
欠陥補正装置、欠陥補正方法および撮像装置
【課題】立体感を損なうことなく3D画像を構成する2つの画像に対する欠陥補正を行う欠陥補正装置、欠陥補正方法および撮像装置を提供する。
【解決手段】第1の画像における欠陥画素を検出し、第2の画像における欠陥画素を検出し、第1の画像において検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において検出された欠陥画素により構成される欠陥領域を検出し、第1の画像において検出された欠陥画素および検出された欠陥領域に基づいて第1の画像において欠陥補正を行う範囲を設定し、第2の画像において検出された欠陥画素および検出された欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、設定された補正範囲に基づいて第2の画像について欠陥補正処理を行う欠陥補正装置である。
【解決手段】第1の画像における欠陥画素を検出し、第2の画像における欠陥画素を検出し、第1の画像において検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において検出された欠陥画素により構成される欠陥領域を検出し、第1の画像において検出された欠陥画素および検出された欠陥領域に基づいて第1の画像において欠陥補正を行う範囲を設定し、第2の画像において検出された欠陥画素および検出された欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、設定された補正範囲に基づいて第2の画像について欠陥補正処理を行う欠陥補正装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、欠陥補正装置、欠陥補正方法および撮像装置に関し、詳しくは、3D画像を構成する2つの画像に対する欠陥補正を行う欠陥補正装置、欠陥補正方法および撮像装置に関する。
【背景技術】
【0002】
従来から、撮像素子などにおける欠陥検出および欠陥補正は2Dカメラにおいて広く行われている(特許文献1)。そして、3Dカメラにおいては、2Dカメラと同様の方法をL画像、R画像にそれぞれ適用しているのが現状である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−290653号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、3Dカメラの場合、L画像、R画像それぞれに独立して欠陥補正を施すと画像が本来のL画像、R画像とは異なるものとなり、自然な立体感が損なわれることとなる。
【0005】
本技術は、このような見解決の問題に鑑みてなされたものであり、3Dの立体感を損なうことなく欠陥補正を行うことができる欠陥補正装置、欠陥補正方法および撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、第1の技術は、第1の画像における欠陥画素を検出する第1の欠陥検出部と、第2の画像における欠陥画素を検出する第2の欠陥検出部と、第1の画像において、第1の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において、第2の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、第1の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、第2の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、第1の補正範囲設定部により設定された補正範囲に基づいて第1の画像の欠陥補正処理を行う第1の欠陥補正部と、第2の補正範囲設定部により設定された補正範囲に基づいて第2の画像の欠陥補正処理を行う第2の欠陥補正部とを備える欠陥補正装置である。
【0007】
また、第2の技術は、第1の画像における欠陥画素を検出し、第2の画像における欠陥画素を検出し、第1の画像において検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において検出された欠陥画素により構成される欠陥領域を検出し、第1の画像において検出された欠陥画素および検出された欠陥領域に基づいて第1の画像において欠陥補正を行う範囲を設定し、第2の画像において検出された欠陥画素および検出された欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、設定された補正範囲に基づいて第2の画像について欠陥補正処理を行う欠陥補正方法である。
【0008】
さらに、第3の技術は、光学系を介した光を受光して第1の画像を生成する第1の撮像部と、光学系を介した光を受光して第2の画像を生成する第2の撮像部と、第1の画像における欠陥画素を検出する第1の欠陥検出部と、第2の画像における欠陥画素を検出する第2の欠陥検出部と、第1の画像において、第1の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において、第2の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、第1の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、第2の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、第1の補正範囲設定部により設定された補正範囲に基づいて第1の画像の欠陥補正処理を行う第1の欠陥補正部と、第2の補正範囲設定部により設定された補正範囲に基づいて第2の画像の欠陥補正処理を行う第2の欠陥補正部とを備える撮像装置である。
【発明の効果】
【0009】
本技術によれば、3Dの立体感を損なうことなく画像の欠陥の補正を行うことができる。
【図面の簡単な説明】
【0010】
【図1】図1は、従来技術を欠陥補正に適用した場合の問題点を説明するための図である。
【図2】図2は、本技術に係る欠陥補正装置によって行われる欠陥補正の概要を示す説明図である。
【図3】図3は、欠陥補正装置の構成を示すブロック図である。
【図4】図4は、本技術の係る欠陥補正装置を備える撮像装置の構成を示すブロック図である。
【図5】図5は、欠陥補正装置により行われる欠陥補正処理の第1の手法を示すフローチャートである。
【図6】図6は、欠陥補正処理の第1の手法を示すフローチャートである。
【図7】図7は、欠陥補正装置により行われる欠陥補正処理の第2の手法を示すフローチャートである。
【図8】図8は、欠陥補正処理の第2の手法を示すフローチャートである。
【図9】図9は、欠陥補正処理の第2の手法による効果を説明するための図である。
【図10】図10は、欠陥補正装置により行われる欠陥補正処理の第3の手法を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、本技術の実施の形態について図面を参照しながら説明する。ただし、本技術は以下の実施の形態のみに限定されるものではない。なお、説明は以下の順序で行う。
<1.実施の形態>
[1−1.欠陥補正処理の概要]
[1−2.欠陥補正装置の構成]
[1−3.欠陥補正装置を備える撮像装置の構成]
[1−4.欠陥補正処理の第1の手法]
[1−5.欠陥補正処理の第2の手法]
[1−6.欠陥補正処理の第3の手法]
<2.変形例>
【0012】
<1.実施の形態>
[1−1.欠陥補正処理の概要]
まず、本技術に係る欠陥補正装置によって行われる欠陥補正の概要について図1および図2を参照して説明する。欠陥補正装置は、例えば、イメージャなどの光学撮像系、画像エンジンなどを左目用と右目用とで2つ備え、3次元画像(3D画像)の撮影機能を持つ2眼の撮像装置などに搭載されて用いられる。
【0013】
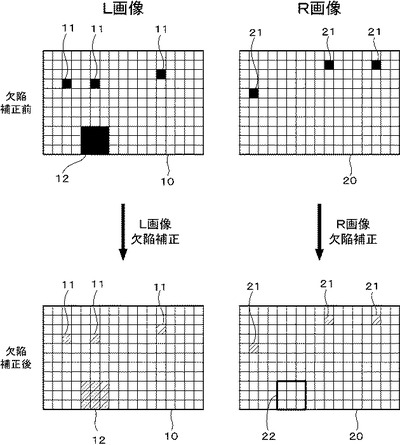
図1は、本技術を用いずに、左目用画像(以下、L画像10と称する。)と右目用画像(以下、R画像20と称する。)それぞれに独立して欠陥画素に対して補正処理を施した場合の画像を示す図である。
【0014】
ここで、欠陥画素とは、何らかの原因により本来の画像信号ではなく異常な画像信号を出力し、出力画像において画像の断続や不鮮明さなどの画像欠陥を生じさせる欠陥を有する画素のことをいう。欠陥画素は製造時に生じる場合もあれば、撮像装置の使用に伴う経年劣化により生じる場合もある。
【0015】
また、欠陥補正処理は例えば、欠陥画素である補正対象の画素と、その補正対象画素の周囲8方向の正常な画素の平均値とを置き換えることにより行われる。
【0016】
図1上段の2つの画像は欠陥補正処理を施す前のL画像10およびR画像20である。また、図1下段は欠陥補正後のL画像10およびR画像20である。各画像のマス目は画素を表している。また、図1上段において黒色の画素は欠陥画素を表している。さらに、図1下段において、斜線が描かれた画素は補正処理がなされた画素を表している。
【0017】
図1に示されるようにL画像10には複数の小さな欠陥11、11、11と、隣接する複数の欠陥画素からなる大きな欠陥(以下、隣接する複数の欠陥画素からなり、所定サイズ以上のサイズを有する領域を欠陥領域と称する。)である欠陥領域12があり、R画像20には複数の小さな欠陥21、21、21がある。
【0018】
通常の2次元画像(2D)用の欠陥補正処理を3D撮影用の2眼の撮像装置により撮影されたL画像10、R画像20に適用する場合、L画像10、R画像20それぞれに独立して欠陥補正処理が施される。図1上段に示されたL画像10、R画像20のそれぞれに独立して欠陥補正処理を施すと、図1下段の画像に示されるようになる。
【0019】
図1下段からわかるように、L画像10の小さな欠陥11が補正されており、R画像20においても小さな欠陥21が補正されている。また、L画像10には大きな欠陥である欠陥領域12があったため、その欠陥領域12も補正されている。R画像20には欠陥領域は存在しないため、R画像20におけるL画像10の大きな欠陥に対応する範囲22において欠陥補正は行われていない。
【0020】
そうすると、L画像10とR画像20とでは、L画像10の欠陥領域12と、R画像におけるL画像の欠陥領域に対応する範囲22とで大きな相違が生じることとなる。3D画像においてはL画像とR画像の僅かな違いが3Dの立体感に大きな影響を与えるため、図1下段に示されるように、L画像10とR画像20とで大きな相違があると3Dの立体感が損なわれてしまうこととなる。なお、小さな欠陥はL画像とR画像とで個別に欠陥補正を施しても、そのサイズから3Dの立体感を損なうおそれが少ないと考えられる。
【0021】
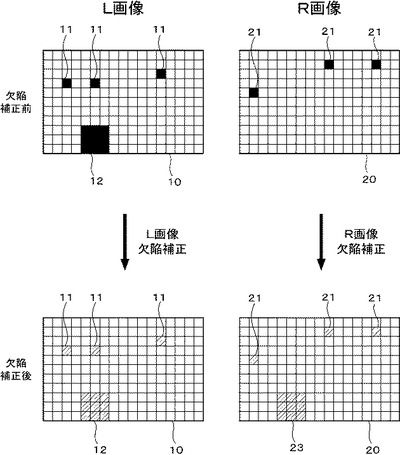
そこで、本技術に係る欠陥補正装置では、図2に示されるように欠陥補正を行う。図2上段には欠陥補正処理を施す前のL画像10およびR画像20が示されている。図2下段には下段に欠陥補正後のL画像10およびR画像20を示されている。
【0022】
本技術係る欠陥補正装置においても、3Dの立体感を損なうおそれが少ないと考えられる小さな欠陥についてはL画像10とR画像20とで独立して欠陥補正が行われる。一方、L画像10に存在する、隣接する複数の欠陥画素により構成される欠陥領域12は、面積が大きいため、L画像のみについて欠陥補正を行うと、L画像10とR画像20とで大きな違いが生じて、3Dの立体感を損なわれるおそれがある。
【0023】
そこで、L画像10の欠陥領域12について欠陥補正を行うと共に、図2下段に示されるように、R画像20中のL画像の欠陥領域に対応する範囲23も欠陥領域とみなして同様に欠陥補正を行う。これは、R画像20中のL画像10の欠陥領域12に対応する位置に欠陥画素がない場合でも行うようにする。これにより、L画像とR画像とでは同じ位置で欠陥補正が行われるため、L画像10とR画像20に大きな相違点が存在して3Dの立体感が損なわれる、ということを防止することが可能となる。なお、このように、欠陥はないが、欠陥領域とみなされて欠陥補正の対象となる範囲を「みなし欠陥領域」と称する。
【0024】
上記説明はL画像10の欠陥領域12に対応する範囲をR画像中のみなし欠陥領域とする、と説明したが、逆も同様であり、R画像20に欠陥領域がある場合にはそれに対応する範囲がL画像中でみなし欠陥領域となる。
