
歩行ナビゲーションシステム
【課題】
触覚を用いたより簡便且つ直感的な歩行ナビゲーションシステムを提供する。
【解決手段】
歩行ナビゲーションシステム100は、歩行者の所定の進行方向を入力する入力手段を有するコントローラ10と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対して平行する方向、および/または歩行者の進行方向に対して直交する方向に牽引する牽引手段と、前記入力情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置20と、から構成される。
触覚を用いたより簡便且つ直感的な歩行ナビゲーションシステムを提供する。
【解決手段】
歩行ナビゲーションシステム100は、歩行者の所定の進行方向を入力する入力手段を有するコントローラ10と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対して平行する方向、および/または歩行者の進行方向に対して直交する方向に牽引する牽引手段と、前記入力情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置20と、から構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、利用者の歩行を補助する歩行ナビゲーションシステムに関し、特に触覚を通じて利用者を誘導する歩行ナビゲーションシステムに関する。
【背景技術】
【0002】
近年、歩行者の目的地までの経路をサポートするシステム(以下、歩行ナビゲーションシステムという。)が、携帯電話、PDA(Personal Digital Assistant)等の携帯端末の普及によりそのアプリケーションとして提供され、携帯端末の画面上に、携帯端末の周辺地図、及びその携帯端末を持つ歩行者の現在位置を表示し、歩行者の移動に伴ってその画面上の表示が随時更新されると共に、目的地までの経路を随時音声にて歩行者に通知されるようになっている。
すなわち、視覚、聴覚への提示が主流である。
【0003】
しかしながら、視覚、聴覚は、歩行時に外部から情報を得る為に使われる重要な感覚でもある。
上述の携帯電話、PDAを目視で確認しつつ歩行することは、非常に煩雑である。
また、視覚障害者にとっては、携帯電話、PDAの画面を目視で確認することができず、音声によるナビゲーションであっても、外部情報取得として視覚障害者にとって非常に重要な聴覚の妨げになる課題がある。また直接誘導されていない為、直感的ではない課題がある。
従って、より安全な歩行時のナビゲーションの為には、視覚、聴覚以外の感覚器を利用することが望ましく、近年触覚への提示によるものが提案されている。
【0004】
ところで、触覚は歩行時に使われることがない感覚であって、情報を提示する余裕のある感覚である。この触覚を通じて情報提示することによるナビゲーション手法として、前庭を電気刺激することで歩行方向を促す手法が提案されている(特許文献1)。
また、人間の知覚特性を利用し周期運動によって一方向に牽引される感覚を提示する手法が提案されている(非特許文献1、非特許文献2)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−144057
【非特許文献】
【0006】
【非特許文献1】雨宮智浩・安藤英由樹・前田太郎:『知覚の非線形性を利用した非接地型力覚惹起手法の提案と評価』日本バーチャルリアリティ学会論文誌,Vol.11 No.1,P47-58(2006)
【0007】
【非特許文献2】吉江将之・矢野博明・岩田洋夫:『ジャイロモーメントを用いた力覚提示装置』日本バーチャルリアリティ学会論文誌,Vol.7 No.3(2002)
【発明の概要】
【発明が解決しようとする課題】
【0008】
人が人を誘導する場合に、腕をとって直接誘導するのが最も直感的であるが、上記いずれの所謂ハンドヘルドタイプの手法では、実際に「手で牽引する」のと比べ、外力を発生できないことによって生じる不自然さが残る課題がある。
【0009】
上記課題を解決する為に、本発明は、触覚を用いたより簡便且つ直感的な歩行ナビゲーションシステムであって、特に耳を牽引することに着目し、その牽引によって頭部のバランスを傾かせることで人を誘導する、新たな歩行ナビゲーションシステムを提案するものである。
耳を引っ張られる状況では、手を引く場合と比べ非常に弱い力で牽引が可能である。また、その力は手綱としての役割さえ果たせばよく、外力として実際に牽引する必要はない。
つまり、耳を引く動作は、ポータブルデバイスによって歩行を誘導する為の一つの可能性を示唆しているといえる。
【課題を解決するための手段】
【0010】
請求項1に記載の歩行ナビゲーションシステムは、歩行者の所定の進行方向を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報に基づき前記牽引手段を制御する制御手段と、を有する耳牽引装置と、からなることを特徴としている。
請求項2に記載の歩行ナビゲーションシステムは、歩行者の目的地を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、現在位置を検出する現在位置検出手段と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報および前記目的地情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、からなることを特徴としている。
請求項3に記載の歩行ナビゲーションシステムは、上記牽引手段が、受信した前記入力情報に基づき、前記一対の挟持手段のうち一方を歩行者の進行方向に対する平行方向に牽引する第1の牽引手段及び他方を歩行者の進行方向に対する平行方向に牽引する第2の牽引手段と、受信した前記入力情報に基づき、前記一対の挟持手段を歩行者の進行方向に対する直交方向に牽引する第3の牽引手段と、を有することを特徴としている。
【発明の効果】
【0011】
本発明の歩行ナビゲーションシステムによれば、耳の牽引によって頭部のバランスを傾かせることで被操作者の歩行を誘導することができるので、従来の歩行ナビゲーションシステムと比べ、被操作者に対し外力として実際に牽引することなく、弱い力で、且つ直感的に歩行の誘導することができるという利点がある。
また、本発明の歩行ナビゲーションシステムによれば、GPS(Global Positioning System:全地球測位システム)機能を備えることによって、上述の問題を解決すると共に、GPSによる現在位置の確認により、目的地までの自動歩行ナビゲーションも果たすことができるという利点がある。
【図面の簡単な説明】
【0012】
【図1】本発明第1の実施の形態に係る歩行ナビゲーションシステムの構成図。
【図2】本発明第1の実施の形態に係る耳牽引装置の具体的態様を示す説明図。
【図3】本発明第1の実施の形態に係る耳牽引装置の外観を示す斜視図。
【図4】本発明第1の実施の形態に係る耳牽引手順を示すフローチャート図。
