
止水剤注入装置及び止水剤注入方法
【課題】部屋内への止水剤の注入を容易に行うことができる止水剤注入装置を提供する。
【解決手段】止水剤注入装置30では、ガイドローラ35を設けた支持部材36が、クローラ14Bを取り付けた車台31の上面に固定されており、ガイドローラ33を設けた支持部材34が、支持部材36の後方で車台31にスライド可能に取り付けられる。複数のガイドパイプを関節機構で連結して先端部に注入ノズル51が設けられた、止水剤を供給する多関節ガイドパイプ32が、ガイドロー34とガイドローラ33の間にまたがって敷設され、ガイドローラ33の外面に沿って反転され、反転された端部が車台31の上面に設置されたガイドパイプ制御装置37のケースに接続される。車台31に取り付けられた支持部材移動装置により、支持部材34が車台31の長手方向に移動され、注入ノズル51が上下動される。
【解決手段】止水剤注入装置30では、ガイドローラ35を設けた支持部材36が、クローラ14Bを取り付けた車台31の上面に固定されており、ガイドローラ33を設けた支持部材34が、支持部材36の後方で車台31にスライド可能に取り付けられる。複数のガイドパイプを関節機構で連結して先端部に注入ノズル51が設けられた、止水剤を供給する多関節ガイドパイプ32が、ガイドロー34とガイドローラ33の間にまたがって敷設され、ガイドローラ33の外面に沿って反転され、反転された端部が車台31の上面に設置されたガイドパイプ制御装置37のケースに接続される。車台31に取り付けられた支持部材移動装置により、支持部材34が車台31の長手方向に移動され、注入ノズル51が上下動される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、止水剤注入装置及び止水剤注入方法に係り、特に、原子力プラントにおいて用いるのに好適な止水剤注入装置及び止水剤注入方法に関する。
【背景技術】
【0002】
管路における漏水箇所に対する止水剤を用いた止水方法が、特開昭63−149496号公報及び特公平7−111237号公報に記載されている。
【0003】
特開昭63−149496号公報は、下水管路の補修工法を記載している。この補修工法では、下水管路内に挿入されるエアパッカーに接続されたエアホースが、地上に存在する止水車に接続されており、エアパッカーを下水管路内に挿入して下水管路の破損部まで移動させ、止水車からエアホースを通してエアパッカー内に空気を供給してエアパッカーの外面が下水管路の内面に接触するまでエアパッカーを膨らませる。このとき、下水管路の破損部がエアパッカーの外面に形成される窪みの部分に対向している。止水車で生成した止水剤を、グラウトホースを通してその窪みの部分に供給し、下水管路の破損部を止水剤で補修する。
【0004】
特公平7−111237号公報は電力管路の止水工法を記載している。この止水工法も、特開昭63−149496号公報と同様にパッカーを用いている。パッカーを電力管路内に挿入して電力管路の浸水箇所をパッカーの一対のパッカー部の間に位置させる。グラウト材(止水剤)を一対のパッカー部の間に供給してグラウト材を電力管路の浸水箇所内に注入し、この浸水箇所の止水を行う。
【0005】
特開2006−57405号公報は、地盤内に設置されて開削立坑を取り囲む土留壁の漏水部を止水する止水工法を記載している。土留壁の漏水部近傍の地盤内にボーリングにより掘削孔を形成し、掘削孔内に注入管を挿入する。注入管の上端は、硬化材供給装置に接続される。注入管には袋体が取り付けられている。硬化材供給装置から注入管内に注入された硬化材は袋体内に注入される。硬化材が注入された袋体は、硬化材の注入圧力によって注入管から外れて落下し、土留壁の漏水部近傍から地盤内に形成された隙間を埋めていく。このようにして、土留壁の漏水が防止される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭63−149496号公報
【特許文献2】特公平7−111237号公報
【特許文献3】特開2006−57405号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特開昭63−149496号公報、特公平7−111237号公報及び特開2006−57405号公報では、作業員が漏水箇所の近くで地面に形成された形成された掘削孔まで近づき、止水剤を注入する注入管路を、掘削孔を通して止水箇所まで挿入し、止水剤を止水箇所に注入することができる。
【0008】
しかしながら、原子力プラントが設置された建屋内の部屋において止水を行うことは、放射性環境下での止水作業になり、作業員が近づけないためその止水作業は困難を伴う。このため、遠隔で操作が可能な止水剤注入装置の使用が望まれるが、止水剤注入状況の監視、寸法上の制約を受ける領域での止水を行う部屋内への止水剤の注入を実現することが必要となる。
【0009】
本発明の目的は、部屋内への止水剤の注入を容易に行うことができる止水剤注入装置及び止水剤注入方法を提供することにある。
【課題を解決するための手段】
【0010】
上記した目的を達成する本発明の特徴は、第1ガイドローラが取り付けられ、一対のクローラを取り付けた車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、車台に取り付けられ、第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を注入ノズルに供給する止水剤供給通路が内部に形成され、第1ガイドローラ及び第2ガイドローラにまたがって敷設されて第2ガイドローラに沿って反転され、反転された端部が車台に取り付けられる多関節ガイドパイプと、車台に設けられ、多関節ガイドパイプのその反転された端部に接続されて止水剤供給通路に連絡される止水剤供給管路とを備えたことにある。
【0011】
車台に固定された第1支持部材に設けた第1ガイドローラと車台の長手方向において移動可能に車台に取り付けられた第2支持部材に設けた第2ガイドローラにまたがって、先端部に注水ノズルを設けた多関節ガイドパイプを敷設し、車台に設けた支持部材移動装置によって支持部材をその長手方向に移動させるため、止水剤注入装置の高さを低くすることができる。止水対象の部屋の上の階に存在する部屋の高さが低くても止水剤注入装置を止水対象の部屋の上の階に存在する部屋内に容易に搬入することができる。また、支持部材移動装置によって第2支持部材を車台の長手方向に移動させて、多関節ガイドパイプの先端部に設けられた注水ノズルを、止水対象の部屋の天井に形成された開口部を通して止水対象の部屋内に挿入することができ、この部屋内で注水ノズルを上昇させることができる。このため、止水対象の部屋内への止水剤の注入を容易に行うことができる。
【発明の効果】
【0012】
本発明によれば、部屋内への止水剤の注入を容易に行うことができる。
【図面の簡単な説明】
【0013】
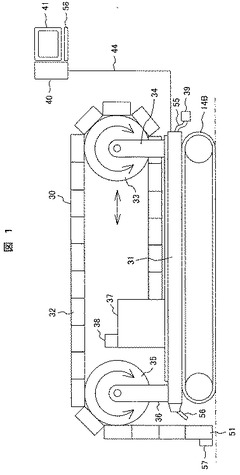
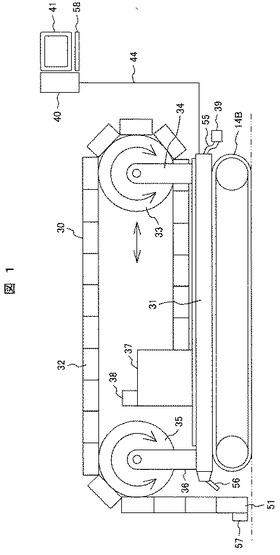
【図1】本発明の好適な一実施例である止水剤注入装置の構成図である。
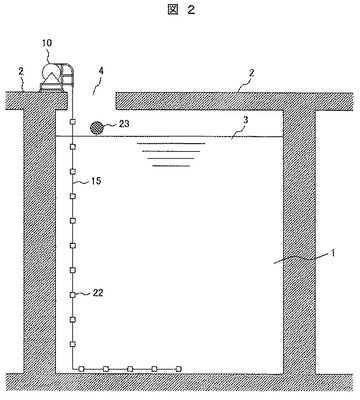
【図2】止水を行う部屋の天井上方の床面上にセンサ挿入装置を置いた状態を示す説明図である。
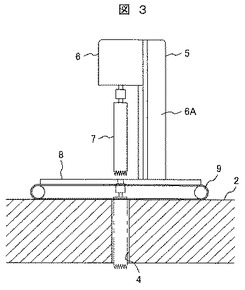
【図3】図2に示す部屋の天井に孔を明けるボーリング装置の側面図である。
【図4】図3に示すボーリング装置の正面図である。
【図5】図2に示す部屋の天井に形成された孔の位置を示す説明図である。
【図6】図2に示すセンサ挿入装置の側面図である。
【図7】図2に示すセンサ挿入装置の正面図である。
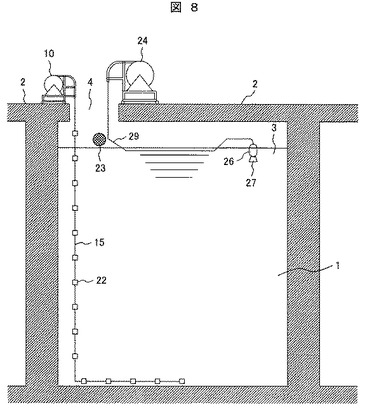
【図8】止水を行う部屋の天井上方の床面上にセンサ挿入装置と共に遠隔操作無人探査機挿入装置を置いた状態を示す説明図である。
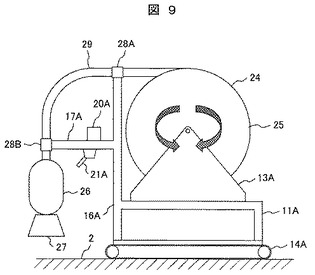
【図9】図8に示す遠隔操作無人探査機挿入装置の側面図である。
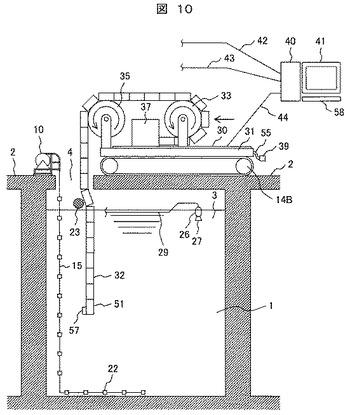
【図10】止水を行う部屋の天井上面である床面上に止水剤注入装置を置いた状態を示す説明図である。
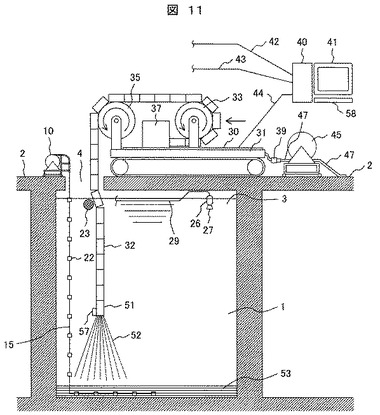
【図11】図10に示す止水剤注入装置にホース接続装置を接続し、止水剤注入装置により部屋に止水剤を注入している状態を示す説明図である。
【図12】図11に示すホース接続装置の側面図である。
【図13】止水剤注入装置により注入された止水剤が部屋内に溜まっていく状態を示す説明図である。
【図14】部屋内への止水剤の注入が完了した状態を示す説明図である。
【図15】止水を行う部屋の天井上方の床面上から止水剤注入装置を撤去した状態を示す説明図である。
【発明を実施するための形態】
【0014】
本発明の実施例を以下に説明する。
【実施例】
【0015】
本発明の好適な一実施例である止水剤注入装置を、図1を用いて説明する。
【0016】
本実施例の止水剤注入装置30は、クローラ14B、車台31、多関節ガイドパイプ32、ガイドローラ33,35、ガイドパイプ制御装置(第2制御装置)37及び制御装置(第1制御装置)40を備える。一対のクローラ14Bが、車台31の下方で車台31の両脇に配置され、車台31を支持している。支持部材(第1支持部材)36が車台31の前方で車台31の上面に固定されている。ガイドローラ(第1ガイドローラ)35が支持部材に回転可能に取り付けられている。支持部材(第2支持部材)34が、支持部材36よりも後方に配置され、車台31にスライド可能に取り付けられる。ガイドローラ(第2ガイドローラ)33が支持部材34に回転可能に取り付けられている。支持部材34を車台31の長手方向に移動させる支持部材移動装置(図示せず)が、車台31に取り付けられている。ガイドパイプ制御装置37が支持部材34と支持部材36の間に配置され、車台31の上面に取り付けられる。
【0017】
多関節ガイドパイプ32は、複数のガイドパイプのそれぞれを相互に関節機構により曲るように連結されて構成されている。先端部に注入ノズル51を設けた多関節ガイドパイプ32が、ガイドロー34とガイドローラ33の間にまたがって敷設され、ガイドロー34,33のそれぞれの外面に接触している。多関節ガイドパイプ32は、ガイドローラ33の外面に沿って反転され、反転された端部が車台31の上面に設置されたガイドパイプ制御装置37のケース(図示せず)に接続されている。多関節ガイドパイプ32の反転された端部は、ガイドパイプ制御装置37のケースを介して車台31に固定される。反転された端部から注水ノズル51に向かう止水剤供給通路が、多関節ガイドパイプ32内に形成されている。位置センサ38がガイドパイプ制御装置37のケースに設置される。先端部に連結カプラ39が取り付けられた止水剤供給ホース55が、車台31に取り付けられて車台31に沿って伸びており、ガイドパイプ制御装置37のケース内でおいて多関節ガイドパイプ32に接続される。
