
歩行動作分析装置
【課題】体力特性の算出と歩行動作の分類とを行えるとともに、算出した体力特性と歩行動作の分類結果とを表示できる歩行動作分析装置を提供することにある。
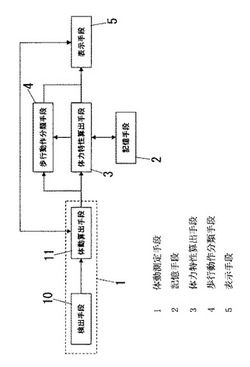
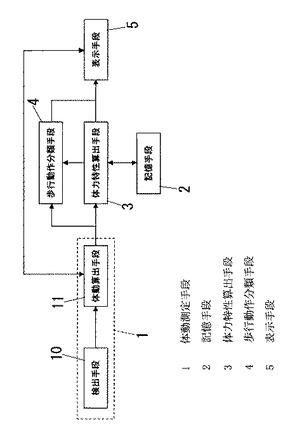
【解決手段】歩行動作分析装置は、歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段1と、体動測定手段1により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段2と、記憶手段2に記憶されたデータテーブルを参照して体動測定手段1により得られた体動から体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4と、体力特性手段3により算出された体力特性および歩行動作分類手段4による歩行動作の分類結果を表示する表示手段5とを備える。
【解決手段】歩行動作分析装置は、歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段1と、体動測定手段1により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段2と、記憶手段2に記憶されたデータテーブルを参照して体動測定手段1により得られた体動から体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4と、体力特性手段3により算出された体力特性および歩行動作分類手段4による歩行動作の分類結果を表示する表示手段5とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人体の歩行動作を測定してその分析結果を表示する歩行動作分析装置に関するものである。
【背景技術】
【0002】
従来から、人体の所定箇所(所定部位)の動作(体動)を測定することによって、人体の動きを検出することが行われている(例えば、特許文献1参照)。
【0003】
特許文献1には、人体の各部位に装着されたセンサから各部位の加速度または角速度を運動情報として取得し、運動情報を元にして各部位の運動強度レベルなどを算出する身体動作センシング装置が開示されている。また、特許文献1には、例えば、手術後のリハビリテーションなどにおける運動の指針として、上記運動強度レベルを採用することが開示されている。
【特許文献1】特開2001−198110号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、近年では、高齢などによる身体機能の低下を改善したいという要望が高まっている。
【0005】
しかしながら、上記特許文献1に開示された身体動作センシング装置は、単に、人体の各部位の運動強度レベルなどを算出するものであるため、手術後のリハビリテーションなどの目安に用いることはできるものの、身体機能の低下を改善するための指針を与えるものではなく、上述の要望に満足に応えることはできていなかった。
【0006】
そこで、本発明者らは、人が高齢になり身体機能が低下してくると、例えば、人体の体力特性の一種である脚力の衰えに伴って足の蹴りの力が弱くなって歩幅が減少することや、転倒を防ぐために足底の中心に重心が一致するような足運びを行うようになって所謂すり足歩行と呼ばれる歩行動作を行うようになることに着目し、身体機能の低下を改善するための指針として、体力特性と、歩行動作の分類結果とを歩行動作の分析結果として提示することに思い至った。
【0007】
本発明は上述の点に鑑みて為されたもので、その目的は、体力特性の算出と歩行動作の分類とを行えるとともに、算出した体力特性と歩行動作の分類結果とを表示できる歩行動作分析装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の問題を解決するために、請求項1の発明では、歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段と、体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段と、記憶手段に記憶されたデータテーブルを参照して体動測定手段により得られた体動から体力特性を算出する体力特性算出手段と、体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段と、体力特性算出手段により算出された体力特性および歩行動作分類手段による歩行動作の分類結果を表示する表示手段とを備えていることを特徴とする。
【0009】
請求項1の発明によれば、体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルを参照して前記体動から体力特性を算出する体力特性算出手段と、体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段とを備えているから、体動測定手段によって、歩行動作を行った際の人体の1乃至複数の部位の体動の測定を行うことにより、体力特性の算出および歩行動作の分類を行うことができ、また、体力特性算出手段により算出された体力特性と歩行動作分類手段による歩行動作の分類結果とを表示する表示手段を備えるから、体力特性と、歩行動作の分類結果とを表示できる。
【0010】
請求項2の発明では、請求項1の発明において、前記データテーブルには、体力特性を柔軟性群、平衡性群、筋力群のいずれかに分類する項目が設けられていることを特徴とする。
【0011】
請求項2の発明によれば、体力特性を項目毎に整理することが可能になる。
【0012】
請求項3の発明では、請求項1または2の発明において、体動測定手段は、人体の腰部に装着されて互いに直交する3軸を回転軸とする角速度を検出する3軸の角速度センサを備え、体力特性算出手段は、前記3軸の角速度それぞれを元にして歩幅、腰回旋可動域、および足関節外旋可動域を算出するように構成されていることを特徴とする。
【0013】
請求項3の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0014】
請求項4の発明では、請求項1または2の発明において、体動測定手段は、頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていることを特徴とする。
【0015】
請求項4の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0016】
請求項5の発明では、請求項4の発明において、体動測定手段は、頭部に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサと、胴体における第4脊椎近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサとを備え、体力特性算出手段は、頭部用加速度センサで検出した身体の前後方向の加速度を元にして首側屈可動域を算出し、頭部用加速度センサで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を算出し、胴部用加速度センサで検出した加速度を元にして足関節背屈可動域を算出し、足用角速度センサで得られた角速度より算出した足関節伸展角度を元にして歩隔を算出し、膝用角速度センサで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を算出し、肩用角速度センサで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域の少なくとも一方を算出するように構成されていることを特徴とする。
【0017】
請求項5の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0018】
請求項6の発明では、請求項1〜5のうちいずれか1項の発明において、体力特性算出手段により算出された体力特性をレーダーチャートの形で表示するように構成されていることを特徴とする。
【0019】
請求項6の発明によれば、複数の体力特性を見やすく表示できるとともに、歩行動作の特徴を分かり易く表示できる。
【0020】
請求項7の発明によれば、請求項1〜6のうちいずれか1項の発明において、表示手段は、体力特性算出手段により算出された体力特性をその基準値を用いて規格化して評価値を算出し、算出した評価値を表示するように構成されていることを特徴とする。
【0021】
請求項7の発明によれば、体力特性の比較が容易になる。
【発明の効果】
【0022】
本発明は、体力特性の算出と歩行動作の分類を行うことができ、また、体力特性と歩行動作の分類結果とを表示できる。
【発明を実施するための最良の形態】
【0023】
(実施形態1)
本実施形態の歩行動作分析装置は、歩行動作を行った際の人体Pの複数箇所における体動を測定して、その測定結果を元にして人体Pの歩行動作を分析するものであって、分析結果として、体力特性と歩行動作の分類結果を表示するように構成されている。
【0024】
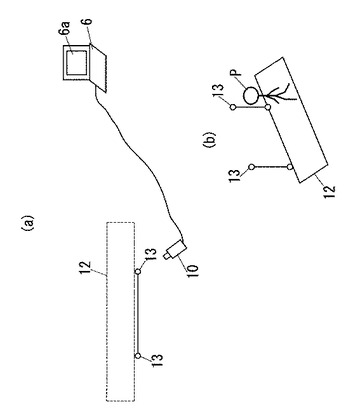
歩行動作分析装置は、図2(a)に示すように、測定対象の人が歩行する計測エリア12を撮像範囲に含むビデオカメラなどの撮像装置からなる検出手段10と、検出手段10に接続された演算処理装置6とで構成されている。なお、計測エリア12は、例えば、長さが10m、幅が2mの矩形状のエリアである。また、撮像装置に用いられるビデオカメラとしては、例えば、IEEE1394対応のビデオカメラを用いることができる。
【0025】
演算処理装置6は、例えば、パソコンなどであって、人体P(図3(a),(b)参照)の所定箇所(動作計測箇所)における体動と体力特性(体力測定項目)との相関関係を示すデータテーブルが記憶されたハードディスクなどの記憶手段2(図1参照)と、液晶ディスプレイ(LCD)などの画像表示装置6a(図2(a)参照)と、キーボードなどのユーザインタフェースからなる入力手段(図示せず)とをハードウェアとして備えている。
【0026】
また、演算処理装置6は、図1に示すように、検出手段10より得られた画像を元にして歩行動作を行った際の人体Pの所定部位における体動を算出する体動算出手段11をソフトウェアとして備えており、この体動算出手段11と検出手段10とによって、歩行動作を行った際の人体Pの1乃至複数の部位における体動を測定する体動測定手段1が構成されている。
【0027】
加えて、演算処理装置6は、図1に示すように、記憶手段2に記憶されたデータテーブルを参照して体動測定手段1により得られた体動から人体Pの体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4と、体力特性算出手段3により算出した体力特性および歩行動作分類手段4による歩行動作の分類結果を画像表示装置6aに表示する表示手段5とをソフトウェアとして備えている。
【0028】
本実施形態における体動測定手段1は、画像処理により体動を測定するものであって、体動の測定を行うにあたっては、計測エリア12内には、図2(a),(b)に示すように、基準マーカ(キャリブレーション)13が、計測エリア12の長さ方向(人体Pの移動方向)に沿った方向に所定間隔を隔てて設置される。基準マーカ13は、検出手段10により得られた画像上の座標、すなわち人体Pの前後方向(水平方向)と、身長方向(鉛直方向)の2次元座標を実空間上の座標(2次元座標)に変換するための座標変換用データテーブルの作成に用いられる。
【0029】
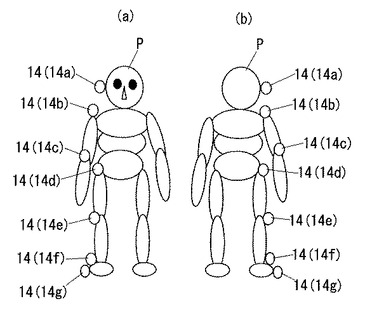
