
歩行状態推定装置及びこれを用いた歩行補助装置

【課題】人間の左右の身体動作の非対称性の程度によらず、当該人間の歩行状態を高精度で推定しうる装置等を提供する。
【解決手段】人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号(差分振動子)が得られる。また、この波形信号からパワースペクトルが得られる。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす基本周波数f0を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。
【解決手段】人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号(差分振動子)が得られる。また、この波形信号からパワースペクトルが得られる。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす基本周波数f0を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人間の歩行状態を推定する装置と、当該推定結果を用いて当該人間の歩行運動を補助する装置とに関する。
【背景技術】
【0002】
人間の上下方向等の加速度を検知するために、当該人間の身体に取り付けられている加速度センサの出力波形を得て、この出力波形のパワースペクトルに基づき、当該人間の歩行周期を検出する技術的手法が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−342254号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、人間の左右の脚の動作が非対称になっている場合、パワースペクトルに出現する複数のピーク位置を示す周波数に基づき、当該ピークの数に応じた複数の基準にしたがって人間の歩行周期が算定される。このため、人間の脚動作の非対称度によっては、当該複数の基準のうち当該人間の歩行周期を推定するために最適な基準が選択されず、その結果として歩行周期の推定精度が低下する可能性がある。
【0005】
そこで、本発明は、人間の左右の身体動作の非対称性の程度によらず、当該人間の歩行状態を高精度で推定しうる装置等を提供することを解決課題とする。
【課題を解決するための手段】
【0006】
本発明の歩行状態推定装置は、歩行中の人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である差分振動子に窓を掛ける窓処理を実行するように構成されている窓処理要素と、前記窓が掛けられた前記差分振動子を周波数解析することによりパワースペクトルを取得するように構成されている周波数解析処理要素と、前記パワースペクトルにおいて閾値以上の高さを有するとともに、最低の周波数帯域に位置するピークを示す基本周波数を決定するように構成されているスペクトル解析処理要素とを備え、前記窓処理要素は、前記スペクトル解析処理要素により決定された前回基本周波数に基づき、当該基本周波数を変数とする減少関数にしたがって、今回の前記窓の幅を設定するように構成されていることを特徴とする。
【0007】
本発明の歩行状態推定装置によれば、人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号としての差分振動子が得られ、この差分振動子からパワースペクトルが得られる。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす「基本周波数」を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。
【0008】
前回の基本周波数が高いほど今回の指定期間における差分振動子に掛けられる今回窓の幅が狭く設定される一方、前回の基本周波数が低いほど今回窓の幅が広く設定される。このため、今回の基本周波数を推定する観点から、周波数解析の対象として過不足のない適当な幅の差分振動子が抽出されうる。
【0009】
前記窓処理要素が、前記差分振動子をダウンサンプリングすることによって、前記差分振動子から第1指定周波数を超える高周波数成分を除去した上で、前記窓処理を実行するように構成されていることが好ましい。
【0010】
前記窓処理要素が、前記差分振動子をハイパスフィルタに通すことにより、前記差分振動子から第2指定周波数以下の低周波成分を除去した上で、前記窓処理を実行するように構成されていることが好ましい。
【0011】
本発明は、人間の上体に取り付けられる第1装具と、前記人間の左右の大腿のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている左股関節角度センサ及び右股関節角度センサと、少なくとも前記左股関節角度センサ及び前記右股関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の大腿の相対的な周期的運動を伴う前記人間の歩行運動を補助する装置に関する。
【0012】
本発明の歩行補助装置は、前記左関節角度センサ及び前記右股関節角度センサを通じた前記人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である前記差分振動子を用いて、前記基本周波数を決定する前記歩行状態推定装置をさらに備え、前記制御装置が、前記歩行状態推定装置により決定された前記基本周波数に応じて定まる周期にしたがって前記アクチュエータの周期的な動作を制御するように構成されていることを特徴とする。
【0013】
本発明の歩行補助装置によれば、アクチュエータの周期的な動作により、人間の各脚の周期的動作が補助される。この際、本発明の歩行状態推定装置による、人間の推定歩行状態を表わす基本周波数に基づき、アクチュエータの動作周期が定められる。このため、前記のように基本周波数に基づいて高精度で推定される人間の歩行状態に鑑みて適当な周期で当該人間の歩行運動が補助されうる。
【図面の簡単な説明】
【0014】
【図1】本発明の歩行補助装置及の構成説明図。
【図2】歩行補助装置の制御装置の構成説明図。
【図3】歩行補助装置の制御方法に関する説明図。
【図4】時定数の設定方法に関する説明図。
【図5】基本周波数推定方法に関する説明図。
【図6】波形信号、窓処理及び周波数解析に関する説明図。
【発明を実施するための形態】
【0015】
(歩行補助装置の構成)
以下、脚体等の左右を区別するために符号「L」及び「R」を用いるが、左右を区別する必要がない場合や左右成分を有するベクトルを表現する場合には当該符号を省略する。また、上体に対する各大腿の屈曲運動(前方運動)及び伸展運動(後方運動)を区別するために符号「+」及び「−」を用いる。
【0016】
図1に示されている歩行補助装置10は、第1装具11と、左右一対の第2装具12と、左右一対のアクチュエータ14と、バッテリ16と、制御装置20と、股関節角度センサ202とを備えている。
【0017】
第1装具11は、人間又は利用者の上体又は腰部(第1身体部分)に巻き付けられるように装着される。第1装具11のうち少なくとも人間の背中に当接する背後部は、軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により構成され、その他の部分は繊維等の柔軟性素材により構成されている。
