
歩行信号生成装置および歩行信号生成システム
【課題】歩行者の脚が接地および離地するタイミングに精度よく同期して変化する信号を生成可能な歩行信号生成装置を提供する。
【解決手段】歩行信号生成装置は、歩行者の左右の足の底部に配される電極21、22と、電極21、22に電位を印加する電源13と、電極21、22に電流が流れると当該電流により電圧降下を起こす抵抗器14と、抵抗器14における電圧降下により変化する検出信号を出力する出力端子OUT1と、を有する。
【解決手段】歩行信号生成装置は、歩行者の左右の足の底部に配される電極21、22と、電極21、22に電位を印加する電源13と、電極21、22に電流が流れると当該電流により電圧降下を起こす抵抗器14と、抵抗器14における電圧降下により変化する検出信号を出力する出力端子OUT1と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行者の歩行に応じた信号を生成する歩行信号生成装置および歩行信号生成システムに関し、特に、歩行者の歩行周期や歩行状態を検出する際に用いて好適なものである。
【背景技術】
【0002】
従来、歩行動作の矯正や、リハビリ等を目的として、歩行者の歩行状態に応じた信号を生成するための装置が提案されている。
【0003】
この種の装置として、たとえば、足底部に圧力センサが設けられた装置が提案されている(特許文献1参照)。圧力センサは、足底部と床面との間に形成される圧力に応じたアナログ電圧を出力する。圧力センサからの電圧信号を継続的に計測することにより、脚の接地、離地等のタイミングを計測できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−192744号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
歩行状態を検出する場合、脚の接地および離地のタイミングを精度よく検出できることが好ましい。しかしながら、上記圧力センサでは、接地および離地の瞬間の前後において、圧力が緩やかに変化するため、出力される電圧信号も緩やかに変化する。このため、圧力センサを用いた場合には、脚の接地および離地の瞬間を、精度よく検出することが難しい。
【0006】
本発明は、このような課題に鑑みてなされたものであり、歩行者の脚が接地および離地するタイミングに精度よく同期して変化する信号を生成可能な歩行信号生成装置および歩行信号生成システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、歩行信号生成装置に関する。本態様に係る歩行信号生成装置は、足の底部に配される電極と、前記電極に電位を印加する電位印加部と、前記電極に電流が流れると当該電流により電圧降下を起こす電気抵抗部と、前記電圧降下により変化する検出信号を出力する出力部とを備える。
【0008】
本態様に係る歩行信号生成装置によれば、歩行時に、電極が導電性の床面に接触して電極に電流が流れると、この電流が電気抵抗部に流れ、電気抵抗部において電圧降下が生じ、出力部から出力される検出信号が変化する。このため、検出信号は、電極が床面に接触すると直ちに変化する。また、検出信号は、電気抵抗の電圧降下に応じて変化するため、変化の際の立ち上がりおよび立ち下がりが急峻となる。よって、歩行により足底が床面に接地および離地するタイミングに精度良く同期した検出信号が出力され、この検出信号により歩行者の足の接地および離地を精度よく検出することが可能となる。
【0009】
本態様に係る歩行信号生成装置において、前記出力部は、前記電気抵抗部の両端のうち一端に接続された出力端子を有するよう構成され得る。こうすると、検出信号に電気抵抗部の電圧降下を直接的に反映させることができる。
【0010】
なお、本態様に係る歩行信号生成装置において、前記電気抵抗部は、たとえば、前記電位印加部と前記電極に対して直列に接続されるよう配置され得る。この場合、電気抵抗部は、たとえば、前記電位印加部と前記電極の間に配置される。
【0011】
本態様に係る歩行信号生成装置は、一方の足の底部に、前記電極が配され、他方の足の底部に、他の電極が配され、前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成されるよう構成され得る。こうすると、歩行時に、一方の足と他方の足の両方が導電性の床面に接地したタイミングで、出力部からの検出信号が変化し、さらに、この状態から何れか一方の足が床面から離地したタイミングで、出力部からの検出信号が変化する。よって、かかる検出信号に基づいて、歩行動作時に、両脚が接地している期間(両脚支持期)と、片足が遊脚している期間(遊脚期)を良好に判別することが可能となる。
【0012】
この場合、前記電極、前記抵抗部および前記出力部からなる回路部が、前記一方の足の踵部分と足尖部分について、それぞれ配備されるよう構成され得る。こうすると、一方の足の踵と足尖が接地および離地タイミングで検出信号が変化するため、かかる検出信号に基づいて、たとえば、遊脚期に、どちらの足が遊脚状態にあるかを判別することができる。
【0013】
本態様に係る歩行信号生成装置では、前記電極、前記抵抗部および前記出力部からなる回路部が、前記足の踵部分と足尖部分について、それぞれ配備され得る。こうすると、踵部分が接地および離地したタイミングで変化する検出信号と、足尖部分が接地および離地したタイミングで変化する検出信号を、それぞれ取得することができる。
【0014】
本態様に係る歩行信号生成装置は、前記足の底部を足幅方向に分割した一方の領域に前記電極が配され、他方の領域に他の電極が配され、前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成されるように構成され得る。こうすると、当該足が接地および離地するタイミングで変化する検出信号を得ることができる。
【0015】
この場合、前記一方の領域と前記他方の領域は、前記足の底部の踵部分を足幅方向に分割した領域とされ得る。こうすると、当該足の踵部分が接地および離地するタイミングで変化する検出信号を得ることができる。
【0016】
あるいは、前記一方の領域と前記他方の領域は、前記足の底部の足尖部分を足幅方向に分割した領域とされ得る。こうすると、当該足の足尖部分が接地および離地するタイミングで変化する検出信号を得ることができる。
【0017】
本発明の第2の態様は、歩行信号生成システムに関する。本態様に係る歩行信号生成システムは、上記第1の態様に係る歩行信号生成装置と、導電性を有する床面と、を有する。本態様に係る歩行信号生成システムによれば、上記第1の態様に係る歩行信号生成装置と同様の効果が奏され得る。
【発明の効果】
【0018】
本発明によれば、歩行者の脚が接地および離地するタイミングに精度よく同期して変化する信号を生成可能な歩行信号生成装置および歩行信号生成システムを提供することができる。
【0019】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。
ただし、以下の実施の形態は、あくまでも、本発明を実施する際の一つの例示であって、本発明は、以下の実施の形態によって何ら制限されるものではない。
【図面の簡単な説明】
【0020】
【図1】歩行時の歩行の動作と歩行周期の関係を説明する図である。
【図2】実施例1に係る歩行信号生成装置の回路構成を示す図である。
【図3】実施例1に係る装着部の外観を示す図である。
【図4】実施例1に係る歩行信号生成装置の出力端子部からの出力の変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図5】実施例1に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図6】実施例2に係る歩行信号生成装置の回路構成を示す図である。
【図7】実施例2に係る装着部の外観を示す図である。
【図8】実施例2に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図9】実施例2に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図10】実施例3に係る歩行信号生成装置の回路構成を示す図である。
【図11】実施例3に係る装着部の外観を示す図である。
【図12】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図13】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図14】走行時の走行の動作と走行周期の関係を説明するための図である。
【図15】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示すタイミングチャートである。
【図16】応用例1に係る機能的電気刺激装置の構成を模式的に示す図である。
【図17】応用例1に係る機能的電気刺激装置の構成を示すブロック図である。
【図18】応用例1に係る機能的電気刺激装置の動作を模式的に示すタイミングチャートである。
【図19】応用例2に係る歩行状態表示システムの構成を模式的に示す図である。
【図20】応用例2に係る歩行状態表示システムの構成を示すブロック図である。
【図21】応用例2に係る画像表示装置の表示面に表示画面の例を示す図である。
【図22】その他の構成に係る装着部の外観を示す図である。
【図23】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図24】その他の構成に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示すタイミングチャートである。
【図25】その他の構成に係る装着部の外観を示す図である。
【図26】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図27】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図28】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図29】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図30】その他の構成に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態に係る歩行信号生成装置について説明する。本実施の形態に係る歩行信号生成装置は、たとえば、歩行周期を検出するために用いられ得る。以下、歩行周期に関する基本的事項、実施例にかかる歩行信号生成装置、および、歩行信号生成装置の応用例について、図面を参照して、順に説明する。
【0022】
<歩行周期>
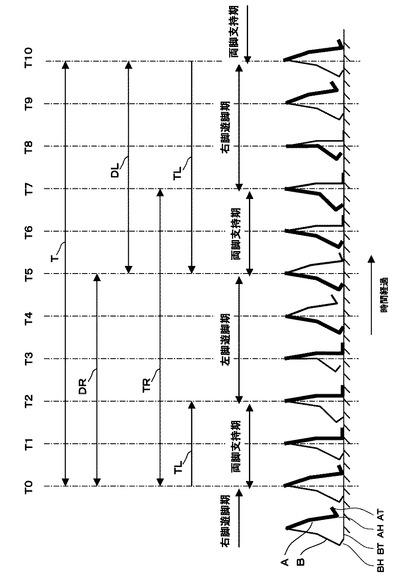
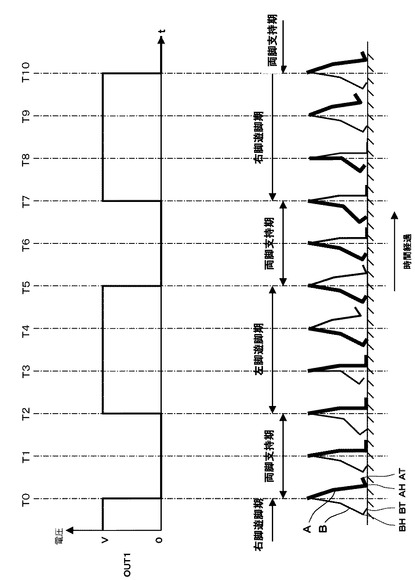
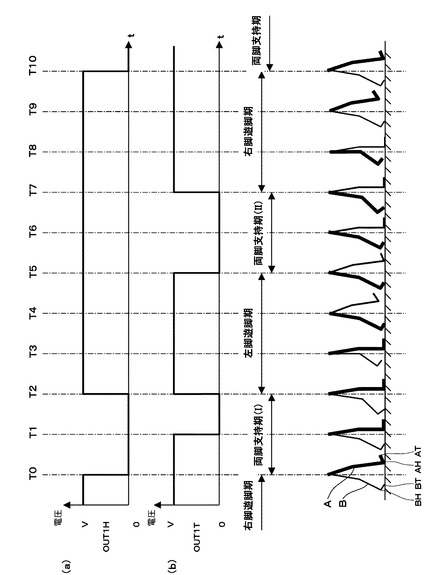
図1は、歩行者の右脚Aが接地してから、再び右脚Aが接地して同じ歩行体勢に至るまでの一連の動作と歩行周期の関係を説明するための図である。図1の最下段には歩行者の脚の動きが示されている。図1において、横軸右方向は、時間経過の方向を表す。右脚Aの踵AHが接地する右脚踵接地の瞬間T0から、次の右脚踵接地の瞬間T10までの経過時間T(秒)が、歩行動作の一周期(以下、「歩行一周期」という。)である。
【0023】
歩行一周期(T)は、両足で体を支持する両脚支持期T0〜T2およびT5〜T7、左脚Bが遊脚する左脚遊脚期T2〜T5ならびに右脚Aが遊脚する右脚遊脚期T7〜T10に大別される。
【0024】
図1の歩行例では、踵、足尖の順で接地し、踵、足尖の順で離地する。踵が接地したタイミングで両脚支持期が始まり、足尖が離地したタイミングで遊脚期が始まる。
【0025】
歩行周期の分析では、歩行一周期(T)の他、たとえば、右および左の脚が接地してから、その反対脚が接地するまでの時間(DR、DL)、右および左の脚が接地し続ける時間(右脚接地時間TR、左脚接地時間TL)などが検出される(何れも単位は秒)。この他、歩行率(60/T)等の算出が可能である。歩行率の単位はstep/分である。
【0026】
歩行速度(メートル/秒)が計測可能な場合(応用例2参照)、上記変数に加え、歩幅=歩行速度×T/2(メートル)、歩行比=歩幅/歩行率(メートル・分/step)などが、さらに算出可能である。
【0027】
このように、歩行に関する周期や時間が検出されると、歩行状態を表す各種の変数が抽出され、これらが、歩行者の歩行動作の矯正やリハビリのために利用される。
【0028】
<実施例1>
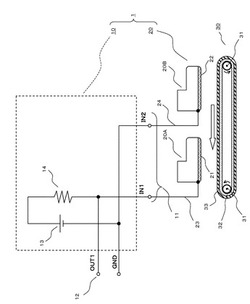
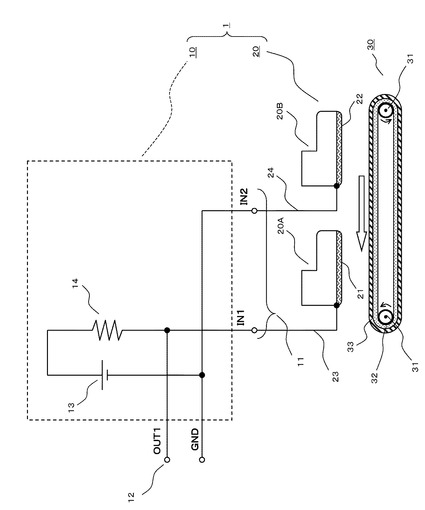
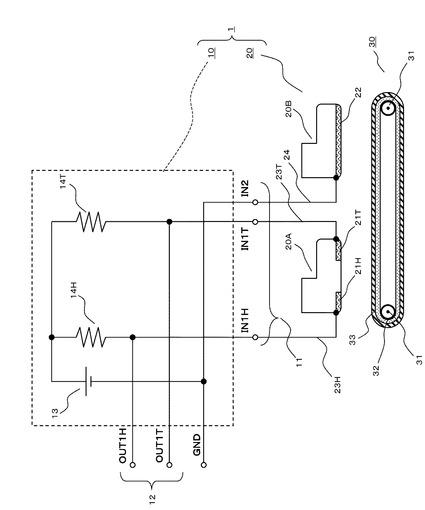
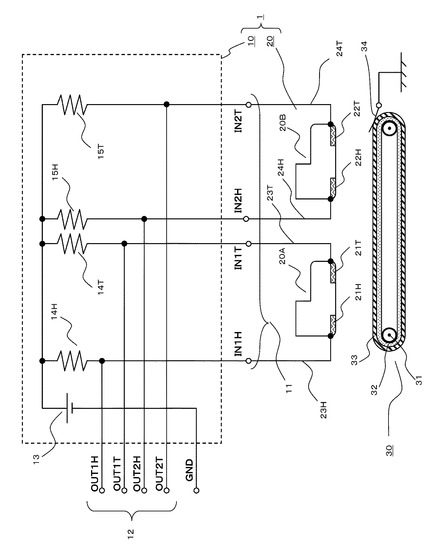
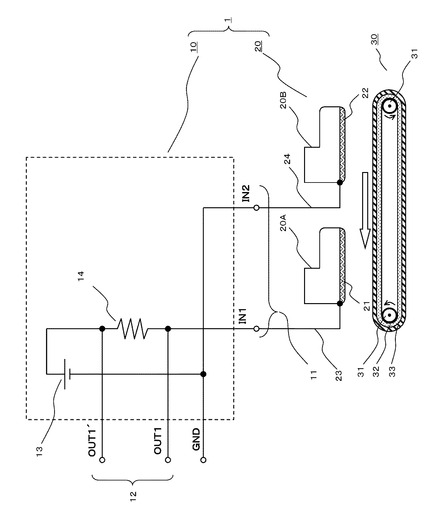
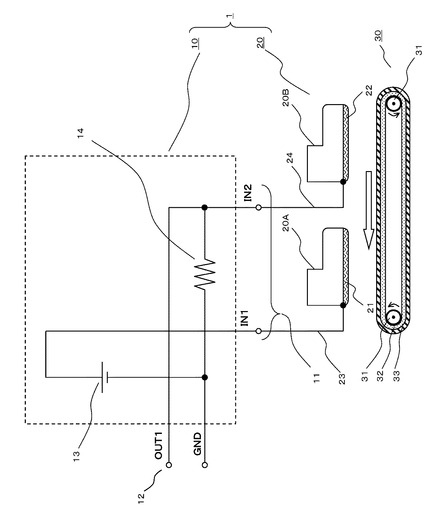
図2は、実施例1にかかる歩行信号生成装置1の回路構成を示す図である。歩行信号生成装置1は、検出回路部10および装着部20を有する。なお、歩行信号生成装置1とトレッドミル30とで構成されるシステムが、請求項に記載の歩行信号生成システムに対応する。
【0029】
なお、装着部20は、後述のように、それぞれ裏面に電極が設置された一組のソックスからなる。装着部20が歩行者の両脚へ装着された状態において歩行がなされると、歩行信号生成装置1から検出信号が出力される。本実施例では、歩行者は、トレッドミル30の上を歩行する。
【0030】
検出回路部10は、グランド端子GND、入力端子部11、出力端子部12、電源13および抵抗器14を有する。グランド端子GNDには、グランド電位が印加される。入力端子部11は、入力端子IN1および入力端子IN2からなる。出力端子部12は、出力端子OUT1からなる。
【0031】
電源13は、所定の電圧(たとえば数ボルト。以下、Vボルトとする。)の直流電圧を発生させる。電源13の負極は、グランド端子GNDに接続される。電源13の正極は、抵抗器14の一端に接続される。抵抗器14の他端は、入力端子IN1に接続される。入力端子IN2は、グランド端子GNDに接続される。出力端子OUT1は、入力端子IN1と抵抗器14との間に接続される。
【0032】
装着部20は、右脚Aに装着される右側装着部20Aと、左脚Bに装着される左側装着
部20Bとからなる。また、各装着部20A、20Bの足底部には、電極21、22が、それぞれ配されている(図3参照)。電極21と入力端子IN1とが、配線23により接続され、電極22と入力端子IN2とが、配線24により接続される。
【0033】
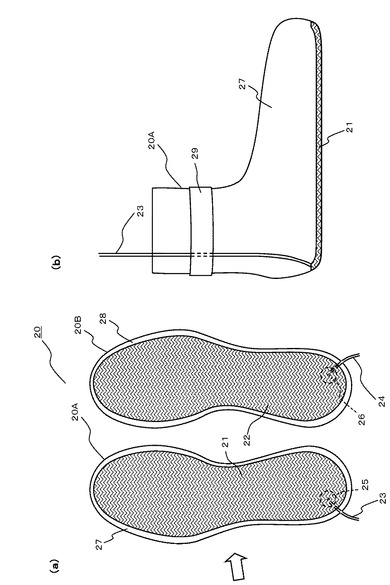
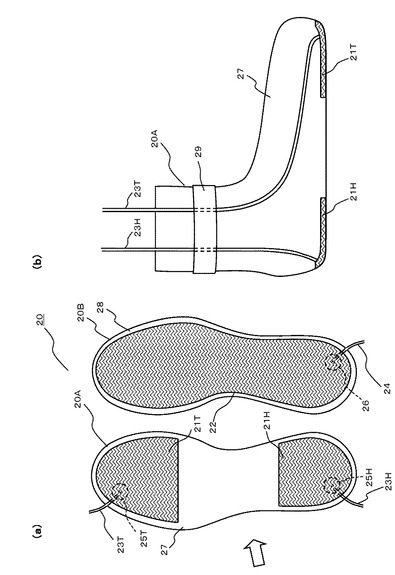
図3(a)および図3(b)は、装着部20の外観を示す図である。図3(a)は、各装着部20A、20Bの足底部を下側からみた図である。図3(b)は、右側装着部20Aを右側(図3(a)の矢印方向参照)から見た図である。
【0034】
右側装着部20Aは、電極21と靴下部27を有する。電極21は、右足の足底に似た形状の導電性布からなる。導電性布は、導電糸により形成される繊維である。導電糸は、たとえば、導電性を有するように、アルミや銅などの金属や合金等によりめっき処理が施された糸である。導電性糸は、導電性を有していればよく、めっき処理に限らず、いかなる方法により導電性が実現されていてもよい。
【0035】
電極21上面の踵部に配される接着領域25において、配線23が、導電性接着剤により、電極21に接着される。なお、図2に示す抵抗器14の抵抗値は、導電性布からなる電極21に比べて十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0036】
靴下部27は、導電性を有しない布性素材からなり、右脚用の靴下と略同様の形状を有する。なお、靴下部27の足底部には、電極21との絶縁状態が良好に保たれるよう、絶縁層(図示せず)が配されてもよい。
【0037】
上記のように配線23が電極21に接着された状態において、電極21の上面が、靴下部27の足底部に装着される。このとき、接着領域25の近傍において、配線23の一部は、図3の通り、靴下部27の足底部分と、電極21との間に挟まれた状態となる。
【0038】
接着領域25から伸びる配線23は、伸縮するバンド29によって、右脚Aに固定される。これにより、歩行時に、配線23が大きく振れることが抑制され得る。
【0039】
左側装着部20Bは、右側装着部20Aの構成と同様である。左側装着部20Bは、電極22、靴下部28およびバンド(図示せず)を有する。配線24が、電極22上面側の接着領域26において、電極22に接着され、電極22の上面が靴下部28の足底部に装着される。配線24は、バンドによって、左脚Bに固定される。
【0040】
なお、図3(b)に示されるように、右脚用の電極21は、踵部分から踵に沿って立ち上がるように湾曲し、また、足尖部分から足尖に沿って立ち上がるように湾曲している。これにより、歩行時において、右脚踵AHが接地すると同時に電極21が床面に接触し、また、右脚足尖ATが離地する最後の瞬間まで、電極21が床面に接触し続ける。この構成および作用は、左脚用の電極22も同様である。
【0041】
図2にもどり、トレッドミル30は、2つの軸31と、帯状床面32と、導電性シート33を有する。なお、図2では、便宜上、これら以外のトレッドミル30の構成は図示されていない。
【0042】
帯状床面32は、環帯状を有し、2つの軸31に巻きつけられている。導電性シート33は、導電性布からなり、帯状床面32と略同様の環帯状を有する。導電性シート33の内側の面は、帯状床面32の外側の面に装着され、帯状床面32と導電性シート33は一体化される。なお、帯状床面32は、導電性シート33と他の部材とを電気的に絶縁する構造を有する。たとえば、帯状床面32は、絶縁性を有するゴムシートからなる。
【0043】
なお、本実施例では、導電性シート33は、接地(以下、「グランド接続」と言う。)されていない。
【0044】
トレッドミル30が稼働されると、2つの軸31が、所定の回転速度で、同一方向へ回転される(矢印の回転方向参照)。軸31の回転に応じて、一体化された帯状床面32および導電性シート33が、2つの軸31の周りで回転される。これにより、導電性シート33が、所定の速度で水平方向へ移動する(白い矢印の方向参照)。こうして、歩行者は、移動される導電性シート33の上面を、歩行可能となる。
【0045】
装着部20が歩行者の脚に装着された状態で、導電性シート33上で歩行がなされると、各装着部20A、20Bの底面が接地および離地する。歩行により、2つの電極21、22の何れか一方が導電性シート33から離れていると、出力端子OUT1には、電源13の電位Vが現れる(以下、「ON」という)。また、2つの電極21、22の両方が導電性シート33に接触すると、これら電極21、22が導電性シート33を介して電気的に接続され、抵抗器14と電極21、22に電流が流れる。この電流により抵抗器14において電圧降下が生じ、出力端子OUT1の電位が立ち下がる(以下、「OFF」という)。抵抗器14の抵抗値は、電極21、22と導電性シート33の抵抗値に比べて十分に大きく設定されている。このため、OFFの出力値は略ゼロになる。
【0046】
本実施例に係る歩行信号生成装置1が出力する電圧信号は、以下に説明するように、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられるのと略同時に、すばやくONまたはOFFに切り替えられる。
【0047】