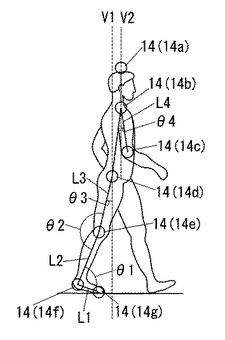
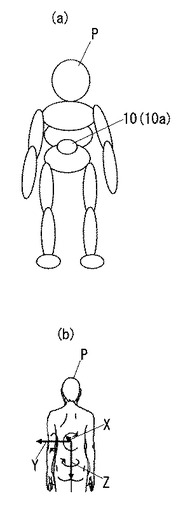
ところで、人体Pには、体動の測定を行う際の目安となる反射マーカ14が取り付けられる。反射マーカ14は、検出手段10により得られた画像上において、人体Pの皮膚や着衣の色と識別できる色のものが用いられる。ここで、反射マーカ14の取り付け位置は、測定する体動の種類によって決定される。例えば、本実施形態では、体動として、頭部の加速度と、足関節角度、膝関節屈曲角度、股関節角度(大腿の振りの角度)、肩関節角度(腕の振りの角度)とを測定するために、図3(a),(b)および図4に示すように、反射マーカ14を人体Pの頭部、肩関節、肘関節、股関節、膝関節、足関節、爪先の7箇所に取り付ける。なお、以下の説明では、人体Pに取り付けられた位置で反射マーカ14を区別するために、必要に応じて反射マーカ14を符号14a〜14gで示す。
【0030】
体動算出手段11は、所定のフレームレート、例えば、30FPS(Frames PerSeconds)で検出手段10より時系列順に連続した画像を取り込むように構成されている。体動算出手段11は、検出手段10より取り込んだ画像を画像処理して各反射マーカ14の画像のみを抽出し、各反射マーカ14の重心位置を算出することで、画像上における各反射マーカ14の2次元座標を得る。そして、演算処理装置12は、画像上における各反射マーカ14の2次元座標を、前記座標変換用データテーブルを用いて、実空間上の座標に変換する。なお、上述の実空間上の座標への変換は、例えば、DLT法などを用いて実現することができる(池上康夫:「写真撮影による運動の三次元的解析法」,Japanese Journal of Sports Sciences,2-8,pp163-170,1983参照)。
【0031】
体動算出手段11は、各反射マーカ14の位置変化(実空間上に変換された各反射マーカ14の2次元座標の変化)に基づいて、人体Pにおいて反射マーカ14が取り付けられた部位の体動、例えば、速度、加速度などを求める。
【0032】
加えて、体動算出手段11は、反射マーカ14の位置変化に基づいて、人体Pの体動として、例えば、各関節の角度(屈曲角度や、伸展角度)を求める。本実施形態では、足関節角度、膝関節屈曲角度、股関節角度(大腿の振りの角度)、肩関節角度(腕の振りの角度)を求め、これら関節角度の最大値または最小値が人体Pの体動として用いられる。
【0033】
ここで、足関節角度は、図4に示すように、爪先に取り付けられた反射マーカ14gおよび足関節に取り付けられた反射マーカ14fを結ぶ直線L1と、膝関節に取り付けられた反射マーカ14eと反射マーカ14fを結ぶ直線L2との間の角度θ1で表される。膝関節角度は、股関節に取り付けられた反射マーカ14dおよび反射マーカ14eを結ぶ直線L3と直線L2と間の角度θ2で表される。股関節角度は、股関節に取り付けられた反射マーカ14dを通る鉛直線V1と直線L3との間の角度θ3で表される。肩関節角度は、肩関節に取り付けられた反射マーカ14bを通る鉛直線V2と、肘関節に取り付けられた反射マーカ14cおよび反射マーカ14bを結ぶ直線L4との間の角度θ4で表される。ところで、本実施形態では、角度θ1〜θ4などの角度を度数法により示しており、角度θ3,θ4については、人体Pの前方側(図4における右方側)を正方向とし、後方側(図4における左方側)を負方向としている。なお、角度の値を弧度法により示してもよい。
【0034】
体動算出手段11により得られた各体動は、体力特性算出手段3および歩行動作分類手段4それぞれに出力される。
【0035】
ところで、体動算出手段11では、検出手段10からのデータの取り込み開始時刻と、取り込み終了時刻とを計時しており、取り込み開始時刻と取り込み終了時刻との時間差を計測時間として算出するように構成されている。また、体動算出手段11は、検出手段10から得た画像を元にして輪郭画像(エッジ画像)を作成するように構成されている。なお、エッジ画像の作成方法は従来周知のものを採用できるから詳細な説明は省略する。
【0036】
体力特性算出手段3は、体動算出手段11により得られた各体動を元に所定の体力特性を算出するものであり、例えば、体動として、頭のゆれ(頭の上下動)、腕の振り(肩関節可動域)、膝の伸び(膝関伸展最大角度)、足首の伸び(足関節伸展最大角度)、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度、歩行速度(歩行スピード)の算出を行う。
【0037】
ここで、頭のゆれは、実空間上の反射マーカ14aの2次元座標の時間変化を元にして算出される。例えば、反射マーカ14aの鉛直方向における最大値と最小値との差分で与えられる。腕の振りは、上述した角度θ3の最大値と最小値との差分で与えられる。膝の伸びは、上述した角度θ2の最大値で与えられる。足首の伸びは、上述した角度θ1の最大値で与えられる。歩幅および歩行速度は、足関節(足首)に取り付けられた反射マーカ14fあるいは爪先に取り付けられた反射マーカ14gの加速度の極大値間あるいは極小値間の時間間隔およびそのときの人体Pの進行方向における距離から求められる。股関節伸展最大角度は、角度θ3の最小値(角度θ3の負の最大値)の絶対値で与えられる。膝関節屈曲最小角度は、角度θ2の最小値で与えられる。足関節伸展(底屈)最大角度は、角度θ1の最大値で与えられる。
【0038】
ところで、歩隔、脚筋力、腰回旋可動域などは、体動の値より直接的に算出することができない。そのため、これらの体力特性の値を算出するにあたっては、記憶手段2に記憶されているデータテーブルが用いられる。このデータテーブルは、例えば、下記の表1に示すような相関関係を示すものであって、足関節伸展最大角度、すなわち角度θ1の最大値から歩隔/身長を求めることができる。また、上腕前方最大角度、すなわち角度θ4の最大値から脚筋力/体重および腰回旋可動域を求めることができる。なお、歩隔および脚筋力を算出するにあたっては、登録されているユーザの身長および体重がそれぞれ用いられる。
【0039】
ところで、データテーブルにおいて右側に設けられた体柔軟性、脚柔軟性、柔軟性・平衡性、筋力、体幹柔軟性などの項目は、体力特性が、柔軟性群、平衡性群、筋力群のいずれに分類されるかを示している。したがって、このデータテーブルによれば、体力特性を用いて柔軟性、平衡性、筋力などの評価が行え、また、体力特性を項目毎に整理することが可能になる。
【0040】
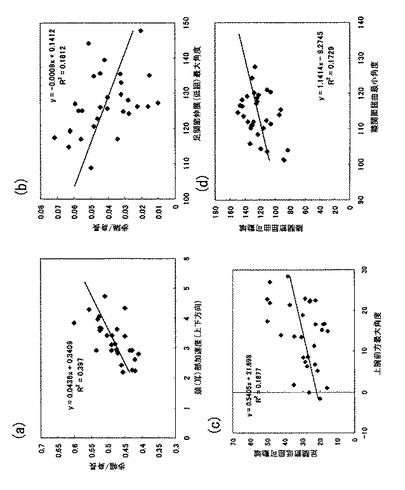
上述したようなデータテーブルを利用することによって、体動から直接的に算出することができない体力特性であっても、体力特性を算出することが可能となる。なお、データテーブルは、例えば、図5(a)〜(d)に示すように、複数の人について、体動と、体力特性とを測定し、最小二乗法などにより体動に対する体力特性の近似式を算出することなどによって得ることができる。
【0041】
【表1】

【0042】
ところで、体力特性算出手段3は、算出した体力特性(本実施形態では、頭のゆれ、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、例えば、体力特性の値が基準値に等しいときに0.5となるような評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値(ただし、歩行速度はその値のみ)を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0043】
歩行動作分類手段4は、体動測定手段1により得られた体動を元にして歩行動作の分類を行うものであって、本実施形態では、体動測定手段1により得られた体動を元にして体力特性算出手段3により算出された体力特性を用いて歩行動作の分類を行うように構成されている。歩行動作分類手段4は、歩行動作の分類を行うにあたっては、頭のゆれ、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度の各評価値からなる計測データと、歩行動作を分類するために用いられる複数のサンプルデータとを用いてクラスタ分析を行う。なお、上記サンプルデータは、例えば、種々の歩行動作を行った際の人体の体動や、動物(例えば、ゴリラ、熊)などの歩行動作を元に測定した体動などを元にして作成することができ、サンプルデータの数が多ければ多いほど、詳細な分類が可能となる。
【0044】
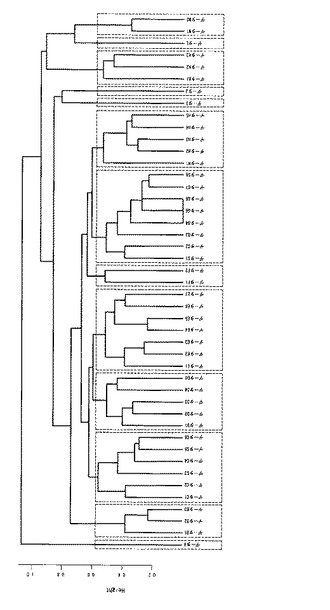
クラスタ分析によれば、例えば、図6に示すようなデンドログラム(樹形図)が得られる。なお、クラスタ分析は、従来周知の分析手法であるから、詳細な説明は省略する。図6に示すデンドログラムは、例えば、1つの計測データと44種類のサンプルデータの全45種類のデータを用いてクラスタ分析を行ったものであって、45種類のデータが、データAからなるAグループ(歩行種別1)、データB1〜B3からなるBグループ(歩行種別2)、データC1〜C6からなるCグループ(歩行種別3)、データD1〜D5からなるDグループ(歩行種別4)、データE1〜E7からなるEグループ(歩行種別5)、データF1,F2からなるFグループ(歩行種別6)、データG1〜G8からなるGグループ(歩行種別7)、データH1〜H5からなるHグループ(歩行種別8)、データIからなるIグループ(歩行種別9)、データJからなるJグループ(歩行種別10)、データK1〜K3からなるKグループ(歩行種別11)、データLからなるLグループ(歩行種別12)、データM1,M2からなるMグループ(歩行種別13)の全13グループに分類されている。
【0045】
例えば、図6示すデンドログラムでは、データAはあざらしの歩行動作を、データF2はダチョウの歩行動作を、データG4はゴリラの歩行動作を、データG7はペンギンの歩行動作を、データJはうさぎの歩行動作を、データK3は熊の歩行動作を示している。
【0046】
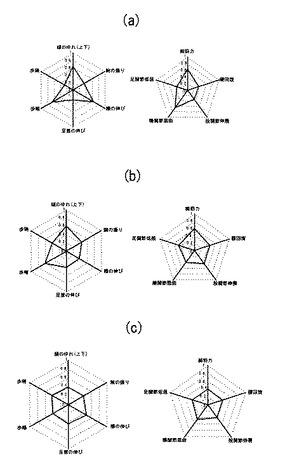
また、図7(a)はCグループに含まれるデータのレーダーチャートを、図7(b)はDグループに含まれるデータのレーダーチャートを、図7(c)はEグループに含まれるデータのレーダーチャートをそれぞれ示している。なお、図7(a),(b)において破線で示されているレーダーチャートは、上記計測データの一例を示している。
【0047】
同様に、図8(a)はFグループに含まれるデータのレーダーチャートを、図8(b)はGグループに含まれるデータのレーダーチャートを、図8(c)はHグループに含まれるデータのレーダーチャートをそれぞれ示している。
【0048】
歩行動作分類手段4は、各グループに含まれるデータを類似する歩行動作のデータであると判定し、異なるグループ間のデータを非類似の歩行動作のデータであると判定するようになっている。例えば、計測データがデータG3であれば、Gグループで表される歩行動作に分類される。したがって、このクラスタ分析の結果によって、計測データがいずれかの歩行動作に分類され、この歩行動作の分類結果(クラスタ分析の分析結果)は、表示手段5に出力される。
【0049】
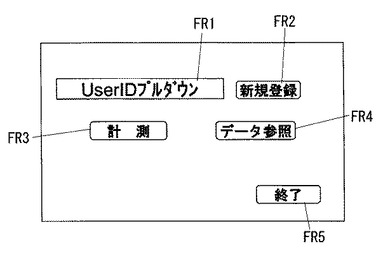
