
歩行支援装置、及び歩行支援プログラム
【課題】歩き方が異なる場合であっても、一定の負担感での歩行支援を行う。
【解決手段】1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積が基準角力積zと均しくなるようにアシスト率βを設定する。これにより歩行パラメータの値が変わっても、一定の基準角力積zの負担感で歩くことが可能になる。
【解決手段】1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積が基準角力積zと均しくなるようにアシスト率βを設定する。これにより歩行パラメータの値が変わっても、一定の基準角力積zの負担感で歩くことが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行支援装置、及び歩行支援プログラムに関し、例えば、歩行をアシストするものに関する。
【背景技術】
【0002】
近年、介護ビジネスなどを中心に、人の動作(歩行や持ち上げなど)に使われる筋力を補助する装着型ロボット(パワーアシストスーツ)などが開発されている。
装着型ロボットには、アシスト箇所として、上半身の筋力を補助するもの、下半身の筋力を補助するもの、あるいは、全身の筋力を補助するものなど各種のものがある。
また、装着型ロボットの用途も、健常者用から高齢者・障害者の補助用などがある。
【0003】
装着型ロボットは、例えば、装着者の筋電から筋肉の動きを解析したり、関節各部に配置した姿勢センサで検出される装着者の動きを解析することで、当該動きに必要な関節モーメントを算出し、これに応じた必要なアシスト力を発生させている。これによって、装着者は、重量物の持ち上げや歩行を楽に行うことができる。
【0004】
このような技術に、特許文献1の「装着式動作補助装置、装着式動作補助装置の制御方法および制御用プログラム」がある。
この技術は、装着者に設置したセンサによって生体信号を検出し、これを用いて装着者の意思に従った動力をアクチュエータに発生させるものである。
【0005】
しかし、従来の装着型ロボットは、装着者の関節に発生する関節モーメントに対して一定の割合でアシスト力を発生させるものであり、各歩行シーン(平地、階段、坂道等)や各歩行パラメータ値(歩幅、歩調等)の違いに応じたアシストを行っている訳ではない。
このため、同一割合でのアシストをしたとしても、装着者にとってみると、歩行シーンや歩き方の違い(歩行パラメータ値の違い)によっては、アシスト力不足と感じる場合がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−95561号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、歩き方が異なる場合であっても、一定の負担感での歩行支援を行うことを目的とする。
【課題を解決するための手段】
【0008】
(1)請求項1に記載の発明では、1歩行周期の歩行に対して必要な角力積のうち、歩行支援対象者の負担分である基準角力積zを記憶する基準角力積記憶手段と、歩行中の前記歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得手段と、前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出手段と、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が前記基準角力積zとなるように、アシスト力を決定するアシスト力決定手段と、前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援手段と、を具備することを特徴とする歩行支援装置を提供する。
(2)請求項2記載の発明では、1歩行周期に対する重複歩距離と、重複歩調を前記歩行パラメータとし、前記歩行パラメータ値取得手段は、1歩行周期に対する重複歩距離と重複歩調の値を歩行パラメータの値として取得する、ことを特徴とする請求項1に記載の歩行支援装置を提供する。
(3)請求項3記載の発明では、歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を記憶する回帰式記憶手段を備え、前記回帰式における最適解を導く歩行パラメータの値による歩行を基準歩行として、当該基準歩行において前記歩行支援対象者が負担すべき1歩行周期の角力積を基準角力積とし、前記角力積M1は、前記取得した歩行パラメータの値を前記回帰式に代入することで算出する、ことを特徴とする請求項1、又は請求項2に記載の歩行支援装置を提供する。
(4)請求項4記載の発明では、前記回帰式記憶手段は、種々の各歩行状態で歩行することで計測される1歩行周期に対する各歩行パラメータの値と角力積とを歩行データとし、当該歩行データから応答曲面法又は重回帰分析により導出した回帰式を記憶する、ことを特徴とする請求項3に記載の歩行支援装置を提供する。
(5)請求項5記載の発明では、前記歩行パラメータ値取得手段は、左右の脚のいずれか一方を対象脚とした場合に、当該対象脚の1歩行周期毎の歩行パラメータを取得し、前記角力積算出手段は、前記取得した各1歩行周期の歩行パラメータ毎に前記対象脚の角力積M1を算出し、前記アシスト力決定手段は、1つ前の1歩行周期に対して算出された前記対象脚の角力積M1から、前記対象脚に対する次の1歩行周期のアシスト力を決定する、ことを特徴とする請求項1から請求項4のうちのいずれか1の請求項に記載の歩行支援装置を提供する。
(6)請求項6記載の発明では、歩行支援対象者が歩行する歩行面の種類を判定する歩行面判定手段を備え、前記基準角力積記憶手段は、各歩行面の種類毎に基準角力積zを記憶し、前記角力積算出手段は、前記取得した歩行パラメータの値と前記判定した歩行面の種類から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出し、前記アシスト力決定手段は、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、前記判定した歩行面の種類に対応して記憶した前記基準角力積zとなるように、アシスト力を決定する、ことを特徴とする請求項1から請求項5に記載の歩行支援装置を提供する。
(7)請求項7記載の発明では、歩行中の歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得機能と、前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出機能と、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、1歩行周期の歩行に対して必要な角力積のうち前記歩行支援対象者の負担分である基準角力積zとなるように、アシスト力を決定するアシスト力決定機能と、前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援機能と、をコンピュータに実現させる歩行支援プログラムを提供する。
【発明の効果】
【0009】
本発明によれば、歩き方が異なる場合であっても必要なアシスト力で歩行支援を行うことで、歩行支援対象者は一定の角力積負担感で歩行することができる。
【図面の簡単な説明】
【0010】
【図1】平地を2種類の歩行状態で歩行した場合の、1歩行周期における時間と関節モーメントとの関係を表した説明図である。
【図2】装着型ロボットの装着状態を示した図である。
【図3】装着型ロボットのシステム構成を示した図である。
【図4】歩行支援装置における事前処理の動作を表したフローチャートである。
【図5】事前処理において使用する歩行データの説明図である。
【図6】歩行データから求めた回帰式を3次元で表したグラフである。
【図7】歩行動作判定処理について表したフローチャートである。
【図8】制御部が歩行支援を行う手順を説明するためのフローチャートである。
【図9】後方移動処理を説明するためのフローチャートである。
【図10】歩行アシスト処理の動作を示したフローチャートである。
【発明を実施するための形態】
【0011】
(1)実施形態の概要
装着型ロボット1(図2)は、装着者(歩行支援対象者)の筋電から筋肉の動きを解析したり、関節各部に配置した姿勢センサで検出される装着者の動きを解析することで、当該動きに必要な関節モーメントを算出し、これに応じた必要なアシスト力を発生させることで各関節の動作を支援する。例えば、股関節アシストアクチュエータ17で股関節の動作を支援し、膝関節アシストアクチュエータ18で膝関節の動作を支援し、足首関節アシストアクチュエータ19で足首関節の動作を支援する。
即ち装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。
【0012】
一般に人が歩行する場合、歩幅や歩調などの歩行状態によって各関節に必要とされる関節モーメントは異なっている。例えば、一番楽な歩き方を基準とした場合の各関節モーメントに比べて、歩幅を広くしたり、早足で歩いたりした場合の各関節モーメントの方が大きくなる。
従って、この各関節モーメントに対して一律50%のアシストをしたとしても、装着者が負担すべき関節モーメントや力が変化してしまうことになる。
【0013】
そこで、本実施形態では、1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。
すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積(=基準歩行で装着者が負担する角力積)を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積(負担角力積)が基準角力積zと均しくなるようにアシスト率βを設定する。
これにより歩行パラメータの値が変わったとしても、人が出力する力(負担角力積)を意識することなく一定の基準角力積zによる負担感で歩くことが可能になる。
なお、アシスト率とは歩行に必要な力に対するアシスト力の割合(単位:%)をいう。
【0014】
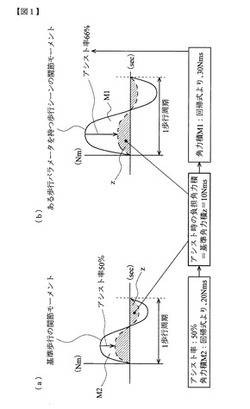
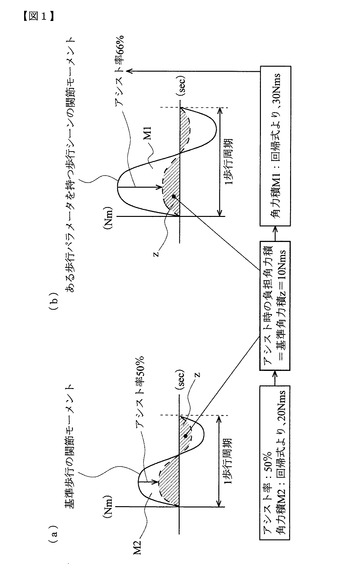
図1は、平地を2種類の歩行状態で歩行した場合の、1歩行周期における時間と関節モーメントとの関係を表したものである。
図1において、実線は1歩行周期における特定の関節の関節モーメントを表している。一方、点線はアシストにより装着者が負担する関節モーメントであり、その絶対値を1歩行周期に渡って時間積分したものが角力積であり、図中の斜線で表した部分の合計面積がこれに相当する。
【0015】
なお、1歩行周期は、左右どちらかの足が接地してから、同じ側の足が次に着地するまでの動作(これを「重複歩」という)に要する時間であり、足が接地している立脚相(前半約60%)と離地している遊脚相(後半約40%)とに分けられ、両相に応じてモーメントの方向が逆になっている。
【0016】
そして、1歩行周期における角力積が最小値になる歩き方(歩行状態)を基準歩行と定義する。そして、基準歩行における関節モーメントの変化が図1(a)の実線で示され、この実線部分の面積が無アシストによる角力積の最小値であり、この値が20(Nms)であったものとする。
この基準歩行に対して、アシスト率α=50%のアシストを行う場合、装着者は図1(a)の斜線で示す合計10Nmsの角力積(=基準角力積z)を負担すればよいことになる。
【0017】
一方、図1(b)の実線は、基準歩行と異なる歩き方(歩行状態)で実際に行われた1歩行周期の歩行に対する、関節モーメントの変化を表したものである。
本実施形態では、基準歩行以外の歩行に対しても、図1(b)の斜線で示すように、装着者が負担する角力積(負担角力積)が、基準角力積z=10Nmsと同じに成るように、アシスト率βを決定し、当該アシスト率βで該当する関節のアシストを行う。
【0018】
本実施形態では、歩き方(歩行状態)を特定するためのパラメータを歩行パラメータとし、重複歩調と重複歩距離を使用する。そして、種々の各歩行状態で歩いた場合の、歩行パラメータ値に対する角力積(関節モーメントから算出)を歩行データとして予め計測する。
この歩行データに対して応答曲面法や重回帰分析等を用いて、歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を導出しておく。この回帰式は、各歩行シーン(歩行面種類(平地、上り坂道、下り坂道、上り階段、下り階段)5種類×進行方向(前方、後方)2種類=10シーン)に対して、右脚用、左脚用の各関節(股関節、膝関節、足首関節)分だけ、すなわち、10×2×3=60導出する。
