
正確な位置決め及び位置アドレス確認方法
本発明は正確な位置決め及び位置アドレス確認方法を提供する。該方法は、S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、プリンタキャリアの各区域の真ん中に、品物保存位置情報が含まれているメインバーコードを印刷し、S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置し、S3:ロボットハンドのスキャンビームがちょうど該保管棚品物保存部に対応する区域のメインバーコードに重畳される場合に、該メインバーコードに含まれている品物保存位置情報をスキャンして読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含める。本発明は単冊の図書、CD、または小さなサイズの類似する品物の自動アクセスシステムに適用されるものであり、品物のアクセス位置に対して、水平方向及び/または高さ方向において迅速に、正確に位置を決めること及び位置アドレスを確認することができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、単冊の図書、CDなど小さなサイズの品物または類似の品物に使用される正確な位置決め及び位置アドレス確認方法に関する。
【背景技術】
【0002】
現在、市場において、図書の自動アクセスシステムは、主に北アメリカ、ヨーロッパ及び日本などの先進国で応用されている。しかし、使用されている図書の自動アクセスシステムは、単冊の図書の自動アクセスシステムではなく、複数冊の図書を人手で箱に纏めて収納し、図書が収納された箱を、スタッカーで自動的に保管棚に保存する。読者が書籍を借りる場合には、スタッカーで箱単位で図書を保管棚から持ち出し、人手で読者所望の図書をその箱から持ち出して読者に渡す必要がある。このような図書の自動アクセスシステムは完全な自動化が実現できず、即ち、無人の操作が実現できない。
【0003】
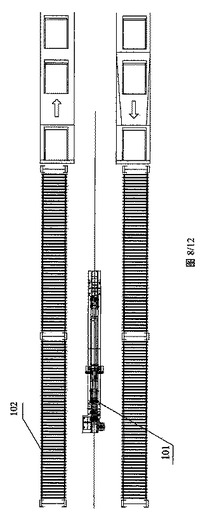
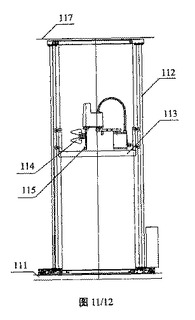
従来技術として、単冊の図書またはCDなど小さなサイズの品物に適用されるアクセスシステムが公開されている。当該システムは、図8に示すように、主に、横梁103と立柱104と傾斜ドローバーなどから構成され、且つ中には品物保存部が設置されている保管棚102と、二列の保管棚102の間に設置されているスタッカー101とを具備して構成されている。図11はスタッカー101を模式的に示す構成図であり、スタッカー101は、地レール111と天レール117の間をスライドするように設置され、主に立柱112と、立柱112を上下スライドするリフト113と、リフト113に設置されているロボットハンド114から構成され、スタッカー101が上位機からの指令を受信して、保管棚102に保存されている品物に対してアクセス操作を行う場合に、まず、地レール111と天レール117に沿って対応する保管棚102の品物保存部の前方までスライドし、ロボットハンド114がリフト113に対して伸びるまたは縮むことにより、品物に対してのアクセス動作を完了する。しかし、保管棚102の取付誤差と、スタッカー101の移動などの誤差とにより、スタッカー101のロボットハンド114は異なるアクセス状況に対して、アクセスしようとする保管棚の品物保存部の真正面まで正確に移動することができないので、迅速に、効果的にアクセスできず、または誤アクセスする状況がある。
【発明の概要】
【課題を解決するための手段】
【0004】
本発明の目的は、従来技術の上記の課題を解決するために、保管棚に保存した品物に対して、迅速に、効果的に、正確に位置を決めること及び位置アドレスを確認することができる方法を提供することにある。
【0005】
本発明は上記目的を達成する為に、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0006】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されている。
【0007】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0008】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームがちょうど該保管棚品物保存部に対応する区域のメインバーコードに重畳される場合に、該メインバーコードをスキャンして、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0009】
S4:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0010】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0011】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように且つロボットハンドのスキャンビームの長さより小さいように設定する。
【0012】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0013】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0014】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0015】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、中上バーコードと中下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0016】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0017】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0018】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0019】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
【0020】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0021】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0022】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0023】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの左側に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
【0024】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0025】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコードをスキャンした場合に、該左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコードをスキャンした場合に、該右減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0026】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0027】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0028】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0029】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動する。
