
歩行型草刈機
【課題】走行機体を前進させての刈取作業、及び、走行機体を後進させての刈取作業を好適に行うことのできる歩行型草刈機を提供する。
【解決手段】走行機体1に、原動部Eと、原動部Eからの動力により回動する走行装置及び刈刃10とを備え、走行装置が走行機体1に支持された左右の前輪5、及び、左右の後輪6を有し、原動部Eの下部に刈刃10を上下軸心P2周りに回動自在に支持し、走行機体1に原動部E、及び、刈刃10を左右軸心P1周りに揺動可能に支持して、刈刃10の前側が下方に揺動した前下がり傾斜姿勢、及び、刈刃の後側が下方に揺動した後下がり傾斜姿勢に、原動部E、及び、刈刃10を姿勢変更する傾斜姿勢変更機構を備える。
【解決手段】走行機体1に、原動部Eと、原動部Eからの動力により回動する走行装置及び刈刃10とを備え、走行装置が走行機体1に支持された左右の前輪5、及び、左右の後輪6を有し、原動部Eの下部に刈刃10を上下軸心P2周りに回動自在に支持し、走行機体1に原動部E、及び、刈刃10を左右軸心P1周りに揺動可能に支持して、刈刃10の前側が下方に揺動した前下がり傾斜姿勢、及び、刈刃の後側が下方に揺動した後下がり傾斜姿勢に、原動部E、及び、刈刃10を姿勢変更する傾斜姿勢変更機構を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行機体に、原動部と、原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機に関する。
【背景技術】
【0002】
従来の技術としては、例えば特許文献1に開示されているように、走行車輪(特許文献1の図1の4)を備えた走行機体にエンジン(特許文献1の図1の5)を搭載し、このエンジンからの動力により回動する刈刃(特許文献1の図1の2)を備えた歩行型草刈機が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−53991号公報(図1,図2,図13,図14参照)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の歩行型草刈機では、刈刃を構成する基盤(特許文献1の図13の66)や刃片(特許文献1の図13の67)が地面と略水平になるように、駆動ケース(特許文献1の図13の9)の下部に刈刃が装着されて、歩行型草刈機を前進させると、前方から導入された草は刈刃の前部で刈り取られ、歩行型草刈機を後進させると、後方から導入された草が刈刃の後部で刈り取られるように構成されていた。
【0005】
そのため、刈刃のうちの実際に草を刈り取る部分は刈刃の前部又は後部であるにも関わらず、歩行型草刈機を前進させる場合においても、歩行型草刈機を後進させる場合においても、刈刃の下面側が略全域に亘って地面と近い位置に位置することになり、刈刃の下側を通過する刈り取られた後の地面に生えた草が刈刃を回転させる抵抗になり易かった。その結果、刈刃の駆動によるエンジンの負荷が大きくなって、エンジンの小型化及び歩行型草刈機の軽量化を図る観点から改善の余地があった。
本発明は、走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を回転させる動力を節約することができる歩行型草刈機を簡素な構造で実現することを目的とする。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、走行機体に、原動部と、前記原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機において、次のように構成することにある。
前記走行機体に、前記刈刃を上下軸心周りに回動自在に、且つ左右軸心周りに揺動可能に支持すると共に、
前記走行機体を前進させると前記刈刃の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更され、前記走行機体を後進させると前記刈刃の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される傾斜姿勢変更機構を備える。
【0007】
(作用)
本発明の第1特徴によると、走行機体を前進(後進)させることにより、前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更された刈刃の前部(後部)により前方から導入され
た草を刈り取ることができる。この場合、刈刃が前下がり傾斜姿勢(後下がり傾斜姿勢)でも、草を刈り取るのは刈刃の前側(後側)であるので、前方(後方)から導入された草を支障なく刈り取ることができる。前下がり傾斜姿勢(後下がり傾斜姿勢)では、刈刃の後側(前側)が上方に離れているため、刈刃の下側を通過する草が刈刃を回転させる抵抗になり難くなって、刈刃の駆動による原動部の負荷を小さくすることができる。その結果、走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を駆動する原動部の出力を小さく設定することができ、刈刃を回転させる動力を節約できる。
【0008】
本発明の第1特徴によると、刈刃は走行機体に左右軸心周りで揺動可能に支持されているため、走行機体に対して刈刃を揺動させることで、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を容易に現出することができる。その結果、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢の切り換えを容易に行うことができ、傾斜姿勢変更機構の構造を簡素化できる。
【0009】
(発明の効果)
本発明の第1特徴によると、原動部の小型化及び歩行型草刈機の軽量化を図ることができると共に、歩行型草刈機の製造コストを削減できる。
【0010】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の歩行型草刈機において、次のように構成することにある。
前記原動部の下部に前記刈刃を上下軸心周りに回動自在に支持すると共に、
前記走行機体に、前記原動部を左右軸心周りに揺動可能に支持して、前記傾斜姿勢変更機構を構成する。
【0011】
(作用)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第2特徴によると、原動部を走行機体に対して左右軸心周りに揺動させることで、刈刃が原動部と一体で走行機体に対して左右軸心周りに揺動し、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を容易に現出することができる。また、例えば刈刃のみを左右軸心周りに揺動するように構成すると、刈刃と原動部との接続構造が複雑になるおそれがあるが、原動部及び刈刃を一体で左右軸心周りに揺動することで、刈刃と原動部との接続構造が複雑になることを防止できる。その結果、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢の切り換えを更に容易に行うことができ、傾斜姿勢変更機構の構造を更に簡素化できる。
【0012】
(発明の効果)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第2特徴によると、歩行型草刈機の更なる軽量化を図ることができると共に、歩行型草刈機の製造コストを更に削減できる。
【0013】
[III]
(構成)
本発明の第3特徴は、本発明の第2特徴の歩行型草刈機において、次のように構成することにある。
前記原動部の左右両側部から左右向きで同心状の駆動軸及び揺動支軸を延出すると共に、前記駆動軸を介して前記原動部からの動力を前記走行装置に伝達し、
前記駆動軸及び揺動支軸を前記走行機体に左右軸心周りで回動可能に支持して、前記傾斜姿勢変更機構を構成する。
【0014】
(作用)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第3特徴によると、原動部からの動力により駆動軸を回転させて走行機体を前進(後進)させると、力の作用反作用の法則により、駆動軸が回転する方向と逆方向の力が原動部に作用して原動部及び刈刃が一体で揺動し、刈刃の前側(後側)が下方に揺動した前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更される。その結果、走行装置を駆動させることによる慣性力を有効に活用して自動的に刈刃を前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更することができると共に、走行機体の走行方向を変更することで自動的に前下がり傾斜姿勢及び後下がり傾斜姿勢を切り替えることができる。
【0015】
具体的には、例えば図13に示すように、走行機体を前進させて駆動軸(図13の7a)が左右軸心周り(図13のP1)に時計回りで回転すると、力の作用反作用の法則により、駆動軸の左右軸心周りでの反時計回りの力が原動部(図13のE)に作用して原動部及び刈刃(図13の10)が一体で前方に揺動し、刈刃の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更される。また、例えば図14に示すように、走行機体を後進させて駆動軸を左右軸心周りで反時計回りに回転すると、力の作用反作用の法則により、駆動軸の左右軸心周りで時計回りの力が原動部(図14のE)に作用して原動部及び刈刃(図14の10)が一体で後方に揺動し、刈刃(図14の10)の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される。
【0016】
(発明の効果)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第3特徴によると、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を簡易迅速に切り換えることができ、刈取作業の作業性を向上できると共に、傾斜姿勢変更機構の構造を更に簡素化できる。
【0017】
[IV]
(構成)
本発明の第4特徴は、本発明の第1特徴〜第3特徴のうちのいずれか一つに記載の歩行型草刈機において、次のように構成することにある。
前記前下がり傾斜姿勢での刈刃の前下がり傾斜角度又は前記後下がり傾斜姿勢での刈刃の後下がり傾斜角度を変更調節可能な傾斜角度調節機構を備える。
【0018】
(作用)
本発明の第4特徴によると、本発明の第1特徴〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第4特徴によると、傾斜角度調節機構により刈刃の前下がり傾斜角度又は後下がり傾斜角度を変更することで、刈刃の高さを変更することができ、草の長さに応じて傾斜角度調節機構を調節して長く又は短く草を刈り取ることができる。その結果、草の刈高さを変更調節する機構を簡素化することができ、草の刈高さを変更調節する機構の部品点数を削減できる。
【0019】
(発明の効果)
本発明の第4特徴によると、本発明の第1特徴〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第4特徴によると、草の刈高さを変更可能に構成しながら、歩行型草刈機の製造コストを低く抑えることができる。
【図面の簡単な説明】
【0020】
【図1】歩行型草刈機の全体左側面図
【図2】歩行型草刈機の全体平面図
【図3】走行機体の縦断左側面図
【図4】走行機体の横断平面図
【図5】走行機体の縦断背面図
【図6】前輪及び後輪の支持構造を説明する縦断背面図
【図7】可動飛散防止カバーの構造を説明する縦断側面図
【図8】刈刃の構造を説明する横断平面図
【図9】歩行型草刈機の伝動系統図
【図10】歩行型草刈機の伝動構造を示す縦断背面図
【図11】歩行型草刈機の伝動構造を示す横断平面図
【図12】刈刃クラッチの斜視図
【図13】前進させた場合における刈刃の傾斜状況を説明する概略右側面図