導出した各回帰式において、最適解(最小の角力積)を導く歩行パラメータの値を持つ歩行状態を基準歩行とする。
【0019】
そして、実際に歩行が開始されると、1歩行周期前の歩行パラメータ値に対する角力積M1を回帰式から求め、次の1歩行周期も直前の歩行周期と同じ歩行パラメータ値であると仮定し、次の重複歩に対する負担角力積が基準角力積zと均しくなるようにアシスト率βを決定し、次の重複歩に対してアシスト率βのアシストを行う。
図1(a)(b)に示した例で説明すると、歩行パラメータ値と回帰式から求めた角力積M1が30Nmsで、基準角力積zが10Nmsなので、20Nms(=30−10)を歩行支援装置でアシストすることで、負担角力積=基準角力積zとなる。
従って、アシスト率β={(M1−z)/M1}×100=66%(=(20/30)×100)が求まるので、次の重複歩行に対して、関節モーメントの66%をアシストすることで、装着者は常時一定の角力積負担感で歩行することができる。
【0020】
(2)実施形態の詳細
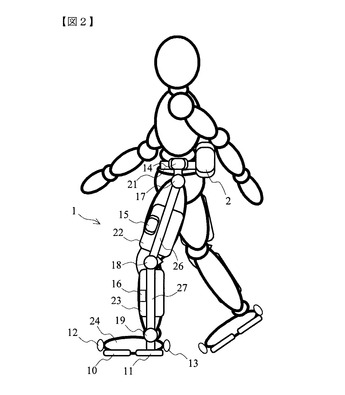
図2は装着型ロボット1の装着状態を示した図である。
装着型ロボット1は、装着者の腰部及び下肢に装着し、装着者の歩行を支援(アシスト)するものである。
装着型ロボット1は、腰部装着部21、上腿装着部22、下腿装着部23、足装着部24、上腿連結部材26、下腿連結部材27、制御装置2、つま先反力センサ10、踵反力センサ11、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、上腿姿勢センサ15、下腿姿勢センサ16、股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19などを備えている。なお、腰部装着部21、制御装置2、腰姿勢センサ14以外は、左右の両足に設けられており、それぞれの検出値が出力されるようになっている。
但し、つま先反力センサ10、踵反力センサ11については、反力の検出が不要である実施例の場合には、両センサに変えてつま先接地センサ、踵接地センサを備えるようにしてもよい。
【0021】
腰部装着部21は、装着者の腰部の周囲に取り付けられ装着型ロボット1を固定する。
腰姿勢センサ14は、腰部装着部21に取り付けられ、ジャイロなどによって腰部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、腰部の角速度や角加速度を求めることもできる。
【0022】
制御装置2は、腰部装着部21に取り付けられ、装着型ロボット1の動作を制御する。
股関節アシストアクチュエータ17は、装着者の股関節と同じ高さに設けられており、腰部装着部21に対して上腿連結部材26を前後方向に駆動する。なお、股関節アシストアクチュエータ17を3軸アクチュエータとして横方向にも駆動するように構成することもできる。
【0023】
上腿連結部材26は、装着者の上腿部の外側に設けられた剛性を有する柱状部材であり、股関節アシストアクチュエータ17と膝関節アシストアクチュエータ18を連結する。
上腿装着部22は、外側が上腿連結部材26の内側に固定されており、内側が装着者の上腿に固定される。
上腿姿勢センサ15は、上腿部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、上腿部の角速度や角加速度を求めることもできる。
【0024】
膝関節アシストアクチュエータ18は、装着者の膝関節と同じ高さに設けられており、上腿連結部材26に対して下腿連結部材27を前後方向に駆動する。
下腿連結部材27は、装着者の下腿部の外側に設けられた剛性を有する柱状部材であり、膝関節アシストアクチュエータ18と足首関節アシストアクチュエータ19を連結する。
【0025】
下腿装着部23は、外側が下腿連結部材27の内側に固定されており、内側が装着者の下腿に固定される。
下腿姿勢センサ16は、下腿部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、下腿部の角速度や角加速度を求めることもできる。
【0026】
足首関節アシストアクチュエータ19は、装着者の足首関節と同じ高さに設けられており、下腿連結部材27に対して足装着部24のつま先を上下する方向に駆動する。
足装着部24は、装着者の足部(足の甲、及び足裏)に固定される。一般に、足指の付け根の関節は歩行の際に屈曲するが、足装着部24も足指の付け根の部分が足指に従って屈曲するようになっている。
【0027】
つま先姿勢センサ12と踵姿勢センサ13は、それぞれ、足装着部24の先端と後端に設置され、それぞれ、つま先と踵の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、つま先や踵の角速度や角加速度を求めることもできる。
【0028】
つま先反力センサ10は、足装着部24の足裏部前方に設置され、つま先の接地を検出すると共に、歩行面からの反力を検出する。
踵反力センサ11は、足装着部24の足裏部後方に設置され、踵の接地を検出すると共に、歩行面からの反力を検出する。
以上のように構成された装着型ロボット1は、股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19を駆動することにより、装着者の歩行を支援する。
【0029】
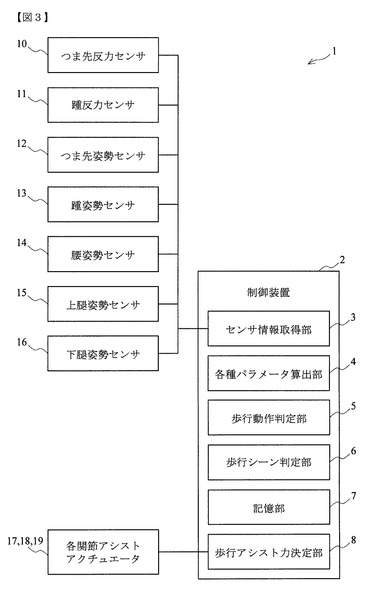
図3は、装着型ロボット1のシステム構成を示した図である。
制御装置2は、図示しないCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、時間を計測する手段としての時計、記憶部7、各種インターフェースなどを備えた電子制御ユニットであり、装着型ロボット1の各部を電子制御する。
【0030】
制御装置2は、また、CPUで記憶部7に記憶された歩行支援プログラム等の各種プログラムを実行することにより構成される、センサ情報取得部3、各種パラメータ算出部4、歩行動作判定部5、歩行シーン判定部6、歩行アシスト力決定部8を備えている。
センサ情報取得部3は、つま先反力センサ10〜下腿姿勢センサ16の各センサから検出値を取得する。センサ情報取得部3で取得した各センサの検出値は、歩行動作の判定(図7)や、歩行シーンの判定(図8、図9)や、歩行パラメータの算出(図10)等に使用される。
【0031】
各種パラメータ算出部4は、センサ情報取得部3で取得した検出値から、各関節の角度や位置を求めることで歩行パラメータ値(重複歩調と重複歩距離)を算出する。
ここで、1側の踵が接地してから次に同側の踵が接地するまでの動作を重複歩といい、この重複歩における一連の動作を歩行周期という。そして、重複歩における踵の両接地点間の距離を重複歩距離といい、1分間当たりの重複歩数(重複歩数/分)を重複歩調という。
【0032】
歩行動作判定部5は、装着者の動作が屈伸運動や足踏み動作などの歩行以外の動作なのか、それとも実際に歩行している動作なのかを判定する。
歩行シーン判定部6は、センサ情報取得部3で取得した検出値から、装着者の歩行している歩行シーンを判定する。判定対象となる歩行シーンとしては、歩行面種類(平地、上り階段、下り階段、上り坂道、下り坂道)の5種類のそれぞれに対して、前進歩行と後進歩行の歩行方向2種類があり、合計10の歩行シーンがある。
【0033】
歩行アシスト力決定部8は、左右両足のそれぞれに配置されている股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19に出力させるアシスト力を決定し、これに従ってこれらアシストアクチュエータを駆動する。なお、アシスト力とは、装着型ロボット1がアシストアクチュエータを駆動して脚部に作用させるモーメント(トルク)である。
【0034】
次に、以上のように構成された歩行支援装置における各種処理、動作について説明する。
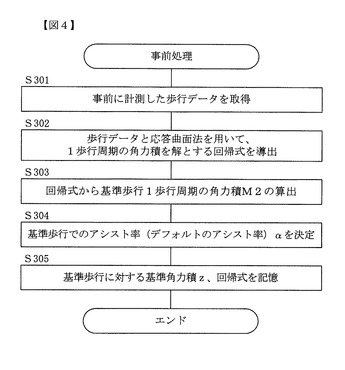
図4は、歩行支援装置における事前処理の動作を表したものである。
この処理は、上述した10種類の各歩行シーンにおける、左右両足の各関節に対する基準角力積zと回帰式を求める処理である。この事前処理は、歩行支援装置毎に行われるものではなく、各装着者に共通する処理であるため、歩行データに併せて適宜行う処理である。この状態では歩行支援装置の制御装置2で行うものとして説明するが、他の制御装置で事前処理を行うことで得られた基準角力積zと回帰式を、個々の歩行支援装置に記憶及び使用するようにしてもよい。
【0035】
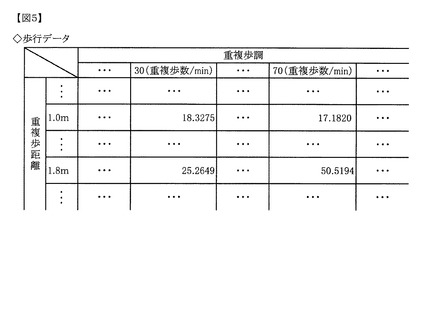
まず、事前処理において制御装置2は、事前に計測した各歩行パラメータ値毎の歩行データを取得する(ステップ301)。
図5は、取得する歩行データについて表したものである。
この図5に示すように、歩行データは、種々の歩行パラメータ値(重複歩調、重複歩距離)で歩行した場合の、膝関節に対する角力積の値である。図5の例では、1分間の重複歩数30の重複歩調(歩行テンポ)で、重複歩距離1.0mで歩いた場合における1歩行周期の角力積が18.3275(Nms)と計測されている。
【0036】
各歩行パラメータ値に対する角力積の値は次のようにして測定及び算出する。
すなわち、各関節やつま先、踵などの所定箇所にマーカーを付けた被験者に、各歩行パラメータ値に対応した歩行、例えば、重複歩調30(重複歩数/min)、重複歩距離1.0mでの歩行をしてもらい、これを複数台のカメラで撮影する。
この画像から、そして、マーカーの動きを解析することで、図1に示すように、各関節に対する関節モーメントの変化を求め、そして、1歩行周期の関節モーメントを時間積分することで1歩行周期の角力積が求まる。
なお、各歩行パラメータ値に従った歩行を被験者にしてもらうのではなく、被験者に色々なパターンの歩行を自由に行ってもらい、その時のマーカーの動きから歩行パラメータ値と、関節モーメントの変化を求めることで、各歩行パラメータ値に対応した1歩行周期の角力積(歩行データ)を求めるようにしてもよい。
【0037】
図4に戻り、制御装置2は、取得した歩行データと応答曲面法を用いて、歩行パラメータ値を変数として1歩行周期の角力積を解とする回帰式Zを導出する(ステップ302)。
歩行データから回帰式を求めることで、あらゆる歩行パラメータの値における角力積の測定を詳細に測定することなく、後述する基準歩行や基準角力積z(後述)を求めたり、歩行支援において検出された歩行パラメータ値に対する角力積を求めることができる。
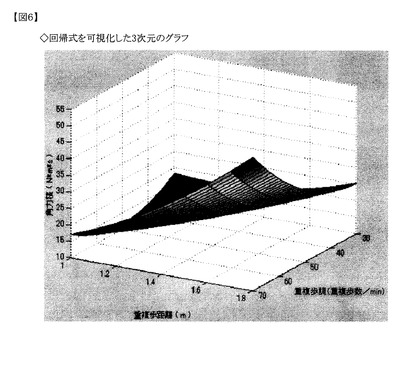
一例として、応答曲面法を用いて、図5に例示した膝関節に対する歩行データから求めた回帰式Z(膝)は、次数式のようになる。
なお、数式において、パラメータXは重複歩調を、Yは重複歩距離を表す。また数式において@2は、その前の数式/数値の平方を表すものとする。
【0038】
Z(膝)=−0.149×X
+7.771×Y
+0.825×(X−42.7594)×(Y−1.1174)
+0.015×(X−42.7594)@2
+20.218×(Y−1.1174)@2
+11.070
【0039】
図6は、図5の歩行データから求めた膝関節に対する上記回帰式Z(膝)を3次元のグラフで可視化したものである。
この図6に示すように、回帰式Zにより、歩行支援において検出した歩行パラメータ値の重複歩調の値をX軸に、重複歩距離の値をY軸に当てはめることで、Z軸の値から当該方向パラメータ値で歩行した場合に必要な角力積(アシスト無し)が求まる。
【0040】
次に制御装置2は、算出した回帰式Zから、基準歩行と、その1歩行周期の角力積を算出する(ステップ303)。
すなわち、算出した回帰式Zにおいて、最適解(最小の角力積)を導く歩行パラメータ値を持つ歩行を基準歩行とし、この基準歩行における1歩行周期の角力積を算出する。
上記した図5の歩行データから導いた回帰式Z(膝)の場合、歩行パラメータ値が重複歩調51(重複歩数/分)、重複歩調 1.0(m) のときが基準歩行で、その時の角力積(最小値)は11.7411(Nms)である。
【0041】
そして制御装置2は、基準歩行でのアシスト率αを決定する(ステップ304)。
なお、このアシスト率はデフォルトの値であり、歩行支援装置の装着者が各自調節(増減)することができるようにしてもよい。
【0042】
次に制御装置2は、基準歩行に対する基準角力積zと回帰式を記憶部7に記憶し(ステップ305)、処理を終了する。
ここで基準角力積zは、基準歩行における1歩行周期の角力積M2に(1−アシスト率α×0.01)を乗じた値であり、基準歩行における1歩行周期の角力積M2から、歩行支援装置でアシストする角力積(M2×α×0.01)を除いた角力積(=基準歩行で装着者が負担する角力積)である。すなわち、z=M2×(1−α×0.01)である。