図4は、歩行動作と出力端子部12からの出力(出力端子OUT1の電位)との関係を模式的に示すタイミングチャートである。図4の下半分には、参照のために、図1と同様の歩行の動作が示されている。
【0048】
図示のとおり、出力端子OUT1からの出力は、両脚支持期であるT0〜T2およびT5〜T7においてOFFであり、それ以外の期間においてONである。出力端子OUT1からの出力がONの期間は、遊脚期である。
【0049】
本実施例では、電極21、22が入力端子IN1、IN2を接続、開放するためのスイッチの役割を果たす。すなわち、電極21、22の両方が導電性シート33に接触すると、電極21、22と導電性シート33とによって入力端子IN1、IN2が接続される。このように、本実施例では、電極21、22が電気接続のためのスイッチの役割を果たすため、出力端子OUT1からの電圧信号が変化する瞬間は、脚が接地または離地されるタイミングに略同期し、且つ、図4の出力波形は、立ち上がりおよび立ち下がりが鋭い。
【0050】
たとえば、右脚踵接地の瞬間(T0)において、右脚Aが接地し、電極21は導電性シート33に接する。なお、このとき左脚Bは接地されたままである。したがって、出力端子OUT1は、グランド端子GNDに短絡される。よって、右脚踵接地の瞬間(T0)において、出力端子OUT1からの出力は、略瞬時に、図4のグラフに示されるように(T0)、ONからOFFへ変化する。
【0051】
なお、厳密には、電極21と導電性シート33との間の電気抵抗は、電極21と導電性シート33とが接触する領域の面積に依存して変化する。しかしながら、電極21および導電性シート33の間に形成される電気抵抗は、抵抗器14の電気抵抗に比較して十分小さい。このため、電極21および導電性シート33の接触面積の変化は、出力端子OUT1からの電圧信号に影響をほとんど与えない。よって、電極21と導電性シート33とが接触した瞬間に、出力端子OUT1における電位が、略瞬時に、略Vボルトから略0ボル
トへ変化する。このため、図4に示されるように、右脚踵接地の瞬間(T0)に略同時に、電圧信号がONからOFFへ、すばやく切り替わる。
【0052】
出力端子OUT1からの電圧信号が、OFFからONへ切り換えられる場合においても、電圧信号は、脚の足尖部が離地されるのと略同時に、すばやく変化する。
【0053】
たとえば、左脚足尖離地の瞬間(T2)において、左脚Bが離地し、同時に、電極22が導電性シート33から離れる。これによって、抵抗器14に電流が流れなくなり、抵抗器14における電圧降下が0になる。したがって、左脚足尖離地の瞬間(T2)に、出力端子OUT1からの出力は、図4に示されるように、OFFからONへ変化する。
【0054】
同様に、左脚踵接地(T5)、右脚足尖離地(T7)および右脚踵接地(T10)の瞬間においても、出力端子OUT1からの電圧信号が、ONまたはOFFへ、すばやく切り替わる。
【0055】
このように出力端子OUT1からの出力がすばやく切り換わることは、歩行者の歩行動作が変わっても同じである。以下に説明されるように、歩行者が図1とは別の歩き方で歩行をした場合においても、電圧信号が、脚の接地および離地のタイミングで、ONまたはOFFへ、すばやく切り替わる。
【0056】
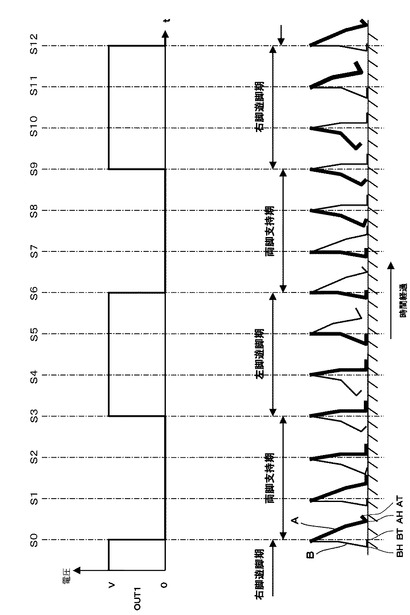
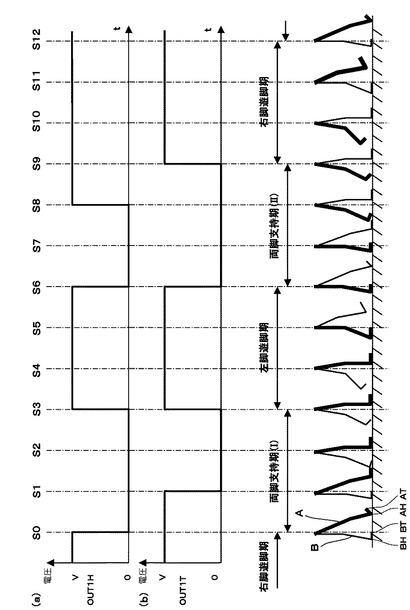
図5は、図1とは異なる歩行動作が行われたときの出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図5の下側には、図1とは異なる歩行の動作の例が示されている。
【0057】
図5に示される歩行動作は、図1の場合よりも遅く歩いた場合のものである。図1では、左脚踵BHが接地する瞬間(T5)よりも前に、右脚踵AHが離地する(T4)。これに対し、図5では、左脚踵BHが接地する瞬間(S6)から左脚足の底が接地する瞬間(S7)までの間、右脚踵AHは離地せず、それから所定時間の後に、右脚踵AHが離地される(S8)。図5において、両脚支持期は、S0〜S3およびS6〜S9である。左脚遊脚期は、S3〜S6である。右脚遊脚期はS9〜S12である。
【0058】
図5に示される歩行がなされた場合においても、出力端子OUT1からの出力は、両脚支持期S0〜S2およびS5〜S7においてOFFであり、それ以外の遊脚期においてONである。
【0059】
図5の場合においても、図4の場合と同様に、両脚支持期、右脚遊脚期および左脚遊脚期が切り替えられるのと略同時に、出力端子OUT1からの電圧信号の変化は、すばやくONまたはOFFへ切り換えられる。
【0060】
以上、本実施例によると、歩行時において、電極21、22が共に導電性シート33に接触するのと略同時に、出力端子OUT1から出力される電圧が、ON(略Vボルト)からOFF(略0ボルト)へ、略瞬間的に、すばやく切り替わる。また、電極21または電極22が導電性シート33に接触されなくなるのと略同時に、出力端子OUT1から出力される電圧は、OFFからONへ、略瞬間的に、すばやく切り替わる。このため、出力端子OUT1から出力される電圧により、歩行周期の両脚支持期および遊脚期を、容易かつ適正に、識別することができる。
【0061】
足底部に配された圧力センサが利用される場合(特許文献1参照)、圧力センサから出力されるアナログ電圧が所定の閾値を超えるか否かによって、当該圧力センサが配された位置に圧力がかかっているか否かが判定され得る。しかしながら、圧力センサから出力さ
れるアナログ電圧信号は、圧力に応じてなだらかに変化するため、上記判定では、閾値の大きさに依存して、検出されるタイミングが前後に変化し得る。これに対し、本実施例によると、出力端子OUT1の電圧信号は、ONまたはOFFへ、略瞬時に変化する。よって、閾値がどのように設定されても、現在の歩行状態が両脚支持期であるか否かの判定が適正に行われ得る。本実施例において、閾値は、たとえば、V/2ボルトに設定される。
【0062】
なお、圧力センサが用いられる場合(特許文献1参照)、歩行動作の検出出力は、立脚(支持)と遊脚の動作が繰り返されることによるヒステリシス特性、クリープ特性等の影響を受け得る。これに対し、本実施例では、検出出力(電圧信号)の生成のために、抵抗器14と電極21、22および導電性シート33が用いられるため、出力端子OUT1からの検出出力に対し、ヒステリシス特性およびクリープ特性の影響が及ぶことがない。
【0063】
また、本実施例によれば、歩行信号生成装置1は、圧力センサ等の特殊な電気または電子的素子を必要としない。よって、歩行信号生成装置1は、シンプルな回路構成を有しながらも、歩行周期の精密な検出が可能な検出出力を生成できる。
【0064】
また、本実施例では、トレッドミル30の帯状床面32の上面に、導電性シート33が配され、その上面が歩行面とされる。本実施例において、歩行者が歩行する歩行面は導電性を有していればよく、歩行面に特別な電子回路の構造を配さなくても良い。このため、歩行信号生成装置1が使用できる環境は限定されにくく、歩行信号生成装置1の利便性が向上する。
【0065】
さらに、本実施例では、電極21、22は導電性布からなるため柔軟であり、電極21、22は歩行時の足底部の変形に応じて変形する。よって、歩行信号生成装置1は、電極21、22等によって歩行者の自然な歩行動作を妨げられることなく、歩行者の自然な歩行動作に基づく適切な歩行信号を出力し得る。
【0066】
なお、歩行信号生成のために小型の圧力センサを用いる場合、圧力センサの足底部への張り付け位置の調節が困難である。これに対し、本実施例の構成によれば、電極21、22は、導電性布からなるため、靴下部27、28の足底部の所望の位置に、容易に装着可能である。また、本実施例の電極21、22は、柔軟な導電性布からなるため、固い靴底だけでなく、柔軟な靴や靴下にも対応可能である。
【0067】
また、歩行信号生成のために大型の圧力センサを用いる場合、遊脚時の足裏の変形に伴って信号が誤検出されることが起こり得る。これに対し、本実施例の構成では、足裏の電極21または22が導電性シート33から離れると、次に電極21または22が導電性シート33に接触するまで、絶縁状態が保たれる。このため、遊脚時の足裏の変形が、歩行信号生成装置1の出力端子OUT1からの出力に影響を与えることはなく、足裏の変形に伴って信号が誤検出されることは起こり得ない。
【0068】
また、大型の圧力センサは高価であるが、導電性布からなる電極21、22は比較的安価である。本実施例によれば、歩行信号生成装置1を、シンプルな回路構成により実現でき、コストの抑制を図りながら精度の良い検出信号を得ることができる。
【0069】
<実施例2>
上記実施例1では、電極21、22が、左右の各装着部20A、20Bにそれぞれ一つずつ配された。これに対し、実施例2では、右側装着部20Aに、2つの電極(21H、21T)が配される。このような構成がとられることにより、遊脚期に、どちらの脚が遊脚状態にあるかが判別可能になる。すなわち、上記実施例1における遊脚期が、さらに右脚遊脚期と左脚遊脚期とに識別され得る。
【0070】
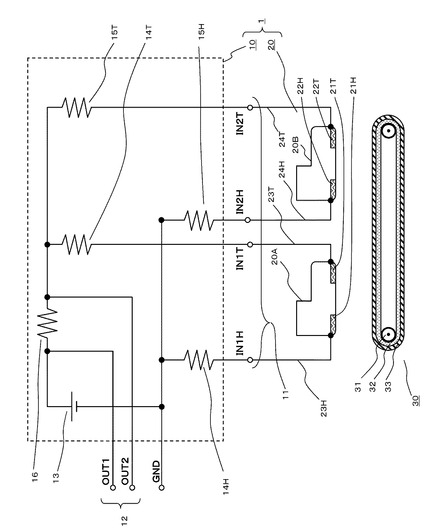
図6は、本実施例にかかる歩行信号生成装置1の回路構成を示す図である。図6の電気回路では、図2の回路構成に対し、装着部20Aの電極21が2つの電極21H、21Tに置き換えられ、抵抗器14が2つの抵抗器14H、14Tに置き換えられ、入力端子部11の入力端子IN1が2つの入力端子IN1H、IN1Tに置き換えられ、出力端子部12の出力端子OUT1が2つの出力端子OUT1H、OUT1Tに置き換えられている。
【0071】
具体的には、図2の構成に比べて、右側装着部20Aの電極が、2つの電極21H、21Tに分離され、配線23Tと、抵抗器14Tと、出力端子OUT1Tが追加されている。配線23Hは、踵側の電極21Hと入力端子IN1Hとを接続し、配線23Tは、足尖側の電極21Tと入力端子IN1Tとを接続する。入力端子IN1H、IN1Tと、電源13の正極との間に、それぞれ、2つの抵抗器14H、14Tが直列に接続される。抵抗器14H、14Tは、導電性布(電極21H、21T、22、導電シート33)に比較して、十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0072】
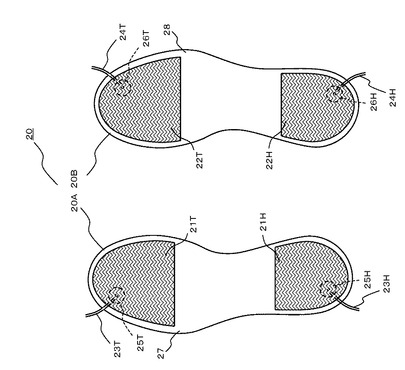
図7(a)および図7(b)は、装着部20の構成を示す図である。図7(a)は、各装着部20A、20Bの足底部を下側からみた図である。図7(b)は、右側装着部20Aを右側(図7(a)の矢印方向参照)から見た図である。
【0073】
電極21Hは、導電性布からなり、靴下部27の踵部分を覆うように、踵側が踵部分に沿って湾曲した形状を有する。配線23Hは、電極21H上面の踵部分に配される接着領域25Hにおいて、導電性接着剤により、電極21Hに接着される。このように配線23Hが電極21Hに接着された状態において、電極21Hの上面が、靴下部27の踵部に装着される。
【0074】
電極21Tも、電極21Hと同様、導電性布からなる。電極21Tは、靴下部27の足尖部分を覆うように、足尖側が足尖部に沿って湾曲した形状を有する。配線23Tは、電極21T上面の足尖部分に配される接着領域25Tにおいて、導電性接着剤により、電極21Tに接着される。このように配線23Tが電極21Tに接着された状態において、電極21Tの上面が、靴下部27の足尖部に、装着される。
【0075】
接着領域25H、25Tから伸びる2本の配線23H、23Tは、伸縮するバンド29によって、右脚Aに固定される。なお、左側装着部20Bの構成は、実施例1における左側装着部20Bの構成と同じである。
【0076】
図7の構成により、右側装着部20Aが歩行者の右脚Aに装着された状態で、トレッドミル30上で歩行がなされると、右脚踵AHが接地されたタイミングで電極21Hが導電性シート33に接触し、次に、電極21H、21Tの両方が導電性シート33に接触し、その後、電極21Tのみが導電性シート33に接触し、最後に、右脚足尖ATが離地されるタイミングで電極21Tが導電性シート33から離れるようになる。
【0077】
図6を参照して、電極22が導電性シート33に接触した状態で、電極21Tと電極21Hの両方が導電性シート33から離れていると、出力端子OUT1H、OUT1Tには、電源13の電位Vが現れる(出力値ON)。また、電極22が導電性シート33に接触した状態で、電極21Hが導電性シート33に接触すると、出力端子OUT1Hの電位が略ゼロ電位に立ち下がる(出力値OFF)。電極22が導電性シート33に接触した状態で、電極21Tが導電性シート33に接触すると、出力端子OUT1Tの電位が略ゼロ電位に立ち下がる(出力値OFF)。さらに、電極21Tと電極21Hの両方、または、何れか一方が導電性シートに接触した状態で、電極22が導電性シート33から離れると、
出力端子OUT1H、OUT1Tの電位はVとなる(出力ON)。
【0078】
図8は、図1と同様の歩行が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図8の下側には、参照のために、図1と同様の歩行の動作が示される。図8(a)、(b)には、それぞれ、出力端子OUT1H、OUT1Tの出力値が示されている。
【0079】
図8(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地し且つ左脚Bが立脚している期間T0〜T2においてOFFであり、それ以外の期間においてONである。また、図8(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地し且つ左脚Bが立脚している期間T1〜T2およびT5〜T7においてOFFであり、それ以外の期間においてONである。
【0080】
上記実施例1と同様の理由から、本実施例においても、出力端子OUT1Hからの電圧信号は、右脚踵AHが接地(T0)または左脚足尖BTが離地(T2)がされると略同じタイミングで変化し、電圧信号の立ち上がりおよび立ち下がりは鋭い。また、出力端子OUT1Tからの電圧信号は、右脚足尖ATが接地(T1)、左足足尖BTが離地(T2)、左脚踵BHが接地(T5)または右脚足尖ATが離地(T7)がされると略同じタイミングで変化し、電圧信号の立ち上がりおよび立ち下がりは鋭い。
【0081】
図9は、図5で説明された歩行動作が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図9(a)は、出力端子OUT1Hからの出力値を示し、図9(b)は、出力端子OUT1Tの出力値を示す。
【0082】
図9(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地し且つ左脚Bが立脚している期間S0〜S3およびS6〜S8においてOFFであり、それ以外の期間においてONである。また、図9(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地し且つ左脚Bが立脚している期間S1〜S3およびS6〜S9においてOFFであり、それ以外の期間においてONである。
【0083】
図8の場合と同様に、図9の場合における出力端子OUT1H、OUT1Tからの電圧信号は、右脚Aの踵部AHもしくは足尖部ATまたは左脚Bが接地または離地されると略同じタイミングで変化し、図9(a)および(b)の出力波形の立ち上がりおよび立ち下がりは鋭い。
【0084】
このように、歩行動作がどのようであっても、出力端子OUT1H、OUT1Tからの電圧信号が変化するタイミングは、脚が接地または離地されるタイミングに略同じであり、出力波形の立ち上がりおよび立ち下がりは鋭い。
【0085】
図8(a)および(b)または図9(a)および(b)において、両脚支持期、右脚遊脚期および左脚遊脚期は、以下のようにして、識別される。
【0086】
まず、両脚支持期は、出力端子OUT1Hおよび出力端子OUT1Tのうち少なくとも一方の出力がOFFである期間である。
【0087】
なお、歩行においては、2種類の両脚支持期がある。一つは、右脚Aが接地することにより開始される両脚支持期(以下、「両脚支持期(I)」と言う。)であり、もう一つは、左脚Bが接地することにより開始される両脚支持期(以下、「両脚支持期(II)」と言う。)である。
【0088】
両脚支持期(I)は、出力端子OUT1Hの出力が先にOFFへ変化することにより開始される。これに対し、両脚支持期(II)では、出力端子OUT1Hからの出力が先にOFFへ変化することはない。このように、出力端子OUT1Hからの出力が先にOFFに変化するか否かによって、両脚支持期が両脚支持期(I)と両脚支持期(II)の何れであるかが識別可能である。
【0089】
図8において、両脚支持期(I)は、T0〜T2であり、両脚支持期(II)は、T5〜T7である。図9において、両脚支持期(I)は、S0〜S3であり、両脚支持期(II)は、S6〜S9である。
【0090】
右脚遊脚期は、両脚支持期(I)の前の遊脚期(T7〜T10、S9〜S12)である。別の言い方では、右脚遊脚期は、両脚支持期(II)の後の遊脚期である。左脚遊脚期は、両脚支持期(II)の前の遊脚期(T2〜T5、S3〜S6)である。別の言い方では、右脚遊脚期は、両脚支持期(I)の後の遊脚期である。
【0091】
この他、遊脚期に入る直前の出力端子OUT1TのOFFの長さによって、その遊脚期が左脚遊脚期であるか右脚遊脚期であるかを識別することも可能である。たとえば、図8のタイミングT1において右脚Aの足尖ATが接地してからタイミングT2において左脚Bが離地されるまでの期間Tbは通常比較的短く、タイミングT5において左脚踵BHが接地してからタイミングT7において右脚Aが離地されるまでの期間Taは、接地位置が左脚Bの踵BHから足尖BTに移行する期間だけ、Tbよりも長い。よって、遊脚期に入る前のOFF期間の長さを互いに比較することにより、その遊脚期が、右脚遊脚期か左脚遊脚期かを判別可能である。
【0092】
以上のようにして、本実施例では、両脚支持期、右脚遊脚期および左脚遊脚期を、出力端子部12からの出力に基づいて識別可能である。
【0093】
以上、本実施例によると、歩行時において、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、出力端子OUT1HまたはOUT1Tからの電圧信号が、ONまたはOFFへ切り替えられる。このとき、電圧信号の立ち上がりおよび立ち下がりは、鋭い。出力端子OUT1H、OUT1Tからの電圧信号の立ち上がりおよび立ち下がりが鋭いため、両脚支持期、左脚遊脚期および右脚遊脚期の識別が精度よく行える。よって、本実施例においても、歩行周期を、良好に検出することが可能となる。
【0094】
<実施例3>
上記実施例2では、左脚Bの踵および足尖が接地および離地するタイミング(T6、S7)が個別に検出されなかった。これに対し、実施例3では、両脚の踵および足尖が接地および離地するタイミングが、それぞれ個別に検出される。
【0095】
なお、上記実施例1、2では、導電性シート33は接地(グランド接続)されなかったが、本実施例では、トレッドミル30に備えられる導電性シート33は、グランド接続される。
【0096】
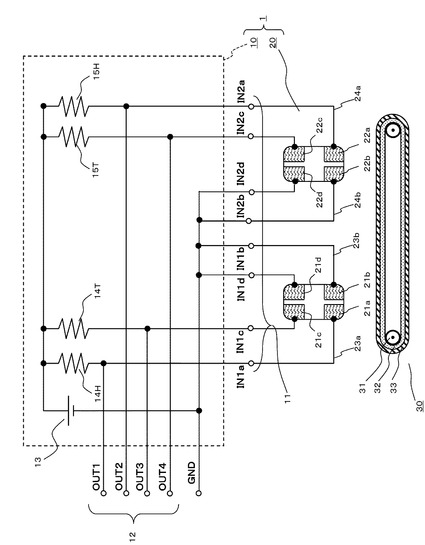
図10は、本実施例に係る歩行信号生成装置1の回路構成を示す図である。図10の回路では、図6の回路構成に対し、電極22が2つの電極22H、22Tに置き換えられ、2つの抵抗器15H、15Tが追加され、入力端子部11の入力端子IN2が2つの入力端子IN2H、IN2Tに置き換えられ、出力端子部12に2つの出力端子OUT2H、OUT2Tに加えられている。さらに、トレッドミル30の導電性シート33が、接地される。これにより、導電性シート33には、常にグランド電位が印加される。
【0097】