【0018】
第2装具12は、繊維等の柔軟性素材により構成され、人間の大腿(第2身体部分)に巻き付けられるように装着される。第2装具12は左右両側ではなく左右片側のみに設けられてもよい。
【0019】
アクチュエータ14は電動モータにより構成され、必要に応じてモータに加え減速機及びコンプライアンス機構のうち一方又は両方により構成される。アクチュエータ14は第1装具11が上体に取り付けられたとき、上体の左右両側に配置されるように第1装具11に連結されている。アクチュエータ14は、軽量の軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により形成されている連結部材15を介して大腿に装着される第2装具12に連結される。
【0020】
これにより、アクチュエータ14が動作することで、上体及び各大腿の相対運動が補助されるように上体及び各大腿に力が作用する。上体及び各大腿の相対運動には、離床している脚体の大腿の上体に対する前後運動が含まれ、着床している脚体に対する上体の前後運動が含まれる。
【0021】
バッテリ16は制御装置20とともに第1装具11の背後部に取り付けられるケース13に収納されており、アクチュエータ14及び制御装置20等に対して電力を供給する。なお、バッテリ16及び制御装置20のそれぞれ又はこれらを収納するケース13の配置箇所は適宜変更されてもよい。
【0022】
股関節角度センサ202は人間の腰部左右両側に配置されるロータリーエンコーダにより構成され、股関節角度に応じた信号を出力する。股関節角度は、大腿が基本前額面の前方にある場合には正値になり、大腿が基本前額面の後方にある場合には負値になるように定義される。
【0023】
制御装置20はコンピュータ(CPU、ROM、RAM、信号入力回路、信号出力回路等により構成される。)と、このコンピュータのメモリ又は記憶装置に格納されているソフトウェアとにより構成されている。制御装置20は、バッテリ16からアクチュエータ14に対する供給電力を調節するほか、アクチュエータ14の動作を制御する。
【0024】
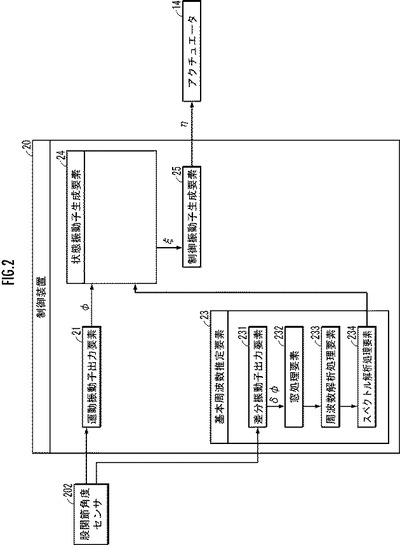
図2に示されているように、制御装置20は、後述の演算処理を実行する又は機能を発揮する運動振動子出力要素21と、基本周波数推定要素23と、状態振動子生成要素24と、制御振動子生成要素25とを備えている。基本周波数推定要素23は、本発明の「歩行状態推定装置」を構成し、差分振動子出力要素231と、窓処理要素232と、周波数解析処理要素233と、スペクトル解析処理要素234とを備えている。
【0025】
制御装置20の各構成要素は、記憶装置に格納されているプログラムを読み取り、当該プログラムにしたがって担当する演算処理を実行する演算処理装置により構成されている。各構成要素は、共通の演算処理装置により構成されていてもよく、物理的に別個の演算処理装置により構成されていてもよい。たとえば、基本周波数推定要素23が、その他の構成要素とは別個の演算処理装置により構成されていてもよい。
【0026】
運転スイッチ(図示略)が操作され、バッテリ16から制御装置20に対して電力が供給されることにより、制御装置20は諸機能を発揮しうる。
【0027】
(歩行補助装置及び歩行状態推定装置の機能)
運動振動子出力要素21が、股関節角度センサ202の出力に基づき、人間の左右の股関節角度の時間変化を表わす波形信号を運動振動子φ=(φL,φR)として生成する(図3/STEP1)。「φL」は左運動振動子を表わし、「φR」は右運動振動子を表わしている。
【0028】
また、基本周波数推定要素23が後述する演算処理を実行することにより、人間の歩行周期の逆数に相当する基本周波数f0を推定する(図3/STEP3)。
【0029】
続いて、状態振動子生成要素24が、連立微分方程式(010)により定義される状態振動子モデルに対して、入力波形信号として運動振動子出力要素21から出力される運動振動子を入力することにより、出力波形信号として状態振動子ξを生成する(図3/STEP5)。状態振動子ξには、左屈曲振動子ξL+、左伸展振動子ξL-、右屈曲振動子ξR+及び右伸展振動子ξR-が含まれる。
【0030】
「状態振動子モデル」は、各大腿の屈曲運動状態及び伸展運動状態のそれぞれを表わす複数の状態変数ui(i=L+,L−,R+,R−)及び各大腿の屈曲運動状態及び伸展運動状態のそれぞれの順応性を表現するための自己抑制因子viの連立微分方程式(010)により定義されている。
【0031】
τ1L(duL+/dt)=cL+−uL++wL+/L-ξL-+wL+/R+ξR+−λLvL++f1(ωL)+f2(ωL)KφL,
τ1L(duL-/dt)=cL-−uL-+wL-/L+ξL++wL-/R-ξR-−λLvL-+f1(ωL)+f2(ωL)KφL,
- τ1R(duR+/dt)=cR+−uR++wR+/L+ξL++wR+/R-ξR+−λRvR++f1(ωR)+f2(ωR)KφR,
τ1R(duR-/dt)=cR-−uR-+wR-/L-ξL-+wR-/R+ξR+−λRvR-+f1(ωR)+f2(ωR)KφR,
τ2i(dvi/dt)=−vi+ξi (i=L+,L-,R+,R-),
ξi=H(ui−uth)=0(ui<uth) ..(010)。
【0032】
「cL+」は、左大腿の屈曲運転状態を表わす状態変数uL+の振幅の大小を定める「左屈曲係数」である。「cL-」は、左大腿の伸展運転状態を表わす状態変数uL-の振幅の大小を定める「左伸展係数」である。「cR+」は、右大腿の屈曲運転状態を表わす状態変数uR+の振幅の大小を定める「右屈曲係数」である。「cR-」は、右大腿の伸展運転状態を表わす状態変数uR-の振幅の大小を定める「右伸展係数」である。
【0033】
「τ1L」は状態変数uL+及びuL-の周波数の高低を定める第1左時定数である。「τ1R」は状態変数uR+及びuR-の周波数の高低を定める第1右時定数である。第1左時定数τ1L及び第1右時定数τ1Rは同値であってもことなる値であってもよい。「τ2i」は抑制因子viの周波数の高低を定める第2時定数である。第2時定数τ2iは同値であってもよく、異なる値であってもよい。たとえば、第2左屈曲時定数τ2L+と第2左伸展時定数τ2L-とが同値であり、第2右屈曲時定数τ2R+と第2右伸展時定数τ2R-とが同値である一方、第2左屈曲時定数τ2L+と第2右屈曲時定数τ2R+とが異なる値であってもよい。
【0034】
「wi/j」は状態変数ui及びujの相関関係を表わす負値の相関係数である。「λL」および「λR」は慣れ係数である。「K」は運動振動子φに応じたフィードバック係数である。
【0035】
「ω」は人間の歩行周期の長短に応じて定まる固有角速度である。固有角速度ωは、たとえば基本周波数f0(又は補正後基本周波数f0_d)に2πを乗じた値に設定される。固有角速度ωには左成分ωL及び右成分ωRが含まれるが、基本周波数f0には左右の別がないので、ωL及びωRは同値である。
【0036】
「f1」は正係数cを用いて式(011)により定義される固有角速度ωの1次関数である。
【0037】
f1(ω)=cω ..(011)。
【0038】
