
歩行型ロボット用バランス構造
【課題】ロボットの重量をできるだけ増やさずにバランスを取るために脚付根部からバラストまでのモーメントアームを長く取るとともに、末端寄りのフレームを動かしてもバラストが振り回されることがないようにしてロボットの制御を容易なものとすることにある。
【解決手段】水平方向に延在する体を持つ歩行型ロボットである恐竜型ロボットにおいて、前記体の、左右後脚によって直接支持されるフレーム3bの前後端部にバランス調整用のバラスト9,10を搭載したことを特徴とする歩行型ロボット用バランス構造である。
【解決手段】水平方向に延在する体を持つ歩行型ロボットである恐竜型ロボットにおいて、前記体の、左右後脚によって直接支持されるフレーム3bの前後端部にバランス調整用のバラスト9,10を搭載したことを特徴とする歩行型ロボット用バランス構造である。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば恐竜型ロボットのような、水平方向に延在する体を持つ歩行型ロボットのバランスをとるための構造に関するものである。
【背景技術】
【0002】
一般に、歩行型ロボットは、制御機器や関節軸駆動モータ等の複数の重量物を限られたスペースの中に高密度に実装しなくてはならない。このため、前後・左右に対称になるように重量物を搭載することが困難な場合もある。このような場合、最終的にバラスト(錘)を追加搭載して全体のバランスを取るのが一般的な手法である。
【0003】
その一方で、一般に、歩行型ロボットは、重量をできるだけ増やさずバランスを取ることが求められている(例えば特許文献1参照)。
【特許文献1】特許2592340号公報
【0004】
ところで、上記特許文献1記載のロボットのように、一般に、歩行型ロボットは、倒立振り子の原理により歩行するので、水平方向である前後方向に延在する体を持つ歩行型ロボットである例えば恐竜型ロボットで、ロボットの重量をできるだけ増やさずにバランスを取るためには、その恐竜型ロボットの支持点である脚付根部からバラストまでのモーメントアームを長く取るために、脚付根部からできるだけ遠くにバラストを配置する方が有利である。
【0005】
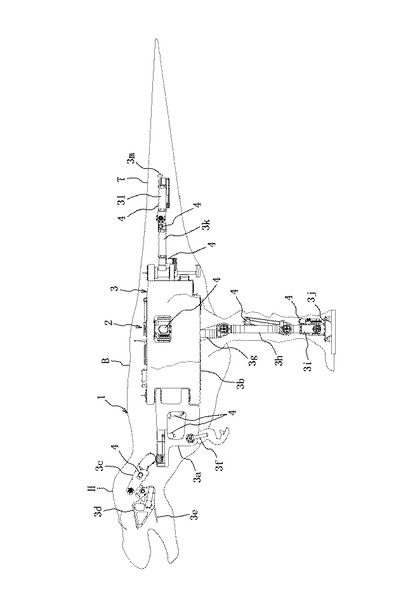
図7および図8は、本願出願人が開発した恐竜型ロボットをその内部構造物を透視した状態で示す側面図および平面図である。この恐竜型ロボットは、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を、恐竜型の外装1で覆ったものであり、ここにおける外装1は、頭部Hと左右胴体部Bと尾部Tとからなり、内部構造物2を覆うように構成されたもので、当該外装1の外部形状を形成する発泡ウレタンフォーム製の肉部の外表面上にシリコン製の外皮を設けて構成されている。
【0006】
また、ここにおける内部構造物2は、胸部フレーム3aと、胴部フレーム3bと、首部フレーム3cと、頭部フレーム3dと、下顎フレーム3eと、左右前脚フレーム3fと、左右後脚フレーム上部3gと、左右後脚フレーム下部3hと、左右足首フレーム3iと、左右足フレーム3jと、尾フレーム基部3kと、尾フレーム中間部3lと、尾フレーム先端部3mとからなるフレーム3を有するとともに、それらのフレーム3同士を繋ぐ関節をそれぞれベルト伝動等で駆動する多数のモータ4を有している。
【0007】
そして、この恐竜型ロボットでは、上記のように脚付根部からできるだけ遠くにバラストを配置するために、胸部フレーム3aの前端部と、尾フレーム中間部3lとにそれぞれ、図示しないが上記バラストを搭載している。
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来の恐竜型ロボットのように、距離を稼ぐことだけを考慮して体の末端部にバラストを配置すると、図8に矢印で示すように、そのロボットが胸部や尾部を振るような動作をするときに、バラストを振り回す結果となってしまい、制御上動かしにくいロボットになってしまうという問題があった。
【課題を解決するための手段】
【0009】
