
歩行型耕耘機
【課題】
本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【解決手段】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【解決手段】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行型の耕耘機に関する。
【背景技術】
【0002】
特許文献1には、左右一対の移動輪の支持体それぞれに左右一対の培土板を取りつけ、培土作業位置と培土非作業位置に切り換える技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−183235号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1においては、培土作業位置と培土非作業位置とするのに、左右一対の培土板それぞれ切り換え作業を要するため煩わしい。本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【課題を解決するための手段】
【0005】
この発明は、かかる技術的課題を解決するために次のような技術的手段を講ずる。すなわち、請求項1記載の発明は、機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
【0006】
請求項2記載の発明は、耕耘作業時には、培土板(B)及び転輪(17)を一体に上方に回動し、非作用姿勢とすることを特徴とする請求項1記載の歩行型耕耘機とする。
【発明の効果】
【0007】
請求項1記載の発明によると、運搬作業時では、転輪17が圃場面に接地すると共に耕耘部K及び培土板Bの下端部が圃場面から離間して非作用状態とすることで、運搬作業時の機体を適切に支持し、かつ、培土板Bが運搬の邪魔になることを防止できる。
【0008】
請求項2記載の発明によると、耕耘作業時に不要な転輪17と培土板Bとを一体となって上方に回動することで、圃場面に作用しない姿勢となるため、操作が簡単である。
【図面の簡単な説明】
【0009】
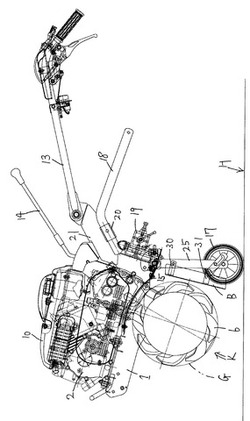
【図1】側面から見た培土作業時の歩行型耕耘機を示す図
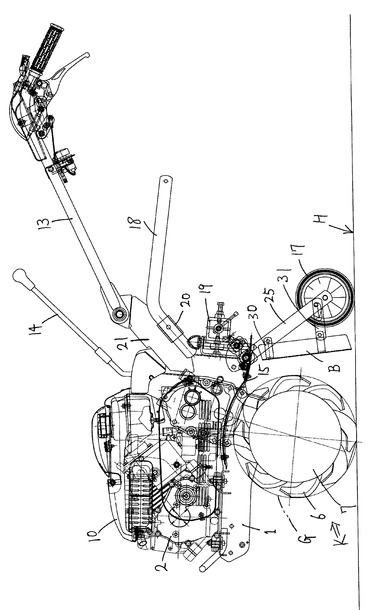
【図2】側面から見た運搬作業時の歩行型耕耘機を示す図
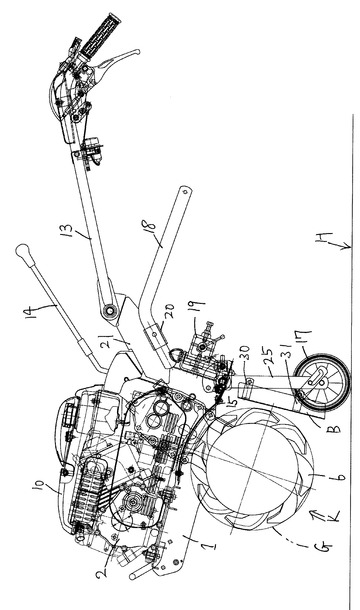
【図3】側面から見た耕耘作業時の歩行型耕耘機を示す図
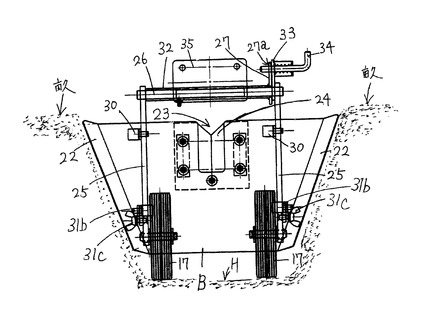
【図4】背面から見た培土板及び車輪を示す図
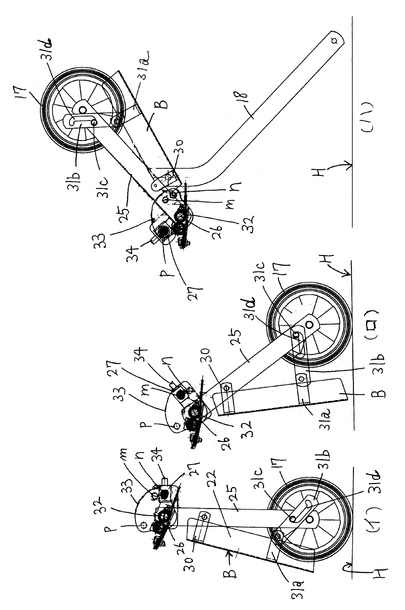
【図5】(イ)側面から見た培土作業時の培土板と転輪の姿勢を示す図 (ロ)側面から見た運搬作業時の培土板と転輪の姿勢を示す図 (ハ)側面から見た耕耘作業時の培土板と転輪の姿勢を示す図
【図6】側面から見た歩行型耕耘機の概要図
【発明を実施するための形態】
【0010】
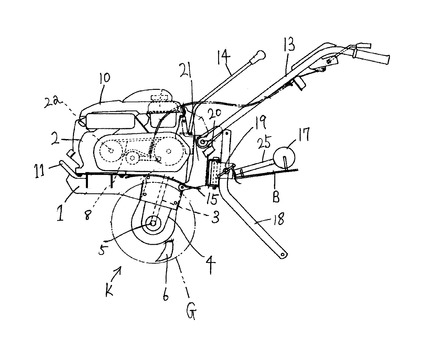
本発明の歩行型耕耘機の基本構成について図6に基づいて説明する。なお、本実施の形態における前後とは機体の進行方向を指し、左右とは形成する畝側を指す。
この歩行型耕耘機は駆動源であるエンジン又は電動モータからの動力で耕耘部の耕耘爪を回転駆動させて耕耘作業を行い、歩行型耕耘機を運搬するときには遊転する車輪を接地させると共に耕耘部を地面から離間して車輪で移動するいわゆる車軸管理機である。
【0011】
機体前後方向に延びる前機体フレーム1の前側上部にエンジン2を搭載し、後側に伝動軸3を内装する伝動ケース4を支持する。伝動ケース4は機体の左右方向中央部に上下方向に亘って配置し、伝動ケース4の下部から左右両側に耕耘軸5をそれぞれ延設する。そして、エンジン2の駆動軸2aの動力が伝動ベルト8を経て伝動軸3に伝動し、次いで伝動軸3から耕耘軸5に伝動することにより、耕耘軸5に取り付けている多数の耕耘爪6が回転し耕耘作業を行なう構成である。耕耘軸5の左右両端にはサイドディスク7を設けている。
