
歩行者検知装置
【課題】車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる歩行者検知装置を提供する。
【解決手段】本発明の歩行者検知装置は、車両周辺の画像を取得する画像取得手段と、車両が右折または左折することを予測する右左折予測手段と、取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測情報に基づいて設定する探索範囲モード設定手段と、探索範囲モードに基づいて歩行者を探索する歩行者探索手段と、探索結果を通知する結果通知手段とを備え、探索範囲モード設定手段は、車両と、車両が右折または左折する交差点との距離に基づいて、探索範囲モードを設定する。
【解決手段】本発明の歩行者検知装置は、車両周辺の画像を取得する画像取得手段と、車両が右折または左折することを予測する右左折予測手段と、取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測情報に基づいて設定する探索範囲モード設定手段と、探索範囲モードに基づいて歩行者を探索する歩行者探索手段と、探索結果を通知する結果通知手段とを備え、探索範囲モード設定手段は、車両と、車両が右折または左折する交差点との距離に基づいて、探索範囲モードを設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載される歩行者検知装置に関し、より特定的には、最適な歩行者探索領域を設定しながら歩行者を検知する歩行者検知装置に関する。
【背景技術】
【0002】
従来、車両に搭載される歩行者検知装置は、カメラによって取得した画像から、車両の前方等に存在する歩行者を検知する。そして、車両と、検知した歩行者とが衝突する危険性があれば、当該衝突を回避するように運転者に警告したり、車両の走行速度を制御したりするプリクラッシュセーフティシステムが開発されている。
【0003】
さらに、通常、カメラ等によって取得可能な画像領域全体において障害物を検知するが、特許文献1に開示されている障害物検知装置は、車両と障害物との衝突の可能性が高いと予想される場所において、道路状況に対応した障害物検知領域を設定している。
【0004】
具体的には、特許文献1に開示されている障害物検知装置は、カーナビゲーション装置に記録されている地図情報、およびカメラによって取得された画像情報に基づいて、障害物検知領域を設定し、さらには、車両走行中に運転者のハンドル操作(ステア角)、および車速等に応じて、車両の予測進路に応じた障害物検知領域を設定している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−271766号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されている障害物検知装置では、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を特別考慮して障害物検知領域を設定していないため、当該歩行者を精度よく検知することができない。
【0007】
それ故に、本発明の目的は、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる歩行者検知装置を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の歩行者検知装置は、車両に搭載される歩行者検知装置であって、車両周辺の画像を取得する画像取得手段と、車両が右折または左折することを予測する右左折予測手段と、画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測手段による予測情報に基づいて設定する探索範囲モード設定手段と、探索範囲モード設定手段によって設定された探索範囲モードに基づいて、画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、歩行者探索手段によって探索された結果を通知する結果通知手段とを備え、探索範囲モード設定手段は、車両と、車両が右折または左折する交差点との距離に基づいて、探索範囲モードを設定することを特徴とする。
かかる構成により、画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測手段による予測情報に基づいて設定するため、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。
【0009】
好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、少なくとも1つを高い精度で探索する特定領域を設定することを特徴とする。
かかる構成により、分割された複数の探索領域のうち、少なくとも1つを高い精度で探索するため、高効率に歩行者を検知することができる。
【0010】
好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、特定領域以外の領域を低い精度で探索することを特徴とする。
かかる構成により、高い精度で探索する特定領域と、低い精度で探索する特定領域以外の領域とが設定されるため、車両と衝突の危険性が高い領域において歩行者を重点的に探索することができる。
【0011】
好ましい探索範囲モード設定手段は、車両が、右左折予測手段によって車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、探索範囲偏重モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、探索範囲偏重モードを探索範囲モードとして設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。
【0012】
さらに好ましい探索範囲モード設定手段は、右左折予測手段によって車両が右折または左折すると予測された交差点を、車両の右折または左折開始後予め設定された第2タイミングで、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両の右折または左折開始後予め設定された第2タイミングで、探索範囲均等モードを探索範囲モードとして設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく広範囲において検知することができる。
【0013】
また、さらに好ましい探索範囲モード設定手段は、車両と、右左折予測手段によって車両が右折または左折すると予測された交差点との距離を算出する車両位置算出手段と、車両位置算出手段によって算出された距離が予め設定された閾値未満であるか否かを判定する車両位置判定手段と、車両位置判定手段によって距離が閾値未満であると判定された場合、探索範囲偏重モードを探索範囲モードとして選択し、車両位置判定手段によって距離が閾値以上であると判定された場合、探索範囲均等モードを探索範囲モードとして選択する探索範囲モード選択手段とを含むことを特徴とする。
かかる構成により、車両と、当該車両が右折または左折すると予測された交差点との距離に基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、交差点における車両走行の状況に応じて、歩行者を精度よく検知することができる。
【0014】
さらに好ましくは、右左折予測手段によって車両が左折すると予測された交差点を車両の左折開始後において、車両位置判定手段は、車両位置算出手段によって算出された距離が車両の左折後における走行車線幅未満であるか否かを判定し、探索範囲モード選択手段は、車両位置判定手段によって距離が走行車線幅未満であると判定された場合、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両と、当該車両が左折すると予測された交差点との距離に基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の左折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0015】
さらに好ましくは、右左折予測手段によって車両が右折すると予測された交差点を車両の右折開始後において、車両位置判定手段は、車両が交差点を通過したか否かを判定し、探索範囲モード選択手段は、車両位置判定手段によって車両が交差点を通過したと判定された場合、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両が交差点を通過したか否かに基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の右折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0016】
また、好ましくは、車両の右折または左折を示すウィンカーを制御するウィンカー制御手段を、さらに備え、第2タイミングは、ウィンカー制御手段によって車両の右折または左折が示されているウィンカーがキャンセルされるタイミングであることを特徴とする。
かかる構成により、ウィンカーのキャンセルに基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の右折または左折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0017】
また、好ましくは、右左折予測手段によって車両が左折すると予測された場合、画像領域内のうちの左側領域は、画像領域内のうちの右側領域より高い精度で探索され、右左折予測手段によって車両が右折すると予測された場合、画像領域内のうちの右側領域は、画像領域内のうちの左側領域より高い精度で探索されることを特徴とする。
かかる構成により、車両が左折または右折する予測に基づいて、画像領域内のうち、高精度で探索する領域を設定するため、当該車両と衝突の危険性が高い歩行者を精度よく検知することができる。
【0018】
また、好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、特定領域を高い精度で探索し、特定領域以外の領域を探索しないことを特徴とする。
かかる構成により、車両と衝突の危険性が高い歩行者を集中的に探索することができる。
【0019】
好ましくは、高い精度は、高負荷であること、および/または高精細であることを特徴とする。
かかる構成により、より正確に歩行者を検知することができる。
【0020】
上記目的を達成するために、本発明の歩行者検知方法は、車両に搭載される歩行者検知装置が実行する歩行者検知方法であって、車両周辺の画像を取得する画像取得ステップと、車両が右折または左折することを予測する右左折予測ステップと、車両と、右左折予測ステップで車両が右折または左折すると予測された交差点との距離を算出する車両位置算出ステップと、画像取得ステップで取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得ステップで取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、車両位置算出ステップで算出された車両と交差点との距離に基づいて設定する探索範囲モード設定ステップと、探索範囲モード設定ステップで設定された探索範囲モードに基づいて、画像取得ステップで取得された画像から歩行者を探索する歩行者探索ステップと、歩行者探索ステップによって探索された結果を通知する結果通知ステップとを含む。
【0021】
また、上記目的を達成するために、上述した本発明の歩行者検知装置の各構成が行うそれぞれの処理は、一連の処理手順を与える歩行者検知方法として捉えることができる。この方法は、一連の処理手順をコンピュータに実行させるためのプログラムの形式で提供される。このプログラムは、コンピュータ読み取り可能な記録媒体に記録された形態で、コンピュータに導入されてもよい。
【発明の効果】
【0022】
上述のように、本発明の歩行者検知装置によれば、車両が右折または左折する場合、当該車両が右折または左折することを予測し、当該予測に基づいて歩行者を探索する歩行者探索領域を設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。さらに、車両の右折または左折状態に応じて、歩行者を探索する歩行者探索領域を広範囲にするため、当該車両が右折または左折する際、および右折または左折した直後において、歩行者を精度よく広範囲において検知することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施形態に係る歩行者検知装置100を示す図
【図2】本発明の第1の実施形態に係る歩行者検知装置100を機能的に示すブロック図
【図3】本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(左折)300を示すフローチャート
【図4】車両に搭載されたカメラが当該車両の前方周辺を撮像する様子を示す図
【図5】図4に示したように車両に搭載されたカメラによって撮像された当該車両の前方周辺画像を示す図
【図6】カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測する様子を示す図
【図7】第1距離P1を示す図
【図8】GPS情報および地図情報に基づいて第1距離P1を算出する方法を示す図
【図9】車両が左折すると予測されている交差点に近づいて、車両の左側に注視する様子を示す図
【図10】車両が左折すると予測されている交差点において、車両の左折状態が進んで、車両の左側および右側に注視する様子を示す図
【図11】車両の左側領域と車両の右側領域とにおける演算負荷比率を示す図
【図12】車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる様子を示す図
【図13】本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(右折)400を示すフローチャート
【図14】カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測する様子を示す図
【図15】第1距離P1を示す図
【図16】車両が右折すると予測されている交差点に近づいて、車両の右側に注視する様子を示す図
【図17】車両が交差点を通過していない様子を示す図
【図18】車両が右折すると予測されている交差点において、車両の右折状態が進んで、車両の左側および右側に注視する様子を示す図
【図19】本発明の第2の実施形態に係る歩行者検知装置500を示す図
【図20】本発明の第2の実施形態に係る歩行者検知装置500を機能的に示すブロック図
【図21】本発明の第2の実施形態に係る歩行者検知装置500が実行する歩行者検知方法(左折)700を示すフローチャート
【発明を実施するための形態】
【0024】
以下、本発明の各実施形態について、図面を参照しながら説明する。
<第1の実施形態>
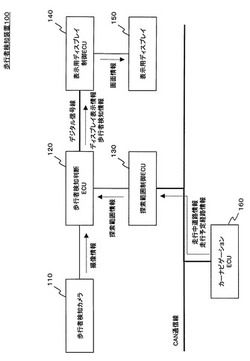
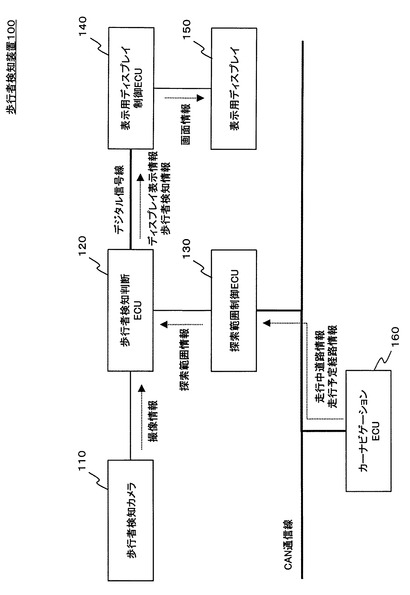
