
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、脚部により移動を行う歩行ロボット関するものである。
【背景技術】
【0002】
従来の歩行ロボットは、本体部を支持する2以上の脚部を備え、これらの脚部に設けた関節部をそれぞれ所定のタイミングで動作することにより移動する構成としていた。これらの歩行ロボットでは、着地用の足部を脚部の下端に固定した構造や、足部をアクチュエータ等で脚部に回転自在に取り付け、歩行中に脚部の動作に合わせて、足部を回転させるような構造が採用されていた。
【0003】
前述の足部を脚部に固定した構造では自然な歩行状態を再現することが難しく、傾斜地では歩行が困難であった。また、前述の脚部と足部との関節部は移動に関して冗長となる関節部であるため、小型化、軽量化、低コスト化を目的として、その関節部にアクチュエータを採用しない構造も提案されてきた。例えば、足部を脚部に対して回転させる回転力を付与する圧縮バネまたはダンパーと、関節部の回転力や足部の着地時の衝撃を減衰するダンパーを内蔵することにより、歩行時に受動的に動作する関節部を設けた歩行ロボットが開示されている(例えば、特許文献1参照)。
【0004】
【特許文献1】特開2000−176866号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来の歩行ロボットは、以上のように、各脚部が複数の関節部と各関節部を接続するアーム部から構成されるので、各関節軸を回動するアクチュエータは、本体部を支持する一方で脚を駆動するために必要な出力を有する必要があった。このため、移動に関して冗長となる関節部でも、その関節軸を回動するアクチュエータは、本体を支持するために必要な出力を有する必要があり、小型化、軽量化、低コスト化、省電力化を阻害するという課題があった。
また、これらの解決を目的とした特許文献1に示された受動関節部を設ける例でも、脚が離間している場合には、関節部を自由に動かすことができないという問題点があり、ロボットの動作表現の自由度が制限されるという課題があった。
【0006】
この発明は以上のような課題を解決するためになされたものであり、本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る歩行ロボットは、本体部と、本体部に接続され本体部を支持する少なくとも2以上の可動脚部または腕部を備え、前記脚部または腕部には回動可能な関節部を備え、該関節部には関節軸と、関節軸を回動させるためのアクチュエータとを備えており、前記脚部または腕部には、脚部または腕部の着地に連動して前記関節部の回動を規制する規制手段を備えている。
【発明の効果】
【0008】
この発明によれば、ロボット本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚が着地している状態ではその回動を規制する一方、離間した状態では自由に回動可能となるので、本体を支持するために必要な出力トルクが抑えられ、モータの小型化及び軽量化と省電力化が実現できるという効果がある。また、脚が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
以下、この発明の実施の形態1を説明する。
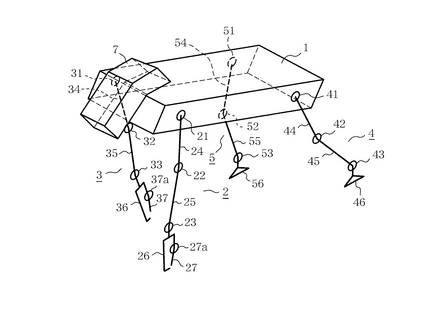
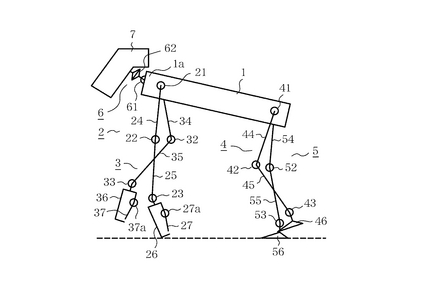
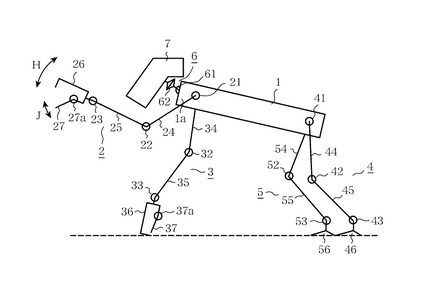
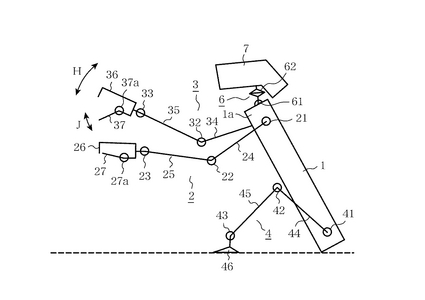
図1は、本発明による歩行ロボットの概略構成を示す斜視図であり、図2は図1に示す歩行ロボットの歩行状態を示す概略の側面図である。図1、2において、本体部に相当する胴体1は剛体で形成されていて、左前脚機構2、右前脚機構3、左後脚機構4、右後脚機構5により支持されている。胴体1の前端部1a付近には、首機構6を介して頭部7が接続されている。また、胴体1には、図示しないが、信号処理回路、電源に相当するバッテリ等が内蔵されている。
【0010】
次に、首機構6と頭部7について説明する。首機構6の下端には、首関節部に相当し、アクチュエータ、減速機構等を含む関節部61が接続されており、この関節部61を介して首機構6を胴体1に接続している。関節部61は、胴体1の前後方向を含む鉛直面内で回動する1自由度を有するので、関節部61は、首機構6を胴体1の前後方向に任意角度回動することができる。首機構6の上端は、アクチュエータ、減速機構等を含む首関節部に相当する関節部62が接続されており、この関節部62を介して頭部7を首機構6に接続している。関節部62は、首機構6の伸長方向の軸回りに回動可能な1自由度を有する。従って、頭部7は関節部61、62により、胴体1の前後方向及び左右方向に回動することが可能である。
【0011】
各脚機構2〜5はほぼ同構成であるので、以下、代表例として左前脚機構2について説明する。左前脚機構2は、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26、フィンガー部27を備えている。上肢フレーム24の上端部には、アクチュエータ、減速機構等を含む関節部21が設置されており、上肢フレーム24は関節部21を介して胴体1に接続されている。関節部21は、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部21により、上肢フレーム24を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0012】
上肢フレーム24の下端部には、アクチュエータ、減速機構等を含む関節部22が設置されている。また、関節部22は下肢フレーム25の上端部に接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部22により、下肢フレーム25を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0013】
下肢フレーム25の下端部には、アクチュエータ、減速機構等を含む関節部23が設置されている。また関節部23はハンド部26に接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部23により、ハンド部26を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0014】
また、ハンド部26には、アクチュエータ、減速機構等を含む関節部27aを介してフィンガー部27が接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。これにより、関節部27aを任意に回動することにより、ハンド部26とフィンガー部27を用いて、物体の把持等が可能な構成としている。
【0015】
なお、右前脚機構3は左前脚機構2と同様に構成されている。従って、前述の左前脚機構2、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26、関節部27a、フィンガー部27を、それぞれ右前脚機構3、関節部31、32、33、上肢フレーム34、下肢フレーム35、ハンド部36、関節部37a、フィンガー部37と読み換えることで右前足機構を説明できる。また、左後脚機構4も左前脚機構2とほぼ同様に構成されている。この場合には、前述の左前脚機構2、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26を、それぞれ左後脚機構4、関節部41、42、43、上肢フレーム44、下肢フレーム45、フット部46と読み換えることができる。同様に、右後脚機構5については、前述の左後脚機構4、関節部41、42、43、上肢フレーム44、下肢フレーム45、フット部46を、それぞれ右後脚機構5、関節部51、52、53、上肢フレーム54、下肢フレーム55、フット部56と読み換えることで、各脚部について一通り説明することができる。
