
歩行型管理機
【課題】抵抗棒、尾輪、及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできる歩行型管理機を提案する。
【解決手段】機体10の後部に取り付けられるとともに、後端に機体10の前後方向に延びた筒部22cを有する支持部20(取付部22)と、一端に抵抗棒30aが形成され、他端に尾輪31・31が支持され、中間部に支持軸34が設けられて、支持軸34が支持部20の筒部22cに回転可能に嵌装される回転フレーム30と、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能とする係止部材40と、を具備する歩行型管理機において、回転フレーム30の尾輪31・31側の端部に、畝立て器50を取り付けた。
【解決手段】機体10の後部に取り付けられるとともに、後端に機体10の前後方向に延びた筒部22cを有する支持部20(取付部22)と、一端に抵抗棒30aが形成され、他端に尾輪31・31が支持され、中間部に支持軸34が設けられて、支持軸34が支持部20の筒部22cに回転可能に嵌装される回転フレーム30と、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能とする係止部材40と、を具備する歩行型管理機において、回転フレーム30の尾輪31・31側の端部に、畝立て器50を取り付けた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は歩行型管理機に関し、より特定的には、機体に抵抗棒、尾輪、及び畝立て器を装着可能な歩行型管理機に関する。
【背景技術】
【0002】
従来、抵抗棒及び尾輪を機体に常時装着した状態にするとともに、抵抗棒と尾輪との使い分けを、簡易に、しかも迅速にできるようにした歩行型管理機が公知となっている。例えば、特許文献1に記載の如くである。
【0003】
特許文献1に開示されている歩行型管理機の機体の後部には、支持部が設けられている。該支持部には、前記機体の前後方向に延びる回転軸が回転可能に支持されている。該回転軸には、一端側に抵抗棒が形成され、他端側に尾輪が取り付けられた回転フレームの中間部が結合されている。そして、前記支持部には、前記回転フレームの回転規制と前後方向移動規制とを兼ねた規制体が設けられている。このような構成により、前記規制体を操作して前記回転フレームを反転させるだけで、該回転フレームを、「抵抗棒作用位置」と、「尾輪作用位置」と、のいずれかの位置に選択的に固定できるようにしている。
【0004】
なお、「抵抗棒作用位置」においては、前記抵抗棒を地面に接触させることができ、該抵抗棒の地面に対する抵抗で前記機体の走行速度を調整するとともに、前記抵抗棒を地中へ挿入する深さを調節することで耕耘深さを調節することができる。一方、「尾輪作用位置」においては、前記尾輪を地面に接触させることができ、前記歩行型管理機を作業場所に移動させたり、作業終了後に別の場所に移動させたりする場合に、前記尾輪を地面上において回転させることにより、前記機体を容易に移動させることができる。
【0005】
しかし、上記の構成の歩行型管理機では、耕耘作業とともに畝立て作業を行いたい場合には、前記回転フレームに培土器等の畝立て器を取り付ける必要があり、同様に、耕耘作業のみを行いたい場合には、当該畝立て器を取り外す必要があった。このため、畝立て器の着脱が面倒であり作業効率が悪く、しかも、前記回転フレームから取り外した畝立て器を別途保管しておく必要がある点においても煩わしかった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2743063号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は以上の如き状況に鑑みてなされたものであり、抵抗棒、尾輪、及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできるようにした歩行型管理機を提案する。
【課題を解決するための手段】
【0008】
請求項1に係る歩行型管理機は、機体の後部に取り付けられるとともに、後端に該機体の前後方向に延びた筒部を有する支持部と、一端に抵抗棒が形成され、他端に尾輪が支持され、中間部に支持軸が設けられて、該支持軸が前記支持部の筒部に回転可能に嵌装される回転フレームと、該回転フレームを前記支持部に対して相対回転不能かつ前後移動不能とする係止部材と、を具備する歩行型管理機において、前記回転フレームの尾輪側の端部に、畝立て器を取り付けたことを特徴とするものである。
【0009】
請求項2に係る歩行型管理機は、前記畝立て器は、前記回転フレームの尾輪側の端部に固定されるとともに、前記尾輪の前方に配置される畝成形板と、該畝成形板の板面に、該畝成形板の外郭からはみ出すように取り付けられた弾性体と、を備えるものである。
【0010】
請求項3に係る歩行型管理機は、前記機体の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸と、前記機体の後部から後上方に向かって延出されたハンドルと、をさらに具備し、前記尾輪及び前記畝立て器が前記支持軸の下方に配置される「畝立て・尾輪作用位置」において、前記畝立て器の下端は、前記尾輪の下端と略同じ高さに取り付けられ、前記尾輪を支点として前記ハンドルの後端を押し下げたとき、前記耕耘爪及び前記畝立て器が地面に接触しない状態にすることができるものである。
【発明の効果】
【0011】
本発明は、抵抗棒、尾輪及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできる、という効果を奏する。
【図面の簡単な説明】
【0012】
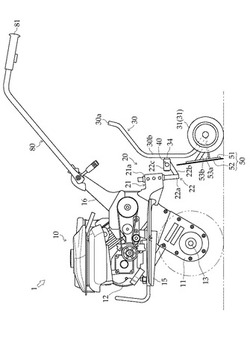
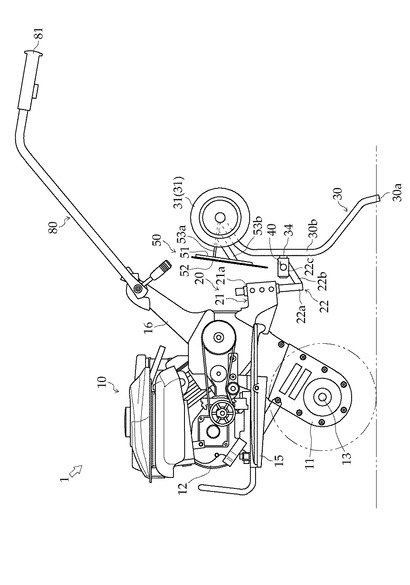
【図1】本発明の実施の一形態に係る歩行型管理機の全体的な構成を示す左側面図であり、回転フレームを「畝立て・尾輪作用位置」にした状態を示している。
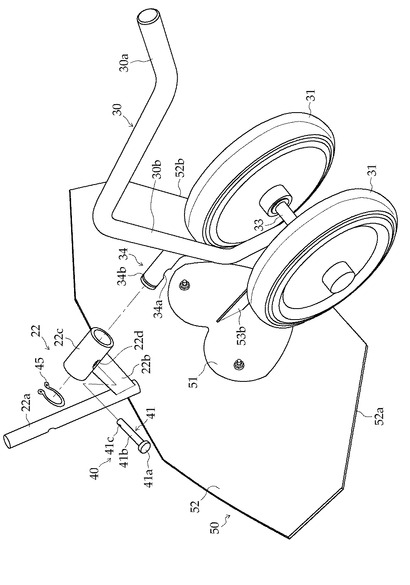
【図2】支持部及び回転フレームの構成を示す分解斜視図である。
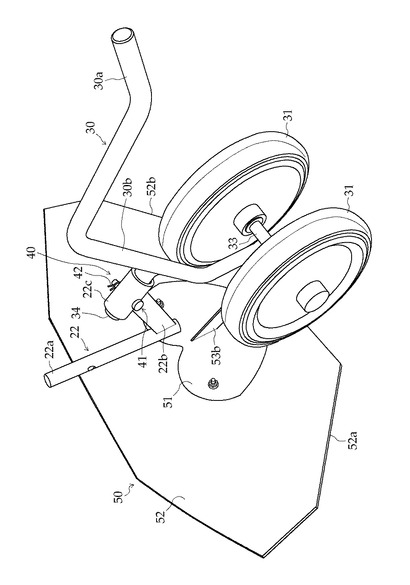
【図3】支持部、回転フレーム、及び係止部材の構成を示す斜視図である。
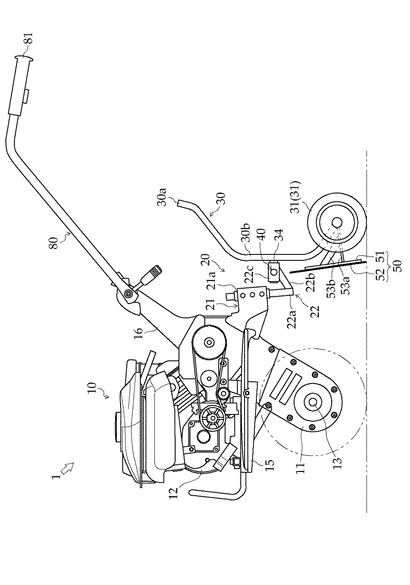
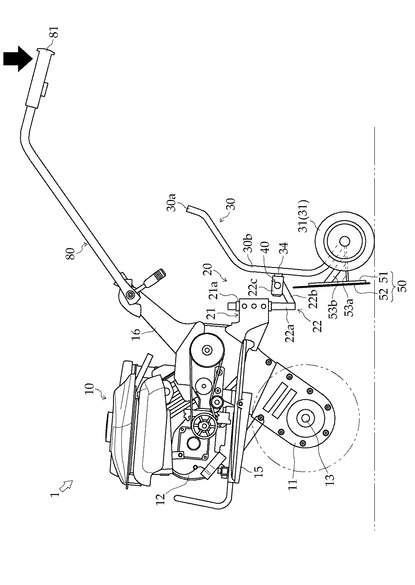
【図4】歩行型管理機の全体的な構成を示す左側面図であり、回転フレームを「抵抗棒作用位置」にした状態を示している。
【図5】ハンドルの後端を押し下げたときの状態を示す図であり、歩行型管理機を移動させるときの姿勢を示している。
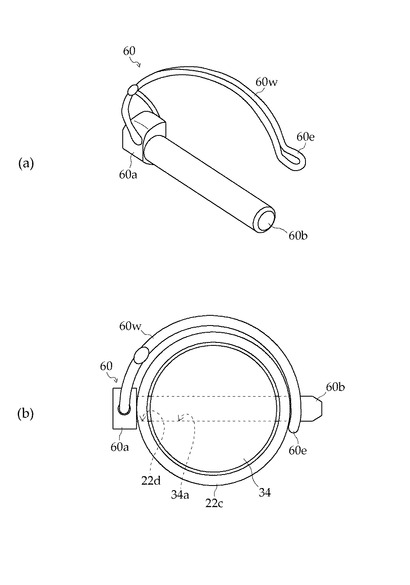
【図6】第二実施形態に係る係止部材の構成を示す図であり、(a)は係止部材の斜視図、(b)は係止部材を支持部及び支持軸に嵌装した状態を示す後面図である。
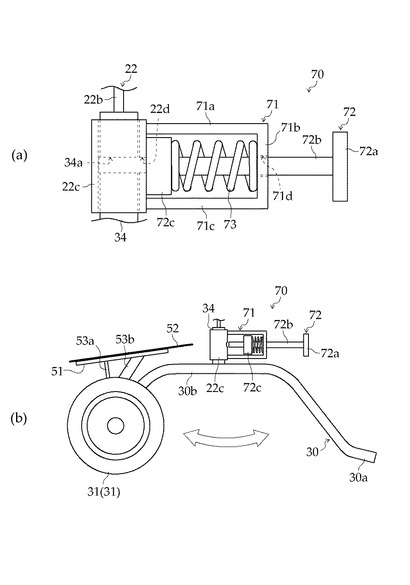
【図7】第三実施形態に係る係止部材の構成を示す図であり、(a)は係止部材の平面図、(b)は係止部材による支持部と支持軸との係止を解除したときの状態を示す説明図である。
【発明を実施するための形態】
【0013】
<第一実施形態>
まず初めに、本発明の実施の一形態である歩行型管理機1の全体的な構成について、図1を参照して説明する。なお、以下では、歩行型管理機1の前進方向を「前方」と定義して説明を行う。
【0014】
歩行型管理機1は、車軸作業型の歩行型管理機であり、耕耘作業や畝立て作業等の管理作業を行うことができる作業機である。歩行型管理機1は、ミッションケース11、エンジン12、作業軸13、支持部20、回転フレーム30、係止部材40、畝立て器50、及びハンドル80等を具備する。
【0015】
ミッションケース11は、トランスミッションを内装するケースであり、歩行型管理機1の主たる構造体の一つである。ミッションケース11の上部には、エンジンフレーム15を介してエンジン12が固定される。ミッションケース11の前下部には、作業軸13が回転可能に支持される。本実施形態においては、作業軸13上に、圃場を耕耘するための複数の耕耘爪(不図示)が固定される。ミッションケース11の後上部には、ハンドルフレーム16を介してハンドル80の前端部が取り付けられる。ハンドル80はハンドルフレーム16から後上方に向かって延出され、後端にグリップ81が設けられる。