具体的には、図6の構成に比べて、左側装着部20Bの電極が、2つの電極22H、22Tに分離され、配線24Tと、抵抗器15Tと、出力端子OUT2Tが追加されている。配線24Hは、踵側の電極22Hと入力端子IN2Hとを接続し、配線24Tは、足尖側の電極22Tと入力端子IN2Tとを接続する。入力端子IN2H、IN2Tと電源13の正極との間に、それぞれ、2つの抵抗器15H、15Tが直列に接続される。抵抗器15H、15Tは、上記実施例1、2と同様、導電性布(電極21H、21T、22H、22T、導電シート33)に比較して、十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0098】
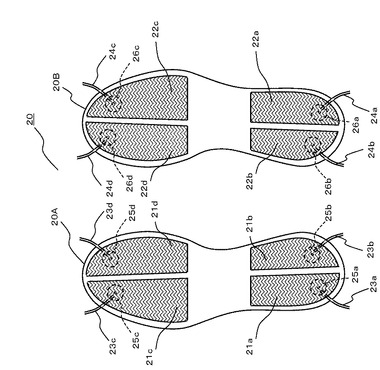
図11は、装着部20の構成を示す図である。図11の右側装着部20Aは、図7(a)の右側装着部20Aの構成と同じである。図11の左側装着部20Bは、図7(a)の右側装着部20Aに装着される電極および配線の構成を、左右反転して、左側装着部20Bへ適用したものである。
【0099】
すなわち、左側装着部20Bにおいて、電極22Hは、導電性布からなり、左脚Bの足底の踵部を覆う。配線24Hは、接着領域26Hにおいて、導電性接着剤により、電極22Hに接着される。電極22Tは、導電性布からなり、左脚Bの足底の足尖部を覆う。配線24Tは、接着領域26Tにおいて、導電性接着剤により、電極22Tに接着される。2本の配線24H、24Tは、伸縮するバンド(図示せず)によって、右脚Aに固定される。
【0100】
左側装着部20Bが歩行者の左脚Bに装着された状態で、トレッドミル30上で歩行がなされると、左脚踵BHが接地がされたタイミングで電極22Hが導電性シート33に接触し、次に、電極22H、22Tの両方が導電性シート33に接触し、その後、電極22Tのみが導電性シート33に接触し、最後に、右脚足尖ATが離地されるタイミングで、電極22Tが導電性シート33から離れるようになる。
【0101】
図10を参照して、電極21H、21T、22H、22Tが導電性シート33に接触していなければ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tには、それぞれ、電源13の電位Vが現れる(出力ON)。また、電極21H、21T、22H、22Tが導電性シート33に接触すると、導電性シート33が接地されているため、出力端子OUT1H、OUT1T、OUT2H、OUT2Tの電位は、それぞれ、略ゼロ電位に立ち下がる(出力OFF)。
【0102】
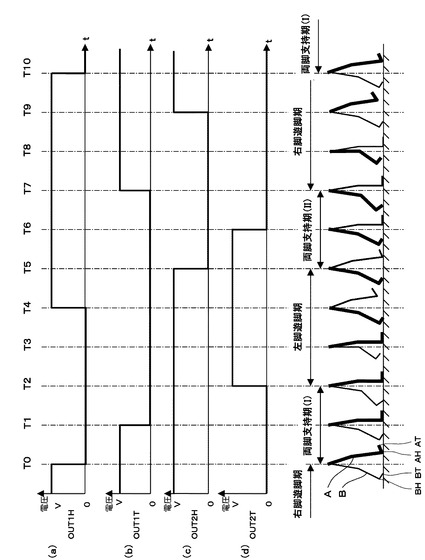
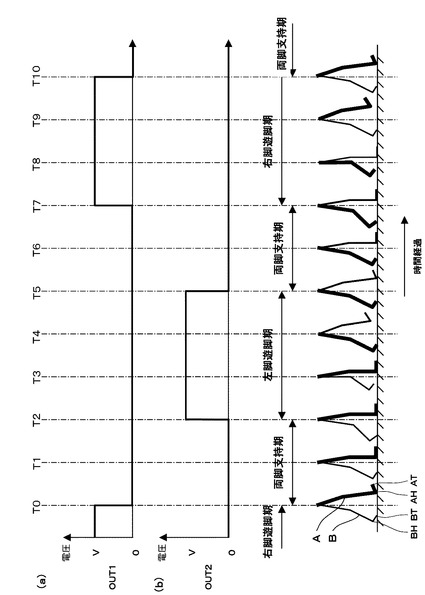
図12は、図1と同様の歩行が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図12(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。
【0103】
図12(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地している期間T0〜T4においてOFFであり、それ以外の期間においてONである。図12(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地している期間T1〜T7においてOFFであり、それ以外の期間においてONである。図12(c)において、出力端子OUT2Hからの出力は、左脚踵BHが接地している期間T5〜T9においてOFFであり、それ以外の期間においてONである。図12(d)において、出力端子OUT2Tからの出力は、左脚足尖BTが接地している期間T6〜T10およびT0〜T2においてOFFであり、それ以外の期間においてONである。
【0104】
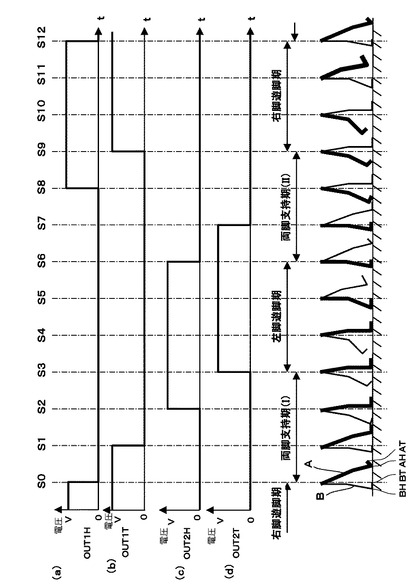
図13は、図5と同様の歩行が行われたときの出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図13(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。
【0105】
図13(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地している期間S0〜S8においてOFFであり、それ以外の期間においてONである。図13(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地している期間S1〜S9においてOFFであり、それ以外の期間においてONである。図13(c)において、出力端子OUT2Hからの出力は、左脚踵BHが接地している期間S6〜S12およびS0〜S2においてOFFであり、それ以外の期間においてONである。図13(d)において、出力端子OUT2Tからの出力は、左脚足尖BTが接地している期間S7〜S12およびS0〜S3においてOFFであり、それ以外の期間においてONである。
【0106】
図12(a)〜(d)および図13(a)〜(d)に示されるように、本実施例においても、出力端子部12からの電圧信号がONまたはOFFへ切り替えられるときの、電圧信号の立ち上がりおよび立ち下がりはすばやい。また、電圧信号がONまたはOFFへ切り替えられるタイミングは、それぞれの踵または足尖が接地または離地されるタイミングに略同時である。このように、本実施例では、右脚踵AH、右脚足尖AT、左脚踵BHおよび左脚足尖BTの、接地および離地のタイミングが、それぞれ精度よく検出され得る。
【0107】
本実施例に係る歩行信号生成装置1からの出力信号によって、両脚支持期、右脚遊脚期および左脚遊脚期は、以下のようにして、識別される。
【0108】
両脚支持期は、出力端子OUT1H、OUT1Tからの出力のうち少なくとも一つがOFFであり、且つ、出力端子OUT2H、OUT2Tからの出力のうち少なくとも一つがOFFである期間である。右脚遊脚期は、出力端子OUT1HおよびOUT1Tが同時にONである期間(T7〜T10、S9〜S12)である。左脚遊脚期は、出力端子OUT2HおよびOUT2Tが同時にONである期間(T2〜T5、S3〜S6)である。
【0109】
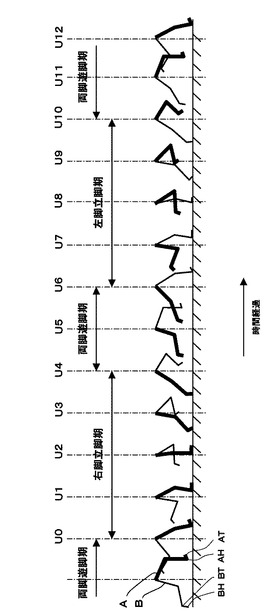
図14は、走行動作時に、走行者の片方の足が接地してから、再びその足が接地して同じ走行体勢に至るまでの、一連の動作を説明するための図である。図14において、横軸右方向が、時間経過の方向を表す。
【0110】
右脚Aの踵AHが接地する右脚踵接地の瞬間U0から、次の右脚踵接地の瞬間U12までの経過時間が、走行動作の一周期(以下、「走行一周期」という。)である。走行周期は、両足が遊脚する両脚遊脚期U4〜U6およびU10〜U12、右脚Aが立脚する右脚立脚期U0〜U4ならびに左脚Bが立脚する左脚立脚期U6〜U10とに大別される。歩行動作に比べ走行動作では、両脚支持期がなく、代わりに、両脚遊脚期がある。右脚立脚期および左脚立脚期は、それぞれ、左脚遊脚期および右脚遊脚期に相当する。
【0111】
本実施例の歩行信号生成装置1によれば、歩行周期の他、走行時における走行周期をも検出することが可能である。具体的には、走行周期における両脚遊脚期、右脚立脚期および左脚立脚期を識別できる。
【0112】
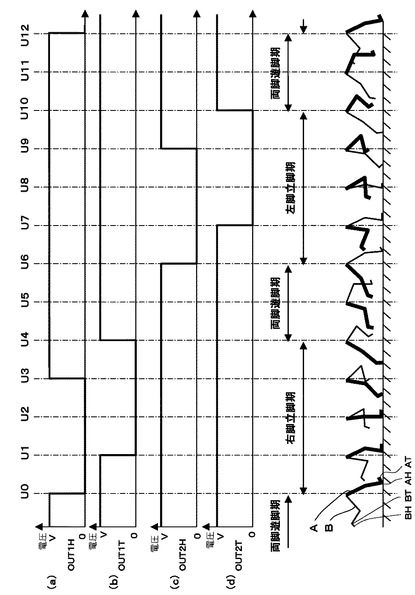
図15は、図14の走行動作が行われたときの出力端子部12からの出力の変化を示すタイミングチャートである。図15(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。図15の下側には、参照のために、図14と同様の走行動作が示されている。
【0113】
図15(a)において、右脚踵AHが接地している期間にのみ(U0〜U3)、出力端子OUT1Hからの出力がOFFとなる。図15(b)において、右脚足尖ATが接地している期間にのみ(U1〜U4)、出力端子OUT1Tからの出力がOFFとなる。図15(c)において、左脚踵BHが接地している期間にのみ(U6〜U9)、出力端子OU
T2Hからの出力がOFFとなる。図15(d)において、左脚足尖BTが接地している期間にのみ(U7〜U10)、出力端子OUT2Tからの出力がOFFとなる。
【0114】
右脚立脚期は、出力端子OUT1H、OUT1Tの出力の少なくとも一方がOFFの期間として識別され、左脚立脚期は、出力端子OUT2H、OUT2Tの出力の少なくとも一方がOFFの期間として識別される。また、両脚遊脚期は、出力端子OUT1H、OUT1T、OUT2H、OUT2Tの出力の全てがONの期間として識別される。
【0115】
以上、本実施例によれば、歩行時において、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの電圧信号が切り替えられる。このとき、電圧信号の立ち上がりおよび立ち下がりは、鋭い。このため、両脚支持期、左脚遊脚期および右脚遊脚期の識別が、精度よく行われ得る。
【0116】
さらに、走行時において、両脚遊脚期、右脚立脚期および左脚立脚期が切り替わる瞬間と略同時に、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの電圧信号が切り替えられる。このため、出力端子部12からの出力により、走行周期の両脚遊脚期、右脚立脚期および左脚立脚期を良好に識別できる。
【0117】
よって、本実施例によれば、歩行周期および走行周期を、良好に検出することができる。
【0118】
<応用例1>
上記実施例1〜3の歩行信号生成装置の応用例について説明する。応用例1では、上記実施例1〜3のうち実施例2の歩行信号生成装置1を備えた機能的電気刺激装置が示されている。
【0119】
機能的電気刺激装置は、病院等において、歩行動作の矯正やリハビリなどを目的として利用される。機能的電気刺激装置は、歩行信号生成装置からの検出信号に基づいて、所定のタイミングで、対象の筋肉へ電気刺激を供給する。機能的電気刺激装置は、電気刺激により筋肉の収縮を促すことにより、歩行動作を補助する。
【0120】
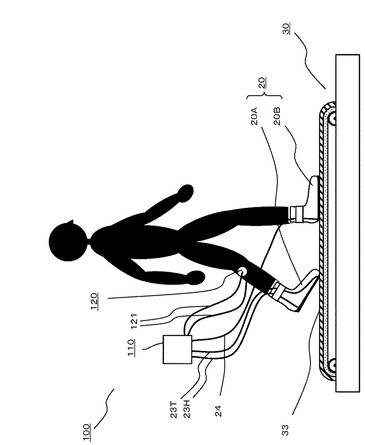
図16は、機能的電気刺激装置100の構成を説明する図である。
【0121】
機能的電気刺激装置100は、トレッドミル30、回路ボックス110、電気刺激電極120および配線121を有する。上記実施例2に係る歩行信号生成装置1の検出回路部10は、回路ボックス110内へ収容される。歩行信号生成装置1の装着部20は、歩行者の左右の脚へ装着される。
【0122】
回路ボックス110は、ベルト(図示せず)によって歩行者の腰に装着される。便宜上、図16では、回路ボックス110は、図16に示される歩行者から離れた位置に描かれている。歩行者が導電性シート33の上を歩行すると、回路ボックス110内の回路によって、歩行周期に応じた機能的電気刺激のための電気信号が生成され、生成された電気信号が、配線121を介して、電気刺激電極120へ出力される。
【0123】
電気刺激電極120は、円盤状を有し、皮膚に密着される側の面に、電極(図示せず)を有する。この電極は、配線121へ接続されている。電気刺激電極120は、対象の筋肉に適切に電気刺激を与えるために、歩行者の脚の所定の位置の皮膚に密着固定される。配線121は、回路ボックス110と電気刺激電極120とを接続する。回路ボックス110から電気刺激電極120に電気信号が供給されると、電気信号に応じた電気刺激が、
電気刺激電極120から対象の筋肉に供給される。
【0124】
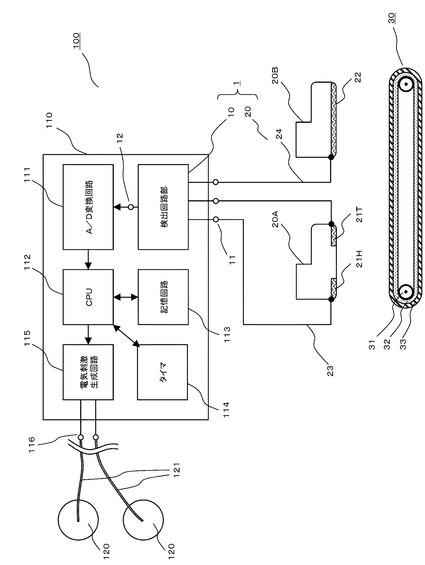
図17は、機能的電気刺激装置100の全体構成を示すブロック図である。回路ボックス110は、検出回路部10の他に、A/D変換回路111、CPU112、記憶回路113、タイマ114、電気刺激生成回路115を備える。
【0125】
A/D変換回路111は、検出回路部10の出力端子部12から出力される電圧信号をデジタル信号に変換してCPU112へ出力する。CPU112は、記憶回路113に記憶されている制御プログラムに従って機能的電気刺激装置100内の各部を制御する。
【0126】
記憶回路113は、CPU112を動作させるための制御プログラムを記憶する。また、記憶回路113は、CPU112が制御プログラムを実行する際の、ワーキングメモリとしても利用される。たとえば、過去の歩行周期に関するデータや電気信号を発生させるタイミングを決定するためのパラメータ等、各種データやパラメータが、記憶回路113に記憶される。
【0127】
タイマ114は、CPU112の制御のもと、時間の経過を計る。具体的には、タイマ114は、歩行信号生成装置1からの検出信号により検出される歩行一周期の長さ、左右の脚の立脚期および遊脚期の長さ、左右の脚の踵が接地してからの経過時間等を計る。また、タイマ114は、電気刺激生成回路115における電気信号の発生タイミングと終了タイミングを取得するため、CPU112により用いられる。
【0128】
電気刺激生成回路115は、CPU112から入力される制御信号に基づき、電気刺激電極120に電気信号を出力する。なお、図17の構成例では、出力端子部116として2つの端子が示されているが、使用目的に応じて2つ以上の電気刺激電極120が、適宜、出力端子部116へ接続可能なように、出力端子部116は、2つ以上の端子を有してもよい。
【0129】
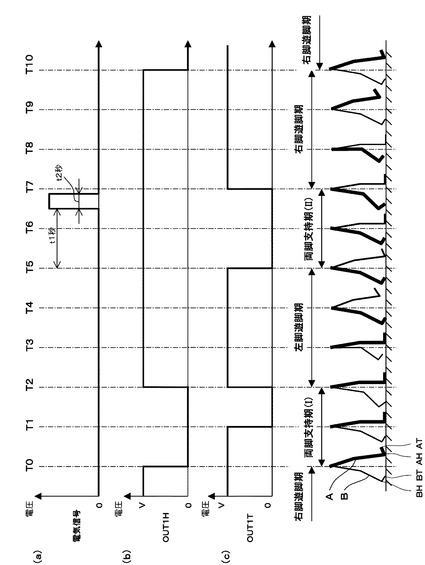
図18は、機能的電気刺激装置100の動作例を模式的に示す図である。この例では、歩行者の右脚Aの遊脚が機能的電気刺激装置100によりアシストされる。電気刺激電極120は、右脚Aを遊脚させるための位置に密着固定される。なお、機能的電気刺激装置100によるアシストの内容は、たとえば、回路ボックス110の外面に配さられたコントロールパネル(図示せず)等を使用して設定される。
【0130】
この動作例では、同図(b)、(c)に示す検出回路部10の出力端子OUT1H、OUT1Tからの検出信号に基づいて、同図(a)に示す電気信号が、電気刺激生成回路115から出力される。すなわち、右脚遊脚期に移行する直前のタイミングで、右脚Aの対象筋肉を刺激するための電気信号が、電気刺激生成回路115から出力される。これにより、右脚Aの遊脚がアシストされる。具体的には、CPU112により、以下の処理が行われる。
【0131】
歩行が開始されると、CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、両脚支持期(I)、(II)、左脚遊脚期および右脚遊脚期を検出し、さらに、このように検出された歩行周期に基づき、歩行一周期を検出する。かかる検出は、上記実施例2において説明した方法に従って行われる。
【0132】
次に、CPU112は、歩行一周期における両脚支持期(II)の開始タイミングと期間長に基づき、電気信号の発生タイミングt1と時間長t2を設定する。発生タイミングt1は、出力端子OUT1Tからの出力が、ONからOFFへ切り替わったタイミングからの経過時間として設定され、時間長t2は、発生タイミングt1からの時間長として設
定される。
【0133】
こうして、CPU112は、歩行一周期毎に、右脚遊脚期に移行する直前のタイミングで、電気信号を出力する。これにより、右脚の遊脚がアシストされ、歩行者の歩き方が矯正される。
【0134】
なお、発生タイミングt1と時間長t2は、当該歩行周期の一回前に取得された歩行周期(両脚支持期(I)、(II)左脚遊脚期および右脚遊脚期)に基づいて設定されても良く、あるいは、当該歩行周期の一回前から数回前までの間に取得された歩行周期を統計処理して設定されても良い。
【0135】
以上、本応用例1によれば、CPU112は、実施例2の歩行信号生成装置1からの検出信号にもとづいて、目的に応じた所望のタイミングで、対象の筋肉へ電気刺激を印加することができる。実施例2で説明された通り、歩行信号生成装置1からの検出信号の変化タイミングは、各歩行期間の開始終了タイミングに、精度良く一致する。このため、対象の筋肉へ印加される電気刺激の時間精度も良好となり、歩行動作の補助またはリハビリが効果的に行われ得る。
【0136】
<応用例2>
応用例2は、実施例2の歩行信号生成装置1を備えた歩行状態表示システムに関する。歩行状態表示システムは、歩行状態を画像で表示することにより、歩行状態を歩行者へ通知する。歩行状態表示システムは、病院等において、歩行動作の矯正やリハビリなどを目的として利用される。歩行信号生成装置1からの検出信号に基づいて、歩行状態に関する各種の情報が、リアルタイムで、液晶ディスプレイ等の画像表示装置に表示される。
【0137】
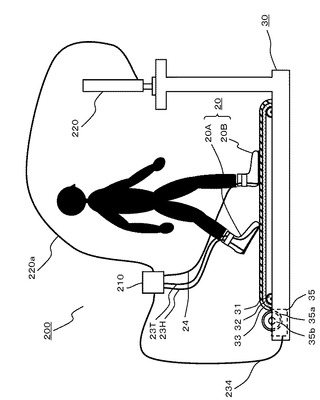
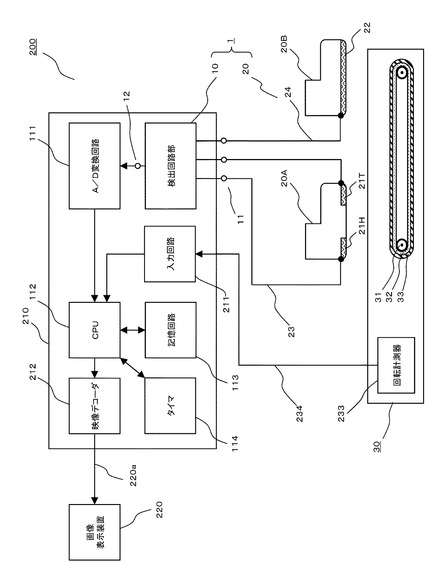
図19は、歩行状態表示システム200の構成を説明する図である。
【0138】
歩行状態表示システム200は、トレッドミル30、回路ボックス210および画像表示装置220を有する。なお、歩行信号生成装置1の検出回路部10は、回路ボックス210へ収容され、歩行信号生成装置1の装着部20は、歩行者の左右の脚へ装着される。
【0139】
トレッドミル30には、回転計測器35が配置されている。回転計測器35は、ローラ35aと、ローラ35aの回転軸35bとを備える。ローラ35aは、導電性シート33に押し付けられ、導電性シート33の移動に伴って回転する。回転軸35bには、回転軸35bの回転速度を検出するためのロータリーエンコーダが装着されている。ロータリーエンコーダからの出力が、ケーブル234を介して回路ボックス210に供給される。回路ボックス210は、ロータリーエンコーダからの出力に基づいて、導電性シート33の移動速度(歩行者の歩行速度)を算出する。
【0140】
なお、ローラ35aと回転軸35bを配さずに、軸31にロータリーエンコーダを装着しても良い。また、回転計測器35を配さずに、回路ボックス210の外面に配さられたコントロールパネル(図示せず)等を使用して、導電性シート33の移動速度(歩行者の歩行速度)を回路ボックス210に手入力するようにしても良い。
【0141】
回路ボックス210は、ベルト(図示せず)により歩行者の腰に装着される。便宜上、図19では、回路ボックス110は、図16に示される歩行者から離れた位置に描かれている。歩行者が、導電性シート33の上を歩行すると、回路ボックス210内の回路によって、歩行状態を歩行者へ通知するための画像に関する映像信号が生成され、生成された映像信号が、ケーブル220aを介して画像表示装置220に送信される。これにより、歩行者の歩行状態に関する情報が、画像表示装置220に表示れる。
【0142】
図20は、歩行状態表示システム200の全体構成を示すブロック図である。
【0143】
回路ボックス210は、図17の回路ボックス110に対し、電気刺激生成回路115が映像デコーダ212に置き換えられ、入力回路211がさらに加えられたものである。
【0144】
入力回路211は、回転計測器35からの移動速度を表す電気信号(ロータリーエンコーダからの出力)を受信する。入力回路211は、受信した電気信号を、CPU112が処理できる形式のデジタル信号へ変換し、CPU112へ出力する。CPU112は、入力回路211から入力されたデジタル信号に基づいて、導電性シート33の移動速度を算出する。
【0145】
本応用例において、記憶回路113は、歩行状態を表す画像を表示するための制御プログラムを記憶する。CPU112は、記憶回路113に記憶されている制御プログラムに従って各部を制御する。CPU112は、歩行状態を通知するための映像信号を生成し、映像デコーダ212へ出力する。
【0146】
映像デコーダ212は、CPU112からの映像信号を画像表示装置220で表示できるアナログまたはデジタルの映像信号に変換し、変換された映像信号をケーブル220aを介して、画像表示装置220へ出力する。画像表示装置220は、映像デコーダ212からの映像信号を受信し、映像信号が表す画像を、画像表示装置220の表示面に表示する。