【0025】
[1−2.欠陥補正装置の構成]
図3は、本技術に係る欠陥補正装置100の構成を示すブロック図である。欠陥補正装置100は、例えば、イメージャなどの光学撮像系、画像エンジンなどをL側用とR側用とで2つずつ備える3D画像の撮影機能を持つ2眼の撮像装置などに搭載されて用いられる。
【0026】
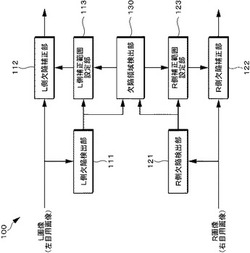
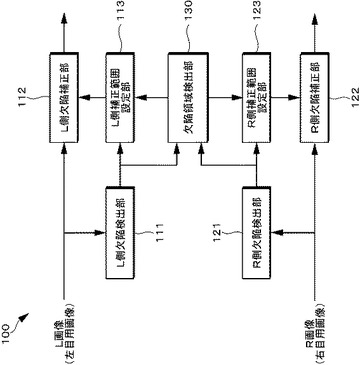
欠陥補正装置100は、L側欠陥検出部111、L側欠陥補正部112、L側補正範囲設定部113、R側欠陥検出部121、R側欠陥補正部122、R側補正範囲設定部123、欠陥領域検出部130とから構成されている。これらは、その機能を備える例えば、回路、IC(Integrated Circuit)、マイコンなどにより実現される。また、CPU(Central Processing Unit)、RAM(Random Access Memory)およびROM(Read Only Memory)などからなり、CPUがROMに記憶されたプログラムに従い様々な処理を実行することによって、各部の機能を実現するようにしてもよい。
【0027】
L側欠陥検出部111およびL側欠陥補正部112には左目用画像であるL画像が入力される。R側欠陥検出部121およびR側欠陥補正部122には右目用画像であるR画像が入力される。L画像は例えば、L画像撮影用の光学撮像系および撮像素子によって生成された画像であり、R画像は例えば、R画像撮影用の光学撮像系および撮像素子によって生成された画像である。
【0028】
光学撮像系は、被写体からの光を撮像素子に集光するためのレンズ、レンズを移動させてフォーカス合わせやズーミングを行うための駆動機構、シャッタ機構、アイリス機構などから構成されている。光学撮像系を介して得られた被写体の光画像は、撮像素子上に結像される。
【0029】
撮像素子は、被写体からの入射光を光電変換して電荷量に変換し、画像信号として出力する。撮像素子12から出力された撮像信号はL側欠陥検出部111およびL側欠陥補正部112に出力される。撮像素子としては、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)などが用いられる。
【0030】
L側欠陥検出部111は、L画像を生成する撮像素子において発生する欠陥を検出するものである。欠陥の検出方法としては、種々の公知の検出方法を採用することができる。例えば、検出対象である画素と、その画素の周囲8方向の画素の平均値との比較を行い、その平均値から所定量離間している場合に検出対象の画素は欠陥画素として判定する、という方法がある。
【0031】
また、工場等からの出荷前に撮像素子に対してテストを行い、テストの結果得られた全ての欠陥画素のアドレスを不揮発性メモリ(図示せず。)に格納し、そのアドレスに基づいて欠陥画素を検出するという方法もある。R側欠陥検出部121も同様にして、R画像を生成する撮像素子において発生する欠陥を検出するものである。
【0032】
L側欠陥検出部111により検出された欠陥画素を示すL側欠陥画素情報はL側補正範囲設定部113および欠陥領域検出部130に供給される。R側欠陥検出部121により検出されたR側欠陥画素情報はR側補正範囲設定部123および欠陥領域検出部130に供給される。
【0033】
欠陥領域検出部130は、L側欠陥検出部111から供給された欠陥画素情報に基づいて、L画像において隣接する複数の欠陥画素によって構成される領域を検出する。L画像において隣接する複数の欠陥画素によって構成される領域をL側欠陥領域と称する。また、R側欠陥検出部121から供給された欠陥画素情報に基づいてR画像において隣接する複数の欠陥画素によって構成される領域を検出する。R画像において隣接する複数の欠陥画素によって構成される領域をR側欠陥領域と称する。欠陥領域の検出の詳細については後述する。
【0034】
欠陥領域検出部130は、L画像およびR画像における欠陥領域の位置を示す欠陥領域情報をL側補正範囲設定部113とR側補正範囲設定部123に供給する。
【0035】
L側補正範囲設定部113は、L側欠陥検出部111からの欠陥画素情報および欠陥領域検出部130からの欠陥領域情報に基づいて、L画像における欠陥補正を行う範囲を設定するものである。L画像における補正範囲を示すL側補正範囲情報はL側欠陥補正部112に供給される。
【0036】
R側補正範囲設定部123は、R側欠陥検出部121からの欠陥画素情報および欠陥領域検出部130からの欠陥領域情報に基づいて、R画像における欠陥補正を行う範囲を設定するものである。R画像における補正範囲を示すR側補正範囲情報はR側欠陥補正部122に供給される。なお、欠陥補正を行う範囲決定の詳細については後述する。
【0037】
L側欠陥補正部112は、L側補正範囲設定部113から供給された補正範囲情報に基づいてL画像に対して補正処理を行うものである。補正処理としては種々の公知の補正方法を用いることができる。例えば、欠陥画素である補正対象画素と、その補正対象画素の周囲8方向の正常な画素の平均値とを置き換えることにより行われる。L側欠陥補正部112により欠陥補正処理が施された画像信号、例えば、撮像装置200のカメラ処理部などに供給される。
【0038】
R側欠陥補正部122は、R側補正範囲設定部123から供給された補正範囲情報に基づいてR画像に対して補正処理を行うものである。欠陥補正が施されたL画像およびR画像は欠陥補正装置が適用された撮像装置のカメラ処理部などに供給される。以上のようにして欠陥補正装置が構成されている。
【0039】
[1−3.欠陥補正装置を備える撮像装置の構成]
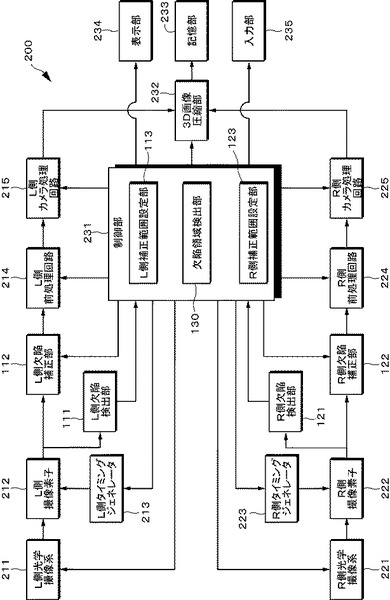
上述のように構成された欠陥補正装置100は、イメージャなどの光学撮像系、画像エンジンなどを左目用と右目用とで2つずつ備える3D画像の撮影機能を持つ2眼の撮像装置200に搭載されて用いられる。図4は欠陥補正装置の機能を備え、3D撮影機能を持つ撮像装置200の構成を示すブロック図である。
【0040】
撮像装置200は、L画像を撮影するための、L側光学撮像系211、L側撮像素子212、L側タイミングジェネレータ213、L側前処理回路214、L側カメラ処理回路215を備える。また、R画像を撮影するためのR側光学撮像系221、R側撮像素子222、R側タイミングジェネレータ223、R側前処理回路224、R側カメラ処理回路225を備える。さらに、制御部231、3D画像圧縮部232、記憶部233、表示部234、入力部235を備える。
【0041】
また、欠陥補正装置を構成する、L側欠陥検出部111、L側欠陥補正部112、L側補正範囲設定部113、R側欠陥検出部121、R側欠陥補正部122、R側補正範囲設定部123、欠陥領域検出部130も備える。
【0042】
L側光学撮像系211は、被写体からの光を撮像素子に集光するためのレンズ、レンズを移動させてフォーカス合わせやズーミングを行うための駆動機構、シャッタ機構、アイリス機構などから構成されている。これらは制御部231からの制御信号に基づいて駆動される。L側光学撮像系211を介して得られた被写体の光画像は、撮像デバイスとしてのL側撮像素子212上に結像される。
【0043】
L側撮像素子212は、L側タイミングジェネレータ213から出力されるタイミング信号に基づいて駆動され、被写体からの入射光を光電変換して電荷量に変換し、画像信号として出力する。L側撮像素子212から出力される画像信号はL側欠陥補正部112およびL側欠陥検出部111に供給される。L側撮像素子212としては、CCD、CMOSなどが用いられる。L側タイミングジェネレータ213は、制御部231の制御に従いL側撮像素子212に対してタイミング信号を出力する。
【0044】
L側欠陥補正部112により欠陥補正処理が施された画像信号はL側前処理回路214に供給される。L側前処理回路214は、画像信号に対して、CDS(Correlated Double Sampling)処理によりS/N(Signal/Noise)比を良好に保つようにサンプルホールドなどを行う。さらに、AGC(Auto Gain Control)処理により利得を制御し、A/D(Analog/Digital)変換を行ってデジタル画像データを出力する。
【0045】
L側カメラ処理回路215は、前処理回路からの画像データに対して、ホワイトバランス調整処理や色補正処理、ガンマ補正処理、Y/C変換処理、AE(Auto Exposure)処理などの信号処理を施す。L側カメラ処理回路215により所定の処理が施された画像データは3D画像圧縮部232に供給される。
【0046】
R画像を撮影するためのR側光学撮像系221、R側撮像素子222、R側タイミングジェネレータ223、R側前処理回路224、R側カメラ処理回路225は上述したL画像を撮影するための構成と同様のものであるためその説明を省略する。
【0047】
制御部231は、例えばCPU、RAMおよびROMなどから構成されている。ROMには、CPUにより読み込まれ動作されるプログラムなどが記憶されている。RAMは、CPUのワークメモリとして用いられる。CPUは、ROMに記憶されたプログラムに従い様々な処理を実行してコマンドの発行を行うことによって撮像装置200全体の制御を行う。また、制御部231は所定のプログラムを実行することにより、L側補正範囲設定部113、R側補正範囲設定部123および欠陥領域検出部130として機能する。
【0048】
3D画像圧縮部232に供給されたL画像データおよびR画像データは、3D画像圧縮部232においてそれぞれ圧縮され、1つの3D画像ファイルに格納されて最終的に記憶部233に保存される。3D画像ファイルには、3D圧縮画像データとともに、被写体距離情報、視差情報および輻輳角に関する情報などが含まれるようにしてもよい。記憶部233は、例えば、ハードディスク、不揮発性メモリなどの大容量記憶媒体である。
【0049】
表示部234は、例えば、LCD(Liquid Crystal Display)、PDP(Plasma Display Panel)、有機EL(Electro Luminescence)パネルなどにより構成された表示手段である。表示部234には、撮像中のスルー画、記憶部233に記録された画像などが表示される。
【0050】
入力部235は、例えば、電源オン/オフ切り替えのための電源ボタン、撮像画像の記録の開始を指示するためのレリーズボタン、ズーム調整用の操作子、表示部234と一体に構成されたタッチスクリーンなどからなる入力手段である。入力部235に対して入力がなされると、その入力に応じた制御信号が生成されて制御部231に出力される。そして、制御部231はその制御信号に対応した演算処理や制御を行う。
【0051】
なお、図4においては、L画像はL側欠陥補正部112により欠陥補正処理が施された後にL側前処理回路214およびL側カメラ処理回路215で所定の処理が行われるように構成されている。しかし、構成はそれに限られるものではなく、L側前処理回路214およびL側カメラ処理回路215による処理の後にL画像に対してL側欠陥補正部112による欠陥補正が行われるようにしてもよい。R側欠陥補正部122について同様である。
【0052】
[1−4.欠陥補正処理の第1の手法]
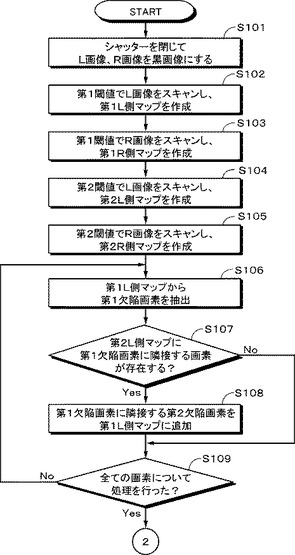
次に欠陥補正装置により行われる欠陥補正処理について説明する。図5および図6は欠陥補正処理の第1の手法を示すフローチャートである。
【0053】
まずステップS101で、欠陥補正装置が適用される撮像装置のシャッタを閉じて、L画像、R画像がともに黒画像となるようにする。これにより、欠陥のない画素では画素レベルの値として0レベルが得られ、欠陥画素では画素レベルの値として0レベルより大きな値が得られることとなる。これにより、欠陥画素を検出することができる。
【0054】
次にステップS102で、L側欠陥検出部111は、画素レベルに対する閾値である第1閾値でL画像全体をスキャンし、L画像を構成する全ての画素のうち、第1閾値を超えるレベルを有する画素を検出する。そして、その結果から第1L側マップを作成する。第1L側マップはL画像において第1閾値を超える欠陥画素の位置を示すL側欠陥画素情報に相当するものである。