【0018】
カメラ56が車台31の前面に取り付けられ、カメラ57が注入ノズル51に取り付けられる。第1照明(図示せず)がカメラ56の近くで車台31に取り付けられ、第2照明(図示せず)がカメラ57の近くで注入ノズル51に取り付けられる。カメラ56,57は制御装置40にケーブル(図示せず)により接続され、表示装置41及び入力装置58が制御装置40に接続される。制御装置40に接続されたケーブル44が、車台31に取り付けられる。
【0019】
止水剤注入装置30を用いて行われる止水剤注入方法を、図2〜図15を用いて以下に具体的に説明する。止水の対象は、原子力プラントが設置された建屋内の或る部屋1であり(図2参照)、この部屋1の内部には放射性物質を含む水3が溜まっている。部屋1内の放射性物質を含む水3は、部屋1内に配置された配管(図示せず)から漏洩している可能性がある。本実施例では、部屋1内部の空間に止水剤を注入するために、止水剤注入装置30を用いた止水作業が行われる。
【0020】
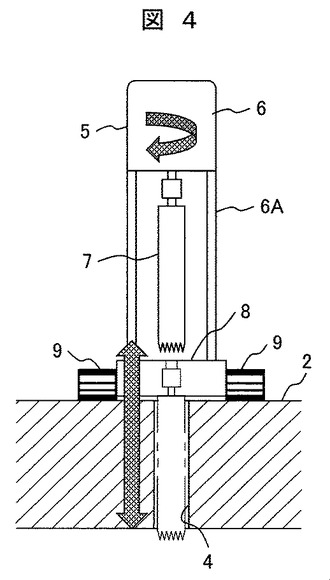
この止水作業を行うにあったって、まず、部屋1の天井には開口部4が形成される。開口部4の形成について詳細に説明する。部屋1の天井の上、すなわち、部屋1の上方に存在する別の部屋の床面2に、ボーリング装置5が置かれる(図3参照)。ボーリング装置5は、図3及び図4に示すように、車台8、一対のキャタピラ9、ボーリングヘッド6、スタンド6A及びドリル(またはホールソー)7を有する。キャタピラ9が車台8の両脇に回転可能に設けられ、クローラ8がそれぞれ取り付けられ、スタンド6Aが車台の上面に取り付けられている。ドリル回転モータ(図示せず)及びボーリングヘッド昇降装置(図示せず)が設けられるボーリングヘッド6が、スタンド6Aに上下方向に移動可能に設けられる。ドリル7が、ボーリングヘッド6に設けられたドリル回転モータに連結され、ボーリングヘッド6から下方に向かって伸びている。
【0021】
ボーリング装置5を、建屋の外部から建屋の内部を通ってこの建屋内に存在する部屋1の上方に位置する床面2まで移動させる。さらに、ドリル7が開口部4を形成する位置の真上になるように、キャタピラ9を旋回させてボーリング装置5を床面2に沿って移動させる。ボーリング装置5を移動する際に、オペレータが入力装置58にボーリング装置5の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第1開閉器(図示せず)を操作することにより、車台8に設けられた、キャタピラ9を旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。ボーリング装置5に設置されたカメラ(図示せず)で撮影された、ボーリング装置5付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってボーリング装置5が存在する位置を把握することができる。
【0022】
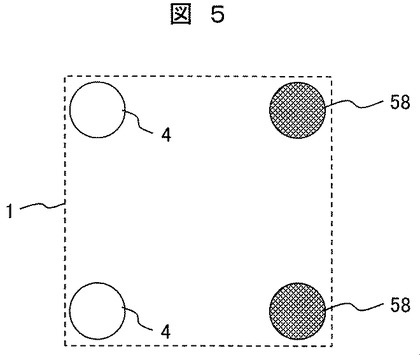
床面2に形成される開口部4の位置は、図5に示すように、部屋1の2つの隅付近の2箇所である。ドリル回転モータによりドリル7を回転させながらボーリングヘッド昇降装置によりボーリングヘッド6を下降させ、部屋1のコンクリート製の天井にドリル7により孔を明けてその天井に開口部4を形成する。ドリル回転モータ及びボーリングヘッド昇降装置のそれぞれの駆動、停止も、制御装置40からの制御指令により行われる。
【0023】
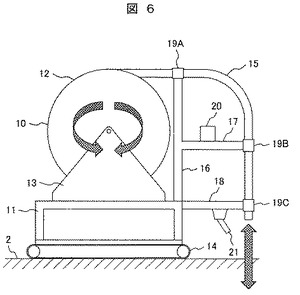
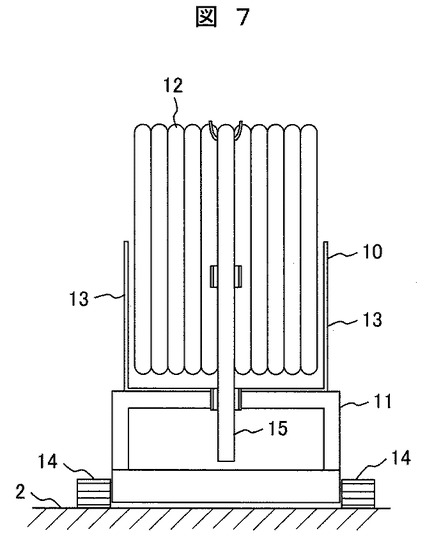
開口部4の側の床面2上に、センサ挿入装置10が置かれる(図2参照)。センサ挿入装置10は、図6及び図7に示すように、車台11、電動ドラム12、一対のクローラ14及びケーブル15を有する。各クローラ14が車台11の両脇に回転可能に設置されている。電動ドラム12が、車台11の上面に取り付けられた一対の支持部材13の間に配置され、これらの支持部材13に回転可能に取り付けられる。ケーブル15が電動ドラム12に巻き付けられている。ケーブル15は、また、ケーブル支持部材である支持部材16,17,18に保持される。上方に向かって垂直に伸びる支持部材16が、車台11の上面に取り付けられる。水平方向において平行に配置された支持部材17及び18が、支持部材16に取り付けられる。ケーブルガイド19Aが支持部材16の先端部に、ケーブルガイド19Bが支持部材17の先端部に、ケーブルガイド19Cが支持部材18の先端部にそれぞれ取り付けられる。電動ドラム12に巻き付けられたケーブル15がケーブルガイド19A,19B,19Cによって保持されてガイドされる。位置センサ20が支持部材17に設置され、カメラ21が支持部材18に設置される。第3照明(図示せず)がカメラ21の側で支持部材18に設置される。
【0024】
センサ挿入装置10を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14を回転させてセンサ挿入装置10を床面2に沿って移動させ、センサ挿入装置10を開口部4の近くで床面2上に配置する(図2参照)。センサ挿入装置10を移動させるとき、オペレータが入力装置58にセンサ挿入装置10の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第2開閉器(図示せず)を操作することにより、車台11に設けられた、クローラ14を旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。センサ挿入装置10に設置されたカメラ21で撮影された、センサ挿入装置10付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってセンサ挿入装置10が存在する位置を把握することができる。
【0025】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム12が回転され、ケーブル15が電動ドラム12から巻き戻される。巻き戻されたケーブル15は、ケーブルガイド19A,19B,19Cによって案内され、開口部4を通して部屋1内に下降される。ケーブル15が開口部4内に挿入される状態は、第3照明が点灯されてカメラ21で撮影され、得られた映像を表示装置41に表示することにより監視される。ケーブル15には複数の圧力センサ(または温度センサ)22が所定の間隔(例えば、10cm)で取り付けられている(図2参照)。複数の圧力センサ22が取り付けられたケーブル15は、部屋1内の水3中を下降して、やがて、部屋1の底面に達する。ケーブル15は部屋1の底面に沿って曲げられ、ケーブル15の一部は複数の圧力センサ22を取り付けた状態でその底面上に配置される(図2参照)。そして、所定長さのケーブル15が開口部4から部屋1内に挿入されたとき、制御装置40からの制御指令により電動ドラム12の回転が停止される。ケーブル15に取り付けられた各圧力センサ(または温度センサ)22はケーブル15内の芯線にそれぞれ接続されており、ケーブル15の電導ドラム12側の端部でケーブル15の芯線が制御装置40に接続されたケーブル42の芯線に接続されている(図10参照)。この結果、各圧力センサ(または温度センサ)22は制御装置40に接続される。
【0026】
遠隔操作無人探査機挿入装置24が、図8に示すように、開口部4付近で床面2上に置かれる。遠隔操作無人探査機挿入装置24は、図9に示すように、車台11A、電動ドラム25、一対のクローラ14A及びケーブル29を有する。各クローラ14Aが車台11Aの両脇に回転可能に設置されている。電動ドラム25が、車台11Aの上面に取り付けられた一対の支持部材13Aの間に配置され、これらの支持部材13Aに回転可能に取り付けられる。ケーブル29が電動ドラム25に巻き付けられている。ケーブル29は、また、ケーブル支持部材である支持部材16A,17Aに保持される。上方に向かって垂直に伸びる支持部材16Aが、車台11Aの上面に取り付けられる。水平方向に伸びる支持部材17Aが、支持部材16Aに取り付けられる。ケーブルガイド28Aが支持部材16Aの先端部に、ケーブルガイド28Bが支持部材17Aの先端部にそれぞれ取り付けられる。電動ドラム25に巻き付けられたケーブル29がケーブルガイド28A,28Bによって保持されてガイドされる。ケーブル29の先端が遠隔操作無人探査機26に接続され、超音波センサ27が遠隔操作無人探査機26に取り付けられる。位置センサ20A及びカメラ21Aが支持部材17Aに設置され、第4照明(図示せず)がカメラ21Aの側で支持部材17Aに設置される。
【0027】
遠隔操作無人探査機挿入装置24を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14Aを回転させて遠隔操作無人探査機挿入装置24を床面2に沿って移動させ、遠隔操作無人探査機挿入装置24を開口部4の近くで床面2上に配置する(図8参照)。遠隔操作無人探査機挿入装置24を移動させる際には、オペレータが入力装置58に遠隔操作無人探査機挿入装置24の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第3開閉器(図示せず)を操作することにより、車台11Aに設けられた、クローラ14Aを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。遠隔操作無人探査機挿入装置24に設置されたカメラ21Aで撮影された、遠隔操作無人探査機挿入装置24付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによって遠隔操作無人探査機挿入装置24が存在する位置を把握することができる。
【0028】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム25が回転され、ケーブル29が電動ドラム25から巻き戻される。巻き戻されたケーブル29は、ケーブルガイド28A,28Bによって案内され、開口部4を通して部屋1内に下降される。この開口部4には、ケーブル15も挿入されている。ケーブル29に接続された遠隔操作無人探査機26及び超音波センサ27も、下降されて、開口部4を通して部屋1内に達する。部屋1内の水3の水面上方で部屋1の天井より下方で、開口部4付近に障害物(他の構造部材)23が存在する。このため、遠隔操作無人探査機26及び超音波センサ27は障害物23を避けて下降される。
【0029】