【図5】本発明第1の実施の形態に係る歩行ナビゲーションシステムの補足説明図。
【図6】本発明第2の実施の形態に係る歩行ナビゲーションシステムの構成図。
【図7】本発明第2の実施の形態に係る耳牽引手順を示すフローチャート図。
【発明を実施するための形態】
【0013】
以下、本発明に係る歩行ナビゲーションシステムの一実施の形態を、図面を参照し説明する。
【0014】
(1)第1の実施の形態
【0015】
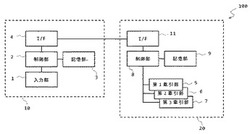
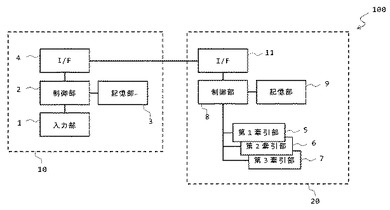
図1は、歩行ナビゲーションシステム100の全体構成を示し、入力手段としてのコントローラ10と、耳牽引装置20とからなり、操作者がコントローラ10を操作することによって、耳牽引装置20が制御され、その耳牽引装置20を装着する被操作者の進行を所定方向に促すようになっている。
【0016】
コントローラ10は、主として、入力部1、制御部2、記憶部3、インターフェース4とからなる。
入力部1は、操作者が被操作者の進行を所定方向に促すための操作情報を入力する入力手段である。なお、以下説明の便宜のため、被操作者の視線方向を前方向、前方向に対して右側を右方向、前方向に対して左側を左方向として説明する。
入力される操作情報は、被操作者の左右、被操作者の方向転換情報としての徐々に牽引、又は一気に牽引等の牽引動作、及び牽引時間等である。
なお、これら操作情報を入力する入力部1としては既存のものを用いることができ、特に限定するものでなく、例えば自動車のハンドルのような回転型のもの、十字キー、又はスティック型のような一入力部で、上述の複数の操作情報を入力することもできる。
記憶部3は、所定の制御プログラムが記憶されているROMと、各種データを一時記憶するRAMとからなる。
制御部2は、入力部1からの操作情報に基づき、また記憶部3から所定の制御プログラムを読み出して、後述する図4の耳牽引手順に示すコントローラ10側の手順を実行して、耳牽引装置20に送信できる形式の送信信号を生成する。
インターフェース4は、有線、無線のいずれであってもよく、コントローラ10と耳牽引装置20との間の双方向通信を可能とする。
【0017】
耳牽引装置20は、主として、第1牽引部5、第2牽引部6、及び第3牽引部7、制御部8、記憶部9、インターフェース11とからなる。
記憶部9は、所定の制御プログラムが記憶されているROMと、各種データを一時記憶するRAMとからなる。
制御部8は、インターフェース11を介してコントローラ10からの受信信号から、被操作者の左右、被操作者の方向転換情報としての徐々に牽引、又は一気に牽引等の牽引動作、及び牽引時間等の操作情報を抽出し、また記憶部9から所定の制御プログラムを読み出して、後述する図4の耳牽引手順に示す耳牽引装置20側の手順を実行して、第1牽引部5、第2牽引部6、第3牽引部のすべて、またはいずれかを制御駆動するようになっている。
【0018】
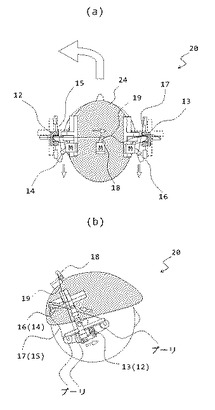
図2は、耳牽引装置20の概略構成図である。図2(a)は、耳牽引装置20を装着した被操作者の上面図であり、図2(b)はその右側面図である。また図3は、外観を説明する斜視図である。
【0019】
耳牽引装置20は、主として、被操作者の左右の耳をそれぞれ挟持する、第1挟持部材12及び第2挟持部材13を前後左右方向に牽引する第1牽引部5、第2牽引部6、及び第3牽引部7と、これら第1牽引部5、第2牽引部6、及び第3牽引部7を、被操作者が装着する装着部24(本例ではいわゆるヘルメットを用いている)に固定させる複数の支持部材と、制御部8及び記憶部9と、インターフェースとしての通信機11とからなる。
【0020】
第1挟持部材12、第2挟持部材13は、夫々被操作者の左右の両耳を挟持する挟持手段であって、第1挟持部材12は被操作者の左耳を挟持し、第2挟持部材13は被操作者の右耳を挟持し、後述する第1牽引部5、第2牽引部6、及び第3牽引部7の駆動に伴って、前後、左右に牽引されて揺動するようになっている。
【0021】
第1牽引部5(左側)及び第2牽引部6(右側)は、被操作者を前後方向に誘導、すなわち被操作者の前進の促進及び前進の減速を促し、又は緩やかに左右方向への転換を促すものである。
すなわち、第1牽引部5は、所定の支持部材によって装着部24(ヘルメット)に固定され、主として、被操作者の左側に設けられモータ駆動によって被操作者の前後方向に回動する第1作動部材14と、該第1作動部材14と連結し、第1作動部材14の前後方向への回動に伴って牽引される第1ワイヤー15とからなり、該第1ワイヤー15は複数のプーリを介して、被操作者の左耳を挟持する第1挟持部材12を前後方向に揺動させるように連結してなる。
【0022】
第2牽引部6は、第1牽引部5と、被操作者に対して左右対称に設けられるものであって、主として、被操作者の右側に設けられモータ駆動によって被操作者の前後方向に回動する第2作動部材16と、該第2作動部材16と連結し、第2作動部材16の前後方向への回動に伴って牽引される第2ワイヤー17とからなり、該第2ワイヤー17は複数のプーリを介して、被操作者の右耳を挟持する第2挟持部材13を前後方向に揺動させるように連結してなる。
【0023】
この第1作動部材14、第2作動部材16が回動することによって、夫々連結する第1ワイヤー15、第2ワイヤー17が緊張し、例えば第1作動部材14、第2作動部材16双方が被操作者の後方に回動した場合、第1ワイヤー15、第2ワイヤー17双方の前側部分が緊張する。
第1挟持部材12、第2挟持部材13は、夫々第1ワイヤー15、第2ワイヤー17の前側部分の緊張に伴い前方向に揺動し、すなわち被操作者の左右の耳が前方向に牽引される。
また、一方の作動部材、例えば第2作動部材16(右側)のみが後方に回動することによって、その回動に伴って、連結する第2ワイヤー17の前側部分が緊張し、連結する第2挟持部材13は、前方向に牽引されて揺動する。すなわち被操作者の右耳が前方向に牽引される。この場合、被操作者は、緩やかに左前方向に力が働き、方向転換するよう促される。
【0024】
第3牽引部7は、被操作者を左右方向に誘導、すなわち被操作者の左右方向への転進を促すものである。
すなわち、第3牽引部7は、所定の支持部材によって装着部24(ヘルメット)上方に固定され、主として、モータ駆動によって被操作者の左右方向に回動する第3作動部材18と、該第3作動部材18と連結し、第3作動部材18の左右方向への回動に伴って牽引される第3ワイヤー19とからなり、該第3ワイヤー19は複数のプーリを介して、被操作者の左右の耳を夫々挟持する第1挟持部材12、第2挟持部材13を左右方向に揺動させるように連結してなる。
この第3作動部材18が回動することによって、連結する第3ワイヤー19が緊張し、例えば第3作動部材18が被操作者の右方向に回動した場合、第3ワイヤー19の左側部分が緊張する。
