
歩行者検出装置、歩行者検出方法およびプログラム
【課題】歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部12と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部22と、受信部12により受信された反射電波の特性を、記憶部22に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が歩行者であるか否かの判定を行う情報処理部21と、が設けられている。受信部12により受信された反射電波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定を行うことで、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【解決手段】車両の前方に向かって電波を送信する送信部11と、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部12と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部22と、受信部12により受信された反射電波の特性を、記憶部22に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が歩行者であるか否かの判定を行う情報処理部21と、が設けられている。受信部12により受信された反射電波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定を行うことで、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に用いられて好適な歩行者検出装置、歩行者検出方法およびプログラムに関する。
【背景技術】
【0002】
近年、車両を運転する際の運転者の負担を軽減する様々な運転支援技術や、車両の衝突が不可避な場合やそれに近い場合における衝突被害の軽減を図る技術が提案されている。例えば、76GHz帯の電波(以下、「ミリ波」と表記する。)を用いて車両前方に存在する物標を検出するレーダのような物標検出装置を利用した衝突回避システムや、衝突の被害を軽減するシステムも提案されている(例えば、特許文献1参照。)。
【0003】
上述の衝突回避システムや被害軽減システムの場合、システムを有効に機能させるには、車両前方に存在する物標の種類が判別されることが望ましい。つまり、レーダ等によって車両前方の物標の種類、例えば、車両なのか、人である歩行者なのか等の種類が判別できることが望ましい。
【0004】
具体的には、歩行者は車両前方を横切る可能性があるため、車両前方の物標が歩行者であると判別ができた場合には、車両が歩行者に近づく前に運転者に対して、前方の歩行者に注意を払うように警告を発する制御を行ことが望ましい。このような制御を行うことで、歩行者の安全を確保することができる。
【0005】
特許文献1に記載された障害物検出装置(レーダ)では、原則として、車両の走行路に対して横方向(横切る方向)へ移動する物標は歩行者であるとみなして判別を行っている。さらに特許文献1には、上述のように判別する際に発生する誤判別、つまり歩行者でない物を歩行者として判別することを回避する技術が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−249754号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載された障害物検出装置では、車両の走行路に対して横方向へ移動するか否かにより物標の種類(歩行者か否か)を判別するため、歩行者でない物を歩行者と判別する誤判別を行ってしてしまう可能性が高いという問題があった。言い換えると、走行路に沿って歩行する歩行者や、立ち止まっている歩行者を確実に検出することが難しいという問題があった。
【0008】
本発明は、上記の課題を解決するためになされたものであって、歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、以下の手段を提供する。
本発明の歩行者検出装置は、車両の前方に向かって電波を送信する送信部と、送信部から送信された電波のうち、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部と、受信部により受信された反射電波の特性を、記憶部に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が前記歩行者であるか否かの判定を行う情報処理部と、が設けられていることと特徴とする。
【0010】
本発明の歩行者検出装置によれば、受信部により受信された反射電波の特性と、記憶部に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【0011】
上述の反射電波の特性は、反射電波の強度や、強度の変化などを例示することができる。この特性は、電波を反射する物標における材料や形状、物標自身の形状変化の有無など種々の要因に基づき変化する。つまり、物標が車両である場合の反射電波の特性と、歩行者である場合の反射電波の特性とは異なる。歩行者は、車両や電柱などの構造物と比較して、形状が複雑であるとともに、その形状が時間の経過とともに大きく変化し、さらに電波の反射率が大きく異なる様々な物品を身につけている。そのため、歩行者における反射電波の特性は、車両等における反射電波の特性と比較して、反射電波の変動が激しいという特徴を有する。この点に着目することで、物標が歩行者か否かの判定をより確実に行うことができる。
【0012】
上記発明において反射電波の特性は、物標により反射された反射電波の強度であり、記憶部には、歩行者反射電波特性に係る反射電波の強度の値である所定の強度閾値が記憶されていることが望ましい。
【0013】
このように反射電波の強度に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定をより確実に行うことができる。つまり、歩行者と車両や電柱などの構造物とを比較すると、同じ強度の電波を照射した際における歩行者の反射電波の強度は、構造物の反射電波の強度よりも弱くなる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0014】
上記発明において情報処理部は、受信部によって受信された反射電波の強度の値が、記憶部に記憶された所定の強度閾値以下であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0015】
このように歩行者からの反射電波の強度と、歩行者ではない車両などからの反射電波の強度との境界として所定の強度閾値が設定され、物標により反射された反射電波の強度の値が所定の強度閾値以下であれば物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0016】
上記発明において記憶部には、少なくとも車両から物標までの距離に関連した複数の所定の強度閾値が予め記憶され、情報処理部は、車両から物標までの距離の情報を取得し、受信部によって受信された反射電波の強度の値が、車両から物標までの距離に対応する所定の強度閾値以上であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0017】
このように、少なくとも車両から物標までの距離に応じて異なる複数の所定の強度閾値を予め準備し、情報処理部が取得した車両から物標までの距離に対応する所定の強度閾値が複数の所定の強度閾値の中から選択され、物標により反射された反射電波の強度の値が、選択された所定の強度閾値以下であれば物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。より具体的には、物標からの反射電波の強度は、車両から物標までの距離に依存して大きく変化するため、車両から物標までの距離に対応する所定の強度閾値を用いることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0018】
上記発明において反射電波の特性は、物標により反射された反射電波における強度の変動幅の値であり、記憶部には、歩行者反射電波特性に係る反射電波における強度の変動幅の値である所定の変動閾値が記憶され、情報処理部は、受信部によって受信された反射電波の強度の変動幅の値が、記憶部に記憶された所定の変動閾値以上であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0019】
このように反射電波における強度の変動幅に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。つまり、歩行者と車両等の構造物とを比較すると、反射電波における強度が時間の経過に伴い大きく変動する。これは、歩行者が車両等の構造物と比較して、複雑な形状であるとともに、形状が時間の経過とともに大きく変化するためと考えられる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0020】
さらに、歩行者からの反射電波の強度の変動幅と、歩行者ではない車両などからの反射電波の強度の変動幅との境界として所定の変動閾値が設定され、物標により反射された反射電波の強度の変動幅の値が所定の変動閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0021】
ここで、反射電波における強度の変動幅は、一定の時間間隔における反射電波における強度の値の差である差分値や、変動する反射電波における強度の振幅値など、変動幅を求める公知の方法で求めた値を用いることができる。
【0022】
上記発明において前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の偏差を合計した値であり、前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の偏差を合計した値である所定の偏差閾値が記憶され、前記情報処理部は、前記受信部によって受信された前記反射電波における強度の偏差を合計した値が、前記記憶部に記憶された前記所定の偏差閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことが望ましい。
【0023】
このように反射電波における強度の偏差の合計値に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。さらに、歩行者からの反射電波の強度の偏差の合計値と、歩行者ではない車両などからの反射電波の強度の偏差の合計値との境界として所定の偏差閾値が設定され、物標により反射された反射電波の強度の偏差の合計値が所定の偏差閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0024】
上記発明において情報処理部は、所定の周期で電波を反射した物標が歩行者であるか否かの判定を繰り返し行い、物標が歩行者であると判定されると、所定の期間は、その後判定の結果に関わらず、物標が歩行者であるとの判定結果を保持することが望ましい。
【0025】
このように物標が歩行者であると一度判定された場合、所定の期間は、例え物標が歩行者ではないと判定されたとしても、物標が歩行者であるとの判断結果を外部に出力しつづけることで、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0026】
一般に、歩行者からの反射電波の強度は変動が激しく、かつ、変動の態様が一定でない。そのため、物標が歩行者であっても、情報処理部における判定のタイミングによって、物標が歩行者であると判定されたり、歩行者ではないと判定されたりする場合がある。この場合であっても、一度、物標を歩行者であると判定した後の一定の期間は、判定の結果に関わらず、物標を歩行者であると判定し続けることにより、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0027】
上記発明において前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の分散の値であり、前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の分散の値である所定の分散閾値が記憶され、前記情報処理部は、前記受信部によって受信された前記反射電波における強度の分散の値が、前記記憶部に記憶された前記所定の分散閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことが望ましい。
