
歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラム
【課題】リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出できるようにする。
【解決手段】スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
【解決手段】スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムに関し、例えば使用者の歩数を基に現在位置を推定するナビゲーション機能を有するスマートフォンに適用して好適なものである。
【背景技術】
【0002】
近年、携帯電話機に高度な演算処理能力を持たせたスマートフォンが普及しつつある。このスマートフォンでは、アプリケーションをインストールすることにより様々な機能を実現することができ、その一例としてナビゲーション機能がある。
【0003】
スマートフォンは、ナビゲーション機能を実行する場合、例えば内蔵するGPS(Global Positioning System)アンテナにより受信するGPS信号を基に現在位置を算出し、その近傍の地図画面を表示することができる。
【0004】
またスマートフォンは、GPS信号を受信できない屋内等では、例えば加速度センサによる加速度値の検出結果等を基に、使用者の移動方向及び移動距離を算出して現在位置を推定することができる。
【0005】
例えばスマートフォンは、使用者が歩いた際に3軸の加速度センサにより得られた加速度値のうち鉛直方向成分(以下これを鉛直加速度値と呼ぶ)を抽出し、その波形を基に使用者が歩行しているのか否か、及び歩行しているときの歩数等といった歩行状況に関する情報(以下これを歩行情報と呼ぶ)を得る。続いてスマートフォンは、得られた歩数に使用者の平均歩幅を乗算することにより移動距離を算出し、さらに移動方向も検出することにより、現在位置を推定する。
【0006】
ところで、使用者が歩行しているのか否か、或いは歩行しているときの歩数等の歩行情報を得る手法として、鉛直加速度値の信号波形に対し所定の解析処理を施すことにより歩数を得るものが知られている。
【0007】
しかしながらこの方法では、解析処理の原理上、ある程度(例えば10歩程度)歩いた後でなければ歩数を得ることができず、現在位置の算出が大幅に遅れてしまい、リアルタイム性に劣るという問題があった。
【0008】
このようなリアルタイム性の欠如は、単なる歩数計の場合にはそれほど問題にならない場合もあるが、ナビゲーション機能においては、使用者の現在位置を正しく反映できないことに繋がり、実用性を大きく損なうおそれがある。
【0009】
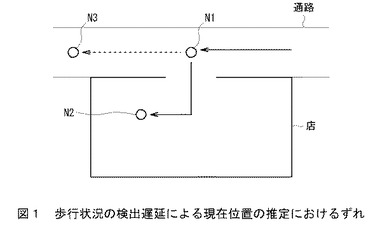
例えばスマートフォンにおいてナビゲーション機能の実行中に、図1に示すように使用者が通路を歩行した後に店の手前の地点N1において一度立ち止まり、その後再び歩行して、図中実線の矢印で示すように真の位置N2に移動したような場合を想定する。
【0010】
ここで歩行再開時における歩行状態の検出が遅れた場合、スマートフォンは、その間における移動方向の変化を現在位置の推定に反映できない可能性があり、この結果破線の矢印で示すように、位置N3のように誤った位置を現在位置として推定してしまう恐れがある。
【0011】
これに対し、鉛直加速度値に現れる波形の類似性を利用した演算により、歩行開始後直ちに使用者の歩行の状況を検出し、その歩数を得る手法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2007−244495公報(第18図)
【発明の概要】
【発明が解決しようとする課題】
【0013】
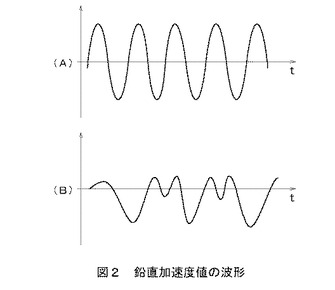
ところで、加速度センサにより検出される鉛直加速度値は、例えば図2(A)に示すようにほぼ一様な波形が周期的に現れる場合や、図2(B)に示すように大きさや形状が異なる波形が含まれる場合が考えられる。
【0014】
この場合スマートフォンは、得られた波形が1歩ごとの歩行を表すものであるか否かを判断することができず、歩行状況を正しく検出することが極めて困難である、という問題があった。
【0015】
本発明は以上の点を考慮してなされたもので、リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行状況を精度良く検出し得る歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムを提案しようとするものである。
【課題を解決するための手段】
【0016】
かかる課題を解決するため本発明おいては、使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得し、鉛直加速度値における下向き加速度を表す半波のうち使用者が着地したことを表す着地半波を検出し、着地半波と直前に検出された着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出し、着地半波長に対する着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には着地半波を2歩分と判定し、それ以外の場合には着地半波を1歩分と判定し、歩数判定部による判定結果に基づき、使用者の歩行状況を表す歩行情報を着地半波に対応させて出力するようにした。
【0017】
本発明では、着地半波を検出した上で着地半波長に対する着地半波間隔の比率を用いることにより、加速度値に現れる着地半波が1歩又は2歩のいずれに相当するかを直ちに精度良く判断することができるので、使用者の携帯箇所に関わらず、その1歩ずつに応じた適切な歩行情報を出力することができる。
【発明の効果】
【0018】
本発明によれば、着地半波を検出した上で着地半波長に対する着地半波間隔の比率を用いることにより、加速度値に現れる着地半波が1歩又は2歩のいずれに相当するかを直ちに精度良く判断することができるので、使用者の携帯箇所に関わらず、その1歩ずつに応じた適切な歩行情報を出力することができる。かくして本発明は、リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出し得る歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムを実現できる。
【図面の簡単な説明】
【0019】
【図1】歩行状況の検出遅延による現在位置の推定におけるずれを示す略線図である。
【図2】鉛直加速度値の波形を示す略線図である。
【図3】スマートフォンの構成を示す略線的ブロック図である。
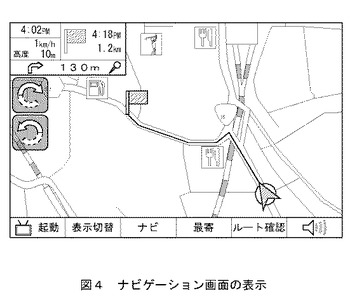
【図4】ナビゲーション画面の表示を示す略線図である。
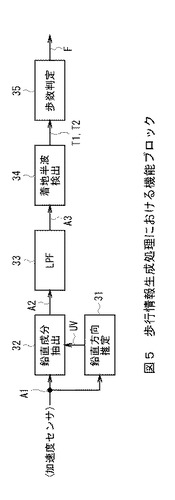
【図5】歩行情報生成処理における機能ブロックを示す略線的ブロック図である。
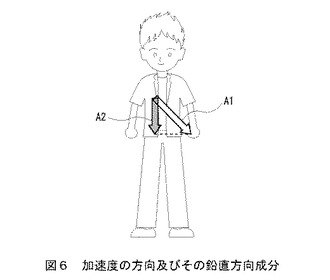
【図6】加速度の方向及びその鉛直方向成分を示す略線図である。
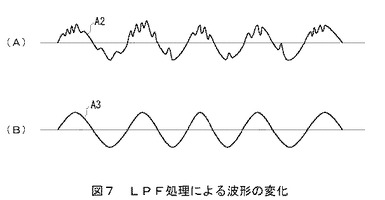
【図7】LPF処理による波形の変化を示す略線図である。
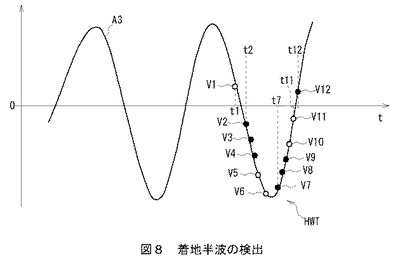
【図8】着地半波の検出を示す略線図である。
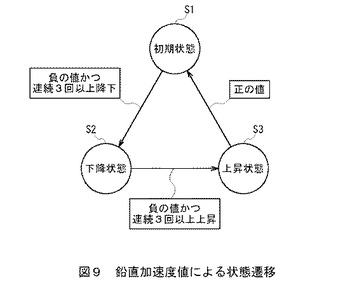
【図9】鉛直加速度値による状態遷移を示す略線図である。
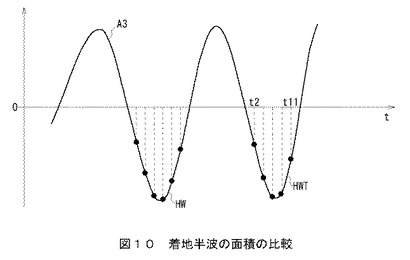
【図10】着地半波の面積の比較を示す略線図である。
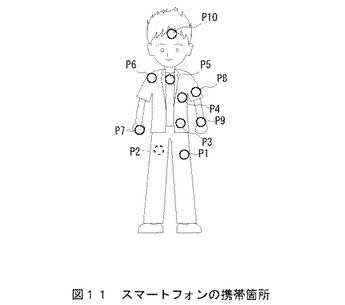
【図11】スマートフォンの携帯箇所を示す略線図である。
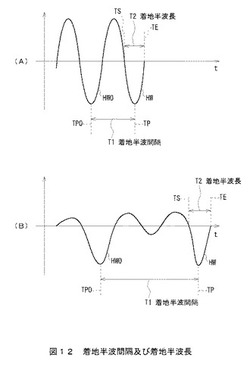
【図12】着地半波間隔及び着地半波長を示す略線図である。
【図13】携帯箇所ごとの着地半波比率の度数分布を示す略線図である。
【図14】歩行情報の出力タイミングを示す略線図である。
【図15】歩行情報生成処理手順を示すフローチャートである。
【図16】鉛直成分推定ルーチンを示すフローチャートである。
【図17】着地半波検出ルーチンを示すフローチャートである。
【図18】歩数判定出力ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0020】
以下、発明を実施するための形態(以下実施の形態とする)について、図面を用いて説明する。なお、説明は以下の順序で行う。
1.実施の形態
2.他の実施の形態
【0021】
<1.実施の形態>
[1−1.スマートフォンの構成]
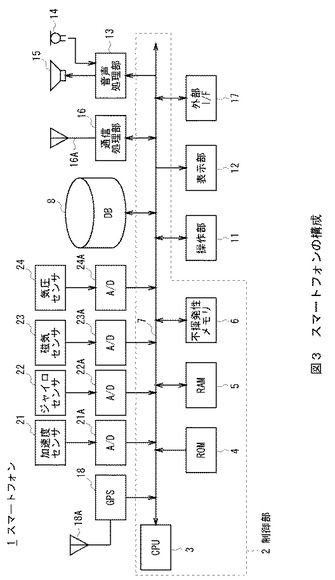
図3に示すように、スマートフォン1は、制御部2を中心として各部が接続された構成となっており、当該制御部2によって全体を統括制御するようになされている。
【0022】
制御部2のCPU(Central Processing Unit)3は、バス7を介してROM(Read Only Memory)4や不揮発性メモリ6等から基本プログラムや各種アプリケーションプログラム等を読み出し、RAM(Random Access Memory)5を作業領域として用いながら実行する。
【0023】
データベース(DB)8は、例えばフラッシュメモリ等でなり、電話帳データ、楽曲データ、画像データ及び地図データ等の各種データがそれぞれ所定のデータベース形式で格納されている。
【0024】
操作部11は、タッチパネルや各種ボタン等でなり、使用者の操作指示を受け付けて操作信号をCPU3へ供給する。表示部12は、例えば液晶パネルでなり、バス7を介して供給される表示データに基づいて表示画面を生成して表示する。因みに操作部11のタッチパネルは、表示部12の液晶パネルの表面に構成されている。
【0025】
音声処理部13は、マイクロホン14により集音した音声をディジタル形式の音声データに変換してバス7へ供給すると共に、当該バス7を介して取得した音声データを音声信号に変換してスピーカ15へ供給することにより、音声として出力する。
【0026】
通信処理部16は、アンテナ16Aを介して基地局(図示せず)との間で無線接続し、バス7を介して供給される各種データを基地局へ送信すると共に、基地局から送信されてきた各種データを受信してバス7へ供給する。
【0027】
外部インタフェース(I/F)17は、例えばUSB(Universal Serial Bus)端子でなり、USBケーブル(図示せず)を介して接続されるコンピュータ装置(図示せず)等との間でデータを授受するようになされている。
【0028】
GPS回路18は、GPS衛星(図示せず)から送信されるGPS信号をGPSアンテナ18Aにより受信し、所定の復調処理や復号化処理等を施して得られた測位データをバス7へ供給する。
【0029】
加速度センサ21は、互いに直交する3軸方向の加速度をそれぞれ検出して加速度信号を生成し、これをA/D(Analog/Digital)変換回路21Aにより25[Hz]のサンプリングレートでディジタル形式の加速度値A1に変換してバス7へ供給する。この加速度値A1は、スマートフォン1が使用者により携帯されている場合には、当該使用者の行動に応じて生じた加速度を表す値となる。
【0030】
ジャイロセンサ22は、互いに直交する3軸まわりの角速度を検出して角速度信号を生成し、これをA/D変換回路22Aにより所定のサンプリングレートでディジタル形式の角速度値に変換してバス7へ供給する。
【0031】
磁気センサ23は、磁界の方向を検出して磁気信号を生成し、これをA/D変換回路23Aにより所定のサンプリングレートでディジタル形式の磁気値に変換してバス7へ供給する。
【0032】
気圧センサ24は、気圧を検出して気圧信号を生成し、これをA/D変換回路24Aにより所定のサンプリングレートでディジタル形式の気圧値に変換してバス7へ供給する。
【0033】
かかる構成により制御部2は、例えば使用者から操作部11を介して通話機能の実行指示を受け付けると、所定の通話プログラムを実行すると共に、通信処理部16により基地局と無線接続し、マイクロホン14により集音した音声をデータ化して相手方へ送信すると共に、相手方から送信されてきた音声データをスピーカ15から出力させる。
【0034】
また制御部2は、使用者から操作部11を介して楽曲再生機能の実行指示を受け付けると、所定の楽曲再生プログラムを実行すると共に、データベース8から圧縮状態の楽曲データを読み出し、音声処理部13により所定の復号化処理等を施して、その音声をスピーカ15から出力させる。
【0035】
さらに制御部2は、例えば使用者から操作部11を介してナビゲーション機能の実行指示を受け付けると、所定のナビゲーションプログラムを実行すると共に、GPS回路18により得られる測位データを基に現在位置の緯度、経度及び高度等を算出する。
【0036】
そして制御部2は、図4に示すように、算出した現在位置に応じた範囲の地図データをデータベース8から読み出し、所定の現在位置マークや指定された目的地への経路と共にナビゲーション画面として表示部12に表示する。
【0037】
このとき制御部2は、加速度センサ21による加速度値A1、ジャイロセンサ22による角速度値、磁気センサ23による磁気値及び気圧センサ24による気圧値等を適宜利用することにより、現在位置を補正するようにもなされている。
【0038】
このようにスマートフォン1は、使用者の操作指示に従って種々のアプリケーションプログラムを実行することにより、通話機能、楽曲再生機能及びナビゲーション機能等の各種機能を実現するようになされている。
【0039】
[1−2.歩行情報の生成]
ところで制御部2は、上述したナビゲーション機能を実現する場合に、使用者の歩行状況として、使用者が歩行しているか否か、及び歩行している場合の歩数等を表す歩行情報を生成し、現在位置の推定に用いるようになされている。