このとき、左側の第1挟持部材12は、第3ワイヤー19の左側部分の緊張に伴い左方向に牽引されて揺動し、すなわち被操作者の左耳が左方向に牽引される。この場合、被操作者は、強く左方向に牽引され、左方向への方向転換を促される。
【0025】
なお、前記第1ワイヤー15、第2ワイヤー17、及び第3ワイヤー19は、大きな加重に耐えられる強度を有し、切れにくく、例えば高密度ポリエチレンからなる釣り糸が適する。また、被操作者によって顔の大きさが異なる為、弾性力を有しているものがなお好ましい。
また、装着部24としてヘルメットを用いるようにしたが、第1牽引部5、第2牽引部6、及び第3牽引部7を被操作者の頭部に固定できればよく、これに限定されない。例えば、既存のヘッドホン形状であってもよい。
図3は、耳牽引装置20の外観を具体的に示す図である。
【0026】
図2及び図3に示す具体的態様は一例であって、本発明の趣旨を逸脱しない範囲で適宜変更することができる。
【0027】
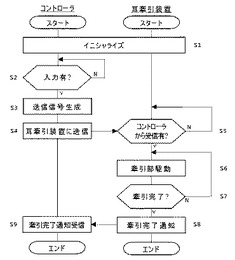
次に図4を参照して、耳牽引手順を説明する。
図4は、耳牽引手順を示すフローチャート図であって、コントローラ10側の制御及び耳牽引装置20側の制御を便宜のため一図で表したものである。
【0028】
コントローラ10及び耳牽引装置20において、起動後各種調整が行われる。具体的には、設定情報を記憶部3、9から読み出し、モード設定(自動制御、マニュアル制御など)、又はコントローラ10側の入力部1での入力操作に対する耳牽引装置20の第1牽引部5、第2牽引部6、第3牽引部7の駆動範囲等の調整が行われる。また、インターフェース4、11が無線である場合には、このイニシャライズ処理のときにコントローラ10と耳牽引装置20との間で無線回線の接続が行われる(ステップS1)。
次に、コントローラ10において、操作者による入力部1からの入力の有無を判定し(ステップS2)、操作者による入力を検知したとき、その入力された操作情報が制御部2へ送られる。
制御部2は、この入力部1からの操作情報に基づき、記憶部3から所定の制御プログラムを読み出して、耳牽引装置20に送信できる形式の送信信号を生成する(ステップS3)。
生成された送信信号は、インターフェース4、11を介して耳牽引装置20に送信される(ステップS4)。
【0029】
耳牽引装置20では、イニシャライズの後、インターフェース4、11を介してコントローラ10から送信される信号の受信の有無を判定し、(ステップS5)受信がないときは繰返し受信判定を行う。なお、この受信判定を一定間隔で定期的に行うものであってもよく、また通常スリープ状態で、コントローラから送信される信号によって起動するようにしてもよい。
そして、コントローラ10からの信号を受信したとき、その受信信号は制御部8に送られる。
制御部8は、この受信信号から、コントローラ10の入力部1にて入力された操作情報を抽出し、記憶部9から所定の制御プログラムを読み出して、この操作情報に基づき第1牽引部5、第2牽引部6、及び第3牽引部7を駆動させる(ステップS6)。
第1牽引部5、第2牽引部6、及び第3牽引部7は、この制御部8の制御のもと駆動し、上述した所定の耳牽引動作を行う。
そして、制御部8は、耳牽引動作がすべて完了したかどうか判定し(ステップS7)、完了するまで所定の耳牽引動作を継続し、全て完了したと判定したとき、インターフェース11、4を介してコントローラ10に牽引完了通知を送信する(ステップS8)。
コントローラ10は、耳牽引装置20からの、牽引完了通知を受信し(ステップS9)耳牽引手順を終了する。
【0030】
なお、上述の操作情報につき、一例を図5に示す。
図5は、コントローラ10から入力される操作情報と、この操作情報に対応する第1牽引部5、第2牽引部6、及び第3牽引部7の各作動部材の駆動とを対応付けたものであり、コントローラ10及び耳牽引装置20の制御部2、8に記憶されている。
例えば、コントローラ10の入力部1にて、操作者によって右が入力された場合、耳牽引装置20の第1作動部材14は後方に回動し、第2作動部材16は前方に回動し、第3作動部材18は左に回動し、入力されたコントローラ10での操作継続時間(本例では右操作1分間継続)に基づき回動を継続する。この回動により、第1牽引部材12(左側)は前方へ揺動し、第2牽引部材13(右側)は、後方及び右側へ揺動し、かくして被操作者は右側へ誘導され、歩行ナビゲーションが実現される。
また、第1牽引部5、第2牽引部6のみの構成でも被操作者の歩行ナビゲーションは実現できることが図5から明らかである。第3牽引部7を備えることで、さらに牽引の精度向上を図っている。
【0031】
(2)実証実験
なお実証実験として、耳を一方向に徐々に引く、及び一気に引く牽引動作を行った。
左右それぞれの耳たぶにクリップ(第1挟持部材12、第2挟持部材13)を装着し、被験者には自然に直進歩行するように指示し、歩行中に上記2種類の刺激を提示した。
実験後の被験者の感想によると、徐々に引く場合と比べ、一気に引く場合の方が引かれる感覚が強く、進行方向が変化する感覚を生じたという回答を得た。
また比較的強い均一な張力をかけた場合、定常的にその方向に牽引され続ける感覚が生じたとの回答を得た。
この実証実験の結果により、歩行時における進行方向を誘導する手法として耳を直接引く手法につき、歩行誘導の可能性が示唆された。
【0032】
(3)第2の実施の形態
上述の第1の実施の形態において、図4の耳牽引手順として一動作として説明したが、一連の操作情報を予め入力しておくようにしても良く、例えば目的地、目的地までの距離、及び歩行者の歩行速度などを予め入力部1から入力して記憶部9に記憶しておくことにより、一連の耳牽引手順を行うことができる。
さらに、GPS機能を備えることによって、現在位置を確認しながら目的地までの自動歩行ナビゲーションシステムを実現でき、さらなるナビゲーション機能の向上が期待できる。
すなわち、第2の実施の形態にかかる歩行ナビゲーションシステム200は、第1の歩行ナビゲーションシステム100の耳牽引装置20において、さらにGPS受信部25を備える。
【0033】
なお、図中、図1に示された第1の実施の形態に対応する部分については同一の符号を付し、以下、その説明は適宜省略する。
図6は、本発明第2の実施の形態に係る歩行ナビゲーションシステム200の全体構成を示し、主として、入力手段としてのコントローラ30と、耳牽引装置40と、GPS衛星26とからなり、耳牽引装置40はGPS受信部25を備えてなる。
この第2の実施の形態に係る歩行ナビゲーションシステム200においては、GPS衛星26及び耳牽引装置40のGPS受信部25により、被操作者の位置を確認すると共に、コントローラ30の入力部21から、第1の実施の形態とは異なり、地図情報に基づく目的地情報が入力され、耳牽引装置40は、その入力された目的地まで被操作者を誘導するようになっている。
【0034】
コントローラ30の記憶部23は、所定の制御プログラムに加え、さらに地図情報が記憶されているROMと、各種データを一時記憶するRAMとからなる。
