
正弦波信号のパラメーターを求める方法及びシステム
【課題】電力網によって生成された正弦波信号の少なくとも1つのパラメーター(周波数、位相角、振幅)を求める方法を提供する。
【解決手段】信号の周波数は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間の線形関係に基づいて、雑音のサンプル間の統計的相関を用いて反復的に求められる。現在の反復中に、統計的相関は、前の反復中に求められた信号の周波数に基づいて更新され、信号のサンプルは、現在の時間期間中の信号の値を用いて更新される。反復的に求めることによって、加法性雑音の影響が低減される。
【解決手段】信号の周波数は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間の線形関係に基づいて、雑音のサンプル間の統計的相関を用いて反復的に求められる。現在の反復中に、統計的相関は、前の反復中に求められた信号の周波数に基づいて更新され、信号のサンプルは、現在の時間期間中の信号の値を用いて更新される。反復的に求めることによって、加法性雑音の影響が低減される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、包括的には電力網に関し、特に、電力網によって生成された正弦波信号のパラメーターを求めるシステム及び方法に関する。
【背景技術】
【0002】
ユーティリティ電力網における同期は、分散発電機(distributed power generator)が電力網に接続されたときの制御及び操作の目的で重要な問題である。同期は、電力網内の三相電圧信号の位相角を求めることを含む。通常、電力網電圧信号は、理想的な状態から逸脱し、加法性雑音、周波数変動、電圧不平衡、及び高調波成分に起因して歪められる。結果として、そのような歪みを最小にする同期を提供することが望ましい。同様に、電圧信号の周波数及び位相角の高速検出も、電力需要を管理するために分散発電機を再接続又は接続解除するのに重要である。
【0003】
不平衡な三相電圧信号は、正相順、逆相順、及び零相順を含む。通例、同期は正相順の電圧信号の位相角を検出することを必要とする。位相角を検出する複数の従来の方法が開発された。
【0004】
零交差法は最も単純な技法である。しかしながら、この方法は電圧信号の外乱に敏感である。また、位相角は零交差点においてのみ求められ、したがって、この方法は低い動的性能を有する。
【0005】
位相同期回路(PLL)法は、同期回転基準フレームとともに用いることができる。しかしながら、PLL法の性能は、電圧不平衡の存在下で劣化する。なぜなら、逆相順の存在に起因して二重周波数成分が生じるためである。
【0006】
対称成分変換の適用を通じて正相順と逆相順とを分離することに基づいて不平衡に対処するいくつかの方法が開発されている。別の方法は、固定重みベクトルを用いて電圧信号の周波数及び位相角を推定する。しかしながら、この方法は適応的でない。重みは発見的に選択され、したがって、状況によってはこの方法は適切に機能しない。
【発明の概要】
【発明が解決しようとする課題】
【0007】
この発明の目的は、正弦波信号の少なくとも1つのパラメーターを求める方法を提供することである。正弦波信号は、3つの相関する正弦波信号、例えば三相電圧信号又は三相電流信号を含むことができる。パラメーターは、或る時点に、少なくとも信号の周波数、及び信号の位相角、及び信号の振幅を含むことができる。
【0008】
この発明の更なる目的は、加法性雑音等の雑音の存在下で信号のパラメーターを求める方法を提供することである。
【0009】
この発明の更なる目的は、信号のパラメーターを、現在の反復が前の反復中に求められたパラメーターを用いるように経時的に反復的に求める方法を提供することである。この発明のいくつかの実施の形態の反復的に求めることによって、加法性雑音の影響を低減することが可能になる。
【課題を解決するための手段】
【0010】
この発明のいくつかの実施の形態は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間に線形関係が存在するという認識に基づいている。また、雑音のサンプル間にも統計的相関が存在し、これによって線形関係に基づいて信号の周波数を求めることが可能になる。
【発明の効果】
【0011】
この発明のいくつかの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法及びシステムを提供する。振幅及び位相不平衡の双方が検討される。
【図面の簡単な説明】
【0012】
【図1】この発明のいくつかの実施の形態によるシステムのブロック図である。
【図2A】図1のシステムの異なる実施の形態によって実行される様々な動作の一例のフローチャートである。
【図2B】図1のシステムの異なる実施の形態によって実行される様々な動作の別の例のフローチャートである。
【図3】いくつかの実施の形態による、雑音の統計的相関及び適応重みを用いることによって、クラーク変換領域において三相電圧信号の周波数及び位相角を求める方法のブロック図である。
【図4】いくつかの実施の形態によるクラーク変換のブロック図である。
【図5】この発明のいくつかの実施の形態による重み行列における重みを更新する方法のブロック図である。
【図6】この発明のいくつかの実施の形態による周波数及び位相角を求める方法のブロック図である。
【発明を実施するための形態】
【0013】
この発明のいくつかの実施の形態は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間に線形関係が存在するという認識に基づいている。また、雑音のサンプル間にも統計的相関が存在し、これによって線形関係に基づいて信号の周波数を求めることが可能になる。
【0014】
1つの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法を提供する。この実施の形態は、信号の振幅及び位相不平衡の双方を検討する。
【0015】
いくつかの実施の形態では、自然基準フレーム内で三相電圧信号を処理する代わりに、クラーク変換を適用することによって正相順の信号と逆相順の信号とを分離する。次に、雑音のサンプル間の統計的相関を用いて雑音共分散行列の最適な重みが求められる。その最適な重みを用いて、加重最小二乗法を介して信号の周波数及び位相角を求める。
【0016】
したがって、この発明の1つの実施の形態は、信号の少なくとも1つのパラメーターを求める方法であって、該信号は雑音を含む正弦波信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含む方法を開示する。該方法は、
前記信号の前記周波数を、該信号の該周波数と、前記雑音のサンプルと、該信号のサンプルとの間の線形関係に基づいて、前記雑音の前記サンプル間の統計的相関を用いて反復的に求めることを含み、現在の反復は、
前の反復中に求められた前記信号の前記周波数に基づいて前記統計的相関を更新することと、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新することと、を含む。前記信号の前記位相角は該信号の前記周波数に基づいて求めることができる。
【0017】
本方法は、前記信号の基本周波数に基づいて前記統計的相関を初期化することと、該統計的相関を用いて重み行列を求めることと、前記信号に離散発振器を作用させて信号のサンプルを得ることと、クラーク変換を用いて信号をクラーク基準領域に変換することと、のうちの1つ又はそれらの組合せも含むことができる。
【0018】
様々な実施の形態において、前記線形関係は、前記雑音に起因する誤差、雑音ベクトル、周波数行列、第1項のベクトル、第2項のベクトルに基づいて規定され、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である。
【0019】
本方法の反復は或る時間期間にわたって実行することができる。いくつかの時間期間は重複することができる。それに加えて、又は代替的に、現在の反復の現在の時間期間は前の反復の前の時間期間に隣り合うことができる。
【0020】
