
歩行型作業機の支持装置
【課題】歩行型作業機を車のトランクや荷台等に楽に車載できるようにする。
【解決手段】歩行型作業機1の支持装置2において、歩行型作業機1の前部に対して連結及び取り外し自在な着脱機構30を備える主フレーム40と、主フレーム40に、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアーム60と、アーム60の下端部に回転自在に軸支されている車輪50と、を備えてある。
【解決手段】歩行型作業機1の支持装置2において、歩行型作業機1の前部に対して連結及び取り外し自在な着脱機構30を備える主フレーム40と、主フレーム40に、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアーム60と、アーム60の下端部に回転自在に軸支されている車輪50と、を備えてある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行型作業機に連結及び取り外し自在である、歩行型作業機の支持装置に関する。
【背景技術】
【0002】
歩行型作業機としては、後部に操縦ハンドル、下部に耕耘ロータを備えてあり、操縦ハンドルを握りながら歩行型作業機を移動操作し、耕耘ロータで地面を耕すことができるようにしたものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−115067号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記構成の歩行型作業機を車の荷台等に車載する場合、使用者は、操縦ハンドルを握りながら歩行型作業機を荷台等の後側まで移動操作させた後、操縦ハンドルから手を離し、歩行型作業機を手で掴んで持ち上げながら荷台等に積み込むことになる。
しかし、このとき使用者は、重い歩行型作業機の全重量を手で支えなければならず重労働であった。
【0005】
本発明の目的は、歩行型作業機を車のトランクや荷台等(以下、積込位置と称する)に楽に車載できるようにすることにある。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、歩行型作業機の支持装置において次のように構成することにある。
歩行型作業機の前部に対して連結及び取り外し自在な着脱機構を備える主フレームと、
前記主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアームと、
前記アームの下端部に回転自在に軸支されている車輪と、を備えてある。
【0007】
(作用及び発明の効果)
本発明の第1特徴を備える支持装置は、着脱機構によって歩行型作業機の前部に連結することができるように構成してあり、さらに、主フレームに支持されているアームの下端部に車輪を軸支してある。
これによると、例えば、後方下部に後輪と、後方上部に操縦ハンドルとを備えてある歩行型作業機の前部に、本発明の特徴を備える支持装置を連結すると、使用者は、操縦ハンドルを握りながら、支持装置の車輪と後輪とを用いてこの歩行型作業機を移動操作し、積込位置の後側まで移動させることができる。
また、使用者は、積込位置の後側に歩行型作業機を移動操作した後、操縦ハンドルを下方操作することで、歩行型作業機の前側と支持装置とを後輪の回転軸芯周りに上方揺動させ、支持装置の車輪を積込位置の高さまで浮き上がらせて積込位置に載せることができる。
さらに、使用者は、積込位置に載せた支持装置の車輪をてこの原理の支点としながら、歩行型作業機を積込位置の高さまで手で持ち上げることができる。即ち、上記のようにして歩行型作業機を手で持ち上げるとき、積込位置に載せた車輪が歩行型作業機の重量の一部を支持してくれるので、歩行型作業機の全重量を手だけで支えながら持ち上げる場合に比して、使用者は歩行型作業機を楽な力で持ち上げることができ、そのまま支持装置の車輪を用いて前進させれば、積込位置に歩行型作業機を楽な力で車載することができる。
【0008】
次に、本発明の第1特徴を備える支持装置は、車輪を下端部に軸支してあるアームを、主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持してある。
これによると、例えば、上記のように操縦ハンドルを下方操作して支持装置の車輪を積込位置に載せるとき、アームを前側の使用姿勢にしておくと、前側の使用姿勢よりも後ろ側の姿勢に設定しているときに比べて車輪は高く浮き上がるので、容易に積込位置に載せることができる。
また、上記のように、アームが使用姿勢にされている状態で支持装置の車輪を積込位置に載せた後、その車輪を支点としながら歩行型作業機を手で持ち上げ、そのまま車輪を用いて前進させて積込位置に車載するとき、アームを後側の格納姿勢に移動させることで支持装置の全長を短くすることができるので、積込位置が狭い場合においても歩行型作業機を車載し易い。
【0009】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の歩行型作業機の支持装置において次のように構成することにある。
前記アームを前記使用姿勢に付勢するバネ機構と、
前記アームを前記格納姿勢で保持及び解除自在なロック機構と、を備えてある。
【0010】
(作用及び発明の効果)
本発明の第2特徴を備える支持装置は、アームを使用姿勢に付勢するバネ機構を備えてある。
このバネ機構を備える支持装置を歩行型作業機に連結し、上記のように、アームが使用姿勢にされている状態で支持装置の車輪を積込位置に載せた後、その車輪を支点としながら歩行型作業機を手で持ち上げ、そのまま車輪を用いて前進させて積込位置に車載するとき、車輪を積込位置の前方にある壁等(例えばシートバック)に当接させながら歩行型作業機を前進させると、バネ機構の付勢作用に抗して、自動的にアームが使用姿勢から格納姿勢に姿勢変更する。即ち、支持装置の全長が自動的に短くなるので、使用者は、支持装置を連結しながらも歩行型作業機を狭い積込位置に楽に車載することができる。
【0011】
また、本発明の第2特徴を備える支持装置は、アームを格納姿勢で保持及び解除自在なロック機構を備えてある。
これによると、上記のように歩行型作業機を積込位置に車載したとき、ロック機構によってアームを格納姿勢で保持しておけば、積込位置において歩行型作業機の向きが変わり、車輪がシートバック等から離れることがあっても、バネ機構の付勢作用によってアームが使用姿勢に姿勢変更されることがないので、支持装置の全長を常に短い状態で保持しておくことができ、積込位置において歩行型作業機が占有するスペースが大きくなることを抑制できる。
【0012】
[III]
(構成)
本発明の第3特徴は、本発明の第1又は第2特徴の歩行型作業機の支持装置において次のように構成することにある。
前記アームが前記格納姿勢になると、自動的に前記アームを前記格納姿勢で保持するように前記ロック機構を構成してある。
【0013】
(作用及び発明の効果)
本発明の第3特徴によると、アームは、格納姿勢になるとロック機構によって自動的に格納姿勢の状態を保持される。
これによると、上記のように、積込位置において、車輪を積込位置の前方にある壁等(例えばシートバック)に当接させながら歩行型作業機を前進させ、自動的にアームを使用姿勢から格納姿勢に姿勢変更させるとき、ロック機構によって自動的にアームを格納姿勢で保持することができるので、狭い積込位置に歩行型作業機を更に楽に車載することができる。
【0014】
[IV]
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の歩行型作業機の支持装置のうちのいずれか一つにおいて次のように構成することにある。
前記アームが前記格納姿勢において、前記車輪を前記車輪が接する面から持ち上げる車輪持上げ機構を備える。
【0015】
(作用及び発明の効果)
本発明の第4特徴によると、支持装置のアームを格納姿勢にしたとき、車輪がその接する面から車輪持上げ機構によって持ち上げられる。
従って、使用者は、積込位置において、支持装置のアームを格納姿勢にすることにより、車輪を車輪持上げ機構によって持ち上げ、歩行型作業機を動かないようにして車載することができる。
【図面の簡単な説明】
【0016】
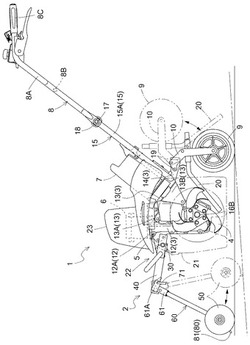
【図1】歩行型作業機に取り付けた状態の支持装置を示す側面図である。
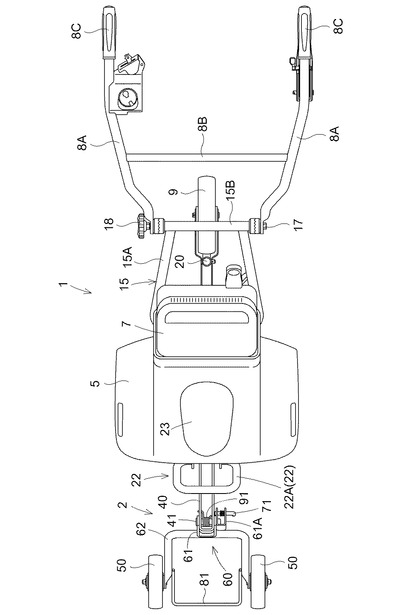
【図2】歩行型作業機に取り付けた状態の支持装置を示す平面図である。
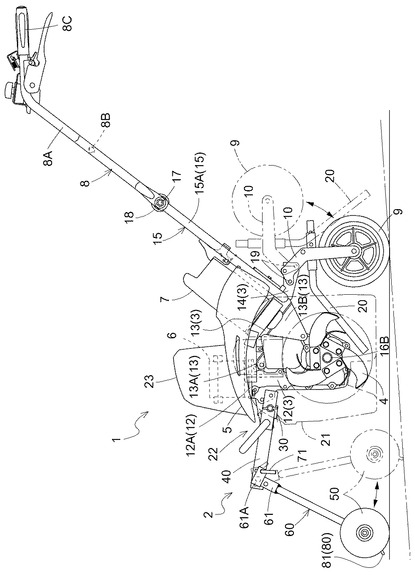
【図3】歩行型作業機を示す側面図である。
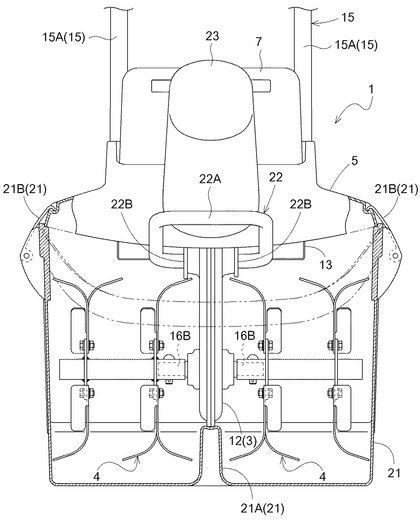
【図4】歩行型作業機の収納ケースなどの構成を示す要部の一部縦断正面図である。