図1は、本発明の第1の実施形態に係る歩行者検知装置100を示す図である。図1において、歩行者検知装置100は、歩行者検知カメラ110と、歩行者検知判断ECU(Electronic Control Unit)120と、探索範囲制御ECU130と、表示用ディスプレイ制御ECU140と、表示用ディスプレイ150と、カーナビゲーションECU160とを備える。
【0025】
図1において、歩行者検知カメラ110は、例えば、車両の前方部に搭載されており、主として、当該車両の前方に存在する歩行者を検知するための画像を撮像する。具体的には、歩行者検知カメラ110には赤外線カメラが用いられる。
【0026】
歩行者検知判断ECU120は、歩行者検知カメラ110によって撮像された画像(撮像情報)から歩行者を探索し、歩行者が存在するか否かを判断する。なお、歩行者検知判断ECU120は、探索範囲制御ECU130からの探索範囲情報に基づいて、歩行者の存在に注意すべき領域について、歩行者を探索する。
【0027】
探索範囲制御ECU130は、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に基づいて、歩行者の存在に注意すべき領域を判断し、歩行者を探索する探索範囲を制御する。なお、歩行者の存在に注意すべき領域、および探索範囲は、カーナビゲーションECU160からの走行中道路情報、および走行予定経路情報に基づいて制御される。当該制御方法についての詳細な説明は後述する。
【0028】
表示用ディスプレイ制御ECU140は、歩行者検知判断ECU120からのディスプレイ表示情報、および歩行者検知情報に基づいて、表示用ディスプレイ150に表示する画面を制御する。例えば、表示用ディスプレイ制御ECU140は、歩行者検知カメラ110によって撮像された画像を表示用ディスプレイ150に表示させ、当該画像領域内において検知した歩行者を強調して表示させてもよい。なお、表示用ディスプレイ制御ECU140と、歩行者検知判断ECU120とは、例えば、デジタル信号線を介して通信する。さらに、当該画像領域内において歩行者を検知した場合、当該検知した歩行者を表示用ディスプレイに表示させるだけでなく、例えば、警告音を鳴らすことによって運転者に通知してもよい。
【0029】
表示用ディスプレイ150は、表示用ディスプレイ制御ECU140からの画面情報に基づいて、画面表示する。
【0030】
カーナビゲーションECU160は、GPS(Global Positioning System)情報、およびメモリ等に記録されている地図情報に基づいて、車両が現在走行している道路の情報(走行中道路情報)、および現在地から目的地までの経路情報(走行予定経路情報)を探索範囲制御ECU130に通知する。なお、カーナビゲーションECU160と探索範囲制御ECU130とは、例えば、CAN(Controller Area Network)通信線を介して通信する。
【0031】
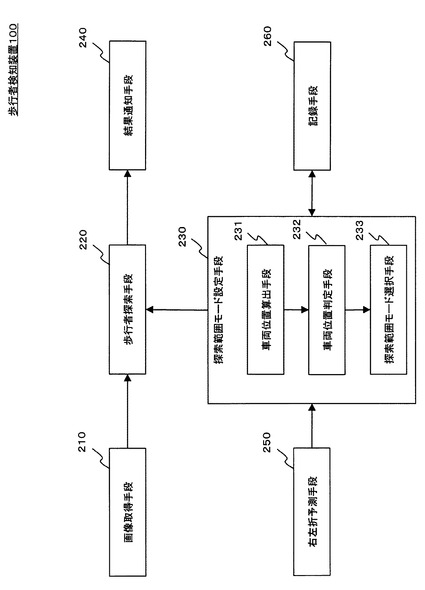
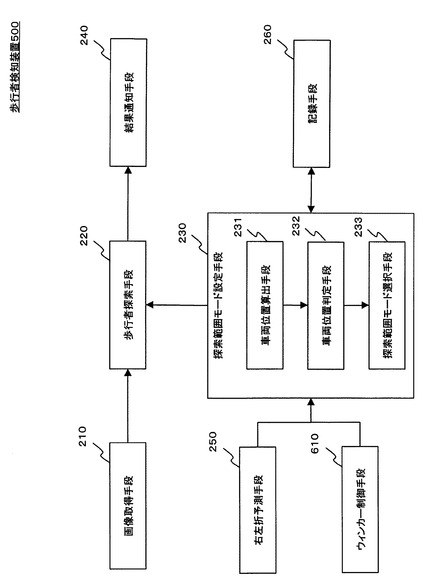
図2は、本発明の第1の実施形態に係る歩行者検知装置100を機能的に示すブロック図である。図2において、歩行者検知装置100は、画像取得手段210と、歩行者探索手段220と、探索範囲モード設定手段230と、結果通知手段240と、右左折予測手段250と、記録手段260とを備える。
【0032】
画像取得手段210は、歩行者検知カメラ110によって車両周辺を撮像し、当該車両周辺の画像を取得する。
【0033】
歩行者探索手段220は、歩行者検知判断ECU120を用いて、画像取得手段210によって取得された画像から歩行者を探索する。なお、歩行者探索手段220は、画像取得手段210によって取得された画像領域内を一定の演算負荷で探索したり、当該画像領域内のうちの特定領域を集中的に探索したりする。
【0034】
探索範囲モード設定手段230は、探索範囲制御ECU130を用いて、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に基づいて、歩行者の存在に注意すべき領域を判断し、画像取得手段210によって取得される画像から歩行者を探索する探索範囲モードを設定する。
【0035】
より詳細には、探索範囲モード設定手段230は、車両位置算出手段231と、車両位置判定手段232と、探索範囲モード選択手段233とを含む。
【0036】
車両位置算出手段231は、車両と、当該車両が右折または左折する交差点との距離を算出する。具体的には、車両位置算出手段231は、カーナビゲーションECU160を用いて、カーナビゲーションシステムにおけるGPS情報、および地図情報に基づいて、車両の位置を取得し、当該交差点との距離を算出する。
【0037】
車両位置判定手段232は、車両位置算出手段231によって算出された車両と交差点との距離が予め設定された閾値未満であるか否かを判定する。換言すれば、車両位置判定手段232は、車両が交差点に近づいているか否かを判定する。さらに、車両位置判定手段232は、車両が当該交差点を右折または左折したか(右折または左折状態が進んでいるか)否かを判定する。
【0038】
探索範囲モード選択手段233は、車両位置判定手段232によって車両が交差点に近づいていると判定された場合、探索範囲偏重モードを探索範囲モードとして選択する。そして、探索範囲モード選択手段233は、車両位置判定手段232によって車両が交差点を右折または左折した(右折または左折状態が進んでいる)と判定された場合、探索範囲均等モードを探索範囲モードとして選択する。ここで、探索範囲均等モードとは、画像領域内を予め設定された一定の演算負荷で探索し、探索範囲偏重モードとは、画像領域内のうち、高い演算負荷で探索する第1探索領域と低い演算負荷で探索する第2探索領域とを設定することをいう。
【0039】
なお、上述した歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲モードに基づく探索範囲および演算負荷で、画像取得手段210によって取得された画像から歩行者を探索する。探索範囲モードに対応する探索範囲および演算負荷について、詳細は後述する。
【0040】
結果通知手段240は、歩行者探索手段220によって探索された結果を通知する。具体的には、結果通知手段240は、検知した歩行者を表示用ディスプレイ150に表示してもよいし、さらに、車両と検知した歩行者とが衝突する危険性があれば、当該衝突を回避するように運転者に警告してもよい。
【0041】
右左折予測手段250は、典型的には、カーナビゲーションシステムであって、GPS情報、および地図情報に基づいて、目的地までの走行予定経路を求め、当該走行予定経路から車両が右折または左折することを予測する。
【0042】
記録手段260は、典型的にはメモリ等であって、記録手段260には、カーナビゲーションシステムにおける地図情報、および上述した探索範囲モードの具体的な設定内容等が記録されている。
【0043】
次に、本発明の第1の実施形態に係る歩行者検知装置100が実行する処理の流れについて説明する。
【0044】
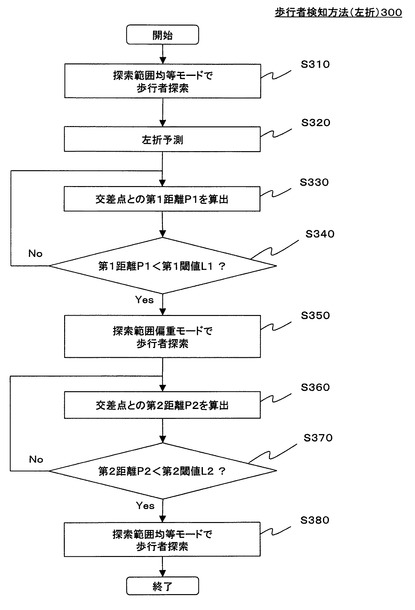
図3は、本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(左折)300を示すフローチャートである。図3において、歩行者検知方法(左折)300は、探索範囲均等モード設定ステップS310と、左折予測ステップS320と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、第2距離算出ステップS360と、第2距離判定ステップS370と、探索範囲均等モード設定ステップS380とを含む。
【0045】
通常、車両に搭載される歩行者検知装置は、カメラ等によって取得可能な画像領域全体において、一定の演算負荷で歩行者を探索する。さらに、ここでは、車両に搭載されているカーナビゲーションシステムによって、目的地までのルート案内が実施されていることを前提とする。
【0046】
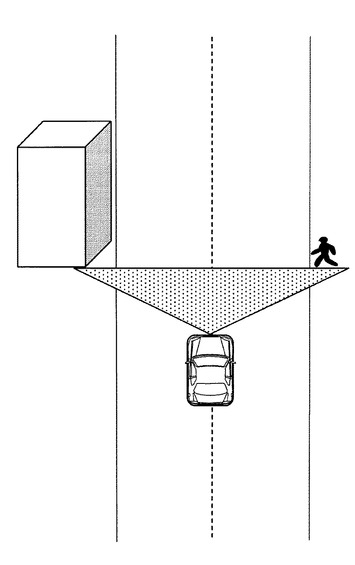
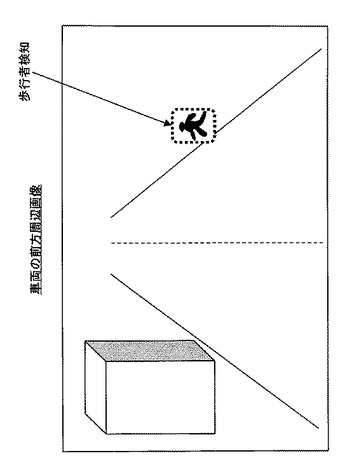
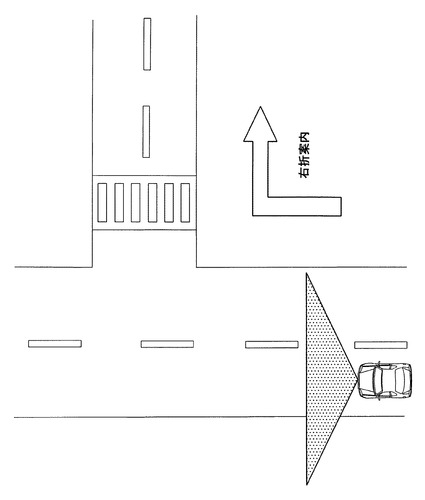
先ず、探索範囲均等モード設定ステップS310において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。同時に、画像取得手段210は、車両の前方周辺を撮像し、当該車両の前方周辺画像を取得している。図4は、車両に搭載されたカメラが当該車両の前方周辺を撮像する様子を示す図である。図4において、画像取得手段210は、カメラによって取得可能な領域全体を撮像している。図5は、図4に示したように車両に搭載されたカメラによって撮像された当該車両の前方周辺画像を示す図である。歩行者探索手段220は、探索範囲モード設定手段230によって選択された探索範囲均等モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索し、図5に示すように、車両の前方周辺画像から歩行者を検知する。
【0047】
このように、通常、車両に搭載される歩行者検知装置100は、車両に搭載されたカメラによって撮像し、取得された当該車両の前方周辺画像領域内を一定の演算負荷で歩行者を探索している。
【0048】
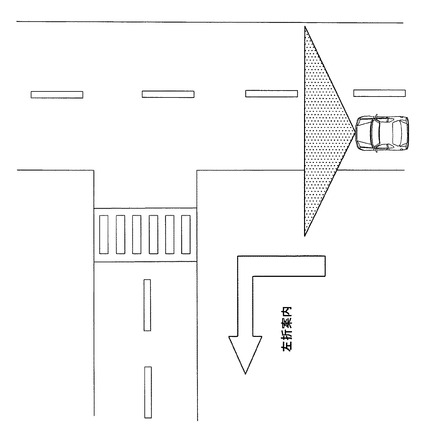
次に、左折予測ステップS320において、右左折予測手段250は、車両が左折することを予測する。例えば、カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測できる。図6は、カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測する様子を示す図である。図6において、車両が、右左折予測手段250によって車両が左折すると予測された交差点に近づいている。
【0049】
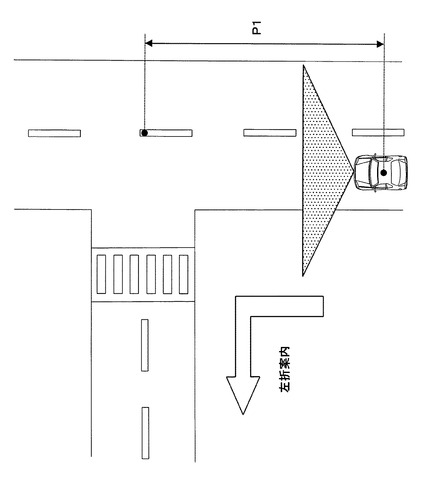
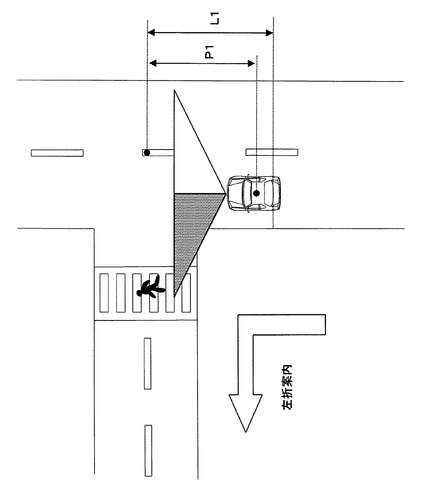
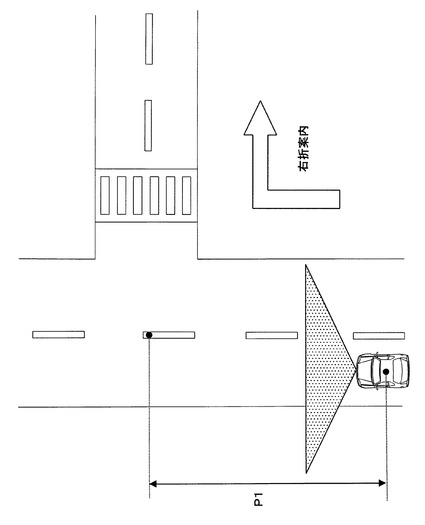
第1距離算出ステップS330において、車両位置算出手段231は、車両と、当該車両が左折する交差点との距離である第1距離P1を算出する。図7は、第1距離P1を示す図である。図7に示すように、第1距離P1は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が左折すると予測される交差点の中心との距離である。
【0050】
具体的に、第1距離P1は、GPS情報および地図情報に基づいて算出される。図8は、GPS情報および地図情報に基づいて第1距離P1を算出する方法を示す図である。図8において、地図情報とは、ノードとリンクとによって構成されている。図8に示すように、ノードaとノードbとのリンク長A、ノードbとノードcとのリンク長B、ノードcとノードdとのリンク長C、およびノードdとノードeとのリンク長Eとする。さらに、ノードaとノードbとの間であって、ノードaから距離Xの位置に車両が存在する場合、当該車両から交差点の中心ノードeまでの第1距離P1は、以下の(数1)によって算出される。
P1=(A−X)+B+C+D ・・・(数1)
なお、ノードaから距離Xについては、車両がノードaを通過してからの経過時間、および車両のノードa通過後における平均速度に基づいて算出し推定しても構わない。
【0051】
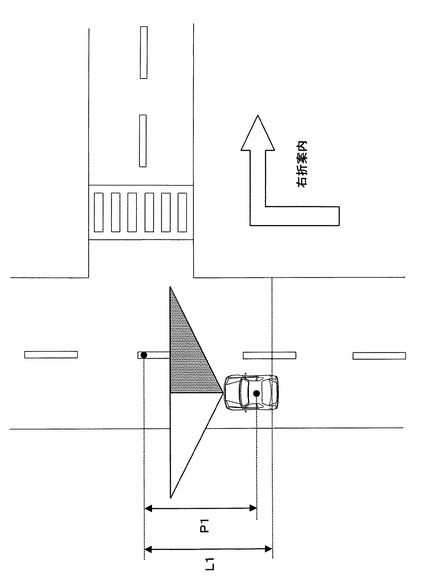
第1距離判定ステップS340において、車両位置判定手段232は、第1距離算出ステップS330で算出された第1距離P1が第1閾値L1未満であるか否かを判定する。ここで、第1閾値L1は、予め設定された距離であって、換言すれば、車両位置判定手段232は、第1距離P1に基づいて、車両が交差点に近づいているか否かを判定する。
【0052】
第1距離判定ステップS340で第1距離P1が第1閾値L1未満であると判定された場合、探索範囲偏重モード設定ステップS350に進む(第1距離判定ステップS340のYes)。
【0053】
一方、第1距離判定ステップS340で第1距離P1が第1閾値L1以上であると判定された場合、第1距離算出ステップS330に戻る(第1距離判定ステップS340のNo)。
【0054】
換言すれば、所定の時間間隔で、第1距離算出ステップS330および第1距離判定ステップS340を繰り返し、車両が交差点に近づいているか否かを監視している。
【0055】
なお、第1閾値L1は、車両が左折すると予測されている交差点に近づく際、およびその後車両が左折する際、車両の左側における歩行者に注視すべき範囲を考慮して設定される。具体的には、車両が左折する際に、車両の左側における歩行者を巻き込む危険性があるため、車両が左折する前から予め注視することによって、適切に歩行者を検知する。また、車両が左折した直後の横断歩道を横断する歩行者について、車両が左折する前から予め注視して適切に歩行者を検知する。
【0056】
また、第1閾値L1は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、車両の速度に応じて車両が交差点に侵入するタイミングが変動するため、第1閾値L1は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0057】
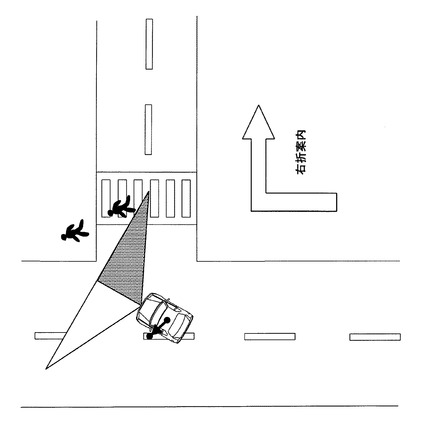
探索範囲偏重モード設定ステップS350において、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択する。図9は、車両が左折すると予測されている交差点に近づいて、車両の左側に注視する様子を示す図である。図9において、車両が左折すると予測されている交差点に近づいた場合(第1距離P1<第1閾値L1)、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の左側領域において歩行者を探索するように設定する。
【0058】
道路状況を考慮すると、車両の右側領域には歩行者が存在する可能性は低いため、当該右側領域において歩行者を探索せず、当該右側領域において歩行者を探索しない分、車両の左側領域において演算負荷を上げて歩行者を探索する。具体的には、図5に示した車両に搭載されたカメラによって撮像された当該車両の前方周辺画像において、当該画像領域内のうちの右側領域において探索処理をせず、当該画像領域内のうちの左側領域において高精度に探索処理を行うように設定する。
【0059】
なお、ここでは、車両の右側領域には歩行者が存在する可能性は低いため、当該右側領域において歩行者を探索せず、車両の左側領域のみにおいて歩行者を探索するように設定しているが、これに限定されるものではない。例えば、車両の左側における歩行者に注視すべき範囲を、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像のうちの左側半分領域でなく、当該画像全体領域のうち左側3分の1領域、または当該画像全体領域のうち左側3分の2領域等に設定しても構わない。また、歩行者に注視すべき範囲でない車両の右側領域において、演算負荷を下げて歩行者を探索しても構わない。
