
歩行型野菜苗植付機
【課題】簡易なレバー操作により、畝との干渉を生じることなく、機体の旋回が可能となる歩行型野菜苗植付機を提供する。
【解決手段】歩行型野菜苗植付機は、左右の駆動輪(2)と、機体旋回を可能とする変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行可能に構成され、上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了した後に変速伝動機構(11)が旋回伝動をする制御処理を構成したしたものである。
【解決手段】歩行型野菜苗植付機は、左右の駆動輪(2)と、機体旋回を可能とする変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行可能に構成され、上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了した後に変速伝動機構(11)が旋回伝動をする制御処理を構成したしたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、畝を跨いで野菜苗を植付け走行する歩行型野菜苗植付機に関するものである。
【背景技術】
【0002】
特許文献1に示すように、歩行型田植機は、左右の駆動輪で支持した機体に苗植付装置を備えるともに、左右のサイドクラッチ、機体リフト機構、機体後端部にハンドル等を備えて構成される。左右の駆動輪は機体を走行駆動し、左右のサイドクラッチは、左右の駆動輪の駆動力を個々に断接し、機体リフト機構は油圧シリンダの伸縮動作により左右の駆動輪に対して機体の支持高さ位置を調節し、ハンドルは左右の駆動輪を支点として機体後部の押し下げ操作を可能とする。また、ハンドルには左右のクラッチレバーを備えて左右のサイドクラッチおよび機体リフト機構と連結して構成される。
【0003】
上記歩行型田植機は、機体旋回の際は、左右のクラッチレバーの一方を操作することにより、操作側のサイドクラッチが切れて機体が旋回動作するとともに機体の上昇によって苗植付装置が水面上に待避することから、苗の植付け作業の際の圃場端における機体旋回動作を簡易に行うことができる。
【特許文献1】特開平6−7008号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、畝を跨いで野菜苗を植付け走行する歩行型野菜苗植付機に上記構成を適用した場合は、機体が畝の高さを超えて上昇するまで油圧シリンダの動作に時間を要することから、その間にサイドクラッチの切断によって機体旋回動作が始まることがあり、車輪や他の構造部分が畝と干渉して畝を崩したりして旋回に支障を生じるおそれがあった。
【0005】
本発明の目的は、簡易なレバー操作により、畝との干渉を生じることなく、機体の旋回が可能となる歩行型野菜苗植付機を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、機体を走行駆動可能に支持する左右の駆動輪(2)と、これら左右の駆動輪(2)の駆動力をサイドクラッチによって個々に断接して旋回可能に伝動する変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、左右の駆動輪(2)を支点として機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行する歩行型野菜苗植付機において、上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了の後に変速伝動機構(11)が左右の駆動輪(2)に旋回伝動をする制御処理を構成したことを特徴とする。