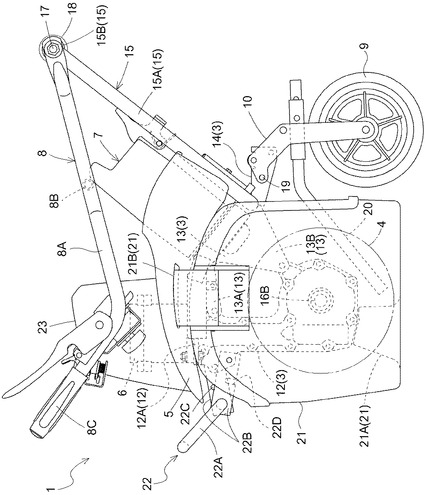
【図5】歩行型作業機のフロントガードと支持装置とを示す側面図である。
【図6】歩行型作業機のフロントガードと支持装置とを示す平面図である。
【図7】歩行型作業機のフロントガードと支持装置とを示す背面図である。
【発明を実施するための形態】
【0017】
(歩行型作業機の全体構成)
図1乃至図4に示すように、本実施形態で例示する歩行型作業機1は、歩行型作業機1の主な骨格となる機体フレーム3の下部に、地面を耕すための左右一対の耕耘ロータ4が備えられている。
また、歩行型作業機1は、機体フレーム3の上部に、左右一対の耕耘ロータ4の上方を覆うロータカバー5と、耕耘ロータ4を駆動する電動モータ6と、電動モータ6の上方を覆うモータカバー23と、電動モータ6に給電するバッテリ7と、歩行型作業機1を使用するときの把持部として使用可能な操縦ハンドル8と、が備えられている。
さらに、歩行型作業機1は、機体フレーム3の前部に、歩行型作業機1を持ち運ぶ際に把持部として使用可能なフロントガード22が備えられ、機体フレーム3の後端部に、後輪9を支持する後アーム10が前後揺動自在に軸支されている。
そして、歩行型作業機1は、耕耘ロータ4を下方から収納可能な収納ケース21をロータカバー5の下部に取り付け及び取り外し自在にしてある。
【0018】
(機体フレーム)
図1,3に示すように、機体フレーム3は、機体フレーム3の前側部分である伝動ケース12と、中央部分である中央部フレーム13と、後側部分である後部フレーム14と、中央部フレーム13及び後部フレーム14の間に位置し、かつ、操縦ハンドル8を前後揺動自在に支持してあるハンドルフレーム15と、を連結して構成されている。
【0019】
(伝動ケース、耕耘ロータ、電動モータ)
図1,3に示すように、内部中空の伝動ケース12は、側面視L字状に形成されてあり、その上端部に形成されているフランジ部12Aの上面に、電動モータ6が配置されている。伝動ケース12の内部には、電動モータ6の出力軸(図示せず)と、出力軸に連結する入力軸(図示せず)を備えるウォーム減速機(図示せず)が内蔵されている。図4に示すように、ウォーム減速機には、伝動ケース12の下端部から左右方向に延出する出力軸16Bが備えられてあり、左右の出力軸16Bには、夫々に対応する左右一対の耕耘ロータ4が一体回転可能なように連結されている。
【0020】
(中央部フレーム)
図1,3に示すように、中央部フレーム13は、前方延出端部13Aが伝動ケース12の上部にボルト連結され、下方延出端部13Bが伝動ケース12の下部にボルト連結されることで、伝動ケース12に支持されている。
【0021】
(バッテリ)
図1乃至図3に示すように、バッテリ7は、中央部フレーム13の上面に配置されており、バッテリ7と電動モータ6とを接続する電線(図示せず)によって、電動モータ6に給電するようにしてある。
【0022】
(ハンドルフレーム)
図1乃至図4に示すように、ハンドルフレーム15は、背面視U字状に屈曲形成された丸パイプ材からなる第一部材15Aと、一直線状の丸パイプ材からなる第二部材15Bとを備え、第一部材15Aの一対の上端部に、第二部材15Bの両端部を夫々溶接固定して構成されている。そして、ハンドルフレーム15は、第一部材15Aの下部左右中央部を中央部フレーム13の後端部に溶接して、後傾斜姿勢になるように固定されている。
【0023】
(操縦ハンドル)
図1乃至図3に示すように、操縦ハンドル8は、側面視への字状に屈曲形成した左右一対の丸パイプ材からなるハンドル部材8Aの中央部を、一直線状の丸パイプ材からなる接続部材8Bで接続し、そして、ハンドル部材8Aの両上端部に、使用者が歩行型作業機1を使用するときに握る部分となるゴム製のグリップ8Cを嵌めて構成されている。
【0024】
(操縦ハンドルとハンドルフレーム)
図1乃至図3に示すように、ハンドルフレーム15の第二部材15Bと、第二部材15Bの両端部を挟むようにして位置する操縦ハンドル8の一対の下端部とには、左方からボルト17が挿通されている。これによって、操縦ハンドル8は、ハンドルフレーム15に、前後揺動自在に軸支されている。
ボルト17の右端部には、第二部材15Bの右端部にハンドル部材8Aの下端部を締め付けるための締付手段としてのノブ付きナット18が螺合されている。つまり、操縦ハンドル8は、ノブ付きナット18の締付作用によって、ハンドルフレーム15に対する揺動姿勢を保持及び解除可能にされている。従って、操縦ハンドル8は、図1に示すような、歩行型作業機1を操縦するときに用いる操縦姿勢(ハンドルフレーム15に対して後方に揺動した状態)と、図3に示すような、積込位置において歩行型作業機1をコンパクトにするときに用いる非操縦姿勢(ハンドルフレーム15に対して前方に揺動した状態)と、で保持することができる。
【0025】
(後部フレーム)
図1,3に示すように、ハンドルフレーム15の第一部材15Aの下部左右中央部には、後部フレーム14が前端部を溶接固定されており、後方へ延出するように支持されている。
【0026】
(後アームと後輪)
図1,3に示すように、後部フレーム14の延出端部には、後輪9を支持する後アーム10が後部フレーム14に対して前後揺動自在に軸支されている。
後輪9は、後アーム10の遊端部に、左右方向周りに回転自在に軸支されている。
【0027】
(後アームの保持手段)
図1,3に示すように、後アーム10と後部フレーム14とには、後アーム10の揺動姿勢を保持及び解除自在とする保持手段が備えられている。
保持手段は、後アーム10の基端部側に左右向きに形成された貫通穴に摺動可能に内嵌されているピン19と、後部フレーム14の延出端部に左右向きに形成されてあり、前記ピン19の先端部を抜き挿し自在である複数のピン用孔(図示しない)とで構成されている。そして、複数のピン用孔は、後アーム10が、図1の実線及び図3で示す状態のように、後輪9を接地させるときに用いる下向き姿勢と、図1の2点鎖線で示す状態のように、後輪9を接地させないときに用いる後向き姿勢とになったとき、ピン19と側面視において重なるような位置に形成されている。
つまり、保持手段は、ピン19とピン用孔とが側面視において重なったときに、ピン19をピン用孔に挿通して係合させることで、後アーム10を下向き姿勢又は後向き姿勢で保持でき、また、ピン19をピン用孔から抜くことで、その保持状態を解除できるように構成されている。
【0028】
(抵抗棒)
図1,3に示すように、後アーム10の中央部には、側面視への字形状に屈曲形成した丸棒材からなり、後アーム10を後向き姿勢にして操縦ハンドル8を下方操作したときに接地する抵抗体としての抵抗棒20が連結されている。
なお、図1の2点鎖線で示すように、抵抗棒20は、後アーム10が後向き姿勢のとき、後アーム10との連結部側である一方側が上下向きになり、そして、接地する端部を備える他方側が前傾姿勢となるように後アーム10に取り付けられている。
また、図1の実線で示すように、抵抗棒20は、後アーム10が下向き姿勢のとき、一方側が前後向きになり、そして、他方側が前下がり姿勢となるように後アーム10に取り付けられており、他方側の端部は、左右一対の耕耘ロータ4の間に位置し、かつ、耕耘ロータ4の回転軌跡の最下点と伝動ケース12の底部との間に位置する。
【0029】
(ロータカバー、モータカバー)
図1乃至図4に示すように、ロータカバー5は、耕耘ロータ4の左右方向の幅よりも幅広に形成されてあり、耕耘ロータ4の上方を覆うようにして機体フレーム3の上方に配備され、中央部フレーム13にボルト連結して支持されている。
また、ロータカバー5は、前部と後部に開口が形成されてあり、ロータカバー5を中央部フレーム13に連結すると、電動モータ6の上部とバッテリ7の上部とが、夫々対応する開口から突出して露出するように構成されている。
モータカバー23は、ロータカバー5の開口から露出した電動モータ6の上部を覆うようにして配備され、ロータカバー5に連結及び取り外し自在に係合できるように構成されている。
【0030】
(収納ケース)
図1,3,4に示すように、収納ケース21は、上部開放型の箱体に形成されている。
また、収納ケース21の底部には、耕耘ロータ4を下方から収納したときに伝動ケース12の下部を支持する支持台21Aが、上向きに膨出形成されている。さらに、収納ケース21の左右上部には、ロータカバー5の左右側部に取り付け及び取り外し自在にするためのバックル式の固定具21Bが備えられている。
つまり、収納ケース21は、伝動ケース12の下部とロータカバー5とを、支持台21Aと固定具21Bとで挟みこむことによって、ロータカバー5の下部に固定することができるように構成されている。
収納ケース21の後部には、後アーム10が下向き姿勢のときに左右一対の耕耘ロータ4の間に位置する抵抗棒20が収納されるように、上端から所定の高さ位置まで切り欠きが形成されている。