表示手段5は、画像表示装置6aに種々の画像を表示する機能を有するものであって、例えば、演算処理装置6が入力手段による動作選択を受け付ける(入力手段による指令待ちの)待ち受け状態である間、図9に示すように、入力手段により選択できる5つのフレームFR1〜FR5を有する初期画面(メイン画面)を画像表示装置6aに表示させる(初期画面表示機能)。ここで、フレームFR1は歩行動作の計測を行うユーザのユーザIDを選択するために使用されるものであって、例えば、ユーザID選択用のプルダウンメニューなどによりユーザIDの選択が行えるようになっている。フレームFR2はユーザを新規登録するために使用されるものであって、「新規登録」の文字が表示される。フレームFR3は歩行動作の計測を行うために使用されるものであって、「計測」の文字が表示される。フレームFR4は、歩行動作に関するデータを表示するために使用されるものであって、「データ参照」の文字が表示されている。フレームFR5は、歩行動作分析装置の動作を終了するためのものであって、「終了」の文字が表示される。
【0050】
フレームFR2が入力手段により選択された際には、ユーザの新規登録用の画面(図示せず)が表示される。ユーザ登録を行うにあたっては、ユーザID、名前、名前のふりがな、性別、年齢、身長、体重の入力が求められる。なお、ユーザIDは未使用のユーザIDから自動的に選択される。また、ここで入力されたユーザの性別、年齢、身長、体重などのデータは、体力特性算出手段3において体力特性を算出する際や、各体力特性の基準値を決定する際などに用いられる。
【0051】
ところで、「計測」の文字が表示されているフレームFR3が入力手段により選択された場合には、体動算出手段11に取り込み開始信号が出力され、取り込み開始信号を受け取った体動算出手段11では検出手段10からの画像の取り込みが開始されるようになっている。また、上述したようにフレームFR3が選択された際には、フレームFR3に表示される文字が「計測」から「計測終了」に変更される。そして、「計測終了」の文字が表示されているフレームFR3を選択した際には、体動算出手段11に取り込み終了信号が出力され、取り込み終了信号を受け取った体動算出手段11では検出手段10からの画像の取り込みが終了されて、取り込んだ画像データを元にして体動の算出が開始される。体動算出手段11で算出された体動は、体力特性算出手段3および歩行動作分類手段4それぞれに出力される。その結果、表示手段5には、体動測定手段1により得られた体動と、体力特性算出手段3により得られた体力特性と、歩行動作分類手段4による分類結果とが入力される。
【0052】
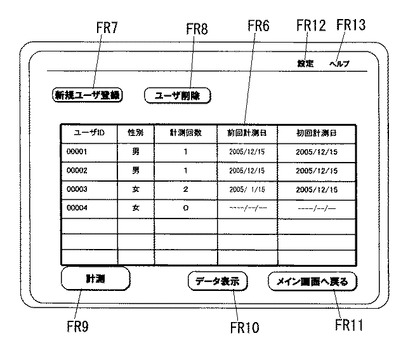
入力手段によりフレームFR4が選択された際には、表示手段5は、図10に示すように、入力手段により選択できる8つのフレームFR6〜FR13を画像表示装置6aに表示させる(データ参照画面表示機能)。ここで、フレームFR6はユーザの選択を行うためのものであって、登録されているユーザIDが表示される。また、登録されているユーザIDの情報として、その性別、計測回数、前回計測日、初回計測日が表示される。フレームFR7はユーザを新規登録するために使用されるものであって、「新規ユーザ登録」の文字が表示される。フレームFR8は登録されているユーザを削除するためのものであって、「ユーザ削除」の文字が表示される。フレームFR9はメイン画面におけるフレームFR3と同様に、歩行動作の計測を行うために使用されるものであって、「計測」の文字が表示される。フレームFR10は歩行動作の測定結果を表示するデータ表示画面を表示させるためのものであって、「データ表示」の文字が表示される。フレームFR11はメイン画面に戻るためのものであって、「メイン画面に戻る」の文字が表示される。フレームFR12は各種設定の変更を行うための設定画面(図示せず)を表示させるためのものであって、「設定」の文字が表示される。なお、設定画面では、検出手段10の画像を体動算出手段11で取り込む際のフレームレートの変更や、データ表示画面で表示する内容の変更などが行えるようになっている。設定画面で設定できる項目は使用形態に応じて適宜変更すればよい。フレームFR13はヘルプ画面(図示せず)を表示するためのものであって、「ヘルプ」の文字が表示される。なお、ヘルプ画面は操作方法などの説明を表示するためのものである。
【0053】
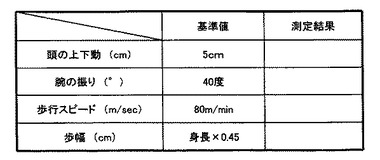
上述したデータ参照画面において、フレームFR10が選択された際には、表示手段5は、フレームFR6で選択されているユーザIDに関するデータを表示するデータ表示画面を画像表示装置6aに表示させる(判定結果表示機能)。ここで、データ表示画面としては、例えば、図11に示すような体動算出手段11で抽出したエッジ画像が人体Pの歩行動作を示すように時系列順に並べられてなる歩行動作の様子を示す画像や、図12に示すような体力特性の項目(図示例では、頭の上下動、腕の振り、歩行スピード、歩幅)と各体力特性の基準値と各体力特性の値(図示例では空欄としている)とからなる表などが挙げられる。なお、上記歩行動作の様子を示す画像は、実際には輪郭を白色で示すエッジ画像として表されるが、図11では図示の簡略化のために、白黒を反転した図としている。また、上記歩行動作の様子を示す画像は、検出手段10で実際に得られた画像の他に、歩行動作を示すモデルの画像であってもよく、要は、歩行動作の様子を示すことができる画像であればよい。
【0054】
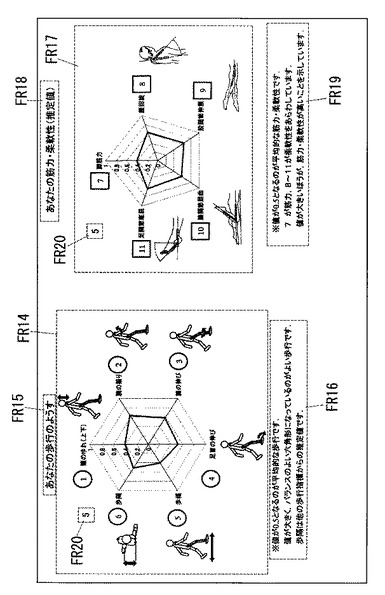
また、歩行動作の総合的な判定結果として、図13に示すようなデータ表示画面の表示が行われる。図13に示すデータ表示画面は、ユーザに判定結果を表示するためのフレームFR14〜FR20で構成されている。フレームFR14は、例えば、主として歩行動作に関係する体力特性のレーダーチャートを表示するためのものであって、例えば、頭のゆれ(上下)、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔の6つの項目の評価値からなるレーダーチャートが表示される。フレームFR15はフレームFR14に表示されるレーダーチャートの表題を表示するためのものであって、例えば、「あなたの歩行のようす」の文字が表示される。フレームFR16はフレームFR14に表示されるレーダーチャートの説明を表示するものである。フレームFR17は、例えば、主として柔軟性、平衡性、筋力などの身体能力に関係する体力特性のレーダーチャートを表示するためのものであって、例えば、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度の5つの項目の評価値からなるレーダーチャートが表示される。フレームFR18はフレームFR17に表示されるレーダーチャートの表題を表示するためのものであって、例えば、「あなたの筋力・柔軟性(推定値)」の文字が表示される。フレームFR19はフレームFR17に表示されるレーダーチャートの説明を表示するものである。また、フレームFR14,FR17それぞれには、歩行動作分類手段4の判定結果である歩行種別の番号(図示例では5)を表示するためのフレームFR20が設けられている。ここで、フレームFR20に表示させる内容としては、歩行種別の番号ではなく、歩行種別を分かり易く示した名称(例えば、ゴリラ歩き、ペンギン歩きなど)を表示するようにしてもよい。
【0055】
ところで、表示手段5は、データ表示画面を印刷する機能を有しており、演算処理装置6に接続されたプリンタ(図示せず)などの印刷装置に、データ表示画面を印刷用のデータに変換してなる信号を出力可能に構成されている。
【0056】
以上述べた歩行動作分析装置では、体動測定手段1により得られた体動と体力特性との相関関係を示すデータテーブルを参照して前記体動から体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4とを備えているから、体動測定手段1によって、歩行動作を行った際の人体Pの所定箇所の体動の測定を行うことにより、体力特性の算出および歩行動作の分類を行うことができ、また、体力特性算出手段3により算出された体力特性と歩行動作分類手段4による歩行動作の分類結果を表示する表示手段5を備えるから、体力特性と、歩行動作の分類結果とを表示できる。
【0057】
このように本実施形態の歩行動作分析装置によれば、歩行動作を行った際の人体の所定箇所の体動により身体の動作の変化を捉え、体動を元にして体力特性の算出と歩行動作の分類とを行い、体力特性と歩行動作の分類結果を歩行動作の分析結果として表示するから、このような分析結果を、身体機能の低下を改善する指標として利用することができる。
【0058】
また、体力特性算出手段3により算出された体力特性をレーダーチャートの形で表示するから、複数の体力特性を見やすく表示できるとともに、歩行動作の特徴を分かり易く表示できる。さらに、表示手段5は、体力特性算出手段3により算出された体力特性を体力特性それぞれの基準値を用いて規格化して評価値を算出し、算出した評価値を表示するから、体力特性の比較が容易になる。
【0059】
なお、本実施形態の歩行動作分析装置は、歩行動作を行った際の人体Pの複数箇所における体動を測定するものであるが、体動を測定する箇所は、複数箇所ではなく一箇所であってもよい。
【0060】
(実施形態2)
本実施形態の歩行動作分析装置は、主として体動測定手段1の検出手段10が実施形態1と異なっている。
【0061】
本実施形態における検出手段10は、実施形態1のような撮像装置ではなく、例えば、図14(a)に示すように、人体の腰部背面に装着される3軸の角速度センサ(ジャイロセンサ)からなる。以下の説明では、実施形態1で述べた撮像装置などからなる検出手段10と区別するために、本実施形態では、検出手段10を必要に応じて符号10aで示す。
【0062】
この検出手段10aは、理想的には、図14(b)に示すように、人体Pの前後方向(図14(b)において矢印Xで示す方向)、人体Pの幅方向(図14(b)において矢印Yで示す方向)、人体Pの身長方向(図14(b)において矢印Zで示す方向)それぞれが、3軸の方向となるように人体Pに装着される。なお、角速度センサとしては、MEMS(Micro Electro Mechanical Systems)技術を利用した半導体センサを用いている。
【0063】
本実施形態における体動算出手段11は、検出手段10aの出力を所定周期でサンプリングしデジタル形式に変換して体力特性算出手段3に出力するように構成されている。なお、体動算出手段11に、検出手段10aより得た各軸の角速度を、人体Pの前後方向、幅方向、身長方向それぞれの角速度に補正する機能を持たせてもよい。このようにすれば、検出手段10aの軸方向が人体Pの前後方向などからずれた状態で検出手段10aが人体Pに取り付けられたとしても、正確な角速度が得られる。
【0064】
本実施形態における体動測定手段1では、体動として、人体Pの前後方向を回転軸方向とする角速度(以下、「ロール角速度」と称する)と、人体Pの幅方向を回転軸方向とする角速度(以下、「ピッチ角速度」と称する)と、人体Pの身長方向を回転軸方向とする角速度(以下、「ヨウ角速度」と称する)とを測定するようになっている。
【0065】
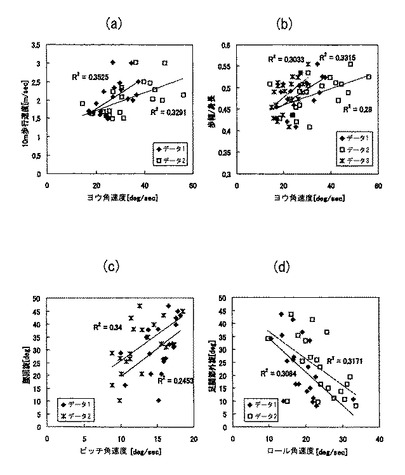
ヨウ角速度は、図15(a)に示すように、歩行速度(図示例では10m歩行速度)[m/sec]と相関がある。図15(a)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示している。また、ヨウ角速度は、図15(b)に示すように、歩幅/身長と相関がある。図15(b)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示し、データ3は被測定者が通常の歩行速度よりも遅い速度で歩いたときのグラフを示している。
【0066】
ピッチ角速度は、図15(c)に示すように、腰回旋可動域と相関がある。図15(c)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも遅い速度で歩いたときのグラフを示している。