【0016】
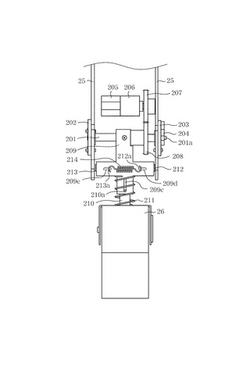
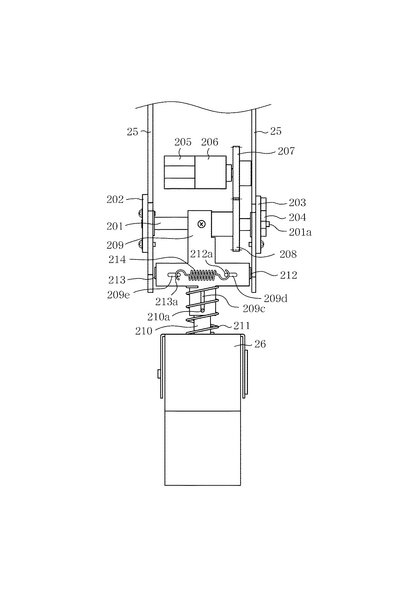
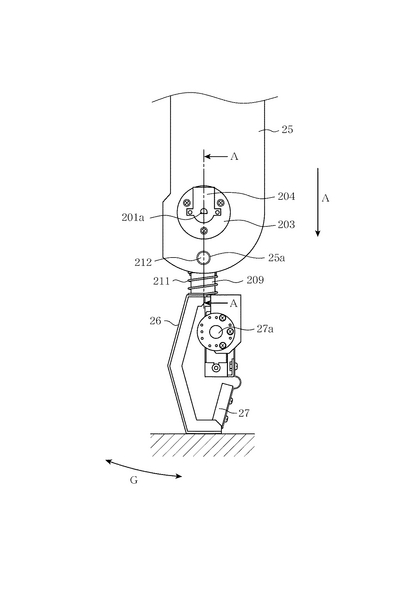
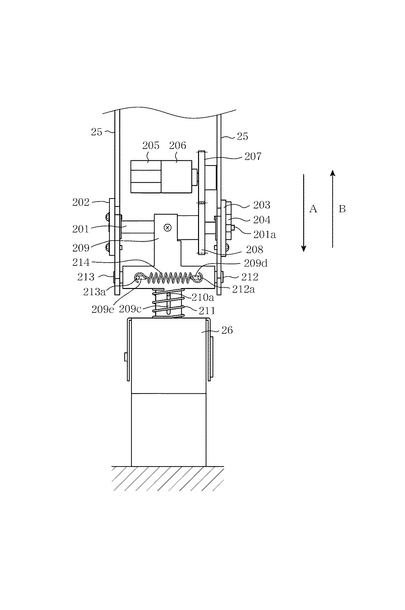
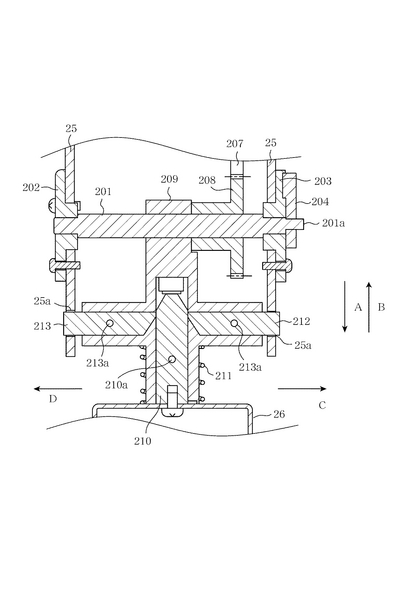
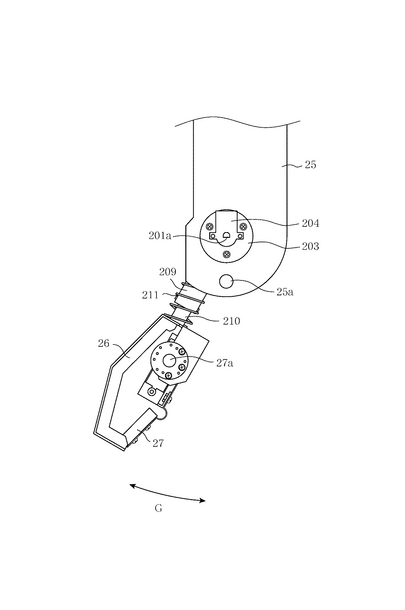
次に、手首関節部に相当する関節部23の詳細構成について説明する。図3は、実施の形態1に係る歩行ロボットの手首関節部に相当する関節部23を示す側面図、図4は図3の関節部23の正面図、図5は図3に示す関節部23のA−A線での部分断面図である。図3〜5において、関節軸201は軸受け202、203を介して回動自在に下肢フレーム25に保持されている。また、軸受け203には角度センサ204が取り付けられ、関節軸201の一端である突出部201aと角度センサ204を接続することにより、関節軸201の回動角度を検出可能としている。アクチュエータに相当するモータ205は下肢フレーム25に保持され、その同軸上には減速ギアヘッド206が接続されている。ピニオンギア207は減速ギアヘッド206の軸に保持されている。歯車208は関節軸201に保持されると共に、ピニオンギア207に噛合している。これら減速ギアヘッド206、ピニオンギア207、歯車208により減速機構を構成し、モータ205の出力を関節軸201に伝達している。
【0017】
ハウジング209は関節軸201に保持される。ハウジング209には、ハウジング209の下端から開口して鉛直方向に伸びた孔部209aが、また、孔部209aと交差するように貫通孔部209bが形成されている。孔部209aには、その下端開口部よりプッシュロッド210が並進移動可能に内挿される。プッシュロッド210の一端にはハンド部26が接続され、他端はテーパー状に形成されている。また、プッシュロッド210の表面にはピン210aが固定されており、このピン210aとハウジング209に設けられた長孔209cにより、プッシュロッド210の並進移動範囲が設定されていると共に、プッシュロッド210に接続したハンド部26が、プッシュロッド210の移動方向を軸として回転しないよう規制している。また、ハウジング209には圧縮バネ211が設置されており、ハンド部26及びプッシュロッド210を、ハンド部26の伸長方向(図5中矢印A方向)に付勢している。
【0018】
ハウジング209の貫通孔部209bには、ロックピン212、213が内挿されている。ロックピン212及び213がそれぞれ対向する端部には斜面が形成されている。また、ロックピン212の表面にはピン212aが固定されており、このピン212aとハウジング209に設けられた長孔209dにより、ロックピン212の並進移動範囲が設定されていると共に、ロックピン212がその移動方向を軸として回転しないよう規制している。ロックピン213についても同様であり、ロックピン213の表面にはピン213aが固定されており、このピン213aとハウジング209に設けられた長孔209eにより、ロックピン213の並進移動範囲が設定されていると共に、ロックピン213がその移動方向を軸として回転しないよう規制している。ロックピン212に固定されたピン212aと、ロックピン213に固定されたピン213aには引張バネ214が張架され、ロックピン212、213を対向する方向(図5中矢印E,F方向)に付勢している。下肢フレーム25にはその左右両側部分にロックピンキャッチ部に相当する孔部25aが設けられていて、孔部25aにロックピン212、213がそれぞれ嵌合した場合に関節軸201の回動が規制される。
【0019】
なお、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等あるいは略同等の構成であるので、説明を省略する。
【0020】
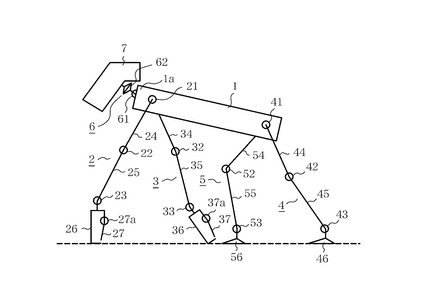
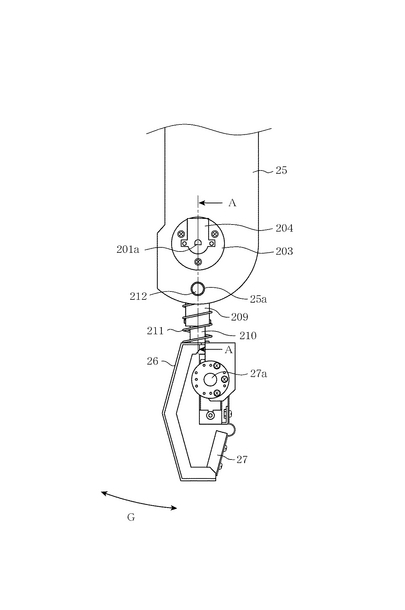
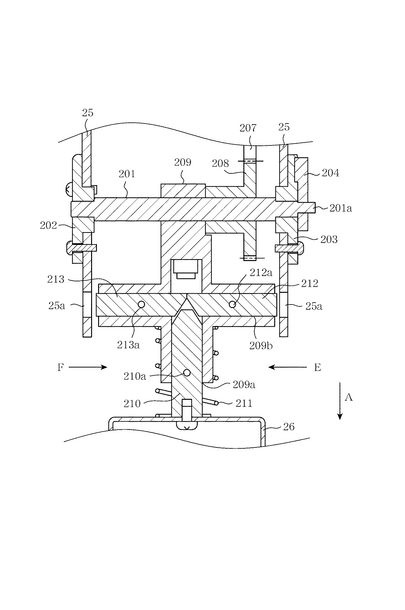
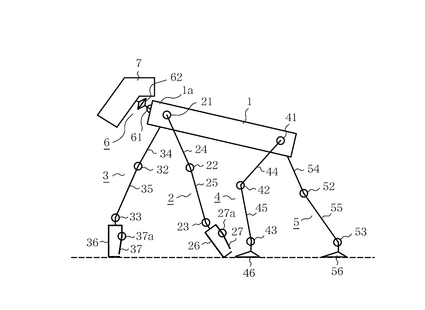
次に動作について説明する。最初に、本発明による歩行ロボットの動作を図2〜図10を用いて説明する。図6、7は図2と同様、図1に示す歩行ロボットの歩行時の状態を示す側面図である。図2、6、7の順に歩行ロボットが前進する様子を示す。図8は図1の歩行ロボットの前脚が着地している状態での、左前脚機構2の手首関節部に相当する関節部23を示す側面図であり、図9は図8に示す関節部23の正面図、図10は図8に示す関節部23のA−A線での部分断面図である。
【0021】
ロボットの歩行時には、左前脚機構2、右前脚機構3、左後脚機構4、右後脚機構5に設置された関節部21、22、31、32、41、42、51、52にそれぞれ設けられモータ(図示せず)に電流を印加して各関節部を所定の角度に制御し、胴体部1を図2に示すように支持する。図3〜5に示す関節部23は、関節軸201により、ハンド部26を図3中矢印Gの方向に回動させることができる。
【0022】
続いて、左前脚機構2の着地時の動作について説明する。図2の状態のハンド部26を着地させる前に、角度センサ204により検出される関節軸201の回動角度に基づいて、モータ205に電流を印加して関節軸201を回動制御し、ロックピン212、213と下肢フレーム25の両側に設けた孔部25aがそれぞれ対向する位置にくるように位置決めをする(図3〜5参照)。その後、図2に示すハンド部26の着地により、図8〜図10に示すように、関節部23には胴体1などの自重が図中矢印A方向に加わるので、ハンド部26に接続されたプッシュロッド210は、圧縮バネ211の付勢力に抗して図9、10中矢印B方向に並進移動する。
【0023】
一方、ロックピン212及び213は、ハンド部26が離間している状態では、図4及び図5に示すように、引張バネ214の付勢力により、その対向する端部が接触する状態でハウジング209内に格納されているが、先のプッシュロッド210の図9、10中矢印B方向への並進移動に伴い、テーパー状に形成されたプッシュロッド210の端部がロックピン212及び213の端部に形成された斜面に接触するため、引張バネ214の付勢力に抗してロックピン212は図10中矢印C方向に、またロックピン213は図10中矢印D方向に並進移動する。前述のように、ロックピン212、213と孔部25aは位置決めされているので、ロックピン212、213は下肢フレーム25に設けられた孔部25aに嵌合する。従って、ハンド部26が着地している状態では、関節軸201は回動が機械的に規制される。
【0024】
左前脚機構2が着地している状態では、関節部23の関節軸201はその回動が機械的に規制されるので、関節軸201を回動するモータ205の出力トルクは、胴体1を支持するために必要な出力トルクより小さくすることができる。また、左前脚機構2が着地している状態では、モータ205への通電を解除しても、関節部23の関節軸201の角度は保持されるので、省電力化、制御の簡素化が実現できる。
【0025】
以上、左前脚機構2の手首関節部に相当する関節部23の動作について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても同様あるいはほぼ同様の動作を行うので、説明を省略する。
【0026】