この発明は、上記課題を有利に解決することを目的とするものであり、この発明の歩行型ロボット用バランス構造は、水平方向に延在する体を持つ歩行型ロボットにおいて、前記体の、脚によって直接支持されるフレームの水平方向端部にバランス調整用のバラストを搭載したことを特徴とするものである。
【発明の効果】
【0010】
かかるこの発明の歩行型ロボット用バランス構造にあっては、バランス調整用のバラスト(錘)が、脚によって直接支持されるフレームの水平方向端部に搭載されていることから、その脚によって直接支持されるフレームが可動支持するさらに末端寄りのフレームを動かしてもバラストが振り回されることがない。
【0011】
従って、この発明の歩行型ロボット用バランス構造によれば、ロボットの重量をできるだけ増やさずにバランスを取るために、ロボットの支持点である脚付根部から、脚によって直接支持されるフレームの範囲内で可能な限り遠くにバラストを配置して、脚付根部からバラストまでのモーメントアームを長く取ることができ、しかも、末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、ロボットの制御を容易なものとすることができる。
【0012】
なお、この発明の歩行型ロボット用バランス構造においては、前記バラストを、前記脚によって直接支持されるフレームの水平方向両端部に設けられた吊金具の下に配置しても良く、このようにすれば、ロボットの吊り上げの際にも、バランスを安定させて吊り上げることができる。
【0013】
また、この発明の歩行型ロボット用バランス構造においては、前記歩行型ロボットが、前記体に、胴体フレームと、前記胴体フレームの前端部に揺動可能に設けられた胸フレームと、前記胴体フレームの後端部に揺動可能に設けられた尾フレームとを具える恐竜型ロボットである場合に、前記バラストを、前記脚によって直接支持されるフレームとしての前記胴体フレームの前後端部に搭載することとしても良く、このようにすれば、その恐竜型ロボットが胸部や尾部を振るような動作をする際にも、バラストを振り回すことがないので、ロボットの制御を容易なものとすることができる。
【0014】
さらに、この発明の歩行型ロボット用バランス構造においては、前記バラストは、槐状物または、容器内に液状若しくは粒状の重量物を収容したものであっても良い。
【発明を実施するための最良の形態】
【0015】
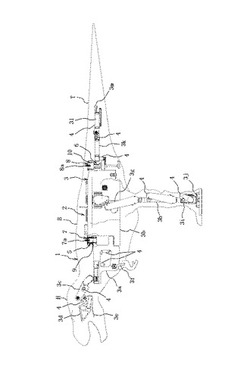
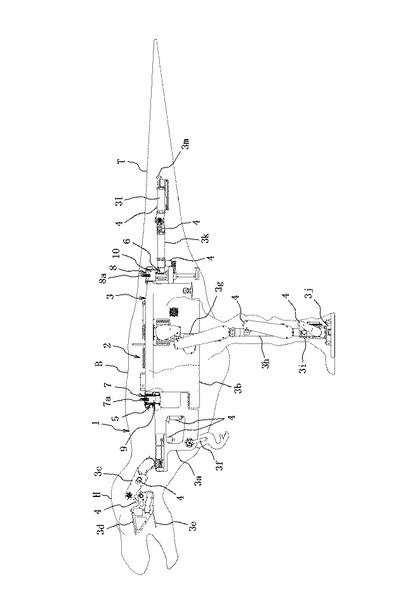
以下、本発明の実施の形態を実施例によって、図面に基づき詳細に説明する。ここに、図1および図2は、この発明の歩行型ロボット用バランス構造の一実施例を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す側面図および平面図、そして図3は、その恐竜型ロボットの内部構造物を示す斜視図であり、図中先の従来例と同様の部分はそれと同一の符号にて示す。
【0016】
すなわち、この実施例のバランス構造を具える恐竜型ロボットは、図7,図8に示す従来例と同様、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を恐竜型の外装1で覆ったものであり、ここにおける外装1も、頭部Hと左右胴体部Bと尾部Tとからなり、内部構造物2を覆うように構成されたもので、当該外装1の外部形状を形成する発泡ウレタンフォーム製の肉部の外表面上にシリコン製の外皮を設けて構成されている。
【0017】
また、ここにおける内部構造物2も、胸部フレーム3aと、胴部フレーム3bと、首部フレーム3cと、頭部フレーム3dと、下顎フレーム3eと、左右前脚フレーム3fと、左右後脚フレーム上部3gと、左右後脚フレーム下部3hと、左右足首フレーム3iと、左右足フレーム3jと、尾フレーム基部3kと、尾フレーム中間部3lと、尾フレーム先端部3mとからなるフレーム3を有するとともに、それらのフレーム3同士を繋ぐ関節をそれぞれベルト伝動等で駆動する多数のモータ4を有している。
【0018】