【0060】
さらに、探索範囲偏重モードの詳細な設定内容は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、探索範囲偏重モードの詳細な設定内容は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0061】
そして、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索する。
【0062】
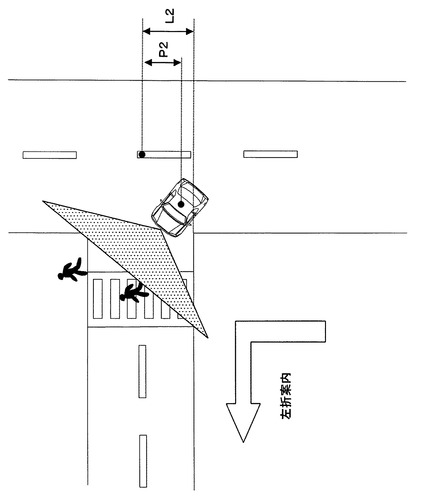
第2距離算出ステップS360において、車両位置算出手段231は、探索範囲偏重モードを探索範囲モードとして設定した後に、車両と、当該車両が左折する交差点との距離である第2距離P2を算出する。第2距離P2は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が左折すると予測される交差点の中心との距離である。なお、第2距離P2は、GPS情報および地図情報に基づいて算出され、具体的な算出方法については、上述した第1距離P1の算出方法と同様であるため、詳細な説明は省略する。
【0063】
第2距離判定ステップS370において、車両位置判定手段232は、第2距離算出ステップS360で算出された第2距離P2が第2閾値L2未満であるか否かを判定する。
【0064】
第2距離判定ステップS370で第2距離P2が第2閾値L2未満であると判定された場合、探索範囲均等モード設定ステップS380に進む(第2距離判定ステップS370のYes)。
【0065】
一方、第2距離判定ステップS370で第2距離P2が第2閾値L2以上であると判定された場合、第2距離算出ステップS360に戻る(第2距離判定ステップS370のNo)。
【0066】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、第2距離算出ステップS360および第2距離判定ステップS370を繰り返し、車両の左折状態が進んでいるか否かを監視している。
【0067】
なお、第2閾値L2は、車両が左折すると予測されている交差点を左折する際、車両が左折した直後の横断歩道を横断する歩行者に注視すべき範囲を考慮して設定される。具体的には、車両が左折する際に、探索範囲偏重モード設定ステップS350で探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の左側領域において歩行者を探索するように設定されていたが、左折状態が進んだ場合、車両の右側領域においても歩行者を探索することが必要となる。
【0068】
また、第2閾値L2は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、車両の速度に応じて車両が交差点に侵入するタイミングおよび交差点を左折し、通過するタイミングが変動するため、第2閾値L2は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0069】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。図10は、車両が左折すると予測されている交差点において、車両の左折状態が進んで、車両の左側および右側に注視する様子を示す図である。図10において、車両が左折すると予測されている交差点において、車両の左折状態が進んだ場合(第2距離P2<第2閾値L2)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。換言すれば、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像領域内のうちの左側領域において高負荷で探索処理を行っていた状態から、当該車両の前方周辺画像領域内全体を一定負荷で探索処理を行う状態に切り替える。
【0070】
なお、ここでは、第2閾値L2は、車両の左折後における走行車線幅とし、第2距離P2が第2閾値L2未満となった場合、車両の左折状態が進んでいると判定している。第2閾値L2は、車両の左折後における走行車線幅に限定されるものではなく、車両の左折状態が進んでいるか否かを判定可能であれば、その他の値であってもよく、さらに、交差点毎、車両の速度および/または加速度に応じて設定しても構わない。
【0071】
上述したように、歩行者検知装置100は、車両が左折する場合、車両と交差点との距離に応じて、歩行者を探索する領域を切り替える。これにより、交差点における車両走行の状況に応じて、歩行者に注視すべき範囲と探索処理における演算量とを考慮して、適切に歩行者を検知する。
【0072】
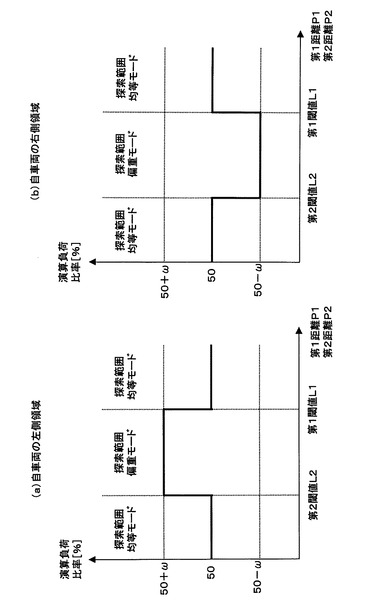
図11は、車両の左側領域と車両の右側領域とにおける演算負荷比率を示す図である。図11(a)は、車両の左側領域における演算負荷比率を示す図であり、図11(b)は、車両の右側領域における演算負荷比率を示す図である。
【0073】
先ず、車両と当該車両が左折する交差点との第1距離P1が第1閾値以上の場合(車両が交差点に近づいていない場合)、探索範囲均等モードが探索範囲モードとして選択されている。つまり、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とは50[%]であって、均等である。
【0074】
次に、車両と当該車両が左折する交差点との第1距離P1が第1閾値未満の場合(車両が交差点に近づいている場合)、探索範囲偏重モードが探索範囲モードとして選択されている。つまり、車両の左側領域における演算負荷比率を50+ω[%]とし、車両の右側領域における演算負荷比率を50−ω[%]とする。歩行者に注視すべき範囲である車両の左側領域において、ω[%]分、演算負荷を上げ、歩行者が存在する可能性が低い車両の右側領域において、ω[%]分、演算負荷を下げている。これにより、状況に応じた高精度かつ高効率な歩行者探索処理を実現している。
【0075】
そして、車両と当該車両が左折する交差点との第2距離P2が第2閾値未満の場合(車両の左折状態が進んでいる場合)、探索範囲均等モードが探索範囲モードとして選択されている。
【0076】
なお、演算負荷比率の上昇下降範囲であるωは、0〜50[%]であって、探索範囲偏重モードにおいて車両の右側領域の探索処理をしない場合は、ωは、50[%]を設定すればよい。
【0077】
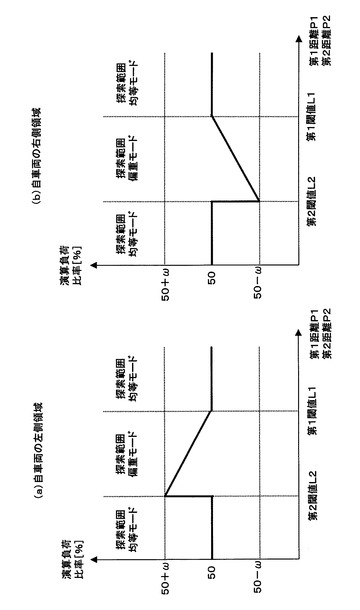
また、探索範囲偏重モードを選択している間、ωを可変とし、例えば、車両が交差点に近づくにつれて、車両の左側領域において演算負荷を徐々に上げ、車両の右側領域において演算負荷を徐々に下げる。
【0078】
図12は、車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる様子を示す図である。図12(a)は、車両の左側領域における演算負荷比率を示す図であり、図12(b)は、車両の右側領域における演算負荷比率を示す図である。
【0079】
車両と当該車両が左折する交差点との第1距離P1が第1閾値以上の場合(車両が交差点に近づいていない場合)、および車両と当該車両が左折する交差点との第2距離P2が第2閾値未満の場合(車両の左折状態が進んでいる場合)、探索範囲均等モードが探索範囲モードとして選択されている。この場合、図11と同様に、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とは50[%]であって、均等である。
【0080】
次に、車両と当該車両が左折する交差点との第1距離P1が第1閾値未満の場合(車両が交差点に近づいている場合)、探索範囲偏重モードが探索範囲モードとして選択され、車両の左側領域における演算負荷比率を50[%]から徐々に上げて、車両と当該車両が左折する交差点との第2距離P2が第2閾値未満となる場合(車両の左折状態が進んだ場合)、当該演算負荷比率を50+ω[%]としている。同時に、車両の右側領域における演算負荷比率は、50[%]から50−ω[%]まで徐々に下げている。
【0081】
なお、ここでは、車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる一例を示したが、これに限定されるものではない。例えば、演算負荷比率を関数(折れ線、曲線)に従って変化させてもよく、また、歩行者を探索する画像領域について、左右の2分割でなく3分割以上、または遠近を考慮して上下分割された領域毎に演算負荷比率を設定および変化させても構わない。
【0082】
以上のように、本発明の第1の実施形態に係る歩行者検知装置100によれば、車両が交差点を左折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の左側領域について演算負荷を上げて歩行者を探索し、その後、車両の左折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を左折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0083】
次に、車両が右折する場合について、説明する。
図13は、本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(右折)400を示すフローチャートである。図13において、歩行者検知方法400(右折)は、探索範囲均等モード設定ステップS310と、右折予測ステップS410と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、交差点相対位置算出ステップS420と、交差点通過判定ステップS430と、探索範囲均等モード設定ステップS380とを含む。図13において、図3に示した同一のステップ(処理)については、同一の参照符号を付し、詳細な説明は省略する。
【0084】
先ず、探索範囲均等モード設定ステップS310において、探索範囲均等モードが選択され、当該探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索している。
【0085】
右折予測ステップS410において、右左折予測手段250は、車両が右折することを予測する。例えば、カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測できる。図14は、カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測する様子を示す図である。図14において、車両が、右左折予測手段250によって車両が左折すると予測された交差点に近づいている。
【0086】
第1距離算出ステップS330において、車両位置算出手段231は、車両と、当該車両が右折する交差点との距離である第1距離P1を算出する。図15は、第1距離P1を示す図である。図15に示すように、第1距離P1は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が右折すると予測される交差点の中心との距離である。
【0087】
第1距離判定ステップS340において、車両位置判定手段232は、第1距離算出ステップS330で算出された第1距離P1が第1閾値L1未満であるか否かを判定する。
【0088】
なお、第1閾値L1は、車両が右折すると予測されている交差点に近づく際、およびその後車両が右折する際、車両の左側における歩行者との衝突の危険性を考慮して設定される。具体的には、車両が右折する際には、仮に、車両の左側に歩行者が存在していたとしても、当該歩行者が車両の走行方向に侵入する可能性は低いため、車両の右側領域について集中的に歩行者を探索する。
【0089】
また、車両が右折する場合における第1閾値L1は、上述した車両が左折する場合における第1閾値L1と異なる値に設定されても構わない。
【0090】
探索範囲偏重モード設定ステップS350において、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択する。図16は、車両が右折すると予測されている交差点に近づいて、車両の右側に注視する様子を示す図である。図16において、車両が右折すると予測されている交差点に近づいた場合(第1距離P1<第1閾値L1)、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の右側領域において歩行者を探索するように設定する。
【0091】
道路状況を考慮すると、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、当該左側領域において歩行者を探索しない分、車両の右側領域において演算負荷を上げて歩行者を探索する。
【0092】
なお、ここでは、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、車両の右側領域のみにおいて歩行者を探索するように設定しているが、これに限定されるものではない。例えば、車両の右側における歩行者に注視すべき範囲を、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像のうちの右側半分領域でなく、当該画像全体領域のうち右側3分の1領域、または当該画像全体領域のうち右側3分の2領域等に設定しても構わない。また、歩行者に注視すべき範囲でない車両の左側領域において、演算負荷を下げて歩行者を探索しても構わない。
【0093】
そして、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索する。
【0094】
次に、上述したように、車両が左折する場合は、第2距離算出ステップS360で第2距離P2を算出し、第2距離判定ステップS370で第2距離P2と第2閾値L2とを比較し、車両の左折状態が進んでいるか否かを監視することによって、探索範囲モードを探索範囲均等モードに戻すタイミングを図っていた。
【0095】
一方、車両が右折する場合は、交差点相対位置算出ステップS420で車両と交差点との相対位置を算出し、交差点通過判定ステップS430で車両が交差点を通過したか否かを監視することによって、探索範囲モードを探索範囲均等モードに戻すタイミングを図る。
【0096】
交差点相対位置算出ステップS420において、車両位置算出手段231は、探索範囲偏重モードを探索範囲モードとして設定した後に、車両と、当該車両が右折する交差点との相対位置を算出する。なお、当該相対位置は、GPS情報および地図情報に基づいて算出される。
【0097】
交差点通過判定ステップS430において、車両位置判定手段232は、交差点相対位置算出ステップS420で算出された相対位置に基づいて、車両が交差点を通過したか否かを判定する。
【0098】
交差点通過判定ステップS430で車両が交差点を通過していないと判定された場合、交差点相対位置算出ステップS420に戻る(交差点通過判定ステップS430のNo)。図17は、車両が交差点を通過していない様子を示す図である。図17において、車両と、当該車両が右折する交差点との相対位置に基づいて、車両は交差点を通過していないと判定されている。この場合、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、車両の右側領域のみにおいて歩行者を探索する探索範囲偏重モードが選択されたままである。