「f2」は係数c0,c1およびc2を用いて式(012)により定義される固有角速度ωの2次関数である。
【0039】
f2(ω)=c0+c1ω+c2ω2 ..(012)。
【0040】
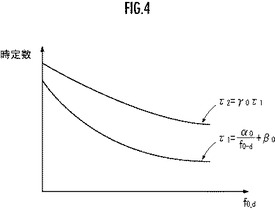
状態振動子生成要素24は、補正後基本周波数f0_dと、係数α0(>0)及びβ0(>0)とに基づき、関係式(023)にしたがって第1時定数τ1の値を調節又は設定する。
【0041】
τ1=α0/f0_d+β0 ..(023)。
【0042】
状態振動子生成要素24は、第1時定数τ1と、係数γ0(>0。たとえば「2」)とに基づき、関係式(024)にしたがって第2時定数τ2の値を調節又は設定する。
【0043】
τ2=γ0τ1 ..(024)。
【0044】
関係式(023)により定義される関数は、図4に示されているような変化特性を示す。このため、補正後基本周波数f0_dが高くなる(歩行周期が短くなる)につれて、第1時定数τ1及び第2時定数τ2の値が減少するように調節される。また、補正後基本周波数f0_dが低くなる(歩行周期が長くなる)につれて、第1時定数τ1及び第2時定数τ2の値が増加するように調節される。
【0045】
歩行補助装置10の動作開始から、非対称度sの評価に必要な運動振動子が得られるまでの期間において、各係数ci(i=L+,L−,R+,R−)は予め定められている初期値に設定される。同様に、歩行補助装置10の動作開始から、基本周波数f0の推定に必要な差分振動子(後述)が得られるまでの期間において、固有角速度ωは予め定められている初期値に設定される。
【0046】
状態振動子モデルに入力される運動振動子φとして、人間の左右の股関節角度の時間変化態様を表わす波形信号に代えて、左右の股関節角速度、左右の肩関節角度又は左右の肩関節角速度等、人間の歩行周期と緊密に関連した周期で変化する左右一対の変数の時間変化態様を表わす波形信号が採用されてもよい。肩関節角度は、股関節角度と同様に、ロータリーエンコーダにより構成されている一対の肩関節角度センサが人間の左右の肩の外側に配置され、当該肩関節角度センサの出力に基づいて測定されうる。
【0047】
状態振動子ξiは、状態変数uiの値が閾値uth未満である場合は0、状態変数uiの値が閾値uth以上である場合はこのuiの値をとる(連立微分方程式(010)参照)。これにより、左大腿の屈曲運動状態を表わす状態変数uL+が大きくなると左屈曲振動子ξL+の振幅が左伸展振動子ξL-よりも大きくなる。また、右大腿の屈曲運動状態を表わす状態変数uR+が大きくなると右屈曲振動子ξR+の振幅が右伸展振動子ξR-の振幅よりも大きくなる。
【0048】
さらに、左大腿の伸展運動状態を表わす状態変数uL-が大きくなると左伸展振動子ξL-の振幅が左屈曲振動子ξL+よりも大きくなる。また、右大腿の伸展運動状態を表わす状態変数uR-が大きくなると右伸展振動子ξR-の振幅が右屈曲振動子ξR+の振幅よりも大きくなる。
【0049】
結果として、連立微分方程式(010)に含まれる左屈曲係数cL+及び左伸展係数cL-のそれぞれの値に応じた振幅と、第1左時定数τ1Lの値に応じた周波数とにしたがって変化する左屈曲振動子ξL+及び左伸展振動子ξL-が生成される。また、連立微分方程式(010)に含まれる右屈曲係数cR+及び右伸展係数cR-のそれぞれの値に応じた振幅と、第1右時定数τ1Rの値に応じた周波数とにしたがって変化する右屈曲振動子ξR+及び右伸展振動子ξR-が生成される。
【0050】
そして、制御振動子生成要素25が状態振動子ξに基づき、関係式(040)にしたがって制御振動子η=(ηL,ηR)を設定する(図3/STEP6)。
【0051】
ηL=χL+ξL+−χL-ξL-,ηR=χR+ξR+−χR-ξR- ..(040)。
【0052】
左制御振動子ηLは、左屈曲振動子ξL+及び係数χL+の積と、左伸展振動子ξL-及び係数χL-の積との差として算定される。右制御振動子ηRは、右屈曲振動子ξR+及び係数χR+の積と、右伸展振動子ξR-及び係数χR-の積との差として算定される。当該4つの係数χiは同じ値に設定されてもよい。
【0053】
そして、制御装置20により制御振動子ηに基づいてバッテリ16から左右のアクチュエータ14L,14Rにそれぞれ供給される電流I=(IL,IR)が調節される。これにより、第1装具11及び第2装具12を介して上体に対する左右の大腿の屈曲運動及び伸展運動を補助する力又は股関節回りの回転力F=(FL,FR)が調節される。補助力Fは電流Iに基づき、たとえばF(t)=G・I(t)(G:比例係数)と表現される。エージェントの歩行運動はトレッドミルの上で実施されてもよい。
【0054】
その後、運転スイッチがONからOFFに切り替えられたこと、又は、動作異常が検知されたこと等の動作終了条件が満たされたか否かが判定される(図3/STEP7)。そして、当該判定結果が否定的である場合(図3/STEP7‥NO)、前記一連の処理が繰り返される一方、当該判定結果が肯定的である場合(図3/STEP7‥YES)、前記一連の処理が終了する。
【0055】
(基本周波数の推定)
基本周波数推定要素23による基本周波数f0の推定処理(図3/STEP3参照)について説明する。
【0056】
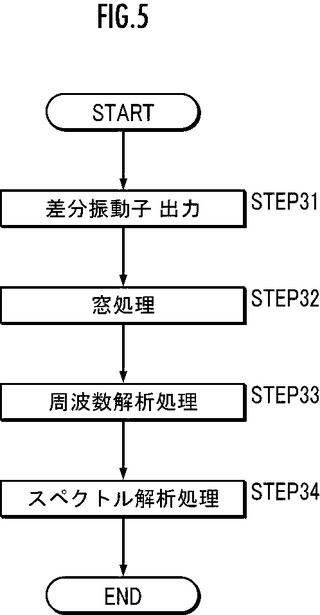
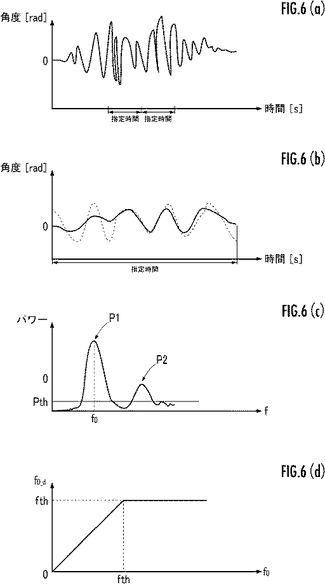
まず、差分振動子出力要素231が、左右の股関節角度センサ202R,202Lの出力に基づき、股関節角度の差分の時間変化を表わす波形信号を差分振動子として出力する(図5/STEP31)。これにより、図6(a)に示されているような波形信号が差分振動子として得られる。なお、股関節角度の差分に代えて肩関節角度の差分の時間変化を表わす波形信号が差分振動子として出力されてもよい。
【0057】
続いて、窓処理要素232が、指定期間にわたる差分振動子に窓を掛ける(図5/STEP32)。窓関数としてはハン窓が用いられ、これにより図6(b)に破線で示されている指定期間にわたる差分振動子が、実線で示されているように変形される。窓関数としては、ハン窓のほか、矩形窓、ガウス窓、ハミング窓、ブラックマン窓、カイザー窓、バートレット窓又は指数窓などのさまざまな窓関数が用いられうる。
【0058】
窓処理要素232は、スペクトル解析処理要素234により決定された前回基本周波数f0(k-1)に基づき、当該基本周波数f0を変数とする減少関数にしたがって、今回の窓の幅w(k)を設定する。この減少関数はたとえば関係式(050)により定義される。係数w01及びw02は歩行周期が少なくとも2周期だけ含まれるように設定されている。なお、窓処理要素232は、初回の窓幅w(0)として、歩行周期が少なくとも2周期含まれるような定数を採用する。
【0059】
w(k)=w01/f0(k-1)+w02 ..(050)。
【0060】
窓処理要素232は、差分振動子(波形信号)をダウンサンプリングすることによって、差分振動子から第1指定周波数を超える高周波数成分を除去した上で、窓処理を実行してもよい。窓処理要素232は、差分振動子(波形信号)をハイパスフィルタに通すことにより、差分振動子から第2指定周波数以下の低周波成分を除去した上で、窓処理を実行してもよい。
【0061】