【0031】
(フロントガード)
図1乃至図4に示すように、伝動ケース12の上部には、フロントガード22が、前方に延出するように取り付けられている。
フロントガード22は、平面視C字状に形成された丸パイプ材からなる環状部材22Aの一対の先端部に、前後向きの一対の縦平板材からなる支持部材22Bの前部を夫々溶接固定して構成されており、伝動ケース12の上部に、支持部材22Bをボルト連結することで支持されている。
【0032】
なお、図1,3に示すように、一対の支持部材22Bは、側面視においてフロントガード22が逆への字状となるように環状部材22Aに溶接されている。また、右側の支持部材22Bは、その後部が左側の支持部材22Bの後部の上下位置よりも上方に位置するように姿勢設定されている。
また、右側の支持部材22Bには、後述のように着脱機構30を用いて支持装置2を歩行型作業機1に連結するときに、着脱機構30の着脱用ピン32Aが挿通される連結孔22Cが左右方向に貫通して形成されている。そして、左側の支持部材22Bには、後述のように着脱機構30を用いて支持装置2を歩行型作業機1に連結するときに、着脱機構30の着脱用ボルト32Bが挿通される連結凹部22Dが左右方向に貫通して下方から形成されている。
【0033】
(歩行型作業機による作用効果)
上記構成の歩行型作業機1は、操縦ハンドル8を操縦姿勢にし、後アーム10を下向き姿勢にして後輪9を接地させることで、操縦ハンドル8を握りながら、後輪9を用いて移動操作させることができる。
このとき、歩行型作業機1に収納ケース21を取り付けておくと、収納ケース21が耕耘ロータ4の周囲を囲うガードとなり、硬い地面などに耕耘ロータ4が接触して損傷する虞を抑制することができる。また、歩行型作業機1を車の荷台など(積込位置)に車載するとき、耕耘ロータ4に付着している土などが剥がれ落ちても、土が収納ケース21によって受け止められ、積込位置が土などで汚れる虞を抑制することもできるので好適である。
さらに、歩行型作業機1を積込位置の後側まで移動させた後に、積込位置に車載するとき、操縦ハンドル8を非操縦姿勢にしておくと、歩行型作業機1を上下方向及び前後方向にコンパクトにすることができるので好適である。
【0034】
(歩行型作業機の支持装置の全体構成)
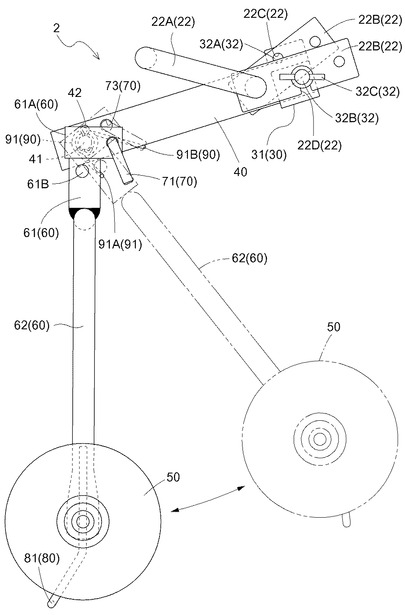
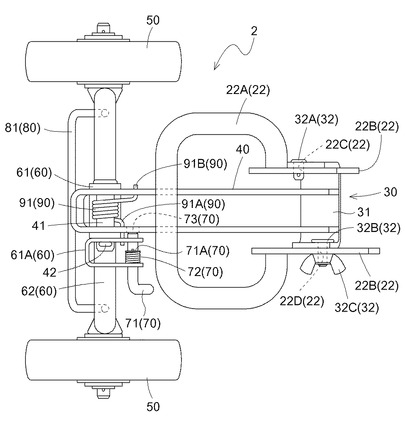
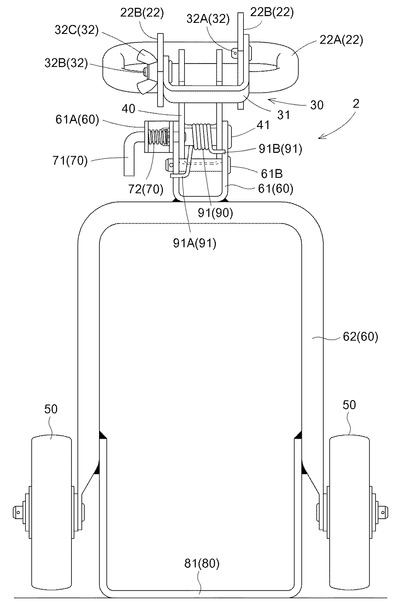
図1,図2,図5乃至図7に示すように、歩行型作業機1の前部に連結され、接地することで歩行型作業機1の前側を支持することが可能な本発明の支持装置2は、支持装置2の主な骨格となる主フレーム40と、主フレーム40を歩行型作業機1の前部に連結及び取り外し自在とする着脱機構30と、左右一対の車輪からなる前輪50と、主フレーム40に前後揺動自在に軸支してあり、かつ、左右一対の前輪50を遊端部に支持する前アーム60とで構成されている。
【0035】
(主フレーム)
図1,図2,図5乃至図7に示すように、主フレーム40は、帯状板材を屈曲させて平面視U字状に形成してなり、左右一対の側部の長さが、主フレーム40の前側である屈曲側端部の横幅よりも長くなるように構成されている。
【0036】
(着脱機構)
図1,図2,図5乃至図7に示すように、着脱機構30は、主フレーム40に備えられてあり、主フレーム40の後部に固定してある着脱フレーム31と、歩行型作業機1の前部に相当するフロントガード22に、主フレーム40を着脱フレーム31を介して連結及び取り外し可能とする着脱手段32とで構成されている。
【0037】
具体的には、着脱フレーム31は、帯状板材を屈曲させて、右側部が左側部よりも長くなるように背面視J字状に形成してなり、下部上面を主フレーム40の一対の後端部下面に溶接して固定されている。
そして、着脱手段32は、着脱フレーム31の右側上端部に左右向きに形成された貫通穴に内嵌固定されている着脱用ピン32Aと、左側上端部に左右向きに形成された貫通孔に内嵌固定されている着脱用ボルト32Bと、着脱用ボルト32Bのネジ部に螺合可能な着脱用蝶ナット32Cとで構成してある。着脱用ピン32Aと、着脱用ボルト32Bとは、左方向に突出するように各貫通穴に設けられており、着脱用蝶ナット32Cは、着脱用ボルト32Bのネジ部に左方から螺合可能である。
なお、着脱用ピン32Aと着脱用ボルト32Bとは、後述のように、着脱機構30によって支持装置2を歩行型作業機1に連結するとき、フロントガード22の右側の支持部材22Bの連結孔22Cと左側の支持部材22Cの連結凹部22Dとに、夫々を挿入できるような位置に設けられている。
【0038】
(前アーム)
図1,2,図5乃至図7に示すように、前アーム60は、主フレーム40に前後揺動自在に軸支してある揺動フレーム61と、揺動フレーム61に固定してあるブラケット61Aと、揺動フレーム61に固定してあり、かつ、一対の前輪50を先端部に支持してある支持フレーム62とを備えて構成されている。
【0039】
具体的には、図5乃至図7に示すように、揺動フレーム61は、帯状板材を屈曲させて背面視U字状に形成してなる。
ブラケット61Aは、帯状板材を屈曲させて平面視U字状に形成してなり、側面視において揺動フレーム61に略直交するように、揺動フレーム61の左側上端部外側面に溶接固定されている。なお、このときブラケット61Aは、左右一対の側部後端部が、側面視において揺動フレーム61と重ならないようにされている。
支持フレーム62は、正面視逆U字状に屈曲形成した丸パイプ材からなり、上部の左右方向中央部を揺動フレーム61の下面に溶接固定されている。
【0040】
(前アームと主フレーム)
主フレーム40の左右一対の側部前側と、揺動フレーム61の左右一対の上端部と、ブラケット61Aの右側部前側とには、左右方向に並べることのできる貫通穴が形成されている。図5乃至図7に示すように、これらの貫通穴には、鍔付きの主軸41が右方から挿入されている。そして、主軸41は、先端部において主軸41の半径方向に形成された貫通穴に、割ピン42が挿通されることで両持ち状に支持されている。
即ち、揺動フレーム61とブラケット61Aと支持フレーム62とは、主軸41によって、主フレーム40に対して一体的に前後揺動自在に軸支されている。
これによって、前アーム60は、図1の実線及び図5の実線で示す状態のように、後述の揺動制限手段によってそれ以上前方へ揺動できない状態である前側の使用姿勢と、図1の2点鎖線及び図5の2点鎖線で示す状態のように、後述のロック機構70によって使用姿勢よりも後側の位置で保持されている状態である後側の格納姿勢と、に亘って前後揺動することができる。
【0041】
(前輪)
左右一対の前輪50は、前アーム60の遊端部に相当する支持フレーム62の左右一対の下端部に、左右方向周りに回転自在に軸支されている。
即ち、一対の前輪50は、前アーム60とともに主フレーム40に対して前後揺動することができるように構成されている。
【0042】
(揺動制限手段)
上記構成の支持装置2には、主フレーム40に対する前アーム60の前方揺動を制限する揺動制限手段が備えられている。
図5,図7に示すように、揺動制限手段は、揺動フレーム61の左右一対の側部間に亘って両持ち状に支持されているピン61Bであり、図1の実線及び図5の実線で示す状態のように、前アーム60が前側の使用姿勢まで揺動されると、ピン61Bが主フレーム40の下面に当接し、それ以上前方へ前アーム60が揺動できないように構成されている。
【0043】
(バネ機構)
上記構成の支持装置2には、前アーム60を使用姿勢に保持するバネ機構90が備えられている。
図5乃至図7に示すように、バネ機構90は、主軸41に外嵌してある捻りバネ91であり、捻りバネ91は、一端91Bを主フレーム40の右側部下面に当接し、他端91Aを揺動フレーム61の左側部後面に当接するようにして構成されている。
即ち、前アーム60は、後向きの外力が加わらないとき、バネ機構90の捻りバネ91の作用によって前側の使用姿勢に揺動付勢されている。
【0044】
(ロック機構)
上記構成の支持装置2は、前アーム60を前側の使用姿勢から後側の格納姿勢に揺動したとき、自動的に前アーム60を後側の格納姿勢で保持するロック機構70を備えられている。
図5乃至図7に示すように、ロック機構70は、ブラケット61Aに設けられているL字状のロックピン71と、ロックピン71を主フレーム40の側に付勢する圧縮バネ72と、ロックピン71を抜き挿し可能なように主フレーム40に形成された係合孔73とで構成されている。
【0045】
具体的には、ブラケット61Aの一対の側部後端部(揺動フレーム61と側面視において重なっていない部分)のうち、前アーム60が前側の使用姿勢と後側の格納姿勢とに亘って前後揺動するときに側面視において主フレーム40と常に重なっている位置に、貫通穴が左右向きに対向して形成されており、この対向する貫通穴にロックピン71が内嵌されている。