次にロボット全体での歩行動作について図2、6、7を用いて説明する。図2の状態から、関節部21、22、31、32、41、42、51、52にそれぞれ設けられたモータ(図示せず)を所定のタイミングで回転して、歩行動作を行う。例えば、図2に示す状態から前進する場合には、胴体1に対して相対的に後退している右前脚機構3、左後脚機構4を前方に繰り出す動作を行う。この時、ハンド部36及びフット部46は離間し、右前脚機構3、左後脚機構4は遊脚となるので、左前脚機構2及び右後脚機構5により胴体1を支持する。遊脚となった右前脚機構3、左後脚機構4は、その下端となるハンド部36及びフット部46が着地しないように、関節部31、32、41、42を適切に制御して、前方への脚部の繰り出し動作を行う。同時に、胴体1の支持脚である左前脚機構2、右後脚機構5に配置された各関節部21、22、51、52を適切に制御して、胴体1に対して左前脚機構2、右後脚機構5が相対的に後退する方向に移動することにより、胴体1を前方に送り出す。この動作の結果、図2に示す状態にあった歩行ロボットは、図6に示す状態を経て図7に示す状態に移行する。これらの動作を繰り返すことにより、歩行ロボットの前進移動が実現される。反対に、図7の状態から図6の状態を経て図2の状態へと順に移行することにより、後進移動を行うこともできる。
【0027】
なお、前記歩行動作中において、例えば関節部23に接続するハンド部26が離間する場合には、図3〜図5に示すように、圧縮バネ211の付勢力によりハンド部26に接続されたプッシュロッド210は図5中矢印A方向に並進移動し、これに伴い引張バネ214の付勢力によりロックピン212は図中矢印E方向、ロックピン213は図示矢印F方向に並進移動する。ロックピン212、213は下肢フレーム25に設けた孔部25aから離間するので、モータ205への通電制御を行っていない場合には、関節軸201は自由に回動可能な状態となる。このため、遊脚の繰り出し動作に伴う慣性や振動等により、関節軸201が回動した場合には、再度ハンド部26が着地するまでに、モータ205に電流を印加して関節軸201を回動制御し、ロックピン212、213と下肢フレーム25に設けた孔部25aがそれぞれ対向する位置にくるように位置決めをする。これにより、ハンド部26が再度着地した場合には、ロックピン212、213は孔部25aにそれぞれ嵌合するので、関節軸201はその回動が機械的に規制される。関節部33、43、53についても同様である。
【0028】
次に、ハンド部26、36を使用して物体を把持する動作について説明する。図11、12は図1に示すロボットの、左ハンド部を使用した物体把持の一形態を示す側面図、図13は図1に示す歩行ロボットの両前脚が離間している状態での、左手首関節部に相当する関節部23の回動動作を示す側面図である。この場合には、例えば図11に示すように、右前脚機構3、左後脚機構4、右後脚機構5が着地するよう、関節部31、32、41、42、51、52を制御して本体1を支持する。また、別の体勢による作業としては、例えば図12に示すように、胴体1の下端、及び左後脚機構4、右後脚機構5を着地して、胴体1が安定するよう関節部41、42、51、52を制御する。図11、12それぞれの体勢において、本体が転倒しないようにするために、ロボットの重心から垂下した垂線が、各着地点を結ぶ面積の範囲内に位置するように制御する。次に、左前脚機構2に設けた関節部21、22、23を制御して、先端部に設けたハンド部26を把持対象物(図示せず)に近づけた後、関節部23、27aを制御して、ハンド部26を図示矢印H方向に、またフィンガー部27を図示矢印J方向に回動して、物体把持の動作を行う。
【0029】
図12に示す体勢では、左前脚機構2と右前脚機構3を使用した両手での物体把持も可能である。この時、左前脚機構2の手首関節部に相当する関節部23は、ハンド部26が離間しているので、前述した図3〜図5に示すように、関節軸201の回動規制は解除されている。この状態では、モータ205に電流を印加することにより、関節軸201は任意の角度に制御可能であるため、ハンド部26も図13中の矢印G方向に任意に回動制御が可能となる。関節部33についても関節部22と同様であるので、説明を省略する。
【0030】
以上のように、この実施の形態1によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では機械的にその回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【0031】
なお、上記実施の形態1においては、ロックピン212及び213を孔部25aに対向させた場合に、下肢フレーム25の伸長方向と、プッシュロッド210の伸長方向がほぼ一致する位置に孔部25aを設けた例を示したが、特にこの位置に限定される必要はない。
【0032】
実施の形態2.
以下、この発明の実施の形態2を説明する。
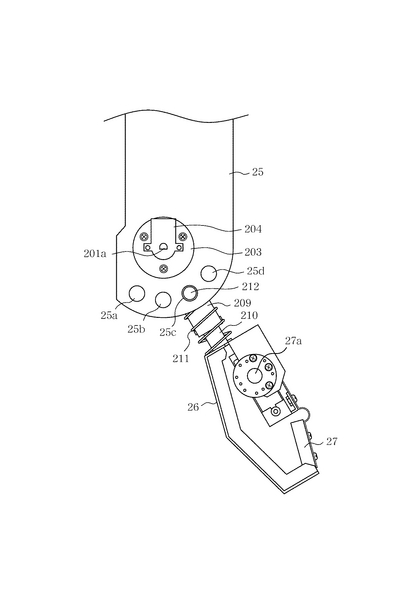
図14は、実施の形態2に係る歩行ロボットの左前脚機構2の手首関節部に相当する関節部23を示す側面図である。図14において、下肢フレーム25には、実施の形態1と同様にロックピンキャッチ部に相当する孔部25a、25b、25c、25dが設けられている。各孔部25a〜25dは、それぞれの孔中心から関節軸201の軸中心までの距離と、ロックピン212が格納される貫通孔部209b(図5参照)の孔中心から関節軸201の軸中心までの距離が一致するように設けられている。
【0033】
その他、歩行ロボット全体の構成等は実施の形態1と同様であるので説明を省略する。また、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等或いはほぼ同等の構成であるので、説明を省略する。
【0034】
次に動作について説明する。胴体1の支持、及び歩行動作に関しては実施の形態1と同様であるので省略し、ここではハンド部6が離間している状態の動作について説明する(図4、5、14参照)。ハンド部26が離間している状態では、実施の形態1と同様に、ロックピン212及び213はハウジング209内に引張バネ214の付勢力により格納されている。ハンド部26が着地する前に、角度センサ204により検出される関節軸201の回動角度に基づいて、モータ205を駆動して関節軸201を回動制御し、ロックピン212、213が下肢フレーム25に設けた孔部25a、25b、25c、25dのうち任意の孔部と対向する位置にくるように位置決めをする。その後、ハンド部26を着地すると、ロックピン212、213は先程位置決めした孔部に嵌合し、関節軸201の回動を機械的に規制する。従って、ハンド部26を着地する際に、下肢フレーム25とハンド部6との角度を任意に設定することができるので、多彩でよりバランスのとれた動作を行うことが可能となる。
。
【0035】
以上のように、この実施の形態2によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では機械的にその回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。また、脚部が着地した状態では、モータへの電力供給をしなくても機械的に関節軸の回動を規制できるので、より一層消電力化が図れるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
加えて、脚部を着地した時の関節軸の機械的な回動規制を、複数の角度で実現できるので、本体の支持または歩行において、バランスのとれた多彩な形態をとることでき、ロボットの動作表現の自由度がより一層向上する効果が得られる。
【0036】
なお、上記実施の形態1、2においては、ロックピンキャッチ部を、円形の孔部25aとした例を示したが、ブロック状その他の形状のロックピンキャッチ部を下肢フレーム25に設けてもよい。また、ロックピンキャッチ部については、実施の形態2の25a〜25dの4個に限定されるものではなく、下肢フレーム25の強度と設置スペースが許す限り任意に設けることができる。
【0037】
実施の形態3.