遠隔操作無人探査機26は、水3の水面上を移動してケーブル29が挿入された開口部4に近い、部屋1の側壁の側にある位置58(図5参照)まで移動される。部屋1の4隅のうちの1つの隅に位置するこの位置58では、開口部4を部屋1の天井に形成することができない。遠隔操作無人探査機26を位置58に位置させることにより、遠隔操作無人探査機26に取り付けられた超音波センサ27も位置58に配置される。部屋1内における遠隔操作無人探査機26の移動によって、電導ドラム25に巻き付けられたケーブル29が、電導ドラム25から引き出される。
【0030】
超音波センサ27はケーブル29の芯線に接続され、ケーブル29の電導ドラム25側の端部でケーブル29の芯線が制御装置40に接続されたケーブル43の芯線に接続されている(図10参照)。この結果、超音波センサ27は制御装置40に接続される。
【0031】
止水剤注入装置30を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、止水剤注入装置30が、図10に示すように、開口部4付近で床面2上に置かれる。止水剤注入装置30を移動させるとき、オペレータが入力装置58に止水剤注入装置30の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第4開閉器(図示せず)を操作することにより、車台31に設けられた、クローラ14Bを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。車台31に設置されたカメラ56で撮影された、止水剤注入装置30付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによって止水剤注入装置30が存在する位置を把握することができる。止水剤注入装置30が開口部4の近くに到達したとき、クローラ14Bの旋回が停止されて止水剤注入装置30の移動が停止される。
【0032】
その後、注水ノズル51が開口部4を通して部屋1内に挿入される。注水ノズル51の開口部4内への挿入は、ガイドローラ33を支えている支持部材34をガイドパイプ制御装置37に向かって移動させることにより行われる。すなわち、オペレータが入力装置58に入力したガイドパイプ駆動指令が、制御装置40に入力される。このガイドパイプ駆動指令に基づいて制御装置40が出力した制御指令が、ケーブル44により支持部材移動装置に伝えられる。この制御指令により、支持部材移動装置は、支持部材34をガイドパイプ制御装置37側に移動させる。支持部材34のこの移動によって、ガイドローラ33の回転中心とガイドローラ35の回転中心との間の距離が短くなり、注入ノズル51が開口部4内を通って部屋1内の水3の中を徐々に下降する。支持部材34のガイドパイプ制御装置37側への移動距離の実質2倍の長さだけ、注入ノズル51が下降することになる。
【0033】
注水ノズル51に取り付けられたカメラ57で撮影された映像も表示装置41に表示される。開口部4の下方に障害物23が存在するため、注水ノズル51はこの障害物23を避けて下降させる必要がある。表示装置41に表示された、カメラ57で撮影された映像を監視していたオペレータが、注水ノズル51が障害物23付近に到達することを知ったとき、オペレータが入力装置58に障害物回避指令を制御装置40に入力する。この障害物回避指令を入力した制御装置40が、障害物回避制御信号を出力する。この障害物回避制御信号が、ケーブル44を通してガイドパイプ制御装置37に伝えられる。
【0034】
ガイドパイプ制御装置37は、障害物回避制御信号に基づいて、多関節ガイドパイプ32において円筒状の各ガイドパイプを連結している関節機構を曲げる。具体的には、関節機構によってつながれる各ガイドパイプ内に通されてガイドパイプごとにそれぞれ取り付けられた各ワイヤの伸縮を、多関節ガイドパイプ32の根元に設けられたモータ(図示せず)によって制御することにより、関節機構を曲げる。このモータは、障害物回避制御信号に基づいたガイドパイプ制御装置37により、駆動が制御される。この関節機構の曲げ制御により、多関節ガイドパイプ32は、図10に示すように、障害物23を避けて下降することができる。注水ノズル51の先端が、部屋1内の水3の中で所定の高さまで下降したとき、制御装置40からの制御指令に基づいて支持部材移動装置による支持部材34のガイドパイプ制御装置37側への移動が停止される。この結果、注水ノズル51の下降も停止される。
【0035】
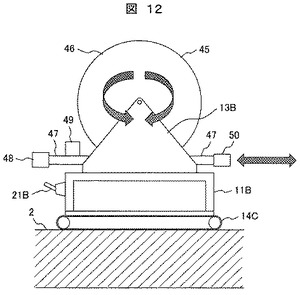
ホース接続装置45は、床面2上で止水剤注入装置30の近くに置かれる(図11参照)。ホース接続装置45は、図12に示すように、車台11B、電動ドラム46、一対のクローラ14C及び止水剤供給ホース47を有する。各クローラ14Cが車台11Bの両脇に旋回可能に設置されている。電動ドラム46が、車台11Bの上面に取り付けられた一対の支持部材13Bの間に配置され、これらの支持部材13Bに回転可能に取り付けられる。止水剤供給ホース47が電動ドラム46に巻き付けられている。連結カプラ48が止水剤供給ホース47の一端部に取り付けられ、連結カプラ50が止水剤供給ホース47の他端部に取り付けられる。位置センサ49が車台11Bに取り付けられ、カメラ21Bが車台11Bの先端部に設置される。第5照明(図示せず)がカメラ21Bの側で車台11Bの先端部に設置される。
【0036】
ホース接続装置45を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14Cを回転させてホース接続装置45を床面2に沿って移動させ、ホース接続装置45を止水剤注入装置30の近くで床面2上に配置する(図11参照)。ホース接続装置45の移動の際にも、オペレータが入力装置58にホース接続装置45の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第5開閉器(図示せず)を操作することにより、車台11Bに設けられた、クローラ14Cを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。ホース接続装置45に設置されたカメラ21Bで撮影された、ホース接続装置45付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってホース接続装置45が存在する位置を把握することができる。
【0037】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム46が回転され、止水剤供給ホース47が電動ドラム12から巻き戻される。止水剤供給ホース47の連結カプラ50は、建屋外に配置された止水剤供給ポンプ(図示せず)に連結される。ホース接続装置45が建屋の外部から建屋内の床面上まで移動している間、電導ドラム46の回転により止水剤供給ホース47が巻き戻され、止水剤供給ホース47が、ホース接続装置45が移動した通路上に敷設される。ホース接続装置45が止水剤注入装置30の側に到達した後、ホース接続装置45の電導ドラム46に巻き付けられた止水剤供給ホース47の連結カプラ48が、止水剤注入装置30の車台31に取り付けられた止水剤供給ホース55の連結カプラ39に結合される。
【0038】
1台のホース接続装置45の電導ドラム46に巻き付けられた止水剤供給ホース47が短くて、この止水剤供給ホース47を建屋外の止水剤供給ポンプと止水剤注入装置30の止水剤供給ホース55に接続できない場合には、複数台のホース接続装置45を用いてそれぞれのホース接続装置45の止水剤供給ホース47をつないで、止水剤供給ポンプと止水剤注入装置30の止水剤供給ホース55を接続すればよい。
【0039】
止水剤供給ポンプを駆動することにより、止水剤が、止水剤供給ホース47及び55、及び多関節ガイドパイプ32内に形成された止水剤供給通路内を導かれ、注入ノズル51に到達し、注入ノズル51より部屋1内の水3の中に噴射される。注入ノズル51から噴射された止水剤52が、部屋1内の底面上に溜まる(図11参照)。ケーブル15の先端部は、幾つかの圧力センサ22を取り付けた状態で部屋1の底面に沿って配置されている。ケーブル15の、その底面に沿って存在する部分に取り付けられた複数の圧力センサ22が、注入ノズル51からの止水剤52の噴射により部屋1の底面に堆積された止水剤53内に埋設される。これらの圧力センサ22は、堆積された止水剤53の重量の作用により大きな出力信号を出力する。制御装置40は、部屋1の底面上に置かれた各圧力センサ22からの出力信号を入力し、注入ノズル51から噴射された止水剤52による部屋1の底面上での止水剤53の広がり状況を示す情報を作成する。作成された、部屋1の底面上での止水剤53の広がり状況を示す情報は、制御装置40から表示装置41に出力されて表示される。オペレータは、表示装置41に表示されたこの情報を見ることにより、部屋1内に注入された止水剤53の底面における広がり状況を知ることができる。
【0040】
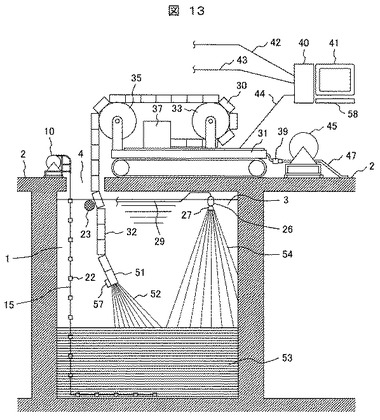
注入ノズル51から止水剤が注入されるにつれて、部屋1内に堆積された止水剤53のレベルが上昇する(図13参照)。注入ノズル51からの噴射により部屋1内に堆積された止水剤53のレベルが、圧力センサ22及び超音波センサ27で測定される。部屋1内に堆積された止水剤53のレベルが上昇すると、ケーブル15に取り付けられた複数の圧力センサ22のうちの幾つかの圧力センサ22が止水剤53内に埋設される。堆積された止水剤53のレベルが上昇するにつれて、その止水剤53に埋設される圧力センサ22の個数が増加する。止水剤53に埋設された圧力センサ22の出力信号は、周囲に存在する止水剤53からの圧力を受け、堆積された止水剤53よりも上方に位置する圧力センサ22の出力信号よりも大きくなる。
【0041】
全ての圧力センサ22から出力された圧力信号が、ケーブル15,42により制御装置40に伝えられる。制御装置40は、各圧力センサ22から入力された圧力信号のうち設定圧力を超える圧力信号を選択する。設定圧力は、止水剤53に埋設されていない圧力センサ22から出力された圧力信号を除外するように設定される。制御装置40により選択された各圧力信号は、部屋1内に堆積された止水剤53内に埋設された各圧力センサ22から出力されたそれぞれの圧力信号であり、部屋1の底面上に配置された複数の圧力センサ22の各出力信号を含んでいる。
【0042】
部屋1の底面から部屋1の天井までの高さは既知であるので、部屋1内に挿入された長さのケーブル15に取り付けられた複数の圧力センサ22のうち、何個の圧力センサ22が部屋1の底面上に配置されており、何個の圧力センサ22が部屋1の底面から部屋1の天井の間に配置されているかは、予め分かっている。このため、制御装置40は、設定圧力を超える出力信号を出力する圧力センサ22の個数から部屋1の底面上に配置された圧力センサ22の個数を差し引き、得られた圧力センサ22の個数よりも1つ少ない数に、隣り合う圧力センサ22相互間の距離(例えば、10cm)を掛けて、部屋1内に堆積された止水剤53の高さを求める。
【0043】