【0012】
エンジン2の上部には燃料タンク10を設け、前機体フレーム1の前端部には上向きに取り付けられるバンパー11を設けている。燃料タンク10の後方には操作ハンドル13と、後機体フレーム21に取り付けた変速レバー14を備えている。
【0013】
耕耘爪6の上側を耕耘カバー15で覆って耕耘部Kを構成し、耕耘部Kの後部には畝を形成する培土板Bと、遊転する左右一対の車輪17を設けている。培土板Bの上方には「く」の字状の抵抗棒18を縦姿勢に保持する縦ホルダー19と、抵抗棒18を横姿勢に保持する横ホルダー20を設け、それぞれ後機体フレーム21に取り付ける構成である。
【0014】
次に車輪17と培土板Bの構成について図4と図5に基づいて説明する。
培土板Bは背面視で逆台形状に形成する平面の鉄板で、左右両端に後方に向かって屈曲する屈曲部22を形成している。また、上部の左右中央には切欠き部23を形成し、該切欠き部23には中割れするゴム板24を取りつける構成としている。
【0015】
左右一対の車輪17はそれぞれ培土板Bの下部の左右両端部の後方に対向する位置に設け、それぞれ支持体25で支持される構成である。左右の支持体25は横軸芯の回動軸26で連結し、回動軸26が回動すると左右の支持体25及び車輪17が共に前後方向に回動する構成である。
【0016】
培土板Bは支持体25に連結して左右の車輪17及び支持体25と共に回動する構成で、支持体25の上部と培土板Bの上部とを連結する上部連結板30と、支持体25の下部と培土板Bの下部とを連結する下部連結板31とで連結する構成である。上部連結板30は一端を培土板Bに固着し、他端を支持体25にピンで固定し、支持体25に対して横軸芯に回動自在に構成している。
【0017】
下部連結板31は培土板B側に固着する固定部31aと、支持体25側に連結する調節部31bとで構成し、固定部31aと調節部31bとはリンク動作可能に連結すると共に、調節部31bには長孔31dを形成して培土板Bの下部と車輪17との前後方向の距離を変更する構成である。
【0018】
支持体25の回動軸26の外周を回動軸26を支持する中空状の回動支持軸32で覆い、回動支持軸32の外周には後機体フレーム21側に固定する固定具35と、位置合わせ孔27aを形成した位置合わせプレート27を取り付けている。また、回動軸26側には側面視扇形で複数個所の位置決め孔m、n、pを形成した位置決めプレート33を取り付けている。そして、位置決めピン34で位置決め孔m、n、pのいずれかと位置合わせ孔27aを合わせて挿入し、支持体25、すなわち車輪17と培土板Bの位置を培土作業位置、運搬作業位置、耕耘作業位置に変更する構成である。
【0019】
次に耕耘しながら畝を形成する培土作業と、非耕耘時の歩行型耕耘機を移動する運搬作業と、通常の耕耘作業について説明する。
培土作業時(図1及び図5の(ロ)参照)は培土板Bと車輪17との距離が広くなる位置に調節部31bを調節して固定ボルト31cで位置固定する。位置決めピン34を培土作業位置孔mと位置合わせ孔27aに挿入して支持体25を斜め後姿勢として車輪17を接地すると、培土板Bが支持体25より急傾斜の斜め後姿勢となり下端部が培土作用時に圃場Hに作用する姿勢となる。そして、作業者が操作ハンドル13を把持して耕耘部Kの回転による推進力で圃場を耕耘し、耕耘した土を培土板Bの前面で受けて左右両側に押し出し、屈曲部22の面で案内及び押圧することで左右に畝の傾斜面を形成する。このとき、車輪17は耕耘深さを一定になるように調節する役割を果たしている。また、培土作業時には抵抗棒18は不要なので横ホルダ20に前後方向長手姿勢に収納し、運転操作および培土作業いずれにも邪魔しないようにしている。
【0020】