【0028】
このように反射電波における強度の分散の値に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。さらに、歩行者からの反射電波の強度の分散の値と、歩行者ではない車両などからの反射電波の強度の分散の値との境界として所定の分散閾値が設定され、物標により反射された反射電波の強度の分散の値が所定の分散閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0029】
上記発明において情報処理部は、送信部から送信された電波および受信部に受信された反射電波に基づいて、物標の移動速度を算出し、さらに、算出された物標の移動速度が、予め定められた所定の移動速度以上の場合には、物標が前記歩行者でないと判定することが望ましい。
【0030】
このように物標の移動速度が所定の移動速度以上である場合には、物標が歩行者でないと判定することで、反射電波の特性のみに基づいて判定する場合と比較して、歩行者でない物標を歩行者であると誤判断する確率を低減することができる。ここで、所定の移動速度としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0031】
上記発明において受信部は、さらに、反射電波が入射する方向を検知するものであり、情報処理部は、反射電波が受信部に入射する方向に基づいて物標が存在する方向を算出し、送信部から送信された電波および受信部に受信された反射電波に基づいて送信部および受信部から物標までの距離を算出し、算出された物標までの距離、および、物標が存在する方向の時間変化に基づいて、物標の移動方向を算出し、算出された物標の移動方向が車両の進行方向と交差する場合には、電波を反射した物標が歩行者であるか否かを判定する際に用いられる基準を変更して、電波を反射した物標を歩行者であると判定する確率を高めることが望ましい。
【0032】
このように演算により求められた物標の移動方向が車両の進行方向と交差する場合、言い換えると物標が車両の進行方向を横切る場合には、情報処理部における物標が歩行者であるか否かの判定する基準を変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0033】
例えば、電波を反射する物標が移動するものである場合には、その物標は電柱などの固定された構造物である可能性が低い。さらに、移動する物標の移動方向が車両の進行方向を横切る方向である場合には、その物標は同じ車道を走行する先行車である可能性が低い。つまり、物標の移動方向が車両の進行方向と交差する場合には、他の場合と比較して、その物標が歩行者である可能性が高くなる。この場合、基準値を変更して物標が歩行者であると判定する確率を高めることにより、歩行者である物標を歩行者ではないと誤判断する確率を低下させることができる。その一方で、歩行者ではない物標を歩行者であると誤判断する確率は高くなりにくい。
【0034】
ここで、物標が歩行者であるか否かの判定する基準としては、反射電波の強度の値や、反射電波の強度の変動幅や、反射電波の強度の偏差合計の値や、反射電波の強度の分散の値などを例示することができる。
【0035】
上記発明において情報処理部は、算出された物標の移動方向が車両の進行方向と交差する場合には、送信部から送信された電波および受信部に受信された反射電波に基づいて、物標の移動速度を算出し、さらに、算出された物標の移動速度が、予め定められた所定の交差速度範囲内の場合には、電波を反射した物標が歩行者であるか否かを判定する際に用いられる基準を変更して、電波を反射した物標を歩行者であると判定する確率を高めることが望ましい。
【0036】
このように物標の移動方向が車両の進行方向と交差するとともに、物標の移動速度が所定の交差速度範囲内である場合には、情報処理部における物標が歩行者であるか否かの判定する基準を変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0037】
ここで、所定の交差速度範囲としては、歩行者の歩行速度範囲を例示することができ、下限としては高齢者の歩行速度である4km/h程度を挙げることができ、上限としては歩行者が全力で走った際の速度である12km/hから18km/h程度を挙げることができる。
【0038】
本発明の歩行者検出方法は、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、受信された反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比ステップと、対比した結果に基づいて物標が歩行者であるか否かを判定する判定ステップと、を有することを特徴とする。
【0039】
本発明のプログラムは、コンピュータに、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出機能と、受信された反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比機能と、対比した結果に基づいて物標が前記歩行者であるか否かを判定する判定機能と、を実現させることを特徴とする。
【0040】
本発明の歩行者検出方法またはプログラムによれば、受信部により受信された反射電波の特性と、予め記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【発明の効果】
【0041】
本発明の歩行者検出装置、歩行者検出方法およびプログラムによれば、受信部により受信された反射電波の特性と、予め記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができ、歩行者をより確実に検出することができるという効果を奏する。
【図面の簡単な説明】
【0042】
【図1】本発明の第1の実施形態に係る歩行者検出装置の構成を説明するブロック図である。
【図2】図1の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図3】強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
【図4】本発明の第1の実施形態の第1変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図5】本発明の第1の実施形態の第2変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図6】本発明の第1の実施形態の第3変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【発明を実施するための形態】
【0043】
〔第1の実施形態〕
以下、本発明の第1の実施形態に係る歩行者検出装置1ついて図1から図6を参照して説明する。図1は、本実施形態に係る歩行者検出装置1の構成を説明するブロック図である。
【0044】
本発明に係る歩行者検出装置1は、車両の前方に存在する物標を検出する物標検出装置であり、かつ、検出した物標が歩行者か否かの判定も併せて行うものである。歩行者検出装置1によって検出された物標が歩行者であると判定された場合には、歩行者検出装置1から、車両の前方に歩行者が検出されたことを示す歩行者検出信号が出力される。
【0045】
歩行者検出装置1から出力された歩行者検出信号は、車両の運転者に歩行者の存在を知らせる警報部や、歩行者との距離に応じて車両の走行速度を制御または車両を停止させる自動走行制御部などに入力されるものである。
【0046】
歩行者検出装置1は、いわゆるミリ波を用いて車両の前方に存在する物標を検出するレーダを用いたミリ波センサである。本実施形態では、歩行者検出装置1が設けられた車両と物標との間の距離および相対速度をFM−CW(Frequency Modulation−Continuous Wave)方式で検出し、車両に対する物標が存在する方向(方位)をDBF(Digital Beam Forming)方式で検出する場合に適用して説明する。なお、車両と物標との間の距離および相対速度を検出する方式や、車両に対する物標が存在する方向を検出する方式は、上述の方式とは異なる他の方式であってもよく、特に限定するものではない。
【0047】
また、歩行者検出装置1は、上述のようにミリ波センサのみを用いて物標を検出し、物標が歩行者であるか否かを判定するものであってもよいし、ミリ波センサの他にカメラなどの映像取得部および取得した映像を処理する映像処理部を備えて、これらを併用して物標の検出および物標が歩行者であるか否かの判定を行ってもよく、特に限定するものではない。
【0048】
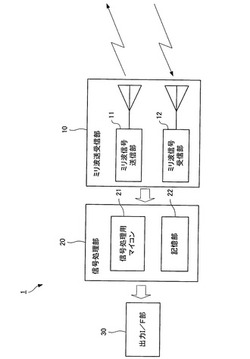
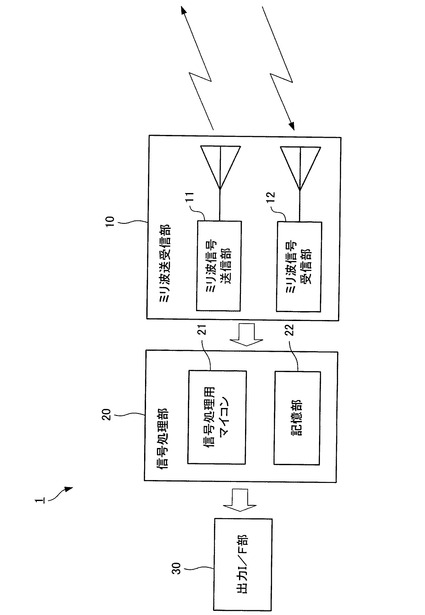
歩行者検出装置1には、図1に示すように、ミリ波送受信部10と、信号処理部20と、出力I/F部30と、が主に設けられている。
ミリ波送受信部10は、車両の前方にむけてミリ波(電波)を送信するとともに、前方に存在する物標に反射された反射ミリ波(反射電波)を受信するものである。ミリ波送受信部10には、ミリ波信号送信部(送信部)11と、ミリ波信号受信部(受信部)12とが主に設けられている。
【0049】
ミリ波信号送信部11はミリ波を送信するものであり、具体的には、周波数を時間の経過とともに変動(変調)させたミリ波を送信するものである。ミリ波信号送信部11の構成としては、公知の構成を用いることができ、特に限定するものではない。ミリ波の周波数は、縦軸を周波数、横軸を時間としたグラフで表した場合、右上がりの斜辺と右下がりの斜辺とが連続する形状を描くように変調される。
【0050】
ミリ波信号受信部12は物標により反射された反射ミリ波を受信して受信信号を出力するものであり、反射ミリ波の入射方向を検出するものである。本実施形態では、複数、例えば5つの並んだアンテナを備えたミリ波信号受信部12である例に適用して説明する。この場合、反射ミリ波がミリ波信号受信部12に入射する方位によって、5つのアンテナのそれぞれに到達する反射ミリ波の行路の長さが変わる。そのために発生した、それぞれのアンテナで検出された反射ミリ波の間の位相を検出することにより、反射ミリ波の入射方向を検出することができる。
【0051】
信号処理部20は、ミリ波信号受信部12からのミリ波の送信を制御するとともに、反射ミリ波を受信したミリ波信号受信部12から出力される受信信号を処理するものである。信号処理部20には、信号処理用マイコン(情報処理部、コンピュータ)21と、記憶部22と、が主に設けられている。
【0052】
信号処理用マイコン21は、信号の演算処理を行う電子回路であり、信号処理部20における各種制御に係る演算や、入力された受信信号の演算処理などを行うものである。
記憶部22は、RAM(Random Access Memory)やROM(Read Only Memory)などの半導体記憶装置であって、信号処理用マイコン21における演算処理に用いられるプログラムが記憶されるものである。更に記憶部22は、後述するように、物標が歩行者であるか否かの判定に用いられる各種の閾値が予め記憶されているものである。
【0053】
出力I/F部30は、信号処理部20において車両の前方に歩行者が検出された際、言い換えると、物標が歩行者であると判定された際に、信号処理部20から出力される歩行者検出信号を、歩行者検出装置1の外部に出力するインターフェースである。
【0054】
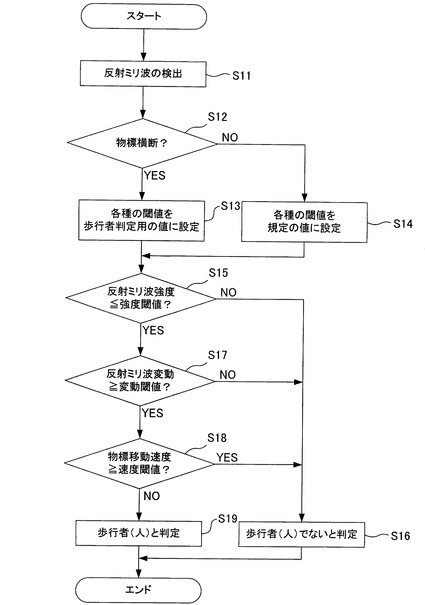
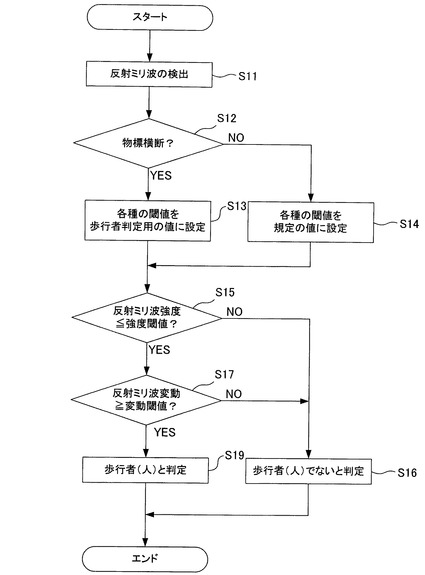
次に、上記の構成からなる歩行者検出装置1における歩行者の検出方法について説明する。図2は、図1の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0055】
まず、車両の電源状態がACC(アクセサリ)オンの状態になると、言い換えると、歩行者検出装置1に電力が供給されると、信号処理部20からミリ波信号送信部11に向けて、ミリ波を送信させる制御信号が出力される。制御信号が入力されたミリ波信号送信部11からは、車両の前方に向けてミリ波が送信される。ミリ波は連続して送信されてもよいし、一定の間隔を空けて離散的に送信されてもよく、特に限定するものではない。
