
歩行分析装置及び歩行分析プログラム

【課題】短時間で歩行状態を推定することができる歩行分析装置を提供することである。
【解決手段】実施形態の歩行分析装置は、計測部と、判定部と、特徴量算出部と、推定部と、を有する。計測部は、対象者の動きを計測する。判定部は、対象者の動きに基づいて、対象者が歩行を開始した歩行開始時点を判定する。特徴量算出部は、歩行開始時点が判定された場合、対象者の動きが定常化していない期間として予め定めた歩行開始時点からの期間に計測された対象者の動きの特徴量を算出する。推定部は、特徴量に基づいて、対象者の歩行状態を推定する。
【解決手段】実施形態の歩行分析装置は、計測部と、判定部と、特徴量算出部と、推定部と、を有する。計測部は、対象者の動きを計測する。判定部は、対象者の動きに基づいて、対象者が歩行を開始した歩行開始時点を判定する。特徴量算出部は、歩行開始時点が判定された場合、対象者の動きが定常化していない期間として予め定めた歩行開始時点からの期間に計測された対象者の動きの特徴量を算出する。推定部は、特徴量に基づいて、対象者の歩行状態を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、歩行分析装置及び歩行分析プログラムに関する。
【背景技術】
【0002】
従来、様々なセンサデバイスを用いた歩行運動を評価する装置が、疾病の経過観察や転倒予防等を目的として開発されている。また、医療現場では、バランス能力が必要とされる行為(片足立ちなど)を対象者に実施させ、挙動を観察することにより、転倒危険性を判断することが行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−92696号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術においては、対象者が連続的に歩行中であることを前提として計測及び疾患程度の推定がなされており、歩行開始からの短時間で歩行状態及び転倒可能性を推定することはできなかった。また、医療現場で実施されている手法では、バランス能力が必要とされる行為を対象者に実施させると、対象者自身にリスクや負担がかかってしまうという問題があった。
【課題を解決するための手段】
【0005】
実施形態の歩行分析装置は、計測部と、判定部と、特徴量算出部と、推定部と、を有する。計測部は、対象者の動きを計測する。判定部は、対象者の動きに基づいて、対象者が歩行を開始した歩行開始時点を判定する。特徴量算出部は、歩行開始時点が判定された場合、対象者の動きが定常化していない期間として予め定めた歩行開始時点からの期間に計測された対象者の動きの特徴量を算出する。推定部は、特徴量に基づいて、対象者の歩行状態を推定する。
【図面の簡単な説明】
【0006】
【図1】実施形態にかかる歩行分析装置のハードウェア構成図。
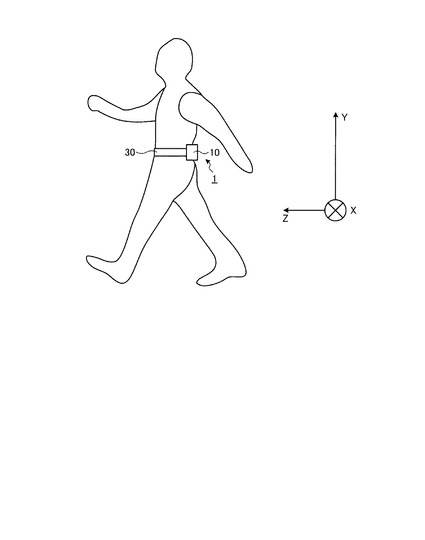
【図2】実施形態にかかる歩行分析装置の装着状態を示す模式図。
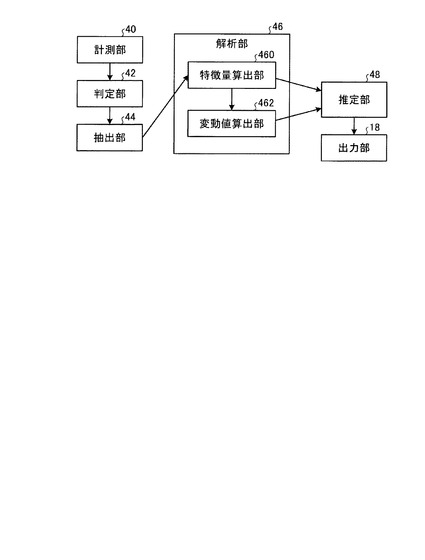
【図3】実施形態にかかる歩行分析装置の機能ブロック図。
【図4】加速度と、判定結果及び解析対象との関係を示すグラフ。
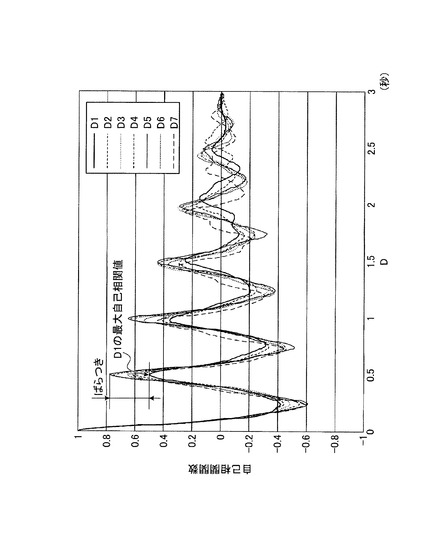
【図5】特徴量算出の解析例を示すグラフ。
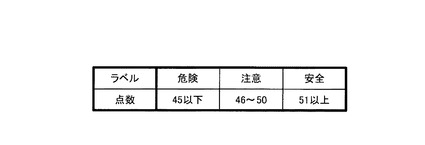
【図6】識別例として学習した3つのクラスのラベルを示す図表。
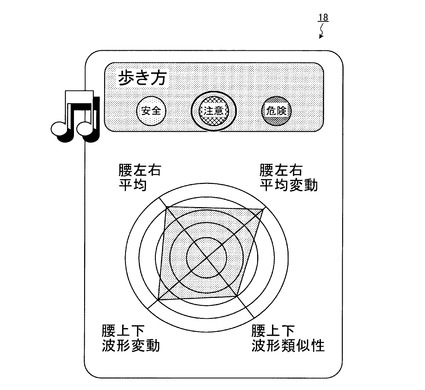
【図7】出力部の出力例を示す概念図。
【図8】実施形態にかかる歩行分析装置の動作を示すフローチャート。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、歩行分析装置の実施の形態を詳細に説明する。図1は、実施形態にかかる歩行分析装置1の構成を例示する構成図である。図1に示すように、歩行分析装置1は、本体部10と、装着部30とを有する。
【0008】
本体部10は、制御部12、記憶部14、入力部16、出力部18、検出部20、通信部22を有する。制御部12は、例えばCPU120を含み、本体部10を構成する各部を制御する。記憶部14は、図示しないROM(Read Only Memory)及びRAM(Random Access Memory)などを含み、制御部12が実行するプログラムや制御部12がプログラムを実行する場合に使用するデータなどを記憶する。また、本体部10には、記憶部14との間でプログラム及びデータを送受可能にされたメモリカードなどの記憶媒体140が着脱自在に設けられている。
【0009】
入力部16は、例えば入力キーやスイッチなどであり、本体部10に対するユーザの入力を受け入れる。出力部18は、例えば液晶パネルなどの表示部180、音声等を出力するスピーカ182、及び図示しないバイブレータなどを有し、本体部10の状態及び本体部10の処理動作の結果などを画面表示、音及び振動の少なくともいずれかで出力する。また、タッチパネルなどにより、入力部16と表示部180とが一体化されていてもよい。
【0010】
検出部20は、例えばサンプリング周波数が128Hzである3軸の加速度センサであり、加速度計測測定範囲が例えば±6G以上となっている。検出部20は、例えば歩行分析装置1が歩行分析の対象者に装着された場合に、鉛直方向、対象者の進行方向及び対象者の進行方向に対してほぼ直交する水平方向(左右方向)の加速度(3方向の加速度)を検出する。
【0011】
通信部22は、外部との通信を行う汎用のインターフェイスであり、例えば有線通信、長距離無線通信及び近接無線通信のいずれに対しても接続可能に構成されている。
【0012】
装着部30は、例えば対象者の腰部に巻きつけられるベルトなどから構成されており、本体部10を例えば対象者の腰部付近に装着させる。
【0013】
図2は、歩行分析装置1を対象者の腰部付近に装着した状態と、歩行分析装置1が計測する加速度の方向を例示する模式図である。図2に示すように、歩行分析装置1は、対象者の腰部付近に装着されると、鉛直方向(Y方向)、対象者の進行方向(Z方向)及び対象者の進行方向に対してほぼ直交する水平方向(X方向)の加速度を検出する。
【0014】
次に、歩行分析装置1の機能について説明する。図3は、歩行分析装置1が有する機能の概要を例示するブロック図である。図4は、検出部20が検出した加速度と、後述する判定部42の判定結果及び抽出部44が抽出する解析対象との関係を例示するグラフである。
【0015】
図3に示すように、歩行分析装置1は、計測部40、判定部42、抽出部44、解析部46、推定部48及び出力部18を有する。なお、図3に示した出力部18は、図1に示した出力部18に対応する。