周波数解析処理要素233は、窓処理された今回指定期間における差分振動子をFFT等、周波数解析処理することにより、パワースペクトルを作成する(図5/STEP33)。これにより、図6(c)に示されているように周波数fが横軸で表わされ、周波数解析結果としてのパワーが縦軸で表わされているパワースペクトルが生成される。
【0062】
スペクトル解析処理要素234は、閾値以上の高さを有するとともに、最低の周波数帯域にあるピークの位置を表わす周波数を基本周波数f0として決定又は推定する(図5/STEP34)。閾値は、ノイズを除去する観点から、パワースペクトルにおけるピーク最高値の0.05〜0.20倍の範囲の値に設定される。これにより、図6(c)に示されているように、閾値pth以上の高さを有するピークP1及びP2のうち、最低の周波数帯域にあるピークP1の位置を表わす周波数が基本周波数f0として決定される。
【0063】
さらに、図6(d)に示されている曲線を表わす関係式(060)にしたがって基本周波数f0が補正されることにより、補正後基本周波数f0_dが決定される。
【0064】
f0_d=f0 (if f0≦fth), fth (if f0>fth) ..(060)。
【0065】
(歩行補助装置及び歩行状態推定装置の作用効果)
前記機能を発揮する基本周波数推定要素23によれば、人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号(差分振動子)が得られる(図5/STEP31、図6(a)参照)。また、この波形信号からパワースペクトルが得られる(図5/STEP33、図6(c)参照)。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす基本周波数f0を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。歩行状態は、基本周波数f0の逆数である推定歩行周期のほか、歩幅又は歩行率など、基本周波数f0に基づいて算定されうるあらゆる状態値によって表現される。
【0066】
また、前回の基本周波数f0(k-1)が高いほど今回の指定期間における波形信号に掛けられる今回窓の幅w(k)が狭く設定される一方、前回の基本周波数f0(k-1)が低いほど今回窓の幅w(k)が広く設定される。このため、今回の基本周波数f0(k)を推定する観点から、周波数解析の対象として過不足のない適当な幅の波形信号が抽出されうる(図5/STEP32、図6(b)参照)。
【0067】
さらに、歩行補助装置10によれば、アクチュエータ14の周期的な動作により、人間の各脚の周期的動作が補助される(図3/STEP6参照)。この際、人間の推定歩行状態を表わす基本周波数f0に基づき、アクチュエータ14の動作周期が定められる(関係式(023)及び(024)参照)。このため、前記のように基本周波数f0に基づいて高精度で推定される人間の歩行状態に鑑みて適当な周期で当該人間の歩行運動が補助されうる。
【0068】
(本発明の他の実施形態)
制御装置20は、左屈曲係数cL+、左伸展係数cL-、右屈曲係数cR+及び右伸展係数cR-のそれぞれの値の大小に応じて、人間の左大腿の屈曲運動及び伸展運動並びに右大腿の屈曲運動及び伸展運動のそれぞれを補助するためのアクチュエータ14の動作振幅の大小を制御するように構成されていれば、その構成は前記実施形態の構成に限定されない。アクチュエータ14L,14Rの動作周期は、固有角速度ωL、ωRに応じて2π/ωL、2π/ωRに一致するように制御されてもよい。
【0069】
たとえば、制御装置20は、左屈曲係数cL+、左伸展係数cL-、右屈曲係数cR+及び右伸展係数cR-のそれぞれの値を、左股関節角度の屈曲側目標値、左股関節角度の伸展側目標値、右股関節角度の屈曲側目標値及び右股関節角度の伸展側目標値のそれぞれとして、PID制御等のフィードバック制御則にしたがって、左右の股関節角度を制御するように構成されていてもよい。この場合、運動振動子出力要素21、状態振動子生成要素24及び制御振動子生成要素25は省略されてもよい。
【0070】
特許第3930399号、特許第3950149号、特許第4008464号又は特許第4271711号等の公報に記載されているように、ファン・デル・ポル方程式等により定義される第1モデルにしたがって第1振動子が生成され、かつ、当該第1振動子に基づいて固有角速度ω(連立微分方程式(010)参照)が設定された上で、当該固有角速度ωの逆数に比例するように時定数τ1が設定されてもよい。当該公報における「第2振動子」が本願発明における「状態振動子」に相当する。
【0071】
制御振動子ηは特許第4271711号等の公報に記載されているように、仮想的な弾性要素による弾性力及び仮想的な減衰要素による減衰力のうち一方又は両方を表わすように生成されてもよい。
【符号の説明】
【0072】
10‥歩行補助装置、11‥第1装具、12‥第2装具、14‥アクチュエータ、20‥制御装置、23‥基本周波数推定要素(歩行状態推定装置)、232‥窓処理要素、233‥周波数解析処理要素、234‥スペクトル解析処理要素。
【技術分野】
【0001】
本発明は、人間の歩行状態を推定する装置と、当該推定結果を用いて当該人間の歩行運動を補助する装置とに関する。
【背景技術】
【0002】
人間の上下方向等の加速度を検知するために、当該人間の身体に取り付けられている加速度センサの出力波形を得て、この出力波形のパワースペクトルに基づき、当該人間の歩行周期を検出する技術的手法が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−342254号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、人間の左右の脚の動作が非対称になっている場合、パワースペクトルに出現する複数のピーク位置を示す周波数に基づき、当該ピークの数に応じた複数の基準にしたがって人間の歩行周期が算定される。このため、人間の脚動作の非対称度によっては、当該複数の基準のうち当該人間の歩行周期を推定するために最適な基準が選択されず、その結果として歩行周期の推定精度が低下する可能性がある。
【0005】
そこで、本発明は、人間の左右の身体動作の非対称性の程度によらず、当該人間の歩行状態を高精度で推定しうる装置等を提供することを解決課題とする。
【課題を解決するための手段】
【0006】
本発明の歩行状態推定装置は、歩行中の人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である差分振動子に窓を掛ける窓処理を実行するように構成されている窓処理要素と、前記窓が掛けられた前記差分振動子を周波数解析することによりパワースペクトルを取得するように構成されている周波数解析処理要素と、前記パワースペクトルにおいて閾値以上の高さを有するとともに、最低の周波数帯域に位置するピークを示す基本周波数を決定するように構成されているスペクトル解析処理要素とを備え、前記窓処理要素は、前記スペクトル解析処理要素により決定された前回基本周波数に基づき、当該基本周波数を変数とする減少関数にしたがって、今回の前記窓の幅を設定するように構成されていることを特徴とする。
【0007】