圧縮バネ72は、ロックピン71のうちブラケット61Aの一対の側部間に位置する部分に突設されている突出部71Aと、ブラケット61Aの左側部とに亘るようにして、ロックピン71に外嵌されている。即ち、圧縮バネ72は、ロックピン71を主フレーム40の側に付勢するように備えられている。
【0046】
主フレーム40の係合孔73は、前アーム60が格納姿勢になったとき、ロックピン71の主フレーム40の側の端部と側面視において重なるような位置に形成されている。
つまり、ロック機構70は、前アーム60が使用姿勢から格納姿勢に向けて揺動するときにおいては、ロックピン71が圧縮バネ72の付勢作用によって主フレーム40の外側面に付勢され、そして、前アーム60が格納姿勢になったときにおいては、ロックピン71が圧縮バネ72の付勢作用によって係合孔73に挿通され、係合させることで前アーム60を格納姿勢で保持できるように構成されている。
これによると、ロックピン71が圧縮バネ72の付勢作用に抗して係合孔73から抜かれることで、前アーム60を格納姿勢で保持した状態から解除できる。
【0047】
(ロック機構とバネ機構)
上記構成によると、ロックピン71が係合孔73から抜かれることで、前アーム60が格納姿勢で保持された状態から解除されると、前アーム60は、バネ機構90によって自動的に使用姿勢に揺動することになる。
【0048】
(車輪持上げ機構)
上記構成の支持装置2には、前輪50を接地させながら前アーム60を格納姿勢にするとき、前輪50をその接する面から持ち上げる車輪持ち上げ機構80が備えられている。
図1,2,図5乃至図7に示すように、車輪持ち上げ機構80は、側面視への字形状、かつ、背面視U字状に屈曲形成した丸棒材からなる持上げ部材81を、前アーム60の支持フレーム62に備えることで構成されている。
【0049】
具体的に言うと、持上げ部材81は、その一対の上端部を支持フレーム62の一対の下端部に溶接し、左右一対の前輪50の間に位置するように固定されている。このとき、図1に示す状態において、持上げ部材81の上部である支持フレーム62との連結部側は、側面視において支持フレーム62と平行であり、持上げ部材81の下部である接地部側は、側面視において支持フレーム62に対して前下がり傾斜であるように姿勢設定されている。
そのため、持上げ部材81の下部は、後述のように支持装置2が歩行型作業機1の前部に取り付けられた状態で、前アーム60が使用姿勢のときには、図1の実線及び図5の実線で示すように接地せず、前アーム60が格納姿勢のときには、図1の2点鎖線及び図5の2点鎖線で示すように接地することになる。
つまり、車輪持上げ機構80は、前アーム60が前側の使用姿勢から後側の格納姿勢に向けて揺動するにつれて、持上げ部材80が接地し、格納姿勢のときには前輪50がその接する面から持ち上げられているように構成されている。
【0050】
(歩行型作業機への支持装置の連結及び取り外し)
上記構成の支持装置2は、主フレーム40に着脱機構30が備えられているので、以下のようにして歩行型作業機1の前部に相当するフロントガード22に連結することができる。
まず、着脱フレーム31に備えられている着脱用ピン32Aをフロントガード22の右側の支持部材22Bの連結孔22Cに挿通するとともに、着脱用ボルト32Bを左側の支持部材22Bの連結凹部22Dに挿通する。その後、着脱用ボルト32Bのネジ部に着脱用ナット32Cを螺合して、着脱フレーム31を支持部材22Bに締め付け固定する。これによって、着脱機構30を介して、主フレーム40、前アーム60、前輪50などから構成される支持装置2を歩行型作業機1の前部に連結することができる。
また、着脱用蝶ナット32Cを着脱用ボルト32Bのネジ部からゆるめて外し、着脱用ピン32Aと着脱用ボルト32Bとを、夫々連結孔22Cと連結凹部22Dから抜くことで、歩行型作業機1から支持装置2を取り外すこともできる。
【0051】
(上記構成の支持装置による作用効果など)
収納ケース21を取り付けてある歩行型作業機1は、上記のようにしてフロントガード22に支持装置2が連結された状態において、前アーム60が使用姿勢にされ、後アーム10が下向き姿勢にされたとき、左右の前輪50と後輪9とが接地して、収納ケース21が地面から浮き上がった状態となる。即ち、歩行型作業機1は、接地した2つの前輪50と1つの後輪9とで3点支持されている状態となるので、歩行型作業機1から手を離しても横転することがない。
上記状態の歩行型作業機1は、操縦姿勢にした操縦ハンドル8を握りながら、接地した左右の前輪50と後輪9とを用いて移動操作することができる。
【0052】
上記移動操作によって、積込位置の後側に移動された歩行型作業機1は、以下のようにして積込位置に車載することができる。
まず、操縦ハンドル8を下方操作することで、歩行型作業機1の前側と支持装置2とを後輪9の回転軸芯周りに上方揺動させ、左右の前輪50を積込位置の高さまで浮き上がらせて積込位置に載せる。
【0053】
次に、操縦ハンドル8を非操縦姿勢に姿勢変更した後、積込位置に載せた左右の前輪50をてこの原理の支点としながら、歩行型作業機1を積込位置の高さまで手で持ち上げる。
【0054】
最後に、積込位置の前方にある壁等(例えばシートバック)に左右の前輪50を当接させながら、持ち上げた歩行型作業機1を前進させることで、バネ機構90の付勢作用に抗して、自動的に前アーム60を前側の使用姿勢から後側の格納姿勢に姿勢変更させながら、歩行型作業機1を積込位置に車載することができる。
このとき、前アーム60は、格納姿勢になると共に、ロック機構70によって自動的に保持され、また、左右の前輪50は、前アーム60が格納姿勢になると共に、接地した車輪持上げ機構80の持上げ部材81によって、自動的に床面から持ち上げられる。
即ち、支持装置2を連結した歩行型作業機1は、積込位置において、接地した車輪持上げ機構80の持上げ部材81がブレーキとなり、動き難くなった状態で車載することができる。
【0055】
本実施形態において、左側あるいは右側に配置するというように記載している構成(例えば連結孔22C,連結凹部22D,着脱用ピン32A,着脱用ボルト32B,着脱用蝶ナット32C,ブラケット61A,ロック機構70,捻りバネ91の一端91B及び他端91A等)や、右方あるいは左方から挿入するというように記載している構成(例えば主軸41等)があるが、これらは場合に応じて左右を逆にしてもよく、本実施形態のように限定されるものではない。
【0056】
〔別実施形態〕
〔実施例1〕
本実施形態において、歩行型作業機1の支持装置2は、主フレーム40に、前アーム60を前後揺動自在に軸支して構成してあるが、前アーム60を主フレーム40に沿って摺動自在に支持する構成にしてもよい。
【0057】
〔実施例2〕
本実施形態において、歩行型作業機1の耕耘ロータ4は、電動モータ6で駆動するように構成してあるが、エンジンによって駆動するように構成してもよい。
【0058】
〔実施例3〕
本実施形態において、ロック機構70は、前アーム60が格納姿勢になると、自動的に前アーム60を格納姿勢に保持するように構成してあるが、圧縮バネ72を備えず、手動によってロックピン71を係合孔73に挿通するように構成してもよい。
【0059】
〔実施例4〕
本実施形態において、車輪持上げ機構80は、前アーム60が前側の使用姿勢から後側の格納姿勢に向けて揺動するにつれて、持上げ部材81が接地し、自動的に左右の前輪50を持ち上げるように構成してあるが、前アーム60を格納姿勢にした後、持上げ部材81の接地を手動によって切り替えることで、左右の前輪50を持ち上げるように構成してもよい。
【0060】
〔実施例5〕
〔発明を実施するための形態〕、〔別実施形態〕の〔実施例1〕乃至〔実施例4〕においては、下部に耕耘ロータ4を備え、耕耘ロータ4の後方に車輪(後輪9)を備える歩行型作業機1の前部に支持装置2を取り付ける例を示したが、支持装置2の取り付けは、下部に車輪を備え、車輪の後方に耕耘ロータを備え、車輪の上方にエンジンが配備されている歩行型作業機等にも同様に適用できる。
【産業上の利用可能性】
【0061】
本発明は、歩行型作業機に取り付けられる支持装置に適用することができる。
【符号の説明】
【0062】
1 歩行型作業機
2 支持装置
9 後輪
22 フロントガード
30 着脱機構
40 主フレーム
50 車輪(前輪)
60 アーム(前アーム)
70 ロック機構
80 車輪持上げ機構
90 バネ機構
【技術分野】
【0001】
本発明は、歩行型作業機に連結及び取り外し自在である、歩行型作業機の支持装置に関する。
【背景技術】
【0002】