【0016】
計測部40は、対象者の動きを検出する。具体的には、計測部40は、検出部20を含み、対象者の動きに応じて変化する例えば3方向の加速度を検出することにより、対象者の動き(加速度)を計測する。例えば、計測部40は、本体部10の電源がオンにされると、歩行分析装置1が対象者の歩行状態を推定した結果を出力するため3方向の加速度を連続的に計測する。計測部40が計測した全ての加速度データは、例えば記憶部14(図1)が時刻(又は時間)とともに不要になるまで記憶する。
【0017】
判定部42は、計測部40が計測した結果に基づいて、対象者が歩行を開始したか否かを判定する。具体的には、判定部42は、まず、記憶部14が記憶する加速度データを取得し、予め決められた所定の時間間隔(第1の時間間隔a)で、予め決められた時間枠(第1の設定期間A)内に計測部40が計測した加速度データの分散値を算出する。例えば、判定部42は、図4に示すように、0.5秒ごと(a=0.5秒)に、0.5秒間(A=0.5秒間)に新たに計測部40が計測した加速度データの分散値を算出する。検出部20のサンプリング周波数が128Hzである場合、第1の設定期間A(A=0.5秒間)内に計測部40が計測した加速度データは1方向当たり64個である。なお、第1の時間間隔aは、0.5秒以下が好ましい。また、第1の設定期間Aは、第1の時間間隔aよりも長く設定されてもよい。
【0018】
次に、判定部42(図3)は、加速度データの分散値が予め決められた閾値(閾値σ)以下である期間が第2の設定期間B以上継続した後に、加速度データの分散値が閾値σを超えている期間が第3の設定期間C以上継続した場合に、加速度データの分散値が閾値σを超え始めた時点(又は加速度データの分散値が閾値σ以下であると最後に判断した時点)を、対象者が歩行を開始した歩行開始時点であると判定する。閾値σは、例えば0.04などと設定する。第2の設定期間B及び第3の設定期間Cは、2〜6秒の範囲の値をとることが好ましい。
【0019】
例えば、判定部42は、図4に示すように、加速度データの分散値が閾値σ以下である期間が6秒(第2の設定期間B=6秒間)以上継続した後に、加速度データの分散値が閾値σを超えている期間が6秒(第3の設定期間C=6秒間)以上継続した場合に、加速度データの分散値が閾値σを超え始めた時点(第3の設定期間Cの開始時期)を、対象者が歩行を開始した歩行開始時点であると遡って判定する。図4に示した例では、判定部42は、計測部40が214秒の時点で、208秒の時点が歩行開始時点であったと判定している。このように、判定部42は、歩行開始時点を判定するとともに、対象者が歩行を開始したか否かも判定している。なお、判定部42は、分散値に代えて標準偏差を算出するように構成されてもよい。
【0020】
抽出部44(図3)は、対象者が歩行を開始したと判定部42が判定した場合、計測部40が計測した結果から解析対象を抽出する。具体的には、抽出部44は、対象者が歩行を開始したと判定部42が判定した場合、歩行開始時点から第4の設定期間Dを経過するまでの抽出期間に計測部40が計測した加速度データを、記憶部14が記憶する加速度データから抽出する。第4の設定期間D(抽出期間)は、例えば3秒に設定される。
【0021】
さらに、抽出部44は、予め決められた所定の時間間隔(第2の時間間隔b)で抽出期間の開始時期を歩行開始時点から順次遅らせた複数の他の抽出期間に計測部40が計測した複数の加速度データも、記憶部14が記憶する加速度データから抽出する。
【0022】
例えば、抽出部44は、図4に示すように、対象者が歩行を開始したと判定部42が判定した場合、歩行開始時点から3秒(第4の設定期間D=3秒間)を経過するまでの抽出期間D1に計測部40が計測した加速度データを抽出する。さらに、抽出部44は、0.5秒間隔(第2の時間間隔b=0.5)で抽出期間の開始時期を歩行開始時点から順次遅らせた例えば6つの他の抽出期間D2〜D7に計測部40が計測した6つの加速度データも抽出する。以下、抽出期間D1〜D7のいずれかを特定せずに示す場合、単に抽出期間D(又は第4の設定期間D)と記すことがある。そして、抽出部44が抽出した加速度データは、解析部46が解析対象として用いる。
【0023】
解析部46(図3)は、特徴量算出部460及び変動値算出部462を有する。特徴量算出部460は、抽出部44が抽出した解析対象の特徴量を算出する。具体的には、特徴量算出部460は、抽出部44が抽出した解析対象を受入れ、例えば図5に示すように抽出期間Dごとに例えば鉛直方向の加速度データの自己相関関数を算出し、1番目のピーク値(又は2番目のピーク値)を最大自己相関値とする。特徴量算出部460は、解析対象をローパスフィルタに通した後に自己相関関数を算出するように構成されてもよい。なお、図5においては、抽出期間Dは単にDと記し、抽出期間D1〜D7は単にD1〜D7と記している。特徴量算出部460は、算出した最大自己相関値それぞれを抽出期間Dごとの特徴量として変動値算出部462及び推定部48に対して出力する。
【0024】
なお、特徴量算出部460が算出する自己相関関数は、加速度データが周期性を持っている場合に0以外の値となり、加速度データの変化の振幅が大きくノイズが少ないほど大きな値となる特徴がある。例えば、図5に示すように、抽出期間D1では、最大自己相関値が抽出期間D2〜D7に比べて小さくなっている。つまり、抽出期間D1は、運動していない状態(静止状態など)から動きが定常化するまでの間にある遷移状態であり、加速度データの変化の振幅が小さく周期性が低いと考えられる。
【0025】
また、特徴量算出部460は、検出部20が検出した左右方向の加速度に対して抽出部44が抽出した解析対象の左右対称性を特徴量として算出するように構成されてもよい。例えば、特徴量算出部460は、各抽出期間Dにおいて検出部20が検出した左右方向(X方向)の加速度に対し、加速度データの平均値を特徴量として算出してもよい。
【0026】
変動値算出部462(図3)は、特徴量算出部460が算出した抽出期間Dごとの最大自己相関値の変動の指標となる数値(変動値)を算出する。例えば、変動値算出部462は、抽出期間Dごとの最大自己相関値(図5に示したばらつき参照)の分散値、標準偏差値、又は基準とする抽出期間Dの最大自己相関値と他の抽出期間Dの最大自己相関値との差分の合計を用いた値などを変動値として算出する。なお、対象者の動きが定常化すると、最大自己相関値のばらつきは小さくなると考えられる。
【0027】
また、変動値算出部462は、検出部20が検出した左右方向の加速度に対して抽出部44が抽出した解析対象の左右対称性の変動値を算出するように構成されてもよい。例えば、変動値算出部462は、各抽出期間Dにおいて特徴量算出部460が算出した左右方向(X方向)の加速度データの平均値の分散値を変動値として算出してもよい。