上記歩行型野菜苗植付機は、制御手段(20)により、レバー操作と対応して機体リフト動作の後に機体の旋回動作が制御される。
【発明の効果】
【0007】
請求項1の構成により、上記歩行型野菜苗植付機は、レバー操作と対応して機体リフト動作の後にサイドクラッチによって旋回動作することから、畝高さを超える大きなリフトストロークによって機体のリフト動作に時間を要する場合についても、簡易なレバー操作により、畝との干渉を招くことなく、安定して旋回動作することができる。
【発明を実施するための最良の形態】
【0008】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
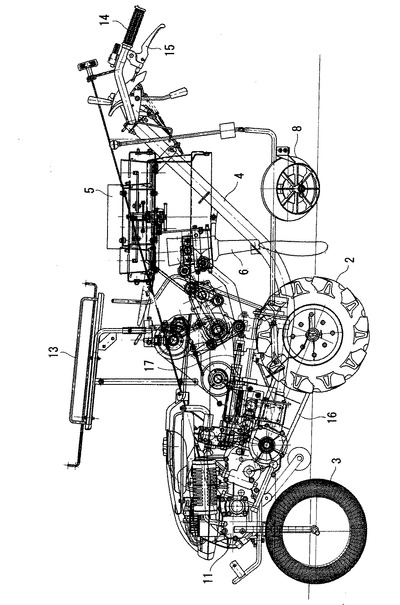
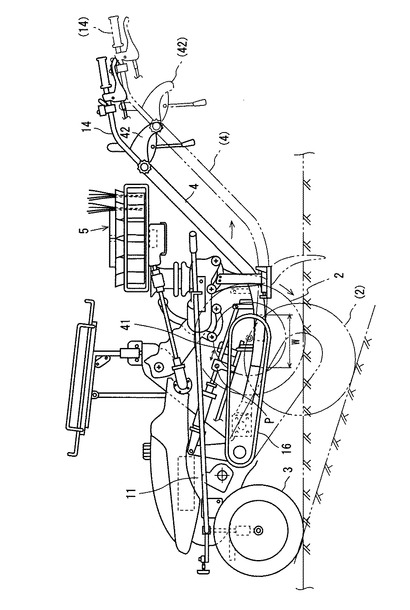
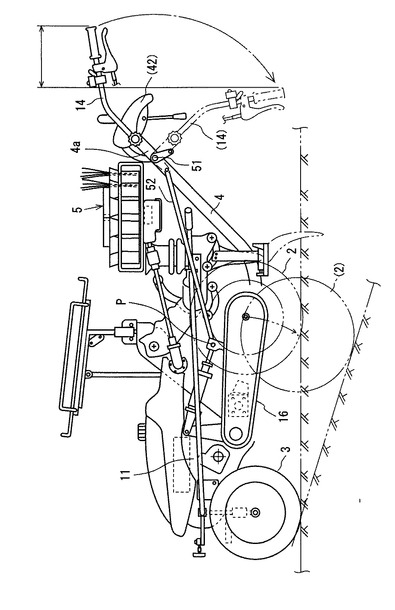
図1は、本発明に係る植付装置を適用した野菜苗植付機の側面図である。なお、以下の図示例についての説明で前又は後というときは、エンジン側を「前」、ハンドル側を「後」とし、右又は左というときは、機体後部において機体前部を向いて立つ作業者から見て右手側を「右」とし、左手側を「左」とする。
【0009】
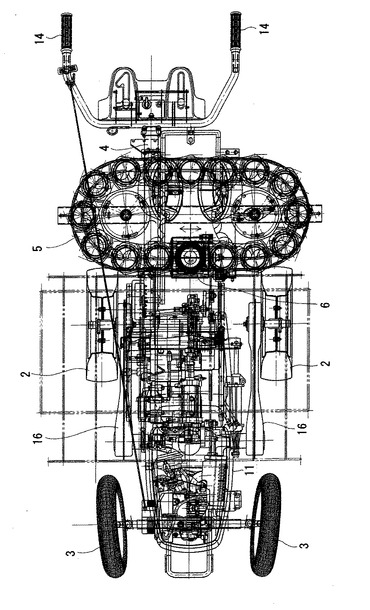
野菜苗植付機は、左右の駆動輪2、2と機体の先端側を案内支持する左右の前輪3、3とを備えた機体フレーム4により圃場走行が可能な走行機体を構成する。その機体フレーム4に装荷した植付部は、作業者から受けた苗株を所定の植付け位置まで周回動作によって移送する周回移送機構5と、この周回移送機構5から苗株を受けて圃場に植付けするべく上下動作する植付機構6と、この植付機構6の下方で埋め戻しする左右の鎮圧輪8,8とから構成される。
【0010】
また、機体フレーム4には、その前部にエンジン一体の変速伝動機構11を一体に構成し、この変速伝動機構11の上方に苗箱枠13を搭載する。同機体フレーム4の後部にはハンドル14を延設する。このハンドル14は、機体前部を浮かして方向転換操作を可能に構成するとともに、走行クラッチ、エンジンスロットル、植付クラッチ等の操作のために、左右のクラッチレバー15,15を含む操作系を集中配置する。
【0011】
変速伝動機構11は、内設した左右のサイドクラッチにより左右の駆動輪2、2に対する動力伝達を制御することによって旋回走行を可能とするとともに、アーム状の左右の走行伝動支持部16,16とその回動駆動用のメインシリンダ17とからなる機体リフト機構を備えて機体の支持高さを調整可能に構成するほか、後方の周回移送機構5と植付機構6に走行同期駆動用動力を供給するべく連結する。
【0012】
(制御部)
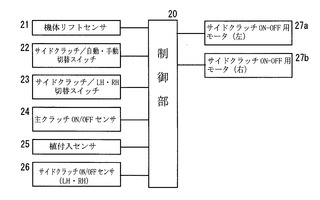
上記構成の野菜苗植付機の機体旋回を含む機器制御を行う制御部20は、図2のシステムブロック構成図に示すように、入力側について、機体リフトセンサ21、変速伝動機構11のサイドクラッチ動作の自動・手動切替スイッチ22、左右のサイドクラッチのLH・RH切替スイッチ23、主クラッチのオン・オフセンサ24、植付入センサ25、左右のサイドクラッチのオン・オフセンサ26を接続して信号を入力し、また、出力側に左右のサイドクラッチのオン・オフ動作モータ27a、27bを接続し、条件に応じて変速伝動機構11の左右のサイドクラッチのオン・オフを制御することにより、機体旋回等の走行制御を可能に構成する。