しかして、この恐竜型ロボットに対し、この実施例のバランス構造では、脚付根部としての、左右後脚フレーム上部3gの関節から、その左右後脚フレーム上部3gを介し左右後脚によって直接支持されたフレームである胴部フレーム3bの範囲内でできるだけ遠くにバラストを配置するために、胴部フレーム3bの前端部と後端部とにそれぞれ、後述のようにバラスト9,10を搭載している。
【0019】
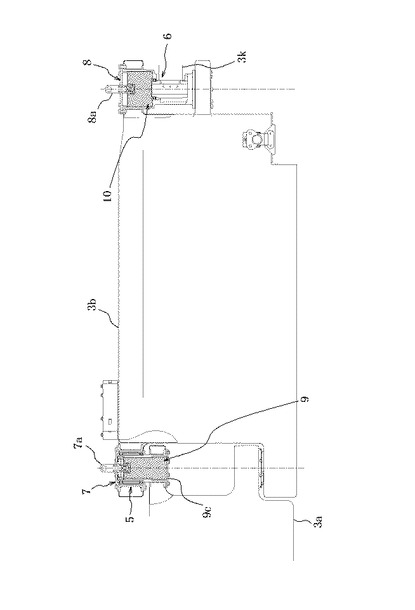
すなわち、この恐竜型ロボットでは、図4に示すように、胴部フレーム3bの前端部と胸部フレーム3aの後端部とを水平揺動可能に接続する胸部関節5と、胴部フレーム3bの後端部と尾フレーム基部3kとを水平揺動可能に接続する尾部第1関節6とがそれぞれその揺動軸線の周囲を中空に形成されるとともに、それらの関節5,6の上端部に、吊金具7a,8a付きの蓋7,8を固定されており、この実施例のバランス構造では、それら中空な胸部関節5と尾部第1関節6との内部に、バラスト9,10がそれぞれ収容されている。
【0020】
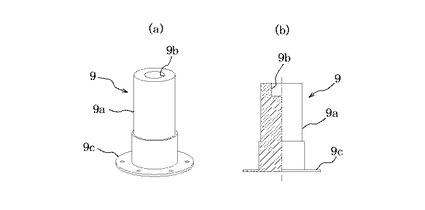
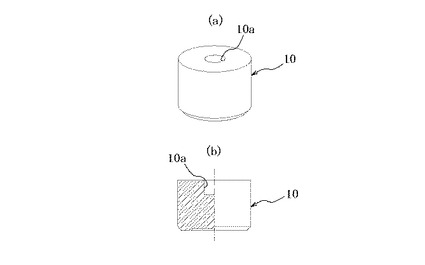
ここで、胸部関節5内に収容されるバラスト9は、図5(a),(b)に斜視図および半部断面側面図で示すように、槐状物としての鉄製丸棒9aの上端部に吊金具のための逃げ凹部9bを設けるとともに,その鉄製丸棒9aの下端部にフランジ9cを設けたものであり、また尾部第1関節6内に収容されるバラスト10は、図6(a),(b)に斜視図および半部断面側面図で示すように、槐状物としての鉄製丸棒からなり、その上端部に吊金具のための逃げ凹部10aを設けたものである。
【0021】
そしてバラスト9は、胸部関節5の内部にその揺動軸線と同心に配置されて吊金具7aの真下に位置するとともに、フランジ9cを胸部フレーム3aに固定されており、またバラスト10は、尾部第1関節6の内部にその揺動軸線と同心に配置されて吊金具8aの真下に位置するとともに、蓋8によって胴部フレーム3bに固定されている。
【0022】
かかる実施例のバランス構造にあっては、バランス調整用のバラスト9,10が、左右後脚フレーム上部3gを介し左右後脚によって直接支持されたフレームである胴部フレーム3bの水平方向両端部に搭載されていることから、その胴部フレーム3bが可動支持するさらに末端寄りの、胸部フレーム3aおよびそれより先のフレームや、尾フレーム基部3kおよびそれより後のフレームを動かしても、バラスト9,10が振り回されることがない。
【0023】
従って、この実施例の歩行型ロボット用バランス構造によれば、恐竜型ロボットの重量をできるだけ増やさずにバランスを取るために、恐竜型ロボットの支持点である脚付根部としての、左右後脚フレーム上部3gの関節から、左右後脚によって直接支持されるその胴部フレーム3bの範囲内で可能な限り遠くにバラスト9,10を配置して、左右後脚フレーム上部3gの関節からバラスト9,10までのモーメントアームを長く取ることができ、しかも、上記末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、恐竜型ロボットの制御を容易なものとすることができる。
【0024】
また、この実施例の歩行型ロボット用バランス構造によれば、バラスト9,10を、左右後脚によって直接支持される胴部フレーム3bの水平方向両端部に設けられた吊金具7a,8aの真下に配置しているので、恐竜型ロボットの吊り上げの際にも、バランスを安定させて吊り上げることができる。
【0025】
さらに、この実施例の歩行型ロボット用バランス構造によれば、恐竜型ロボットがその体に、胴体フレーム3bと、その胴体フレーム3bの前端部に揺動可能に設けられた胸フレーム3aと、その胴体フレーム3bの後端部に揺動可能に設けられた尾フレーム基部3kとを具えていて、バラスト9,10を、その胴体フレーム3bの前後端部に搭載することとしていることから、その恐竜型ロボットが胸部や尾部を振るような動作をする際にも、バラスト9,10を振り回すことがないので、恐竜型ロボットの制御を容易なものとすることができる。
【0026】