歩行型作業機としては、後部に操縦ハンドル、下部に耕耘ロータを備えてあり、操縦ハンドルを握りながら歩行型作業機を移動操作し、耕耘ロータで地面を耕すことができるようにしたものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−115067号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記構成の歩行型作業機を車の荷台等に車載する場合、使用者は、操縦ハンドルを握りながら歩行型作業機を荷台等の後側まで移動操作させた後、操縦ハンドルから手を離し、歩行型作業機を手で掴んで持ち上げながら荷台等に積み込むことになる。
しかし、このとき使用者は、重い歩行型作業機の全重量を手で支えなければならず重労働であった。
【0005】
本発明の目的は、歩行型作業機を車のトランクや荷台等(以下、積込位置と称する)に楽に車載できるようにすることにある。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、歩行型作業機の支持装置において次のように構成することにある。
歩行型作業機の前部に対して連結及び取り外し自在な着脱機構を備える主フレームと、
前記主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアームと、
前記アームの下端部に回転自在に軸支されている車輪と、を備えてある。
【0007】
(作用及び発明の効果)
本発明の第1特徴を備える支持装置は、着脱機構によって歩行型作業機の前部に連結することができるように構成してあり、さらに、主フレームに支持されているアームの下端部に車輪を軸支してある。
これによると、例えば、後方下部に後輪と、後方上部に操縦ハンドルとを備えてある歩行型作業機の前部に、本発明の特徴を備える支持装置を連結すると、使用者は、操縦ハンドルを握りながら、支持装置の車輪と後輪とを用いてこの歩行型作業機を移動操作し、積込位置の後側まで移動させることができる。
また、使用者は、積込位置の後側に歩行型作業機を移動操作した後、操縦ハンドルを下方操作することで、歩行型作業機の前側と支持装置とを後輪の回転軸芯周りに上方揺動させ、支持装置の車輪を積込位置の高さまで浮き上がらせて積込位置に載せることができる。
さらに、使用者は、積込位置に載せた支持装置の車輪をてこの原理の支点としながら、歩行型作業機を積込位置の高さまで手で持ち上げることができる。即ち、上記のようにして歩行型作業機を手で持ち上げるとき、積込位置に載せた車輪が歩行型作業機の重量の一部を支持してくれるので、歩行型作業機の全重量を手だけで支えながら持ち上げる場合に比して、使用者は歩行型作業機を楽な力で持ち上げることができ、そのまま支持装置の車輪を用いて前進させれば、積込位置に歩行型作業機を楽な力で車載することができる。
【0008】
次に、本発明の第1特徴を備える支持装置は、車輪を下端部に軸支してあるアームを、主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持してある。
これによると、例えば、上記のように操縦ハンドルを下方操作して支持装置の車輪を積込位置に載せるとき、アームを前側の使用姿勢にしておくと、前側の使用姿勢よりも後ろ側の姿勢に設定しているときに比べて車輪は高く浮き上がるので、容易に積込位置に載せることができる。
また、上記のように、アームが使用姿勢にされている状態で支持装置の車輪を積込位置に載せた後、その車輪を支点としながら歩行型作業機を手で持ち上げ、そのまま車輪を用いて前進させて積込位置に車載するとき、アームを後側の格納姿勢に移動させることで支持装置の全長を短くすることができるので、積込位置が狭い場合においても歩行型作業機を車載し易い。
【0009】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の歩行型作業機の支持装置において次のように構成することにある。
前記アームを前記使用姿勢に付勢するバネ機構と、
前記アームを前記格納姿勢で保持及び解除自在なロック機構と、を備えてある。
【0010】
(作用及び発明の効果)
本発明の第2特徴を備える支持装置は、アームを使用姿勢に付勢するバネ機構を備えてある。
このバネ機構を備える支持装置を歩行型作業機に連結し、上記のように、アームが使用姿勢にされている状態で支持装置の車輪を積込位置に載せた後、その車輪を支点としながら歩行型作業機を手で持ち上げ、そのまま車輪を用いて前進させて積込位置に車載するとき、車輪を積込位置の前方にある壁等(例えばシートバック)に当接させながら歩行型作業機を前進させると、バネ機構の付勢作用に抗して、自動的にアームが使用姿勢から格納姿勢に姿勢変更する。即ち、支持装置の全長が自動的に短くなるので、使用者は、支持装置を連結しながらも歩行型作業機を狭い積込位置に楽に車載することができる。
【0011】
また、本発明の第2特徴を備える支持装置は、アームを格納姿勢で保持及び解除自在なロック機構を備えてある。
これによると、上記のように歩行型作業機を積込位置に車載したとき、ロック機構によってアームを格納姿勢で保持しておけば、積込位置において歩行型作業機の向きが変わり、車輪がシートバック等から離れることがあっても、バネ機構の付勢作用によってアームが使用姿勢に姿勢変更されることがないので、支持装置の全長を常に短い状態で保持しておくことができ、積込位置において歩行型作業機が占有するスペースが大きくなることを抑制できる。
【0012】
[III]
(構成)
本発明の第3特徴は、本発明の第1又は第2特徴の歩行型作業機の支持装置において次のように構成することにある。
前記アームが前記格納姿勢になると、自動的に前記アームを前記格納姿勢で保持するように前記ロック機構を構成してある。
【0013】
(作用及び発明の効果)
本発明の第3特徴によると、アームは、格納姿勢になるとロック機構によって自動的に格納姿勢の状態を保持される。
これによると、上記のように、積込位置において、車輪を積込位置の前方にある壁等(例えばシートバック)に当接させながら歩行型作業機を前進させ、自動的にアームを使用姿勢から格納姿勢に姿勢変更させるとき、ロック機構によって自動的にアームを格納姿勢で保持することができるので、狭い積込位置に歩行型作業機を更に楽に車載することができる。
【0014】
[IV]
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の歩行型作業機の支持装置のうちのいずれか一つにおいて次のように構成することにある。
前記アームが前記格納姿勢において、前記車輪を前記車輪が接する面から持ち上げる車輪持上げ機構を備える。
【0015】
(作用及び発明の効果)
本発明の第4特徴によると、支持装置のアームを格納姿勢にしたとき、車輪がその接する面から車輪持上げ機構によって持ち上げられる。
従って、使用者は、積込位置において、支持装置のアームを格納姿勢にすることにより、車輪を車輪持上げ機構によって持ち上げ、歩行型作業機を動かないようにして車載することができる。
【図面の簡単な説明】
【0016】
【図1】歩行型作業機に取り付けた状態の支持装置を示す側面図である。
【図2】歩行型作業機に取り付けた状態の支持装置を示す平面図である。
【図3】歩行型作業機を示す側面図である。
【図4】歩行型作業機の収納ケースなどの構成を示す要部の一部縦断正面図である。
【図5】歩行型作業機のフロントガードと支持装置とを示す側面図である。
【図6】歩行型作業機のフロントガードと支持装置とを示す平面図である。
【図7】歩行型作業機のフロントガードと支持装置とを示す背面図である。
【発明を実施するための形態】
【0017】
(歩行型作業機の全体構成)
図1乃至図4に示すように、本実施形態で例示する歩行型作業機1は、歩行型作業機1の主な骨格となる機体フレーム3の下部に、地面を耕すための左右一対の耕耘ロータ4が備えられている。
また、歩行型作業機1は、機体フレーム3の上部に、左右一対の耕耘ロータ4の上方を覆うロータカバー5と、耕耘ロータ4を駆動する電動モータ6と、電動モータ6の上方を覆うモータカバー23と、電動モータ6に給電するバッテリ7と、歩行型作業機1を使用するときの把持部として使用可能な操縦ハンドル8と、が備えられている。
さらに、歩行型作業機1は、機体フレーム3の前部に、歩行型作業機1を持ち運ぶ際に把持部として使用可能なフロントガード22が備えられ、機体フレーム3の後端部に、後輪9を支持する後アーム10が前後揺動自在に軸支されている。
そして、歩行型作業機1は、耕耘ロータ4を下方から収納可能な収納ケース21をロータカバー5の下部に取り付け及び取り外し自在にしてある。
【0018】
(機体フレーム)
図1,3に示すように、機体フレーム3は、機体フレーム3の前側部分である伝動ケース12と、中央部分である中央部フレーム13と、後側部分である後部フレーム14と、中央部フレーム13及び後部フレーム14の間に位置し、かつ、操縦ハンドル8を前後揺動自在に支持してあるハンドルフレーム15と、を連結して構成されている。