【0056】
車両の前方に物標が存在する場合、ミリ波信号送信部11から送信されたミリ波は物標において反射されて反射ミリ波となる。反射ミリ波は、物標から車両に向かって反射し、その一部がミリ波信号受信部12に受信される。言い換えると反射ミリ波がミリ波信号受信部12に検出される(S11:検出ステップ)。ミリ波信号受信部12は、5つのアンテナのそれぞれから受信した反射ミリ波の受信信号を出力する。
【0057】
ミリ波信号受信部12から出力された受信信号は、信号処理部20の信号処理用マイコン21に入力される。信号処理用マイコン21は入力された受信信号に基づいて、ミリ波を反射した物標が、車両の進行方向を横断するか否かを判定する(S12)。
【0058】
具体的には、まず信号処理用マイコン21は、ミリ波信号受信部12から入力された5つのアンテナに係る受信信号の間の位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は反射ミリ波の入射方向、言い換えると、車両に対するミリ波を反射した物標の方位を演算により求める。
【0059】
さらに信号処理用マイコン21は、ミリ波信号送信部11から送信されたミリ波と、ミリ波信号受信部12により受信された反射ミリ波との位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は、ミリ波を反射した物標と車両との間の距離を演算により求める。ミリ波と反射ミリ波との位相差に基づいて、物標と車両との間の距離を求める演算方法は、公知の演算方法を用いることができ、特に限定するものではない。
【0060】
信号処理用マイコン21は、一旦、演算により求められた物標の方位および物標までの距離の値を記憶部22に記憶させる。所定の時間間隔をおいて、信号処理用マイコン21は、再び物標の方位および物標までの距離を演算により求める。ここで、信号処理用マイコン21は、記憶部22から以前に記憶させた物標の方位および物標までの距離の値を取得し、取得した値から、今回の演算で求めた物標の方位および物標までの距離の値への変化に基づいて、物標の移動方向および移動速度を演算により求める。
【0061】
演算により物標の移動方向および移動速度が求められると、信号処理用マイコン21は、求められた物標の移動方向が車両の進行方向を横断し、且つ、移動速度が横断閾値(交差速度範囲)の範囲内か、言い換えると、物標の移動方向と車両の進行方向とが交差し、且つ、移動速度が横断閾値の範囲内か否かの判定を行う。物標の移動方向が車両の進行方向と交差し、且つ、移動速度が横断閾値の範囲内の場合(YESの場合)には、以後の処理において用いられる後述する各種の閾値を、物標が歩行者であると判定する確率が高くなる歩行者判定用の閾値とする設定を行う(S13)。その一方で、物標の移動方向が車両の進行方向と交差しない、又は、移動速度が横断閾値の範囲外の場合(NOの場合)には、以後の処理において用いられる各種の閾値を規定の値とする設定を行う(S14)。
【0062】
ここで、横断閾値としては、歩行者の歩行速度範囲を例示することができ、下限としては高齢者の歩行速度である4km/h程度を挙げることができ、上限としては歩行者が全力で走った際の速度である12km/hから18km/h程度を挙げることができる。
【0063】
また、各種の閾値における規定の値とは、例えば歩行者検出装置1が工場から出荷される際に設定される値であり、物標が歩行者であるか否かの予測がない状態において、物標が歩行者か、車両や電柱などの構造物かの判別を行う値のことである。歩行者判定用の閾値とは、物標が歩行者であるとの予測がある(可能性が高い)場合において用いられる値であり、規定の値と比較して、値を低く又は高くして物標を歩行者と判定する確率を高めた値のことである。
【0064】
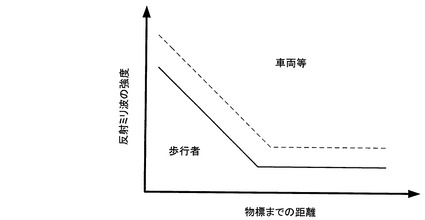
図3は、強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
その一例として、反射ミリ波の強度の値に基づいて物標が歩行者か否かの判定に用いられる強度閾値における、規定の閾値と歩行者判定用の閾値について図3を参照しながら説明する。強度閾値を用いた判定の場合、反射ミリ波の強度の値が、強度閾値以下のであると物標が歩行者であると判定される。そのため、物標を歩行者と判定する確率を高めた歩行者判定用の強度閾値は、規定の強度閾値と比較して、その値が高くなる。図3では、規定の強度閾値を太線のグラフで示し、歩行者判定用の強度閾値を細点線のグラフで示している。
【0065】
上述のように各種の閾値の設定が行われると、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定を行う(S15:対比ステップ)。強度閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における値の大小によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。強度閾値は、図3に示すように、車両と物標との間の距離が離れるに伴い値が減少し、ある距離以上に離れると略一定の値をとるものである。
【0066】
信号処理用マイコン21は、S15の判定を行う際に、直前の演算により求められた物標までの距離に対応したS13において設定された歩行者判定用の強度閾値、または、S14において設定された規定の強度閾値を記憶部22から取得する。強度閾値を取得した信号処理用マイコン21は、取得した強度閾値と、直近に入力された反射ミリ波の強度の値との対比を行う。反射ミリ波の強度が、取得した強度閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16:判定ステップ)。
【0067】
その一方で反射ミリ波の強度が、取得した強度閾値以上の場合(YESの場合)には、信号処理用マイコン21は、反射ミリ波の強度における変動幅、言い換えると差分値が、変動閾値以上であるか否かの判定を行う(S17:対比ステップ)。変動閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における差分値の大小によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。
【0068】
なお、上述のS15においてYESと一度判定されると、YES判定後の一定の期間(所定の期間)は、反射ミリ波の強度が取得した強度閾値未満でありNOと判定される場合であっても、信号処理用マイコン21はYES判定を維持する。
【0069】
このようにすることで、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
つまり、歩行者からの反射電波の強度は変動が激しく、かつ、変動の態様が一定でない。そのため、物標が歩行者であっても、信号処理用マイコン21における判定のタイミングによって、物標が歩行者であると判定されたり、歩行者ではないと誤って判定されたりする場合がある。この場合であっても、一度、物標を歩行者であると判定した後の一定の期間は、判定の結果に関わらず、物標を歩行者であると判定し続けることにより、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0070】
信号処理用マイコン21は、S17の判定を行う際に、S13において設定された歩行者判定用の変動閾値、または、S14において設定された規定の変動閾値を記憶部22から取得する。変動閾値を取得した信号処理用マイコン21は、直近に入力された反射ミリ波の強度の値と、前回又は所定時間前に入力された反射ミリ波の強度の値との差分値を演算により求める。そして、演算により求められた差分値、言い換えると反射ミリ波変動と、取得した変動閾値との対比を行う。反射ミリ波変動が、取得した変動閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16)。
【0071】
その一方で反射ミリ波変動が、取得した変動閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標の移動速度が、速度閾値以上であるか否かの判定を行う(S18:対比ステップ)。速度閾値は、記憶部22に予め記憶されているものであり、物標の移動速度によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。例えば、速度閾値としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0072】
信号処理用マイコン21は、S18の判定を行う際に、S13において設定された歩行者判定用の速度閾値、または、S14において設定された規定の速度閾値を記憶部22から取得する。速度閾値を取得した信号処理用マイコン21は、直近に送信されたミリ波と受信された反射ミリ波との間の位相差を算出し、算出された位相差に基づいて物標の移動速度を算出する。そして算出により求められた移動速度が、取得した速度閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16)。その一方で、算出により求められた移動速度が、取得した速度閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者であると判定する(S19:判定ステップ)。
【0073】
信号処理用マイコン21において物標が歩行者と判定されると、信号処理用マイコン21から出力I/F部30を介して、歩行者検出装置1の外部に向けて歩行者検出信号が出力される。
【0074】
上記の構成によれば、ミリ波信号受信部12により受信された反射ミリ波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、ミリ波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定をより確実に検出することができる。
【0075】
反射ミリ波の強度に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定をより確実に行うことができる。つまり、歩行者と車両や電柱などの構造物とを比較すると、同じ強度のミリ波を照射した際における歩行者の反射ミリ波の強度は、構造物の反射ミリ波の強度よりも弱くなる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0076】
車両から物標までの距離に応じて異なる複数の強度閾値を予め準備し、信号処理用マイコン21が取得した車両から物標までの距離に対応する強度閾値が複数の強度閾値の中から選択され、物標により反射された反射ミリ波の強度の値が、選択された強度閾値以下であれば物標を歩行者と判断する(S15)ことにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。より具体的には、物標からの反射ミリ波の強度は、車両から物標までの距離に依存して大きく変化するため、車両から物標までの距離に対応する強度閾値を用いることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0077】
反射ミリ波における強度の変動幅に基づいて物標が歩行者か否かの判定を行う(S17)ことにより、物標が歩行者か否かの判定を確実に行うことができる。つまり、歩行者と車両等の構造物とを比較すると、反射ミリ波における強度が時間の経過に伴い大きく変動する。これは、歩行者が車両等の構造物と比較して、複雑な形状であるとともに、形状が時間の経過とともに大きく変化するためと考えられる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0078】
さらに、歩行者からの反射ミリ波の強度の変動幅と、歩行者ではない車両などからの反射ミリ波の強度の変動幅との境界として変動閾値が設定され、物標により反射された反射ミリ波の強度の変動幅の値が変動閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0079】
S18における判定のように物標の移動速度が速度閾値以上である場合には、物標が歩行者でないと判定することで、反射ミリ波の特性のみに基づいて判定する場合と比較して、歩行者でない物標を歩行者であると誤判断する確率を低減することができる。