【0016】
このような構成の歩行型管理機1において、エンジン12から得られた動力は、ミッションケース11内のトランスミッションで適宜に減速されて、作業軸13に伝達される。作業軸13が回転駆動すると、前記耕耘爪が作業軸13と一体的に回転し、走行しながら圃場を耕耘することができる。作業者は、機体10の後方においてハンドル80のグリップ81を把持して圃場を歩きながら、歩行型管理機1を走行及び耕耘作業させることができる。
なお、本明細書において「機体」(機体10)とは、ミッションケース11、エンジン12、燃料タンク、エンジンフレーム15、及びハンドルフレーム16等を合わせたものを指す。
【0017】
図1〜図3を参照して、支持部20の構成について詳細に説明する。
支持部20は、回転フレーム30を歩行型管理機1に取り付けるためのものであり、ヒッチ21及び取付部22等により構成される。
【0018】
ヒッチ21は、その前端部がミッションケース11の後部に固定される。ヒッチ21の後端部には、概ね上下方向に延びた円筒部21aが設けられる。
【0019】
取付部22は、円柱部22a、ステー部22b、及び筒部22cを有する。
【0020】
図2に示すように、円柱部22aは長い円柱形状の部分であり、ヒッチ21の円筒部21aに高さ調節可能に貫装される。
ステー部22bは概ね長方形状の板状の部分であり、前低後高となるように設けられる。ステー部22bの一端(前下部)は円柱部22aの下端と連続している。
【0021】
筒部22cは円筒形状の部分であり、ステー部22bの他端(後上部)に固定される。筒部22cは、歩行型管理機1の機体10の前後方向に延びた状態となるように配置される(図1参照)。換言すれば、筒部22cは、その軸線を機体10の前後方向に向けた状態となるように設けられる。
筒部22cの中途部には、後述の係止部材40を取り付けるための(より詳細には平頭ピン41の胴体部41bを貫装するための)貫装孔22dが形成される(図2参照)。貫装孔22dは、筒部22cを貫通するように設けられる。
【0022】
円柱部22aがヒッチ21の円筒部21aに貫装されることにより、取付部22が歩行型管理機1の機体10(厳密にはヒッチ21)に取り付けられる。なお、円筒部21aに対して円柱部22aを固定する位置を調節(高さを調節)することにより、筒部22cの上下位置を変更することができる。
【0023】
図1〜図3を参照して、回転フレーム30及び支持軸34の構成について詳細に説明する。
【0024】
回転フレーム30は、抵抗棒30aを構成するとともに、尾輪31・31及び畝立て器50を支持部20に取り付けるためのフレームであり、長い棒状の部材を側面視で略U字形状に折り曲げる等して形成されるものである。
【0025】
回転フレーム30の一端部は、抵抗棒30aを形成している。
回転フレーム30の他端部には、尾輪31及び畝立て器50が取り付けられる。詳述すると、回転フレーム30の他端部に、回転フレーム30と直交して左右水平方向となるように尾輪軸33(図2及び図3参照)の左右中央部が溶接等により固設される。尾輪軸33は円柱形状の部材であり、その両側に尾輪31・31が回転自在に支持される。
【0026】
回転フレーム30の中途部30b、すなわち一端部と他端部との間の部分は、概ね上下方向に延びている。回転フレーム30の中途部30bの中間部(中央部)には、円柱形状の支持軸34が、中途部30bに対して直交する方向に設けられる。支持軸34は、歩行型管理機1の機体10の前後方向に延びた状態となるように設けられ、その後端が回転フレーム30(の中途部30bの中間部)と連続している。
支持軸34は、取付部22の筒部22c(支持部20の後端)に回転可能に嵌装された後、後に詳述する係止部材40により、当該筒部22c(支持部20)に対して係止される。
【0027】
なお、支持軸34の中途部には、係止部材40を取り付けるための(より詳細には、平頭ピン41の胴体部41bを貫装するための)貫装孔34aが形成される。貫装孔34aは、支持軸34を貫通するように設けられる。
さらに、支持軸34の前部には、止め輪45を取り付けるためのリング状の止め輪溝34bが形成される。支持軸34を取付部22の筒部22c(支持部20の後端)に挿入した状態で、支持軸34の止め輪溝34bに止め輪45を取り付けることにより、支持軸34が筒部22cから脱落不能とされている。なお、本実施形態の止め輪45は市販のC型リングであるが、これに代えて、E型リング等の他の構成の止め輪を適用してもよい。
【0028】
本実施形態においては、回転フレーム30の中途部30b(中央部)に、円柱形状の部材を、溶接等の方法を用いて固定することにより、支持軸34が構成されている。ただし、支持軸が回転フレームと一体成形されている構成とすることもできる。
【0029】
図1〜図3を参照して、畝立て器50について詳細に説明する。
畝立て器50は、耕耘後の圃場に畝を形成するためのものであり、図1に示すように作業軸13と尾輪31・31との間に配置される。畝立て器50は、畝成形板51及びゴムカバー52を備える。
【0030】
畝成形板51は、前記耕耘爪により掘り起こされた圃場に沿って通過させることにより、耕耘後の圃場に溝(畝溝)を形成するものである。本実施形態の畝成形板51は、概ねハート型の板状の部材で構成される。畝成形板51は、取付ステー53a及び補強ステー53bを介して尾輪軸33に固定される。
取付ステー53aは板状の部材であり、前端が畝成形板51の下端部に溶接等で固設され、後端が尾輪軸33の左右中央に固定される。補強ステー53bは板状の部材であり、一端となる前上部が畝成形板51の上部後面の左右略中央に固設され、他端となる後下部が取付ステー53aの前後中途部の上面に固設される。こうして畝成形板51は、取付ステー53a及び補強ステー53bを介して、作業軸13の後方であり、かつ尾輪31・31の前方である位置に、取り付けられる。
【0031】
畝成形板51は、その板面が前下方に傾いた状態に配置され、支持軸34側に近づくほど左右幅が広くなり、尾輪31・31側に近づくほど左右幅が狭くなるように配置される。畝成形板51は、ゴムカバー52を介して、耕耘後の圃場に押し当てられる。
【0032】
ゴムカバー52は、本発明に係る「弾性体」の実施の一形態であり、ゴムにより形成される略八角形の平板状の部材である。ゴムカバー52の後面の左右中央部は、畝成形板51の前面にボルト等を用いて固定される。ゴムカバー52の左側、右側、及び上側は、畝成形板51の外郭から大きくはみ出している。本実施形態のゴムカバー52は、前記耕耘爪により耕された圃場の土を、該畝成形板51の左右両側に案内する役割を果たす。
【0033】
このような構成の畝成形板51及びゴムカバー52を耕耘後の圃場に作用させることにより、前記耕耘爪により耕された圃場に、畝成形板51の下部と略同じ形状の溝(畝溝)を形成するとともに当該溝の左右両側に土を盛って、畝を形成することができる。また、ゴムカバー52の下側左右両端部52a・52bが畝の側面になでつけられることにより、畝を崩れ難くすることができる。
【0034】
上記の如く構成される回転フレーム30、尾輪31、及び畝立て器50等を合わせたものが、一つのアッセンブリーとして、支持部20に取り付けられる。すなわち、尾輪31及び畝立て器50等を取り付けた回転フレーム30の支持軸34が、取付部22の筒部22cに嵌装される。また、係止部材40が具備されることにより、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能に係止することができる。ここで、回転フレーム30の位置は、「抵抗棒作用位置」(図4参照)と「畝立て・尾輪作用位置」(図1参照)とのいずれかの位置に選択的に固定される。
【0035】
図4に示す「抵抗棒作用位置」は、抵抗棒30aが支持軸34の下方に配置される位置であり、抵抗棒30aの下端部を地面(圃場)に接触させることが可能な位置である。
作業軸13を回転駆動して圃場を耕耘するとき、回転フレーム30の位置を「抵抗棒作用位置」にして、抵抗棒30aを地面に押し込む。このようにして、抵抗棒30aの地面に対する抵抗により耕耘作業時の機体10の走行速度を調節するとともに、抵抗棒30aを地中へ挿入する深さを調節することにより耕耘深さを調節することができる。
【0036】
図1に示す「畝立て・尾輪作用位置」は、尾輪31・31及び畝立て器50が支持軸34の下方に配置される位置であり、尾輪31・31及び畝立て器50を地面(圃場)に接触させることが可能な位置である。図1の状態において、尾輪31・31の下端と、畝立て器50の下端と、は略同じ高さとなる。