【0099】
一方、交差点通過判定ステップS430で車両が交差点を通過したと判定された場合、探索範囲均等モード設定ステップS380に進む(交差点通過判定ステップS430のYes)。
【0100】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、交差点相対位置算出ステップS420および交差点通過判定ステップS430を繰り返し、車両の右折状態が進んでいるか否かを監視している。
【0101】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。図18は、車両が右折すると予測されている交差点において、車両の右折状態が進んで、車両の左側および右側に注視する様子を示す図である。図18において、車両が右折すると予測されている交差点において、車両の右折状態が進んだ場合(車両が交差点を通過した場合)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。
【0102】
なお、ここでは、車両が交差点を通過した場合、車両の右折状態が進んでいると判定しているが、これに限定されるものではなく、車両の右折状態が進んでいるか否かを判定可能であれば、その他の方法であっても構わない。
【0103】
また、車両が交差点を通過していない場合であっても、車両と、当該車両が右折する交差点との相対位置に応じて、徐々に、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とを変化させても構わない。
【0104】
上述したように、歩行者検知装置100は、車両が右折する場合、車両と交差点との距離に応じて、歩行者を探索する領域を切り替える。これにより、交差点における車両走行の状況に応じて、歩行者に注視すべき範囲と探索処理における演算量とを考慮して、適切に歩行者を検知する。
【0105】
以上のように、本発明の第1の実施形態に係る歩行者検知装置100によれば、車両が交差点を右折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の右側領域について演算負荷を上げて歩行者を探索し、その後、車両の右折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を右折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0106】
<第2の実施形態>
図19は、本発明の第2の実施形態に係る歩行者検知装置500を示す図である。図19において、歩行者検知装置500は、図1に示した本発明の第1の実施形態に係る歩行者検知装置100にボディー制御ECU510が追加されている点で異なる。
【0107】
図20は、本発明の第2の実施形態に係る歩行者検知装置500を機能的に示すブロック図である。図20において、歩行者検知装置500は、図2に示した本発明の第1の実施形態に係る歩行者検知装置100にウィンカー制御手段610が追加されている点で異なる。
【0108】
図19および図20に示す歩行者検知装置500において、図1および図2に示した本発明の第1の実施形態に係る歩行者検知装置100と同一の構成については、同一の参照符号を付して、詳細な説明は省略する。本実施形態では、本発明の第1の実施形態と異なる点について、詳しく説明する。
【0109】
図19に示した歩行者検知装置500のボディー制御ECU510は、車両が右折または左折する場合におけるウィンカー等を制御する。そして、探索範囲制御ECU130は、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に加えて、ボディー制御ECU510からのウィンカー情報に基づいて、歩行者を探索する探索範囲を制御する。
【0110】
図20に示した歩行者検知装置500のウィンカー制御手段610は、車両が右折または左折する場合におけるウィンカーを制御する。具体的には、車両が右折または左折する場合、運転者の操作に基づいてウィンカーを点滅させ、その後、車両の右折または左折状態が進んだ場合には、当該ウィンカーの点滅をキャンセルする。
【0111】
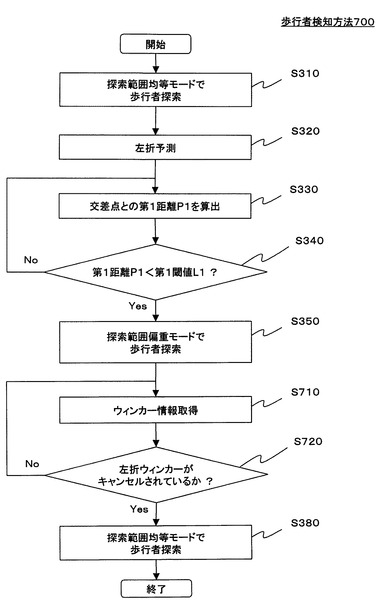
図21は、本発明の第2の実施形態に係る歩行者検知装置500が実行する歩行者検知方法(左折)700を示すフローチャートである。図21において、歩行者検知方法(左折)700は、探索範囲均等モード設定ステップS310と、左折予測ステップS320と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、ウィンカー情報取得ステップS710と、ウィンカーキャンセル判定ステップS720と、探索範囲均等モード設定ステップS380とを含む。図21に示した同一のステップ(処理)については、同一の参照符号を付し、詳細な説明は省略する。
【0112】
本実施形態に係る歩行者検知方法(左折)700は、本発明の第1の実施形態に係る歩行者検知方法(左折)300に比べて、車両の左折状態が進んでいるか否かを監視および判定する処理が異なる。
【0113】
歩行者検知方法(左折)700は、探索範囲均等モード設定ステップS310から探索範囲偏重モード設定ステップS350までの処理は、本発明の第1の実施形態に係る歩行者検知方法(左折)300と同様であって、ここでは、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索しているものとする。
【0114】
次に、ウィンカー情報取得ステップS710において、ウィンカー制御手段610は、車両が左折する場合におけるウィンカー情報を取得する。具体的には、左折ウィンカーが点滅しているか否かを示す情報を取得する。
【0115】
ウィンカーキャンセル判定ステップS720において、ウィンカー制御手段610は、ウィンカー情報取得ステップS710で取得されたウィンカー情報に基づいて、左折ウィンカーがキャンセルされているか否かを判定する。
【0116】
ウィンカーキャンセル判定ステップS720で左折ウィンカーがキャンセルされていると判定された場合、探索範囲均等モード設定ステップS380に進む(ウィンカーキャンセル判定ステップS720のYes)。
【0117】
一方、ウィンカーキャンセル判定ステップS720で左折ウィンカーがキャンセルされていない判定された場合、ウィンカー情報取得ステップS710に戻る(ウィンカーキャンセル判定ステップS720のNo)。
【0118】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、ウィンカー情報取得ステップS710およびウィンカーキャンセル判定ステップS720を繰り返し、車両の左折状態が進んでいるか否かを監視している。
【0119】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。車両が左折すると予測されている交差点において、車両の左折状態が進んだ場合(左折ウィンカーがキャンセルされた場合)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。換言すれば、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像領域内のうちの左側領域において高負荷で探索処理を行っていた状態から、当該車両の前方周辺画像領域内全体を一定負荷で探索処理を行う状態に切り替える。
【0120】
以上のように、本発明の第2の実施形態に係る歩行者検知装置500によれば、車両が交差点を左折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の左側領域について演算負荷を上げて歩行者を探索し、その後、車両の左折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を左折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0121】
なお、本実施形態では、車両が左折する場合におけるウィンカー情報に基づいて、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えていた。車両が右折する場合においても右折ウィンカー情報に基づいて、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えることによって、同様の効果が得られることは言うまでもない。
【0122】
さらに、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えるタイミングは、ウィンカー情報に限定されるものではなく、例えば、ステアリングセンサ等によって車両の操舵角を検出し、当該車両の操舵角情報に基づいて、判定されても構わない。換言すれば、当該操舵角に基づいて、車両の右折または左折状態が進んでいるか否かを判定する。
【産業上の利用可能性】
【0123】
本発明は、歩行者を検知するための演算量を低減しつつ、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知する歩行者検知装置等に有用である。
【符号の説明】
【0124】
100、500 歩行者検知装置
110 歩行者検知カメラ
120 歩行者検知判断ECU
130 探索範囲制御ECU
140 表示用ディスプレイ制御ECU
150 表示用ディスプレイ
160 カーナビゲーションECU
210 画像取得手段
220 歩行者探索手段
230 探索範囲モード設定手段
231 車両位置算出手段
232 車両位置判定手段
233 探索範囲モード選択手段
240 結果通知手段
250 右左折予測手段
260 記録手段
300、700 歩行者検知方法(左折)
400 歩行者検知方法(右折)
510 ボディー制御ECU
610 ウィンカー制御手段
S310 探索範囲均等モード設定ステップ
S320 左折予測ステップ
S330 第1距離算出ステップ
S340 第1距離判定ステップ
S350 探索範囲偏重モード設定ステップ
S360 第2距離算出ステップ
S370 第2距離判定ステップ
S380 探索範囲均等モード設定ステップ
S410 右折予測ステップ
S420 交差点相対位置算出ステップ
S430 交差点通過判定ステップ
S710 ウィンカー情報取得ステップ
S720 ウィンカーキャンセル判定ステップ
【技術分野】
【0001】
本発明は、車両に搭載される歩行者検知装置に関し、より特定的には、最適な歩行者探索領域を設定しながら歩行者を検知する歩行者検知装置に関する。
【背景技術】
【0002】
従来、車両に搭載される歩行者検知装置は、カメラによって取得した画像から、車両の前方等に存在する歩行者を検知する。そして、車両と、検知した歩行者とが衝突する危険性があれば、当該衝突を回避するように運転者に警告したり、車両の走行速度を制御したりするプリクラッシュセーフティシステムが開発されている。
【0003】
さらに、通常、カメラ等によって取得可能な画像領域全体において障害物を検知するが、特許文献1に開示されている障害物検知装置は、車両と障害物との衝突の可能性が高いと予想される場所において、道路状況に対応した障害物検知領域を設定している。
【0004】
具体的には、特許文献1に開示されている障害物検知装置は、カーナビゲーション装置に記録されている地図情報、およびカメラによって取得された画像情報に基づいて、障害物検知領域を設定し、さらには、車両走行中に運転者のハンドル操作(ステア角)、および車速等に応じて、車両の予測進路に応じた障害物検知領域を設定している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−271766号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されている障害物検知装置では、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を特別考慮して障害物検知領域を設定していないため、当該歩行者を精度よく検知することができない。
【0007】
それ故に、本発明の目的は、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる歩行者検知装置を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の歩行者検知装置は、車両に搭載される歩行者検知装置であって、車両周辺の画像を取得する画像取得手段と、車両が右折または左折することを予測する右左折予測手段と、画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測手段による予測情報に基づいて設定する探索範囲モード設定手段と、探索範囲モード設定手段によって設定された探索範囲モードに基づいて、画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、歩行者探索手段によって探索された結果を通知する結果通知手段とを備え、探索範囲モード設定手段は、車両と、車両が右折または左折する交差点との距離に基づいて、探索範囲モードを設定することを特徴とする。
かかる構成により、画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測手段による予測情報に基づいて設定するため、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。
【0009】
好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、少なくとも1つを高い精度で探索する特定領域を設定することを特徴とする。
かかる構成により、分割された複数の探索領域のうち、少なくとも1つを高い精度で探索するため、高効率に歩行者を検知することができる。
【0010】
好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、特定領域以外の領域を低い精度で探索することを特徴とする。
かかる構成により、高い精度で探索する特定領域と、低い精度で探索する特定領域以外の領域とが設定されるため、車両と衝突の危険性が高い領域において歩行者を重点的に探索することができる。
【0011】
好ましい探索範囲モード設定手段は、車両が、右左折予測手段によって車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、探索範囲偏重モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、探索範囲偏重モードを探索範囲モードとして設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。
【0012】
さらに好ましい探索範囲モード設定手段は、右左折予測手段によって車両が右折または左折すると予測された交差点を、車両の右折または左折開始後予め設定された第2タイミングで、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両の右折または左折開始後予め設定された第2タイミングで、探索範囲均等モードを探索範囲モードとして設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく広範囲において検知することができる。
