
歩行者状態分類装置およびプログラム
【構成】 歩行者の歩行者状態分類装置10は、LRF221‐22nによって各歩行者の位置を検出する。コンピュータ12は、各歩行者の単位時間毎の位置に基づいて各歩行者の平均歩行速度(vtnハット)と歩行方向のばらつき(dtn)を計算し、平均歩行速度が閾値より大きくかつ歩行方向のばらつきが閾値より小さい歩行者の歩行者状態を直行状態と分類する。平均歩行速度が閾値より小さいかと歩行方向のばらつきが閾値より大きいとき、コンピュータ12は歩行者が特定のターゲットに閾値以上の時間注目したかどうか判断し、そうでないとき、その歩行者の歩行者状態を回遊状態と分類する。
【効果】各歩行者の歩行者状態を的確に分類できる。
【効果】各歩行者の歩行者状態を的確に分類できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、歩行者状態分類装置およびプログラムに関し、特に、ショッピングモールなど不特定多数が利用する施設において、その施設内を移動する歩行者の行動を計測して各歩行者の状態を推定して分類する、新規な歩行者状態分類装置およびプログラムに関する。
【背景技術】
【0002】
商業施設内を移動している歩行者の振る舞いには、その歩行者の意図や行動目的が表れている。このため歩行者の振る舞いを分析することで、その意図や行動目的を推定し、その歩行者の目的に合わせたサービスを提供することができると考えられる。これは、たとえば、歩行者にとっては自分の好みの店のより詳しい情報を得ることができ、施設側にとっては顧客を呼び込むことができるなど、双方にとって有益となる。
【0003】
施設内の歩行者に関して従来から様々な分析が行われている。非特許文献1および2では、都市空間と歩行者の関係や美術館や博覧会における人間行動を歩行者の歩行速度によって分析した。非特許文献3では、商業施設における歩行者の行動目的を速度センサを用いた被験者実験で分類した。非特許文献4‐6では、歩行軌跡に着目して人間の行動を分析、判別を行う手法を提案し、マーケティングやセキュリティに用いる研究を行っている。また非特許文献7では、博物館において歩行速度と歩行軌跡・頭部方向により歩行者を分類した。
【0004】
また、非特許文献8では、本件発明者等は、商業施設内の歩行者に関して被験者実験を行い、飲食店を探している歩行者の興味や意図が行動(視線方向や歩行軌跡)にある程度共通した振る舞いとして表れることを示した。
【非特許文献1】清田真矢、松本直司、渡辺悠司「街路空間特性と歩行速度の関係」日本建築学会 pp949‐950、2007
【非特許文献2】樫村奈美、長澤夏子、木村謙、林田和人、渡辺仁史「観覧空間における歩行速度の比較に関する研究」日本建築学会大会学衛講演梗概集pp1053‐1054、2000
【非特許文献3】五代智哉、林田和人、渡辺仁史「商業施設における歩行速度と行動目的との関係に関する研究」日本建築学会学術講演梗概集pp567‐568、2008
【非特許文献4】羽生大輔、渡辺仁史「曲面壁の誘導性に関する研究:曲面壁の形状パターンと歩行軌跡からの分析」日本建築学会学術講演梗概集pp995‐996、2003
【非特許文献5】豊嶋伊知郎、板倉豊和、服部可奈子、吉田琢史、小磯貴史「多段階のパターン認識を用いた歩行軌跡データからの顧客行動判別」情報処理学会研究報告pp173‐178、200
【非特許文献6】豊嶋伊知郎、板倉豊和、服部可奈子、吉田琢史、小磯貴史「歩行軌跡を用いた歩行者行動判別手法の開発」電子情報通信学会技術研究報告pp19‐24、2006
【非特許文献7】山田辰美、柳沢豊、平田圭二、佐藤哲司「移動軌跡と頭部の向きに基づく歩行者の行動意味付け方法」情報処理学会論文誌pp2250‐2259、2005
【非特許文献8】岡本康太郎、内海章、山添大丈、宮下敬宏、高橋和彦、萩田紀博「視線計測を用いた商業施設における来店者行動の分析」電子情報通信学会技術研究報告 MVE、マルチメディア・仮想環境基礎 pp1‐6,2009
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記非特許文献8などによって歩行者の振る舞いを通して歩行者の目的を推定できることを示したが、商業施設に来店中の全ての歩行者が一様に同じ振る舞いをすることはなく、その歩行者の目的や興味の度合いにより行動に変化が生じる。そのため歩行者の内的状態により歩行者の行動分類を行う必要がある。
【0006】
それゆえに、この発明の主たる目的は、新規な、歩行者状態分類装置およびプログラムを提供することである。
【0007】
この発明の他の目的は、歩行者の状態を的確に分類できる、歩行者状態分類装置およびプログラムを提供することである。
【課題を解決するための手段】
【0008】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0009】
第1発明は、歩行者の位置を検出するための非接触センサ、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および第1条件判断手段が第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段を備える、歩行者の歩行者状態分類装置である。
【0010】
第1発明では、歩行者状態分類装置(10:実施例で相当する部分を示す参照号。以下同様。)は、たとえばLRFのような歩行者の位置を検出するための非接触センサ(221-22n)を備える。実施例ではともにコンピュータで構成される、歩行速度計算手段(12,445,S3)は、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算し、方向ばらつき計算手段(12,445,S3)は、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する。そして、第1条件判断手段(12,445,S11)は、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する。この第1条件判断手段が第1条件を満足すると判断したとき、直行状態分類手段(12,445,S13)その歩行者の歩行者状態を直行状態として分類する。
【0011】
第1発明によれば、歩行者の歩行者状態が直行状態(歩行目的、目的地が共に決まっていて目的地の場所も分かっており、そこに向かっている歩行者状態)かそれ以外かを的確に分類することかできる。
【0012】
第2発明は、第1発明に従属し、第1条件判断手段が第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断する第2条件判断手段、および第2条件判断手段が第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する回遊状態分類手段をさらに備える、歩行者状態分類装置である。
【0013】
第2発明では、第2条件判断手段(12,445,S15)は、第1条件判断手段が第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断し、回遊状態分類手段(12,445,S17)は、第2条件判断手段が第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する。したがって、第2発明によれば、歩行者の歩行者状態が回遊状態(たとえば、歩行目的、目的地、道順が決まっていない歩行者状態)かそれ以外かを的確に分類することかできる。
【0014】
第3発明は、第2発明に従属し、第2判断手段が第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する探索状態分類手段をさらに備える、歩行者状態分類装置である。
【0015】
第3発明では、探索状態分類手段(12,445,S21,S23)は、第2判断手段が第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する。したがって、第3発明によれば、歩行者の歩行者状態が探索状態(たとえば、歩行目的はあるが、目的に合う場所、道順は決まっていない歩行者状態)かそれ以外かを的確に分類することかできる。
【0016】
第4発明は、第3の発明に従属し、探索状態分類手段は、第3条件を満足するかどうかを判断する第3条件判断手段と、第3条件判断手段が第3条件を満足すると判断したとき、その歩行者の歩行者状態を道順探索状態として分類する道順探索状態分類手段とを含む、歩行者状態分類装置である。
【0017】
第4発明では、探索状態分類手段に含まれる第3条件判断手段(12,445,S19)が第3条件を満足すると判断したとき、道順探索状態分類手段(12,445,S21)が、その歩行者の歩行者状態を道順探索状態として分類する。
【0018】
第5発明は、第4発明に従属し、探索状態分類手段は、第3条件判断手段が第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する場所探索状態分類手段を含む、歩行者状態分類装置である。
【0019】
第5発明では、探索状態分類手段に含まれる場所探索状態分類手段(12,445,S23)が、第3条件判断手段によって第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する。
【0020】
第6発明は、歩行者の位置を検出するための非接触センサを備える歩行者の歩行者状態分類装置のコンピュータによって実行される歩行者状態分類プログラムであって、プログラムは、コンピュータを、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および第1条件判断手段が第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段として機能させる、歩行者状態分類プログラムである。