別の実施の形態は、信号の少なくとも1つのパラメーターを求めるシステムであって、該信号は雑音を含む三相電圧信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含むシステムを開示する。該システムは、
時間期間ごとに前記信号のサンプルを求める離散発振器と、
前記時間期間ごとに前記信号の前記周波数を、該信号の該周波数と、前記雑音と、該信号のサンプルとの間の線形関係に基づいて反復的に求めるプロセッサであって、該プロセッサは現在の反復中に、
前の反復中に求められた前記信号の前記周波数に基づいて前記雑音共分散行列を更新し、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新し、
前記雑音共分散行列及び前記信号の前記サンプルを用いて前記周波数を求める、
ものと、を備える。
【0021】
プロセッサは、信号の周波数に基づいて信号の位相角を求め、加重最小二乗方を用いて雑音共分散行列を更新するように構成することもできる。
【0022】
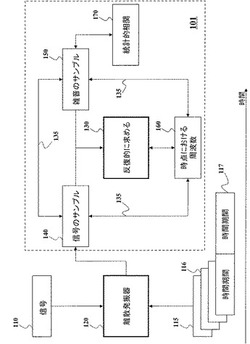
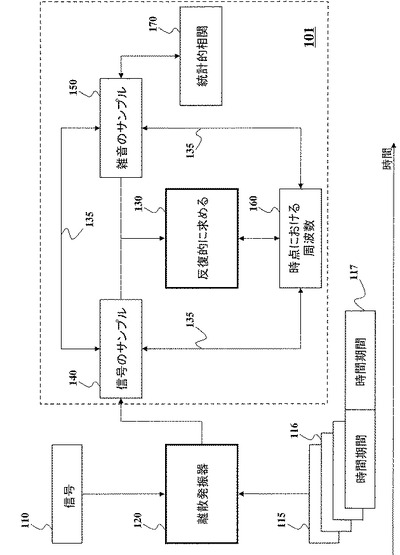
図1は、信号110の少なくとも1つのパラメーターを求めるシステムを示している。信号は雑音を含む電圧信号である。パラメーターは、或る時点における信号の周波数及び該時点における信号の位相角のうちの少なくとも一方を含む。システムは、時間期間115〜117ごとに信号110のサンプル140を求める離散発振器120(discrete oscillator)を備える。いくつかの実施の形態では、離散発振器120は、信号の同期した、すなわちクロック制御された、離散時間型で、離散値型のサンプルを求めるように構成された任意の数値制御型発振器とすることができる。
【0023】
システムは、時間期間ごとに、信号の周波数と、雑音のサンプル150と、信号のサンプル140との間の線形関係135に基づいて信号110の周波数160を反復的に求める(130)プロセッサ101も備える。様々な実施の形態において、求めること(130)は、雑音のサンプル間の統計的相関170を用いる。
【0024】
線形関係は、
【0025】
【数1】

【0026】
に従って規定され、ここで、ζは雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、第1項のベクトル及び第2項のベクトルの要素は信号のサンプルの関数である。線形関係のいくつかの解を以下に説明する。
【0027】
求めること(130)の反復は時間期間にわたって実行され、少なくともいくつかの時間期間115及び116が重複している。それに加えて、又は代替的に、現在の反復の現在の時間期間117は前の反復の前の時間期間116に隣り合うことができる。
【0028】
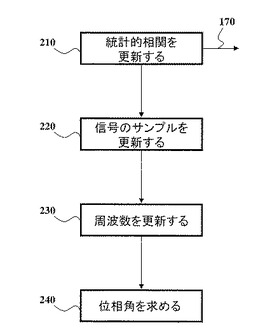
図2A及び図2Bは、この発明の様々な実施の形態による反復の例を示している。例えば、図2Aに示す1つの実施の形態による現在の反復は、前の反復中に求められた信号の周波数160に基づいて統計的相関170を更新すること(210)、及び信号のサンプル140を、現在の時間期間中の信号の値を用いて更新すること(220)を含む。更新された統計的相関及びサンプルに基づいて、実施の形態は線形関係135を用いて周波数160を更新する(230)。
【0029】
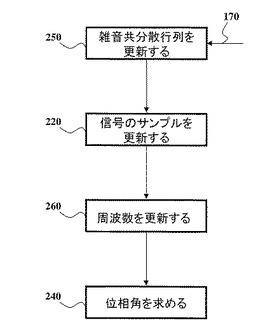
図2Bに示す別の実施の形態は、統計的相関170を用いて雑音共分散行列を求める。この実施の形態では、反復ごとに、前の反復中に求められた信号の周波数に基づいて雑音共分散行列を更新し(250)、信号のサンプルを、現在の時間期間中の信号の値を用いて更新し(220)、周波数を、雑音共分散行列及び信号のサンプルを用いて更新する(260)。
【0030】
いくつかの実施の形態では、第1の反復の場合、周波数は信号の基本周波数である。例えば、公称周波数に基づいて統計的相関及び/又は雑音共分散行列が初期化される。また、いくつかの実施の形態では、或る時点の信号の周波数に基づいて信号の位相角が求められる(240)。
【0031】
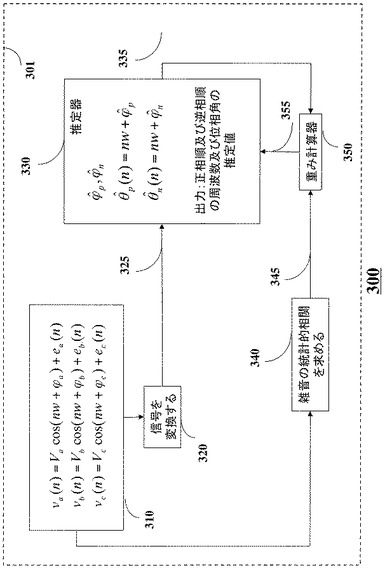
図3は、この発明の1つの実施の形態による雑音及び適応重み355の統計的相関345を用いることによって、クラーク変換領域において三相電圧信号310の周波数及び位相角335を求める方法300のブロック図を示している。信号310はユーティリティ電力網からの信号とすることができる。実施の形態は、周波数及び位相角を反復的に求めるために加重最小二乗法330を用いる。
【0032】
電力網の三相電圧信号310は、電力網内の同期のために測定することができる。電圧不平衡の存在下では、三相電圧信号310は、以下のように表されるabc基準領域における加法性雑音によって歪められる。
【0033】
【数2】
【0034】
ここで、nはi=a,b,cの場合の時点であり、Viは信号の振幅であり、φiは位相iの初期位相角であり、wは信号の角周波数であり、w=2πf/fsであり、ここで、fは信号の周波数であり、fsはサンプリング周波数であり、eは加法性雑音である。
【0035】
時点nにおける加法性雑音は
【0036】
【数3】
【0037】
であり、ここで、Tは転置演算子、例えば転置演算子400である。いくつかの実施の形態では、雑音は共分散行列Qを有する零平均ガウス確率ベクトルを含む。いくつかの実施の形態では、異なる時点における雑音ベクトルは相関していない。
【0038】
フォーテスキューの定理によれば、三相電圧信号310は以下のように書き変えることができる。
【0039】
【数4】
【0040】
ここで、vp(n)は正相順pを表し、vn(n)は逆相順nを表し、及びv0(n)は零相順を表し、それぞれ以下によって規定される。
【0041】
【数5】
【0042】
ここで、Vi及びθi(n)(ここで、i=q,n,0)はそれぞれ各相順の振幅及び位相角である。
【0043】
この発明の1つの実施の形態によれば、位相角θp(n)の推定値330は、
a.例えばクラーク変換行列400を用いて、クラーク基準領域において、三相電圧信号310をαβ基準信号410に変換するステップ320と、
公称動作状態から統計的相関特性を得て(340)雑音共分散行列345を求めるステップと、
加重最小二乗法を用いて、信号のパラメーター及びαβ基準信号の対応する直交位相信号を求めるステップであって、重み計算器によって返される重み355を反復的に用いる、求めるステップと、
b.信号の他のパラメーターに対する位相角の関係に基づいて正相順の位相角を求めるステップと、
によって得られる。
【0044】
クラーク変換
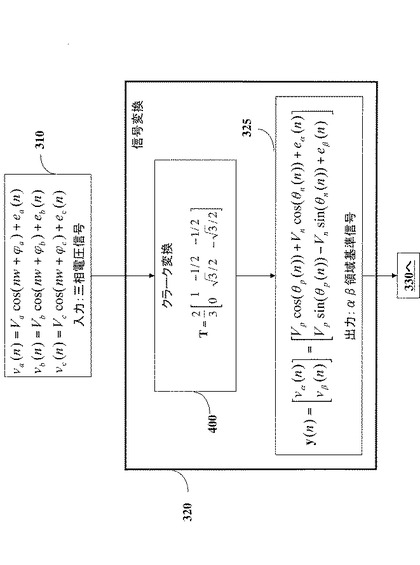
図4に示すように、式(1)に従って規定された信号にクラーク変換320を適用した後、αβ基準領域における対応する信号325は、
【0045】
【数6】
【0046】
となり、ここで、
【0047】
【数7】
【0048】
はクラーク変換行列400である。
【0049】
このとき、結果としてのαβ基準フレーム信号325は以下によって表すことができる。
【0050】
【数8】
【0051】
雑音ベクトルの共分散eαβ(n)=[eα(n),eβ(n)]TはQαβ=TQTTとして表される。
【0052】
いくつかの実施の形態は、クラーク変換を適用して零相順を取り除き、未知のパラメーターの数を2だけ減らす。式(4)における未知のパラメーター数は減らされるが、式(4)は依然として2つの正弦波信号、すなわち正相順及び逆相順のパラメーターを含み、未知のパラメーターに関して非線形である。
【0053】
しかしながら、正相順及び逆相順は同じ周波数を有し、信号325は以下に従って規定することができる。
【0054】
【数9】
【0055】
式(5)から、αβ領域内の各位相は、雑音で歪められた1つの正弦波信号しか含まないことを見てとることができる。問題は、単一トーンの正弦波信号のパラメーターを推定することとなる。パラメーターVi及びφi(ここで、i=α,β)が信号vα(n)及びvβ(n)から求められた後、位相角θp(n)を式(5)に基づいて求めることができる。