【0019】
(伝動ケース、耕耘ロータ、電動モータ)
図1,3に示すように、内部中空の伝動ケース12は、側面視L字状に形成されてあり、その上端部に形成されているフランジ部12Aの上面に、電動モータ6が配置されている。伝動ケース12の内部には、電動モータ6の出力軸(図示せず)と、出力軸に連結する入力軸(図示せず)を備えるウォーム減速機(図示せず)が内蔵されている。図4に示すように、ウォーム減速機には、伝動ケース12の下端部から左右方向に延出する出力軸16Bが備えられてあり、左右の出力軸16Bには、夫々に対応する左右一対の耕耘ロータ4が一体回転可能なように連結されている。
【0020】
(中央部フレーム)
図1,3に示すように、中央部フレーム13は、前方延出端部13Aが伝動ケース12の上部にボルト連結され、下方延出端部13Bが伝動ケース12の下部にボルト連結されることで、伝動ケース12に支持されている。
【0021】
(バッテリ)
図1乃至図3に示すように、バッテリ7は、中央部フレーム13の上面に配置されており、バッテリ7と電動モータ6とを接続する電線(図示せず)によって、電動モータ6に給電するようにしてある。
【0022】
(ハンドルフレーム)
図1乃至図4に示すように、ハンドルフレーム15は、背面視U字状に屈曲形成された丸パイプ材からなる第一部材15Aと、一直線状の丸パイプ材からなる第二部材15Bとを備え、第一部材15Aの一対の上端部に、第二部材15Bの両端部を夫々溶接固定して構成されている。そして、ハンドルフレーム15は、第一部材15Aの下部左右中央部を中央部フレーム13の後端部に溶接して、後傾斜姿勢になるように固定されている。
【0023】
(操縦ハンドル)
図1乃至図3に示すように、操縦ハンドル8は、側面視への字状に屈曲形成した左右一対の丸パイプ材からなるハンドル部材8Aの中央部を、一直線状の丸パイプ材からなる接続部材8Bで接続し、そして、ハンドル部材8Aの両上端部に、使用者が歩行型作業機1を使用するときに握る部分となるゴム製のグリップ8Cを嵌めて構成されている。
【0024】
(操縦ハンドルとハンドルフレーム)
図1乃至図3に示すように、ハンドルフレーム15の第二部材15Bと、第二部材15Bの両端部を挟むようにして位置する操縦ハンドル8の一対の下端部とには、左方からボルト17が挿通されている。これによって、操縦ハンドル8は、ハンドルフレーム15に、前後揺動自在に軸支されている。
ボルト17の右端部には、第二部材15Bの右端部にハンドル部材8Aの下端部を締め付けるための締付手段としてのノブ付きナット18が螺合されている。つまり、操縦ハンドル8は、ノブ付きナット18の締付作用によって、ハンドルフレーム15に対する揺動姿勢を保持及び解除可能にされている。従って、操縦ハンドル8は、図1に示すような、歩行型作業機1を操縦するときに用いる操縦姿勢(ハンドルフレーム15に対して後方に揺動した状態)と、図3に示すような、積込位置において歩行型作業機1をコンパクトにするときに用いる非操縦姿勢(ハンドルフレーム15に対して前方に揺動した状態)と、で保持することができる。
【0025】
(後部フレーム)
図1,3に示すように、ハンドルフレーム15の第一部材15Aの下部左右中央部には、後部フレーム14が前端部を溶接固定されており、後方へ延出するように支持されている。
【0026】
(後アームと後輪)
図1,3に示すように、後部フレーム14の延出端部には、後輪9を支持する後アーム10が後部フレーム14に対して前後揺動自在に軸支されている。
後輪9は、後アーム10の遊端部に、左右方向周りに回転自在に軸支されている。
【0027】
(後アームの保持手段)
図1,3に示すように、後アーム10と後部フレーム14とには、後アーム10の揺動姿勢を保持及び解除自在とする保持手段が備えられている。
保持手段は、後アーム10の基端部側に左右向きに形成された貫通穴に摺動可能に内嵌されているピン19と、後部フレーム14の延出端部に左右向きに形成されてあり、前記ピン19の先端部を抜き挿し自在である複数のピン用孔(図示しない)とで構成されている。そして、複数のピン用孔は、後アーム10が、図1の実線及び図3で示す状態のように、後輪9を接地させるときに用いる下向き姿勢と、図1の2点鎖線で示す状態のように、後輪9を接地させないときに用いる後向き姿勢とになったとき、ピン19と側面視において重なるような位置に形成されている。
つまり、保持手段は、ピン19とピン用孔とが側面視において重なったときに、ピン19をピン用孔に挿通して係合させることで、後アーム10を下向き姿勢又は後向き姿勢で保持でき、また、ピン19をピン用孔から抜くことで、その保持状態を解除できるように構成されている。
【0028】
(抵抗棒)
図1,3に示すように、後アーム10の中央部には、側面視への字形状に屈曲形成した丸棒材からなり、後アーム10を後向き姿勢にして操縦ハンドル8を下方操作したときに接地する抵抗体としての抵抗棒20が連結されている。
なお、図1の2点鎖線で示すように、抵抗棒20は、後アーム10が後向き姿勢のとき、後アーム10との連結部側である一方側が上下向きになり、そして、接地する端部を備える他方側が前傾姿勢となるように後アーム10に取り付けられている。
また、図1の実線で示すように、抵抗棒20は、後アーム10が下向き姿勢のとき、一方側が前後向きになり、そして、他方側が前下がり姿勢となるように後アーム10に取り付けられており、他方側の端部は、左右一対の耕耘ロータ4の間に位置し、かつ、耕耘ロータ4の回転軌跡の最下点と伝動ケース12の底部との間に位置する。
【0029】
(ロータカバー、モータカバー)
図1乃至図4に示すように、ロータカバー5は、耕耘ロータ4の左右方向の幅よりも幅広に形成されてあり、耕耘ロータ4の上方を覆うようにして機体フレーム3の上方に配備され、中央部フレーム13にボルト連結して支持されている。
また、ロータカバー5は、前部と後部に開口が形成されてあり、ロータカバー5を中央部フレーム13に連結すると、電動モータ6の上部とバッテリ7の上部とが、夫々対応する開口から突出して露出するように構成されている。
モータカバー23は、ロータカバー5の開口から露出した電動モータ6の上部を覆うようにして配備され、ロータカバー5に連結及び取り外し自在に係合できるように構成されている。
【0030】
(収納ケース)
図1,3,4に示すように、収納ケース21は、上部開放型の箱体に形成されている。
また、収納ケース21の底部には、耕耘ロータ4を下方から収納したときに伝動ケース12の下部を支持する支持台21Aが、上向きに膨出形成されている。さらに、収納ケース21の左右上部には、ロータカバー5の左右側部に取り付け及び取り外し自在にするためのバックル式の固定具21Bが備えられている。
つまり、収納ケース21は、伝動ケース12の下部とロータカバー5とを、支持台21Aと固定具21Bとで挟みこむことによって、ロータカバー5の下部に固定することができるように構成されている。
収納ケース21の後部には、後アーム10が下向き姿勢のときに左右一対の耕耘ロータ4の間に位置する抵抗棒20が収納されるように、上端から所定の高さ位置まで切り欠きが形成されている。
【0031】
(フロントガード)
図1乃至図4に示すように、伝動ケース12の上部には、フロントガード22が、前方に延出するように取り付けられている。
フロントガード22は、平面視C字状に形成された丸パイプ材からなる環状部材22Aの一対の先端部に、前後向きの一対の縦平板材からなる支持部材22Bの前部を夫々溶接固定して構成されており、伝動ケース12の上部に、支持部材22Bをボルト連結することで支持されている。
【0032】
なお、図1,3に示すように、一対の支持部材22Bは、側面視においてフロントガード22が逆への字状となるように環状部材22Aに溶接されている。また、右側の支持部材22Bは、その後部が左側の支持部材22Bの後部の上下位置よりも上方に位置するように姿勢設定されている。
また、右側の支持部材22Bには、後述のように着脱機構30を用いて支持装置2を歩行型作業機1に連結するときに、着脱機構30の着脱用ピン32Aが挿通される連結孔22Cが左右方向に貫通して形成されている。そして、左側の支持部材22Bには、後述のように着脱機構30を用いて支持装置2を歩行型作業機1に連結するときに、着脱機構30の着脱用ボルト32Bが挿通される連結凹部22Dが左右方向に貫通して下方から形成されている。
【0033】
(歩行型作業機による作用効果)
上記構成の歩行型作業機1は、操縦ハンドル8を操縦姿勢にし、後アーム10を下向き姿勢にして後輪9を接地させることで、操縦ハンドル8を握りながら、後輪9を用いて移動操作させることができる。