【0037】
歩行型管理機1を作業場所に移動させたり、作業終了後に別の場所に移動させたりするときに、回転フレーム30の位置を「畝立て・尾輪作用位置」にして、尾輪31・31を地面に接触させる。
すなわち、図5に示すように、作業者がハンドル80の後端のグリップ81を押し下げて尾輪31・31の下端を支点として歩行型管理機1全体を回転させると、尾輪31・31の下端及び畝立て器50の下端は略同じ高さとなるように取り付けられるため、作業軸13の前記耕耘爪及び畝立て器50を地面より上方に持ち上げることができる。この状態において、歩行型管理機1の機体10を前方または後方に押すと、尾輪31・31が地面上において回転(転動)し、機体10を小さな力でもって容易に移動させることができる。すなわち、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、畝立て器50の下端を尾輪31・31の下端よりも上方に持ち上げることができ(図5参照)、畝成形板51及びゴムカバー52が地面に接触しない状態にして歩行型管理機1を移動させることができる。
【0038】
また、作業軸13を回転駆動して圃場を耕耘すると同時に、畝立て器50を利用して圃場に畝を形成したいとき、換言すれば、耕耘作業とともに畝立て作業を行いたいとき、回転フレーム30の位置を「畝立て・尾輪作用位置」にして、尾輪31・31及び畝立て器50を地面側へ押し下げる(図1参照)。この状態において、歩行型管理機1の機体10を前進させると、尾輪31・31の下端及び畝立て器50の下端は略同じ高さとなるように取り付けられるため、耕耘された柔らかい土の中に、尾輪31・31及び畝立て器50が同時に入り込み、畝立て器50により耕耘後の圃場に畝を形成することができる。
【0039】
図2及び図3を参照して、係止部材40の構成について詳細に説明する。
本実施形態の係止部材40は、平頭ピン41及びRピン42を備える。
【0040】
図2に示す平頭ピン41は、頭部41aと胴体部41bとにより一体的に形成される部材である。頭部41aは、短い円柱形状の部分である。頭部41aの中央部からは、胴体部41bが突出される。胴体部41bの軸心は、頭部41aの軸心と同一軸心となるように設けられ、胴体部41bの径方向の寸法は、頭部41aの径方向の寸法よりも小さくなるように設けられる。胴体部41bの先端部(頭部41aとは反対側の端部)には、Rピン42を取り付けるためのピン孔41cが形成される。
【0041】
図3に示すRピン42は、線材を概ねR字形状に折り曲げて形成された部材であり、平頭ピン41の胴体部41bの外周面に沿う形状の湾曲部を有する。
【0042】
図1〜図4を参照して、回転フレーム30の位置を固定する方法、及び位置の変更方法について説明する。
【0043】
回転フレーム30の位置を「抵抗棒作用位置」(図4参照)に固定する場合、以下のように操作する。
すなわち、支持軸34を取付部22の筒部22cに嵌装した状態で、抵抗棒30aが下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から平頭ピン41の胴体部41bを貫装する。そして、筒部22cから右側方に突出された胴体部41bの先端部に、Rピン42を取り付ける。より具体的には、胴体部41bの先端部のピン孔41cにRピン42の一端部が挿入されるとともに、胴体部41bがRピン42の前記湾曲部に挟み込まれる。
当該Rピン42が取り付けられることにより、平頭ピン41が取付部22の筒部22cから脱落不能とされ、ひいては支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0044】
回転フレーム30の位置を「抵抗棒作用位置」(図4参照)から「畝立て・尾輪作用位置」(図1参照)に変更するとともに、「畝立て・尾輪作用位置」に固定する場合、以下のように操作する。
すなわち、Rピン42を平頭ピン41のピン孔41cから抜いた後、平頭ピン41の胴体部41bを筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、から抜く。そして、回転フレーム30を支持軸34を支点として上下に反転させて、尾輪31及び畝立て器50が下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から平頭ピン41の胴体部41bを貫装する。そして、筒部22cから右側方に突出された胴体部41bの先端部に、Rピン42を取り付ける。こうして、支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0045】
なお、回転フレーム30の位置を「畝立て・尾輪作用位置」(図1参照)から「抵抗棒作用位置」(図4参照)に変更する場合に関しても、上記と同様に、平頭ピン41及びRピン42を着脱するとともに、回転フレーム30を上下に反転させることにより、操作を行うことができる。
【0046】
以上の如く、本実施形態に係る歩行型管理機1は、機体10の後部に取り付けられるとともに、後端に機体10の前後方向に延びた筒部22cを有する支持部20(取付部22)と、一端に抵抗棒30aが形成され、他端に尾輪31・31が支持され、中間部に支持軸34が設けられて、支持軸34が支持部20の筒部22cに回転可能に嵌装される回転フレーム30と、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能とする係止部材40と、を具備する歩行型管理機において、回転フレーム30の尾輪31・31側の端部に、畝立て器50を取り付けたものである。
したがって、抵抗棒30a、尾輪31・31、及び畝立て器50を機体10に常時装着した状態にすることができるので、従来の培土器等のような畝立て器の着脱作業が不要となり、作業効率が向上される。
また、係止部材40を操作するとともに、回転フレーム30を適宜の位置まで回転させることにより、抵抗棒30aと尾輪31・31と畝立て器50の使い分けを、簡易に、しかも迅速にできる。
【0047】
また、本実施形態に係る歩行型管理機1に具備される畝立て器50は、回転フレーム30の尾輪31・31側の端部に固定されるとともに、尾輪31・31の前方に配置される畝成形板51と、畝成形板51の板面に、畝成形板51の外郭からはみ出すように取り付けられたゴムカバー52と、を備えるものである。
したがって、畝成形板51及びゴムカバー52を耕耘後の圃場に作用させることにより、圃場に畝成形板51の下部と略同じ形状の溝を形成するとともに、ゴムカバー52により当該溝の左右両側に土を案内し、畝を形成することができる。また、圃場の土が機体10の後上方に飛散することを防止するためのゴムカバー52を、畝立て器50の一部として用いることができるので、少ない部品点数で畝立て器50を構成することができる。
【0048】
また、本実施形態に係る歩行型管理機1に備えられる畝成形板51の左右幅は、支持軸34側に近づくほど広く、尾輪31・31側に近づくほど狭い、ものである。
したがって、畝成形板51を耕耘後の圃場に沿って通過させることにより、耕耘後の圃場に、下方に向かうに従って幅が狭くなる溝(畝溝)を形成することができる。また、従来の培土器のような畝立て器と比べて、極めて部品点数の少ない簡単な構成から成る畝立て器50で畝立て作業を行うことができ、歩行型管理機1全体の重量も大きくならず、また、製造コストの削減にも寄与し得る。
【0049】
また、本実施形態に係る歩行型管理機1に具備される係止部材40は、抵抗棒30aが支持軸34の下方に配置される「抵抗棒作用位置」と、回転フレーム30を支持軸34回りに「抵抗棒作用位置」から反転させた位置であって、尾輪31・31及び畝立て器50が支持軸34の下方に配置される「畝立て・尾輪作用位置」と、のいずれかの位置に、回転フレーム30の位置を係止することができるものである。
したがって、抵抗棒30aが地面に接触可能な「抵抗棒作用位置」と、尾輪31・31及び畝立て器50が地面に接触可能な「畝立て・尾輪作用位置」と、のいずれかの位置に、回転フレーム30の位置を選択的に係止することができるので、抵抗棒30aと、尾輪31・31及び畝立て器50と、の使い分けを簡易に、しかも迅速にできる。
【0050】
さらに、本実施形態に係る歩行型管理機1は、機体10の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸13と、機体10の後部から後上方に向かって延出されたハンドル80と、をさらに具備し、尾輪31・31及び畝立て器50が支持軸34の下方に配置される「畝立て・尾輪作用位置」において、畝立て器50の下端は、尾輪31・31の下端と略同じ高さに取り付けられ、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、前記耕耘爪及び畝立て器50が地面に接触しない状態にすることができるものである。