複数の圧力センサ22の替りに複数の温度センサをケーブル15に取り付けた場合には、部屋1内に堆積された止水剤53の温度を止水剤53に埋設された各温度センサで測定する。各温度センサも、圧力センサ22と同様に、所定間隔でケーブル15に取り付けられ、一部の温度センサが部屋1の底面上に配置される。止水剤53は発熱反応によって効果するので、堆積された止水剤53の温度が上昇する。このため、堆積された止水剤53に埋設されている温度センサで測定された温度は、堆積された止水剤53よりも上方に位置する温度センサで測定された温度よりも高くなる。制御装置40は、堆積された止水剤53よりも上方に位置する温度センサで測定された温度を除外する設定温度よりも高い温度を出力した複数の温度センサを選択し、上記した圧力センサ22の場合と同様に、部屋1の底面から部屋1の天井の間に配置された複数の温度センサのうち設定温度を超える、止水剤53内に埋設された温度センサの数よりも1つ少ない数に、隣り合う温度センサ相互間の距離を掛けて、部屋1内に堆積された止水剤53の高さを求める。部屋1の底面上に配置された複数の温度センサの出力信号に基づいて、止水剤注入開始時における部屋1の底面上での止水剤53の広がり状況の情報を得ることができる。
【0044】
部屋1内で放射性物質を含む水3の水面に浮いている遠隔操作無人探査機26に取り付けられた超音波センサ27から超音波54が送信される。超音波センサ27からの超音波54の送信は、オペレータが入力装置58に入力した超音波送信指令に基づいて行われる。制御装置40が超音波送信指令に基づいて出力した超音波送信制御信号が、ケーブル43,29及び遠隔操作無人探査機26を通して超音波センサ27に伝えられ、超音波センサ27が超音波54を送信する。超音波センサ27から送信された超音波54は、水3中を伝播し、部屋1内に堆積された止水剤53の上面で反射される。反射された超音波54は超音波センサ27で受信され、反射された超音波54の受信信号は遠隔操作無人探査機26及びケーブル29,43を通って制御装置40に入力される。制御装置40は、超音波センサ27で受信した超音波54の受信信号に基づいて部屋1内に堆積された止水剤53の高さを求める。
【0045】
圧力センサ22の出力信号及び超音波センサ27での受信信号に基づいてそれぞれ求められた止水剤53の高さを示す情報は、制御装置40から表示装置41に出力されて表示される。
【0046】
制御装置40は、圧力センサ22の出力信号及び超音波センサ27での受信信号に基づいてそれぞれ求められた止水剤53の高さの情報のうち高い値を示す高さの情報に基づいて、支持部材移動装置を制御して支持部材34を車台31の長手方向においてガイドパイプ制御装置37から離れる方向に移動させる。この制御により、注水ノズル51の上昇速度及び上下方向における位置が調節される。このため、注入ノズル51は、部屋1内に堆積された止水剤53の高さが高くなっても、注入ノズル51は、常に、堆積された止水剤53よりも上方に位置し、部屋1内における注入ノズル51からの止水剤52の注入を継続して行うことができる。
【0047】
注入ノズル51から止水剤52が部屋1内に注入されることにより、部屋1内に堆積される止水剤53の容積の増加によって、元々、部屋1内に存在した放射性物質を含む水3は、部屋1の天井付近で部屋1の側壁に接続された循環ライン(図示せず)にオーバーフローして排出される。このため、止水剤の注入によって、水3が開口部4から溢れることを防止できる。
【0048】
部屋1内への止水剤52の注入は、部屋1内における注入された止水剤の広がり度合いを考慮して、部屋1の天井に形成された2つの開口部4(図5参照)内に交互に注入ノズル51を挿入して止水剤の注入を行うことが望ましい。
【0049】
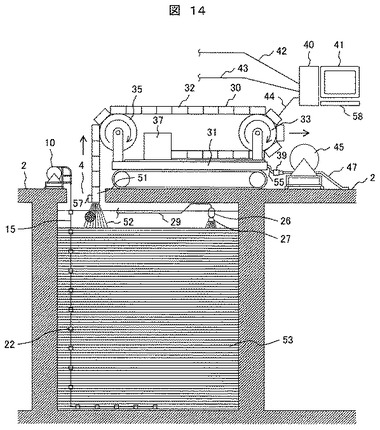
部屋1内に堆積された止水剤53の高さが設定高さになったとき(図14参照)、制御装置40からの制御指令により止水剤供給ポンプを停止する。これにより、部屋1内への止水剤の注入が停止される。部屋1内に堆積された止水剤53の容積は、部屋1内の容積の大部分を占めている。
【0050】
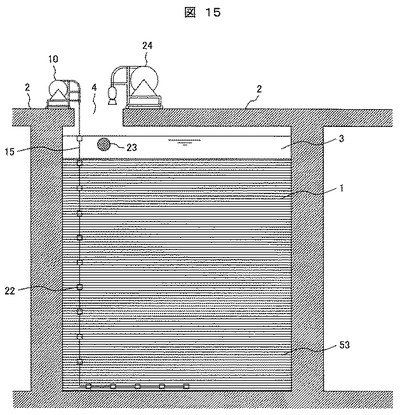
部屋1内への止水剤52の注入が終了した後、床面2上に置かれた止水剤注入装置30及びホース接続装置45が、除染された後、原子炉建屋外に移動される。遠隔操作無人探査機挿入装置24の電導ドラム25が回転されてケーブル29が電導ドラム25に巻き付けられ、遠隔操作無人探査機26及び超音波センサ27が開口部4を通して回収される(図15参照)。センサ挿入装置10の電導ドラム12に巻き付けられたケーブル15が開口部4の上方で切断される。開口部4より下方に存在する、複数の圧力センサ22を取り付けたケーブル15はそれらの圧力センサ22と共に堆積された止水剤53内に残される。センサ挿入装置10及び遠隔操作無人探査機挿入装置24も、除染された後、原子炉建屋外に移動される。止水剤注入装置30、ホース接続装置45、センサ挿入装置10及び遠隔操作無人探査機挿入装置24は、原子炉建屋外への搬出が不可能な場合には、原子炉建屋内に保管される。
【0051】
部屋1内に堆積された止水剤53は硬化するため、部屋1内部の配管に生じて水3が漏洩するき裂が硬化された止水剤53によって塞がれる。
【0052】
以上により、部屋1に対する止水作業が完了する。
【0053】
本実施例によれば、内部の配管にき裂が生じている部屋1内に止水剤を堆積させて止水剤で部屋1内を埋めてしまうので、部屋1内部の配管に生じたき裂を止水剤で塞ぐことができ、そのき裂を通しての放射性物質を含む水3の漏洩を防止することができる。また、部屋1の内部全体を止水剤で埋めるため、部屋1内においてき裂発生箇所を確認するための検査を行う必要がなく、早期に部屋1の止水作業を終了することができる。
【0054】
本実施例の止水剤注入装置30は、車台31に固定された支持部材36に設けたガイドローラ35と車台31の長手方向において移動可能に車台31に取り付けられた支持部材34に設けたガイドローラにまたがって、先端部に注水ノズルを設けた多関節ガイドパイプ32を敷設し、車台31に設けた支持部材移動装置によって支持部材をその長手方向に移動させることによって、止水剤を噴出する注水ノズル51を開口部4を通して止水対象の部屋1内に挿入することができ、また、部屋1内で注水ノズル51を上昇させることができる。止水剤注入装置30では、支持部材移動装置によって支持部材34をその長手方向に移動させて、多関節ガイドパイプ32の先端部に設けられた注水ノズル51を下降及び上昇させることができるため、止水剤注入装置30の高さを低くすることができ、止水対象の部屋1の上の階に存在して止水剤注入装置30を搬入する必要がある高さの低い部屋内に、止水剤注入装置30を容易に搬入することができる。また、上記したように、支持部材34を車台31の長手方向に移動させて注入ノズル51の部屋1内への挿入及び注入ノズル51の部屋1内での上昇を行うことができ、止水対象の部屋1内への止水剤の注入を容易に行うことができる。
【0055】
本実施例では、複数の圧力センサ(または温度センサ)22が取り付けられたケーブル15を、開口部4から部屋1内に挿入し、部屋1内に堆積された止水剤53に埋設された圧力センサ(または温度センサ)22からの出力信号に基づいて部屋1内に堆積された止水剤53の高さを求めるので、堆積された止水剤53の高さを精度良く監視することができる。また、求められた止水剤53の高さに基づいて支持部材移動装置を制御して支持部材34を支持部材36から遠ざかる方向に移動させるので、注水ノズル51を、部屋1内に堆積された止水剤53内に埋設させることなく部屋1内で上昇させることができる。このため、注入ノズル51による部屋1内への止水剤の注入を継続して行うことができる。
【0056】
本実施例では、超音波センサ27を取り付けた遠隔操作無人探査機26を開口部4から部屋1内に挿入するので、開口部4を形成できない位置においても、超音波センサ27から送信された超音波54の反射波を用いて部屋1内に堆積された止水剤53の高さを求めることができる。
【符号の説明】
【0057】
1…部屋、2…床面、3…水、4…開口部、5…ボーリング装置、10…センサ挿入装置、11,11A,11B,31…車台、12,25,46…回転ドラム、15,29…ケーブル、22…圧力センサ、24…密閉容器、24…遠隔操作無人探査機挿入装置、26…遠隔操作無人探査機、27…超音波センサ、30…止水剤注入装置、32…多関節ガイドパイプ、33,35…ガイドローラ、34,36…支持部材、37…ガイドパイプ制御装置、40…制御装置、51…注入ノズル、52,53…止水剤。
【技術分野】
【0001】
本発明は、止水剤注入装置及び止水剤注入方法に係り、特に、原子力プラントにおいて用いるのに好適な止水剤注入装置及び止水剤注入方法に関する。
【背景技術】
【0002】
管路における漏水箇所に対する止水剤を用いた止水方法が、特開昭63−149496号公報及び特公平7−111237号公報に記載されている。
【0003】
特開昭63−149496号公報は、下水管路の補修工法を記載している。この補修工法では、下水管路内に挿入されるエアパッカーに接続されたエアホースが、地上に存在する止水車に接続されており、エアパッカーを下水管路内に挿入して下水管路の破損部まで移動させ、止水車からエアホースを通してエアパッカー内に空気を供給してエアパッカーの外面が下水管路の内面に接触するまでエアパッカーを膨らませる。このとき、下水管路の破損部がエアパッカーの外面に形成される窪みの部分に対向している。止水車で生成した止水剤を、グラウトホースを通してその窪みの部分に供給し、下水管路の破損部を止水剤で補修する。
【0004】
特公平7−111237号公報は電力管路の止水工法を記載している。この止水工法も、特開昭63−149496号公報と同様にパッカーを用いている。パッカーを電力管路内に挿入して電力管路の浸水箇所をパッカーの一対のパッカー部の間に位置させる。グラウト材(止水剤)を一対のパッカー部の間に供給してグラウト材を電力管路の浸水箇所内に注入し、この浸水箇所の止水を行う。
【0005】
特開2006−57405号公報は、地盤内に設置されて開削立坑を取り囲む土留壁の漏水部を止水する止水工法を記載している。土留壁の漏水部近傍の地盤内にボーリングにより掘削孔を形成し、掘削孔内に注入管を挿入する。注入管の上端は、硬化材供給装置に接続される。注入管には袋体が取り付けられている。硬化材供給装置から注入管内に注入された硬化材は袋体内に注入される。硬化材が注入された袋体は、硬化材の注入圧力によって注入管から外れて落下し、土留壁の漏水部近傍から地盤内に形成された隙間を埋めていく。このようにして、土留壁の漏水が防止される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭63−149496号公報
【特許文献2】特公平7−111237号公報