【0030】
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0031】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0032】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中に、品物保存位置情報が含まれているメインバーコードを印刷し、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの左側において、左上バーコードと左下バーコードとの間に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側において、右上バーコードと右下バーコードとの間に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0033】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0034】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコードをスキャンした場合に、左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコードをスキャンした場合に、右減速バーコードに含まれている減速情報に基づいて減速しながら移動する。
【0035】
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0036】
前記バーコードは1次元コードまたは2次元コードからなることが好ましい。
【0037】
前記プリンタキャリアは保管棚の横梁に水平に設置され、または保管棚の立柱に垂直に設置され、または、保管棚の別の相応箇所に水平または垂直に設置されることが好ましい。
【図面の簡単な説明】
【0038】
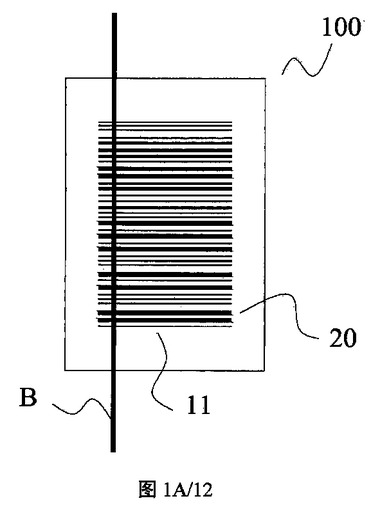
【図1A】本発明の実施例1にかかるプリンタキャリアの区域の構成図である。
【図1B】本発明の実施例1にかかるプリンタキャリアの区域の構成図である。
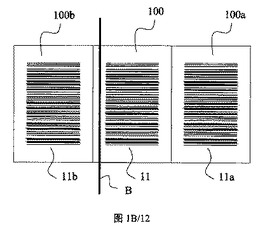
【図2】本発明の実施例2にかかるプリンタキャリアの区域の構成図である。
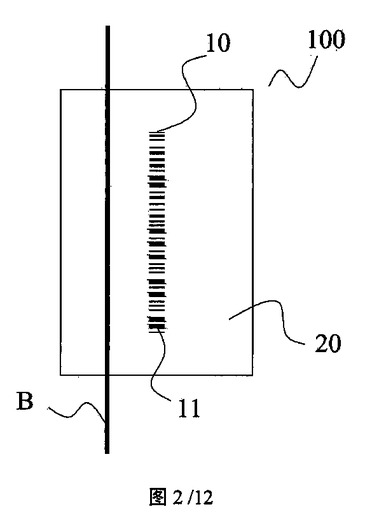
【図3】本発明の実施例3にかかるプリンタキャリアの区域の構成図である。
【図4】本発明の実施例4にかかるプリンタキャリアの区域の構成図である。
【図5】本発明の実施例5にかかるプリンタキャリアの区域の構成図である。
【図6】本発明の実施例6にかかるプリンタキャリアの区域の構成図である。
【図7】本発明の実施例7にかかるプリンタキャリアの区域の構成図である。
【図8】本発明が適用される単冊の図書またはCDなど小さなサイズの品物のアクセスシステムの上面図である。
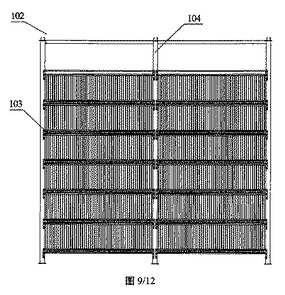
【図9】図8の保管棚の正面図である。
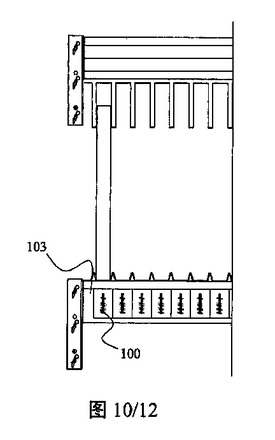
【図10】図9の保管棚のある層を模式的に示す拡大図である。
【図11】スタッカーを模式的に示す構成図である。
【図12】本発明にかかるプリンタキャリアを模式的に示す図である。
【発明を実施するための形態】
【0039】
本発明にかかるバーコードは1次元コードまたは2次元コードを使用することができる。以下の実施例において、1次元コードを使用する状況だけについて紹介する。
【0040】
以下、図8、9、10に示すように、本発明にかかるプリンタキャリア200が保管棚102の横梁103に水平に設置された状況、即ち、図12のプリンタキャリアが図10の保管棚102の横梁103に設置された状況について説明する。
【0041】
実施例1.
図1は、本実施例にかかるプリンタキャリア200の区域100の構成図である。
【0042】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0043】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、プリンタキャリア200の各区域100の真ん中には、品物保存位置情報が含まれているメインバーコード11を印刷する。
【0044】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0045】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115がちょうど該保管棚品物保存部に対応する区域100のメインバーコードに重畳される場合に、該メインバーコード11をスキャンして、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする(図1Aを参照)。
【0046】
S4:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動して、スタッカー101に設置されたロボットハンドのスキャンビーム115が保管棚品物保存部に対応する区域100のメインバーコード11に重畳されない場合に、予定のプログラムによって、該メインバーコード11の方向または該区域100に隣り合う別の区域100bのメインバーコード11bの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする(図1Bを参照)。
【0047】
本実施例のプリンタキャリア200は、位置アドレス確認だけを必要とする状況に適用することができる。
【0048】
実施例2.
図2は、本発明の実施例2にかかるプリンタキャリアの区域の構成図である。
【0049】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0050】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、長さをロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0051】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0052】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が該保管棚品物保存部に対応する区域100のメインバーコード11に重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、メインバーコード11の方向または該区域100に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0053】
本実施例は保管棚品物保存部の幅が狭くて、迅速に、水平に、正確に位置を決める状況に適用することができる。
【0054】
実施例3.