さらに、この実施例の歩行型ロボット用バランス構造によれば、バラスト9,10は、槐状物からなるものであるので、削り出しにより容易に形状および重量を所望のものとすることができる。
【0027】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、例えば、バラストは丸棒状以外の他の形状の鉄製槐状物でも良く、鉄以外の金属や粘土等の槐状物でも良い。またバラストは所望の形状の容器内に液状若しくは粒状の重量物を収容したものでも良く、このようにすれば、所望の形状および重量のバラストを安価に製造することができる。
【0028】
また、この発明のバランス構造は、恐竜型ロボット等の前後方向に延在する体を持つものに限られず、例えば左右方向に延在する長い腕を持つ作業ロボット等にも適用することができる。
【産業上の利用可能性】
【0029】
かくしてこの発明の歩行型ロボット用バランス構造によれば、ロボットの重量をできるだけ増やさずにバランスを取るために、ロボットの支持点である脚付根部から、脚によって直接支持されるフレームの範囲内で可能な限り遠くにバラストを配置して、脚付根部からバラストまでのモーメントアームを長く取ることができ、しかも、末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、ロボットの制御を容易なものとすることができる。
【図面の簡単な説明】
【0030】
【図1】この発明の歩行型ロボット用バランス構造の一実施例を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す側面図である。
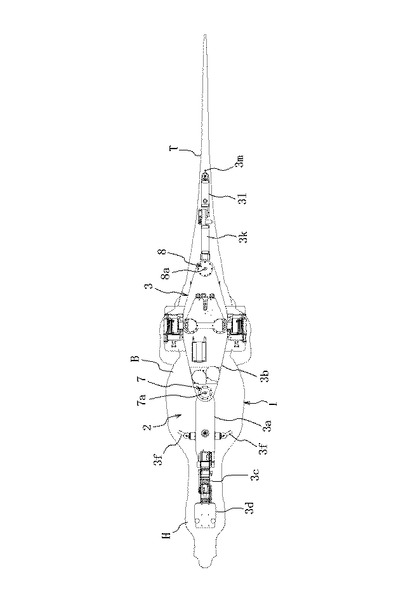
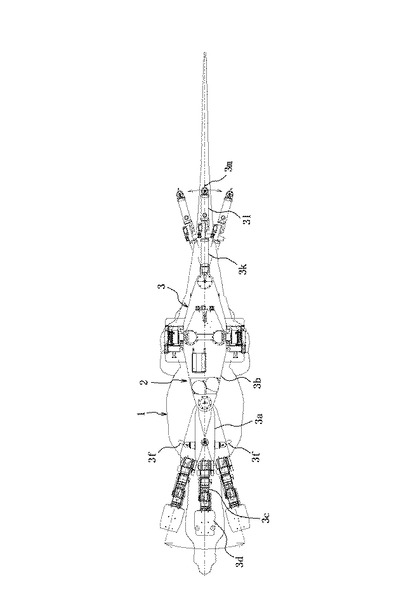
【図2】上記実施例の歩行型ロボット用バランス構造を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す平面図である。
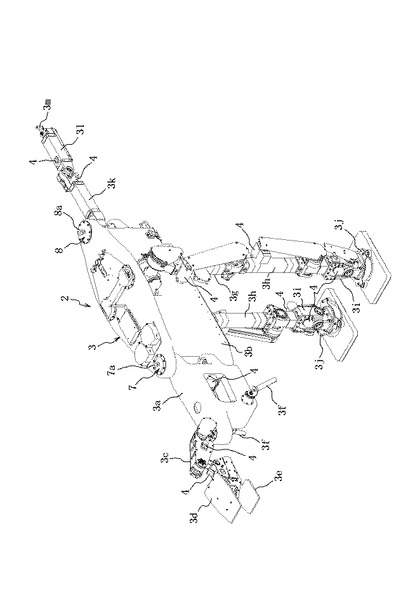
【図3】上記実施例の歩行型ロボット用バランス構造を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットの内部構造物を示す斜視図である。
【図4】上記実施例の歩行型ロボット用バランス構造を示す断面図である。
【図5】(a),(b)は、上記実施例の歩行型ロボット用バランス構造に用いたバラストの一つを示す斜視図および半部断面側面図である。
【図6】(a),(b)は、上記実施例の歩行型ロボット用バランス構造に用いたバラストの他の一つを示す斜視図および半部断面側面図である。
【図7】従来の恐竜型ロボットをその内部構造物を透視した状態で示す側面図である。
【図8】上記従来の恐竜型ロボットをその内部構造物を透視した状態で示す平面図である。
【符号の説明】
【0031】
1 外装
2 内部構造物
3 フレーム
3a 胸部フレーム
3b 胴部フレーム
3c 首部フレーム
3d 頭部フレーム
3e 下顎フレーム
3f 左右前脚フレーム
3g 左右後脚フレーム上部
3h 左右後脚フレーム下部
3i 左右足首フレーム
3j 左右足フレーム
3k 尾フレーム基部
3l 尾フレーム中間部
3m 尾フレーム先端部
4 モータ
5 胸部関節
6 尾部第1関節
7,8 蓋
7a,8a 吊金具
9,10 バラスト
9a 鉄製丸棒
9b、10a 逃げ凹部
9c フランジ
H 頭部
B 胴体部
T 尾部
【技術分野】
【0001】
この発明は、例えば恐竜型ロボットのような、水平方向に延在する体を持つ歩行型ロボットのバランスをとるための構造に関するものである。
【背景技術】
【0002】
一般に、歩行型ロボットは、制御機器や関節軸駆動モータ等の複数の重量物を限られたスペースの中に高密度に実装しなくてはならない。このため、前後・左右に対称になるように重量物を搭載することが困難な場合もある。このような場合、最終的にバラスト(錘)を追加搭載して全体のバランスを取るのが一般的な手法である。
【0003】
