
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行者に対して経路案内を行う歩行者用の経路案内装置に関する。
【背景技術】
【0002】
従来より、例えば、目的地への経路案内(ナビゲーション)を行う経路案内装置としては、車載用のカーナビゲーション装置や、経路案内機能を備えた携帯電話機やPDAの携帯端末等が知られている。このような経路案内装置としては、例えば、GPS(Global Positioning System:全地球無線側位システム)を利用して現在地点を測位するものがある。しかし、GPSを利用した経路案内装置では、地下鉄構内や建築物内部等、GPS衛星のGPS信号を受信しにくい場所では、現在地点を検知できないおそれがある。
【0003】
GPS衛星等を利用せずに移動方向や移動距離を検出するための技術としては、自律航法技術が知られている。車載装置向けの自律航法技術としては、例えば、地磁気センサと車速センサとを利用したものがある(例えば、特許文献1参照。)。この自律航法技術では、車両の進行軸に略一致するように固定した地磁気センサを利用して車両の進行方向を検出し、車速センサを利用して移動距離を検出している。
【0004】
一方、歩行者が手で持ったり、ポケットに入れて携帯する経路案内装置の場合、車両等とは異なり、携帯される際の経路案内装置自体の姿勢を特定することが難しい。そこで、歩行者向けの装置に適用する自律航法技術としては、例えば、3次元加速度センサが検出する3軸方向の加速度と、3次元地磁気センサが検出する3軸方向の地磁気とに基づいて移動方向や移動距離を算出するものがある(例えば、特許文献2参照。)。この自律航法技術では、例えば、検出した加速度を積分することで移動速度及び移動距離を算出し、検出した地磁気に基づいて移動方向を算出している。
【0005】
しかしながら、上記従来の歩行者用の自律航法による経路案内装置では、次のような問題がある。すなわち、加速度を積分して速度や距離を求める際に誤差が増幅されるおそれがあり、精度の高い経路案内を実施できないおそれがあるという問題がある。
【0006】
【特許文献1】特開平8−327377号公報
【特許文献2】特開2005−283386号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来の問題点に鑑みてなされたものであり、自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る経路案内装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
第1の発明は、出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段と、
上記出発地点を出発した後に生じた上記歩行速度及び上記歩行進行方位を累積することにより、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点への経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置にある(請求項1)。
【0009】
上記第1の発明の歩行者用の経路案内装置は、上記第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、上記第2の3軸方向の加速度を計測する3基の加速度センシング手段とを備えたものである。さらに、上記歩行者用の経路案内装置は、上記加速度センシング手段が計測した上記加速度に基づいて上記鉛直方向を検出する上記鉛直方向検出手段を備えている。該鉛直方向検出手段によれば、当該経路案内装置に対する鉛直方向の向きを検出できる。さらに、上記方位検出手段によれば、上記磁気センシング手段による上記磁界強度と、上気鉛直方向検出手段が検出した上記鉛直方向とに基づいて、上記経路案内装置を中心とした上記絶対方位を検出し得る。ここで、上記絶対方位は、東西南北等、地磁気を基準とした絶対的な方位を意味している。
【0010】
加えて、上記歩行者用の経路案内装置は、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、上記鉛直方向と直交する水平面内で生じた加速度のうち、上記鉛直加速度と変動周期が略同一であって、かつ、所定の範囲内の位相遅れで変動する前進加速度を検出する第2の加速度検出手段とを備えている。当該第2の加速度検出手段は、発明者らの長期間に渡る実験及び実験データの解析等の研究活動を通じて見出した新たな知見に基づいて構成したものである。この新たな知見とは、人間が歩行する際に発生する鉛直方向の加速度と前後方向の加速度とが高い相関を有し、かつ、鉛直方向の加速度と前進方向の加速度との位相差が所定の範囲内にあるというものである。この新たな知見に基づいて構成した上記第2の加速度検出手段によれば、上記鉛直加速度に基づいて上記前進加速度を精度高く検出することが可能となる。そして、上記進行方向検出手段によれば、上記絶対方位における上記前進加速度の発生方位を表す上記歩行進行方位を検出できる。