【0013】
また、さらに好ましい探索範囲モード設定手段は、車両と、右左折予測手段によって車両が右折または左折すると予測された交差点との距離を算出する車両位置算出手段と、車両位置算出手段によって算出された距離が予め設定された閾値未満であるか否かを判定する車両位置判定手段と、車両位置判定手段によって距離が閾値未満であると判定された場合、探索範囲偏重モードを探索範囲モードとして選択し、車両位置判定手段によって距離が閾値以上であると判定された場合、探索範囲均等モードを探索範囲モードとして選択する探索範囲モード選択手段とを含むことを特徴とする。
かかる構成により、車両と、当該車両が右折または左折すると予測された交差点との距離に基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、交差点における車両走行の状況に応じて、歩行者を精度よく検知することができる。
【0014】
さらに好ましくは、右左折予測手段によって車両が左折すると予測された交差点を車両の左折開始後において、車両位置判定手段は、車両位置算出手段によって算出された距離が車両の左折後における走行車線幅未満であるか否かを判定し、探索範囲モード選択手段は、車両位置判定手段によって距離が走行車線幅未満であると判定された場合、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両と、当該車両が左折すると予測された交差点との距離に基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の左折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0015】
さらに好ましくは、右左折予測手段によって車両が右折すると予測された交差点を車両の右折開始後において、車両位置判定手段は、車両が交差点を通過したか否かを判定し、探索範囲モード選択手段は、車両位置判定手段によって車両が交差点を通過したと判定された場合、探索範囲均等モードを探索範囲モードとして設定することを特徴とする。
かかる構成により、車両が交差点を通過したか否かに基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の右折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0016】
また、好ましくは、車両の右折または左折を示すウィンカーを制御するウィンカー制御手段を、さらに備え、第2タイミングは、ウィンカー制御手段によって車両の右折または左折が示されているウィンカーがキャンセルされるタイミングであることを特徴とする。
かかる構成により、ウィンカーのキャンセルに基づいて、探索範囲偏重モードと探索範囲均等モードとのいずれかの探索範囲モードを選択するため、当該車両の右折または左折状態に応じて、歩行者を精度よく広範囲において検知することができる。
【0017】
また、好ましくは、右左折予測手段によって車両が左折すると予測された場合、画像領域内のうちの左側領域は、画像領域内のうちの右側領域より高い精度で探索され、右左折予測手段によって車両が右折すると予測された場合、画像領域内のうちの右側領域は、画像領域内のうちの左側領域より高い精度で探索されることを特徴とする。
かかる構成により、車両が左折または右折する予測に基づいて、画像領域内のうち、高精度で探索する領域を設定するため、当該車両と衝突の危険性が高い歩行者を精度よく検知することができる。
【0018】
また、好ましい探索範囲偏重モードは、分割された複数の探索領域のうち、特定領域を高い精度で探索し、特定領域以外の領域を探索しないことを特徴とする。
かかる構成により、車両と衝突の危険性が高い歩行者を集中的に探索することができる。
【0019】
好ましくは、高い精度は、高負荷であること、および/または高精細であることを特徴とする。
かかる構成により、より正確に歩行者を検知することができる。
【0020】
上記目的を達成するために、本発明の歩行者検知方法は、車両に搭載される歩行者検知装置が実行する歩行者検知方法であって、車両周辺の画像を取得する画像取得ステップと、車両が右折または左折することを予測する右左折予測ステップと、車両と、右左折予測ステップで車両が右折または左折すると予測された交差点との距離を算出する車両位置算出ステップと、画像取得ステップで取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像取得ステップで取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、車両位置算出ステップで算出された車両と交差点との距離に基づいて設定する探索範囲モード設定ステップと、探索範囲モード設定ステップで設定された探索範囲モードに基づいて、画像取得ステップで取得された画像から歩行者を探索する歩行者探索ステップと、歩行者探索ステップによって探索された結果を通知する結果通知ステップとを含む。
【0021】
また、上記目的を達成するために、上述した本発明の歩行者検知装置の各構成が行うそれぞれの処理は、一連の処理手順を与える歩行者検知方法として捉えることができる。この方法は、一連の処理手順をコンピュータに実行させるためのプログラムの形式で提供される。このプログラムは、コンピュータ読み取り可能な記録媒体に記録された形態で、コンピュータに導入されてもよい。
【発明の効果】
【0022】
上述のように、本発明の歩行者検知装置によれば、車両が右折または左折する場合、当該車両が右折または左折することを予測し、当該予測に基づいて歩行者を探索する歩行者探索領域を設定するため、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる。さらに、車両の右折または左折状態に応じて、歩行者を探索する歩行者探索領域を広範囲にするため、当該車両が右折または左折する際、および右折または左折した直後において、歩行者を精度よく広範囲において検知することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施形態に係る歩行者検知装置100を示す図
【図2】本発明の第1の実施形態に係る歩行者検知装置100を機能的に示すブロック図
【図3】本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(左折)300を示すフローチャート
【図4】車両に搭載されたカメラが当該車両の前方周辺を撮像する様子を示す図
【図5】図4に示したように車両に搭載されたカメラによって撮像された当該車両の前方周辺画像を示す図
【図6】カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測する様子を示す図
【図7】第1距離P1を示す図
【図8】GPS情報および地図情報に基づいて第1距離P1を算出する方法を示す図
【図9】車両が左折すると予測されている交差点に近づいて、車両の左側に注視する様子を示す図
【図10】車両が左折すると予測されている交差点において、車両の左折状態が進んで、車両の左側および右側に注視する様子を示す図
【図11】車両の左側領域と車両の右側領域とにおける演算負荷比率を示す図
【図12】車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる様子を示す図
【図13】本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(右折)400を示すフローチャート
【図14】カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測する様子を示す図
【図15】第1距離P1を示す図
【図16】車両が右折すると予測されている交差点に近づいて、車両の右側に注視する様子を示す図
【図17】車両が交差点を通過していない様子を示す図
【図18】車両が右折すると予測されている交差点において、車両の右折状態が進んで、車両の左側および右側に注視する様子を示す図
【図19】本発明の第2の実施形態に係る歩行者検知装置500を示す図
【図20】本発明の第2の実施形態に係る歩行者検知装置500を機能的に示すブロック図
【図21】本発明の第2の実施形態に係る歩行者検知装置500が実行する歩行者検知方法(左折)700を示すフローチャート
【発明を実施するための形態】
【0024】
以下、本発明の各実施形態について、図面を参照しながら説明する。
<第1の実施形態>
図1は、本発明の第1の実施形態に係る歩行者検知装置100を示す図である。図1において、歩行者検知装置100は、歩行者検知カメラ110と、歩行者検知判断ECU(Electronic Control Unit)120と、探索範囲制御ECU130と、表示用ディスプレイ制御ECU140と、表示用ディスプレイ150と、カーナビゲーションECU160とを備える。
【0025】
図1において、歩行者検知カメラ110は、例えば、車両の前方部に搭載されており、主として、当該車両の前方に存在する歩行者を検知するための画像を撮像する。具体的には、歩行者検知カメラ110には赤外線カメラが用いられる。
【0026】
歩行者検知判断ECU120は、歩行者検知カメラ110によって撮像された画像(撮像情報)から歩行者を探索し、歩行者が存在するか否かを判断する。なお、歩行者検知判断ECU120は、探索範囲制御ECU130からの探索範囲情報に基づいて、歩行者の存在に注意すべき領域について、歩行者を探索する。
【0027】
探索範囲制御ECU130は、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に基づいて、歩行者の存在に注意すべき領域を判断し、歩行者を探索する探索範囲を制御する。なお、歩行者の存在に注意すべき領域、および探索範囲は、カーナビゲーションECU160からの走行中道路情報、および走行予定経路情報に基づいて制御される。当該制御方法についての詳細な説明は後述する。
【0028】
表示用ディスプレイ制御ECU140は、歩行者検知判断ECU120からのディスプレイ表示情報、および歩行者検知情報に基づいて、表示用ディスプレイ150に表示する画面を制御する。例えば、表示用ディスプレイ制御ECU140は、歩行者検知カメラ110によって撮像された画像を表示用ディスプレイ150に表示させ、当該画像領域内において検知した歩行者を強調して表示させてもよい。なお、表示用ディスプレイ制御ECU140と、歩行者検知判断ECU120とは、例えば、デジタル信号線を介して通信する。さらに、当該画像領域内において歩行者を検知した場合、当該検知した歩行者を表示用ディスプレイに表示させるだけでなく、例えば、警告音を鳴らすことによって運転者に通知してもよい。
【0029】
表示用ディスプレイ150は、表示用ディスプレイ制御ECU140からの画面情報に基づいて、画面表示する。
【0030】
カーナビゲーションECU160は、GPS(Global Positioning System)情報、およびメモリ等に記録されている地図情報に基づいて、車両が現在走行している道路の情報(走行中道路情報)、および現在地から目的地までの経路情報(走行予定経路情報)を探索範囲制御ECU130に通知する。なお、カーナビゲーションECU160と探索範囲制御ECU130とは、例えば、CAN(Controller Area Network)通信線を介して通信する。
【0031】
図2は、本発明の第1の実施形態に係る歩行者検知装置100を機能的に示すブロック図である。図2において、歩行者検知装置100は、画像取得手段210と、歩行者探索手段220と、探索範囲モード設定手段230と、結果通知手段240と、右左折予測手段250と、記録手段260とを備える。
【0032】
画像取得手段210は、歩行者検知カメラ110によって車両周辺を撮像し、当該車両周辺の画像を取得する。
【0033】
歩行者探索手段220は、歩行者検知判断ECU120を用いて、画像取得手段210によって取得された画像から歩行者を探索する。なお、歩行者探索手段220は、画像取得手段210によって取得された画像領域内を一定の演算負荷で探索したり、当該画像領域内のうちの特定領域を集中的に探索したりする。
【0034】
探索範囲モード設定手段230は、探索範囲制御ECU130を用いて、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に基づいて、歩行者の存在に注意すべき領域を判断し、画像取得手段210によって取得される画像から歩行者を探索する探索範囲モードを設定する。
【0035】
より詳細には、探索範囲モード設定手段230は、車両位置算出手段231と、車両位置判定手段232と、探索範囲モード選択手段233とを含む。
【0036】
車両位置算出手段231は、車両と、当該車両が右折または左折する交差点との距離を算出する。具体的には、車両位置算出手段231は、カーナビゲーションECU160を用いて、カーナビゲーションシステムにおけるGPS情報、および地図情報に基づいて、車両の位置を取得し、当該交差点との距離を算出する。
【0037】
車両位置判定手段232は、車両位置算出手段231によって算出された車両と交差点との距離が予め設定された閾値未満であるか否かを判定する。換言すれば、車両位置判定手段232は、車両が交差点に近づいているか否かを判定する。さらに、車両位置判定手段232は、車両が当該交差点を右折または左折したか(右折または左折状態が進んでいるか)否かを判定する。
【0038】
探索範囲モード選択手段233は、車両位置判定手段232によって車両が交差点に近づいていると判定された場合、探索範囲偏重モードを探索範囲モードとして選択する。そして、探索範囲モード選択手段233は、車両位置判定手段232によって車両が交差点を右折または左折した(右折または左折状態が進んでいる)と判定された場合、探索範囲均等モードを探索範囲モードとして選択する。ここで、探索範囲均等モードとは、画像領域内を予め設定された一定の演算負荷で探索し、探索範囲偏重モードとは、画像領域内のうち、高い演算負荷で探索する第1探索領域と低い演算負荷で探索する第2探索領域とを設定することをいう。
【0039】
なお、上述した歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲モードに基づく探索範囲および演算負荷で、画像取得手段210によって取得された画像から歩行者を探索する。探索範囲モードに対応する探索範囲および演算負荷について、詳細は後述する。
【0040】
結果通知手段240は、歩行者探索手段220によって探索された結果を通知する。具体的には、結果通知手段240は、検知した歩行者を表示用ディスプレイ150に表示してもよいし、さらに、車両と検知した歩行者とが衝突する危険性があれば、当該衝突を回避するように運転者に警告してもよい。
【0041】
右左折予測手段250は、典型的には、カーナビゲーションシステムであって、GPS情報、および地図情報に基づいて、目的地までの走行予定経路を求め、当該走行予定経路から車両が右折または左折することを予測する。
【0042】