その一方で、一般に、歩行型ロボットは、重量をできるだけ増やさずバランスを取ることが求められている(例えば特許文献1参照)。
【特許文献1】特許2592340号公報
【0004】
ところで、上記特許文献1記載のロボットのように、一般に、歩行型ロボットは、倒立振り子の原理により歩行するので、水平方向である前後方向に延在する体を持つ歩行型ロボットである例えば恐竜型ロボットで、ロボットの重量をできるだけ増やさずにバランスを取るためには、その恐竜型ロボットの支持点である脚付根部からバラストまでのモーメントアームを長く取るために、脚付根部からできるだけ遠くにバラストを配置する方が有利である。
【0005】
図7および図8は、本願出願人が開発した恐竜型ロボットをその内部構造物を透視した状態で示す側面図および平面図である。この恐竜型ロボットは、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を、恐竜型の外装1で覆ったものであり、ここにおける外装1は、頭部Hと左右胴体部Bと尾部Tとからなり、内部構造物2を覆うように構成されたもので、当該外装1の外部形状を形成する発泡ウレタンフォーム製の肉部の外表面上にシリコン製の外皮を設けて構成されている。
【0006】
また、ここにおける内部構造物2は、胸部フレーム3aと、胴部フレーム3bと、首部フレーム3cと、頭部フレーム3dと、下顎フレーム3eと、左右前脚フレーム3fと、左右後脚フレーム上部3gと、左右後脚フレーム下部3hと、左右足首フレーム3iと、左右足フレーム3jと、尾フレーム基部3kと、尾フレーム中間部3lと、尾フレーム先端部3mとからなるフレーム3を有するとともに、それらのフレーム3同士を繋ぐ関節をそれぞれベルト伝動等で駆動する多数のモータ4を有している。
【0007】
そして、この恐竜型ロボットでは、上記のように脚付根部からできるだけ遠くにバラストを配置するために、胸部フレーム3aの前端部と、尾フレーム中間部3lとにそれぞれ、図示しないが上記バラストを搭載している。
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来の恐竜型ロボットのように、距離を稼ぐことだけを考慮して体の末端部にバラストを配置すると、図8に矢印で示すように、そのロボットが胸部や尾部を振るような動作をするときに、バラストを振り回す結果となってしまい、制御上動かしにくいロボットになってしまうという問題があった。
【課題を解決するための手段】
【0009】
この発明は、上記課題を有利に解決することを目的とするものであり、この発明の歩行型ロボット用バランス構造は、水平方向に延在する体を持つ歩行型ロボットにおいて、前記体の、脚によって直接支持されるフレームの水平方向端部にバランス調整用のバラストを搭載したことを特徴とするものである。
【発明の効果】
【0010】
かかるこの発明の歩行型ロボット用バランス構造にあっては、バランス調整用のバラスト(錘)が、脚によって直接支持されるフレームの水平方向端部に搭載されていることから、その脚によって直接支持されるフレームが可動支持するさらに末端寄りのフレームを動かしてもバラストが振り回されることがない。
【0011】
従って、この発明の歩行型ロボット用バランス構造によれば、ロボットの重量をできるだけ増やさずにバランスを取るために、ロボットの支持点である脚付根部から、脚によって直接支持されるフレームの範囲内で可能な限り遠くにバラストを配置して、脚付根部からバラストまでのモーメントアームを長く取ることができ、しかも、末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、ロボットの制御を容易なものとすることができる。
【0012】
なお、この発明の歩行型ロボット用バランス構造においては、前記バラストを、前記脚によって直接支持されるフレームの水平方向両端部に設けられた吊金具の下に配置しても良く、このようにすれば、ロボットの吊り上げの際にも、バランスを安定させて吊り上げることができる。
【0013】