なお、ステップ305で記憶する基準角力積zと回帰式は、上記した10の歩行シーン毎、左右の脚毎、更に、各関節(股関節、膝関節、足首関節)毎に、算出され記憶される。すなわち、合計で10×2×3=60の基準角力積zと回帰式が記憶部7に記憶される。
【0043】
次に、実際の歩行支援装置を装着した後の歩行支援処理について説明する。
この歩行支援処理は、右脚と左脚のそれぞれに対して別々に処理及び制御が行われる。以下の説明では、処理及び制御の対象となっている側の脚を対象脚として説明する。
この歩行支援処理においては、サブルーチンとして歩行動作判定処理、及び歩行シーン判定処理が行われるので、先に両処理について説明する。
この歩行動作判定処理は、歩行動作判定部5の処理として制御装置2が実行するものであり、装着者の動作が屈伸運動や足踏み動作などの歩行以外の動作なのか、それとも実際に歩行している動作なのかを判定する処理である。
【0044】
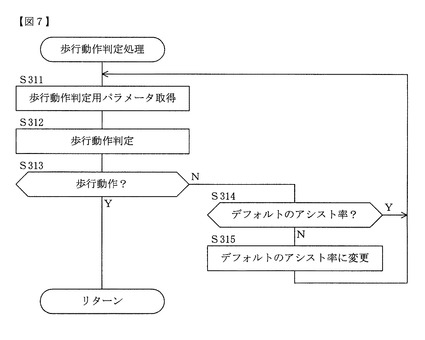
図7は、歩行動作判定処理について表したフローチャートである。
制御装置2は、センサ情報取得部3から歩行動作判定用のパラメータ値を取得する(ステップ311)。なお、歩行動作判定処理は、歩行支援装置を装着し電源をオンした時点から継続的に行われており、取得するパラメータ値も継続的に取得している。
【0045】
そして、制御装置2は、取得するパラメータ値から歩行動作判定を行う(ステップ312)。
この歩行動作判定では、各センサの出力値(パラメータ値)から、装着者が動いていない場合や、動いた場合でも例えば屈伸運動をしただけの場合、片側の足を上げ下げしただけの場合、その場での足踏みをした場合などの歩行以外の動きと、実際の歩行動作とを区別して判定するものである。
具体的には、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、浮上した足の上腿姿勢センサ15、下腿姿勢センサ16、(以下、姿勢センサ12〜16と略記する)の検出値から各関節の角度を計算して足の浮上を検出し、その後、つま先反力センサ10、踵反力センサ11(以下、反力センサ10、11と略記する)の出力値から同側の足が前方又は後方に接地したと判断した場合に歩行動作と判断する。
【0046】
なお、歩行動作か否かの判定については、反力センサ10、11と姿勢センサ12〜16の検出値から計算される足の動きから、立脚相と遊脚相が判定された場合に歩行動作と判定するようにしてもよい。
【0047】
歩行動作判定(ステップ312)の結果、歩行動作ではないと判定した場合(ステップ313;N)、制御装置2は、現在設定されているアシスト率がデフォルトのアシスト率か否かを判断する(ステップ314)。
デフォルトのアシスト率であれば(ステップ314;Y)、制御装置2は、アシスト率を変更することなくステップ311に戻って、歩行動作の監視、判定を継続する。
一方、デフォルトのアシスト率ではない場合(ステップ314;N)、制御装置2は、現在設定されているアシスト率をデフォルトのアシスト率に変更し(ステップ315)、その後ステップ311に戻って歩行動作の監視、判定を継続する。
ステップ312で行った歩行動作判定において歩行動作と判定された場合(ステップ313;Y)、制御装置2はメインルーチン(図10)にリターンする。
【0048】
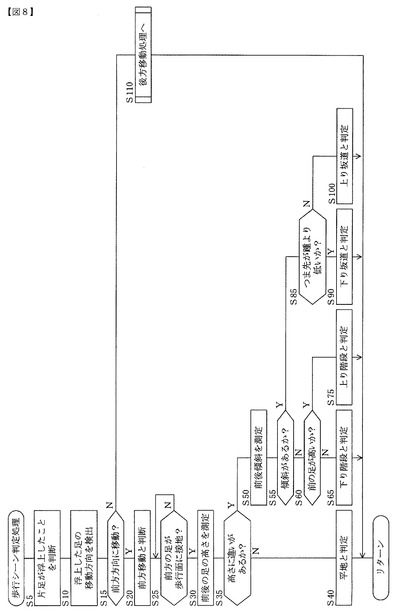
次に、歩行シーン判定処理について図8、9を参照して説明する。
この歩行シーン判定処理では、歩行面種類(平地、上り階段、下り階段、上り坂道、下り坂道)5種類に対して進行方向(前方、後方)2種類、合計10種類の歩行シーンのうちの何れの歩行シーンであるのかを判定する。
図8は、装着者が歩行周期を開始した場合に、制御装置2が歩行支援を行う手順を説明するためのフローチャートである。
まず、装着者が歩行周期を開始すると、制御装置2は、つま先反力センサ10、踵反力センサ11からの検出値によって、足装着部24が歩行面から離れたことを検出し、片足が浮上したと判断する(ステップ5)。
【0049】
次に、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、浮上した足の上腿姿勢センサ15、下腿姿勢センサ16、(以下、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、上腿姿勢センサ15、下腿姿勢センサ16を姿勢センサと略記する)の検出値から各関節の角度を計算し、浮上した足の移動方向を検出する(ステップ10)。
次に、制御装置2は、浮上した足が前方方向に移動しているか否かを判断する(ステップ15)。
浮上した足が前方方向に移動していると判断した場合(ステップ15;Y)、制御装置2は、装着者が前方移動すると判断する(ステップ20)。
一方、前方方向に移動していないと判断した場合(ステップ15;N)、制御装置2は、後述の後方移動処理を行う(ステップ110)。
【0050】
制御装置2は、前方移動と判断した場合(ステップ20)、前方の足のつま先反力センサ10、踵反力センサ11からの検出値により、前方の足が歩行面に接地したか否かを判断する(ステップ25)。
前方の足が歩行面に接地していないと判断した場合(ステップ25;N)、制御装置2は、ステップ25にて前方の足が歩行面に接地したか否かの監視を継続し、前方の足が歩行面に接地したと判断した場合(ステップ25;Y)、制御装置2は、両足の姿勢センサの出力から両足の各関節の角度を算出し、これによって前後の足の高さを測定する(ステップ30)。
なお、足の高さは、例えば、踵(踵姿勢センサ13)の高さや、足首関節(足首関節アシストアクチュエータ19)の高さなど、適当な部位の高さを用いることができる。
【0051】
次に、制御装置2は、前後の足の高さに違いがあるか否かを判断し(ステップ35)、違いがない場合(ステップ35;N)、制御装置2は、歩行シーンが平地の前進であると判定し(ステップ40)、メインルーチン(図10)にリターンする。
前後の足の高さに違いがある場合(ステップ35;Y)、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13の検出値により、前に出した足の足装着部24の前後傾斜を測定する(ステップ50)。
【0052】
次に、制御装置2は、前後傾斜があるか否かを判断し(ステップ55)、前後傾斜がない場合(ステップ55;N)、制御装置2は、姿勢センサの検出値から前方の足が後方の足より高いか否かを判断する(ステップ60)。
前方の足が高くない場合、即ち、前方の足が低い場合(ステップ60;N)、制御装置2は、歩行シーンが下り階段の前進であると判定し(ステップ65)、メインルーチンにリターンする。
【0053】
前方の足が後方の足よりも高い場合(ステップ60;Y)、制御装置2は、歩行シーンが上り階段の前進であると判定し(ステップ75)、メインルーチンにリターンする。
また、前に出した足の足装着部24に前後傾斜がある場合(ステップ55;Y)、制御装置2は、前方の足のつま先姿勢センサ12、踵姿勢センサ13の検出値からつま先が踵よりも低いか否かを判断する(ステップ85)。
【0054】
つま先が踵よりも低い場合(ステップ85;Y)、制御装置2は、歩行シーンが下り坂道の前進であると判定し(ステップ90)、メインルーチンにリターンする。
つま先が踵よりも低くない場合、即ち、踵がつま先よりも低い場合(ステップ85;N)、制御装置2は、歩行シーンが上り坂道の前進であると判定し(ステップ100)、メインルーチンにリターンする。
【0055】
以上のようにして、装着型ロボット1は、つま先、踵の接地の有無、及び、下肢の姿勢から装着者が平地、下り階段、上り階段、下り坂道、上り坂道の何れを前進歩行するのか、その歩行面の種類を判定することができる。
【0056】
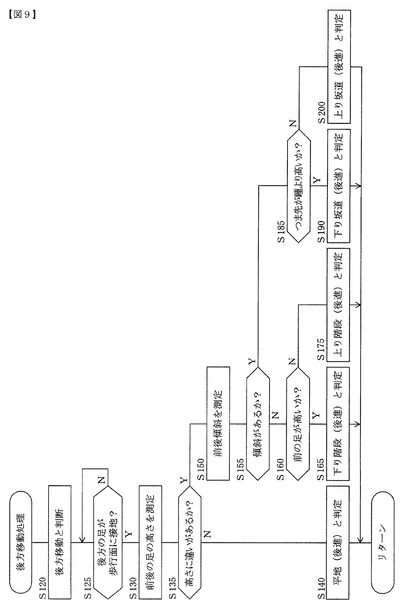
図9は、ステップ110(図8)の後方移動処理を説明するためのフローチャートである。
制御装置2は、浮上した足が後方に移動する場合、後方移動であると判断する(ステップ120)。
次に、制御装置2は、つま先反力センサ10、踵反力センサ11の検出値により、後方の足が歩行面に接地したか否かを判断する(ステップ125)。
後方の足が歩行面に接地していない場合(ステップ125;N)、制御装置2は、ステップ125にて接地したか否かを監視する。
【0057】
後方の足が歩行面に接地した場合(ステップ125;Y)、制御装置2は、両足の姿勢センサの検出値により、両足の各関節の角度を計算し、これによって前後の足の高さを測定する(ステップ130)。
前後の足の高さに違いがない場合(ステップ135;N)、制御装置2は、歩行シーンが平地の後進であると判定し(ステップ140)、メインルーチン(図10)にリターンする。
【0058】
前後の足の高さに違いがある場合(ステップ135;Y)、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13の検出値により、後方の足の足装着部24の前後傾斜を測定する(ステップ150)。
次に、制御装置2は、前後傾斜があるか否かを判定し(ステップ155)、前後傾斜がない場合(ステップ155;N)、制御装置2は、姿勢センサの検出値から前方の足が後方の足より高いか否かを判断する(ステップ160)。
前方の足が高い場合(ステップ160;Y)、制御装置2は、歩行シーンが下り階段の後進であると判定し(ステップ165)、メインルーチンにリターンする。
【0059】
前方の足が高くない場合、即ち、前方の足が低い場合(ステップ160;N)、制御装置2は、歩行シーンが上り階段の後進であると判定し(ステップ175)、メインルーチンにリターンする。
また、後方の足の足装着部24に前後傾斜がある場合(ステップ155;Y)、制御装置2は、後方の足のつま先姿勢センサ12、踵姿勢センサ13の検出値からつま先が踵よりも高いか否かを判断する(ステップ185)。
【0060】
つま先が踵よりも高い場合(ステップ185;Y)、制御装置2は、歩行シーンが下り坂道の後進であると判定し(ステップ190)、メインルーチンにリターンする。
つま先が踵よりも低い場合(ステップ185;N)、制御装置2は、歩行シーンが上り坂道の後進であると判定し(ステップ200)、メインルーチンにリターンする。
【0061】
以上のようにして、装着型ロボット1は、つま先、踵の接地の有無、及び、下肢の姿勢から装着者が平地、下り階段、上り階段、下り坂道、上り坂道の何れを後進歩行するのか、その歩行シーンを判定することができる。
【0062】
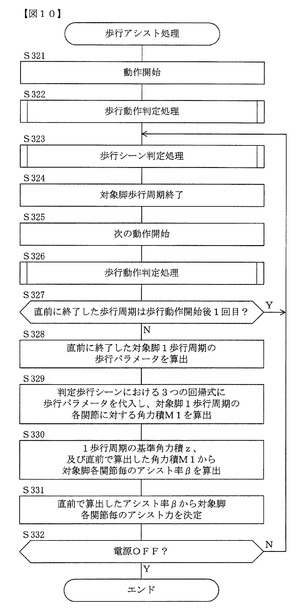
次に、以上説明した歩行動作判定処理と、歩行シーン判定処理をサブルーチンとする、歩行アシスト処理について説明する。
図10は、歩行アシスト処理の動作を示したフローチャートである。
制御装置2は、歩行支援装置の装着後に電源がオンされることで動作開始する(ステップ321)。
そして、図7で説明した歩行動作判定処理を行い(ステップ322)、歩行動作であると判定されると(ステップ313;Y)、制御装置2は、図8、9で説明した歩行シーン判定処理を行い(ステップ323)、装着者の歩行に対応する歩行シーン判定し、これを取得する。
【0063】
歩行シーン判定処理の間又は後において、制御装置2は、反力センサ10、11と姿勢センサ12〜16の検出値から、装着者が、対象脚による歩行周期を終了(ステップ324)し、更に、次の動作を開始(ステップ325)したことを検出する。
すると、制御装置2は、次に開始した動作(ステップ325)が、歩行動作可否かを再度判定する(ステップ326)。
なお、歩行アシスト処理は、左右の脚各々に対して個別に行われるため、ステップ324で右脚の歩行周期が終了した場合、ステップ325における次の動作に対する歩行判定処理も右脚に対して行われる。以後の処理も同じである。
【0064】
ステップ326の歩行動作判定処理で歩行動作と判定(ステップ313)されると、制御装置2は、直前で終了した歩行周期(ステップ324)は、歩行動作開始後1回目の歩行周期か否かを判定する(ステップ327)。
これは、本実施形態における歩行アシスト処理は、重複歩における1歩行周期前の歩行パラメータ値から、次の重複歩に対するアシスト力を決定するものであるが、1回目の歩行周期からは正確な歩行パラメータを取得できないためである。例えば、起立状態から右脚を出して歩きはじめた場合、1回目の歩行周期で得られる歩行パラメータ値は通常の1/2程度になり、この値についても1回目の歩行周期に歩行を開始するための動きが入るため正確な値とならいこと、などによる。