【0056】
加重最小二乗法
いくつかの実施の形態では、信号の周波数は、離散発振器に基づいて抽出され、加重最小二乗(WLS)法を用いて反復的に求められる。例えば、1つの実施の形態は雑音のサンプルの統計的相関345を用いて、反復ごとに雑音共分散行列355を更新し、これによって周波数推定の性能が改善する。特に、離散発振器によれば、未知の周波数ω、振幅V、及び初期位相φを有する正弦波信号v(n)=Vcos(nω+φ)について、ωと連続3つ組v(n)、v(n−1)、及びv(n−2)との間の以下の関係が有効である。
【0057】
【数10】
【0058】
信号の3つのサンプルを所与とすると、信号の周波数は以下に従って求めることができる。
【0059】
【数11】
【0060】
しかしながら、式(7)は、正弦波信号が雑音を含むときに機能しない。また、分母が零に非常に近いときに数値的悪条件が存在する。しかしながら、出願人らは、信号の雑音成分の統計的相関によって上述した問題を克服することが可能になることを認識している。
【0061】
式(5)の信号の双方のパラメーター、例えば振幅及び周波数が未知であり、経時的に低速に変動するので、いくつかの実施の形態では、或る特定の数のサンプルにわたってパラメーターが区分的に定数であるとみなす。例えば、n=0,1,…,N−1であり、Nは4以上である。
【0062】
したがって、離散発振器は、式(5)の3行目及び6行目に適用することができ、雑音項は以下に従って考慮に入れられる。
【0063】
【数12】
【0064】
ここで、雑音項ζα(n)及びζβ(n)は
【0065】
【数13】
【0066】
として与えられる。
【0067】
角周波数ωは、α=cosωに含まれる。n=2,3,…,N−1について式(8a)及び式(8b)を結合することによって、結果として
【0068】
【数14】
【0069】
となる。ここで、nは共分散行列Qnを有する雑音ベクトルであり、
【0070】
【数15】
【0071】
に従って求められ、共分散行列Qn=diag(Qαβ,Qαβ,…,Qαβ)である。eαβ(n)及びQαβ=TQTTであり、Qは雑音の共分散行列である。
【0072】
周波数行列B、第1項のベクトルh、及び第2項のベクトルGは、
【0073】
【数16】
【0074】
であり、ここで、Iは2×2の恒等行列であり、aは角周波数ωを表し、α=cosωであり、Nは現在の時間期間の信号のサンプル数を表す。第1項のベクトル及び第2項のベクトルの要素は、信号のサンプルの関数であり、例えばvα(n)及びvβ(n)はαβ基準領域において求められた時点nにおける信号のサンプルを表す。ここで、n=0,1,…,N−1である。
【0075】
式(10)は、角周波数αの関数に関する一次方程式である。1つの実施の形態は、加重最小二乗(WLS)法を用いて、線形関係から、例えば一次方程式(10)に基づいて周波数を求める。
【0076】
WLS方法は、サンプルN−1に対応する時点における周波数
【0077】
【数17】
【0078】
を、
【0079】
【数18】
【0080】
に従って求めることができる。
【0081】
周波数
【0082】
【数19】
【0083】
の共分散は
【0084】
【数20】
【0085】
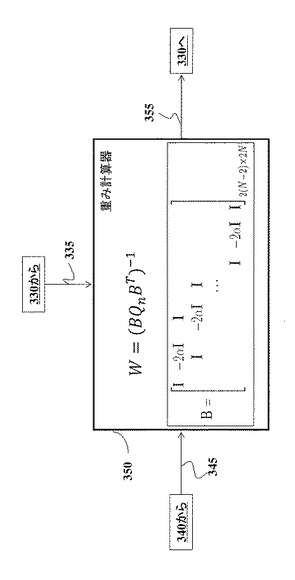
に従って求めることができ、ここで、重み行列Wは
【0086】
【数21】
【0087】
に従って求められ、ここで、Eは雑音の関数の期待値を表し、Tは転置演算子であり、Qnは雑音ベクトルの共分散行列である。
【0088】
図5に示すように、重み計算器350は、前の反復中に求められた雑音及びパラメーターの統計的相関に基づいて反復的に重み行列Wにおける重みを更新する。
【0089】
時点における角周波数
【0090】
【数22】
【0091】
は以下に従って求められる。
【0092】
【数23】
【0093】
時点における信号の周波数
【0094】
【数24】
【0095】
は以下に従って求められる。
【0096】
【数25】
【0097】
ここで、fSはサンプリング周波数である。
【0098】
周波数及び位相角
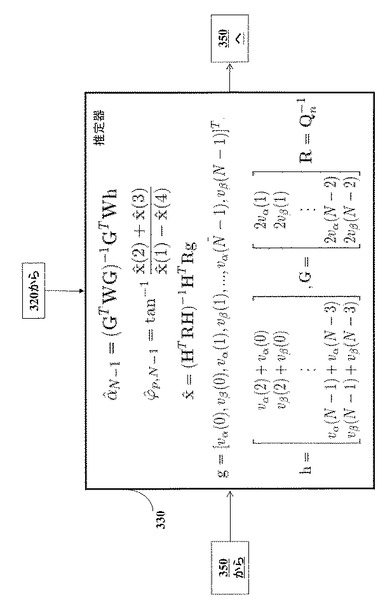
図6は、この発明のいくつかの実施の形態による周波数及び位相角を求める方法のブロック図を示している。
【0099】
時点において求められた周波数に基づいて、正相順の位相角が別のWLS法を用いて求められる。未知のベクトルxは以下に従って規定される。
【0100】
【数26】
【0101】
式(5)に基づいて、周波数ωが知られている場合、xに関する一次方程式を求めることができる。式(5)における周波数ωを
【0102】
【数27】
【0103】
に置き換え、n=0,1,…,N−1についての式を結合することによって、以下に従って、xに関する近似一次方程式が得られる。
【0104】
【数28】
【0105】
ここで、ベクトルgは
【0106】
【数29】
【0107】
であり、行列Hの2n番目の行及び(2n+1)番目の行(ここで、n=0,1,…,N−1)は、
【0108】
【数30】
【0109】
である。
【0110】
式(20)に対するWLS解は以下に従って近似される。
【0111】
【数31】
【0112】
ここで、重み行列Rは
【0113】
【数32】
【0114】
である。
【0115】
近似
【0116】
【数33】
【0117】
が求められた後、時点N−1における式(19)のベクトルxの定義に基づいて正相順成分の初期位相を以下に従って特定することができる。
【0118】
【数34】
【0119】
対応する位相角は以下に従って求められる。
【0120】
【数35】
【0121】
この発明のいくつかの実施の形態は、通常既知である三相電圧信号の基本周波数ω0=2πf0/fSに基づいて第1の反復の周波数を初期化する。このため、まずα0=cosω0を用いて重み行列Wを構築することができる。後続の反復中、ωの推定値を用いて重み行列Wを更新し、次に周波数ωを更新する。
【0122】
発明の効果
この発明のいくつかの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法及びシステムを提供する。振幅及び位相不平衡の双方が検討される。
【0123】
ユーティリティ電力網の位相角を追跡する新規の加重最小二乗に基づく同期方法が提供される。abc自然基準フレーム内で三相電圧信号を処理する代わりに、1つの実施の形態は、変換されたαβ基準領域内で正相順と逆相順とを分離する。
【0124】
αβ領域において取得された式に基づいて、加重最小二乗法は正相順の位相角を推定する。また、逆相順の位相角及び周波数も求められる。この発明のいくつかの実施の形態は、より単純な構造及びより良好な精度を有する。なぜなら、これらの実施の形態は雑音の統計的相関に基づいて重み行列を反復的に調整するためである。
【0125】
この発明の上述した実施の形態は、多数の方法のうちの任意のものにおいて実施することができる。例えば、実施の形態は、ハードウェア、ソフトウェア、又はそれらの組合せを用いて実施することができる。ソフトウェアにおいて実施されるとき、ソフトウェアコードは、単一のコンピューターにおいて提供されようと、複数のコンピューター間で分散されようと、任意の適切なプロセッサ又はプロセッサの集合体において実行することができる。そのようなプロセッサは、集積回路構成要素において1つ又は複数のプロセッサを用いて集積回路として実装することができる。ただし、プロセッサは任意の適切なフォーマットの回路部を用いて実装することができる。
【0126】
さらに、コンピューターは、ラックマウント式コンピューター、デスクトップコンピューター、ラップトップコンピューター、ミニコンピューター、又はタブレットコンピューター等の複数の形態のうちの任意の形態で実装することができることを認識されたい。また、コンピューターは1つ又は複数入出力デバイスを有することができる。そのようなコンピューターは、企業ネットワーク又はインターネット等のローカルエリアネットワーク又はワイドエリアネットワークとしての形態を含む任意の適した形態で1つ又は複数のネットワークによって相互接続することができる。そのようなネットワークは任意の適切な技術に基づくことができ、任意の適切なプロトコルに従って動作することができ、無線ネットワーク、有線ネットワーク、又は光ファイバーネットワークを含むことができる。