入力部21は、被操作者を目的地まで誘導するための目的地情報を入力する入力手段であって、例えば、目的地の番地、地名、座標等の情報が入力される。
【0035】
耳牽引装置40のGPS受信部25は、GPS衛星26からの電波を受信し、GPS衛星26との距離から耳牽引装置40を装着する被操作者の現在位置を演算出力する。
制御部28は、コントローラ30から受信した目的地情報と、GPS衛星26から受信した位置情報とに基づき、第1牽引部5、第2牽引部6、及び第3牽引部7を制御駆動させる。また適宜、現在位置から目的地までの位置を演算し、第1牽引部5、第2牽引部6、及び第3牽引部7の制御駆動を補正する。
【0036】
次に図7を参照して、GPSに基づく耳牽引手順について説明する。
図7は、GPSに基づく耳牽引手順を示すフローチャート図であって、コントローラ30側の制御及び耳牽引装置40側の制御を便宜のため一図で表したものである。
【0037】
コントローラ30及び耳牽引装置40において、起動後各種調整が行われる。具体的には、設定情報を記憶部から読み出し、モード設定(GPSに基づく歩行ナビゲーションモード、入力操作に基づくマニュアルモードなど)、又はコントローラ30側の入力部21での入力操作に対する耳牽引装置40の第1牽引部5、第2牽引部6、第3牽引部7の駆動範囲等の調整が行われる。また、インターフェース4、11が無線である場合には、このイニシャライズ処理のときにコントローラ30と耳牽引装置40との間で無線回線の接続が行われる(ステップS11)。
次に、耳牽引装置40において、GPS受信部25がGPS衛星26からの電波の受信を試み、GPS衛星26からの電波の受信の有無を判定する(ステップS12)。
GPS衛星26からの電波を受信したとき、GPS受信部25は、受信信号を制御部28に送信し、制御部28は、GPS衛星26との距離から耳牽引装置40の位置、すなわち耳牽引装置40を装着する被操作者の位置を演算出力し、この位置情報を記憶部29に一時記憶させる(ステップS13)。
また制御部28は、インターフェース11、4を介して、コントローラ30にこの位置情報を送信する(ステップS14)。
【0038】
コントローラ30では、イニシャライズの後、インターフェース11、4を介して耳牽引装置40から送信される位置情報の受信の有無を判定し、(ステップS15)受信がないときは繰返し受信判定を行う。
そして、耳牽引装置40からの位置情報を受信したとき、その位置情報は記憶部23にて一時記憶される。
次に、操作者による入力部21からの入力の有無を判定し(ステップS16)、操作者による入力を検知したとき、その入力された操作情報が制御部22へ送られる。ここで入力される情報は、前述の通り、被操作者を目的地まで誘導するための目的地情報である。
なお、この入力される目的地情報に関して、記憶部23に記憶している位置情報及び地図情報を参酌して入力される。また、この地図情報を、図示しない表示部で確認しつつ、被操作者の歩行ルートを詳細に入力することもできる。
制御部22は、この入力された目的地情報に基づき、記憶部23から所定の制御プログラムを読み出して、耳牽引装置40に送信できる形式の送信信号を生成する(ステップS17)。
生成された送信信号は、インターフェース4、11を介して耳牽引装置40に送信される(ステップS18)。
【0039】
耳牽引装置40では、インターフェース4、11を介してコントローラ30から送信される信号の受信の有無を判定し、(ステップS19)受信がないときは繰返し受信判定を行う。なお、この受信判定を一定間隔で定期的に行うものであってもよく、また通常スリープ状態で、コントローラ30から送信される信号によって起動するようにしてもよい。
そして、コントローラ30からの信号を受信したとき、その受信信号は制御部28に送られる。
制御部28は、この受信信号から、コントローラ30の入力部21にて入力された目的地情報を抽出し、記憶部29から所定の制御プログラム、及び位置情報を読み出して、現在位置を補正し(ステップS20)、第1牽引部5、第2牽引部6、及び第3牽引部7を駆動させる(ステップS21)。
第1牽引部5、第2牽引部6、及び第3牽引部7は、この制御部28の制御のもと駆動し、上述した所定の耳牽引動作を行う。
そして、制御部28は、耳牽引動作がすべて完了、即ち目的地に到達したかどうか判定し(ステップS22)、完了していない、すなわち目的地に到達していないと判定した場合、ステップS20乃至ステップS21のGPSによる位置補正、及び所定の耳牽引動作を行い、全て完了したと判定したとき、すなわち被操作者が目的地に到達したと判定したとき、インターフェース11、4を介してコントローラ30に牽引完了通知を送信する(ステップS23)。
コントローラ30は、牽引装置40からの、牽引完了通知を受信し(ステップS24)耳牽引手順を終了する。
【0040】
かくして、GPS情報を用いた、目的地までの歩行ナビゲーションが実現される。
なお、第2の実施の形態に係る歩行ナビゲーションシステム200において、GPS受信部25を耳牽引装置40に設けたが、被操作者自身がコントローラ30を携帯するような場合には、GPS受信部25がコントローラ側に設けられてもよい。
すなわち、携帯電話、PDA等をコントローラ30として用いるような場合が想定される。被操作者は、目的地まで携帯電話の画面を確認することなく、誘導され、従来の携帯電話やPDA端末を利用した歩行ナビゲーションシステムを著しく向上することができる。
【0041】
その他、本発明の趣旨を逸脱しない範囲で適宜変更することができる。
【符号の説明】
【0042】
1,21…入力部、2,22…制御部、3,23…記憶部、4…インターフェース、5…第1牽引部、6…第2牽引部、7…第3牽引部、8,28…制御部、9,29…記憶部、10,30…コントローラ、11…インターフェース、12…第1挟持部、13…第2挟持部、14…第1作動部材、15…第1ワイヤー、16…第2作動部材、17…第2ワイヤー、18…第3作動部材、19…第3ワイヤー、20,40…耳牽引装置、24…装着部、25…GPS受信部、26…GPS衛星、100,200…歩行ナビゲーションシステム
【技術分野】
【0001】
本発明は、利用者の歩行を補助する歩行ナビゲーションシステムに関し、特に触覚を通じて利用者を誘導する歩行ナビゲーションシステムに関する。
【背景技術】
【0002】
近年、歩行者の目的地までの経路をサポートするシステム(以下、歩行ナビゲーションシステムという。)が、携帯電話、PDA(Personal Digital Assistant)等の携帯端末の普及によりそのアプリケーションとして提供され、携帯端末の画面上に、携帯端末の周辺地図、及びその携帯端末を持つ歩行者の現在位置を表示し、歩行者の移動に伴ってその画面上の表示が随時更新されると共に、目的地までの経路を随時音声にて歩行者に通知されるようになっている。
すなわち、視覚、聴覚への提示が主流である。
【0003】
しかしながら、視覚、聴覚は、歩行時に外部から情報を得る為に使われる重要な感覚でもある。