【0080】
S12からS14に示すように、演算により求められた物標の移動方向が車両の進行方向と交差する場合、言い換えると物標が車両の進行方向を横切る場合には、信号処理用マイコン21における物標が歩行者であるか否かの判定する各種の閾値を歩行者判定用の閾値に変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0081】
例えば、ミリ波を反射する物標が移動するものである場合には、その物標は電柱などの固定された構造物である可能性が低い。さらに、移動する物標の移動方向が車両の進行方向を横切る方向である場合には、その物標は同じ車道を走行する先行車である可能性が低い。つまり、物標の移動方向が車両の進行方向と交差する場合には、他の場合と比較して、その物標が歩行者である可能性が高くなる。この場合、閾値を歩行者判定用の閾値に変更して物標が歩行者であると判定する確率を高めることにより、歩行者である物標を歩行者ではないと誤判断する確率を低下させることができる。その一方で、歩行者ではない物標を歩行者であると誤判断する確率は高くなりにくい。
【0082】
さらに、物標の移動速度が所定の横断閾値の範囲内である場合には、信号処理用マイコン21における物標が歩行者であるか否かの判定する各種の閾値を歩行者横断用の閾値に変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0083】
なお、上述のS15における判定において、車両と物標との間が所定距離のときに受信された反射ミリ波の強度の値と、同じく車両と歩行者との間が所定距離である場合における強度閾値とを対比して判定を行ってもよい。このようにすることで、S15における判定の際の演算処理量が減少し、歩行者と歩行者でないものとの区別を簡易かつ迅速に行うことができる。
【0084】
また、S17における判定において、反射ミリ波における強度の偏差を所定期間にわたって合計した値と、偏差閾値とを対比して判定を行ってもよいし、反射ミリ波における強度の分散の値と、分散閾値とを対比して判定して行ってもよい。このように反射ミリ波における強度の差分値とは異なる手法で変動幅を評価することにより、差分値を利用した判定では、物標が歩行者か否かの判定が困難な場合であっても、安定して判定を行うことができる。
【0085】
ここで、偏差閾値は、記憶部22に予め記憶されているものであり、反射ミリ波における強度の偏差の値の大小によってミリ波を反射した物標が歩行者か、歩行者でないものかに分ける境界を定める値である。分散閾値も同様に、記憶部22に予め記憶されているものであり、反射ミリ波における分散の値の大小によってミリ波を反射した物標が歩行者か、歩行者でないものかに分ける境界を定める値である。
【0086】
〔第1の実施形態の第1変形例〕
次に、本発明の第1の実施形態の第1変形例について図4を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図4を用いて歩行者の検出方法のみを説明する。図4は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0087】
図4に示すように、歩行者検出装置1に対して電力が供給されてから、信号処理用マイコン21が反射ミリ波の強度における変動幅、言い換えると差分値が、変動閾値以上であるか否かの判定を行うまで、言い換えるとS11からS17までは、第1の実施形態における歩行者の検出方法と同様である。S17の判定において、反射ミリ波変動が、取得した変動閾値以上と判定された場合(YESの場合)、信号処理用マイコン21は、物標が歩行者であるとの判定を行う(S19)。言い換えると、信号処理用マイコン21が、物標の移動速度が速度閾値以下であるか否かの判定を行わない点が、第1の実施形態と異なっている。
【0088】
このように反射ミリ波の特性のみに基づいて物標が歩行者であるか否かの判定を行うことで、物標の移動速度に基づく判定も併用する方法と比較して、判定を行う際に必要な演算量を減らすことができる。
【0089】
〔第1の実施形態の第2変形例〕
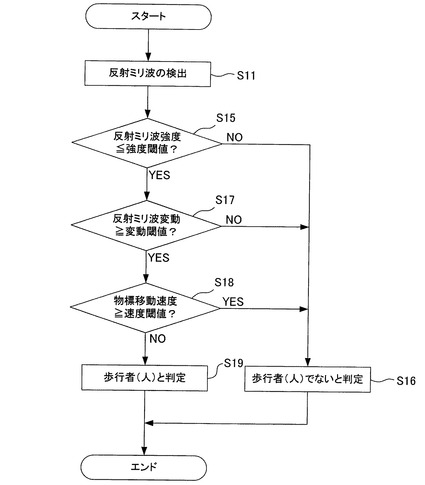
次に、本発明の第1の実施形態の第2変形例について図5を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図5を用いて歩行者の検出方法のみを説明する。図5は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0090】
図5に示すように、歩行者検出装置1に対して電力が供給されてから、反射ミリ波の検出(S11)までは、第1の実施形態と同様である。その後、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定(S15)から、物標の移動速度が速度閾値以上であるか否かの判定(S18)を行う。これらの判定の結果に基づいて、信号処理用マイコン21は、物標が歩行者ではないとの判定(S16)か、物標が歩行者であるとの判定(S19)を行う。
【0091】
上述のS15からS18までの判定では、それぞれ規定の閾値のみが用いられる点が、第1の実施形態と異なる。これにより、記憶部22が記憶する各種の閾値の数が半減するとともに、判定を行う際に必要な演算量を減らすことができる。
【0092】
〔第1の実施形態の第3変形例〕
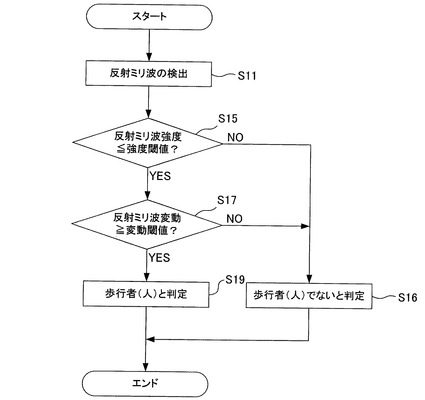
次に、本発明の第1の実施形態の第3変形例について図6を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図6を用いて歩行者の検出方法のみを説明する。図6は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0093】
図6に示すように、歩行者検出装置1に対して電力が供給されてから、反射ミリ波の検出(S11)までは、第1の実施形態と同様である。その後、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定(S15)から、反射ミリ波の強度における変動幅、変動閾値以上であるか否かの判定(S17)を行う。これらの判定の結果に基づいて、信号処理用マイコン21は、物標が歩行者ではないとの判定(S16)か、物標が歩行者であるとの判定(S19)を行う。
【符号の説明】
【0094】
1…歩行者検出装置、11…ミリ波信号送信部(送信部)、12…ミリ波信号受信部(受信部)、21…信号処理用マイコン(情報処理部、コンピュータ)、22…記憶部、S11…検出ステップ、S15…対比ステップ、S16…判定ステップ、S17…対比ステップ
【技術分野】
【0001】
本発明は、車両に用いられて好適な歩行者検出装置、歩行者検出方法およびプログラムに関する。
【背景技術】
【0002】
近年、車両を運転する際の運転者の負担を軽減する様々な運転支援技術や、車両の衝突が不可避な場合やそれに近い場合における衝突被害の軽減を図る技術が提案されている。例えば、76GHz帯の電波(以下、「ミリ波」と表記する。)を用いて車両前方に存在する物標を検出するレーダのような物標検出装置を利用した衝突回避システムや、衝突の被害を軽減するシステムも提案されている(例えば、特許文献1参照。)。
【0003】
上述の衝突回避システムや被害軽減システムの場合、システムを有効に機能させるには、車両前方に存在する物標の種類が判別されることが望ましい。つまり、レーダ等によって車両前方の物標の種類、例えば、車両なのか、人である歩行者なのか等の種類が判別できることが望ましい。
【0004】
具体的には、歩行者は車両前方を横切る可能性があるため、車両前方の物標が歩行者であると判別ができた場合には、車両が歩行者に近づく前に運転者に対して、前方の歩行者に注意を払うように警告を発する制御を行ことが望ましい。このような制御を行うことで、歩行者の安全を確保することができる。
【0005】
特許文献1に記載された障害物検出装置(レーダ)では、原則として、車両の走行路に対して横方向(横切る方向)へ移動する物標は歩行者であるとみなして判別を行っている。さらに特許文献1には、上述のように判別する際に発生する誤判別、つまり歩行者でない物を歩行者として判別することを回避する技術が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−249754号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載された障害物検出装置では、車両の走行路に対して横方向へ移動するか否かにより物標の種類(歩行者か否か)を判別するため、歩行者でない物を歩行者と判別する誤判別を行ってしてしまう可能性が高いという問題があった。言い換えると、走行路に沿って歩行する歩行者や、立ち止まっている歩行者を確実に検出することが難しいという問題があった。
【0008】
本発明は、上記の課題を解決するためになされたものであって、歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、以下の手段を提供する。
本発明の歩行者検出装置は、車両の前方に向かって電波を送信する送信部と、送信部から送信された電波のうち、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部と、受信部により受信された反射電波の特性を、記憶部に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が前記歩行者であるか否かの判定を行う情報処理部と、が設けられていることと特徴とする。
【0010】
本発明の歩行者検出装置によれば、受信部により受信された反射電波の特性と、記憶部に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【0011】
上述の反射電波の特性は、反射電波の強度や、強度の変化などを例示することができる。この特性は、電波を反射する物標における材料や形状、物標自身の形状変化の有無など種々の要因に基づき変化する。つまり、物標が車両である場合の反射電波の特性と、歩行者である場合の反射電波の特性とは異なる。歩行者は、車両や電柱などの構造物と比較して、形状が複雑であるとともに、その形状が時間の経過とともに大きく変化し、さらに電波の反射率が大きく異なる様々な物品を身につけている。そのため、歩行者における反射電波の特性は、車両等における反射電波の特性と比較して、反射電波の変動が激しいという特徴を有する。この点に着目することで、物標が歩行者か否かの判定をより確実に行うことができる。
【0012】
上記発明において反射電波の特性は、物標により反射された反射電波の強度であり、記憶部には、歩行者反射電波特性に係る反射電波の強度の値である所定の強度閾値が記憶されていることが望ましい。
【0013】
このように反射電波の強度に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定をより確実に行うことができる。つまり、歩行者と車両や電柱などの構造物とを比較すると、同じ強度の電波を照射した際における歩行者の反射電波の強度は、構造物の反射電波の強度よりも弱くなる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0014】
上記発明において情報処理部は、受信部によって受信された反射電波の強度の値が、記憶部に記憶された所定の強度閾値以下であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0015】
このように歩行者からの反射電波の強度と、歩行者ではない車両などからの反射電波の強度との境界として所定の強度閾値が設定され、物標により反射された反射電波の強度の値が所定の強度閾値以下であれば物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0016】
上記発明において記憶部には、少なくとも車両から物標までの距離に関連した複数の所定の強度閾値が予め記憶され、情報処理部は、車両から物標までの距離の情報を取得し、受信部によって受信された反射電波の強度の値が、車両から物標までの距離に対応する所定の強度閾値以上であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0017】