なお、最初の1歩行周期における動作や、2回目の歩行周における歩行動作に対して、制御装置2は、デフォルトのアシスト率αを使用して各関節に対するアシスト力を決定する。
【0065】
そこで、歩行動作開始後1回目の歩行周期であると判断した場合(ステップ327;Y)、制御装置2は、ステップ323に戻り次の1歩行周期について処理する。
一方、1回目の歩行周期でないと判断した場合(ステップ327;N)、すなわち、2回目以降の1歩行周期である場合、制御装置2は、直前に終了した対象脚の1歩行周期の歩行パラメータ値を算出する(ステップ328)。
すなわち制御装置2は、ステップ324で終了した1歩行周期の間に取得した各反力センサ10、11、姿勢センサ12〜16の検出値から、当該1歩行周期における歩行パラメータ値として重複歩距離yと重複歩調xを算出する。
例えば、制御装置2は、踵の接地から次の接地までの時間を測定し、1歩行周期が2秒と測定された場合、重複歩調xはx=60/2=30(重複歩数/分)と算出される。
【0066】
また、制御装置2は、例えば対象となっている脚を右脚とすると、1歩行周期における左脚1歩の距離(歩幅)と、次の右脚1歩の距離を、左右の各1歩において、両足が接地している状態での姿勢センサ12〜16の検出値から各関節の角度を算出する。そして、制御装置2は、算出した左右各1歩における各関節の角度と、各関節間の距離、足首関節と足裏間の距離、及び足の長さ(反力センサ10、11間の距離)とから、当該1歩行周期における重複歩距離yを算出する。
具体的には、左脚を前に出した図2の状態における、右脚のつま先反力センサ10から左脚のつま先反力センサ10までの距離(左脚1歩の幅)と、次に右脚を出した状態における左右のつま先センサが接地を検出している状態での距離(右脚1歩の幅)の合計を、両状態における各関節の角度と、各関節間の距離等から算出し、重複歩距離yとする。
なお、左右同時に接地する状態を確実に把握できるつま先反力センサ10の接地を使用しているが、足の長さ(つま先反力センサ10と踵反力センサ11間の距離)は一定であるので、重複歩距離yを算出できる。
【0067】
次に制御装置2は、ステップ323で判定した歩行シーンに対して、予め記憶部7に記憶しておいた股関節、膝関節、及び足首関節に対する3つの回帰式を読み出し、その変数X、Yに、ステップ328で算出した歩行パラメータ値(重複歩距離y、重複歩調x)を代入することで、対象となっている対象脚1歩行周期の角力積M1を各関節毎に算出する(ステップ329)。
この算出した各関節の角力積は、ステップ325、326で判定された次の重複歩に対して必要な全角力積(アシストしない場合の角力積)である。
【0068】
次に制御装置2は、記憶部7に記憶してある1歩行周期の基準角力積z、及び、ステップ329で算出した角力積M1から、対象となっている対象脚における各関節毎のアシスト率βを算出する(ステップ330)。
ここでアシスト率βは、ある歩行1歩行周期の角力積をM1、基準歩行1歩行周期の角力積をM2、基準歩行のアシスト率をαとした場合、次の式で算出される。
【0069】
アシスト率β={{M1−M2×(1−α×0.01)}/M1}×100(%)
【0070】
そして、基準歩行のアシスト時に装着者が負担する角力積が基準角力積zであり、基準角力積z=M2×(1−α×0.01)であるから、ある1歩行周期に対するアシスト率βは次の通りになる。
【0071】
アシスト率β={(M1−z)/M1}×100(%)
【0072】
次に制御装置2は、算出した各関節毎のアシスト率βから、対象脚の各関節毎のアシスト力(=関節モーメント×アシスト率β)を決定し、決定したアシスト力に従って、対象となっている対象
脚の股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19を駆動する(ステップ331)。
【0073】
制御装置2は、歩行支援装置の電源がオフされたか判断し(ステップ332)、オフでないと判断した場合(ステップ332;N)ステップ323に戻って歩行支援を継続し、オフと判断した場合(ステップ332;Y)、歩行支援処理を終了する。
【0074】
以上説明したように本実施形態の歩行支援装置によれば、1歩行周期の間における装着者の負担量として角力積に着目し、歩行状態(歩行パラメータの値)が変化したとしても、装着者の1歩行周期における角力積が一定の値(基準角力積)となるように各関節のアシストを行う構成としたので、装着者は歩行状態が変化したとしても同じ角力積の負担感で歩行することができる。
【0075】
以上、本発明の歩行支援装置における1実施形態について説明したが、本発明は説明した実施形態に限定されるものではなく、各請求項に記載した範囲において各種の変形を行うことが可能である。
例えば、説明した実施形態では、1歩行周期における角力積が最小値になる歩き方(歩行状態)、すなわち、導出した回帰式において、最適解(最小の角力積)を導く歩行パラメータ値を持つ歩行状態を基準歩行と定義したが、他の歩行状態を基準歩行と定義してもよい。
例えば、装着者の歩行において頻度が最も高い歩行パラメータ値での歩行を基準歩行としてもよい。この場合、直前の所定時間(例えば、30分)における歩行で最も多かった歩行パラメータ値を求め基準歩行としたり、前日の歩行において最も多かった歩行パラメータ値を求めて基準歩行としてもよい。
または、装着者が歩行支援装置を付けた状態で、予め各歩行シーン毎の歩行を自由にしてもらい、各歩行周期に対する歩行パラメータ値を測定し、その歩行シーンの中で一番多かった(歩行時間の長かった)歩行パラメータ値を決定し、当該歩行パラメータ値での歩行を基準歩行としてもよい。この場合、歩行支援装置では歩行支援無しの状態で測定してもよく、所定アシスト率での歩行支援をしながら測定するようにしてもよい。
【0076】
また説明した実施形態によれば、歩行パラメータを変数とし1歩行周期における角力積を解とする回帰式を歩行データから導出し、この回帰式を使用して、実際に歩行している際の歩行パラメータ値に対する角力積を算出する場合について説明した。
これに対して、詳細な歩行データを測定することで、歩行パラメータ−角力積対応テーブルを作成、及び記憶しておき、この対応テーブルを使用することで、実際の歩行時に算出した歩行パラメータ値に対応する角力積を取得するようにしてもよい。
この場合、実際の歩行時に算出した歩行パラメータ値がテーブルに無い場合には、対応テーブルに存在する最も近い値を使用して角力積を決定する。
また、この場合、基準歩行の角力積は別途導出した回帰式を使用して決定しても良く、回帰式自体を作成しない場合には、上記対応テーブルにおいて最も小さい値の角力積を基準歩行の角力積としてもよい。
【0077】
歩行パラメータとして、重複歩距離Yと重複歩調Xを使用したが、他のパラメータを使用するようにしてもよい。
例えば、重複歩調Xに変えて1歩行周期Q(秒)を使用してもよい。
また、重複歩距離Yと重複歩調X(又は1歩調周期Q)に加え、床反力を歩行パラメータとしてもよい。
更に、両足が接地している場合の高さの差や、つま先関節の角度を歩行パラメータとして追加することで、歩行シーンの判定を不要にするようにしてもよい。
【0078】
また説明した実施形態では、角力積、基準角力積を使用してアシスト率βを決定したが、この角力積、基準角力積に変えて、角力積/体重、基準角力積/体重を使用するようにしてもよい。
【0079】
また説明した実施形態では、歩行動作を開始してから1回目の1歩行周期からは歩行パラメータを算出せず(ステップ327;Y)、2回目以降の1歩行周期から歩行パラメータを算出する場合について説明した。すなわち、2回目以降の1歩行周期から歩行パラメータを算出し、3回目以降の1歩行周期における歩行動作に対してアシストを行うことになる。
これに対して、歩行動作開始後1回目の1歩行周期から歩行パラメータを算出するようにしてもよい。この場合ステップ327の判断処理は不要である。
そして、対象脚による1回めの1歩行周期が、歩行開始の最初の動作である場合、すなわち、対象脚側から歩行動作を開始した場合には、当該1歩行周期から算出した重複歩距離の値と重複歩調の値を2倍した値を1歩行周期の歩行パラメータとして算出する(ステップ328)。
一方、対象脚による1回目の1歩行周期が、歩行開始の最初の動作でない場合、すなわち、対象脚の反対側の脚から歩行動作を開始した場合には、当該1歩行周期から算出した重複歩距離の値と重複歩調の値を1歩行周期の歩行パラメータとして算出する(ステップ328)。
この変形例により、1回目の1歩行周期から算出される歩行パラメータを使用して、2回目の1歩行周期における重複歩に対するアシストを行うことができる。
なお、この場合においても、1回目の1歩行周期の歩行動作に対してはデフォルトのアシスト率を使用したアシストを行う。
【符号の説明】
【0080】
1 装着型ロボット
2 制御装置
3 センサ情報取得部
4 各種パラメータ算出部
5 歩行動作判定部
6 歩行シーン判定部
7 記憶部
8 歩行アシスト力決定部
10 つま先反力センサ
11 踵反力センサ
12 つま先姿勢センサ
13 踵姿勢センサ
14 腰姿勢センサ
15 上腿姿勢センサ
16 下腿姿勢センサ
17 股関節アシストアクチュエータ
18 膝関節アシストアクチュエータ
19 足首関節アシストアクチュエータ
21 腰部装着部
22 上腿装着部
23 下腿装着部
24 足装着部
26 上腿連結部材
27 下腿連結部材
【技術分野】
【0001】
本発明は、歩行支援装置、及び歩行支援プログラムに関し、例えば、歩行をアシストするものに関する。
【背景技術】
【0002】
近年、介護ビジネスなどを中心に、人の動作(歩行や持ち上げなど)に使われる筋力を補助する装着型ロボット(パワーアシストスーツ)などが開発されている。
装着型ロボットには、アシスト箇所として、上半身の筋力を補助するもの、下半身の筋力を補助するもの、あるいは、全身の筋力を補助するものなど各種のものがある。
また、装着型ロボットの用途も、健常者用から高齢者・障害者の補助用などがある。
【0003】
装着型ロボットは、例えば、装着者の筋電から筋肉の動きを解析したり、関節各部に配置した姿勢センサで検出される装着者の動きを解析することで、当該動きに必要な関節モーメントを算出し、これに応じた必要なアシスト力を発生させている。これによって、装着者は、重量物の持ち上げや歩行を楽に行うことができる。
【0004】
このような技術に、特許文献1の「装着式動作補助装置、装着式動作補助装置の制御方法および制御用プログラム」がある。
この技術は、装着者に設置したセンサによって生体信号を検出し、これを用いて装着者の意思に従った動力をアクチュエータに発生させるものである。
【0005】
しかし、従来の装着型ロボットは、装着者の関節に発生する関節モーメントに対して一定の割合でアシスト力を発生させるものであり、各歩行シーン(平地、階段、坂道等)や各歩行パラメータ値(歩幅、歩調等)の違いに応じたアシストを行っている訳ではない。
このため、同一割合でのアシストをしたとしても、装着者にとってみると、歩行シーンや歩き方の違い(歩行パラメータ値の違い)によっては、アシスト力不足と感じる場合がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−95561号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、歩き方が異なる場合であっても、一定の負担感での歩行支援を行うことを目的とする。
【課題を解決するための手段】
【0008】
(1)請求項1に記載の発明では、1歩行周期の歩行に対して必要な角力積のうち、歩行支援対象者の負担分である基準角力積zを記憶する基準角力積記憶手段と、歩行中の前記歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得手段と、前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出手段と、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が前記基準角力積zとなるように、アシスト力を決定するアシスト力決定手段と、前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援手段と、を具備することを特徴とする歩行支援装置を提供する。
(2)請求項2記載の発明では、1歩行周期に対する重複歩距離と、重複歩調を前記歩行パラメータとし、前記歩行パラメータ値取得手段は、1歩行周期に対する重複歩距離と重複歩調の値を歩行パラメータの値として取得する、ことを特徴とする請求項1に記載の歩行支援装置を提供する。