このとき、歩行型作業機1に収納ケース21を取り付けておくと、収納ケース21が耕耘ロータ4の周囲を囲うガードとなり、硬い地面などに耕耘ロータ4が接触して損傷する虞を抑制することができる。また、歩行型作業機1を車の荷台など(積込位置)に車載するとき、耕耘ロータ4に付着している土などが剥がれ落ちても、土が収納ケース21によって受け止められ、積込位置が土などで汚れる虞を抑制することもできるので好適である。
さらに、歩行型作業機1を積込位置の後側まで移動させた後に、積込位置に車載するとき、操縦ハンドル8を非操縦姿勢にしておくと、歩行型作業機1を上下方向及び前後方向にコンパクトにすることができるので好適である。
【0034】
(歩行型作業機の支持装置の全体構成)
図1,図2,図5乃至図7に示すように、歩行型作業機1の前部に連結され、接地することで歩行型作業機1の前側を支持することが可能な本発明の支持装置2は、支持装置2の主な骨格となる主フレーム40と、主フレーム40を歩行型作業機1の前部に連結及び取り外し自在とする着脱機構30と、左右一対の車輪からなる前輪50と、主フレーム40に前後揺動自在に軸支してあり、かつ、左右一対の前輪50を遊端部に支持する前アーム60とで構成されている。
【0035】
(主フレーム)
図1,図2,図5乃至図7に示すように、主フレーム40は、帯状板材を屈曲させて平面視U字状に形成してなり、左右一対の側部の長さが、主フレーム40の前側である屈曲側端部の横幅よりも長くなるように構成されている。
【0036】
(着脱機構)
図1,図2,図5乃至図7に示すように、着脱機構30は、主フレーム40に備えられてあり、主フレーム40の後部に固定してある着脱フレーム31と、歩行型作業機1の前部に相当するフロントガード22に、主フレーム40を着脱フレーム31を介して連結及び取り外し可能とする着脱手段32とで構成されている。
【0037】
具体的には、着脱フレーム31は、帯状板材を屈曲させて、右側部が左側部よりも長くなるように背面視J字状に形成してなり、下部上面を主フレーム40の一対の後端部下面に溶接して固定されている。
そして、着脱手段32は、着脱フレーム31の右側上端部に左右向きに形成された貫通穴に内嵌固定されている着脱用ピン32Aと、左側上端部に左右向きに形成された貫通孔に内嵌固定されている着脱用ボルト32Bと、着脱用ボルト32Bのネジ部に螺合可能な着脱用蝶ナット32Cとで構成してある。着脱用ピン32Aと、着脱用ボルト32Bとは、左方向に突出するように各貫通穴に設けられており、着脱用蝶ナット32Cは、着脱用ボルト32Bのネジ部に左方から螺合可能である。
なお、着脱用ピン32Aと着脱用ボルト32Bとは、後述のように、着脱機構30によって支持装置2を歩行型作業機1に連結するとき、フロントガード22の右側の支持部材22Bの連結孔22Cと左側の支持部材22Cの連結凹部22Dとに、夫々を挿入できるような位置に設けられている。
【0038】
(前アーム)
図1,2,図5乃至図7に示すように、前アーム60は、主フレーム40に前後揺動自在に軸支してある揺動フレーム61と、揺動フレーム61に固定してあるブラケット61Aと、揺動フレーム61に固定してあり、かつ、一対の前輪50を先端部に支持してある支持フレーム62とを備えて構成されている。
【0039】
具体的には、図5乃至図7に示すように、揺動フレーム61は、帯状板材を屈曲させて背面視U字状に形成してなる。
ブラケット61Aは、帯状板材を屈曲させて平面視U字状に形成してなり、側面視において揺動フレーム61に略直交するように、揺動フレーム61の左側上端部外側面に溶接固定されている。なお、このときブラケット61Aは、左右一対の側部後端部が、側面視において揺動フレーム61と重ならないようにされている。
支持フレーム62は、正面視逆U字状に屈曲形成した丸パイプ材からなり、上部の左右方向中央部を揺動フレーム61の下面に溶接固定されている。
【0040】
(前アームと主フレーム)
主フレーム40の左右一対の側部前側と、揺動フレーム61の左右一対の上端部と、ブラケット61Aの右側部前側とには、左右方向に並べることのできる貫通穴が形成されている。図5乃至図7に示すように、これらの貫通穴には、鍔付きの主軸41が右方から挿入されている。そして、主軸41は、先端部において主軸41の半径方向に形成された貫通穴に、割ピン42が挿通されることで両持ち状に支持されている。
即ち、揺動フレーム61とブラケット61Aと支持フレーム62とは、主軸41によって、主フレーム40に対して一体的に前後揺動自在に軸支されている。
これによって、前アーム60は、図1の実線及び図5の実線で示す状態のように、後述の揺動制限手段によってそれ以上前方へ揺動できない状態である前側の使用姿勢と、図1の2点鎖線及び図5の2点鎖線で示す状態のように、後述のロック機構70によって使用姿勢よりも後側の位置で保持されている状態である後側の格納姿勢と、に亘って前後揺動することができる。
【0041】
(前輪)
左右一対の前輪50は、前アーム60の遊端部に相当する支持フレーム62の左右一対の下端部に、左右方向周りに回転自在に軸支されている。
即ち、一対の前輪50は、前アーム60とともに主フレーム40に対して前後揺動することができるように構成されている。
【0042】
(揺動制限手段)
上記構成の支持装置2には、主フレーム40に対する前アーム60の前方揺動を制限する揺動制限手段が備えられている。
図5,図7に示すように、揺動制限手段は、揺動フレーム61の左右一対の側部間に亘って両持ち状に支持されているピン61Bであり、図1の実線及び図5の実線で示す状態のように、前アーム60が前側の使用姿勢まで揺動されると、ピン61Bが主フレーム40の下面に当接し、それ以上前方へ前アーム60が揺動できないように構成されている。
【0043】
(バネ機構)
上記構成の支持装置2には、前アーム60を使用姿勢に保持するバネ機構90が備えられている。
図5乃至図7に示すように、バネ機構90は、主軸41に外嵌してある捻りバネ91であり、捻りバネ91は、一端91Bを主フレーム40の右側部下面に当接し、他端91Aを揺動フレーム61の左側部後面に当接するようにして構成されている。
即ち、前アーム60は、後向きの外力が加わらないとき、バネ機構90の捻りバネ91の作用によって前側の使用姿勢に揺動付勢されている。
【0044】
(ロック機構)
上記構成の支持装置2は、前アーム60を前側の使用姿勢から後側の格納姿勢に揺動したとき、自動的に前アーム60を後側の格納姿勢で保持するロック機構70を備えられている。
図5乃至図7に示すように、ロック機構70は、ブラケット61Aに設けられているL字状のロックピン71と、ロックピン71を主フレーム40の側に付勢する圧縮バネ72と、ロックピン71を抜き挿し可能なように主フレーム40に形成された係合孔73とで構成されている。
【0045】
具体的には、ブラケット61Aの一対の側部後端部(揺動フレーム61と側面視において重なっていない部分)のうち、前アーム60が前側の使用姿勢と後側の格納姿勢とに亘って前後揺動するときに側面視において主フレーム40と常に重なっている位置に、貫通穴が左右向きに対向して形成されており、この対向する貫通穴にロックピン71が内嵌されている。
圧縮バネ72は、ロックピン71のうちブラケット61Aの一対の側部間に位置する部分に突設されている突出部71Aと、ブラケット61Aの左側部とに亘るようにして、ロックピン71に外嵌されている。即ち、圧縮バネ72は、ロックピン71を主フレーム40の側に付勢するように備えられている。
【0046】
主フレーム40の係合孔73は、前アーム60が格納姿勢になったとき、ロックピン71の主フレーム40の側の端部と側面視において重なるような位置に形成されている。
つまり、ロック機構70は、前アーム60が使用姿勢から格納姿勢に向けて揺動するときにおいては、ロックピン71が圧縮バネ72の付勢作用によって主フレーム40の外側面に付勢され、そして、前アーム60が格納姿勢になったときにおいては、ロックピン71が圧縮バネ72の付勢作用によって係合孔73に挿通され、係合させることで前アーム60を格納姿勢で保持できるように構成されている。
これによると、ロックピン71が圧縮バネ72の付勢作用に抗して係合孔73から抜かれることで、前アーム60を格納姿勢で保持した状態から解除できる。
【0047】
(ロック機構とバネ機構)
上記構成によると、ロックピン71が係合孔73から抜かれることで、前アーム60が格納姿勢で保持された状態から解除されると、前アーム60は、バネ機構90によって自動的に使用姿勢に揺動することになる。
【0048】
(車輪持上げ機構)
上記構成の支持装置2には、前輪50を接地させながら前アーム60を格納姿勢にするとき、前輪50をその接する面から持ち上げる車輪持ち上げ機構80が備えられている。
図1,2,図5乃至図7に示すように、車輪持ち上げ機構80は、側面視への字形状、かつ、背面視U字状に屈曲形成した丸棒材からなる持上げ部材81を、前アーム60の支持フレーム62に備えることで構成されている。
【0049】