このように、少なくとも車両から物標までの距離に応じて異なる複数の所定の強度閾値を予め準備し、情報処理部が取得した車両から物標までの距離に対応する所定の強度閾値が複数の所定の強度閾値の中から選択され、物標により反射された反射電波の強度の値が、選択された所定の強度閾値以下であれば物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。より具体的には、物標からの反射電波の強度は、車両から物標までの距離に依存して大きく変化するため、車両から物標までの距離に対応する所定の強度閾値を用いることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0018】
上記発明において反射電波の特性は、物標により反射された反射電波における強度の変動幅の値であり、記憶部には、歩行者反射電波特性に係る反射電波における強度の変動幅の値である所定の変動閾値が記憶され、情報処理部は、受信部によって受信された反射電波の強度の変動幅の値が、記憶部に記憶された所定の変動閾値以上であるか否かに基づいて、電波を反射した物標が歩行者であるか否かの判定を行うことが望ましい。
【0019】
このように反射電波における強度の変動幅に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。つまり、歩行者と車両等の構造物とを比較すると、反射電波における強度が時間の経過に伴い大きく変動する。これは、歩行者が車両等の構造物と比較して、複雑な形状であるとともに、形状が時間の経過とともに大きく変化するためと考えられる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0020】
さらに、歩行者からの反射電波の強度の変動幅と、歩行者ではない車両などからの反射電波の強度の変動幅との境界として所定の変動閾値が設定され、物標により反射された反射電波の強度の変動幅の値が所定の変動閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0021】
ここで、反射電波における強度の変動幅は、一定の時間間隔における反射電波における強度の値の差である差分値や、変動する反射電波における強度の振幅値など、変動幅を求める公知の方法で求めた値を用いることができる。
【0022】
上記発明において前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の偏差を合計した値であり、前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の偏差を合計した値である所定の偏差閾値が記憶され、前記情報処理部は、前記受信部によって受信された前記反射電波における強度の偏差を合計した値が、前記記憶部に記憶された前記所定の偏差閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことが望ましい。
【0023】
このように反射電波における強度の偏差の合計値に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。さらに、歩行者からの反射電波の強度の偏差の合計値と、歩行者ではない車両などからの反射電波の強度の偏差の合計値との境界として所定の偏差閾値が設定され、物標により反射された反射電波の強度の偏差の合計値が所定の偏差閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0024】
上記発明において情報処理部は、所定の周期で電波を反射した物標が歩行者であるか否かの判定を繰り返し行い、物標が歩行者であると判定されると、所定の期間は、その後判定の結果に関わらず、物標が歩行者であるとの判定結果を保持することが望ましい。
【0025】
このように物標が歩行者であると一度判定された場合、所定の期間は、例え物標が歩行者ではないと判定されたとしても、物標が歩行者であるとの判断結果を外部に出力しつづけることで、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0026】
一般に、歩行者からの反射電波の強度は変動が激しく、かつ、変動の態様が一定でない。そのため、物標が歩行者であっても、情報処理部における判定のタイミングによって、物標が歩行者であると判定されたり、歩行者ではないと判定されたりする場合がある。この場合であっても、一度、物標を歩行者であると判定した後の一定の期間は、判定の結果に関わらず、物標を歩行者であると判定し続けることにより、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0027】
上記発明において前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の分散の値であり、前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の分散の値である所定の分散閾値が記憶され、前記情報処理部は、前記受信部によって受信された前記反射電波における強度の分散の値が、前記記憶部に記憶された前記所定の分散閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことが望ましい。
【0028】
このように反射電波における強度の分散の値に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定を確実に行うことができる。さらに、歩行者からの反射電波の強度の分散の値と、歩行者ではない車両などからの反射電波の強度の分散の値との境界として所定の分散閾値が設定され、物標により反射された反射電波の強度の分散の値が所定の分散閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0029】
上記発明において情報処理部は、送信部から送信された電波および受信部に受信された反射電波に基づいて、物標の移動速度を算出し、さらに、算出された物標の移動速度が、予め定められた所定の移動速度以上の場合には、物標が前記歩行者でないと判定することが望ましい。
【0030】
このように物標の移動速度が所定の移動速度以上である場合には、物標が歩行者でないと判定することで、反射電波の特性のみに基づいて判定する場合と比較して、歩行者でない物標を歩行者であると誤判断する確率を低減することができる。ここで、所定の移動速度としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0031】
上記発明において受信部は、さらに、反射電波が入射する方向を検知するものであり、情報処理部は、反射電波が受信部に入射する方向に基づいて物標が存在する方向を算出し、送信部から送信された電波および受信部に受信された反射電波に基づいて送信部および受信部から物標までの距離を算出し、算出された物標までの距離、および、物標が存在する方向の時間変化に基づいて、物標の移動方向を算出し、算出された物標の移動方向が車両の進行方向と交差する場合には、電波を反射した物標が歩行者であるか否かを判定する際に用いられる基準を変更して、電波を反射した物標を歩行者であると判定する確率を高めることが望ましい。
【0032】
このように演算により求められた物標の移動方向が車両の進行方向と交差する場合、言い換えると物標が車両の進行方向を横切る場合には、情報処理部における物標が歩行者であるか否かの判定する基準を変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0033】
例えば、電波を反射する物標が移動するものである場合には、その物標は電柱などの固定された構造物である可能性が低い。さらに、移動する物標の移動方向が車両の進行方向を横切る方向である場合には、その物標は同じ車道を走行する先行車である可能性が低い。つまり、物標の移動方向が車両の進行方向と交差する場合には、他の場合と比較して、その物標が歩行者である可能性が高くなる。この場合、基準値を変更して物標が歩行者であると判定する確率を高めることにより、歩行者である物標を歩行者ではないと誤判断する確率を低下させることができる。その一方で、歩行者ではない物標を歩行者であると誤判断する確率は高くなりにくい。
【0034】
ここで、物標が歩行者であるか否かの判定する基準としては、反射電波の強度の値や、反射電波の強度の変動幅や、反射電波の強度の偏差合計の値や、反射電波の強度の分散の値などを例示することができる。
【0035】
上記発明において情報処理部は、算出された物標の移動方向が車両の進行方向と交差する場合には、送信部から送信された電波および受信部に受信された反射電波に基づいて、物標の移動速度を算出し、さらに、算出された物標の移動速度が、予め定められた所定の交差速度範囲内の場合には、電波を反射した物標が歩行者であるか否かを判定する際に用いられる基準を変更して、電波を反射した物標を歩行者であると判定する確率を高めることが望ましい。
【0036】
このように物標の移動方向が車両の進行方向と交差するとともに、物標の移動速度が所定の交差速度範囲内である場合には、情報処理部における物標が歩行者であるか否かの判定する基準を変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0037】
ここで、所定の交差速度範囲としては、歩行者の歩行速度範囲を例示することができ、下限としては高齢者の歩行速度である4km/h程度を挙げることができ、上限としては歩行者が全力で走った際の速度である12km/hから18km/h程度を挙げることができる。
【0038】
本発明の歩行者検出方法は、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、受信された反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比ステップと、対比した結果に基づいて物標が歩行者であるか否かを判定する判定ステップと、を有することを特徴とする。
【0039】
本発明のプログラムは、コンピュータに、車両の前方に向かって電波を送信し、車両の前方に存在する物標から反射された反射電波を受信する検出機能と、受信された反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比機能と、対比した結果に基づいて物標が前記歩行者であるか否かを判定する判定機能と、を実現させることを特徴とする。
【0040】
本発明の歩行者検出方法またはプログラムによれば、受信部により受信された反射電波の特性と、予め記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
【発明の効果】
【0041】
本発明の歩行者検出装置、歩行者検出方法およびプログラムによれば、受信部により受信された反射電波の特性と、予め記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができ、歩行者をより確実に検出することができるという効果を奏する。
【図面の簡単な説明】
【0042】
【図1】本発明の第1の実施形態に係る歩行者検出装置の構成を説明するブロック図である。
【図2】図1の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図3】強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
【図4】本発明の第1の実施形態の第1変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図5】本発明の第1の実施形態の第2変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【図6】本発明の第1の実施形態の第3変形例に係る歩行者検出装置における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【発明を実施するための形態】
【0043】
〔第1の実施形態〕
以下、本発明の第1の実施形態に係る歩行者検出装置1ついて図1から図6を参照して説明する。図1は、本実施形態に係る歩行者検出装置1の構成を説明するブロック図である。
【0044】
本発明に係る歩行者検出装置1は、車両の前方に存在する物標を検出する物標検出装置であり、かつ、検出した物標が歩行者か否かの判定も併せて行うものである。歩行者検出装置1によって検出された物標が歩行者であると判定された場合には、歩行者検出装置1から、車両の前方に歩行者が検出されたことを示す歩行者検出信号が出力される。