【0040】
このとき制御部2は、歩行情報生成プログラムを実行することにより、図5に示すような複数の機能ブロックを構成し、使用者の行動に応じて生成される加速度値A1を基に、各機能ブロックによる処理を経て歩行情報Fを生成するようになされている。
【0041】
[1−2−1.鉛直加速度値の生成]
すなわち制御部2は、加速度センサ21(図3)により25[Hz]の周期で得られる加速度値A1を鉛直方向推定部31及び鉛直成分抽出部32へ順次供給する。
【0042】
鉛直方向推定部31及び鉛直成分抽出部32は、特許文献2に示されているような手法に従い、3次元のベクトル値である加速度値A1のうち鉛直方向の成分を抽出するようになされている。
【0043】
【特許文献2】特開2007−226371号公報
【0044】
具体的に鉛直方向推定部31は、過去3秒分の加速度値A1について平均値を算出し、その単位ベクトルを鉛直単位ベクトルUVとして鉛直成分抽出部32へ供給する。
【0045】
ここで各タイミングの加速度値A1については、スマートフォン1の向きや使用者の状態等に応じて様々な方向となるものの、携帯中における向きはほぼ一定になり、使用者に恒常的に加わる加速度としては重力が支配的であると想定される。このため、ある程度の期間における平均値を算出すれば、おおむね鉛直方向となると考えられる。
【0046】
鉛直成分抽出部32は、共に3次元である加速度値A1及び鉛直単位ベクトルUVの内積を演算することにより、図6に示すように当該加速度値A1の鉛直成分を抽出し、これを鉛直加速度値A2としてLPF部33へ供給する。ここで鉛直加速度値A2は、スマートフォン1に加わる鉛直方向の加速度を表す1次元の値となる。
【0047】
LPF(Low Pass Filter)部33は、IIR(Infinite Impulse Response)フィルタにより構成されており、図7(A)に示す鉛直加速度値A2のうち所定のカットオフ周波数以上の成分を除去することにより、図7(B)に示すような低域成分のみの鉛直加速度値A3を生成し、これを着地半波検出部34へ供給する。
【0048】
このようなLPF処理は、使用者の歩行の周期(以下歩行テンポTWと呼ぶ)が一般に1〜2[Hz]程度であり、以降の処理では主に低域成分が用いられるために行われる。
【0049】
[1−2−2.着地半波の検出]
着地半波抽出部34は、鉛直加速度値A3に含まれる波形のうち使用者の歩行に起因する部分を検出するようになされている。
【0050】
一般にスマートフォン1の使用者が歩行している場合、鉛直加速度値A3は、図7(B)に示したように周期的に正負に変動する波形を描き、特に使用者が足を着地したときにゼロレベル以下となる。
【0051】
また鉛直加速度値A3は、外部からの衝撃や使用者の操作等によりゼロレベル以下となる場合も想定されるが、このような場合にはその周期が短いか、或いはピークレベルが小さいと考えられる。
【0052】
そこで着地半波抽出部34は、ゼロレベル以下の負の半波に着目し、当該半波が所定の条件を満たす場合に、当該半波を歩行時の着地に起因した半波(以下これを着地半波HWと呼ぶ)であると判断するようになされている。
【0053】
また着地半波抽出部34は、鉛直加速度値A3の値に関する状態として、図9に示すように、値が負であり且つ下降した状態である下降状態S2、値が負であり且つ上昇した状態である上昇状態S3、及びそのいずれでもない初期状態S1に分類し、各状態の間を遷移するようになされている。
【0054】
具体的に着地半波抽出部34は、図7(B)と対応する図8に示すように、まず鉛直加速度値A3が減少しており、且つある時点t1において正の値V1であり、その次の時点t2において負の値V2となるような時点t2を検出する。このとき着地半波抽出部34は、時点t1では、初期状態S1(図9)とする。
【0055】
続いて着地半波抽出部34は、鉛直加速度値A3(図8)が値V2、V3及びV4のように負の値のまま時点t2から連続して3回以上減少したことを検出した場合、初期状態S1から下降状態S2に遷移する(図9)。また着地半波抽出部34は、最初に負となった時点t2をゼロクロス点とみなし、開始時刻TSとして記憶する。
【0056】
その後着地半波抽出部34は、鉛直加速度値A3(図8)が値V7、V8及びV9のように負の値のまま時点t7から連続して3回以上増加したことを検出した場合、下降状態S2から上昇状態S3に遷移する(図9)。また着地半波抽出部34は、最初に増加に転じた時点t7をピーク点とみなし、この時点t7を極値時刻TPとして記憶し、またこのときの値V7を極値VPとして記憶する。
【0057】
さらに着地半波抽出部34は、鉛直加速度値A3(図8)が値V12のように負から正になったことを検出した場合、再び初期状態S1(図9)に遷移すると共に、この時点t12をゼロクロス点と見なし、終了時刻TEとして記憶する。
【0058】
着地半波抽出部34は、このように初期状態S1、下降状態S2及び上昇状態S3を経て再び初期状態S1に戻ってきた場合、使用者の歩行における着地を表す可能性が高い負の半波を検出したものと見なす。以下、このようにして検出した半波を仮着地半波HWTと呼ぶ。
【0059】
次に着地半波抽出部34は、図10に示すように、仮着地半波HWTのうち値が負となる時点t2の値V2から時点t11の値V11までを加算することにより、仮着地半波HWTの面積に相当する値である仮面積値MTを算出する。そして着地半波抽出部34は、仮面積値MTが、過去の着地半波HWにおける面積の平均値である平均面積値MAの0.5倍以上であれば、仮着地半波HWTを正式な着地半波HWと判定する。
【0060】
このとき着地半波抽出部34は、仮面積値MTが極端に小さい場合には、仮着地半波HWTが使用者の歩行によるものではなく、外部からの衝撃等の他の要因による可能性が高いと考えられるため、このような面積を用いた判定処理を行うようになされている。
【0061】
このように着地半波抽出部34は、初期状態S1、下降状態S2及び上昇状態S3を経て再び初期状態S1に戻ってきた場合であって、且つその面積が過去の平均値の0.5倍以上である場合に、着地半波HWを検出したものと判定する。
【0062】
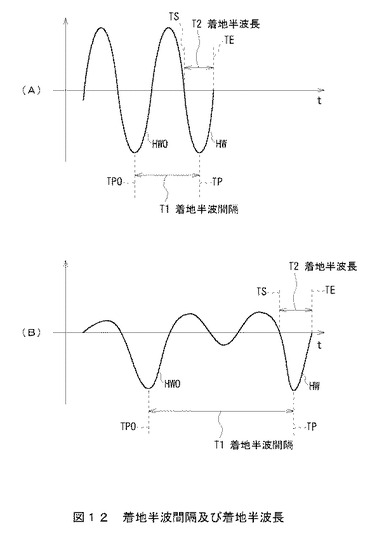
さらに着地半波抽出部34は、最後に検出した着地半波HWの極値時刻TPとその直前に検出した着地半波HW0の極値時刻TP0との時間間隔を着地半波間隔T1として算出する。また着地半波抽出部34は、最後に検出した着地半波HWにおける終了時刻TEと開始時刻TSとの時間間隔を着地半波長T2として算出する。そして着地半波抽出部34は、着地半波間隔T1及び着地半波長T2を歩数判定処理部35へ供給する。
【0063】
因みにこの着地半波間隔T1及び着地半波長T2は、後述する歩数判定処理において用いる値である。
【0064】
このように着地半波抽出部34は、着地半波HWを検出すると共に、当該着地半波HWについての特徴を表す値として着地半波間隔T1及び着地半波長T2を算出するようになされている。
【0065】
[1−2−3.歩数の判定]
ところで、使用者がスマートフォン1を携帯する際の携帯箇所としては、図11に示すように、例えばズボンの前後や左右におけるポケットに相当する携帯箇所P1及びP2や、上着の各部のポケットに相当する携帯箇所P3及びP4が考えられる。
【0066】
また、他の携帯箇所として、使用者がスマートフォン1をネックストラップにより首につり下げたときの携帯箇所P5やショルダーバッグに入れたときの携帯箇所P6、さらには手に持っている場合の携帯箇所P7等も考えられる。因みに携帯箇所P5及びP6は、実際のスマートフォン1の箇所ではなく、鉛直方向に関してその支持点となる箇所を表している。
【0067】
ここで鉛直加速度値A3に現れる負の半波について調査したところ、携帯箇所P3〜P7の場合、すなわち使用者がスマートフォン1を上半身に身に付けている場合には、図12(A)に示すように、鉛直加速度値A3にほぼ同じ大きさの半波が周期的に現れた。
【0068】
これは、左右の足それぞれの着地による垂直方向の力が上半身まで同程度に伝わってくるために、左右の足それぞれについての半波が同程度の大きさで現れるものと推察される。
【0069】
一方、携帯箇所P1及びP2の場合、すなわち使用者がスマートフォン1を下半身に身に付けている場合には、図12(B)に示すように、鉛直加速度値A3に比較的大きな半波と比較的小さな半波とが交互に現れた。
【0070】
これは、例えば使用者のズボンにおける右側のポケットにスマートフォン1が入っている場合、使用者が右足を着地したときには鉛直方向に大きな力が作用して比較的大きな半波が現れる一方、左足を着地したときには鉛直方向にあまり大きな力が作用せず比較的小さな半波が現れるためと推察される。
【0071】
この図12(B)の場合、前段の着地半波抽出部34では、比較的小さな半波について、左足による歩行に起因したものであるにも関わらず、他の要因による場合との区別が困難であるため、着地半波HWとしては検出できない。このため制御部2は、仮に着地半波HWの数をそのまま歩数とした場合、使用者の歩数を正しく検出できないことになる。
【0072】
ここで、着地半波間隔T1を着地半波長T2で除算した値(以下これを着地半波比率Rと呼ぶ)について検討する。
【0073】
仮に左右両方の足による着地が全て着地半波HWに現れる場合、鉛直加速度値A3の性質上、着地半波間隔T1がほぼ歩行テンポTWに相当し、着地半波長T2が歩行テンポTWの約半分に相当することから、着地半波比率Rの値は約2になると考えられる。
【0074】
一方、左右いずれか一方の足による着地のみが着地半波HWに現れる場合、着地半波間隔T1が歩行テンポTWの約2倍に相当し、着地半波長T2が歩行テンポTWの約半分に相当することから、着地半波比率Rの値は約4になると考えられる。
【0075】
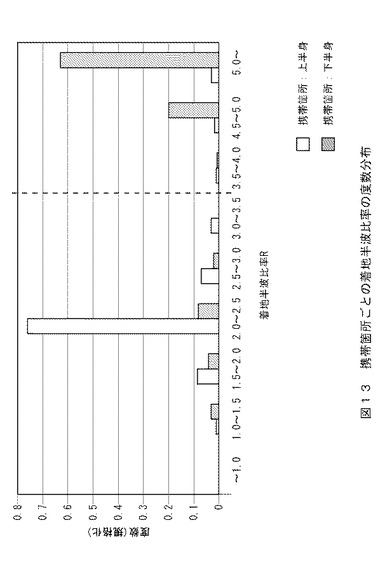
そこで、実際に使用者がスマートフォン1を身体の様々な携帯箇所(図11)に身に付けた場合における着地半波比率Rについて調査し、これを上半身と下半身とに分けて度数分布として集計したところ、図13に示すような度数分布特性が得られた。因みに図13では、度数を規格化しており、また着地半波比率Rの値を0.5刻みで集計している。
【0076】
図13からわかるように、上半身についての着地半波比率Rは、値2〜2.5となる場合が最も多いものの、他の値についても僅かずつ分布しており、いわば値2〜2.5を中心にやや広めに分布する傾向が現れている。
【0077】
これに対し下半身についての着地半波比率Rは、値4.5〜5.0及び5.0以上の範囲に集中しており、値3.0〜3.5及び3.5〜4.0の範囲には殆ど分布していない。
【0078】
ここで上半身についての着地半波比率Rの分布が比較的狭いのは、足からの距離が比較的近く、人体での力の伝達経路上における関節の数が比較的少ないためと考えられる。また、一般にズボンのポケットは比較的小さいため、スマートフォン1が当該ポケット内で自由に動き回る可能性が低く、身体とほぼ一体に動くためとも考えられる。
【0079】
一方、上半身についての着地半波比率Rの分布が比較的広いのは、足からの距離が比較的遠く、人体での力の伝達経路上における関節の数が比較的多いためと考えられる。また、一般に上着のポケットやバッグ等は比較的大きいため、スマートフォン1が当該ポケットやバッグ等の中で自由に動き回る可能性が高く、いわば暴れやすいためとも考えられる。
【0080】
このように着地半波比率Rの値については、上半身の場合と下半身の場合とでその分布範囲及び分布特性が異なることがわかる。そこで図13の度数分布特性から、着地半波比率Rの値を基に、スマートフォン1の携帯箇所を判定すると共に1個の着地半波HWに相当する歩数を判定するための比閾値THを3.5に定めた。
【0081】
すなわち歩数判定部35は、着地半波比率Rが比閾値TH以上であれば、スマートフォン1が下半身に身に付けられており1個の着地半波HWが2歩に相当するものと見なし、比閾値TH未満であれば、スマートフォン1が上半身に身に付けられており1個の着地半波HWが1歩に相当するものと見なすこととした。
【0082】
具体的に歩数判定部35は、着地半波HWの終了時刻TEにおいて、着地半波間隔T1を着地半波長T2で除算することにより着地半波比率Rを算出し、これを比閾値THと比較することにより、スマートフォン1の携帯箇所が上半身又は下半身のいずれであるか、すなわち着地半波HWが1歩又は2歩のいずれに相当するかを判定する。
【0083】
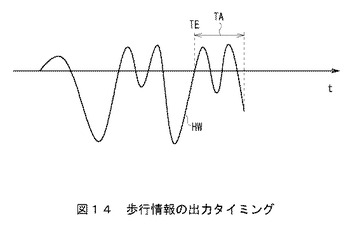
続いて歩数判定部35は、判定結果に関わらず、着地半波HWに対し1歩の歩数をカウントする。また歩数判定部35は、着地半波比率Rが比閾値TH以上であった場合のみ、図14に示すように、着地半波HWの終了時刻TEから過去の所定期間における平均歩行テンポTWA(すなわち1歩に要する平均時間)の経過後に、次の1歩をカウントする。
【0084】
さらに歩数判定部35は、判定した歩数(すなわち1歩又は2歩)で着地半波間隔T1を除算することにより、直前の歩行テンポTWを算出し、これを用いて平均歩行テンポTWAを更新する。
【0085】
また歩数判定部35は、1歩をカウントするごとに、最後に停止してから現在までの連続した歩行における歩数である連続歩数WCと、最後に初期化してから現在までの累積した歩数である累積歩数WSとを更新する。
【0086】
そして歩数判定部35は、使用者が歩行していることを表す歩行フラグLと、連続歩数WCと、累積歩数WSと、着地半波HWの極値VPと、歩行テンポTWと、平均歩行テンポTWAとを歩行情報Fとして、これをナビゲーションプログラム等の他のプログラムに引き渡す。
【0087】
これに応じてナビゲーションプログラム等は、例えば最後に現在位置を算出した後にGPS信号を受信できず、且つ歩行情報Fを取得した場合、連続歩数WCと使用者の平均的な歩幅とを乗算することにより移動距離を算出し、別途推定した移動方向と組み合わせることにより最新の現在位置を推定するようになされている。