【0147】
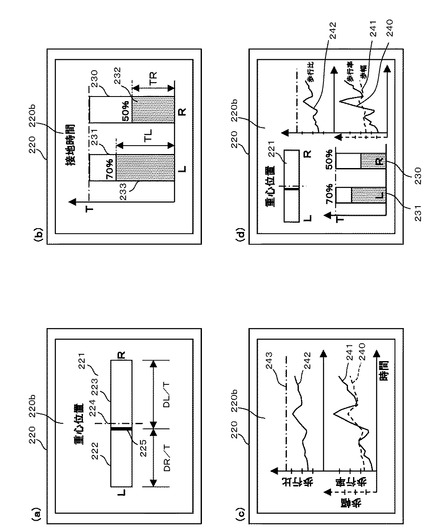
図21(a)〜(d)は、画像表示装置220の表示面220bに表示される画面の例を示す図である。
【0148】
図21(a)は、体の重心位置の偏りを表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0149】
歩行周期から算出される2つの比DR/T、DL/T(図1参照)の偏りは、重心位置の偏りを表す指標とみなされ得る。CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、2つの比DR/T、DL/Tを算出し、これら2つの値DR/T、DL/Tの偏りを、重心位置の偏りとして、画像表示装置220の表示面220bに表示させる。なお、DR>DLの場合は、体の重心位置が右に偏っているとみなされ、逆に、DL<DRの場合は、体の重心位置が左に偏っているとみなされる。
【0150】
図21(a)に示されるように、表示面220bには、横に延びるバー221が表示され、バー221の左右方向の中心位置には、中心線224がさらに表示される。バー221は、分割線225により、左右に2つのバー222、223に分割される。分割線225は、バー221の全長を、左右にそれぞれDR/T、DL/Tの割合で分割する位置に表示される。
【0151】
CPU112は、歩行動作中、随時、比DR/T、DL/Tを算出し、分割線225の位置を更新する。これにより、歩行者は、歩行動作中の各タイミングにおいて、重心位置の偏りを知ることができ、適宜、歩行動作を矯正することができる。
【0152】
図21(b)は、接地時間を表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0153】
CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、歩行一
周期Tを検出する。また、CPU112は、右脚接地時間TRおよび左脚接地時間TLを検出する(図1参照)。さらに、CPU112は、検出した歩行一周期Tと右脚接地時間TRおよび左脚接地時間TLとに基づいて、割合TR/TおよびTL/Tを算出し、算出した割合TR/TおよびTL/Tを、画像表示装置220の表示面220bに表示させる。
【0154】
図21(b)に示されるように、表示面220bには、横に並べられた、同じ高さの2本のバー230、231が表示される。バー230および231の上辺の位置に、横方向の一点鎖線が表示される。バー230および231の高さは、歩行一周期Tに対応する。各バー230、231には、バー232、233がさらに表示される。各バー232および233の高さは、それぞれ、歩行一周期に対する右脚接地時間TRおよび左脚接地時間TLの割合TR/TおよびTL/Tに対応する。さらに、これら割合TR/TおよびTL/Tを百分率で表す数字が、各バー232および233に付記される。
【0155】
CPU112は、歩行動作中、随時、割合TR/TおよびTL/Tを算出し、バー232、233の高さと、これらバー232、233に付記された数字を更新する。これにより、歩行者は、歩行動作中の各タイミングにおいて、左右の脚の接地時間や接地時間の偏りを知ることができ、適宜、歩行動作を矯正することができる。たとえば、図21(b)の場合、歩行者は、右脚の接地時間が現在よりも長くなるように、歩行動作を矯正する。
【0156】
図21(c)は、歩幅、歩行率および歩行比を表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0157】
CPU112は、入力回路211からのデジタル信号に基づいて算出した歩行速度Vと、A/D変換回路111から入力されるデジタル信号に基づいて検出された歩行一周期T(=2歩進むのに要する時間)から、V×T/2の演算を行い、算出した値V×T/2を歩幅として取得する。また、CPU112は、歩行率=60/Tを算出し、さらに、歩行比=歩幅/歩行率を算出する。
【0158】
図21(c)に示されるように、CPU112は、算出した歩幅、歩行率および歩行比を表す折れ線グラフを、表示面220bに表示する。グラフの横軸は、時間の経過を表す。図21(c)において、3本の折れ線240、241、242は、歩幅、歩行率および歩行比の遷移を、それぞれ表す。表示面220bには、さらに、歩行比の標準値を表す標準歩行比線243が表示される。
【0159】
CPU112は、歩行動作中、随時、歩幅、歩効率および歩行比を算出し、表示面220bに表示される画面を更新する。これにより、歩行者は、現在および過去の歩幅、歩行率および歩行比を、表示面220bに表示される折れ線240、241、242を通して知ることができ、適宜、歩行動作を矯正することができる。たとえば、図21(c)の場合、歩行者は、歩幅を大きくするように、または歩行率を小さくするよう、歩行動作を矯正する。
【0160】
なお、図21(a)〜(c)で説明された表示内容は、互いに複数組み合わされてもよい。たとえば、図21(d)に示されるように、図21(a)〜(c)の表示内容が組み合わされて、表示面220bに表示され得る。図21(d)において、表示面220bの左上の部分に、重心位置の偏りを表す画像が表示され、表示面の左下の部分に、左右の脚の接地時間を表す画像が表示される。また、表示面の右側に、歩幅、歩行率および歩行比の遷移を表す折れ線グラフの画像が表示される。
【0161】
本応用例に係る歩行状態表示システム200には、実施例2の歩行信号生成装置1が用
いられている。上述のように、出力端子OUT1HまたはOUT1Tからの電圧信号は、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、すばやく、ON(略0ボルト)またはOFF(略Vボルト)へ切り替えられる(図18(b)、(c)参照)。このため、CPU112は、両脚支持期、左脚遊脚期および右脚遊脚期を、時間精度よく識別でき、結果として、重心位置の偏り、左右の脚の接地時間、歩行率、歩行比等を精度よく算出できる。よって、歩行状態表示システム200は、時間精度のよい、歩行状態に関する情報を表示面220bに表示できる。歩行者は、時間精度の高い情報を表示面220bを通して視認しながら、歩行矯正やリハビリ等を、効果的に実行することができる。
【0162】
<その他>
以上、本発明に係る実施例およびその応用例について説明したが、本発明は、上記実施例および応用例に何ら制限されるものではない。また、本発明の実施例や応用例も、上記以外に、種々の変更が可能である。
【0163】
たとえば、上記実施例1〜3および応用例1〜2では、装着部20の足底部に、導電性布からなる電極が装着されたが、たとえば、導電性布のかわりに導電テープが、電極として、装着部20の靴下部(27、28)に張り付けられてもよい。あるいは、靴下部の足底部が、導電糸により製作され、この足底部が電極として用いられてもよい。これらの場合、検出回路部10と電極とを接続する配線は、導電性接着材等により、導電テープまたは導電糸により製作された靴下部の足底部に接着される。
【0164】
また、装着部20の電極(21、22、21H、22T、22H、22T)と、配線(23、24、23H、23T、24H、24T)とは、電気的に接続されればよく、両者の接続のために導電性接着剤が用いられなくてもよい。たとえば、導電テープを用いて、配線が電極へ張り付けられてもよい。または、半田等により、配線が電極に固定されてもよい。
【0165】
また、装着部20の電極および導電性シート33は、導電性を有していればよく、金属、合金、導電性樹脂、導電ゴム等、いかなる導電性素材を用いて製作されてもよい。なお、上記実施例1〜3および応用例1〜2で利用される導電性素材は、少なくとも導電性を持っていれば良いが、本発明は、この特性とともに他の特性をも導電性素材が持つことを排除するものではない。ただし、導電性素材は、なるべく抵抗値が小さい方が好ましく、上記実施例のような電極および導電性シート33を構成した場合に、検出回路部10側の抵抗器よりも顕著に抵抗値が小さくなるような素材とされる必要がある。
【0166】
また、上記実施例1〜3および応用例1〜2では、装着部20の左右の各装着部20A、20Bには、足底部に1つまたは2つの電極がそれぞれ配されたが、足底部に配された電極の形状および配置位置は、上記実施例1〜3および応用例1〜2で説明されたものに限られる必要はなく、目的に応じて適宜変更可能である。
【0167】
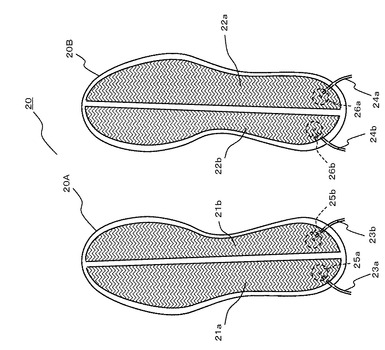
たとえば、図22のように、各装着部20A、20B足底部に、左右に分割された電極が2枚ずつ配される構成がとられてもよい。電極21a、21b、22a、22bには、左右それぞれの踵部の接着領域25a、25b、26a、26bにおいて、配線23a、23b、24a、24bが、それぞれ接続される。電極21a、21b、22a、22bは、それぞれ、踵部分から踵に沿って立ち上がるように湾曲し、また、足尖部分から足尖に沿って立ち上がるように湾曲している。
【0168】
この構成により、右脚が接地する間、常に、電極21a、21bが、ともに導電性シート33へ接触し、電極21aと21bとは、導電性シート33を介して電気的に接続され
る。同様に、左脚が接地する間、常に、電極22a、22bが、ともに導電性シート33へ接触し、電極22aと22bとは、導電性シート33を介して電気的に接続される。
【0169】
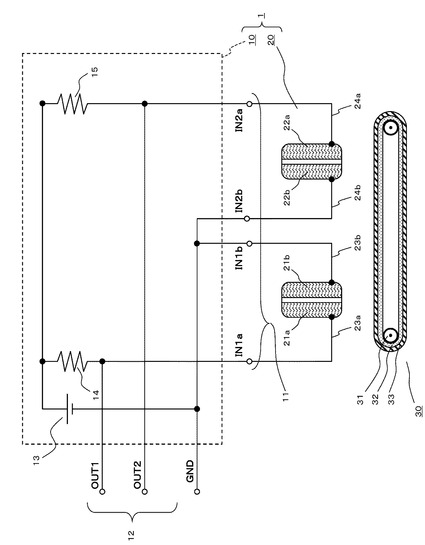
図22の構成の場合、図23の回路構成が取られ得る。電極21a、22aと電源13との間に、抵抗器14、15が、それぞれ直列に接続される。出力端子部12は、出力端子OUT1、OUT2からなる。図23の通り、出力端子OUT1は、抵抗器14と電極21a間へ接続される。出力端子OUT2は、抵抗器15と電極22a間へ接続される。電極21b、22bは、グランド端子GNDへ接続される。
【0170】
図24(a)、(b)は、それぞれ、図1の歩行動作がされたときの出力端子OUT1、OUT2からの出力の変化を示すタイミングチャートである。出力端子OUT1からの出力は、右脚遊脚期においてONであり、その他の期間においてOFFである。出力端子OUT2からの出力は、左脚遊脚期においてONであり、その他の期間においてOFFである。出力端子OUT1、OUT2からの出力が共にOFFである期間は、両脚支持期である。
【0171】
また、図25のように、左右の足底部に、それぞれ4つずつの電極が配されてもよい。この場合、図26のように、踵の2つの電極と、足尖の2つの電極に、それぞれ、図23と同様の抵抗器14H、14T、15H、15Tと、出力端子OUT1〜OUT4と、入力端子IN1a〜IN1d、IN2a〜IN2dとからなる回路が適用される。各出力端子からの出力により、各脚の踵の接地期間と足尖の接地期間を個別に検出することができる。
【0172】
また、上記実施例1〜3および応用例1〜2では、出力端子部12の電位とグランド電位との間の電位差が検出信号として用いられたが、他の方法によって検出信号が取得されても良い。たとえば、図4の回路構成において、図27のように、出力端子OUT1´と出力端子OUT1との間の電位差が検出信号とされてもよい。この場合、出力端子OUT1、OUT1´の間の電位差は、両脚支持期においてON(略Vボルト)であり、遊脚期においてOFF(略0ボルト)である。他の実施例2、3においても、同様の変更が可能である。検出信号は、抵抗器に電流が流れることにより生じる電圧降下によって変化するものであれば良い。
【0173】
また、上記実施例1〜3および応用例1〜2では、抵抗器は、電源13と足底部に配された電極との間に、接続されたが、たとえば図28のように、電極と、グランド端子GNDとの間に接続されてもよい。図28の回路構成は、図4の回路構成に対し、抵抗器14が、電源13と電極21との間から、グランド端子GNDと電極22との間へ移動され、出力端子OUT1が、移動された抵抗器14と電極22との間へ接続されたものである。この回路構成によると、出力端子OUT1からの出力(グランド端子GNDに対する電位差)は、両脚支持期においてON(略Vボルト)であり、遊脚期においてOFF(略0ボルト)である。出力端子の接続位置は、抵抗器の位置変更に応じて適宜変更可能である。
【0174】
また、上記実施例1〜3および応用例1〜2では、出力端子部12の一つの出力端子から出力される電圧は、ON(Vボルト)およびOFF(0ボルト)の2値をとった。しかしながら、一つの出力端子から出力される電圧が、3値以上の出力をとってもよい。
【0175】
この場合、たとえば、図10の回路は、図29の回路に変更され得る。図29の回路構成では、図10の回路構成に対し、抵抗器の数と位置および出力端子の数と位置が変更されている。
【0176】
図29において、抵抗器14Hおよび15Hは、グランド端子GNDと電極21Hおよ
び22Hの間に、それぞれ配される。さらに、電源13の正極側に、抵抗器16が、さらに接続される。出力端子部12は、2つの出力端子OUT1およびOUT2からなり、図29に示されるように、抵抗器16の両端へ接続される。出力端子OUT1は、抵抗器16と電源13との間に接続される。出力端子OUT2は、抵抗器16と抵抗器14Tおよび15Tとの間に接続される。
【0177】
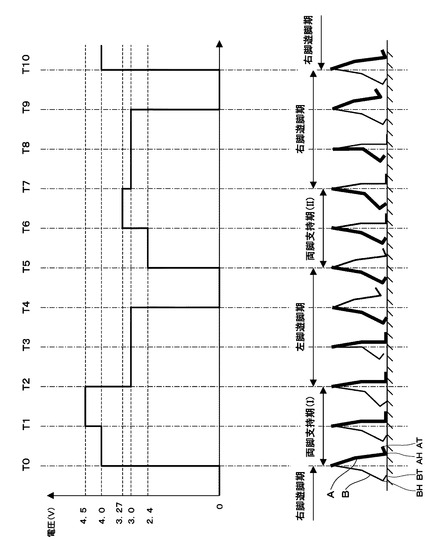
図30は、図1の歩行動作がなされたときの、図29の出力端子12からの出力の変化を模式的に示すタイミングチャートである。図30には、出力端子OUT1とOUT2の電位差が検出信号として示されている。なお、図30では、例として、電源13の電圧は12ボルトとされ、抵抗器14H、14T、15H、15T、16の抵抗値は、それぞれ、1kΩ、2kΩ、2kΩ、1kΩ、1kΩとされる。
【0178】
この場合、両脚支持期は、検出信号がゼロから立ち上がったタイミングから最初に立ち下がるまでの期間として識別される。また、各期間の波形の高さによって、その両脚支持期が両脚支持期(I)および両脚支持期(II)の何れであるかが識別される。たとえば、両脚支持期(I)と両脚支持期(II)は、出力が0ボルトである状態(T4〜T5、T9〜T10)から立ち上がった直後の電圧が3.2ボルトを超えたか否かにより識別される。検出信号が3値以上をとる場合の回路構成は、図29の以外にも、適宜、設計され得る。
【0179】
また、上記実施例1〜3および応用例1〜2では、ソックス状の装着部20が用いられたが、装着部20が歩行者の脚に装着されたときに足底部に導電性の電極が配置されればよく、たとえば、靴状の装着部が用いられても良い。靴状の装着部20が用いられる場合においても、電極は、導電性を有していればよく、導電ゴム等、いかなる導電性の素材からも製作されてよい。また、装着部20は、靴下状、靴状の装着部の他、スリッパ状、草履状、長靴状等、いかなる形状へも変更可能である。また、足底部の電極は、歩行者の足底部へ直接配されてもよい。
【0180】
上記実施例1〜3および応用例1〜2では、導電性を有する床面として、トレッドミル30に配された導電性シート33が用いられたが、歩行者が歩行する床面は、導電性を有していればよく、導電性シート33に限られる必要はない。たとえば、トレッドミル30の帯状床面32が導電ゴムで製作され、導電性シート33のかわりに帯状床面32が利用されてよい。また、トレッドミル30以外の、可動性を有する床面が、歩行動作の検出のために用いられてもよい。
【0181】
また、歩行者が歩行する床面は、可動でなくてもよく、たとえば、室内の床や廊下、地面等に導電性シートが敷かれ、その上を、足に装着部20を装着した歩行者が歩行するような形態であっても良い。このように導電性シートが床面に敷かれる場合、導電性シートと床面とは適切に電気的に絶縁されることが好ましい。実施例3の場合には、このように床面に敷かれた導電性シートは、適宜、グランド接続が行われる。
【0182】
また、室内の床や廊下の一部が、予め、金属、合金、導電性樹脂、導電ゴム等、導電性を有する素材により構成されていても良い。この場合、導電性の素材は、網目状に床面に配置されても良い。また、導電性の床面は、必ずしも平坦である必要はなく、目的に応じて、湾曲、段差等があってもよい。
【0183】
上記実施例1〜3および応用例1〜2では、電源13が検出回路部10へ配されたが、電源13は、検出回路部10へ配されなくともよく、検出回路部10に外部から電源を入力するための端子が、設けられてもよい。また、電極へ印加される電圧は、直流に限らず交流であってもよい。この場合、検出回路部10の出力端子部12からは、所定の振幅の
交流電圧が出力される。出力される交流電圧の振幅により、歩行の歩行周期が識別できる。
【0184】
また、上記応用例2では、画像表示装置220に表示される画像が、回路ボックス210で生成され、また、歩行周期の検出や、重心位置の偏り、左右の脚の接地時間、歩行率、歩行比等の変数もまた、回路ボックス210内のCPU112が算出したが、これらの処理の一部または全てが、回路ボックス210の外部で実行されてもよい。また、画像表示装置220は、トレッドミル30上の歩行者から離れた位置にあっても良く、たとえば、歩行者の歩行を矯正する指導員が所持する携帯端末等に、歩行者の歩行状況に関する情報が表示されても良い。さらに、信号の通信は、有線の他、無線により行われてもよい。
【0185】
また、上記実施例3では、導電性シート33のグランド接続の手段として、端子34が用いられたが、導電性シート33を接地するための手段は、これに限られるものではない。たとえば、導電性シート33に接触して回転する導電性のローラを配置し、このローラを介して、導電性シート33を接地しても良い。
【0186】
また、歩行信号生成装置の回路構成は、実施例1〜3および応用例1〜2で説明された回路構成に限られる必要はない。たとえば、抵抗器は、電極に電流が流れると当該電流により電圧降下を起こすように配置されていれば良い。また、歩行信号生成装置の応用例も、上記応用例1、2に限られない。たとえば、歩行信号生成装置からの検出信号に基づき、歩行周期に関する情報を記録、分析または表示するようなシステムにも、本発明の歩行信号生成装置を適用可能である。また、美しい歩行動作を身につけるための歩行訓練のために、本発明の歩行信号生成装置が使用されてよい。
【0187】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0188】
1 … 歩行信号生成装置
21、22、21H、21T、22H、22T、21a、21b、21c、21d、22a、22b、22c、22d … 電極
33 … 導電性シート(床面)
14、15、14H、14T、15H、15T、16 … 抵抗器(電気抵抗部)
OUT1、OUT1´、OUT2、OUT1H、OUT1T、OUT2H、OUT2T
… 出力端子(出力部)
13 … 電源(電位印加部)
【技術分野】
【0001】
本発明は、歩行者の歩行に応じた信号を生成する歩行信号生成装置および歩行信号生成システムに関し、特に、歩行者の歩行周期や歩行状態を検出する際に用いて好適なものである。
【背景技術】
【0002】
従来、歩行動作の矯正や、リハビリ等を目的として、歩行者の歩行状態に応じた信号を生成するための装置が提案されている。
【0003】
この種の装置として、たとえば、足底部に圧力センサが設けられた装置が提案されている(特許文献1参照)。圧力センサは、足底部と床面との間に形成される圧力に応じたアナログ電圧を出力する。圧力センサからの電圧信号を継続的に計測することにより、脚の接地、離地等のタイミングを計測できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−192744号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