図3は、本発明の実施例3にかかるプリンタキャリアの区域の構成図である。
【0055】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0056】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、中上バーコード21と中下バーコード22との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0057】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0058】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115は、
該保管棚品物保存部に対応する区域100の中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域100の中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中下バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0059】
本実施例は保管棚品物保存部の幅が狭くて、水平及び高さ方向において、迅速に、正確に位置を決める状況に適用することができる。
【0060】
実施例4.
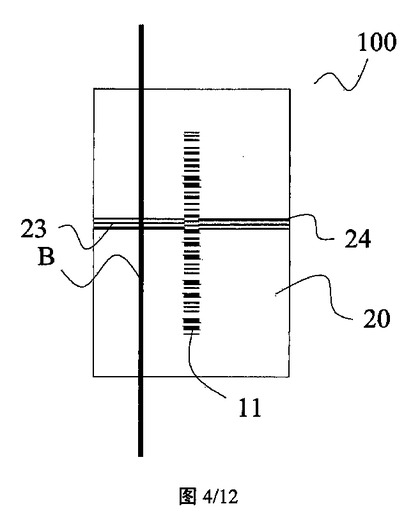
図4は、本発明の実施例4にかかるプリンタキャリアの区域の構成図である。
【0061】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0062】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の左側に、該メインバーコード11に対する相対位置情報が含まれている左側バーコード23を印刷し、
該メインバーコード11の右側に、該メインバーコード11に対する相対位置情報が含まれている右側バーコード24を印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、メインバーコード11の長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0063】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0064】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左側バーコード23に重畳される場合に、該左側バーコード23に含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域100の右側バーコード24に重畳される場合に、該右側バーコード24に含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビーム115がメインバーコード11に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0065】
本実施例は水平方向だけに正確な位置決めを必要とする状況に適用することができる。
【0066】
実施例5.
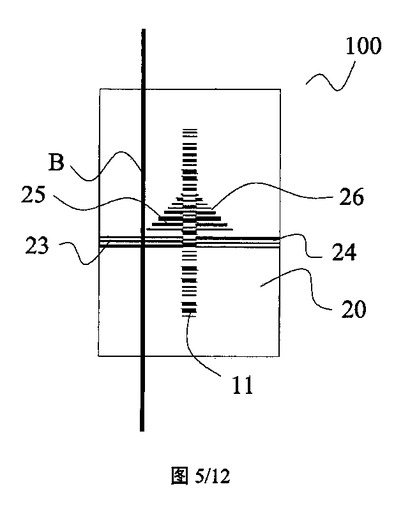
図5は、本発明の実施例5にかかるプリンタキャリアの区域の構成図である。
【0067】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0068】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の左側に、該メインバーコード11に対する相対位置情報が含まれている左側バーコード23を印刷し、
該メインバーコード11の右側に、該メインバーコード11に対する相対位置情報が含まれている右側バーコード24を印刷し、
該メインバーコード11の左側に、減速情報が含まれている左減速バーコード25を該メインバーコード11に隣接して印刷し、
該メインバーコード11の右側に、減速情報が含まれている右減速バーコード26を該メインバーコード11に隣接して印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、メインバーコード11の長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0069】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0070】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の二つの左側バーコード23に重畳される場合に、該左側バーコード23に含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコード25をスキャンした場合に、該左減速バーコード25に含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域100の二つの右側バーコード24に重畳される場合に、該右側バーコード24に含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコード26をスキャンした場合に、該右減速バーコード26に含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビーム115がメインバーコード11に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0071】
本実施例は水平方向において、迅速に、正確に位置を決める状況に適用することができる。
【0072】
実施例6.
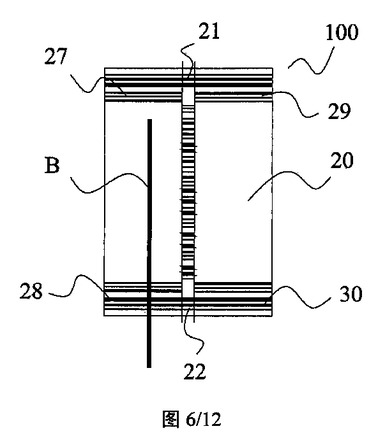
図6は、本発明の実施例6にかかるプリンタキャリアの区域の構成図である。
【0073】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0074】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の左上側と左下側に、該メインバーコード11に対する相対位置情報が含まれている左上バーコード27と左下バーコード28をそれぞれ印刷し、
該メインバーコード11の右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコード29と右下バーコード30をそれぞれ印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、左上バーコード27と左下バーコード28または右上バーコード29と右下バーコード30との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0075】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0076】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左上バーコード27または左下バーコード28だけに重畳される場合に、該左上バーコード27または左下バーコード28に含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域100の右上バーコード29または右下バーコード30だけに重畳される場合に、該右上バーコード29または右下バーコード30に含まれている相対位置情報に基づいて、左下または左上に向かって移動する。
【0077】
S4:中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中上バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0078】
本実施例は水平及び高さの両方向において、正確に位置を決める状況に適合することができる。
【0079】
実施例7.