【0055】
また、ステップS103で、R側欠陥検出部121は、画素レベルに対する閾値である第1閾値でR画像全体をスキャンし、R画像を構成する全ての画素のうち、第1閾値を超えるレベルを有する画素を検出する。そして、その結果から第1R側マップを作成する。第1R側マップはR画像において第1閾値を超える欠陥画素の位置を示すR側欠陥画素情報に相当するものである。なお、L画像をスキャンする際に用いる第1閾値とR画像をスキャンする際に用いられる第1閾値とは同じ値である。
【0056】
次にステップS104で、L側欠陥検出部111は、画素レベルに対する閾値である第2閾値でL画像全体をスキャンし、L画像を構成する全ての画素のうち、第2閾値を超えるレベルを有する画素を検出する。そして、その結果から第2L側マップを作成する。第2L側マップもL画像において第2閾値を超える欠陥画素の位置を示すL側欠陥画素情報に相当するものである。なお、第2閾値は上述した第1閾値よりも小さい値に設定されている。
【0057】
またステップS105で、R側欠陥検出部121は、画素レベルに対する閾値である第2閾値でR画像を全体をスキャンし、R画像を構成する全ての画素のうち、第2閾値を超えるレベルを有する画素を検出する。そして、その結果から第2R側マップを作成する。第2R側マップもR画像において第2閾値を超える欠陥画素の位置を示すR側欠陥画素情報に相当するものである。なお、L画像をスキャンする際に用いる第2閾値とR画像をスキャンする際に用いられる第2閾値とは同じ値である。
【0058】
L側欠陥画素情報である第1L側マップ、第2L側マップは欠陥領域検出部130およびL側補正範囲設定部113に供給される。また、R側欠陥画素情報である第1R側マップ、第2R側マップは欠陥領域検出部130およびR側補正範囲設定部123に供給される。
【0059】
なお、L側欠陥検出部111とR側欠陥検出部121による処理は並列的に行われる。
また、ステップS102乃至ステップS105を行う順序は上述した順序に限られるものではなく順不同である。第2閾値によるスキャンを第1閾値によるスキャンよりも先に行ってもよい。
【0060】
次にステップS106で、欠陥領域検出部130は、第1L側マップに表された第1閾値を越えたレベルを有する画素(第1欠陥画素と称する。)から一つを抽出する。次にステップS107で、第2L側マップを参照して、第2閾値を越えた画素(第2欠陥画素と称する。)の中に第1欠陥画素に隣接する画素が存在するか否かを判定することにより、隣接する複数の欠陥画素からなる「欠陥領域」を検出する。隣接する欠陥画素が存在する場合には処理はステップS108に進む(ステップS107のYes)。検出結果を示すL側欠陥領域情報はL側補正範囲設定部113に供給される。
【0061】
そしてステップS108で、L側補正範囲設定部113は、L側欠陥領域情報に基づいて、第1閾値超え画素に隣接すると判定された第2閾値超え画素の位置を第1L側マップに追加する。このステップS108は、第2閾値超え画素のうち第1閾値超え画素に隣接するものと、第1閾値超え画素とを一つのマップにまとめようとする処理である。これにより、第1画素と、第1画素に隣接する第2画素とにより構成される欠陥領域が補正範囲として設定される。
【0062】
そして、処理はステップS109に進む。なお、ステップS107で、隣接する画素が存在しないと判定された場合も処理もステップS109に進む(ステップS107のNo)。
【0063】
次にステップS109で、欠陥補正装置は、第1L側マップの全ての第1欠陥画素について上記ステップS106乃至ステップS108の処理が行われたか否かを判定する。全ての第1欠陥画素について処理が行われていない場合には処理はステップS106に進む(ステップS109のNo)。そして、第1L側マップの全ての第1欠陥画素について処理が行われるまでステップS106乃至ステップS109が繰り返される。第1L側マップの全ての第1欠陥画素について上記ステップS106乃至ステップS108の処理が行われた場合、処理はステップS110に進む(ステップS109のYes)。
【0064】
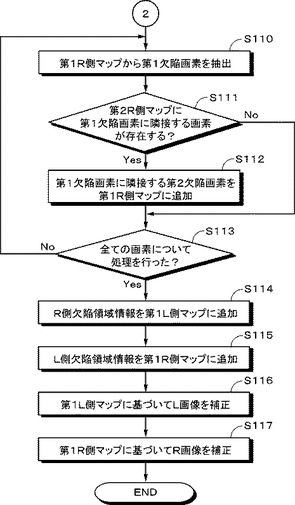
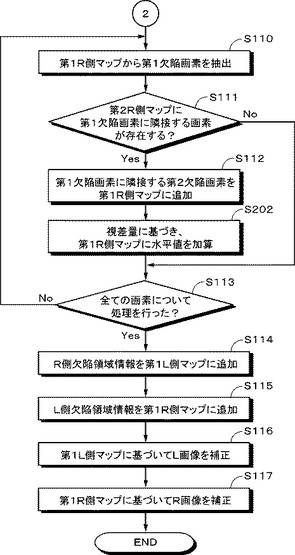
次にステップS110で、欠陥領域検出部130は、第1R側マップに表された第1閾値を越えたレベルを有する画素(第1欠陥画素と称する。)から一つを抽出する。次にステップS111で、第2R側マップを参照して、第2閾値を越えた画素(第2欠陥画素と称する。)の中に第1欠陥画素に隣接する画素が存在するか否かを判定することにより、隣接する複数の欠陥画素からなる「欠陥領域」を検出する。隣接する欠陥画素が存在する場合には処理はステップS112に進む(ステップS110のYes)。検出結果を示す欠陥領域情報はR側補正範囲設定部123に供給される。
【0065】
そして、ステップS110で、R側補正範囲設定部123は、R側欠陥領域情報に基づいて、第1閾値超え画素に隣接すると判定された第2閾値超え画素の位置を第1R側マップに追加する。このステップS110は、第2閾値超え画素のうち第1閾値超え画素に隣接するものと、第1閾値超え画素とを一つのマップにまとめようとする処理である。これにより、第1画素と、第1画素に隣接する第2画素とにより構成される欠陥領域が補正範囲として設定される。
【0066】
そして、処理はステップS113に進む。なお、ステップS111で、隣接する画素が存在しないと判定された場合も処理もステップS113に進む(ステップS111のNo)。
【0067】
次にステップS113で、欠陥補正装置100は、第1R側マップの全ての第1欠陥画素について上記ステップS110乃至ステップS112の処理が行われたか否かを判定する。全ての第1欠陥画素について処理が行われていない場合には処理はステップS110に進む(ステップS113のNo)。そして、第1R側マップの全ての第1欠陥画素について処理が行われるまでステップS110乃至ステップS113が繰り返される。
【0068】
ステップS113で、第1R側マップの全ての第1欠陥画素について上記ステップS110乃至ステップS112の処理が行われたと判定された場合、処理はステップS114に進む。
【0069】
次にステップS114で、L側補正範囲設定部113は、欠陥領域検出部130から供給された欠陥領域情報に示されるR画像の欠陥領域を第1L側マップに追加する。次にステップS115で、R側補正範囲設定部123は、欠陥領域検出部130から供給された欠陥領域情報に示されるL画像の欠陥領域を第1R側マップに追加する。これにより、第1L側マップおよび第1R側マップにそれぞれみなし欠陥領域が追加されることとなる。なお、欠陥領域がない場合にはこの処理は行われない。
【0070】
以上の処理により作成された第1L側マップがL画像において欠陥補正が行われる範囲を示したL側補正範囲情報となる。第1L側マップはL側補正範囲設定部113からL側欠陥補正部112に供給される。また、以上の処理により作成された第1R側マップがRが像において欠陥補正が行われる範囲を示したR側補正範囲情報となる。第1R側マップはR側補正範囲設定部123からR側欠陥補正部122に供給される。
【0071】
そしてステップS116で、L側欠陥補正部112は第1L側マップに基づいてL画像の欠陥補正を行う。また、ステップS117で、R側欠陥補正部122は第1R側マップに基づいてR画像の欠陥補正を行う。
【0072】
第1L側マップには、L画像の欠陥画素、欠陥領域、さらにR画像における欠陥領域に対応するみなし欠陥領域が表されている。また、第1R側マップにはR画像の欠陥画素、欠陥領域、さらにL画像における欠陥領域に対応するみなし欠陥領域が表されている。よって、L側欠陥補正部112が第1L側マップに基づいて欠陥補正を行うことにより、L画像ではL画像の欠陥画素と、L画像の欠陥領域と、R画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。同様に、R側欠陥補正部122が第1R側マップに基づいて補正を行うことにより、R画像ではR画像の欠陥画素とR画像の欠陥領域とL画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。これにより、上述した図2に示されるような欠陥補正が行うことができる。
【0073】
このように、欠陥補正の第1の手法では、第1閾値と、第1閾値より小さな値である第2閾値とを用いる。これにより、第1閾値のみでは孤立した欠陥画素であっても、第2閾値以上の画素レベルの欠陥画素を組み合わせることにより、複数の欠陥画素からなる大きな面積を有する欠陥領域を検出することが可能となる。
【0074】
[1−5.欠陥補正処理の第2の手法]
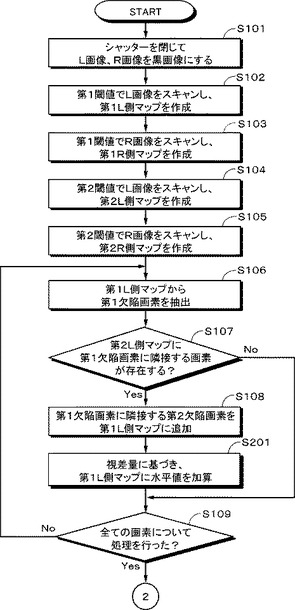
次に、欠陥補正処理の第2の手法について説明する。図7および図8は、欠陥補正処理の第2の手法を示すフローチャートである。なお、ステップS101乃至ステップS117については第1の手法と同様であるため、説明を省略する。第2の手法は、ステップS201とステップS202を行う点で第1の手法と相違する。
【0075】
ステップS201で、L側補正範囲設定部113は、L画像とR画像の視差量を算出し、その視差量に応じて、第1L側マップのみなし欠陥領域に水平値を加算し、みなし欠陥領域の位置を視差量分ずらす。なお、視差とは、L画像とR画像の各々に含まれる近景被写体の水平方向の位置の差として定義される。視差が大きくなるほど、3D表示される被写体の奥行きが深くなる、すなわち、凹凸の度合いが強くなる。また、視差は、近景のL画像上での画像左端からの距離から、近景のR画像上での画像左端からの距離を引いた差として定義することも可能である。
【0076】
同様に、ステップS202で、R側補正範囲設定部123は、L画像とR画像の視差量を算出し、その視差量に応じて、第1R側マップのみなし欠陥領域に水平値を加算し、みなし欠陥領域の位置を視差量分ずらす。
【0077】
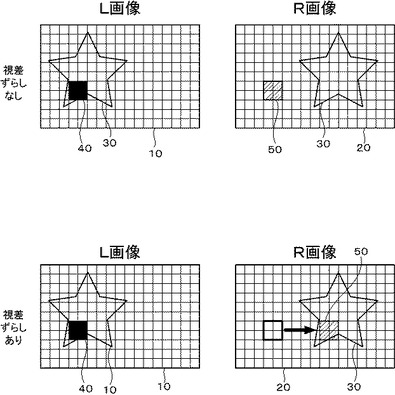
ここで、上述した第2の手法における上述の処理による効果について図9を参照して説明する。図9上段は第2の手法を適用していないL画像10およびR画像20を示すものである。図9下段は第2の手法の適用したL画像10およびR画像20を示すものである。
【0078】
3D映像を構成するL画像10とR画像20とでは視差が生じる。近景撮影など、ピントが合っている被写体が近い場合には視差は大きくなる。視差が大きくなると、図9に示されるように、被写体(図9においては星)30の画像中における位置はL画像10とR画像20とで視差の分ずれている。
【0079】
この状態において、図9のL画像10に示されるように、被写体(星)30に重なるように欠陥領域40が存在する場合、その欠陥領域40の位置をそのままR画像に対応させてR画像20におけるみなし欠陥領域50とすると、R画像20においてはみなし欠陥領域50が星には重ならないこととなる。
【0080】
この状態で、L画像10およびR画像20に欠陥補正処理を施すと、L画像10の被写体(星)30に重なった欠陥領域40の補正が行われる。しかし、R画像20においては、みなし欠陥領域50は被写体(星)30に重なっていないため、被写体(星)30上の領域は欠陥補正されない。そうすると、被写体(星)30にL画像10とR画像20とで差異が生じて、3Dの立体感が損なわれることとなる。
【0081】
そこで、図9下段に示されるように、視差量の分、みなし欠陥領域50をずらすことにより、視差のズレが解消されて、L画像10、R画像20共に、被写体(星)30上で欠陥補正が行われることになる。これにより、L画像10とR画像20とで差異が生じることを防ぐことができる。なお、欠陥画素がピントがあっていない背景などに重なっている場合にはこの第2の手法は用いる必要はない。
【0082】
[1−6.欠陥補正処理の第3の手法]
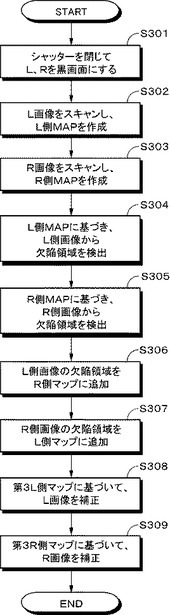
次に、欠陥補正処理の第3の手法について説明する。まずステップS301で、欠陥補正装置を備える撮像装置のシャッタを閉じて、L、Rともに黒画面とする。これにより、L画像、R画像ともに黒画像となり、欠陥のない画素では画素レベルの値として0レベルが得られ、欠陥画素では画素レベル値として0レベルより大きな値が得られることとなる。これにより、欠陥画素を検出することができる。