【0127】
また、本明細書において概要を述べた様々な方法又はプロセスを、種々のオペレーティングシステム又はプラットフォームのうちの任意のものを用いる1つ又は複数のプロセッサ上で実行可能なソフトウェアとしてコーディングすることができる。それに加えて、そのようなソフトウェアは複数の適切なプログラミング言語及び/又はプログラミングツール若しくはスクリプティングツールのうちの任意のものを用いて書くことができ、フレームワーク又は仮想マシン上で実行される実行可能機械言語又は中間コードとしてコンパイルすることもできる。
【0128】
これに関して、この発明は、コンピューター可読ストレージ媒体又は複数のコンピューター可読媒体、例えばコンピューターメモリ、コンパクトディスク(CD)、光ディスク、デジタルビデオディスク(DVD)、磁気テープ、及びフラッシュメモリとして実施することができる。代替的に、又はそれに加えて、この発明は、伝播信号等の、コンピューター可読ストレージ媒体以外のコンピューター可読媒体として実施することができる。
【0129】
用語「プログラム」又は「ソフトウェア」は、本明細書において、一般的な意味で、コンピューター又は他のプロセッサを、上述したこの発明の様々な態様を実施するようプログラムするように用いることができる任意のタイプのコンピューターコード又はコンピューター実行可能命令セットを指すことができる。
【0130】
コンピューター実行可能命令は、1つ若しくは複数のコンピューター又は他のデバイスによって実行される、プログラムモジュール等の多数の形態をとることができる。一般に、プログラムモジュールは、特定のタスクを実行するか、特定の抽象データ型を実装する、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造を含む。通常、プログラムモジュールの機能は、様々な実施の形態において所望される通りに結合又は分散することができる。
【0131】
また、例が与えられたこの発明の実施の形態は、方法として実施することもできる。方法の一部として実行される動作は、任意の適した形で順序付けすることができる。したがって、実施の形態は、動作が図示されるのと異なる順序で実行されるように構築することができ、これはいくつかの動作が、例示的な実施の形態において連続した動作として示されていても、それらの動作を同時に実行することを含むことができる。
【技術分野】
【0001】
この発明は、包括的には電力網に関し、特に、電力網によって生成された正弦波信号のパラメーターを求めるシステム及び方法に関する。
【背景技術】
【0002】
ユーティリティ電力網における同期は、分散発電機(distributed power generator)が電力網に接続されたときの制御及び操作の目的で重要な問題である。同期は、電力網内の三相電圧信号の位相角を求めることを含む。通常、電力網電圧信号は、理想的な状態から逸脱し、加法性雑音、周波数変動、電圧不平衡、及び高調波成分に起因して歪められる。結果として、そのような歪みを最小にする同期を提供することが望ましい。同様に、電圧信号の周波数及び位相角の高速検出も、電力需要を管理するために分散発電機を再接続又は接続解除するのに重要である。
【0003】
不平衡な三相電圧信号は、正相順、逆相順、及び零相順を含む。通例、同期は正相順の電圧信号の位相角を検出することを必要とする。位相角を検出する複数の従来の方法が開発された。
【0004】
零交差法は最も単純な技法である。しかしながら、この方法は電圧信号の外乱に敏感である。また、位相角は零交差点においてのみ求められ、したがって、この方法は低い動的性能を有する。
【0005】
位相同期回路(PLL)法は、同期回転基準フレームとともに用いることができる。しかしながら、PLL法の性能は、電圧不平衡の存在下で劣化する。なぜなら、逆相順の存在に起因して二重周波数成分が生じるためである。
【0006】
対称成分変換の適用を通じて正相順と逆相順とを分離することに基づいて不平衡に対処するいくつかの方法が開発されている。別の方法は、固定重みベクトルを用いて電圧信号の周波数及び位相角を推定する。しかしながら、この方法は適応的でない。重みは発見的に選択され、したがって、状況によってはこの方法は適切に機能しない。
【発明の概要】
【発明が解決しようとする課題】
【0007】
この発明の目的は、正弦波信号の少なくとも1つのパラメーターを求める方法を提供することである。正弦波信号は、3つの相関する正弦波信号、例えば三相電圧信号又は三相電流信号を含むことができる。パラメーターは、或る時点に、少なくとも信号の周波数、及び信号の位相角、及び信号の振幅を含むことができる。
【0008】
この発明の更なる目的は、加法性雑音等の雑音の存在下で信号のパラメーターを求める方法を提供することである。
【0009】
この発明の更なる目的は、信号のパラメーターを、現在の反復が前の反復中に求められたパラメーターを用いるように経時的に反復的に求める方法を提供することである。この発明のいくつかの実施の形態の反復的に求めることによって、加法性雑音の影響を低減することが可能になる。
【課題を解決するための手段】
【0010】
この発明のいくつかの実施の形態は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間に線形関係が存在するという認識に基づいている。また、雑音のサンプル間にも統計的相関が存在し、これによって線形関係に基づいて信号の周波数を求めることが可能になる。
【発明の効果】
【0011】
この発明のいくつかの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法及びシステムを提供する。振幅及び位相不平衡の双方が検討される。
【図面の簡単な説明】
【0012】
【図1】この発明のいくつかの実施の形態によるシステムのブロック図である。
【図2A】図1のシステムの異なる実施の形態によって実行される様々な動作の一例のフローチャートである。
【図2B】図1のシステムの異なる実施の形態によって実行される様々な動作の別の例のフローチャートである。
【図3】いくつかの実施の形態による、雑音の統計的相関及び適応重みを用いることによって、クラーク変換領域において三相電圧信号の周波数及び位相角を求める方法のブロック図である。
【図4】いくつかの実施の形態によるクラーク変換のブロック図である。
【図5】この発明のいくつかの実施の形態による重み行列における重みを更新する方法のブロック図である。
【図6】この発明のいくつかの実施の形態による周波数及び位相角を求める方法のブロック図である。
【発明を実施するための形態】
【0013】
この発明のいくつかの実施の形態は、信号の周波数と、雑音のサンプルと、信号のサンプルとの間に線形関係が存在するという認識に基づいている。また、雑音のサンプル間にも統計的相関が存在し、これによって線形関係に基づいて信号の周波数を求めることが可能になる。
【0014】
1つの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法を提供する。この実施の形態は、信号の振幅及び位相不平衡の双方を検討する。
【0015】
いくつかの実施の形態では、自然基準フレーム内で三相電圧信号を処理する代わりに、クラーク変換を適用することによって正相順の信号と逆相順の信号とを分離する。次に、雑音のサンプル間の統計的相関を用いて雑音共分散行列の最適な重みが求められる。その最適な重みを用いて、加重最小二乗法を介して信号の周波数及び位相角を求める。
【0016】
したがって、この発明の1つの実施の形態は、信号の少なくとも1つのパラメーターを求める方法であって、該信号は雑音を含む正弦波信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含む方法を開示する。該方法は、