【図14】後進させた場合における刈刃の傾斜状況を説明する概略右側面図
【発明を実施するための形態】
【0021】
〔歩行型草刈機の全体構成〕
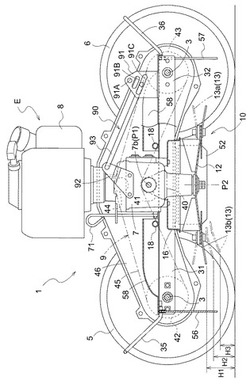
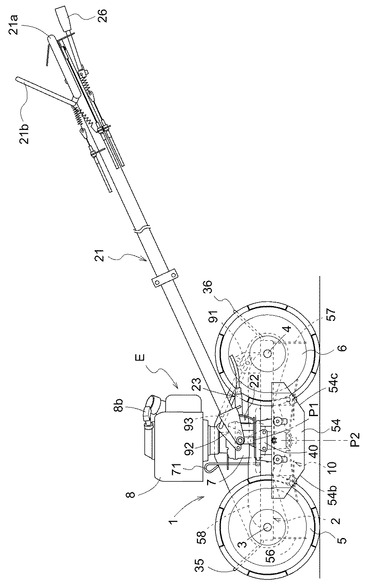
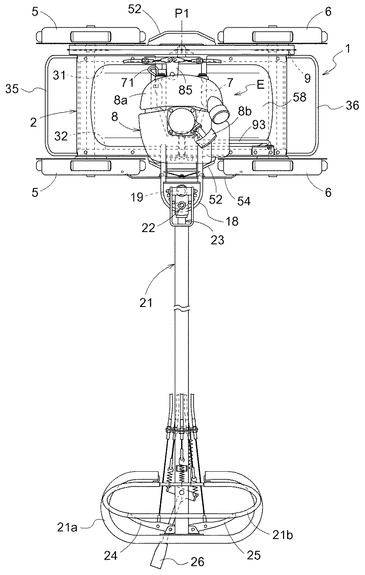
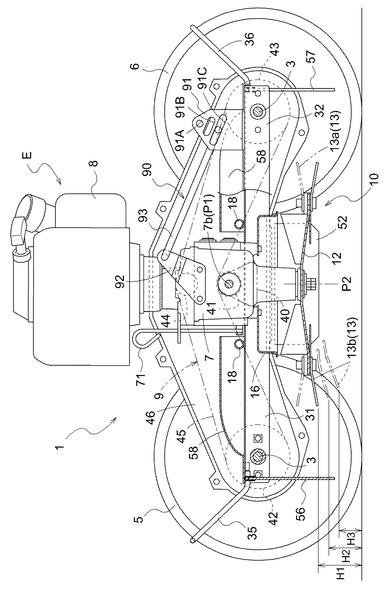
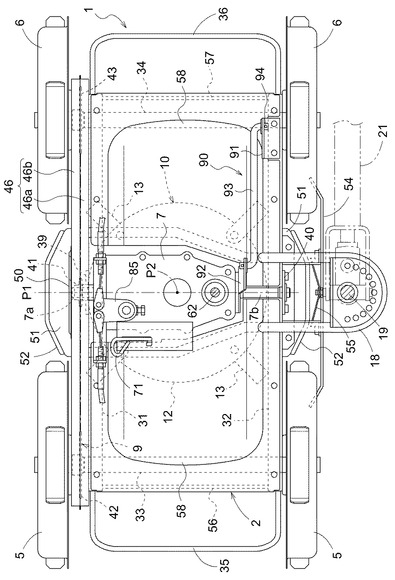
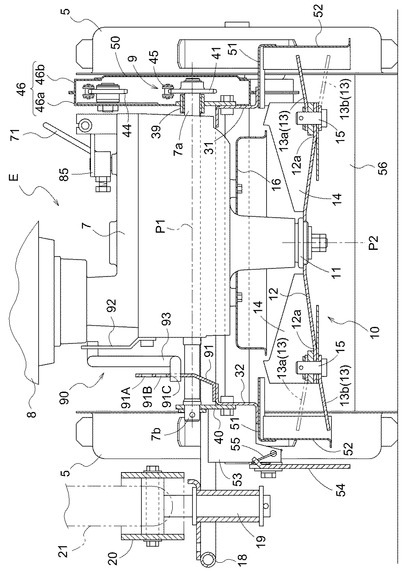
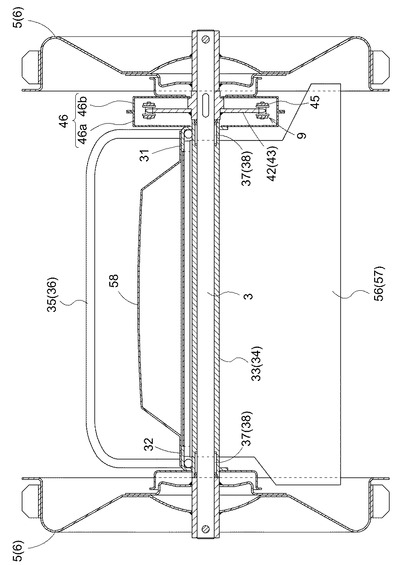
図1〜図6に基づいて、歩行型草刈機の全体構成について説明する。図1及び図2は、歩行型草刈機の全体左側面図及び全体平面図をそれぞれ示し、図3〜図5は、走行機体1の縦断左側面図、横断平面図及び縦断背面図をそれぞれ示す。図6は、前輪5及び後輪6の支持構造を説明する縦断背面図を示す。
【0022】
図1及び図2に示すように、走行機体1に装備された機体フレーム2に前部車軸3及び後部車軸4が枢支されており、この前部車軸3及び後部車軸4の左右両端部のそれぞれに板金製の前輪5,5及び後輪6,6(走行装置に相当)が固定されている。機体フレーム2の上部に伝動ケース7が左右向きの軸心P1周りに揺動自在に支持されており、この伝動ケース7の上部に、燃料タンク8aが一体的に構成されたエンジン8が連動連結されて、原動部Eが構成されている。エンジン8には、リコイル式のスタータ8bが装備されており、このスタータ8bによりエンジン8を駆動できるように構成されている。
【0023】
走行機体1の右側部にはチェーン伝動機構9が配設されており、エンジン8からの動力が伝動ケース7内の伝達経路を介してチェーン伝動機構9に伝達されて前部車軸3及び後部車軸4が回転し、左右の前輪5及び後輪6が回転するように構成されている。伝動ケース7の下部には刈刃10が装着されており、エンジン8からの動力が伝動ケース7内の伝達経路を介して刈刃10に伝達されて刈刃10が回転し、草を刈り取ることができるように構成されている。
【0024】
図4及び図5に示すように、機体フレーム2の上部には、平面視でU字状のフレーム18が固定されており、このフレーム18の機体フレーム2から左方側に延出された端部に、支軸19が上下向きの軸心周りに回動自在に支持されている。支軸19の上端部には、横向きの軸心周りでブラケット20が回動自在に支持されており、このブラケット20にパイプ状の操縦ハンドル21が固定されている。
【0025】
図1及び図2に示すように、操縦ハンドル21は、上下向きの軸心周りに揺動変位可能で、かつ、フレーム18との間に備えた第1ロック機構22の作用で、予め設定した上下向きの軸心周りの複数の揺動位置に選択的に固定保持できるように構成されており、横向きの軸心周りに揺動変位可能で、かつ、フレーム18との間に備えた第2ロック機構23の作用で、予め設定した横向きの軸心周りの複数の揺動位置に選択的に固定保持できるように構成されている。
【0026】
操縦ハンドル21の延出端部には、握り部21aが装備されており、この握り部21aに、ロック状態にバネ付勢された第1ロック機構22のロック解除操作を可能にする第1解除レバー24、及びロック状態にバネ付勢された第2ロック機構23のロック解除操作を可能にする第2解除レバー25が取り付けられて、第1及び第2ロック機構22,23とそれぞれ連係されている。
【0027】
操縦ハンドル21の延出端部には、主クラッチレバー21bが横向きの軸心周りで上下に揺動操作可能に装備されており、後述する主クラッチ63と連係されて、刈刃10の回転の停止、及び走行機体1の停止ができるように構成されている。
【0028】
操縦ハンドル21の後端部には、前進位置、中立位置及び後進位置に切換可能な前後進切換レバー26が上下向きの軸心周りに左右に揺動可能に支持されており、この前後進切換レバー26に後述する操作アーム85が連係されて、前後進切換レバー26の操作により歩行型草刈機の前進、停止(中立)、後進の切換ができるように構成されている。
【0029】
図3,図4,図6に示すように、機体フレーム2は、前後に長い右及び左のメインフレーム31,32と、右及び左のメインフレーム31,32の前端部に亘って設けられた前部フレーム33と、右及び左のメインフレーム31,32の後端部に亘って設けられた後部フレーム34とを備えて構成されている。
【0030】
前部及び後部フレーム33,34は、円筒状の部材により構成されており、前部フレーム33に、左右の軸受部材37を介して左右向きの前部車軸3が回動自在に内嵌され、後部フレーム34に、左右の軸受部材38を介して左右向きの後部車軸4が回動自在に内嵌されている。
【0031】
右及び左のメインフレーム31,32の前端部に亘って走行機体1の前部を保護する前部ロッド35が装着され、右及び左のメインフレーム31,32後端部に亘って走行機体1の後部を保護する後部ロッド36が装着されている。
【0032】
図3〜図5に示すように、伝動ケース7から右方に駆動軸7aが延出されており、この駆動軸7aが右のメインフレーム31に軸受部材39を介して回動自在に支持されている。伝動ケース7から左方に駆動軸7aと同心状の揺動支軸7bが延出されており、この揺動支軸7bが左のメインフレーム32に軸受部材40を介して左右向きの軸心P1周りに回動自在に支持されている。これにより、伝動ケース7、伝動ケース7に装着されたエンジン8、及び刈刃10等を左右向きの軸心P1周りで機体フレーム2に一体で前後揺動可能に支持することができる。
【0033】
駆動軸7a及び揺動支軸7bの左右向きの軸心P1の側面視での前後方向の位置は、駆動軸7a及び揺動支軸7bによって支持される伝動ケース7、エンジン8及び刈刃10等の前後方向での重心位置の近傍に位置するように配設されており、駆動軸7aを停止させて伝動ケース7等に慣性力が働いていない状態では、刈刃10が地面と略水平な状態に維持され、駆動軸7aを回転させて伝動ケース7等に慣性力が作用する状態では、伝動ケース7等の自重による軸心P1周りの力より駆動軸7aを回転させることによる慣性力の方が大きくなって、刈刃10が前下がり傾斜姿勢及び後下がり傾斜姿勢に姿勢変更されるように構成されている(図13及び図14参照)。
【0034】
図3〜図6に示すように、右のメインフレーム31の右外側には、チェーン伝動機構9が装備されている。チェーン伝動機構9は、駆動軸7aの右外端部に連動連結された駆動スプロケット41と、前部車軸3の右外端部に連動連結された前部スプロケット42と、後部車軸4の右外端部に連動連結された後部スプロケット43と、駆動スプロケット41の上部に配設されたテンションスプロケット44と、駆動スプロケット41、前部及び後部スプロケット42,43、及びテンションスプロケット44に亘って巻回張設された伝動チェーン45とを備えて構成されている。
【0035】
右のメインフレーム31の右側面には、左右に2分割されたチェーンカバー46が装備されており、左のチェーンカバー46aを右のメインフレーム31に固定し、この左のチェーンカバー46aに右外方側から右のチェーンカバー46bを締め付け固定することで、チェーン伝動機構9をチェーンカバー46によって覆うことができるように構成されている。
【0036】
左のチェーンカバー46aの前後中央部の上部には、テンションスプロケット44が左右向きの軸心周りで回動自在に支持されている。テンションスプロケット44は、左のチェーンカバー46aに上下方向に位置変更可能に取り付けられており、テンションスプロケット44を上下に位置調節することで、伝動チェーン45の張り具合を調節できるように構成されている。
【0037】
右のチェーンカバー46bの前後中央部には、右外方からカバー50が着脱可能に取り付けられており、このカバー50を取り外すことで、チェーンカバー46内の点検ができるように構成されている。
【0038】
前部車軸3及び後部車軸4の左右両端部には、横外方側から左右の前輪5,5及び後輪6,6が外嵌挿入されて、前部車軸3及び後部車軸4と一体回動可能に固定されている。エンジン8からの動力が伝動ケース7を介して駆動軸7aに伝達されてチェーン伝動機構9を介して前部車軸3及び後部車軸4が回転すると、前輪5及び後輪6が回転し歩行型草刈機が前進又は後進するように構成されている。
【0039】
上記のように、走行機体1の機体フレーム2に、伝動ケース7から延出した駆動軸7a及び揺動支軸7bを左右方向の軸心P1周りに揺動可能に支持し、エンジン8からの動力を伝動ケース7を介して駆動軸7aに伝達し、駆動軸7aからの動力によりチェーン伝動機構9を介して前輪5及び後輪6を回転させることにより、走行機体1を前進させると刈刃10の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更され、走行機体1を後進させると刈刃10の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される傾斜姿勢変更機構が構成されている(図13及び図14参照)。
【0040】
〔カバーの詳細構造〕
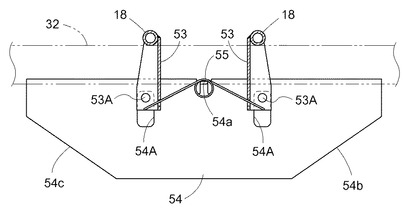
図4〜図7に基づいて、走行機体1に装着されているカバーの詳細構造について説明する。図7は、可動飛散防止カバー54の構造を説明する機体内側から見た縦断側面図を示す。
【0041】
図4及び図5に示すように、右及び左のメインフレーム31,32の前後中央部下面側に、左右の上側カバー51が固定されており、この左右の上側カバー51に左右の固定飛散防止カバー52が固定されている。左の固定飛散防止カバー52の下端と地面との間の隙間は、右の飛散防止カバー52の下端と地面との間の隙間より広く設定されており、左の飛散防止カバー52は、後述する可動飛散防止カバー54との協働で、刈草の左側への飛散を防止できるように構成されている。
【0042】
図5及び図7に示すように、フレーム18から下方に、前後のブラケット53が延出されており、この前後のブラケット53に可動飛散防止カバー54が装着されている。可動飛散防止カバー54には、上下に長い前後の長穴54Aが形成されており、この前後の長穴54Aに前後のブラケット53から左側方に延出された前後のピン53Aが連通されている。可動飛散防止カバー54の上部には、内方側に突出したバネ取付部54aが設けられており、このバネ取付部54aと前後のブラケット53とに亘って弾性バネ55が装着されている。
【0043】
可動飛散防止カバー54の前端部下部には、側面視で前方上方に切り欠かれた前部傾斜部54bが形成されており、可動飛散防止カバー54の後端部下部には、側面視で後方上方に切り欠かれた後部傾斜部54cが形成されている。これにより、例えば歩行型草刈機を前進させて左側前方からの石等の障害物が可動飛散防止カバー54に接当すると、可動飛散防止カバー54に形成した長穴54Aにより弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方へ移動する。逆に、歩行型草刈機を後進させて左側後方から石等の障害物が可動飛散防止カバー54に接当すると、可動飛散防止カバー54に形成した長穴54Aにより弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方に移動する。
【0044】
図4及び図5に示すように、可動飛散防止カバー54の前部及び後部は、左の前輪5及び後輪6の外面に沿うように配設され、前端部及び後端部がそれぞれ内方側に折り曲げられた形状に成形されて、この内方側に折り曲げられた前端部及び後端部が平面視で前輪5及び後輪6と重なるように配設されている。また、可動飛散防止カバー54の下端と地面との間の隙間は、右の固定飛散防止カバー52の下端と地面との間の隙間と略同じに設定されている。これにより、可動飛散防止カバー54の下端と地面との間の隙間、及び可動飛散防止カバー54と前輪5及び後輪6との隙間を小さく設定でき、刈草の左側方への飛散を効果的に防止できる。