【0083】
次にステップS302で、L側欠陥検出部111は、L画像全体をスキャンし、L画像を構成する全ての画素のうち、画素レベルが0以上である画素を検出する。そして、その結果から第3L側マップを作成する。画素レベルが0以上である画素を欠陥画素とする。第3L側マップはL画像における欠陥画素の位置を示すL側欠陥画素情報に相当するものである。
【0084】
次にステップS303で、R側欠陥検出部121は、R画像全体をスキャンし、R画像を構成する全ての画素のうち、画素レベルが0以上である画素を検出する。そして、その結果から第1R側マップを作成する。画素レベルが0以上である画素が欠陥画素である。第3R側マップはR画像における欠陥画素の位置を示すR側欠陥画素情報に相当するものである。
【0085】
次にステップS304で、欠陥領域検出部130は、第1L側マップに基づいてL画像において欠陥画素が所定数以上隣接している領域(以下、欠陥領域と称する。)を検出する。所定数とは例えば、「2×2(4個)」、「3×3(9個)」、「4×4(16個)」などである。検出されたL側欠陥領域を示すL側欠陥領域情報は、欠陥領域検出部130からL側補正範囲設定部113およびR側補正範囲設定部123に供給される。
【0086】
この所定数は、例えば、視差に応じて設定されるようにするとよい。例えば、撮像装置200のズーム倍率、フォーカス位置などに応じて設定されるようにしてもよい。例えば、フォーカス位置、ズーム倍率などに基づいて総合的に近景撮影か、遠景撮影かを判断し、近景の場合には視差が大きいとして「4×4(16個)」以上にする。一方、遠景場合には視差が小さいとして「2×2(4個)」にする、などである。
【0087】
これは、遠景に比べて近景は視差が大きくなるため、L画像、R画像でわずかにでも相違点がある、その相違点により3Dの立体感を損なわせてしまうおそれがあるからである。よって、近景の場合には遠景の場合に比べて欠陥領域として検出する画素の個数(言い換えると欠陥領域の面積)を少なくして、少量の欠陥画素が隣接している領域も欠陥領域としてL画像、R画像で補正する必要がある。
【0088】
次にステップS305で、欠陥領域検出部130は、同様に第1R側マップに基づいてR画像における欠陥領域の検出を行う。検出されたR側欠陥領域を示すR側欠陥領域情報は、欠陥領域検出部130からR側補正範囲設定部123およびL側補正範囲設定部113に供給される。
【0089】
次にステップS306で、L側補正範囲設定部113は、R画像の欠陥領域をみなし欠陥領域として第3L側マップに追加する。補正範囲情報である第3L側マップはL側補正範囲設定部113からL側欠陥補正部112に供給される。
【0090】
また、ステップS307で、R側補正範囲設定部123は、L画像の欠陥領域を第3R側マップに追加する。補正範囲情報である第3R側マップはR側補正範囲設定部123からR側欠陥補正部122に供給される。
【0091】
そして、ステップS308で、L側欠陥補正部112は第3L側マップに基づいてL画像の欠陥補正を行う。また、ステップS309で、R側欠陥補正部122は第3R側マップに基づいてR画像の欠陥補正を行う。
【0092】
第3L側マップには、L画像の欠陥画素、欠陥領域、さらにR画像における欠陥領域に対応したみなし欠陥領域が表されている。また、第3R側マップにはR画像の欠陥画素、欠陥領域、さらにL画像における欠陥領域に対応したみなし欠陥領域が表されている。よって、L側欠陥補正部112が第3L側マップに基づいて補正を行うことにより、L画像ではL画像の欠陥画素と欠陥領域、さらにR画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。同様に、R側欠陥補正部122が第3R側マップに基づいて補正を行うことにより、R画像ではR画像の欠陥画素と欠陥領域、さらにL画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。これにより、上述した図2に示されるような欠陥補正が行われることとなる。
【0093】
<2.変形例>
以上、本技術の一実施の形態について具体的に説明したが、本技術は上述の実施形態に限定されるものではなく、本技術の技術的思想に基づく各種の変形が可能である。
【0094】
本技術は3D画像の撮影機能を持つ2眼のデジタルスチルカメラ、3Dの動画撮影が可能な2眼おデジタルビデオカメラにも適用することが可能である。
【0095】
なお、本技術は以下のような構成も取ることができる。
【0096】
(1)第1の画像における欠陥画素を検出する第1の欠陥検出部と、
第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
欠陥補正装置。
【0097】
(2)前記欠陥領域検出部は、隣接する複数の欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)に記載の欠陥補正装置。
【0098】
(3)前記第1の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
前記(1)または(2)に記載の欠陥補正装置。
【0099】
(4)前記第1の補正範囲設定部は、前記第1の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を前記第1の画像において欠陥補正を行う範囲として設定する
前記(1)から(3)のいずれかに記載の欠陥補正装置。
【0100】
(5)前記第1の欠陥画素検出部は、第1の閾値と前記第1の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第1の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)から(4)のいずれかに記載の欠陥補正装置。
【0101】
(6)前記第1の補正範囲設定部は、前記第1の画像における、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
前記(1)から(5)のいずれかに記載の欠陥補正装置。
【0102】
(7)前記第2の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
前記(1)から(6)のいずれかに記載の欠陥補正装置。
【0103】
(8)前記第2の補正範囲設定部は、前記第2の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を前記第2の画像において欠陥補正を行う範囲として設定する
前記(1)から(7)のいずれかに記載の欠陥補正装置。
【0104】
(9)前記第2の欠陥画素検出部は、第1の閾値と前記第2の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第2の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)から(8)のいずれかに記載の欠陥補正装置。
【0105】
(10)前記第2の補正範囲設定部は、前記第2の画像における、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
前記(1)から(9)のいずれかに記載の欠陥補正装置。
【0106】
(11)第1の画像における欠陥画素を検出し、
第2の画像における欠陥画素を検出し、
前記第1の画像において検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において検出された前記欠陥画素により構成される欠陥領域を検出し、
前記第1の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第1の画像において欠陥補正を行う範囲を設定し、
前記第2の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、
設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、
設定された補正範囲に基づいて前記第2の画像について欠陥補正処理を行う
欠陥補正方法。
【0107】
(12)光学系を介した光を受光して第1の画像を生成する第1の撮像部と、
光学系を介した光を受光して第2の画像を生成する第2の撮像部と、
前記第1の画像における欠陥画素を検出する第1の欠陥検出部と、
前記第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
を備える撮像装置。
【符号の説明】
【0108】
100・・・・欠陥補正装置
111・・・・L側欠陥検出部
112・・・・L側欠陥補正部
113・・・・L側補正範囲設定部
121・・・・R側欠陥検出部
122・・・・R側欠陥補正部
123・・・・R側補正範囲設定部
130・・・・欠陥領域検出部
200・・・・撮像装置
212・・・・L側撮像素子
222・・・・R側撮像素子
【技術分野】
【0001】
本技術は、欠陥補正装置、欠陥補正方法および撮像装置に関し、詳しくは、3D画像を構成する2つの画像に対する欠陥補正を行う欠陥補正装置、欠陥補正方法および撮像装置に関する。
【背景技術】
【0002】
従来から、撮像素子などにおける欠陥検出および欠陥補正は2Dカメラにおいて広く行われている(特許文献1)。そして、3Dカメラにおいては、2Dカメラと同様の方法をL画像、R画像にそれぞれ適用しているのが現状である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−290653号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、3Dカメラの場合、L画像、R画像それぞれに独立して欠陥補正を施すと画像が本来のL画像、R画像とは異なるものとなり、自然な立体感が損なわれることとなる。
【0005】
本技術は、このような見解決の問題に鑑みてなされたものであり、3Dの立体感を損なうことなく欠陥補正を行うことができる欠陥補正装置、欠陥補正方法および撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、第1の技術は、第1の画像における欠陥画素を検出する第1の欠陥検出部と、第2の画像における欠陥画素を検出する第2の欠陥検出部と、第1の画像において、第1の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において、第2の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、第1の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、第2の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、第1の補正範囲設定部により設定された補正範囲に基づいて第1の画像の欠陥補正処理を行う第1の欠陥補正部と、第2の補正範囲設定部により設定された補正範囲に基づいて第2の画像の欠陥補正処理を行う第2の欠陥補正部とを備える欠陥補正装置である。
【0007】
また、第2の技術は、第1の画像における欠陥画素を検出し、第2の画像における欠陥画素を検出し、第1の画像において検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において検出された欠陥画素により構成される欠陥領域を検出し、第1の画像において検出された欠陥画素および検出された欠陥領域に基づいて第1の画像において欠陥補正を行う範囲を設定し、第2の画像において検出された欠陥画素および検出された欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、設定された補正範囲に基づいて第2の画像について欠陥補正処理を行う欠陥補正方法である。
【0008】