【0088】
このように歩数判定部35は、着地半波比率Rと比閾値THとの比較結果に応じて、スマートフォン1が上半身又は下半身のいずれに身に付けられているか、すなわち着地半波HWが1歩又は2歩のいずれを表すかを判定して歩数をカウントするようになされている。
【0089】
[1−3.歩行情報生成処理]
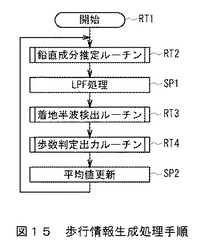
次に、スマートフォン1において使用者の歩行状況を表す歩行情報Fを生成するときの歩行情報生成処理手順について、図15〜図18のフローチャートを用いて詳細に説明する。
【0090】
スマートフォン1の制御部2は、ナビゲーション機能の実行指示等に応じて、不揮発性メモリ6(図3)から歩行情報生成プログラムを読み出して実行することにより図15の歩行情報生成処理手順RT1を開始し、鉛直成分推定ルーチンRT2へ移る。
【0091】
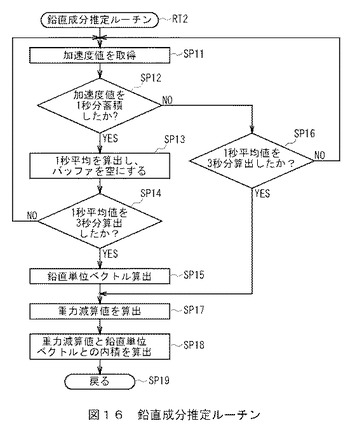
このとき制御部2は、図16の鉛直成分推定ルーチンRT2を開始してステップSP11へ移り、加速度センサ21から加速度値A1を取得して所定のバッファに蓄積し、次のステップSP12へ移る。
【0092】
ステップSP12において制御部2は、バッファに加速度値A1が1秒分(すなわち25サンプル)溜まったか否かを判定する。ここで肯定結果が得られると、制御部2は次のステップSP13へ移る。
【0093】
ステップSP13において制御部2は、1秒分の加速度値A1の平均値である1秒平均値A1Aを算出して記憶すると共にバッファを空にして、次のステップSP14へ移る。因みに1秒平均値A1Aは3次元のベクトル値となる。また制御部2は、直近の1秒平均値A1Aを最大で3個まで記憶するようになされている。
【0094】
ステップSP14において制御部2は、1秒平均値A1Aを既に3秒分算出したか否かを判定する。ここで否定結果が得られると、このことは鉛直単位ベクトルUVを算出するのに1秒平均値A1Aの数が不足していること、すなわち加速度値A1の蓄積数が不十分であることを表しており、このとき制御部2は再度ステップSP11へ戻る。
【0095】
一方、ステップSP14において肯定結果が得られると、制御部2は次のステップSP15へ移る。ステップSP15において制御部2は、3秒分の1秒平均値A1Aの平均値を算出し、これを鉛直単位ベクトルUVとして次のステップSP17へ移る。
【0096】
一方、ステップSP12において否定結果が得られると、このことは1秒平均を算出するには加速度値A1の蓄積数が不足していることを表しており、このとき制御部2は次のステップSP16へ移る。
【0097】
ステップSP16において制御部2は、加速度値A1の1秒平均値A1Aを3秒分算出したか否かを判定する。ここで否定結果が得られると、このことは未だ単位鉛直ベクトルUVを算出しておらず鉛直加速度値A2を算出し得ないことを表しており、このとき制御部2はさらに加速度値A1を蓄積するべくステップSP11へ戻る。
【0098】
一方、ステップSP16において肯定結果が得られると、このことは1秒平均値A1Aを算出するまでは加速度値A1が蓄積されていないものの、既に鉛直単位ベクトルUVを算出しているため鉛直加速度値A2を算出し得ることを表している。このため制御部2は、次のステップSP17へ移る。
【0099】
ステップSP17において制御部2は、最新の加速度値A1から鉛直単位ベクトルUVを減算することにより、当該加速度値A1から重力成分を除去した重力減算加速度値A1Gを算出し、次のステップSP18へ移る。
【0100】
ステップSP18において制御部2は、重力減算加速度値A1Gと鉛直単位ベクトルUVとの内積を算出することにより、1次元のベクトル値である鉛直加速度値A2を算出し、次のステップSP19へ移る。
【0101】
このように制御部2は、鉛直成分推定ルーチンRT2において、歩行情報生成プログラムの開始後3秒分の加速度値A1を蓄積してから鉛直単位ベクトルUVを算出し、それ以降は1秒毎に鉛直単位ベクトルUVを更新しながら、順次取得する加速度値A1を基に鉛直加速度値A2を算出する。
【0102】
ステップSP19において制御部2は元の歩行情報生成処理手順RT1(図15)へ戻り、次のステップSP1へ移る。
【0103】
ステップSP1において制御部2は、鉛直加速度値A2のうち所定のカットオフ周波数以上の成分を除去することにより鉛直加速度値A3を生成し(図7)、次の着地半波検出ルーチンRT3へ移る。
【0104】
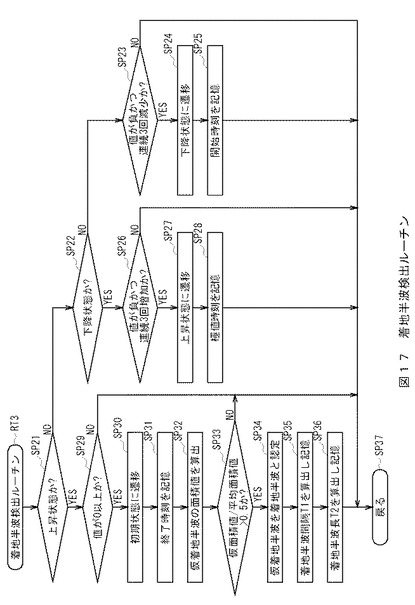
このとき制御部2は、図17の着地半波検出ルーチンRT3を開始してステップSP21へ移り、鉛直加速度値A3が上昇状態S3(図9)にあるか否かを判定する。ここで否定結果が得られると、制御部2は次のステップSP22へ移る。
【0105】
ステップSP22において制御部2は、鉛直加速度値A3が下降状態S2(図9)にあるか否かを判定する。ここで否定結果が得られると、このことは鉛直加速度値A3が初期状態S1(図9)にあることを表しており、このとき制御部2は、下降状態S2へ遷移するタイミングを検出するべく、次のステップSP23へ移る。
【0106】
ステップSP23において制御部2は、図8の値V2、V3及びV4のように、鉛直加速度値A3の値が負であり、且つ連続して3回減少しているか否かを判定する。
【0107】
ここで否定結果が得られると、このことは鉛直加速度値A3について初期状態S1(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0108】
これに対しステップSP23において肯定結果が得られると、制御部2は次のステップSP24へ移り、初期状態S1から下降状態S2へ遷移して(図9)、次のステップSP25へ移る。
【0109】
ステップSP25において制御部2は、最初に負となった時点(図8における時点t2)を開始時刻TSとして記憶した後、今度は上昇状態S3(図9)への遷移を検出するために次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0110】
一方、ステップSP22において肯定結果が得られると、このことは既に初期状態S1から下降状態S2に遷移したことを表しており(図9)、このとき制御部2は次のステップSP26へ移る。
【0111】
ステップSP26において制御部2は、図8の値V7、V8及びV9のように、鉛直加速度値A3の値が負であり、且つ連続して3回増加しているか否かを判定する。
【0112】
ここで否定結果が得られると、このことは鉛直加速度値A3について下降状態S2(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0113】
これに対しステップSP26において肯定結果が得られると、制御部2は次のステップSP27へ移り、下降状態S2から上昇状態S3へ遷移して(図9)、次のステップSP28へ移る。
【0114】
ステップSP28において制御部2は、最初に増加に転じた時点(図8における時点t7)を極値時刻TPとして記憶すると共にこのときの値V7を極値VPとして記憶し、今度は初期状態S1(図9)への遷移を検出するために次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0115】
一方、ステップSP21において肯定結果が得られると、このことは既に初期状態S1から下降状態S2を経て上昇状態S3に遷移したことを表しており(図9)、このとき制御部2は次のステップSP29へ移る。
【0116】
ステップSP29において制御部2は、鉛直加速度値A3の値が0以上であるか否かを判定する。ここで否定結果が得られると、このことは鉛直加速度値A3について上昇状態S3(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0117】
これに対しステップSP29において肯定結果が得られると、このことは図8の値V12のように、鉛直加速度値A3が負の値から0又は正の値になったことを表している。このとき制御部2は、次のステップSP30へ移り、上昇状態S3から初期状態S1へ遷移して(図9)、次のステップSP31へ移る。
【0118】
ステップSP31において制御部2は、このときの時刻(図8における時点t12)を終了時刻TEとして記憶し、次のステップSP32へ移る。この場合、開始時刻TSから終了時刻TEまでの負の半波が仮着地半波HWT(図8)となる。
【0119】
ステップSP32において制御部2は、仮着地半波HWTの面積である仮面積値MTを算出して記憶し(図10)、次のステップSP33へ移る。
【0120】
ステップSP33において制御部2は、仮面積値MTが平均面積値MAの0.5倍以上であるか否かを判定する。ここで否定結果が得られると、このことは仮面積値MTが極端に小さいことから仮着地半波HWTが歩行以外の要因により生じた波形であると見なし得ることを表している。このとき制御部2は、次の仮着地半波HWTを検出するべく、次のステップSP37へ移る。
【0121】
これに対しステップSP33において肯定結果が得られると、このことは仮着地半波HWTの仮面積値MTが十分に大きいことを表しており、このとき制御部2は次のステップSP34へ移る。
【0122】
ステップSP34において制御部2は、仮着地半波HWTを着地半波HWとして認定し、次のステップSP35へ移る。
【0123】
ステップSP35において制御部2は、最後に検出した着地半波HWの極値時刻TPとその直前に検出した着地半波HW0の極値時刻TP0との時間間隔を着地半波間隔T1(図12)として算出すると共に記憶し、次のステップSP36へ移る。
【0124】
ステップSP36において制御部2は、最後に検出した着地半波HWにおける終了時刻TEと開始時刻TSとの時間間隔を着地半波長T2(図12)として算出すると共に記憶し、次のステップSP37へ移る。
【0125】
ステップSP37において制御部2は、元の歩行情報生成処理手順RT1(図15)へ戻り、次の歩数判定出力ルーチンRT4へ移る。
【0126】
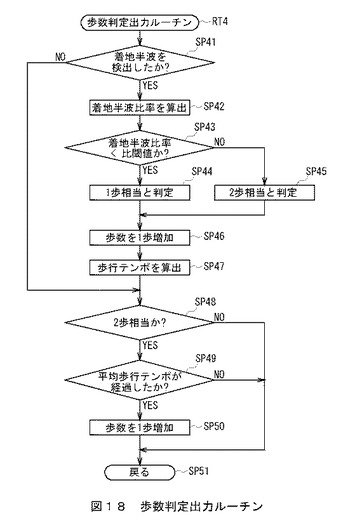
このとき制御部2は、図18の歩数判定出力ルーチンRT4を開始してステップSP41へ移る。ステップSP41において制御部2は、直前の着地半波検出ルーチンRT3において着地半波HWを検出したか否かを判定する。ここで肯定結果が得られると、このことは着地半波HWを検出したことに伴い歩数のカウント処理を行う必要があることを表しており、このとき制御部2は次のステップSP42へ移る。
【0127】
ステップSP42において制御部2は、着地半波間隔T1を着地半波長T2で除算することにより着地半波比率Rを算出し、次のステップSP43へ移る。
【0128】
ステップSP43において制御部2は、当該着地半波比率Rが比閾値TH(すなわち3.5)未満であるか否かを判定する。ここで否定結果が得られると、制御部2は次のステップSP44へ移る。
【0129】
ステップSP44において制御部2は、着地半波比率Rが比閾値TH未満であることからスマートフォン1の携帯箇所が使用者の上半身であり、検出した着地半波HWが1歩に相当するものと判定し、次のステップSP46へ移る。
【0130】
これに対しステップSP43において否定結果が得られると、制御部2は次のステップSP45へ移る。ステップSP45において制御部2は、着地半波比率Rが比閾値TH以上であることからスマートフォン1の携帯箇所が使用者の下半身であり、検出した着地半波HWが2歩に相当するものと判定し、次のステップSP46へ移る。
【0131】
ステップSP46において制御部2は、判定した歩数に関わらず、連続歩数WC及び累積歩数WSの値を1歩増加させると共に歩行情報Fを生成して出力し、次のステップSP47へ移る。
【0132】
ステップSP47において制御部2は、着地半波間隔T1及び判定した歩数を基に直前の歩行テンポTWを算出して次のステップSP48へ移る。
【0133】
一方、ステップSP41において否定結果が得られると、このことはこの処理サイクル(図15における1回のループ)では着地半波HWを検出していないため1歩目のカウントに関する処理を行う必要が無いことを表しており、このとき制御部2は次のステップSP48へ移る。
【0134】
ステップSP48において制御部2は、最後に検出した着地半波HWについて2歩に相当すると判定したか否かを判定する。ここで肯定結果が得られると、このことは最後に検出した着地半波HWに応じてもう1歩分をカウントする必要があることを表しており、このとき制御部2は次のステップSP49へ移る。
【0135】
ステップSP49において制御部2は、最後に検出した着地半波HWの終了時刻TEから平均歩行テンポTWAに相当する時間が経過したか否かを判定する。ここで否定結果が得られると、このことは未だ次の1歩をカウントすべきタイミングではないことを表しており、このとき制御部2は次のステップSP51へ移る。
【0136】
これに対しステップSP49において肯定結果が得られると、制御部2は次のステップSP50へ移り、2歩目のカウント処理として、連続歩数WC及び累積歩数WSの値を1歩増加させると共に歩行情報Fを生成して出力し、次のステップSP51へ移る。
【0137】
一方、ステップSP48において否定結果が得られると、このことは最後に検出した着地半波HWについて2歩目をカウントする必要が無いことを表しており、このとき制御部2は次のステップSP51へ移る。
【0138】
ステップSP51において制御部2は、元の歩行情報生成処理手順RT1(図15)へ戻り、次のステップSP2へ移る。
【0139】
ステップSP2において制御部2は、最後に算出した仮面積値MTを用いて平均面積値MAを更新すると共に、最後に算出した歩行テンポTWを用いて平均歩行テンポTWAを更新して、再度鉛直成分推定ルーチンRT2へ戻る。
【0140】
このように制御部2は、加速度センサ21(図3)による加速度値A1が生成される周期(すなわち25[Hz])で歩行情報生成処理手順RT1を繰り返すことにより、使用者が歩行し始めたときに直ちにその1歩を検出して歩行情報Fを生成するようになされている。