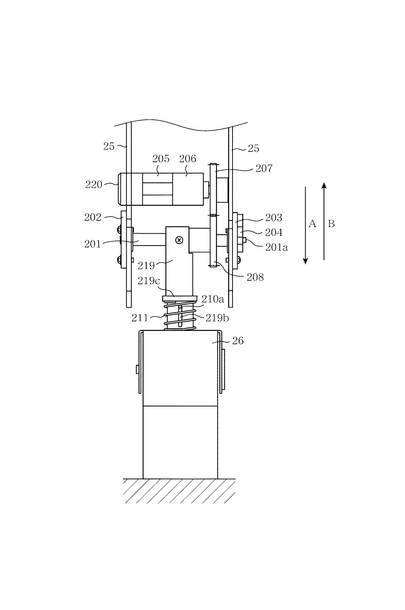
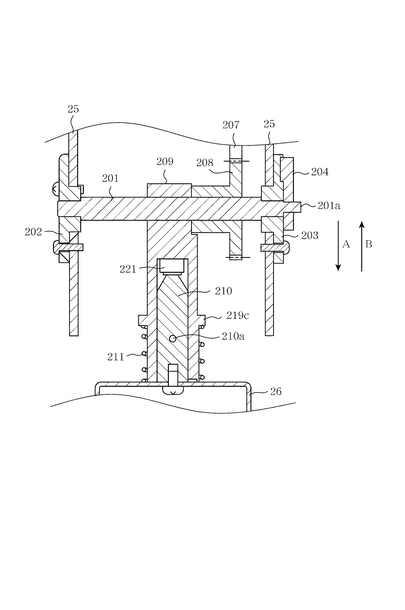
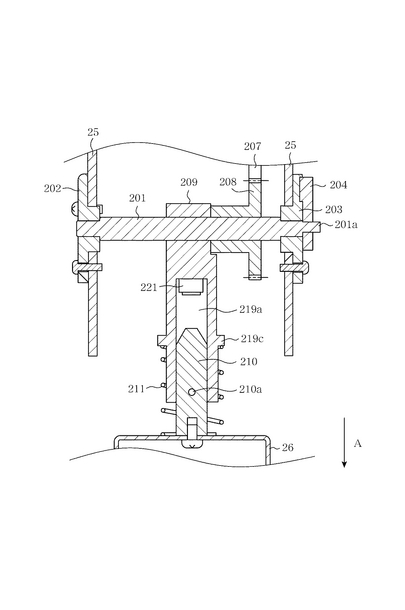
以下、この発明の実施の形態3を説明する。図15は、実施の形態3に係る歩行ロボットの左前脚機構2の手首関節部に相当する関節部23を示す側面図であり、図16は図15に示す関節部23の部分断面図(図5と同部分)である。図15、16において、関節軸201は軸受け202、203を介して回動自在に下肢フレーム25に保持されている。また、軸受け203には角度センサ204が取り付けられ、関節軸201の一端である突出部201aと角度センサ204を接続することにより、関節軸201の回動角度を検出可能な構成としている。アクチュエータに相当するモータ205は下肢フレーム25に保持され、その同軸上には減速ギアヘッド206、及び電磁ブレーキ220が接続されている。ピニオンギア207は減速ギアヘッド206の軸に保持されている。歯車201は関節軸201に保持されると共に、ピニオンギア207に噛合している。これら減速ギアヘッド206、ピニオンギア207、歯車208により減速機構を形成し、モータ205の出力を関節軸201に伝達する構成としている。
【0038】
ハウジング219は関節軸201に保持される。ハウジング219には、ハウジング219の下端から開口して鉛直方向に伸びた孔部219aが形成されている。孔部219aには、その下端開口部よりプッシュロッド210が並進移動可能に内挿される。プッシュロッド210の一端にはハンド部26が接続されている。また、プッシュロッド210の表面にはピン210aが固定されており、このピン210aとハウジング219に設けられた長孔219bにより、プッシュロッド210の並進移動範囲が設定されていると共に、プッシュロッド210に接続したハンド部26が、プッシュロッド210の移動方向を軸として回転しないよう規制している。また、ハウジング219の外周には凸部219cが形成されている。ハウジング219の凸部219cとハンド部26との間には圧縮バネ211が設置されており、ハンド部26及びプッシュロッド210を、ハンド部26の伸長方向に付勢している。また、着地検出スイッチ221が、ハウジング219の孔部219aの上端部に設置されている。
【0039】
その他、歩行ロボット全体の構成等は実施の形態1と同様であるので説明を省略する。また、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等或いはほぼ同等の構成であるので、説明を省略する。
【0040】
次に動作について説明する。図17は図16と同様、図15に示す関節部23の部分断面図(離間状態)である。図17に示すように、ハンド部26が離間している状態では、ハンド部26を接続したプッシュロッド210は圧縮バネ211の付勢力により図示矢印A方向に押圧されている。この状態では関節軸201は自由に回動可能な状態となっているので、モータ205に電流を印加することにより、関節軸201は任意の角度に回動制御することができる。従って、ハンド部26を使用した物体の把持等を行う場合には、手首関節部に相当する関節部23を任意の角度に回動制御することが可能となる。
【0041】
次に、胴体1の支持や歩行動作の際に、ハンド部26が着地する状態を図15、16に示す。この場合には、関節部23には胴体1などの自重が図中矢印A方向に加わるので、ハンド部26が接続されたプッシュロッド210は、圧縮バネ211の付勢力に抗して図示矢印B方向に並進移動し、ハウジング219の下面とハンド部26の上面が接触した状態で停止する。この時、プッシュロッド210の上端が着地検出スイッチ221を作動させ、モータ205と同軸上に設けた電磁ブレーキ220を作動して、モータ205の軸の回動を拘束する。モータ205の軸の拘束により、関節軸201は回動を規制されるので、電磁ブレーキ220の作動中は、モータ205への通電を解除しても、関節軸201の角度は保持される。
【0042】
なお、歩行動作中、支持脚から遊脚への変移に伴い、ハンド部26が離間した場合には、圧縮バネ211の付勢力によりハンド部26が接続されたプッシュロッド210は図示矢印A方向に並進移動するので、着地検出スイッチ221はオフとなり、電磁ブレーキ220によるモータ205軸の拘束は解除される。このため、遊脚の繰り出し動作に伴う慣性や振動等により、関節軸201が回動した場合には、再度ハンド部26が着地するまでに、関節軸201の角度が所定の角度となるように、モータ205に電流を印加して関節軸201を回動制御する。その後、ハンド部26の着地に伴い、電磁ブレーキ220によるモータ205軸の拘束が行われるので、関節軸201は再度回動を規制される。なお、歩行に関するその他の動作は実施の形態1と同等であるので説明を省略する。
【0043】
また、実施の形態3では左前脚機構2の着地時に、プッシュロッド210と着地検出スイッチ221が接触する構造となっているが、この構造を実施の形態1、2にも適用することができる。この構造により、着地検出スイッチ221がオンの時(着地状態)には、モータ205への通電を解除し、オフの時(離間状態)にはモータ205に通電を行うことにより、省電力効果の優れた制御を行うことができる。
【0044】
以上のように、この実施の形態3によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では関節部の回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。また、脚部が着地した状態では、モータへの電力供給をしなくても機械的に関節軸の回動を規制できるので、より一層消電力化が図れるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【0045】
なお、上記実施の形態1〜3においては、4脚を有する歩行ロボットに関して説明したが、本発明の適用範囲は4脚を有する歩行ロボットに限定されるものではなく、2脚により歩行動作を行い、2本の腕により物体の把持等の作業を行う人間型ロボットや、4脚以上、例えば6脚を有する歩行ロボット等にも適用できる。一例として、2脚により歩行動作を行う人間型ロボットへの適用について説明する。人間型ロボットの転倒状態からの立ち上がり動作を考慮した場合、腕部により本体部を支えて立ち上がる必要があり、従来は歩行には寄与しない腕部の全ての関節部、即ち歩行において冗長となる関節部についても、本体部を支持可能なトルクを持たせる必要があった。そこで、立ち上がり動作を実現するために必要とされない関節部に本発明を適用することにより、実施の形態1〜3と同様の効果を得ることができる。
【図面の簡単な説明】
【0046】
【図1】この発明の歩行ロボットの概略構成を示す斜視図である。
【図2】図1の歩行ロボットの歩行状態を示す概略の側面図である。
【図3】実施の形態1に係る歩行ロボットの左前脚の手首関節部を示す側面図(離間状態)である。
【図4】図3の手首関節部の正面図(離間状態)である。
【図5】図3の手首関節部のA−A断面図(離間状態)である。
【図6】図1の歩行ロボットの歩行状態を示す側面図(図2の次の状態)である。
【図7】図1の歩行ロボットの歩行状態を示す側面図(図6の次の状態)である。
【図8】図3の手首関節部を示す側面図(着地状態)である。
【図9】図8の状態での手首関節部の正面図(着地状態)である。
【図10】図8の手首関節部のA−A断面図(着地状態)である。
【図11】図1の歩行ロボットの左ハンド部を利用した物体把持の一形態を示す側面図である。
【図12】図11と異なる状態での、物体把持の一形態を示す側面図である。
【図13】図3の手首関節部の回動動作を示す側面図(離間状態)である。
【図14】実施の形態2に係る歩行ロボットの左前脚の手首関節部を示す側面図(離間状態)である。
【図15】実施の形態3に係る歩行ロボットの左前脚の手首関節部を示す正面図(着地状態)である。
【図16】図15の手首関節部の断面図(着地状態)である。
【図17】図15の手首関節部の断面図(離間状態)である。
【符号の説明】
【0047】
1 胴体、1a 前端部、2 左前脚機構、3 右前脚機構、4 左後脚機構、5 右後脚機構、6 首機構、7 頭部、21 関節部、22 関節部、23 関節部、24 上肢フレーム、25 下肢フレーム、25a 孔部、25b 孔部、25c 孔部、25d 孔部、26 ハンド部、27 フィンガー部、27a 関節部、31 関節部、32 関節部、33 関節部、34 上肢フレーム、35 下肢フレーム、36 ハンド部、37 フィンガー部、37a 関節部、41 関節部、42 関節部、43 関節部、44 上肢フレーム、45 下肢フレーム、46 フット部、51 関節部、52 関節部、53 関節部、54 上肢フレーム、55 下肢フレーム、56 フット部、61 関節部、62 関節部、201 関節軸、201a 突出部、202 軸受、203 軸受、204 角度センサ、205 モータ、206 減速ギアヘッド、207 ピニオンギア、208 歯車、209 ハウジング、209a 孔部、209b 貫通孔部、209c 長孔、209d 長孔、209e 長孔、210 プッシュロッド、210a ピン、211 圧縮バネ、212 ロックピン、212a ピン、213 ロックピン、213a ピン、214 引張バネ、219 ハウジング、219a 孔部、219b 長孔、219c 凸部、220 電磁ブレーキ、221 着地検出スイッチ。