本発明の歩行状態推定装置によれば、人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号としての差分振動子が得られ、この差分振動子からパワースペクトルが得られる。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす「基本周波数」を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。
【0008】
前回の基本周波数が高いほど今回の指定期間における差分振動子に掛けられる今回窓の幅が狭く設定される一方、前回の基本周波数が低いほど今回窓の幅が広く設定される。このため、今回の基本周波数を推定する観点から、周波数解析の対象として過不足のない適当な幅の差分振動子が抽出されうる。
【0009】
前記窓処理要素が、前記差分振動子をダウンサンプリングすることによって、前記差分振動子から第1指定周波数を超える高周波数成分を除去した上で、前記窓処理を実行するように構成されていることが好ましい。
【0010】
前記窓処理要素が、前記差分振動子をハイパスフィルタに通すことにより、前記差分振動子から第2指定周波数以下の低周波成分を除去した上で、前記窓処理を実行するように構成されていることが好ましい。
【0011】
本発明は、人間の上体に取り付けられる第1装具と、前記人間の左右の大腿のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている左股関節角度センサ及び右股関節角度センサと、少なくとも前記左股関節角度センサ及び前記右股関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の大腿の相対的な周期的運動を伴う前記人間の歩行運動を補助する装置に関する。
【0012】
本発明の歩行補助装置は、前記左関節角度センサ及び前記右股関節角度センサを通じた前記人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である前記差分振動子を用いて、前記基本周波数を決定する前記歩行状態推定装置をさらに備え、前記制御装置が、前記歩行状態推定装置により決定された前記基本周波数に応じて定まる周期にしたがって前記アクチュエータの周期的な動作を制御するように構成されていることを特徴とする。
【0013】
本発明の歩行補助装置によれば、アクチュエータの周期的な動作により、人間の各脚の周期的動作が補助される。この際、本発明の歩行状態推定装置による、人間の推定歩行状態を表わす基本周波数に基づき、アクチュエータの動作周期が定められる。このため、前記のように基本周波数に基づいて高精度で推定される人間の歩行状態に鑑みて適当な周期で当該人間の歩行運動が補助されうる。
【図面の簡単な説明】
【0014】
【図1】本発明の歩行補助装置及の構成説明図。
【図2】歩行補助装置の制御装置の構成説明図。
【図3】歩行補助装置の制御方法に関する説明図。
【図4】時定数の設定方法に関する説明図。
【図5】基本周波数推定方法に関する説明図。
【図6】波形信号、窓処理及び周波数解析に関する説明図。
【発明を実施するための形態】
【0015】
(歩行補助装置の構成)
以下、脚体等の左右を区別するために符号「L」及び「R」を用いるが、左右を区別する必要がない場合や左右成分を有するベクトルを表現する場合には当該符号を省略する。また、上体に対する各大腿の屈曲運動(前方運動)及び伸展運動(後方運動)を区別するために符号「+」及び「−」を用いる。
【0016】
図1に示されている歩行補助装置10は、第1装具11と、左右一対の第2装具12と、左右一対のアクチュエータ14と、バッテリ16と、制御装置20と、股関節角度センサ202とを備えている。
【0017】
第1装具11は、人間又は利用者の上体又は腰部(第1身体部分)に巻き付けられるように装着される。第1装具11のうち少なくとも人間の背中に当接する背後部は、軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により構成され、その他の部分は繊維等の柔軟性素材により構成されている。
【0018】
第2装具12は、繊維等の柔軟性素材により構成され、人間の大腿(第2身体部分)に巻き付けられるように装着される。第2装具12は左右両側ではなく左右片側のみに設けられてもよい。
【0019】
アクチュエータ14は電動モータにより構成され、必要に応じてモータに加え減速機及びコンプライアンス機構のうち一方又は両方により構成される。アクチュエータ14は第1装具11が上体に取り付けられたとき、上体の左右両側に配置されるように第1装具11に連結されている。アクチュエータ14は、軽量の軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により形成されている連結部材15を介して大腿に装着される第2装具12に連結される。
【0020】
これにより、アクチュエータ14が動作することで、上体及び各大腿の相対運動が補助されるように上体及び各大腿に力が作用する。上体及び各大腿の相対運動には、離床している脚体の大腿の上体に対する前後運動が含まれ、着床している脚体に対する上体の前後運動が含まれる。
【0021】
バッテリ16は制御装置20とともに第1装具11の背後部に取り付けられるケース13に収納されており、アクチュエータ14及び制御装置20等に対して電力を供給する。なお、バッテリ16及び制御装置20のそれぞれ又はこれらを収納するケース13の配置箇所は適宜変更されてもよい。
【0022】
股関節角度センサ202は人間の腰部左右両側に配置されるロータリーエンコーダにより構成され、股関節角度に応じた信号を出力する。股関節角度は、大腿が基本前額面の前方にある場合には正値になり、大腿が基本前額面の後方にある場合には負値になるように定義される。
【0023】
制御装置20はコンピュータ(CPU、ROM、RAM、信号入力回路、信号出力回路等により構成される。)と、このコンピュータのメモリ又は記憶装置に格納されているソフトウェアとにより構成されている。制御装置20は、バッテリ16からアクチュエータ14に対する供給電力を調節するほか、アクチュエータ14の動作を制御する。
【0024】
図2に示されているように、制御装置20は、後述の演算処理を実行する又は機能を発揮する運動振動子出力要素21と、基本周波数推定要素23と、状態振動子生成要素24と、制御振動子生成要素25とを備えている。基本周波数推定要素23は、本発明の「歩行状態推定装置」を構成し、差分振動子出力要素231と、窓処理要素232と、周波数解析処理要素233と、スペクトル解析処理要素234とを備えている。
【0025】
制御装置20の各構成要素は、記憶装置に格納されているプログラムを読み取り、当該プログラムにしたがって担当する演算処理を実行する演算処理装置により構成されている。各構成要素は、共通の演算処理装置により構成されていてもよく、物理的に別個の演算処理装置により構成されていてもよい。たとえば、基本周波数推定要素23が、その他の構成要素とは別個の演算処理装置により構成されていてもよい。
【0026】
運転スイッチ(図示略)が操作され、バッテリ16から制御装置20に対して電力が供給されることにより、制御装置20は諸機能を発揮しうる。
【0027】
(歩行補助装置及び歩行状態推定装置の機能)