記録手段260は、典型的にはメモリ等であって、記録手段260には、カーナビゲーションシステムにおける地図情報、および上述した探索範囲モードの具体的な設定内容等が記録されている。
【0043】
次に、本発明の第1の実施形態に係る歩行者検知装置100が実行する処理の流れについて説明する。
【0044】
図3は、本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(左折)300を示すフローチャートである。図3において、歩行者検知方法(左折)300は、探索範囲均等モード設定ステップS310と、左折予測ステップS320と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、第2距離算出ステップS360と、第2距離判定ステップS370と、探索範囲均等モード設定ステップS380とを含む。
【0045】
通常、車両に搭載される歩行者検知装置は、カメラ等によって取得可能な画像領域全体において、一定の演算負荷で歩行者を探索する。さらに、ここでは、車両に搭載されているカーナビゲーションシステムによって、目的地までのルート案内が実施されていることを前提とする。
【0046】
先ず、探索範囲均等モード設定ステップS310において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。同時に、画像取得手段210は、車両の前方周辺を撮像し、当該車両の前方周辺画像を取得している。図4は、車両に搭載されたカメラが当該車両の前方周辺を撮像する様子を示す図である。図4において、画像取得手段210は、カメラによって取得可能な領域全体を撮像している。図5は、図4に示したように車両に搭載されたカメラによって撮像された当該車両の前方周辺画像を示す図である。歩行者探索手段220は、探索範囲モード設定手段230によって選択された探索範囲均等モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索し、図5に示すように、車両の前方周辺画像から歩行者を検知する。
【0047】
このように、通常、車両に搭載される歩行者検知装置100は、車両に搭載されたカメラによって撮像し、取得された当該車両の前方周辺画像領域内を一定の演算負荷で歩行者を探索している。
【0048】
次に、左折予測ステップS320において、右左折予測手段250は、車両が左折することを予測する。例えば、カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測できる。図6は、カーナビゲーションシステムにおけるルート案内によって、車両が左折することを予測する様子を示す図である。図6において、車両が、右左折予測手段250によって車両が左折すると予測された交差点に近づいている。
【0049】
第1距離算出ステップS330において、車両位置算出手段231は、車両と、当該車両が左折する交差点との距離である第1距離P1を算出する。図7は、第1距離P1を示す図である。図7に示すように、第1距離P1は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が左折すると予測される交差点の中心との距離である。
【0050】
具体的に、第1距離P1は、GPS情報および地図情報に基づいて算出される。図8は、GPS情報および地図情報に基づいて第1距離P1を算出する方法を示す図である。図8において、地図情報とは、ノードとリンクとによって構成されている。図8に示すように、ノードaとノードbとのリンク長A、ノードbとノードcとのリンク長B、ノードcとノードdとのリンク長C、およびノードdとノードeとのリンク長Eとする。さらに、ノードaとノードbとの間であって、ノードaから距離Xの位置に車両が存在する場合、当該車両から交差点の中心ノードeまでの第1距離P1は、以下の(数1)によって算出される。
P1=(A−X)+B+C+D ・・・(数1)
なお、ノードaから距離Xについては、車両がノードaを通過してからの経過時間、および車両のノードa通過後における平均速度に基づいて算出し推定しても構わない。
【0051】
第1距離判定ステップS340において、車両位置判定手段232は、第1距離算出ステップS330で算出された第1距離P1が第1閾値L1未満であるか否かを判定する。ここで、第1閾値L1は、予め設定された距離であって、換言すれば、車両位置判定手段232は、第1距離P1に基づいて、車両が交差点に近づいているか否かを判定する。
【0052】
第1距離判定ステップS340で第1距離P1が第1閾値L1未満であると判定された場合、探索範囲偏重モード設定ステップS350に進む(第1距離判定ステップS340のYes)。
【0053】
一方、第1距離判定ステップS340で第1距離P1が第1閾値L1以上であると判定された場合、第1距離算出ステップS330に戻る(第1距離判定ステップS340のNo)。
【0054】
換言すれば、所定の時間間隔で、第1距離算出ステップS330および第1距離判定ステップS340を繰り返し、車両が交差点に近づいているか否かを監視している。
【0055】
なお、第1閾値L1は、車両が左折すると予測されている交差点に近づく際、およびその後車両が左折する際、車両の左側における歩行者に注視すべき範囲を考慮して設定される。具体的には、車両が左折する際に、車両の左側における歩行者を巻き込む危険性があるため、車両が左折する前から予め注視することによって、適切に歩行者を検知する。また、車両が左折した直後の横断歩道を横断する歩行者について、車両が左折する前から予め注視して適切に歩行者を検知する。
【0056】
また、第1閾値L1は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、車両の速度に応じて車両が交差点に侵入するタイミングが変動するため、第1閾値L1は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0057】
探索範囲偏重モード設定ステップS350において、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択する。図9は、車両が左折すると予測されている交差点に近づいて、車両の左側に注視する様子を示す図である。図9において、車両が左折すると予測されている交差点に近づいた場合(第1距離P1<第1閾値L1)、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の左側領域において歩行者を探索するように設定する。
【0058】
道路状況を考慮すると、車両の右側領域には歩行者が存在する可能性は低いため、当該右側領域において歩行者を探索せず、当該右側領域において歩行者を探索しない分、車両の左側領域において演算負荷を上げて歩行者を探索する。具体的には、図5に示した車両に搭載されたカメラによって撮像された当該車両の前方周辺画像において、当該画像領域内のうちの右側領域において探索処理をせず、当該画像領域内のうちの左側領域において高精度に探索処理を行うように設定する。
【0059】
なお、ここでは、車両の右側領域には歩行者が存在する可能性は低いため、当該右側領域において歩行者を探索せず、車両の左側領域のみにおいて歩行者を探索するように設定しているが、これに限定されるものではない。例えば、車両の左側における歩行者に注視すべき範囲を、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像のうちの左側半分領域でなく、当該画像全体領域のうち左側3分の1領域、または当該画像全体領域のうち左側3分の2領域等に設定しても構わない。また、歩行者に注視すべき範囲でない車両の右側領域において、演算負荷を下げて歩行者を探索しても構わない。
【0060】
さらに、探索範囲偏重モードの詳細な設定内容は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、探索範囲偏重モードの詳細な設定内容は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0061】
そして、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索する。
【0062】
第2距離算出ステップS360において、車両位置算出手段231は、探索範囲偏重モードを探索範囲モードとして設定した後に、車両と、当該車両が左折する交差点との距離である第2距離P2を算出する。第2距離P2は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が左折すると予測される交差点の中心との距離である。なお、第2距離P2は、GPS情報および地図情報に基づいて算出され、具体的な算出方法については、上述した第1距離P1の算出方法と同様であるため、詳細な説明は省略する。
【0063】
第2距離判定ステップS370において、車両位置判定手段232は、第2距離算出ステップS360で算出された第2距離P2が第2閾値L2未満であるか否かを判定する。
【0064】
第2距離判定ステップS370で第2距離P2が第2閾値L2未満であると判定された場合、探索範囲均等モード設定ステップS380に進む(第2距離判定ステップS370のYes)。
【0065】
一方、第2距離判定ステップS370で第2距離P2が第2閾値L2以上であると判定された場合、第2距離算出ステップS360に戻る(第2距離判定ステップS370のNo)。
【0066】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、第2距離算出ステップS360および第2距離判定ステップS370を繰り返し、車両の左折状態が進んでいるか否かを監視している。
【0067】
なお、第2閾値L2は、車両が左折すると予測されている交差点を左折する際、車両が左折した直後の横断歩道を横断する歩行者に注視すべき範囲を考慮して設定される。具体的には、車両が左折する際に、探索範囲偏重モード設定ステップS350で探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の左側領域において歩行者を探索するように設定されていたが、左折状態が進んだ場合、車両の右側領域においても歩行者を探索することが必要となる。
【0068】
また、第2閾値L2は、記録手段260に予め記録されているものとし、車両の走行車線幅、および車両の左折後における走行車線幅に基づく交差点毎に複数記録されていても構わない。さらに、車両の速度に応じて車両が交差点に侵入するタイミングおよび交差点を左折し、通過するタイミングが変動するため、第2閾値L2は、車両の速度および/または加速度に応じて複数記録されていても構わない。
【0069】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。図10は、車両が左折すると予測されている交差点において、車両の左折状態が進んで、車両の左側および右側に注視する様子を示す図である。図10において、車両が左折すると予測されている交差点において、車両の左折状態が進んだ場合(第2距離P2<第2閾値L2)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。換言すれば、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像領域内のうちの左側領域において高負荷で探索処理を行っていた状態から、当該車両の前方周辺画像領域内全体を一定負荷で探索処理を行う状態に切り替える。
【0070】
なお、ここでは、第2閾値L2は、車両の左折後における走行車線幅とし、第2距離P2が第2閾値L2未満となった場合、車両の左折状態が進んでいると判定している。第2閾値L2は、車両の左折後における走行車線幅に限定されるものではなく、車両の左折状態が進んでいるか否かを判定可能であれば、その他の値であってもよく、さらに、交差点毎、車両の速度および/または加速度に応じて設定しても構わない。
【0071】
上述したように、歩行者検知装置100は、車両が左折する場合、車両と交差点との距離に応じて、歩行者を探索する領域を切り替える。これにより、交差点における車両走行の状況に応じて、歩行者に注視すべき範囲と探索処理における演算量とを考慮して、適切に歩行者を検知する。
【0072】
図11は、車両の左側領域と車両の右側領域とにおける演算負荷比率を示す図である。図11(a)は、車両の左側領域における演算負荷比率を示す図であり、図11(b)は、車両の右側領域における演算負荷比率を示す図である。
【0073】
先ず、車両と当該車両が左折する交差点との第1距離P1が第1閾値以上の場合(車両が交差点に近づいていない場合)、探索範囲均等モードが探索範囲モードとして選択されている。つまり、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とは50[%]であって、均等である。
【0074】
次に、車両と当該車両が左折する交差点との第1距離P1が第1閾値未満の場合(車両が交差点に近づいている場合)、探索範囲偏重モードが探索範囲モードとして選択されている。つまり、車両の左側領域における演算負荷比率を50+ω[%]とし、車両の右側領域における演算負荷比率を50−ω[%]とする。歩行者に注視すべき範囲である車両の左側領域において、ω[%]分、演算負荷を上げ、歩行者が存在する可能性が低い車両の右側領域において、ω[%]分、演算負荷を下げている。これにより、状況に応じた高精度かつ高効率な歩行者探索処理を実現している。
【0075】
そして、車両と当該車両が左折する交差点との第2距離P2が第2閾値未満の場合(車両の左折状態が進んでいる場合)、探索範囲均等モードが探索範囲モードとして選択されている。
【0076】
なお、演算負荷比率の上昇下降範囲であるωは、0〜50[%]であって、探索範囲偏重モードにおいて車両の右側領域の探索処理をしない場合は、ωは、50[%]を設定すればよい。
【0077】
また、探索範囲偏重モードを選択している間、ωを可変とし、例えば、車両が交差点に近づくにつれて、車両の左側領域において演算負荷を徐々に上げ、車両の右側領域において演算負荷を徐々に下げる。
【0078】
図12は、車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる様子を示す図である。図12(a)は、車両の左側領域における演算負荷比率を示す図であり、図12(b)は、車両の右側領域における演算負荷比率を示す図である。
【0079】
車両と当該車両が左折する交差点との第1距離P1が第1閾値以上の場合(車両が交差点に近づいていない場合)、および車両と当該車両が左折する交差点との第2距離P2が第2閾値未満の場合(車両の左折状態が進んでいる場合)、探索範囲均等モードが探索範囲モードとして選択されている。この場合、図11と同様に、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とは50[%]であって、均等である。
【0080】