【0013】
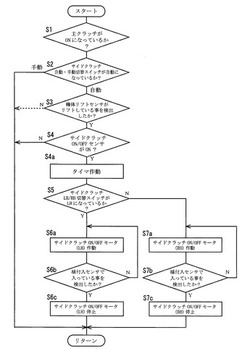
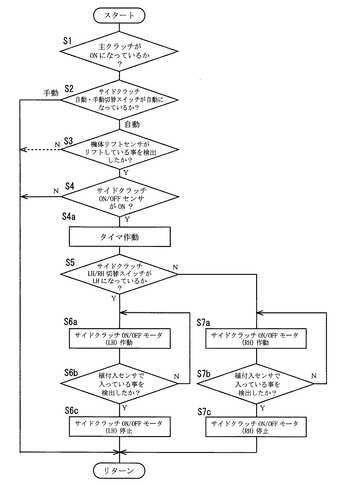
上記制御部20による機体旋回制御は、図3のフローチャートに示すように、主クラッチが「オン」(S1)、サイドクラッチ動作の切替スイッチ22が「自動」(S2)、機体リフトセンサ21による機体リフト(S3)の検出を条件に、サイドクラッチセンサ26の「オン」(S4)の時からタイマによる所定時間の経過(S4a)の後において、サイドクラッチのLH、RH切替スイッチ(S5)に応じて、その対応する側につきサイドクラッチのモータを駆動(S6a、S7a)し、植付入(機体下げ)の検出(S6b、S7b)により駆動を停止(S6c、S7c)するように制御処理を構成する。
【0014】
上記制御処理のように、左右のクラッチレバー15,15のレバー操作と対応して機体リフト機構による機体リフト動作の終了後にサイドクラッチが切断動作するように制御手段を介設することにより、上記歩行型野菜苗植付機は、機体リフト動作の後にサイドクラッチが切断動作されることから、機体のリフト動作に時間を要する場合についても、植付け畝の高さを超えるまで十分な上昇動作によって畝との干渉を招くことなく、安定して旋回動作することができる。
【0015】
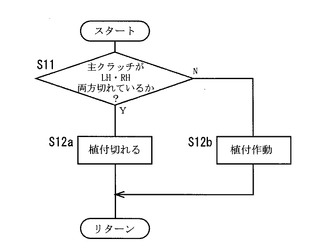
次に、植付部における植付けの制御は、図4のフローチャートに示すように、左右のサイドクラッチの両方切り(S11)の時は植付けを切り(S12a)、非該当なら植付けを作動(S12b)するように制御処理を構成する。そのほか、機体旋回後における左右のサイドクラッチの同時切により、機体下げと植付け入の制御処理を構成する。
【0016】
次に、植付部の別の構成例について説明する。
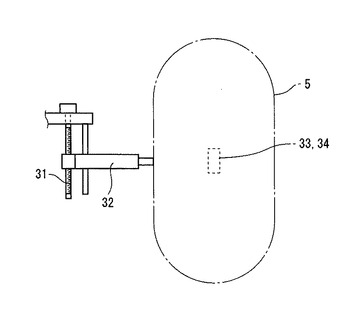
植付部は、別の構成の植付機の平面図を図5に示すように、周回移送機構5および植付機構6を機体幅方向に左右移動可能に構成する。詳細には、植付部の要部平面図を図6に示すように、モータ付きのねじ軸31によって植付部の伝動ケース32を左右方向に駆動して位置調節可能に構成するとともに、GPSによる位置センサ33と直進センサ34を取付けて左右位置調節システムを構成する。
【0017】
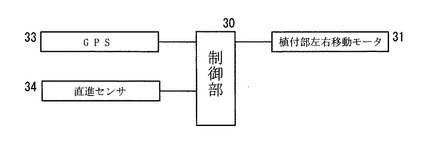
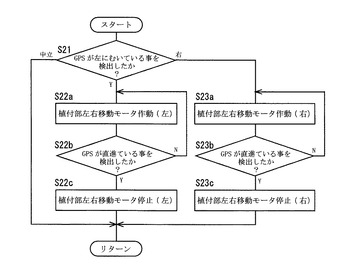
上記左右位置調節システムは、そのシステムブロック構成図を図7に示すように、制御部30に両センサ33,34の信号を受けて植付け部のねじ軸31を駆動するように構成する。詳細な制御構成は、フローチャートを図8に示すように、GPS33,34による左右の方向検出(S21)に対応して、方向検出が左方の場合は植付部の左方移動を制御出力(S22a)し、GPS34による直進の検出(S22b)で左方移動を停止(S22c)する。方向検出が右方の場合は逆方向として前記同様に制御(S23a〜S23c)する。
【0018】
上記構成により、例えば、特開平9−91039号公報の例のような複雑な構成を要することなく、植付部がGPS信号によって左右位置が調節されて畝の中心位置に野菜苗を植付けすることができる。
【0019】
次に、機体フレームの伸縮構造について説明する。