(3)請求項3記載の発明では、歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を記憶する回帰式記憶手段を備え、前記回帰式における最適解を導く歩行パラメータの値による歩行を基準歩行として、当該基準歩行において前記歩行支援対象者が負担すべき1歩行周期の角力積を基準角力積とし、前記角力積M1は、前記取得した歩行パラメータの値を前記回帰式に代入することで算出する、ことを特徴とする請求項1、又は請求項2に記載の歩行支援装置を提供する。
(4)請求項4記載の発明では、前記回帰式記憶手段は、種々の各歩行状態で歩行することで計測される1歩行周期に対する各歩行パラメータの値と角力積とを歩行データとし、当該歩行データから応答曲面法又は重回帰分析により導出した回帰式を記憶する、ことを特徴とする請求項3に記載の歩行支援装置を提供する。
(5)請求項5記載の発明では、前記歩行パラメータ値取得手段は、左右の脚のいずれか一方を対象脚とした場合に、当該対象脚の1歩行周期毎の歩行パラメータを取得し、前記角力積算出手段は、前記取得した各1歩行周期の歩行パラメータ毎に前記対象脚の角力積M1を算出し、前記アシスト力決定手段は、1つ前の1歩行周期に対して算出された前記対象脚の角力積M1から、前記対象脚に対する次の1歩行周期のアシスト力を決定する、ことを特徴とする請求項1から請求項4のうちのいずれか1の請求項に記載の歩行支援装置を提供する。
(6)請求項6記載の発明では、歩行支援対象者が歩行する歩行面の種類を判定する歩行面判定手段を備え、前記基準角力積記憶手段は、各歩行面の種類毎に基準角力積zを記憶し、前記角力積算出手段は、前記取得した歩行パラメータの値と前記判定した歩行面の種類から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出し、前記アシスト力決定手段は、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、前記判定した歩行面の種類に対応して記憶した前記基準角力積zとなるように、アシスト力を決定する、ことを特徴とする請求項1から請求項5に記載の歩行支援装置を提供する。
(7)請求項7記載の発明では、歩行中の歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得機能と、前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出機能と、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、1歩行周期の歩行に対して必要な角力積のうち前記歩行支援対象者の負担分である基準角力積zとなるように、アシスト力を決定するアシスト力決定機能と、前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援機能と、をコンピュータに実現させる歩行支援プログラムを提供する。
【発明の効果】
【0009】
本発明によれば、歩き方が異なる場合であっても必要なアシスト力で歩行支援を行うことで、歩行支援対象者は一定の角力積負担感で歩行することができる。
【図面の簡単な説明】
【0010】
【図1】平地を2種類の歩行状態で歩行した場合の、1歩行周期における時間と関節モーメントとの関係を表した説明図である。
【図2】装着型ロボットの装着状態を示した図である。
【図3】装着型ロボットのシステム構成を示した図である。
【図4】歩行支援装置における事前処理の動作を表したフローチャートである。
【図5】事前処理において使用する歩行データの説明図である。
【図6】歩行データから求めた回帰式を3次元で表したグラフである。
【図7】歩行動作判定処理について表したフローチャートである。
【図8】制御部が歩行支援を行う手順を説明するためのフローチャートである。
【図9】後方移動処理を説明するためのフローチャートである。
【図10】歩行アシスト処理の動作を示したフローチャートである。
【発明を実施するための形態】
【0011】
(1)実施形態の概要
装着型ロボット1(図2)は、装着者(歩行支援対象者)の筋電から筋肉の動きを解析したり、関節各部に配置した姿勢センサで検出される装着者の動きを解析することで、当該動きに必要な関節モーメントを算出し、これに応じた必要なアシスト力を発生させることで各関節の動作を支援する。例えば、股関節アシストアクチュエータ17で股関節の動作を支援し、膝関節アシストアクチュエータ18で膝関節の動作を支援し、足首関節アシストアクチュエータ19で足首関節の動作を支援する。
即ち装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。
【0012】
一般に人が歩行する場合、歩幅や歩調などの歩行状態によって各関節に必要とされる関節モーメントは異なっている。例えば、一番楽な歩き方を基準とした場合の各関節モーメントに比べて、歩幅を広くしたり、早足で歩いたりした場合の各関節モーメントの方が大きくなる。
従って、この各関節モーメントに対して一律50%のアシストをしたとしても、装着者が負担すべき関節モーメントや力が変化してしまうことになる。
【0013】
そこで、本実施形態では、1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。
すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積(=基準歩行で装着者が負担する角力積)を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積(負担角力積)が基準角力積zと均しくなるようにアシスト率βを設定する。
これにより歩行パラメータの値が変わったとしても、人が出力する力(負担角力積)を意識することなく一定の基準角力積zによる負担感で歩くことが可能になる。
なお、アシスト率とは歩行に必要な力に対するアシスト力の割合(単位:%)をいう。
【0014】
図1は、平地を2種類の歩行状態で歩行した場合の、1歩行周期における時間と関節モーメントとの関係を表したものである。
図1において、実線は1歩行周期における特定の関節の関節モーメントを表している。一方、点線はアシストにより装着者が負担する関節モーメントであり、その絶対値を1歩行周期に渡って時間積分したものが角力積であり、図中の斜線で表した部分の合計面積がこれに相当する。
【0015】
なお、1歩行周期は、左右どちらかの足が接地してから、同じ側の足が次に着地するまでの動作(これを「重複歩」という)に要する時間であり、足が接地している立脚相(前半約60%)と離地している遊脚相(後半約40%)とに分けられ、両相に応じてモーメントの方向が逆になっている。
【0016】
そして、1歩行周期における角力積が最小値になる歩き方(歩行状態)を基準歩行と定義する。そして、基準歩行における関節モーメントの変化が図1(a)の実線で示され、この実線部分の面積が無アシストによる角力積の最小値であり、この値が20(Nms)であったものとする。
この基準歩行に対して、アシスト率α=50%のアシストを行う場合、装着者は図1(a)の斜線で示す合計10Nmsの角力積(=基準角力積z)を負担すればよいことになる。
【0017】
一方、図1(b)の実線は、基準歩行と異なる歩き方(歩行状態)で実際に行われた1歩行周期の歩行に対する、関節モーメントの変化を表したものである。
本実施形態では、基準歩行以外の歩行に対しても、図1(b)の斜線で示すように、装着者が負担する角力積(負担角力積)が、基準角力積z=10Nmsと同じに成るように、アシスト率βを決定し、当該アシスト率βで該当する関節のアシストを行う。
【0018】
本実施形態では、歩き方(歩行状態)を特定するためのパラメータを歩行パラメータとし、重複歩調と重複歩距離を使用する。そして、種々の各歩行状態で歩いた場合の、歩行パラメータ値に対する角力積(関節モーメントから算出)を歩行データとして予め計測する。
この歩行データに対して応答曲面法や重回帰分析等を用いて、歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を導出しておく。この回帰式は、各歩行シーン(歩行面種類(平地、上り坂道、下り坂道、上り階段、下り階段)5種類×進行方向(前方、後方)2種類=10シーン)に対して、右脚用、左脚用の各関節(股関節、膝関節、足首関節)分だけ、すなわち、10×2×3=60導出する。
導出した各回帰式において、最適解(最小の角力積)を導く歩行パラメータの値を持つ歩行状態を基準歩行とする。
【0019】
そして、実際に歩行が開始されると、1歩行周期前の歩行パラメータ値に対する角力積M1を回帰式から求め、次の1歩行周期も直前の歩行周期と同じ歩行パラメータ値であると仮定し、次の重複歩に対する負担角力積が基準角力積zと均しくなるようにアシスト率βを決定し、次の重複歩に対してアシスト率βのアシストを行う。
図1(a)(b)に示した例で説明すると、歩行パラメータ値と回帰式から求めた角力積M1が30Nmsで、基準角力積zが10Nmsなので、20Nms(=30−10)を歩行支援装置でアシストすることで、負担角力積=基準角力積zとなる。
従って、アシスト率β={(M1−z)/M1}×100=66%(=(20/30)×100)が求まるので、次の重複歩行に対して、関節モーメントの66%をアシストすることで、装着者は常時一定の角力積負担感で歩行することができる。
【0020】
(2)実施形態の詳細
図2は装着型ロボット1の装着状態を示した図である。
装着型ロボット1は、装着者の腰部及び下肢に装着し、装着者の歩行を支援(アシスト)するものである。
装着型ロボット1は、腰部装着部21、上腿装着部22、下腿装着部23、足装着部24、上腿連結部材26、下腿連結部材27、制御装置2、つま先反力センサ10、踵反力センサ11、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、上腿姿勢センサ15、下腿姿勢センサ16、股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19などを備えている。なお、腰部装着部21、制御装置2、腰姿勢センサ14以外は、左右の両足に設けられており、それぞれの検出値が出力されるようになっている。
但し、つま先反力センサ10、踵反力センサ11については、反力の検出が不要である実施例の場合には、両センサに変えてつま先接地センサ、踵接地センサを備えるようにしてもよい。
【0021】
腰部装着部21は、装着者の腰部の周囲に取り付けられ装着型ロボット1を固定する。
腰姿勢センサ14は、腰部装着部21に取り付けられ、ジャイロなどによって腰部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、腰部の角速度や角加速度を求めることもできる。
【0022】
制御装置2は、腰部装着部21に取り付けられ、装着型ロボット1の動作を制御する。
股関節アシストアクチュエータ17は、装着者の股関節と同じ高さに設けられており、腰部装着部21に対して上腿連結部材26を前後方向に駆動する。なお、股関節アシストアクチュエータ17を3軸アクチュエータとして横方向にも駆動するように構成することもできる。
【0023】
上腿連結部材26は、装着者の上腿部の外側に設けられた剛性を有する柱状部材であり、股関節アシストアクチュエータ17と膝関節アシストアクチュエータ18を連結する。
上腿装着部22は、外側が上腿連結部材26の内側に固定されており、内側が装着者の上腿に固定される。
上腿姿勢センサ15は、上腿部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、上腿部の角速度や角加速度を求めることもできる。
【0024】
膝関節アシストアクチュエータ18は、装着者の膝関節と同じ高さに設けられており、上腿連結部材26に対して下腿連結部材27を前後方向に駆動する。
下腿連結部材27は、装着者の下腿部の外側に設けられた剛性を有する柱状部材であり、膝関節アシストアクチュエータ18と足首関節アシストアクチュエータ19を連結する。
【0025】
下腿装着部23は、外側が下腿連結部材27の内側に固定されており、内側が装着者の下腿に固定される。
下腿姿勢センサ16は、下腿部の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、下腿部の角速度や角加速度を求めることもできる。
【0026】
足首関節アシストアクチュエータ19は、装着者の足首関節と同じ高さに設けられており、下腿連結部材27に対して足装着部24のつま先を上下する方向に駆動する。
