46…TDI像で表したCell Matの終点。
【特許請求の範囲】
【請求項1】
欠陥検査装置において、
複数の素子を集めて配置することで形成された集団の画像を得て、前記画像のグレイレベルを所定の間隔に区切り、区切られたグレイレベル同士について前記所定の間隔毎に引き算を行い、前記引き算の結果の絶対値と閾値とを比較することで前記集団の始点、及び終点のうち少なくとも1つの位置を得る処理部を有することを特徴とする欠陥検査装置。
【請求項2】
請求項1に記載の欠陥検査装置において、
前記処理部は、
前記絶対値が前記閾値以下であり、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値以下であった場合は、前記絶対値を有する画素を前記始点の候補とすることを特徴とする欠陥検査装置。
【請求項3】
請求項2に記載の欠陥検査装置において、
前記処理部は、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合以下であれば前記始点の候補を前記始点と認識することを特徴とする検査装置。
【請求項4】
請求項1に記載の欠陥検査装置において、
前記処理部は、
前記絶対値が前記閾値より大きく、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値より大きかった場合は、前記絶対値を有する画素を前記終点の候補とすることを特徴とする欠陥検査装置。
【請求項5】
請求項4に記載の欠陥検査装置において、
前記処理部は、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合より大きければ前記終点の候補を前記終点と認識することを特徴とする検査装置。
【請求項6】
欠陥検査の検査条件設定方法において、
複数の素子を集めて配置することで形成された集団の画像を得て、
前記画像のグレイレベルを所定の間隔に区切り、
区切られたグレイレベル同士について前記所定の間隔毎に引き算を行い、
前記引き算の結果の絶対値と閾値とを比較することで前記集団の始点、及び終点のうち少なくとも1つの位置を得ることを特徴とする検査条件設定方法。
【請求項7】
請求項6に記載の検査条件設定方法において、
前記絶対値が前記閾値以下であり、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値以下であった場合は、前記絶対値を有する画素を前記始点の候補とすることを特徴とする検査条件設定方法。
【請求項8】
請求項7に記載の検査条件設定方法であって、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合以下であれば前記始点の候補を前記始点と認識することを特徴とする検査条件設定方法。
【請求項9】
請求項6に記載の検査条件設定方法において、
前記絶対値が前記閾値より大きく、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値より大きかった場合は、前記絶対値を有する画素を前記終点の候補とすることを特徴とする検査条件設定方法。
【請求項10】
請求項9に記載の欠陥検査装置において、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合より大きければ前記終点の候補を前記終点と認識することを特徴とする検査条件設定方法。
【請求項1】
欠陥検査装置において、
複数の素子を集めて配置することで形成された集団の画像を得て、前記画像のグレイレベルを所定の間隔に区切り、区切られたグレイレベル同士について前記所定の間隔毎に引き算を行い、前記引き算の結果の絶対値と閾値とを比較することで前記集団の始点、及び終点のうち少なくとも1つの位置を得る処理部を有することを特徴とする欠陥検査装置。
【請求項2】
請求項1に記載の欠陥検査装置において、
前記処理部は、
前記絶対値が前記閾値以下であり、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値以下であった場合は、前記絶対値を有する画素を前記始点の候補とすることを特徴とする欠陥検査装置。
【請求項3】
請求項2に記載の欠陥検査装置において、
前記処理部は、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合以下であれば前記始点の候補を前記始点と認識することを特徴とする検査装置。
【請求項4】
請求項1に記載の欠陥検査装置において、
前記処理部は、
前記絶対値が前記閾値より大きく、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値より大きかった場合は、前記絶対値を有する画素を前記終点の候補とすることを特徴とする欠陥検査装置。
【請求項5】
請求項4に記載の欠陥検査装置において、
前記処理部は、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合より大きければ前記終点の候補を前記終点と認識することを特徴とする検査装置。
【請求項6】
欠陥検査の検査条件設定方法において、
複数の素子を集めて配置することで形成された集団の画像を得て、
前記画像のグレイレベルを所定の間隔に区切り、
区切られたグレイレベル同士について前記所定の間隔毎に引き算を行い、
前記引き算の結果の絶対値と閾値とを比較することで前記集団の始点、及び終点のうち少なくとも1つの位置を得ることを特徴とする検査条件設定方法。
【請求項7】
請求項6に記載の検査条件設定方法において、
前記絶対値が前記閾値以下であり、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値以下であった場合は、前記絶対値を有する画素を前記始点の候補とすることを特徴とする検査条件設定方法。
【請求項8】
請求項7に記載の検査条件設定方法であって、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合以下であれば前記始点の候補を前記始点と認識することを特徴とする検査条件設定方法。
【請求項9】
請求項6に記載の検査条件設定方法において、
前記絶対値が前記閾値より大きく、
さらに、前記絶対値を得られた画素以降の所定の画素が前記閾値より大きかった場合は、前記絶対値を有する画素を前記終点の候補とすることを特徴とする検査条件設定方法。
【請求項10】
請求項9に記載の欠陥検査装置において、
前記絶対値を得た引き算より後の引き算を行った画素のグレイレベルが前記閾値の所定の割合より大きければ前記終点の候補を前記終点と認識することを特徴とする検査条件設定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−178159(P2012−178159A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2012−59628(P2012−59628)
【出願日】平成24年3月16日(2012.3.16)
【分割の表示】特願2006−234832(P2006−234832)の分割
【原出願日】平成18年8月31日(2006.8.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成24年3月16日(2012.3.16)
【分割の表示】特願2006−234832(P2006−234832)の分割
【原出願日】平成18年8月31日(2006.8.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]