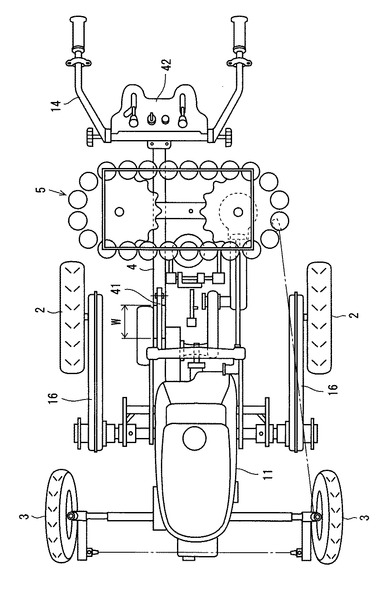
機体フレーム4は、機体の側面図および平面図をそれぞれ図9,図10に示すように、機体フレーム4の基部を伸縮可能な二重構造Wとし、メインシリンダ17から連結フレーム41を介して連結する。このスライド構造により、機体上昇の際のメインシリンダ17の伸びによって機体フレーム4が伸び、また、作業姿勢の際のメインシリンダ17の縮みによって機体フレーム4が縮むように構成することができる。
【0020】
この場合において、ピボットPと機体フレーム4とを連結棒41で繋ぐことにより、機体のローリングによることなく、リフト動作と対応して機体フレーム4を伸縮することができる。そして、機体フレーム4と一体のハンドル14部に操作パネル42を固定することにより、操作パネル42がハンドル14と一緒に動いて常に手元に位置することから、作業性を一定に維持することができる。
【0021】
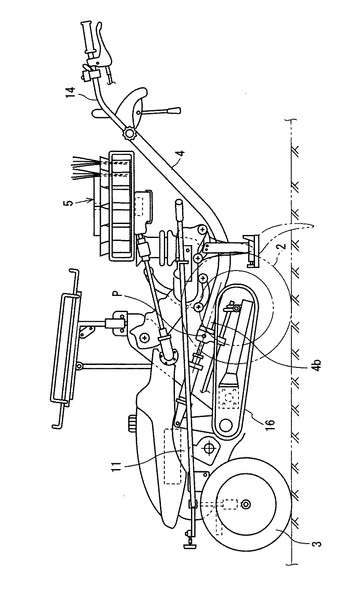
また、機体フレームの別構成例として、機体側面図を図11に示すように、機体フレーム4の基部4bをピボットPに直接固定することにより、連結部材を不要として、ハンドル長さが一定でハンドル位置を変化することができる。この場合において、メインシリンダ17の中心の高さ位置と機体フレーム4の取付け中心の高さ位置を揃えることにより、機体フレーム4の後端のハンドル14を押し下げた際に両者間の高さ位置の差に伴ってメインシリンダ17に作用するモーメントの発生を抑えることができる。
【0022】
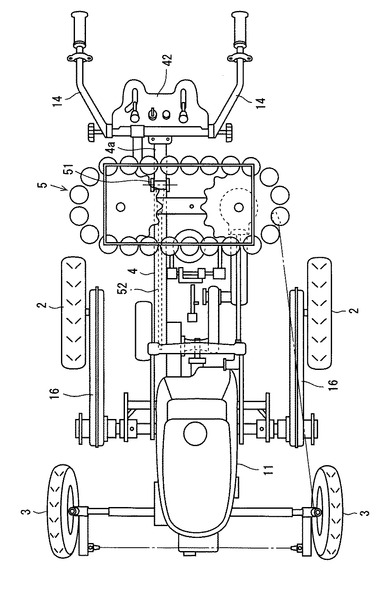
次に、ハンドルの構成例について説明する。
機体フレーム4は、機体の側面図および平面図をそれぞれ図12,図13に示すように、機体フレーム4に回動支点51を設けてその後部を回動フレーム4aとして構成し、この回動フレーム4aを連結ロッド52によりピボットPと連結する。このように機体フレーム4を構成することにより、メインシリンダ17の伸縮でハンドル14が機体姿勢と連動して回動し、移動姿勢ではハンドル14が立ち上がり、作業姿勢では、ハンドル14が下方に倒れて周回移送機構5に近い位置で苗株の投入作業をすることができる。
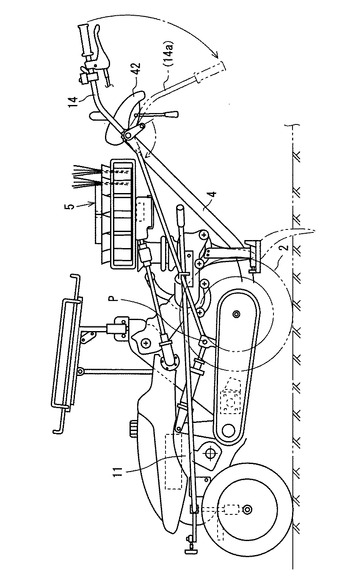
【0023】
また、別の構成例のハンドルは、機体の側面図を図14に示すように、上記回動フレーム4aに代えて一方のハンドル14a(RHハンドル)のみを回動可能に構成することにより、操作パネル42と他方のハンドル14の位置をそのまま維持しつつ、上記同様の効果を得ることができる。
【図面の簡単な説明】
【0024】
【図1】野菜苗株植付機の側面図
【図2】機体旋回システムのブロック構成図
【図3】機体旋回制御のフローチャート
【図4】植付け制御のフローチャート
【図5】別の構成による植付機の平面図
【図6】図5の植付機の要部構成の平面図
【図7】植付部の位置調節システムのブロック構成図
【図8】位置調節システムのフローチャート
【図9】機体フレームの伸縮構造の機体側面図
【図10】図9の機体構成の平面図
【図11】機体フレームの別構成例の機体側面図
【図12】別のハンドル構造についての機体の側面図
【図13】図12の機体構成の平面図
【図14】ハンドルの別の構成例についての機体の側面図
【符号の説明】
【0025】
2 駆動輪
4 機体フレーム
5 周回移送機構(植付部)
6 植付機構(植付部)
11 変速伝動機構(サイドクラッチ)
14 ハンドル
15 クラッチレバー