また、この発明の歩行型ロボット用バランス構造においては、前記歩行型ロボットが、前記体に、胴体フレームと、前記胴体フレームの前端部に揺動可能に設けられた胸フレームと、前記胴体フレームの後端部に揺動可能に設けられた尾フレームとを具える恐竜型ロボットである場合に、前記バラストを、前記脚によって直接支持されるフレームとしての前記胴体フレームの前後端部に搭載することとしても良く、このようにすれば、その恐竜型ロボットが胸部や尾部を振るような動作をする際にも、バラストを振り回すことがないので、ロボットの制御を容易なものとすることができる。
【0014】
さらに、この発明の歩行型ロボット用バランス構造においては、前記バラストは、槐状物または、容器内に液状若しくは粒状の重量物を収容したものであっても良い。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態を実施例によって、図面に基づき詳細に説明する。ここに、図1および図2は、この発明の歩行型ロボット用バランス構造の一実施例を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す側面図および平面図、そして図3は、その恐竜型ロボットの内部構造物を示す斜視図であり、図中先の従来例と同様の部分はそれと同一の符号にて示す。
【0016】
すなわち、この実施例のバランス構造を具える恐竜型ロボットは、図7,図8に示す従来例と同様、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を恐竜型の外装1で覆ったものであり、ここにおける外装1も、頭部Hと左右胴体部Bと尾部Tとからなり、内部構造物2を覆うように構成されたもので、当該外装1の外部形状を形成する発泡ウレタンフォーム製の肉部の外表面上にシリコン製の外皮を設けて構成されている。
【0017】
また、ここにおける内部構造物2も、胸部フレーム3aと、胴部フレーム3bと、首部フレーム3cと、頭部フレーム3dと、下顎フレーム3eと、左右前脚フレーム3fと、左右後脚フレーム上部3gと、左右後脚フレーム下部3hと、左右足首フレーム3iと、左右足フレーム3jと、尾フレーム基部3kと、尾フレーム中間部3lと、尾フレーム先端部3mとからなるフレーム3を有するとともに、それらのフレーム3同士を繋ぐ関節をそれぞれベルト伝動等で駆動する多数のモータ4を有している。
【0018】
しかして、この恐竜型ロボットに対し、この実施例のバランス構造では、脚付根部としての、左右後脚フレーム上部3gの関節から、その左右後脚フレーム上部3gを介し左右後脚によって直接支持されたフレームである胴部フレーム3bの範囲内でできるだけ遠くにバラストを配置するために、胴部フレーム3bの前端部と後端部とにそれぞれ、後述のようにバラスト9,10を搭載している。
【0019】
すなわち、この恐竜型ロボットでは、図4に示すように、胴部フレーム3bの前端部と胸部フレーム3aの後端部とを水平揺動可能に接続する胸部関節5と、胴部フレーム3bの後端部と尾フレーム基部3kとを水平揺動可能に接続する尾部第1関節6とがそれぞれその揺動軸線の周囲を中空に形成されるとともに、それらの関節5,6の上端部に、吊金具7a,8a付きの蓋7,8を固定されており、この実施例のバランス構造では、それら中空な胸部関節5と尾部第1関節6との内部に、バラスト9,10がそれぞれ収容されている。
【0020】
ここで、胸部関節5内に収容されるバラスト9は、図5(a),(b)に斜視図および半部断面側面図で示すように、槐状物としての鉄製丸棒9aの上端部に吊金具のための逃げ凹部9bを設けるとともに,その鉄製丸棒9aの下端部にフランジ9cを設けたものであり、また尾部第1関節6内に収容されるバラスト10は、図6(a),(b)に斜視図および半部断面側面図で示すように、槐状物としての鉄製丸棒からなり、その上端部に吊金具のための逃げ凹部10aを設けたものである。
【0021】
そしてバラスト9は、胸部関節5の内部にその揺動軸線と同心に配置されて吊金具7aの真下に位置するとともに、フランジ9cを胸部フレーム3aに固定されており、またバラスト10は、尾部第1関節6の内部にその揺動軸線と同心に配置されて吊金具8aの真下に位置するとともに、蓋8によって胴部フレーム3bに固定されている。
【0022】