【0021】
第6発明によれば、第1発明と同様の効果が期待できる。
【発明の効果】
【0022】
この発明によれば、移動速度などの計測結果に基づいて歩行者の状態を分類するようにしたので、歩行者状態を的確に分類できる。
【0023】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0024】
【図1】図1はこの発明の一実施例の歩行者状態分類装置を示すブロック図である。
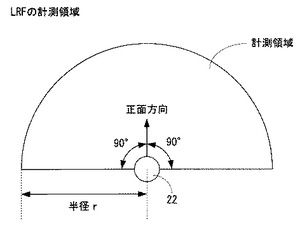
【図2】図2は図1実施例に用いられる非接触センサの一例であるレーザレンジファインダ(Laser Range Finder: LRF)の計測範囲を示す図解図である。
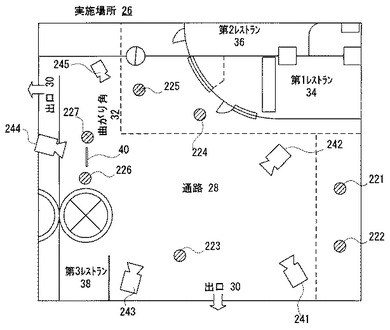
【図3】図3は実施例の歩行者状態分類装置を実験した実施場所の一例を示す図解図である。
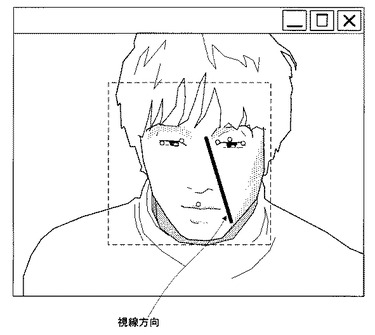
【図4】図4は歩行者の視線方向を示す図解図である。
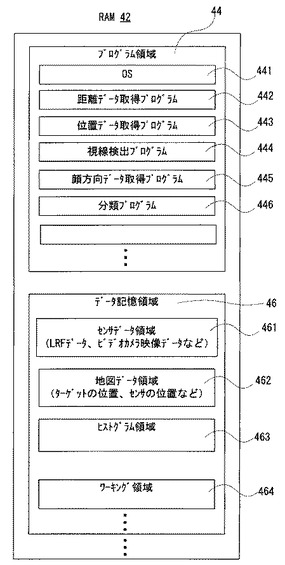
【図5】図5は実施例の歩行者状態分類装置のRAMのメモリマップの一例を示す図解図である。
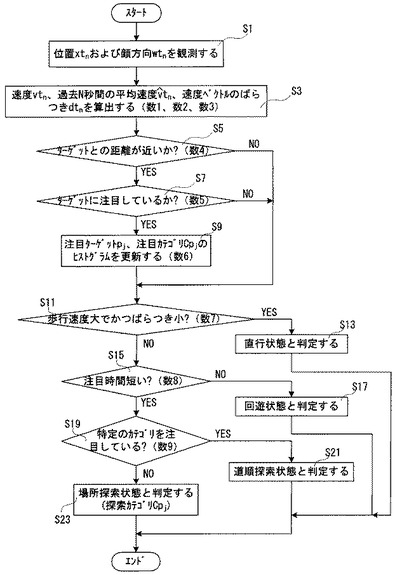
【図6】図6は実施例の歩行者状態分類装置における歩行者状態の分類動作の一例を示すフロー図である。
【図7】図7は実験によって手動的に分類したときの歩行者状態と歩行速度の関係を示すグラフである。
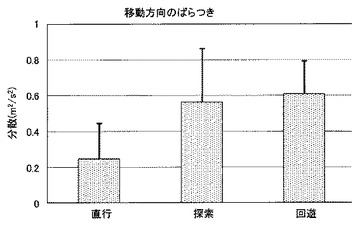
【図8】図8は実験によって手動的に分類したときの歩行者状態と移動方向のばらつきの関係を示すグラフである。
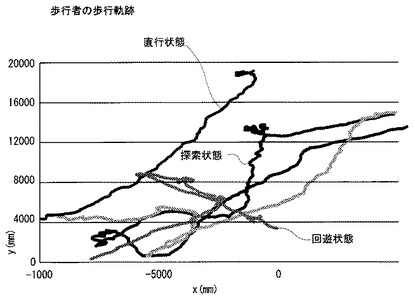
【図9】図9は歩行者の歩行軌跡の一例を示す図解図である。
【図10】図10は実験によって手動的に分類したときの歩行者状態と停止率の関係を示すグラフである。
【発明を実施するための最良の形態】
【0025】
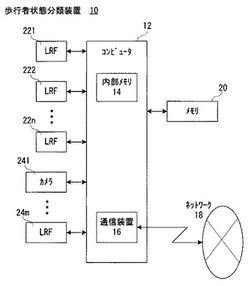
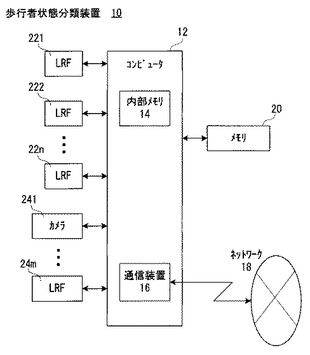
図1を参照して、この発明の一実施例の歩行者状態分類装置10は、コンピュータ12を含み、このコンピュータ12にはRAMやROMなどの内部メモリ14および必要に応じてネットワーク18を通じて他のシステムや装置のコンピュータ(図示せず)と通信するための通信装置16を備える。ただし、通信装置16はコンピュータ12に内蔵していなくてもよい。コンピュータ12に接続されているメモリ20はたとえばハードディスクや大容量半導体メモリなどでよく、コンピュータ12で処理するためのプログラムや処理する前後のデータを保存したりするために利用され得る。
【0026】
コンピュータ12にはさらに、LRF221‐22nとビデオカメラ241‐24mが接続される。なお、LRF221‐22nを区別する必要がない場合には、まとめて「LRF22」といい、ビデオカメラ241‐24mも区別する必要がない場合には、まとめて「カメラ24」という。
【0027】
LRF22は、レーザを照射し、物体や人間に反射して戻ってくるまでの時間から当該物体や人間までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンし、その反射波が帰ってくるまでの時間を検出することによって、物体までの距離がわかる。一例として、SICK社製のLRF(型式 LMS200)を用いることができる。このLRF22を用いた場合には、歩行者の位置をたとえば6cm程度の誤差で計測可能である。
【0028】
図2に示すように、LRF22の計測範囲は、半径R(R≒8m)の半円形状(扇形)で示される。つまり、LRF22は、その正面方向を中心とした場合に、左右90°の方向を所定の距離(R)以内で計測可能である。そして、たとえば図3に示すように、LRF22は、様々な場所に配置される。たとえば、図3においてLRF221‐226の各々は、検出領域が重なるように配置される。理由は、同じ歩行者について2台以上のLRFで検出した距離データによって、各歩行者の位置を検出するためである。なお、このようにLRF22を用いて人や物体の位置を計測する方法はたとえば、特開2009‐168578号公報などでよく知られている。
【0029】
また、歩行者の詳細な行動に関する解析を可能とするため、図3に示す実施場所26においては、上述のLRF221‐227による位置計測と併せて、場所26全体を複数(実施例では5台)のビデオカメラ241‐245で撮影した。これらのカメラ24で撮影した顔画像に対して、たとえば本件出願人の出願に係る特開2008‐102902号公報などで詳細に説明されている、視線推定処理を適用することにより、図4に示すような各歩行者の視線方向、つまり、顔を向けた方向を検出することができる。
【0030】
なお、図3に示す実施場所26には、この例では、通路28の両端に出口30が設定されていて、通路28の一方の出口30の手前には曲がり角32が、形成されている。さらに、通路28の両側には第1レストラン34、第2レストラン36および第3レストラン38が配置されている。図3におけるこれらの出口30、曲がり角32、レストラン34‐38と案内板40は、注目対象という意味で「ターゲット」と呼び、後述の数式では「pj」の記号で示される。なお、これらのターゲット30‐40はそれぞれカテゴリに区分でき、このカテゴリを後述の数式では「Cpj」の記号で示す。
【0031】
図5は図1実施例のコンピュータ12の内部メモリ14に含まれるRAM42のメモリマップの一例を示していて、この実施例では、RAM42は、プログラム領域44とデータ記憶領域46を含む。プログラム領域44には、OSを記憶するためのOS領域441が形成されている。さらに、プログラム領域44には、各歩行者に対する各LRFの距離データを取得するためのプログラム(距離データ取得プログラム)を記憶する距離データ取得プログラム記憶領域442が設けられる。さらに、各歩行者に対する各LRFの距離データから各歩行者の位置データを取得するためのプログラム(位置データ取得プログラム)を記憶する位置データ取得プログラム記憶領域443が設けられる。他に、各歩行者の顔画像から各歩行者の視線方向を検出するためのプログラム(視線検出プログラム)を記憶する距離視線検出プログラム記憶領域443および検出した視線に基づいて各歩行者の顔画像向いている方向のデータを取得するためのプログラム(顔方向データ取得プログラム)を記憶する顔方向データ取得プログラム記憶領域444が設けられる。分類プログラム記憶領域445に設定される分類プログラムは、これらのプログラムで検出した各位置データや顔方向データに基づいて各歩行者の歩行者状態を分類するためのプログラムである。この分類プログラム445には、歩行者状態分類に必要な、後述の数1‐数9などで示す計算式も併せて設定されている。
【0032】
データ記憶領域46には、たとえばLRF22の距離データやビデオカメラ24の映像データなどを一時的に記憶するためのセンサデータ記憶領域461、地図データを記憶するための地図データ記憶領域462、ヒストグラム記憶領域463およびワーキング領域464などが設定されている。地図データは、たとえば図3のように実施場所のおける各ターゲットの位置を示す位置データおよび各ターゲットのカテゴリ(各ターゲットの種類、レストラン、喫茶店、トイレ、店舗など)や、実施場所に配置されているセンサ、実施例ではLRF22やビデオカメラ24の設置位置の位置データなどが記憶されている。ヒストグラム記憶領域463に記憶されるヒストグラムはこの実施例では、各歩行者が注目したターゲット(注目ターゲット)のヒストグラムや注目しているターゲットのカテゴリ(注目カテゴリ)のヒストグラム(テーブル)を想定している。この注目ターゲットのヒストグラムをみれば、各歩行者のターゲット毎の注目回数(注目時間)が分かるし、注目カテゴリのヒストグラムをみれば、各歩行者のターゲットのカテゴリ毎の注目回数(注目時間)が分かる。
【0033】
上述の地図データは、基本的には、実施場所に応じて外部メモリ20(図1)からから読み出されて地図データ記憶領域462に設定される。同様に、プログラムについても必要の都度、外部メモリ20からプログラム領域44内に設定されるようにしてもよい。
【0034】
図6を参照して行なう実施例の動作の詳細な説明の前に、本件発明の背景について少し説明する。
【0035】
商業施設に来店中の歩行者の行動は商品あるいはサービスの消費に直結した情報が得られる可能性があり、施設側あるいは各店舗側の関心は高い。そのため、従来より、さまざまな顧客行動の分析手法が提案され、実際に利用されている。その中でも現在、実際に広く利用されている分析手法のひとつがPOS(販売時点情報管理)である。POSで得られる情報は商品毎の売上数量だけにとどまらず、商品間の消費の連動性や顧客の性別、年齢層と消費の関係などが加えられ、仕入れ計画、商品配置を決める際に重要な役割を果たしている。しかし、POSで得られる情報はあくまで「消費された」商品やサービスに関する情報であり、顧客が興味を持ったが消費には至らなかった「消費前」の行動についての情報は与えていない。そのため、POSを強化、補完するものとして「消費前行動」の分析が行われている。
【0036】