16 走行伝動支持部(昇降機構)
17 メインシリンダ
20 制御部
21 機体リフトセンサ
22 自動・手動切替スイッチ
【技術分野】
【0001】
本発明は、畝を跨いで野菜苗を植付け走行する歩行型野菜苗植付機に関するものである。
【背景技術】
【0002】
特許文献1に示すように、歩行型田植機は、左右の駆動輪で支持した機体に苗植付装置を備えるともに、左右のサイドクラッチ、機体リフト機構、機体後端部にハンドル等を備えて構成される。左右の駆動輪は機体を走行駆動し、左右のサイドクラッチは、左右の駆動輪の駆動力を個々に断接し、機体リフト機構は油圧シリンダの伸縮動作により左右の駆動輪に対して機体の支持高さ位置を調節し、ハンドルは左右の駆動輪を支点として機体後部の押し下げ操作を可能とする。また、ハンドルには左右のクラッチレバーを備えて左右のサイドクラッチおよび機体リフト機構と連結して構成される。
【0003】
上記歩行型田植機は、機体旋回の際は、左右のクラッチレバーの一方を操作することにより、操作側のサイドクラッチが切れて機体が旋回動作するとともに機体の上昇によって苗植付装置が水面上に待避することから、苗の植付け作業の際の圃場端における機体旋回動作を簡易に行うことができる。
【特許文献1】特開平6−7008号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、畝を跨いで野菜苗を植付け走行する歩行型野菜苗植付機に上記構成を適用した場合は、機体が畝の高さを超えて上昇するまで油圧シリンダの動作に時間を要することから、その間にサイドクラッチの切断によって機体旋回動作が始まることがあり、車輪や他の構造部分が畝と干渉して畝を崩したりして旋回に支障を生じるおそれがあった。
【0005】
本発明の目的は、簡易なレバー操作により、畝との干渉を生じることなく、機体の旋回が可能となる歩行型野菜苗植付機を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、機体を走行駆動可能に支持する左右の駆動輪(2)と、これら左右の駆動輪(2)の駆動力をサイドクラッチによって個々に断接して旋回可能に伝動する変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、左右の駆動輪(2)を支点として機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行する歩行型野菜苗植付機において、上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了の後に変速伝動機構(11)が左右の駆動輪(2)に旋回伝動をする制御処理を構成したことを特徴とする。
上記歩行型野菜苗植付機は、制御手段(20)により、レバー操作と対応して機体リフト動作の後に機体の旋回動作が制御される。
【発明の効果】
【0007】
請求項1の構成により、上記歩行型野菜苗植付機は、レバー操作と対応して機体リフト動作の後にサイドクラッチによって旋回動作することから、畝高さを超える大きなリフトストロークによって機体のリフト動作に時間を要する場合についても、簡易なレバー操作により、畝との干渉を招くことなく、安定して旋回動作することができる。
【発明を実施するための最良の形態】
【0008】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