上述の携帯電話、PDAを目視で確認しつつ歩行することは、非常に煩雑である。
また、視覚障害者にとっては、携帯電話、PDAの画面を目視で確認することができず、音声によるナビゲーションであっても、外部情報取得として視覚障害者にとって非常に重要な聴覚の妨げになる課題がある。また直接誘導されていない為、直感的ではない課題がある。
従って、より安全な歩行時のナビゲーションの為には、視覚、聴覚以外の感覚器を利用することが望ましく、近年触覚への提示によるものが提案されている。
【0004】
ところで、触覚は歩行時に使われることがない感覚であって、情報を提示する余裕のある感覚である。この触覚を通じて情報提示することによるナビゲーション手法として、前庭を電気刺激することで歩行方向を促す手法が提案されている(特許文献1)。
また、人間の知覚特性を利用し周期運動によって一方向に牽引される感覚を提示する手法が提案されている(非特許文献1、非特許文献2)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−144057
【非特許文献】
【0006】
【非特許文献1】雨宮智浩・安藤英由樹・前田太郎:『知覚の非線形性を利用した非接地型力覚惹起手法の提案と評価』日本バーチャルリアリティ学会論文誌,Vol.11 No.1,P47-58(2006)
【0007】
【非特許文献2】吉江将之・矢野博明・岩田洋夫:『ジャイロモーメントを用いた力覚提示装置』日本バーチャルリアリティ学会論文誌,Vol.7 No.3(2002)
【発明の概要】
【発明が解決しようとする課題】
【0008】
人が人を誘導する場合に、腕をとって直接誘導するのが最も直感的であるが、上記いずれの所謂ハンドヘルドタイプの手法では、実際に「手で牽引する」のと比べ、外力を発生できないことによって生じる不自然さが残る課題がある。
【0009】
上記課題を解決する為に、本発明は、触覚を用いたより簡便且つ直感的な歩行ナビゲーションシステムであって、特に耳を牽引することに着目し、その牽引によって頭部のバランスを傾かせることで人を誘導する、新たな歩行ナビゲーションシステムを提案するものである。
耳を引っ張られる状況では、手を引く場合と比べ非常に弱い力で牽引が可能である。また、その力は手綱としての役割さえ果たせばよく、外力として実際に牽引する必要はない。
つまり、耳を引く動作は、ポータブルデバイスによって歩行を誘導する為の一つの可能性を示唆しているといえる。
【課題を解決するための手段】
【0010】
請求項1に記載の歩行ナビゲーションシステムは、歩行者の所定の進行方向を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報に基づき前記牽引手段を制御する制御手段と、を有する耳牽引装置と、からなることを特徴としている。
請求項2に記載の歩行ナビゲーションシステムは、歩行者の目的地を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、現在位置を検出する現在位置検出手段と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報および前記目的地情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、からなることを特徴としている。
請求項3に記載の歩行ナビゲーションシステムは、上記牽引手段が、受信した前記入力情報に基づき、前記一対の挟持手段のうち一方を歩行者の進行方向に対する平行方向に牽引する第1の牽引手段及び他方を歩行者の進行方向に対する平行方向に牽引する第2の牽引手段と、受信した前記入力情報に基づき、前記一対の挟持手段を歩行者の進行方向に対する直交方向に牽引する第3の牽引手段と、を有することを特徴としている。
【発明の効果】
【0011】
本発明の歩行ナビゲーションシステムによれば、耳の牽引によって頭部のバランスを傾かせることで被操作者の歩行を誘導することができるので、従来の歩行ナビゲーションシステムと比べ、被操作者に対し外力として実際に牽引することなく、弱い力で、且つ直感的に歩行の誘導することができるという利点がある。
また、本発明の歩行ナビゲーションシステムによれば、GPS(Global Positioning System:全地球測位システム)機能を備えることによって、上述の問題を解決すると共に、GPSによる現在位置の確認により、目的地までの自動歩行ナビゲーションも果たすことができるという利点がある。
【図面の簡単な説明】
【0012】
【図1】本発明第1の実施の形態に係る歩行ナビゲーションシステムの構成図。
【図2】本発明第1の実施の形態に係る耳牽引装置の具体的態様を示す説明図。
【図3】本発明第1の実施の形態に係る耳牽引装置の外観を示す斜視図。
【図4】本発明第1の実施の形態に係る耳牽引手順を示すフローチャート図。
【図5】本発明第1の実施の形態に係る歩行ナビゲーションシステムの補足説明図。
【図6】本発明第2の実施の形態に係る歩行ナビゲーションシステムの構成図。
【図7】本発明第2の実施の形態に係る耳牽引手順を示すフローチャート図。
【発明を実施するための形態】
【0013】
以下、本発明に係る歩行ナビゲーションシステムの一実施の形態を、図面を参照し説明する。
【0014】
(1)第1の実施の形態
【0015】
図1は、歩行ナビゲーションシステム100の全体構成を示し、入力手段としてのコントローラ10と、耳牽引装置20とからなり、操作者がコントローラ10を操作することによって、耳牽引装置20が制御され、その耳牽引装置20を装着する被操作者の進行を所定方向に促すようになっている。
【0016】
コントローラ10は、主として、入力部1、制御部2、記憶部3、インターフェース4とからなる。
入力部1は、操作者が被操作者の進行を所定方向に促すための操作情報を入力する入力手段である。なお、以下説明の便宜のため、被操作者の視線方向を前方向、前方向に対して右側を右方向、前方向に対して左側を左方向として説明する。
入力される操作情報は、被操作者の左右、被操作者の方向転換情報としての徐々に牽引、又は一気に牽引等の牽引動作、及び牽引時間等である。
なお、これら操作情報を入力する入力部1としては既存のものを用いることができ、特に限定するものでなく、例えば自動車のハンドルのような回転型のもの、十字キー、又はスティック型のような一入力部で、上述の複数の操作情報を入力することもできる。
記憶部3は、所定の制御プログラムが記憶されているROMと、各種データを一時記憶するRAMとからなる。
制御部2は、入力部1からの操作情報に基づき、また記憶部3から所定の制御プログラムを読み出して、後述する図4の耳牽引手順に示すコントローラ10側の手順を実行して、耳牽引装置20に送信できる形式の送信信号を生成する。
インターフェース4は、有線、無線のいずれであってもよく、コントローラ10と耳牽引装置20との間の双方向通信を可能とする。
【0017】
耳牽引装置20は、主として、第1牽引部5、第2牽引部6、及び第3牽引部7、制御部8、記憶部9、インターフェース11とからなる。