【特許文献3】特開2006−57405号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特開昭63−149496号公報、特公平7−111237号公報及び特開2006−57405号公報では、作業員が漏水箇所の近くで地面に形成された形成された掘削孔まで近づき、止水剤を注入する注入管路を、掘削孔を通して止水箇所まで挿入し、止水剤を止水箇所に注入することができる。
【0008】
しかしながら、原子力プラントが設置された建屋内の部屋において止水を行うことは、放射性環境下での止水作業になり、作業員が近づけないためその止水作業は困難を伴う。このため、遠隔で操作が可能な止水剤注入装置の使用が望まれるが、止水剤注入状況の監視、寸法上の制約を受ける領域での止水を行う部屋内への止水剤の注入を実現することが必要となる。
【0009】
本発明の目的は、部屋内への止水剤の注入を容易に行うことができる止水剤注入装置及び止水剤注入方法を提供することにある。
【課題を解決するための手段】
【0010】
上記した目的を達成する本発明の特徴は、第1ガイドローラが取り付けられ、一対のクローラを取り付けた車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、車台に取り付けられ、第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を注入ノズルに供給する止水剤供給通路が内部に形成され、第1ガイドローラ及び第2ガイドローラにまたがって敷設されて第2ガイドローラに沿って反転され、反転された端部が車台に取り付けられる多関節ガイドパイプと、車台に設けられ、多関節ガイドパイプのその反転された端部に接続されて止水剤供給通路に連絡される止水剤供給管路とを備えたことにある。
【0011】
車台に固定された第1支持部材に設けた第1ガイドローラと車台の長手方向において移動可能に車台に取り付けられた第2支持部材に設けた第2ガイドローラにまたがって、先端部に注水ノズルを設けた多関節ガイドパイプを敷設し、車台に設けた支持部材移動装置によって支持部材をその長手方向に移動させるため、止水剤注入装置の高さを低くすることができる。止水対象の部屋の上の階に存在する部屋の高さが低くても止水剤注入装置を止水対象の部屋の上の階に存在する部屋内に容易に搬入することができる。また、支持部材移動装置によって第2支持部材を車台の長手方向に移動させて、多関節ガイドパイプの先端部に設けられた注水ノズルを、止水対象の部屋の天井に形成された開口部を通して止水対象の部屋内に挿入することができ、この部屋内で注水ノズルを上昇させることができる。このため、止水対象の部屋内への止水剤の注入を容易に行うことができる。
【発明の効果】
【0012】
本発明によれば、部屋内への止水剤の注入を容易に行うことができる。
【図面の簡単な説明】
【0013】
【図1】本発明の好適な一実施例である止水剤注入装置の構成図である。
【図2】止水を行う部屋の天井上方の床面上にセンサ挿入装置を置いた状態を示す説明図である。
【図3】図2に示す部屋の天井に孔を明けるボーリング装置の側面図である。
【図4】図3に示すボーリング装置の正面図である。
【図5】図2に示す部屋の天井に形成された孔の位置を示す説明図である。
【図6】図2に示すセンサ挿入装置の側面図である。
【図7】図2に示すセンサ挿入装置の正面図である。
【図8】止水を行う部屋の天井上方の床面上にセンサ挿入装置と共に遠隔操作無人探査機挿入装置を置いた状態を示す説明図である。
【図9】図8に示す遠隔操作無人探査機挿入装置の側面図である。
【図10】止水を行う部屋の天井上面である床面上に止水剤注入装置を置いた状態を示す説明図である。
【図11】図10に示す止水剤注入装置にホース接続装置を接続し、止水剤注入装置により部屋に止水剤を注入している状態を示す説明図である。
【図12】図11に示すホース接続装置の側面図である。
【図13】止水剤注入装置により注入された止水剤が部屋内に溜まっていく状態を示す説明図である。
【図14】部屋内への止水剤の注入が完了した状態を示す説明図である。
【図15】止水を行う部屋の天井上方の床面上から止水剤注入装置を撤去した状態を示す説明図である。
【発明を実施するための形態】
【0014】
本発明の実施例を以下に説明する。
【実施例】
【0015】
本発明の好適な一実施例である止水剤注入装置を、図1を用いて説明する。
【0016】
本実施例の止水剤注入装置30は、クローラ14B、車台31、多関節ガイドパイプ32、ガイドローラ33,35、ガイドパイプ制御装置(第2制御装置)37及び制御装置(第1制御装置)40を備える。一対のクローラ14Bが、車台31の下方で車台31の両脇に配置され、車台31を支持している。支持部材(第1支持部材)36が車台31の前方で車台31の上面に固定されている。ガイドローラ(第1ガイドローラ)35が支持部材に回転可能に取り付けられている。支持部材(第2支持部材)34が、支持部材36よりも後方に配置され、車台31にスライド可能に取り付けられる。ガイドローラ(第2ガイドローラ)33が支持部材34に回転可能に取り付けられている。支持部材34を車台31の長手方向に移動させる支持部材移動装置(図示せず)が、車台31に取り付けられている。ガイドパイプ制御装置37が支持部材34と支持部材36の間に配置され、車台31の上面に取り付けられる。
【0017】
多関節ガイドパイプ32は、複数のガイドパイプのそれぞれを相互に関節機構により曲るように連結されて構成されている。先端部に注入ノズル51を設けた多関節ガイドパイプ32が、ガイドロー34とガイドローラ33の間にまたがって敷設され、ガイドロー34,33のそれぞれの外面に接触している。多関節ガイドパイプ32は、ガイドローラ33の外面に沿って反転され、反転された端部が車台31の上面に設置されたガイドパイプ制御装置37のケース(図示せず)に接続されている。多関節ガイドパイプ32の反転された端部は、ガイドパイプ制御装置37のケースを介して車台31に固定される。反転された端部から注水ノズル51に向かう止水剤供給通路が、多関節ガイドパイプ32内に形成されている。位置センサ38がガイドパイプ制御装置37のケースに設置される。先端部に連結カプラ39が取り付けられた止水剤供給ホース55が、車台31に取り付けられて車台31に沿って伸びており、ガイドパイプ制御装置37のケース内でおいて多関節ガイドパイプ32に接続される。
【0018】
カメラ56が車台31の前面に取り付けられ、カメラ57が注入ノズル51に取り付けられる。第1照明(図示せず)がカメラ56の近くで車台31に取り付けられ、第2照明(図示せず)がカメラ57の近くで注入ノズル51に取り付けられる。カメラ56,57は制御装置40にケーブル(図示せず)により接続され、表示装置41及び入力装置58が制御装置40に接続される。制御装置40に接続されたケーブル44が、車台31に取り付けられる。
【0019】
止水剤注入装置30を用いて行われる止水剤注入方法を、図2〜図15を用いて以下に具体的に説明する。止水の対象は、原子力プラントが設置された建屋内の或る部屋1であり(図2参照)、この部屋1の内部には放射性物質を含む水3が溜まっている。部屋1内の放射性物質を含む水3は、部屋1内に配置された配管(図示せず)から漏洩している可能性がある。本実施例では、部屋1内部の空間に止水剤を注入するために、止水剤注入装置30を用いた止水作業が行われる。
【0020】
この止水作業を行うにあったって、まず、部屋1の天井には開口部4が形成される。開口部4の形成について詳細に説明する。部屋1の天井の上、すなわち、部屋1の上方に存在する別の部屋の床面2に、ボーリング装置5が置かれる(図3参照)。ボーリング装置5は、図3及び図4に示すように、車台8、一対のキャタピラ9、ボーリングヘッド6、スタンド6A及びドリル(またはホールソー)7を有する。キャタピラ9が車台8の両脇に回転可能に設けられ、クローラ8がそれぞれ取り付けられ、スタンド6Aが車台の上面に取り付けられている。ドリル回転モータ(図示せず)及びボーリングヘッド昇降装置(図示せず)が設けられるボーリングヘッド6が、スタンド6Aに上下方向に移動可能に設けられる。ドリル7が、ボーリングヘッド6に設けられたドリル回転モータに連結され、ボーリングヘッド6から下方に向かって伸びている。
【0021】
ボーリング装置5を、建屋の外部から建屋の内部を通ってこの建屋内に存在する部屋1の上方に位置する床面2まで移動させる。さらに、ドリル7が開口部4を形成する位置の真上になるように、キャタピラ9を旋回させてボーリング装置5を床面2に沿って移動させる。ボーリング装置5を移動する際に、オペレータが入力装置58にボーリング装置5の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第1開閉器(図示せず)を操作することにより、車台8に設けられた、キャタピラ9を旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。ボーリング装置5に設置されたカメラ(図示せず)で撮影された、ボーリング装置5付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってボーリング装置5が存在する位置を把握することができる。
【0022】
床面2に形成される開口部4の位置は、図5に示すように、部屋1の2つの隅付近の2箇所である。ドリル回転モータによりドリル7を回転させながらボーリングヘッド昇降装置によりボーリングヘッド6を下降させ、部屋1のコンクリート製の天井にドリル7により孔を明けてその天井に開口部4を形成する。ドリル回転モータ及びボーリングヘッド昇降装置のそれぞれの駆動、停止も、制御装置40からの制御指令により行われる。
【0023】
開口部4の側の床面2上に、センサ挿入装置10が置かれる(図2参照)。センサ挿入装置10は、図6及び図7に示すように、車台11、電動ドラム12、一対のクローラ14及びケーブル15を有する。各クローラ14が車台11の両脇に回転可能に設置されている。電動ドラム12が、車台11の上面に取り付けられた一対の支持部材13の間に配置され、これらの支持部材13に回転可能に取り付けられる。ケーブル15が電動ドラム12に巻き付けられている。ケーブル15は、また、ケーブル支持部材である支持部材16,17,18に保持される。上方に向かって垂直に伸びる支持部材16が、車台11の上面に取り付けられる。水平方向において平行に配置された支持部材17及び18が、支持部材16に取り付けられる。ケーブルガイド19Aが支持部材16の先端部に、ケーブルガイド19Bが支持部材17の先端部に、ケーブルガイド19Cが支持部材18の先端部にそれぞれ取り付けられる。電動ドラム12に巻き付けられたケーブル15がケーブルガイド19A,19B,19Cによって保持されてガイドされる。位置センサ20が支持部材17に設置され、カメラ21が支持部材18に設置される。第3照明(図示せず)がカメラ21の側で支持部材18に設置される。
【0024】