したがって、回転フレーム30を「畝立て・尾輪作用位置」にした場合において、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、前記耕耘爪及び畝立て器50の下端を尾輪31・31の下端よりも上方に持ち上げることができる。よって、前記耕耘爪及び畝立て器50が地面にすらない状態にして、尾輪31・31を用いて歩行型管理機1を移動させることができる。すなわち、畝立て器50と尾輪31・31との使い分けを簡易に、しかも迅速にできる。
【0051】
以上に本発明の好適な実施形態を示したが、上記の実施形態に代えて以下の構成とすることも可能である。
【0052】
<第二実施形態>
上記の実施形態の係止部材40に代えて、図6に示す係止部材60を備える構成としてもよい。
図6(a)に示す係止部材60は、いわゆるリンチピンであり、頭部60aと胴体部60bと湾曲バネ部60wとにより一体的に形成される部材である。頭部60aは、略直方体形状の部分である。頭部60aの中央部からは、胴体部60bが突出される。胴体部60bの軸心は、頭部60aの軸心と同一軸心となるように設けられ、胴体部60bの径方向の寸法は、頭部60aの径方向の寸法よりも小さくなるように設けられる。頭部60aからは湾曲バネ部60wが、胴体部60bの先端部側に向かって延出される。湾曲バネ部60wの先端部60eは、ループ状に形成されていて、当該ループ状の部分(先端部60e)を胴体部60bの先端部に引っ掛けることが可能である。
【0053】
係止部材60を用いて回転フレーム30の位置を「抵抗棒作用位置」または「畝立て・尾輪作用位置」に固定する場合、以下のように操作する。
すなわち、支持軸34を取付部22の筒部22c(の貫装孔22d)に嵌装した状態で、抵抗棒30aが上方または下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から係止部材60の胴体部60bを貫装する。そして、図6(b)に示すように、筒部22cから右側方に突出された胴体部60bの先端部に、係止部材60の湾曲バネ部60wの先端部60eを引っ掛ける。当該係止部材60が取り付けられることにより、係止部材60が取付部22の筒部22cから脱落不能とされ、ひいては支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0054】
このような構成の係止部材40を本発明に係る「係止部材」として採用した場合、市販のリンチピン等を用いて係止部材40を構成することができ、また、係止部材40の着脱が容易であり作業効率が向上される。
【0055】
<第三実施形態>
上記の実施形態の係止部材40または係止部材60に代えて、図7に示す係止部材70を備える構成としてもよい。
図7に示す係止部材70は、保持部材71、ロックピン72、及び圧縮バネ73を備える。
なお、第一実施形態及び第二実施形態においては、取付部22の筒部22cの中途部に、係止部材40(より詳細には平頭ピン41の胴体部41b)を貫装するための貫装孔22dが、筒部22cを左右に貫通するように設けられていた。この点、本実施形態においては、当該筒部22cの右側に貫装孔22dが形成されているだけで、当該筒部22cの左側には貫装孔が形成されていない(筒部22cを貫通していない)。このような点で、本実施形態の取付部22(支持部20)の構成は、第一実施形態及び第二実施形態の構成とは若干異なっている。
【0056】
保持部材71は、ロックピン72及び圧縮バネ73を取付部22(支持部20)の筒部22cの右側方に保持するための部材である。保持部材71は、前板71a、右側板71b、及び後板71cにより構成されていて、平面視において概ねコ字形状を有する。
保持部材71の右側板71bには、ロックピン72の胴体部72bを貫装するための貫装孔71dが形成される。該貫装孔71dは、側面視において、支持軸34の貫装孔34aの位置と一致するように設けられる。
保持部材71の前板71a、右側板71b、及び後板71cにより取り囲まれた空間は、圧縮バネ73を配置するスペースを成している。
【0057】
ロックピン72は、頭部72aと胴体部72bとにより一体的に形成される部材である。頭部72aは、短い円柱形状の部分である。頭部72aの中央部からは、胴体部72bが突出される。胴体部72bの軸心は、頭部72aの軸心と同一軸心となるように設けられ、胴体部72bの径方向の寸法は、頭部72aの径方向の寸法よりも小さくなるように設けられる。胴体部72bの中途部には、圧縮バネ73の一端(左端)を支持するための拡径部72cが形成される。拡径部72cは、胴体部72bの軸心と同一軸心となるように設けられ、拡径部72cの径方向の寸法は、胴体部72bの径方向の寸法よりも大きくなるように設けられる。
【0058】
圧縮バネ73は、ロックピン72の胴体部72bの先端部が、筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、に嵌装された状態に保持されるように、ロックピン72を付勢するものである。圧縮バネ73は、ロックピン72の拡径部72cと、保持部材71の右側板71bと、の間に介在される。
【0059】
圧縮バネ73が胴体部72bに嵌装された状態で、ロックピン72の胴体部72bが、右側板71bの貫装孔71d、筒部22cの貫装孔22d、及び支持軸34の貫装孔34aに挿入される。こうして、ロックピン72は、胴体部72bの先端部が筒部22cの貫装孔22dと、及び支持軸34の貫装孔34aと、に嵌装された状態とされていて、圧縮バネ73からの付勢力により筒部22cから脱落不能とされている。
このような構成の係止部材70を用いて、回転フレーム30の位置を「抵抗棒作用位置」(図4参照)または「畝立て・尾輪作用位置」(図1参照)に固定することができる。
【0060】
回転フレーム30の位置を「抵抗棒作用位置」から「畝立て・尾輪作用位置」に変更する場合、以下のように操作する。
すなわち、歩行型管理機1の作業者は、圧縮バネ73の付勢力に抗してロックピン72の頭部72aを右側方に引っ張ることにより、胴体部72bの先端部を筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、から引き抜く。こうすることより、回転フレーム30(支持軸34)が支持部20(筒部22c)に対して相対回転可能な状態となる。そして、回転フレーム30を支持軸34を支点として上下に反転させて、尾輪31及び畝立て器50が下方に配置される状態とする。この状態において、作業者はロックピン72の頭部72aを引っ張るのを止める。こうすることにより、ロックピン72の胴体部72bの先端部が、圧縮バネ73の付勢力に従って、貫装孔22d・34aに嵌装される。こうして、回転フレーム30の位置が「畝立て・尾輪作用位置」に固定される。
【0061】
なお、回転フレーム30の位置を「畝立て・尾輪作用位置」(図1参照)から「抵抗棒作用位置」(図4参照)に変更する場合に関しても、上記と同様に、ロックピン72の頭部72aを右側方に引っ張るとともに、回転フレーム30を上下に反転させることにより、操作を行うことができる。
【0062】
このような構成の係止部材70を本発明に係る「係止部材」として採用した場合、係止部材70による支持軸34(回転フレーム30)と筒部22c(支持部20)との係止を解除する操作が容易であり、作業効率が向上される。また、回転フレーム30を反転させるときに係止部材70を歩行型管理機1(厳密には保持部材71)から取り外す必要がないので、ロックピン72を紛失してしまう虞がない。
【符号の説明】
【0063】
1 歩行型管理機
10 機体
20 支持部
22c 筒部
30 回転フレーム
30a 抵抗棒
31 尾輪
34 支持軸
40 係止部材
50 畝立て器
51 畝成形板
52 ゴムカバー(弾性体)
80 ハンドル
【技術分野】
【0001】
本発明は歩行型管理機に関し、より特定的には、機体に抵抗棒、尾輪、及び畝立て器を装着可能な歩行型管理機に関する。
【背景技術】
【0002】
従来、抵抗棒及び尾輪を機体に常時装着した状態にするとともに、抵抗棒と尾輪との使い分けを、簡易に、しかも迅速にできるようにした歩行型管理機が公知となっている。例えば、特許文献1に記載の如くである。
【0003】