記憶部9は、所定の制御プログラムが記憶されているROMと、各種データを一時記憶するRAMとからなる。
制御部8は、インターフェース11を介してコントローラ10からの受信信号から、被操作者の左右、被操作者の方向転換情報としての徐々に牽引、又は一気に牽引等の牽引動作、及び牽引時間等の操作情報を抽出し、また記憶部9から所定の制御プログラムを読み出して、後述する図4の耳牽引手順に示す耳牽引装置20側の手順を実行して、第1牽引部5、第2牽引部6、第3牽引部のすべて、またはいずれかを制御駆動するようになっている。
【0018】
図2は、耳牽引装置20の概略構成図である。図2(a)は、耳牽引装置20を装着した被操作者の上面図であり、図2(b)はその右側面図である。また図3は、外観を説明する斜視図である。
【0019】
耳牽引装置20は、主として、被操作者の左右の耳をそれぞれ挟持する、第1挟持部材12及び第2挟持部材13を前後左右方向に牽引する第1牽引部5、第2牽引部6、及び第3牽引部7と、これら第1牽引部5、第2牽引部6、及び第3牽引部7を、被操作者が装着する装着部24(本例ではいわゆるヘルメットを用いている)に固定させる複数の支持部材と、制御部8及び記憶部9と、インターフェースとしての通信機11とからなる。
【0020】
第1挟持部材12、第2挟持部材13は、夫々被操作者の左右の両耳を挟持する挟持手段であって、第1挟持部材12は被操作者の左耳を挟持し、第2挟持部材13は被操作者の右耳を挟持し、後述する第1牽引部5、第2牽引部6、及び第3牽引部7の駆動に伴って、前後、左右に牽引されて揺動するようになっている。
【0021】
第1牽引部5(左側)及び第2牽引部6(右側)は、被操作者を前後方向に誘導、すなわち被操作者の前進の促進及び前進の減速を促し、又は緩やかに左右方向への転換を促すものである。
すなわち、第1牽引部5は、所定の支持部材によって装着部24(ヘルメット)に固定され、主として、被操作者の左側に設けられモータ駆動によって被操作者の前後方向に回動する第1作動部材14と、該第1作動部材14と連結し、第1作動部材14の前後方向への回動に伴って牽引される第1ワイヤー15とからなり、該第1ワイヤー15は複数のプーリを介して、被操作者の左耳を挟持する第1挟持部材12を前後方向に揺動させるように連結してなる。
【0022】
第2牽引部6は、第1牽引部5と、被操作者に対して左右対称に設けられるものであって、主として、被操作者の右側に設けられモータ駆動によって被操作者の前後方向に回動する第2作動部材16と、該第2作動部材16と連結し、第2作動部材16の前後方向への回動に伴って牽引される第2ワイヤー17とからなり、該第2ワイヤー17は複数のプーリを介して、被操作者の右耳を挟持する第2挟持部材13を前後方向に揺動させるように連結してなる。
【0023】
この第1作動部材14、第2作動部材16が回動することによって、夫々連結する第1ワイヤー15、第2ワイヤー17が緊張し、例えば第1作動部材14、第2作動部材16双方が被操作者の後方に回動した場合、第1ワイヤー15、第2ワイヤー17双方の前側部分が緊張する。
第1挟持部材12、第2挟持部材13は、夫々第1ワイヤー15、第2ワイヤー17の前側部分の緊張に伴い前方向に揺動し、すなわち被操作者の左右の耳が前方向に牽引される。
また、一方の作動部材、例えば第2作動部材16(右側)のみが後方に回動することによって、その回動に伴って、連結する第2ワイヤー17の前側部分が緊張し、連結する第2挟持部材13は、前方向に牽引されて揺動する。すなわち被操作者の右耳が前方向に牽引される。この場合、被操作者は、緩やかに左前方向に力が働き、方向転換するよう促される。
【0024】
第3牽引部7は、被操作者を左右方向に誘導、すなわち被操作者の左右方向への転進を促すものである。
すなわち、第3牽引部7は、所定の支持部材によって装着部24(ヘルメット)上方に固定され、主として、モータ駆動によって被操作者の左右方向に回動する第3作動部材18と、該第3作動部材18と連結し、第3作動部材18の左右方向への回動に伴って牽引される第3ワイヤー19とからなり、該第3ワイヤー19は複数のプーリを介して、被操作者の左右の耳を夫々挟持する第1挟持部材12、第2挟持部材13を左右方向に揺動させるように連結してなる。
この第3作動部材18が回動することによって、連結する第3ワイヤー19が緊張し、例えば第3作動部材18が被操作者の右方向に回動した場合、第3ワイヤー19の左側部分が緊張する。
このとき、左側の第1挟持部材12は、第3ワイヤー19の左側部分の緊張に伴い左方向に牽引されて揺動し、すなわち被操作者の左耳が左方向に牽引される。この場合、被操作者は、強く左方向に牽引され、左方向への方向転換を促される。
【0025】
なお、前記第1ワイヤー15、第2ワイヤー17、及び第3ワイヤー19は、大きな加重に耐えられる強度を有し、切れにくく、例えば高密度ポリエチレンからなる釣り糸が適する。また、被操作者によって顔の大きさが異なる為、弾性力を有しているものがなお好ましい。
また、装着部24としてヘルメットを用いるようにしたが、第1牽引部5、第2牽引部6、及び第3牽引部7を被操作者の頭部に固定できればよく、これに限定されない。例えば、既存のヘッドホン形状であってもよい。
図3は、耳牽引装置20の外観を具体的に示す図である。
【0026】
図2及び図3に示す具体的態様は一例であって、本発明の趣旨を逸脱しない範囲で適宜変更することができる。
【0027】
次に図4を参照して、耳牽引手順を説明する。
図4は、耳牽引手順を示すフローチャート図であって、コントローラ10側の制御及び耳牽引装置20側の制御を便宜のため一図で表したものである。
【0028】
コントローラ10及び耳牽引装置20において、起動後各種調整が行われる。具体的には、設定情報を記憶部3、9から読み出し、モード設定(自動制御、マニュアル制御など)、又はコントローラ10側の入力部1での入力操作に対する耳牽引装置20の第1牽引部5、第2牽引部6、第3牽引部7の駆動範囲等の調整が行われる。また、インターフェース4、11が無線である場合には、このイニシャライズ処理のときにコントローラ10と耳牽引装置20との間で無線回線の接続が行われる(ステップS1)。
次に、コントローラ10において、操作者による入力部1からの入力の有無を判定し(ステップS2)、操作者による入力を検知したとき、その入力された操作情報が制御部2へ送られる。
制御部2は、この入力部1からの操作情報に基づき、記憶部3から所定の制御プログラムを読み出して、耳牽引装置20に送信できる形式の送信信号を生成する(ステップS3)。
生成された送信信号は、インターフェース4、11を介して耳牽引装置20に送信される(ステップS4)。
【0029】
耳牽引装置20では、イニシャライズの後、インターフェース4、11を介してコントローラ10から送信される信号の受信の有無を判定し、(ステップS5)受信がないときは繰返し受信判定を行う。なお、この受信判定を一定間隔で定期的に行うものであってもよく、また通常スリープ状態で、コントローラから送信される信号によって起動するようにしてもよい。