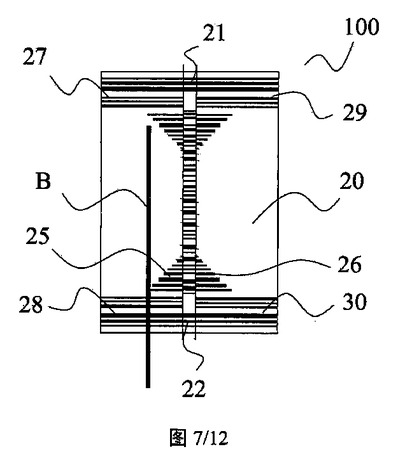
図7は、本発明の実施例7にかかるプリンタキャリアの区域の構成図である。
【0080】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0081】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の左上側と左下側に、該メインバーコード11に対する相対位置情報が含まれている左上バーコード27と左下バーコード28をそれぞれ印刷し、
該メインバーコード11の右上側と右下側に、該メインバーコード11に対する相対位置情報が含まれている右上バーコード29と右下バーコード30をそれぞれ印刷し、
該メインバーコード11の左側において、左上バーコード27と左下バーコード28との間に、減速情報が含まれている左減速バーコード25を該メインバーコード11に隣接して印刷し、
該メインバーコード11の右側において、右上バーコード29と右下バーコード30との間に、減速情報が含まれている右減速バーコード26を該メインバーコード11に隣接して印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、左上バーコード27と左下バーコード28または右上バーコード29と右下バーコード30との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0082】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0083】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左上バーコード27または左下バーコード28だけに重畳される場合に、該左上バーコード27または左下バーコード28に含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコード25をスキャンした場合に、左減速バーコード25に含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域100の右上バーコード29または右下バーコード30だけに重畳される場合に、該右上バーコード29または右下バーコード30に含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコード26をスキャンした場合に、右減速バーコード26に含まれている減速情報に基づいて減速しながら移動する。
【0084】
S4:中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中上バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0085】
本実施例は水平及び高さの両方向において、迅速に、正確に位置を決める状況に適合することができる。
【0086】
以上の実施例1〜7には、プリンタキャリア200が保管棚102の横梁103に水平に設置された状況について説明した。但し、上記プリンタキャリア200は保管棚102の立柱104に垂直に設置されることもできる。立柱104に設置する場合に、図12に示すプリンタキャリアを90°回転して設置し、それに応じて、ロボットハンド114と完全に同期するスキャンビーム115もスキャンする場合に90°回転する。
【0087】
以上は本発明の好ましい実施の形態であり、本発明の公開内容によって、類似、代替方案が想到できるのは、当業者にとって自明であり、それらは本発明の保護範囲に属するべきである。
【産業上の利用可能性】
【0088】
本発明は単冊の図書、CD、または小さなサイズの類似品のアクセスシステムに適用されるものであり、品物のアクセス位置に対して、水平方向及び/または高さ方向において迅速に、正確に位置を決めること及び位置アドレスを確認することができるので、アクセスシステムの全体的な操作効率を向上させることができ、誤アクセス率を減少することができる。
【技術分野】
【0001】
本発明は、単冊の図書、CDなど小さなサイズの品物または類似の品物に使用される正確な位置決め及び位置アドレス確認方法に関する。
【背景技術】
【0002】
現在、市場において、図書の自動アクセスシステムは、主に北アメリカ、ヨーロッパ及び日本などの先進国で応用されている。しかし、使用されている図書の自動アクセスシステムは、単冊の図書の自動アクセスシステムではなく、複数冊の図書を人手で箱に纏めて収納し、図書が収納された箱を、スタッカーで自動的に保管棚に保存する。読者が書籍を借りる場合には、スタッカーで箱単位で図書を保管棚から持ち出し、人手で読者所望の図書をその箱から持ち出して読者に渡す必要がある。このような図書の自動アクセスシステムは完全な自動化が実現できず、即ち、無人の操作が実現できない。
【0003】
従来技術として、単冊の図書またはCDなど小さなサイズの品物に適用されるアクセスシステムが公開されている。当該システムは、図8に示すように、主に、横梁103と立柱104と傾斜ドローバーなどから構成され、且つ中には品物保存部が設置されている保管棚102と、二列の保管棚102の間に設置されているスタッカー101とを具備して構成されている。図11はスタッカー101を模式的に示す構成図であり、スタッカー101は、地レール111と天レール117の間をスライドするように設置され、主に立柱112と、立柱112を上下スライドするリフト113と、リフト113に設置されているロボットハンド114から構成され、スタッカー101が上位機からの指令を受信して、保管棚102に保存されている品物に対してアクセス操作を行う場合に、まず、地レール111と天レール117に沿って対応する保管棚102の品物保存部の前方までスライドし、ロボットハンド114がリフト113に対して伸びるまたは縮むことにより、品物に対してのアクセス動作を完了する。しかし、保管棚102の取付誤差と、スタッカー101の移動などの誤差とにより、スタッカー101のロボットハンド114は異なるアクセス状況に対して、アクセスしようとする保管棚の品物保存部の真正面まで正確に移動することができないので、迅速に、効果的にアクセスできず、または誤アクセスする状況がある。
【発明の概要】
【課題を解決するための手段】
【0004】
本発明の目的は、従来技術の上記の課題を解決するために、保管棚に保存した品物に対して、迅速に、効果的に、正確に位置を決めること及び位置アドレスを確認することができる方法を提供することにある。
【0005】
本発明は上記目的を達成する為に、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0006】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されている。
【0007】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0008】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームがちょうど該保管棚品物保存部に対応する区域のメインバーコードに重畳される場合に、該メインバーコードをスキャンして、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0009】
S4:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0010】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0011】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように且つロボットハンドのスキャンビームの長さより小さいように設定する。
【0012】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0013】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0014】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0015】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、中上バーコードと中下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0016】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0017】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0018】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0019】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