歩行状態を検出する場合、脚の接地および離地のタイミングを精度よく検出できることが好ましい。しかしながら、上記圧力センサでは、接地および離地の瞬間の前後において、圧力が緩やかに変化するため、出力される電圧信号も緩やかに変化する。このため、圧力センサを用いた場合には、脚の接地および離地の瞬間を、精度よく検出することが難しい。
【0006】
本発明は、このような課題に鑑みてなされたものであり、歩行者の脚が接地および離地するタイミングに精度よく同期して変化する信号を生成可能な歩行信号生成装置および歩行信号生成システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、歩行信号生成装置に関する。本態様に係る歩行信号生成装置は、足の底部に配される電極と、前記電極に電位を印加する電位印加部と、前記電極に電流が流れると当該電流により電圧降下を起こす電気抵抗部と、前記電圧降下により変化する検出信号を出力する出力部とを備える。
【0008】
本態様に係る歩行信号生成装置によれば、歩行時に、電極が導電性の床面に接触して電極に電流が流れると、この電流が電気抵抗部に流れ、電気抵抗部において電圧降下が生じ、出力部から出力される検出信号が変化する。このため、検出信号は、電極が床面に接触すると直ちに変化する。また、検出信号は、電気抵抗の電圧降下に応じて変化するため、変化の際の立ち上がりおよび立ち下がりが急峻となる。よって、歩行により足底が床面に接地および離地するタイミングに精度良く同期した検出信号が出力され、この検出信号により歩行者の足の接地および離地を精度よく検出することが可能となる。
【0009】
本態様に係る歩行信号生成装置において、前記出力部は、前記電気抵抗部の両端のうち一端に接続された出力端子を有するよう構成され得る。こうすると、検出信号に電気抵抗部の電圧降下を直接的に反映させることができる。
【0010】
なお、本態様に係る歩行信号生成装置において、前記電気抵抗部は、たとえば、前記電位印加部と前記電極に対して直列に接続されるよう配置され得る。この場合、電気抵抗部は、たとえば、前記電位印加部と前記電極の間に配置される。
【0011】
本態様に係る歩行信号生成装置は、一方の足の底部に、前記電極が配され、他方の足の底部に、他の電極が配され、前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成されるよう構成され得る。こうすると、歩行時に、一方の足と他方の足の両方が導電性の床面に接地したタイミングで、出力部からの検出信号が変化し、さらに、この状態から何れか一方の足が床面から離地したタイミングで、出力部からの検出信号が変化する。よって、かかる検出信号に基づいて、歩行動作時に、両脚が接地している期間(両脚支持期)と、片足が遊脚している期間(遊脚期)を良好に判別することが可能となる。
【0012】
この場合、前記電極、前記抵抗部および前記出力部からなる回路部が、前記一方の足の踵部分と足尖部分について、それぞれ配備されるよう構成され得る。こうすると、一方の足の踵と足尖が接地および離地タイミングで検出信号が変化するため、かかる検出信号に基づいて、たとえば、遊脚期に、どちらの足が遊脚状態にあるかを判別することができる。
【0013】
本態様に係る歩行信号生成装置では、前記電極、前記抵抗部および前記出力部からなる回路部が、前記足の踵部分と足尖部分について、それぞれ配備され得る。こうすると、踵部分が接地および離地したタイミングで変化する検出信号と、足尖部分が接地および離地したタイミングで変化する検出信号を、それぞれ取得することができる。
【0014】
本態様に係る歩行信号生成装置は、前記足の底部を足幅方向に分割した一方の領域に前記電極が配され、他方の領域に他の電極が配され、前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成されるように構成され得る。こうすると、当該足が接地および離地するタイミングで変化する検出信号を得ることができる。
【0015】
この場合、前記一方の領域と前記他方の領域は、前記足の底部の踵部分を足幅方向に分割した領域とされ得る。こうすると、当該足の踵部分が接地および離地するタイミングで変化する検出信号を得ることができる。
【0016】
あるいは、前記一方の領域と前記他方の領域は、前記足の底部の足尖部分を足幅方向に分割した領域とされ得る。こうすると、当該足の足尖部分が接地および離地するタイミングで変化する検出信号を得ることができる。
【0017】
本発明の第2の態様は、歩行信号生成システムに関する。本態様に係る歩行信号生成システムは、上記第1の態様に係る歩行信号生成装置と、導電性を有する床面と、を有する。本態様に係る歩行信号生成システムによれば、上記第1の態様に係る歩行信号生成装置と同様の効果が奏され得る。
【発明の効果】
【0018】
本発明によれば、歩行者の脚が接地および離地するタイミングに精度よく同期して変化する信号を生成可能な歩行信号生成装置および歩行信号生成システムを提供することができる。
【0019】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。
ただし、以下の実施の形態は、あくまでも、本発明を実施する際の一つの例示であって、本発明は、以下の実施の形態によって何ら制限されるものではない。
【図面の簡単な説明】
【0020】
【図1】歩行時の歩行の動作と歩行周期の関係を説明する図である。
【図2】実施例1に係る歩行信号生成装置の回路構成を示す図である。
【図3】実施例1に係る装着部の外観を示す図である。
【図4】実施例1に係る歩行信号生成装置の出力端子部からの出力の変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図5】実施例1に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図6】実施例2に係る歩行信号生成装置の回路構成を示す図である。
【図7】実施例2に係る装着部の外観を示す図である。
【図8】実施例2に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図9】実施例2に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図10】実施例3に係る歩行信号生成装置の回路構成を示す図である。
【図11】実施例3に係る装着部の外観を示す図である。
【図12】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図13】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と歩行動作との関係を模式的に示すタイミングチャートである。
【図14】走行時の走行の動作と走行周期の関係を説明するための図である。
【図15】実施例3に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示すタイミングチャートである。
【図16】応用例1に係る機能的電気刺激装置の構成を模式的に示す図である。
【図17】応用例1に係る機能的電気刺激装置の構成を示すブロック図である。
【図18】応用例1に係る機能的電気刺激装置の動作を模式的に示すタイミングチャートである。
【図19】応用例2に係る歩行状態表示システムの構成を模式的に示す図である。
【図20】応用例2に係る歩行状態表示システムの構成を示すブロック図である。
【図21】応用例2に係る画像表示装置の表示面に表示画面の例を示す図である。
【図22】その他の構成に係る装着部の外観を示す図である。
【図23】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図24】その他の構成に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示すタイミングチャートである。
【図25】その他の構成に係る装着部の外観を示す図である。
【図26】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図27】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図28】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図29】その他の構成に係る歩行信号生成装置の回路構成を示す図である。
【図30】その他の構成に係る歩行信号生成装置の出力端子部からの出力変化と走行動作との関係を模式的に示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態に係る歩行信号生成装置について説明する。本実施の形態に係る歩行信号生成装置は、たとえば、歩行周期を検出するために用いられ得る。以下、歩行周期に関する基本的事項、実施例にかかる歩行信号生成装置、および、歩行信号生成装置の応用例について、図面を参照して、順に説明する。
【0022】
<歩行周期>
図1は、歩行者の右脚Aが接地してから、再び右脚Aが接地して同じ歩行体勢に至るまでの一連の動作と歩行周期の関係を説明するための図である。図1の最下段には歩行者の脚の動きが示されている。図1において、横軸右方向は、時間経過の方向を表す。右脚Aの踵AHが接地する右脚踵接地の瞬間T0から、次の右脚踵接地の瞬間T10までの経過時間T(秒)が、歩行動作の一周期(以下、「歩行一周期」という。)である。
【0023】
歩行一周期(T)は、両足で体を支持する両脚支持期T0〜T2およびT5〜T7、左脚Bが遊脚する左脚遊脚期T2〜T5ならびに右脚Aが遊脚する右脚遊脚期T7〜T10に大別される。
【0024】
図1の歩行例では、踵、足尖の順で接地し、踵、足尖の順で離地する。踵が接地したタイミングで両脚支持期が始まり、足尖が離地したタイミングで遊脚期が始まる。
【0025】
歩行周期の分析では、歩行一周期(T)の他、たとえば、右および左の脚が接地してから、その反対脚が接地するまでの時間(DR、DL)、右および左の脚が接地し続ける時間(右脚接地時間TR、左脚接地時間TL)などが検出される(何れも単位は秒)。この他、歩行率(60/T)等の算出が可能である。歩行率の単位はstep/分である。
【0026】
歩行速度(メートル/秒)が計測可能な場合(応用例2参照)、上記変数に加え、歩幅=歩行速度×T/2(メートル)、歩行比=歩幅/歩行率(メートル・分/step)などが、さらに算出可能である。
【0027】
このように、歩行に関する周期や時間が検出されると、歩行状態を表す各種の変数が抽出され、これらが、歩行者の歩行動作の矯正やリハビリのために利用される。
【0028】
<実施例1>
図2は、実施例1にかかる歩行信号生成装置1の回路構成を示す図である。歩行信号生成装置1は、検出回路部10および装着部20を有する。なお、歩行信号生成装置1とトレッドミル30とで構成されるシステムが、請求項に記載の歩行信号生成システムに対応する。
【0029】
なお、装着部20は、後述のように、それぞれ裏面に電極が設置された一組のソックスからなる。装着部20が歩行者の両脚へ装着された状態において歩行がなされると、歩行信号生成装置1から検出信号が出力される。本実施例では、歩行者は、トレッドミル30の上を歩行する。
【0030】
検出回路部10は、グランド端子GND、入力端子部11、出力端子部12、電源13および抵抗器14を有する。グランド端子GNDには、グランド電位が印加される。入力端子部11は、入力端子IN1および入力端子IN2からなる。出力端子部12は、出力端子OUT1からなる。
【0031】
電源13は、所定の電圧(たとえば数ボルト。以下、Vボルトとする。)の直流電圧を発生させる。電源13の負極は、グランド端子GNDに接続される。電源13の正極は、抵抗器14の一端に接続される。抵抗器14の他端は、入力端子IN1に接続される。入力端子IN2は、グランド端子GNDに接続される。出力端子OUT1は、入力端子IN1と抵抗器14との間に接続される。
【0032】
装着部20は、右脚Aに装着される右側装着部20Aと、左脚Bに装着される左側装着
部20Bとからなる。また、各装着部20A、20Bの足底部には、電極21、22が、それぞれ配されている(図3参照)。電極21と入力端子IN1とが、配線23により接続され、電極22と入力端子IN2とが、配線24により接続される。
【0033】
図3(a)および図3(b)は、装着部20の外観を示す図である。図3(a)は、各装着部20A、20Bの足底部を下側からみた図である。図3(b)は、右側装着部20Aを右側(図3(a)の矢印方向参照)から見た図である。
【0034】
右側装着部20Aは、電極21と靴下部27を有する。電極21は、右足の足底に似た形状の導電性布からなる。導電性布は、導電糸により形成される繊維である。導電糸は、たとえば、導電性を有するように、アルミや銅などの金属や合金等によりめっき処理が施された糸である。導電性糸は、導電性を有していればよく、めっき処理に限らず、いかなる方法により導電性が実現されていてもよい。
【0035】
電極21上面の踵部に配される接着領域25において、配線23が、導電性接着剤により、電極21に接着される。なお、図2に示す抵抗器14の抵抗値は、導電性布からなる電極21に比べて十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0036】
靴下部27は、導電性を有しない布性素材からなり、右脚用の靴下と略同様の形状を有する。なお、靴下部27の足底部には、電極21との絶縁状態が良好に保たれるよう、絶縁層(図示せず)が配されてもよい。
【0037】
上記のように配線23が電極21に接着された状態において、電極21の上面が、靴下部27の足底部に装着される。このとき、接着領域25の近傍において、配線23の一部は、図3の通り、靴下部27の足底部分と、電極21との間に挟まれた状態となる。
【0038】
接着領域25から伸びる配線23は、伸縮するバンド29によって、右脚Aに固定される。これにより、歩行時に、配線23が大きく振れることが抑制され得る。
【0039】
左側装着部20Bは、右側装着部20Aの構成と同様である。左側装着部20Bは、電極22、靴下部28およびバンド(図示せず)を有する。配線24が、電極22上面側の接着領域26において、電極22に接着され、電極22の上面が靴下部28の足底部に装着される。配線24は、バンドによって、左脚Bに固定される。
【0040】
なお、図3(b)に示されるように、右脚用の電極21は、踵部分から踵に沿って立ち上がるように湾曲し、また、足尖部分から足尖に沿って立ち上がるように湾曲している。これにより、歩行時において、右脚踵AHが接地すると同時に電極21が床面に接触し、また、右脚足尖ATが離地する最後の瞬間まで、電極21が床面に接触し続ける。この構成および作用は、左脚用の電極22も同様である。
【0041】
図2にもどり、トレッドミル30は、2つの軸31と、帯状床面32と、導電性シート33を有する。なお、図2では、便宜上、これら以外のトレッドミル30の構成は図示されていない。
【0042】
帯状床面32は、環帯状を有し、2つの軸31に巻きつけられている。導電性シート33は、導電性布からなり、帯状床面32と略同様の環帯状を有する。導電性シート33の内側の面は、帯状床面32の外側の面に装着され、帯状床面32と導電性シート33は一体化される。なお、帯状床面32は、導電性シート33と他の部材とを電気的に絶縁する構造を有する。たとえば、帯状床面32は、絶縁性を有するゴムシートからなる。
【0043】
なお、本実施例では、導電性シート33は、接地(以下、「グランド接続」と言う。)されていない。
【0044】
トレッドミル30が稼働されると、2つの軸31が、所定の回転速度で、同一方向へ回転される(矢印の回転方向参照)。軸31の回転に応じて、一体化された帯状床面32および導電性シート33が、2つの軸31の周りで回転される。これにより、導電性シート33が、所定の速度で水平方向へ移動する(白い矢印の方向参照)。こうして、歩行者は、移動される導電性シート33の上面を、歩行可能となる。
【0045】
装着部20が歩行者の脚に装着された状態で、導電性シート33上で歩行がなされると、各装着部20A、20Bの底面が接地および離地する。歩行により、2つの電極21、22の何れか一方が導電性シート33から離れていると、出力端子OUT1には、電源13の電位Vが現れる(以下、「ON」という)。また、2つの電極21、22の両方が導電性シート33に接触すると、これら電極21、22が導電性シート33を介して電気的に接続され、抵抗器14と電極21、22に電流が流れる。この電流により抵抗器14において電圧降下が生じ、出力端子OUT1の電位が立ち下がる(以下、「OFF」という)。抵抗器14の抵抗値は、電極21、22と導電性シート33の抵抗値に比べて十分に大きく設定されている。このため、OFFの出力値は略ゼロになる。
【0046】
本実施例に係る歩行信号生成装置1が出力する電圧信号は、以下に説明するように、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられるのと略同時に、すばやくONまたはOFFに切り替えられる。
【0047】
図4は、歩行動作と出力端子部12からの出力(出力端子OUT1の電位)との関係を模式的に示すタイミングチャートである。図4の下半分には、参照のために、図1と同様の歩行の動作が示されている。
【0048】
図示のとおり、出力端子OUT1からの出力は、両脚支持期であるT0〜T2およびT5〜T7においてOFFであり、それ以外の期間においてONである。出力端子OUT1からの出力がONの期間は、遊脚期である。
【0049】
本実施例では、電極21、22が入力端子IN1、IN2を接続、開放するためのスイッチの役割を果たす。すなわち、電極21、22の両方が導電性シート33に接触すると、電極21、22と導電性シート33とによって入力端子IN1、IN2が接続される。このように、本実施例では、電極21、22が電気接続のためのスイッチの役割を果たすため、出力端子OUT1からの電圧信号が変化する瞬間は、脚が接地または離地されるタイミングに略同期し、且つ、図4の出力波形は、立ち上がりおよび立ち下がりが鋭い。
【0050】
たとえば、右脚踵接地の瞬間(T0)において、右脚Aが接地し、電極21は導電性シート33に接する。なお、このとき左脚Bは接地されたままである。したがって、出力端子OUT1は、グランド端子GNDに短絡される。よって、右脚踵接地の瞬間(T0)において、出力端子OUT1からの出力は、略瞬時に、図4のグラフに示されるように(T0)、ONからOFFへ変化する。
【0051】
なお、厳密には、電極21と導電性シート33との間の電気抵抗は、電極21と導電性シート33とが接触する領域の面積に依存して変化する。しかしながら、電極21および導電性シート33の間に形成される電気抵抗は、抵抗器14の電気抵抗に比較して十分小さい。このため、電極21および導電性シート33の接触面積の変化は、出力端子OUT1からの電圧信号に影響をほとんど与えない。よって、電極21と導電性シート33とが接触した瞬間に、出力端子OUT1における電位が、略瞬時に、略Vボルトから略0ボル
トへ変化する。このため、図4に示されるように、右脚踵接地の瞬間(T0)に略同時に、電圧信号がONからOFFへ、すばやく切り替わる。
【0052】
出力端子OUT1からの電圧信号が、OFFからONへ切り換えられる場合においても、電圧信号は、脚の足尖部が離地されるのと略同時に、すばやく変化する。
【0053】
たとえば、左脚足尖離地の瞬間(T2)において、左脚Bが離地し、同時に、電極22が導電性シート33から離れる。これによって、抵抗器14に電流が流れなくなり、抵抗器14における電圧降下が0になる。したがって、左脚足尖離地の瞬間(T2)に、出力端子OUT1からの出力は、図4に示されるように、OFFからONへ変化する。
【0054】
同様に、左脚踵接地(T5)、右脚足尖離地(T7)および右脚踵接地(T10)の瞬間においても、出力端子OUT1からの電圧信号が、ONまたはOFFへ、すばやく切り替わる。
【0055】