前記信号の前記周波数を、該信号の該周波数と、前記雑音のサンプルと、該信号のサンプルとの間の線形関係に基づいて、前記雑音の前記サンプル間の統計的相関を用いて反復的に求めることを含み、現在の反復は、
前の反復中に求められた前記信号の前記周波数に基づいて前記統計的相関を更新することと、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新することと、を含む。前記信号の前記位相角は該信号の前記周波数に基づいて求めることができる。
【0017】
本方法は、前記信号の基本周波数に基づいて前記統計的相関を初期化することと、該統計的相関を用いて重み行列を求めることと、前記信号に離散発振器を作用させて信号のサンプルを得ることと、クラーク変換を用いて信号をクラーク基準領域に変換することと、のうちの1つ又はそれらの組合せも含むことができる。
【0018】
様々な実施の形態において、前記線形関係は、前記雑音に起因する誤差、雑音ベクトル、周波数行列、第1項のベクトル、第2項のベクトルに基づいて規定され、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である。
【0019】
本方法の反復は或る時間期間にわたって実行することができる。いくつかの時間期間は重複することができる。それに加えて、又は代替的に、現在の反復の現在の時間期間は前の反復の前の時間期間に隣り合うことができる。
【0020】
別の実施の形態は、信号の少なくとも1つのパラメーターを求めるシステムであって、該信号は雑音を含む三相電圧信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含むシステムを開示する。該システムは、
時間期間ごとに前記信号のサンプルを求める離散発振器と、
前記時間期間ごとに前記信号の前記周波数を、該信号の該周波数と、前記雑音と、該信号のサンプルとの間の線形関係に基づいて反復的に求めるプロセッサであって、該プロセッサは現在の反復中に、
前の反復中に求められた前記信号の前記周波数に基づいて前記雑音共分散行列を更新し、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新し、
前記雑音共分散行列及び前記信号の前記サンプルを用いて前記周波数を求める、
ものと、を備える。
【0021】
プロセッサは、信号の周波数に基づいて信号の位相角を求め、加重最小二乗方を用いて雑音共分散行列を更新するように構成することもできる。
【0022】
図1は、信号110の少なくとも1つのパラメーターを求めるシステムを示している。信号は雑音を含む電圧信号である。パラメーターは、或る時点における信号の周波数及び該時点における信号の位相角のうちの少なくとも一方を含む。システムは、時間期間115〜117ごとに信号110のサンプル140を求める離散発振器120(discrete oscillator)を備える。いくつかの実施の形態では、離散発振器120は、信号の同期した、すなわちクロック制御された、離散時間型で、離散値型のサンプルを求めるように構成された任意の数値制御型発振器とすることができる。
【0023】
システムは、時間期間ごとに、信号の周波数と、雑音のサンプル150と、信号のサンプル140との間の線形関係135に基づいて信号110の周波数160を反復的に求める(130)プロセッサ101も備える。様々な実施の形態において、求めること(130)は、雑音のサンプル間の統計的相関170を用いる。
【0024】
線形関係は、
【0025】
【数1】
【0026】
に従って規定され、ここで、ζは雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、第1項のベクトル及び第2項のベクトルの要素は信号のサンプルの関数である。線形関係のいくつかの解を以下に説明する。
【0027】
求めること(130)の反復は時間期間にわたって実行され、少なくともいくつかの時間期間115及び116が重複している。それに加えて、又は代替的に、現在の反復の現在の時間期間117は前の反復の前の時間期間116に隣り合うことができる。
【0028】
図2A及び図2Bは、この発明の様々な実施の形態による反復の例を示している。例えば、図2Aに示す1つの実施の形態による現在の反復は、前の反復中に求められた信号の周波数160に基づいて統計的相関170を更新すること(210)、及び信号のサンプル140を、現在の時間期間中の信号の値を用いて更新すること(220)を含む。更新された統計的相関及びサンプルに基づいて、実施の形態は線形関係135を用いて周波数160を更新する(230)。
【0029】
図2Bに示す別の実施の形態は、統計的相関170を用いて雑音共分散行列を求める。この実施の形態では、反復ごとに、前の反復中に求められた信号の周波数に基づいて雑音共分散行列を更新し(250)、信号のサンプルを、現在の時間期間中の信号の値を用いて更新し(220)、周波数を、雑音共分散行列及び信号のサンプルを用いて更新する(260)。
【0030】
いくつかの実施の形態では、第1の反復の場合、周波数は信号の基本周波数である。例えば、公称周波数に基づいて統計的相関及び/又は雑音共分散行列が初期化される。また、いくつかの実施の形態では、或る時点の信号の周波数に基づいて信号の位相角が求められる(240)。
【0031】
図3は、この発明の1つの実施の形態による雑音及び適応重み355の統計的相関345を用いることによって、クラーク変換領域において三相電圧信号310の周波数及び位相角335を求める方法300のブロック図を示している。信号310はユーティリティ電力網からの信号とすることができる。実施の形態は、周波数及び位相角を反復的に求めるために加重最小二乗法330を用いる。
【0032】
電力網の三相電圧信号310は、電力網内の同期のために測定することができる。電圧不平衡の存在下では、三相電圧信号310は、以下のように表されるabc基準領域における加法性雑音によって歪められる。
【0033】
【数2】
【0034】
ここで、nはi=a,b,cの場合の時点であり、Viは信号の振幅であり、φiは位相iの初期位相角であり、wは信号の角周波数であり、w=2πf/fsであり、ここで、fは信号の周波数であり、fsはサンプリング周波数であり、eは加法性雑音である。
【0035】
時点nにおける加法性雑音は
【0036】
【数3】
【0037】
であり、ここで、Tは転置演算子、例えば転置演算子400である。いくつかの実施の形態では、雑音は共分散行列Qを有する零平均ガウス確率ベクトルを含む。いくつかの実施の形態では、異なる時点における雑音ベクトルは相関していない。
【0038】
フォーテスキューの定理によれば、三相電圧信号310は以下のように書き変えることができる。
【0039】
【数4】
【0040】
ここで、vp(n)は正相順pを表し、vn(n)は逆相順nを表し、及びv0(n)は零相順を表し、それぞれ以下によって規定される。
【0041】
【数5】
【0042】
ここで、Vi及びθi(n)(ここで、i=q,n,0)はそれぞれ各相順の振幅及び位相角である。
【0043】
この発明の1つの実施の形態によれば、位相角θp(n)の推定値330は、
a.例えばクラーク変換行列400を用いて、クラーク基準領域において、三相電圧信号310をαβ基準信号410に変換するステップ320と、
公称動作状態から統計的相関特性を得て(340)雑音共分散行列345を求めるステップと、
加重最小二乗法を用いて、信号のパラメーター及びαβ基準信号の対応する直交位相信号を求めるステップであって、重み計算器によって返される重み355を反復的に用いる、求めるステップと、
b.信号の他のパラメーターに対する位相角の関係に基づいて正相順の位相角を求めるステップと、
によって得られる。
【0044】
クラーク変換
図4に示すように、式(1)に従って規定された信号にクラーク変換320を適用した後、αβ基準領域における対応する信号325は、
【0045】
【数6】
【0046】
となり、ここで、
【0047】
【数7】
【0048】
はクラーク変換行列400である。
【0049】
このとき、結果としてのαβ基準フレーム信号325は以下によって表すことができる。
【0050】
【数8】