【0020】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0021】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0022】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0023】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの左側に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
【0024】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0025】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコードをスキャンした場合に、該左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコードをスキャンした場合に、該右減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0026】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0027】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めたメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0028】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0029】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動する。
【0030】
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0031】
また、以下のステップを含めた正確な位置決め及び位置アドレス確認方法を提供する。
【0032】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中に、品物保存位置情報が含まれているメインバーコードを印刷し、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの左側において、左上バーコードと左下バーコードとの間に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側において、右上バーコードと右下バーコードとの間に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
【0033】
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置する。
【0034】
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコードをスキャンした場合に、左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコードをスキャンした場合に、右減速バーコードに含まれている減速情報に基づいて減速しながら移動する。
【0035】
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0036】
前記バーコードは1次元コードまたは2次元コードからなることが好ましい。
【0037】
前記プリンタキャリアは保管棚の横梁に水平に設置され、または保管棚の立柱に垂直に設置され、または、保管棚の別の相応箇所に水平または垂直に設置されることが好ましい。
【図面の簡単な説明】
【0038】
【図1A】本発明の実施例1にかかるプリンタキャリアの区域の構成図である。
【図1B】本発明の実施例1にかかるプリンタキャリアの区域の構成図である。
【図2】本発明の実施例2にかかるプリンタキャリアの区域の構成図である。
【図3】本発明の実施例3にかかるプリンタキャリアの区域の構成図である。
【図4】本発明の実施例4にかかるプリンタキャリアの区域の構成図である。
【図5】本発明の実施例5にかかるプリンタキャリアの区域の構成図である。
【図6】本発明の実施例6にかかるプリンタキャリアの区域の構成図である。
【図7】本発明の実施例7にかかるプリンタキャリアの区域の構成図である。
【図8】本発明が適用される単冊の図書またはCDなど小さなサイズの品物のアクセスシステムの上面図である。
【図9】図8の保管棚の正面図である。
【図10】図9の保管棚のある層を模式的に示す拡大図である。
【図11】スタッカーを模式的に示す構成図である。
【図12】本発明にかかるプリンタキャリアを模式的に示す図である。
【発明を実施するための形態】
【0039】
本発明にかかるバーコードは1次元コードまたは2次元コードを使用することができる。以下の実施例において、1次元コードを使用する状況だけについて紹介する。
【0040】
以下、図8、9、10に示すように、本発明にかかるプリンタキャリア200が保管棚102の横梁103に水平に設置された状況、即ち、図12のプリンタキャリアが図10の保管棚102の横梁103に設置された状況について説明する。
【0041】
実施例1.
図1は、本実施例にかかるプリンタキャリア200の区域100の構成図である。
【0042】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0043】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、プリンタキャリア200の各区域100の真ん中には、品物保存位置情報が含まれているメインバーコード11を印刷する。
【0044】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0045】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115がちょうど該保管棚品物保存部に対応する区域100のメインバーコードに重畳される場合に、該メインバーコード11をスキャンして、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする(図1Aを参照)。
【0046】
S4:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動して、スタッカー101に設置されたロボットハンドのスキャンビーム115が保管棚品物保存部に対応する区域100のメインバーコード11に重畳されない場合に、予定のプログラムによって、該メインバーコード11の方向または該区域100に隣り合う別の区域100bのメインバーコード11bの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする(図1Bを参照)。
【0047】
本実施例のプリンタキャリア200は、位置アドレス確認だけを必要とする状況に適用することができる。
【0048】
実施例2.
図2は、本発明の実施例2にかかるプリンタキャリアの区域の構成図である。
【0049】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0050】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、長さをロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0051】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0052】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が該保管棚品物保存部に対応する区域100のメインバーコード11に重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、メインバーコード11の方向または該区域100に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0053】
本実施例は保管棚品物保存部の幅が狭くて、迅速に、水平に、正確に位置を決める状況に適用することができる。
【0054】
実施例3.