さらに、第3の技術は、光学系を介した光を受光して第1の画像を生成する第1の撮像部と、光学系を介した光を受光して第2の画像を生成する第2の撮像部と、第1の画像における欠陥画素を検出する第1の欠陥検出部と、第2の画像における欠陥画素を検出する第2の欠陥検出部と、第1の画像において、第1の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出するとともに、第2の画像において、第2の欠陥検出部により検出された欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、第1の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、第2の欠陥検出部による検出結果および欠陥領域検出部による検出結果に基づいて第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、第1の補正範囲設定部により設定された補正範囲に基づいて第1の画像の欠陥補正処理を行う第1の欠陥補正部と、第2の補正範囲設定部により設定された補正範囲に基づいて第2の画像の欠陥補正処理を行う第2の欠陥補正部とを備える撮像装置である。
【発明の効果】
【0009】
本技術によれば、3Dの立体感を損なうことなく画像の欠陥の補正を行うことができる。
【図面の簡単な説明】
【0010】
【図1】図1は、従来技術を欠陥補正に適用した場合の問題点を説明するための図である。
【図2】図2は、本技術に係る欠陥補正装置によって行われる欠陥補正の概要を示す説明図である。
【図3】図3は、欠陥補正装置の構成を示すブロック図である。
【図4】図4は、本技術の係る欠陥補正装置を備える撮像装置の構成を示すブロック図である。
【図5】図5は、欠陥補正装置により行われる欠陥補正処理の第1の手法を示すフローチャートである。
【図6】図6は、欠陥補正処理の第1の手法を示すフローチャートである。
【図7】図7は、欠陥補正装置により行われる欠陥補正処理の第2の手法を示すフローチャートである。
【図8】図8は、欠陥補正処理の第2の手法を示すフローチャートである。
【図9】図9は、欠陥補正処理の第2の手法による効果を説明するための図である。
【図10】図10は、欠陥補正装置により行われる欠陥補正処理の第3の手法を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下、本技術の実施の形態について図面を参照しながら説明する。ただし、本技術は以下の実施の形態のみに限定されるものではない。なお、説明は以下の順序で行う。
<1.実施の形態>
[1−1.欠陥補正処理の概要]
[1−2.欠陥補正装置の構成]
[1−3.欠陥補正装置を備える撮像装置の構成]
[1−4.欠陥補正処理の第1の手法]
[1−5.欠陥補正処理の第2の手法]
[1−6.欠陥補正処理の第3の手法]
<2.変形例>
【0012】
<1.実施の形態>
[1−1.欠陥補正処理の概要]
まず、本技術に係る欠陥補正装置によって行われる欠陥補正の概要について図1および図2を参照して説明する。欠陥補正装置は、例えば、イメージャなどの光学撮像系、画像エンジンなどを左目用と右目用とで2つ備え、3次元画像(3D画像)の撮影機能を持つ2眼の撮像装置などに搭載されて用いられる。
【0013】
図1は、本技術を用いずに、左目用画像(以下、L画像10と称する。)と右目用画像(以下、R画像20と称する。)それぞれに独立して欠陥画素に対して補正処理を施した場合の画像を示す図である。
【0014】
ここで、欠陥画素とは、何らかの原因により本来の画像信号ではなく異常な画像信号を出力し、出力画像において画像の断続や不鮮明さなどの画像欠陥を生じさせる欠陥を有する画素のことをいう。欠陥画素は製造時に生じる場合もあれば、撮像装置の使用に伴う経年劣化により生じる場合もある。
【0015】
また、欠陥補正処理は例えば、欠陥画素である補正対象の画素と、その補正対象画素の周囲8方向の正常な画素の平均値とを置き換えることにより行われる。
【0016】
図1上段の2つの画像は欠陥補正処理を施す前のL画像10およびR画像20である。また、図1下段は欠陥補正後のL画像10およびR画像20である。各画像のマス目は画素を表している。また、図1上段において黒色の画素は欠陥画素を表している。さらに、図1下段において、斜線が描かれた画素は補正処理がなされた画素を表している。
【0017】
図1に示されるようにL画像10には複数の小さな欠陥11、11、11と、隣接する複数の欠陥画素からなる大きな欠陥(以下、隣接する複数の欠陥画素からなり、所定サイズ以上のサイズを有する領域を欠陥領域と称する。)である欠陥領域12があり、R画像20には複数の小さな欠陥21、21、21がある。
【0018】
通常の2次元画像(2D)用の欠陥補正処理を3D撮影用の2眼の撮像装置により撮影されたL画像10、R画像20に適用する場合、L画像10、R画像20それぞれに独立して欠陥補正処理が施される。図1上段に示されたL画像10、R画像20のそれぞれに独立して欠陥補正処理を施すと、図1下段の画像に示されるようになる。
【0019】
図1下段からわかるように、L画像10の小さな欠陥11が補正されており、R画像20においても小さな欠陥21が補正されている。また、L画像10には大きな欠陥である欠陥領域12があったため、その欠陥領域12も補正されている。R画像20には欠陥領域は存在しないため、R画像20におけるL画像10の大きな欠陥に対応する範囲22において欠陥補正は行われていない。
【0020】
そうすると、L画像10とR画像20とでは、L画像10の欠陥領域12と、R画像におけるL画像の欠陥領域に対応する範囲22とで大きな相違が生じることとなる。3D画像においてはL画像とR画像の僅かな違いが3Dの立体感に大きな影響を与えるため、図1下段に示されるように、L画像10とR画像20とで大きな相違があると3Dの立体感が損なわれてしまうこととなる。なお、小さな欠陥はL画像とR画像とで個別に欠陥補正を施しても、そのサイズから3Dの立体感を損なうおそれが少ないと考えられる。
【0021】
そこで、本技術に係る欠陥補正装置では、図2に示されるように欠陥補正を行う。図2上段には欠陥補正処理を施す前のL画像10およびR画像20が示されている。図2下段には下段に欠陥補正後のL画像10およびR画像20を示されている。
【0022】
本技術係る欠陥補正装置においても、3Dの立体感を損なうおそれが少ないと考えられる小さな欠陥についてはL画像10とR画像20とで独立して欠陥補正が行われる。一方、L画像10に存在する、隣接する複数の欠陥画素により構成される欠陥領域12は、面積が大きいため、L画像のみについて欠陥補正を行うと、L画像10とR画像20とで大きな違いが生じて、3Dの立体感を損なわれるおそれがある。
【0023】
そこで、L画像10の欠陥領域12について欠陥補正を行うと共に、図2下段に示されるように、R画像20中のL画像の欠陥領域に対応する範囲23も欠陥領域とみなして同様に欠陥補正を行う。これは、R画像20中のL画像10の欠陥領域12に対応する位置に欠陥画素がない場合でも行うようにする。これにより、L画像とR画像とでは同じ位置で欠陥補正が行われるため、L画像10とR画像20に大きな相違点が存在して3Dの立体感が損なわれる、ということを防止することが可能となる。なお、このように、欠陥はないが、欠陥領域とみなされて欠陥補正の対象となる範囲を「みなし欠陥領域」と称する。
【0024】
上記説明はL画像10の欠陥領域12に対応する範囲をR画像中のみなし欠陥領域とする、と説明したが、逆も同様であり、R画像20に欠陥領域がある場合にはそれに対応する範囲がL画像中でみなし欠陥領域となる。
【0025】
[1−2.欠陥補正装置の構成]
図3は、本技術に係る欠陥補正装置100の構成を示すブロック図である。欠陥補正装置100は、例えば、イメージャなどの光学撮像系、画像エンジンなどをL側用とR側用とで2つずつ備える3D画像の撮影機能を持つ2眼の撮像装置などに搭載されて用いられる。
【0026】
欠陥補正装置100は、L側欠陥検出部111、L側欠陥補正部112、L側補正範囲設定部113、R側欠陥検出部121、R側欠陥補正部122、R側補正範囲設定部123、欠陥領域検出部130とから構成されている。これらは、その機能を備える例えば、回路、IC(Integrated Circuit)、マイコンなどにより実現される。また、CPU(Central Processing Unit)、RAM(Random Access Memory)およびROM(Read Only Memory)などからなり、CPUがROMに記憶されたプログラムに従い様々な処理を実行することによって、各部の機能を実現するようにしてもよい。
【0027】
L側欠陥検出部111およびL側欠陥補正部112には左目用画像であるL画像が入力される。R側欠陥検出部121およびR側欠陥補正部122には右目用画像であるR画像が入力される。L画像は例えば、L画像撮影用の光学撮像系および撮像素子によって生成された画像であり、R画像は例えば、R画像撮影用の光学撮像系および撮像素子によって生成された画像である。
【0028】
光学撮像系は、被写体からの光を撮像素子に集光するためのレンズ、レンズを移動させてフォーカス合わせやズーミングを行うための駆動機構、シャッタ機構、アイリス機構などから構成されている。光学撮像系を介して得られた被写体の光画像は、撮像素子上に結像される。
【0029】
撮像素子は、被写体からの入射光を光電変換して電荷量に変換し、画像信号として出力する。撮像素子12から出力された撮像信号はL側欠陥検出部111およびL側欠陥補正部112に出力される。撮像素子としては、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)などが用いられる。
【0030】
L側欠陥検出部111は、L画像を生成する撮像素子において発生する欠陥を検出するものである。欠陥の検出方法としては、種々の公知の検出方法を採用することができる。例えば、検出対象である画素と、その画素の周囲8方向の画素の平均値との比較を行い、その平均値から所定量離間している場合に検出対象の画素は欠陥画素として判定する、という方法がある。
【0031】
また、工場等からの出荷前に撮像素子に対してテストを行い、テストの結果得られた全ての欠陥画素のアドレスを不揮発性メモリ(図示せず。)に格納し、そのアドレスに基づいて欠陥画素を検出するという方法もある。R側欠陥検出部121も同様にして、R画像を生成する撮像素子において発生する欠陥を検出するものである。
【0032】
L側欠陥検出部111により検出された欠陥画素を示すL側欠陥画素情報はL側補正範囲設定部113および欠陥領域検出部130に供給される。R側欠陥検出部121により検出されたR側欠陥画素情報はR側補正範囲設定部123および欠陥領域検出部130に供給される。
【0033】
欠陥領域検出部130は、L側欠陥検出部111から供給された欠陥画素情報に基づいて、L画像において隣接する複数の欠陥画素によって構成される領域を検出する。L画像において隣接する複数の欠陥画素によって構成される領域をL側欠陥領域と称する。また、R側欠陥検出部121から供給された欠陥画素情報に基づいてR画像において隣接する複数の欠陥画素によって構成される領域を検出する。R画像において隣接する複数の欠陥画素によって構成される領域をR側欠陥領域と称する。欠陥領域の検出の詳細については後述する。
【0034】
欠陥領域検出部130は、L画像およびR画像における欠陥領域の位置を示す欠陥領域情報をL側補正範囲設定部113とR側補正範囲設定部123に供給する。
【0035】
L側補正範囲設定部113は、L側欠陥検出部111からの欠陥画素情報および欠陥領域検出部130からの欠陥領域情報に基づいて、L画像における欠陥補正を行う範囲を設定するものである。L画像における補正範囲を示すL側補正範囲情報はL側欠陥補正部112に供給される。
【0036】
R側補正範囲設定部123は、R側欠陥検出部121からの欠陥画素情報および欠陥領域検出部130からの欠陥領域情報に基づいて、R画像における欠陥補正を行う範囲を設定するものである。R画像における補正範囲を示すR側補正範囲情報はR側欠陥補正部122に供給される。なお、欠陥補正を行う範囲決定の詳細については後述する。
【0037】
L側欠陥補正部112は、L側補正範囲設定部113から供給された補正範囲情報に基づいてL画像に対して補正処理を行うものである。補正処理としては種々の公知の補正方法を用いることができる。例えば、欠陥画素である補正対象画素と、その補正対象画素の周囲8方向の正常な画素の平均値とを置き換えることにより行われる。L側欠陥補正部112により欠陥補正処理が施された画像信号、例えば、撮像装置200のカメラ処理部などに供給される。