【0011】
さらに、上記歩行者用の経路案内装置は、上記単位時間当たりに歩行者が歩行した上記歩数を算出する上記歩数算出手段と、当該単位時間当たりの歩数に対して上記歩幅データを乗算することで上記歩行速度を算出する歩行速度算出手段とを備えている。上記歩数算出手段は、上記鉛直方向加速度と上記前進加速度との間に共通する変動周期が、上記歩行者が歩行に際して足を踏み出す周期に一致するという新たな知見に基づいて構成したものである。上記単位時間当たりの歩数に基づけば、上記歩幅データと掛け合わせることで上記単位時間当たりの歩行距離である上記歩行速度を算出できる。このようにして算出した歩行速度は、その算出過程において、積分演算等を一切、必要としない。それ故、上記歩行速度算出手段によれば、積分演算に起因して発生し得る誤差を回避しながら、上記歩行速度を精度高く算出することが可能である。
【0012】
上記歩行者用の経路案内装置の上記現在地点測位手段は、過去の上記歩行速度及び上記歩行進行方位の時系列データを累積することにより上記現在地点を算出する。そして、上記経路情報計算手段は、上記現在地点から上記目標到達地点に至るために前進するべき方位と、上記現在地点における上記歩行進行方位との比較に基づいて上記進路方向を含む上記経路情報を計算する。
【0013】
上記第1の発明の歩行者用の経路案内装置によれば、上記歩行者が歩行する際の上記歩行速度と、その方位である上記歩行進行方位を検出し得る。過去の上記歩行速度及び上記歩行進行方位の時系列データに基づけば、例えば、GPS等の測位手段等に依存することなく、上記現在地点を算出することができる。そして、当該現在地点に到達した時点の上記歩行進行方位を基準とすれば、相対的な上記進路方向を算出することが可能である。ここで、上記歩行進行方位は、上記経路案内装置を中心とした上記絶対方位における絶対的な方位として検出可能である。そのため、上記経路案内装置によれば、上記歩行者が上記経路案内装置を手に持っているか、ポケットの中に入れてあるか、あるいはその向きや姿勢等に関わらず、上記進路方向を案内することが可能である。
【0014】
以上のように上記第1の発明の歩行者用の経路案内装置は、上記第1の3軸方向の磁界強度及び上記第2の軸方向の加速度に基づく自律航法を可能としたものである。この経路案内装置では、加速度の積分演算を前提としていないため、安定性高く経路案内を実施し得る。さらに、この経路案内装置では、上記歩行進行方位を絶対的な方位として算出し得る。そのため、この経路案内装置によれば、上記歩行者が上記経路案内装置を携帯する方法や、携帯する際の向きや姿勢等によらず、安定性高く上記進路方向の案内が可能である。
【0015】
第2の発明は、出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
GPS衛星から受信したGPS信号に基づいて、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点に到達するための経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置にある(請求項3)。
【0016】
上記第2の発明の歩行者用の経路案内装置は、上記第1の発明の経路案内装置における上記現在地点測位手段に代えて、上記GPS信号を利用して上記現在地点を測位するように構成した現在地点測位手段を有している。当該現在地点測位手段によれば、上記GPS信号を利用して精度高く上記現在地点を測位できる。
【0017】
一般に、上記歩行速度は、車の速度等と比べて非常に低速である。そのため、GPS信号を利用して、歩行速度の大きさと方向とを精度高く検出することが困難である。上記第2の発明の歩行者用の経路案内装置によれば、上記第1の発明と同様、自律航法により上記歩行速度と上記歩行進行方位とを精度高く検出し得る。
【0018】
したがって、上記第2の発明の歩行者用の経路案内装置によれば、上記第1の発明と同様、上記歩行者が上記経路案内装置を携帯する方法や、携帯する際の向きや姿勢等によらず、上記進路方向の案内が可能である。
【0019】
第3の発明は、無線通信を介して公衆電話回線に接続可能な携帯電話機であって、
上記第1あるいは上記第2の発明の歩行者用の経路案内装置に、無線通信手段を組み込みしたものであることを特徴とする携帯電話機にある(請求項14)。
【0020】
上記第3の発明の携帯電話機は、上記第1あるいは上記第2の発明の歩行者用の経路案内装置に上記無線通信手段を組み込んだものである。この携帯電話機によれば、使用者の歩行中に精度高く経路案内を実施することができる。特に、上記携帯電話機では、上記第1あるいは上記第2の発明と同様、上記使用者が上記携帯電話を携帯する方法や、携帯する際の向きや姿勢等によらず、上記進路方向の案内が可能である。それ故、上記第3の発明の携帯電話機によれば、例えば、歩行者が体の正面に構えた状態でなくても、安定性高く経路案内を実施できる。すなわち、この携帯電話機では、当該携帯電話機と使用者との相対的な位置関係に関わらず、経路案内を実施できる。