【0141】
[1−4.動作及び効果]
以上の構成において、スマートフォン1の制御部2は、加速度値A1からその鉛直方向成分である鉛直加速度値A3を生成し、当該鉛直加速度値A3の波形を基に着地半波HWを検出する。
【0142】
続いて制御部2は、当該着地半波HWを検出したタイミングで、着地半波間隔T1及び着地半波長T2を算出した上で、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出し、これを比閾値THと比較する。
【0143】
ここで制御部2は、着地半波比率Rが比閾値TH未満であれば、スマートフォン1の携帯箇所が使用者の上半身であり着地半波HWが1歩に相当するものと判定する。一方制御部2は、着地半波比率Rが比閾値TH以上であれば、スマートフォン1の携帯箇所が使用者の下半身であり、検出した着地半波HWが2歩に相当するものと判定する。
【0144】
そして制御部2は、直ちに連続歩数WC及び累積歩数WS等の値を更新すると共に歩行情報Fを生成して他のプログラム等へ引き渡す。
【0145】
従って制御部2は、鉛直加速度値A3を基に、スマートフォン1を携帯している使用者が歩行したことを、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、その1歩目から検出することができる。
【0146】
このとき制御部2は、着地半波比率Rの度数分布の傾向が上半身と下半身とで大きく異なることを利用し(図13)、適切に定めた比閾値TH(すなわち3.5)と当該着地半波比率Rとの大小関係から、着地半波HWが使用者の1歩又は2歩のいずれに相当するかを精度良く判定することができる。
【0147】
また制御部2は、鉛直加速度値A3に含まれる負の半波のうち、「初期状態S1、下降状態S2、上昇状態S3、初期状態S1」といった一連の状態遷移(図9)を経て、且つその面積がある程度大きい場合(図10)のみ着地半波HWとして検出する。
【0148】
ここで、携帯箇所が下半身である場合には(図12(B)等)、携帯箇所と反対側の足が着地したときの半波が極めて小さく、外力等の他の要因による半波と類似しているため、使用者の歩行に起因したものであることを正しく判定することは極めて難しい。
【0149】
この点において制御部2は、着地半波検出ルーチンRT3(図17)により、スマートフォン1の携帯箇所が上半身であるときの両足の着地による半波、及び下半身であるときの携帯箇所側の足の着地による半波のみを着地半波HWとして検出する。
【0150】
このため制御部2は、他の要因による半波や、携帯箇所と反対側の足が着地したときの半波(すなわち他の要因による半波と区別が難しい半波)については除外することができ、足の着地によるものである確実性が高い半波のみを着地半波HWとすることができる。この場合、携帯箇所と反対側の足が着地したときの半波を除外することについては、着地半波比率Rを基に着地半波HWを2歩相当と判定することにより、歩数のカウントを適切に補うことができる。
【0151】
さらに制御部2は、着地半波HWの判定において用いる仮面積値MTについて、鉛直加速度値A3を加算するだけでこれに相当する値を算出することができるため、複雑な演算が必要な共相関を用いる場合等と比較して、その演算負荷を大幅に削減することができ、リアルタイム性を高めることができる。
【0152】
以上の構成によれば、スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
【0153】
<2.他の実施の形態>
なお上述した実施の形態においては、上半身及び下半身それぞれの着地半波比率Rの度数分布特性(図13)を基に、比閾値THの値を3.5とするようにした場合について述べた。
【0154】
本発明はこれに限らず、例えば両分布における最頻値同士の中間値や、近似曲線を描いたときの交点となる値とする等、上半身及び下半身それぞれの着地半波比率Rについての種々の性質や特性等を基に比閾値THの値を定めるようにしても良い。この場合、要はスマートフォン1の携帯箇所を判定すると共に1個の着地半波HWに相当する歩数を判定するのに適した値であれば良い。
【0155】
また上述した実施の形態においては、着地半波比率Rが比閾値TH以上であり1個の着地半波HWを2歩に相当すると判定した場合に、まず1歩をカウントした後、歩行テンポTWの経過後に次の1歩をカウントするようにした場合について述べた。
【0156】
本発明はこれに限らず、例えばナビゲーション画面において1歩ごとの表示の更新まではしないような場合に、着地半波HWの検出時又は歩行テンポTWの経過後に、2歩まとめてカウントするようにしても良い。
【0157】
さらに上述した実施の形態においては、「初期状態S1、下降状態S2、上昇状態S3、初期状態S1」といった一連の状態遷移(図9)を経て、且つその面積がある程度大きい場合(図10)のみ着地半波HWとして検出するようにした場合について述べた。
【0158】
本発明はこれに限らず、例えば特許文献1に開示されているように共相関を用いるようにし、或いは極値VPが所定の閾値を越えることや極値時刻TP同士の間隔が一定の範囲であることを要件とし、さらにはこれらを組み合わせる等、種々の要件により着地半波HWを検出するようにしても良い。またこの場合、各閾値を固定値とするのみでなく、過去の極値VPや平均歩行テンポTWA等を基に随時更新するようにしても良い。
【0159】
この場合、要は、スマートフォン1の携帯箇所が上半身であるときの両足の着地による半波、及び下半身であるときの携帯箇所側の足の着地による半波のみを着地半波HWとして検出できれば良い。
【0160】
さらに上述した実施の形態においては、着地半波HWの極値時刻TPと直前の着地半波HW0の極値時刻TP0との間隔を着地半波間隔T1とするようにした場合について述べた。
【0161】
本発明はこれに限らず、例えば着地半波HW及び直前の着地半波HW0それぞれの開始時刻TS同士の間隔や終了時刻TE同士の間隔等、両半波において対比の対象となり得るような特徴点同士の時間間隔を着地半波間隔T1とするようにしても良い。
【0162】
さらに上述した実施の形態においては、3次元の加速度値A1を基に鉛直単位ベクトルUVを生成し、これと加速度値A1との内積を1次元の鉛直加速度値A2とし、さらにその低域成分を鉛直加速度値A3とするようにした場合について述べた。
【0163】
本発明はこれに限らず、加速度値A1を基に種々の演算を行うことにより鉛直加速度値A3を生成するようにし、或いは鉛直方向の加速度を検出し得る鉛直加速度センサから直接的に鉛直加速度値A2を取得し、その低域成分を鉛直加速度値A3とする等、種々の手法により鉛直加速度値A3を取得するようにしても良い。
【0164】
さらに上述した実施の形態においては、鉛直成分推定ルーチンRT2(図16)において、1秒平均値A1Aを3秒分蓄積してから鉛直加速度値A2を算出するようにした場合について述べた。
【0165】
本発明はこれに限らず、1秒平均値A1Aを1.5秒分、5秒分や10秒分など、他の任意の秒数分だけ蓄積してから鉛直加速度値A2を算出するようにしても良い。また1秒平均値A1Aに代えて、例えば0.5秒分の平均値である0.5秒平均値のような任意の期間の平均値を用いるようにしても良い。
【0166】
さらに上述した実施の形態においては、地図データをデータベース8に記憶させておき、当該データベース8から地図データを読み出してナビゲーション画面の表示処理等を行う場合について述べた。
【0167】
本発明はこれに限らず、例えばインターネット等のネットワーク上に地図データを記憶する地図サーバを設けておき、通信処理部16からアンテナ16Aを介して基地局と通信接続することにより当該地図サーバにアクセスし、地図データを取得してナビゲーション画面の表示処理等を行うようにしても良い。またこの場合、経路探索処理や画面生成処理等の演算処理についても、地図サーバや他のサーバ等において実行するようにしても良い。
【0168】
さらに上述した実施の形態においては、制御部2が不揮発性メモリ6から歩行情報生成プログラムを読み出して実行することにより、図5に示した各種機能をソフトウェアにより実現するようにした場合について述べた。
【0169】
本発明はこれに限らず、図5に示した各種機能をハードウェアにより実現しても良く、さらには機能ごとにソフトウェア及びハードウェアを混在させるようにしても良い。
【0170】
さらに上述した実施の形態においては、情報処理装置としてのスマートフォン1において、制御部2が、不揮発性メモリ6に予め格納されている歩行情報生成プログラムを読み出して実行するようにした場合について述べた。
【0171】
本発明はこれに限らず、例えば制御部2が通信処理部16や外部インタフェース17等を介して外部から取得した歩行情報生成プログラムを不揮発性メモリ6等にインストールして実行するようにしても良い。
【0172】
さらに上述した実施の形態においては、本発明をスマートフォン1に適用するようにした場合について述べた。しかしながら本発明はこれに限らず、例えば携帯型ナビゲーション装置や、携帯型音楽再生装置、ディジタルカメラ、或いは携帯型ゲーム機等のように、使用者に携帯されその歩行状況を検出してナビゲーション機能や歩数計機能等に利用する種々の携帯型電子機器に適用するようにしても良い。
【0173】
例えば携帯型音楽再生装置の場合、アームバンドやリストバンド等により使用者の腕や手首を携帯箇所P8及びP9(図11)とし、或いはヘッドフォン一体型の場合に頭部を携帯箇所P10とすることも考えられるが、この場合も携帯箇所P3〜P7と同様に上半身として扱えば良い。
【0174】
さらに上述した実施の形態においては、取得部としての加速度センサ21、鉛直方向推定部31及び鉛直成分抽出部32と、着地半波検出部及び間隔検出部としての着地半波検出部34と、歩数判定部及び出力部としての歩数判定部35とによって歩行状況検出装置としてのスマートフォン1を構成する場合について述べた。
【0175】
本発明はこれに限らず、その他種々の構成でなる取得部と、着地半波検出部と、間隔検出部と、歩数判定部と、出力部とによって歩行状況検出装置を構成するようにしても良い。
【産業上の利用可能性】
【0176】
本発明は、使用者に携帯される種々の携帯型電子機器でも利用できる。
【符号の説明】
【0177】
1……スマートフォン、2……制御部、6……不揮発性メモリ、21……加速度センサ、31……鉛直方向推定部、32……鉛直成分抽出部、34……着地半波検出部、35……歩数判定部、A1……加速度値、A3……鉛直加速度値、HW……着地半波、VP……極値、TS……開始時刻、TP……極値時刻、TE……終了時刻、T1……着地半波間隔、T2……着地半波長、R……着地半波比率、TH……比閾値、F……歩行情報。
【技術分野】
【0001】
本発明は歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムに関し、例えば使用者の歩数を基に現在位置を推定するナビゲーション機能を有するスマートフォンに適用して好適なものである。
【背景技術】
【0002】
近年、携帯電話機に高度な演算処理能力を持たせたスマートフォンが普及しつつある。このスマートフォンでは、アプリケーションをインストールすることにより様々な機能を実現することができ、その一例としてナビゲーション機能がある。
【0003】
スマートフォンは、ナビゲーション機能を実行する場合、例えば内蔵するGPS(Global Positioning System)アンテナにより受信するGPS信号を基に現在位置を算出し、その近傍の地図画面を表示することができる。
【0004】
またスマートフォンは、GPS信号を受信できない屋内等では、例えば加速度センサによる加速度値の検出結果等を基に、使用者の移動方向及び移動距離を算出して現在位置を推定することができる。
【0005】
例えばスマートフォンは、使用者が歩いた際に3軸の加速度センサにより得られた加速度値のうち鉛直方向成分(以下これを鉛直加速度値と呼ぶ)を抽出し、その波形を基に使用者が歩行しているのか否か、及び歩行しているときの歩数等といった歩行状況に関する情報(以下これを歩行情報と呼ぶ)を得る。続いてスマートフォンは、得られた歩数に使用者の平均歩幅を乗算することにより移動距離を算出し、さらに移動方向も検出することにより、現在位置を推定する。
【0006】
ところで、使用者が歩行しているのか否か、或いは歩行しているときの歩数等の歩行情報を得る手法として、鉛直加速度値の信号波形に対し所定の解析処理を施すことにより歩数を得るものが知られている。
【0007】
しかしながらこの方法では、解析処理の原理上、ある程度(例えば10歩程度)歩いた後でなければ歩数を得ることができず、現在位置の算出が大幅に遅れてしまい、リアルタイム性に劣るという問題があった。
【0008】
このようなリアルタイム性の欠如は、単なる歩数計の場合にはそれほど問題にならない場合もあるが、ナビゲーション機能においては、使用者の現在位置を正しく反映できないことに繋がり、実用性を大きく損なうおそれがある。
【0009】
例えばスマートフォンにおいてナビゲーション機能の実行中に、図1に示すように使用者が通路を歩行した後に店の手前の地点N1において一度立ち止まり、その後再び歩行して、図中実線の矢印で示すように真の位置N2に移動したような場合を想定する。
【0010】
ここで歩行再開時における歩行状態の検出が遅れた場合、スマートフォンは、その間における移動方向の変化を現在位置の推定に反映できない可能性があり、この結果破線の矢印で示すように、位置N3のように誤った位置を現在位置として推定してしまう恐れがある。
【0011】
これに対し、鉛直加速度値に現れる波形の類似性を利用した演算により、歩行開始後直ちに使用者の歩行の状況を検出し、その歩数を得る手法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2007−244495公報(第18図)
【発明の概要】
【発明が解決しようとする課題】
【0013】