【0045】
上記のように可動飛散防止カバー54を構成することにより、通常時には、弾性バネ55の付勢力により可動飛散防止カバー54を下方側に付勢して前輪5と後輪6との間を広く可動飛散防止カバー54によって側方から覆うことができ、障害物に接当した時には、弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方へ移動して可動飛散防止カバー54の破損を防止できる。なお、走行機体1の右側に可動飛散防止カバー54を設けてもよく、走行機体1の左右両側に可動飛散防止カバー54を設けてもよい。
【0046】
図3及び図6に示すように、右及び左のメインフレーム31,32に亘って設けられた前部フレーム33には、左右の前輪5の間を覆うゴム製の前部飛散防止部材56が左右方向の軸心周りで前後に揺動可能に装着されており、右及び左のメインフレーム31,32に亘って設けられた後部フレーム34には、左右の後輪6の間を覆うゴム製の後部飛散防止部材57が左右方向の軸心周りで前後に揺動可能に装着されている。前部及び後部飛散防止カバー56,57の左右両端部は、それぞれ前輪5及び後輪6の内側に入り込むような形状に成形されており、これにより、刈草の前方及び後方への飛散を効果的に防止できる。
【0047】
図4及び図6に示すように、機体フレーム2は、前後に2分割された前後の上部カバー58によって上方から覆われている。前後の上部カバー58の中央部は上方へ膨出した形状に成形され、外周部が水平な形状に成形されており、前後の上部カバー58の水平な形状に成形された左右両側部が右及び左のメインフレーム31,32の上面側の複数箇所に締め付け固定されている。
【0048】
〔刈刃の詳細構造〕
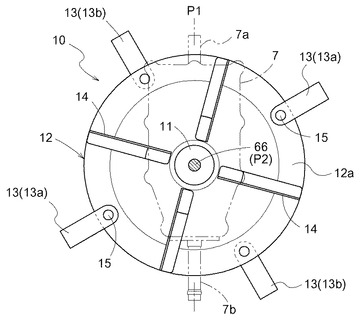
図5及び図8に基づいて、刈刃10の詳細構造について説明する。図8は、刈刃10の構造を説明する横断平面図を示す。
【0049】
図5及び図8に示すように、刈刃10は、伝動ケース7の下部に刈刃10を装着するボス部材11と、このボス部材11に固着された回転円板12と、回転円板12に外周部に回動自在に支持された複数の刈刃体13と、回転円板12の上面側に固定された複数の拡散羽根14とを備えて構成されている。
【0050】
回転円板12は、ボス部材11との固定部から外方側に徐々に地面との間の距離が狭くなるように外方下方へ傾斜した下向きの皿状に成形され、外周部に地面と略水平な水平部12aが形成されている。刈刃体13は、斜め外方側上方に傾斜する形状に成形された上側刈刃体13aと、斜め外方側下方に傾斜する形状に成形された下側刈刃体13bとによって構成されており、回転円板12の外周部の水平部12aの複数箇所に、上側刈刃体13aと下側刈刃体13bとが交互に、約90度の等ピッチでピン15により回動自在に支持されている。
【0051】
拡散羽根14は、外方側に向かうに従って徐々に羽根の面積が広くなるように、その上端部が斜め外方上方に傾斜する形状に成形されており、軸心P2から互いに隣接する刈刃体13の中間位置を、放射状に約90度の等ピッチで配設されている。
【0052】
伝動ケース7の下部には、刈刃カバー16が装着されており、この刈刃カバー16により、刈草の回転中心側への入り込みが阻止されて、回転中心での刈草の巻き付きを防止できるように構成されている。
【0053】
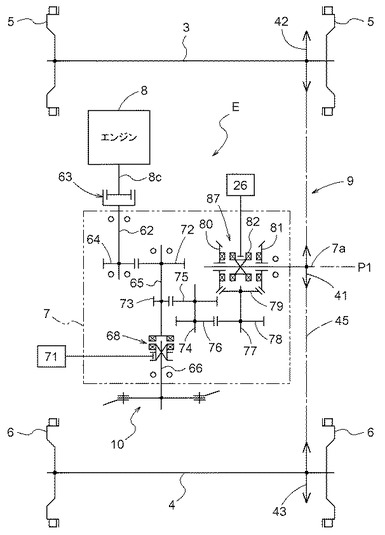
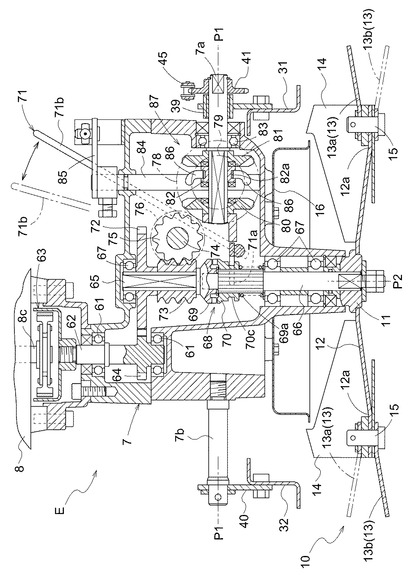
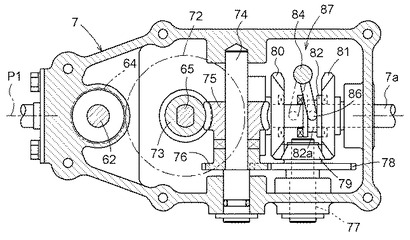
〔歩行型草刈機の伝動構造〕
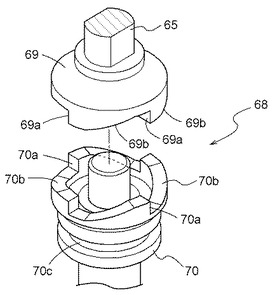
図9〜図12に基づいて、歩行型草刈機の伝動構造について説明する。図9は、歩行型草刈機の伝動系統図を示し、図10及び図11は、歩行型草刈機の伝動構造の縦断背面図及び横断平面図をそれぞれ示す。また、図12は、刈刃クラッチ68の斜視図を示す。
【0054】
図9〜図11に示すように、伝動ケース7の上部に一対のベアリング61を介して上下向き入力軸62が回動自在に支持されており、この入力軸62の上端部が伝動ケース7の上部に固定されたエンジン8の出力軸8cに主クラッチ63を介して連結されている。入力軸62の下部に、伝動ギア64が一体回動可能に連結されており、この伝動ギア64が後述する上部伝動軸65に連動連結された伝動ギア72に咬合されている。
【0055】
伝動ケース7の上下向きの軸心P2周りに同心状に配設された上部伝動軸65及び下部伝動軸66が複数のベアリング67を介して回動自在に支持されており、上部伝動軸65と下部伝動軸66とに亘って刈刃クラッチ68が装着されている。下部伝動軸66の下端部には、刈刃10のボス部材11が下方側から締め付け固定されており、刈刃クラッチ68を入り側に操作すると、エンジン8からの動力が入力軸62、上部伝動軸65、及び刈刃クラッチ68を介して下部伝動軸66に伝達されて刈刃10が回転するように構成されている。
【0056】
図10及び図12に示すように、刈刃クラッチ68は、上部伝動軸65に連動連結された上部クラッチ69と、下部伝動軸66に一体回動可能でかつスプライン構造により上下にスライド移動可能に外嵌された下部クラッチ70とを備えて構成されており、上部クラッチ69及び下部クラッチ70には、互いに係合する係合片69a,70aがそれぞれ形
成されている。
【0057】
下部クラッチ70の下面側とベアリング67の上面側とに亘って下部クラッチ70を上方に付勢する弾性バネ68aが装着されており、この弾性バネ68aにより刈刃クラッチ68が入り側に付勢されるように構成されている。
【0058】
係合片69a,70aには、斜めに傾斜した傾斜部69b,70bが形成されており、エンジン8からの動力が上部伝動軸65を介して下部伝動軸66に伝達される状態では、上部クラッチ69の係合片69aと下部クラッチ70の係合片70aとが噛み合ってエンジン8からの動力が下部伝動軸66に伝達される。
【0059】
例えば、エンジン8を停止させて上部伝動軸65の回転が停止した状態で、刈刃10が慣性力により回転して、刈刃10からの慣性力が下部伝動軸66から上部伝動軸65に伝達されようとすると、係合片69a,70aの傾斜部69b,70bにより上部クラッチ69に対して下部クラッチ70が相対回転して滑り、下部伝動軸66からの慣性力の上部伝動軸65への伝達が遮断される。刈刃10の慣性力による回転が止まると、弾性バネ68aの付勢力により下部クラッチ70が上方へ操作され、刈刃クラッチ68が入り側に操作される。
【0060】
これにより、刈刃10の慣性力の伝動上流側(エンジン8側及び駆動軸7b側)への連れ回り(例えば刈刃10の慣性力により前輪5及び後輪6が動くこと等)を防止できると共に、例えば刈刃10の回転を強制的に制動するブレーキ装置等(図示せず)を刈刃10の伝動上流側(例えば上部伝動軸65又は下部伝動軸66等)に装備して、エンジン8を停止させた際の刈刃10の回転による慣性力が伝動上流側に伝達されないように構成する場合に比べ、刈刃10からの慣性力の伝動上流側への伝達を抑制する機構を簡素化することができ、製造コストを削減できる。
【0061】
下部クラッチ70は、刈刃クラッチ68のシフト部材としても機能するように、下部クラッチ70の下部の外周部にシフト溝70cが形成されており、このシフト溝70cに、前後向きの軸心周りで左右に揺動可能に支持されたシフトレバー71の操作部71aが係合されて、シフトレバー71のレバー本体71bを揺動操作すると下部クラッチ70が上下にスライド移動して刈刃クラッチ68の断接ができるように構成されている。
【0062】
図9〜図11に示すように、上部伝動軸65には、伝動ギア72,73が連動連結され
ており、伝動ギア72が入力軸62に固定された伝動ギア64に咬合されている。伝動ケース7に回動自在に支持された前後向きの伝動軸74に伝動ギア75が連動連結されており、この伝動ギア75が上部伝動軸65に連動連結された伝動ギア73に咬合されて、上下向きの上部伝動軸65からの動力が90度角度変更されて前後向きの伝動軸74に伝達されるように構成されている。伝動軸74には、伝動ギア76が連動連結されており、この伝動ギア76が伝動軸74の右下側に配設され伝動軸77に連動連結された伝動ギア78に咬合されている。
【0063】
伝動軸77には、ベベルギア79が連動連結されており、このベベルギア79が左右向きの駆動軸7aに外嵌された前進用ベベルギア80及び後進用ベベルギア81に咬合されている。駆動軸7aは、伝動ケース7にベアリング83を介して左右向きの軸心P1周りに回動自在に支持されており、この駆動軸7aに、前進用及び後進用ベベルギア80,81が回動自在に外嵌され、前進用ベベルギア80と後進用ベベルギア81との間にシフト部材82が左右方向にスライド移動可能でかつ駆動軸7aと一体回動可能に外嵌されている。
【0064】
伝動ケース7には、操作軸84が上下向きの軸心周りに回動自在に支持されており、この操作軸84の上端部及び下端部に操作アーム85及び上下の操作部材86が連結されている。シフト部材82の外周部には、シフト溝82aが形成されており、このシフト溝82aに操作軸84に連結された操作部材86が係合されている。操作アーム85を前後に揺動操作するとシフト部材82が左右方向にスライド移動して前進用ベベルギア80又は後進用ベベルギア81に噛み合い、走行機体1の前進、停止(中立)及び後進の切換ができるように構成されている。このように、ベベルギア79、前進用ベベルギア80、後進用ベベルギア、シフト部材82等により、前後進クラッチ87が構成されている。
【0065】
図1及び図2に示すように、操作アーム85は、操縦ハンドル21に装備された前後進切換レバー26に連係されており、前後進切換レバー26を前進側(左側)に揺動操作すると、操作アーム85が後方に揺動操作されてシフト部材82が前進用ベベルギア80に咬合し前後進クラッチ87が前進側に入り操作され、ベベルギア79からの動力が前進用ベベルギア80及びシフト部材82を介して駆動軸7aに伝達されて、駆動軸7aが正回転駆動する。一方、前後進切換レバー21を後進側(右側)に揺動操作すると、操作アーム85が前方に揺動操作されてシフト部材82が後進用ベベルギア81に咬合し前後進クラッチ87が後進側に入り操作され、ベベルギア79からの動力が後進用ベベルギア81及びシフト部材82を介して駆動軸7aに伝達されて、駆動軸7aが逆回転駆動する。
【0066】
図9〜図11に示すように、駆動軸7aの右端部には、チェーン伝動機構9の駆動スプロケット41が連動連結されており、駆動軸7aからの動力がチェーン伝動機構9を介して前部車軸3及び後部車軸4に伝達されて、前輪5及び後輪6が正逆転し、走行機体1が前進又は後進する。
【0067】
〔刈高さ調節機構の詳細構造〕
図3及び図4に基づいて、刈高さ調節機構90(傾斜角度調節機構に相当)の詳細構造について説明する。図3及び図4に示すように、左のメインフレーム32の後部上面側に締め付け固定されたブラケット91と、伝動ケース7の左側部に締め付け固定された板状のブラケット92とに亘って連係ロッド93を連係することで、刈高さの下限範囲を規制する刈高さ調節機構90が構成されている。
【0068】
ブラケット91は、板材をL字状に折り曲げ成形して構成されており、左のメインフレーム32との固定部分から上方に延出された部分に3つの調節穴91A,91B,91Cが加工されている。上側の調節穴91Aは、丸穴に成形されており、中央の調節穴91B及び下側の調節穴91Cは、それぞれ前後に長い長穴に成形されている。後述する刈高さH1,H2,H3が略等しい間隔で高くなるように、調節穴91B,91Cの長穴の長さが徐々に長くなるように設定されている。
【0069】