そして、コントローラ10からの信号を受信したとき、その受信信号は制御部8に送られる。
制御部8は、この受信信号から、コントローラ10の入力部1にて入力された操作情報を抽出し、記憶部9から所定の制御プログラムを読み出して、この操作情報に基づき第1牽引部5、第2牽引部6、及び第3牽引部7を駆動させる(ステップS6)。
第1牽引部5、第2牽引部6、及び第3牽引部7は、この制御部8の制御のもと駆動し、上述した所定の耳牽引動作を行う。
そして、制御部8は、耳牽引動作がすべて完了したかどうか判定し(ステップS7)、完了するまで所定の耳牽引動作を継続し、全て完了したと判定したとき、インターフェース11、4を介してコントローラ10に牽引完了通知を送信する(ステップS8)。
コントローラ10は、耳牽引装置20からの、牽引完了通知を受信し(ステップS9)耳牽引手順を終了する。
【0030】
なお、上述の操作情報につき、一例を図5に示す。
図5は、コントローラ10から入力される操作情報と、この操作情報に対応する第1牽引部5、第2牽引部6、及び第3牽引部7の各作動部材の駆動とを対応付けたものであり、コントローラ10及び耳牽引装置20の制御部2、8に記憶されている。
例えば、コントローラ10の入力部1にて、操作者によって右が入力された場合、耳牽引装置20の第1作動部材14は後方に回動し、第2作動部材16は前方に回動し、第3作動部材18は左に回動し、入力されたコントローラ10での操作継続時間(本例では右操作1分間継続)に基づき回動を継続する。この回動により、第1牽引部材12(左側)は前方へ揺動し、第2牽引部材13(右側)は、後方及び右側へ揺動し、かくして被操作者は右側へ誘導され、歩行ナビゲーションが実現される。
また、第1牽引部5、第2牽引部6のみの構成でも被操作者の歩行ナビゲーションは実現できることが図5から明らかである。第3牽引部7を備えることで、さらに牽引の精度向上を図っている。
【0031】
(2)実証実験
なお実証実験として、耳を一方向に徐々に引く、及び一気に引く牽引動作を行った。
左右それぞれの耳たぶにクリップ(第1挟持部材12、第2挟持部材13)を装着し、被験者には自然に直進歩行するように指示し、歩行中に上記2種類の刺激を提示した。
実験後の被験者の感想によると、徐々に引く場合と比べ、一気に引く場合の方が引かれる感覚が強く、進行方向が変化する感覚を生じたという回答を得た。
また比較的強い均一な張力をかけた場合、定常的にその方向に牽引され続ける感覚が生じたとの回答を得た。
この実証実験の結果により、歩行時における進行方向を誘導する手法として耳を直接引く手法につき、歩行誘導の可能性が示唆された。
【0032】
(3)第2の実施の形態
上述の第1の実施の形態において、図4の耳牽引手順として一動作として説明したが、一連の操作情報を予め入力しておくようにしても良く、例えば目的地、目的地までの距離、及び歩行者の歩行速度などを予め入力部1から入力して記憶部9に記憶しておくことにより、一連の耳牽引手順を行うことができる。
さらに、GPS機能を備えることによって、現在位置を確認しながら目的地までの自動歩行ナビゲーションシステムを実現でき、さらなるナビゲーション機能の向上が期待できる。
すなわち、第2の実施の形態にかかる歩行ナビゲーションシステム200は、第1の歩行ナビゲーションシステム100の耳牽引装置20において、さらにGPS受信部25を備える。
【0033】
なお、図中、図1に示された第1の実施の形態に対応する部分については同一の符号を付し、以下、その説明は適宜省略する。
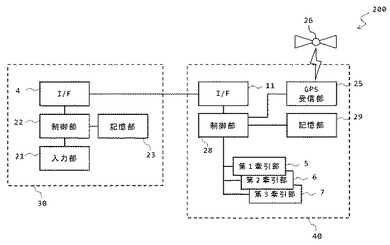
図6は、本発明第2の実施の形態に係る歩行ナビゲーションシステム200の全体構成を示し、主として、入力手段としてのコントローラ30と、耳牽引装置40と、GPS衛星26とからなり、耳牽引装置40はGPS受信部25を備えてなる。
この第2の実施の形態に係る歩行ナビゲーションシステム200においては、GPS衛星26及び耳牽引装置40のGPS受信部25により、被操作者の位置を確認すると共に、コントローラ30の入力部21から、第1の実施の形態とは異なり、地図情報に基づく目的地情報が入力され、耳牽引装置40は、その入力された目的地まで被操作者を誘導するようになっている。
【0034】
コントローラ30の記憶部23は、所定の制御プログラムに加え、さらに地図情報が記憶されているROMと、各種データを一時記憶するRAMとからなる。
入力部21は、被操作者を目的地まで誘導するための目的地情報を入力する入力手段であって、例えば、目的地の番地、地名、座標等の情報が入力される。
【0035】
耳牽引装置40のGPS受信部25は、GPS衛星26からの電波を受信し、GPS衛星26との距離から耳牽引装置40を装着する被操作者の現在位置を演算出力する。
制御部28は、コントローラ30から受信した目的地情報と、GPS衛星26から受信した位置情報とに基づき、第1牽引部5、第2牽引部6、及び第3牽引部7を制御駆動させる。また適宜、現在位置から目的地までの位置を演算し、第1牽引部5、第2牽引部6、及び第3牽引部7の制御駆動を補正する。
【0036】
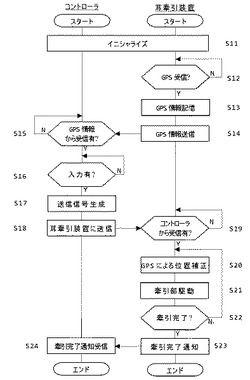
次に図7を参照して、GPSに基づく耳牽引手順について説明する。
図7は、GPSに基づく耳牽引手順を示すフローチャート図であって、コントローラ30側の制御及び耳牽引装置40側の制御を便宜のため一図で表したものである。
【0037】
コントローラ30及び耳牽引装置40において、起動後各種調整が行われる。具体的には、設定情報を記憶部から読み出し、モード設定(GPSに基づく歩行ナビゲーションモード、入力操作に基づくマニュアルモードなど)、又はコントローラ30側の入力部21での入力操作に対する耳牽引装置40の第1牽引部5、第2牽引部6、第3牽引部7の駆動範囲等の調整が行われる。また、インターフェース4、11が無線である場合には、このイニシャライズ処理のときにコントローラ30と耳牽引装置40との間で無線回線の接続が行われる(ステップS11)。
次に、耳牽引装置40において、GPS受信部25がGPS衛星26からの電波の受信を試み、GPS衛星26からの電波の受信の有無を判定する(ステップS12)。
GPS衛星26からの電波を受信したとき、GPS受信部25は、受信信号を制御部28に送信し、制御部28は、GPS衛星26との距離から耳牽引装置40の位置、すなわち耳牽引装置40を装着する被操作者の位置を演算出力し、この位置情報を記憶部29に一時記憶させる(ステップS13)。
また制御部28は、インターフェース11、4を介して、コントローラ30にこの位置情報を送信する(ステップS14)。
【0038】
コントローラ30では、イニシャライズの後、インターフェース11、4を介して耳牽引装置40から送信される位置情報の受信の有無を判定し、(ステップS15)受信がないときは繰返し受信判定を行う。
そして、耳牽引装置40からの位置情報を受信したとき、その位置情報は記憶部23にて一時記憶される。