ところで、加速度センサにより検出される鉛直加速度値は、例えば図2(A)に示すようにほぼ一様な波形が周期的に現れる場合や、図2(B)に示すように大きさや形状が異なる波形が含まれる場合が考えられる。
【0014】
この場合スマートフォンは、得られた波形が1歩ごとの歩行を表すものであるか否かを判断することができず、歩行状況を正しく検出することが極めて困難である、という問題があった。
【0015】
本発明は以上の点を考慮してなされたもので、リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行状況を精度良く検出し得る歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムを提案しようとするものである。
【課題を解決するための手段】
【0016】
かかる課題を解決するため本発明おいては、使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得し、鉛直加速度値における下向き加速度を表す半波のうち使用者が着地したことを表す着地半波を検出し、着地半波と直前に検出された着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出し、着地半波長に対する着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には着地半波を2歩分と判定し、それ以外の場合には着地半波を1歩分と判定し、歩数判定部による判定結果に基づき、使用者の歩行状況を表す歩行情報を着地半波に対応させて出力するようにした。
【0017】
本発明では、着地半波を検出した上で着地半波長に対する着地半波間隔の比率を用いることにより、加速度値に現れる着地半波が1歩又は2歩のいずれに相当するかを直ちに精度良く判断することができるので、使用者の携帯箇所に関わらず、その1歩ずつに応じた適切な歩行情報を出力することができる。
【発明の効果】
【0018】
本発明によれば、着地半波を検出した上で着地半波長に対する着地半波間隔の比率を用いることにより、加速度値に現れる着地半波が1歩又は2歩のいずれに相当するかを直ちに精度良く判断することができるので、使用者の携帯箇所に関わらず、その1歩ずつに応じた適切な歩行情報を出力することができる。かくして本発明は、リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出し得る歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラムを実現できる。
【図面の簡単な説明】
【0019】
【図1】歩行状況の検出遅延による現在位置の推定におけるずれを示す略線図である。
【図2】鉛直加速度値の波形を示す略線図である。
【図3】スマートフォンの構成を示す略線的ブロック図である。
【図4】ナビゲーション画面の表示を示す略線図である。
【図5】歩行情報生成処理における機能ブロックを示す略線的ブロック図である。
【図6】加速度の方向及びその鉛直方向成分を示す略線図である。
【図7】LPF処理による波形の変化を示す略線図である。
【図8】着地半波の検出を示す略線図である。
【図9】鉛直加速度値による状態遷移を示す略線図である。
【図10】着地半波の面積の比較を示す略線図である。
【図11】スマートフォンの携帯箇所を示す略線図である。
【図12】着地半波間隔及び着地半波長を示す略線図である。
【図13】携帯箇所ごとの着地半波比率の度数分布を示す略線図である。
【図14】歩行情報の出力タイミングを示す略線図である。
【図15】歩行情報生成処理手順を示すフローチャートである。
【図16】鉛直成分推定ルーチンを示すフローチャートである。
【図17】着地半波検出ルーチンを示すフローチャートである。
【図18】歩数判定出力ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0020】
以下、発明を実施するための形態(以下実施の形態とする)について、図面を用いて説明する。なお、説明は以下の順序で行う。
1.実施の形態
2.他の実施の形態
【0021】
<1.実施の形態>
[1−1.スマートフォンの構成]
図3に示すように、スマートフォン1は、制御部2を中心として各部が接続された構成となっており、当該制御部2によって全体を統括制御するようになされている。
【0022】
制御部2のCPU(Central Processing Unit)3は、バス7を介してROM(Read Only Memory)4や不揮発性メモリ6等から基本プログラムや各種アプリケーションプログラム等を読み出し、RAM(Random Access Memory)5を作業領域として用いながら実行する。
【0023】
データベース(DB)8は、例えばフラッシュメモリ等でなり、電話帳データ、楽曲データ、画像データ及び地図データ等の各種データがそれぞれ所定のデータベース形式で格納されている。
【0024】
操作部11は、タッチパネルや各種ボタン等でなり、使用者の操作指示を受け付けて操作信号をCPU3へ供給する。表示部12は、例えば液晶パネルでなり、バス7を介して供給される表示データに基づいて表示画面を生成して表示する。因みに操作部11のタッチパネルは、表示部12の液晶パネルの表面に構成されている。
【0025】
音声処理部13は、マイクロホン14により集音した音声をディジタル形式の音声データに変換してバス7へ供給すると共に、当該バス7を介して取得した音声データを音声信号に変換してスピーカ15へ供給することにより、音声として出力する。
【0026】
通信処理部16は、アンテナ16Aを介して基地局(図示せず)との間で無線接続し、バス7を介して供給される各種データを基地局へ送信すると共に、基地局から送信されてきた各種データを受信してバス7へ供給する。
【0027】
外部インタフェース(I/F)17は、例えばUSB(Universal Serial Bus)端子でなり、USBケーブル(図示せず)を介して接続されるコンピュータ装置(図示せず)等との間でデータを授受するようになされている。
【0028】
GPS回路18は、GPS衛星(図示せず)から送信されるGPS信号をGPSアンテナ18Aにより受信し、所定の復調処理や復号化処理等を施して得られた測位データをバス7へ供給する。
【0029】
加速度センサ21は、互いに直交する3軸方向の加速度をそれぞれ検出して加速度信号を生成し、これをA/D(Analog/Digital)変換回路21Aにより25[Hz]のサンプリングレートでディジタル形式の加速度値A1に変換してバス7へ供給する。この加速度値A1は、スマートフォン1が使用者により携帯されている場合には、当該使用者の行動に応じて生じた加速度を表す値となる。
【0030】
ジャイロセンサ22は、互いに直交する3軸まわりの角速度を検出して角速度信号を生成し、これをA/D変換回路22Aにより所定のサンプリングレートでディジタル形式の角速度値に変換してバス7へ供給する。
【0031】
磁気センサ23は、磁界の方向を検出して磁気信号を生成し、これをA/D変換回路23Aにより所定のサンプリングレートでディジタル形式の磁気値に変換してバス7へ供給する。
【0032】
気圧センサ24は、気圧を検出して気圧信号を生成し、これをA/D変換回路24Aにより所定のサンプリングレートでディジタル形式の気圧値に変換してバス7へ供給する。
【0033】
かかる構成により制御部2は、例えば使用者から操作部11を介して通話機能の実行指示を受け付けると、所定の通話プログラムを実行すると共に、通信処理部16により基地局と無線接続し、マイクロホン14により集音した音声をデータ化して相手方へ送信すると共に、相手方から送信されてきた音声データをスピーカ15から出力させる。
【0034】
また制御部2は、使用者から操作部11を介して楽曲再生機能の実行指示を受け付けると、所定の楽曲再生プログラムを実行すると共に、データベース8から圧縮状態の楽曲データを読み出し、音声処理部13により所定の復号化処理等を施して、その音声をスピーカ15から出力させる。
【0035】
さらに制御部2は、例えば使用者から操作部11を介してナビゲーション機能の実行指示を受け付けると、所定のナビゲーションプログラムを実行すると共に、GPS回路18により得られる測位データを基に現在位置の緯度、経度及び高度等を算出する。
【0036】
そして制御部2は、図4に示すように、算出した現在位置に応じた範囲の地図データをデータベース8から読み出し、所定の現在位置マークや指定された目的地への経路と共にナビゲーション画面として表示部12に表示する。
【0037】
このとき制御部2は、加速度センサ21による加速度値A1、ジャイロセンサ22による角速度値、磁気センサ23による磁気値及び気圧センサ24による気圧値等を適宜利用することにより、現在位置を補正するようにもなされている。
【0038】
このようにスマートフォン1は、使用者の操作指示に従って種々のアプリケーションプログラムを実行することにより、通話機能、楽曲再生機能及びナビゲーション機能等の各種機能を実現するようになされている。
【0039】
[1−2.歩行情報の生成]
ところで制御部2は、上述したナビゲーション機能を実現する場合に、使用者の歩行状況として、使用者が歩行しているか否か、及び歩行している場合の歩数等を表す歩行情報を生成し、現在位置の推定に用いるようになされている。
【0040】
このとき制御部2は、歩行情報生成プログラムを実行することにより、図5に示すような複数の機能ブロックを構成し、使用者の行動に応じて生成される加速度値A1を基に、各機能ブロックによる処理を経て歩行情報Fを生成するようになされている。
【0041】
[1−2−1.鉛直加速度値の生成]
すなわち制御部2は、加速度センサ21(図3)により25[Hz]の周期で得られる加速度値A1を鉛直方向推定部31及び鉛直成分抽出部32へ順次供給する。
【0042】
鉛直方向推定部31及び鉛直成分抽出部32は、特許文献2に示されているような手法に従い、3次元のベクトル値である加速度値A1のうち鉛直方向の成分を抽出するようになされている。
【0043】
【特許文献2】特開2007−226371号公報
【0044】
具体的に鉛直方向推定部31は、過去3秒分の加速度値A1について平均値を算出し、その単位ベクトルを鉛直単位ベクトルUVとして鉛直成分抽出部32へ供給する。
【0045】
ここで各タイミングの加速度値A1については、スマートフォン1の向きや使用者の状態等に応じて様々な方向となるものの、携帯中における向きはほぼ一定になり、使用者に恒常的に加わる加速度としては重力が支配的であると想定される。このため、ある程度の期間における平均値を算出すれば、おおむね鉛直方向となると考えられる。
【0046】
鉛直成分抽出部32は、共に3次元である加速度値A1及び鉛直単位ベクトルUVの内積を演算することにより、図6に示すように当該加速度値A1の鉛直成分を抽出し、これを鉛直加速度値A2としてLPF部33へ供給する。ここで鉛直加速度値A2は、スマートフォン1に加わる鉛直方向の加速度を表す1次元の値となる。
【0047】
LPF(Low Pass Filter)部33は、IIR(Infinite Impulse Response)フィルタにより構成されており、図7(A)に示す鉛直加速度値A2のうち所定のカットオフ周波数以上の成分を除去することにより、図7(B)に示すような低域成分のみの鉛直加速度値A3を生成し、これを着地半波検出部34へ供給する。
【0048】
このようなLPF処理は、使用者の歩行の周期(以下歩行テンポTWと呼ぶ)が一般に1〜2[Hz]程度であり、以降の処理では主に低域成分が用いられるために行われる。
【0049】
[1−2−2.着地半波の検出]
着地半波抽出部34は、鉛直加速度値A3に含まれる波形のうち使用者の歩行に起因する部分を検出するようになされている。
【0050】
一般にスマートフォン1の使用者が歩行している場合、鉛直加速度値A3は、図7(B)に示したように周期的に正負に変動する波形を描き、特に使用者が足を着地したときにゼロレベル以下となる。
【0051】
また鉛直加速度値A3は、外部からの衝撃や使用者の操作等によりゼロレベル以下となる場合も想定されるが、このような場合にはその周期が短いか、或いはピークレベルが小さいと考えられる。
【0052】
そこで着地半波抽出部34は、ゼロレベル以下の負の半波に着目し、当該半波が所定の条件を満たす場合に、当該半波を歩行時の着地に起因した半波(以下これを着地半波HWと呼ぶ)であると判断するようになされている。
【0053】
また着地半波抽出部34は、鉛直加速度値A3の値に関する状態として、図9に示すように、値が負であり且つ下降した状態である下降状態S2、値が負であり且つ上昇した状態である上昇状態S3、及びそのいずれでもない初期状態S1に分類し、各状態の間を遷移するようになされている。
【0054】
具体的に着地半波抽出部34は、図7(B)と対応する図8に示すように、まず鉛直加速度値A3が減少しており、且つある時点t1において正の値V1であり、その次の時点t2において負の値V2となるような時点t2を検出する。このとき着地半波抽出部34は、時点t1では、初期状態S1(図9)とする。
【0055】
続いて着地半波抽出部34は、鉛直加速度値A3(図8)が値V2、V3及びV4のように負の値のまま時点t2から連続して3回以上減少したことを検出した場合、初期状態S1から下降状態S2に遷移する(図9)。また着地半波抽出部34は、最初に負となった時点t2をゼロクロス点とみなし、開始時刻TSとして記憶する。
【0056】
その後着地半波抽出部34は、鉛直加速度値A3(図8)が値V7、V8及びV9のように負の値のまま時点t7から連続して3回以上増加したことを検出した場合、下降状態S2から上昇状態S3に遷移する(図9)。また着地半波抽出部34は、最初に増加に転じた時点t7をピーク点とみなし、この時点t7を極値時刻TPとして記憶し、またこのときの値V7を極値VPとして記憶する。
【0057】
さらに着地半波抽出部34は、鉛直加速度値A3(図8)が値V12のように負から正になったことを検出した場合、再び初期状態S1(図9)に遷移すると共に、この時点t12をゼロクロス点と見なし、終了時刻TEとして記憶する。