【0045】
歩行者検出装置1から出力された歩行者検出信号は、車両の運転者に歩行者の存在を知らせる警報部や、歩行者との距離に応じて車両の走行速度を制御または車両を停止させる自動走行制御部などに入力されるものである。
【0046】
歩行者検出装置1は、いわゆるミリ波を用いて車両の前方に存在する物標を検出するレーダを用いたミリ波センサである。本実施形態では、歩行者検出装置1が設けられた車両と物標との間の距離および相対速度をFM−CW(Frequency Modulation−Continuous Wave)方式で検出し、車両に対する物標が存在する方向(方位)をDBF(Digital Beam Forming)方式で検出する場合に適用して説明する。なお、車両と物標との間の距離および相対速度を検出する方式や、車両に対する物標が存在する方向を検出する方式は、上述の方式とは異なる他の方式であってもよく、特に限定するものではない。
【0047】
また、歩行者検出装置1は、上述のようにミリ波センサのみを用いて物標を検出し、物標が歩行者であるか否かを判定するものであってもよいし、ミリ波センサの他にカメラなどの映像取得部および取得した映像を処理する映像処理部を備えて、これらを併用して物標の検出および物標が歩行者であるか否かの判定を行ってもよく、特に限定するものではない。
【0048】
歩行者検出装置1には、図1に示すように、ミリ波送受信部10と、信号処理部20と、出力I/F部30と、が主に設けられている。
ミリ波送受信部10は、車両の前方にむけてミリ波(電波)を送信するとともに、前方に存在する物標に反射された反射ミリ波(反射電波)を受信するものである。ミリ波送受信部10には、ミリ波信号送信部(送信部)11と、ミリ波信号受信部(受信部)12とが主に設けられている。
【0049】
ミリ波信号送信部11はミリ波を送信するものであり、具体的には、周波数を時間の経過とともに変動(変調)させたミリ波を送信するものである。ミリ波信号送信部11の構成としては、公知の構成を用いることができ、特に限定するものではない。ミリ波の周波数は、縦軸を周波数、横軸を時間としたグラフで表した場合、右上がりの斜辺と右下がりの斜辺とが連続する形状を描くように変調される。
【0050】
ミリ波信号受信部12は物標により反射された反射ミリ波を受信して受信信号を出力するものであり、反射ミリ波の入射方向を検出するものである。本実施形態では、複数、例えば5つの並んだアンテナを備えたミリ波信号受信部12である例に適用して説明する。この場合、反射ミリ波がミリ波信号受信部12に入射する方位によって、5つのアンテナのそれぞれに到達する反射ミリ波の行路の長さが変わる。そのために発生した、それぞれのアンテナで検出された反射ミリ波の間の位相を検出することにより、反射ミリ波の入射方向を検出することができる。
【0051】
信号処理部20は、ミリ波信号受信部12からのミリ波の送信を制御するとともに、反射ミリ波を受信したミリ波信号受信部12から出力される受信信号を処理するものである。信号処理部20には、信号処理用マイコン(情報処理部、コンピュータ)21と、記憶部22と、が主に設けられている。
【0052】
信号処理用マイコン21は、信号の演算処理を行う電子回路であり、信号処理部20における各種制御に係る演算や、入力された受信信号の演算処理などを行うものである。
記憶部22は、RAM(Random Access Memory)やROM(Read Only Memory)などの半導体記憶装置であって、信号処理用マイコン21における演算処理に用いられるプログラムが記憶されるものである。更に記憶部22は、後述するように、物標が歩行者であるか否かの判定に用いられる各種の閾値が予め記憶されているものである。
【0053】
出力I/F部30は、信号処理部20において車両の前方に歩行者が検出された際、言い換えると、物標が歩行者であると判定された際に、信号処理部20から出力される歩行者検出信号を、歩行者検出装置1の外部に出力するインターフェースである。
【0054】
次に、上記の構成からなる歩行者検出装置1における歩行者の検出方法について説明する。図2は、図1の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0055】
まず、車両の電源状態がACC(アクセサリ)オンの状態になると、言い換えると、歩行者検出装置1に電力が供給されると、信号処理部20からミリ波信号送信部11に向けて、ミリ波を送信させる制御信号が出力される。制御信号が入力されたミリ波信号送信部11からは、車両の前方に向けてミリ波が送信される。ミリ波は連続して送信されてもよいし、一定の間隔を空けて離散的に送信されてもよく、特に限定するものではない。
【0056】
車両の前方に物標が存在する場合、ミリ波信号送信部11から送信されたミリ波は物標において反射されて反射ミリ波となる。反射ミリ波は、物標から車両に向かって反射し、その一部がミリ波信号受信部12に受信される。言い換えると反射ミリ波がミリ波信号受信部12に検出される(S11:検出ステップ)。ミリ波信号受信部12は、5つのアンテナのそれぞれから受信した反射ミリ波の受信信号を出力する。
【0057】
ミリ波信号受信部12から出力された受信信号は、信号処理部20の信号処理用マイコン21に入力される。信号処理用マイコン21は入力された受信信号に基づいて、ミリ波を反射した物標が、車両の進行方向を横断するか否かを判定する(S12)。
【0058】
具体的には、まず信号処理用マイコン21は、ミリ波信号受信部12から入力された5つのアンテナに係る受信信号の間の位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は反射ミリ波の入射方向、言い換えると、車両に対するミリ波を反射した物標の方位を演算により求める。
【0059】
さらに信号処理用マイコン21は、ミリ波信号送信部11から送信されたミリ波と、ミリ波信号受信部12により受信された反射ミリ波との位相差を演算により求める。求められた位相差に基づいて、信号処理用マイコン21は、ミリ波を反射した物標と車両との間の距離を演算により求める。ミリ波と反射ミリ波との位相差に基づいて、物標と車両との間の距離を求める演算方法は、公知の演算方法を用いることができ、特に限定するものではない。
【0060】
信号処理用マイコン21は、一旦、演算により求められた物標の方位および物標までの距離の値を記憶部22に記憶させる。所定の時間間隔をおいて、信号処理用マイコン21は、再び物標の方位および物標までの距離を演算により求める。ここで、信号処理用マイコン21は、記憶部22から以前に記憶させた物標の方位および物標までの距離の値を取得し、取得した値から、今回の演算で求めた物標の方位および物標までの距離の値への変化に基づいて、物標の移動方向および移動速度を演算により求める。
【0061】
演算により物標の移動方向および移動速度が求められると、信号処理用マイコン21は、求められた物標の移動方向が車両の進行方向を横断し、且つ、移動速度が横断閾値(交差速度範囲)の範囲内か、言い換えると、物標の移動方向と車両の進行方向とが交差し、且つ、移動速度が横断閾値の範囲内か否かの判定を行う。物標の移動方向が車両の進行方向と交差し、且つ、移動速度が横断閾値の範囲内の場合(YESの場合)には、以後の処理において用いられる後述する各種の閾値を、物標が歩行者であると判定する確率が高くなる歩行者判定用の閾値とする設定を行う(S13)。その一方で、物標の移動方向が車両の進行方向と交差しない、又は、移動速度が横断閾値の範囲外の場合(NOの場合)には、以後の処理において用いられる各種の閾値を規定の値とする設定を行う(S14)。
【0062】
ここで、横断閾値としては、歩行者の歩行速度範囲を例示することができ、下限としては高齢者の歩行速度である4km/h程度を挙げることができ、上限としては歩行者が全力で走った際の速度である12km/hから18km/h程度を挙げることができる。
【0063】
また、各種の閾値における規定の値とは、例えば歩行者検出装置1が工場から出荷される際に設定される値であり、物標が歩行者であるか否かの予測がない状態において、物標が歩行者か、車両や電柱などの構造物かの判別を行う値のことである。歩行者判定用の閾値とは、物標が歩行者であるとの予測がある(可能性が高い)場合において用いられる値であり、規定の値と比較して、値を低く又は高くして物標を歩行者と判定する確率を高めた値のことである。
【0064】
図3は、強度閾値における規定の閾値および歩行者判定用の閾値の関係を説明するグラフである。
その一例として、反射ミリ波の強度の値に基づいて物標が歩行者か否かの判定に用いられる強度閾値における、規定の閾値と歩行者判定用の閾値について図3を参照しながら説明する。強度閾値を用いた判定の場合、反射ミリ波の強度の値が、強度閾値以下のであると物標が歩行者であると判定される。そのため、物標を歩行者と判定する確率を高めた歩行者判定用の強度閾値は、規定の強度閾値と比較して、その値が高くなる。図3では、規定の強度閾値を太線のグラフで示し、歩行者判定用の強度閾値を細点線のグラフで示している。
【0065】
上述のように各種の閾値の設定が行われると、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定を行う(S15:対比ステップ)。強度閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における値の大小によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。強度閾値は、図3に示すように、車両と物標との間の距離が離れるに伴い値が減少し、ある距離以上に離れると略一定の値をとるものである。
【0066】
信号処理用マイコン21は、S15の判定を行う際に、直前の演算により求められた物標までの距離に対応したS13において設定された歩行者判定用の強度閾値、または、S14において設定された規定の強度閾値を記憶部22から取得する。強度閾値を取得した信号処理用マイコン21は、取得した強度閾値と、直近に入力された反射ミリ波の強度の値との対比を行う。反射ミリ波の強度が、取得した強度閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16:判定ステップ)。
【0067】
その一方で反射ミリ波の強度が、取得した強度閾値以上の場合(YESの場合)には、信号処理用マイコン21は、反射ミリ波の強度における変動幅、言い換えると差分値が、変動閾値以上であるか否かの判定を行う(S17:対比ステップ)。変動閾値は、記憶部22に予め記憶されているものであり、反射ミリ波の強度における差分値の大小によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。
【0068】
なお、上述のS15においてYESと一度判定されると、YES判定後の一定の期間(所定の期間)は、反射ミリ波の強度が取得した強度閾値未満でありNOと判定される場合であっても、信号処理用マイコン21はYES判定を維持する。
【0069】
このようにすることで、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
つまり、歩行者からの反射電波の強度は変動が激しく、かつ、変動の態様が一定でない。そのため、物標が歩行者であっても、信号処理用マイコン21における判定のタイミングによって、物標が歩行者であると判定されたり、歩行者ではないと誤って判定されたりする場合がある。この場合であっても、一度、物標を歩行者であると判定した後の一定の期間は、判定の結果に関わらず、物標を歩行者であると判定し続けることにより、歩行者である物標を歩行者ではないと誤った判断をすることを抑制できる。
【0070】
信号処理用マイコン21は、S17の判定を行う際に、S13において設定された歩行者判定用の変動閾値、または、S14において設定された規定の変動閾値を記憶部22から取得する。変動閾値を取得した信号処理用マイコン21は、直近に入力された反射ミリ波の強度の値と、前回又は所定時間前に入力された反射ミリ波の強度の値との差分値を演算により求める。そして、演算により求められた差分値、言い換えると反射ミリ波変動と、取得した変動閾値との対比を行う。反射ミリ波変動が、取得した変動閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16)。