次に、操作者による入力部21からの入力の有無を判定し(ステップS16)、操作者による入力を検知したとき、その入力された操作情報が制御部22へ送られる。ここで入力される情報は、前述の通り、被操作者を目的地まで誘導するための目的地情報である。
なお、この入力される目的地情報に関して、記憶部23に記憶している位置情報及び地図情報を参酌して入力される。また、この地図情報を、図示しない表示部で確認しつつ、被操作者の歩行ルートを詳細に入力することもできる。
制御部22は、この入力された目的地情報に基づき、記憶部23から所定の制御プログラムを読み出して、耳牽引装置40に送信できる形式の送信信号を生成する(ステップS17)。
生成された送信信号は、インターフェース4、11を介して耳牽引装置40に送信される(ステップS18)。
【0039】
耳牽引装置40では、インターフェース4、11を介してコントローラ30から送信される信号の受信の有無を判定し、(ステップS19)受信がないときは繰返し受信判定を行う。なお、この受信判定を一定間隔で定期的に行うものであってもよく、また通常スリープ状態で、コントローラ30から送信される信号によって起動するようにしてもよい。
そして、コントローラ30からの信号を受信したとき、その受信信号は制御部28に送られる。
制御部28は、この受信信号から、コントローラ30の入力部21にて入力された目的地情報を抽出し、記憶部29から所定の制御プログラム、及び位置情報を読み出して、現在位置を補正し(ステップS20)、第1牽引部5、第2牽引部6、及び第3牽引部7を駆動させる(ステップS21)。
第1牽引部5、第2牽引部6、及び第3牽引部7は、この制御部28の制御のもと駆動し、上述した所定の耳牽引動作を行う。
そして、制御部28は、耳牽引動作がすべて完了、即ち目的地に到達したかどうか判定し(ステップS22)、完了していない、すなわち目的地に到達していないと判定した場合、ステップS20乃至ステップS21のGPSによる位置補正、及び所定の耳牽引動作を行い、全て完了したと判定したとき、すなわち被操作者が目的地に到達したと判定したとき、インターフェース11、4を介してコントローラ30に牽引完了通知を送信する(ステップS23)。
コントローラ30は、牽引装置40からの、牽引完了通知を受信し(ステップS24)耳牽引手順を終了する。
【0040】
かくして、GPS情報を用いた、目的地までの歩行ナビゲーションが実現される。
なお、第2の実施の形態に係る歩行ナビゲーションシステム200において、GPS受信部25を耳牽引装置40に設けたが、被操作者自身がコントローラ30を携帯するような場合には、GPS受信部25がコントローラ側に設けられてもよい。
すなわち、携帯電話、PDA等をコントローラ30として用いるような場合が想定される。被操作者は、目的地まで携帯電話の画面を確認することなく、誘導され、従来の携帯電話やPDA端末を利用した歩行ナビゲーションシステムを著しく向上することができる。
【0041】
その他、本発明の趣旨を逸脱しない範囲で適宜変更することができる。
【符号の説明】
【0042】
1,21…入力部、2,22…制御部、3,23…記憶部、4…インターフェース、5…第1牽引部、6…第2牽引部、7…第3牽引部、8,28…制御部、9,29…記憶部、10,30…コントローラ、11…インターフェース、12…第1挟持部、13…第2挟持部、14…第1作動部材、15…第1ワイヤー、16…第2作動部材、17…第2ワイヤー、18…第3作動部材、19…第3ワイヤー、20,40…耳牽引装置、24…装着部、25…GPS受信部、26…GPS衛星、100,200…歩行ナビゲーションシステム
【特許請求の範囲】
【請求項1】
歩行者の所定の進行方向を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、
歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、
を有することを特徴とする歩行ナビゲーションシステム。
【請求項2】
歩行者の目的地を入力する入力手段と、前記入力情報を送信する送信手段と、
を有する操作装置と、
現在位置を検出する現在位置検出手段と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報および前記目的地情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、
を有することを特徴とする歩行ナビゲーションシステム。
【請求項3】
前記牽引手段は、
前記一対の挟持手段のうち一方を歩行者の進行方向に対する平行方向に牽引する第1の牽引手段及び他方を歩行者の進行方向に対する平行方向に牽引する第2の牽引手段と、前記一対の挟持手段を歩行者の進行方向に対する直交方向に牽引する第3の牽引手段と、
を有することを特徴とする請求項1または2に記載の歩行ナビゲーションシステム。
【請求項1】
歩行者の所定の進行方向を入力する入力手段と、前記入力情報を送信する送信手段と、を有する操作装置と、
歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、
を有することを特徴とする歩行ナビゲーションシステム。
【請求項2】
歩行者の目的地を入力する入力手段と、前記入力情報を送信する送信手段と、
を有する操作装置と、
現在位置を検出する現在位置検出手段と、歩行者の左右の耳を挟持する一対の挟持手段と、前記一対の挟持手段を歩行者の進行方向に対する平行方向、および/または歩行者の進行方向に対する直交方向に牽引する牽引手段と、前記入力情報を受信する受信手段と、受信した前記入力情報および前記目的地情報に基づき、前記牽引手段を制御する制御手段と、を有する耳牽引装置と、
を有することを特徴とする歩行ナビゲーションシステム。
【請求項3】
前記牽引手段は、
前記一対の挟持手段のうち一方を歩行者の進行方向に対する平行方向に牽引する第1の牽引手段及び他方を歩行者の進行方向に対する平行方向に牽引する第2の牽引手段と、前記一対の挟持手段を歩行者の進行方向に対する直交方向に牽引する第3の牽引手段と、
を有することを特徴とする請求項1または2に記載の歩行ナビゲーションシステム。
【図1】


【図2】
【図4】
【図5】

【図6】
【図7】
【図3】

【図2】
【図4】
【図5】
【図6】
【図7】
【図3】
【公開番号】特開2011−27442(P2011−27442A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−170633(P2009−170633)
【出願日】平成21年7月21日(2009.7.21)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月21日(2009.7.21)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【Fターム(参考)】
[ Back to top ]