【0058】
着地半波抽出部34は、このように初期状態S1、下降状態S2及び上昇状態S3を経て再び初期状態S1に戻ってきた場合、使用者の歩行における着地を表す可能性が高い負の半波を検出したものと見なす。以下、このようにして検出した半波を仮着地半波HWTと呼ぶ。
【0059】
次に着地半波抽出部34は、図10に示すように、仮着地半波HWTのうち値が負となる時点t2の値V2から時点t11の値V11までを加算することにより、仮着地半波HWTの面積に相当する値である仮面積値MTを算出する。そして着地半波抽出部34は、仮面積値MTが、過去の着地半波HWにおける面積の平均値である平均面積値MAの0.5倍以上であれば、仮着地半波HWTを正式な着地半波HWと判定する。
【0060】
このとき着地半波抽出部34は、仮面積値MTが極端に小さい場合には、仮着地半波HWTが使用者の歩行によるものではなく、外部からの衝撃等の他の要因による可能性が高いと考えられるため、このような面積を用いた判定処理を行うようになされている。
【0061】
このように着地半波抽出部34は、初期状態S1、下降状態S2及び上昇状態S3を経て再び初期状態S1に戻ってきた場合であって、且つその面積が過去の平均値の0.5倍以上である場合に、着地半波HWを検出したものと判定する。
【0062】
さらに着地半波抽出部34は、最後に検出した着地半波HWの極値時刻TPとその直前に検出した着地半波HW0の極値時刻TP0との時間間隔を着地半波間隔T1として算出する。また着地半波抽出部34は、最後に検出した着地半波HWにおける終了時刻TEと開始時刻TSとの時間間隔を着地半波長T2として算出する。そして着地半波抽出部34は、着地半波間隔T1及び着地半波長T2を歩数判定処理部35へ供給する。
【0063】
因みにこの着地半波間隔T1及び着地半波長T2は、後述する歩数判定処理において用いる値である。
【0064】
このように着地半波抽出部34は、着地半波HWを検出すると共に、当該着地半波HWについての特徴を表す値として着地半波間隔T1及び着地半波長T2を算出するようになされている。
【0065】
[1−2−3.歩数の判定]
ところで、使用者がスマートフォン1を携帯する際の携帯箇所としては、図11に示すように、例えばズボンの前後や左右におけるポケットに相当する携帯箇所P1及びP2や、上着の各部のポケットに相当する携帯箇所P3及びP4が考えられる。
【0066】
また、他の携帯箇所として、使用者がスマートフォン1をネックストラップにより首につり下げたときの携帯箇所P5やショルダーバッグに入れたときの携帯箇所P6、さらには手に持っている場合の携帯箇所P7等も考えられる。因みに携帯箇所P5及びP6は、実際のスマートフォン1の箇所ではなく、鉛直方向に関してその支持点となる箇所を表している。
【0067】
ここで鉛直加速度値A3に現れる負の半波について調査したところ、携帯箇所P3〜P7の場合、すなわち使用者がスマートフォン1を上半身に身に付けている場合には、図12(A)に示すように、鉛直加速度値A3にほぼ同じ大きさの半波が周期的に現れた。
【0068】
これは、左右の足それぞれの着地による垂直方向の力が上半身まで同程度に伝わってくるために、左右の足それぞれについての半波が同程度の大きさで現れるものと推察される。
【0069】
一方、携帯箇所P1及びP2の場合、すなわち使用者がスマートフォン1を下半身に身に付けている場合には、図12(B)に示すように、鉛直加速度値A3に比較的大きな半波と比較的小さな半波とが交互に現れた。
【0070】
これは、例えば使用者のズボンにおける右側のポケットにスマートフォン1が入っている場合、使用者が右足を着地したときには鉛直方向に大きな力が作用して比較的大きな半波が現れる一方、左足を着地したときには鉛直方向にあまり大きな力が作用せず比較的小さな半波が現れるためと推察される。
【0071】
この図12(B)の場合、前段の着地半波抽出部34では、比較的小さな半波について、左足による歩行に起因したものであるにも関わらず、他の要因による場合との区別が困難であるため、着地半波HWとしては検出できない。このため制御部2は、仮に着地半波HWの数をそのまま歩数とした場合、使用者の歩数を正しく検出できないことになる。
【0072】
ここで、着地半波間隔T1を着地半波長T2で除算した値(以下これを着地半波比率Rと呼ぶ)について検討する。
【0073】
仮に左右両方の足による着地が全て着地半波HWに現れる場合、鉛直加速度値A3の性質上、着地半波間隔T1がほぼ歩行テンポTWに相当し、着地半波長T2が歩行テンポTWの約半分に相当することから、着地半波比率Rの値は約2になると考えられる。
【0074】
一方、左右いずれか一方の足による着地のみが着地半波HWに現れる場合、着地半波間隔T1が歩行テンポTWの約2倍に相当し、着地半波長T2が歩行テンポTWの約半分に相当することから、着地半波比率Rの値は約4になると考えられる。
【0075】
そこで、実際に使用者がスマートフォン1を身体の様々な携帯箇所(図11)に身に付けた場合における着地半波比率Rについて調査し、これを上半身と下半身とに分けて度数分布として集計したところ、図13に示すような度数分布特性が得られた。因みに図13では、度数を規格化しており、また着地半波比率Rの値を0.5刻みで集計している。
【0076】
図13からわかるように、上半身についての着地半波比率Rは、値2〜2.5となる場合が最も多いものの、他の値についても僅かずつ分布しており、いわば値2〜2.5を中心にやや広めに分布する傾向が現れている。
【0077】
これに対し下半身についての着地半波比率Rは、値4.5〜5.0及び5.0以上の範囲に集中しており、値3.0〜3.5及び3.5〜4.0の範囲には殆ど分布していない。
【0078】
ここで上半身についての着地半波比率Rの分布が比較的狭いのは、足からの距離が比較的近く、人体での力の伝達経路上における関節の数が比較的少ないためと考えられる。また、一般にズボンのポケットは比較的小さいため、スマートフォン1が当該ポケット内で自由に動き回る可能性が低く、身体とほぼ一体に動くためとも考えられる。
【0079】
一方、上半身についての着地半波比率Rの分布が比較的広いのは、足からの距離が比較的遠く、人体での力の伝達経路上における関節の数が比較的多いためと考えられる。また、一般に上着のポケットやバッグ等は比較的大きいため、スマートフォン1が当該ポケットやバッグ等の中で自由に動き回る可能性が高く、いわば暴れやすいためとも考えられる。
【0080】
このように着地半波比率Rの値については、上半身の場合と下半身の場合とでその分布範囲及び分布特性が異なることがわかる。そこで図13の度数分布特性から、着地半波比率Rの値を基に、スマートフォン1の携帯箇所を判定すると共に1個の着地半波HWに相当する歩数を判定するための比閾値THを3.5に定めた。
【0081】
すなわち歩数判定部35は、着地半波比率Rが比閾値TH以上であれば、スマートフォン1が下半身に身に付けられており1個の着地半波HWが2歩に相当するものと見なし、比閾値TH未満であれば、スマートフォン1が上半身に身に付けられており1個の着地半波HWが1歩に相当するものと見なすこととした。
【0082】
具体的に歩数判定部35は、着地半波HWの終了時刻TEにおいて、着地半波間隔T1を着地半波長T2で除算することにより着地半波比率Rを算出し、これを比閾値THと比較することにより、スマートフォン1の携帯箇所が上半身又は下半身のいずれであるか、すなわち着地半波HWが1歩又は2歩のいずれに相当するかを判定する。
【0083】
続いて歩数判定部35は、判定結果に関わらず、着地半波HWに対し1歩の歩数をカウントする。また歩数判定部35は、着地半波比率Rが比閾値TH以上であった場合のみ、図14に示すように、着地半波HWの終了時刻TEから過去の所定期間における平均歩行テンポTWA(すなわち1歩に要する平均時間)の経過後に、次の1歩をカウントする。
【0084】
さらに歩数判定部35は、判定した歩数(すなわち1歩又は2歩)で着地半波間隔T1を除算することにより、直前の歩行テンポTWを算出し、これを用いて平均歩行テンポTWAを更新する。
【0085】
また歩数判定部35は、1歩をカウントするごとに、最後に停止してから現在までの連続した歩行における歩数である連続歩数WCと、最後に初期化してから現在までの累積した歩数である累積歩数WSとを更新する。
【0086】
そして歩数判定部35は、使用者が歩行していることを表す歩行フラグLと、連続歩数WCと、累積歩数WSと、着地半波HWの極値VPと、歩行テンポTWと、平均歩行テンポTWAとを歩行情報Fとして、これをナビゲーションプログラム等の他のプログラムに引き渡す。
【0087】
これに応じてナビゲーションプログラム等は、例えば最後に現在位置を算出した後にGPS信号を受信できず、且つ歩行情報Fを取得した場合、連続歩数WCと使用者の平均的な歩幅とを乗算することにより移動距離を算出し、別途推定した移動方向と組み合わせることにより最新の現在位置を推定するようになされている。
【0088】
このように歩数判定部35は、着地半波比率Rと比閾値THとの比較結果に応じて、スマートフォン1が上半身又は下半身のいずれに身に付けられているか、すなわち着地半波HWが1歩又は2歩のいずれを表すかを判定して歩数をカウントするようになされている。
【0089】
[1−3.歩行情報生成処理]
次に、スマートフォン1において使用者の歩行状況を表す歩行情報Fを生成するときの歩行情報生成処理手順について、図15〜図18のフローチャートを用いて詳細に説明する。
【0090】
スマートフォン1の制御部2は、ナビゲーション機能の実行指示等に応じて、不揮発性メモリ6(図3)から歩行情報生成プログラムを読み出して実行することにより図15の歩行情報生成処理手順RT1を開始し、鉛直成分推定ルーチンRT2へ移る。
【0091】
このとき制御部2は、図16の鉛直成分推定ルーチンRT2を開始してステップSP11へ移り、加速度センサ21から加速度値A1を取得して所定のバッファに蓄積し、次のステップSP12へ移る。
【0092】
ステップSP12において制御部2は、バッファに加速度値A1が1秒分(すなわち25サンプル)溜まったか否かを判定する。ここで肯定結果が得られると、制御部2は次のステップSP13へ移る。
【0093】
ステップSP13において制御部2は、1秒分の加速度値A1の平均値である1秒平均値A1Aを算出して記憶すると共にバッファを空にして、次のステップSP14へ移る。因みに1秒平均値A1Aは3次元のベクトル値となる。また制御部2は、直近の1秒平均値A1Aを最大で3個まで記憶するようになされている。
【0094】
ステップSP14において制御部2は、1秒平均値A1Aを既に3秒分算出したか否かを判定する。ここで否定結果が得られると、このことは鉛直単位ベクトルUVを算出するのに1秒平均値A1Aの数が不足していること、すなわち加速度値A1の蓄積数が不十分であることを表しており、このとき制御部2は再度ステップSP11へ戻る。
【0095】
一方、ステップSP14において肯定結果が得られると、制御部2は次のステップSP15へ移る。ステップSP15において制御部2は、3秒分の1秒平均値A1Aの平均値を算出し、これを鉛直単位ベクトルUVとして次のステップSP17へ移る。
【0096】
一方、ステップSP12において否定結果が得られると、このことは1秒平均を算出するには加速度値A1の蓄積数が不足していることを表しており、このとき制御部2は次のステップSP16へ移る。
【0097】
ステップSP16において制御部2は、加速度値A1の1秒平均値A1Aを3秒分算出したか否かを判定する。ここで否定結果が得られると、このことは未だ単位鉛直ベクトルUVを算出しておらず鉛直加速度値A2を算出し得ないことを表しており、このとき制御部2はさらに加速度値A1を蓄積するべくステップSP11へ戻る。
【0098】
一方、ステップSP16において肯定結果が得られると、このことは1秒平均値A1Aを算出するまでは加速度値A1が蓄積されていないものの、既に鉛直単位ベクトルUVを算出しているため鉛直加速度値A2を算出し得ることを表している。このため制御部2は、次のステップSP17へ移る。
【0099】
ステップSP17において制御部2は、最新の加速度値A1から鉛直単位ベクトルUVを減算することにより、当該加速度値A1から重力成分を除去した重力減算加速度値A1Gを算出し、次のステップSP18へ移る。
【0100】
ステップSP18において制御部2は、重力減算加速度値A1Gと鉛直単位ベクトルUVとの内積を算出することにより、1次元のベクトル値である鉛直加速度値A2を算出し、次のステップSP19へ移る。
【0101】
このように制御部2は、鉛直成分推定ルーチンRT2において、歩行情報生成プログラムの開始後3秒分の加速度値A1を蓄積してから鉛直単位ベクトルUVを算出し、それ以降は1秒毎に鉛直単位ベクトルUVを更新しながら、順次取得する加速度値A1を基に鉛直加速度値A2を算出する。
【0102】
ステップSP19において制御部2は元の歩行情報生成処理手順RT1(図15)へ戻り、次のステップSP1へ移る。
【0103】
ステップSP1において制御部2は、鉛直加速度値A2のうち所定のカットオフ周波数以上の成分を除去することにより鉛直加速度値A3を生成し(図7)、次の着地半波検出ルーチンRT3へ移る。
【0104】
このとき制御部2は、図17の着地半波検出ルーチンRT3を開始してステップSP21へ移り、鉛直加速度値A3が上昇状態S3(図9)にあるか否かを判定する。ここで否定結果が得られると、制御部2は次のステップSP22へ移る。
【0105】
ステップSP22において制御部2は、鉛直加速度値A3が下降状態S2(図9)にあるか否かを判定する。ここで否定結果が得られると、このことは鉛直加速度値A3が初期状態S1(図9)にあることを表しており、このとき制御部2は、下降状態S2へ遷移するタイミングを検出するべく、次のステップSP23へ移る。
【0106】
ステップSP23において制御部2は、図8の値V2、V3及びV4のように、鉛直加速度値A3の値が負であり、且つ連続して3回減少しているか否かを判定する。
【0107】