このように出力端子OUT1からの出力がすばやく切り換わることは、歩行者の歩行動作が変わっても同じである。以下に説明されるように、歩行者が図1とは別の歩き方で歩行をした場合においても、電圧信号が、脚の接地および離地のタイミングで、ONまたはOFFへ、すばやく切り替わる。
【0056】
図5は、図1とは異なる歩行動作が行われたときの出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図5の下側には、図1とは異なる歩行の動作の例が示されている。
【0057】
図5に示される歩行動作は、図1の場合よりも遅く歩いた場合のものである。図1では、左脚踵BHが接地する瞬間(T5)よりも前に、右脚踵AHが離地する(T4)。これに対し、図5では、左脚踵BHが接地する瞬間(S6)から左脚足の底が接地する瞬間(S7)までの間、右脚踵AHは離地せず、それから所定時間の後に、右脚踵AHが離地される(S8)。図5において、両脚支持期は、S0〜S3およびS6〜S9である。左脚遊脚期は、S3〜S6である。右脚遊脚期はS9〜S12である。
【0058】
図5に示される歩行がなされた場合においても、出力端子OUT1からの出力は、両脚支持期S0〜S2およびS5〜S7においてOFFであり、それ以外の遊脚期においてONである。
【0059】
図5の場合においても、図4の場合と同様に、両脚支持期、右脚遊脚期および左脚遊脚期が切り替えられるのと略同時に、出力端子OUT1からの電圧信号の変化は、すばやくONまたはOFFへ切り換えられる。
【0060】
以上、本実施例によると、歩行時において、電極21、22が共に導電性シート33に接触するのと略同時に、出力端子OUT1から出力される電圧が、ON(略Vボルト)からOFF(略0ボルト)へ、略瞬間的に、すばやく切り替わる。また、電極21または電極22が導電性シート33に接触されなくなるのと略同時に、出力端子OUT1から出力される電圧は、OFFからONへ、略瞬間的に、すばやく切り替わる。このため、出力端子OUT1から出力される電圧により、歩行周期の両脚支持期および遊脚期を、容易かつ適正に、識別することができる。
【0061】
足底部に配された圧力センサが利用される場合(特許文献1参照)、圧力センサから出力されるアナログ電圧が所定の閾値を超えるか否かによって、当該圧力センサが配された位置に圧力がかかっているか否かが判定され得る。しかしながら、圧力センサから出力さ
れるアナログ電圧信号は、圧力に応じてなだらかに変化するため、上記判定では、閾値の大きさに依存して、検出されるタイミングが前後に変化し得る。これに対し、本実施例によると、出力端子OUT1の電圧信号は、ONまたはOFFへ、略瞬時に変化する。よって、閾値がどのように設定されても、現在の歩行状態が両脚支持期であるか否かの判定が適正に行われ得る。本実施例において、閾値は、たとえば、V/2ボルトに設定される。
【0062】
なお、圧力センサが用いられる場合(特許文献1参照)、歩行動作の検出出力は、立脚(支持)と遊脚の動作が繰り返されることによるヒステリシス特性、クリープ特性等の影響を受け得る。これに対し、本実施例では、検出出力(電圧信号)の生成のために、抵抗器14と電極21、22および導電性シート33が用いられるため、出力端子OUT1からの検出出力に対し、ヒステリシス特性およびクリープ特性の影響が及ぶことがない。
【0063】
また、本実施例によれば、歩行信号生成装置1は、圧力センサ等の特殊な電気または電子的素子を必要としない。よって、歩行信号生成装置1は、シンプルな回路構成を有しながらも、歩行周期の精密な検出が可能な検出出力を生成できる。
【0064】
また、本実施例では、トレッドミル30の帯状床面32の上面に、導電性シート33が配され、その上面が歩行面とされる。本実施例において、歩行者が歩行する歩行面は導電性を有していればよく、歩行面に特別な電子回路の構造を配さなくても良い。このため、歩行信号生成装置1が使用できる環境は限定されにくく、歩行信号生成装置1の利便性が向上する。
【0065】
さらに、本実施例では、電極21、22は導電性布からなるため柔軟であり、電極21、22は歩行時の足底部の変形に応じて変形する。よって、歩行信号生成装置1は、電極21、22等によって歩行者の自然な歩行動作を妨げられることなく、歩行者の自然な歩行動作に基づく適切な歩行信号を出力し得る。
【0066】
なお、歩行信号生成のために小型の圧力センサを用いる場合、圧力センサの足底部への張り付け位置の調節が困難である。これに対し、本実施例の構成によれば、電極21、22は、導電性布からなるため、靴下部27、28の足底部の所望の位置に、容易に装着可能である。また、本実施例の電極21、22は、柔軟な導電性布からなるため、固い靴底だけでなく、柔軟な靴や靴下にも対応可能である。
【0067】
また、歩行信号生成のために大型の圧力センサを用いる場合、遊脚時の足裏の変形に伴って信号が誤検出されることが起こり得る。これに対し、本実施例の構成では、足裏の電極21または22が導電性シート33から離れると、次に電極21または22が導電性シート33に接触するまで、絶縁状態が保たれる。このため、遊脚時の足裏の変形が、歩行信号生成装置1の出力端子OUT1からの出力に影響を与えることはなく、足裏の変形に伴って信号が誤検出されることは起こり得ない。
【0068】
また、大型の圧力センサは高価であるが、導電性布からなる電極21、22は比較的安価である。本実施例によれば、歩行信号生成装置1を、シンプルな回路構成により実現でき、コストの抑制を図りながら精度の良い検出信号を得ることができる。
【0069】
<実施例2>
上記実施例1では、電極21、22が、左右の各装着部20A、20Bにそれぞれ一つずつ配された。これに対し、実施例2では、右側装着部20Aに、2つの電極(21H、21T)が配される。このような構成がとられることにより、遊脚期に、どちらの脚が遊脚状態にあるかが判別可能になる。すなわち、上記実施例1における遊脚期が、さらに右脚遊脚期と左脚遊脚期とに識別され得る。
【0070】
図6は、本実施例にかかる歩行信号生成装置1の回路構成を示す図である。図6の電気回路では、図2の回路構成に対し、装着部20Aの電極21が2つの電極21H、21Tに置き換えられ、抵抗器14が2つの抵抗器14H、14Tに置き換えられ、入力端子部11の入力端子IN1が2つの入力端子IN1H、IN1Tに置き換えられ、出力端子部12の出力端子OUT1が2つの出力端子OUT1H、OUT1Tに置き換えられている。
【0071】
具体的には、図2の構成に比べて、右側装着部20Aの電極が、2つの電極21H、21Tに分離され、配線23Tと、抵抗器14Tと、出力端子OUT1Tが追加されている。配線23Hは、踵側の電極21Hと入力端子IN1Hとを接続し、配線23Tは、足尖側の電極21Tと入力端子IN1Tとを接続する。入力端子IN1H、IN1Tと、電源13の正極との間に、それぞれ、2つの抵抗器14H、14Tが直列に接続される。抵抗器14H、14Tは、導電性布(電極21H、21T、22、導電シート33)に比較して、十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0072】
図7(a)および図7(b)は、装着部20の構成を示す図である。図7(a)は、各装着部20A、20Bの足底部を下側からみた図である。図7(b)は、右側装着部20Aを右側(図7(a)の矢印方向参照)から見た図である。
【0073】
電極21Hは、導電性布からなり、靴下部27の踵部分を覆うように、踵側が踵部分に沿って湾曲した形状を有する。配線23Hは、電極21H上面の踵部分に配される接着領域25Hにおいて、導電性接着剤により、電極21Hに接着される。このように配線23Hが電極21Hに接着された状態において、電極21Hの上面が、靴下部27の踵部に装着される。
【0074】
電極21Tも、電極21Hと同様、導電性布からなる。電極21Tは、靴下部27の足尖部分を覆うように、足尖側が足尖部に沿って湾曲した形状を有する。配線23Tは、電極21T上面の足尖部分に配される接着領域25Tにおいて、導電性接着剤により、電極21Tに接着される。このように配線23Tが電極21Tに接着された状態において、電極21Tの上面が、靴下部27の足尖部に、装着される。
【0075】
接着領域25H、25Tから伸びる2本の配線23H、23Tは、伸縮するバンド29によって、右脚Aに固定される。なお、左側装着部20Bの構成は、実施例1における左側装着部20Bの構成と同じである。
【0076】
図7の構成により、右側装着部20Aが歩行者の右脚Aに装着された状態で、トレッドミル30上で歩行がなされると、右脚踵AHが接地されたタイミングで電極21Hが導電性シート33に接触し、次に、電極21H、21Tの両方が導電性シート33に接触し、その後、電極21Tのみが導電性シート33に接触し、最後に、右脚足尖ATが離地されるタイミングで電極21Tが導電性シート33から離れるようになる。
【0077】
図6を参照して、電極22が導電性シート33に接触した状態で、電極21Tと電極21Hの両方が導電性シート33から離れていると、出力端子OUT1H、OUT1Tには、電源13の電位Vが現れる(出力値ON)。また、電極22が導電性シート33に接触した状態で、電極21Hが導電性シート33に接触すると、出力端子OUT1Hの電位が略ゼロ電位に立ち下がる(出力値OFF)。電極22が導電性シート33に接触した状態で、電極21Tが導電性シート33に接触すると、出力端子OUT1Tの電位が略ゼロ電位に立ち下がる(出力値OFF)。さらに、電極21Tと電極21Hの両方、または、何れか一方が導電性シートに接触した状態で、電極22が導電性シート33から離れると、
出力端子OUT1H、OUT1Tの電位はVとなる(出力ON)。
【0078】
図8は、図1と同様の歩行が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図8の下側には、参照のために、図1と同様の歩行の動作が示される。図8(a)、(b)には、それぞれ、出力端子OUT1H、OUT1Tの出力値が示されている。
【0079】
図8(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地し且つ左脚Bが立脚している期間T0〜T2においてOFFであり、それ以外の期間においてONである。また、図8(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地し且つ左脚Bが立脚している期間T1〜T2およびT5〜T7においてOFFであり、それ以外の期間においてONである。
【0080】
上記実施例1と同様の理由から、本実施例においても、出力端子OUT1Hからの電圧信号は、右脚踵AHが接地(T0)または左脚足尖BTが離地(T2)がされると略同じタイミングで変化し、電圧信号の立ち上がりおよび立ち下がりは鋭い。また、出力端子OUT1Tからの電圧信号は、右脚足尖ATが接地(T1)、左足足尖BTが離地(T2)、左脚踵BHが接地(T5)または右脚足尖ATが離地(T7)がされると略同じタイミングで変化し、電圧信号の立ち上がりおよび立ち下がりは鋭い。
【0081】
図9は、図5で説明された歩行動作が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図9(a)は、出力端子OUT1Hからの出力値を示し、図9(b)は、出力端子OUT1Tの出力値を示す。
【0082】
図9(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地し且つ左脚Bが立脚している期間S0〜S3およびS6〜S8においてOFFであり、それ以外の期間においてONである。また、図9(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地し且つ左脚Bが立脚している期間S1〜S3およびS6〜S9においてOFFであり、それ以外の期間においてONである。
【0083】
図8の場合と同様に、図9の場合における出力端子OUT1H、OUT1Tからの電圧信号は、右脚Aの踵部AHもしくは足尖部ATまたは左脚Bが接地または離地されると略同じタイミングで変化し、図9(a)および(b)の出力波形の立ち上がりおよび立ち下がりは鋭い。
【0084】
このように、歩行動作がどのようであっても、出力端子OUT1H、OUT1Tからの電圧信号が変化するタイミングは、脚が接地または離地されるタイミングに略同じであり、出力波形の立ち上がりおよび立ち下がりは鋭い。
【0085】
図8(a)および(b)または図9(a)および(b)において、両脚支持期、右脚遊脚期および左脚遊脚期は、以下のようにして、識別される。
【0086】
まず、両脚支持期は、出力端子OUT1Hおよび出力端子OUT1Tのうち少なくとも一方の出力がOFFである期間である。
【0087】
なお、歩行においては、2種類の両脚支持期がある。一つは、右脚Aが接地することにより開始される両脚支持期(以下、「両脚支持期(I)」と言う。)であり、もう一つは、左脚Bが接地することにより開始される両脚支持期(以下、「両脚支持期(II)」と言う。)である。
【0088】
両脚支持期(I)は、出力端子OUT1Hの出力が先にOFFへ変化することにより開始される。これに対し、両脚支持期(II)では、出力端子OUT1Hからの出力が先にOFFへ変化することはない。このように、出力端子OUT1Hからの出力が先にOFFに変化するか否かによって、両脚支持期が両脚支持期(I)と両脚支持期(II)の何れであるかが識別可能である。
【0089】
図8において、両脚支持期(I)は、T0〜T2であり、両脚支持期(II)は、T5〜T7である。図9において、両脚支持期(I)は、S0〜S3であり、両脚支持期(II)は、S6〜S9である。
【0090】
右脚遊脚期は、両脚支持期(I)の前の遊脚期(T7〜T10、S9〜S12)である。別の言い方では、右脚遊脚期は、両脚支持期(II)の後の遊脚期である。左脚遊脚期は、両脚支持期(II)の前の遊脚期(T2〜T5、S3〜S6)である。別の言い方では、右脚遊脚期は、両脚支持期(I)の後の遊脚期である。
【0091】
この他、遊脚期に入る直前の出力端子OUT1TのOFFの長さによって、その遊脚期が左脚遊脚期であるか右脚遊脚期であるかを識別することも可能である。たとえば、図8のタイミングT1において右脚Aの足尖ATが接地してからタイミングT2において左脚Bが離地されるまでの期間Tbは通常比較的短く、タイミングT5において左脚踵BHが接地してからタイミングT7において右脚Aが離地されるまでの期間Taは、接地位置が左脚Bの踵BHから足尖BTに移行する期間だけ、Tbよりも長い。よって、遊脚期に入る前のOFF期間の長さを互いに比較することにより、その遊脚期が、右脚遊脚期か左脚遊脚期かを判別可能である。
【0092】
以上のようにして、本実施例では、両脚支持期、右脚遊脚期および左脚遊脚期を、出力端子部12からの出力に基づいて識別可能である。
【0093】
以上、本実施例によると、歩行時において、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、出力端子OUT1HまたはOUT1Tからの電圧信号が、ONまたはOFFへ切り替えられる。このとき、電圧信号の立ち上がりおよび立ち下がりは、鋭い。出力端子OUT1H、OUT1Tからの電圧信号の立ち上がりおよび立ち下がりが鋭いため、両脚支持期、左脚遊脚期および右脚遊脚期の識別が精度よく行える。よって、本実施例においても、歩行周期を、良好に検出することが可能となる。
【0094】
<実施例3>
上記実施例2では、左脚Bの踵および足尖が接地および離地するタイミング(T6、S7)が個別に検出されなかった。これに対し、実施例3では、両脚の踵および足尖が接地および離地するタイミングが、それぞれ個別に検出される。
【0095】
なお、上記実施例1、2では、導電性シート33は接地(グランド接続)されなかったが、本実施例では、トレッドミル30に備えられる導電性シート33は、グランド接続される。
【0096】
図10は、本実施例に係る歩行信号生成装置1の回路構成を示す図である。図10の回路では、図6の回路構成に対し、電極22が2つの電極22H、22Tに置き換えられ、2つの抵抗器15H、15Tが追加され、入力端子部11の入力端子IN2が2つの入力端子IN2H、IN2Tに置き換えられ、出力端子部12に2つの出力端子OUT2H、OUT2Tに加えられている。さらに、トレッドミル30の導電性シート33が、接地される。これにより、導電性シート33には、常にグランド電位が印加される。
【0097】
具体的には、図6の構成に比べて、左側装着部20Bの電極が、2つの電極22H、22Tに分離され、配線24Tと、抵抗器15Tと、出力端子OUT2Tが追加されている。配線24Hは、踵側の電極22Hと入力端子IN2Hとを接続し、配線24Tは、足尖側の電極22Tと入力端子IN2Tとを接続する。入力端子IN2H、IN2Tと電源13の正極との間に、それぞれ、2つの抵抗器15H、15Tが直列に接続される。抵抗器15H、15Tは、上記実施例1、2と同様、導電性布(電極21H、21T、22H、22T、導電シート33)に比較して、十分に大きな電気抵抗を有する(たとえば数kΩ)。
【0098】
図11は、装着部20の構成を示す図である。図11の右側装着部20Aは、図7(a)の右側装着部20Aの構成と同じである。図11の左側装着部20Bは、図7(a)の右側装着部20Aに装着される電極および配線の構成を、左右反転して、左側装着部20Bへ適用したものである。
【0099】
すなわち、左側装着部20Bにおいて、電極22Hは、導電性布からなり、左脚Bの足底の踵部を覆う。配線24Hは、接着領域26Hにおいて、導電性接着剤により、電極22Hに接着される。電極22Tは、導電性布からなり、左脚Bの足底の足尖部を覆う。配線24Tは、接着領域26Tにおいて、導電性接着剤により、電極22Tに接着される。2本の配線24H、24Tは、伸縮するバンド(図示せず)によって、右脚Aに固定される。
【0100】
左側装着部20Bが歩行者の左脚Bに装着された状態で、トレッドミル30上で歩行がなされると、左脚踵BHが接地がされたタイミングで電極22Hが導電性シート33に接触し、次に、電極22H、22Tの両方が導電性シート33に接触し、その後、電極22Tのみが導電性シート33に接触し、最後に、右脚足尖ATが離地されるタイミングで、電極22Tが導電性シート33から離れるようになる。
【0101】
図10を参照して、電極21H、21T、22H、22Tが導電性シート33に接触していなければ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tには、それぞれ、電源13の電位Vが現れる(出力ON)。また、電極21H、21T、22H、22Tが導電性シート33に接触すると、導電性シート33が接地されているため、出力端子OUT1H、OUT1T、OUT2H、OUT2Tの電位は、それぞれ、略ゼロ電位に立ち下がる(出力OFF)。
【0102】
図12は、図1と同様の歩行が行われた場合の出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図12(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。
【0103】
図12(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地している期間T0〜T4においてOFFであり、それ以外の期間においてONである。図12(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地している期間T1〜T7においてOFFであり、それ以外の期間においてONである。図12(c)において、出力端子OUT2Hからの出力は、左脚踵BHが接地している期間T5〜T9においてOFFであり、それ以外の期間においてONである。図12(d)において、出力端子OUT2Tからの出力は、左脚足尖BTが接地している期間T6〜T10およびT0〜T2においてOFFであり、それ以外の期間においてONである。
【0104】