【0038】
R側欠陥補正部122は、R側補正範囲設定部123から供給された補正範囲情報に基づいてR画像に対して補正処理を行うものである。欠陥補正が施されたL画像およびR画像は欠陥補正装置が適用された撮像装置のカメラ処理部などに供給される。以上のようにして欠陥補正装置が構成されている。
【0039】
[1−3.欠陥補正装置を備える撮像装置の構成]
上述のように構成された欠陥補正装置100は、イメージャなどの光学撮像系、画像エンジンなどを左目用と右目用とで2つずつ備える3D画像の撮影機能を持つ2眼の撮像装置200に搭載されて用いられる。図4は欠陥補正装置の機能を備え、3D撮影機能を持つ撮像装置200の構成を示すブロック図である。
【0040】
撮像装置200は、L画像を撮影するための、L側光学撮像系211、L側撮像素子212、L側タイミングジェネレータ213、L側前処理回路214、L側カメラ処理回路215を備える。また、R画像を撮影するためのR側光学撮像系221、R側撮像素子222、R側タイミングジェネレータ223、R側前処理回路224、R側カメラ処理回路225を備える。さらに、制御部231、3D画像圧縮部232、記憶部233、表示部234、入力部235を備える。
【0041】
また、欠陥補正装置を構成する、L側欠陥検出部111、L側欠陥補正部112、L側補正範囲設定部113、R側欠陥検出部121、R側欠陥補正部122、R側補正範囲設定部123、欠陥領域検出部130も備える。
【0042】
L側光学撮像系211は、被写体からの光を撮像素子に集光するためのレンズ、レンズを移動させてフォーカス合わせやズーミングを行うための駆動機構、シャッタ機構、アイリス機構などから構成されている。これらは制御部231からの制御信号に基づいて駆動される。L側光学撮像系211を介して得られた被写体の光画像は、撮像デバイスとしてのL側撮像素子212上に結像される。
【0043】
L側撮像素子212は、L側タイミングジェネレータ213から出力されるタイミング信号に基づいて駆動され、被写体からの入射光を光電変換して電荷量に変換し、画像信号として出力する。L側撮像素子212から出力される画像信号はL側欠陥補正部112およびL側欠陥検出部111に供給される。L側撮像素子212としては、CCD、CMOSなどが用いられる。L側タイミングジェネレータ213は、制御部231の制御に従いL側撮像素子212に対してタイミング信号を出力する。
【0044】
L側欠陥補正部112により欠陥補正処理が施された画像信号はL側前処理回路214に供給される。L側前処理回路214は、画像信号に対して、CDS(Correlated Double Sampling)処理によりS/N(Signal/Noise)比を良好に保つようにサンプルホールドなどを行う。さらに、AGC(Auto Gain Control)処理により利得を制御し、A/D(Analog/Digital)変換を行ってデジタル画像データを出力する。
【0045】
L側カメラ処理回路215は、前処理回路からの画像データに対して、ホワイトバランス調整処理や色補正処理、ガンマ補正処理、Y/C変換処理、AE(Auto Exposure)処理などの信号処理を施す。L側カメラ処理回路215により所定の処理が施された画像データは3D画像圧縮部232に供給される。
【0046】
R画像を撮影するためのR側光学撮像系221、R側撮像素子222、R側タイミングジェネレータ223、R側前処理回路224、R側カメラ処理回路225は上述したL画像を撮影するための構成と同様のものであるためその説明を省略する。
【0047】
制御部231は、例えばCPU、RAMおよびROMなどから構成されている。ROMには、CPUにより読み込まれ動作されるプログラムなどが記憶されている。RAMは、CPUのワークメモリとして用いられる。CPUは、ROMに記憶されたプログラムに従い様々な処理を実行してコマンドの発行を行うことによって撮像装置200全体の制御を行う。また、制御部231は所定のプログラムを実行することにより、L側補正範囲設定部113、R側補正範囲設定部123および欠陥領域検出部130として機能する。
【0048】
3D画像圧縮部232に供給されたL画像データおよびR画像データは、3D画像圧縮部232においてそれぞれ圧縮され、1つの3D画像ファイルに格納されて最終的に記憶部233に保存される。3D画像ファイルには、3D圧縮画像データとともに、被写体距離情報、視差情報および輻輳角に関する情報などが含まれるようにしてもよい。記憶部233は、例えば、ハードディスク、不揮発性メモリなどの大容量記憶媒体である。
【0049】
表示部234は、例えば、LCD(Liquid Crystal Display)、PDP(Plasma Display Panel)、有機EL(Electro Luminescence)パネルなどにより構成された表示手段である。表示部234には、撮像中のスルー画、記憶部233に記録された画像などが表示される。
【0050】
入力部235は、例えば、電源オン/オフ切り替えのための電源ボタン、撮像画像の記録の開始を指示するためのレリーズボタン、ズーム調整用の操作子、表示部234と一体に構成されたタッチスクリーンなどからなる入力手段である。入力部235に対して入力がなされると、その入力に応じた制御信号が生成されて制御部231に出力される。そして、制御部231はその制御信号に対応した演算処理や制御を行う。
【0051】
なお、図4においては、L画像はL側欠陥補正部112により欠陥補正処理が施された後にL側前処理回路214およびL側カメラ処理回路215で所定の処理が行われるように構成されている。しかし、構成はそれに限られるものではなく、L側前処理回路214およびL側カメラ処理回路215による処理の後にL画像に対してL側欠陥補正部112による欠陥補正が行われるようにしてもよい。R側欠陥補正部122について同様である。
【0052】
[1−4.欠陥補正処理の第1の手法]
次に欠陥補正装置により行われる欠陥補正処理について説明する。図5および図6は欠陥補正処理の第1の手法を示すフローチャートである。
【0053】
まずステップS101で、欠陥補正装置が適用される撮像装置のシャッタを閉じて、L画像、R画像がともに黒画像となるようにする。これにより、欠陥のない画素では画素レベルの値として0レベルが得られ、欠陥画素では画素レベルの値として0レベルより大きな値が得られることとなる。これにより、欠陥画素を検出することができる。
【0054】
次にステップS102で、L側欠陥検出部111は、画素レベルに対する閾値である第1閾値でL画像全体をスキャンし、L画像を構成する全ての画素のうち、第1閾値を超えるレベルを有する画素を検出する。そして、その結果から第1L側マップを作成する。第1L側マップはL画像において第1閾値を超える欠陥画素の位置を示すL側欠陥画素情報に相当するものである。
【0055】
また、ステップS103で、R側欠陥検出部121は、画素レベルに対する閾値である第1閾値でR画像全体をスキャンし、R画像を構成する全ての画素のうち、第1閾値を超えるレベルを有する画素を検出する。そして、その結果から第1R側マップを作成する。第1R側マップはR画像において第1閾値を超える欠陥画素の位置を示すR側欠陥画素情報に相当するものである。なお、L画像をスキャンする際に用いる第1閾値とR画像をスキャンする際に用いられる第1閾値とは同じ値である。
【0056】
次にステップS104で、L側欠陥検出部111は、画素レベルに対する閾値である第2閾値でL画像全体をスキャンし、L画像を構成する全ての画素のうち、第2閾値を超えるレベルを有する画素を検出する。そして、その結果から第2L側マップを作成する。第2L側マップもL画像において第2閾値を超える欠陥画素の位置を示すL側欠陥画素情報に相当するものである。なお、第2閾値は上述した第1閾値よりも小さい値に設定されている。
【0057】
またステップS105で、R側欠陥検出部121は、画素レベルに対する閾値である第2閾値でR画像を全体をスキャンし、R画像を構成する全ての画素のうち、第2閾値を超えるレベルを有する画素を検出する。そして、その結果から第2R側マップを作成する。第2R側マップもR画像において第2閾値を超える欠陥画素の位置を示すR側欠陥画素情報に相当するものである。なお、L画像をスキャンする際に用いる第2閾値とR画像をスキャンする際に用いられる第2閾値とは同じ値である。
【0058】
L側欠陥画素情報である第1L側マップ、第2L側マップは欠陥領域検出部130およびL側補正範囲設定部113に供給される。また、R側欠陥画素情報である第1R側マップ、第2R側マップは欠陥領域検出部130およびR側補正範囲設定部123に供給される。
【0059】
なお、L側欠陥検出部111とR側欠陥検出部121による処理は並列的に行われる。
また、ステップS102乃至ステップS105を行う順序は上述した順序に限られるものではなく順不同である。第2閾値によるスキャンを第1閾値によるスキャンよりも先に行ってもよい。
【0060】
次にステップS106で、欠陥領域検出部130は、第1L側マップに表された第1閾値を越えたレベルを有する画素(第1欠陥画素と称する。)から一つを抽出する。次にステップS107で、第2L側マップを参照して、第2閾値を越えた画素(第2欠陥画素と称する。)の中に第1欠陥画素に隣接する画素が存在するか否かを判定することにより、隣接する複数の欠陥画素からなる「欠陥領域」を検出する。隣接する欠陥画素が存在する場合には処理はステップS108に進む(ステップS107のYes)。検出結果を示すL側欠陥領域情報はL側補正範囲設定部113に供給される。
【0061】
そしてステップS108で、L側補正範囲設定部113は、L側欠陥領域情報に基づいて、第1閾値超え画素に隣接すると判定された第2閾値超え画素の位置を第1L側マップに追加する。このステップS108は、第2閾値超え画素のうち第1閾値超え画素に隣接するものと、第1閾値超え画素とを一つのマップにまとめようとする処理である。これにより、第1画素と、第1画素に隣接する第2画素とにより構成される欠陥領域が補正範囲として設定される。
【0062】
そして、処理はステップS109に進む。なお、ステップS107で、隣接する画素が存在しないと判定された場合も処理もステップS109に進む(ステップS107のNo)。
【0063】
次にステップS109で、欠陥補正装置は、第1L側マップの全ての第1欠陥画素について上記ステップS106乃至ステップS108の処理が行われたか否かを判定する。全ての第1欠陥画素について処理が行われていない場合には処理はステップS106に進む(ステップS109のNo)。そして、第1L側マップの全ての第1欠陥画素について処理が行われるまでステップS106乃至ステップS109が繰り返される。第1L側マップの全ての第1欠陥画素について上記ステップS106乃至ステップS108の処理が行われた場合、処理はステップS110に進む(ステップS109のYes)。
【0064】
次にステップS110で、欠陥領域検出部130は、第1R側マップに表された第1閾値を越えたレベルを有する画素(第1欠陥画素と称する。)から一つを抽出する。次にステップS111で、第2R側マップを参照して、第2閾値を越えた画素(第2欠陥画素と称する。)の中に第1欠陥画素に隣接する画素が存在するか否かを判定することにより、隣接する複数の欠陥画素からなる「欠陥領域」を検出する。隣接する欠陥画素が存在する場合には処理はステップS112に進む(ステップS110のYes)。検出結果を示す欠陥領域情報はR側補正範囲設定部123に供給される。
【0065】
そして、ステップS110で、R側補正範囲設定部123は、R側欠陥領域情報に基づいて、第1閾値超え画素に隣接すると判定された第2閾値超え画素の位置を第1R側マップに追加する。このステップS110は、第2閾値超え画素のうち第1閾値超え画素に隣接するものと、第1閾値超え画素とを一つのマップにまとめようとする処理である。これにより、第1画素と、第1画素に隣接する第2画素とにより構成される欠陥領域が補正範囲として設定される。
【0066】
そして、処理はステップS113に進む。なお、ステップS111で、隣接する画素が存在しないと判定された場合も処理もステップS113に進む(ステップS111のNo)。