そこで、ここで説明する実施例では、「消費前行動」の分析として、一例としてLRFや商業施設内フロアのビデオ撮影を用いて商業施設のフロア内で来店中の人の追跡を行い、その歩行速度や歩行軌跡などの歩行中の振る舞いにより人の興味や意図の範囲の推定を行い、次のような歩行者の行動および歩行者状態を想定した。
【0037】
歩行者の行動を「歩行目的が定まっているか」、「目的に対応した場所(目的地)が定まっているか」、「目的地までの道順に関する知識があるか」によって分類すし、歩行目的のない歩行者の歩行者状態を「回遊状態」と呼び、目的にあった場所を探している歩行者、定まった目的地を探している歩行者の歩行者状態を「探索状態(場所または道順)」と呼び、歩行目的、目的地、道順全てを知っている歩行者の歩行者状態を「直行状態」と呼ぶことにする。歩行者の歩行者状態が推定、分類できれば、それぞれの状態の歩行者に適した以下のようなサービスを提供することができる。
【0038】
(1)回遊状態
歩行目的、目的地、道順が決まっていない歩行者状態であり、暇を潰している人や待ち合わせのためにフロア(図3で示す実施場所26のような)内にずっと滞在している歩行者がこの状態に該当する。フロアのお勧めスポットやイベント等の案内などのサービスが想定される。
【0039】
(2)探索状態
歩行目的はあるが、目的に合う場所、道順は決まっていない歩行者状態であり、食事をとる店や買い物を行う店(ターゲット)を探してフロアを探索している歩行者がこの状態に該当する。歩行目的に該当する店舗(カテゴリ)の情報を提供するサービスが想定される。また、歩行目的、目的地が共に決まっているが目的地の場所が解らずに目的地を探している状態の歩行者もこの状態に分類される。現在地点から目的地までの道順情報を提供するなどのサービスが想定される。
【0040】
(3)直行状態
歩行目的、目的地が共に決まっていて目的地の場所も分かっており、そこに向かっている歩行者状態である。「直行状態」の歩行者に関してはさらにその目的地付近で顔向きや視線の計測により来店目的の詳細な分析などを行ったうえで商品紹介などよりきめ細やかな情報提供を行うなどが考えられる。
【0041】
以上の背景を前提として、以下、図6のフロー図とともに、図1実施例の動作を説明する。図6のフロー図に示す歩行者状態分類動作は一例として0.5秒のような短時間に1回、その実施場所26(図3)内に存在する全ての歩行者について実行される。つまり、実施場所26の全歩行者についてその歩行者状態が所定時間毎に分類されるのである。
【0042】
図6の最初のステップS1では、コンピュータ12は、図5に示す距離データ取得プログラム442および位置データ取得プログラム443に従って各歩行者の時間(tn)での位置(xtn)を検出するとともに、視線検索プログラム444および顔方向データ取得プログラム445に従っての時間(tn)での各歩行者の顔方向(wtn)を検出する。つまり、各LRF22の設置位置が地図データから分かるとので、各LRFが検出した歩行者と間の距離を位置データに変換することよって、歩行者の位置(xtn)を特定することができる。同じように、ビデオカメラ24の設置位置やそれが向いている方向が地図データから分かるので、そのビデオカメラで検出した歩行者の顔方向(wtn)を実施場所26のグローバル(全体)座標系で表現することができ、それによって、後述のように、歩行者の顔がターゲットに向いているか、つまり、歩行者はターゲットを注目しているかどうかを判断することができる。
【0043】
続くステップS3において、コンピュータ12は、分類プログラム445(図5)に従って、時間(tn)での、各歩行者の、歩行(移動)速度(vtn)、過去N秒間の平均速度(vtnバー)および速度ベクトルのばらつき(dtn)を、それぞれ、数1、数2および数3に基づいて、計算する。なお、「バー」は、文字(この場合は“v”)の上に書かれるべき平均値を示す横棒(−)のことである。
【0044】
【数1】

【0045】
【数2】
【0046】
【数3】
【0047】
数1では、前回位置と今回位置との差を前回時刻と今回時刻の差で割っているので、移動速度が求まり、数2の前半ではそのようにして求めた移動速度の直近のN+1回分の値の合計をN+1で割っているので、平均速度ベクトルが求まる。数2の後半では、速度ベクトルに関する共分散行列を計算している。
【0048】
なお、数3の前半(vtnハット)は速度ベクトルの大きさの直近N+1回分の平均値であり平均速度を示す。数3の後半は、速度ベクトルのばらつきの大きさを数2で計算した共分散行列のトレース(共分散行列の斜め成分の合計)として計算している。なお、「ハット」は、文字(この場合は“v”)の上に書かれるべき平均値を示す山型(^)のことである。
【0049】
このようにして、ステップS3で、そのときの各歩行者の歩行速度(vtn)、平均速度(vtnハット)および速度ベクトルのばらつき(dtn)が計算される。
【0050】
続いて、コンピュータ12は、ステップS5において、各歩行者とターゲット(図3の実施場所であれば、レストランや出口、曲がり角など)との距離が近いかどうか判断する。つまり、数4の不等式を満足するかどうか判断する。つまり、ステップS5では、歩行者の位置(vtn)とターゲットの位置(xpj)との間の距離が閾値(εp)より小さいかどうか判断する。なお、ターゲットの位置は先に説明した地図データに設定されているので、それを用いればよい。
【0051】
【数4】
【0052】
このステップS5で“YES”を判断すると、コンピュータ12は、次のステップS7で、コンピュータ12は、数5に基づいて、歩行者がターゲットに注目しているかどうか判断する。数5では、そのときの顔方向(wtn)と、ステップS5で計算したターゲットの方向の内積を計算し、それが閾値cosθより大きいかどうか、つまり歩行者の顔方向がターゲットに正対する状態に近いかどうか判断している。
【0053】
【数5】
【0054】
ステップS5で“YES”でかつステップS7で“YES”のとき、つまり、歩行者がどれかのターゲットに近づいて注目していると判断したとき、コンピュータ12は次のステップS9で、ヒストグラム記憶領域463(図5)の注目ターゲット(pj)および注目カテゴリ(Cpj)のヒストグラムをそれぞれ更新する(数6)。
【0055】
【数6】
【0056】
その後ステップS11に進む。ただし、ステップS5で“NO”を判断したとき、またはステップS7で“NO”を判断したときにはいずれも、ステップS9を飛び越してステップS11に進む。
【0057】
ステップS11では、コンピュータ12は、数7に基づいて、歩行者の歩行(移動)速度が所定の閾値、たとえば0.5m/sより大きくかつ速度ベクトルのばらつきが所定の閾値より小さいかどうか、つまり第1条件を満足するかどうかを判断する。歩行速度が大きく、速度ベクトルのばらつきが小さいということは、その歩行者の歩行者状態は、先に説明した「直行状態」であると判断できる。つまり、目標に向って早足で歩行している状態である。したがって、このステップS11で“YES”を判断すると、コンピュータ12はステップS13で当該歩行者の歩行者状態を「直行状態」と分類する。したがって、ステップS13が直行状態分類手段を構成する。
【0058】
【数7】
【0059】
ステップS11で“NO”を判断したとき、歩行速度が大きくないか、または速度ベクトルのばらつきが小さくないということである。つまり、第1条件が満足されなかったということである。この場合、歩行者はゆっくり歩行しているか、歩行方向がまとまっていない(ばらばらである)という状態が想定できる。そこでコンピュータ12は、次のステップS15において、数8に従って、直行状態ではない歩行者の、特定のカテゴリへの注目時間が閾値より大きいかどうか、つまり、第2条件を満足するかどうか判断する。数8では、注目カテゴリのヒストグラムで示すそのカテゴリへの注目時間(B|Cpj|)を回数(n)で割った平均注目時間が所定の閾値より大きいか、つまり、その歩行者はどれかのカテゴリを閾値時間以上注目していたかどうか判断する。このステップS15で“NO”ということは、第2条件が満足されないということであり、歩行者はどのカテゴリに対しても注目時間が短く、注目ターゲットに一貫性がないということを意味する。このような歩行者状態のとき、実施例では、先に説明した「回遊状態」であるとしている。したがって、ステップS15で“NO”のとき、コンピュータ12は、ステップS17で当該歩行者の歩行者状態を「回遊状態」と分類する。したがって、ステップS17は回遊状態分類手段を構成する。
【0060】
【数8】
【0061】
直行状態でもなく、回遊状態でもないとき、つまり、ステップS11で“NO”でかつステップS15で“NO”を判断したとき、つまり、第1条件が満足されず、第2条件を満足するとき、コンピュータ12は次のステップS19で、歩行者が特定のカテゴリを注目しているかどうか、つまり、第3条件を満足するかどうか判断する。この実施例では、ステップS19では数9に基づいて判断するようにしているので、ステップS19ではつまり、歩行者は出口30や曲がり角32(図3)を長時間注目しているかどうかを判断する。
【0062】
【数9】
【0063】
ステップS19で“YES”なら、つまり、第3条件を満足すれば、歩行者は出口30や曲がり角32を長時間注目しているのであるから、次のステップS21でコンピュータ12は、そのときの歩行者の歩行者状態は道順を探索しながら歩行している状態(道順探索状態)であると分類する。したがって、ステップS21は道順探索状態分類手段を構成する。
【0064】