図3は、本発明の実施例3にかかるプリンタキャリアの区域の構成図である。
【0055】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0056】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、中上バーコード21と中下バーコード22との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0057】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0058】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115は、
該保管棚品物保存部に対応する区域100の中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域100の中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中下バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0059】
本実施例は保管棚品物保存部の幅が狭くて、水平及び高さ方向において、迅速に、正確に位置を決める状況に適用することができる。
【0060】
実施例4.
図4は、本発明の実施例4にかかるプリンタキャリアの区域の構成図である。
【0061】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0062】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の左側に、該メインバーコード11に対する相対位置情報が含まれている左側バーコード23を印刷し、
該メインバーコード11の右側に、該メインバーコード11に対する相対位置情報が含まれている右側バーコード24を印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、メインバーコード11の長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0063】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0064】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左側バーコード23に重畳される場合に、該左側バーコード23に含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域100の右側バーコード24に重畳される場合に、該右側バーコード24に含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビーム115がメインバーコード11に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0065】
本実施例は水平方向だけに正確な位置決めを必要とする状況に適用することができる。
【0066】
実施例5.
図5は、本発明の実施例5にかかるプリンタキャリアの区域の構成図である。
【0067】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0068】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の左側に、該メインバーコード11に対する相対位置情報が含まれている左側バーコード23を印刷し、
該メインバーコード11の右側に、該メインバーコード11に対する相対位置情報が含まれている右側バーコード24を印刷し、
該メインバーコード11の左側に、減速情報が含まれている左減速バーコード25を該メインバーコード11に隣接して印刷し、
該メインバーコード11の右側に、減速情報が含まれている右減速バーコード26を該メインバーコード11に隣接して印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、メインバーコード11の長さを、ロボットハンドのスキャンビームの長さより小さいように設定する。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
【0069】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0070】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の二つの左側バーコード23に重畳される場合に、該左側バーコード23に含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコード25をスキャンした場合に、該左減速バーコード25に含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域100の二つの右側バーコード24に重畳される場合に、該右側バーコード24に含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコード26をスキャンした場合に、該右減速バーコード26に含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビーム115がメインバーコード11に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0071】
本実施例は水平方向において、迅速に、正確に位置を決める状況に適用することができる。
【0072】
実施例6.
図6は、本発明の実施例6にかかるプリンタキャリアの区域の構成図である。
【0073】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0074】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の左上側と左下側に、該メインバーコード11に対する相対位置情報が含まれている左上バーコード27と左下バーコード28をそれぞれ印刷し、
該メインバーコード11の右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコード29と右下バーコード30をそれぞれ印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、左上バーコード27と左下バーコード28または右上バーコード29と右下バーコード30との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0075】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0076】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左上バーコード27または左下バーコード28だけに重畳される場合に、該左上バーコード27または左下バーコード28に含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域100の右上バーコード29または右下バーコード30だけに重畳される場合に、該右上バーコード29または右下バーコード30に含まれている相対位置情報に基づいて、左下または左上に向かって移動する。
【0077】
S4:中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中上バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0078】
本実施例は水平及び高さの両方向において、正確に位置を決める状況に適合することができる。
【0079】
実施例7.
図7は、本発明の実施例7にかかるプリンタキャリアの区域の構成図である。
【0080】
本実施例にかかる正確な位置決め及び位置アドレス確認方法は、以下のステップを含める。
【0081】
S1:プリンタキャリア200を等間隔に複数の区域100に区画し、各区域100の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリア200の各区域100の真ん中に、品物保存位置情報が含まれているメインバーコード11を印刷し、
該メインバーコード11の真上に、該メインバーコード11に対する相対位置情報が含まれている中上バーコード21を印刷し、
該メインバーコード11の真下に、該メインバーコード11に対する相対位置情報が含まれている中下バーコード22を印刷し、
該メインバーコード11の左上側と左下側に、該メインバーコード11に対する相対位置情報が含まれている左上バーコード27と左下バーコード28をそれぞれ印刷し、
該メインバーコード11の右上側と右下側に、該メインバーコード11に対する相対位置情報が含まれている右上バーコード29と右下バーコード30をそれぞれ印刷し、