【0051】
雑音ベクトルの共分散eαβ(n)=[eα(n),eβ(n)]TはQαβ=TQTTとして表される。
【0052】
いくつかの実施の形態は、クラーク変換を適用して零相順を取り除き、未知のパラメーターの数を2だけ減らす。式(4)における未知のパラメーター数は減らされるが、式(4)は依然として2つの正弦波信号、すなわち正相順及び逆相順のパラメーターを含み、未知のパラメーターに関して非線形である。
【0053】
しかしながら、正相順及び逆相順は同じ周波数を有し、信号325は以下に従って規定することができる。
【0054】
【数9】
【0055】
式(5)から、αβ領域内の各位相は、雑音で歪められた1つの正弦波信号しか含まないことを見てとることができる。問題は、単一トーンの正弦波信号のパラメーターを推定することとなる。パラメーターVi及びφi(ここで、i=α,β)が信号vα(n)及びvβ(n)から求められた後、位相角θp(n)を式(5)に基づいて求めることができる。
【0056】
加重最小二乗法
いくつかの実施の形態では、信号の周波数は、離散発振器に基づいて抽出され、加重最小二乗(WLS)法を用いて反復的に求められる。例えば、1つの実施の形態は雑音のサンプルの統計的相関345を用いて、反復ごとに雑音共分散行列355を更新し、これによって周波数推定の性能が改善する。特に、離散発振器によれば、未知の周波数ω、振幅V、及び初期位相φを有する正弦波信号v(n)=Vcos(nω+φ)について、ωと連続3つ組v(n)、v(n−1)、及びv(n−2)との間の以下の関係が有効である。
【0057】
【数10】
【0058】
信号の3つのサンプルを所与とすると、信号の周波数は以下に従って求めることができる。
【0059】
【数11】
【0060】
しかしながら、式(7)は、正弦波信号が雑音を含むときに機能しない。また、分母が零に非常に近いときに数値的悪条件が存在する。しかしながら、出願人らは、信号の雑音成分の統計的相関によって上述した問題を克服することが可能になることを認識している。
【0061】
式(5)の信号の双方のパラメーター、例えば振幅及び周波数が未知であり、経時的に低速に変動するので、いくつかの実施の形態では、或る特定の数のサンプルにわたってパラメーターが区分的に定数であるとみなす。例えば、n=0,1,…,N−1であり、Nは4以上である。
【0062】
したがって、離散発振器は、式(5)の3行目及び6行目に適用することができ、雑音項は以下に従って考慮に入れられる。
【0063】
【数12】
【0064】
ここで、雑音項ζα(n)及びζβ(n)は
【0065】
【数13】
【0066】
として与えられる。
【0067】
角周波数ωは、α=cosωに含まれる。n=2,3,…,N−1について式(8a)及び式(8b)を結合することによって、結果として
【0068】
【数14】
【0069】
となる。ここで、nは共分散行列Qnを有する雑音ベクトルであり、
【0070】
【数15】
【0071】
に従って求められ、共分散行列Qn=diag(Qαβ,Qαβ,…,Qαβ)である。eαβ(n)及びQαβ=TQTTであり、Qは雑音の共分散行列である。
【0072】
周波数行列B、第1項のベクトルh、及び第2項のベクトルGは、
【0073】
【数16】
【0074】
であり、ここで、Iは2×2の恒等行列であり、aは角周波数ωを表し、α=cosωであり、Nは現在の時間期間の信号のサンプル数を表す。第1項のベクトル及び第2項のベクトルの要素は、信号のサンプルの関数であり、例えばvα(n)及びvβ(n)はαβ基準領域において求められた時点nにおける信号のサンプルを表す。ここで、n=0,1,…,N−1である。
【0075】
式(10)は、角周波数αの関数に関する一次方程式である。1つの実施の形態は、加重最小二乗(WLS)法を用いて、線形関係から、例えば一次方程式(10)に基づいて周波数を求める。
【0076】
WLS方法は、サンプルN−1に対応する時点における周波数
【0077】
【数17】
【0078】
を、
【0079】
【数18】
【0080】
に従って求めることができる。
【0081】
周波数
【0082】
【数19】
【0083】
の共分散は
【0084】
【数20】
【0085】
に従って求めることができ、ここで、重み行列Wは
【0086】
【数21】
【0087】
に従って求められ、ここで、Eは雑音の関数の期待値を表し、Tは転置演算子であり、Qnは雑音ベクトルの共分散行列である。
【0088】
図5に示すように、重み計算器350は、前の反復中に求められた雑音及びパラメーターの統計的相関に基づいて反復的に重み行列Wにおける重みを更新する。
【0089】
時点における角周波数
【0090】
【数22】
【0091】
は以下に従って求められる。
【0092】
【数23】
【0093】
時点における信号の周波数
【0094】
【数24】
【0095】
は以下に従って求められる。
【0096】
【数25】
【0097】
ここで、fSはサンプリング周波数である。
【0098】
周波数及び位相角
図6は、この発明のいくつかの実施の形態による周波数及び位相角を求める方法のブロック図を示している。
【0099】
時点において求められた周波数に基づいて、正相順の位相角が別のWLS法を用いて求められる。未知のベクトルxは以下に従って規定される。
【0100】
【数26】
【0101】
式(5)に基づいて、周波数ωが知られている場合、xに関する一次方程式を求めることができる。式(5)における周波数ωを
【0102】
【数27】
【0103】
に置き換え、n=0,1,…,N−1についての式を結合することによって、以下に従って、xに関する近似一次方程式が得られる。
【0104】
【数28】
【0105】
ここで、ベクトルgは
【0106】
【数29】
【0107】
であり、行列Hの2n番目の行及び(2n+1)番目の行(ここで、n=0,1,…,N−1)は、
【0108】
【数30】
【0109】
である。
【0110】
式(20)に対するWLS解は以下に従って近似される。
【0111】
【数31】
【0112】
ここで、重み行列Rは
【0113】
【数32】
【0114】
である。
【0115】
近似
【0116】
【数33】
【0117】
が求められた後、時点N−1における式(19)のベクトルxの定義に基づいて正相順成分の初期位相を以下に従って特定することができる。
【0118】
【数34】
【0119】
対応する位相角は以下に従って求められる。
【0120】
【数35】
【0121】
この発明のいくつかの実施の形態は、通常既知である三相電圧信号の基本周波数ω0=2πf0/fSに基づいて第1の反復の周波数を初期化する。このため、まずα0=cosω0を用いて重み行列Wを構築することができる。後続の反復中、ωの推定値を用いて重み行列Wを更新し、次に周波数ωを更新する。
【0122】
発明の効果
この発明のいくつかの実施の形態は、電圧不平衡の存在下で電力網内の三相電圧信号を同期して該信号の位相角を求める方法及びシステムを提供する。振幅及び位相不平衡の双方が検討される。
【0123】
ユーティリティ電力網の位相角を追跡する新規の加重最小二乗に基づく同期方法が提供される。abc自然基準フレーム内で三相電圧信号を処理する代わりに、1つの実施の形態は、変換されたαβ基準領域内で正相順と逆相順とを分離する。
【0124】
αβ領域において取得された式に基づいて、加重最小二乗法は正相順の位相角を推定する。また、逆相順の位相角及び周波数も求められる。この発明のいくつかの実施の形態は、より単純な構造及びより良好な精度を有する。なぜなら、これらの実施の形態は雑音の統計的相関に基づいて重み行列を反復的に調整するためである。
【0125】
この発明の上述した実施の形態は、多数の方法のうちの任意のものにおいて実施することができる。例えば、実施の形態は、ハードウェア、ソフトウェア、又はそれらの組合せを用いて実施することができる。ソフトウェアにおいて実施されるとき、ソフトウェアコードは、単一のコンピューターにおいて提供されようと、複数のコンピューター間で分散されようと、任意の適切なプロセッサ又はプロセッサの集合体において実行することができる。そのようなプロセッサは、集積回路構成要素において1つ又は複数のプロセッサを用いて集積回路として実装することができる。ただし、プロセッサは任意の適切なフォーマットの回路部を用いて実装することができる。