連係ロッド93の前端部及び後端部は、それぞれ内方側及び外方側に折り曲げられた形状に成形されており、連係ロッド93の前端部をブラケット92上部の左右向きの貫通穴に連係し、連係ロッド93の後端部をブラケット91の調節穴91A,91B,91Cのいずれか一つにピン94で連係することで、左右向きの軸心P1周りでの伝動ケース7等の揺動範囲の上限を規制できるように構成されている。
【0070】
連係ロッド93の後端部を調節穴91Aに連係すると、左右向きの軸心P1周りでの伝動ケース7の揺動が規制されて、エンジン8を駆動して刈刃10を回転させたとしても、刈刃10の下端部の高さはH1のままで変化しない。
【0071】
連係ロッド93の後端部を調節穴91Bに連係すると、連係ロッド93の後端部の移動が調節穴91Bの長穴の範囲で許容され、左右向きの軸心P1周りでの伝動ケース7等の前方及び後方への揺動が調節穴91Bの長穴の範囲で許容される。例えばエンジン8を駆動させて前後進切換レバー26を前進側に操作すると、伝動ケース7の下端部に連結された刈刃10が、地面と略水平な高さH1から調節穴91Bで許容された範囲で傾斜する。そして、連係ロッド93の後端部が調節穴91Bの先端に接当して、刈刃10の下端部の高さが自動的に高さH2に変更されて、その高さH2が維持される。
【0072】
連係ロッド93の後端部を調節穴91Cに連係すると、連係ロッド93の後端部の移動が調節穴91Cの長穴の範囲で許容され、左右向きの軸心P1周りでの伝動ケース7等の前方及び後方への揺動が調節穴91Cの長穴の範囲で許容される。例えばエンジン8を駆動させて前後進切換レバー26を前進側に操作すると、伝動ケース7の下端部に連結された刈刃10が、地面と略水平な高さH1から調節穴91Cで許容された範囲で傾斜する。そして、連係ロッド93の後端部が調節穴91Cの先端に接当して、刈刃10の下端部の高さが自動的に高さH3に変更されて、その高さH3が維持される。
【0073】
なお、エンジン8を停止させるか、又は前後進切換レバー26を停止側(中立側)に操作すると、刈刃10の高さが自動的に地面と略水平な高さH1に変更される。
【0074】
以上のように刈高さ調節機構90を構成することにより、ピン94を脱着して連係ロッド93の後端部の調節穴91A,91B,91Cへの連係位置を変更することで、伝動ケース7の揺動範囲を変更して、刈刃10の下端部の高さをH1,H2,H3の3段階で変更調節することができ、刈刃10による刈高さ(後述する刈刃10の前下がり傾斜角度α(後下がり傾斜角度α))を3段階で変更調節できる。
【0075】
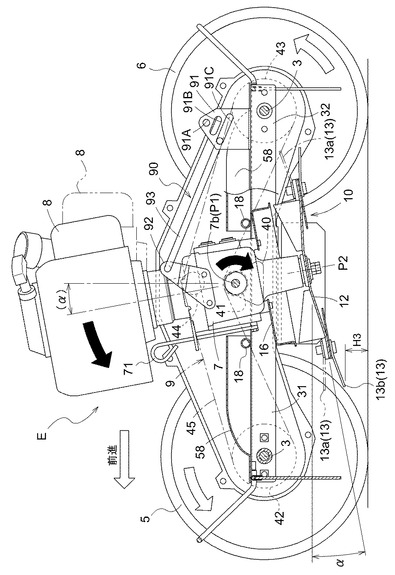
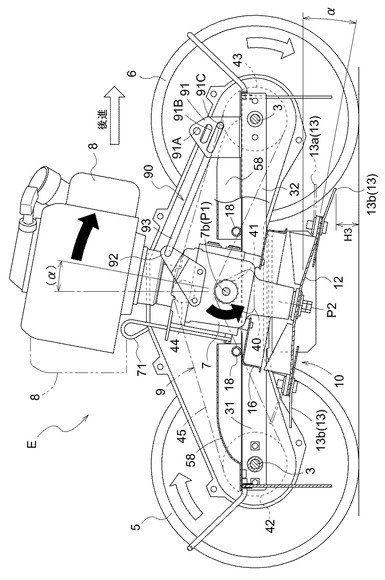
〔刈刃の傾斜状況の説明〕
図13及び図14に基づいて,刈刃10の傾斜状況について説明する。図13は、走行機体1を前進させた前下がり傾斜姿勢での刈刃10の傾斜状況を示し、図14は、走行機体1を後進させた後下がり傾斜姿勢での刈刃10の傾斜状況を示す。
【0076】
図13に示すように、刈刃10が回転していない地面と略水平になった状態から、エンジン8を駆動させて前後進切換レバー26を前進側に切り換えると、駆動軸7aが左右向きの軸心P1周りに図13の黒矢印で示す時計回りに回転する。駆動軸7aが時計回りに回転すると、力の作用反作用の法則により、図13の黒矢印で示す駆動軸7aが回転する方向とは逆の反時計回りの方向の力が伝動ケース7に作用する。伝動ケース7に反時計回りの力が作用すると、伝動ケース7、伝動ケース7に連結されたエンジン8、及び刈刃10が一体で左右向きの軸心P1周りで前方へ揺動し、刈高さ調節機構90により揺動範囲が規制され(図13では、刈高さをH3に設定した場合)、伝動ケース7、エンジン8及び刈刃10が水平時よりも角度α前下がり傾斜した状態になる。
【0077】
一方、図14に示すように、刈刃10が回転していない地面と略水平になった状態から、エンジン8を駆動させて前後進切換レバー26を後進側に切り換えると、駆動軸7aが左右向きの軸心P1周りに図14の黒矢印で示す反時計回りに回転する。駆動軸7aが反時計回りに回転すると、力の作用反作用の法則により、図14の黒矢印で示す駆動軸7aが回転する方向とは逆の時計回りの方向の力が伝動ケース7に作用する。伝動ケース7に時計回りの力が作用すると、伝動ケース7、並びに伝動ケース7に連結されたエンジン8及び刈刃10が一体で左右向きの軸心P1周りで後方へ揺動し、刈高さ調節機構90により揺動範囲が規制されて(図14では、刈高さをH3に設定した場合)、伝動ケース7、エンジン8及び刈刃10が水平時よりも角度α後下がり傾斜した状態になる。
【0078】
すなわち、エンジン8を駆動させて前後進切替レバー26を前進側又は後進側に切り替え、走行機体1を前進又は後進させると、自動的に刈高さ調節機構90により設定した刈高さに刈刃10が自動的に揺動し、予め刈高さ調節機構90により設定された刈刃10の刈高さで刈取作業を行うことができる。
【0079】
上記のように、刈刃10を前下がり傾斜又は後下がり傾斜させて草を刈り取ることにより、刈刃10の前下がり傾斜又は後下がり傾斜させた下端部(前端部又は後端部)が最も草(地面)に近い位置になり、その位置から走行方向に対しての逆方向に向かうに従って、刈刃10と刈刃10の下側を通過する草(地面)との間の隙間が徐々に広くなる。その結果、刈刃10の下面側と刈刃10の下側を通過する草(地面)との接触面積が小さくなり、刈刃10の下面側に作用する刈り取った草(地面)からの抵抗が小さくなって、草を刈り取る際における刈刃10に作用する負荷を軽減することができる。
【0080】
その結果、例えば刈刃10が地面と略水平な状態で草を刈り取るように構成する場合に比べ、刈刃10を回転駆動させる動力(草を刈り取る動力)が小さくなって、エンジン8の小型化及び軽量化を実現でき(例えば草を刈り取る能力を確保しながら馬力の小さいエンジンに設定することができ)、歩行型草刈機のコンパクト化及び軽量化を実現できる。
【0081】
[発明の実施の第1別形態]
前述の[発明を実施するための最良の形態]においては、走行機体1の伝動ケース7から延出した駆動軸7a及び揺動支軸7bを左右方向の軸心P1周りに揺動可能に支持して、刈刃10を前下がり傾斜姿勢及び後下がり傾斜姿勢に姿勢変更するように、傾斜姿勢変更機構を構成した例を示したが、走行機体1に刈刃10を左右軸心周りに揺動可能に支持するのであれば、異なる構成を採用してもよい。
【0082】
具体的には、例えば伝動ケース7の下部に刈刃10を左右軸心周りに揺動可能に支持する構成(図示せず)を採用してもよく、エンジン8及び伝動ケース7とは別に、刈刃10を機体フレーム2に左右軸心周りに揺動可能に支持する構成(図示せず)を採用してもよい。
【0083】
[発明の実施の第2別形態]
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、駆動軸7aからの動力を、チェーン伝動機構9を介して前輪5及び後輪6に伝達するように構成した例を示したが、駆動軸7aからの動力を異なる伝動機構を介して前輪5及び後輪6に伝達するように構成してもよく、例えばVベルトやタイミングベルト等のベルト伝動機構(図示せず)を採用してもよく、ドライブシャフト(図示せず)を採用してもよい。
【0084】
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、ブラケット91とブラケット92とに亘って連係ロッド93を連係することで刈高さ調節機構90を構成した例を示したが、刈高さ調節機構90として異なる機構を採用してもよく、例えば機体フレーム2側に、揺動するエンジン8又は伝動ケース7の揺動範囲の上限を規制する規制具(図示せず)を設けるように、刈高さ調節機構90を構成してもよい。
【0085】
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、刈刃10による刈高さを3段階で変更調節できるように、刈高さ調節機構90を構成した例を示したが、刈刃10による刈高さを異なる段階(例えば2段階のように少ない段階、又は4段階,5段階等のように多い段階)で変更調節できるように、刈高さ調節機構90を構成してもよい。また、刈刃10による刈高さを段階的に変更調節するのではなく、無段階で変更調節できるように、刈高さ調節機構90を構成してもよく、このように構成することで、刈刃10による刈高さの微調節を行うことができ、刈取作業の作業性を更に向上できる。
【0086】
具体的には、例えば、揺動しない機体フレーム2側に、揺動するエンジン8又は伝動ケース7の揺動範囲の上限を規制する規制具(図示せず)を設け、この規制具を調節することによりエンジン8又は伝動ケース7の揺動範囲の上限を無段階で規制するように、刈高さ調節機構90を構成する。
【0087】
[発明の実施の第3別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]における刈刃10に代えて、バーブレード(図示せず)を採用してもよい。
【0088】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、走行装置として前輪5及び後輪6を採用した例を示したが、前輪5及び後輪6に代えて、車輪を3点配置した3輪走行仕様(図示せず)や、クローラ走行装置(図示せず)を採用してもよい。
【0089】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、エンジン8からの動力で前輪5及び後輪6を駆動するように構成した例を示したが、前輪5又は後輪6を遊転輪とし、エンジン8からの動力で前輪5又は後輪6が駆動するように、歩行型草刈機を構成してもよい。
【0090】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、原動部Eとしてエンジン8を採用した草刈機を例に示したが、原動部Eとして異なる構成を採用してもよく、例えばエンジン8に代えてバッテリーや商用電源等の電力により駆動する電動モータ(図示せず)を採用してもよい。
【0091】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、伝動ケース7の上部にエンジン8を連動連結して原動部Eを構成した例に示したが、伝動ケース7とエンジン8とを一体構成した原動部E(図示せず)を採用してもよい。また、簡易には、伝動ケース7を省略して原動部Eをエンジン8のみで構成してもよい(図示せず)。この場合、エンジン8から走行装置(車輪等)への左右向きの駆動軸及び揺動支軸を延出し、エンジン8の下部から刈刃10への下向きの伝動軸を延出して、エンジン8を機体フレーム2に左右軸心周りに揺動可能に支持する(図示せず)。
【符号の説明】
【0092】
1 走行機体
5 前輪(走行装置)
6 後輪(走行装置)
7a 駆動軸
7b 揺動支軸
10 刈刃
90 刈高さ調節機構(傾斜角度調節機構)
E 原動部
P1 軸心(左右軸心)
P2 軸心(上下軸心)
α 前下がり傾斜角度,後下がり傾斜角度
【技術分野】
【0001】
本発明は、走行機体に、原動部と、原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機に関する。
【背景技術】
【0002】
従来の技術としては、例えば特許文献1に開示されているように、走行車輪(特許文献1の図1の4)を備えた走行機体にエンジン(特許文献1の図1の5)を搭載し、このエンジンからの動力により回動する刈刃(特許文献1の図1の2)を備えた歩行型草刈機が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−53991号公報(図1,図2,図13,図14参照)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の歩行型草刈機では、刈刃を構成する基盤(特許文献1の図13の66)や刃片(特許文献1の図13の67)が地面と略水平になるように、駆動ケース(特許文献1の図13の9)の下部に刈刃が装着されて、歩行型草刈機を前進させると、前方から導入された草は刈刃の前部で刈り取られ、歩行型草刈機を後進させると、後方から導入された草が刈刃の後部で刈り取られるように構成されていた。