足装着部24は、装着者の足部(足の甲、及び足裏)に固定される。一般に、足指の付け根の関節は歩行の際に屈曲するが、足装着部24も足指の付け根の部分が足指に従って屈曲するようになっている。
【0027】
つま先姿勢センサ12と踵姿勢センサ13は、それぞれ、足装着部24の先端と後端に設置され、それぞれ、つま先と踵の姿勢(ロール角、ヨー角、ピッチ角)を検出する。また、これらの角度を微分することにより、つま先や踵の角速度や角加速度を求めることもできる。
【0028】
つま先反力センサ10は、足装着部24の足裏部前方に設置され、つま先の接地を検出すると共に、歩行面からの反力を検出する。
踵反力センサ11は、足装着部24の足裏部後方に設置され、踵の接地を検出すると共に、歩行面からの反力を検出する。
以上のように構成された装着型ロボット1は、股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19を駆動することにより、装着者の歩行を支援する。
【0029】
図3は、装着型ロボット1のシステム構成を示した図である。
制御装置2は、図示しないCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、時間を計測する手段としての時計、記憶部7、各種インターフェースなどを備えた電子制御ユニットであり、装着型ロボット1の各部を電子制御する。
【0030】
制御装置2は、また、CPUで記憶部7に記憶された歩行支援プログラム等の各種プログラムを実行することにより構成される、センサ情報取得部3、各種パラメータ算出部4、歩行動作判定部5、歩行シーン判定部6、歩行アシスト力決定部8を備えている。
センサ情報取得部3は、つま先反力センサ10〜下腿姿勢センサ16の各センサから検出値を取得する。センサ情報取得部3で取得した各センサの検出値は、歩行動作の判定(図7)や、歩行シーンの判定(図8、図9)や、歩行パラメータの算出(図10)等に使用される。
【0031】
各種パラメータ算出部4は、センサ情報取得部3で取得した検出値から、各関節の角度や位置を求めることで歩行パラメータ値(重複歩調と重複歩距離)を算出する。
ここで、1側の踵が接地してから次に同側の踵が接地するまでの動作を重複歩といい、この重複歩における一連の動作を歩行周期という。そして、重複歩における踵の両接地点間の距離を重複歩距離といい、1分間当たりの重複歩数(重複歩数/分)を重複歩調という。
【0032】
歩行動作判定部5は、装着者の動作が屈伸運動や足踏み動作などの歩行以外の動作なのか、それとも実際に歩行している動作なのかを判定する。
歩行シーン判定部6は、センサ情報取得部3で取得した検出値から、装着者の歩行している歩行シーンを判定する。判定対象となる歩行シーンとしては、歩行面種類(平地、上り階段、下り階段、上り坂道、下り坂道)の5種類のそれぞれに対して、前進歩行と後進歩行の歩行方向2種類があり、合計10の歩行シーンがある。
【0033】
歩行アシスト力決定部8は、左右両足のそれぞれに配置されている股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19に出力させるアシスト力を決定し、これに従ってこれらアシストアクチュエータを駆動する。なお、アシスト力とは、装着型ロボット1がアシストアクチュエータを駆動して脚部に作用させるモーメント(トルク)である。
【0034】
次に、以上のように構成された歩行支援装置における各種処理、動作について説明する。
図4は、歩行支援装置における事前処理の動作を表したものである。
この処理は、上述した10種類の各歩行シーンにおける、左右両足の各関節に対する基準角力積zと回帰式を求める処理である。この事前処理は、歩行支援装置毎に行われるものではなく、各装着者に共通する処理であるため、歩行データに併せて適宜行う処理である。この状態では歩行支援装置の制御装置2で行うものとして説明するが、他の制御装置で事前処理を行うことで得られた基準角力積zと回帰式を、個々の歩行支援装置に記憶及び使用するようにしてもよい。
【0035】
まず、事前処理において制御装置2は、事前に計測した各歩行パラメータ値毎の歩行データを取得する(ステップ301)。
図5は、取得する歩行データについて表したものである。
この図5に示すように、歩行データは、種々の歩行パラメータ値(重複歩調、重複歩距離)で歩行した場合の、膝関節に対する角力積の値である。図5の例では、1分間の重複歩数30の重複歩調(歩行テンポ)で、重複歩距離1.0mで歩いた場合における1歩行周期の角力積が18.3275(Nms)と計測されている。
【0036】
各歩行パラメータ値に対する角力積の値は次のようにして測定及び算出する。
すなわち、各関節やつま先、踵などの所定箇所にマーカーを付けた被験者に、各歩行パラメータ値に対応した歩行、例えば、重複歩調30(重複歩数/min)、重複歩距離1.0mでの歩行をしてもらい、これを複数台のカメラで撮影する。
この画像から、そして、マーカーの動きを解析することで、図1に示すように、各関節に対する関節モーメントの変化を求め、そして、1歩行周期の関節モーメントを時間積分することで1歩行周期の角力積が求まる。
なお、各歩行パラメータ値に従った歩行を被験者にしてもらうのではなく、被験者に色々なパターンの歩行を自由に行ってもらい、その時のマーカーの動きから歩行パラメータ値と、関節モーメントの変化を求めることで、各歩行パラメータ値に対応した1歩行周期の角力積(歩行データ)を求めるようにしてもよい。
【0037】
図4に戻り、制御装置2は、取得した歩行データと応答曲面法を用いて、歩行パラメータ値を変数として1歩行周期の角力積を解とする回帰式Zを導出する(ステップ302)。
歩行データから回帰式を求めることで、あらゆる歩行パラメータの値における角力積の測定を詳細に測定することなく、後述する基準歩行や基準角力積z(後述)を求めたり、歩行支援において検出された歩行パラメータ値に対する角力積を求めることができる。
一例として、応答曲面法を用いて、図5に例示した膝関節に対する歩行データから求めた回帰式Z(膝)は、次数式のようになる。
なお、数式において、パラメータXは重複歩調を、Yは重複歩距離を表す。また数式において@2は、その前の数式/数値の平方を表すものとする。
【0038】
Z(膝)=−0.149×X
+7.771×Y
+0.825×(X−42.7594)×(Y−1.1174)
+0.015×(X−42.7594)@2
+20.218×(Y−1.1174)@2
+11.070
【0039】
図6は、図5の歩行データから求めた膝関節に対する上記回帰式Z(膝)を3次元のグラフで可視化したものである。
この図6に示すように、回帰式Zにより、歩行支援において検出した歩行パラメータ値の重複歩調の値をX軸に、重複歩距離の値をY軸に当てはめることで、Z軸の値から当該方向パラメータ値で歩行した場合に必要な角力積(アシスト無し)が求まる。
【0040】
次に制御装置2は、算出した回帰式Zから、基準歩行と、その1歩行周期の角力積を算出する(ステップ303)。
すなわち、算出した回帰式Zにおいて、最適解(最小の角力積)を導く歩行パラメータ値を持つ歩行を基準歩行とし、この基準歩行における1歩行周期の角力積を算出する。
上記した図5の歩行データから導いた回帰式Z(膝)の場合、歩行パラメータ値が重複歩調51(重複歩数/分)、重複歩調 1.0(m) のときが基準歩行で、その時の角力積(最小値)は11.7411(Nms)である。
【0041】
そして制御装置2は、基準歩行でのアシスト率αを決定する(ステップ304)。
なお、このアシスト率はデフォルトの値であり、歩行支援装置の装着者が各自調節(増減)することができるようにしてもよい。
【0042】
次に制御装置2は、基準歩行に対する基準角力積zと回帰式を記憶部7に記憶し(ステップ305)、処理を終了する。
ここで基準角力積zは、基準歩行における1歩行周期の角力積M2に(1−アシスト率α×0.01)を乗じた値であり、基準歩行における1歩行周期の角力積M2から、歩行支援装置でアシストする角力積(M2×α×0.01)を除いた角力積(=基準歩行で装着者が負担する角力積)である。すなわち、z=M2×(1−α×0.01)である。
なお、ステップ305で記憶する基準角力積zと回帰式は、上記した10の歩行シーン毎、左右の脚毎、更に、各関節(股関節、膝関節、足首関節)毎に、算出され記憶される。すなわち、合計で10×2×3=60の基準角力積zと回帰式が記憶部7に記憶される。
【0043】
次に、実際の歩行支援装置を装着した後の歩行支援処理について説明する。
この歩行支援処理は、右脚と左脚のそれぞれに対して別々に処理及び制御が行われる。以下の説明では、処理及び制御の対象となっている側の脚を対象脚として説明する。
この歩行支援処理においては、サブルーチンとして歩行動作判定処理、及び歩行シーン判定処理が行われるので、先に両処理について説明する。
この歩行動作判定処理は、歩行動作判定部5の処理として制御装置2が実行するものであり、装着者の動作が屈伸運動や足踏み動作などの歩行以外の動作なのか、それとも実際に歩行している動作なのかを判定する処理である。
【0044】
図7は、歩行動作判定処理について表したフローチャートである。
制御装置2は、センサ情報取得部3から歩行動作判定用のパラメータ値を取得する(ステップ311)。なお、歩行動作判定処理は、歩行支援装置を装着し電源をオンした時点から継続的に行われており、取得するパラメータ値も継続的に取得している。
【0045】
そして、制御装置2は、取得するパラメータ値から歩行動作判定を行う(ステップ312)。
この歩行動作判定では、各センサの出力値(パラメータ値)から、装着者が動いていない場合や、動いた場合でも例えば屈伸運動をしただけの場合、片側の足を上げ下げしただけの場合、その場での足踏みをした場合などの歩行以外の動きと、実際の歩行動作とを区別して判定するものである。
具体的には、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、浮上した足の上腿姿勢センサ15、下腿姿勢センサ16、(以下、姿勢センサ12〜16と略記する)の検出値から各関節の角度を計算して足の浮上を検出し、その後、つま先反力センサ10、踵反力センサ11(以下、反力センサ10、11と略記する)の出力値から同側の足が前方又は後方に接地したと判断した場合に歩行動作と判断する。
【0046】
なお、歩行動作か否かの判定については、反力センサ10、11と姿勢センサ12〜16の検出値から計算される足の動きから、立脚相と遊脚相が判定された場合に歩行動作と判定するようにしてもよい。
【0047】
歩行動作判定(ステップ312)の結果、歩行動作ではないと判定した場合(ステップ313;N)、制御装置2は、現在設定されているアシスト率がデフォルトのアシスト率か否かを判断する(ステップ314)。
デフォルトのアシスト率であれば(ステップ314;Y)、制御装置2は、アシスト率を変更することなくステップ311に戻って、歩行動作の監視、判定を継続する。
一方、デフォルトのアシスト率ではない場合(ステップ314;N)、制御装置2は、現在設定されているアシスト率をデフォルトのアシスト率に変更し(ステップ315)、その後ステップ311に戻って歩行動作の監視、判定を継続する。
ステップ312で行った歩行動作判定において歩行動作と判定された場合(ステップ313;Y)、制御装置2はメインルーチン(図10)にリターンする。
【0048】
次に、歩行シーン判定処理について図8、9を参照して説明する。
この歩行シーン判定処理では、歩行面種類(平地、上り階段、下り階段、上り坂道、下り坂道)5種類に対して進行方向(前方、後方)2種類、合計10種類の歩行シーンのうちの何れの歩行シーンであるのかを判定する。
図8は、装着者が歩行周期を開始した場合に、制御装置2が歩行支援を行う手順を説明するためのフローチャートである。
まず、装着者が歩行周期を開始すると、制御装置2は、つま先反力センサ10、踵反力センサ11からの検出値によって、足装着部24が歩行面から離れたことを検出し、片足が浮上したと判断する(ステップ5)。
【0049】
次に、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、浮上した足の上腿姿勢センサ15、下腿姿勢センサ16、(以下、つま先姿勢センサ12、踵姿勢センサ13、腰姿勢センサ14、上腿姿勢センサ15、下腿姿勢センサ16を姿勢センサと略記する)の検出値から各関節の角度を計算し、浮上した足の移動方向を検出する(ステップ10)。
次に、制御装置2は、浮上した足が前方方向に移動しているか否かを判断する(ステップ15)。
浮上した足が前方方向に移動していると判断した場合(ステップ15;Y)、制御装置2は、装着者が前方移動すると判断する(ステップ20)。