かかる実施例のバランス構造にあっては、バランス調整用のバラスト9,10が、左右後脚フレーム上部3gを介し左右後脚によって直接支持されたフレームである胴部フレーム3bの水平方向両端部に搭載されていることから、その胴部フレーム3bが可動支持するさらに末端寄りの、胸部フレーム3aおよびそれより先のフレームや、尾フレーム基部3kおよびそれより後のフレームを動かしても、バラスト9,10が振り回されることがない。
【0023】
従って、この実施例の歩行型ロボット用バランス構造によれば、恐竜型ロボットの重量をできるだけ増やさずにバランスを取るために、恐竜型ロボットの支持点である脚付根部としての、左右後脚フレーム上部3gの関節から、左右後脚によって直接支持されるその胴部フレーム3bの範囲内で可能な限り遠くにバラスト9,10を配置して、左右後脚フレーム上部3gの関節からバラスト9,10までのモーメントアームを長く取ることができ、しかも、上記末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、恐竜型ロボットの制御を容易なものとすることができる。
【0024】
また、この実施例の歩行型ロボット用バランス構造によれば、バラスト9,10を、左右後脚によって直接支持される胴部フレーム3bの水平方向両端部に設けられた吊金具7a,8aの真下に配置しているので、恐竜型ロボットの吊り上げの際にも、バランスを安定させて吊り上げることができる。
【0025】
さらに、この実施例の歩行型ロボット用バランス構造によれば、恐竜型ロボットがその体に、胴体フレーム3bと、その胴体フレーム3bの前端部に揺動可能に設けられた胸フレーム3aと、その胴体フレーム3bの後端部に揺動可能に設けられた尾フレーム基部3kとを具えていて、バラスト9,10を、その胴体フレーム3bの前後端部に搭載することとしていることから、その恐竜型ロボットが胸部や尾部を振るような動作をする際にも、バラスト9,10を振り回すことがないので、恐竜型ロボットの制御を容易なものとすることができる。
【0026】
さらに、この実施例の歩行型ロボット用バランス構造によれば、バラスト9,10は、槐状物からなるものであるので、削り出しにより容易に形状および重量を所望のものとすることができる。
【0027】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、例えば、バラストは丸棒状以外の他の形状の鉄製槐状物でも良く、鉄以外の金属や粘土等の槐状物でも良い。またバラストは所望の形状の容器内に液状若しくは粒状の重量物を収容したものでも良く、このようにすれば、所望の形状および重量のバラストを安価に製造することができる。
【0028】
また、この発明のバランス構造は、恐竜型ロボット等の前後方向に延在する体を持つものに限られず、例えば左右方向に延在する長い腕を持つ作業ロボット等にも適用することができる。
【産業上の利用可能性】
【0029】
かくしてこの発明の歩行型ロボット用バランス構造によれば、ロボットの重量をできるだけ増やさずにバランスを取るために、ロボットの支持点である脚付根部から、脚によって直接支持されるフレームの範囲内で可能な限り遠くにバラストを配置して、脚付根部からバラストまでのモーメントアームを長く取ることができ、しかも、末端寄りのフレームを動かしてもバラストが振り回されることがないので、慣性による反作用等の影響を少なくし得て、ロボットの制御を容易なものとすることができる。
【図面の簡単な説明】
【0030】
【図1】この発明の歩行型ロボット用バランス構造の一実施例を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す側面図である。
【図2】上記実施例の歩行型ロボット用バランス構造を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットをその内部構造物を透視した状態で示す平面図である。
【図3】上記実施例の歩行型ロボット用バランス構造を適用した、水平方向に延在する体を持つ歩行型ロボットの一例としての、図7,図8に示すものと同様の恐竜型ロボットの内部構造物を示す斜視図である。