特許文献1に開示されている歩行型管理機の機体の後部には、支持部が設けられている。該支持部には、前記機体の前後方向に延びる回転軸が回転可能に支持されている。該回転軸には、一端側に抵抗棒が形成され、他端側に尾輪が取り付けられた回転フレームの中間部が結合されている。そして、前記支持部には、前記回転フレームの回転規制と前後方向移動規制とを兼ねた規制体が設けられている。このような構成により、前記規制体を操作して前記回転フレームを反転させるだけで、該回転フレームを、「抵抗棒作用位置」と、「尾輪作用位置」と、のいずれかの位置に選択的に固定できるようにしている。
【0004】
なお、「抵抗棒作用位置」においては、前記抵抗棒を地面に接触させることができ、該抵抗棒の地面に対する抵抗で前記機体の走行速度を調整するとともに、前記抵抗棒を地中へ挿入する深さを調節することで耕耘深さを調節することができる。一方、「尾輪作用位置」においては、前記尾輪を地面に接触させることができ、前記歩行型管理機を作業場所に移動させたり、作業終了後に別の場所に移動させたりする場合に、前記尾輪を地面上において回転させることにより、前記機体を容易に移動させることができる。
【0005】
しかし、上記の構成の歩行型管理機では、耕耘作業とともに畝立て作業を行いたい場合には、前記回転フレームに培土器等の畝立て器を取り付ける必要があり、同様に、耕耘作業のみを行いたい場合には、当該畝立て器を取り外す必要があった。このため、畝立て器の着脱が面倒であり作業効率が悪く、しかも、前記回転フレームから取り外した畝立て器を別途保管しておく必要がある点においても煩わしかった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2743063号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は以上の如き状況に鑑みてなされたものであり、抵抗棒、尾輪、及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできるようにした歩行型管理機を提案する。
【課題を解決するための手段】
【0008】
請求項1に係る歩行型管理機は、機体の後部に取り付けられるとともに、後端に該機体の前後方向に延びた筒部を有する支持部と、一端に抵抗棒が形成され、他端に尾輪が支持され、中間部に支持軸が設けられて、該支持軸が前記支持部の筒部に回転可能に嵌装される回転フレームと、該回転フレームを前記支持部に対して相対回転不能かつ前後移動不能とする係止部材と、を具備する歩行型管理機において、前記回転フレームの尾輪側の端部に、畝立て器を取り付けたことを特徴とするものである。
【0009】
請求項2に係る歩行型管理機は、前記畝立て器は、前記回転フレームの尾輪側の端部に固定されるとともに、前記尾輪の前方に配置される畝成形板と、該畝成形板の板面に、該畝成形板の外郭からはみ出すように取り付けられた弾性体と、を備えるものである。
【0010】
請求項3に係る歩行型管理機は、前記機体の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸と、前記機体の後部から後上方に向かって延出されたハンドルと、をさらに具備し、前記尾輪及び前記畝立て器が前記支持軸の下方に配置される「畝立て・尾輪作用位置」において、前記畝立て器の下端は、前記尾輪の下端と略同じ高さに取り付けられ、前記尾輪を支点として前記ハンドルの後端を押し下げたとき、前記耕耘爪及び前記畝立て器が地面に接触しない状態にすることができるものである。
【発明の効果】
【0011】
本発明は、抵抗棒、尾輪及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできる、という効果を奏する。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の一形態に係る歩行型管理機の全体的な構成を示す左側面図であり、回転フレームを「畝立て・尾輪作用位置」にした状態を示している。
【図2】支持部及び回転フレームの構成を示す分解斜視図である。
【図3】支持部、回転フレーム、及び係止部材の構成を示す斜視図である。
【図4】歩行型管理機の全体的な構成を示す左側面図であり、回転フレームを「抵抗棒作用位置」にした状態を示している。
【図5】ハンドルの後端を押し下げたときの状態を示す図であり、歩行型管理機を移動させるときの姿勢を示している。
【図6】第二実施形態に係る係止部材の構成を示す図であり、(a)は係止部材の斜視図、(b)は係止部材を支持部及び支持軸に嵌装した状態を示す後面図である。
【図7】第三実施形態に係る係止部材の構成を示す図であり、(a)は係止部材の平面図、(b)は係止部材による支持部と支持軸との係止を解除したときの状態を示す説明図である。
【発明を実施するための形態】
【0013】
<第一実施形態>
まず初めに、本発明の実施の一形態である歩行型管理機1の全体的な構成について、図1を参照して説明する。なお、以下では、歩行型管理機1の前進方向を「前方」と定義して説明を行う。
【0014】
歩行型管理機1は、車軸作業型の歩行型管理機であり、耕耘作業や畝立て作業等の管理作業を行うことができる作業機である。歩行型管理機1は、ミッションケース11、エンジン12、作業軸13、支持部20、回転フレーム30、係止部材40、畝立て器50、及びハンドル80等を具備する。
【0015】
ミッションケース11は、トランスミッションを内装するケースであり、歩行型管理機1の主たる構造体の一つである。ミッションケース11の上部には、エンジンフレーム15を介してエンジン12が固定される。ミッションケース11の前下部には、作業軸13が回転可能に支持される。本実施形態においては、作業軸13上に、圃場を耕耘するための複数の耕耘爪(不図示)が固定される。ミッションケース11の後上部には、ハンドルフレーム16を介してハンドル80の前端部が取り付けられる。ハンドル80はハンドルフレーム16から後上方に向かって延出され、後端にグリップ81が設けられる。
【0016】
このような構成の歩行型管理機1において、エンジン12から得られた動力は、ミッションケース11内のトランスミッションで適宜に減速されて、作業軸13に伝達される。作業軸13が回転駆動すると、前記耕耘爪が作業軸13と一体的に回転し、走行しながら圃場を耕耘することができる。作業者は、機体10の後方においてハンドル80のグリップ81を把持して圃場を歩きながら、歩行型管理機1を走行及び耕耘作業させることができる。
なお、本明細書において「機体」(機体10)とは、ミッションケース11、エンジン12、燃料タンク、エンジンフレーム15、及びハンドルフレーム16等を合わせたものを指す。
【0017】
図1〜図3を参照して、支持部20の構成について詳細に説明する。
支持部20は、回転フレーム30を歩行型管理機1に取り付けるためのものであり、ヒッチ21及び取付部22等により構成される。
【0018】
ヒッチ21は、その前端部がミッションケース11の後部に固定される。ヒッチ21の後端部には、概ね上下方向に延びた円筒部21aが設けられる。
【0019】
取付部22は、円柱部22a、ステー部22b、及び筒部22cを有する。
【0020】
図2に示すように、円柱部22aは長い円柱形状の部分であり、ヒッチ21の円筒部21aに高さ調節可能に貫装される。
ステー部22bは概ね長方形状の板状の部分であり、前低後高となるように設けられる。ステー部22bの一端(前下部)は円柱部22aの下端と連続している。
【0021】
筒部22cは円筒形状の部分であり、ステー部22bの他端(後上部)に固定される。筒部22cは、歩行型管理機1の機体10の前後方向に延びた状態となるように配置される(図1参照)。換言すれば、筒部22cは、その軸線を機体10の前後方向に向けた状態となるように設けられる。
筒部22cの中途部には、後述の係止部材40を取り付けるための(より詳細には平頭ピン41の胴体部41bを貫装するための)貫装孔22dが形成される(図2参照)。貫装孔22dは、筒部22cを貫通するように設けられる。
【0022】
円柱部22aがヒッチ21の円筒部21aに貫装されることにより、取付部22が歩行型管理機1の機体10(厳密にはヒッチ21)に取り付けられる。なお、円筒部21aに対して円柱部22aを固定する位置を調節(高さを調節)することにより、筒部22cの上下位置を変更することができる。
【0023】
図1〜図3を参照して、回転フレーム30及び支持軸34の構成について詳細に説明する。
【0024】
回転フレーム30は、抵抗棒30aを構成するとともに、尾輪31・31及び畝立て器50を支持部20に取り付けるためのフレームであり、長い棒状の部材を側面視で略U字形状に折り曲げる等して形成されるものである。