図1は、本発明に係る植付装置を適用した野菜苗植付機の側面図である。なお、以下の図示例についての説明で前又は後というときは、エンジン側を「前」、ハンドル側を「後」とし、右又は左というときは、機体後部において機体前部を向いて立つ作業者から見て右手側を「右」とし、左手側を「左」とする。
【0009】
野菜苗植付機は、左右の駆動輪2、2と機体の先端側を案内支持する左右の前輪3、3とを備えた機体フレーム4により圃場走行が可能な走行機体を構成する。その機体フレーム4に装荷した植付部は、作業者から受けた苗株を所定の植付け位置まで周回動作によって移送する周回移送機構5と、この周回移送機構5から苗株を受けて圃場に植付けするべく上下動作する植付機構6と、この植付機構6の下方で埋め戻しする左右の鎮圧輪8,8とから構成される。
【0010】
また、機体フレーム4には、その前部にエンジン一体の変速伝動機構11を一体に構成し、この変速伝動機構11の上方に苗箱枠13を搭載する。同機体フレーム4の後部にはハンドル14を延設する。このハンドル14は、機体前部を浮かして方向転換操作を可能に構成するとともに、走行クラッチ、エンジンスロットル、植付クラッチ等の操作のために、左右のクラッチレバー15,15を含む操作系を集中配置する。
【0011】
変速伝動機構11は、内設した左右のサイドクラッチにより左右の駆動輪2、2に対する動力伝達を制御することによって旋回走行を可能とするとともに、アーム状の左右の走行伝動支持部16,16とその回動駆動用のメインシリンダ17とからなる機体リフト機構を備えて機体の支持高さを調整可能に構成するほか、後方の周回移送機構5と植付機構6に走行同期駆動用動力を供給するべく連結する。
【0012】
(制御部)
上記構成の野菜苗植付機の機体旋回を含む機器制御を行う制御部20は、図2のシステムブロック構成図に示すように、入力側について、機体リフトセンサ21、変速伝動機構11のサイドクラッチ動作の自動・手動切替スイッチ22、左右のサイドクラッチのLH・RH切替スイッチ23、主クラッチのオン・オフセンサ24、植付入センサ25、左右のサイドクラッチのオン・オフセンサ26を接続して信号を入力し、また、出力側に左右のサイドクラッチのオン・オフ動作モータ27a、27bを接続し、条件に応じて変速伝動機構11の左右のサイドクラッチのオン・オフを制御することにより、機体旋回等の走行制御を可能に構成する。
【0013】
上記制御部20による機体旋回制御は、図3のフローチャートに示すように、主クラッチが「オン」(S1)、サイドクラッチ動作の切替スイッチ22が「自動」(S2)、機体リフトセンサ21による機体リフト(S3)の検出を条件に、サイドクラッチセンサ26の「オン」(S4)の時からタイマによる所定時間の経過(S4a)の後において、サイドクラッチのLH、RH切替スイッチ(S5)に応じて、その対応する側につきサイドクラッチのモータを駆動(S6a、S7a)し、植付入(機体下げ)の検出(S6b、S7b)により駆動を停止(S6c、S7c)するように制御処理を構成する。
【0014】
上記制御処理のように、左右のクラッチレバー15,15のレバー操作と対応して機体リフト機構による機体リフト動作の終了後にサイドクラッチが切断動作するように制御手段を介設することにより、上記歩行型野菜苗植付機は、機体リフト動作の後にサイドクラッチが切断動作されることから、機体のリフト動作に時間を要する場合についても、植付け畝の高さを超えるまで十分な上昇動作によって畝との干渉を招くことなく、安定して旋回動作することができる。
【0015】