センサ挿入装置10を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14を回転させてセンサ挿入装置10を床面2に沿って移動させ、センサ挿入装置10を開口部4の近くで床面2上に配置する(図2参照)。センサ挿入装置10を移動させるとき、オペレータが入力装置58にセンサ挿入装置10の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第2開閉器(図示せず)を操作することにより、車台11に設けられた、クローラ14を旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。センサ挿入装置10に設置されたカメラ21で撮影された、センサ挿入装置10付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってセンサ挿入装置10が存在する位置を把握することができる。
【0025】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム12が回転され、ケーブル15が電動ドラム12から巻き戻される。巻き戻されたケーブル15は、ケーブルガイド19A,19B,19Cによって案内され、開口部4を通して部屋1内に下降される。ケーブル15が開口部4内に挿入される状態は、第3照明が点灯されてカメラ21で撮影され、得られた映像を表示装置41に表示することにより監視される。ケーブル15には複数の圧力センサ(または温度センサ)22が所定の間隔(例えば、10cm)で取り付けられている(図2参照)。複数の圧力センサ22が取り付けられたケーブル15は、部屋1内の水3中を下降して、やがて、部屋1の底面に達する。ケーブル15は部屋1の底面に沿って曲げられ、ケーブル15の一部は複数の圧力センサ22を取り付けた状態でその底面上に配置される(図2参照)。そして、所定長さのケーブル15が開口部4から部屋1内に挿入されたとき、制御装置40からの制御指令により電動ドラム12の回転が停止される。ケーブル15に取り付けられた各圧力センサ(または温度センサ)22はケーブル15内の芯線にそれぞれ接続されており、ケーブル15の電導ドラム12側の端部でケーブル15の芯線が制御装置40に接続されたケーブル42の芯線に接続されている(図10参照)。この結果、各圧力センサ(または温度センサ)22は制御装置40に接続される。
【0026】
遠隔操作無人探査機挿入装置24が、図8に示すように、開口部4付近で床面2上に置かれる。遠隔操作無人探査機挿入装置24は、図9に示すように、車台11A、電動ドラム25、一対のクローラ14A及びケーブル29を有する。各クローラ14Aが車台11Aの両脇に回転可能に設置されている。電動ドラム25が、車台11Aの上面に取り付けられた一対の支持部材13Aの間に配置され、これらの支持部材13Aに回転可能に取り付けられる。ケーブル29が電動ドラム25に巻き付けられている。ケーブル29は、また、ケーブル支持部材である支持部材16A,17Aに保持される。上方に向かって垂直に伸びる支持部材16Aが、車台11Aの上面に取り付けられる。水平方向に伸びる支持部材17Aが、支持部材16Aに取り付けられる。ケーブルガイド28Aが支持部材16Aの先端部に、ケーブルガイド28Bが支持部材17Aの先端部にそれぞれ取り付けられる。電動ドラム25に巻き付けられたケーブル29がケーブルガイド28A,28Bによって保持されてガイドされる。ケーブル29の先端が遠隔操作無人探査機26に接続され、超音波センサ27が遠隔操作無人探査機26に取り付けられる。位置センサ20A及びカメラ21Aが支持部材17Aに設置され、第4照明(図示せず)がカメラ21Aの側で支持部材17Aに設置される。
【0027】
遠隔操作無人探査機挿入装置24を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14Aを回転させて遠隔操作無人探査機挿入装置24を床面2に沿って移動させ、遠隔操作無人探査機挿入装置24を開口部4の近くで床面2上に配置する(図8参照)。遠隔操作無人探査機挿入装置24を移動させる際には、オペレータが入力装置58に遠隔操作無人探査機挿入装置24の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第3開閉器(図示せず)を操作することにより、車台11Aに設けられた、クローラ14Aを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。遠隔操作無人探査機挿入装置24に設置されたカメラ21Aで撮影された、遠隔操作無人探査機挿入装置24付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによって遠隔操作無人探査機挿入装置24が存在する位置を把握することができる。
【0028】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム25が回転され、ケーブル29が電動ドラム25から巻き戻される。巻き戻されたケーブル29は、ケーブルガイド28A,28Bによって案内され、開口部4を通して部屋1内に下降される。この開口部4には、ケーブル15も挿入されている。ケーブル29に接続された遠隔操作無人探査機26及び超音波センサ27も、下降されて、開口部4を通して部屋1内に達する。部屋1内の水3の水面上方で部屋1の天井より下方で、開口部4付近に障害物(他の構造部材)23が存在する。このため、遠隔操作無人探査機26及び超音波センサ27は障害物23を避けて下降される。
【0029】
遠隔操作無人探査機26は、水3の水面上を移動してケーブル29が挿入された開口部4に近い、部屋1の側壁の側にある位置58(図5参照)まで移動される。部屋1の4隅のうちの1つの隅に位置するこの位置58では、開口部4を部屋1の天井に形成することができない。遠隔操作無人探査機26を位置58に位置させることにより、遠隔操作無人探査機26に取り付けられた超音波センサ27も位置58に配置される。部屋1内における遠隔操作無人探査機26の移動によって、電導ドラム25に巻き付けられたケーブル29が、電導ドラム25から引き出される。
【0030】
超音波センサ27はケーブル29の芯線に接続され、ケーブル29の電導ドラム25側の端部でケーブル29の芯線が制御装置40に接続されたケーブル43の芯線に接続されている(図10参照)。この結果、超音波センサ27は制御装置40に接続される。
【0031】
止水剤注入装置30を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、止水剤注入装置30が、図10に示すように、開口部4付近で床面2上に置かれる。止水剤注入装置30を移動させるとき、オペレータが入力装置58に止水剤注入装置30の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第4開閉器(図示せず)を操作することにより、車台31に設けられた、クローラ14Bを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。車台31に設置されたカメラ56で撮影された、止水剤注入装置30付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによって止水剤注入装置30が存在する位置を把握することができる。止水剤注入装置30が開口部4の近くに到達したとき、クローラ14Bの旋回が停止されて止水剤注入装置30の移動が停止される。
【0032】
その後、注水ノズル51が開口部4を通して部屋1内に挿入される。注水ノズル51の開口部4内への挿入は、ガイドローラ33を支えている支持部材34をガイドパイプ制御装置37に向かって移動させることにより行われる。すなわち、オペレータが入力装置58に入力したガイドパイプ駆動指令が、制御装置40に入力される。このガイドパイプ駆動指令に基づいて制御装置40が出力した制御指令が、ケーブル44により支持部材移動装置に伝えられる。この制御指令により、支持部材移動装置は、支持部材34をガイドパイプ制御装置37側に移動させる。支持部材34のこの移動によって、ガイドローラ33の回転中心とガイドローラ35の回転中心との間の距離が短くなり、注入ノズル51が開口部4内を通って部屋1内の水3の中を徐々に下降する。支持部材34のガイドパイプ制御装置37側への移動距離の実質2倍の長さだけ、注入ノズル51が下降することになる。
【0033】
注水ノズル51に取り付けられたカメラ57で撮影された映像も表示装置41に表示される。開口部4の下方に障害物23が存在するため、注水ノズル51はこの障害物23を避けて下降させる必要がある。表示装置41に表示された、カメラ57で撮影された映像を監視していたオペレータが、注水ノズル51が障害物23付近に到達することを知ったとき、オペレータが入力装置58に障害物回避指令を制御装置40に入力する。この障害物回避指令を入力した制御装置40が、障害物回避制御信号を出力する。この障害物回避制御信号が、ケーブル44を通してガイドパイプ制御装置37に伝えられる。
【0034】
ガイドパイプ制御装置37は、障害物回避制御信号に基づいて、多関節ガイドパイプ32において円筒状の各ガイドパイプを連結している関節機構を曲げる。具体的には、関節機構によってつながれる各ガイドパイプ内に通されてガイドパイプごとにそれぞれ取り付けられた各ワイヤの伸縮を、多関節ガイドパイプ32の根元に設けられたモータ(図示せず)によって制御することにより、関節機構を曲げる。このモータは、障害物回避制御信号に基づいたガイドパイプ制御装置37により、駆動が制御される。この関節機構の曲げ制御により、多関節ガイドパイプ32は、図10に示すように、障害物23を避けて下降することができる。注水ノズル51の先端が、部屋1内の水3の中で所定の高さまで下降したとき、制御装置40からの制御指令に基づいて支持部材移動装置による支持部材34のガイドパイプ制御装置37側への移動が停止される。この結果、注水ノズル51の下降も停止される。
【0035】
ホース接続装置45は、床面2上で止水剤注入装置30の近くに置かれる(図11参照)。ホース接続装置45は、図12に示すように、車台11B、電動ドラム46、一対のクローラ14C及び止水剤供給ホース47を有する。各クローラ14Cが車台11Bの両脇に旋回可能に設置されている。電動ドラム46が、車台11Bの上面に取り付けられた一対の支持部材13Bの間に配置され、これらの支持部材13Bに回転可能に取り付けられる。止水剤供給ホース47が電動ドラム46に巻き付けられている。連結カプラ48が止水剤供給ホース47の一端部に取り付けられ、連結カプラ50が止水剤供給ホース47の他端部に取り付けられる。位置センサ49が車台11Bに取り付けられ、カメラ21Bが車台11Bの先端部に設置される。第5照明(図示せず)がカメラ21Bの側で車台11Bの先端部に設置される。
【0036】