【0028】
ここで、バランス能力が優れている対象者ほど早期に定常歩行状態になることから、バランス能力が優れている対象者は抽出期間Dごとの特徴量の変動も早期に減少すると考えられている。
【0029】
推定部48は、特徴量算出部460が算出した特徴量及び変動値算出部462が算出した変動値を受入れ、受入れた特徴量及び変動値の少なくともいずれかを用いて、対象者の歩行状態を推定する。
【0030】
例えば、推定部48は、抽出期間D1の最大自己相関値及び抽出期間D1〜D7における最大自己相関値の分散値を入力とし、識別器を用いて、対象者の歩行状態を安全・注意(要注意)・危険の3群(3クラス)に分類する。
【0031】
推定部48は、識別器に例えばSVM(Support vector machine)のアルゴリズムを利用する。SVMはカーネル関数を導入した非線形識別に対応可能な2群のパターン識別手法であるが、推定部48は、多群の識別を目的としたone-against-one法やone-against-all法などの複数の識別器を用いた拡張方法を使用して3群への分類を実現している。
【0032】
例えば、推定部48は、対象者の歩行状態を図6に示した3つのクラスに分類する。各クラスには安全・注意・危険のラベル(クラスラベル)が各々付されている。
【0033】
ここで、ラベルについて詳述する。図6に示すように、例えば、各ラベルには、歩行状態を示す点数の範囲がそれぞれ対応づけられている。各ラベルに対応付けられた点数の範囲は、BBS(Berg Balance Scale)の点数に対応している。BBSは、片足立ちや方向転換などの14種類の行為からなるバランステストであって、評価対象者のバランス能力を0〜56点(14種類の行為に0〜4点の評価)の点数で区別するものである。
【0034】
推定部48は,予め計測されたデータに基づいて訓練されている。予め転倒可能性が比較的高い者及び健常者を含む対象者に対し、上述した歩行中の加速度の特徴量及び変動値の算出と、BBSを用いた点数付与とを行い、サンプルデータとして準備し、特徴量及び変動値と歩行状態を示す点数の範囲との対応づけが学習されている。
【0035】
つまり、推定部48は、歩行状態を分類する3つのラベルと上述した特徴量及び変動値との関係について予め学習しており、新たに歩行状態を分析する対象者の特徴量及び変動値に基づいて、対象者の歩行状態を識別(推定)する。
【0036】
なお、推定部48は、特徴量及び変動値の少なくともいずれか1つを用いて対象者の歩行状態を推定するように構成されてもよい。また、推定部48は、学習アルゴリズムを利用することなく、特徴量及び変動値において閾値を単に設定することによって歩行状態を推定するように構成されてもよい。また、推定部48は、他のアルゴリズムとしてニューラルネットワークを利用したり、自己組織化マップやカーネル主成分分析などを利用して次元圧縮を行った後に、パターン認識アルゴリズムを実行するように構成されてもよい。
【0037】
出力部18(図3)は、推定部48が推定した結果を受け入れて出力する。図7は、出力部18の出力例を示す概念図である。図7に示すように、出力部18は、表示及び音などの出力を行うことにより、推定部48が推定した結果を示すラベルなどを出力する。なお、出力部18は、解析部46が算出した結果及び推定部48が推定した結果の少なくともいずれかを出力するように構成されてもよい。
【0038】
次に、歩行分析装置1の動作について説明する。図8は、実施形態にかかる歩行分析装置1が図3に示した機能に対応するプログラムを実行して行う動作を例示するフローチャートである。歩行分析装置1は、例えば歩行などの運動を行っていない状態(静止状態など)で電源がオンにされて、歩行分析を開始する。
【0039】
図8に示すように、ステップ100(S100)において、歩行分析装置1は、例えば電源がオンにされると、検出部20が対象者の加速度検出を開始する。
【0040】
ステップ102(S102)において、判定部42は、第1の時間間隔aが経過したか否かを判断する。判定部42は、第1の時間間隔aが経過したと判断した場合(S102:Yes)にはS104の処理に進み、第1の時間間隔aが経過していないと判断した場合(S102:No)にはS102の処理を継続する。
【0041】
ステップ104(S104)において、判定部42は、例えば第1の設定期間A内に計測部40が計測した加速度データの分散値を算出する。
【0042】
ステップ106(S106)において、判定部42は、S104の処理で算出した加速度データの分散値が予め決められた閾値(閾値σ)以下であるか否かを判断する。判定部42は、加速度データの分散値が閾値σ以下であると判断した場合(S106:Yes)にはS108の処理に進み、加速度データの分散値が閾値σ以下でないと判断した場合(S106:No)にはS112の処理に進む。ここで、S102に進み、処理を継続してもよい。
【0043】
ステップ108(S108)において、判定部42は、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続したか否かを判断する。判定部42は、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続したと判断した場合(S108:Yes)にはS110の処理に進み、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続していないと判断した場合(S108:No)にはS102の処理に進む。
【0044】
ステップ110(S110)において、判定部42は、加速度データの分散値が閾値σよりも大きいか否かを判断する。判定部42は、加速度データの分散値が閾値σよりも大きいと判断した場合(S110:Yes)にはS112の処理に進み、加速度データの分散値が閾値σ以下であると判断した場合(S110:No)にはS102の処理に進む。
【0045】
ステップ112(S112)において、判定部42は、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続したか否かを判断する。判定部42は、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続したと判断した場合(S112:Yes)にはS114の処理に進み、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続していないと判断した場合(S112:No)にはS102の処理に進む。
【0046】
ステップ114(S114)において、判定部42は、歩行開始時点を判定する。