運搬作業時(図2及び図5の(イ)参照)には、培土板Bと車輪17との距離が狭くなる位置に調節部31bを調節して固定ボルト31cで位置固定する。位置決めピン33を運搬作業位置孔nと位置合わせ孔27aに挿入して、支持体25を地面に対して急傾斜又は略垂直の姿勢にして車輪を接地すると、培土板Bが斜め前姿勢となって圃場から非作用位置まで上方に離間する。また、運転者が操作ハンドル13を押し下げると、耕耘部Kも地面から離間し、機体前側が斜め上向きになり、機体が運搬姿勢となる。このとき、培土板Bは耕耘爪6の耕耘回転軌跡G内に入らない構成としている。
【0021】
通常の耕耘作業時(図3及び図5の(ハ)参照)は車輪17と培土板Bは不要のため上方に回動して位置決めピン33を耕耘作業位置孔pと位置合わせ孔27aに挿入して支持体25を後斜め上姿勢にする。そして、抵抗棒18を縦ホルダー19で縦方向長手姿勢に保持し、下端部を圃場面Hに作用させる。このとき、抵抗棒18は培土板Bの切欠き部23のゴム板24の中割れ部を貫通する構成である。
【0022】
そして、作業者が操作ハンドル13を把持して耕耘部Kの回転の推進力で耕耘作業がなされる。
【符号の説明】
【0023】
13 操作ハンドル
17 転輪
K 耕耘部
B 培土板
【技術分野】
【0001】
本発明は、歩行型の耕耘機に関する。
【背景技術】
【0002】
特許文献1には、左右一対の移動輪の支持体それぞれに左右一対の培土板を取りつけ、培土作業位置と培土非作業位置に切り換える技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−183235号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1においては、培土作業位置と培土非作業位置とするのに、左右一対の培土板それぞれ切り換え作業を要するため煩わしい。本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【課題を解決するための手段】
【0005】
この発明は、かかる技術的課題を解決するために次のような技術的手段を講ずる。すなわち、請求項1記載の発明は、機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
【0006】
請求項2記載の発明は、耕耘作業時には、培土板(B)及び転輪(17)を一体に上方に回動し、非作用姿勢とすることを特徴とする請求項1記載の歩行型耕耘機とする。
【発明の効果】
【0007】
請求項1記載の発明によると、運搬作業時では、転輪17が圃場面に接地すると共に耕耘部K及び培土板Bの下端部が圃場面から離間して非作用状態とすることで、運搬作業時の機体を適切に支持し、かつ、培土板Bが運搬の邪魔になることを防止できる。
【0008】
請求項2記載の発明によると、耕耘作業時に不要な転輪17と培土板Bとを一体となって上方に回動することで、圃場面に作用しない姿勢となるため、操作が簡単である。
【図面の簡単な説明】
【0009】
【図1】側面から見た培土作業時の歩行型耕耘機を示す図
【図2】側面から見た運搬作業時の歩行型耕耘機を示す図
【図3】側面から見た耕耘作業時の歩行型耕耘機を示す図
【図4】背面から見た培土板及び車輪を示す図
【図5】(イ)側面から見た培土作業時の培土板と転輪の姿勢を示す図 (ロ)側面から見た運搬作業時の培土板と転輪の姿勢を示す図 (ハ)側面から見た耕耘作業時の培土板と転輪の姿勢を示す図
【図6】側面から見た歩行型耕耘機の概要図
【発明を実施するための形態】
【0010】
本発明の歩行型耕耘機の基本構成について図6に基づいて説明する。なお、本実施の形態における前後とは機体の進行方向を指し、左右とは形成する畝側を指す。
この歩行型耕耘機は駆動源であるエンジン又は電動モータからの動力で耕耘部の耕耘爪を回転駆動させて耕耘作業を行い、歩行型耕耘機を運搬するときには遊転する車輪を接地させると共に耕耘部を地面から離間して車輪で移動するいわゆる車軸管理機である。
【0011】