図13は、図5と同様の歩行が行われたときの出力端子部12からの出力の変化を模式的に示すタイミングチャートである。図13(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。
【0105】
図13(a)において、出力端子OUT1Hからの出力は、右脚踵AHが接地している期間S0〜S8においてOFFであり、それ以外の期間においてONである。図13(b)において、出力端子OUT1Tからの出力は、右脚足尖ATが接地している期間S1〜S9においてOFFであり、それ以外の期間においてONである。図13(c)において、出力端子OUT2Hからの出力は、左脚踵BHが接地している期間S6〜S12およびS0〜S2においてOFFであり、それ以外の期間においてONである。図13(d)において、出力端子OUT2Tからの出力は、左脚足尖BTが接地している期間S7〜S12およびS0〜S3においてOFFであり、それ以外の期間においてONである。
【0106】
図12(a)〜(d)および図13(a)〜(d)に示されるように、本実施例においても、出力端子部12からの電圧信号がONまたはOFFへ切り替えられるときの、電圧信号の立ち上がりおよび立ち下がりはすばやい。また、電圧信号がONまたはOFFへ切り替えられるタイミングは、それぞれの踵または足尖が接地または離地されるタイミングに略同時である。このように、本実施例では、右脚踵AH、右脚足尖AT、左脚踵BHおよび左脚足尖BTの、接地および離地のタイミングが、それぞれ精度よく検出され得る。
【0107】
本実施例に係る歩行信号生成装置1からの出力信号によって、両脚支持期、右脚遊脚期および左脚遊脚期は、以下のようにして、識別される。
【0108】
両脚支持期は、出力端子OUT1H、OUT1Tからの出力のうち少なくとも一つがOFFであり、且つ、出力端子OUT2H、OUT2Tからの出力のうち少なくとも一つがOFFである期間である。右脚遊脚期は、出力端子OUT1HおよびOUT1Tが同時にONである期間(T7〜T10、S9〜S12)である。左脚遊脚期は、出力端子OUT2HおよびOUT2Tが同時にONである期間(T2〜T5、S3〜S6)である。
【0109】
図14は、走行動作時に、走行者の片方の足が接地してから、再びその足が接地して同じ走行体勢に至るまでの、一連の動作を説明するための図である。図14において、横軸右方向が、時間経過の方向を表す。
【0110】
右脚Aの踵AHが接地する右脚踵接地の瞬間U0から、次の右脚踵接地の瞬間U12までの経過時間が、走行動作の一周期(以下、「走行一周期」という。)である。走行周期は、両足が遊脚する両脚遊脚期U4〜U6およびU10〜U12、右脚Aが立脚する右脚立脚期U0〜U4ならびに左脚Bが立脚する左脚立脚期U6〜U10とに大別される。歩行動作に比べ走行動作では、両脚支持期がなく、代わりに、両脚遊脚期がある。右脚立脚期および左脚立脚期は、それぞれ、左脚遊脚期および右脚遊脚期に相当する。
【0111】
本実施例の歩行信号生成装置1によれば、歩行周期の他、走行時における走行周期をも検出することが可能である。具体的には、走行周期における両脚遊脚期、右脚立脚期および左脚立脚期を識別できる。
【0112】
図15は、図14の走行動作が行われたときの出力端子部12からの出力の変化を示すタイミングチャートである。図15(a)〜(d)には、それぞれ、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの出力値が示されている。図15の下側には、参照のために、図14と同様の走行動作が示されている。
【0113】
図15(a)において、右脚踵AHが接地している期間にのみ(U0〜U3)、出力端子OUT1Hからの出力がOFFとなる。図15(b)において、右脚足尖ATが接地している期間にのみ(U1〜U4)、出力端子OUT1Tからの出力がOFFとなる。図15(c)において、左脚踵BHが接地している期間にのみ(U6〜U9)、出力端子OU
T2Hからの出力がOFFとなる。図15(d)において、左脚足尖BTが接地している期間にのみ(U7〜U10)、出力端子OUT2Tからの出力がOFFとなる。
【0114】
右脚立脚期は、出力端子OUT1H、OUT1Tの出力の少なくとも一方がOFFの期間として識別され、左脚立脚期は、出力端子OUT2H、OUT2Tの出力の少なくとも一方がOFFの期間として識別される。また、両脚遊脚期は、出力端子OUT1H、OUT1T、OUT2H、OUT2Tの出力の全てがONの期間として識別される。
【0115】
以上、本実施例によれば、歩行時において、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの電圧信号が切り替えられる。このとき、電圧信号の立ち上がりおよび立ち下がりは、鋭い。このため、両脚支持期、左脚遊脚期および右脚遊脚期の識別が、精度よく行われ得る。
【0116】
さらに、走行時において、両脚遊脚期、右脚立脚期および左脚立脚期が切り替わる瞬間と略同時に、出力端子OUT1H、OUT1T、OUT2H、OUT2Tからの電圧信号が切り替えられる。このため、出力端子部12からの出力により、走行周期の両脚遊脚期、右脚立脚期および左脚立脚期を良好に識別できる。
【0117】
よって、本実施例によれば、歩行周期および走行周期を、良好に検出することができる。
【0118】
<応用例1>
上記実施例1〜3の歩行信号生成装置の応用例について説明する。応用例1では、上記実施例1〜3のうち実施例2の歩行信号生成装置1を備えた機能的電気刺激装置が示されている。
【0119】
機能的電気刺激装置は、病院等において、歩行動作の矯正やリハビリなどを目的として利用される。機能的電気刺激装置は、歩行信号生成装置からの検出信号に基づいて、所定のタイミングで、対象の筋肉へ電気刺激を供給する。機能的電気刺激装置は、電気刺激により筋肉の収縮を促すことにより、歩行動作を補助する。
【0120】
図16は、機能的電気刺激装置100の構成を説明する図である。
【0121】
機能的電気刺激装置100は、トレッドミル30、回路ボックス110、電気刺激電極120および配線121を有する。上記実施例2に係る歩行信号生成装置1の検出回路部10は、回路ボックス110内へ収容される。歩行信号生成装置1の装着部20は、歩行者の左右の脚へ装着される。
【0122】
回路ボックス110は、ベルト(図示せず)によって歩行者の腰に装着される。便宜上、図16では、回路ボックス110は、図16に示される歩行者から離れた位置に描かれている。歩行者が導電性シート33の上を歩行すると、回路ボックス110内の回路によって、歩行周期に応じた機能的電気刺激のための電気信号が生成され、生成された電気信号が、配線121を介して、電気刺激電極120へ出力される。
【0123】
電気刺激電極120は、円盤状を有し、皮膚に密着される側の面に、電極(図示せず)を有する。この電極は、配線121へ接続されている。電気刺激電極120は、対象の筋肉に適切に電気刺激を与えるために、歩行者の脚の所定の位置の皮膚に密着固定される。配線121は、回路ボックス110と電気刺激電極120とを接続する。回路ボックス110から電気刺激電極120に電気信号が供給されると、電気信号に応じた電気刺激が、
電気刺激電極120から対象の筋肉に供給される。
【0124】
図17は、機能的電気刺激装置100の全体構成を示すブロック図である。回路ボックス110は、検出回路部10の他に、A/D変換回路111、CPU112、記憶回路113、タイマ114、電気刺激生成回路115を備える。
【0125】
A/D変換回路111は、検出回路部10の出力端子部12から出力される電圧信号をデジタル信号に変換してCPU112へ出力する。CPU112は、記憶回路113に記憶されている制御プログラムに従って機能的電気刺激装置100内の各部を制御する。
【0126】
記憶回路113は、CPU112を動作させるための制御プログラムを記憶する。また、記憶回路113は、CPU112が制御プログラムを実行する際の、ワーキングメモリとしても利用される。たとえば、過去の歩行周期に関するデータや電気信号を発生させるタイミングを決定するためのパラメータ等、各種データやパラメータが、記憶回路113に記憶される。
【0127】
タイマ114は、CPU112の制御のもと、時間の経過を計る。具体的には、タイマ114は、歩行信号生成装置1からの検出信号により検出される歩行一周期の長さ、左右の脚の立脚期および遊脚期の長さ、左右の脚の踵が接地してからの経過時間等を計る。また、タイマ114は、電気刺激生成回路115における電気信号の発生タイミングと終了タイミングを取得するため、CPU112により用いられる。
【0128】
電気刺激生成回路115は、CPU112から入力される制御信号に基づき、電気刺激電極120に電気信号を出力する。なお、図17の構成例では、出力端子部116として2つの端子が示されているが、使用目的に応じて2つ以上の電気刺激電極120が、適宜、出力端子部116へ接続可能なように、出力端子部116は、2つ以上の端子を有してもよい。
【0129】
図18は、機能的電気刺激装置100の動作例を模式的に示す図である。この例では、歩行者の右脚Aの遊脚が機能的電気刺激装置100によりアシストされる。電気刺激電極120は、右脚Aを遊脚させるための位置に密着固定される。なお、機能的電気刺激装置100によるアシストの内容は、たとえば、回路ボックス110の外面に配さられたコントロールパネル(図示せず)等を使用して設定される。
【0130】
この動作例では、同図(b)、(c)に示す検出回路部10の出力端子OUT1H、OUT1Tからの検出信号に基づいて、同図(a)に示す電気信号が、電気刺激生成回路115から出力される。すなわち、右脚遊脚期に移行する直前のタイミングで、右脚Aの対象筋肉を刺激するための電気信号が、電気刺激生成回路115から出力される。これにより、右脚Aの遊脚がアシストされる。具体的には、CPU112により、以下の処理が行われる。
【0131】
歩行が開始されると、CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、両脚支持期(I)、(II)、左脚遊脚期および右脚遊脚期を検出し、さらに、このように検出された歩行周期に基づき、歩行一周期を検出する。かかる検出は、上記実施例2において説明した方法に従って行われる。
【0132】
次に、CPU112は、歩行一周期における両脚支持期(II)の開始タイミングと期間長に基づき、電気信号の発生タイミングt1と時間長t2を設定する。発生タイミングt1は、出力端子OUT1Tからの出力が、ONからOFFへ切り替わったタイミングからの経過時間として設定され、時間長t2は、発生タイミングt1からの時間長として設
定される。
【0133】
こうして、CPU112は、歩行一周期毎に、右脚遊脚期に移行する直前のタイミングで、電気信号を出力する。これにより、右脚の遊脚がアシストされ、歩行者の歩き方が矯正される。
【0134】
なお、発生タイミングt1と時間長t2は、当該歩行周期の一回前に取得された歩行周期(両脚支持期(I)、(II)左脚遊脚期および右脚遊脚期)に基づいて設定されても良く、あるいは、当該歩行周期の一回前から数回前までの間に取得された歩行周期を統計処理して設定されても良い。
【0135】
以上、本応用例1によれば、CPU112は、実施例2の歩行信号生成装置1からの検出信号にもとづいて、目的に応じた所望のタイミングで、対象の筋肉へ電気刺激を印加することができる。実施例2で説明された通り、歩行信号生成装置1からの検出信号の変化タイミングは、各歩行期間の開始終了タイミングに、精度良く一致する。このため、対象の筋肉へ印加される電気刺激の時間精度も良好となり、歩行動作の補助またはリハビリが効果的に行われ得る。
【0136】
<応用例2>
応用例2は、実施例2の歩行信号生成装置1を備えた歩行状態表示システムに関する。歩行状態表示システムは、歩行状態を画像で表示することにより、歩行状態を歩行者へ通知する。歩行状態表示システムは、病院等において、歩行動作の矯正やリハビリなどを目的として利用される。歩行信号生成装置1からの検出信号に基づいて、歩行状態に関する各種の情報が、リアルタイムで、液晶ディスプレイ等の画像表示装置に表示される。
【0137】
図19は、歩行状態表示システム200の構成を説明する図である。
【0138】
歩行状態表示システム200は、トレッドミル30、回路ボックス210および画像表示装置220を有する。なお、歩行信号生成装置1の検出回路部10は、回路ボックス210へ収容され、歩行信号生成装置1の装着部20は、歩行者の左右の脚へ装着される。
【0139】
トレッドミル30には、回転計測器35が配置されている。回転計測器35は、ローラ35aと、ローラ35aの回転軸35bとを備える。ローラ35aは、導電性シート33に押し付けられ、導電性シート33の移動に伴って回転する。回転軸35bには、回転軸35bの回転速度を検出するためのロータリーエンコーダが装着されている。ロータリーエンコーダからの出力が、ケーブル234を介して回路ボックス210に供給される。回路ボックス210は、ロータリーエンコーダからの出力に基づいて、導電性シート33の移動速度(歩行者の歩行速度)を算出する。
【0140】
なお、ローラ35aと回転軸35bを配さずに、軸31にロータリーエンコーダを装着しても良い。また、回転計測器35を配さずに、回路ボックス210の外面に配さられたコントロールパネル(図示せず)等を使用して、導電性シート33の移動速度(歩行者の歩行速度)を回路ボックス210に手入力するようにしても良い。
【0141】
回路ボックス210は、ベルト(図示せず)により歩行者の腰に装着される。便宜上、図19では、回路ボックス110は、図16に示される歩行者から離れた位置に描かれている。歩行者が、導電性シート33の上を歩行すると、回路ボックス210内の回路によって、歩行状態を歩行者へ通知するための画像に関する映像信号が生成され、生成された映像信号が、ケーブル220aを介して画像表示装置220に送信される。これにより、歩行者の歩行状態に関する情報が、画像表示装置220に表示れる。
【0142】
図20は、歩行状態表示システム200の全体構成を示すブロック図である。
【0143】
回路ボックス210は、図17の回路ボックス110に対し、電気刺激生成回路115が映像デコーダ212に置き換えられ、入力回路211がさらに加えられたものである。
【0144】
入力回路211は、回転計測器35からの移動速度を表す電気信号(ロータリーエンコーダからの出力)を受信する。入力回路211は、受信した電気信号を、CPU112が処理できる形式のデジタル信号へ変換し、CPU112へ出力する。CPU112は、入力回路211から入力されたデジタル信号に基づいて、導電性シート33の移動速度を算出する。
【0145】
本応用例において、記憶回路113は、歩行状態を表す画像を表示するための制御プログラムを記憶する。CPU112は、記憶回路113に記憶されている制御プログラムに従って各部を制御する。CPU112は、歩行状態を通知するための映像信号を生成し、映像デコーダ212へ出力する。
【0146】
映像デコーダ212は、CPU112からの映像信号を画像表示装置220で表示できるアナログまたはデジタルの映像信号に変換し、変換された映像信号をケーブル220aを介して、画像表示装置220へ出力する。画像表示装置220は、映像デコーダ212からの映像信号を受信し、映像信号が表す画像を、画像表示装置220の表示面に表示する。
【0147】
図21(a)〜(d)は、画像表示装置220の表示面220bに表示される画面の例を示す図である。
【0148】
図21(a)は、体の重心位置の偏りを表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0149】
歩行周期から算出される2つの比DR/T、DL/T(図1参照)の偏りは、重心位置の偏りを表す指標とみなされ得る。CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、2つの比DR/T、DL/Tを算出し、これら2つの値DR/T、DL/Tの偏りを、重心位置の偏りとして、画像表示装置220の表示面220bに表示させる。なお、DR>DLの場合は、体の重心位置が右に偏っているとみなされ、逆に、DL<DRの場合は、体の重心位置が左に偏っているとみなされる。
【0150】
図21(a)に示されるように、表示面220bには、横に延びるバー221が表示され、バー221の左右方向の中心位置には、中心線224がさらに表示される。バー221は、分割線225により、左右に2つのバー222、223に分割される。分割線225は、バー221の全長を、左右にそれぞれDR/T、DL/Tの割合で分割する位置に表示される。
【0151】
CPU112は、歩行動作中、随時、比DR/T、DL/Tを算出し、分割線225の位置を更新する。これにより、歩行者は、歩行動作中の各タイミングにおいて、重心位置の偏りを知ることができ、適宜、歩行動作を矯正することができる。
【0152】
図21(b)は、接地時間を表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0153】
CPU112は、A/D変換回路111から入力されるデジタル信号に基づき、歩行一
周期Tを検出する。また、CPU112は、右脚接地時間TRおよび左脚接地時間TLを検出する(図1参照)。さらに、CPU112は、検出した歩行一周期Tと右脚接地時間TRおよび左脚接地時間TLとに基づいて、割合TR/TおよびTL/Tを算出し、算出した割合TR/TおよびTL/Tを、画像表示装置220の表示面220bに表示させる。
【0154】
図21(b)に示されるように、表示面220bには、横に並べられた、同じ高さの2本のバー230、231が表示される。バー230および231の上辺の位置に、横方向の一点鎖線が表示される。バー230および231の高さは、歩行一周期Tに対応する。各バー230、231には、バー232、233がさらに表示される。各バー232および233の高さは、それぞれ、歩行一周期に対する右脚接地時間TRおよび左脚接地時間TLの割合TR/TおよびTL/Tに対応する。さらに、これら割合TR/TおよびTL/Tを百分率で表す数字が、各バー232および233に付記される。
【0155】
CPU112は、歩行動作中、随時、割合TR/TおよびTL/Tを算出し、バー232、233の高さと、これらバー232、233に付記された数字を更新する。これにより、歩行者は、歩行動作中の各タイミングにおいて、左右の脚の接地時間や接地時間の偏りを知ることができ、適宜、歩行動作を矯正することができる。たとえば、図21(b)の場合、歩行者は、右脚の接地時間が現在よりも長くなるように、歩行動作を矯正する。
【0156】
図21(c)は、歩幅、歩行率および歩行比を表示するための制御プログラムが実行されたときの表示画面を示す図である。
【0157】
CPU112は、入力回路211からのデジタル信号に基づいて算出した歩行速度Vと、A/D変換回路111から入力されるデジタル信号に基づいて検出された歩行一周期T(=2歩進むのに要する時間)から、V×T/2の演算を行い、算出した値V×T/2を歩幅として取得する。また、CPU112は、歩行率=60/Tを算出し、さらに、歩行比=歩幅/歩行率を算出する。
【0158】
図21(c)に示されるように、CPU112は、算出した歩幅、歩行率および歩行比を表す折れ線グラフを、表示面220bに表示する。グラフの横軸は、時間の経過を表す。図21(c)において、3本の折れ線240、241、242は、歩幅、歩行率および歩行比の遷移を、それぞれ表す。表示面220bには、さらに、歩行比の標準値を表す標準歩行比線243が表示される。
【0159】
CPU112は、歩行動作中、随時、歩幅、歩効率および歩行比を算出し、表示面220bに表示される画面を更新する。これにより、歩行者は、現在および過去の歩幅、歩行率および歩行比を、表示面220bに表示される折れ線240、241、242を通して知ることができ、適宜、歩行動作を矯正することができる。たとえば、図21(c)の場合、歩行者は、歩幅を大きくするように、または歩行率を小さくするよう、歩行動作を矯正する。