【0005】
そのため、刈刃のうちの実際に草を刈り取る部分は刈刃の前部又は後部であるにも関わらず、歩行型草刈機を前進させる場合においても、歩行型草刈機を後進させる場合においても、刈刃の下面側が略全域に亘って地面と近い位置に位置することになり、刈刃の下側を通過する刈り取られた後の地面に生えた草が刈刃を回転させる抵抗になり易かった。その結果、刈刃の駆動によるエンジンの負荷が大きくなって、エンジンの小型化及び歩行型草刈機の軽量化を図る観点から改善の余地があった。
本発明は、走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を回転させる動力を節約することができる歩行型草刈機を簡素な構造で実現することを目的とする。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、走行機体に、原動部と、前記原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機において、次のように構成することにある。
前記走行機体に、前記刈刃を上下軸心周りに回動自在に、且つ左右軸心周りに揺動可能に支持すると共に、
前記走行機体を前進させると前記刈刃の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更され、前記走行機体を後進させると前記刈刃の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される傾斜姿勢変更機構を備える。
【0007】
(作用)
本発明の第1特徴によると、走行機体を前進(後進)させることにより、前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更された刈刃の前部(後部)により前方から導入され
た草を刈り取ることができる。この場合、刈刃が前下がり傾斜姿勢(後下がり傾斜姿勢)でも、草を刈り取るのは刈刃の前側(後側)であるので、前方(後方)から導入された草を支障なく刈り取ることができる。前下がり傾斜姿勢(後下がり傾斜姿勢)では、刈刃の後側(前側)が上方に離れているため、刈刃の下側を通過する草が刈刃を回転させる抵抗になり難くなって、刈刃の駆動による原動部の負荷を小さくすることができる。その結果、走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を駆動する原動部の出力を小さく設定することができ、刈刃を回転させる動力を節約できる。
【0008】
本発明の第1特徴によると、刈刃は走行機体に左右軸心周りで揺動可能に支持されているため、走行機体に対して刈刃を揺動させることで、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を容易に現出することができる。その結果、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢の切り換えを容易に行うことができ、傾斜姿勢変更機構の構造を簡素化できる。
【0009】
(発明の効果)
本発明の第1特徴によると、原動部の小型化及び歩行型草刈機の軽量化を図ることができると共に、歩行型草刈機の製造コストを削減できる。
【0010】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の歩行型草刈機において、次のように構成することにある。
前記原動部の下部に前記刈刃を上下軸心周りに回動自在に支持すると共に、
前記走行機体に、前記原動部を左右軸心周りに揺動可能に支持して、前記傾斜姿勢変更機構を構成する。
【0011】
(作用)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第2特徴によると、原動部を走行機体に対して左右軸心周りに揺動させることで、刈刃が原動部と一体で走行機体に対して左右軸心周りに揺動し、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を容易に現出することができる。また、例えば刈刃のみを左右軸心周りに揺動するように構成すると、刈刃と原動部との接続構造が複雑になるおそれがあるが、原動部及び刈刃を一体で左右軸心周りに揺動することで、刈刃と原動部との接続構造が複雑になることを防止できる。その結果、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢の切り換えを更に容易に行うことができ、傾斜姿勢変更機構の構造を更に簡素化できる。
【0012】
(発明の効果)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第2特徴によると、歩行型草刈機の更なる軽量化を図ることができると共に、歩行型草刈機の製造コストを更に削減できる。
【0013】
[III]
(構成)
本発明の第3特徴は、本発明の第2特徴の歩行型草刈機において、次のように構成することにある。
前記原動部の左右両側部から左右向きで同心状の駆動軸及び揺動支軸を延出すると共に、前記駆動軸を介して前記原動部からの動力を前記走行装置に伝達し、
前記駆動軸及び揺動支軸を前記走行機体に左右軸心周りで回動可能に支持して、前記傾斜姿勢変更機構を構成する。
【0014】
(作用)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第3特徴によると、原動部からの動力により駆動軸を回転させて走行機体を前進(後進)させると、力の作用反作用の法則により、駆動軸が回転する方向と逆方向の力が原動部に作用して原動部及び刈刃が一体で揺動し、刈刃の前側(後側)が下方に揺動した前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更される。その結果、走行装置を駆動させることによる慣性力を有効に活用して自動的に刈刃を前下がり傾斜姿勢(後下がり傾斜姿勢)に姿勢変更することができると共に、走行機体の走行方向を変更することで自動的に前下がり傾斜姿勢及び後下がり傾斜姿勢を切り替えることができる。
【0015】
具体的には、例えば図13に示すように、走行機体を前進させて駆動軸(図13の7a)が左右軸心周り(図13のP1)に時計回りで回転すると、力の作用反作用の法則により、駆動軸の左右軸心周りでの反時計回りの力が原動部(図13のE)に作用して原動部及び刈刃(図13の10)が一体で前方に揺動し、刈刃の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更される。また、例えば図14に示すように、走行機体を後進させて駆動軸を左右軸心周りで反時計回りに回転すると、力の作用反作用の法則により、駆動軸の左右軸心周りで時計回りの力が原動部(図14のE)に作用して原動部及び刈刃(図14の10)が一体で後方に揺動し、刈刃(図14の10)の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される。
【0016】
(発明の効果)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第3特徴によると、刈刃の前下がり傾斜姿勢及び後下がり傾斜姿勢を簡易迅速に切り換えることができ、刈取作業の作業性を向上できると共に、傾斜姿勢変更機構の構造を更に簡素化できる。
【0017】
[IV]
(構成)
本発明の第4特徴は、本発明の第1特徴〜第3特徴のうちのいずれか一つに記載の歩行型草刈機において、次のように構成することにある。
前記前下がり傾斜姿勢での刈刃の前下がり傾斜角度又は前記後下がり傾斜姿勢での刈刃の後下がり傾斜角度を変更調節可能な傾斜角度調節機構を備える。
【0018】
(作用)
本発明の第4特徴によると、本発明の第1特徴〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第4特徴によると、傾斜角度調節機構により刈刃の前下がり傾斜角度又は後下がり傾斜角度を変更することで、刈刃の高さを変更することができ、草の長さに応じて傾斜角度調節機構を調節して長く又は短く草を刈り取ることができる。その結果、草の刈高さを変更調節する機構を簡素化することができ、草の刈高さを変更調節する機構の部品点数を削減できる。
【0019】
(発明の効果)
本発明の第4特徴によると、本発明の第1特徴〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第4特徴によると、草の刈高さを変更可能に構成しながら、歩行型草刈機の製造コストを低く抑えることができる。
【図面の簡単な説明】
【0020】
【図1】歩行型草刈機の全体左側面図
【図2】歩行型草刈機の全体平面図
【図3】走行機体の縦断左側面図
【図4】走行機体の横断平面図
【図5】走行機体の縦断背面図
【図6】前輪及び後輪の支持構造を説明する縦断背面図
【図7】可動飛散防止カバーの構造を説明する縦断側面図
【図8】刈刃の構造を説明する横断平面図
【図9】歩行型草刈機の伝動系統図
【図10】歩行型草刈機の伝動構造を示す縦断背面図
【図11】歩行型草刈機の伝動構造を示す横断平面図
【図12】刈刃クラッチの斜視図
【図13】前進させた場合における刈刃の傾斜状況を説明する概略右側面図
【図14】後進させた場合における刈刃の傾斜状況を説明する概略右側面図
【発明を実施するための形態】
【0021】
〔歩行型草刈機の全体構成〕
図1〜図6に基づいて、歩行型草刈機の全体構成について説明する。図1及び図2は、歩行型草刈機の全体左側面図及び全体平面図をそれぞれ示し、図3〜図5は、走行機体1の縦断左側面図、横断平面図及び縦断背面図をそれぞれ示す。図6は、前輪5及び後輪6の支持構造を説明する縦断背面図を示す。
【0022】
図1及び図2に示すように、走行機体1に装備された機体フレーム2に前部車軸3及び後部車軸4が枢支されており、この前部車軸3及び後部車軸4の左右両端部のそれぞれに板金製の前輪5,5及び後輪6,6(走行装置に相当)が固定されている。機体フレーム2の上部に伝動ケース7が左右向きの軸心P1周りに揺動自在に支持されており、この伝動ケース7の上部に、燃料タンク8aが一体的に構成されたエンジン8が連動連結されて、原動部Eが構成されている。エンジン8には、リコイル式のスタータ8bが装備されており、このスタータ8bによりエンジン8を駆動できるように構成されている。
【0023】
走行機体1の右側部にはチェーン伝動機構9が配設されており、エンジン8からの動力が伝動ケース7内の伝達経路を介してチェーン伝動機構9に伝達されて前部車軸3及び後部車軸4が回転し、左右の前輪5及び後輪6が回転するように構成されている。伝動ケース7の下部には刈刃10が装着されており、エンジン8からの動力が伝動ケース7内の伝達経路を介して刈刃10に伝達されて刈刃10が回転し、草を刈り取ることができるように構成されている。
【0024】
図4及び図5に示すように、機体フレーム2の上部には、平面視でU字状のフレーム18が固定されており、このフレーム18の機体フレーム2から左方側に延出された端部に、支軸19が上下向きの軸心周りに回動自在に支持されている。支軸19の上端部には、横向きの軸心周りでブラケット20が回動自在に支持されており、このブラケット20にパイプ状の操縦ハンドル21が固定されている。
【0025】
図1及び図2に示すように、操縦ハンドル21は、上下向きの軸心周りに揺動変位可能で、かつ、フレーム18との間に備えた第1ロック機構22の作用で、予め設定した上下向きの軸心周りの複数の揺動位置に選択的に固定保持できるように構成されており、横向きの軸心周りに揺動変位可能で、かつ、フレーム18との間に備えた第2ロック機構23の作用で、予め設定した横向きの軸心周りの複数の揺動位置に選択的に固定保持できるように構成されている。