具体的に言うと、持上げ部材81は、その一対の上端部を支持フレーム62の一対の下端部に溶接し、左右一対の前輪50の間に位置するように固定されている。このとき、図1に示す状態において、持上げ部材81の上部である支持フレーム62との連結部側は、側面視において支持フレーム62と平行であり、持上げ部材81の下部である接地部側は、側面視において支持フレーム62に対して前下がり傾斜であるように姿勢設定されている。
そのため、持上げ部材81の下部は、後述のように支持装置2が歩行型作業機1の前部に取り付けられた状態で、前アーム60が使用姿勢のときには、図1の実線及び図5の実線で示すように接地せず、前アーム60が格納姿勢のときには、図1の2点鎖線及び図5の2点鎖線で示すように接地することになる。
つまり、車輪持上げ機構80は、前アーム60が前側の使用姿勢から後側の格納姿勢に向けて揺動するにつれて、持上げ部材80が接地し、格納姿勢のときには前輪50がその接する面から持ち上げられているように構成されている。
【0050】
(歩行型作業機への支持装置の連結及び取り外し)
上記構成の支持装置2は、主フレーム40に着脱機構30が備えられているので、以下のようにして歩行型作業機1の前部に相当するフロントガード22に連結することができる。
まず、着脱フレーム31に備えられている着脱用ピン32Aをフロントガード22の右側の支持部材22Bの連結孔22Cに挿通するとともに、着脱用ボルト32Bを左側の支持部材22Bの連結凹部22Dに挿通する。その後、着脱用ボルト32Bのネジ部に着脱用ナット32Cを螺合して、着脱フレーム31を支持部材22Bに締め付け固定する。これによって、着脱機構30を介して、主フレーム40、前アーム60、前輪50などから構成される支持装置2を歩行型作業機1の前部に連結することができる。
また、着脱用蝶ナット32Cを着脱用ボルト32Bのネジ部からゆるめて外し、着脱用ピン32Aと着脱用ボルト32Bとを、夫々連結孔22Cと連結凹部22Dから抜くことで、歩行型作業機1から支持装置2を取り外すこともできる。
【0051】
(上記構成の支持装置による作用効果など)
収納ケース21を取り付けてある歩行型作業機1は、上記のようにしてフロントガード22に支持装置2が連結された状態において、前アーム60が使用姿勢にされ、後アーム10が下向き姿勢にされたとき、左右の前輪50と後輪9とが接地して、収納ケース21が地面から浮き上がった状態となる。即ち、歩行型作業機1は、接地した2つの前輪50と1つの後輪9とで3点支持されている状態となるので、歩行型作業機1から手を離しても横転することがない。
上記状態の歩行型作業機1は、操縦姿勢にした操縦ハンドル8を握りながら、接地した左右の前輪50と後輪9とを用いて移動操作することができる。
【0052】
上記移動操作によって、積込位置の後側に移動された歩行型作業機1は、以下のようにして積込位置に車載することができる。
まず、操縦ハンドル8を下方操作することで、歩行型作業機1の前側と支持装置2とを後輪9の回転軸芯周りに上方揺動させ、左右の前輪50を積込位置の高さまで浮き上がらせて積込位置に載せる。
【0053】
次に、操縦ハンドル8を非操縦姿勢に姿勢変更した後、積込位置に載せた左右の前輪50をてこの原理の支点としながら、歩行型作業機1を積込位置の高さまで手で持ち上げる。
【0054】
最後に、積込位置の前方にある壁等(例えばシートバック)に左右の前輪50を当接させながら、持ち上げた歩行型作業機1を前進させることで、バネ機構90の付勢作用に抗して、自動的に前アーム60を前側の使用姿勢から後側の格納姿勢に姿勢変更させながら、歩行型作業機1を積込位置に車載することができる。
このとき、前アーム60は、格納姿勢になると共に、ロック機構70によって自動的に保持され、また、左右の前輪50は、前アーム60が格納姿勢になると共に、接地した車輪持上げ機構80の持上げ部材81によって、自動的に床面から持ち上げられる。
即ち、支持装置2を連結した歩行型作業機1は、積込位置において、接地した車輪持上げ機構80の持上げ部材81がブレーキとなり、動き難くなった状態で車載することができる。
【0055】
本実施形態において、左側あるいは右側に配置するというように記載している構成(例えば連結孔22C,連結凹部22D,着脱用ピン32A,着脱用ボルト32B,着脱用蝶ナット32C,ブラケット61A,ロック機構70,捻りバネ91の一端91B及び他端91A等)や、右方あるいは左方から挿入するというように記載している構成(例えば主軸41等)があるが、これらは場合に応じて左右を逆にしてもよく、本実施形態のように限定されるものではない。
【0056】
〔別実施形態〕
〔実施例1〕
本実施形態において、歩行型作業機1の支持装置2は、主フレーム40に、前アーム60を前後揺動自在に軸支して構成してあるが、前アーム60を主フレーム40に沿って摺動自在に支持する構成にしてもよい。
【0057】
〔実施例2〕
本実施形態において、歩行型作業機1の耕耘ロータ4は、電動モータ6で駆動するように構成してあるが、エンジンによって駆動するように構成してもよい。
【0058】
〔実施例3〕
本実施形態において、ロック機構70は、前アーム60が格納姿勢になると、自動的に前アーム60を格納姿勢に保持するように構成してあるが、圧縮バネ72を備えず、手動によってロックピン71を係合孔73に挿通するように構成してもよい。
【0059】
〔実施例4〕
本実施形態において、車輪持上げ機構80は、前アーム60が前側の使用姿勢から後側の格納姿勢に向けて揺動するにつれて、持上げ部材81が接地し、自動的に左右の前輪50を持ち上げるように構成してあるが、前アーム60を格納姿勢にした後、持上げ部材81の接地を手動によって切り替えることで、左右の前輪50を持ち上げるように構成してもよい。
【0060】
〔実施例5〕
〔発明を実施するための形態〕、〔別実施形態〕の〔実施例1〕乃至〔実施例4〕においては、下部に耕耘ロータ4を備え、耕耘ロータ4の後方に車輪(後輪9)を備える歩行型作業機1の前部に支持装置2を取り付ける例を示したが、支持装置2の取り付けは、下部に車輪を備え、車輪の後方に耕耘ロータを備え、車輪の上方にエンジンが配備されている歩行型作業機等にも同様に適用できる。
【産業上の利用可能性】
【0061】
本発明は、歩行型作業機に取り付けられる支持装置に適用することができる。
【符号の説明】
【0062】
1 歩行型作業機
2 支持装置
9 後輪
22 フロントガード
30 着脱機構
40 主フレーム
50 車輪(前輪)
60 アーム(前アーム)
70 ロック機構
80 車輪持上げ機構
90 バネ機構
【特許請求の範囲】
【請求項1】
歩行型作業機の前部に対して連結及び取り外し自在な着脱機構を備える主フレームと、
前記主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアームと、
前記アームの下端部に回転自在に軸支されている車輪と、を備える歩行型作業機の支持装置。
【請求項2】
前記アームを前記使用姿勢に付勢するバネ機構と、
前記アームを前記格納姿勢で保持及び解除自在なロック機構と、を備える請求項1に記載の歩行型作業機の支持装置。
【請求項3】
前記アームが前記格納姿勢になると、自動的に前記アームを前記格納姿勢で保持するように前記ロック機構を構成してある請求項2に記載の歩行型作業機の支持装置。
【請求項4】
前記アームが前記格納姿勢において、前記車輪を前記車輪が接する面から持ち上げる車輪持上げ機構を備える請求項1から3の何れかに記載の歩行型作業機の支持装置。
【請求項1】
歩行型作業機の前部に対して連結及び取り外し自在な着脱機構を備える主フレームと、
前記主フレームに、前側の使用姿勢と後側の格納姿勢とに亘って前後移動自在に支持されているアームと、
前記アームの下端部に回転自在に軸支されている車輪と、を備える歩行型作業機の支持装置。
【請求項2】
前記アームを前記使用姿勢に付勢するバネ機構と、
前記アームを前記格納姿勢で保持及び解除自在なロック機構と、を備える請求項1に記載の歩行型作業機の支持装置。
【請求項3】
前記アームが前記格納姿勢になると、自動的に前記アームを前記格納姿勢で保持するように前記ロック機構を構成してある請求項2に記載の歩行型作業機の支持装置。
【請求項4】
前記アームが前記格納姿勢において、前記車輪を前記車輪が接する面から持ち上げる車輪持上げ機構を備える請求項1から3の何れかに記載の歩行型作業機の支持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−85507(P2013−85507A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228122(P2011−228122)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]