次に、植付部における植付けの制御は、図4のフローチャートに示すように、左右のサイドクラッチの両方切り(S11)の時は植付けを切り(S12a)、非該当なら植付けを作動(S12b)するように制御処理を構成する。そのほか、機体旋回後における左右のサイドクラッチの同時切により、機体下げと植付け入の制御処理を構成する。
【0016】
次に、植付部の別の構成例について説明する。
植付部は、別の構成の植付機の平面図を図5に示すように、周回移送機構5および植付機構6を機体幅方向に左右移動可能に構成する。詳細には、植付部の要部平面図を図6に示すように、モータ付きのねじ軸31によって植付部の伝動ケース32を左右方向に駆動して位置調節可能に構成するとともに、GPSによる位置センサ33と直進センサ34を取付けて左右位置調節システムを構成する。
【0017】
上記左右位置調節システムは、そのシステムブロック構成図を図7に示すように、制御部30に両センサ33,34の信号を受けて植付け部のねじ軸31を駆動するように構成する。詳細な制御構成は、フローチャートを図8に示すように、GPS33,34による左右の方向検出(S21)に対応して、方向検出が左方の場合は植付部の左方移動を制御出力(S22a)し、GPS34による直進の検出(S22b)で左方移動を停止(S22c)する。方向検出が右方の場合は逆方向として前記同様に制御(S23a〜S23c)する。
【0018】
上記構成により、例えば、特開平9−91039号公報の例のような複雑な構成を要することなく、植付部がGPS信号によって左右位置が調節されて畝の中心位置に野菜苗を植付けすることができる。
【0019】
次に、機体フレームの伸縮構造について説明する。
機体フレーム4は、機体の側面図および平面図をそれぞれ図9,図10に示すように、機体フレーム4の基部を伸縮可能な二重構造Wとし、メインシリンダ17から連結フレーム41を介して連結する。このスライド構造により、機体上昇の際のメインシリンダ17の伸びによって機体フレーム4が伸び、また、作業姿勢の際のメインシリンダ17の縮みによって機体フレーム4が縮むように構成することができる。
【0020】
この場合において、ピボットPと機体フレーム4とを連結棒41で繋ぐことにより、機体のローリングによることなく、リフト動作と対応して機体フレーム4を伸縮することができる。そして、機体フレーム4と一体のハンドル14部に操作パネル42を固定することにより、操作パネル42がハンドル14と一緒に動いて常に手元に位置することから、作業性を一定に維持することができる。
【0021】
また、機体フレームの別構成例として、機体側面図を図11に示すように、機体フレーム4の基部4bをピボットPに直接固定することにより、連結部材を不要として、ハンドル長さが一定でハンドル位置を変化することができる。この場合において、メインシリンダ17の中心の高さ位置と機体フレーム4の取付け中心の高さ位置を揃えることにより、機体フレーム4の後端のハンドル14を押し下げた際に両者間の高さ位置の差に伴ってメインシリンダ17に作用するモーメントの発生を抑えることができる。
【0022】
次に、ハンドルの構成例について説明する。
機体フレーム4は、機体の側面図および平面図をそれぞれ図12,図13に示すように、機体フレーム4に回動支点51を設けてその後部を回動フレーム4aとして構成し、この回動フレーム4aを連結ロッド52によりピボットPと連結する。このように機体フレーム4を構成することにより、メインシリンダ17の伸縮でハンドル14が機体姿勢と連動して回動し、移動姿勢ではハンドル14が立ち上がり、作業姿勢では、ハンドル14が下方に倒れて周回移送機構5に近い位置で苗株の投入作業をすることができる。
【0023】