【0071】
その一方で反射ミリ波変動が、取得した変動閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標の移動速度が、速度閾値以上であるか否かの判定を行う(S18:対比ステップ)。速度閾値は、記憶部22に予め記憶されているものであり、物標の移動速度によってミリ波を反射した物標が歩行者か、歩行者でないもの(例えば車両)かに分ける境界を定める値である。例えば、速度閾値としては、歩行者が全力で走った際の速度である12km/hから18km/h程度を例示することができる。
【0072】
信号処理用マイコン21は、S18の判定を行う際に、S13において設定された歩行者判定用の速度閾値、または、S14において設定された規定の速度閾値を記憶部22から取得する。速度閾値を取得した信号処理用マイコン21は、直近に送信されたミリ波と受信された反射ミリ波との間の位相差を算出し、算出された位相差に基づいて物標の移動速度を算出する。そして算出により求められた移動速度が、取得した速度閾値以上の場合(YESの場合)には、信号処理用マイコン21は、物標が歩行者ではないと判定する(S16)。その一方で、算出により求められた移動速度が、取得した速度閾値未満の場合(NOの場合)には、信号処理用マイコン21は、物標が歩行者であると判定する(S19:判定ステップ)。
【0073】
信号処理用マイコン21において物標が歩行者と判定されると、信号処理用マイコン21から出力I/F部30を介して、歩行者検出装置1の外部に向けて歩行者検出信号が出力される。
【0074】
上記の構成によれば、ミリ波信号受信部12により受信された反射ミリ波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、ミリ波を反射した物標が歩行者か否かの判定が行われる。そのため、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定をより確実に検出することができる。
【0075】
反射ミリ波の強度に基づいて物標が歩行者か否かの判定を行うことにより、物標が歩行者か否かの判定をより確実に行うことができる。つまり、歩行者と車両や電柱などの構造物とを比較すると、同じ強度のミリ波を照射した際における歩行者の反射ミリ波の強度は、構造物の反射ミリ波の強度よりも弱くなる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0076】
車両から物標までの距離に応じて異なる複数の強度閾値を予め準備し、信号処理用マイコン21が取得した車両から物標までの距離に対応する強度閾値が複数の強度閾値の中から選択され、物標により反射された反射ミリ波の強度の値が、選択された強度閾値以下であれば物標を歩行者と判断する(S15)ことにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。より具体的には、物標からの反射ミリ波の強度は、車両から物標までの距離に依存して大きく変化するため、車両から物標までの距離に対応する強度閾値を用いることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0077】
反射ミリ波における強度の変動幅に基づいて物標が歩行者か否かの判定を行う(S17)ことにより、物標が歩行者か否かの判定を確実に行うことができる。つまり、歩行者と車両等の構造物とを比較すると、反射ミリ波における強度が時間の経過に伴い大きく変動する。これは、歩行者が車両等の構造物と比較して、複雑な形状であるとともに、形状が時間の経過とともに大きく変化するためと考えられる。この特性に基づくことにより、車両の進行方向に移動する歩行者や、立ち止まっている歩行者であっても、容易に車両や電柱などの構造部と区別することができる。
【0078】
さらに、歩行者からの反射ミリ波の強度の変動幅と、歩行者ではない車両などからの反射ミリ波の強度の変動幅との境界として変動閾値が設定され、物標により反射された反射ミリ波の強度の変動幅の値が変動閾値以上であれば、物標を歩行者と判断することにより、歩行者と歩行者でないものとの区別を容易かつ確実に行うことができる。
【0079】
S18における判定のように物標の移動速度が速度閾値以上である場合には、物標が歩行者でないと判定することで、反射ミリ波の特性のみに基づいて判定する場合と比較して、歩行者でない物標を歩行者であると誤判断する確率を低減することができる。
【0080】
S12からS14に示すように、演算により求められた物標の移動方向が車両の進行方向と交差する場合、言い換えると物標が車両の進行方向を横切る場合には、信号処理用マイコン21における物標が歩行者であるか否かの判定する各種の閾値を歩行者判定用の閾値に変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0081】
例えば、ミリ波を反射する物標が移動するものである場合には、その物標は電柱などの固定された構造物である可能性が低い。さらに、移動する物標の移動方向が車両の進行方向を横切る方向である場合には、その物標は同じ車道を走行する先行車である可能性が低い。つまり、物標の移動方向が車両の進行方向と交差する場合には、他の場合と比較して、その物標が歩行者である可能性が高くなる。この場合、閾値を歩行者判定用の閾値に変更して物標が歩行者であると判定する確率を高めることにより、歩行者である物標を歩行者ではないと誤判断する確率を低下させることができる。その一方で、歩行者ではない物標を歩行者であると誤判断する確率は高くなりにくい。
【0082】
さらに、物標の移動速度が所定の横断閾値の範囲内である場合には、信号処理用マイコン21における物標が歩行者であるか否かの判定する各種の閾値を歩行者横断用の閾値に変更して、物標が歩行者であると判定する確率を高めることにより、歩行者と歩行者でないものとの区別を確実に行うことができる。
【0083】
なお、上述のS15における判定において、車両と物標との間が所定距離のときに受信された反射ミリ波の強度の値と、同じく車両と歩行者との間が所定距離である場合における強度閾値とを対比して判定を行ってもよい。このようにすることで、S15における判定の際の演算処理量が減少し、歩行者と歩行者でないものとの区別を簡易かつ迅速に行うことができる。
【0084】
また、S17における判定において、反射ミリ波における強度の偏差を所定期間にわたって合計した値と、偏差閾値とを対比して判定を行ってもよいし、反射ミリ波における強度の分散の値と、分散閾値とを対比して判定して行ってもよい。このように反射ミリ波における強度の差分値とは異なる手法で変動幅を評価することにより、差分値を利用した判定では、物標が歩行者か否かの判定が困難な場合であっても、安定して判定を行うことができる。
【0085】
ここで、偏差閾値は、記憶部22に予め記憶されているものであり、反射ミリ波における強度の偏差の値の大小によってミリ波を反射した物標が歩行者か、歩行者でないものかに分ける境界を定める値である。分散閾値も同様に、記憶部22に予め記憶されているものであり、反射ミリ波における分散の値の大小によってミリ波を反射した物標が歩行者か、歩行者でないものかに分ける境界を定める値である。
【0086】
〔第1の実施形態の第1変形例〕
次に、本発明の第1の実施形態の第1変形例について図4を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図4を用いて歩行者の検出方法のみを説明する。図4は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0087】
図4に示すように、歩行者検出装置1に対して電力が供給されてから、信号処理用マイコン21が反射ミリ波の強度における変動幅、言い換えると差分値が、変動閾値以上であるか否かの判定を行うまで、言い換えるとS11からS17までは、第1の実施形態における歩行者の検出方法と同様である。S17の判定において、反射ミリ波変動が、取得した変動閾値以上と判定された場合(YESの場合)、信号処理用マイコン21は、物標が歩行者であるとの判定を行う(S19)。言い換えると、信号処理用マイコン21が、物標の移動速度が速度閾値以下であるか否かの判定を行わない点が、第1の実施形態と異なっている。
【0088】
このように反射ミリ波の特性のみに基づいて物標が歩行者であるか否かの判定を行うことで、物標の移動速度に基づく判定も併用する方法と比較して、判定を行う際に必要な演算量を減らすことができる。
【0089】
〔第1の実施形態の第2変形例〕
次に、本発明の第1の実施形態の第2変形例について図5を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図5を用いて歩行者の検出方法のみを説明する。図5は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0090】
図5に示すように、歩行者検出装置1に対して電力が供給されてから、反射ミリ波の検出(S11)までは、第1の実施形態と同様である。その後、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定(S15)から、物標の移動速度が速度閾値以上であるか否かの判定(S18)を行う。これらの判定の結果に基づいて、信号処理用マイコン21は、物標が歩行者ではないとの判定(S16)か、物標が歩行者であるとの判定(S19)を行う。
【0091】
上述のS15からS18までの判定では、それぞれ規定の閾値のみが用いられる点が、第1の実施形態と異なる。これにより、記憶部22が記憶する各種の閾値の数が半減するとともに、判定を行う際に必要な演算量を減らすことができる。
【0092】
〔第1の実施形態の第3変形例〕
次に、本発明の第1の実施形態の第3変形例について図6を参照して説明する。
本実施形態の歩行者検出装置の基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、歩行者の検出方法が異なっている。よって、本実施形態においては、図6を用いて歩行者の検出方法のみを説明する。図6は、本変形例の歩行者検出装置1における検出された物標が歩行者であるか否かの判定方法を説明するフローチャートである。
【0093】
図6に示すように、歩行者検出装置1に対して電力が供給されてから、反射ミリ波の検出(S11)までは、第1の実施形態と同様である。その後、信号処理用マイコン21は、ミリ波信号受信部12により受信された反射ミリ波の強度の値が強度閾値以下であるか否かの判定(S15)から、反射ミリ波の強度における変動幅、変動閾値以上であるか否かの判定(S17)を行う。これらの判定の結果に基づいて、信号処理用マイコン21は、物標が歩行者ではないとの判定(S16)か、物標が歩行者であるとの判定(S19)を行う。
【符号の説明】
【0094】
1…歩行者検出装置、11…ミリ波信号送信部(送信部)、12…ミリ波信号受信部(受信部)、21…信号処理用マイコン(情報処理部、コンピュータ)、22…記憶部、S11…検出ステップ、S15…対比ステップ、S16…判定ステップ、S17…対比ステップ
【特許請求の範囲】
【請求項1】
車両の前方に向かって電波を送信する送信部と、
該送信部から送信された前記電波のうち、前記車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、
歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部と、
前記受信部により受信された前記反射電波の特性を、前記記憶部に記憶された前記歩行者反射電波特性と対比することより、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行う情報処理部と、
が設けられていることと特徴とする歩行者検出装置。
【請求項2】
前記反射電波の特性は、前記物標により反射された前記反射電波の強度であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波の強度の値である所定の強度閾値が記憶されていることを特徴とする請求項1記載の歩行者検出装置。
【請求項3】
前記情報処理部は、前記受信部によって受信された前記反射電波の強度の値が、前記記憶部に記憶された前記所定の強度閾値以下であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項2記載の歩行者検出装置。