【0025】
回転フレーム30の一端部は、抵抗棒30aを形成している。
回転フレーム30の他端部には、尾輪31及び畝立て器50が取り付けられる。詳述すると、回転フレーム30の他端部に、回転フレーム30と直交して左右水平方向となるように尾輪軸33(図2及び図3参照)の左右中央部が溶接等により固設される。尾輪軸33は円柱形状の部材であり、その両側に尾輪31・31が回転自在に支持される。
【0026】
回転フレーム30の中途部30b、すなわち一端部と他端部との間の部分は、概ね上下方向に延びている。回転フレーム30の中途部30bの中間部(中央部)には、円柱形状の支持軸34が、中途部30bに対して直交する方向に設けられる。支持軸34は、歩行型管理機1の機体10の前後方向に延びた状態となるように設けられ、その後端が回転フレーム30(の中途部30bの中間部)と連続している。
支持軸34は、取付部22の筒部22c(支持部20の後端)に回転可能に嵌装された後、後に詳述する係止部材40により、当該筒部22c(支持部20)に対して係止される。
【0027】
なお、支持軸34の中途部には、係止部材40を取り付けるための(より詳細には、平頭ピン41の胴体部41bを貫装するための)貫装孔34aが形成される。貫装孔34aは、支持軸34を貫通するように設けられる。
さらに、支持軸34の前部には、止め輪45を取り付けるためのリング状の止め輪溝34bが形成される。支持軸34を取付部22の筒部22c(支持部20の後端)に挿入した状態で、支持軸34の止め輪溝34bに止め輪45を取り付けることにより、支持軸34が筒部22cから脱落不能とされている。なお、本実施形態の止め輪45は市販のC型リングであるが、これに代えて、E型リング等の他の構成の止め輪を適用してもよい。
【0028】
本実施形態においては、回転フレーム30の中途部30b(中央部)に、円柱形状の部材を、溶接等の方法を用いて固定することにより、支持軸34が構成されている。ただし、支持軸が回転フレームと一体成形されている構成とすることもできる。
【0029】
図1〜図3を参照して、畝立て器50について詳細に説明する。
畝立て器50は、耕耘後の圃場に畝を形成するためのものであり、図1に示すように作業軸13と尾輪31・31との間に配置される。畝立て器50は、畝成形板51及びゴムカバー52を備える。
【0030】
畝成形板51は、前記耕耘爪により掘り起こされた圃場に沿って通過させることにより、耕耘後の圃場に溝(畝溝)を形成するものである。本実施形態の畝成形板51は、概ねハート型の板状の部材で構成される。畝成形板51は、取付ステー53a及び補強ステー53bを介して尾輪軸33に固定される。
取付ステー53aは板状の部材であり、前端が畝成形板51の下端部に溶接等で固設され、後端が尾輪軸33の左右中央に固定される。補強ステー53bは板状の部材であり、一端となる前上部が畝成形板51の上部後面の左右略中央に固設され、他端となる後下部が取付ステー53aの前後中途部の上面に固設される。こうして畝成形板51は、取付ステー53a及び補強ステー53bを介して、作業軸13の後方であり、かつ尾輪31・31の前方である位置に、取り付けられる。
【0031】
畝成形板51は、その板面が前下方に傾いた状態に配置され、支持軸34側に近づくほど左右幅が広くなり、尾輪31・31側に近づくほど左右幅が狭くなるように配置される。畝成形板51は、ゴムカバー52を介して、耕耘後の圃場に押し当てられる。
【0032】
ゴムカバー52は、本発明に係る「弾性体」の実施の一形態であり、ゴムにより形成される略八角形の平板状の部材である。ゴムカバー52の後面の左右中央部は、畝成形板51の前面にボルト等を用いて固定される。ゴムカバー52の左側、右側、及び上側は、畝成形板51の外郭から大きくはみ出している。本実施形態のゴムカバー52は、前記耕耘爪により耕された圃場の土を、該畝成形板51の左右両側に案内する役割を果たす。
【0033】
このような構成の畝成形板51及びゴムカバー52を耕耘後の圃場に作用させることにより、前記耕耘爪により耕された圃場に、畝成形板51の下部と略同じ形状の溝(畝溝)を形成するとともに当該溝の左右両側に土を盛って、畝を形成することができる。また、ゴムカバー52の下側左右両端部52a・52bが畝の側面になでつけられることにより、畝を崩れ難くすることができる。
【0034】
上記の如く構成される回転フレーム30、尾輪31、及び畝立て器50等を合わせたものが、一つのアッセンブリーとして、支持部20に取り付けられる。すなわち、尾輪31及び畝立て器50等を取り付けた回転フレーム30の支持軸34が、取付部22の筒部22cに嵌装される。また、係止部材40が具備されることにより、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能に係止することができる。ここで、回転フレーム30の位置は、「抵抗棒作用位置」(図4参照)と「畝立て・尾輪作用位置」(図1参照)とのいずれかの位置に選択的に固定される。
【0035】
図4に示す「抵抗棒作用位置」は、抵抗棒30aが支持軸34の下方に配置される位置であり、抵抗棒30aの下端部を地面(圃場)に接触させることが可能な位置である。
作業軸13を回転駆動して圃場を耕耘するとき、回転フレーム30の位置を「抵抗棒作用位置」にして、抵抗棒30aを地面に押し込む。このようにして、抵抗棒30aの地面に対する抵抗により耕耘作業時の機体10の走行速度を調節するとともに、抵抗棒30aを地中へ挿入する深さを調節することにより耕耘深さを調節することができる。
【0036】
図1に示す「畝立て・尾輪作用位置」は、尾輪31・31及び畝立て器50が支持軸34の下方に配置される位置であり、尾輪31・31及び畝立て器50を地面(圃場)に接触させることが可能な位置である。図1の状態において、尾輪31・31の下端と、畝立て器50の下端と、は略同じ高さとなる。
【0037】
歩行型管理機1を作業場所に移動させたり、作業終了後に別の場所に移動させたりするときに、回転フレーム30の位置を「畝立て・尾輪作用位置」にして、尾輪31・31を地面に接触させる。
すなわち、図5に示すように、作業者がハンドル80の後端のグリップ81を押し下げて尾輪31・31の下端を支点として歩行型管理機1全体を回転させると、尾輪31・31の下端及び畝立て器50の下端は略同じ高さとなるように取り付けられるため、作業軸13の前記耕耘爪及び畝立て器50を地面より上方に持ち上げることができる。この状態において、歩行型管理機1の機体10を前方または後方に押すと、尾輪31・31が地面上において回転(転動)し、機体10を小さな力でもって容易に移動させることができる。すなわち、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、畝立て器50の下端を尾輪31・31の下端よりも上方に持ち上げることができ(図5参照)、畝成形板51及びゴムカバー52が地面に接触しない状態にして歩行型管理機1を移動させることができる。
【0038】
また、作業軸13を回転駆動して圃場を耕耘すると同時に、畝立て器50を利用して圃場に畝を形成したいとき、換言すれば、耕耘作業とともに畝立て作業を行いたいとき、回転フレーム30の位置を「畝立て・尾輪作用位置」にして、尾輪31・31及び畝立て器50を地面側へ押し下げる(図1参照)。この状態において、歩行型管理機1の機体10を前進させると、尾輪31・31の下端及び畝立て器50の下端は略同じ高さとなるように取り付けられるため、耕耘された柔らかい土の中に、尾輪31・31及び畝立て器50が同時に入り込み、畝立て器50により耕耘後の圃場に畝を形成することができる。
【0039】
図2及び図3を参照して、係止部材40の構成について詳細に説明する。
本実施形態の係止部材40は、平頭ピン41及びRピン42を備える。
【0040】
図2に示す平頭ピン41は、頭部41aと胴体部41bとにより一体的に形成される部材である。頭部41aは、短い円柱形状の部分である。頭部41aの中央部からは、胴体部41bが突出される。胴体部41bの軸心は、頭部41aの軸心と同一軸心となるように設けられ、胴体部41bの径方向の寸法は、頭部41aの径方向の寸法よりも小さくなるように設けられる。胴体部41bの先端部(頭部41aとは反対側の端部)には、Rピン42を取り付けるためのピン孔41cが形成される。
【0041】
図3に示すRピン42は、線材を概ねR字形状に折り曲げて形成された部材であり、平頭ピン41の胴体部41bの外周面に沿う形状の湾曲部を有する。
【0042】
図1〜図4を参照して、回転フレーム30の位置を固定する方法、及び位置の変更方法について説明する。