次に、車両と当該車両が左折する交差点との第1距離P1が第1閾値未満の場合(車両が交差点に近づいている場合)、探索範囲偏重モードが探索範囲モードとして選択され、車両の左側領域における演算負荷比率を50[%]から徐々に上げて、車両と当該車両が左折する交差点との第2距離P2が第2閾値未満となる場合(車両の左折状態が進んだ場合)、当該演算負荷比率を50+ω[%]としている。同時に、車両の右側領域における演算負荷比率は、50[%]から50−ω[%]まで徐々に下げている。
【0081】
なお、ここでは、車両の左側領域と車両の右側領域とにおける演算負荷比率を徐々に変化させる一例を示したが、これに限定されるものではない。例えば、演算負荷比率を関数(折れ線、曲線)に従って変化させてもよく、また、歩行者を探索する画像領域について、左右の2分割でなく3分割以上、または遠近を考慮して上下分割された領域毎に演算負荷比率を設定および変化させても構わない。
【0082】
以上のように、本発明の第1の実施形態に係る歩行者検知装置100によれば、車両が交差点を左折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の左側領域について演算負荷を上げて歩行者を探索し、その後、車両の左折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を左折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0083】
次に、車両が右折する場合について、説明する。
図13は、本発明の第1の実施形態に係る歩行者検知装置100が実行する歩行者検知方法(右折)400を示すフローチャートである。図13において、歩行者検知方法400(右折)は、探索範囲均等モード設定ステップS310と、右折予測ステップS410と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、交差点相対位置算出ステップS420と、交差点通過判定ステップS430と、探索範囲均等モード設定ステップS380とを含む。図13において、図3に示した同一のステップ(処理)については、同一の参照符号を付し、詳細な説明は省略する。
【0084】
先ず、探索範囲均等モード設定ステップS310において、探索範囲均等モードが選択され、当該探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索している。
【0085】
右折予測ステップS410において、右左折予測手段250は、車両が右折することを予測する。例えば、カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測できる。図14は、カーナビゲーションシステムにおけるルート案内によって、車両が右折することを予測する様子を示す図である。図14において、車両が、右左折予測手段250によって車両が左折すると予測された交差点に近づいている。
【0086】
第1距離算出ステップS330において、車両位置算出手段231は、車両と、当該車両が右折する交差点との距離である第1距離P1を算出する。図15は、第1距離P1を示す図である。図15に示すように、第1距離P1は、当該車両の走行車線方向に沿った距離であって、車両の中心点と、当該車両が右折すると予測される交差点の中心との距離である。
【0087】
第1距離判定ステップS340において、車両位置判定手段232は、第1距離算出ステップS330で算出された第1距離P1が第1閾値L1未満であるか否かを判定する。
【0088】
なお、第1閾値L1は、車両が右折すると予測されている交差点に近づく際、およびその後車両が右折する際、車両の左側における歩行者との衝突の危険性を考慮して設定される。具体的には、車両が右折する際には、仮に、車両の左側に歩行者が存在していたとしても、当該歩行者が車両の走行方向に侵入する可能性は低いため、車両の右側領域について集中的に歩行者を探索する。
【0089】
また、車両が右折する場合における第1閾値L1は、上述した車両が左折する場合における第1閾値L1と異なる値に設定されても構わない。
【0090】
探索範囲偏重モード設定ステップS350において、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択する。図16は、車両が右折すると予測されている交差点に近づいて、車両の右側に注視する様子を示す図である。図16において、車両が右折すると予測されている交差点に近づいた場合(第1距離P1<第1閾値L1)、探索範囲モード選択手段233は、探索範囲偏重モードを探索範囲モードとして選択し、集中的に、車両の右側領域において歩行者を探索するように設定する。
【0091】
道路状況を考慮すると、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、当該左側領域において歩行者を探索しない分、車両の右側領域において演算負荷を上げて歩行者を探索する。
【0092】
なお、ここでは、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、車両の右側領域のみにおいて歩行者を探索するように設定しているが、これに限定されるものではない。例えば、車両の右側における歩行者に注視すべき範囲を、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像のうちの右側半分領域でなく、当該画像全体領域のうち右側3分の1領域、または当該画像全体領域のうち右側3分の2領域等に設定しても構わない。また、歩行者に注視すべき範囲でない車両の左側領域において、演算負荷を下げて歩行者を探索しても構わない。
【0093】
そして、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索する。
【0094】
次に、上述したように、車両が左折する場合は、第2距離算出ステップS360で第2距離P2を算出し、第2距離判定ステップS370で第2距離P2と第2閾値L2とを比較し、車両の左折状態が進んでいるか否かを監視することによって、探索範囲モードを探索範囲均等モードに戻すタイミングを図っていた。
【0095】
一方、車両が右折する場合は、交差点相対位置算出ステップS420で車両と交差点との相対位置を算出し、交差点通過判定ステップS430で車両が交差点を通過したか否かを監視することによって、探索範囲モードを探索範囲均等モードに戻すタイミングを図る。
【0096】
交差点相対位置算出ステップS420において、車両位置算出手段231は、探索範囲偏重モードを探索範囲モードとして設定した後に、車両と、当該車両が右折する交差点との相対位置を算出する。なお、当該相対位置は、GPS情報および地図情報に基づいて算出される。
【0097】
交差点通過判定ステップS430において、車両位置判定手段232は、交差点相対位置算出ステップS420で算出された相対位置に基づいて、車両が交差点を通過したか否かを判定する。
【0098】
交差点通過判定ステップS430で車両が交差点を通過していないと判定された場合、交差点相対位置算出ステップS420に戻る(交差点通過判定ステップS430のNo)。図17は、車両が交差点を通過していない様子を示す図である。図17において、車両と、当該車両が右折する交差点との相対位置に基づいて、車両は交差点を通過していないと判定されている。この場合、車両の左側領域には歩行者が存在する可能性は低いため、当該左側領域において歩行者を探索せず、車両の右側領域のみにおいて歩行者を探索する探索範囲偏重モードが選択されたままである。
【0099】
一方、交差点通過判定ステップS430で車両が交差点を通過したと判定された場合、探索範囲均等モード設定ステップS380に進む(交差点通過判定ステップS430のYes)。
【0100】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、交差点相対位置算出ステップS420および交差点通過判定ステップS430を繰り返し、車両の右折状態が進んでいるか否かを監視している。
【0101】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。図18は、車両が右折すると予測されている交差点において、車両の右折状態が進んで、車両の左側および右側に注視する様子を示す図である。図18において、車両が右折すると予測されている交差点において、車両の右折状態が進んだ場合(車両が交差点を通過した場合)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。
【0102】
なお、ここでは、車両が交差点を通過した場合、車両の右折状態が進んでいると判定しているが、これに限定されるものではなく、車両の右折状態が進んでいるか否かを判定可能であれば、その他の方法であっても構わない。
【0103】
また、車両が交差点を通過していない場合であっても、車両と、当該車両が右折する交差点との相対位置に応じて、徐々に、車両の左側領域における演算負荷比率と、車両の右側領域における演算負荷比率とを変化させても構わない。
【0104】
上述したように、歩行者検知装置100は、車両が右折する場合、車両と交差点との距離に応じて、歩行者を探索する領域を切り替える。これにより、交差点における車両走行の状況に応じて、歩行者に注視すべき範囲と探索処理における演算量とを考慮して、適切に歩行者を検知する。
【0105】
以上のように、本発明の第1の実施形態に係る歩行者検知装置100によれば、車両が交差点を右折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の右側領域について演算負荷を上げて歩行者を探索し、その後、車両の右折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を右折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0106】
<第2の実施形態>
図19は、本発明の第2の実施形態に係る歩行者検知装置500を示す図である。図19において、歩行者検知装置500は、図1に示した本発明の第1の実施形態に係る歩行者検知装置100にボディー制御ECU510が追加されている点で異なる。
【0107】
図20は、本発明の第2の実施形態に係る歩行者検知装置500を機能的に示すブロック図である。図20において、歩行者検知装置500は、図2に示した本発明の第1の実施形態に係る歩行者検知装置100にウィンカー制御手段610が追加されている点で異なる。
【0108】
図19および図20に示す歩行者検知装置500において、図1および図2に示した本発明の第1の実施形態に係る歩行者検知装置100と同一の構成については、同一の参照符号を付して、詳細な説明は省略する。本実施形態では、本発明の第1の実施形態と異なる点について、詳しく説明する。
【0109】
図19に示した歩行者検知装置500のボディー制御ECU510は、車両が右折または左折する場合におけるウィンカー等を制御する。そして、探索範囲制御ECU130は、カーナビゲーションECU160からの走行中道路情報および走行予定経路情報に加えて、ボディー制御ECU510からのウィンカー情報に基づいて、歩行者を探索する探索範囲を制御する。
【0110】
図20に示した歩行者検知装置500のウィンカー制御手段610は、車両が右折または左折する場合におけるウィンカーを制御する。具体的には、車両が右折または左折する場合、運転者の操作に基づいてウィンカーを点滅させ、その後、車両の右折または左折状態が進んだ場合には、当該ウィンカーの点滅をキャンセルする。
【0111】
図21は、本発明の第2の実施形態に係る歩行者検知装置500が実行する歩行者検知方法(左折)700を示すフローチャートである。図21において、歩行者検知方法(左折)700は、探索範囲均等モード設定ステップS310と、左折予測ステップS320と、第1距離算出ステップS330と、第1距離判定ステップS340と、探索範囲偏重モード設定ステップS350と、ウィンカー情報取得ステップS710と、ウィンカーキャンセル判定ステップS720と、探索範囲均等モード設定ステップS380とを含む。図21に示した同一のステップ(処理)については、同一の参照符号を付し、詳細な説明は省略する。
【0112】
本実施形態に係る歩行者検知方法(左折)700は、本発明の第1の実施形態に係る歩行者検知方法(左折)300に比べて、車両の左折状態が進んでいるか否かを監視および判定する処理が異なる。
【0113】
歩行者検知方法(左折)700は、探索範囲均等モード設定ステップS310から探索範囲偏重モード設定ステップS350までの処理は、本発明の第1の実施形態に係る歩行者検知方法(左折)300と同様であって、ここでは、歩行者探索手段220は、探索範囲モード選択手段233によって選択された探索範囲偏重モードに基づいて、画像取得手段210によって取得された画像から歩行者を探索しているものとする。
【0114】
次に、ウィンカー情報取得ステップS710において、ウィンカー制御手段610は、車両が左折する場合におけるウィンカー情報を取得する。具体的には、左折ウィンカーが点滅しているか否かを示す情報を取得する。
【0115】
ウィンカーキャンセル判定ステップS720において、ウィンカー制御手段610は、ウィンカー情報取得ステップS710で取得されたウィンカー情報に基づいて、左折ウィンカーがキャンセルされているか否かを判定する。
【0116】
ウィンカーキャンセル判定ステップS720で左折ウィンカーがキャンセルされていると判定された場合、探索範囲均等モード設定ステップS380に進む(ウィンカーキャンセル判定ステップS720のYes)。
【0117】
一方、ウィンカーキャンセル判定ステップS720で左折ウィンカーがキャンセルされていない判定された場合、ウィンカー情報取得ステップS710に戻る(ウィンカーキャンセル判定ステップS720のNo)。
【0118】
換言すれば、探索範囲偏重モードを探索範囲モードとして設定した後、所定の時間間隔で、ウィンカー情報取得ステップS710およびウィンカーキャンセル判定ステップS720を繰り返し、車両の左折状態が進んでいるか否かを監視している。
【0119】
探索範囲均等モード設定ステップS380において、探索範囲モード設定手段230は、探索範囲均等モードを探索範囲モードとして選択する。車両が左折すると予測されている交差点において、車両の左折状態が進んだ場合(左折ウィンカーがキャンセルされた場合)、探索範囲モード選択手段233は、探索範囲均等モードを探索範囲モードとして選択する。換言すれば、車両に搭載されたカメラによって撮像された当該車両の前方周辺画像領域内のうちの左側領域において高負荷で探索処理を行っていた状態から、当該車両の前方周辺画像領域内全体を一定負荷で探索処理を行う状態に切り替える。
【0120】
以上のように、本発明の第2の実施形態に係る歩行者検知装置500によれば、車両が交差点を左折する際、当該車両が交差点に近づくと探索範囲偏重モードに基づいて、車両の左側領域について演算負荷を上げて歩行者を探索し、その後、車両の左折状態が進むと探索範囲均等モードに基づいて、車両の左側領域および右側領域について演算負荷を均等にして歩行者を探索する。これにより、車両が交差点を左折する状況に応じて、高精度かつ高効率な歩行者探索処理を実現することができる。
【0121】