【0047】
ステップ116(S116)において、抽出部44は、判定部42の判定結果を受け入れて解析対象を抽出する。
【0048】
ステップ118(S118)において、特徴量算出部460は、抽出部44が抽出した解析対象を受け入れて特徴量を算出する。
【0049】
ステップ120(S120)において、変動値算出部462は、特徴量算出部460が算出した特徴量を受け入れて変動値を算出する。
【0050】
ステップ122(S122)において、推定部48は、特徴量算出部460が算出した特徴量及び変動値算出部462が算出した変動値の少なくともいずれかを受け入れて対象者の歩行状態を推定する。
【0051】
ステップ124(S124)において、出力部18は、推定部48が推定した結果を出力する。
【0052】
なお、歩行分析装置1は、検出部20が検出する3方向の加速度の全てを用いて(又は任意に組み合わせて)対象者の歩行状態を推定するように構成されてもよいし、1方向の加速度データから算出した特徴量及び変動値の少なくとも1つを用いて対象者の歩行状態を推定するように構成されてもよい。また、上記実施形態では、特徴量算出部460が算出する特徴量と、変動値算出部462が算出する変動値とを区別する場合を例に説明したが、歩行分析装置1は、変動値算出部462が算出する変動値も特徴量の1つであるとして対象者の歩行状態を推定するように構成されてもよい。つまり、歩行分析装置1は、解析部46が算出する値はいずれも対象者の動きに対応する特徴量の1つであるとして、対象者の歩行状態を推定する構成であってもよい。
【0053】
なお、歩行分析装置1において、抽出期間D1の加速度データによって対象者の歩行状態を推定する場合には、対象者の動きが定常化していない期間として予め定めた期間は、抽出期間D1と同じ期間(図4に示した例では3秒)になっている。また、抽出期間D1〜D7の加速度データによって対象者の歩行状態を推定する場合には、対象者の動きが定常化していない期間として予め定めた期間は、歩行開始時点から抽出期間D7の終わりまでの期間(図4に示した例では6秒)になっている。
【0054】
また、歩行分析装置1は、上記実施形態に示された構成に限定されることなく、例えば本体部10が検出部20(又は計測部40)及び通信部22を備え、ネットワークを介して接続されるPC(Personal Computer)などが判定部42、抽出部44、解析部46、推定部48及び出力部18を有するように構成されてもよい。
【0055】
また、本体部10は、粘着部材から構成される装着部30によって対象者身体に直接装着されてもよいし、背負い鞄等の外装部に装着されてもよい。
【0056】
なお、本実施形態の歩行分析装置1で実行されるプログラムは、上述した各部(判定部42、抽出部44、解析部46及び推定部48)を含むモジュール構成となっている。
【0057】
以上説明した実施形態によれば、1つのセンサを用いても、対象者の歩行開始時の特徴量に基づいて歩行状態を推定するので、対象者の歩行状態を短時間に推定することができる。また、上記実施形態によれば、対象者自身にとってリスク・負担が高い複雑な行為を行わなくても、転倒可能性を推定することが可能となる。
【0058】
また、本発明のいくつかの実施形態を複数の組み合わせによって説明したが、これらの実施形態は例として提示したものであり、発明の範囲を限定することは意図していない。これら新規の実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0059】
1 歩行分析装置
10 本体部
12 制御部
120 CPU
14 記憶部
140 記憶媒体
16 入力部
18 出力部
180 表示部
182 スピーカ
20 検出部
22 通信部
30 装着部
40 計測部
42 判定部
44 抽出部
46 解析部
460 特徴量算出部
462 変動値算出部
48 推定部
【技術分野】
【0001】
本発明の実施形態は、歩行分析装置及び歩行分析プログラムに関する。
【背景技術】
【0002】
従来、様々なセンサデバイスを用いた歩行運動を評価する装置が、疾病の経過観察や転倒予防等を目的として開発されている。また、医療現場では、バランス能力が必要とされる行為(片足立ちなど)を対象者に実施させ、挙動を観察することにより、転倒危険性を判断することが行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−92696号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術においては、対象者が連続的に歩行中であることを前提として計測及び疾患程度の推定がなされており、歩行開始からの短時間で歩行状態及び転倒可能性を推定することはできなかった。また、医療現場で実施されている手法では、バランス能力が必要とされる行為を対象者に実施させると、対象者自身にリスクや負担がかかってしまうという問題があった。
【課題を解決するための手段】
【0005】
実施形態の歩行分析装置は、計測部と、判定部と、特徴量算出部と、推定部と、を有する。計測部は、対象者の動きを計測する。判定部は、対象者の動きに基づいて、対象者が歩行を開始した歩行開始時点を判定する。特徴量算出部は、歩行開始時点が判定された場合、対象者の動きが定常化していない期間として予め定めた歩行開始時点からの期間に計測された対象者の動きの特徴量を算出する。推定部は、特徴量に基づいて、対象者の歩行状態を推定する。
【図面の簡単な説明】
【0006】
【図1】実施形態にかかる歩行分析装置のハードウェア構成図。
【図2】実施形態にかかる歩行分析装置の装着状態を示す模式図。
【図3】実施形態にかかる歩行分析装置の機能ブロック図。
【図4】加速度と、判定結果及び解析対象との関係を示すグラフ。
【図5】特徴量算出の解析例を示すグラフ。
【図6】識別例として学習した3つのクラスのラベルを示す図表。
【図7】出力部の出力例を示す概念図。
【図8】実施形態にかかる歩行分析装置の動作を示すフローチャート。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、歩行分析装置の実施の形態を詳細に説明する。図1は、実施形態にかかる歩行分析装置1の構成を例示する構成図である。図1に示すように、歩行分析装置1は、本体部10と、装着部30とを有する。
【0008】
本体部10は、制御部12、記憶部14、入力部16、出力部18、検出部20、通信部22を有する。制御部12は、例えばCPU120を含み、本体部10を構成する各部を制御する。記憶部14は、図示しないROM(Read Only Memory)及びRAM(Random Access Memory)などを含み、制御部12が実行するプログラムや制御部12がプログラムを実行する場合に使用するデータなどを記憶する。また、本体部10には、記憶部14との間でプログラム及びデータを送受可能にされたメモリカードなどの記憶媒体140が着脱自在に設けられている。