機体前後方向に延びる前機体フレーム1の前側上部にエンジン2を搭載し、後側に伝動軸3を内装する伝動ケース4を支持する。伝動ケース4は機体の左右方向中央部に上下方向に亘って配置し、伝動ケース4の下部から左右両側に耕耘軸5をそれぞれ延設する。そして、エンジン2の駆動軸2aの動力が伝動ベルト8を経て伝動軸3に伝動し、次いで伝動軸3から耕耘軸5に伝動することにより、耕耘軸5に取り付けている多数の耕耘爪6が回転し耕耘作業を行なう構成である。耕耘軸5の左右両端にはサイドディスク7を設けている。
【0012】
エンジン2の上部には燃料タンク10を設け、前機体フレーム1の前端部には上向きに取り付けられるバンパー11を設けている。燃料タンク10の後方には操作ハンドル13と、後機体フレーム21に取り付けた変速レバー14を備えている。
【0013】
耕耘爪6の上側を耕耘カバー15で覆って耕耘部Kを構成し、耕耘部Kの後部には畝を形成する培土板Bと、遊転する左右一対の車輪17を設けている。培土板Bの上方には「く」の字状の抵抗棒18を縦姿勢に保持する縦ホルダー19と、抵抗棒18を横姿勢に保持する横ホルダー20を設け、それぞれ後機体フレーム21に取り付ける構成である。
【0014】
次に車輪17と培土板Bの構成について図4と図5に基づいて説明する。
培土板Bは背面視で逆台形状に形成する平面の鉄板で、左右両端に後方に向かって屈曲する屈曲部22を形成している。また、上部の左右中央には切欠き部23を形成し、該切欠き部23には中割れするゴム板24を取りつける構成としている。
【0015】
左右一対の車輪17はそれぞれ培土板Bの下部の左右両端部の後方に対向する位置に設け、それぞれ支持体25で支持される構成である。左右の支持体25は横軸芯の回動軸26で連結し、回動軸26が回動すると左右の支持体25及び車輪17が共に前後方向に回動する構成である。
【0016】
培土板Bは支持体25に連結して左右の車輪17及び支持体25と共に回動する構成で、支持体25の上部と培土板Bの上部とを連結する上部連結板30と、支持体25の下部と培土板Bの下部とを連結する下部連結板31とで連結する構成である。上部連結板30は一端を培土板Bに固着し、他端を支持体25にピンで固定し、支持体25に対して横軸芯に回動自在に構成している。
【0017】
下部連結板31は培土板B側に固着する固定部31aと、支持体25側に連結する調節部31bとで構成し、固定部31aと調節部31bとはリンク動作可能に連結すると共に、調節部31bには長孔31dを形成して培土板Bの下部と車輪17との前後方向の距離を変更する構成である。
【0018】
支持体25の回動軸26の外周を回動軸26を支持する中空状の回動支持軸32で覆い、回動支持軸32の外周には後機体フレーム21側に固定する固定具35と、位置合わせ孔27aを形成した位置合わせプレート27を取り付けている。また、回動軸26側には側面視扇形で複数個所の位置決め孔m、n、pを形成した位置決めプレート33を取り付けている。そして、位置決めピン34で位置決め孔m、n、pのいずれかと位置合わせ孔27aを合わせて挿入し、支持体25、すなわち車輪17と培土板Bの位置を培土作業位置、運搬作業位置、耕耘作業位置に変更する構成である。
【0019】
次に耕耘しながら畝を形成する培土作業と、非耕耘時の歩行型耕耘機を移動する運搬作業と、通常の耕耘作業について説明する。
培土作業時(図1及び図5の(ロ)参照)は培土板Bと車輪17との距離が広くなる位置に調節部31bを調節して固定ボルト31cで位置固定する。位置決めピン34を培土作業位置孔mと位置合わせ孔27aに挿入して支持体25を斜め後姿勢として車輪17を接地すると、培土板Bが支持体25より急傾斜の斜め後姿勢となり下端部が培土作用時に圃場Hに作用する姿勢となる。そして、作業者が操作ハンドル13を把持して耕耘部Kの回転による推進力で圃場を耕耘し、耕耘した土を培土板Bの前面で受けて左右両側に押し出し、屈曲部22の面で案内及び押圧することで左右に畝の傾斜面を形成する。このとき、車輪17は耕耘深さを一定になるように調節する役割を果たしている。また、培土作業時には抵抗棒18は不要なので横ホルダ20に前後方向長手姿勢に収納し、運転操作および培土作業いずれにも邪魔しないようにしている。