運動振動子出力要素21が、股関節角度センサ202の出力に基づき、人間の左右の股関節角度の時間変化を表わす波形信号を運動振動子φ=(φL,φR)として生成する(図3/STEP1)。「φL」は左運動振動子を表わし、「φR」は右運動振動子を表わしている。
【0028】
また、基本周波数推定要素23が後述する演算処理を実行することにより、人間の歩行周期の逆数に相当する基本周波数f0を推定する(図3/STEP3)。
【0029】
続いて、状態振動子生成要素24が、連立微分方程式(010)により定義される状態振動子モデルに対して、入力波形信号として運動振動子出力要素21から出力される運動振動子を入力することにより、出力波形信号として状態振動子ξを生成する(図3/STEP5)。状態振動子ξには、左屈曲振動子ξL+、左伸展振動子ξL-、右屈曲振動子ξR+及び右伸展振動子ξR-が含まれる。
【0030】
「状態振動子モデル」は、各大腿の屈曲運動状態及び伸展運動状態のそれぞれを表わす複数の状態変数ui(i=L+,L−,R+,R−)及び各大腿の屈曲運動状態及び伸展運動状態のそれぞれの順応性を表現するための自己抑制因子viの連立微分方程式(010)により定義されている。
【0031】
τ1L(duL+/dt)=cL+−uL++wL+/L-ξL-+wL+/R+ξR+−λLvL++f1(ωL)+f2(ωL)KφL,
τ1L(duL-/dt)=cL-−uL-+wL-/L+ξL++wL-/R-ξR-−λLvL-+f1(ωL)+f2(ωL)KφL,
- τ1R(duR+/dt)=cR+−uR++wR+/L+ξL++wR+/R-ξR+−λRvR++f1(ωR)+f2(ωR)KφR,
τ1R(duR-/dt)=cR-−uR-+wR-/L-ξL-+wR-/R+ξR+−λRvR-+f1(ωR)+f2(ωR)KφR,
τ2i(dvi/dt)=−vi+ξi (i=L+,L-,R+,R-),
ξi=H(ui−uth)=0(ui<uth) ..(010)。
【0032】
「cL+」は、左大腿の屈曲運転状態を表わす状態変数uL+の振幅の大小を定める「左屈曲係数」である。「cL-」は、左大腿の伸展運転状態を表わす状態変数uL-の振幅の大小を定める「左伸展係数」である。「cR+」は、右大腿の屈曲運転状態を表わす状態変数uR+の振幅の大小を定める「右屈曲係数」である。「cR-」は、右大腿の伸展運転状態を表わす状態変数uR-の振幅の大小を定める「右伸展係数」である。
【0033】
「τ1L」は状態変数uL+及びuL-の周波数の高低を定める第1左時定数である。「τ1R」は状態変数uR+及びuR-の周波数の高低を定める第1右時定数である。第1左時定数τ1L及び第1右時定数τ1Rは同値であってもことなる値であってもよい。「τ2i」は抑制因子viの周波数の高低を定める第2時定数である。第2時定数τ2iは同値であってもよく、異なる値であってもよい。たとえば、第2左屈曲時定数τ2L+と第2左伸展時定数τ2L-とが同値であり、第2右屈曲時定数τ2R+と第2右伸展時定数τ2R-とが同値である一方、第2左屈曲時定数τ2L+と第2右屈曲時定数τ2R+とが異なる値であってもよい。
【0034】
「wi/j」は状態変数ui及びujの相関関係を表わす負値の相関係数である。「λL」および「λR」は慣れ係数である。「K」は運動振動子φに応じたフィードバック係数である。
【0035】
「ω」は人間の歩行周期の長短に応じて定まる固有角速度である。固有角速度ωは、たとえば基本周波数f0(又は補正後基本周波数f0_d)に2πを乗じた値に設定される。固有角速度ωには左成分ωL及び右成分ωRが含まれるが、基本周波数f0には左右の別がないので、ωL及びωRは同値である。
【0036】
「f1」は正係数cを用いて式(011)により定義される固有角速度ωの1次関数である。
【0037】
f1(ω)=cω ..(011)。
【0038】
「f2」は係数c0,c1およびc2を用いて式(012)により定義される固有角速度ωの2次関数である。
【0039】
f2(ω)=c0+c1ω+c2ω2 ..(012)。
【0040】
状態振動子生成要素24は、補正後基本周波数f0_dと、係数α0(>0)及びβ0(>0)とに基づき、関係式(023)にしたがって第1時定数τ1の値を調節又は設定する。
【0041】
τ1=α0/f0_d+β0 ..(023)。
【0042】
状態振動子生成要素24は、第1時定数τ1と、係数γ0(>0。たとえば「2」)とに基づき、関係式(024)にしたがって第2時定数τ2の値を調節又は設定する。
【0043】
τ2=γ0τ1 ..(024)。
【0044】
関係式(023)により定義される関数は、図4に示されているような変化特性を示す。このため、補正後基本周波数f0_dが高くなる(歩行周期が短くなる)につれて、第1時定数τ1及び第2時定数τ2の値が減少するように調節される。また、補正後基本周波数f0_dが低くなる(歩行周期が長くなる)につれて、第1時定数τ1及び第2時定数τ2の値が増加するように調節される。
【0045】
歩行補助装置10の動作開始から、非対称度sの評価に必要な運動振動子が得られるまでの期間において、各係数ci(i=L+,L−,R+,R−)は予め定められている初期値に設定される。同様に、歩行補助装置10の動作開始から、基本周波数f0の推定に必要な差分振動子(後述)が得られるまでの期間において、固有角速度ωは予め定められている初期値に設定される。
【0046】
状態振動子モデルに入力される運動振動子φとして、人間の左右の股関節角度の時間変化態様を表わす波形信号に代えて、左右の股関節角速度、左右の肩関節角度又は左右の肩関節角速度等、人間の歩行周期と緊密に関連した周期で変化する左右一対の変数の時間変化態様を表わす波形信号が採用されてもよい。肩関節角度は、股関節角度と同様に、ロータリーエンコーダにより構成されている一対の肩関節角度センサが人間の左右の肩の外側に配置され、当該肩関節角度センサの出力に基づいて測定されうる。
【0047】
状態振動子ξiは、状態変数uiの値が閾値uth未満である場合は0、状態変数uiの値が閾値uth以上である場合はこのuiの値をとる(連立微分方程式(010)参照)。これにより、左大腿の屈曲運動状態を表わす状態変数uL+が大きくなると左屈曲振動子ξL+の振幅が左伸展振動子ξL-よりも大きくなる。また、右大腿の屈曲運動状態を表わす状態変数uR+が大きくなると右屈曲振動子ξR+の振幅が右伸展振動子ξR-の振幅よりも大きくなる。
【0048】
さらに、左大腿の伸展運動状態を表わす状態変数uL-が大きくなると左伸展振動子ξL-の振幅が左屈曲振動子ξL+よりも大きくなる。また、右大腿の伸展運動状態を表わす状態変数uR-が大きくなると右伸展振動子ξR-の振幅が右屈曲振動子ξR+の振幅よりも大きくなる。
【0049】
結果として、連立微分方程式(010)に含まれる左屈曲係数cL+及び左伸展係数cL-のそれぞれの値に応じた振幅と、第1左時定数τ1Lの値に応じた周波数とにしたがって変化する左屈曲振動子ξL+及び左伸展振動子ξL-が生成される。また、連立微分方程式(010)に含まれる右屈曲係数cR+及び右伸展係数cR-のそれぞれの値に応じた振幅と、第1右時定数τ1Rの値に応じた周波数とにしたがって変化する右屈曲振動子ξR+及び右伸展振動子ξR-が生成される。
【0050】