【0067】
ロール角速度は、図15(d)に示すように、足関節外旋可動域と相関がある。図15(d)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示している。
【0068】
したがって、本実施形態における記憶手段2には、実施形態1で述べたデータテーブルに替えて、表2に示すような相関関係を示すデータテーブルが記憶されている。
【0069】
【表2】
【0070】
そして、本実施形態における体力特性算出手段3は、表2に示すような相関関係のデータテーブルを用いて、足関節外旋可動域、腰回旋可動域、10m歩行速度、歩幅を体力特性として算出するように構成されている。なお、歩幅の算出を行うにあたっては、予め登録されたユーザの身長が用いられる。
【0071】
また、体力特性算出手段3は、実施形態1と同様に、算出した体力特性(本実施形態では、足関節外旋可動域、腰回旋可動域、10m歩行速度、歩幅)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、実施形態1と同様な評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値(ただし、歩行速度はその値のみ)を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0072】
本実施形態における歩行動作分類手段4は、足関節外旋可動域、腰回旋可動域、歩幅の各評価値からなる計測データを用いて実施形態1で述べたようなクラスタ分析を行うことで、歩行動作の分類を行い、歩行動作の分類結果を表示手段5に出力するように構成されている。
【0073】
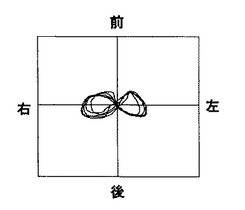
本実施形態における表示手段5において、上述のデータ表示画面に表示される内容としては、例えば、体力特性の項目(本実施形態では、足関節外旋可動域、腰回旋可動域、歩幅、10m歩行速度)と、各体力特性の基準値と、各体力特性の測定値とからなる表や、図16に示すような腰部の加速度変化を示すグラフ、上述したようなレーダーチャートを用いたものなどが挙げられる。
【0074】
以上述べた本実施形態の歩行動作分析装置によれば、実施形態1と同様の効果が得られる上に、検出手段10として角速度センサを用いるので、実施形態1のように検出手段10としてカメラなどの撮像装置を用いて人体Pの体動を測定する場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0075】
(実施形態3)
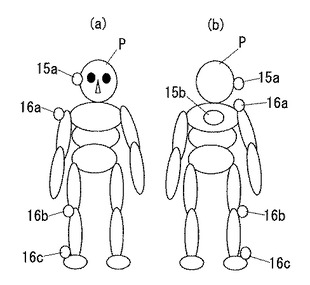
本実施形態の歩行動作分析装置は、主として体動測定手段1の検出手段10の構成が実施形態1と異なっている。すなわち、本実施形態における検出手段10は、例えば、図17(a),(b)に示すように、頭部(例えば、耳)に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサ15aと、胴体(例えば、背中)における第4脊椎(T4)近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサ15bと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサ16aと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサ16bと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサ16cと備える。なお、これら加速度センサ15a,15bや、角速度センサ16a〜16cとしてはMEMS技術を利用した半導体センサを用いている。
【0076】
本実施形態における体動算出手段11は、検出手段10を構成する加速度センサ15a,15bおよび角速度センサ16a〜16cそれぞれの出力を所定周期でサンプリングしデジタル形式に変換して体力特性算出手段3に出力するように構成されている。
【0077】
本実施形態における体力特性算出手段3は、上述の表1に示すようなデータテーブルを用いて、頭部用加速度センサ15aで検出した身体の前後方向の加速度を元にして首側屈可動域を、頭部用加速度センサ15aで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を、胴部用加速度センサ15bで検出した加速度を元にして足関節背屈可動域を、肩用角速度センサ16aで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域を、膝用角速度センサ16bで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を、足用角速度センサ16cで得られた角速度より算出した足関節伸展角度を元にして歩隔をそれぞれ算出するように構成されている。なお、体力特性算出手段3では、脚筋力および腰回旋可動域の少なくとも一方を算出するようにしてもよい。
【0078】
ところで、体力特性算出手段3は、算出した体力特性(本実施形態では、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、実施形態1と同様な評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0079】
本実施形態における歩行動作分類手段4は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度の各評価値からなる計測データを用いてクラスタ分析を行うことで、歩行動作の分類を行い、歩行動作の分類結果を表示手段5に出力するように構成されている。
【0080】
本実施形態における表示手段5において、上述のデータ表示画面に表示される内容としては、例えば、体力特性の項目(本実施形態では、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度)と、各体力特性の基準値と、各体力特性の測定値とからなる表や、上述したようなレーダーチャートを用いたものなどが挙げられる。
【0081】
以上述べた本実施形態の歩行動作分析装置によれば、実施形態1と同様の効果が得られる上に、実施形態1のように検出手段10としてカメラなどの撮像装置を用いて人体Pの体動を測定する場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0082】
なお、体動測定手段1の検出手段10は、人体Pの頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、体力特性として、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていてもよい。
【0083】
なお、体動測定手段1による体動の測定箇所は上記の例に限られるものではない。また、体力特性算出手段3により算出する体力特性も上記の例に限られるものではなく、例えば、10m歩行時間、歩幅(歩幅/身長)、歩隔(歩隔/身長)、脚脚力(脚脚力/体重)、首回旋可動域、首側屈可動域、腰回旋可動域、股関節内旋可動域、股関節外旋可動域、股関節外転可動域、股関節屈曲可動域(膝屈曲位)、股関節屈曲可動域(膝伸展位)、股関節伸展可動域(膝伸展位)、膝関節屈曲可動域、足関節底屈可動域、足関節背屈可動域、足関節内旋可動域、足関節外旋可動域などであってもよい。また、歩行動作分類手段4においてクラスタ分析に用いる体力特性も上記の例に限られるものではなく、体動を用いてクラスタ分析を行ってもよい。また、表示手段5により表示する内容も上記の例に限られるものではなく、本発明の趣旨を逸脱しない程度に変更することが可能である。
【図面の簡単な説明】
【0084】
【図1】実施形態1の歩行動作分析装置のブロック図である。
【図2】(a)は同上における歩行動作分析装置の概略説明図、(b)は同上の説明図である。
【図3】人体への反射マーカの装着位置を示す説明図である。
【図4】測定する角度の説明図である。
【図5】体動と体力特性との相関関係を示すグラフである。
【図6】歩行動作分類手段により得られるデンドログラムの説明図である。
【図7】歩行動作の分類に使用されるレーダーチャートの説明図である。
【図8】歩行動作の分類に使用されるレーダーチャートの説明図である。
【図9】歩行動作分析装置のメイン画面の説明図である。
【図10】歩行動作分析装置のデータ参照画面に説明図である。
【図11】歩行動作分析装置のデータ表示画面の説明図である。
【図12】歩行動作分析装置のデータ表示画面の説明図である。
【図13】歩行動作分析装置のデータ表示画面の説明図である。
【図14】実施形態2の検出手段の装着位置を示す説明図である。
【図15】体動と体力特性との相関関係を示すグラフである。
【図16】歩行動作分析装置のデータ表示画面の説明図である。
【図17】実施形態3の検出手段の装着位置を示す説明図である。
【符号の説明】
【0085】
1 体動測定手段
2 記憶手段
3 体力特性算出手段
4 歩行動作分類手段
5 表示手段
10(10a) 検出手段(角速度センサ)
15a 頭部用加速度センサ
15b 胴部用加速度センサ
16a 足用角速度センサ
16b 膝用角速度センサ
16c 肩用角速度センサ
【技術分野】
【0001】
本発明は、人体の歩行動作を測定してその分析結果を表示する歩行動作分析装置に関するものである。
【背景技術】
【0002】
従来から、人体の所定箇所(所定部位)の動作(体動)を測定することによって、人体の動きを検出することが行われている(例えば、特許文献1参照)。
【0003】
特許文献1には、人体の各部位に装着されたセンサから各部位の加速度または角速度を運動情報として取得し、運動情報を元にして各部位の運動強度レベルなどを算出する身体動作センシング装置が開示されている。また、特許文献1には、例えば、手術後のリハビリテーションなどにおける運動の指針として、上記運動強度レベルを採用することが開示されている。
【特許文献1】特開2001−198110号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、近年では、高齢などによる身体機能の低下を改善したいという要望が高まっている。
【0005】
しかしながら、上記特許文献1に開示された身体動作センシング装置は、単に、人体の各部位の運動強度レベルなどを算出するものであるため、手術後のリハビリテーションなどの目安に用いることはできるものの、身体機能の低下を改善するための指針を与えるものではなく、上述の要望に満足に応えることはできていなかった。
【0006】
そこで、本発明者らは、人が高齢になり身体機能が低下してくると、例えば、人体の体力特性の一種である脚力の衰えに伴って足の蹴りの力が弱くなって歩幅が減少することや、転倒を防ぐために足底の中心に重心が一致するような足運びを行うようになって所謂すり足歩行と呼ばれる歩行動作を行うようになることに着目し、身体機能の低下を改善するための指針として、体力特性と、歩行動作の分類結果とを歩行動作の分析結果として提示することに思い至った。
【0007】