一方、前方方向に移動していないと判断した場合(ステップ15;N)、制御装置2は、後述の後方移動処理を行う(ステップ110)。
【0050】
制御装置2は、前方移動と判断した場合(ステップ20)、前方の足のつま先反力センサ10、踵反力センサ11からの検出値により、前方の足が歩行面に接地したか否かを判断する(ステップ25)。
前方の足が歩行面に接地していないと判断した場合(ステップ25;N)、制御装置2は、ステップ25にて前方の足が歩行面に接地したか否かの監視を継続し、前方の足が歩行面に接地したと判断した場合(ステップ25;Y)、制御装置2は、両足の姿勢センサの出力から両足の各関節の角度を算出し、これによって前後の足の高さを測定する(ステップ30)。
なお、足の高さは、例えば、踵(踵姿勢センサ13)の高さや、足首関節(足首関節アシストアクチュエータ19)の高さなど、適当な部位の高さを用いることができる。
【0051】
次に、制御装置2は、前後の足の高さに違いがあるか否かを判断し(ステップ35)、違いがない場合(ステップ35;N)、制御装置2は、歩行シーンが平地の前進であると判定し(ステップ40)、メインルーチン(図10)にリターンする。
前後の足の高さに違いがある場合(ステップ35;Y)、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13の検出値により、前に出した足の足装着部24の前後傾斜を測定する(ステップ50)。
【0052】
次に、制御装置2は、前後傾斜があるか否かを判断し(ステップ55)、前後傾斜がない場合(ステップ55;N)、制御装置2は、姿勢センサの検出値から前方の足が後方の足より高いか否かを判断する(ステップ60)。
前方の足が高くない場合、即ち、前方の足が低い場合(ステップ60;N)、制御装置2は、歩行シーンが下り階段の前進であると判定し(ステップ65)、メインルーチンにリターンする。
【0053】
前方の足が後方の足よりも高い場合(ステップ60;Y)、制御装置2は、歩行シーンが上り階段の前進であると判定し(ステップ75)、メインルーチンにリターンする。
また、前に出した足の足装着部24に前後傾斜がある場合(ステップ55;Y)、制御装置2は、前方の足のつま先姿勢センサ12、踵姿勢センサ13の検出値からつま先が踵よりも低いか否かを判断する(ステップ85)。
【0054】
つま先が踵よりも低い場合(ステップ85;Y)、制御装置2は、歩行シーンが下り坂道の前進であると判定し(ステップ90)、メインルーチンにリターンする。
つま先が踵よりも低くない場合、即ち、踵がつま先よりも低い場合(ステップ85;N)、制御装置2は、歩行シーンが上り坂道の前進であると判定し(ステップ100)、メインルーチンにリターンする。
【0055】
以上のようにして、装着型ロボット1は、つま先、踵の接地の有無、及び、下肢の姿勢から装着者が平地、下り階段、上り階段、下り坂道、上り坂道の何れを前進歩行するのか、その歩行面の種類を判定することができる。
【0056】
図9は、ステップ110(図8)の後方移動処理を説明するためのフローチャートである。
制御装置2は、浮上した足が後方に移動する場合、後方移動であると判断する(ステップ120)。
次に、制御装置2は、つま先反力センサ10、踵反力センサ11の検出値により、後方の足が歩行面に接地したか否かを判断する(ステップ125)。
後方の足が歩行面に接地していない場合(ステップ125;N)、制御装置2は、ステップ125にて接地したか否かを監視する。
【0057】
後方の足が歩行面に接地した場合(ステップ125;Y)、制御装置2は、両足の姿勢センサの検出値により、両足の各関節の角度を計算し、これによって前後の足の高さを測定する(ステップ130)。
前後の足の高さに違いがない場合(ステップ135;N)、制御装置2は、歩行シーンが平地の後進であると判定し(ステップ140)、メインルーチン(図10)にリターンする。
【0058】
前後の足の高さに違いがある場合(ステップ135;Y)、制御装置2は、つま先姿勢センサ12、踵姿勢センサ13の検出値により、後方の足の足装着部24の前後傾斜を測定する(ステップ150)。
次に、制御装置2は、前後傾斜があるか否かを判定し(ステップ155)、前後傾斜がない場合(ステップ155;N)、制御装置2は、姿勢センサの検出値から前方の足が後方の足より高いか否かを判断する(ステップ160)。
前方の足が高い場合(ステップ160;Y)、制御装置2は、歩行シーンが下り階段の後進であると判定し(ステップ165)、メインルーチンにリターンする。
【0059】
前方の足が高くない場合、即ち、前方の足が低い場合(ステップ160;N)、制御装置2は、歩行シーンが上り階段の後進であると判定し(ステップ175)、メインルーチンにリターンする。
また、後方の足の足装着部24に前後傾斜がある場合(ステップ155;Y)、制御装置2は、後方の足のつま先姿勢センサ12、踵姿勢センサ13の検出値からつま先が踵よりも高いか否かを判断する(ステップ185)。
【0060】
つま先が踵よりも高い場合(ステップ185;Y)、制御装置2は、歩行シーンが下り坂道の後進であると判定し(ステップ190)、メインルーチンにリターンする。
つま先が踵よりも低い場合(ステップ185;N)、制御装置2は、歩行シーンが上り坂道の後進であると判定し(ステップ200)、メインルーチンにリターンする。
【0061】
以上のようにして、装着型ロボット1は、つま先、踵の接地の有無、及び、下肢の姿勢から装着者が平地、下り階段、上り階段、下り坂道、上り坂道の何れを後進歩行するのか、その歩行シーンを判定することができる。
【0062】
次に、以上説明した歩行動作判定処理と、歩行シーン判定処理をサブルーチンとする、歩行アシスト処理について説明する。
図10は、歩行アシスト処理の動作を示したフローチャートである。
制御装置2は、歩行支援装置の装着後に電源がオンされることで動作開始する(ステップ321)。
そして、図7で説明した歩行動作判定処理を行い(ステップ322)、歩行動作であると判定されると(ステップ313;Y)、制御装置2は、図8、9で説明した歩行シーン判定処理を行い(ステップ323)、装着者の歩行に対応する歩行シーン判定し、これを取得する。
【0063】
歩行シーン判定処理の間又は後において、制御装置2は、反力センサ10、11と姿勢センサ12〜16の検出値から、装着者が、対象脚による歩行周期を終了(ステップ324)し、更に、次の動作を開始(ステップ325)したことを検出する。
すると、制御装置2は、次に開始した動作(ステップ325)が、歩行動作可否かを再度判定する(ステップ326)。
なお、歩行アシスト処理は、左右の脚各々に対して個別に行われるため、ステップ324で右脚の歩行周期が終了した場合、ステップ325における次の動作に対する歩行判定処理も右脚に対して行われる。以後の処理も同じである。
【0064】
ステップ326の歩行動作判定処理で歩行動作と判定(ステップ313)されると、制御装置2は、直前で終了した歩行周期(ステップ324)は、歩行動作開始後1回目の歩行周期か否かを判定する(ステップ327)。
これは、本実施形態における歩行アシスト処理は、重複歩における1歩行周期前の歩行パラメータ値から、次の重複歩に対するアシスト力を決定するものであるが、1回目の歩行周期からは正確な歩行パラメータを取得できないためである。例えば、起立状態から右脚を出して歩きはじめた場合、1回目の歩行周期で得られる歩行パラメータ値は通常の1/2程度になり、この値についても1回目の歩行周期に歩行を開始するための動きが入るため正確な値とならいこと、などによる。
なお、最初の1歩行周期における動作や、2回目の歩行周における歩行動作に対して、制御装置2は、デフォルトのアシスト率αを使用して各関節に対するアシスト力を決定する。
【0065】
そこで、歩行動作開始後1回目の歩行周期であると判断した場合(ステップ327;Y)、制御装置2は、ステップ323に戻り次の1歩行周期について処理する。
一方、1回目の歩行周期でないと判断した場合(ステップ327;N)、すなわち、2回目以降の1歩行周期である場合、制御装置2は、直前に終了した対象脚の1歩行周期の歩行パラメータ値を算出する(ステップ328)。
すなわち制御装置2は、ステップ324で終了した1歩行周期の間に取得した各反力センサ10、11、姿勢センサ12〜16の検出値から、当該1歩行周期における歩行パラメータ値として重複歩距離yと重複歩調xを算出する。
例えば、制御装置2は、踵の接地から次の接地までの時間を測定し、1歩行周期が2秒と測定された場合、重複歩調xはx=60/2=30(重複歩数/分)と算出される。
【0066】
また、制御装置2は、例えば対象となっている脚を右脚とすると、1歩行周期における左脚1歩の距離(歩幅)と、次の右脚1歩の距離を、左右の各1歩において、両足が接地している状態での姿勢センサ12〜16の検出値から各関節の角度を算出する。そして、制御装置2は、算出した左右各1歩における各関節の角度と、各関節間の距離、足首関節と足裏間の距離、及び足の長さ(反力センサ10、11間の距離)とから、当該1歩行周期における重複歩距離yを算出する。
具体的には、左脚を前に出した図2の状態における、右脚のつま先反力センサ10から左脚のつま先反力センサ10までの距離(左脚1歩の幅)と、次に右脚を出した状態における左右のつま先センサが接地を検出している状態での距離(右脚1歩の幅)の合計を、両状態における各関節の角度と、各関節間の距離等から算出し、重複歩距離yとする。
なお、左右同時に接地する状態を確実に把握できるつま先反力センサ10の接地を使用しているが、足の長さ(つま先反力センサ10と踵反力センサ11間の距離)は一定であるので、重複歩距離yを算出できる。
【0067】
次に制御装置2は、ステップ323で判定した歩行シーンに対して、予め記憶部7に記憶しておいた股関節、膝関節、及び足首関節に対する3つの回帰式を読み出し、その変数X、Yに、ステップ328で算出した歩行パラメータ値(重複歩距離y、重複歩調x)を代入することで、対象となっている対象脚1歩行周期の角力積M1を各関節毎に算出する(ステップ329)。
この算出した各関節の角力積は、ステップ325、326で判定された次の重複歩に対して必要な全角力積(アシストしない場合の角力積)である。
【0068】
次に制御装置2は、記憶部7に記憶してある1歩行周期の基準角力積z、及び、ステップ329で算出した角力積M1から、対象となっている対象脚における各関節毎のアシスト率βを算出する(ステップ330)。
ここでアシスト率βは、ある歩行1歩行周期の角力積をM1、基準歩行1歩行周期の角力積をM2、基準歩行のアシスト率をαとした場合、次の式で算出される。
【0069】
アシスト率β={{M1−M2×(1−α×0.01)}/M1}×100(%)
【0070】
そして、基準歩行のアシスト時に装着者が負担する角力積が基準角力積zであり、基準角力積z=M2×(1−α×0.01)であるから、ある1歩行周期に対するアシスト率βは次の通りになる。
【0071】
アシスト率β={(M1−z)/M1}×100(%)
【0072】
次に制御装置2は、算出した各関節毎のアシスト率βから、対象脚の各関節毎のアシスト力(=関節モーメント×アシスト率β)を決定し、決定したアシスト力に従って、対象となっている対象
脚の股関節アシストアクチュエータ17、膝関節アシストアクチュエータ18、足首関節アシストアクチュエータ19を駆動する(ステップ331)。
【0073】
制御装置2は、歩行支援装置の電源がオフされたか判断し(ステップ332)、オフでないと判断した場合(ステップ332;N)ステップ323に戻って歩行支援を継続し、オフと判断した場合(ステップ332;Y)、歩行支援処理を終了する。
【0074】
以上説明したように本実施形態の歩行支援装置によれば、1歩行周期の間における装着者の負担量として角力積に着目し、歩行状態(歩行パラメータの値)が変化したとしても、装着者の1歩行周期における角力積が一定の値(基準角力積)となるように各関節のアシストを行う構成としたので、装着者は歩行状態が変化したとしても同じ角力積の負担感で歩行することができる。
【0075】
以上、本発明の歩行支援装置における1実施形態について説明したが、本発明は説明した実施形態に限定されるものではなく、各請求項に記載した範囲において各種の変形を行うことが可能である。
例えば、説明した実施形態では、1歩行周期における角力積が最小値になる歩き方(歩行状態)、すなわち、導出した回帰式において、最適解(最小の角力積)を導く歩行パラメータ値を持つ歩行状態を基準歩行と定義したが、他の歩行状態を基準歩行と定義してもよい。