【0026】
操縦ハンドル21の延出端部には、握り部21aが装備されており、この握り部21aに、ロック状態にバネ付勢された第1ロック機構22のロック解除操作を可能にする第1解除レバー24、及びロック状態にバネ付勢された第2ロック機構23のロック解除操作を可能にする第2解除レバー25が取り付けられて、第1及び第2ロック機構22,23とそれぞれ連係されている。
【0027】
操縦ハンドル21の延出端部には、主クラッチレバー21bが横向きの軸心周りで上下に揺動操作可能に装備されており、後述する主クラッチ63と連係されて、刈刃10の回転の停止、及び走行機体1の停止ができるように構成されている。
【0028】
操縦ハンドル21の後端部には、前進位置、中立位置及び後進位置に切換可能な前後進切換レバー26が上下向きの軸心周りに左右に揺動可能に支持されており、この前後進切換レバー26に後述する操作アーム85が連係されて、前後進切換レバー26の操作により歩行型草刈機の前進、停止(中立)、後進の切換ができるように構成されている。
【0029】
図3,図4,図6に示すように、機体フレーム2は、前後に長い右及び左のメインフレーム31,32と、右及び左のメインフレーム31,32の前端部に亘って設けられた前部フレーム33と、右及び左のメインフレーム31,32の後端部に亘って設けられた後部フレーム34とを備えて構成されている。
【0030】
前部及び後部フレーム33,34は、円筒状の部材により構成されており、前部フレーム33に、左右の軸受部材37を介して左右向きの前部車軸3が回動自在に内嵌され、後部フレーム34に、左右の軸受部材38を介して左右向きの後部車軸4が回動自在に内嵌されている。
【0031】
右及び左のメインフレーム31,32の前端部に亘って走行機体1の前部を保護する前部ロッド35が装着され、右及び左のメインフレーム31,32後端部に亘って走行機体1の後部を保護する後部ロッド36が装着されている。
【0032】
図3〜図5に示すように、伝動ケース7から右方に駆動軸7aが延出されており、この駆動軸7aが右のメインフレーム31に軸受部材39を介して回動自在に支持されている。伝動ケース7から左方に駆動軸7aと同心状の揺動支軸7bが延出されており、この揺動支軸7bが左のメインフレーム32に軸受部材40を介して左右向きの軸心P1周りに回動自在に支持されている。これにより、伝動ケース7、伝動ケース7に装着されたエンジン8、及び刈刃10等を左右向きの軸心P1周りで機体フレーム2に一体で前後揺動可能に支持することができる。
【0033】
駆動軸7a及び揺動支軸7bの左右向きの軸心P1の側面視での前後方向の位置は、駆動軸7a及び揺動支軸7bによって支持される伝動ケース7、エンジン8及び刈刃10等の前後方向での重心位置の近傍に位置するように配設されており、駆動軸7aを停止させて伝動ケース7等に慣性力が働いていない状態では、刈刃10が地面と略水平な状態に維持され、駆動軸7aを回転させて伝動ケース7等に慣性力が作用する状態では、伝動ケース7等の自重による軸心P1周りの力より駆動軸7aを回転させることによる慣性力の方が大きくなって、刈刃10が前下がり傾斜姿勢及び後下がり傾斜姿勢に姿勢変更されるように構成されている(図13及び図14参照)。
【0034】
図3〜図6に示すように、右のメインフレーム31の右外側には、チェーン伝動機構9が装備されている。チェーン伝動機構9は、駆動軸7aの右外端部に連動連結された駆動スプロケット41と、前部車軸3の右外端部に連動連結された前部スプロケット42と、後部車軸4の右外端部に連動連結された後部スプロケット43と、駆動スプロケット41の上部に配設されたテンションスプロケット44と、駆動スプロケット41、前部及び後部スプロケット42,43、及びテンションスプロケット44に亘って巻回張設された伝動チェーン45とを備えて構成されている。
【0035】
右のメインフレーム31の右側面には、左右に2分割されたチェーンカバー46が装備されており、左のチェーンカバー46aを右のメインフレーム31に固定し、この左のチェーンカバー46aに右外方側から右のチェーンカバー46bを締め付け固定することで、チェーン伝動機構9をチェーンカバー46によって覆うことができるように構成されている。
【0036】
左のチェーンカバー46aの前後中央部の上部には、テンションスプロケット44が左右向きの軸心周りで回動自在に支持されている。テンションスプロケット44は、左のチェーンカバー46aに上下方向に位置変更可能に取り付けられており、テンションスプロケット44を上下に位置調節することで、伝動チェーン45の張り具合を調節できるように構成されている。
【0037】
右のチェーンカバー46bの前後中央部には、右外方からカバー50が着脱可能に取り付けられており、このカバー50を取り外すことで、チェーンカバー46内の点検ができるように構成されている。
【0038】
前部車軸3及び後部車軸4の左右両端部には、横外方側から左右の前輪5,5及び後輪6,6が外嵌挿入されて、前部車軸3及び後部車軸4と一体回動可能に固定されている。エンジン8からの動力が伝動ケース7を介して駆動軸7aに伝達されてチェーン伝動機構9を介して前部車軸3及び後部車軸4が回転すると、前輪5及び後輪6が回転し歩行型草刈機が前進又は後進するように構成されている。
【0039】
上記のように、走行機体1の機体フレーム2に、伝動ケース7から延出した駆動軸7a及び揺動支軸7bを左右方向の軸心P1周りに揺動可能に支持し、エンジン8からの動力を伝動ケース7を介して駆動軸7aに伝達し、駆動軸7aからの動力によりチェーン伝動機構9を介して前輪5及び後輪6を回転させることにより、走行機体1を前進させると刈刃10の前側が下方に揺動した前下がり傾斜姿勢に姿勢変更され、走行機体1を後進させると刈刃10の後側が下方に揺動した後下がり傾斜姿勢に姿勢変更される傾斜姿勢変更機構が構成されている(図13及び図14参照)。
【0040】
〔カバーの詳細構造〕
図4〜図7に基づいて、走行機体1に装着されているカバーの詳細構造について説明する。図7は、可動飛散防止カバー54の構造を説明する機体内側から見た縦断側面図を示す。
【0041】
図4及び図5に示すように、右及び左のメインフレーム31,32の前後中央部下面側に、左右の上側カバー51が固定されており、この左右の上側カバー51に左右の固定飛散防止カバー52が固定されている。左の固定飛散防止カバー52の下端と地面との間の隙間は、右の飛散防止カバー52の下端と地面との間の隙間より広く設定されており、左の飛散防止カバー52は、後述する可動飛散防止カバー54との協働で、刈草の左側への飛散を防止できるように構成されている。
【0042】
図5及び図7に示すように、フレーム18から下方に、前後のブラケット53が延出されており、この前後のブラケット53に可動飛散防止カバー54が装着されている。可動飛散防止カバー54には、上下に長い前後の長穴54Aが形成されており、この前後の長穴54Aに前後のブラケット53から左側方に延出された前後のピン53Aが連通されている。可動飛散防止カバー54の上部には、内方側に突出したバネ取付部54aが設けられており、このバネ取付部54aと前後のブラケット53とに亘って弾性バネ55が装着されている。
【0043】
可動飛散防止カバー54の前端部下部には、側面視で前方上方に切り欠かれた前部傾斜部54bが形成されており、可動飛散防止カバー54の後端部下部には、側面視で後方上方に切り欠かれた後部傾斜部54cが形成されている。これにより、例えば歩行型草刈機を前進させて左側前方からの石等の障害物が可動飛散防止カバー54に接当すると、可動飛散防止カバー54に形成した長穴54Aにより弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方へ移動する。逆に、歩行型草刈機を後進させて左側後方から石等の障害物が可動飛散防止カバー54に接当すると、可動飛散防止カバー54に形成した長穴54Aにより弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方に移動する。
【0044】
図4及び図5に示すように、可動飛散防止カバー54の前部及び後部は、左の前輪5及び後輪6の外面に沿うように配設され、前端部及び後端部がそれぞれ内方側に折り曲げられた形状に成形されて、この内方側に折り曲げられた前端部及び後端部が平面視で前輪5及び後輪6と重なるように配設されている。また、可動飛散防止カバー54の下端と地面との間の隙間は、右の固定飛散防止カバー52の下端と地面との間の隙間と略同じに設定されている。これにより、可動飛散防止カバー54の下端と地面との間の隙間、及び可動飛散防止カバー54と前輪5及び後輪6との隙間を小さく設定でき、刈草の左側方への飛散を効果的に防止できる。
【0045】
上記のように可動飛散防止カバー54を構成することにより、通常時には、弾性バネ55の付勢力により可動飛散防止カバー54を下方側に付勢して前輪5と後輪6との間を広く可動飛散防止カバー54によって側方から覆うことができ、障害物に接当した時には、弾性バネ55の付勢力に抗して可動飛散防止カバー54が上方へ移動して可動飛散防止カバー54の破損を防止できる。なお、走行機体1の右側に可動飛散防止カバー54を設けてもよく、走行機体1の左右両側に可動飛散防止カバー54を設けてもよい。
【0046】
図3及び図6に示すように、右及び左のメインフレーム31,32に亘って設けられた前部フレーム33には、左右の前輪5の間を覆うゴム製の前部飛散防止部材56が左右方向の軸心周りで前後に揺動可能に装着されており、右及び左のメインフレーム31,32に亘って設けられた後部フレーム34には、左右の後輪6の間を覆うゴム製の後部飛散防止部材57が左右方向の軸心周りで前後に揺動可能に装着されている。前部及び後部飛散防止カバー56,57の左右両端部は、それぞれ前輪5及び後輪6の内側に入り込むような形状に成形されており、これにより、刈草の前方及び後方への飛散を効果的に防止できる。
【0047】
図4及び図6に示すように、機体フレーム2は、前後に2分割された前後の上部カバー58によって上方から覆われている。前後の上部カバー58の中央部は上方へ膨出した形状に成形され、外周部が水平な形状に成形されており、前後の上部カバー58の水平な形状に成形された左右両側部が右及び左のメインフレーム31,32の上面側の複数箇所に締め付け固定されている。
【0048】
〔刈刃の詳細構造〕
図5及び図8に基づいて、刈刃10の詳細構造について説明する。図8は、刈刃10の構造を説明する横断平面図を示す。
【0049】
図5及び図8に示すように、刈刃10は、伝動ケース7の下部に刈刃10を装着するボス部材11と、このボス部材11に固着された回転円板12と、回転円板12に外周部に回動自在に支持された複数の刈刃体13と、回転円板12の上面側に固定された複数の拡散羽根14とを備えて構成されている。
【0050】
回転円板12は、ボス部材11との固定部から外方側に徐々に地面との間の距離が狭くなるように外方下方へ傾斜した下向きの皿状に成形され、外周部に地面と略水平な水平部12aが形成されている。刈刃体13は、斜め外方側上方に傾斜する形状に成形された上側刈刃体13aと、斜め外方側下方に傾斜する形状に成形された下側刈刃体13bとによって構成されており、回転円板12の外周部の水平部12aの複数箇所に、上側刈刃体13aと下側刈刃体13bとが交互に、約90度の等ピッチでピン15により回動自在に支持されている。
【0051】
拡散羽根14は、外方側に向かうに従って徐々に羽根の面積が広くなるように、その上端部が斜め外方上方に傾斜する形状に成形されており、軸心P2から互いに隣接する刈刃体13の中間位置を、放射状に約90度の等ピッチで配設されている。
【0052】