【技術分野】
【0001】
この発明は、脚部により移動を行う歩行ロボット関するものである。
【背景技術】
【0002】
従来の歩行ロボットは、本体部を支持する2以上の脚部を備え、これらの脚部に設けた関節部をそれぞれ所定のタイミングで動作することにより移動する構成としていた。これらの歩行ロボットでは、着地用の足部を脚部の下端に固定した構造や、足部をアクチュエータ等で脚部に回転自在に取り付け、歩行中に脚部の動作に合わせて、足部を回転させるような構造が採用されていた。
【0003】
前述の足部を脚部に固定した構造では自然な歩行状態を再現することが難しく、傾斜地では歩行が困難であった。また、前述の脚部と足部との関節部は移動に関して冗長となる関節部であるため、小型化、軽量化、低コスト化を目的として、その関節部にアクチュエータを採用しない構造も提案されてきた。例えば、足部を脚部に対して回転させる回転力を付与する圧縮バネまたはダンパーと、関節部の回転力や足部の着地時の衝撃を減衰するダンパーを内蔵することにより、歩行時に受動的に動作する関節部を設けた歩行ロボットが開示されている(例えば、特許文献1参照)。
【0004】
【特許文献1】特開2000−176866号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来の歩行ロボットは、以上のように、各脚部が複数の関節部と各関節部を接続するアーム部から構成されるので、各関節軸を回動するアクチュエータは、本体部を支持する一方で脚を駆動するために必要な出力を有する必要があった。このため、移動に関して冗長となる関節部でも、その関節軸を回動するアクチュエータは、本体を支持するために必要な出力を有する必要があり、小型化、軽量化、低コスト化、省電力化を阻害するという課題があった。
また、これらの解決を目的とした特許文献1に示された受動関節部を設ける例でも、脚が離間している場合には、関節部を自由に動かすことができないという問題点があり、ロボットの動作表現の自由度が制限されるという課題があった。
【0006】
この発明は以上のような課題を解決するためになされたものであり、本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る歩行ロボットは、本体部と、本体部に接続され本体部を支持する少なくとも2以上の可動脚部または腕部を備え、前記脚部または腕部には回動可能な関節部を備え、該関節部には関節軸と、関節軸を回動させるためのアクチュエータとを備えており、前記脚部または腕部には、脚部または腕部の着地に連動して前記関節部の回動を規制する規制手段を備えている。
【発明の効果】
【0008】
この発明によれば、ロボット本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚が着地している状態ではその回動を規制する一方、離間した状態では自由に回動可能となるので、本体を支持するために必要な出力トルクが抑えられ、モータの小型化及び軽量化と省電力化が実現できるという効果がある。また、脚が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
以下、この発明の実施の形態1を説明する。
図1は、本発明による歩行ロボットの概略構成を示す斜視図であり、図2は図1に示す歩行ロボットの歩行状態を示す概略の側面図である。図1、2において、本体部に相当する胴体1は剛体で形成されていて、左前脚機構2、右前脚機構3、左後脚機構4、右後脚機構5により支持されている。胴体1の前端部1a付近には、首機構6を介して頭部7が接続されている。また、胴体1には、図示しないが、信号処理回路、電源に相当するバッテリ等が内蔵されている。
【0010】
次に、首機構6と頭部7について説明する。首機構6の下端には、首関節部に相当し、アクチュエータ、減速機構等を含む関節部61が接続されており、この関節部61を介して首機構6を胴体1に接続している。関節部61は、胴体1の前後方向を含む鉛直面内で回動する1自由度を有するので、関節部61は、首機構6を胴体1の前後方向に任意角度回動することができる。首機構6の上端は、アクチュエータ、減速機構等を含む首関節部に相当する関節部62が接続されており、この関節部62を介して頭部7を首機構6に接続している。関節部62は、首機構6の伸長方向の軸回りに回動可能な1自由度を有する。従って、頭部7は関節部61、62により、胴体1の前後方向及び左右方向に回動することが可能である。
【0011】
各脚機構2〜5はほぼ同構成であるので、以下、代表例として左前脚機構2について説明する。左前脚機構2は、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26、フィンガー部27を備えている。上肢フレーム24の上端部には、アクチュエータ、減速機構等を含む関節部21が設置されており、上肢フレーム24は関節部21を介して胴体1に接続されている。関節部21は、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部21により、上肢フレーム24を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0012】
上肢フレーム24の下端部には、アクチュエータ、減速機構等を含む関節部22が設置されている。また、関節部22は下肢フレーム25の上端部に接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部22により、下肢フレーム25を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0013】
下肢フレーム25の下端部には、アクチュエータ、減速機構等を含む関節部23が設置されている。また関節部23はハンド部26に接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。従って、関節部23により、ハンド部26を胴体1の前後方向に任意角度回動することが可能な構成となっている。
【0014】
また、ハンド部26には、アクチュエータ、減速機構等を含む関節部27aを介してフィンガー部27が接続されており、胴体1の前後方向を含む鉛直面内で回動する1自由度を有する。これにより、関節部27aを任意に回動することにより、ハンド部26とフィンガー部27を用いて、物体の把持等が可能な構成としている。
【0015】
なお、右前脚機構3は左前脚機構2と同様に構成されている。従って、前述の左前脚機構2、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26、関節部27a、フィンガー部27を、それぞれ右前脚機構3、関節部31、32、33、上肢フレーム34、下肢フレーム35、ハンド部36、関節部37a、フィンガー部37と読み換えることで右前足機構を説明できる。また、左後脚機構4も左前脚機構2とほぼ同様に構成されている。この場合には、前述の左前脚機構2、関節部21、22、23、上肢フレーム24、下肢フレーム25、ハンド部26を、それぞれ左後脚機構4、関節部41、42、43、上肢フレーム44、下肢フレーム45、フット部46と読み換えることができる。同様に、右後脚機構5については、前述の左後脚機構4、関節部41、42、43、上肢フレーム44、下肢フレーム45、フット部46を、それぞれ右後脚機構5、関節部51、52、53、上肢フレーム54、下肢フレーム55、フット部56と読み換えることで、各脚部について一通り説明することができる。
【0016】
次に、手首関節部に相当する関節部23の詳細構成について説明する。図3は、実施の形態1に係る歩行ロボットの手首関節部に相当する関節部23を示す側面図、図4は図3の関節部23の正面図、図5は図3に示す関節部23のA−A線での部分断面図である。図3〜5において、関節軸201は軸受け202、203を介して回動自在に下肢フレーム25に保持されている。また、軸受け203には角度センサ204が取り付けられ、関節軸201の一端である突出部201aと角度センサ204を接続することにより、関節軸201の回動角度を検出可能としている。アクチュエータに相当するモータ205は下肢フレーム25に保持され、その同軸上には減速ギアヘッド206が接続されている。ピニオンギア207は減速ギアヘッド206の軸に保持されている。歯車208は関節軸201に保持されると共に、ピニオンギア207に噛合している。これら減速ギアヘッド206、ピニオンギア207、歯車208により減速機構を構成し、モータ205の出力を関節軸201に伝達している。
【0017】
ハウジング209は関節軸201に保持される。ハウジング209には、ハウジング209の下端から開口して鉛直方向に伸びた孔部209aが、また、孔部209aと交差するように貫通孔部209bが形成されている。孔部209aには、その下端開口部よりプッシュロッド210が並進移動可能に内挿される。プッシュロッド210の一端にはハンド部26が接続され、他端はテーパー状に形成されている。また、プッシュロッド210の表面にはピン210aが固定されており、このピン210aとハウジング209に設けられた長孔209cにより、プッシュロッド210の並進移動範囲が設定されていると共に、プッシュロッド210に接続したハンド部26が、プッシュロッド210の移動方向を軸として回転しないよう規制している。また、ハウジング209には圧縮バネ211が設置されており、ハンド部26及びプッシュロッド210を、ハンド部26の伸長方向(図5中矢印A方向)に付勢している。