ここで否定結果が得られると、このことは鉛直加速度値A3について初期状態S1(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0108】
これに対しステップSP23において肯定結果が得られると、制御部2は次のステップSP24へ移り、初期状態S1から下降状態S2へ遷移して(図9)、次のステップSP25へ移る。
【0109】
ステップSP25において制御部2は、最初に負となった時点(図8における時点t2)を開始時刻TSとして記憶した後、今度は上昇状態S3(図9)への遷移を検出するために次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0110】
一方、ステップSP22において肯定結果が得られると、このことは既に初期状態S1から下降状態S2に遷移したことを表しており(図9)、このとき制御部2は次のステップSP26へ移る。
【0111】
ステップSP26において制御部2は、図8の値V7、V8及びV9のように、鉛直加速度値A3の値が負であり、且つ連続して3回増加しているか否かを判定する。
【0112】
ここで否定結果が得られると、このことは鉛直加速度値A3について下降状態S2(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0113】
これに対しステップSP26において肯定結果が得られると、制御部2は次のステップSP27へ移り、下降状態S2から上昇状態S3へ遷移して(図9)、次のステップSP28へ移る。
【0114】
ステップSP28において制御部2は、最初に増加に転じた時点(図8における時点t7)を極値時刻TPとして記憶すると共にこのときの値V7を極値VPとして記憶し、今度は初期状態S1(図9)への遷移を検出するために次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0115】
一方、ステップSP21において肯定結果が得られると、このことは既に初期状態S1から下降状態S2を経て上昇状態S3に遷移したことを表しており(図9)、このとき制御部2は次のステップSP29へ移る。
【0116】
ステップSP29において制御部2は、鉛直加速度値A3の値が0以上であるか否かを判定する。ここで否定結果が得られると、このことは鉛直加速度値A3について上昇状態S3(図9)のまま変化していないことを表している。このため制御部2は、次の鉛直加速度値A3を取得するべく、次のステップSP37へ移る。
【0117】
これに対しステップSP29において肯定結果が得られると、このことは図8の値V12のように、鉛直加速度値A3が負の値から0又は正の値になったことを表している。このとき制御部2は、次のステップSP30へ移り、上昇状態S3から初期状態S1へ遷移して(図9)、次のステップSP31へ移る。
【0118】
ステップSP31において制御部2は、このときの時刻(図8における時点t12)を終了時刻TEとして記憶し、次のステップSP32へ移る。この場合、開始時刻TSから終了時刻TEまでの負の半波が仮着地半波HWT(図8)となる。
【0119】
ステップSP32において制御部2は、仮着地半波HWTの面積である仮面積値MTを算出して記憶し(図10)、次のステップSP33へ移る。
【0120】
ステップSP33において制御部2は、仮面積値MTが平均面積値MAの0.5倍以上であるか否かを判定する。ここで否定結果が得られると、このことは仮面積値MTが極端に小さいことから仮着地半波HWTが歩行以外の要因により生じた波形であると見なし得ることを表している。このとき制御部2は、次の仮着地半波HWTを検出するべく、次のステップSP37へ移る。
【0121】
これに対しステップSP33において肯定結果が得られると、このことは仮着地半波HWTの仮面積値MTが十分に大きいことを表しており、このとき制御部2は次のステップSP34へ移る。
【0122】
ステップSP34において制御部2は、仮着地半波HWTを着地半波HWとして認定し、次のステップSP35へ移る。
【0123】
ステップSP35において制御部2は、最後に検出した着地半波HWの極値時刻TPとその直前に検出した着地半波HW0の極値時刻TP0との時間間隔を着地半波間隔T1(図12)として算出すると共に記憶し、次のステップSP36へ移る。
【0124】
ステップSP36において制御部2は、最後に検出した着地半波HWにおける終了時刻TEと開始時刻TSとの時間間隔を着地半波長T2(図12)として算出すると共に記憶し、次のステップSP37へ移る。
【0125】
ステップSP37において制御部2は、元の歩行情報生成処理手順RT1(図15)へ戻り、次の歩数判定出力ルーチンRT4へ移る。
【0126】
このとき制御部2は、図18の歩数判定出力ルーチンRT4を開始してステップSP41へ移る。ステップSP41において制御部2は、直前の着地半波検出ルーチンRT3において着地半波HWを検出したか否かを判定する。ここで肯定結果が得られると、このことは着地半波HWを検出したことに伴い歩数のカウント処理を行う必要があることを表しており、このとき制御部2は次のステップSP42へ移る。
【0127】
ステップSP42において制御部2は、着地半波間隔T1を着地半波長T2で除算することにより着地半波比率Rを算出し、次のステップSP43へ移る。
【0128】
ステップSP43において制御部2は、当該着地半波比率Rが比閾値TH(すなわち3.5)未満であるか否かを判定する。ここで否定結果が得られると、制御部2は次のステップSP44へ移る。
【0129】
ステップSP44において制御部2は、着地半波比率Rが比閾値TH未満であることからスマートフォン1の携帯箇所が使用者の上半身であり、検出した着地半波HWが1歩に相当するものと判定し、次のステップSP46へ移る。
【0130】
これに対しステップSP43において否定結果が得られると、制御部2は次のステップSP45へ移る。ステップSP45において制御部2は、着地半波比率Rが比閾値TH以上であることからスマートフォン1の携帯箇所が使用者の下半身であり、検出した着地半波HWが2歩に相当するものと判定し、次のステップSP46へ移る。
【0131】
ステップSP46において制御部2は、判定した歩数に関わらず、連続歩数WC及び累積歩数WSの値を1歩増加させると共に歩行情報Fを生成して出力し、次のステップSP47へ移る。
【0132】
ステップSP47において制御部2は、着地半波間隔T1及び判定した歩数を基に直前の歩行テンポTWを算出して次のステップSP48へ移る。
【0133】
一方、ステップSP41において否定結果が得られると、このことはこの処理サイクル(図15における1回のループ)では着地半波HWを検出していないため1歩目のカウントに関する処理を行う必要が無いことを表しており、このとき制御部2は次のステップSP48へ移る。
【0134】
ステップSP48において制御部2は、最後に検出した着地半波HWについて2歩に相当すると判定したか否かを判定する。ここで肯定結果が得られると、このことは最後に検出した着地半波HWに応じてもう1歩分をカウントする必要があることを表しており、このとき制御部2は次のステップSP49へ移る。
【0135】
ステップSP49において制御部2は、最後に検出した着地半波HWの終了時刻TEから平均歩行テンポTWAに相当する時間が経過したか否かを判定する。ここで否定結果が得られると、このことは未だ次の1歩をカウントすべきタイミングではないことを表しており、このとき制御部2は次のステップSP51へ移る。
【0136】
これに対しステップSP49において肯定結果が得られると、制御部2は次のステップSP50へ移り、2歩目のカウント処理として、連続歩数WC及び累積歩数WSの値を1歩増加させると共に歩行情報Fを生成して出力し、次のステップSP51へ移る。
【0137】
一方、ステップSP48において否定結果が得られると、このことは最後に検出した着地半波HWについて2歩目をカウントする必要が無いことを表しており、このとき制御部2は次のステップSP51へ移る。
【0138】
ステップSP51において制御部2は、元の歩行情報生成処理手順RT1(図15)へ戻り、次のステップSP2へ移る。
【0139】
ステップSP2において制御部2は、最後に算出した仮面積値MTを用いて平均面積値MAを更新すると共に、最後に算出した歩行テンポTWを用いて平均歩行テンポTWAを更新して、再度鉛直成分推定ルーチンRT2へ戻る。
【0140】
このように制御部2は、加速度センサ21(図3)による加速度値A1が生成される周期(すなわち25[Hz])で歩行情報生成処理手順RT1を繰り返すことにより、使用者が歩行し始めたときに直ちにその1歩を検出して歩行情報Fを生成するようになされている。
【0141】
[1−4.動作及び効果]
以上の構成において、スマートフォン1の制御部2は、加速度値A1からその鉛直方向成分である鉛直加速度値A3を生成し、当該鉛直加速度値A3の波形を基に着地半波HWを検出する。
【0142】
続いて制御部2は、当該着地半波HWを検出したタイミングで、着地半波間隔T1及び着地半波長T2を算出した上で、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出し、これを比閾値THと比較する。
【0143】
ここで制御部2は、着地半波比率Rが比閾値TH未満であれば、スマートフォン1の携帯箇所が使用者の上半身であり着地半波HWが1歩に相当するものと判定する。一方制御部2は、着地半波比率Rが比閾値TH以上であれば、スマートフォン1の携帯箇所が使用者の下半身であり、検出した着地半波HWが2歩に相当するものと判定する。
【0144】
そして制御部2は、直ちに連続歩数WC及び累積歩数WS等の値を更新すると共に歩行情報Fを生成して他のプログラム等へ引き渡す。
【0145】
従って制御部2は、鉛直加速度値A3を基に、スマートフォン1を携帯している使用者が歩行したことを、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、その1歩目から検出することができる。
【0146】
このとき制御部2は、着地半波比率Rの度数分布の傾向が上半身と下半身とで大きく異なることを利用し(図13)、適切に定めた比閾値TH(すなわち3.5)と当該着地半波比率Rとの大小関係から、着地半波HWが使用者の1歩又は2歩のいずれに相当するかを精度良く判定することができる。
【0147】
また制御部2は、鉛直加速度値A3に含まれる負の半波のうち、「初期状態S1、下降状態S2、上昇状態S3、初期状態S1」といった一連の状態遷移(図9)を経て、且つその面積がある程度大きい場合(図10)のみ着地半波HWとして検出する。
【0148】
ここで、携帯箇所が下半身である場合には(図12(B)等)、携帯箇所と反対側の足が着地したときの半波が極めて小さく、外力等の他の要因による半波と類似しているため、使用者の歩行に起因したものであることを正しく判定することは極めて難しい。
【0149】
この点において制御部2は、着地半波検出ルーチンRT3(図17)により、スマートフォン1の携帯箇所が上半身であるときの両足の着地による半波、及び下半身であるときの携帯箇所側の足の着地による半波のみを着地半波HWとして検出する。
【0150】
このため制御部2は、他の要因による半波や、携帯箇所と反対側の足が着地したときの半波(すなわち他の要因による半波と区別が難しい半波)については除外することができ、足の着地によるものである確実性が高い半波のみを着地半波HWとすることができる。この場合、携帯箇所と反対側の足が着地したときの半波を除外することについては、着地半波比率Rを基に着地半波HWを2歩相当と判定することにより、歩数のカウントを適切に補うことができる。
【0151】
さらに制御部2は、着地半波HWの判定において用いる仮面積値MTについて、鉛直加速度値A3を加算するだけでこれに相当する値を算出することができるため、複雑な演算が必要な共相関を用いる場合等と比較して、その演算負荷を大幅に削減することができ、リアルタイム性を高めることができる。
【0152】
以上の構成によれば、スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
【0153】
<2.他の実施の形態>
なお上述した実施の形態においては、上半身及び下半身それぞれの着地半波比率Rの度数分布特性(図13)を基に、比閾値THの値を3.5とするようにした場合について述べた。
【0154】
本発明はこれに限らず、例えば両分布における最頻値同士の中間値や、近似曲線を描いたときの交点となる値とする等、上半身及び下半身それぞれの着地半波比率Rについての種々の性質や特性等を基に比閾値THの値を定めるようにしても良い。この場合、要はスマートフォン1の携帯箇所を判定すると共に1個の着地半波HWに相当する歩数を判定するのに適した値であれば良い。
【0155】
また上述した実施の形態においては、着地半波比率Rが比閾値TH以上であり1個の着地半波HWを2歩に相当すると判定した場合に、まず1歩をカウントした後、歩行テンポTWの経過後に次の1歩をカウントするようにした場合について述べた。
【0156】
本発明はこれに限らず、例えばナビゲーション画面において1歩ごとの表示の更新まではしないような場合に、着地半波HWの検出時又は歩行テンポTWの経過後に、2歩まとめてカウントするようにしても良い。
【0157】
さらに上述した実施の形態においては、「初期状態S1、下降状態S2、上昇状態S3、初期状態S1」といった一連の状態遷移(図9)を経て、且つその面積がある程度大きい場合(図10)のみ着地半波HWとして検出するようにした場合について述べた。
【0158】
本発明はこれに限らず、例えば特許文献1に開示されているように共相関を用いるようにし、或いは極値VPが所定の閾値を越えることや極値時刻TP同士の間隔が一定の範囲であることを要件とし、さらにはこれらを組み合わせる等、種々の要件により着地半波HWを検出するようにしても良い。またこの場合、各閾値を固定値とするのみでなく、過去の極値VPや平均歩行テンポTWA等を基に随時更新するようにしても良い。
【0159】