伝動ケース7の下部には、刈刃カバー16が装着されており、この刈刃カバー16により、刈草の回転中心側への入り込みが阻止されて、回転中心での刈草の巻き付きを防止できるように構成されている。
【0053】
〔歩行型草刈機の伝動構造〕
図9〜図12に基づいて、歩行型草刈機の伝動構造について説明する。図9は、歩行型草刈機の伝動系統図を示し、図10及び図11は、歩行型草刈機の伝動構造の縦断背面図及び横断平面図をそれぞれ示す。また、図12は、刈刃クラッチ68の斜視図を示す。
【0054】
図9〜図11に示すように、伝動ケース7の上部に一対のベアリング61を介して上下向き入力軸62が回動自在に支持されており、この入力軸62の上端部が伝動ケース7の上部に固定されたエンジン8の出力軸8cに主クラッチ63を介して連結されている。入力軸62の下部に、伝動ギア64が一体回動可能に連結されており、この伝動ギア64が後述する上部伝動軸65に連動連結された伝動ギア72に咬合されている。
【0055】
伝動ケース7の上下向きの軸心P2周りに同心状に配設された上部伝動軸65及び下部伝動軸66が複数のベアリング67を介して回動自在に支持されており、上部伝動軸65と下部伝動軸66とに亘って刈刃クラッチ68が装着されている。下部伝動軸66の下端部には、刈刃10のボス部材11が下方側から締め付け固定されており、刈刃クラッチ68を入り側に操作すると、エンジン8からの動力が入力軸62、上部伝動軸65、及び刈刃クラッチ68を介して下部伝動軸66に伝達されて刈刃10が回転するように構成されている。
【0056】
図10及び図12に示すように、刈刃クラッチ68は、上部伝動軸65に連動連結された上部クラッチ69と、下部伝動軸66に一体回動可能でかつスプライン構造により上下にスライド移動可能に外嵌された下部クラッチ70とを備えて構成されており、上部クラッチ69及び下部クラッチ70には、互いに係合する係合片69a,70aがそれぞれ形
成されている。
【0057】
下部クラッチ70の下面側とベアリング67の上面側とに亘って下部クラッチ70を上方に付勢する弾性バネ68aが装着されており、この弾性バネ68aにより刈刃クラッチ68が入り側に付勢されるように構成されている。
【0058】
係合片69a,70aには、斜めに傾斜した傾斜部69b,70bが形成されており、エンジン8からの動力が上部伝動軸65を介して下部伝動軸66に伝達される状態では、上部クラッチ69の係合片69aと下部クラッチ70の係合片70aとが噛み合ってエンジン8からの動力が下部伝動軸66に伝達される。
【0059】
例えば、エンジン8を停止させて上部伝動軸65の回転が停止した状態で、刈刃10が慣性力により回転して、刈刃10からの慣性力が下部伝動軸66から上部伝動軸65に伝達されようとすると、係合片69a,70aの傾斜部69b,70bにより上部クラッチ69に対して下部クラッチ70が相対回転して滑り、下部伝動軸66からの慣性力の上部伝動軸65への伝達が遮断される。刈刃10の慣性力による回転が止まると、弾性バネ68aの付勢力により下部クラッチ70が上方へ操作され、刈刃クラッチ68が入り側に操作される。
【0060】
これにより、刈刃10の慣性力の伝動上流側(エンジン8側及び駆動軸7b側)への連れ回り(例えば刈刃10の慣性力により前輪5及び後輪6が動くこと等)を防止できると共に、例えば刈刃10の回転を強制的に制動するブレーキ装置等(図示せず)を刈刃10の伝動上流側(例えば上部伝動軸65又は下部伝動軸66等)に装備して、エンジン8を停止させた際の刈刃10の回転による慣性力が伝動上流側に伝達されないように構成する場合に比べ、刈刃10からの慣性力の伝動上流側への伝達を抑制する機構を簡素化することができ、製造コストを削減できる。
【0061】
下部クラッチ70は、刈刃クラッチ68のシフト部材としても機能するように、下部クラッチ70の下部の外周部にシフト溝70cが形成されており、このシフト溝70cに、前後向きの軸心周りで左右に揺動可能に支持されたシフトレバー71の操作部71aが係合されて、シフトレバー71のレバー本体71bを揺動操作すると下部クラッチ70が上下にスライド移動して刈刃クラッチ68の断接ができるように構成されている。
【0062】
図9〜図11に示すように、上部伝動軸65には、伝動ギア72,73が連動連結され
ており、伝動ギア72が入力軸62に固定された伝動ギア64に咬合されている。伝動ケース7に回動自在に支持された前後向きの伝動軸74に伝動ギア75が連動連結されており、この伝動ギア75が上部伝動軸65に連動連結された伝動ギア73に咬合されて、上下向きの上部伝動軸65からの動力が90度角度変更されて前後向きの伝動軸74に伝達されるように構成されている。伝動軸74には、伝動ギア76が連動連結されており、この伝動ギア76が伝動軸74の右下側に配設され伝動軸77に連動連結された伝動ギア78に咬合されている。
【0063】
伝動軸77には、ベベルギア79が連動連結されており、このベベルギア79が左右向きの駆動軸7aに外嵌された前進用ベベルギア80及び後進用ベベルギア81に咬合されている。駆動軸7aは、伝動ケース7にベアリング83を介して左右向きの軸心P1周りに回動自在に支持されており、この駆動軸7aに、前進用及び後進用ベベルギア80,81が回動自在に外嵌され、前進用ベベルギア80と後進用ベベルギア81との間にシフト部材82が左右方向にスライド移動可能でかつ駆動軸7aと一体回動可能に外嵌されている。
【0064】
伝動ケース7には、操作軸84が上下向きの軸心周りに回動自在に支持されており、この操作軸84の上端部及び下端部に操作アーム85及び上下の操作部材86が連結されている。シフト部材82の外周部には、シフト溝82aが形成されており、このシフト溝82aに操作軸84に連結された操作部材86が係合されている。操作アーム85を前後に揺動操作するとシフト部材82が左右方向にスライド移動して前進用ベベルギア80又は後進用ベベルギア81に噛み合い、走行機体1の前進、停止(中立)及び後進の切換ができるように構成されている。このように、ベベルギア79、前進用ベベルギア80、後進用ベベルギア、シフト部材82等により、前後進クラッチ87が構成されている。
【0065】
図1及び図2に示すように、操作アーム85は、操縦ハンドル21に装備された前後進切換レバー26に連係されており、前後進切換レバー26を前進側(左側)に揺動操作すると、操作アーム85が後方に揺動操作されてシフト部材82が前進用ベベルギア80に咬合し前後進クラッチ87が前進側に入り操作され、ベベルギア79からの動力が前進用ベベルギア80及びシフト部材82を介して駆動軸7aに伝達されて、駆動軸7aが正回転駆動する。一方、前後進切換レバー21を後進側(右側)に揺動操作すると、操作アーム85が前方に揺動操作されてシフト部材82が後進用ベベルギア81に咬合し前後進クラッチ87が後進側に入り操作され、ベベルギア79からの動力が後進用ベベルギア81及びシフト部材82を介して駆動軸7aに伝達されて、駆動軸7aが逆回転駆動する。
【0066】
図9〜図11に示すように、駆動軸7aの右端部には、チェーン伝動機構9の駆動スプロケット41が連動連結されており、駆動軸7aからの動力がチェーン伝動機構9を介して前部車軸3及び後部車軸4に伝達されて、前輪5及び後輪6が正逆転し、走行機体1が前進又は後進する。
【0067】
〔刈高さ調節機構の詳細構造〕
図3及び図4に基づいて、刈高さ調節機構90(傾斜角度調節機構に相当)の詳細構造について説明する。図3及び図4に示すように、左のメインフレーム32の後部上面側に締め付け固定されたブラケット91と、伝動ケース7の左側部に締め付け固定された板状のブラケット92とに亘って連係ロッド93を連係することで、刈高さの下限範囲を規制する刈高さ調節機構90が構成されている。
【0068】
ブラケット91は、板材をL字状に折り曲げ成形して構成されており、左のメインフレーム32との固定部分から上方に延出された部分に3つの調節穴91A,91B,91Cが加工されている。上側の調節穴91Aは、丸穴に成形されており、中央の調節穴91B及び下側の調節穴91Cは、それぞれ前後に長い長穴に成形されている。後述する刈高さH1,H2,H3が略等しい間隔で高くなるように、調節穴91B,91Cの長穴の長さが徐々に長くなるように設定されている。
【0069】
連係ロッド93の前端部及び後端部は、それぞれ内方側及び外方側に折り曲げられた形状に成形されており、連係ロッド93の前端部をブラケット92上部の左右向きの貫通穴に連係し、連係ロッド93の後端部をブラケット91の調節穴91A,91B,91Cのいずれか一つにピン94で連係することで、左右向きの軸心P1周りでの伝動ケース7等の揺動範囲の上限を規制できるように構成されている。
【0070】
連係ロッド93の後端部を調節穴91Aに連係すると、左右向きの軸心P1周りでの伝動ケース7の揺動が規制されて、エンジン8を駆動して刈刃10を回転させたとしても、刈刃10の下端部の高さはH1のままで変化しない。
【0071】
連係ロッド93の後端部を調節穴91Bに連係すると、連係ロッド93の後端部の移動が調節穴91Bの長穴の範囲で許容され、左右向きの軸心P1周りでの伝動ケース7等の前方及び後方への揺動が調節穴91Bの長穴の範囲で許容される。例えばエンジン8を駆動させて前後進切換レバー26を前進側に操作すると、伝動ケース7の下端部に連結された刈刃10が、地面と略水平な高さH1から調節穴91Bで許容された範囲で傾斜する。そして、連係ロッド93の後端部が調節穴91Bの先端に接当して、刈刃10の下端部の高さが自動的に高さH2に変更されて、その高さH2が維持される。
【0072】
連係ロッド93の後端部を調節穴91Cに連係すると、連係ロッド93の後端部の移動が調節穴91Cの長穴の範囲で許容され、左右向きの軸心P1周りでの伝動ケース7等の前方及び後方への揺動が調節穴91Cの長穴の範囲で許容される。例えばエンジン8を駆動させて前後進切換レバー26を前進側に操作すると、伝動ケース7の下端部に連結された刈刃10が、地面と略水平な高さH1から調節穴91Cで許容された範囲で傾斜する。そして、連係ロッド93の後端部が調節穴91Cの先端に接当して、刈刃10の下端部の高さが自動的に高さH3に変更されて、その高さH3が維持される。
【0073】
なお、エンジン8を停止させるか、又は前後進切換レバー26を停止側(中立側)に操作すると、刈刃10の高さが自動的に地面と略水平な高さH1に変更される。
【0074】
以上のように刈高さ調節機構90を構成することにより、ピン94を脱着して連係ロッド93の後端部の調節穴91A,91B,91Cへの連係位置を変更することで、伝動ケース7の揺動範囲を変更して、刈刃10の下端部の高さをH1,H2,H3の3段階で変更調節することができ、刈刃10による刈高さ(後述する刈刃10の前下がり傾斜角度α(後下がり傾斜角度α))を3段階で変更調節できる。
【0075】
〔刈刃の傾斜状況の説明〕
図13及び図14に基づいて,刈刃10の傾斜状況について説明する。図13は、走行機体1を前進させた前下がり傾斜姿勢での刈刃10の傾斜状況を示し、図14は、走行機体1を後進させた後下がり傾斜姿勢での刈刃10の傾斜状況を示す。
【0076】
図13に示すように、刈刃10が回転していない地面と略水平になった状態から、エンジン8を駆動させて前後進切換レバー26を前進側に切り換えると、駆動軸7aが左右向きの軸心P1周りに図13の黒矢印で示す時計回りに回転する。駆動軸7aが時計回りに回転すると、力の作用反作用の法則により、図13の黒矢印で示す駆動軸7aが回転する方向とは逆の反時計回りの方向の力が伝動ケース7に作用する。伝動ケース7に反時計回りの力が作用すると、伝動ケース7、伝動ケース7に連結されたエンジン8、及び刈刃10が一体で左右向きの軸心P1周りで前方へ揺動し、刈高さ調節機構90により揺動範囲が規制され(図13では、刈高さをH3に設定した場合)、伝動ケース7、エンジン8及び刈刃10が水平時よりも角度α前下がり傾斜した状態になる。
【0077】