【0018】
ハウジング209の貫通孔部209bには、ロックピン212、213が内挿されている。ロックピン212及び213がそれぞれ対向する端部には斜面が形成されている。また、ロックピン212の表面にはピン212aが固定されており、このピン212aとハウジング209に設けられた長孔209dにより、ロックピン212の並進移動範囲が設定されていると共に、ロックピン212がその移動方向を軸として回転しないよう規制している。ロックピン213についても同様であり、ロックピン213の表面にはピン213aが固定されており、このピン213aとハウジング209に設けられた長孔209eにより、ロックピン213の並進移動範囲が設定されていると共に、ロックピン213がその移動方向を軸として回転しないよう規制している。ロックピン212に固定されたピン212aと、ロックピン213に固定されたピン213aには引張バネ214が張架され、ロックピン212、213を対向する方向(図5中矢印E,F方向)に付勢している。下肢フレーム25にはその左右両側部分にロックピンキャッチ部に相当する孔部25aが設けられていて、孔部25aにロックピン212、213がそれぞれ嵌合した場合に関節軸201の回動が規制される。
【0019】
なお、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等あるいは略同等の構成であるので、説明を省略する。
【0020】
次に動作について説明する。最初に、本発明による歩行ロボットの動作を図2〜図10を用いて説明する。図6、7は図2と同様、図1に示す歩行ロボットの歩行時の状態を示す側面図である。図2、6、7の順に歩行ロボットが前進する様子を示す。図8は図1の歩行ロボットの前脚が着地している状態での、左前脚機構2の手首関節部に相当する関節部23を示す側面図であり、図9は図8に示す関節部23の正面図、図10は図8に示す関節部23のA−A線での部分断面図である。
【0021】
ロボットの歩行時には、左前脚機構2、右前脚機構3、左後脚機構4、右後脚機構5に設置された関節部21、22、31、32、41、42、51、52にそれぞれ設けられモータ(図示せず)に電流を印加して各関節部を所定の角度に制御し、胴体部1を図2に示すように支持する。図3〜5に示す関節部23は、関節軸201により、ハンド部26を図3中矢印Gの方向に回動させることができる。
【0022】
続いて、左前脚機構2の着地時の動作について説明する。図2の状態のハンド部26を着地させる前に、角度センサ204により検出される関節軸201の回動角度に基づいて、モータ205に電流を印加して関節軸201を回動制御し、ロックピン212、213と下肢フレーム25の両側に設けた孔部25aがそれぞれ対向する位置にくるように位置決めをする(図3〜5参照)。その後、図2に示すハンド部26の着地により、図8〜図10に示すように、関節部23には胴体1などの自重が図中矢印A方向に加わるので、ハンド部26に接続されたプッシュロッド210は、圧縮バネ211の付勢力に抗して図9、10中矢印B方向に並進移動する。
【0023】
一方、ロックピン212及び213は、ハンド部26が離間している状態では、図4及び図5に示すように、引張バネ214の付勢力により、その対向する端部が接触する状態でハウジング209内に格納されているが、先のプッシュロッド210の図9、10中矢印B方向への並進移動に伴い、テーパー状に形成されたプッシュロッド210の端部がロックピン212及び213の端部に形成された斜面に接触するため、引張バネ214の付勢力に抗してロックピン212は図10中矢印C方向に、またロックピン213は図10中矢印D方向に並進移動する。前述のように、ロックピン212、213と孔部25aは位置決めされているので、ロックピン212、213は下肢フレーム25に設けられた孔部25aに嵌合する。従って、ハンド部26が着地している状態では、関節軸201は回動が機械的に規制される。
【0024】
左前脚機構2が着地している状態では、関節部23の関節軸201はその回動が機械的に規制されるので、関節軸201を回動するモータ205の出力トルクは、胴体1を支持するために必要な出力トルクより小さくすることができる。また、左前脚機構2が着地している状態では、モータ205への通電を解除しても、関節部23の関節軸201の角度は保持されるので、省電力化、制御の簡素化が実現できる。
【0025】
以上、左前脚機構2の手首関節部に相当する関節部23の動作について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても同様あるいはほぼ同様の動作を行うので、説明を省略する。
【0026】
次にロボット全体での歩行動作について図2、6、7を用いて説明する。図2の状態から、関節部21、22、31、32、41、42、51、52にそれぞれ設けられたモータ(図示せず)を所定のタイミングで回転して、歩行動作を行う。例えば、図2に示す状態から前進する場合には、胴体1に対して相対的に後退している右前脚機構3、左後脚機構4を前方に繰り出す動作を行う。この時、ハンド部36及びフット部46は離間し、右前脚機構3、左後脚機構4は遊脚となるので、左前脚機構2及び右後脚機構5により胴体1を支持する。遊脚となった右前脚機構3、左後脚機構4は、その下端となるハンド部36及びフット部46が着地しないように、関節部31、32、41、42を適切に制御して、前方への脚部の繰り出し動作を行う。同時に、胴体1の支持脚である左前脚機構2、右後脚機構5に配置された各関節部21、22、51、52を適切に制御して、胴体1に対して左前脚機構2、右後脚機構5が相対的に後退する方向に移動することにより、胴体1を前方に送り出す。この動作の結果、図2に示す状態にあった歩行ロボットは、図6に示す状態を経て図7に示す状態に移行する。これらの動作を繰り返すことにより、歩行ロボットの前進移動が実現される。反対に、図7の状態から図6の状態を経て図2の状態へと順に移行することにより、後進移動を行うこともできる。
【0027】
なお、前記歩行動作中において、例えば関節部23に接続するハンド部26が離間する場合には、図3〜図5に示すように、圧縮バネ211の付勢力によりハンド部26に接続されたプッシュロッド210は図5中矢印A方向に並進移動し、これに伴い引張バネ214の付勢力によりロックピン212は図中矢印E方向、ロックピン213は図示矢印F方向に並進移動する。ロックピン212、213は下肢フレーム25に設けた孔部25aから離間するので、モータ205への通電制御を行っていない場合には、関節軸201は自由に回動可能な状態となる。このため、遊脚の繰り出し動作に伴う慣性や振動等により、関節軸201が回動した場合には、再度ハンド部26が着地するまでに、モータ205に電流を印加して関節軸201を回動制御し、ロックピン212、213と下肢フレーム25に設けた孔部25aがそれぞれ対向する位置にくるように位置決めをする。これにより、ハンド部26が再度着地した場合には、ロックピン212、213は孔部25aにそれぞれ嵌合するので、関節軸201はその回動が機械的に規制される。関節部33、43、53についても同様である。
【0028】
次に、ハンド部26、36を使用して物体を把持する動作について説明する。図11、12は図1に示すロボットの、左ハンド部を使用した物体把持の一形態を示す側面図、図13は図1に示す歩行ロボットの両前脚が離間している状態での、左手首関節部に相当する関節部23の回動動作を示す側面図である。この場合には、例えば図11に示すように、右前脚機構3、左後脚機構4、右後脚機構5が着地するよう、関節部31、32、41、42、51、52を制御して本体1を支持する。また、別の体勢による作業としては、例えば図12に示すように、胴体1の下端、及び左後脚機構4、右後脚機構5を着地して、胴体1が安定するよう関節部41、42、51、52を制御する。図11、12それぞれの体勢において、本体が転倒しないようにするために、ロボットの重心から垂下した垂線が、各着地点を結ぶ面積の範囲内に位置するように制御する。次に、左前脚機構2に設けた関節部21、22、23を制御して、先端部に設けたハンド部26を把持対象物(図示せず)に近づけた後、関節部23、27aを制御して、ハンド部26を図示矢印H方向に、またフィンガー部27を図示矢印J方向に回動して、物体把持の動作を行う。
【0029】
図12に示す体勢では、左前脚機構2と右前脚機構3を使用した両手での物体把持も可能である。この時、左前脚機構2の手首関節部に相当する関節部23は、ハンド部26が離間しているので、前述した図3〜図5に示すように、関節軸201の回動規制は解除されている。この状態では、モータ205に電流を印加することにより、関節軸201は任意の角度に制御可能であるため、ハンド部26も図13中の矢印G方向に任意に回動制御が可能となる。関節部33についても関節部22と同様であるので、説明を省略する。
【0030】
以上のように、この実施の形態1によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では機械的にその回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【0031】
なお、上記実施の形態1においては、ロックピン212及び213を孔部25aに対向させた場合に、下肢フレーム25の伸長方向と、プッシュロッド210の伸長方向がほぼ一致する位置に孔部25aを設けた例を示したが、特にこの位置に限定される必要はない。
【0032】
実施の形態2.