該メインバーコード11の左側において、左上バーコード27と左下バーコード28との間に、減速情報が含まれている左減速バーコード25を該メインバーコード11に隣接して印刷し、
該メインバーコード11の右側において、右上バーコード29と右下バーコード30との間に、減速情報が含まれている右減速バーコード26を該メインバーコード11に隣接して印刷し、
該メインバーコード11の幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビーム115の幅より大きいようにまたは同じように設定し、左上バーコード27と左下バーコード28または右上バーコード29と右下バーコード30との間の距離を、ロボットハンドのスキャンビーム115の長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められる。
そのうち、幅方向の位置決めグレード範囲が±2mmの場合、メインバーコード11の幅を4mmに設定し、位置決めグレード範囲が±3mmの場合、メインバーコード11の幅を6mmに設定する。
そのうち、スキャンビーム115は固定長さのビームで、長さ方向の正確な位置決めグレード範囲が±1mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから2mmを引いた値であり、長さ方向の正確な位置決めグレード範囲が±2mmの場合、中上バーコード21と中下バーコード22との間の距離はスキャンビーム115の長さから4mmを引いた値である。
【0082】
S2:前記プリンタキャリア200を、各区域100と各保管棚品物保存部とを対応付ける方式で保管棚102に設置する。
【0083】
S3:スタッカー101がアクセスしようとする保管棚品物保存部の前まで移動し、スタッカー101に設置されたロボットハンドのスキャンビーム115が
該保管棚品物保存部に対応する区域100の左上バーコード27または左下バーコード28だけに重畳される場合に、該左上バーコード27または左下バーコード28に含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコード25をスキャンした場合に、左減速バーコード25に含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域100の右上バーコード29または右下バーコード30だけに重畳される場合に、該右上バーコード29または右下バーコード30に含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコード26をスキャンした場合に、右減速バーコード26に含まれている減速情報に基づいて減速しながら移動する。
【0084】
S4:中上バーコード21と中下バーコード22において、中上バーコード21だけに重畳される場合に、該中上バーコード21に含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコード21と中下バーコード22において、中下バーコード22だけに重畳される場合に、該中下バーコード22に含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビーム115が、同時に中上バーコード21、メインバーコード11及び中上バーコード22に重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコード11に含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をする。
【0085】
本実施例は水平及び高さの両方向において、迅速に、正確に位置を決める状況に適合することができる。
【0086】
以上の実施例1〜7には、プリンタキャリア200が保管棚102の横梁103に水平に設置された状況について説明した。但し、上記プリンタキャリア200は保管棚102の立柱104に垂直に設置されることもできる。立柱104に設置する場合に、図12に示すプリンタキャリアを90°回転して設置し、それに応じて、ロボットハンド114と完全に同期するスキャンビーム115もスキャンする場合に90°回転する。
【0087】
以上は本発明の好ましい実施の形態であり、本発明の公開内容によって、類似、代替方案が想到できるのは、当業者にとって自明であり、それらは本発明の保護範囲に属するべきである。
【産業上の利用可能性】
【0088】
本発明は単冊の図書、CD、または小さなサイズの類似品のアクセスシステムに適用されるものであり、品物のアクセス位置に対して、水平方向及び/または高さ方向において迅速に、正確に位置を決めること及び位置アドレスを確認することができるので、アクセスシステムの全体的な操作効率を向上させることができ、誤アクセス率を減少することができる。
【特許請求の範囲】
【請求項1】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報が含まれているメインバーコードを印刷するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームがちょうど該保管棚品物保存部に対応する区域のメインバーコードに重畳される場合に、該メインバーコードをスキャンして、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップと、
S4:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項2】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じ且つロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項3】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、中上バーコードと中下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項4】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項5】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの左側に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコードをスキャンした場合に、該左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコードをスキャンした場合に、該右減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項6】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動するステップと、
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項7】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中に、品物保存位置情報が含まれているメインバーコードを印刷し、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの左側において、左上バーコードと左下バーコードとの間に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側において、右上バーコードと右下バーコードとの間に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるスッテプと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコードをスキャンした場合に、左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコードをスキャンした場合に、右減速バーコードに含まれている減速情報に基づいて減速しながら移動するステップと、
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項8】
前記バーコードは1次元コードまたは2次元コードからなることを特徴とする請求項1乃至7の何れかに記載の正確な位置決め及び位置アドレス確認方法。
【請求項9】
前記プリンタキャリアは保管棚の横梁に水平に設置され、または保管棚の立柱に垂直に設置され、または、保管棚の別の相応箇所に水平または垂直に設置されることを特徴とする請求項1乃至7の何れかに記載の正確な位置決め及び位置アドレス確認方法。
【請求項1】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報が含まれているメインバーコードを印刷するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームがちょうど該保管棚品物保存部に対応する区域のメインバーコードに重畳される場合に、該メインバーコードをスキャンして、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップと、