ステップS19で“NO”なら、つまり、第3条件を満足しないなら、歩行者は出口30や曲がり角32以外のカテゴリのターゲットを長時間注目している状態である。したがって、この場合には、注目カテゴリが道順探索に関係ないたとえば店舗などであるから、次のステップS23でコンピュータ12は、そのときの歩行者の歩行者状態は特定カテゴリ(Cpj)のターゲット(場所)を探索しながら歩行している状態(場所探索状態)であると分類する。したがって、ステップS23は場所探索状態分類手段を構成する。
【0065】
ただし、直行状態ではなく、回遊状態でもないときは、何らかのターゲットを探索しているターゲット探索状態であるので、その意味からすれば、ステップS21もS23も探索状態分類手段ということもできる。
【0066】
このように、説明した実施例によれば、LRF22やビデオカメラ24のように非接触センサによって、しかも歩行者に無線タグのような装着物を一切装着することなく、各歩行者の歩行者状態を分類することができる。ここで、発明者等が行なった実験を示し、このような分類に妥当性があることを説明する。
【0067】
実験では、まず平日の約5000人のデータから上記の各状態、直行状態、回遊状態、探索状態の歩行者が存在する昼時のデータを抽出し、以下の基準により手動ラベリングを行い各分類毎のサンプルデータを得た。まず、計測フロア内にある一定時間以上(180秒以上)存在している歩行者10名を「回遊状態」として分類した。次に途中で立ち止まるなどせず計測エリア内のレストランに直接入った歩行者26名を「直行状態」とした。その他のデータのうち、計測エリアを通過(素通り)した歩行者を除外し、途中で立ち止まったり、案内板などに立ち寄った歩行者21名を「探索状態」として分類した。
【0068】
そして、各状態の歩行者についての平均歩行速度(vtnハット)の分布を図8に示す。ここにみられるように、直行状態の歩行者の速度が他の2状態に比べて大きくなっている。直行状態の歩行者は、探索、回遊状態の歩行者に比べて歩行目的が明確であるため、それが歩行速度の差異に表れていると考えられる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的に有意な差が見られた。
【0069】
続いて、歩行軌跡、特に図8に示す移動方向のばらつきについて比較を行った。移動方向のばらつき(dtn)は各時刻毎の速度ベクトル(vtn)に基づいて数3のように定義した。なお、歩行軌跡の一例が図9に示される。この図9でも各歩行者状態によって特徴的な歩行軌跡を示している。
【0070】
図8に各状態毎の移動方向のばらつきを示す。図8より、直行状態の歩行者は移動方向のばらつきが小さく、移動方向が比較的安定しているのに対して、探索状態、回遊状態の歩行者は移動方向のばらつきが大きく頻繁に移動方向を変えていることがわかる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的に有意な差が見られた。
【0071】
抽出した3状態の歩行者に対して、歩行速度が一定以下となる停止状態が計測時間内でどの程度の割合であるかについて分析した。停止率(rtn)は数10で表される。ここで(v0)は停止と見なすかどうかの閾値(たとえば0.5m/s)であり、(rtn)は過去N+1回分の観測において停止と見なされた回数の割合を示す。
【0072】
【数10】
【0073】
図10に3状態の各歩行者の停止率を示す。図10より直行状態の歩行者については停止状態がほとんど見られないことがわかる。一方で、回遊状態の歩行者は前述の通り移動時の歩行速度が小さいことに加えて、長時間立ち止まると言った行動をとっていることがわかる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)、探索状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的な有意な差が見られた。
【0074】
さらに、歩行者の注視または注目行動は、歩行者の興味、意図に深くかかわっている。歩行者が首を振るといった行動をとるとき、歩行者の興味が定まっておらず、興味が移っていると考えられる。今回の分析では各状態の歩行者についてビデオによる目視解析により進行方向に対して顔が大きく(約45度程度)回転した回数を首振りとしてカウントし比較した。表1に各状態の歩行者の1分間あたりの首振り回数の平均を示す。表1の結果から、回遊状態とそれ以外との間に大きな違いが見られたが、探索状態や直行状態では顕著な差は見られなかった。
【表1】
【0075】
さらに、発明者等は、統計的に有意な差が観測された歩行速度、歩行軌跡のばらつき、フロア内停止率を用いて平日(木曜日)の昼間(12:00〜14:00)、夕方(18:00〜19:00)、休日(日曜日)の昼間(12:00〜14:00)の3つの時間帯のデータの分類を行った。分類には最近傍法(NN法)を利用し、直行状態、探索状態、回遊状態の3状態に分類した。
【0076】
その結果、平日の昼間の時間帯で2102人の歩行者中、1640人(78%)が直行状態、349人(17%)が探索状態、113人(5%)が回遊状態に分類された。平日の夕方の時間帯でもその割合はほぼ変わらず、747人の歩行者中、615人(82%)が直行状態、101人(14%)が探索状態、31人(4%)が回遊状態に分類された。
【0077】
これに対し、休日の昼間の時間帯では4671人の歩行者中、2747人(59%)が直行状態、1778人(38%)が探索状態、146人(3%)が回遊状態に分類される結果となり、探索状態の割合が増加する結果が得られた。この結果については以下のように解釈できる。
【0078】
今回実験を行ったショッピングモールは鉄道(ニュートラム)の最寄り駅とオフィスビルの中間に位置しており、オフィスビル勤務者の出勤や帰宅の経路として利用されている。また、昼間はこれらのオフィスビル勤務者が昼食をとるためあるいは出先に向かうためにこのエリアを多く歩行する。これらの歩行者は、当該ショッピングモールの通路や店舗の配置を熟知しているため、平日は時間帯に拘らず「直行状態」の歩行者が多くなったと考えられる。一方で、休日は食事や買い物を目的としてショッピングモールを訪れた家族連れやショッピングモール周辺で行われるイベントに参加するイベント参加者など普段この施設に馴染みのない歩行者が多いことがビデオ映像から観察された。これらの歩行者は目的地の位置が正確に把握できていなかったり、目的地が確定していないことが考えられる。このため平日に比べて休日は直行状態の歩行者の割合が減少し、探索状態の歩行者が増加する可能性が高い。上記で得られた分類結果はこれらの観察結果と符合しており、先に説明した実施例の分類の妥当性を示唆する結果が得られたといえる。
【0079】
なお、図6のようにして分類した歩行者状態を用いれば、各歩行者状態に丁度適合するイベントやサービスなどを提供することができる。たとえば、図1に示す通信装置16を用いてネットワーク18を介して、各歩行者への案内情報や各ターゲットへの歩行者誘引のお勧め情報を配信したりすることもできる。
【0080】
また、上述の実施例では、歩行者の位置などを検知するためにLRFを用いたが、他に、超音波センサや赤外線センサなども利用可能である。
【符号の説明】
【0081】
10 …歩行者状態分類装置
12 …コンピュータ
14 …内部メモリ
22、221‐22n …LRF
24、241‐24m …ビデオカメラ
【技術分野】
【0001】
この発明は、歩行者状態分類装置およびプログラムに関し、特に、ショッピングモールなど不特定多数が利用する施設において、その施設内を移動する歩行者の行動を計測して各歩行者の状態を推定して分類する、新規な歩行者状態分類装置およびプログラムに関する。
【背景技術】
【0002】
商業施設内を移動している歩行者の振る舞いには、その歩行者の意図や行動目的が表れている。このため歩行者の振る舞いを分析することで、その意図や行動目的を推定し、その歩行者の目的に合わせたサービスを提供することができると考えられる。これは、たとえば、歩行者にとっては自分の好みの店のより詳しい情報を得ることができ、施設側にとっては顧客を呼び込むことができるなど、双方にとって有益となる。
【0003】
施設内の歩行者に関して従来から様々な分析が行われている。非特許文献1および2では、都市空間と歩行者の関係や美術館や博覧会における人間行動を歩行者の歩行速度によって分析した。非特許文献3では、商業施設における歩行者の行動目的を速度センサを用いた被験者実験で分類した。非特許文献4‐6では、歩行軌跡に着目して人間の行動を分析、判別を行う手法を提案し、マーケティングやセキュリティに用いる研究を行っている。また非特許文献7では、博物館において歩行速度と歩行軌跡・頭部方向により歩行者を分類した。
【0004】
また、非特許文献8では、本件発明者等は、商業施設内の歩行者に関して被験者実験を行い、飲食店を探している歩行者の興味や意図が行動(視線方向や歩行軌跡)にある程度共通した振る舞いとして表れることを示した。
【非特許文献1】清田真矢、松本直司、渡辺悠司「街路空間特性と歩行速度の関係」日本建築学会 pp949‐950、2007
【非特許文献2】樫村奈美、長澤夏子、木村謙、林田和人、渡辺仁史「観覧空間における歩行速度の比較に関する研究」日本建築学会大会学衛講演梗概集pp1053‐1054、2000
【非特許文献3】五代智哉、林田和人、渡辺仁史「商業施設における歩行速度と行動目的との関係に関する研究」日本建築学会学術講演梗概集pp567‐568、2008
【非特許文献4】羽生大輔、渡辺仁史「曲面壁の誘導性に関する研究:曲面壁の形状パターンと歩行軌跡からの分析」日本建築学会学術講演梗概集pp995‐996、2003
【非特許文献5】豊嶋伊知郎、板倉豊和、服部可奈子、吉田琢史、小磯貴史「多段階のパターン認識を用いた歩行軌跡データからの顧客行動判別」情報処理学会研究報告pp173‐178、200