【0009】
入力部16は、例えば入力キーやスイッチなどであり、本体部10に対するユーザの入力を受け入れる。出力部18は、例えば液晶パネルなどの表示部180、音声等を出力するスピーカ182、及び図示しないバイブレータなどを有し、本体部10の状態及び本体部10の処理動作の結果などを画面表示、音及び振動の少なくともいずれかで出力する。また、タッチパネルなどにより、入力部16と表示部180とが一体化されていてもよい。
【0010】
検出部20は、例えばサンプリング周波数が128Hzである3軸の加速度センサであり、加速度計測測定範囲が例えば±6G以上となっている。検出部20は、例えば歩行分析装置1が歩行分析の対象者に装着された場合に、鉛直方向、対象者の進行方向及び対象者の進行方向に対してほぼ直交する水平方向(左右方向)の加速度(3方向の加速度)を検出する。
【0011】
通信部22は、外部との通信を行う汎用のインターフェイスであり、例えば有線通信、長距離無線通信及び近接無線通信のいずれに対しても接続可能に構成されている。
【0012】
装着部30は、例えば対象者の腰部に巻きつけられるベルトなどから構成されており、本体部10を例えば対象者の腰部付近に装着させる。
【0013】
図2は、歩行分析装置1を対象者の腰部付近に装着した状態と、歩行分析装置1が計測する加速度の方向を例示する模式図である。図2に示すように、歩行分析装置1は、対象者の腰部付近に装着されると、鉛直方向(Y方向)、対象者の進行方向(Z方向)及び対象者の進行方向に対してほぼ直交する水平方向(X方向)の加速度を検出する。
【0014】
次に、歩行分析装置1の機能について説明する。図3は、歩行分析装置1が有する機能の概要を例示するブロック図である。図4は、検出部20が検出した加速度と、後述する判定部42の判定結果及び抽出部44が抽出する解析対象との関係を例示するグラフである。
【0015】
図3に示すように、歩行分析装置1は、計測部40、判定部42、抽出部44、解析部46、推定部48及び出力部18を有する。なお、図3に示した出力部18は、図1に示した出力部18に対応する。
【0016】
計測部40は、対象者の動きを検出する。具体的には、計測部40は、検出部20を含み、対象者の動きに応じて変化する例えば3方向の加速度を検出することにより、対象者の動き(加速度)を計測する。例えば、計測部40は、本体部10の電源がオンにされると、歩行分析装置1が対象者の歩行状態を推定した結果を出力するため3方向の加速度を連続的に計測する。計測部40が計測した全ての加速度データは、例えば記憶部14(図1)が時刻(又は時間)とともに不要になるまで記憶する。
【0017】
判定部42は、計測部40が計測した結果に基づいて、対象者が歩行を開始したか否かを判定する。具体的には、判定部42は、まず、記憶部14が記憶する加速度データを取得し、予め決められた所定の時間間隔(第1の時間間隔a)で、予め決められた時間枠(第1の設定期間A)内に計測部40が計測した加速度データの分散値を算出する。例えば、判定部42は、図4に示すように、0.5秒ごと(a=0.5秒)に、0.5秒間(A=0.5秒間)に新たに計測部40が計測した加速度データの分散値を算出する。検出部20のサンプリング周波数が128Hzである場合、第1の設定期間A(A=0.5秒間)内に計測部40が計測した加速度データは1方向当たり64個である。なお、第1の時間間隔aは、0.5秒以下が好ましい。また、第1の設定期間Aは、第1の時間間隔aよりも長く設定されてもよい。
【0018】
次に、判定部42(図3)は、加速度データの分散値が予め決められた閾値(閾値σ)以下である期間が第2の設定期間B以上継続した後に、加速度データの分散値が閾値σを超えている期間が第3の設定期間C以上継続した場合に、加速度データの分散値が閾値σを超え始めた時点(又は加速度データの分散値が閾値σ以下であると最後に判断した時点)を、対象者が歩行を開始した歩行開始時点であると判定する。閾値σは、例えば0.04などと設定する。第2の設定期間B及び第3の設定期間Cは、2〜6秒の範囲の値をとることが好ましい。
【0019】
例えば、判定部42は、図4に示すように、加速度データの分散値が閾値σ以下である期間が6秒(第2の設定期間B=6秒間)以上継続した後に、加速度データの分散値が閾値σを超えている期間が6秒(第3の設定期間C=6秒間)以上継続した場合に、加速度データの分散値が閾値σを超え始めた時点(第3の設定期間Cの開始時期)を、対象者が歩行を開始した歩行開始時点であると遡って判定する。図4に示した例では、判定部42は、計測部40が214秒の時点で、208秒の時点が歩行開始時点であったと判定している。このように、判定部42は、歩行開始時点を判定するとともに、対象者が歩行を開始したか否かも判定している。なお、判定部42は、分散値に代えて標準偏差を算出するように構成されてもよい。
【0020】
抽出部44(図3)は、対象者が歩行を開始したと判定部42が判定した場合、計測部40が計測した結果から解析対象を抽出する。具体的には、抽出部44は、対象者が歩行を開始したと判定部42が判定した場合、歩行開始時点から第4の設定期間Dを経過するまでの抽出期間に計測部40が計測した加速度データを、記憶部14が記憶する加速度データから抽出する。第4の設定期間D(抽出期間)は、例えば3秒に設定される。
【0021】
さらに、抽出部44は、予め決められた所定の時間間隔(第2の時間間隔b)で抽出期間の開始時期を歩行開始時点から順次遅らせた複数の他の抽出期間に計測部40が計測した複数の加速度データも、記憶部14が記憶する加速度データから抽出する。
【0022】
例えば、抽出部44は、図4に示すように、対象者が歩行を開始したと判定部42が判定した場合、歩行開始時点から3秒(第4の設定期間D=3秒間)を経過するまでの抽出期間D1に計測部40が計測した加速度データを抽出する。さらに、抽出部44は、0.5秒間隔(第2の時間間隔b=0.5)で抽出期間の開始時期を歩行開始時点から順次遅らせた例えば6つの他の抽出期間D2〜D7に計測部40が計測した6つの加速度データも抽出する。以下、抽出期間D1〜D7のいずれかを特定せずに示す場合、単に抽出期間D(又は第4の設定期間D)と記すことがある。そして、抽出部44が抽出した加速度データは、解析部46が解析対象として用いる。
【0023】