【0043】
回転フレーム30の位置を「抵抗棒作用位置」(図4参照)に固定する場合、以下のように操作する。
すなわち、支持軸34を取付部22の筒部22cに嵌装した状態で、抵抗棒30aが下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から平頭ピン41の胴体部41bを貫装する。そして、筒部22cから右側方に突出された胴体部41bの先端部に、Rピン42を取り付ける。より具体的には、胴体部41bの先端部のピン孔41cにRピン42の一端部が挿入されるとともに、胴体部41bがRピン42の前記湾曲部に挟み込まれる。
当該Rピン42が取り付けられることにより、平頭ピン41が取付部22の筒部22cから脱落不能とされ、ひいては支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0044】
回転フレーム30の位置を「抵抗棒作用位置」(図4参照)から「畝立て・尾輪作用位置」(図1参照)に変更するとともに、「畝立て・尾輪作用位置」に固定する場合、以下のように操作する。
すなわち、Rピン42を平頭ピン41のピン孔41cから抜いた後、平頭ピン41の胴体部41bを筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、から抜く。そして、回転フレーム30を支持軸34を支点として上下に反転させて、尾輪31及び畝立て器50が下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から平頭ピン41の胴体部41bを貫装する。そして、筒部22cから右側方に突出された胴体部41bの先端部に、Rピン42を取り付ける。こうして、支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0045】
なお、回転フレーム30の位置を「畝立て・尾輪作用位置」(図1参照)から「抵抗棒作用位置」(図4参照)に変更する場合に関しても、上記と同様に、平頭ピン41及びRピン42を着脱するとともに、回転フレーム30を上下に反転させることにより、操作を行うことができる。
【0046】
以上の如く、本実施形態に係る歩行型管理機1は、機体10の後部に取り付けられるとともに、後端に機体10の前後方向に延びた筒部22cを有する支持部20(取付部22)と、一端に抵抗棒30aが形成され、他端に尾輪31・31が支持され、中間部に支持軸34が設けられて、支持軸34が支持部20の筒部22cに回転可能に嵌装される回転フレーム30と、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能とする係止部材40と、を具備する歩行型管理機において、回転フレーム30の尾輪31・31側の端部に、畝立て器50を取り付けたものである。
したがって、抵抗棒30a、尾輪31・31、及び畝立て器50を機体10に常時装着した状態にすることができるので、従来の培土器等のような畝立て器の着脱作業が不要となり、作業効率が向上される。
また、係止部材40を操作するとともに、回転フレーム30を適宜の位置まで回転させることにより、抵抗棒30aと尾輪31・31と畝立て器50の使い分けを、簡易に、しかも迅速にできる。
【0047】
また、本実施形態に係る歩行型管理機1に具備される畝立て器50は、回転フレーム30の尾輪31・31側の端部に固定されるとともに、尾輪31・31の前方に配置される畝成形板51と、畝成形板51の板面に、畝成形板51の外郭からはみ出すように取り付けられたゴムカバー52と、を備えるものである。
したがって、畝成形板51及びゴムカバー52を耕耘後の圃場に作用させることにより、圃場に畝成形板51の下部と略同じ形状の溝を形成するとともに、ゴムカバー52により当該溝の左右両側に土を案内し、畝を形成することができる。また、圃場の土が機体10の後上方に飛散することを防止するためのゴムカバー52を、畝立て器50の一部として用いることができるので、少ない部品点数で畝立て器50を構成することができる。
【0048】
また、本実施形態に係る歩行型管理機1に備えられる畝成形板51の左右幅は、支持軸34側に近づくほど広く、尾輪31・31側に近づくほど狭い、ものである。
したがって、畝成形板51を耕耘後の圃場に沿って通過させることにより、耕耘後の圃場に、下方に向かうに従って幅が狭くなる溝(畝溝)を形成することができる。また、従来の培土器のような畝立て器と比べて、極めて部品点数の少ない簡単な構成から成る畝立て器50で畝立て作業を行うことができ、歩行型管理機1全体の重量も大きくならず、また、製造コストの削減にも寄与し得る。
【0049】
また、本実施形態に係る歩行型管理機1に具備される係止部材40は、抵抗棒30aが支持軸34の下方に配置される「抵抗棒作用位置」と、回転フレーム30を支持軸34回りに「抵抗棒作用位置」から反転させた位置であって、尾輪31・31及び畝立て器50が支持軸34の下方に配置される「畝立て・尾輪作用位置」と、のいずれかの位置に、回転フレーム30の位置を係止することができるものである。
したがって、抵抗棒30aが地面に接触可能な「抵抗棒作用位置」と、尾輪31・31及び畝立て器50が地面に接触可能な「畝立て・尾輪作用位置」と、のいずれかの位置に、回転フレーム30の位置を選択的に係止することができるので、抵抗棒30aと、尾輪31・31及び畝立て器50と、の使い分けを簡易に、しかも迅速にできる。
【0050】
さらに、本実施形態に係る歩行型管理機1は、機体10の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸13と、機体10の後部から後上方に向かって延出されたハンドル80と、をさらに具備し、尾輪31・31及び畝立て器50が支持軸34の下方に配置される「畝立て・尾輪作用位置」において、畝立て器50の下端は、尾輪31・31の下端と略同じ高さに取り付けられ、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、前記耕耘爪及び畝立て器50が地面に接触しない状態にすることができるものである。
したがって、回転フレーム30を「畝立て・尾輪作用位置」にした場合において、尾輪31・31を支点としてハンドル80の後端を押し下げたとき、前記耕耘爪及び畝立て器50の下端を尾輪31・31の下端よりも上方に持ち上げることができる。よって、前記耕耘爪及び畝立て器50が地面にすらない状態にして、尾輪31・31を用いて歩行型管理機1を移動させることができる。すなわち、畝立て器50と尾輪31・31との使い分けを簡易に、しかも迅速にできる。
【0051】
以上に本発明の好適な実施形態を示したが、上記の実施形態に代えて以下の構成とすることも可能である。
【0052】
<第二実施形態>
上記の実施形態の係止部材40に代えて、図6に示す係止部材60を備える構成としてもよい。
図6(a)に示す係止部材60は、いわゆるリンチピンであり、頭部60aと胴体部60bと湾曲バネ部60wとにより一体的に形成される部材である。頭部60aは、略直方体形状の部分である。頭部60aの中央部からは、胴体部60bが突出される。胴体部60bの軸心は、頭部60aの軸心と同一軸心となるように設けられ、胴体部60bの径方向の寸法は、頭部60aの径方向の寸法よりも小さくなるように設けられる。頭部60aからは湾曲バネ部60wが、胴体部60bの先端部側に向かって延出される。湾曲バネ部60wの先端部60eは、ループ状に形成されていて、当該ループ状の部分(先端部60e)を胴体部60bの先端部に引っ掛けることが可能である。
【0053】
係止部材60を用いて回転フレーム30の位置を「抵抗棒作用位置」または「畝立て・尾輪作用位置」に固定する場合、以下のように操作する。
すなわち、支持軸34を取付部22の筒部22c(の貫装孔22d)に嵌装した状態で、抵抗棒30aが上方または下方に配置される状態とする。この状態において、筒部22cの貫装孔22dの位置と、支持軸34の貫装孔34aの位置と、を側面視において一致させて、これらの貫装孔22d・34aに左側方から係止部材60の胴体部60bを貫装する。そして、図6(b)に示すように、筒部22cから右側方に突出された胴体部60bの先端部に、係止部材60の湾曲バネ部60wの先端部60eを引っ掛ける。当該係止部材60が取り付けられることにより、係止部材60が取付部22の筒部22cから脱落不能とされ、ひいては支持軸34が取付部22(支持部20)に対して相対回転不能かつ前後移動不能とされる。
【0054】