以下、この発明の実施の形態2を説明する。
図14は、実施の形態2に係る歩行ロボットの左前脚機構2の手首関節部に相当する関節部23を示す側面図である。図14において、下肢フレーム25には、実施の形態1と同様にロックピンキャッチ部に相当する孔部25a、25b、25c、25dが設けられている。各孔部25a〜25dは、それぞれの孔中心から関節軸201の軸中心までの距離と、ロックピン212が格納される貫通孔部209b(図5参照)の孔中心から関節軸201の軸中心までの距離が一致するように設けられている。
【0033】
その他、歩行ロボット全体の構成等は実施の形態1と同様であるので説明を省略する。また、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等或いはほぼ同等の構成であるので、説明を省略する。
【0034】
次に動作について説明する。胴体1の支持、及び歩行動作に関しては実施の形態1と同様であるので省略し、ここではハンド部6が離間している状態の動作について説明する(図4、5、14参照)。ハンド部26が離間している状態では、実施の形態1と同様に、ロックピン212及び213はハウジング209内に引張バネ214の付勢力により格納されている。ハンド部26が着地する前に、角度センサ204により検出される関節軸201の回動角度に基づいて、モータ205を駆動して関節軸201を回動制御し、ロックピン212、213が下肢フレーム25に設けた孔部25a、25b、25c、25dのうち任意の孔部と対向する位置にくるように位置決めをする。その後、ハンド部26を着地すると、ロックピン212、213は先程位置決めした孔部に嵌合し、関節軸201の回動を機械的に規制する。従って、ハンド部26を着地する際に、下肢フレーム25とハンド部6との角度を任意に設定することができるので、多彩でよりバランスのとれた動作を行うことが可能となる。
。
【0035】
以上のように、この実施の形態2によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では機械的にその回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。また、脚部が着地した状態では、モータへの電力供給をしなくても機械的に関節軸の回動を規制できるので、より一層消電力化が図れるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
加えて、脚部を着地した時の関節軸の機械的な回動規制を、複数の角度で実現できるので、本体の支持または歩行において、バランスのとれた多彩な形態をとることでき、ロボットの動作表現の自由度がより一層向上する効果が得られる。
【0036】
なお、上記実施の形態1、2においては、ロックピンキャッチ部を、円形の孔部25aとした例を示したが、ブロック状その他の形状のロックピンキャッチ部を下肢フレーム25に設けてもよい。また、ロックピンキャッチ部については、実施の形態2の25a〜25dの4個に限定されるものではなく、下肢フレーム25の強度と設置スペースが許す限り任意に設けることができる。
【0037】
実施の形態3.
以下、この発明の実施の形態3を説明する。図15は、実施の形態3に係る歩行ロボットの左前脚機構2の手首関節部に相当する関節部23を示す側面図であり、図16は図15に示す関節部23の部分断面図(図5と同部分)である。図15、16において、関節軸201は軸受け202、203を介して回動自在に下肢フレーム25に保持されている。また、軸受け203には角度センサ204が取り付けられ、関節軸201の一端である突出部201aと角度センサ204を接続することにより、関節軸201の回動角度を検出可能な構成としている。アクチュエータに相当するモータ205は下肢フレーム25に保持され、その同軸上には減速ギアヘッド206、及び電磁ブレーキ220が接続されている。ピニオンギア207は減速ギアヘッド206の軸に保持されている。歯車201は関節軸201に保持されると共に、ピニオンギア207に噛合している。これら減速ギアヘッド206、ピニオンギア207、歯車208により減速機構を形成し、モータ205の出力を関節軸201に伝達する構成としている。
【0038】
ハウジング219は関節軸201に保持される。ハウジング219には、ハウジング219の下端から開口して鉛直方向に伸びた孔部219aが形成されている。孔部219aには、その下端開口部よりプッシュロッド210が並進移動可能に内挿される。プッシュロッド210の一端にはハンド部26が接続されている。また、プッシュロッド210の表面にはピン210aが固定されており、このピン210aとハウジング219に設けられた長孔219bにより、プッシュロッド210の並進移動範囲が設定されていると共に、プッシュロッド210に接続したハンド部26が、プッシュロッド210の移動方向を軸として回転しないよう規制している。また、ハウジング219の外周には凸部219cが形成されている。ハウジング219の凸部219cとハンド部26との間には圧縮バネ211が設置されており、ハンド部26及びプッシュロッド210を、ハンド部26の伸長方向に付勢している。また、着地検出スイッチ221が、ハウジング219の孔部219aの上端部に設置されている。
【0039】
その他、歩行ロボット全体の構成等は実施の形態1と同様であるので説明を省略する。また、左前脚機構2の手首関節部に相当する関節部23の詳細について説明してきたが、右前脚機構3の手首関節部に相当する関節部33、左後脚機構4の足首関節部に相当する関節部43、右後脚機構5の足首関節部に相当する関節部53についても、同等或いはほぼ同等の構成であるので、説明を省略する。
【0040】
次に動作について説明する。図17は図16と同様、図15に示す関節部23の部分断面図(離間状態)である。図17に示すように、ハンド部26が離間している状態では、ハンド部26を接続したプッシュロッド210は圧縮バネ211の付勢力により図示矢印A方向に押圧されている。この状態では関節軸201は自由に回動可能な状態となっているので、モータ205に電流を印加することにより、関節軸201は任意の角度に回動制御することができる。従って、ハンド部26を使用した物体の把持等を行う場合には、手首関節部に相当する関節部23を任意の角度に回動制御することが可能となる。
【0041】
次に、胴体1の支持や歩行動作の際に、ハンド部26が着地する状態を図15、16に示す。この場合には、関節部23には胴体1などの自重が図中矢印A方向に加わるので、ハンド部26が接続されたプッシュロッド210は、圧縮バネ211の付勢力に抗して図示矢印B方向に並進移動し、ハウジング219の下面とハンド部26の上面が接触した状態で停止する。この時、プッシュロッド210の上端が着地検出スイッチ221を作動させ、モータ205と同軸上に設けた電磁ブレーキ220を作動して、モータ205の軸の回動を拘束する。モータ205の軸の拘束により、関節軸201は回動を規制されるので、電磁ブレーキ220の作動中は、モータ205への通電を解除しても、関節軸201の角度は保持される。
【0042】
なお、歩行動作中、支持脚から遊脚への変移に伴い、ハンド部26が離間した場合には、圧縮バネ211の付勢力によりハンド部26が接続されたプッシュロッド210は図示矢印A方向に並進移動するので、着地検出スイッチ221はオフとなり、電磁ブレーキ220によるモータ205軸の拘束は解除される。このため、遊脚の繰り出し動作に伴う慣性や振動等により、関節軸201が回動した場合には、再度ハンド部26が着地するまでに、関節軸201の角度が所定の角度となるように、モータ205に電流を印加して関節軸201を回動制御する。その後、ハンド部26の着地に伴い、電磁ブレーキ220によるモータ205軸の拘束が行われるので、関節軸201は再度回動を規制される。なお、歩行に関するその他の動作は実施の形態1と同等であるので説明を省略する。
【0043】
また、実施の形態3では左前脚機構2の着地時に、プッシュロッド210と着地検出スイッチ221が接触する構造となっているが、この構造を実施の形態1、2にも適用することができる。この構造により、着地検出スイッチ221がオンの時(着地状態)には、モータ205への通電を解除し、オフの時(離間状態)にはモータ205に通電を行うことにより、省電力効果の優れた制御を行うことができる。
【0044】
以上のように、この実施の形態3によれば、本体部の支持または歩行において冗長となる関節部について、その関節部が装備された脚部が着地している状態では関節部の回動を規制する。従って、本体を支持するために必要な出力トルクが抑えられ、モータの小型化、軽量化と省電力化が実現できるという効果がある。また、脚部が着地した状態では、モータへの電力供給をしなくても機械的に関節軸の回動を規制できるので、より一層消電力化が図れるという効果がある。更に、脚部が離間している場合には、関節軸を任意に回動制御することが可能なので、ロボットの動作表現の自由度が向上するという効果がある。