【図4】上記実施例の歩行型ロボット用バランス構造を示す断面図である。
【図5】(a),(b)は、上記実施例の歩行型ロボット用バランス構造に用いたバラストの一つを示す斜視図および半部断面側面図である。
【図6】(a),(b)は、上記実施例の歩行型ロボット用バランス構造に用いたバラストの他の一つを示す斜視図および半部断面側面図である。
【図7】従来の恐竜型ロボットをその内部構造物を透視した状態で示す側面図である。
【図8】上記従来の恐竜型ロボットをその内部構造物を透視した状態で示す平面図である。
【符号の説明】
【0031】
1 外装
2 内部構造物
3 フレーム
3a 胸部フレーム
3b 胴部フレーム
3c 首部フレーム
3d 頭部フレーム
3e 下顎フレーム
3f 左右前脚フレーム
3g 左右後脚フレーム上部
3h 左右後脚フレーム下部
3i 左右足首フレーム
3j 左右足フレーム
3k 尾フレーム基部
3l 尾フレーム中間部
3m 尾フレーム先端部
4 モータ
5 胸部関節
6 尾部第1関節
7,8 蓋
7a,8a 吊金具
9,10 バラスト
9a 鉄製丸棒
9b、10a 逃げ凹部
9c フランジ
H 頭部
B 胴体部
T 尾部
【特許請求の範囲】
【請求項1】
水平方向に延在する体を持つ歩行型ロボットにおいて、
前記体の、脚によって直接支持されるフレームの水平方向端部にバランス調整用のバラストを搭載したことを特徴とする、歩行型ロボット用バランス構造。
【請求項2】
前記バラストは、前記脚によって直接支持されるフレームの水平方向両端部に設けられた吊金具の下に配置したことを特徴とする、請求項1記載の歩行型ロボット用バランス構造。
【請求項3】
前記歩行型ロボットは、前記体に、胴体フレームと、前記胴体フレームの前端部に揺動可能に設けられた胸フレームと、前記胴体フレームの後端部に揺動可能に設けられた尾フレームとを具える恐竜型ロボットであり、
前記バラストは、前記脚によって直接支持されるフレームとしての前記胴体フレームの前後端部に搭載したことを特徴とする、請求項1または2記載の歩行型ロボット用バランス構造。
【請求項4】
前記バラストは、槐状物または、容器内に液状若しくは粒状の重量物を収容したものであることを特徴とする、請求項1から3までの何れか記載の歩行型ロボット用バランス構造。
【請求項1】
水平方向に延在する体を持つ歩行型ロボットにおいて、
前記体の、脚によって直接支持されるフレームの水平方向端部にバランス調整用のバラストを搭載したことを特徴とする、歩行型ロボット用バランス構造。
【請求項2】
前記バラストは、前記脚によって直接支持されるフレームの水平方向両端部に設けられた吊金具の下に配置したことを特徴とする、請求項1記載の歩行型ロボット用バランス構造。
【請求項3】
前記歩行型ロボットは、前記体に、胴体フレームと、前記胴体フレームの前端部に揺動可能に設けられた胸フレームと、前記胴体フレームの後端部に揺動可能に設けられた尾フレームとを具える恐竜型ロボットであり、
前記バラストは、前記脚によって直接支持されるフレームとしての前記胴体フレームの前後端部に搭載したことを特徴とする、請求項1または2記載の歩行型ロボット用バランス構造。
【請求項4】
前記バラストは、槐状物または、容器内に液状若しくは粒状の重量物を収容したものであることを特徴とする、請求項1から3までの何れか記載の歩行型ロボット用バランス構造。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−319946(P2007−319946A)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−150107(P2006−150107)
【出願日】平成18年5月30日(2006.5.30)
【出願人】(591210600)川田工業株式会社 (57)
【Fターム(参考)】
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成18年5月30日(2006.5.30)
【出願人】(591210600)川田工業株式会社 (57)
【Fターム(参考)】
[ Back to top ]