このような構成の係止部材40を本発明に係る「係止部材」として採用した場合、市販のリンチピン等を用いて係止部材40を構成することができ、また、係止部材40の着脱が容易であり作業効率が向上される。
【0055】
<第三実施形態>
上記の実施形態の係止部材40または係止部材60に代えて、図7に示す係止部材70を備える構成としてもよい。
図7に示す係止部材70は、保持部材71、ロックピン72、及び圧縮バネ73を備える。
なお、第一実施形態及び第二実施形態においては、取付部22の筒部22cの中途部に、係止部材40(より詳細には平頭ピン41の胴体部41b)を貫装するための貫装孔22dが、筒部22cを左右に貫通するように設けられていた。この点、本実施形態においては、当該筒部22cの右側に貫装孔22dが形成されているだけで、当該筒部22cの左側には貫装孔が形成されていない(筒部22cを貫通していない)。このような点で、本実施形態の取付部22(支持部20)の構成は、第一実施形態及び第二実施形態の構成とは若干異なっている。
【0056】
保持部材71は、ロックピン72及び圧縮バネ73を取付部22(支持部20)の筒部22cの右側方に保持するための部材である。保持部材71は、前板71a、右側板71b、及び後板71cにより構成されていて、平面視において概ねコ字形状を有する。
保持部材71の右側板71bには、ロックピン72の胴体部72bを貫装するための貫装孔71dが形成される。該貫装孔71dは、側面視において、支持軸34の貫装孔34aの位置と一致するように設けられる。
保持部材71の前板71a、右側板71b、及び後板71cにより取り囲まれた空間は、圧縮バネ73を配置するスペースを成している。
【0057】
ロックピン72は、頭部72aと胴体部72bとにより一体的に形成される部材である。頭部72aは、短い円柱形状の部分である。頭部72aの中央部からは、胴体部72bが突出される。胴体部72bの軸心は、頭部72aの軸心と同一軸心となるように設けられ、胴体部72bの径方向の寸法は、頭部72aの径方向の寸法よりも小さくなるように設けられる。胴体部72bの中途部には、圧縮バネ73の一端(左端)を支持するための拡径部72cが形成される。拡径部72cは、胴体部72bの軸心と同一軸心となるように設けられ、拡径部72cの径方向の寸法は、胴体部72bの径方向の寸法よりも大きくなるように設けられる。
【0058】
圧縮バネ73は、ロックピン72の胴体部72bの先端部が、筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、に嵌装された状態に保持されるように、ロックピン72を付勢するものである。圧縮バネ73は、ロックピン72の拡径部72cと、保持部材71の右側板71bと、の間に介在される。
【0059】
圧縮バネ73が胴体部72bに嵌装された状態で、ロックピン72の胴体部72bが、右側板71bの貫装孔71d、筒部22cの貫装孔22d、及び支持軸34の貫装孔34aに挿入される。こうして、ロックピン72は、胴体部72bの先端部が筒部22cの貫装孔22dと、及び支持軸34の貫装孔34aと、に嵌装された状態とされていて、圧縮バネ73からの付勢力により筒部22cから脱落不能とされている。
このような構成の係止部材70を用いて、回転フレーム30の位置を「抵抗棒作用位置」(図4参照)または「畝立て・尾輪作用位置」(図1参照)に固定することができる。
【0060】
回転フレーム30の位置を「抵抗棒作用位置」から「畝立て・尾輪作用位置」に変更する場合、以下のように操作する。
すなわち、歩行型管理機1の作業者は、圧縮バネ73の付勢力に抗してロックピン72の頭部72aを右側方に引っ張ることにより、胴体部72bの先端部を筒部22cの貫装孔22dと、支持軸34の貫装孔34aと、から引き抜く。こうすることより、回転フレーム30(支持軸34)が支持部20(筒部22c)に対して相対回転可能な状態となる。そして、回転フレーム30を支持軸34を支点として上下に反転させて、尾輪31及び畝立て器50が下方に配置される状態とする。この状態において、作業者はロックピン72の頭部72aを引っ張るのを止める。こうすることにより、ロックピン72の胴体部72bの先端部が、圧縮バネ73の付勢力に従って、貫装孔22d・34aに嵌装される。こうして、回転フレーム30の位置が「畝立て・尾輪作用位置」に固定される。
【0061】
なお、回転フレーム30の位置を「畝立て・尾輪作用位置」(図1参照)から「抵抗棒作用位置」(図4参照)に変更する場合に関しても、上記と同様に、ロックピン72の頭部72aを右側方に引っ張るとともに、回転フレーム30を上下に反転させることにより、操作を行うことができる。
【0062】
このような構成の係止部材70を本発明に係る「係止部材」として採用した場合、係止部材70による支持軸34(回転フレーム30)と筒部22c(支持部20)との係止を解除する操作が容易であり、作業効率が向上される。また、回転フレーム30を反転させるときに係止部材70を歩行型管理機1(厳密には保持部材71)から取り外す必要がないので、ロックピン72を紛失してしまう虞がない。
【符号の説明】
【0063】
1 歩行型管理機
10 機体
20 支持部
22c 筒部
30 回転フレーム
30a 抵抗棒
31 尾輪
34 支持軸
40 係止部材
50 畝立て器
51 畝成形板
52 ゴムカバー(弾性体)
80 ハンドル
【特許請求の範囲】
【請求項1】
機体の後部に取り付けられるとともに、後端に該機体の前後方向に延びた筒部を有する支持部と、
一端に抵抗棒が形成され、他端に尾輪が支持され、中間部に支持軸が設けられて、該支持軸が前記支持部の筒部に回転可能に嵌装される回転フレームと、
該回転フレームを前記支持部に対して相対回転不能かつ前後移動不能とする係止部材と、を具備する歩行型管理機において、
前記回転フレームの尾輪側の端部に、畝立て器を取り付けたことを特徴とする歩行型管理機。
【請求項2】
請求項1に記載の歩行型管理機であって、
前記畝立て器は、
前記回転フレームの尾輪側の端部に固定されるとともに、前記尾輪の前方に配置される畝成形板と、
該畝成形板の板面に、該畝成形板の外郭からはみ出すように取り付けられた弾性体と、を備える歩行型管理機。
【請求項3】
請求項1または請求項2に記載の歩行型管理機であって、
前記機体の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸と、
前記機体の後部から後上方に向かって延出されたハンドルと、をさらに具備し、
前記尾輪及び前記畝立て器が前記支持軸の下方に配置される「畝立て・尾輪作用位置」において、前記畝立て器の下端は、前記尾輪の下端と略同じ高さに取り付けられ、
前記尾輪を支点として前記ハンドルの後端を押し下げたとき、前記耕耘爪及び前記畝立て器が地面に接触しない状態にすることができる歩行型管理機。
【請求項1】
機体の後部に取り付けられるとともに、後端に該機体の前後方向に延びた筒部を有する支持部と、
一端に抵抗棒が形成され、他端に尾輪が支持され、中間部に支持軸が設けられて、該支持軸が前記支持部の筒部に回転可能に嵌装される回転フレームと、
該回転フレームを前記支持部に対して相対回転不能かつ前後移動不能とする係止部材と、を具備する歩行型管理機において、
前記回転フレームの尾輪側の端部に、畝立て器を取り付けたことを特徴とする歩行型管理機。
【請求項2】
請求項1に記載の歩行型管理機であって、
前記畝立て器は、
前記回転フレームの尾輪側の端部に固定されるとともに、前記尾輪の前方に配置される畝成形板と、
該畝成形板の板面に、該畝成形板の外郭からはみ出すように取り付けられた弾性体と、を備える歩行型管理機。
【請求項3】
請求項1または請求項2に記載の歩行型管理機であって、
前記機体の前部に回転可能に支持されるとともに、外周に複数の耕耘爪が取り付けられる作業軸と、
前記機体の後部から後上方に向かって延出されたハンドルと、をさらに具備し、
前記尾輪及び前記畝立て器が前記支持軸の下方に配置される「畝立て・尾輪作用位置」において、前記畝立て器の下端は、前記尾輪の下端と略同じ高さに取り付けられ、
前記尾輪を支点として前記ハンドルの後端を押し下げたとき、前記耕耘爪及び前記畝立て器が地面に接触しない状態にすることができる歩行型管理機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−90536(P2012−90536A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−238714(P2010−238714)
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]