【0160】
なお、図21(a)〜(c)で説明された表示内容は、互いに複数組み合わされてもよい。たとえば、図21(d)に示されるように、図21(a)〜(c)の表示内容が組み合わされて、表示面220bに表示され得る。図21(d)において、表示面220bの左上の部分に、重心位置の偏りを表す画像が表示され、表示面の左下の部分に、左右の脚の接地時間を表す画像が表示される。また、表示面の右側に、歩幅、歩行率および歩行比の遷移を表す折れ線グラフの画像が表示される。
【0161】
本応用例に係る歩行状態表示システム200には、実施例2の歩行信号生成装置1が用
いられている。上述のように、出力端子OUT1HまたはOUT1Tからの電圧信号は、両脚支持期、左脚遊脚期および右脚遊脚期が切り替えられる瞬間と略同時に、すばやく、ON(略0ボルト)またはOFF(略Vボルト)へ切り替えられる(図18(b)、(c)参照)。このため、CPU112は、両脚支持期、左脚遊脚期および右脚遊脚期を、時間精度よく識別でき、結果として、重心位置の偏り、左右の脚の接地時間、歩行率、歩行比等を精度よく算出できる。よって、歩行状態表示システム200は、時間精度のよい、歩行状態に関する情報を表示面220bに表示できる。歩行者は、時間精度の高い情報を表示面220bを通して視認しながら、歩行矯正やリハビリ等を、効果的に実行することができる。
【0162】
<その他>
以上、本発明に係る実施例およびその応用例について説明したが、本発明は、上記実施例および応用例に何ら制限されるものではない。また、本発明の実施例や応用例も、上記以外に、種々の変更が可能である。
【0163】
たとえば、上記実施例1〜3および応用例1〜2では、装着部20の足底部に、導電性布からなる電極が装着されたが、たとえば、導電性布のかわりに導電テープが、電極として、装着部20の靴下部(27、28)に張り付けられてもよい。あるいは、靴下部の足底部が、導電糸により製作され、この足底部が電極として用いられてもよい。これらの場合、検出回路部10と電極とを接続する配線は、導電性接着材等により、導電テープまたは導電糸により製作された靴下部の足底部に接着される。
【0164】
また、装着部20の電極(21、22、21H、22T、22H、22T)と、配線(23、24、23H、23T、24H、24T)とは、電気的に接続されればよく、両者の接続のために導電性接着剤が用いられなくてもよい。たとえば、導電テープを用いて、配線が電極へ張り付けられてもよい。または、半田等により、配線が電極に固定されてもよい。
【0165】
また、装着部20の電極および導電性シート33は、導電性を有していればよく、金属、合金、導電性樹脂、導電ゴム等、いかなる導電性素材を用いて製作されてもよい。なお、上記実施例1〜3および応用例1〜2で利用される導電性素材は、少なくとも導電性を持っていれば良いが、本発明は、この特性とともに他の特性をも導電性素材が持つことを排除するものではない。ただし、導電性素材は、なるべく抵抗値が小さい方が好ましく、上記実施例のような電極および導電性シート33を構成した場合に、検出回路部10側の抵抗器よりも顕著に抵抗値が小さくなるような素材とされる必要がある。
【0166】
また、上記実施例1〜3および応用例1〜2では、装着部20の左右の各装着部20A、20Bには、足底部に1つまたは2つの電極がそれぞれ配されたが、足底部に配された電極の形状および配置位置は、上記実施例1〜3および応用例1〜2で説明されたものに限られる必要はなく、目的に応じて適宜変更可能である。
【0167】
たとえば、図22のように、各装着部20A、20B足底部に、左右に分割された電極が2枚ずつ配される構成がとられてもよい。電極21a、21b、22a、22bには、左右それぞれの踵部の接着領域25a、25b、26a、26bにおいて、配線23a、23b、24a、24bが、それぞれ接続される。電極21a、21b、22a、22bは、それぞれ、踵部分から踵に沿って立ち上がるように湾曲し、また、足尖部分から足尖に沿って立ち上がるように湾曲している。
【0168】
この構成により、右脚が接地する間、常に、電極21a、21bが、ともに導電性シート33へ接触し、電極21aと21bとは、導電性シート33を介して電気的に接続され
る。同様に、左脚が接地する間、常に、電極22a、22bが、ともに導電性シート33へ接触し、電極22aと22bとは、導電性シート33を介して電気的に接続される。
【0169】
図22の構成の場合、図23の回路構成が取られ得る。電極21a、22aと電源13との間に、抵抗器14、15が、それぞれ直列に接続される。出力端子部12は、出力端子OUT1、OUT2からなる。図23の通り、出力端子OUT1は、抵抗器14と電極21a間へ接続される。出力端子OUT2は、抵抗器15と電極22a間へ接続される。電極21b、22bは、グランド端子GNDへ接続される。
【0170】
図24(a)、(b)は、それぞれ、図1の歩行動作がされたときの出力端子OUT1、OUT2からの出力の変化を示すタイミングチャートである。出力端子OUT1からの出力は、右脚遊脚期においてONであり、その他の期間においてOFFである。出力端子OUT2からの出力は、左脚遊脚期においてONであり、その他の期間においてOFFである。出力端子OUT1、OUT2からの出力が共にOFFである期間は、両脚支持期である。
【0171】
また、図25のように、左右の足底部に、それぞれ4つずつの電極が配されてもよい。この場合、図26のように、踵の2つの電極と、足尖の2つの電極に、それぞれ、図23と同様の抵抗器14H、14T、15H、15Tと、出力端子OUT1〜OUT4と、入力端子IN1a〜IN1d、IN2a〜IN2dとからなる回路が適用される。各出力端子からの出力により、各脚の踵の接地期間と足尖の接地期間を個別に検出することができる。
【0172】
また、上記実施例1〜3および応用例1〜2では、出力端子部12の電位とグランド電位との間の電位差が検出信号として用いられたが、他の方法によって検出信号が取得されても良い。たとえば、図4の回路構成において、図27のように、出力端子OUT1´と出力端子OUT1との間の電位差が検出信号とされてもよい。この場合、出力端子OUT1、OUT1´の間の電位差は、両脚支持期においてON(略Vボルト)であり、遊脚期においてOFF(略0ボルト)である。他の実施例2、3においても、同様の変更が可能である。検出信号は、抵抗器に電流が流れることにより生じる電圧降下によって変化するものであれば良い。
【0173】
また、上記実施例1〜3および応用例1〜2では、抵抗器は、電源13と足底部に配された電極との間に、接続されたが、たとえば図28のように、電極と、グランド端子GNDとの間に接続されてもよい。図28の回路構成は、図4の回路構成に対し、抵抗器14が、電源13と電極21との間から、グランド端子GNDと電極22との間へ移動され、出力端子OUT1が、移動された抵抗器14と電極22との間へ接続されたものである。この回路構成によると、出力端子OUT1からの出力(グランド端子GNDに対する電位差)は、両脚支持期においてON(略Vボルト)であり、遊脚期においてOFF(略0ボルト)である。出力端子の接続位置は、抵抗器の位置変更に応じて適宜変更可能である。
【0174】
また、上記実施例1〜3および応用例1〜2では、出力端子部12の一つの出力端子から出力される電圧は、ON(Vボルト)およびOFF(0ボルト)の2値をとった。しかしながら、一つの出力端子から出力される電圧が、3値以上の出力をとってもよい。
【0175】
この場合、たとえば、図10の回路は、図29の回路に変更され得る。図29の回路構成では、図10の回路構成に対し、抵抗器の数と位置および出力端子の数と位置が変更されている。
【0176】
図29において、抵抗器14Hおよび15Hは、グランド端子GNDと電極21Hおよ
び22Hの間に、それぞれ配される。さらに、電源13の正極側に、抵抗器16が、さらに接続される。出力端子部12は、2つの出力端子OUT1およびOUT2からなり、図29に示されるように、抵抗器16の両端へ接続される。出力端子OUT1は、抵抗器16と電源13との間に接続される。出力端子OUT2は、抵抗器16と抵抗器14Tおよび15Tとの間に接続される。
【0177】
図30は、図1の歩行動作がなされたときの、図29の出力端子12からの出力の変化を模式的に示すタイミングチャートである。図30には、出力端子OUT1とOUT2の電位差が検出信号として示されている。なお、図30では、例として、電源13の電圧は12ボルトとされ、抵抗器14H、14T、15H、15T、16の抵抗値は、それぞれ、1kΩ、2kΩ、2kΩ、1kΩ、1kΩとされる。
【0178】
この場合、両脚支持期は、検出信号がゼロから立ち上がったタイミングから最初に立ち下がるまでの期間として識別される。また、各期間の波形の高さによって、その両脚支持期が両脚支持期(I)および両脚支持期(II)の何れであるかが識別される。たとえば、両脚支持期(I)と両脚支持期(II)は、出力が0ボルトである状態(T4〜T5、T9〜T10)から立ち上がった直後の電圧が3.2ボルトを超えたか否かにより識別される。検出信号が3値以上をとる場合の回路構成は、図29の以外にも、適宜、設計され得る。
【0179】
また、上記実施例1〜3および応用例1〜2では、ソックス状の装着部20が用いられたが、装着部20が歩行者の脚に装着されたときに足底部に導電性の電極が配置されればよく、たとえば、靴状の装着部が用いられても良い。靴状の装着部20が用いられる場合においても、電極は、導電性を有していればよく、導電ゴム等、いかなる導電性の素材からも製作されてよい。また、装着部20は、靴下状、靴状の装着部の他、スリッパ状、草履状、長靴状等、いかなる形状へも変更可能である。また、足底部の電極は、歩行者の足底部へ直接配されてもよい。
【0180】
上記実施例1〜3および応用例1〜2では、導電性を有する床面として、トレッドミル30に配された導電性シート33が用いられたが、歩行者が歩行する床面は、導電性を有していればよく、導電性シート33に限られる必要はない。たとえば、トレッドミル30の帯状床面32が導電ゴムで製作され、導電性シート33のかわりに帯状床面32が利用されてよい。また、トレッドミル30以外の、可動性を有する床面が、歩行動作の検出のために用いられてもよい。
【0181】
また、歩行者が歩行する床面は、可動でなくてもよく、たとえば、室内の床や廊下、地面等に導電性シートが敷かれ、その上を、足に装着部20を装着した歩行者が歩行するような形態であっても良い。このように導電性シートが床面に敷かれる場合、導電性シートと床面とは適切に電気的に絶縁されることが好ましい。実施例3の場合には、このように床面に敷かれた導電性シートは、適宜、グランド接続が行われる。
【0182】
また、室内の床や廊下の一部が、予め、金属、合金、導電性樹脂、導電ゴム等、導電性を有する素材により構成されていても良い。この場合、導電性の素材は、網目状に床面に配置されても良い。また、導電性の床面は、必ずしも平坦である必要はなく、目的に応じて、湾曲、段差等があってもよい。
【0183】
上記実施例1〜3および応用例1〜2では、電源13が検出回路部10へ配されたが、電源13は、検出回路部10へ配されなくともよく、検出回路部10に外部から電源を入力するための端子が、設けられてもよい。また、電極へ印加される電圧は、直流に限らず交流であってもよい。この場合、検出回路部10の出力端子部12からは、所定の振幅の
交流電圧が出力される。出力される交流電圧の振幅により、歩行の歩行周期が識別できる。
【0184】
また、上記応用例2では、画像表示装置220に表示される画像が、回路ボックス210で生成され、また、歩行周期の検出や、重心位置の偏り、左右の脚の接地時間、歩行率、歩行比等の変数もまた、回路ボックス210内のCPU112が算出したが、これらの処理の一部または全てが、回路ボックス210の外部で実行されてもよい。また、画像表示装置220は、トレッドミル30上の歩行者から離れた位置にあっても良く、たとえば、歩行者の歩行を矯正する指導員が所持する携帯端末等に、歩行者の歩行状況に関する情報が表示されても良い。さらに、信号の通信は、有線の他、無線により行われてもよい。
【0185】
また、上記実施例3では、導電性シート33のグランド接続の手段として、端子34が用いられたが、導電性シート33を接地するための手段は、これに限られるものではない。たとえば、導電性シート33に接触して回転する導電性のローラを配置し、このローラを介して、導電性シート33を接地しても良い。
【0186】
また、歩行信号生成装置の回路構成は、実施例1〜3および応用例1〜2で説明された回路構成に限られる必要はない。たとえば、抵抗器は、電極に電流が流れると当該電流により電圧降下を起こすように配置されていれば良い。また、歩行信号生成装置の応用例も、上記応用例1、2に限られない。たとえば、歩行信号生成装置からの検出信号に基づき、歩行周期に関する情報を記録、分析または表示するようなシステムにも、本発明の歩行信号生成装置を適用可能である。また、美しい歩行動作を身につけるための歩行訓練のために、本発明の歩行信号生成装置が使用されてよい。
【0187】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0188】
1 … 歩行信号生成装置
21、22、21H、21T、22H、22T、21a、21b、21c、21d、22a、22b、22c、22d … 電極
33 … 導電性シート(床面)
14、15、14H、14T、15H、15T、16 … 抵抗器(電気抵抗部)
OUT1、OUT1´、OUT2、OUT1H、OUT1T、OUT2H、OUT2T
… 出力端子(出力部)
13 … 電源(電位印加部)
【特許請求の範囲】
【請求項1】
足の底部に配される電極と、
前記電極に電位を印加する電位印加部と、
前記電極に電流が流れると当該電流により電圧降下を起こす電気抵抗部と、
前記電圧降下により変化する検出信号を出力する出力部と、
を有することを特徴とする歩行信号生成装置。
【請求項2】
請求項1に記載の歩行信号生成装置において、
前記出力部は、前記電気抵抗部の両端のうち一端に接続された出力端子を有する、
ことを特徴とする歩行信号生成装置。
【請求項3】
請求項1または2に記載の歩行信号生成装置において、
前記電気抵抗部は、前記電位印加部と前記電極に対して直列に接続されている、
ことを特徴とする歩行信号生成装置。
【請求項4】
請求項1ないし3のいずれか一項に記載の歩行信号生成装置において、
一方の足の底部に、前記電極が配され、
他方の足の底部に、他の電極が配され、
前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成される、
ことを特徴とする歩行信号生成装置。
【請求項5】
請求項4に記載の歩行信号生成装置において、
前記電極、前記抵抗部および前記出力部からなる回路部が、前記一方の足の踵部分と足尖部分について、それぞれ配備されている、
ことを特徴とする歩行信号生成装置。
【請求項6】
請求項1ないし3の何れか一項に記載の歩行信号生成装置において、
前記電極、前記抵抗部および前記出力部からなる回路部が、前記足の踵部分と足尖部分について、それぞれ配備されている、
ことを特徴とする歩行信号生成装置。
【請求項7】
請求項1ないし3のいずれか一項に記載の歩行信号生成装置において、
前記足の底部を足幅方向に分割した一方の領域に前記電極が配され、他方の領域に他の電極が配され、
前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成される、
ことを特徴とする歩行信号生成装置。
【請求項8】
請求項7に記載の歩行信号生成装置において、
前記一方の領域と前記他方の領域は、前記足の底部の踵部分を足幅方向に分割した領域である、
ことを特徴とする歩行信号生成装置。
【請求項9】
請求項7に記載の歩行信号生成装置において、
前記一方の領域と前記他方の領域は、前記足の底部の足尖部分を足幅方向に分割した領域である、
ことを特徴とする歩行信号生成装置。
【請求項10】
請求項1ないし9の何れか一項に記載の歩行信号生成装置と、
導電性を有する床面と、
を有することを特徴とする歩行信号生成システム。
【請求項1】
足の底部に配される電極と、
前記電極に電位を印加する電位印加部と、
前記電極に電流が流れると当該電流により電圧降下を起こす電気抵抗部と、
前記電圧降下により変化する検出信号を出力する出力部と、
を有することを特徴とする歩行信号生成装置。
【請求項2】
請求項1に記載の歩行信号生成装置において、
前記出力部は、前記電気抵抗部の両端のうち一端に接続された出力端子を有する、
ことを特徴とする歩行信号生成装置。
【請求項3】
請求項1または2に記載の歩行信号生成装置において、
前記電気抵抗部は、前記電位印加部と前記電極に対して直列に接続されている、
ことを特徴とする歩行信号生成装置。
【請求項4】
請求項1ないし3のいずれか一項に記載の歩行信号生成装置において、
一方の足の底部に、前記電極が配され、
他方の足の底部に、他の電極が配され、
前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成される、
ことを特徴とする歩行信号生成装置。
【請求項5】
請求項4に記載の歩行信号生成装置において、
前記電極、前記抵抗部および前記出力部からなる回路部が、前記一方の足の踵部分と足尖部分について、それぞれ配備されている、
ことを特徴とする歩行信号生成装置。
【請求項6】
請求項1ないし3の何れか一項に記載の歩行信号生成装置において、
前記電極、前記抵抗部および前記出力部からなる回路部が、前記足の踵部分と足尖部分について、それぞれ配備されている、
ことを特徴とする歩行信号生成装置。
【請求項7】
請求項1ないし3のいずれか一項に記載の歩行信号生成装置において、
前記足の底部を足幅方向に分割した一方の領域に前記電極が配され、他方の領域に他の電極が配され、
前記電極と前記他の電極とが短絡されると、前記電位印加部、前記電気抵抗部、前記電極および前記他の電極によって閉ループの回路が構成される、
ことを特徴とする歩行信号生成装置。
【請求項8】
請求項7に記載の歩行信号生成装置において、
前記一方の領域と前記他方の領域は、前記足の底部の踵部分を足幅方向に分割した領域である、
ことを特徴とする歩行信号生成装置。
【請求項9】
請求項7に記載の歩行信号生成装置において、
前記一方の領域と前記他方の領域は、前記足の底部の足尖部分を足幅方向に分割した領域である、
ことを特徴とする歩行信号生成装置。
【請求項10】
請求項1ないし9の何れか一項に記載の歩行信号生成装置と、
導電性を有する床面と、
を有することを特徴とする歩行信号生成システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2012−239544(P2012−239544A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−110314(P2011−110314)
【出願日】平成23年5月17日(2011.5.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、文部科学省、科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(304020177)国立大学法人山口大学 (579)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月17日(2011.5.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、文部科学省、科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(304020177)国立大学法人山口大学 (579)
【Fターム(参考)】
[ Back to top ]