【0045】
なお、上記実施の形態1〜3においては、4脚を有する歩行ロボットに関して説明したが、本発明の適用範囲は4脚を有する歩行ロボットに限定されるものではなく、2脚により歩行動作を行い、2本の腕により物体の把持等の作業を行う人間型ロボットや、4脚以上、例えば6脚を有する歩行ロボット等にも適用できる。一例として、2脚により歩行動作を行う人間型ロボットへの適用について説明する。人間型ロボットの転倒状態からの立ち上がり動作を考慮した場合、腕部により本体部を支えて立ち上がる必要があり、従来は歩行には寄与しない腕部の全ての関節部、即ち歩行において冗長となる関節部についても、本体部を支持可能なトルクを持たせる必要があった。そこで、立ち上がり動作を実現するために必要とされない関節部に本発明を適用することにより、実施の形態1〜3と同様の効果を得ることができる。
【図面の簡単な説明】
【0046】
【図1】この発明の歩行ロボットの概略構成を示す斜視図である。
【図2】図1の歩行ロボットの歩行状態を示す概略の側面図である。
【図3】実施の形態1に係る歩行ロボットの左前脚の手首関節部を示す側面図(離間状態)である。
【図4】図3の手首関節部の正面図(離間状態)である。
【図5】図3の手首関節部のA−A断面図(離間状態)である。
【図6】図1の歩行ロボットの歩行状態を示す側面図(図2の次の状態)である。
【図7】図1の歩行ロボットの歩行状態を示す側面図(図6の次の状態)である。
【図8】図3の手首関節部を示す側面図(着地状態)である。
【図9】図8の状態での手首関節部の正面図(着地状態)である。
【図10】図8の手首関節部のA−A断面図(着地状態)である。
【図11】図1の歩行ロボットの左ハンド部を利用した物体把持の一形態を示す側面図である。
【図12】図11と異なる状態での、物体把持の一形態を示す側面図である。
【図13】図3の手首関節部の回動動作を示す側面図(離間状態)である。
【図14】実施の形態2に係る歩行ロボットの左前脚の手首関節部を示す側面図(離間状態)である。
【図15】実施の形態3に係る歩行ロボットの左前脚の手首関節部を示す正面図(着地状態)である。
【図16】図15の手首関節部の断面図(着地状態)である。
【図17】図15の手首関節部の断面図(離間状態)である。
【符号の説明】
【0047】
1 胴体、1a 前端部、2 左前脚機構、3 右前脚機構、4 左後脚機構、5 右後脚機構、6 首機構、7 頭部、21 関節部、22 関節部、23 関節部、24 上肢フレーム、25 下肢フレーム、25a 孔部、25b 孔部、25c 孔部、25d 孔部、26 ハンド部、27 フィンガー部、27a 関節部、31 関節部、32 関節部、33 関節部、34 上肢フレーム、35 下肢フレーム、36 ハンド部、37 フィンガー部、37a 関節部、41 関節部、42 関節部、43 関節部、44 上肢フレーム、45 下肢フレーム、46 フット部、51 関節部、52 関節部、53 関節部、54 上肢フレーム、55 下肢フレーム、56 フット部、61 関節部、62 関節部、201 関節軸、201a 突出部、202 軸受、203 軸受、204 角度センサ、205 モータ、206 減速ギアヘッド、207 ピニオンギア、208 歯車、209 ハウジング、209a 孔部、209b 貫通孔部、209c 長孔、209d 長孔、209e 長孔、210 プッシュロッド、210a ピン、211 圧縮バネ、212 ロックピン、212a ピン、213 ロックピン、213a ピン、214 引張バネ、219 ハウジング、219a 孔部、219b 長孔、219c 凸部、220 電磁ブレーキ、221 着地検出スイッチ。
【特許請求の範囲】
【請求項1】
本体部と、
この本体部を支持すると共にフット部またはハンド部を回動させる関節部を有する少なくとも2以上の脚部または腕部とを備える歩行ロボットにおいて、
前記関節部に、前記フット部またはハンド部の着地に連動して前記フット部またはハンド部の回動を規制する規制手段を備えることを特徴とする歩行ロボット。
【請求項2】
前記規制手段は、
前記フット部またはハンド部の着地に連動して、付勢している第1の弾性部材に抗して並進移動するプッシュロッドと、
このプッシュロッドの並進移動に連動して、付勢している第2の弾性部材に抗して並進移動するロックピンと、
並進移動した前記ロックピンをキャッチすることにより前記前記フット部またはハンド部の回動を機械的に規制するロックピンキャッチ部とを備えることを特徴とする請求項1記載の歩行ロボット。
【請求項3】
前記関節部に前記フット部またはハンド部の回動角度を検出する角度センサを備え、
前記フット部またはハンド部の着地の前に、前記の角度センサにより検出された回動角度に基づき前記フット部またはハンド部を回動させ、前記ロックピンとロックピンキャッチ部が対抗する位置にくるように位置決めすることを特徴とする請求項2記載の歩行ロボット。
【請求項4】
前記ロックピンキャッチ部を前記フット部またはハンド部の回動方向に複数備えることを特徴とする請求項2記載の歩行ロボット。
【請求項5】
前記規制手段は、
前記フット部またはハンド部の着地に連動して、付勢している弾性部材に抗して並進移動するプッシュロッドと、
このプッシュロッドの並進移動に連動して、前記フット部またはハンド部の着地を検出する検出スイッチと、
この検出スイッチが前記フット部またはハンド部の着地を検出した際に前記前記フット部またはハンド部の回動を規制する電磁ブレーキとを備えることを特徴とする請求項1記載の歩行ロボット。
【請求項6】
前記検出スイッチが前記フット部またはハンド部の着地を検出した際に、前記関節部による回動を駆動するアクチュエータへの通電を解除することを特徴とする請求項5記載の歩行ロボット。
【請求項1】
本体部と、
この本体部を支持すると共にフット部またはハンド部を回動させる関節部を有する少なくとも2以上の脚部または腕部とを備える歩行ロボットにおいて、
前記関節部に、前記フット部またはハンド部の着地に連動して前記フット部またはハンド部の回動を規制する規制手段を備えることを特徴とする歩行ロボット。
【請求項2】
前記規制手段は、
前記フット部またはハンド部の着地に連動して、付勢している第1の弾性部材に抗して並進移動するプッシュロッドと、
このプッシュロッドの並進移動に連動して、付勢している第2の弾性部材に抗して並進移動するロックピンと、
並進移動した前記ロックピンをキャッチすることにより前記前記フット部またはハンド部の回動を機械的に規制するロックピンキャッチ部とを備えることを特徴とする請求項1記載の歩行ロボット。
【請求項3】
前記関節部に前記フット部またはハンド部の回動角度を検出する角度センサを備え、
前記フット部またはハンド部の着地の前に、前記の角度センサにより検出された回動角度に基づき前記フット部またはハンド部を回動させ、前記ロックピンとロックピンキャッチ部が対抗する位置にくるように位置決めすることを特徴とする請求項2記載の歩行ロボット。
【請求項4】
前記ロックピンキャッチ部を前記フット部またはハンド部の回動方向に複数備えることを特徴とする請求項2記載の歩行ロボット。
【請求項5】
前記規制手段は、
前記フット部またはハンド部の着地に連動して、付勢している弾性部材に抗して並進移動するプッシュロッドと、
このプッシュロッドの並進移動に連動して、前記フット部またはハンド部の着地を検出する検出スイッチと、
この検出スイッチが前記フット部またはハンド部の着地を検出した際に前記前記フット部またはハンド部の回動を規制する電磁ブレーキとを備えることを特徴とする請求項1記載の歩行ロボット。
【請求項6】
前記検出スイッチが前記フット部またはハンド部の着地を検出した際に、前記関節部による回動を駆動するアクチュエータへの通電を解除することを特徴とする請求項5記載の歩行ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2006−82205(P2006−82205A)
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願番号】特願2004−271967(P2004−271967)
【出願日】平成16年9月17日(2004.9.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願日】平成16年9月17日(2004.9.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]