【0126】
さらに、コンピューターは、ラックマウント式コンピューター、デスクトップコンピューター、ラップトップコンピューター、ミニコンピューター、又はタブレットコンピューター等の複数の形態のうちの任意の形態で実装することができることを認識されたい。また、コンピューターは1つ又は複数入出力デバイスを有することができる。そのようなコンピューターは、企業ネットワーク又はインターネット等のローカルエリアネットワーク又はワイドエリアネットワークとしての形態を含む任意の適した形態で1つ又は複数のネットワークによって相互接続することができる。そのようなネットワークは任意の適切な技術に基づくことができ、任意の適切なプロトコルに従って動作することができ、無線ネットワーク、有線ネットワーク、又は光ファイバーネットワークを含むことができる。
【0127】
また、本明細書において概要を述べた様々な方法又はプロセスを、種々のオペレーティングシステム又はプラットフォームのうちの任意のものを用いる1つ又は複数のプロセッサ上で実行可能なソフトウェアとしてコーディングすることができる。それに加えて、そのようなソフトウェアは複数の適切なプログラミング言語及び/又はプログラミングツール若しくはスクリプティングツールのうちの任意のものを用いて書くことができ、フレームワーク又は仮想マシン上で実行される実行可能機械言語又は中間コードとしてコンパイルすることもできる。
【0128】
これに関して、この発明は、コンピューター可読ストレージ媒体又は複数のコンピューター可読媒体、例えばコンピューターメモリ、コンパクトディスク(CD)、光ディスク、デジタルビデオディスク(DVD)、磁気テープ、及びフラッシュメモリとして実施することができる。代替的に、又はそれに加えて、この発明は、伝播信号等の、コンピューター可読ストレージ媒体以外のコンピューター可読媒体として実施することができる。
【0129】
用語「プログラム」又は「ソフトウェア」は、本明細書において、一般的な意味で、コンピューター又は他のプロセッサを、上述したこの発明の様々な態様を実施するようプログラムするように用いることができる任意のタイプのコンピューターコード又はコンピューター実行可能命令セットを指すことができる。
【0130】
コンピューター実行可能命令は、1つ若しくは複数のコンピューター又は他のデバイスによって実行される、プログラムモジュール等の多数の形態をとることができる。一般に、プログラムモジュールは、特定のタスクを実行するか、特定の抽象データ型を実装する、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造を含む。通常、プログラムモジュールの機能は、様々な実施の形態において所望される通りに結合又は分散することができる。
【0131】
また、例が与えられたこの発明の実施の形態は、方法として実施することもできる。方法の一部として実行される動作は、任意の適した形で順序付けすることができる。したがって、実施の形態は、動作が図示されるのと異なる順序で実行されるように構築することができ、これはいくつかの動作が、例示的な実施の形態において連続した動作として示されていても、それらの動作を同時に実行することを含むことができる。
【特許請求の範囲】
【請求項1】
信号の少なくとも1つのパラメーターを求める方法であって、該信号は雑音を含む正弦波信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含み、該方法は、
前記信号の前記周波数を、該信号の該周波数と、前記雑音のサンプルと、該信号のサンプルとの間の線形関係に基づいて、前記雑音の前記サンプル間の統計的相関を用いて反復的に求めるステップであって、現在の反復が、
前の反復中に求められた前記信号の前記周波数に基づいて前記統計的相関を更新するステップと、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新するステップと、
を有するものを含む、該方法の前記ステップはプロセッサによって実行される、信号の少なくとも1つのパラメーターを求める方法。
【請求項2】
前記信号の基本周波数に基づいて前記統計的相関を初期化するステップ
を更に含む、請求項1に記載の方法。
【請求項3】
前記信号の前記周波数に基づいて前記信号の前記位相角を求めるステップ
を更に含む、請求項1に記載の方法。
【請求項4】
前記統計的相関を用いて重み行列を求めるステップ
を更に含む、請求項1に記載の方法。
【請求項5】
前記信号に離散発振器を作用させて、前記信号のサンプルを得る、離散発振器を作用させるステップ
を更に含む、請求項1に記載の方法。
【請求項6】
前記信号は三相電圧信号を含み、前記方法は、
前記信号をクラーク変換を用いてクラーク基準領域に変換するステップ
を更に含む、請求項1に記載の方法。
【請求項7】
前記線形関係は、
【数1】
に従って規定され、ここで、ζは前記雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である、請求項1に記載の方法。
【請求項8】
前記周波数行列Bは、
【数2】
であり、ここで、Iは恒等行列であり、Nは前記信号の前記サンプルの数を表し、前記第1項のベクトルhは、
【数3】
であり、ここで、vα(n)及びvβ(n)はαβ基準領域において求められた時点nにおける前記信号のサンプルを表し、ここで、n=0,1,…,N−1であり、前記第2項のベクトルGは
【数4】
である、請求項7に記載の方法。
【請求項9】
加重最小二乗(WLS)法を用いて前記線形関係から前記周波数を求めるステップ
を更に含む、請求項8に記載の方法。
【請求項10】
前記サンプルN−1に対応する時点における前記周波数
【数5】
を、
【数6】
に従って求めるステップであって、ここで、前記周波数
【数7】
の共分散は
【数8】
に従って求められ、ここで、重み行列Wは
【数9】
に従って求められ、ここで、Eは前記雑音の関数の期待値を表し、Tは転置演算子であり、Qnは前記雑音ベクトルの共分散行列であるものと、
前記時点における前記信号の前記周波数
【数10】
を
【数11】
に従って求めるステップであって、ここで、fSはサンプリング周波数であり、
【数12】
は前記時点における前記角周波数
【数13】
であるものと、
を更に含む、請求項9に記載の方法。
【請求項11】
前記角周波数
【数14】
に基づいて前記位相角を求めるステップ、
を更に含む、請求項10に記載の方法。
【請求項12】
近似一次方程式
【数15】
に基づいて前記位相角を求めるステップであって、未知のベクトルxは
【数16】
であり、ベクトルgは
【数17】
であり、行列Hは
【数18】
であり、前記未知のベクトルxは
【数19】
に従って近似され、ここで、重み行列Rは
【数20】
であるもの
を更に含む、請求項11に記載の方法。
【請求項13】
前記位相角を求めるステップは、
前記信号の正相順pの初期位相
【数21】
を
【数22】
に従って求めるステップと、
前記位相角
【数23】
を
【数24】
に従って求めるステップと、
を更に含む、請求項12に記載の方法。
【請求項14】
前記各反復は或る時間期間にわたって実行され、少なくともいくつかの時間期間が重複している、請求項1に記載の方法。
【請求項15】
前記各反復は或る時間期間にわたって実行され、前記現在の反復の前記現在の時間期間は前記前の反復の前の時間期間に隣り合っている、請求項1に記載の方法。
【請求項16】
信号の少なくとも1つのパラメーターを求めるシステムであって、該信号は雑音を含む三相電圧信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含み、該システムは、
時間期間ごとに前記信号のサンプルを求める離散発振器と、
前記時間期間ごとに前記信号の前記周波数を、該信号の該周波数と、前記雑音と、該信号のサンプルとの間の線形関係に基づいて反復的に求めるプロセッサであって、該プロセッサは現在の反復中に、