【非特許文献6】豊嶋伊知郎、板倉豊和、服部可奈子、吉田琢史、小磯貴史「歩行軌跡を用いた歩行者行動判別手法の開発」電子情報通信学会技術研究報告pp19‐24、2006
【非特許文献7】山田辰美、柳沢豊、平田圭二、佐藤哲司「移動軌跡と頭部の向きに基づく歩行者の行動意味付け方法」情報処理学会論文誌pp2250‐2259、2005
【非特許文献8】岡本康太郎、内海章、山添大丈、宮下敬宏、高橋和彦、萩田紀博「視線計測を用いた商業施設における来店者行動の分析」電子情報通信学会技術研究報告 MVE、マルチメディア・仮想環境基礎 pp1‐6,2009
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記非特許文献8などによって歩行者の振る舞いを通して歩行者の目的を推定できることを示したが、商業施設に来店中の全ての歩行者が一様に同じ振る舞いをすることはなく、その歩行者の目的や興味の度合いにより行動に変化が生じる。そのため歩行者の内的状態により歩行者の行動分類を行う必要がある。
【0006】
それゆえに、この発明の主たる目的は、新規な、歩行者状態分類装置およびプログラムを提供することである。
【0007】
この発明の他の目的は、歩行者の状態を的確に分類できる、歩行者状態分類装置およびプログラムを提供することである。
【課題を解決するための手段】
【0008】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0009】
第1発明は、歩行者の位置を検出するための非接触センサ、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および第1条件判断手段が第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段を備える、歩行者の歩行者状態分類装置である。
【0010】
第1発明では、歩行者状態分類装置(10:実施例で相当する部分を示す参照号。以下同様。)は、たとえばLRFのような歩行者の位置を検出するための非接触センサ(221-22n)を備える。実施例ではともにコンピュータで構成される、歩行速度計算手段(12,445,S3)は、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算し、方向ばらつき計算手段(12,445,S3)は、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する。そして、第1条件判断手段(12,445,S11)は、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する。この第1条件判断手段が第1条件を満足すると判断したとき、直行状態分類手段(12,445,S13)その歩行者の歩行者状態を直行状態として分類する。
【0011】
第1発明によれば、歩行者の歩行者状態が直行状態(歩行目的、目的地が共に決まっていて目的地の場所も分かっており、そこに向かっている歩行者状態)かそれ以外かを的確に分類することかできる。
【0012】
第2発明は、第1発明に従属し、第1条件判断手段が第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断する第2条件判断手段、および第2条件判断手段が第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する回遊状態分類手段をさらに備える、歩行者状態分類装置である。
【0013】
第2発明では、第2条件判断手段(12,445,S15)は、第1条件判断手段が第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断し、回遊状態分類手段(12,445,S17)は、第2条件判断手段が第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する。したがって、第2発明によれば、歩行者の歩行者状態が回遊状態(たとえば、歩行目的、目的地、道順が決まっていない歩行者状態)かそれ以外かを的確に分類することかできる。
【0014】
第3発明は、第2発明に従属し、第2判断手段が第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する探索状態分類手段をさらに備える、歩行者状態分類装置である。
【0015】
第3発明では、探索状態分類手段(12,445,S21,S23)は、第2判断手段が第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する。したがって、第3発明によれば、歩行者の歩行者状態が探索状態(たとえば、歩行目的はあるが、目的に合う場所、道順は決まっていない歩行者状態)かそれ以外かを的確に分類することかできる。
【0016】
第4発明は、第3の発明に従属し、探索状態分類手段は、第3条件を満足するかどうかを判断する第3条件判断手段と、第3条件判断手段が第3条件を満足すると判断したとき、その歩行者の歩行者状態を道順探索状態として分類する道順探索状態分類手段とを含む、歩行者状態分類装置である。
【0017】
第4発明では、探索状態分類手段に含まれる第3条件判断手段(12,445,S19)が第3条件を満足すると判断したとき、道順探索状態分類手段(12,445,S21)が、その歩行者の歩行者状態を道順探索状態として分類する。
【0018】
第5発明は、第4発明に従属し、探索状態分類手段は、第3条件判断手段が第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する場所探索状態分類手段を含む、歩行者状態分類装置である。
【0019】
第5発明では、探索状態分類手段に含まれる場所探索状態分類手段(12,445,S23)が、第3条件判断手段によって第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する。
【0020】
第6発明は、歩行者の位置を検出するための非接触センサを備える歩行者の歩行者状態分類装置のコンピュータによって実行される歩行者状態分類プログラムであって、プログラムは、コンピュータを、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、歩行速度が所定の閾値より大きくかつ歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および第1条件判断手段が第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段として機能させる、歩行者状態分類プログラムである。
【0021】
第6発明によれば、第1発明と同様の効果が期待できる。
【発明の効果】
【0022】
この発明によれば、移動速度などの計測結果に基づいて歩行者の状態を分類するようにしたので、歩行者状態を的確に分類できる。
【0023】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0024】
【図1】図1はこの発明の一実施例の歩行者状態分類装置を示すブロック図である。
【図2】図2は図1実施例に用いられる非接触センサの一例であるレーザレンジファインダ(Laser Range Finder: LRF)の計測範囲を示す図解図である。
【図3】図3は実施例の歩行者状態分類装置を実験した実施場所の一例を示す図解図である。
【図4】図4は歩行者の視線方向を示す図解図である。
【図5】図5は実施例の歩行者状態分類装置のRAMのメモリマップの一例を示す図解図である。
【図6】図6は実施例の歩行者状態分類装置における歩行者状態の分類動作の一例を示すフロー図である。
【図7】図7は実験によって手動的に分類したときの歩行者状態と歩行速度の関係を示すグラフである。
【図8】図8は実験によって手動的に分類したときの歩行者状態と移動方向のばらつきの関係を示すグラフである。
【図9】図9は歩行者の歩行軌跡の一例を示す図解図である。
【図10】図10は実験によって手動的に分類したときの歩行者状態と停止率の関係を示すグラフである。
【発明を実施するための最良の形態】
【0025】
図1を参照して、この発明の一実施例の歩行者状態分類装置10は、コンピュータ12を含み、このコンピュータ12にはRAMやROMなどの内部メモリ14および必要に応じてネットワーク18を通じて他のシステムや装置のコンピュータ(図示せず)と通信するための通信装置16を備える。ただし、通信装置16はコンピュータ12に内蔵していなくてもよい。コンピュータ12に接続されているメモリ20はたとえばハードディスクや大容量半導体メモリなどでよく、コンピュータ12で処理するためのプログラムや処理する前後のデータを保存したりするために利用され得る。
【0026】
コンピュータ12にはさらに、LRF221‐22nとビデオカメラ241‐24mが接続される。なお、LRF221‐22nを区別する必要がない場合には、まとめて「LRF22」といい、ビデオカメラ241‐24mも区別する必要がない場合には、まとめて「カメラ24」という。
【0027】
LRF22は、レーザを照射し、物体や人間に反射して戻ってくるまでの時間から当該物体や人間までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンし、その反射波が帰ってくるまでの時間を検出することによって、物体までの距離がわかる。一例として、SICK社製のLRF(型式 LMS200)を用いることができる。このLRF22を用いた場合には、歩行者の位置をたとえば6cm程度の誤差で計測可能である。