S4:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、あるメインバーコードをスキャンした場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項2】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じ且つロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームが該保管棚品物保存部に対応する区域のメインバーコードに重畳されない場合に、あるメインバーコードに重畳されるまで、予定のプログラムによって、該メインバーコードの方向または該区域に隣り合う別の区域のメインバーコードの方向に向かって移動し、正確な位置決めを行い、あるメインバーコードに重畳される場合に、前記メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項3】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、中上バーコードと中下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
該保管棚品物保存部に対応する区域の中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項4】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項5】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの左側に、該メインバーコードに対する相対位置情報が含まれている左側バーコードを印刷し、
該メインバーコードの右側に、該メインバーコードに対する相対位置情報が含まれている右側バーコードを印刷し、
該メインバーコードの左側に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、メインバーコードの長さを、ロボットハンドのスキャンビームの長さより小さいように設定するステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左側バーコードに重畳される場合に、該左側バーコードに含まれている相対位置情報に基づいて、右側に向かって移動し、右側に向かって移動する過程で左減速バーコードをスキャンした場合に、該左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右側バーコードに重畳される場合に、該右側バーコードに含まれている相対位置情報に基づいて、左側に向かって移動し、左側に向かって移動する過程で右減速バーコードをスキャンした場合に、該右減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
ロボットハンドのスキャンビームがメインバーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項6】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中には、品物保存位置情報を含めているメインバーコードが印刷されており、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるステップと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動するステップと、
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項7】
S1:プリンタキャリアを等間隔に複数の区域に区画し、各区域の幅を保管棚品物保存部の幅に一致させるように設定し、前記プリンタキャリアの各区域の真ん中に、品物保存位置情報が含まれているメインバーコードを印刷し、
該メインバーコードの真上に、該メインバーコードに対する相対位置情報が含まれている中上バーコードを印刷し、
該メインバーコードの真下に、該メインバーコードに対する相対位置情報が含まれている中下バーコードを印刷し、
該メインバーコードの左上側と左下側に、該メインバーコードに対する相対位置情報が含まれている左上バーコードと左下バーコードをそれぞれ印刷し、
該メインバーコードの右上側と右下側に、該メインバーコードに対する相対位置情報が含まれている右上バーコードと右下バーコードをそれぞれ印刷し、
該メインバーコードの左側において、左上バーコードと左下バーコードとの間に、減速情報が含まれている左減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの右側において、右上バーコードと右下バーコードとの間に、減速情報が含まれている右減速バーコードを該メインバーコードに隣接して印刷し、
該メインバーコードの幅を、幅方向の位置決めグレード範囲に一致させると共に、ロボットハンドのスキャンビームの幅より大きいようにまたは同じように設定し、左上バーコードと左下バーコードまたは右上バーコードと右下バーコードとの間の距離を、ロボットハンドのスキャンビームの長さより小さいように設定し、小さい部分の量は、長さ方向の位置決めグレード範囲によって決められるスッテプと、
S2:前記プリンタキャリアを、各区域と各保管棚品物保存部とを対応付ける方式で保管棚に設置するステップと、
S3:スタッカーがアクセスしようとする保管棚品物保存部の前まで移動して、スタッカーに設置されたロボットハンドのスキャンビームは、
該保管棚品物保存部に対応する区域の左上バーコードまたは左下バーコードだけに重畳される場合に、該左上バーコードまたは左下バーコードに含まれている相対位置情報に基づいて、右下または右上に向かって移動し、右下または右上に向かって移動する過程で左減速バーコードをスキャンした場合に、左減速バーコードに含まれている減速情報に基づいて減速しながら移動し、
該保管棚品物保存部に対応する区域の右上バーコードまたは右下バーコードだけに重畳される場合に、該右上バーコードまたは右下バーコードに含まれている相対位置情報に基づいて、左下または左上に向かって移動し、左下または左上に向かって移動する過程で右減速バーコードをスキャンした場合に、右減速バーコードに含まれている減速情報に基づいて減速しながら移動するステップと、
S4:中上バーコードと中下バーコードにおいて、中上バーコードだけに重畳される場合に、該中上バーコードに含まれている相対位置情報に基づいて、真下に向かって移動し、
中上バーコードと中下バーコードにおいて、中下バーコードだけに重畳される場合に、該中下バーコードに含まれている相対位置情報に基づいて、真上に向かって移動し、
ロボットハンドのスキャンビームが、同時に中上バーコード、メインバーコード及び中下バーコードに重畳されるまで、以上の動作を行うことにより、正確に位置を決める。この場合、該メインバーコードに含まれている品物保存位置情報を読み取ることにより、品物の保存位置に対して位置アドレス確認をするステップを含めることを特徴とする正確な位置決め及び位置アドレス確認方法。
【請求項8】
前記バーコードは1次元コードまたは2次元コードからなることを特徴とする請求項1乃至7の何れかに記載の正確な位置決め及び位置アドレス確認方法。
【請求項9】
前記プリンタキャリアは保管棚の横梁に水平に設置され、または保管棚の立柱に垂直に設置され、または、保管棚の別の相応箇所に水平または垂直に設置されることを特徴とする請求項1乃至7の何れかに記載の正確な位置決め及び位置アドレス確認方法。
【図1A】

【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2013−506173(P2013−506173A)
【公表日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−530103(P2012−530103)
【出願日】平成22年12月16日(2010.12.16)
【国際出願番号】PCT/CN2010/002056
【国際公開番号】WO2011/075946
【国際公開日】平成23年6月30日(2011.6.30)
【出願人】(512079495)バオシェン・テクノロジー・リミテッド・ズァンジアガン (1)
【Fターム(参考)】
【公表日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成22年12月16日(2010.12.16)
【国際出願番号】PCT/CN2010/002056
【国際公開番号】WO2011/075946
【国際公開日】平成23年6月30日(2011.6.30)
【出願人】(512079495)バオシェン・テクノロジー・リミテッド・ズァンジアガン (1)
【Fターム(参考)】
[ Back to top ]