本発明は上述の点に鑑みて為されたもので、その目的は、体力特性の算出と歩行動作の分類とを行えるとともに、算出した体力特性と歩行動作の分類結果とを表示できる歩行動作分析装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の問題を解決するために、請求項1の発明では、歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段と、体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段と、記憶手段に記憶されたデータテーブルを参照して体動測定手段により得られた体動から体力特性を算出する体力特性算出手段と、体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段と、体力特性算出手段により算出された体力特性および歩行動作分類手段による歩行動作の分類結果を表示する表示手段とを備えていることを特徴とする。
【0009】
請求項1の発明によれば、体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルを参照して前記体動から体力特性を算出する体力特性算出手段と、体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段とを備えているから、体動測定手段によって、歩行動作を行った際の人体の1乃至複数の部位の体動の測定を行うことにより、体力特性の算出および歩行動作の分類を行うことができ、また、体力特性算出手段により算出された体力特性と歩行動作分類手段による歩行動作の分類結果とを表示する表示手段を備えるから、体力特性と、歩行動作の分類結果とを表示できる。
【0010】
請求項2の発明では、請求項1の発明において、前記データテーブルには、体力特性を柔軟性群、平衡性群、筋力群のいずれかに分類する項目が設けられていることを特徴とする。
【0011】
請求項2の発明によれば、体力特性を項目毎に整理することが可能になる。
【0012】
請求項3の発明では、請求項1または2の発明において、体動測定手段は、人体の腰部に装着されて互いに直交する3軸を回転軸とする角速度を検出する3軸の角速度センサを備え、体力特性算出手段は、前記3軸の角速度それぞれを元にして歩幅、腰回旋可動域、および足関節外旋可動域を算出するように構成されていることを特徴とする。
【0013】
請求項3の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0014】
請求項4の発明では、請求項1または2の発明において、体動測定手段は、頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていることを特徴とする。
【0015】
請求項4の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0016】
請求項5の発明では、請求項4の発明において、体動測定手段は、頭部に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサと、胴体における第4脊椎近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサとを備え、体力特性算出手段は、頭部用加速度センサで検出した身体の前後方向の加速度を元にして首側屈可動域を算出し、頭部用加速度センサで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を算出し、胴部用加速度センサで検出した加速度を元にして足関節背屈可動域を算出し、足用角速度センサで得られた角速度より算出した足関節伸展角度を元にして歩隔を算出し、膝用角速度センサで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を算出し、肩用角速度センサで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域の少なくとも一方を算出するように構成されていることを特徴とする。
【0017】
請求項5の発明によれば、カメラなどの撮像装置を用いて人体の体動を測定するような場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0018】
請求項6の発明では、請求項1〜5のうちいずれか1項の発明において、体力特性算出手段により算出された体力特性をレーダーチャートの形で表示するように構成されていることを特徴とする。
【0019】
請求項6の発明によれば、複数の体力特性を見やすく表示できるとともに、歩行動作の特徴を分かり易く表示できる。
【0020】
請求項7の発明によれば、請求項1〜6のうちいずれか1項の発明において、表示手段は、体力特性算出手段により算出された体力特性をその基準値を用いて規格化して評価値を算出し、算出した評価値を表示するように構成されていることを特徴とする。
【0021】
請求項7の発明によれば、体力特性の比較が容易になる。
【発明の効果】
【0022】
本発明は、体力特性の算出と歩行動作の分類を行うことができ、また、体力特性と歩行動作の分類結果とを表示できる。
【発明を実施するための最良の形態】
【0023】
(実施形態1)
本実施形態の歩行動作分析装置は、歩行動作を行った際の人体Pの複数箇所における体動を測定して、その測定結果を元にして人体Pの歩行動作を分析するものであって、分析結果として、体力特性と歩行動作の分類結果を表示するように構成されている。
【0024】
歩行動作分析装置は、図2(a)に示すように、測定対象の人が歩行する計測エリア12を撮像範囲に含むビデオカメラなどの撮像装置からなる検出手段10と、検出手段10に接続された演算処理装置6とで構成されている。なお、計測エリア12は、例えば、長さが10m、幅が2mの矩形状のエリアである。また、撮像装置に用いられるビデオカメラとしては、例えば、IEEE1394対応のビデオカメラを用いることができる。
【0025】
演算処理装置6は、例えば、パソコンなどであって、人体P(図3(a),(b)参照)の所定箇所(動作計測箇所)における体動と体力特性(体力測定項目)との相関関係を示すデータテーブルが記憶されたハードディスクなどの記憶手段2(図1参照)と、液晶ディスプレイ(LCD)などの画像表示装置6a(図2(a)参照)と、キーボードなどのユーザインタフェースからなる入力手段(図示せず)とをハードウェアとして備えている。
【0026】
また、演算処理装置6は、図1に示すように、検出手段10より得られた画像を元にして歩行動作を行った際の人体Pの所定部位における体動を算出する体動算出手段11をソフトウェアとして備えており、この体動算出手段11と検出手段10とによって、歩行動作を行った際の人体Pの1乃至複数の部位における体動を測定する体動測定手段1が構成されている。
【0027】
加えて、演算処理装置6は、図1に示すように、記憶手段2に記憶されたデータテーブルを参照して体動測定手段1により得られた体動から人体Pの体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4と、体力特性算出手段3により算出した体力特性および歩行動作分類手段4による歩行動作の分類結果を画像表示装置6aに表示する表示手段5とをソフトウェアとして備えている。
【0028】
本実施形態における体動測定手段1は、画像処理により体動を測定するものであって、体動の測定を行うにあたっては、計測エリア12内には、図2(a),(b)に示すように、基準マーカ(キャリブレーション)13が、計測エリア12の長さ方向(人体Pの移動方向)に沿った方向に所定間隔を隔てて設置される。基準マーカ13は、検出手段10により得られた画像上の座標、すなわち人体Pの前後方向(水平方向)と、身長方向(鉛直方向)の2次元座標を実空間上の座標(2次元座標)に変換するための座標変換用データテーブルの作成に用いられる。
【0029】
ところで、人体Pには、体動の測定を行う際の目安となる反射マーカ14が取り付けられる。反射マーカ14は、検出手段10により得られた画像上において、人体Pの皮膚や着衣の色と識別できる色のものが用いられる。ここで、反射マーカ14の取り付け位置は、測定する体動の種類によって決定される。例えば、本実施形態では、体動として、頭部の加速度と、足関節角度、膝関節屈曲角度、股関節角度(大腿の振りの角度)、肩関節角度(腕の振りの角度)とを測定するために、図3(a),(b)および図4に示すように、反射マーカ14を人体Pの頭部、肩関節、肘関節、股関節、膝関節、足関節、爪先の7箇所に取り付ける。なお、以下の説明では、人体Pに取り付けられた位置で反射マーカ14を区別するために、必要に応じて反射マーカ14を符号14a〜14gで示す。
【0030】
体動算出手段11は、所定のフレームレート、例えば、30FPS(Frames PerSeconds)で検出手段10より時系列順に連続した画像を取り込むように構成されている。体動算出手段11は、検出手段10より取り込んだ画像を画像処理して各反射マーカ14の画像のみを抽出し、各反射マーカ14の重心位置を算出することで、画像上における各反射マーカ14の2次元座標を得る。そして、演算処理装置12は、画像上における各反射マーカ14の2次元座標を、前記座標変換用データテーブルを用いて、実空間上の座標に変換する。なお、上述の実空間上の座標への変換は、例えば、DLT法などを用いて実現することができる(池上康夫:「写真撮影による運動の三次元的解析法」,Japanese Journal of Sports Sciences,2-8,pp163-170,1983参照)。
【0031】
体動算出手段11は、各反射マーカ14の位置変化(実空間上に変換された各反射マーカ14の2次元座標の変化)に基づいて、人体Pにおいて反射マーカ14が取り付けられた部位の体動、例えば、速度、加速度などを求める。
【0032】
加えて、体動算出手段11は、反射マーカ14の位置変化に基づいて、人体Pの体動として、例えば、各関節の角度(屈曲角度や、伸展角度)を求める。本実施形態では、足関節角度、膝関節屈曲角度、股関節角度(大腿の振りの角度)、肩関節角度(腕の振りの角度)を求め、これら関節角度の最大値または最小値が人体Pの体動として用いられる。
【0033】
ここで、足関節角度は、図4に示すように、爪先に取り付けられた反射マーカ14gおよび足関節に取り付けられた反射マーカ14fを結ぶ直線L1と、膝関節に取り付けられた反射マーカ14eと反射マーカ14fを結ぶ直線L2との間の角度θ1で表される。膝関節角度は、股関節に取り付けられた反射マーカ14dおよび反射マーカ14eを結ぶ直線L3と直線L2と間の角度θ2で表される。股関節角度は、股関節に取り付けられた反射マーカ14dを通る鉛直線V1と直線L3との間の角度θ3で表される。肩関節角度は、肩関節に取り付けられた反射マーカ14bを通る鉛直線V2と、肘関節に取り付けられた反射マーカ14cおよび反射マーカ14bを結ぶ直線L4との間の角度θ4で表される。ところで、本実施形態では、角度θ1〜θ4などの角度を度数法により示しており、角度θ3,θ4については、人体Pの前方側(図4における右方側)を正方向とし、後方側(図4における左方側)を負方向としている。なお、角度の値を弧度法により示してもよい。
【0034】
体動算出手段11により得られた各体動は、体力特性算出手段3および歩行動作分類手段4それぞれに出力される。
【0035】
ところで、体動算出手段11では、検出手段10からのデータの取り込み開始時刻と、取り込み終了時刻とを計時しており、取り込み開始時刻と取り込み終了時刻との時間差を計測時間として算出するように構成されている。また、体動算出手段11は、検出手段10から得た画像を元にして輪郭画像(エッジ画像)を作成するように構成されている。なお、エッジ画像の作成方法は従来周知のものを採用できるから詳細な説明は省略する。
【0036】