【0028】
図2に示すように、LRF22の計測範囲は、半径R(R≒8m)の半円形状(扇形)で示される。つまり、LRF22は、その正面方向を中心とした場合に、左右90°の方向を所定の距離(R)以内で計測可能である。そして、たとえば図3に示すように、LRF22は、様々な場所に配置される。たとえば、図3においてLRF221‐226の各々は、検出領域が重なるように配置される。理由は、同じ歩行者について2台以上のLRFで検出した距離データによって、各歩行者の位置を検出するためである。なお、このようにLRF22を用いて人や物体の位置を計測する方法はたとえば、特開2009‐168578号公報などでよく知られている。
【0029】
また、歩行者の詳細な行動に関する解析を可能とするため、図3に示す実施場所26においては、上述のLRF221‐227による位置計測と併せて、場所26全体を複数(実施例では5台)のビデオカメラ241‐245で撮影した。これらのカメラ24で撮影した顔画像に対して、たとえば本件出願人の出願に係る特開2008‐102902号公報などで詳細に説明されている、視線推定処理を適用することにより、図4に示すような各歩行者の視線方向、つまり、顔を向けた方向を検出することができる。
【0030】
なお、図3に示す実施場所26には、この例では、通路28の両端に出口30が設定されていて、通路28の一方の出口30の手前には曲がり角32が、形成されている。さらに、通路28の両側には第1レストラン34、第2レストラン36および第3レストラン38が配置されている。図3におけるこれらの出口30、曲がり角32、レストラン34‐38と案内板40は、注目対象という意味で「ターゲット」と呼び、後述の数式では「pj」の記号で示される。なお、これらのターゲット30‐40はそれぞれカテゴリに区分でき、このカテゴリを後述の数式では「Cpj」の記号で示す。
【0031】
図5は図1実施例のコンピュータ12の内部メモリ14に含まれるRAM42のメモリマップの一例を示していて、この実施例では、RAM42は、プログラム領域44とデータ記憶領域46を含む。プログラム領域44には、OSを記憶するためのOS領域441が形成されている。さらに、プログラム領域44には、各歩行者に対する各LRFの距離データを取得するためのプログラム(距離データ取得プログラム)を記憶する距離データ取得プログラム記憶領域442が設けられる。さらに、各歩行者に対する各LRFの距離データから各歩行者の位置データを取得するためのプログラム(位置データ取得プログラム)を記憶する位置データ取得プログラム記憶領域443が設けられる。他に、各歩行者の顔画像から各歩行者の視線方向を検出するためのプログラム(視線検出プログラム)を記憶する距離視線検出プログラム記憶領域443および検出した視線に基づいて各歩行者の顔画像向いている方向のデータを取得するためのプログラム(顔方向データ取得プログラム)を記憶する顔方向データ取得プログラム記憶領域444が設けられる。分類プログラム記憶領域445に設定される分類プログラムは、これらのプログラムで検出した各位置データや顔方向データに基づいて各歩行者の歩行者状態を分類するためのプログラムである。この分類プログラム445には、歩行者状態分類に必要な、後述の数1‐数9などで示す計算式も併せて設定されている。
【0032】
データ記憶領域46には、たとえばLRF22の距離データやビデオカメラ24の映像データなどを一時的に記憶するためのセンサデータ記憶領域461、地図データを記憶するための地図データ記憶領域462、ヒストグラム記憶領域463およびワーキング領域464などが設定されている。地図データは、たとえば図3のように実施場所のおける各ターゲットの位置を示す位置データおよび各ターゲットのカテゴリ(各ターゲットの種類、レストラン、喫茶店、トイレ、店舗など)や、実施場所に配置されているセンサ、実施例ではLRF22やビデオカメラ24の設置位置の位置データなどが記憶されている。ヒストグラム記憶領域463に記憶されるヒストグラムはこの実施例では、各歩行者が注目したターゲット(注目ターゲット)のヒストグラムや注目しているターゲットのカテゴリ(注目カテゴリ)のヒストグラム(テーブル)を想定している。この注目ターゲットのヒストグラムをみれば、各歩行者のターゲット毎の注目回数(注目時間)が分かるし、注目カテゴリのヒストグラムをみれば、各歩行者のターゲットのカテゴリ毎の注目回数(注目時間)が分かる。
【0033】
上述の地図データは、基本的には、実施場所に応じて外部メモリ20(図1)からから読み出されて地図データ記憶領域462に設定される。同様に、プログラムについても必要の都度、外部メモリ20からプログラム領域44内に設定されるようにしてもよい。
【0034】
図6を参照して行なう実施例の動作の詳細な説明の前に、本件発明の背景について少し説明する。
【0035】
商業施設に来店中の歩行者の行動は商品あるいはサービスの消費に直結した情報が得られる可能性があり、施設側あるいは各店舗側の関心は高い。そのため、従来より、さまざまな顧客行動の分析手法が提案され、実際に利用されている。その中でも現在、実際に広く利用されている分析手法のひとつがPOS(販売時点情報管理)である。POSで得られる情報は商品毎の売上数量だけにとどまらず、商品間の消費の連動性や顧客の性別、年齢層と消費の関係などが加えられ、仕入れ計画、商品配置を決める際に重要な役割を果たしている。しかし、POSで得られる情報はあくまで「消費された」商品やサービスに関する情報であり、顧客が興味を持ったが消費には至らなかった「消費前」の行動についての情報は与えていない。そのため、POSを強化、補完するものとして「消費前行動」の分析が行われている。
【0036】
そこで、ここで説明する実施例では、「消費前行動」の分析として、一例としてLRFや商業施設内フロアのビデオ撮影を用いて商業施設のフロア内で来店中の人の追跡を行い、その歩行速度や歩行軌跡などの歩行中の振る舞いにより人の興味や意図の範囲の推定を行い、次のような歩行者の行動および歩行者状態を想定した。
【0037】
歩行者の行動を「歩行目的が定まっているか」、「目的に対応した場所(目的地)が定まっているか」、「目的地までの道順に関する知識があるか」によって分類すし、歩行目的のない歩行者の歩行者状態を「回遊状態」と呼び、目的にあった場所を探している歩行者、定まった目的地を探している歩行者の歩行者状態を「探索状態(場所または道順)」と呼び、歩行目的、目的地、道順全てを知っている歩行者の歩行者状態を「直行状態」と呼ぶことにする。歩行者の歩行者状態が推定、分類できれば、それぞれの状態の歩行者に適した以下のようなサービスを提供することができる。
【0038】
(1)回遊状態
歩行目的、目的地、道順が決まっていない歩行者状態であり、暇を潰している人や待ち合わせのためにフロア(図3で示す実施場所26のような)内にずっと滞在している歩行者がこの状態に該当する。フロアのお勧めスポットやイベント等の案内などのサービスが想定される。
【0039】
(2)探索状態
歩行目的はあるが、目的に合う場所、道順は決まっていない歩行者状態であり、食事をとる店や買い物を行う店(ターゲット)を探してフロアを探索している歩行者がこの状態に該当する。歩行目的に該当する店舗(カテゴリ)の情報を提供するサービスが想定される。また、歩行目的、目的地が共に決まっているが目的地の場所が解らずに目的地を探している状態の歩行者もこの状態に分類される。現在地点から目的地までの道順情報を提供するなどのサービスが想定される。
【0040】
(3)直行状態
歩行目的、目的地が共に決まっていて目的地の場所も分かっており、そこに向かっている歩行者状態である。「直行状態」の歩行者に関してはさらにその目的地付近で顔向きや視線の計測により来店目的の詳細な分析などを行ったうえで商品紹介などよりきめ細やかな情報提供を行うなどが考えられる。
【0041】
以上の背景を前提として、以下、図6のフロー図とともに、図1実施例の動作を説明する。図6のフロー図に示す歩行者状態分類動作は一例として0.5秒のような短時間に1回、その実施場所26(図3)内に存在する全ての歩行者について実行される。つまり、実施場所26の全歩行者についてその歩行者状態が所定時間毎に分類されるのである。
【0042】
図6の最初のステップS1では、コンピュータ12は、図5に示す距離データ取得プログラム442および位置データ取得プログラム443に従って各歩行者の時間(tn)での位置(xtn)を検出するとともに、視線検索プログラム444および顔方向データ取得プログラム445に従っての時間(tn)での各歩行者の顔方向(wtn)を検出する。つまり、各LRF22の設置位置が地図データから分かるとので、各LRFが検出した歩行者と間の距離を位置データに変換することよって、歩行者の位置(xtn)を特定することができる。同じように、ビデオカメラ24の設置位置やそれが向いている方向が地図データから分かるので、そのビデオカメラで検出した歩行者の顔方向(wtn)を実施場所26のグローバル(全体)座標系で表現することができ、それによって、後述のように、歩行者の顔がターゲットに向いているか、つまり、歩行者はターゲットを注目しているかどうかを判断することができる。
【0043】
続くステップS3において、コンピュータ12は、分類プログラム445(図5)に従って、時間(tn)での、各歩行者の、歩行(移動)速度(vtn)、過去N秒間の平均速度(vtnバー)および速度ベクトルのばらつき(dtn)を、それぞれ、数1、数2および数3に基づいて、計算する。なお、「バー」は、文字(この場合は“v”)の上に書かれるべき平均値を示す横棒(−)のことである。
【0044】
【数1】
【0045】