また、別の構成例のハンドルは、機体の側面図を図14に示すように、上記回動フレーム4aに代えて一方のハンドル14a(RHハンドル)のみを回動可能に構成することにより、操作パネル42と他方のハンドル14の位置をそのまま維持しつつ、上記同様の効果を得ることができる。
【図面の簡単な説明】
【0024】
【図1】野菜苗株植付機の側面図
【図2】機体旋回システムのブロック構成図
【図3】機体旋回制御のフローチャート
【図4】植付け制御のフローチャート
【図5】別の構成による植付機の平面図
【図6】図5の植付機の要部構成の平面図
【図7】植付部の位置調節システムのブロック構成図
【図8】位置調節システムのフローチャート
【図9】機体フレームの伸縮構造の機体側面図
【図10】図9の機体構成の平面図
【図11】機体フレームの別構成例の機体側面図
【図12】別のハンドル構造についての機体の側面図
【図13】図12の機体構成の平面図
【図14】ハンドルの別の構成例についての機体の側面図
【符号の説明】
【0025】
2 駆動輪
4 機体フレーム
5 周回移送機構(植付部)
6 植付機構(植付部)
11 変速伝動機構(サイドクラッチ)
14 ハンドル
15 クラッチレバー
16 走行伝動支持部(昇降機構)
17 メインシリンダ
20 制御部
21 機体リフトセンサ
22 自動・手動切替スイッチ
【特許請求の範囲】
【請求項1】
機体を走行駆動可能に支持する左右の駆動輪(2)と、これら左右の駆動輪(2)の駆動力をサイドクラッチによって個々に断接して旋回可能に伝動する変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、左右の駆動輪(2)を支点として機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行する歩行型野菜苗植付機において、
上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了の後に変速伝動機構(11)が左右の駆動輪(2)に旋回伝動をする制御処理を構成したことを特徴とする歩行型野菜苗植付機。
【請求項1】
機体を走行駆動可能に支持する左右の駆動輪(2)と、これら左右の駆動輪(2)の駆動力をサイドクラッチによって個々に断接して旋回可能に伝動する変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、左右の駆動輪(2)を支点として機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行する歩行型野菜苗植付機において、
上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了の後に変速伝動機構(11)が左右の駆動輪(2)に旋回伝動をする制御処理を構成したことを特徴とする歩行型野菜苗植付機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−82116(P2009−82116A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−259981(P2007−259981)
【出願日】平成19年10月3日(2007.10.3)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年10月3日(2007.10.3)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]