体力特性算出手段3は、体動算出手段11により得られた各体動を元に所定の体力特性を算出するものであり、例えば、体動として、頭のゆれ(頭の上下動)、腕の振り(肩関節可動域)、膝の伸び(膝関伸展最大角度)、足首の伸び(足関節伸展最大角度)、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度、歩行速度(歩行スピード)の算出を行う。
【0037】
ここで、頭のゆれは、実空間上の反射マーカ14aの2次元座標の時間変化を元にして算出される。例えば、反射マーカ14aの鉛直方向における最大値と最小値との差分で与えられる。腕の振りは、上述した角度θ3の最大値と最小値との差分で与えられる。膝の伸びは、上述した角度θ2の最大値で与えられる。足首の伸びは、上述した角度θ1の最大値で与えられる。歩幅および歩行速度は、足関節(足首)に取り付けられた反射マーカ14fあるいは爪先に取り付けられた反射マーカ14gの加速度の極大値間あるいは極小値間の時間間隔およびそのときの人体Pの進行方向における距離から求められる。股関節伸展最大角度は、角度θ3の最小値(角度θ3の負の最大値)の絶対値で与えられる。膝関節屈曲最小角度は、角度θ2の最小値で与えられる。足関節伸展(底屈)最大角度は、角度θ1の最大値で与えられる。
【0038】
ところで、歩隔、脚筋力、腰回旋可動域などは、体動の値より直接的に算出することができない。そのため、これらの体力特性の値を算出するにあたっては、記憶手段2に記憶されているデータテーブルが用いられる。このデータテーブルは、例えば、下記の表1に示すような相関関係を示すものであって、足関節伸展最大角度、すなわち角度θ1の最大値から歩隔/身長を求めることができる。また、上腕前方最大角度、すなわち角度θ4の最大値から脚筋力/体重および腰回旋可動域を求めることができる。なお、歩隔および脚筋力を算出するにあたっては、登録されているユーザの身長および体重がそれぞれ用いられる。
【0039】
ところで、データテーブルにおいて右側に設けられた体柔軟性、脚柔軟性、柔軟性・平衡性、筋力、体幹柔軟性などの項目は、体力特性が、柔軟性群、平衡性群、筋力群のいずれに分類されるかを示している。したがって、このデータテーブルによれば、体力特性を用いて柔軟性、平衡性、筋力などの評価が行え、また、体力特性を項目毎に整理することが可能になる。
【0040】
上述したようなデータテーブルを利用することによって、体動から直接的に算出することができない体力特性であっても、体力特性を算出することが可能となる。なお、データテーブルは、例えば、図5(a)〜(d)に示すように、複数の人について、体動と、体力特性とを測定し、最小二乗法などにより体動に対する体力特性の近似式を算出することなどによって得ることができる。
【0041】
【表1】
【0042】
ところで、体力特性算出手段3は、算出した体力特性(本実施形態では、頭のゆれ、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、例えば、体力特性の値が基準値に等しいときに0.5となるような評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値(ただし、歩行速度はその値のみ)を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0043】
歩行動作分類手段4は、体動測定手段1により得られた体動を元にして歩行動作の分類を行うものであって、本実施形態では、体動測定手段1により得られた体動を元にして体力特性算出手段3により算出された体力特性を用いて歩行動作の分類を行うように構成されている。歩行動作分類手段4は、歩行動作の分類を行うにあたっては、頭のゆれ、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度の各評価値からなる計測データと、歩行動作を分類するために用いられる複数のサンプルデータとを用いてクラスタ分析を行う。なお、上記サンプルデータは、例えば、種々の歩行動作を行った際の人体の体動や、動物(例えば、ゴリラ、熊)などの歩行動作を元に測定した体動などを元にして作成することができ、サンプルデータの数が多ければ多いほど、詳細な分類が可能となる。
【0044】
クラスタ分析によれば、例えば、図6に示すようなデンドログラム(樹形図)が得られる。なお、クラスタ分析は、従来周知の分析手法であるから、詳細な説明は省略する。図6に示すデンドログラムは、例えば、1つの計測データと44種類のサンプルデータの全45種類のデータを用いてクラスタ分析を行ったものであって、45種類のデータが、データAからなるAグループ(歩行種別1)、データB1〜B3からなるBグループ(歩行種別2)、データC1〜C6からなるCグループ(歩行種別3)、データD1〜D5からなるDグループ(歩行種別4)、データE1〜E7からなるEグループ(歩行種別5)、データF1,F2からなるFグループ(歩行種別6)、データG1〜G8からなるGグループ(歩行種別7)、データH1〜H5からなるHグループ(歩行種別8)、データIからなるIグループ(歩行種別9)、データJからなるJグループ(歩行種別10)、データK1〜K3からなるKグループ(歩行種別11)、データLからなるLグループ(歩行種別12)、データM1,M2からなるMグループ(歩行種別13)の全13グループに分類されている。
【0045】
例えば、図6示すデンドログラムでは、データAはあざらしの歩行動作を、データF2はダチョウの歩行動作を、データG4はゴリラの歩行動作を、データG7はペンギンの歩行動作を、データJはうさぎの歩行動作を、データK3は熊の歩行動作を示している。
【0046】
また、図7(a)はCグループに含まれるデータのレーダーチャートを、図7(b)はDグループに含まれるデータのレーダーチャートを、図7(c)はEグループに含まれるデータのレーダーチャートをそれぞれ示している。なお、図7(a),(b)において破線で示されているレーダーチャートは、上記計測データの一例を示している。
【0047】
同様に、図8(a)はFグループに含まれるデータのレーダーチャートを、図8(b)はGグループに含まれるデータのレーダーチャートを、図8(c)はHグループに含まれるデータのレーダーチャートをそれぞれ示している。
【0048】
歩行動作分類手段4は、各グループに含まれるデータを類似する歩行動作のデータであると判定し、異なるグループ間のデータを非類似の歩行動作のデータであると判定するようになっている。例えば、計測データがデータG3であれば、Gグループで表される歩行動作に分類される。したがって、このクラスタ分析の結果によって、計測データがいずれかの歩行動作に分類され、この歩行動作の分類結果(クラスタ分析の分析結果)は、表示手段5に出力される。
【0049】
表示手段5は、画像表示装置6aに種々の画像を表示する機能を有するものであって、例えば、演算処理装置6が入力手段による動作選択を受け付ける(入力手段による指令待ちの)待ち受け状態である間、図9に示すように、入力手段により選択できる5つのフレームFR1〜FR5を有する初期画面(メイン画面)を画像表示装置6aに表示させる(初期画面表示機能)。ここで、フレームFR1は歩行動作の計測を行うユーザのユーザIDを選択するために使用されるものであって、例えば、ユーザID選択用のプルダウンメニューなどによりユーザIDの選択が行えるようになっている。フレームFR2はユーザを新規登録するために使用されるものであって、「新規登録」の文字が表示される。フレームFR3は歩行動作の計測を行うために使用されるものであって、「計測」の文字が表示される。フレームFR4は、歩行動作に関するデータを表示するために使用されるものであって、「データ参照」の文字が表示されている。フレームFR5は、歩行動作分析装置の動作を終了するためのものであって、「終了」の文字が表示される。
【0050】
フレームFR2が入力手段により選択された際には、ユーザの新規登録用の画面(図示せず)が表示される。ユーザ登録を行うにあたっては、ユーザID、名前、名前のふりがな、性別、年齢、身長、体重の入力が求められる。なお、ユーザIDは未使用のユーザIDから自動的に選択される。また、ここで入力されたユーザの性別、年齢、身長、体重などのデータは、体力特性算出手段3において体力特性を算出する際や、各体力特性の基準値を決定する際などに用いられる。
【0051】
ところで、「計測」の文字が表示されているフレームFR3が入力手段により選択された場合には、体動算出手段11に取り込み開始信号が出力され、取り込み開始信号を受け取った体動算出手段11では検出手段10からの画像の取り込みが開始されるようになっている。また、上述したようにフレームFR3が選択された際には、フレームFR3に表示される文字が「計測」から「計測終了」に変更される。そして、「計測終了」の文字が表示されているフレームFR3を選択した際には、体動算出手段11に取り込み終了信号が出力され、取り込み終了信号を受け取った体動算出手段11では検出手段10からの画像の取り込みが終了されて、取り込んだ画像データを元にして体動の算出が開始される。体動算出手段11で算出された体動は、体力特性算出手段3および歩行動作分類手段4それぞれに出力される。その結果、表示手段5には、体動測定手段1により得られた体動と、体力特性算出手段3により得られた体力特性と、歩行動作分類手段4による分類結果とが入力される。
【0052】
入力手段によりフレームFR4が選択された際には、表示手段5は、図10に示すように、入力手段により選択できる8つのフレームFR6〜FR13を画像表示装置6aに表示させる(データ参照画面表示機能)。ここで、フレームFR6はユーザの選択を行うためのものであって、登録されているユーザIDが表示される。また、登録されているユーザIDの情報として、その性別、計測回数、前回計測日、初回計測日が表示される。フレームFR7はユーザを新規登録するために使用されるものであって、「新規ユーザ登録」の文字が表示される。フレームFR8は登録されているユーザを削除するためのものであって、「ユーザ削除」の文字が表示される。フレームFR9はメイン画面におけるフレームFR3と同様に、歩行動作の計測を行うために使用されるものであって、「計測」の文字が表示される。フレームFR10は歩行動作の測定結果を表示するデータ表示画面を表示させるためのものであって、「データ表示」の文字が表示される。フレームFR11はメイン画面に戻るためのものであって、「メイン画面に戻る」の文字が表示される。フレームFR12は各種設定の変更を行うための設定画面(図示せず)を表示させるためのものであって、「設定」の文字が表示される。なお、設定画面では、検出手段10の画像を体動算出手段11で取り込む際のフレームレートの変更や、データ表示画面で表示する内容の変更などが行えるようになっている。設定画面で設定できる項目は使用形態に応じて適宜変更すればよい。フレームFR13はヘルプ画面(図示せず)を表示するためのものであって、「ヘルプ」の文字が表示される。なお、ヘルプ画面は操作方法などの説明を表示するためのものである。
【0053】
上述したデータ参照画面において、フレームFR10が選択された際には、表示手段5は、フレームFR6で選択されているユーザIDに関するデータを表示するデータ表示画面を画像表示装置6aに表示させる(判定結果表示機能)。ここで、データ表示画面としては、例えば、図11に示すような体動算出手段11で抽出したエッジ画像が人体Pの歩行動作を示すように時系列順に並べられてなる歩行動作の様子を示す画像や、図12に示すような体力特性の項目(図示例では、頭の上下動、腕の振り、歩行スピード、歩幅)と各体力特性の基準値と各体力特性の値(図示例では空欄としている)とからなる表などが挙げられる。なお、上記歩行動作の様子を示す画像は、実際には輪郭を白色で示すエッジ画像として表されるが、図11では図示の簡略化のために、白黒を反転した図としている。また、上記歩行動作の様子を示す画像は、検出手段10で実際に得られた画像の他に、歩行動作を示すモデルの画像であってもよく、要は、歩行動作の様子を示すことができる画像であればよい。