一方、図14に示すように、刈刃10が回転していない地面と略水平になった状態から、エンジン8を駆動させて前後進切換レバー26を後進側に切り換えると、駆動軸7aが左右向きの軸心P1周りに図14の黒矢印で示す反時計回りに回転する。駆動軸7aが反時計回りに回転すると、力の作用反作用の法則により、図14の黒矢印で示す駆動軸7aが回転する方向とは逆の時計回りの方向の力が伝動ケース7に作用する。伝動ケース7に時計回りの力が作用すると、伝動ケース7、並びに伝動ケース7に連結されたエンジン8及び刈刃10が一体で左右向きの軸心P1周りで後方へ揺動し、刈高さ調節機構90により揺動範囲が規制されて(図14では、刈高さをH3に設定した場合)、伝動ケース7、エンジン8及び刈刃10が水平時よりも角度α後下がり傾斜した状態になる。
【0078】
すなわち、エンジン8を駆動させて前後進切替レバー26を前進側又は後進側に切り替え、走行機体1を前進又は後進させると、自動的に刈高さ調節機構90により設定した刈高さに刈刃10が自動的に揺動し、予め刈高さ調節機構90により設定された刈刃10の刈高さで刈取作業を行うことができる。
【0079】
上記のように、刈刃10を前下がり傾斜又は後下がり傾斜させて草を刈り取ることにより、刈刃10の前下がり傾斜又は後下がり傾斜させた下端部(前端部又は後端部)が最も草(地面)に近い位置になり、その位置から走行方向に対しての逆方向に向かうに従って、刈刃10と刈刃10の下側を通過する草(地面)との間の隙間が徐々に広くなる。その結果、刈刃10の下面側と刈刃10の下側を通過する草(地面)との接触面積が小さくなり、刈刃10の下面側に作用する刈り取った草(地面)からの抵抗が小さくなって、草を刈り取る際における刈刃10に作用する負荷を軽減することができる。
【0080】
その結果、例えば刈刃10が地面と略水平な状態で草を刈り取るように構成する場合に比べ、刈刃10を回転駆動させる動力(草を刈り取る動力)が小さくなって、エンジン8の小型化及び軽量化を実現でき(例えば草を刈り取る能力を確保しながら馬力の小さいエンジンに設定することができ)、歩行型草刈機のコンパクト化及び軽量化を実現できる。
【0081】
[発明の実施の第1別形態]
前述の[発明を実施するための最良の形態]においては、走行機体1の伝動ケース7から延出した駆動軸7a及び揺動支軸7bを左右方向の軸心P1周りに揺動可能に支持して、刈刃10を前下がり傾斜姿勢及び後下がり傾斜姿勢に姿勢変更するように、傾斜姿勢変更機構を構成した例を示したが、走行機体1に刈刃10を左右軸心周りに揺動可能に支持するのであれば、異なる構成を採用してもよい。
【0082】
具体的には、例えば伝動ケース7の下部に刈刃10を左右軸心周りに揺動可能に支持する構成(図示せず)を採用してもよく、エンジン8及び伝動ケース7とは別に、刈刃10を機体フレーム2に左右軸心周りに揺動可能に支持する構成(図示せず)を採用してもよい。
【0083】
[発明の実施の第2別形態]
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、駆動軸7aからの動力を、チェーン伝動機構9を介して前輪5及び後輪6に伝達するように構成した例を示したが、駆動軸7aからの動力を異なる伝動機構を介して前輪5及び後輪6に伝達するように構成してもよく、例えばVベルトやタイミングベルト等のベルト伝動機構(図示せず)を採用してもよく、ドライブシャフト(図示せず)を採用してもよい。
【0084】
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、ブラケット91とブラケット92とに亘って連係ロッド93を連係することで刈高さ調節機構90を構成した例を示したが、刈高さ調節機構90として異なる機構を採用してもよく、例えば機体フレーム2側に、揺動するエンジン8又は伝動ケース7の揺動範囲の上限を規制する規制具(図示せず)を設けるように、刈高さ調節機構90を構成してもよい。
【0085】
前述の[発明を実施するための最良の形態]及び[発明の実施の第1別形態]においては、刈刃10による刈高さを3段階で変更調節できるように、刈高さ調節機構90を構成した例を示したが、刈刃10による刈高さを異なる段階(例えば2段階のように少ない段階、又は4段階,5段階等のように多い段階)で変更調節できるように、刈高さ調節機構90を構成してもよい。また、刈刃10による刈高さを段階的に変更調節するのではなく、無段階で変更調節できるように、刈高さ調節機構90を構成してもよく、このように構成することで、刈刃10による刈高さの微調節を行うことができ、刈取作業の作業性を更に向上できる。
【0086】
具体的には、例えば、揺動しない機体フレーム2側に、揺動するエンジン8又は伝動ケース7の揺動範囲の上限を規制する規制具(図示せず)を設け、この規制具を調節することによりエンジン8又は伝動ケース7の揺動範囲の上限を無段階で規制するように、刈高さ調節機構90を構成する。
【0087】
[発明の実施の第3別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]における刈刃10に代えて、バーブレード(図示せず)を採用してもよい。
【0088】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、走行装置として前輪5及び後輪6を採用した例を示したが、前輪5及び後輪6に代えて、車輪を3点配置した3輪走行仕様(図示せず)や、クローラ走行装置(図示せず)を採用してもよい。
【0089】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、エンジン8からの動力で前輪5及び後輪6を駆動するように構成した例を示したが、前輪5又は後輪6を遊転輪とし、エンジン8からの動力で前輪5又は後輪6が駆動するように、歩行型草刈機を構成してもよい。
【0090】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、原動部Eとしてエンジン8を採用した草刈機を例に示したが、原動部Eとして異なる構成を採用してもよく、例えばエンジン8に代えてバッテリーや商用電源等の電力により駆動する電動モータ(図示せず)を採用してもよい。
【0091】
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]及び[発明の実施の第2別形態]においては、伝動ケース7の上部にエンジン8を連動連結して原動部Eを構成した例に示したが、伝動ケース7とエンジン8とを一体構成した原動部E(図示せず)を採用してもよい。また、簡易には、伝動ケース7を省略して原動部Eをエンジン8のみで構成してもよい(図示せず)。この場合、エンジン8から走行装置(車輪等)への左右向きの駆動軸及び揺動支軸を延出し、エンジン8の下部から刈刃10への下向きの伝動軸を延出して、エンジン8を機体フレーム2に左右軸心周りに揺動可能に支持する(図示せず)。
【符号の説明】
【0092】
1 走行機体
5 前輪(走行装置)
6 後輪(走行装置)
7a 駆動軸
7b 揺動支軸
10 刈刃
90 刈高さ調節機構(傾斜角度調節機構)
E 原動部
P1 軸心(左右軸心)
P2 軸心(上下軸心)
α 前下がり傾斜角度,後下がり傾斜角度
【特許請求の範囲】
【請求項1】
走行機体に、原動部と、前記原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機において、
前記走行装置は前記走行機体に支持される左右の前輪及び左右の後輪を有し、
前記原動部の下部に前記刈刃を上下軸心周りに回動自在に支持し、前記走行機体に前記原動部及び刈刃を左右軸心周りに揺動可能に支持して、
前記刈刃の前側が下方に揺動した前下がり傾斜姿勢、及び、前記刈刃の後側が下方に揺動した後下がり傾斜姿勢に、前記原動部及び刈刃を姿勢変更する傾斜姿勢変更機構を備え、
前記左右軸心が、側面視で前記左右の前輪に亘って連結された前部車軸と前記左右の後輪に亘って連結された後部車軸との間に位置し、且つ、側面視で前記前部車軸と前記後部車軸とに亘る仮想直線よりも上方に位置して、前記左右の前輪及び左右の後輪が接地面に接地した状態において、前記刈刃が、前記接地面に接地することなく、前記原動部及び刈刃が前記走行機体に支持されている歩行型草刈機。
【請求項2】
駆動軸と前記前部車軸及び前記後部車軸とに亘ってチェーン伝動機構を前後向きに配置して、前記駆動軸の動力を前記前部車軸及び後部車軸に伝達するように構成し、
前記チェーン伝動機構を覆うチェーンカバーを備え、
前記チェーンカバーにおける前記前部車軸及び後部車軸の部分よりも、前記チェーンカバーにおける前記左右軸心の部分が高くなるように、前記チェーンカバーが屈曲している請求項1に記載の前記歩行型草刈機。
【請求項3】
前記原動部の左右一方の側部から前記駆動軸を延出して、前記駆動軸が前記左右軸心周りで前記走行機体に揺動可能に支持されている請求項2に記載の歩行型草刈機。
【請求項4】
前記走行機体に操縦ハンドルが備えられている請求項1〜3の何れか一項に記載の歩行型草刈機。
【請求項1】
走行機体に、原動部と、前記原動部からの動力により回動する走行装置及び刈刃とを備えてある歩行型草刈機において、
前記走行装置は前記走行機体に支持される左右の前輪及び左右の後輪を有し、
前記原動部の下部に前記刈刃を上下軸心周りに回動自在に支持し、前記走行機体に前記原動部及び刈刃を左右軸心周りに揺動可能に支持して、
前記刈刃の前側が下方に揺動した前下がり傾斜姿勢、及び、前記刈刃の後側が下方に揺動した後下がり傾斜姿勢に、前記原動部及び刈刃を姿勢変更する傾斜姿勢変更機構を備え、
前記左右軸心が、側面視で前記左右の前輪に亘って連結された前部車軸と前記左右の後輪に亘って連結された後部車軸との間に位置し、且つ、側面視で前記前部車軸と前記後部車軸とに亘る仮想直線よりも上方に位置して、前記左右の前輪及び左右の後輪が接地面に接地した状態において、前記刈刃が、前記接地面に接地することなく、前記原動部及び刈刃が前記走行機体に支持されている歩行型草刈機。
【請求項2】
駆動軸と前記前部車軸及び前記後部車軸とに亘ってチェーン伝動機構を前後向きに配置して、前記駆動軸の動力を前記前部車軸及び後部車軸に伝達するように構成し、
前記チェーン伝動機構を覆うチェーンカバーを備え、
前記チェーンカバーにおける前記前部車軸及び後部車軸の部分よりも、前記チェーンカバーにおける前記左右軸心の部分が高くなるように、前記チェーンカバーが屈曲している請求項1に記載の前記歩行型草刈機。
【請求項3】
前記原動部の左右一方の側部から前記駆動軸を延出して、前記駆動軸が前記左右軸心周りで前記走行機体に揺動可能に支持されている請求項2に記載の歩行型草刈機。
【請求項4】
前記走行機体に操縦ハンドルが備えられている請求項1〜3の何れか一項に記載の歩行型草刈機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−66487(P2013−66487A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−273920(P2012−273920)
【出願日】平成24年12月14日(2012.12.14)
【分割の表示】特願2012−52205(P2012−52205)の分割
【原出願日】平成19年8月6日(2007.8.6)
【出願人】(000001052)株式会社クボタ (4,415)
【出願人】(599118768)株式会社斎藤農機製作所 (47)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成24年12月14日(2012.12.14)
【分割の表示】特願2012−52205(P2012−52205)の分割
【原出願日】平成19年8月6日(2007.8.6)
【出願人】(000001052)株式会社クボタ (4,415)
【出願人】(599118768)株式会社斎藤農機製作所 (47)
【Fターム(参考)】
[ Back to top ]