【0067】
次にステップS113で、欠陥補正装置100は、第1R側マップの全ての第1欠陥画素について上記ステップS110乃至ステップS112の処理が行われたか否かを判定する。全ての第1欠陥画素について処理が行われていない場合には処理はステップS110に進む(ステップS113のNo)。そして、第1R側マップの全ての第1欠陥画素について処理が行われるまでステップS110乃至ステップS113が繰り返される。
【0068】
ステップS113で、第1R側マップの全ての第1欠陥画素について上記ステップS110乃至ステップS112の処理が行われたと判定された場合、処理はステップS114に進む。
【0069】
次にステップS114で、L側補正範囲設定部113は、欠陥領域検出部130から供給された欠陥領域情報に示されるR画像の欠陥領域を第1L側マップに追加する。次にステップS115で、R側補正範囲設定部123は、欠陥領域検出部130から供給された欠陥領域情報に示されるL画像の欠陥領域を第1R側マップに追加する。これにより、第1L側マップおよび第1R側マップにそれぞれみなし欠陥領域が追加されることとなる。なお、欠陥領域がない場合にはこの処理は行われない。
【0070】
以上の処理により作成された第1L側マップがL画像において欠陥補正が行われる範囲を示したL側補正範囲情報となる。第1L側マップはL側補正範囲設定部113からL側欠陥補正部112に供給される。また、以上の処理により作成された第1R側マップがRが像において欠陥補正が行われる範囲を示したR側補正範囲情報となる。第1R側マップはR側補正範囲設定部123からR側欠陥補正部122に供給される。
【0071】
そしてステップS116で、L側欠陥補正部112は第1L側マップに基づいてL画像の欠陥補正を行う。また、ステップS117で、R側欠陥補正部122は第1R側マップに基づいてR画像の欠陥補正を行う。
【0072】
第1L側マップには、L画像の欠陥画素、欠陥領域、さらにR画像における欠陥領域に対応するみなし欠陥領域が表されている。また、第1R側マップにはR画像の欠陥画素、欠陥領域、さらにL画像における欠陥領域に対応するみなし欠陥領域が表されている。よって、L側欠陥補正部112が第1L側マップに基づいて欠陥補正を行うことにより、L画像ではL画像の欠陥画素と、L画像の欠陥領域と、R画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。同様に、R側欠陥補正部122が第1R側マップに基づいて補正を行うことにより、R画像ではR画像の欠陥画素とR画像の欠陥領域とL画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。これにより、上述した図2に示されるような欠陥補正が行うことができる。
【0073】
このように、欠陥補正の第1の手法では、第1閾値と、第1閾値より小さな値である第2閾値とを用いる。これにより、第1閾値のみでは孤立した欠陥画素であっても、第2閾値以上の画素レベルの欠陥画素を組み合わせることにより、複数の欠陥画素からなる大きな面積を有する欠陥領域を検出することが可能となる。
【0074】
[1−5.欠陥補正処理の第2の手法]
次に、欠陥補正処理の第2の手法について説明する。図7および図8は、欠陥補正処理の第2の手法を示すフローチャートである。なお、ステップS101乃至ステップS117については第1の手法と同様であるため、説明を省略する。第2の手法は、ステップS201とステップS202を行う点で第1の手法と相違する。
【0075】
ステップS201で、L側補正範囲設定部113は、L画像とR画像の視差量を算出し、その視差量に応じて、第1L側マップのみなし欠陥領域に水平値を加算し、みなし欠陥領域の位置を視差量分ずらす。なお、視差とは、L画像とR画像の各々に含まれる近景被写体の水平方向の位置の差として定義される。視差が大きくなるほど、3D表示される被写体の奥行きが深くなる、すなわち、凹凸の度合いが強くなる。また、視差は、近景のL画像上での画像左端からの距離から、近景のR画像上での画像左端からの距離を引いた差として定義することも可能である。
【0076】
同様に、ステップS202で、R側補正範囲設定部123は、L画像とR画像の視差量を算出し、その視差量に応じて、第1R側マップのみなし欠陥領域に水平値を加算し、みなし欠陥領域の位置を視差量分ずらす。
【0077】
ここで、上述した第2の手法における上述の処理による効果について図9を参照して説明する。図9上段は第2の手法を適用していないL画像10およびR画像20を示すものである。図9下段は第2の手法の適用したL画像10およびR画像20を示すものである。
【0078】
3D映像を構成するL画像10とR画像20とでは視差が生じる。近景撮影など、ピントが合っている被写体が近い場合には視差は大きくなる。視差が大きくなると、図9に示されるように、被写体(図9においては星)30の画像中における位置はL画像10とR画像20とで視差の分ずれている。
【0079】
この状態において、図9のL画像10に示されるように、被写体(星)30に重なるように欠陥領域40が存在する場合、その欠陥領域40の位置をそのままR画像に対応させてR画像20におけるみなし欠陥領域50とすると、R画像20においてはみなし欠陥領域50が星には重ならないこととなる。
【0080】
この状態で、L画像10およびR画像20に欠陥補正処理を施すと、L画像10の被写体(星)30に重なった欠陥領域40の補正が行われる。しかし、R画像20においては、みなし欠陥領域50は被写体(星)30に重なっていないため、被写体(星)30上の領域は欠陥補正されない。そうすると、被写体(星)30にL画像10とR画像20とで差異が生じて、3Dの立体感が損なわれることとなる。
【0081】
そこで、図9下段に示されるように、視差量の分、みなし欠陥領域50をずらすことにより、視差のズレが解消されて、L画像10、R画像20共に、被写体(星)30上で欠陥補正が行われることになる。これにより、L画像10とR画像20とで差異が生じることを防ぐことができる。なお、欠陥画素がピントがあっていない背景などに重なっている場合にはこの第2の手法は用いる必要はない。
【0082】
[1−6.欠陥補正処理の第3の手法]
次に、欠陥補正処理の第3の手法について説明する。まずステップS301で、欠陥補正装置を備える撮像装置のシャッタを閉じて、L、Rともに黒画面とする。これにより、L画像、R画像ともに黒画像となり、欠陥のない画素では画素レベルの値として0レベルが得られ、欠陥画素では画素レベル値として0レベルより大きな値が得られることとなる。これにより、欠陥画素を検出することができる。
【0083】
次にステップS302で、L側欠陥検出部111は、L画像全体をスキャンし、L画像を構成する全ての画素のうち、画素レベルが0以上である画素を検出する。そして、その結果から第3L側マップを作成する。画素レベルが0以上である画素を欠陥画素とする。第3L側マップはL画像における欠陥画素の位置を示すL側欠陥画素情報に相当するものである。
【0084】
次にステップS303で、R側欠陥検出部121は、R画像全体をスキャンし、R画像を構成する全ての画素のうち、画素レベルが0以上である画素を検出する。そして、その結果から第1R側マップを作成する。画素レベルが0以上である画素が欠陥画素である。第3R側マップはR画像における欠陥画素の位置を示すR側欠陥画素情報に相当するものである。
【0085】
次にステップS304で、欠陥領域検出部130は、第1L側マップに基づいてL画像において欠陥画素が所定数以上隣接している領域(以下、欠陥領域と称する。)を検出する。所定数とは例えば、「2×2(4個)」、「3×3(9個)」、「4×4(16個)」などである。検出されたL側欠陥領域を示すL側欠陥領域情報は、欠陥領域検出部130からL側補正範囲設定部113およびR側補正範囲設定部123に供給される。
【0086】
この所定数は、例えば、視差に応じて設定されるようにするとよい。例えば、撮像装置200のズーム倍率、フォーカス位置などに応じて設定されるようにしてもよい。例えば、フォーカス位置、ズーム倍率などに基づいて総合的に近景撮影か、遠景撮影かを判断し、近景の場合には視差が大きいとして「4×4(16個)」以上にする。一方、遠景場合には視差が小さいとして「2×2(4個)」にする、などである。
【0087】
これは、遠景に比べて近景は視差が大きくなるため、L画像、R画像でわずかにでも相違点がある、その相違点により3Dの立体感を損なわせてしまうおそれがあるからである。よって、近景の場合には遠景の場合に比べて欠陥領域として検出する画素の個数(言い換えると欠陥領域の面積)を少なくして、少量の欠陥画素が隣接している領域も欠陥領域としてL画像、R画像で補正する必要がある。
【0088】
次にステップS305で、欠陥領域検出部130は、同様に第1R側マップに基づいてR画像における欠陥領域の検出を行う。検出されたR側欠陥領域を示すR側欠陥領域情報は、欠陥領域検出部130からR側補正範囲設定部123およびL側補正範囲設定部113に供給される。
【0089】
次にステップS306で、L側補正範囲設定部113は、R画像の欠陥領域をみなし欠陥領域として第3L側マップに追加する。補正範囲情報である第3L側マップはL側補正範囲設定部113からL側欠陥補正部112に供給される。
【0090】
また、ステップS307で、R側補正範囲設定部123は、L画像の欠陥領域を第3R側マップに追加する。補正範囲情報である第3R側マップはR側補正範囲設定部123からR側欠陥補正部122に供給される。
【0091】
そして、ステップS308で、L側欠陥補正部112は第3L側マップに基づいてL画像の欠陥補正を行う。また、ステップS309で、R側欠陥補正部122は第3R側マップに基づいてR画像の欠陥補正を行う。
【0092】
第3L側マップには、L画像の欠陥画素、欠陥領域、さらにR画像における欠陥領域に対応したみなし欠陥領域が表されている。また、第3R側マップにはR画像の欠陥画素、欠陥領域、さらにL画像における欠陥領域に対応したみなし欠陥領域が表されている。よって、L側欠陥補正部112が第3L側マップに基づいて補正を行うことにより、L画像ではL画像の欠陥画素と欠陥領域、さらにR画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。同様に、R側欠陥補正部122が第3R側マップに基づいて補正を行うことにより、R画像ではR画像の欠陥画素と欠陥領域、さらにL画像の欠陥領域に対応するみなし欠陥領域について補正が行われる。これにより、上述した図2に示されるような欠陥補正が行われることとなる。
【0093】
<2.変形例>
以上、本技術の一実施の形態について具体的に説明したが、本技術は上述の実施形態に限定されるものではなく、本技術の技術的思想に基づく各種の変形が可能である。
【0094】
本技術は3D画像の撮影機能を持つ2眼のデジタルスチルカメラ、3Dの動画撮影が可能な2眼おデジタルビデオカメラにも適用することが可能である。
【0095】
なお、本技術は以下のような構成も取ることができる。
【0096】
(1)第1の画像における欠陥画素を検出する第1の欠陥検出部と、
第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
欠陥補正装置。
【0097】
(2)前記欠陥領域検出部は、隣接する複数の欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)に記載の欠陥補正装置。
【0098】
(3)前記第1の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
前記(1)または(2)に記載の欠陥補正装置。
【0099】
(4)前記第1の補正範囲設定部は、前記第1の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を前記第1の画像において欠陥補正を行う範囲として設定する
前記(1)から(3)のいずれかに記載の欠陥補正装置。
【0100】
(5)前記第1の欠陥画素検出部は、第1の閾値と前記第1の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第1の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)から(4)のいずれかに記載の欠陥補正装置。