前の反復中に求められた前記信号の前記周波数に基づいて雑音共分散行列を更新し、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新し、
前記雑音共分散行列及び前記信号の前記サンプルを用いて前記周波数を求める、
ものを備える、信号の少なくとも1つのパラメーターを求めるシステム。
【請求項17】
前記プロセッサは前記信号の前記周波数に基づいて前記信号の前記位相角を求めるように構成される、請求項16に記載のシステム。
【請求項18】
前記信号はクラーク基準領域に変換される、請求項16に記載のシステム。
【請求項19】
前記プロセッサは加重最小二乗(WLS)法を用いて前記雑音共分散行列を更新する、請求項16に記載のシステム。
【請求項20】
前記線形関係は、
【数25】
に従って規定され、ここで、ζは前記雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である、請求項16に記載のシステム。
【請求項1】
信号の少なくとも1つのパラメーターを求める方法であって、該信号は雑音を含む正弦波信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含み、該方法は、
前記信号の前記周波数を、該信号の該周波数と、前記雑音のサンプルと、該信号のサンプルとの間の線形関係に基づいて、前記雑音の前記サンプル間の統計的相関を用いて反復的に求めるステップであって、現在の反復が、
前の反復中に求められた前記信号の前記周波数に基づいて前記統計的相関を更新するステップと、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新するステップと、
を有するものを含む、該方法の前記ステップはプロセッサによって実行される、信号の少なくとも1つのパラメーターを求める方法。
【請求項2】
前記信号の基本周波数に基づいて前記統計的相関を初期化するステップ
を更に含む、請求項1に記載の方法。
【請求項3】
前記信号の前記周波数に基づいて前記信号の前記位相角を求めるステップ
を更に含む、請求項1に記載の方法。
【請求項4】
前記統計的相関を用いて重み行列を求めるステップ
を更に含む、請求項1に記載の方法。
【請求項5】
前記信号に離散発振器を作用させて、前記信号のサンプルを得る、離散発振器を作用させるステップ
を更に含む、請求項1に記載の方法。
【請求項6】
前記信号は三相電圧信号を含み、前記方法は、
前記信号をクラーク変換を用いてクラーク基準領域に変換するステップ
を更に含む、請求項1に記載の方法。
【請求項7】
前記線形関係は、
【数1】
に従って規定され、ここで、ζは前記雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である、請求項1に記載の方法。
【請求項8】
前記周波数行列Bは、
【数2】
であり、ここで、Iは恒等行列であり、Nは前記信号の前記サンプルの数を表し、前記第1項のベクトルhは、
【数3】
であり、ここで、vα(n)及びvβ(n)はαβ基準領域において求められた時点nにおける前記信号のサンプルを表し、ここで、n=0,1,…,N−1であり、前記第2項のベクトルGは
【数4】
である、請求項7に記載の方法。
【請求項9】
加重最小二乗(WLS)法を用いて前記線形関係から前記周波数を求めるステップ
を更に含む、請求項8に記載の方法。
【請求項10】
前記サンプルN−1に対応する時点における前記周波数
【数5】
を、
【数6】
に従って求めるステップであって、ここで、前記周波数
【数7】
の共分散は
【数8】
に従って求められ、ここで、重み行列Wは
【数9】
に従って求められ、ここで、Eは前記雑音の関数の期待値を表し、Tは転置演算子であり、Qnは前記雑音ベクトルの共分散行列であるものと、
前記時点における前記信号の前記周波数
【数10】
を
【数11】
に従って求めるステップであって、ここで、fSはサンプリング周波数であり、
【数12】
は前記時点における前記角周波数
【数13】
であるものと、
を更に含む、請求項9に記載の方法。
【請求項11】
前記角周波数
【数14】
に基づいて前記位相角を求めるステップ、
を更に含む、請求項10に記載の方法。
【請求項12】
近似一次方程式
【数15】
に基づいて前記位相角を求めるステップであって、未知のベクトルxは
【数16】
であり、ベクトルgは
【数17】
であり、行列Hは
【数18】
であり、前記未知のベクトルxは
【数19】
に従って近似され、ここで、重み行列Rは
【数20】
であるもの
を更に含む、請求項11に記載の方法。
【請求項13】
前記位相角を求めるステップは、
前記信号の正相順pの初期位相
【数21】
を
【数22】
に従って求めるステップと、
前記位相角
【数23】
を
【数24】
に従って求めるステップと、
を更に含む、請求項12に記載の方法。
【請求項14】
前記各反復は或る時間期間にわたって実行され、少なくともいくつかの時間期間が重複している、請求項1に記載の方法。
【請求項15】
前記各反復は或る時間期間にわたって実行され、前記現在の反復の前記現在の時間期間は前記前の反復の前の時間期間に隣り合っている、請求項1に記載の方法。
【請求項16】
信号の少なくとも1つのパラメーターを求めるシステムであって、該信号は雑音を含む三相電圧信号であり、前記パラメーターは、或る時点における前記信号の周波数、及び該時点における該信号の位相角のうちの少なくとも一方を含み、該システムは、
時間期間ごとに前記信号のサンプルを求める離散発振器と、
前記時間期間ごとに前記信号の前記周波数を、該信号の該周波数と、前記雑音と、該信号のサンプルとの間の線形関係に基づいて反復的に求めるプロセッサであって、該プロセッサは現在の反復中に、
前の反復中に求められた前記信号の前記周波数に基づいて雑音共分散行列を更新し、
前記信号の前記サンプルを、現在の時間期間中の前記信号の値を用いて更新し、
前記雑音共分散行列及び前記信号の前記サンプルを用いて前記周波数を求める、
ものを備える、信号の少なくとも1つのパラメーターを求めるシステム。
【請求項17】
前記プロセッサは前記信号の前記周波数に基づいて前記信号の前記位相角を求めるように構成される、請求項16に記載のシステム。
【請求項18】
前記信号はクラーク基準領域に変換される、請求項16に記載のシステム。
【請求項19】
前記プロセッサは加重最小二乗(WLS)法を用いて前記雑音共分散行列を更新する、請求項16に記載のシステム。
【請求項20】
前記線形関係は、
【数25】
に従って規定され、ここで、ζは前記雑音に起因する誤差を表し、nは雑音ベクトルであり、Bは周波数行列であり、hは第1項のベクトルであり、Gは第2項のベクトルであり、αは角周波数ωを表し、α=cosωであり、ここで、前記第1項のベクトル及び前記第2項のベクトルの要素は前記信号の前記サンプルの関数である、請求項16に記載のシステム。
【図1】

【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−211896(P2012−211896A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−50253(P2012−50253)
【出願日】平成24年3月7日(2012.3.7)
【出願人】(597067574)ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド (484)
【住所又は居所原語表記】201 BROADWAY, CAMBRIDGE, MASSACHUSETTS 02139, U.S.A.
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−50253(P2012−50253)
【出願日】平成24年3月7日(2012.3.7)
【出願人】(597067574)ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド (484)
【住所又は居所原語表記】201 BROADWAY, CAMBRIDGE, MASSACHUSETTS 02139, U.S.A.
【Fターム(参考)】
[ Back to top ]