【数2】
【0046】
【数3】
【0047】
数1では、前回位置と今回位置との差を前回時刻と今回時刻の差で割っているので、移動速度が求まり、数2の前半ではそのようにして求めた移動速度の直近のN+1回分の値の合計をN+1で割っているので、平均速度ベクトルが求まる。数2の後半では、速度ベクトルに関する共分散行列を計算している。
【0048】
なお、数3の前半(vtnハット)は速度ベクトルの大きさの直近N+1回分の平均値であり平均速度を示す。数3の後半は、速度ベクトルのばらつきの大きさを数2で計算した共分散行列のトレース(共分散行列の斜め成分の合計)として計算している。なお、「ハット」は、文字(この場合は“v”)の上に書かれるべき平均値を示す山型(^)のことである。
【0049】
このようにして、ステップS3で、そのときの各歩行者の歩行速度(vtn)、平均速度(vtnハット)および速度ベクトルのばらつき(dtn)が計算される。
【0050】
続いて、コンピュータ12は、ステップS5において、各歩行者とターゲット(図3の実施場所であれば、レストランや出口、曲がり角など)との距離が近いかどうか判断する。つまり、数4の不等式を満足するかどうか判断する。つまり、ステップS5では、歩行者の位置(vtn)とターゲットの位置(xpj)との間の距離が閾値(εp)より小さいかどうか判断する。なお、ターゲットの位置は先に説明した地図データに設定されているので、それを用いればよい。
【0051】
【数4】
【0052】
このステップS5で“YES”を判断すると、コンピュータ12は、次のステップS7で、コンピュータ12は、数5に基づいて、歩行者がターゲットに注目しているかどうか判断する。数5では、そのときの顔方向(wtn)と、ステップS5で計算したターゲットの方向の内積を計算し、それが閾値cosθより大きいかどうか、つまり歩行者の顔方向がターゲットに正対する状態に近いかどうか判断している。
【0053】
【数5】
【0054】
ステップS5で“YES”でかつステップS7で“YES”のとき、つまり、歩行者がどれかのターゲットに近づいて注目していると判断したとき、コンピュータ12は次のステップS9で、ヒストグラム記憶領域463(図5)の注目ターゲット(pj)および注目カテゴリ(Cpj)のヒストグラムをそれぞれ更新する(数6)。
【0055】
【数6】
【0056】
その後ステップS11に進む。ただし、ステップS5で“NO”を判断したとき、またはステップS7で“NO”を判断したときにはいずれも、ステップS9を飛び越してステップS11に進む。
【0057】
ステップS11では、コンピュータ12は、数7に基づいて、歩行者の歩行(移動)速度が所定の閾値、たとえば0.5m/sより大きくかつ速度ベクトルのばらつきが所定の閾値より小さいかどうか、つまり第1条件を満足するかどうかを判断する。歩行速度が大きく、速度ベクトルのばらつきが小さいということは、その歩行者の歩行者状態は、先に説明した「直行状態」であると判断できる。つまり、目標に向って早足で歩行している状態である。したがって、このステップS11で“YES”を判断すると、コンピュータ12はステップS13で当該歩行者の歩行者状態を「直行状態」と分類する。したがって、ステップS13が直行状態分類手段を構成する。
【0058】
【数7】
【0059】
ステップS11で“NO”を判断したとき、歩行速度が大きくないか、または速度ベクトルのばらつきが小さくないということである。つまり、第1条件が満足されなかったということである。この場合、歩行者はゆっくり歩行しているか、歩行方向がまとまっていない(ばらばらである)という状態が想定できる。そこでコンピュータ12は、次のステップS15において、数8に従って、直行状態ではない歩行者の、特定のカテゴリへの注目時間が閾値より大きいかどうか、つまり、第2条件を満足するかどうか判断する。数8では、注目カテゴリのヒストグラムで示すそのカテゴリへの注目時間(B|Cpj|)を回数(n)で割った平均注目時間が所定の閾値より大きいか、つまり、その歩行者はどれかのカテゴリを閾値時間以上注目していたかどうか判断する。このステップS15で“NO”ということは、第2条件が満足されないということであり、歩行者はどのカテゴリに対しても注目時間が短く、注目ターゲットに一貫性がないということを意味する。このような歩行者状態のとき、実施例では、先に説明した「回遊状態」であるとしている。したがって、ステップS15で“NO”のとき、コンピュータ12は、ステップS17で当該歩行者の歩行者状態を「回遊状態」と分類する。したがって、ステップS17は回遊状態分類手段を構成する。
【0060】
【数8】
【0061】
直行状態でもなく、回遊状態でもないとき、つまり、ステップS11で“NO”でかつステップS15で“NO”を判断したとき、つまり、第1条件が満足されず、第2条件を満足するとき、コンピュータ12は次のステップS19で、歩行者が特定のカテゴリを注目しているかどうか、つまり、第3条件を満足するかどうか判断する。この実施例では、ステップS19では数9に基づいて判断するようにしているので、ステップS19ではつまり、歩行者は出口30や曲がり角32(図3)を長時間注目しているかどうかを判断する。
【0062】
【数9】
【0063】
ステップS19で“YES”なら、つまり、第3条件を満足すれば、歩行者は出口30や曲がり角32を長時間注目しているのであるから、次のステップS21でコンピュータ12は、そのときの歩行者の歩行者状態は道順を探索しながら歩行している状態(道順探索状態)であると分類する。したがって、ステップS21は道順探索状態分類手段を構成する。
【0064】
ステップS19で“NO”なら、つまり、第3条件を満足しないなら、歩行者は出口30や曲がり角32以外のカテゴリのターゲットを長時間注目している状態である。したがって、この場合には、注目カテゴリが道順探索に関係ないたとえば店舗などであるから、次のステップS23でコンピュータ12は、そのときの歩行者の歩行者状態は特定カテゴリ(Cpj)のターゲット(場所)を探索しながら歩行している状態(場所探索状態)であると分類する。したがって、ステップS23は場所探索状態分類手段を構成する。
【0065】
ただし、直行状態ではなく、回遊状態でもないときは、何らかのターゲットを探索しているターゲット探索状態であるので、その意味からすれば、ステップS21もS23も探索状態分類手段ということもできる。
【0066】
このように、説明した実施例によれば、LRF22やビデオカメラ24のように非接触センサによって、しかも歩行者に無線タグのような装着物を一切装着することなく、各歩行者の歩行者状態を分類することができる。ここで、発明者等が行なった実験を示し、このような分類に妥当性があることを説明する。
【0067】
実験では、まず平日の約5000人のデータから上記の各状態、直行状態、回遊状態、探索状態の歩行者が存在する昼時のデータを抽出し、以下の基準により手動ラベリングを行い各分類毎のサンプルデータを得た。まず、計測フロア内にある一定時間以上(180秒以上)存在している歩行者10名を「回遊状態」として分類した。次に途中で立ち止まるなどせず計測エリア内のレストランに直接入った歩行者26名を「直行状態」とした。その他のデータのうち、計測エリアを通過(素通り)した歩行者を除外し、途中で立ち止まったり、案内板などに立ち寄った歩行者21名を「探索状態」として分類した。
【0068】
そして、各状態の歩行者についての平均歩行速度(vtnハット)の分布を図8に示す。ここにみられるように、直行状態の歩行者の速度が他の2状態に比べて大きくなっている。直行状態の歩行者は、探索、回遊状態の歩行者に比べて歩行目的が明確であるため、それが歩行速度の差異に表れていると考えられる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的に有意な差が見られた。
【0069】
続いて、歩行軌跡、特に図8に示す移動方向のばらつきについて比較を行った。移動方向のばらつき(dtn)は各時刻毎の速度ベクトル(vtn)に基づいて数3のように定義した。なお、歩行軌跡の一例が図9に示される。この図9でも各歩行者状態によって特徴的な歩行軌跡を示している。
【0070】
図8に各状態毎の移動方向のばらつきを示す。図8より、直行状態の歩行者は移動方向のばらつきが小さく、移動方向が比較的安定しているのに対して、探索状態、回遊状態の歩行者は移動方向のばらつきが大きく頻繁に移動方向を変えていることがわかる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的に有意な差が見られた。
【0071】
抽出した3状態の歩行者に対して、歩行速度が一定以下となる停止状態が計測時間内でどの程度の割合であるかについて分析した。停止率(rtn)は数10で表される。ここで(v0)は停止と見なすかどうかの閾値(たとえば0.5m/s)であり、(rtn)は過去N+1回分の観測において停止と見なされた回数の割合を示す。
【0072】
【数10】
【0073】
図10に3状態の各歩行者の停止率を示す。図10より直行状態の歩行者については停止状態がほとんど見られないことがわかる。一方で、回遊状態の歩行者は前述の通り移動時の歩行速度が小さいことに加えて、長時間立ち止まると言った行動をとっていることがわかる。直行状態と探索状態の歩行者間(p<0:01)、直行状態と回遊状態の歩行者間(p<0:01)、探索状態と回遊状態の歩行者間(p<0:01)でそれぞれ統計的な有意な差が見られた。
【0074】