【0101】
(6)前記第1の補正範囲設定部は、前記第1の画像における、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
前記(1)から(5)のいずれかに記載の欠陥補正装置。
【0102】
(7)前記第2の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
前記(1)から(6)のいずれかに記載の欠陥補正装置。
【0103】
(8)前記第2の補正範囲設定部は、前記第2の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を前記第2の画像において欠陥補正を行う範囲として設定する
前記(1)から(7)のいずれかに記載の欠陥補正装置。
【0104】
(9)前記第2の欠陥画素検出部は、第1の閾値と前記第2の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第2の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
前記(1)から(8)のいずれかに記載の欠陥補正装置。
【0105】
(10)前記第2の補正範囲設定部は、前記第2の画像における、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
前記(1)から(9)のいずれかに記載の欠陥補正装置。
【0106】
(11)第1の画像における欠陥画素を検出し、
第2の画像における欠陥画素を検出し、
前記第1の画像において検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において検出された前記欠陥画素により構成される欠陥領域を検出し、
前記第1の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第1の画像において欠陥補正を行う範囲を設定し、
前記第2の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、
設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、
設定された補正範囲に基づいて前記第2の画像について欠陥補正処理を行う
欠陥補正方法。
【0107】
(12)光学系を介した光を受光して第1の画像を生成する第1の撮像部と、
光学系を介した光を受光して第2の画像を生成する第2の撮像部と、
前記第1の画像における欠陥画素を検出する第1の欠陥検出部と、
前記第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
を備える撮像装置。
【符号の説明】
【0108】
100・・・・欠陥補正装置
111・・・・L側欠陥検出部
112・・・・L側欠陥補正部
113・・・・L側補正範囲設定部
121・・・・R側欠陥検出部
122・・・・R側欠陥補正部
123・・・・R側補正範囲設定部
130・・・・欠陥領域検出部
200・・・・撮像装置
212・・・・L側撮像素子
222・・・・R側撮像素子
【特許請求の範囲】
【請求項1】
第1の画像における欠陥画素を検出する第1の欠陥検出部と、
第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
欠陥補正装置。
【請求項2】
前記欠陥領域検出部は、隣接する複数の欠陥画素からなる領域を前記欠陥領域として検出する
請求項1に記載の欠陥補正装置。
【請求項3】
前記第1の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項4】
前記第1の補正範囲設定部は、前記第1の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を前記第1の画像において欠陥補正を行う範囲として設定する
請求項3に記載の欠陥補正装置。
【請求項5】
前記第1の欠陥画素検出部は、第1の閾値と前記第1の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第1の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
請求項2に記載の欠陥補正装置。
【請求項6】
前記第1の補正範囲設定部は、前記第1の画像における、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項7】
前記第2の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項8】
前記第2の補正範囲設定部は、前記第2の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を前記第2の画像において欠陥補正を行う範囲として設定する
請求項7に記載の欠陥補正装置。
【請求項9】
前記第2の欠陥画素検出部は、第1の閾値と前記第2の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第2の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
請求項2に記載の欠陥補正装置。
【請求項10】
前記第2の補正範囲設定部は、前記第2の画像における、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項11】
第1の画像における欠陥画素を検出し、
第2の画像における欠陥画素を検出し、
前記第1の画像において検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において検出された前記欠陥画素により構成される欠陥領域を検出し、
前記第1の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第1の画像において欠陥補正を行う範囲を設定し、
前記第2の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、
設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、
設定された補正範囲に基づいて前記第2の画像について欠陥補正処理を行う
欠陥補正方法。
【請求項12】
光学系を介した光を受光して第1の画像を生成する第1の撮像部と、
光学系を介した光を受光して第2の画像を生成する第2の撮像部と、
前記第1の画像における欠陥画素を検出する第1の欠陥検出部と、
前記第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
を備える撮像装置。
【請求項1】
第1の画像における欠陥画素を検出する第1の欠陥検出部と、
第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
欠陥補正装置。
【請求項2】
前記欠陥領域検出部は、隣接する複数の欠陥画素からなる領域を前記欠陥領域として検出する
請求項1に記載の欠陥補正装置。
【請求項3】
前記第1の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項4】
前記第1の補正範囲設定部は、前記第1の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を前記第1の画像において欠陥補正を行う範囲として設定する
請求項3に記載の欠陥補正装置。
【請求項5】
前記第1の欠陥画素検出部は、第1の閾値と前記第1の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第1の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
請求項2に記載の欠陥補正装置。
【請求項6】
前記第1の補正範囲設定部は、前記第1の画像における、前記欠陥領域検出部により検出された前記第2の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項7】
前記第2の補正範囲設定部は、さらに、前記欠陥領域検出部により検出された前記第1の画像における前記欠陥領域に基づいて欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項8】
前記第2の補正範囲設定部は、前記第2の画像における欠陥画素と、前記欠陥領域検出部により検出された前記第2の画像における前記欠陥領域と、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を前記第2の画像において欠陥補正を行う範囲として設定する
請求項7に記載の欠陥補正装置。
【請求項9】
前記第2の欠陥画素検出部は、第1の閾値と前記第2の画像の画素レベルとを比較し、さらに、前記第1の閾値より小さい値に設定された第2の閾値と前記第2の画像の画素レベルとを比較し、前記第1の閾値または前記第2の閾値以上画素レベルを有する画素を欠陥画素として検出し、
前記欠陥領域検出部は、前記第1の閾値以上の画素レベルを有する欠陥画素と、該第1の閾値以上の画素レベルを有する欠陥画素に隣接する前記第2の閾値以上の画素レベルを有する欠陥画素からなる領域を前記欠陥領域として検出する
請求項2に記載の欠陥補正装置。
【請求項10】
前記第2の補正範囲設定部は、前記第2の画像における、前記欠陥領域検出部により検出された前記第1の画像の前記欠陥領域に対応する範囲を、前記第1の画像と前記第2の画像の視差の分ずらして欠陥補正を行う範囲を設定する
請求項1に記載の欠陥補正装置。
【請求項11】
第1の画像における欠陥画素を検出し、
第2の画像における欠陥画素を検出し、
前記第1の画像において検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において検出された前記欠陥画素により構成される欠陥領域を検出し、
前記第1の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第1の画像において欠陥補正を行う範囲を設定し、
前記第2の画像において検出された前記欠陥画素および検出された前記欠陥領域に基づいて前記第2の画像において欠陥補正を行う範囲を設定し、
設定された補正範囲に基づいて前記第1の画像について欠陥補正処理を行い、
設定された補正範囲に基づいて前記第2の画像について欠陥補正処理を行う
欠陥補正方法。
【請求項12】
光学系を介した光を受光して第1の画像を生成する第1の撮像部と、
光学系を介した光を受光して第2の画像を生成する第2の撮像部と、
前記第1の画像における欠陥画素を検出する第1の欠陥検出部と、
前記第2の画像における欠陥画素を検出する第2の欠陥検出部と、
前記第1の画像において、前記第1の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出するとともに、前記第2の画像において、前記第2の欠陥検出部により検出された前記欠陥画素により構成される欠陥領域を検出する欠陥領域検出部と、
前記第1の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第1の画像において欠陥補正を行う範囲を設定する第1の補正範囲設定部と、
前記第2の欠陥検出部による検出結果および前記欠陥領域検出部による検出結果に基づいて前記第2の画像において欠陥補正を行う範囲を設定する第2の補正範囲設定部と、
前記第1の補正範囲設定部により設定された補正範囲に基づいて前記第1の画像の欠陥補正処理を行う第1の欠陥補正部と、
前記第2の補正範囲設定部により設定された補正範囲に基づいて前記第2の画像の欠陥補正処理を行う第2の欠陥補正部と
を備える
を備える撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−98920(P2013−98920A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242517(P2011−242517)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]