この場合、要は、スマートフォン1の携帯箇所が上半身であるときの両足の着地による半波、及び下半身であるときの携帯箇所側の足の着地による半波のみを着地半波HWとして検出できれば良い。
【0160】
さらに上述した実施の形態においては、着地半波HWの極値時刻TPと直前の着地半波HW0の極値時刻TP0との間隔を着地半波間隔T1とするようにした場合について述べた。
【0161】
本発明はこれに限らず、例えば着地半波HW及び直前の着地半波HW0それぞれの開始時刻TS同士の間隔や終了時刻TE同士の間隔等、両半波において対比の対象となり得るような特徴点同士の時間間隔を着地半波間隔T1とするようにしても良い。
【0162】
さらに上述した実施の形態においては、3次元の加速度値A1を基に鉛直単位ベクトルUVを生成し、これと加速度値A1との内積を1次元の鉛直加速度値A2とし、さらにその低域成分を鉛直加速度値A3とするようにした場合について述べた。
【0163】
本発明はこれに限らず、加速度値A1を基に種々の演算を行うことにより鉛直加速度値A3を生成するようにし、或いは鉛直方向の加速度を検出し得る鉛直加速度センサから直接的に鉛直加速度値A2を取得し、その低域成分を鉛直加速度値A3とする等、種々の手法により鉛直加速度値A3を取得するようにしても良い。
【0164】
さらに上述した実施の形態においては、鉛直成分推定ルーチンRT2(図16)において、1秒平均値A1Aを3秒分蓄積してから鉛直加速度値A2を算出するようにした場合について述べた。
【0165】
本発明はこれに限らず、1秒平均値A1Aを1.5秒分、5秒分や10秒分など、他の任意の秒数分だけ蓄積してから鉛直加速度値A2を算出するようにしても良い。また1秒平均値A1Aに代えて、例えば0.5秒分の平均値である0.5秒平均値のような任意の期間の平均値を用いるようにしても良い。
【0166】
さらに上述した実施の形態においては、地図データをデータベース8に記憶させておき、当該データベース8から地図データを読み出してナビゲーション画面の表示処理等を行う場合について述べた。
【0167】
本発明はこれに限らず、例えばインターネット等のネットワーク上に地図データを記憶する地図サーバを設けておき、通信処理部16からアンテナ16Aを介して基地局と通信接続することにより当該地図サーバにアクセスし、地図データを取得してナビゲーション画面の表示処理等を行うようにしても良い。またこの場合、経路探索処理や画面生成処理等の演算処理についても、地図サーバや他のサーバ等において実行するようにしても良い。
【0168】
さらに上述した実施の形態においては、制御部2が不揮発性メモリ6から歩行情報生成プログラムを読み出して実行することにより、図5に示した各種機能をソフトウェアにより実現するようにした場合について述べた。
【0169】
本発明はこれに限らず、図5に示した各種機能をハードウェアにより実現しても良く、さらには機能ごとにソフトウェア及びハードウェアを混在させるようにしても良い。
【0170】
さらに上述した実施の形態においては、情報処理装置としてのスマートフォン1において、制御部2が、不揮発性メモリ6に予め格納されている歩行情報生成プログラムを読み出して実行するようにした場合について述べた。
【0171】
本発明はこれに限らず、例えば制御部2が通信処理部16や外部インタフェース17等を介して外部から取得した歩行情報生成プログラムを不揮発性メモリ6等にインストールして実行するようにしても良い。
【0172】
さらに上述した実施の形態においては、本発明をスマートフォン1に適用するようにした場合について述べた。しかしながら本発明はこれに限らず、例えば携帯型ナビゲーション装置や、携帯型音楽再生装置、ディジタルカメラ、或いは携帯型ゲーム機等のように、使用者に携帯されその歩行状況を検出してナビゲーション機能や歩数計機能等に利用する種々の携帯型電子機器に適用するようにしても良い。
【0173】
例えば携帯型音楽再生装置の場合、アームバンドやリストバンド等により使用者の腕や手首を携帯箇所P8及びP9(図11)とし、或いはヘッドフォン一体型の場合に頭部を携帯箇所P10とすることも考えられるが、この場合も携帯箇所P3〜P7と同様に上半身として扱えば良い。
【0174】
さらに上述した実施の形態においては、取得部としての加速度センサ21、鉛直方向推定部31及び鉛直成分抽出部32と、着地半波検出部及び間隔検出部としての着地半波検出部34と、歩数判定部及び出力部としての歩数判定部35とによって歩行状況検出装置としてのスマートフォン1を構成する場合について述べた。
【0175】
本発明はこれに限らず、その他種々の構成でなる取得部と、着地半波検出部と、間隔検出部と、歩数判定部と、出力部とによって歩行状況検出装置を構成するようにしても良い。
【産業上の利用可能性】
【0176】
本発明は、使用者に携帯される種々の携帯型電子機器でも利用できる。
【符号の説明】
【0177】
1……スマートフォン、2……制御部、6……不揮発性メモリ、21……加速度センサ、31……鉛直方向推定部、32……鉛直成分抽出部、34……着地半波検出部、35……歩数判定部、A1……加速度値、A3……鉛直加速度値、HW……着地半波、VP……極値、TS……開始時刻、TP……極値時刻、TE……終了時刻、T1……着地半波間隔、T2……着地半波長、R……着地半波比率、TH……比閾値、F……歩行情報。
【特許請求の範囲】
【請求項1】
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得部と、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出部と、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出部と、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定部と、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力部と
を有する歩行状況検出装置。
【請求項2】
過去の上記着地半波間隔を基に、上記使用者の平均的な歩行のテンポである平均歩行テンポを算出する平均歩行間隔算出部
をさらに有し、
上記出力部は、
上記着地半波を2歩分と判定した場合、上記着地半波に対応付けて1歩分の歩行情報を出力し、上記平均歩行テンポの経過後に残りの1歩分の歩行情報を出力する
請求項1に記載の歩行状況検出装置。
【請求項3】
上記比閾値は、
上記歩行検出装置が上記使用者の上半身に身に付けられたときに得られた上記着地半波比率の度数分布である上半身度数分布と、上記歩行検出装置が上記使用者の下半身に身に付けられたときに得られた上記着地半波比率の度数分布である下半身度数分布とを基に定められた
請求項1に記載の歩行状況検出装置。
【請求項4】
上記比閾値は、
上記上半身度数分布の中心値と上記下半身度数分布の中心値との中間値よりも当該下半身度数分布の中心値に近い値に定められた
請求項3に記載の歩行状況検出装置。
【請求項5】
上記着地半波検出部は、
上記所定周期ごとに得られる上記鉛直加速度値の値について、下向きの加速度を表し且つ直前の値よりも減少する下降状態となり、続けて下向きの加速度を表し且つ直前の値よりも増加する上昇状態となった後、上向きの加速度になったときに、上記鉛直加速度値のうち当該下向きの加速度であった範囲を上記着地半波として検出する
請求項1に記載の歩行状況検出装置。
【請求項6】
過去に検出した上記着地半波の面積を表す半波面積の平均値を算出する平均半波面積算出部
をさらに有し、
上記着地半波検出部は、
上記加速度値における下向き加速度を表す半波のうち、その面積が上記平均半波面積の所定倍よりも大きいものを上記着地半波として検出する
請求項1に記載の歩行状況検出装置。
【請求項7】
上記間隔検出部は、
上記着地半波の極と、直前に検出された上記着地半波の極との時間間隔を上記着地半波間隔として検出する
請求項1に記載の歩行状況検出装置。
【請求項8】
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得ステップと、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出ステップと、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出ステップと、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定ステップと、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力ステップと
を有する歩行状況検出方法。
【請求項9】
情報処理装置に対し、
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得ステップと、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出ステップと、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出ステップと、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定ステップと、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力ステップと
を実行させる歩行状況検出プログラム。
【請求項1】
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得部と、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出部と、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出部と、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定部と、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力部と
を有する歩行状況検出装置。
【請求項2】
過去の上記着地半波間隔を基に、上記使用者の平均的な歩行のテンポである平均歩行テンポを算出する平均歩行間隔算出部
をさらに有し、
上記出力部は、
上記着地半波を2歩分と判定した場合、上記着地半波に対応付けて1歩分の歩行情報を出力し、上記平均歩行テンポの経過後に残りの1歩分の歩行情報を出力する
請求項1に記載の歩行状況検出装置。
【請求項3】
上記比閾値は、
上記歩行検出装置が上記使用者の上半身に身に付けられたときに得られた上記着地半波比率の度数分布である上半身度数分布と、上記歩行検出装置が上記使用者の下半身に身に付けられたときに得られた上記着地半波比率の度数分布である下半身度数分布とを基に定められた
請求項1に記載の歩行状況検出装置。
【請求項4】
上記比閾値は、
上記上半身度数分布の中心値と上記下半身度数分布の中心値との中間値よりも当該下半身度数分布の中心値に近い値に定められた
請求項3に記載の歩行状況検出装置。
【請求項5】
上記着地半波検出部は、
上記所定周期ごとに得られる上記鉛直加速度値の値について、下向きの加速度を表し且つ直前の値よりも減少する下降状態となり、続けて下向きの加速度を表し且つ直前の値よりも増加する上昇状態となった後、上向きの加速度になったときに、上記鉛直加速度値のうち当該下向きの加速度であった範囲を上記着地半波として検出する
請求項1に記載の歩行状況検出装置。
【請求項6】
過去に検出した上記着地半波の面積を表す半波面積の平均値を算出する平均半波面積算出部
をさらに有し、
上記着地半波検出部は、
上記加速度値における下向き加速度を表す半波のうち、その面積が上記平均半波面積の所定倍よりも大きいものを上記着地半波として検出する
請求項1に記載の歩行状況検出装置。
【請求項7】
上記間隔検出部は、
上記着地半波の極と、直前に検出された上記着地半波の極との時間間隔を上記着地半波間隔として検出する
請求項1に記載の歩行状況検出装置。
【請求項8】
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得ステップと、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出ステップと、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出ステップと、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定ステップと、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力ステップと
を有する歩行状況検出方法。
【請求項9】
情報処理装置に対し、
使用者の行動に応じた鉛直方向の加速度成分を表す鉛直加速度値を所定周期で取得する取得ステップと、
上記鉛直加速度値における下向き加速度を表す半波のうち上記使用者が着地したことを表す着地半波を検出する着地半波検出ステップと、
上記着地半波と直前に検出された上記着地半波との対応する特徴点同士の時間間隔でなる着地半波間隔と、上記着地半波における開始点及び終了点の時間間隔でなる着地半波長とを検出する間隔検出ステップと、
上記着地半波長に対する上記着地半波間隔の比率を表す着地半波比率が所定の比閾値を越える場合には上記着地半波を2歩分と判定し、それ以外の場合には上記着地半波を1歩分と判定する歩数判定ステップと、
上記歩数判定部による判定結果に基づき、上記使用者の歩行状況を表す歩行情報を上記着地半波に対応させて出力する出力ステップと
を実行させる歩行状況検出プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−107992(P2012−107992A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−257179(P2010−257179)
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]