ホース接続装置45を、建屋の外部から建屋の内部を通って部屋1の上方に位置する上記の床面2まで移動させる。さらに、クローラ14Cを回転させてホース接続装置45を床面2に沿って移動させ、ホース接続装置45を止水剤注入装置30の近くで床面2上に配置する(図11参照)。ホース接続装置45の移動の際にも、オペレータが入力装置58にホース接続装置45の移動指令を制御装置40に入力する。この移動指令を入力した制御装置40が電源に接続される第5開閉器(図示せず)を操作することにより、車台11Bに設けられた、クローラ14Cを旋回させる駆動装置(例えば、モータ)に電流を供給することによって行われる。ホース接続装置45に設置されたカメラ21Bで撮影された、ホース接続装置45付近の映像が表示装置41に表示される。オペレータは、表示された映像を見ることによってホース接続装置45が存在する位置を把握することができる。
【0037】
オペレータが入力装置58に入力した電動ドラム駆動指令が、制御装置40に入力される。この電動ドラム駆動指令に基づいて制御装置40が出力した制御指令により電動ドラム46が回転され、止水剤供給ホース47が電動ドラム12から巻き戻される。止水剤供給ホース47の連結カプラ50は、建屋外に配置された止水剤供給ポンプ(図示せず)に連結される。ホース接続装置45が建屋の外部から建屋内の床面上まで移動している間、電導ドラム46の回転により止水剤供給ホース47が巻き戻され、止水剤供給ホース47が、ホース接続装置45が移動した通路上に敷設される。ホース接続装置45が止水剤注入装置30の側に到達した後、ホース接続装置45の電導ドラム46に巻き付けられた止水剤供給ホース47の連結カプラ48が、止水剤注入装置30の車台31に取り付けられた止水剤供給ホース55の連結カプラ39に結合される。
【0038】
1台のホース接続装置45の電導ドラム46に巻き付けられた止水剤供給ホース47が短くて、この止水剤供給ホース47を建屋外の止水剤供給ポンプと止水剤注入装置30の止水剤供給ホース55に接続できない場合には、複数台のホース接続装置45を用いてそれぞれのホース接続装置45の止水剤供給ホース47をつないで、止水剤供給ポンプと止水剤注入装置30の止水剤供給ホース55を接続すればよい。
【0039】
止水剤供給ポンプを駆動することにより、止水剤が、止水剤供給ホース47及び55、及び多関節ガイドパイプ32内に形成された止水剤供給通路内を導かれ、注入ノズル51に到達し、注入ノズル51より部屋1内の水3の中に噴射される。注入ノズル51から噴射された止水剤52が、部屋1内の底面上に溜まる(図11参照)。ケーブル15の先端部は、幾つかの圧力センサ22を取り付けた状態で部屋1の底面に沿って配置されている。ケーブル15の、その底面に沿って存在する部分に取り付けられた複数の圧力センサ22が、注入ノズル51からの止水剤52の噴射により部屋1の底面に堆積された止水剤53内に埋設される。これらの圧力センサ22は、堆積された止水剤53の重量の作用により大きな出力信号を出力する。制御装置40は、部屋1の底面上に置かれた各圧力センサ22からの出力信号を入力し、注入ノズル51から噴射された止水剤52による部屋1の底面上での止水剤53の広がり状況を示す情報を作成する。作成された、部屋1の底面上での止水剤53の広がり状況を示す情報は、制御装置40から表示装置41に出力されて表示される。オペレータは、表示装置41に表示されたこの情報を見ることにより、部屋1内に注入された止水剤53の底面における広がり状況を知ることができる。
【0040】
注入ノズル51から止水剤が注入されるにつれて、部屋1内に堆積された止水剤53のレベルが上昇する(図13参照)。注入ノズル51からの噴射により部屋1内に堆積された止水剤53のレベルが、圧力センサ22及び超音波センサ27で測定される。部屋1内に堆積された止水剤53のレベルが上昇すると、ケーブル15に取り付けられた複数の圧力センサ22のうちの幾つかの圧力センサ22が止水剤53内に埋設される。堆積された止水剤53のレベルが上昇するにつれて、その止水剤53に埋設される圧力センサ22の個数が増加する。止水剤53に埋設された圧力センサ22の出力信号は、周囲に存在する止水剤53からの圧力を受け、堆積された止水剤53よりも上方に位置する圧力センサ22の出力信号よりも大きくなる。
【0041】
全ての圧力センサ22から出力された圧力信号が、ケーブル15,42により制御装置40に伝えられる。制御装置40は、各圧力センサ22から入力された圧力信号のうち設定圧力を超える圧力信号を選択する。設定圧力は、止水剤53に埋設されていない圧力センサ22から出力された圧力信号を除外するように設定される。制御装置40により選択された各圧力信号は、部屋1内に堆積された止水剤53内に埋設された各圧力センサ22から出力されたそれぞれの圧力信号であり、部屋1の底面上に配置された複数の圧力センサ22の各出力信号を含んでいる。
【0042】
部屋1の底面から部屋1の天井までの高さは既知であるので、部屋1内に挿入された長さのケーブル15に取り付けられた複数の圧力センサ22のうち、何個の圧力センサ22が部屋1の底面上に配置されており、何個の圧力センサ22が部屋1の底面から部屋1の天井の間に配置されているかは、予め分かっている。このため、制御装置40は、設定圧力を超える出力信号を出力する圧力センサ22の個数から部屋1の底面上に配置された圧力センサ22の個数を差し引き、得られた圧力センサ22の個数よりも1つ少ない数に、隣り合う圧力センサ22相互間の距離(例えば、10cm)を掛けて、部屋1内に堆積された止水剤53の高さを求める。
【0043】
複数の圧力センサ22の替りに複数の温度センサをケーブル15に取り付けた場合には、部屋1内に堆積された止水剤53の温度を止水剤53に埋設された各温度センサで測定する。各温度センサも、圧力センサ22と同様に、所定間隔でケーブル15に取り付けられ、一部の温度センサが部屋1の底面上に配置される。止水剤53は発熱反応によって効果するので、堆積された止水剤53の温度が上昇する。このため、堆積された止水剤53に埋設されている温度センサで測定された温度は、堆積された止水剤53よりも上方に位置する温度センサで測定された温度よりも高くなる。制御装置40は、堆積された止水剤53よりも上方に位置する温度センサで測定された温度を除外する設定温度よりも高い温度を出力した複数の温度センサを選択し、上記した圧力センサ22の場合と同様に、部屋1の底面から部屋1の天井の間に配置された複数の温度センサのうち設定温度を超える、止水剤53内に埋設された温度センサの数よりも1つ少ない数に、隣り合う温度センサ相互間の距離を掛けて、部屋1内に堆積された止水剤53の高さを求める。部屋1の底面上に配置された複数の温度センサの出力信号に基づいて、止水剤注入開始時における部屋1の底面上での止水剤53の広がり状況の情報を得ることができる。
【0044】
部屋1内で放射性物質を含む水3の水面に浮いている遠隔操作無人探査機26に取り付けられた超音波センサ27から超音波54が送信される。超音波センサ27からの超音波54の送信は、オペレータが入力装置58に入力した超音波送信指令に基づいて行われる。制御装置40が超音波送信指令に基づいて出力した超音波送信制御信号が、ケーブル43,29及び遠隔操作無人探査機26を通して超音波センサ27に伝えられ、超音波センサ27が超音波54を送信する。超音波センサ27から送信された超音波54は、水3中を伝播し、部屋1内に堆積された止水剤53の上面で反射される。反射された超音波54は超音波センサ27で受信され、反射された超音波54の受信信号は遠隔操作無人探査機26及びケーブル29,43を通って制御装置40に入力される。制御装置40は、超音波センサ27で受信した超音波54の受信信号に基づいて部屋1内に堆積された止水剤53の高さを求める。
【0045】
圧力センサ22の出力信号及び超音波センサ27での受信信号に基づいてそれぞれ求められた止水剤53の高さを示す情報は、制御装置40から表示装置41に出力されて表示される。
【0046】
制御装置40は、圧力センサ22の出力信号及び超音波センサ27での受信信号に基づいてそれぞれ求められた止水剤53の高さの情報のうち高い値を示す高さの情報に基づいて、支持部材移動装置を制御して支持部材34を車台31の長手方向においてガイドパイプ制御装置37から離れる方向に移動させる。この制御により、注水ノズル51の上昇速度及び上下方向における位置が調節される。このため、注入ノズル51は、部屋1内に堆積された止水剤53の高さが高くなっても、注入ノズル51は、常に、堆積された止水剤53よりも上方に位置し、部屋1内における注入ノズル51からの止水剤52の注入を継続して行うことができる。
【0047】
注入ノズル51から止水剤52が部屋1内に注入されることにより、部屋1内に堆積される止水剤53の容積の増加によって、元々、部屋1内に存在した放射性物質を含む水3は、部屋1の天井付近で部屋1の側壁に接続された循環ライン(図示せず)にオーバーフローして排出される。このため、止水剤の注入によって、水3が開口部4から溢れることを防止できる。
【0048】
部屋1内への止水剤52の注入は、部屋1内における注入された止水剤の広がり度合いを考慮して、部屋1の天井に形成された2つの開口部4(図5参照)内に交互に注入ノズル51を挿入して止水剤の注入を行うことが望ましい。
【0049】
部屋1内に堆積された止水剤53の高さが設定高さになったとき(図14参照)、制御装置40からの制御指令により止水剤供給ポンプを停止する。これにより、部屋1内への止水剤の注入が停止される。部屋1内に堆積された止水剤53の容積は、部屋1内の容積の大部分を占めている。
【0050】
部屋1内への止水剤52の注入が終了した後、床面2上に置かれた止水剤注入装置30及びホース接続装置45が、除染された後、原子炉建屋外に移動される。遠隔操作無人探査機挿入装置24の電導ドラム25が回転されてケーブル29が電導ドラム25に巻き付けられ、遠隔操作無人探査機26及び超音波センサ27が開口部4を通して回収される(図15参照)。センサ挿入装置10の電導ドラム12に巻き付けられたケーブル15が開口部4の上方で切断される。開口部4より下方に存在する、複数の圧力センサ22を取り付けたケーブル15はそれらの圧力センサ22と共に堆積された止水剤53内に残される。センサ挿入装置10及び遠隔操作無人探査機挿入装置24も、除染された後、原子炉建屋外に移動される。止水剤注入装置30、ホース接続装置45、センサ挿入装置10及び遠隔操作無人探査機挿入装置24は、原子炉建屋外への搬出が不可能な場合には、原子炉建屋内に保管される。
【0051】
部屋1内に堆積された止水剤53は硬化するため、部屋1内部の配管に生じて水3が漏洩するき裂が硬化された止水剤53によって塞がれる。
【0052】
以上により、部屋1に対する止水作業が完了する。
【0053】
本実施例によれば、内部の配管にき裂が生じている部屋1内に止水剤を堆積させて止水剤で部屋1内を埋めてしまうので、部屋1内部の配管に生じたき裂を止水剤で塞ぐことができ、そのき裂を通しての放射性物質を含む水3の漏洩を防止することができる。また、部屋1の内部全体を止水剤で埋めるため、部屋1内においてき裂発生箇所を確認するための検査を行う必要がなく、早期に部屋1の止水作業を終了することができる。