【0054】
また、歩行動作の総合的な判定結果として、図13に示すようなデータ表示画面の表示が行われる。図13に示すデータ表示画面は、ユーザに判定結果を表示するためのフレームFR14〜FR20で構成されている。フレームFR14は、例えば、主として歩行動作に関係する体力特性のレーダーチャートを表示するためのものであって、例えば、頭のゆれ(上下)、腕の振り、膝の伸び、足首の伸び、歩幅、歩隔の6つの項目の評価値からなるレーダーチャートが表示される。フレームFR15はフレームFR14に表示されるレーダーチャートの表題を表示するためのものであって、例えば、「あなたの歩行のようす」の文字が表示される。フレームFR16はフレームFR14に表示されるレーダーチャートの説明を表示するものである。フレームFR17は、例えば、主として柔軟性、平衡性、筋力などの身体能力に関係する体力特性のレーダーチャートを表示するためのものであって、例えば、脚筋力、腰回旋可動域、股関節伸展最大角度、膝関節屈曲最大角度、足関節底屈最大角度の5つの項目の評価値からなるレーダーチャートが表示される。フレームFR18はフレームFR17に表示されるレーダーチャートの表題を表示するためのものであって、例えば、「あなたの筋力・柔軟性(推定値)」の文字が表示される。フレームFR19はフレームFR17に表示されるレーダーチャートの説明を表示するものである。また、フレームFR14,FR17それぞれには、歩行動作分類手段4の判定結果である歩行種別の番号(図示例では5)を表示するためのフレームFR20が設けられている。ここで、フレームFR20に表示させる内容としては、歩行種別の番号ではなく、歩行種別を分かり易く示した名称(例えば、ゴリラ歩き、ペンギン歩きなど)を表示するようにしてもよい。
【0055】
ところで、表示手段5は、データ表示画面を印刷する機能を有しており、演算処理装置6に接続されたプリンタ(図示せず)などの印刷装置に、データ表示画面を印刷用のデータに変換してなる信号を出力可能に構成されている。
【0056】
以上述べた歩行動作分析装置では、体動測定手段1により得られた体動と体力特性との相関関係を示すデータテーブルを参照して前記体動から体力特性を算出する体力特性算出手段3と、体動測定手段1により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段4とを備えているから、体動測定手段1によって、歩行動作を行った際の人体Pの所定箇所の体動の測定を行うことにより、体力特性の算出および歩行動作の分類を行うことができ、また、体力特性算出手段3により算出された体力特性と歩行動作分類手段4による歩行動作の分類結果を表示する表示手段5を備えるから、体力特性と、歩行動作の分類結果とを表示できる。
【0057】
このように本実施形態の歩行動作分析装置によれば、歩行動作を行った際の人体の所定箇所の体動により身体の動作の変化を捉え、体動を元にして体力特性の算出と歩行動作の分類とを行い、体力特性と歩行動作の分類結果を歩行動作の分析結果として表示するから、このような分析結果を、身体機能の低下を改善する指標として利用することができる。
【0058】
また、体力特性算出手段3により算出された体力特性をレーダーチャートの形で表示するから、複数の体力特性を見やすく表示できるとともに、歩行動作の特徴を分かり易く表示できる。さらに、表示手段5は、体力特性算出手段3により算出された体力特性を体力特性それぞれの基準値を用いて規格化して評価値を算出し、算出した評価値を表示するから、体力特性の比較が容易になる。
【0059】
なお、本実施形態の歩行動作分析装置は、歩行動作を行った際の人体Pの複数箇所における体動を測定するものであるが、体動を測定する箇所は、複数箇所ではなく一箇所であってもよい。
【0060】
(実施形態2)
本実施形態の歩行動作分析装置は、主として体動測定手段1の検出手段10が実施形態1と異なっている。
【0061】
本実施形態における検出手段10は、実施形態1のような撮像装置ではなく、例えば、図14(a)に示すように、人体の腰部背面に装着される3軸の角速度センサ(ジャイロセンサ)からなる。以下の説明では、実施形態1で述べた撮像装置などからなる検出手段10と区別するために、本実施形態では、検出手段10を必要に応じて符号10aで示す。
【0062】
この検出手段10aは、理想的には、図14(b)に示すように、人体Pの前後方向(図14(b)において矢印Xで示す方向)、人体Pの幅方向(図14(b)において矢印Yで示す方向)、人体Pの身長方向(図14(b)において矢印Zで示す方向)それぞれが、3軸の方向となるように人体Pに装着される。なお、角速度センサとしては、MEMS(Micro Electro Mechanical Systems)技術を利用した半導体センサを用いている。
【0063】
本実施形態における体動算出手段11は、検出手段10aの出力を所定周期でサンプリングしデジタル形式に変換して体力特性算出手段3に出力するように構成されている。なお、体動算出手段11に、検出手段10aより得た各軸の角速度を、人体Pの前後方向、幅方向、身長方向それぞれの角速度に補正する機能を持たせてもよい。このようにすれば、検出手段10aの軸方向が人体Pの前後方向などからずれた状態で検出手段10aが人体Pに取り付けられたとしても、正確な角速度が得られる。
【0064】
本実施形態における体動測定手段1では、体動として、人体Pの前後方向を回転軸方向とする角速度(以下、「ロール角速度」と称する)と、人体Pの幅方向を回転軸方向とする角速度(以下、「ピッチ角速度」と称する)と、人体Pの身長方向を回転軸方向とする角速度(以下、「ヨウ角速度」と称する)とを測定するようになっている。
【0065】
ヨウ角速度は、図15(a)に示すように、歩行速度(図示例では10m歩行速度)[m/sec]と相関がある。図15(a)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示している。また、ヨウ角速度は、図15(b)に示すように、歩幅/身長と相関がある。図15(b)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示し、データ3は被測定者が通常の歩行速度よりも遅い速度で歩いたときのグラフを示している。
【0066】
ピッチ角速度は、図15(c)に示すように、腰回旋可動域と相関がある。図15(c)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも遅い速度で歩いたときのグラフを示している。
【0067】
ロール角速度は、図15(d)に示すように、足関節外旋可動域と相関がある。図15(d)に示すグラフにおいて、データ1は、被測定者が通常の歩行速度で歩いたときのグラフを示し、データ2は被測定者が通常の歩行速度よりも速い速度で歩いたときのグラフを示している。
【0068】
したがって、本実施形態における記憶手段2には、実施形態1で述べたデータテーブルに替えて、表2に示すような相関関係を示すデータテーブルが記憶されている。
【0069】
【表2】
【0070】
そして、本実施形態における体力特性算出手段3は、表2に示すような相関関係のデータテーブルを用いて、足関節外旋可動域、腰回旋可動域、10m歩行速度、歩幅を体力特性として算出するように構成されている。なお、歩幅の算出を行うにあたっては、予め登録されたユーザの身長が用いられる。
【0071】
また、体力特性算出手段3は、実施形態1と同様に、算出した体力特性(本実施形態では、足関節外旋可動域、腰回旋可動域、10m歩行速度、歩幅)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、実施形態1と同様な評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値(ただし、歩行速度はその値のみ)を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0072】
本実施形態における歩行動作分類手段4は、足関節外旋可動域、腰回旋可動域、歩幅の各評価値からなる計測データを用いて実施形態1で述べたようなクラスタ分析を行うことで、歩行動作の分類を行い、歩行動作の分類結果を表示手段5に出力するように構成されている。
【0073】
本実施形態における表示手段5において、上述のデータ表示画面に表示される内容としては、例えば、体力特性の項目(本実施形態では、足関節外旋可動域、腰回旋可動域、歩幅、10m歩行速度)と、各体力特性の基準値と、各体力特性の測定値とからなる表や、図16に示すような腰部の加速度変化を示すグラフ、上述したようなレーダーチャートを用いたものなどが挙げられる。
【0074】
以上述べた本実施形態の歩行動作分析装置によれば、実施形態1と同様の効果が得られる上に、検出手段10として角速度センサを用いるので、実施形態1のように検出手段10としてカメラなどの撮像装置を用いて人体Pの体動を測定する場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0075】
(実施形態3)
本実施形態の歩行動作分析装置は、主として体動測定手段1の検出手段10の構成が実施形態1と異なっている。すなわち、本実施形態における検出手段10は、例えば、図17(a),(b)に示すように、頭部(例えば、耳)に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサ15aと、胴体(例えば、背中)における第4脊椎(T4)近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサ15bと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサ16aと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサ16bと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサ16cと備える。なお、これら加速度センサ15a,15bや、角速度センサ16a〜16cとしてはMEMS技術を利用した半導体センサを用いている。
【0076】
本実施形態における体動算出手段11は、検出手段10を構成する加速度センサ15a,15bおよび角速度センサ16a〜16cそれぞれの出力を所定周期でサンプリングしデジタル形式に変換して体力特性算出手段3に出力するように構成されている。
【0077】
本実施形態における体力特性算出手段3は、上述の表1に示すようなデータテーブルを用いて、頭部用加速度センサ15aで検出した身体の前後方向の加速度を元にして首側屈可動域を、頭部用加速度センサ15aで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を、胴部用加速度センサ15bで検出した加速度を元にして足関節背屈可動域を、肩用角速度センサ16aで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域を、膝用角速度センサ16bで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を、足用角速度センサ16cで得られた角速度より算出した足関節伸展角度を元にして歩隔をそれぞれ算出するように構成されている。なお、体力特性算出手段3では、脚筋力および腰回旋可動域の少なくとも一方を算出するようにしてもよい。
【0078】