そして、制御振動子生成要素25が状態振動子ξに基づき、関係式(040)にしたがって制御振動子η=(ηL,ηR)を設定する(図3/STEP6)。
【0051】
ηL=χL+ξL+−χL-ξL-,ηR=χR+ξR+−χR-ξR- ..(040)。
【0052】
左制御振動子ηLは、左屈曲振動子ξL+及び係数χL+の積と、左伸展振動子ξL-及び係数χL-の積との差として算定される。右制御振動子ηRは、右屈曲振動子ξR+及び係数χR+の積と、右伸展振動子ξR-及び係数χR-の積との差として算定される。当該4つの係数χiは同じ値に設定されてもよい。
【0053】
そして、制御装置20により制御振動子ηに基づいてバッテリ16から左右のアクチュエータ14L,14Rにそれぞれ供給される電流I=(IL,IR)が調節される。これにより、第1装具11及び第2装具12を介して上体に対する左右の大腿の屈曲運動及び伸展運動を補助する力又は股関節回りの回転力F=(FL,FR)が調節される。補助力Fは電流Iに基づき、たとえばF(t)=G・I(t)(G:比例係数)と表現される。エージェントの歩行運動はトレッドミルの上で実施されてもよい。
【0054】
その後、運転スイッチがONからOFFに切り替えられたこと、又は、動作異常が検知されたこと等の動作終了条件が満たされたか否かが判定される(図3/STEP7)。そして、当該判定結果が否定的である場合(図3/STEP7‥NO)、前記一連の処理が繰り返される一方、当該判定結果が肯定的である場合(図3/STEP7‥YES)、前記一連の処理が終了する。
【0055】
(基本周波数の推定)
基本周波数推定要素23による基本周波数f0の推定処理(図3/STEP3参照)について説明する。
【0056】
まず、差分振動子出力要素231が、左右の股関節角度センサ202R,202Lの出力に基づき、股関節角度の差分の時間変化を表わす波形信号を差分振動子として出力する(図5/STEP31)。これにより、図6(a)に示されているような波形信号が差分振動子として得られる。なお、股関節角度の差分に代えて肩関節角度の差分の時間変化を表わす波形信号が差分振動子として出力されてもよい。
【0057】
続いて、窓処理要素232が、指定期間にわたる差分振動子に窓を掛ける(図5/STEP32)。窓関数としてはハン窓が用いられ、これにより図6(b)に破線で示されている指定期間にわたる差分振動子が、実線で示されているように変形される。窓関数としては、ハン窓のほか、矩形窓、ガウス窓、ハミング窓、ブラックマン窓、カイザー窓、バートレット窓又は指数窓などのさまざまな窓関数が用いられうる。
【0058】
窓処理要素232は、スペクトル解析処理要素234により決定された前回基本周波数f0(k-1)に基づき、当該基本周波数f0を変数とする減少関数にしたがって、今回の窓の幅w(k)を設定する。この減少関数はたとえば関係式(050)により定義される。係数w01及びw02は歩行周期が少なくとも2周期だけ含まれるように設定されている。なお、窓処理要素232は、初回の窓幅w(0)として、歩行周期が少なくとも2周期含まれるような定数を採用する。
【0059】
w(k)=w01/f0(k-1)+w02 ..(050)。
【0060】
窓処理要素232は、差分振動子(波形信号)をダウンサンプリングすることによって、差分振動子から第1指定周波数を超える高周波数成分を除去した上で、窓処理を実行してもよい。窓処理要素232は、差分振動子(波形信号)をハイパスフィルタに通すことにより、差分振動子から第2指定周波数以下の低周波成分を除去した上で、窓処理を実行してもよい。
【0061】
周波数解析処理要素233は、窓処理された今回指定期間における差分振動子をFFT等、周波数解析処理することにより、パワースペクトルを作成する(図5/STEP33)。これにより、図6(c)に示されているように周波数fが横軸で表わされ、周波数解析結果としてのパワーが縦軸で表わされているパワースペクトルが生成される。
【0062】
スペクトル解析処理要素234は、閾値以上の高さを有するとともに、最低の周波数帯域にあるピークの位置を表わす周波数を基本周波数f0として決定又は推定する(図5/STEP34)。閾値は、ノイズを除去する観点から、パワースペクトルにおけるピーク最高値の0.05〜0.20倍の範囲の値に設定される。これにより、図6(c)に示されているように、閾値pth以上の高さを有するピークP1及びP2のうち、最低の周波数帯域にあるピークP1の位置を表わす周波数が基本周波数f0として決定される。
【0063】
さらに、図6(d)に示されている曲線を表わす関係式(060)にしたがって基本周波数f0が補正されることにより、補正後基本周波数f0_dが決定される。
【0064】
f0_d=f0 (if f0≦fth), fth (if f0>fth) ..(060)。
【0065】
(歩行補助装置及び歩行状態推定装置の作用効果)
前記機能を発揮する基本周波数推定要素23によれば、人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号(差分振動子)が得られる(図5/STEP31、図6(a)参照)。また、この波形信号からパワースペクトルが得られる(図5/STEP33、図6(c)参照)。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす基本周波数f0を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。歩行状態は、基本周波数f0の逆数である推定歩行周期のほか、歩幅又は歩行率など、基本周波数f0に基づいて算定されうるあらゆる状態値によって表現される。
【0066】
また、前回の基本周波数f0(k-1)が高いほど今回の指定期間における波形信号に掛けられる今回窓の幅w(k)が狭く設定される一方、前回の基本周波数f0(k-1)が低いほど今回窓の幅w(k)が広く設定される。このため、今回の基本周波数f0(k)を推定する観点から、周波数解析の対象として過不足のない適当な幅の波形信号が抽出されうる(図5/STEP32、図6(b)参照)。
【0067】
さらに、歩行補助装置10によれば、アクチュエータ14の周期的な動作により、人間の各脚の周期的動作が補助される(図3/STEP6参照)。この際、人間の推定歩行状態を表わす基本周波数f0に基づき、アクチュエータ14の動作周期が定められる(関係式(023)及び(024)参照)。このため、前記のように基本周波数f0に基づいて高精度で推定される人間の歩行状態に鑑みて適当な周期で当該人間の歩行運動が補助されうる。
【0068】
(本発明の他の実施形態)
制御装置20は、左屈曲係数cL+、左伸展係数cL-、右屈曲係数cR+及び右伸展係数cR-のそれぞれの値の大小に応じて、人間の左大腿の屈曲運動及び伸展運動並びに右大腿の屈曲運動及び伸展運動のそれぞれを補助するためのアクチュエータ14の動作振幅の大小を制御するように構成されていれば、その構成は前記実施形態の構成に限定されない。アクチュエータ14L,14Rの動作周期は、固有角速度ωL、ωRに応じて2π/ωL、2π/ωRに一致するように制御されてもよい。
【0069】