例えば、装着者の歩行において頻度が最も高い歩行パラメータ値での歩行を基準歩行としてもよい。この場合、直前の所定時間(例えば、30分)における歩行で最も多かった歩行パラメータ値を求め基準歩行としたり、前日の歩行において最も多かった歩行パラメータ値を求めて基準歩行としてもよい。
または、装着者が歩行支援装置を付けた状態で、予め各歩行シーン毎の歩行を自由にしてもらい、各歩行周期に対する歩行パラメータ値を測定し、その歩行シーンの中で一番多かった(歩行時間の長かった)歩行パラメータ値を決定し、当該歩行パラメータ値での歩行を基準歩行としてもよい。この場合、歩行支援装置では歩行支援無しの状態で測定してもよく、所定アシスト率での歩行支援をしながら測定するようにしてもよい。
【0076】
また説明した実施形態によれば、歩行パラメータを変数とし1歩行周期における角力積を解とする回帰式を歩行データから導出し、この回帰式を使用して、実際に歩行している際の歩行パラメータ値に対する角力積を算出する場合について説明した。
これに対して、詳細な歩行データを測定することで、歩行パラメータ−角力積対応テーブルを作成、及び記憶しておき、この対応テーブルを使用することで、実際の歩行時に算出した歩行パラメータ値に対応する角力積を取得するようにしてもよい。
この場合、実際の歩行時に算出した歩行パラメータ値がテーブルに無い場合には、対応テーブルに存在する最も近い値を使用して角力積を決定する。
また、この場合、基準歩行の角力積は別途導出した回帰式を使用して決定しても良く、回帰式自体を作成しない場合には、上記対応テーブルにおいて最も小さい値の角力積を基準歩行の角力積としてもよい。
【0077】
歩行パラメータとして、重複歩距離Yと重複歩調Xを使用したが、他のパラメータを使用するようにしてもよい。
例えば、重複歩調Xに変えて1歩行周期Q(秒)を使用してもよい。
また、重複歩距離Yと重複歩調X(又は1歩調周期Q)に加え、床反力を歩行パラメータとしてもよい。
更に、両足が接地している場合の高さの差や、つま先関節の角度を歩行パラメータとして追加することで、歩行シーンの判定を不要にするようにしてもよい。
【0078】
また説明した実施形態では、角力積、基準角力積を使用してアシスト率βを決定したが、この角力積、基準角力積に変えて、角力積/体重、基準角力積/体重を使用するようにしてもよい。
【0079】
また説明した実施形態では、歩行動作を開始してから1回目の1歩行周期からは歩行パラメータを算出せず(ステップ327;Y)、2回目以降の1歩行周期から歩行パラメータを算出する場合について説明した。すなわち、2回目以降の1歩行周期から歩行パラメータを算出し、3回目以降の1歩行周期における歩行動作に対してアシストを行うことになる。
これに対して、歩行動作開始後1回目の1歩行周期から歩行パラメータを算出するようにしてもよい。この場合ステップ327の判断処理は不要である。
そして、対象脚による1回めの1歩行周期が、歩行開始の最初の動作である場合、すなわち、対象脚側から歩行動作を開始した場合には、当該1歩行周期から算出した重複歩距離の値と重複歩調の値を2倍した値を1歩行周期の歩行パラメータとして算出する(ステップ328)。
一方、対象脚による1回目の1歩行周期が、歩行開始の最初の動作でない場合、すなわち、対象脚の反対側の脚から歩行動作を開始した場合には、当該1歩行周期から算出した重複歩距離の値と重複歩調の値を1歩行周期の歩行パラメータとして算出する(ステップ328)。
この変形例により、1回目の1歩行周期から算出される歩行パラメータを使用して、2回目の1歩行周期における重複歩に対するアシストを行うことができる。
なお、この場合においても、1回目の1歩行周期の歩行動作に対してはデフォルトのアシスト率を使用したアシストを行う。
【符号の説明】
【0080】
1 装着型ロボット
2 制御装置
3 センサ情報取得部
4 各種パラメータ算出部
5 歩行動作判定部
6 歩行シーン判定部
7 記憶部
8 歩行アシスト力決定部
10 つま先反力センサ
11 踵反力センサ
12 つま先姿勢センサ
13 踵姿勢センサ
14 腰姿勢センサ
15 上腿姿勢センサ
16 下腿姿勢センサ
17 股関節アシストアクチュエータ
18 膝関節アシストアクチュエータ
19 足首関節アシストアクチュエータ
21 腰部装着部
22 上腿装着部
23 下腿装着部
24 足装着部
26 上腿連結部材
27 下腿連結部材
【特許請求の範囲】
【請求項1】
1歩行周期の歩行に対して必要な角力積のうち、歩行支援対象者の負担分である基準角力積zを記憶する基準角力積記憶手段と、
歩行中の前記歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得手段と、
前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出手段と、
前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が前記基準角力積zとなるように、アシスト力を決定するアシスト力決定手段と、
前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援手段と、
を具備することを特徴とする歩行支援装置。
【請求項2】
1歩行周期に対する重複歩距離と、重複歩調を前記歩行パラメータとし、
前記歩行パラメータ値取得手段は、1歩行周期に対する重複歩距離と重複歩調の値を歩行パラメータの値として取得する、
ことを特徴とする請求項1に記載の歩行支援装置。
【請求項3】
歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を記憶する回帰式記憶手段を備え、
前記回帰式における最適解を導く歩行パラメータの値による歩行を基準歩行として、当該基準歩行において前記歩行支援対象者が負担すべき1歩行周期の角力積を基準角力積とし、
前記角力積M1は、前記取得した歩行パラメータの値を前記回帰式に代入することで算出する、
ことを特徴とする請求項1、又は請求項2に記載の歩行支援装置。
【請求項4】
前記回帰式記憶手段は、種々の各歩行状態で歩行することで計測される1歩行周期に対する各歩行パラメータの値と角力積とを歩行データとし、当該歩行データから応答曲面法又は重回帰分析により導出した回帰式を記憶する、
ことを特徴とする請求項3に記載の歩行支援装置。
【請求項5】
前記歩行パラメータ値取得手段は、左右の脚のいずれか一方を対象脚とした場合に、当該対象脚の1歩行周期毎の歩行パラメータを取得し、
前記角力積算出手段は、前記取得した各1歩行周期の歩行パラメータ毎に前記対象脚の角力積M1を算出し、
前記アシスト力決定手段は、1つ前の1歩行周期に対して算出された前記対象脚の角力積M1から、前記対象脚に対する次の1歩行周期のアシスト力を決定する、
ことを特徴とする請求項1から請求項4のうちのいずれか1の請求項に記載の歩行支援装置。
【請求項6】
歩行支援対象者が歩行する歩行面の種類を判定する歩行面判定手段を備え、
前記基準角力積記憶手段は、各歩行面の種類毎に基準角力積zを記憶し、
前記角力積算出手段は、前記取得した歩行パラメータの値と前記判定した歩行面の種類から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出し、
前記アシスト力決定手段は、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、前記判定した歩行面の種類に対応して記憶した前記基準角力積zとなるように、アシスト力を決定する、
ことを特徴とする請求項1から請求項5に記載の歩行支援装置。
【請求項7】
歩行中の歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得機能と、
前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出機能と、
前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、1歩行周期の歩行に対して必要な角力積のうち前記歩行支援対象者の負担分である基準角力積zとなるように、アシスト力を決定するアシスト力決定機能と、
前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援機能と、
をコンピュータに実現させる歩行支援プログラム。
【請求項1】
1歩行周期の歩行に対して必要な角力積のうち、歩行支援対象者の負担分である基準角力積zを記憶する基準角力積記憶手段と、
歩行中の前記歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得手段と、
前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出手段と、
前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が前記基準角力積zとなるように、アシスト力を決定するアシスト力決定手段と、
前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援手段と、
を具備することを特徴とする歩行支援装置。
【請求項2】
1歩行周期に対する重複歩距離と、重複歩調を前記歩行パラメータとし、
前記歩行パラメータ値取得手段は、1歩行周期に対する重複歩距離と重複歩調の値を歩行パラメータの値として取得する、
ことを特徴とする請求項1に記載の歩行支援装置。
【請求項3】
歩行パラメータを変数とし1歩行周期の角力積を解とする回帰式を記憶する回帰式記憶手段を備え、
前記回帰式における最適解を導く歩行パラメータの値による歩行を基準歩行として、当該基準歩行において前記歩行支援対象者が負担すべき1歩行周期の角力積を基準角力積とし、
前記角力積M1は、前記取得した歩行パラメータの値を前記回帰式に代入することで算出する、
ことを特徴とする請求項1、又は請求項2に記載の歩行支援装置。
【請求項4】
前記回帰式記憶手段は、種々の各歩行状態で歩行することで計測される1歩行周期に対する各歩行パラメータの値と角力積とを歩行データとし、当該歩行データから応答曲面法又は重回帰分析により導出した回帰式を記憶する、
ことを特徴とする請求項3に記載の歩行支援装置。
【請求項5】
前記歩行パラメータ値取得手段は、左右の脚のいずれか一方を対象脚とした場合に、当該対象脚の1歩行周期毎の歩行パラメータを取得し、
前記角力積算出手段は、前記取得した各1歩行周期の歩行パラメータ毎に前記対象脚の角力積M1を算出し、
前記アシスト力決定手段は、1つ前の1歩行周期に対して算出された前記対象脚の角力積M1から、前記対象脚に対する次の1歩行周期のアシスト力を決定する、
ことを特徴とする請求項1から請求項4のうちのいずれか1の請求項に記載の歩行支援装置。
【請求項6】
歩行支援対象者が歩行する歩行面の種類を判定する歩行面判定手段を備え、
前記基準角力積記憶手段は、各歩行面の種類毎に基準角力積zを記憶し、
前記角力積算出手段は、前記取得した歩行パラメータの値と前記判定した歩行面の種類から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出し、
前記アシスト力決定手段は、前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、前記判定した歩行面の種類に対応して記憶した前記基準角力積zとなるように、アシスト力を決定する、
ことを特徴とする請求項1から請求項5に記載の歩行支援装置。
【請求項7】
歩行中の歩行支援対象者における、歩行状態を規定する1歩行周期に対する歩行パラメータの値を取得する歩行パラメータ値取得機能と、
前記取得した歩行パラメータの値から、当該歩行パラメータの値で歩行した場合に必要な1歩行周期の角力積M1を算出する角力積算出機能と、
前記算出した角力積M1に対して、前記歩行支援対象者が負担する1歩行周期の角力積が、1歩行周期の歩行に対して必要な角力積のうち前記歩行支援対象者の負担分である基準角力積zとなるように、アシスト力を決定するアシスト力決定機能と、
前記決定したアシスト力を前記歩行支援対象者の脚部に作用させることにより、前記歩行支援対象者が前記脚部の関節に発生させる関節モーメントを軽減して前記歩行支援対象者の歩行を支援する歩行支援機能と、
をコンピュータに実現させる歩行支援プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−48702(P2013−48702A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187985(P2011−187985)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]