解析部46(図3)は、特徴量算出部460及び変動値算出部462を有する。特徴量算出部460は、抽出部44が抽出した解析対象の特徴量を算出する。具体的には、特徴量算出部460は、抽出部44が抽出した解析対象を受入れ、例えば図5に示すように抽出期間Dごとに例えば鉛直方向の加速度データの自己相関関数を算出し、1番目のピーク値(又は2番目のピーク値)を最大自己相関値とする。特徴量算出部460は、解析対象をローパスフィルタに通した後に自己相関関数を算出するように構成されてもよい。なお、図5においては、抽出期間Dは単にDと記し、抽出期間D1〜D7は単にD1〜D7と記している。特徴量算出部460は、算出した最大自己相関値それぞれを抽出期間Dごとの特徴量として変動値算出部462及び推定部48に対して出力する。
【0024】
なお、特徴量算出部460が算出する自己相関関数は、加速度データが周期性を持っている場合に0以外の値となり、加速度データの変化の振幅が大きくノイズが少ないほど大きな値となる特徴がある。例えば、図5に示すように、抽出期間D1では、最大自己相関値が抽出期間D2〜D7に比べて小さくなっている。つまり、抽出期間D1は、運動していない状態(静止状態など)から動きが定常化するまでの間にある遷移状態であり、加速度データの変化の振幅が小さく周期性が低いと考えられる。
【0025】
また、特徴量算出部460は、検出部20が検出した左右方向の加速度に対して抽出部44が抽出した解析対象の左右対称性を特徴量として算出するように構成されてもよい。例えば、特徴量算出部460は、各抽出期間Dにおいて検出部20が検出した左右方向(X方向)の加速度に対し、加速度データの平均値を特徴量として算出してもよい。
【0026】
変動値算出部462(図3)は、特徴量算出部460が算出した抽出期間Dごとの最大自己相関値の変動の指標となる数値(変動値)を算出する。例えば、変動値算出部462は、抽出期間Dごとの最大自己相関値(図5に示したばらつき参照)の分散値、標準偏差値、又は基準とする抽出期間Dの最大自己相関値と他の抽出期間Dの最大自己相関値との差分の合計を用いた値などを変動値として算出する。なお、対象者の動きが定常化すると、最大自己相関値のばらつきは小さくなると考えられる。
【0027】
また、変動値算出部462は、検出部20が検出した左右方向の加速度に対して抽出部44が抽出した解析対象の左右対称性の変動値を算出するように構成されてもよい。例えば、変動値算出部462は、各抽出期間Dにおいて特徴量算出部460が算出した左右方向(X方向)の加速度データの平均値の分散値を変動値として算出してもよい。
【0028】
ここで、バランス能力が優れている対象者ほど早期に定常歩行状態になることから、バランス能力が優れている対象者は抽出期間Dごとの特徴量の変動も早期に減少すると考えられている。
【0029】
推定部48は、特徴量算出部460が算出した特徴量及び変動値算出部462が算出した変動値を受入れ、受入れた特徴量及び変動値の少なくともいずれかを用いて、対象者の歩行状態を推定する。
【0030】
例えば、推定部48は、抽出期間D1の最大自己相関値及び抽出期間D1〜D7における最大自己相関値の分散値を入力とし、識別器を用いて、対象者の歩行状態を安全・注意(要注意)・危険の3群(3クラス)に分類する。
【0031】
推定部48は、識別器に例えばSVM(Support vector machine)のアルゴリズムを利用する。SVMはカーネル関数を導入した非線形識別に対応可能な2群のパターン識別手法であるが、推定部48は、多群の識別を目的としたone-against-one法やone-against-all法などの複数の識別器を用いた拡張方法を使用して3群への分類を実現している。
【0032】
例えば、推定部48は、対象者の歩行状態を図6に示した3つのクラスに分類する。各クラスには安全・注意・危険のラベル(クラスラベル)が各々付されている。
【0033】
ここで、ラベルについて詳述する。図6に示すように、例えば、各ラベルには、歩行状態を示す点数の範囲がそれぞれ対応づけられている。各ラベルに対応付けられた点数の範囲は、BBS(Berg Balance Scale)の点数に対応している。BBSは、片足立ちや方向転換などの14種類の行為からなるバランステストであって、評価対象者のバランス能力を0〜56点(14種類の行為に0〜4点の評価)の点数で区別するものである。
【0034】
推定部48は,予め計測されたデータに基づいて訓練されている。予め転倒可能性が比較的高い者及び健常者を含む対象者に対し、上述した歩行中の加速度の特徴量及び変動値の算出と、BBSを用いた点数付与とを行い、サンプルデータとして準備し、特徴量及び変動値と歩行状態を示す点数の範囲との対応づけが学習されている。
【0035】
つまり、推定部48は、歩行状態を分類する3つのラベルと上述した特徴量及び変動値との関係について予め学習しており、新たに歩行状態を分析する対象者の特徴量及び変動値に基づいて、対象者の歩行状態を識別(推定)する。
【0036】
なお、推定部48は、特徴量及び変動値の少なくともいずれか1つを用いて対象者の歩行状態を推定するように構成されてもよい。また、推定部48は、学習アルゴリズムを利用することなく、特徴量及び変動値において閾値を単に設定することによって歩行状態を推定するように構成されてもよい。また、推定部48は、他のアルゴリズムとしてニューラルネットワークを利用したり、自己組織化マップやカーネル主成分分析などを利用して次元圧縮を行った後に、パターン認識アルゴリズムを実行するように構成されてもよい。
【0037】
出力部18(図3)は、推定部48が推定した結果を受け入れて出力する。図7は、出力部18の出力例を示す概念図である。図7に示すように、出力部18は、表示及び音などの出力を行うことにより、推定部48が推定した結果を示すラベルなどを出力する。なお、出力部18は、解析部46が算出した結果及び推定部48が推定した結果の少なくともいずれかを出力するように構成されてもよい。
【0038】
次に、歩行分析装置1の動作について説明する。図8は、実施形態にかかる歩行分析装置1が図3に示した機能に対応するプログラムを実行して行う動作を例示するフローチャートである。歩行分析装置1は、例えば歩行などの運動を行っていない状態(静止状態など)で電源がオンにされて、歩行分析を開始する。
【0039】
図8に示すように、ステップ100(S100)において、歩行分析装置1は、例えば電源がオンにされると、検出部20が対象者の加速度検出を開始する。
【0040】
ステップ102(S102)において、判定部42は、第1の時間間隔aが経過したか否かを判断する。判定部42は、第1の時間間隔aが経過したと判断した場合(S102:Yes)にはS104の処理に進み、第1の時間間隔aが経過していないと判断した場合(S102:No)にはS102の処理を継続する。
【0041】
ステップ104(S104)において、判定部42は、例えば第1の設定期間A内に計測部40が計測した加速度データの分散値を算出する。