さらに、歩行者の注視または注目行動は、歩行者の興味、意図に深くかかわっている。歩行者が首を振るといった行動をとるとき、歩行者の興味が定まっておらず、興味が移っていると考えられる。今回の分析では各状態の歩行者についてビデオによる目視解析により進行方向に対して顔が大きく(約45度程度)回転した回数を首振りとしてカウントし比較した。表1に各状態の歩行者の1分間あたりの首振り回数の平均を示す。表1の結果から、回遊状態とそれ以外との間に大きな違いが見られたが、探索状態や直行状態では顕著な差は見られなかった。
【表1】
【0075】
さらに、発明者等は、統計的に有意な差が観測された歩行速度、歩行軌跡のばらつき、フロア内停止率を用いて平日(木曜日)の昼間(12:00〜14:00)、夕方(18:00〜19:00)、休日(日曜日)の昼間(12:00〜14:00)の3つの時間帯のデータの分類を行った。分類には最近傍法(NN法)を利用し、直行状態、探索状態、回遊状態の3状態に分類した。
【0076】
その結果、平日の昼間の時間帯で2102人の歩行者中、1640人(78%)が直行状態、349人(17%)が探索状態、113人(5%)が回遊状態に分類された。平日の夕方の時間帯でもその割合はほぼ変わらず、747人の歩行者中、615人(82%)が直行状態、101人(14%)が探索状態、31人(4%)が回遊状態に分類された。
【0077】
これに対し、休日の昼間の時間帯では4671人の歩行者中、2747人(59%)が直行状態、1778人(38%)が探索状態、146人(3%)が回遊状態に分類される結果となり、探索状態の割合が増加する結果が得られた。この結果については以下のように解釈できる。
【0078】
今回実験を行ったショッピングモールは鉄道(ニュートラム)の最寄り駅とオフィスビルの中間に位置しており、オフィスビル勤務者の出勤や帰宅の経路として利用されている。また、昼間はこれらのオフィスビル勤務者が昼食をとるためあるいは出先に向かうためにこのエリアを多く歩行する。これらの歩行者は、当該ショッピングモールの通路や店舗の配置を熟知しているため、平日は時間帯に拘らず「直行状態」の歩行者が多くなったと考えられる。一方で、休日は食事や買い物を目的としてショッピングモールを訪れた家族連れやショッピングモール周辺で行われるイベントに参加するイベント参加者など普段この施設に馴染みのない歩行者が多いことがビデオ映像から観察された。これらの歩行者は目的地の位置が正確に把握できていなかったり、目的地が確定していないことが考えられる。このため平日に比べて休日は直行状態の歩行者の割合が減少し、探索状態の歩行者が増加する可能性が高い。上記で得られた分類結果はこれらの観察結果と符合しており、先に説明した実施例の分類の妥当性を示唆する結果が得られたといえる。
【0079】
なお、図6のようにして分類した歩行者状態を用いれば、各歩行者状態に丁度適合するイベントやサービスなどを提供することができる。たとえば、図1に示す通信装置16を用いてネットワーク18を介して、各歩行者への案内情報や各ターゲットへの歩行者誘引のお勧め情報を配信したりすることもできる。
【0080】
また、上述の実施例では、歩行者の位置などを検知するためにLRFを用いたが、他に、超音波センサや赤外線センサなども利用可能である。
【符号の説明】
【0081】
10 …歩行者状態分類装置
12 …コンピュータ
14 …内部メモリ
22、221‐22n …LRF
24、241‐24m …ビデオカメラ
【特許請求の範囲】
【請求項1】
歩行者の位置を検出するための非接触センサ、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、
前記歩行速度が所定の閾値より大きくかつ前記歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および
前記第1条件判断手段が前記第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段を備える、歩行者の歩行者状態分類装置。
【請求項2】
前記第1条件判断手段が前記第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断する第2条件判断手段、および
前記第2条件判断手段が前記第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する回遊状態分類手段をさらに備える、請求項1記載の歩行者状態分類装置。
【請求項3】
前記第2判断手段が前記第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する探索状態分類手段をさらに備える、請求項2記載の歩行者状態分類装置。
【請求項4】
前記探索状態分類手段は、第3条件を満足するかどうかを判断する第3条件判断手段と、前記第3条件判断手段が前記第3条件を満足すると判断したとき、その歩行者の歩行者状態を道順探索状態として分類する道順探索状態分類手段とを含む、請求項3記載の歩行者状態分類装置。
【請求項5】
前記探索状態分類手段は、前記第3条件判断手段が前記第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する場所探索状態分類手段を含む、請求項4記載の歩行者状態分類装置。
【請求項6】
歩行者の位置を検出するための非接触センサを備える歩行者の歩行者状態分類装置のコンピュータによって実行される歩行者状態分類プログラムであって、前記プログラムは、前記コンピュータを、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、
前記歩行速度が所定の閾値より大きくかつ前記歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および
前記第1条件判断手段が前記第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段
として機能させる、歩行者状態分類プログラム。
【請求項1】
歩行者の位置を検出するための非接触センサ、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、
前記歩行速度が所定の閾値より大きくかつ前記歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および
前記第1条件判断手段が前記第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段を備える、歩行者の歩行者状態分類装置。
【請求項2】
前記第1条件判断手段が前記第1条件を満足しないと判断したとき、第2条件を満足するかどうか判断する第2条件判断手段、および
前記第2条件判断手段が前記第2条件を満足しないと判断したとき、その歩行者の歩行者状態を回遊状態として分類する回遊状態分類手段をさらに備える、請求項1記載の歩行者状態分類装置。
【請求項3】
前記第2判断手段が前記第2条件を満足すると判断したとき、その歩行者の歩行者状態を探索状態として分類する探索状態分類手段をさらに備える、請求項2記載の歩行者状態分類装置。
【請求項4】
前記探索状態分類手段は、第3条件を満足するかどうかを判断する第3条件判断手段と、前記第3条件判断手段が前記第3条件を満足すると判断したとき、その歩行者の歩行者状態を道順探索状態として分類する道順探索状態分類手段とを含む、請求項3記載の歩行者状態分類装置。
【請求項5】
前記探索状態分類手段は、前記第3条件判断手段が前記第3条件を満足しないと判断したとき、その歩行者の歩行者状態を場所探索状態として分類する場所探索状態分類手段を含む、請求項4記載の歩行者状態分類装置。
【請求項6】
歩行者の位置を検出するための非接触センサを備える歩行者の歩行者状態分類装置のコンピュータによって実行される歩行者状態分類プログラムであって、前記プログラムは、前記コンピュータを、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行速度を計算する歩行速度計算手段、
前記非接触センサによって検出した歩行者の所定時間毎の位置に基づいて歩行者の歩行方向のばらつきを計算する方向ばらつき計算手段、
前記歩行速度が所定の閾値より大きくかつ前記歩行方向のばらつきが所定の閾値より小さいかという第1条件を満足するかどうか判断する第1条件判断手段、および
前記第1条件判断手段が前記第1条件を満足すると判断したとき、その歩行者の歩行者状態を直行状態として分類する直行状態分類手段
として機能させる、歩行者状態分類プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−168632(P2012−168632A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−27480(P2011−27480)
【出願日】平成23年2月10日(2011.2.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年6月19日付け、支出負担行為担当官 総務省大臣官房会計課企画官、研究テーマ「高齢者・障がい者(チャレンジド)のためのユビキタスネットワークロボット技術の研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月10日(2011.2.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年6月19日付け、支出負担行為担当官 総務省大臣官房会計課企画官、研究テーマ「高齢者・障がい者(チャレンジド)のためのユビキタスネットワークロボット技術の研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
[ Back to top ]