ところで、体力特性算出手段3は、算出した体力特性(本実施形態では、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度)の値をその基準値(体力特性毎に設定された基準値)を用いて正規化することによって、実施形態1と同様な評価値に変換するように構成されている。そして、体力特性算出手段3は、各体力特性の値および評価値を歩行動作分類手段4および表示手段5の両方に出力するように構成されている。
【0079】
本実施形態における歩行動作分類手段4は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度の各評価値からなる計測データを用いてクラスタ分析を行うことで、歩行動作の分類を行い、歩行動作の分類結果を表示手段5に出力するように構成されている。
【0080】
本実施形態における表示手段5において、上述のデータ表示画面に表示される内容としては、例えば、体力特性の項目(本実施形態では、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、脚筋力、腰回旋可動域、足関節底屈可動域、足関節伸展角度)と、各体力特性の基準値と、各体力特性の測定値とからなる表や、上述したようなレーダーチャートを用いたものなどが挙げられる。
【0081】
以上述べた本実施形態の歩行動作分析装置によれば、実施形態1と同様の効果が得られる上に、実施形態1のように検出手段10としてカメラなどの撮像装置を用いて人体Pの体動を測定する場合とは異なり、歩行動作を行う範囲が撮像装置の撮像範囲に限られることがないから、歩行動作が広範囲に亘って行われた際でも体動の測定が行える。
【0082】
なお、体動測定手段1の検出手段10は、人体Pの頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、体力特性として、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていてもよい。
【0083】
なお、体動測定手段1による体動の測定箇所は上記の例に限られるものではない。また、体力特性算出手段3により算出する体力特性も上記の例に限られるものではなく、例えば、10m歩行時間、歩幅(歩幅/身長)、歩隔(歩隔/身長)、脚脚力(脚脚力/体重)、首回旋可動域、首側屈可動域、腰回旋可動域、股関節内旋可動域、股関節外旋可動域、股関節外転可動域、股関節屈曲可動域(膝屈曲位)、股関節屈曲可動域(膝伸展位)、股関節伸展可動域(膝伸展位)、膝関節屈曲可動域、足関節底屈可動域、足関節背屈可動域、足関節内旋可動域、足関節外旋可動域などであってもよい。また、歩行動作分類手段4においてクラスタ分析に用いる体力特性も上記の例に限られるものではなく、体動を用いてクラスタ分析を行ってもよい。また、表示手段5により表示する内容も上記の例に限られるものではなく、本発明の趣旨を逸脱しない程度に変更することが可能である。
【図面の簡単な説明】
【0084】
【図1】実施形態1の歩行動作分析装置のブロック図である。
【図2】(a)は同上における歩行動作分析装置の概略説明図、(b)は同上の説明図である。
【図3】人体への反射マーカの装着位置を示す説明図である。
【図4】測定する角度の説明図である。
【図5】体動と体力特性との相関関係を示すグラフである。
【図6】歩行動作分類手段により得られるデンドログラムの説明図である。
【図7】歩行動作の分類に使用されるレーダーチャートの説明図である。
【図8】歩行動作の分類に使用されるレーダーチャートの説明図である。
【図9】歩行動作分析装置のメイン画面の説明図である。
【図10】歩行動作分析装置のデータ参照画面に説明図である。
【図11】歩行動作分析装置のデータ表示画面の説明図である。
【図12】歩行動作分析装置のデータ表示画面の説明図である。
【図13】歩行動作分析装置のデータ表示画面の説明図である。
【図14】実施形態2の検出手段の装着位置を示す説明図である。
【図15】体動と体力特性との相関関係を示すグラフである。
【図16】歩行動作分析装置のデータ表示画面の説明図である。
【図17】実施形態3の検出手段の装着位置を示す説明図である。
【符号の説明】
【0085】
1 体動測定手段
2 記憶手段
3 体力特性算出手段
4 歩行動作分類手段
5 表示手段
10(10a) 検出手段(角速度センサ)
15a 頭部用加速度センサ
15b 胴部用加速度センサ
16a 足用角速度センサ
16b 膝用角速度センサ
16c 肩用角速度センサ
【特許請求の範囲】
【請求項1】
歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段と、
体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段と、
記憶手段に記憶されたデータテーブルを参照して体動測定手段により得られた体動から体力特性を算出する体力特性算出手段と、
体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段と、
体力特性算出手段により算出された体力特性および歩行動作分類手段による歩行動作の分類結果を表示する表示手段とを備えていることを特徴とする歩行動作分析装置。
【請求項2】
前記データテーブルには、体力特性を柔軟性群、平衡性群、筋力群のいずれかに分類する項目が設けられていることを特徴とする請求項1記載の歩行動作分析装置。
【請求項3】
体動測定手段は、人体の腰部に装着されて互いに直交する3軸を回転軸とする角速度を検出する3軸の角速度センサを備え、体力特性算出手段は、前記3軸の角速度それぞれを元にして歩幅、腰回旋可動域、および足関節外旋可動域を算出するように構成されていることを特徴とする請求項1または2記載の歩行動作分析装置。
【請求項4】
体動測定手段は、頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていることを特徴とする請求項1または2記載の歩行動作分析装置。
【請求項5】
体動測定手段は、頭部に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサと、胴体における第4脊椎近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサとを備え、
体力特性算出手段は、頭部用加速度センサで検出した身体の前後方向の加速度を元にして首側屈可動域を算出し、頭部用加速度センサで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を算出し、胴部用加速度センサで検出した加速度を元にして足関節背屈可動域を算出し、足用角速度センサで得られた角速度より算出した足関節伸展角度を元にして歩隔を算出し、膝用角速度センサで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を算出し、肩用角速度センサで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域の少なくとも一方を算出するように構成されていることを特徴とする請求項4記載の歩行動作分析装置。
【請求項6】
表示手段は、体力特性算出手段により算出された体力特性をレーダーチャートの形で表示するように構成されていることを特徴とする請求項1〜5のうちいずれか1項記載の歩行動作分析装置。
【請求項7】
表示手段は、体力特性算出手段により算出された体力特性をその基準値を用いて規格化して評価値を算出し、算出した評価値を表示するように構成されていることを特徴とする請求項1〜6のうちいずれか1項記載の歩行動作分析装置。
【請求項1】
歩行動作を行った際の人体の1乃至複数の部位における体動を測定する体動測定手段と、
体動測定手段により得られた体動と体力特性との相関関係を示すデータテーブルが記憶された記憶手段と、
記憶手段に記憶されたデータテーブルを参照して体動測定手段により得られた体動から体力特性を算出する体力特性算出手段と、
体動測定手段により得られた体動を元にしてクラスタ分析を行うことにより歩行動作の分類を行う歩行動作分類手段と、
体力特性算出手段により算出された体力特性および歩行動作分類手段による歩行動作の分類結果を表示する表示手段とを備えていることを特徴とする歩行動作分析装置。
【請求項2】
前記データテーブルには、体力特性を柔軟性群、平衡性群、筋力群のいずれかに分類する項目が設けられていることを特徴とする請求項1記載の歩行動作分析装置。
【請求項3】
体動測定手段は、人体の腰部に装着されて互いに直交する3軸を回転軸とする角速度を検出する3軸の角速度センサを備え、体力特性算出手段は、前記3軸の角速度それぞれを元にして歩幅、腰回旋可動域、および足関節外旋可動域を算出するように構成されていることを特徴とする請求項1または2記載の歩行動作分析装置。
【請求項4】
体動測定手段は、頭部、背中、足関節、膝関節、および肩関節の少なくとも1箇所に装着された加速度センサまたは角速度センサを備え、体力特性算出手段は、首側屈可動域、股関節屈曲可動域、足関節背屈可動域、歩幅、足関節底屈可動域、脚筋力、腰回旋可動域の少なくとも1つを算出するように構成されていることを特徴とする請求項1または2記載の歩行動作分析装置。
【請求項5】
体動測定手段は、頭部に装着され身体の前後方向および身長方向における頭部の加速度を検出する頭部用加速度センサと、胴体における第4脊椎近傍に装着され身体の前後方向の加速度を検出する胴部用加速度センサと、足関節近傍に装着され身体の幅方向を回転軸方向とする足の角速度を検出する足用角速度センサと、膝関節近傍に装着され身体の幅方向を回転軸とする下肢の角速度を検出する膝用角速度センサと、肩関節近傍に装着され身体の幅方向を回転軸とする上腕の角速度を検出する肩用角速度センサとを備え、
体力特性算出手段は、頭部用加速度センサで検出した身体の前後方向の加速度を元にして首側屈可動域を算出し、頭部用加速度センサで検出した身体の身長方向の加速度を元にして股関節屈曲可動域を算出し、胴部用加速度センサで検出した加速度を元にして足関節背屈可動域を算出し、足用角速度センサで得られた角速度より算出した足関節伸展角度を元にして歩隔を算出し、膝用角速度センサで得られた角速度より算出した膝関節屈曲角度を元にして足関節底屈可動域を算出し、肩用角速度センサで検出した角速度より算出した上腕前方最大角度を元にして脚筋力および腰回旋可動域の少なくとも一方を算出するように構成されていることを特徴とする請求項4記載の歩行動作分析装置。
【請求項6】
表示手段は、体力特性算出手段により算出された体力特性をレーダーチャートの形で表示するように構成されていることを特徴とする請求項1〜5のうちいずれか1項記載の歩行動作分析装置。
【請求項7】
表示手段は、体力特性算出手段により算出された体力特性をその基準値を用いて規格化して評価値を算出し、算出した評価値を表示するように構成されていることを特徴とする請求項1〜6のうちいずれか1項記載の歩行動作分析装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2008−173250(P2008−173250A)
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願番号】特願2007−8507(P2007−8507)
【出願日】平成19年1月17日(2007.1.17)
【出願人】(000005832)松下電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願日】平成19年1月17日(2007.1.17)
【出願人】(000005832)松下電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]