たとえば、制御装置20は、左屈曲係数cL+、左伸展係数cL-、右屈曲係数cR+及び右伸展係数cR-のそれぞれの値を、左股関節角度の屈曲側目標値、左股関節角度の伸展側目標値、右股関節角度の屈曲側目標値及び右股関節角度の伸展側目標値のそれぞれとして、PID制御等のフィードバック制御則にしたがって、左右の股関節角度を制御するように構成されていてもよい。この場合、運動振動子出力要素21、状態振動子生成要素24及び制御振動子生成要素25は省略されてもよい。
【0070】
特許第3930399号、特許第3950149号、特許第4008464号又は特許第4271711号等の公報に記載されているように、ファン・デル・ポル方程式等により定義される第1モデルにしたがって第1振動子が生成され、かつ、当該第1振動子に基づいて固有角速度ω(連立微分方程式(010)参照)が設定された上で、当該固有角速度ωの逆数に比例するように時定数τ1が設定されてもよい。当該公報における「第2振動子」が本願発明における「状態振動子」に相当する。
【0071】
制御振動子ηは特許第4271711号等の公報に記載されているように、仮想的な弾性要素による弾性力及び仮想的な減衰要素による減衰力のうち一方又は両方を表わすように生成されてもよい。
【符号の説明】
【0072】
10‥歩行補助装置、11‥第1装具、12‥第2装具、14‥アクチュエータ、20‥制御装置、23‥基本周波数推定要素(歩行状態推定装置)、232‥窓処理要素、233‥周波数解析処理要素、234‥スペクトル解析処理要素。
【特許請求の範囲】
【請求項1】
歩行中の人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である差分振動子に窓を掛ける窓処理を実行するように構成されている窓処理要素と、
前記窓が掛けられた前記差分振動子を周波数解析することによりパワースペクトルを取得するように構成されている周波数解析処理要素と、
前記パワースペクトルにおいて閾値以上の高さを有するとともに、最低の周波数帯域に位置するピークを示す基本周波数を決定するように構成されているスペクトル解析処理要素とを備え、
前記窓処理要素は、前記スペクトル解析処理要素により決定された前回基本周波数に基づき、当該基本周波数を変数とする減少関数にしたがって、今回の前記窓の幅を設定するように構成されていることを特徴とする歩行状態推定装置。
【請求項2】
請求項1記載の歩行状態推定装置において、
前記窓処理要素が、前記差分振動子をダウンサンプリングすることによって、前記差分振動子から第1指定周波数を超える高周波数成分を除去した上で、前記窓処理を実行するように構成されていることを特徴とする歩行状態推定装置。
【請求項3】
請求項1又は2記載の歩行状態推定装置において、
前記窓処理要素が、前記差分振動子をハイパスフィルタに通すことにより、前記差分振動子から第2指定周波数以下の低周波成分を除去した上で、前記窓処理を実行するように構成されていることを特徴とする歩行状態推定装置。
【請求項4】
人間の上体に取り付けられる第1装具と、前記人間の左右の大腿のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている左股関節角度センサ及び右股関節角度センサと、少なくとも前記左股関節角度センサ及び前記右股関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、
前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の大腿の相対的な周期的運動を伴う前記人間の歩行運動を補助する装置であって、
前記左関節角度センサ及び前記右股関節角度センサを通じた前記人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である前記差分振動子を用いて、前記基本周波数を決定する請求項1〜3のうちいずれか1つに記載の歩行状態推定装置をさらに備え、
前記制御装置が、前記歩行状態推定装置により決定された前記基本周波数に応じて定まる周期にしたがって前記アクチュエータの周期的な動作を制御するように構成されていることを特徴とする歩行補助装置。
【請求項1】
歩行中の人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である差分振動子に窓を掛ける窓処理を実行するように構成されている窓処理要素と、
前記窓が掛けられた前記差分振動子を周波数解析することによりパワースペクトルを取得するように構成されている周波数解析処理要素と、
前記パワースペクトルにおいて閾値以上の高さを有するとともに、最低の周波数帯域に位置するピークを示す基本周波数を決定するように構成されているスペクトル解析処理要素とを備え、
前記窓処理要素は、前記スペクトル解析処理要素により決定された前回基本周波数に基づき、当該基本周波数を変数とする減少関数にしたがって、今回の前記窓の幅を設定するように構成されていることを特徴とする歩行状態推定装置。
【請求項2】
請求項1記載の歩行状態推定装置において、
前記窓処理要素が、前記差分振動子をダウンサンプリングすることによって、前記差分振動子から第1指定周波数を超える高周波数成分を除去した上で、前記窓処理を実行するように構成されていることを特徴とする歩行状態推定装置。
【請求項3】
請求項1又は2記載の歩行状態推定装置において、
前記窓処理要素が、前記差分振動子をハイパスフィルタに通すことにより、前記差分振動子から第2指定周波数以下の低周波成分を除去した上で、前記窓処理を実行するように構成されていることを特徴とする歩行状態推定装置。
【請求項4】
人間の上体に取り付けられる第1装具と、前記人間の左右の大腿のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている左股関節角度センサ及び右股関節角度センサと、少なくとも前記左股関節角度センサ及び前記右股関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、
前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の大腿の相対的な周期的運動を伴う前記人間の歩行運動を補助する装置であって、
前記左関節角度センサ及び前記右股関節角度センサを通じた前記人間の左右の股関節角度又は肩関節角度の差分の指定期間にわたるサンプリングにより得られる波形信号である前記差分振動子を用いて、前記基本周波数を決定する請求項1〜3のうちいずれか1つに記載の歩行状態推定装置をさらに備え、
前記制御装置が、前記歩行状態推定装置により決定された前記基本周波数に応じて定まる周期にしたがって前記アクチュエータの周期的な動作を制御するように構成されていることを特徴とする歩行補助装置。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−245211(P2012−245211A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−120201(P2011−120201)
【出願日】平成23年5月30日(2011.5.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月30日(2011.5.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]