なお、本実施形態では、車両が左折する場合におけるウィンカー情報に基づいて、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えていた。車両が右折する場合においても右折ウィンカー情報に基づいて、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えることによって、同様の効果が得られることは言うまでもない。
【0122】
さらに、探索範囲モードを探索範囲偏重モードから探索範囲均等モードに切り替えるタイミングは、ウィンカー情報に限定されるものではなく、例えば、ステアリングセンサ等によって車両の操舵角を検出し、当該車両の操舵角情報に基づいて、判定されても構わない。換言すれば、当該操舵角に基づいて、車両の右折または左折状態が進んでいるか否かを判定する。
【産業上の利用可能性】
【0123】
本発明は、歩行者を検知するための演算量を低減しつつ、車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知する歩行者検知装置等に有用である。
【符号の説明】
【0124】
100、500 歩行者検知装置
110 歩行者検知カメラ
120 歩行者検知判断ECU
130 探索範囲制御ECU
140 表示用ディスプレイ制御ECU
150 表示用ディスプレイ
160 カーナビゲーションECU
210 画像取得手段
220 歩行者探索手段
230 探索範囲モード設定手段
231 車両位置算出手段
232 車両位置判定手段
233 探索範囲モード選択手段
240 結果通知手段
250 右左折予測手段
260 記録手段
300、700 歩行者検知方法(左折)
400 歩行者検知方法(右折)
510 ボディー制御ECU
610 ウィンカー制御手段
S310 探索範囲均等モード設定ステップ
S320 左折予測ステップ
S330 第1距離算出ステップ
S340 第1距離判定ステップ
S350 探索範囲偏重モード設定ステップ
S360 第2距離算出ステップ
S370 第2距離判定ステップ
S380 探索範囲均等モード設定ステップ
S410 右折予測ステップ
S420 交差点相対位置算出ステップ
S430 交差点通過判定ステップ
S710 ウィンカー情報取得ステップ
S720 ウィンカーキャンセル判定ステップ
【特許請求の範囲】
【請求項1】
車両に搭載される歩行者検知装置であって、
前記車両周辺の画像を取得する画像取得手段と、
前記車両が右折または左折することを予測する右左折予測手段と、
前記画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、前記画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、前記右左折予測手段による予測情報に基づいて設定する探索範囲モード設定手段と、
前記探索範囲モード設定手段によって設定された探索範囲モードに基づいて、前記画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、
前記歩行者探索手段によって探索された結果を通知する結果通知手段とを備え、
前記探索範囲モード設定手段は、前記車両と、前記車両が右折または左折する交差点との距離に基づいて、前記探索範囲モードを設定することを特徴とする、歩行者検知装置。
【請求項2】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、少なくとも1つを高い精度で探索する特定領域を設定することを特徴とする、請求項1に記載の歩行者検知装置。
【請求項3】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、前記特定領域以外の領域を低い精度で探索することを特徴とする、請求項2に記載の歩行者検知装置。
【請求項4】
前記探索範囲モード設定手段は、
前記車両が、前記右左折予測手段によって前記車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、前記探索範囲偏重モードを探索範囲モードとして設定することを特徴とする、請求項1〜3のいずれかに記載の歩行者検知装置。
【請求項5】
前記探索範囲モード設定手段は、
前記右左折予測手段によって前記車両が右折または左折すると予測された交差点を、前記車両の右折または左折開始後予め設定された第2タイミングで、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項4に記載の歩行者検知装置。
【請求項6】
前記探索範囲モード設定手段は、
前記車両と、前記右左折予測手段によって前記車両が右折または左折すると予測された交差点との距離を算出する車両位置算出手段と、
前記車両位置算出手段によって算出された前記距離が予め設定された閾値未満であるか否かを判定する車両位置判定手段と、
前記車両位置判定手段によって前記距離が前記閾値未満であると判定された場合、前記探索範囲偏重モードを探索範囲モードとして選択し、前記車両位置判定手段によって前記距離が前記閾値以上であると判定された場合、前記探索範囲均等モードを探索範囲モードとして選択する探索範囲モード選択手段とを含むことを特徴とする、請求項4に記載の歩行者検知装置。
【請求項7】
前記右左折予測手段によって前記車両が左折すると予測された交差点を前記車両の左折開始後において、
前記車両位置判定手段は、前記車両位置算出手段によって算出された距離が前記車両の左折後における走行車線幅未満であるか否かを判定し、
前記探索範囲モード選択手段は、前記車両位置判定手段によって前記距離が前記走行車線幅未満であると判定された場合、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項6に記載の歩行者検知装置。
【請求項8】
前記右左折予測手段によって前記車両が右折すると予測された交差点を前記車両の右折開始後において、
前記車両位置判定手段は、前記車両が前記交差点を通過したか否かを判定し、
前記探索範囲モード選択手段は、前記車両位置判定手段によって前記車両が前記交差点を通過したと判定された場合、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項6〜7のいずれかに記載の歩行者検知装置。
【請求項9】
前記車両の右折または左折を示すウィンカーを制御するウィンカー制御手段を、さらに備え、
前記第2タイミングは、前記ウィンカー制御手段によって前記車両の右折または左折が示されているウィンカーがキャンセルされるタイミングであることを特徴とする、請求項5に記載の歩行者検知装置。
【請求項10】
前記右左折予測手段によって前記車両が左折すると予測された場合、前記画像領域内のうちの左側領域は、前記画像領域内のうちの右側領域より高い精度で探索され、
前記右左折予測手段によって前記車両が右折すると予測された場合、前記画像領域内のうちの右側領域は、前記画像領域内のうちの左側領域より高い精度で探索されることを特徴とする、請求項1〜9のいずれかに記載の歩行者検知装置。
【請求項11】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、前記特定領域を高い精度で探索し、前記特定領域以外の領域を探索しないことを特徴とする、請求項2に記載の歩行者検知装置。
【請求項12】
前記高い精度は、高負荷であること、および/または高精細であることを特徴とする、請求項1に記載の歩行者検知装置。
【請求項13】
車両に搭載される歩行者検知装置が実行する歩行者検知方法であって、
前記車両周辺の画像を取得する画像取得ステップと、
前記車両が右折または左折することを予測する右左折予測ステップと、
前記車両と、前記右左折予測ステップで前記車両が右折または左折すると予測された交差点との距離を算出する車両位置算出ステップと、
前記画像取得ステップで取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、前記画像取得ステップで取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、前記車両位置算出ステップで算出された前記車両と前記交差点との距離に基づいて設定する探索範囲モード設定ステップと、
前記探索範囲モード設定ステップで設定された探索範囲モードに基づいて、前記画像取得ステップで取得された画像から歩行者を探索する歩行者探索ステップと、
前記歩行者探索ステップによって探索された結果を通知する結果通知ステップとを含む、歩行者検知方法。
【請求項1】
車両に搭載される歩行者検知装置であって、
前記車両周辺の画像を取得する画像取得手段と、
前記車両が右折または左折することを予測する右左折予測手段と、
前記画像取得手段によって取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、前記画像取得手段によって取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、前記右左折予測手段による予測情報に基づいて設定する探索範囲モード設定手段と、
前記探索範囲モード設定手段によって設定された探索範囲モードに基づいて、前記画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、
前記歩行者探索手段によって探索された結果を通知する結果通知手段とを備え、
前記探索範囲モード設定手段は、前記車両と、前記車両が右折または左折する交差点との距離に基づいて、前記探索範囲モードを設定することを特徴とする、歩行者検知装置。
【請求項2】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、少なくとも1つを高い精度で探索する特定領域を設定することを特徴とする、請求項1に記載の歩行者検知装置。
【請求項3】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、前記特定領域以外の領域を低い精度で探索することを特徴とする、請求項2に記載の歩行者検知装置。
【請求項4】
前記探索範囲モード設定手段は、
前記車両が、前記右左折予測手段によって前記車両が右折または左折すると予測された交差点に近接する予め設定された第1タイミングで、前記探索範囲偏重モードを探索範囲モードとして設定することを特徴とする、請求項1〜3のいずれかに記載の歩行者検知装置。
【請求項5】
前記探索範囲モード設定手段は、
前記右左折予測手段によって前記車両が右折または左折すると予測された交差点を、前記車両の右折または左折開始後予め設定された第2タイミングで、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項4に記載の歩行者検知装置。
【請求項6】
前記探索範囲モード設定手段は、
前記車両と、前記右左折予測手段によって前記車両が右折または左折すると予測された交差点との距離を算出する車両位置算出手段と、
前記車両位置算出手段によって算出された前記距離が予め設定された閾値未満であるか否かを判定する車両位置判定手段と、
前記車両位置判定手段によって前記距離が前記閾値未満であると判定された場合、前記探索範囲偏重モードを探索範囲モードとして選択し、前記車両位置判定手段によって前記距離が前記閾値以上であると判定された場合、前記探索範囲均等モードを探索範囲モードとして選択する探索範囲モード選択手段とを含むことを特徴とする、請求項4に記載の歩行者検知装置。
【請求項7】
前記右左折予測手段によって前記車両が左折すると予測された交差点を前記車両の左折開始後において、
前記車両位置判定手段は、前記車両位置算出手段によって算出された距離が前記車両の左折後における走行車線幅未満であるか否かを判定し、
前記探索範囲モード選択手段は、前記車両位置判定手段によって前記距離が前記走行車線幅未満であると判定された場合、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項6に記載の歩行者検知装置。
【請求項8】
前記右左折予測手段によって前記車両が右折すると予測された交差点を前記車両の右折開始後において、
前記車両位置判定手段は、前記車両が前記交差点を通過したか否かを判定し、
前記探索範囲モード選択手段は、前記車両位置判定手段によって前記車両が前記交差点を通過したと判定された場合、前記探索範囲均等モードを探索範囲モードとして設定することを特徴とする、請求項6〜7のいずれかに記載の歩行者検知装置。
【請求項9】
前記車両の右折または左折を示すウィンカーを制御するウィンカー制御手段を、さらに備え、
前記第2タイミングは、前記ウィンカー制御手段によって前記車両の右折または左折が示されているウィンカーがキャンセルされるタイミングであることを特徴とする、請求項5に記載の歩行者検知装置。
【請求項10】
前記右左折予測手段によって前記車両が左折すると予測された場合、前記画像領域内のうちの左側領域は、前記画像領域内のうちの右側領域より高い精度で探索され、
前記右左折予測手段によって前記車両が右折すると予測された場合、前記画像領域内のうちの右側領域は、前記画像領域内のうちの左側領域より高い精度で探索されることを特徴とする、請求項1〜9のいずれかに記載の歩行者検知装置。
【請求項11】
前記探索範囲偏重モードは、前記分割された複数の探索領域のうち、前記特定領域を高い精度で探索し、前記特定領域以外の領域を探索しないことを特徴とする、請求項2に記載の歩行者検知装置。
【請求項12】
前記高い精度は、高負荷であること、および/または高精細であることを特徴とする、請求項1に記載の歩行者検知装置。
【請求項13】
車両に搭載される歩行者検知装置が実行する歩行者検知方法であって、
前記車両周辺の画像を取得する画像取得ステップと、
前記車両が右折または左折することを予測する右左折予測ステップと、
前記車両と、前記右左折予測ステップで前記車両が右折または左折すると予測された交差点との距離を算出する車両位置算出ステップと、
前記画像取得ステップで取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、前記画像取得ステップで取得される画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、前記車両位置算出ステップで算出された前記車両と前記交差点との距離に基づいて設定する探索範囲モード設定ステップと、
前記探索範囲モード設定ステップで設定された探索範囲モードに基づいて、前記画像取得ステップで取得された画像から歩行者を探索する歩行者探索ステップと、
前記歩行者探索ステップによって探索された結果を通知する結果通知ステップとを含む、歩行者検知方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】

【図19】

【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−14527(P2012−14527A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−151347(P2010−151347)
【出願日】平成22年7月1日(2010.7.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年7月1日(2010.7.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]