【請求項4】
前記記憶部には、少なくとも前記車両から前記物標までの距離に関連した複数の前記所定の強度閾値が予め記憶され、
前記情報処理部は、前記車両から前記物標までの距離の情報を取得し、
前記受信部によって受信された前記反射電波の強度の値が、前記車両から前記物標までの距離に対応する前記所定の強度閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項2記載の歩行者検出装置。
【請求項5】
前記反射電波の特性は、前記物標により反射された前記反射電波における強度の変動幅の値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の変動幅の値である所定の変動閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波の強度の変動幅の値が、前記記憶部に記憶された前記所定の変動閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項6】
前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の偏差を合計した値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の偏差を合計した値である所定の偏差閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波における強度の偏差を合計した値が、前記記憶部に記憶された前記所定の偏差閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項7】
前記情報処理部は、所定の周期で前記電波を反射した前記物標が前記歩行者であるか否かの判定を繰り返し行い、
前記物標が前記歩行者であると判定されると、所定の期間は、その後判定の結果に関わらず、前記物標が前記歩行者であるとの判定結果を保持することを特徴とする請求項5または6に記載の歩行者検出装置。
【請求項8】
前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の分散の値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の分散の値である所定の分散閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波における強度の分散の値が、前記記憶部に記憶された前記所定の分散閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項9】
前記情報処理部は、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて、前記物標の移動速度を算出し、
さらに、
算出された前記物標の移動速度が、予め定められた所定の移動速度以上の場合には、前記物標が前記歩行者でないと判定することを特徴とする請求項1記載の歩行者検出装置。
【請求項10】
前記受信部は、さらに、前記反射電波が入射する方向を検知するものであり、
前記情報処理部は、
前記反射電波が前記受信部に入射する方向に基づいて前記物標が存在する方向を算出し、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて前記送信部および前記受信部から前記物標までの距離を算出し、
算出された前記物標までの距離、および、前記物標が存在する方向の時間変化に基づいて、前記物標の移動方向を算出し、
算出された前記物標の移動方向が前記車両の進行方向と交差する場合には、
前記電波を反射した前記物標が前記歩行者であるか否かを判定する際に用いられる基準を変更して、前記電波を反射した前記物標を前記歩行者であると判定する確率を高めることを特徴とする請求項1から9のいずれか1項に記載の歩行者検出装置。
【請求項11】
前記情報処理部は、
算出された前記物標の移動方向が前記車両の進行方向と交差する場合には、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて、前記物標の移動速度を算出し、
さらに、
算出された前記物標の移動速度が、予め定められた所定の交差速度範囲内の場合には、前記電波を反射した前記物標が前記歩行者であるか否かを判定する際に用いられる基準を変更して、前記電波を反射した前記物標を前記歩行者であると判定する確率を高めることを特徴とする請求項10記載の歩行者検出装置。
【請求項12】
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、
受信された前記反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比ステップと、
対比した結果に基づいて前記物標が前記歩行者であるか否かを判定する判定ステップと、
を有することを特徴とする歩行者検出方法。
【請求項13】
コンピュータに、
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出機能と、
受信された前記反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比機能と、
対比した結果に基づいて前記物標が前記歩行者であるか否かを判定する判定機能と、
を実現させるためのプログラム。
【請求項1】
車両の前方に向かって電波を送信する送信部と、
該送信部から送信された前記電波のうち、前記車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部と、
歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部と、
前記受信部により受信された前記反射電波の特性を、前記記憶部に記憶された前記歩行者反射電波特性と対比することより、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行う情報処理部と、
が設けられていることと特徴とする歩行者検出装置。
【請求項2】
前記反射電波の特性は、前記物標により反射された前記反射電波の強度であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波の強度の値である所定の強度閾値が記憶されていることを特徴とする請求項1記載の歩行者検出装置。
【請求項3】
前記情報処理部は、前記受信部によって受信された前記反射電波の強度の値が、前記記憶部に記憶された前記所定の強度閾値以下であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項2記載の歩行者検出装置。
【請求項4】
前記記憶部には、少なくとも前記車両から前記物標までの距離に関連した複数の前記所定の強度閾値が予め記憶され、
前記情報処理部は、前記車両から前記物標までの距離の情報を取得し、
前記受信部によって受信された前記反射電波の強度の値が、前記車両から前記物標までの距離に対応する前記所定の強度閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項2記載の歩行者検出装置。
【請求項5】
前記反射電波の特性は、前記物標により反射された前記反射電波における強度の変動幅の値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の変動幅の値である所定の変動閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波の強度の変動幅の値が、前記記憶部に記憶された前記所定の変動閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項6】
前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の偏差を合計した値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の偏差を合計した値である所定の偏差閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波における強度の偏差を合計した値が、前記記憶部に記憶された前記所定の偏差閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項7】
前記情報処理部は、所定の周期で前記電波を反射した前記物標が前記歩行者であるか否かの判定を繰り返し行い、
前記物標が前記歩行者であると判定されると、所定の期間は、その後判定の結果に関わらず、前記物標が前記歩行者であるとの判定結果を保持することを特徴とする請求項5または6に記載の歩行者検出装置。
【請求項8】
前記反射電波の特性は、複数の異なる時期に測定された前記反射電波における強度の分散の値であり、
前記記憶部には、前記歩行者反射電波特性に係る前記反射電波における強度の分散の値である所定の分散閾値が記憶され、
前記情報処理部は、前記受信部によって受信された前記反射電波における強度の分散の値が、前記記憶部に記憶された前記所定の分散閾値以上であるか否かに基づいて、前記電波を反射した前記物標が前記歩行者であるか否かの判定を行うことを特徴とする請求項1記載の歩行者検出装置。
【請求項9】
前記情報処理部は、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて、前記物標の移動速度を算出し、
さらに、
算出された前記物標の移動速度が、予め定められた所定の移動速度以上の場合には、前記物標が前記歩行者でないと判定することを特徴とする請求項1記載の歩行者検出装置。
【請求項10】
前記受信部は、さらに、前記反射電波が入射する方向を検知するものであり、
前記情報処理部は、
前記反射電波が前記受信部に入射する方向に基づいて前記物標が存在する方向を算出し、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて前記送信部および前記受信部から前記物標までの距離を算出し、
算出された前記物標までの距離、および、前記物標が存在する方向の時間変化に基づいて、前記物標の移動方向を算出し、
算出された前記物標の移動方向が前記車両の進行方向と交差する場合には、
前記電波を反射した前記物標が前記歩行者であるか否かを判定する際に用いられる基準を変更して、前記電波を反射した前記物標を前記歩行者であると判定する確率を高めることを特徴とする請求項1から9のいずれか1項に記載の歩行者検出装置。
【請求項11】
前記情報処理部は、
算出された前記物標の移動方向が前記車両の進行方向と交差する場合には、
前記送信部から送信された前記電波および前記受信部に受信された前記反射電波に基づいて、前記物標の移動速度を算出し、
さらに、
算出された前記物標の移動速度が、予め定められた所定の交差速度範囲内の場合には、前記電波を反射した前記物標が前記歩行者であるか否かを判定する際に用いられる基準を変更して、前記電波を反射した前記物標を前記歩行者であると判定する確率を高めることを特徴とする請求項10記載の歩行者検出装置。
【請求項12】
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出ステップと、
受信された前記反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比ステップと、
対比した結果に基づいて前記物標が前記歩行者であるか否かを判定する判定ステップと、
を有することを特徴とする歩行者検出方法。
【請求項13】
コンピュータに、
車両の前方に向かって電波を送信し、前記車両の前方に存在する物標から反射された反射電波を受信する検出機能と、
受信された前記反射電波における特性と、予め記憶された歩行者から反射された電波における特性とを対比する対比機能と、
対比した結果に基づいて前記物標が前記歩行者であるか否かを判定する判定機能と、
を実現させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−229948(P2012−229948A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−97240(P2011−97240)
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]