【0020】
運搬作業時(図2及び図5の(イ)参照)には、培土板Bと車輪17との距離が狭くなる位置に調節部31bを調節して固定ボルト31cで位置固定する。位置決めピン33を運搬作業位置孔nと位置合わせ孔27aに挿入して、支持体25を地面に対して急傾斜又は略垂直の姿勢にして車輪を接地すると、培土板Bが斜め前姿勢となって圃場から非作用位置まで上方に離間する。また、運転者が操作ハンドル13を押し下げると、耕耘部Kも地面から離間し、機体前側が斜め上向きになり、機体が運搬姿勢となる。このとき、培土板Bは耕耘爪6の耕耘回転軌跡G内に入らない構成としている。
【0021】
通常の耕耘作業時(図3及び図5の(ハ)参照)は車輪17と培土板Bは不要のため上方に回動して位置決めピン33を耕耘作業位置孔pと位置合わせ孔27aに挿入して支持体25を後斜め上姿勢にする。そして、抵抗棒18を縦ホルダー19で縦方向長手姿勢に保持し、下端部を圃場面Hに作用させる。このとき、抵抗棒18は培土板Bの切欠き部23のゴム板24の中割れ部を貫通する構成である。
【0022】
そして、作業者が操作ハンドル13を把持して耕耘部Kの回転の推進力で耕耘作業がなされる。
【符号の説明】
【0023】
13 操作ハンドル
17 転輪
K 耕耘部
B 培土板
【特許請求の範囲】
【請求項1】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、
培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、
培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、
畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、
運搬作業時には、運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする歩行型耕耘機。
【請求項2】
耕耘作業時には、培土板(B)及び転輪(17)を一体に上方に回動し、非作用姿勢とすることを特徴とする請求項1記載の歩行型耕耘機。
【請求項1】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、
培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、
培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、
畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、
運搬作業時には、運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする歩行型耕耘機。
【請求項2】
耕耘作業時には、培土板(B)及び転輪(17)を一体に上方に回動し、非作用姿勢とすることを特徴とする請求項1記載の歩行型耕耘機。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−99356(P2013−99356A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−17286(P2013−17286)
【出願日】平成25年1月31日(2013.1.31)
【分割の表示】特願2010−169250(P2010−169250)の分割
【原出願日】平成22年7月28日(2010.7.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年1月31日(2013.1.31)
【分割の表示】特願2010−169250(P2010−169250)の分割
【原出願日】平成22年7月28日(2010.7.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]