【0042】
ステップ106(S106)において、判定部42は、S104の処理で算出した加速度データの分散値が予め決められた閾値(閾値σ)以下であるか否かを判断する。判定部42は、加速度データの分散値が閾値σ以下であると判断した場合(S106:Yes)にはS108の処理に進み、加速度データの分散値が閾値σ以下でないと判断した場合(S106:No)にはS112の処理に進む。ここで、S102に進み、処理を継続してもよい。
【0043】
ステップ108(S108)において、判定部42は、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続したか否かを判断する。判定部42は、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続したと判断した場合(S108:Yes)にはS110の処理に進み、加速度データの分散値が閾値σ以下である期間が第2の設定期間B以上継続していないと判断した場合(S108:No)にはS102の処理に進む。
【0044】
ステップ110(S110)において、判定部42は、加速度データの分散値が閾値σよりも大きいか否かを判断する。判定部42は、加速度データの分散値が閾値σよりも大きいと判断した場合(S110:Yes)にはS112の処理に進み、加速度データの分散値が閾値σ以下であると判断した場合(S110:No)にはS102の処理に進む。
【0045】
ステップ112(S112)において、判定部42は、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続したか否かを判断する。判定部42は、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続したと判断した場合(S112:Yes)にはS114の処理に進み、加速度データの分散値が閾値σよりも大きい期間が第3の設定期間C以上継続していないと判断した場合(S112:No)にはS102の処理に進む。
【0046】
ステップ114(S114)において、判定部42は、歩行開始時点を判定する。
【0047】
ステップ116(S116)において、抽出部44は、判定部42の判定結果を受け入れて解析対象を抽出する。
【0048】
ステップ118(S118)において、特徴量算出部460は、抽出部44が抽出した解析対象を受け入れて特徴量を算出する。
【0049】
ステップ120(S120)において、変動値算出部462は、特徴量算出部460が算出した特徴量を受け入れて変動値を算出する。
【0050】
ステップ122(S122)において、推定部48は、特徴量算出部460が算出した特徴量及び変動値算出部462が算出した変動値の少なくともいずれかを受け入れて対象者の歩行状態を推定する。
【0051】
ステップ124(S124)において、出力部18は、推定部48が推定した結果を出力する。
【0052】
なお、歩行分析装置1は、検出部20が検出する3方向の加速度の全てを用いて(又は任意に組み合わせて)対象者の歩行状態を推定するように構成されてもよいし、1方向の加速度データから算出した特徴量及び変動値の少なくとも1つを用いて対象者の歩行状態を推定するように構成されてもよい。また、上記実施形態では、特徴量算出部460が算出する特徴量と、変動値算出部462が算出する変動値とを区別する場合を例に説明したが、歩行分析装置1は、変動値算出部462が算出する変動値も特徴量の1つであるとして対象者の歩行状態を推定するように構成されてもよい。つまり、歩行分析装置1は、解析部46が算出する値はいずれも対象者の動きに対応する特徴量の1つであるとして、対象者の歩行状態を推定する構成であってもよい。
【0053】
なお、歩行分析装置1において、抽出期間D1の加速度データによって対象者の歩行状態を推定する場合には、対象者の動きが定常化していない期間として予め定めた期間は、抽出期間D1と同じ期間(図4に示した例では3秒)になっている。また、抽出期間D1〜D7の加速度データによって対象者の歩行状態を推定する場合には、対象者の動きが定常化していない期間として予め定めた期間は、歩行開始時点から抽出期間D7の終わりまでの期間(図4に示した例では6秒)になっている。
【0054】
また、歩行分析装置1は、上記実施形態に示された構成に限定されることなく、例えば本体部10が検出部20(又は計測部40)及び通信部22を備え、ネットワークを介して接続されるPC(Personal Computer)などが判定部42、抽出部44、解析部46、推定部48及び出力部18を有するように構成されてもよい。
【0055】
また、本体部10は、粘着部材から構成される装着部30によって対象者身体に直接装着されてもよいし、背負い鞄等の外装部に装着されてもよい。
【0056】
なお、本実施形態の歩行分析装置1で実行されるプログラムは、上述した各部(判定部42、抽出部44、解析部46及び推定部48)を含むモジュール構成となっている。
【0057】
以上説明した実施形態によれば、1つのセンサを用いても、対象者の歩行開始時の特徴量に基づいて歩行状態を推定するので、対象者の歩行状態を短時間に推定することができる。また、上記実施形態によれば、対象者自身にとってリスク・負担が高い複雑な行為を行わなくても、転倒可能性を推定することが可能となる。
【0058】
また、本発明のいくつかの実施形態を複数の組み合わせによって説明したが、これらの実施形態は例として提示したものであり、発明の範囲を限定することは意図していない。これら新規の実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0059】
1 歩行分析装置
10 本体部
12 制御部
120 CPU
14 記憶部
140 記憶媒体
16 入力部
18 出力部
180 表示部
182 スピーカ
20 検出部
22 通信部
30 装着部
40 計測部
42 判定部
44 抽出部
46 解析部
460 特徴量算出部
462 変動値算出部
48 推定部
【特許請求の範囲】
【請求項1】
対象者の動きを計測する計測部と、
前記対象者の動きに基づいて、前記対象者が歩行を開始した歩行開始時点を判定する判定部と、
前記歩行開始時点が判定された場合、前記対象者の動きが定常化していない期間として予め定めた前記歩行開始時点からの期間に計測された前記対象者の動きの特徴量を算出する特徴量算出部と、
前記特徴量に基づいて、前記対象者の歩行状態を推定する推定部と、
を有する歩行分析装置。
【請求項2】
前記推定部は、
前記特徴量算出部が算出する特徴量を入力とし、転倒可能性の大きさが異なる複数のクラスラベルのいずれか1つを出力とするパターン認識アルゴリズムによって対象者の歩行状態を推定する請求項1に記載の歩行分析装置。