【0054】
本実施例の止水剤注入装置30は、車台31に固定された支持部材36に設けたガイドローラ35と車台31の長手方向において移動可能に車台31に取り付けられた支持部材34に設けたガイドローラにまたがって、先端部に注水ノズルを設けた多関節ガイドパイプ32を敷設し、車台31に設けた支持部材移動装置によって支持部材をその長手方向に移動させることによって、止水剤を噴出する注水ノズル51を開口部4を通して止水対象の部屋1内に挿入することができ、また、部屋1内で注水ノズル51を上昇させることができる。止水剤注入装置30では、支持部材移動装置によって支持部材34をその長手方向に移動させて、多関節ガイドパイプ32の先端部に設けられた注水ノズル51を下降及び上昇させることができるため、止水剤注入装置30の高さを低くすることができ、止水対象の部屋1の上の階に存在して止水剤注入装置30を搬入する必要がある高さの低い部屋内に、止水剤注入装置30を容易に搬入することができる。また、上記したように、支持部材34を車台31の長手方向に移動させて注入ノズル51の部屋1内への挿入及び注入ノズル51の部屋1内での上昇を行うことができ、止水対象の部屋1内への止水剤の注入を容易に行うことができる。
【0055】
本実施例では、複数の圧力センサ(または温度センサ)22が取り付けられたケーブル15を、開口部4から部屋1内に挿入し、部屋1内に堆積された止水剤53に埋設された圧力センサ(または温度センサ)22からの出力信号に基づいて部屋1内に堆積された止水剤53の高さを求めるので、堆積された止水剤53の高さを精度良く監視することができる。また、求められた止水剤53の高さに基づいて支持部材移動装置を制御して支持部材34を支持部材36から遠ざかる方向に移動させるので、注水ノズル51を、部屋1内に堆積された止水剤53内に埋設させることなく部屋1内で上昇させることができる。このため、注入ノズル51による部屋1内への止水剤の注入を継続して行うことができる。
【0056】
本実施例では、超音波センサ27を取り付けた遠隔操作無人探査機26を開口部4から部屋1内に挿入するので、開口部4を形成できない位置においても、超音波センサ27から送信された超音波54の反射波を用いて部屋1内に堆積された止水剤53の高さを求めることができる。
【符号の説明】
【0057】
1…部屋、2…床面、3…水、4…開口部、5…ボーリング装置、10…センサ挿入装置、11,11A,11B,31…車台、12,25,46…回転ドラム、15,29…ケーブル、22…圧力センサ、24…密閉容器、24…遠隔操作無人探査機挿入装置、26…遠隔操作無人探査機、27…超音波センサ、30…止水剤注入装置、32…多関節ガイドパイプ、33,35…ガイドローラ、34,36…支持部材、37…ガイドパイプ制御装置、40…制御装置、51…注入ノズル、52,53…止水剤。
【特許請求の範囲】
【請求項1】
一対のクローラを取り付けた車台と、第1ガイドローラが取り付けられ、前記車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、前記車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、前記車台に取り付けられ、前記第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を前記注入ノズルに供給する止水剤供給通路が内部に形成され、前記第1ガイドローラ及び前記第2ガイドローラにまたがって敷設されて前記第2ガイドローラに沿って反転され、反転された端部が前記車台に取り付けられる多関節ガイドパイプと、前記車台に設けられ、前記多関節ガイドパイプの前記反転された端部に接続されて前記止水剤供給通路に連絡される止水剤供給管路とを備えたことを特徴とする止水剤注入装置。
【請求項2】
第1ガイドローラが取り付けられ、一対のクローラを取り付けた前記車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、前記車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、前記車台に取り付けられ、前記第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を前記注入ノズルに供給する止水剤供給通路が内部に形成され、前記第1ガイドローラ及び前記第2ガイドローラにまたがって敷設されて前記第2ガイドローラに沿って反転され、反転された端部が前記車台に取り付けられる多関節ガイドパイプと、前記車台に設けられ、前記多関節ガイドパイプの前記反転された端部に接続されて前記止水剤供給通路に連絡される止水剤供給管路とを備えた止水剤注入装置を用いた止水対象の部屋への止水剤注入方法であって、前記止水剤注入装置を前記止水対象の部屋の上の階の床面に置き、前記支持部材移動装置によって前記第2支持部材を前記第1支持部材に向かって移動させて前記注入ノズルを前記止水対象の部屋の天井に形成された開口部を通して前記部屋内に挿入し、前記止水剤供給管路、及び前記多関節ガイドパイプ内の前記止水剤供給通路を通して止水剤を前記注入ノズルに供給し、前記注入ノズルから前記止水剤を前記部屋内に注入することを特徴とする止水剤注入方法。
【請求項3】
複数の圧力センサ及び複数の温度センサのいずれかのセンサが取り付けられたケーブルを、前記開口部から前記部屋内に挿入し、前記部屋内に堆積された前記止水剤に埋設された前記センサからの出力信号に基づいて前記部屋内に堆積された前記止水剤の高さを求め、前記求められた高さに基づいて前記支持部材移動装置を制御して前記第2支持部材を移動させることによって前記注水ノズルを前記部屋内で上昇させる請求項2に記載の止水剤注入方法。
【請求項4】
前記部屋は放射性物質を含む水が溜まっている部屋であり、前記注入ノズルを前記水中に入れてこの注水ノズルから前記止水剤を注入する請求項2または3に記載の止水剤注入方法。
【請求項5】
超音波センサを取り付けた遠隔操作無人探査機を、前記開口部から前記部屋内に挿入し、前記超音波センサから前記水中に超音波を送信し、前記部屋内に堆積された前記止水剤から反射された前記超音波の反射波を前記超音波センサで受信し、この反射波に基づいて前記部屋内に堆積された前記止水剤の高さを求める請求項4に記載の止水剤注入方法。
【請求項6】
前記車台に設けられた前記止水剤供給管路に他の止水剤供給管路を接続し、前記止水剤をこれらの止水剤供給管路により供給する請求項2ないし5のいずれか1項に記載の止水剤注入方法。
【請求項1】
一対のクローラを取り付けた車台と、第1ガイドローラが取り付けられ、前記車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、前記車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、前記車台に取り付けられ、前記第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を前記注入ノズルに供給する止水剤供給通路が内部に形成され、前記第1ガイドローラ及び前記第2ガイドローラにまたがって敷設されて前記第2ガイドローラに沿って反転され、反転された端部が前記車台に取り付けられる多関節ガイドパイプと、前記車台に設けられ、前記多関節ガイドパイプの前記反転された端部に接続されて前記止水剤供給通路に連絡される止水剤供給管路とを備えたことを特徴とする止水剤注入装置。
【請求項2】
第1ガイドローラが取り付けられ、一対のクローラを取り付けた前記車台に固定された第1支持部材と、第2ガイドローラが取り付けられ、前記車台の長手方向に移動可能に前記車台に取り付けられた第2支持部材と、前記車台に取り付けられ、前記第2支持部材を前記長手方向に移動させる支持部材移動装置と、先端部に注入ノズルが取り付けられ、止水剤を前記注入ノズルに供給する止水剤供給通路が内部に形成され、前記第1ガイドローラ及び前記第2ガイドローラにまたがって敷設されて前記第2ガイドローラに沿って反転され、反転された端部が前記車台に取り付けられる多関節ガイドパイプと、前記車台に設けられ、前記多関節ガイドパイプの前記反転された端部に接続されて前記止水剤供給通路に連絡される止水剤供給管路とを備えた止水剤注入装置を用いた止水対象の部屋への止水剤注入方法であって、前記止水剤注入装置を前記止水対象の部屋の上の階の床面に置き、前記支持部材移動装置によって前記第2支持部材を前記第1支持部材に向かって移動させて前記注入ノズルを前記止水対象の部屋の天井に形成された開口部を通して前記部屋内に挿入し、前記止水剤供給管路、及び前記多関節ガイドパイプ内の前記止水剤供給通路を通して止水剤を前記注入ノズルに供給し、前記注入ノズルから前記止水剤を前記部屋内に注入することを特徴とする止水剤注入方法。
【請求項3】
複数の圧力センサ及び複数の温度センサのいずれかのセンサが取り付けられたケーブルを、前記開口部から前記部屋内に挿入し、前記部屋内に堆積された前記止水剤に埋設された前記センサからの出力信号に基づいて前記部屋内に堆積された前記止水剤の高さを求め、前記求められた高さに基づいて前記支持部材移動装置を制御して前記第2支持部材を移動させることによって前記注水ノズルを前記部屋内で上昇させる請求項2に記載の止水剤注入方法。
【請求項4】
前記部屋は放射性物質を含む水が溜まっている部屋であり、前記注入ノズルを前記水中に入れてこの注水ノズルから前記止水剤を注入する請求項2または3に記載の止水剤注入方法。
【請求項5】
超音波センサを取り付けた遠隔操作無人探査機を、前記開口部から前記部屋内に挿入し、前記超音波センサから前記水中に超音波を送信し、前記部屋内に堆積された前記止水剤から反射された前記超音波の反射波を前記超音波センサで受信し、この反射波に基づいて前記部屋内に堆積された前記止水剤の高さを求める請求項4に記載の止水剤注入方法。
【請求項6】
前記車台に設けられた前記止水剤供給管路に他の止水剤供給管路を接続し、前記止水剤をこれらの止水剤供給管路により供給する請求項2ないし5のいずれか1項に記載の止水剤注入方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−113602(P2013−113602A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257366(P2011−257366)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【出願人】(000233044)株式会社日立エンジニアリング・アンド・サービス (276)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【出願人】(000233044)株式会社日立エンジニアリング・アンド・サービス (276)
【Fターム(参考)】
[ Back to top ]