【請求項3】
前記計測部は、
前記対象者の動きに応じて変化する少なくとも1方向の加速度を計測する請求項1に記載の歩行分析装置。
【請求項4】
前記判定部は、
第1の時間間隔で第1の設定期間内に前記計測部が計測した加速度の分散値が所定の閾値以下である期間が第2の設定期間以上継続した後に、加速度の分散値が前記閾値を超えている期間が第3の設定期間以上継続した場合に、加速度の分散値が前記閾値を超え始めた時点を、前記歩行開始時点と判定する請求項3に記載の歩行分析装置。
【請求項5】
前記計測部は、
前記対象者の鉛直方向の加速度及び前記対象者の進行方向に対してほぼ直交する水平方向の加速度の少なくともいずれかを計測し、
前記特徴量算出部は、
前記歩行開始時点から第4の設定期間を経過するまでに前記計測部が計測した加速度の特徴量を算出する請求項4に記載の歩行分析装置。
【請求項6】
前記特徴量算出部は、
前記計測部が計測した鉛直方向の加速度の自己相関関数における最大自己相関値、及び水平方向の加速度の平均値の少なくともいずれかを特徴量として算出する請求項5に記載の歩行分析装置。
【請求項7】
前記特徴量算出部は、
前記歩行開始時点から第2の時間間隔で前記第4の設定期間を順次遅らせた複数の期間に前記計測部が計測した加速度の特徴量を算出する請求項5に記載の歩行分析装置。
【請求項8】
前記特徴量算出部は、
前記複数の期間に計測された鉛直方向の加速度の自己相関関数における複数の最大自己相関値、及び水平方向の加速度の複数の平均値の少なくともいずれかを特徴量としてさらに算出し、
前記複数の最大自己相関値の変動値及び前記複数の平均値の変動値の少なくともいずれかを算出する変動値算出部をさらに有し、
前記推定部は、
前記変動値及び前記特徴量の少なくともいずれかに基づいて、前記対象者の歩行状態を推定する請求項7に記載の歩行分析装置。
【請求項9】
前記推定部は、
前記特徴量及び前記変動値の少なくともいずれかを入力とし、転倒可能性の大きさが異なる複数のクラスラベルのいずれか1つを出力とするパターン認識アルゴリズムによって前記対象者の歩行状態を推定する請求項8に記載の歩行分析装置。
【請求項10】
前記特徴量、前記変動値及び前記推定部が推定した結果の少なくともいずれかを出力する出力部をさらに有する請求項9に記載の歩行分析装置。
【請求項11】
対象者の動きに基づいて、前記対象者が歩行を開始した歩行開始時点を判定するステップと、
前記歩行開始時点が判定された場合に、前記対象者の動きが定常化していない期間として予め定めた前記歩行開始時点からの期間に計測された前記対象者の動きの特徴量を算出するステップと、
前記特徴量に基づいて、前記対象者の歩行状態を推定するステップと、
をコンピュータに実行させるための歩行分析プログラム。
【請求項1】
対象者の動きを計測する計測部と、
前記対象者の動きに基づいて、前記対象者が歩行を開始した歩行開始時点を判定する判定部と、
前記歩行開始時点が判定された場合、前記対象者の動きが定常化していない期間として予め定めた前記歩行開始時点からの期間に計測された前記対象者の動きの特徴量を算出する特徴量算出部と、
前記特徴量に基づいて、前記対象者の歩行状態を推定する推定部と、
を有する歩行分析装置。
【請求項2】
前記推定部は、
前記特徴量算出部が算出する特徴量を入力とし、転倒可能性の大きさが異なる複数のクラスラベルのいずれか1つを出力とするパターン認識アルゴリズムによって対象者の歩行状態を推定する請求項1に記載の歩行分析装置。
【請求項3】
前記計測部は、
前記対象者の動きに応じて変化する少なくとも1方向の加速度を計測する請求項1に記載の歩行分析装置。
【請求項4】
前記判定部は、
第1の時間間隔で第1の設定期間内に前記計測部が計測した加速度の分散値が所定の閾値以下である期間が第2の設定期間以上継続した後に、加速度の分散値が前記閾値を超えている期間が第3の設定期間以上継続した場合に、加速度の分散値が前記閾値を超え始めた時点を、前記歩行開始時点と判定する請求項3に記載の歩行分析装置。
【請求項5】
前記計測部は、
前記対象者の鉛直方向の加速度及び前記対象者の進行方向に対してほぼ直交する水平方向の加速度の少なくともいずれかを計測し、
前記特徴量算出部は、
前記歩行開始時点から第4の設定期間を経過するまでに前記計測部が計測した加速度の特徴量を算出する請求項4に記載の歩行分析装置。
【請求項6】
前記特徴量算出部は、
前記計測部が計測した鉛直方向の加速度の自己相関関数における最大自己相関値、及び水平方向の加速度の平均値の少なくともいずれかを特徴量として算出する請求項5に記載の歩行分析装置。
【請求項7】
前記特徴量算出部は、
前記歩行開始時点から第2の時間間隔で前記第4の設定期間を順次遅らせた複数の期間に前記計測部が計測した加速度の特徴量を算出する請求項5に記載の歩行分析装置。
【請求項8】
前記特徴量算出部は、
前記複数の期間に計測された鉛直方向の加速度の自己相関関数における複数の最大自己相関値、及び水平方向の加速度の複数の平均値の少なくともいずれかを特徴量としてさらに算出し、
前記複数の最大自己相関値の変動値及び前記複数の平均値の変動値の少なくともいずれかを算出する変動値算出部をさらに有し、
前記推定部は、
前記変動値及び前記特徴量の少なくともいずれかに基づいて、前記対象者の歩行状態を推定する請求項7に記載の歩行分析装置。
【請求項9】
前記推定部は、
前記特徴量及び前記変動値の少なくともいずれかを入力とし、転倒可能性の大きさが異なる複数のクラスラベルのいずれか1つを出力とするパターン認識アルゴリズムによって前記対象者の歩行状態を推定する請求項8に記載の歩行分析装置。
【請求項10】
前記特徴量、前記変動値及び前記推定部が推定した結果の少なくともいずれかを出力する出力部をさらに有する請求項9に記載の歩行分析装置。
【請求項11】
対象者の動きに基づいて、前記対象者が歩行を開始した歩行開始時点を判定するステップと、
前記歩行開始時点が判定された場合に、前記対象者の動きが定常化していない期間として予め定めた前記歩行開始時点からの期間に計測された前記対象者の動きの特徴量を算出するステップと、
前記特徴量に基づいて、前記対象者の歩行状態を推定するステップと、
をコンピュータに実行させるための歩行分析プログラム。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−94316(P2013−94316A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−238246(P2011−238246)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]