【発明を実施するための最良の形態】
【0021】
上記第1〜上記第3の発明においては、上記第1の3軸と上記第2の3軸とが一致するように上記各磁気センシング手段及び上記各加速度センシング手段を配設することが好ましい。この場合には、上記各手段における演算処理を容易にでき、演算の負担を軽減することができる。
【0022】
また、上記磁気センシング手段としては、ホールセンサ、MRセンサ、フラックスゲートセンサ、MIセンサ等により構成することができる。上記加速度センシング手段としては、ピエゾ抵抗型、静電容量型、磁気方式、熱検知方式によるもの等により構成することができる。
【0023】
また、上記鉛直加速度と上記前進加速度との間の上記所定の範囲内の位相遅れとしては、位相差ゼロ、すなわち位相遅れが存在しない状態をも含んでいる。発明者らの長期間に渡る実験データの蓄積と解析努力とによれば、上記鉛直加速度に対する上記前進加速度の位相遅れ量には個人差が存在している。上記鉛直加速度に対する上記前進加速度差の位相遅れがほとんど存在しない人もいれば、略一定の位相遅れが生じる人もいる。しかるに、上記前進加速度は、上記鉛直加速度の変動に続いて変動し、上記鉛直加速度に対して上記前進加速度の位相が進んでいるような事例はほぼ皆無である。このような事実は、持ち上げた足を前方に運ぶという動作を左右の足で交互に繰り返しながら前進するという人間の歩き方に、その根拠を求めることができる。
【0024】
上記第2の発明においては、上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段とを備えており、
上記現在地点算出手段は、上記POS位置情報を算出する際、上記出発地点の出発後に生じた上記歩行速度及び上記歩行進行方位を利用するように構成してあることが好ましい(請求項4)。
この場合には、上記歩行速度及び上記歩行進行方位を利用して、上記GPS信号に基づいて測位した上記現在地点の精度を高めることができる。
【0025】
また、上記第1あるいは上記第2の発明の歩行者用の経路案内装置は、上記歩幅データを学習するように構成した歩幅学習手段を備えていることが好ましい(請求項2、5)。
この場合には、上記経路案内装置を経路案内に利用するに伴って、上記歩幅データの精度を向上できる。なお、学習データとしては、例えば、上記目標到達地点までの実際の距離と、上記歩行速度に基づいて算出した距離との偏差等を利用することができる。そして、学習が進行して上記歩幅データが実際の寸法に近くなれば、上記歩行速度の算出精度を高めることができ、ひいては、上記経路案内の正確性を向上することが可能になる。
【0026】
上記第1〜第3の発明においては、上記第2の加速度検出手段は、上記鉛直加速度に対する位相遅れが0%以上15%以内である加速度を上記前進加速度として検出するように構成してあることが好ましい(請求項6)。
この場合には、上記鉛直加速度に基づいて上記前進加速度を精度高く検出することができる。多くの場合、上記位相遅れが0%以上15%以内の範囲にあるからである。上記位相遅れが0%未満のマイナス、すなわち上記鉛直加速度よりも上記前進加速度の位相が進んでいることは、人間の歩行方法を鑑みればほぼ皆無であると考え得る。一方、上記歩行進行方位の逆方向では、上記前進加速度の正負を逆転した加速度の変動が発生し得る。この加速度の変動は、上記前進加速度に対して180度、位相をずらした信号波形に近似している。したがって、15%を超える位相遅れを除外すれば、上記のような上記歩行進行方位の逆方向に生じる加速度の変動を誤検出するおそれを抑制できる。
【0027】
また、原出発地点及び最終目的地点を入力するためのユーザI/Fである地点入力手段と、上記原出発地点から上記最終目的地点までの経路中に位置する経由地点を計算する経路計算手段とを有しており、
上記目標到達地点設定手段は、通過直後の上記経由地点あるいは上記原出発地点を上記出発地点として設定すると共に、経路中、次に位置する上記経由地点あるいは上記最終目的地点を上記目標到達地点として設定するように構成してあることが好ましい(請求項7)。
【0028】
この場合には、例えば、原出発地点から最終目的地点に至るまでに経由するべき曲がり角やランドマーク等を上記経由地点に設定することができる。これらの経由地点を順番に上記出発地点あるいは上記目標到達地点として切替設定すれば、実際の道路の構造に即してわかりやすい経路案内を実施し得るようになる。
【0029】
また、上記経路案内手段は、上記目標到達地点への経路を音声案内するように構成してあることが好ましい(請求項8)。
この場合には、上記経路案内装置の表示画面等を見ることなく経路案内を利用できるようになる。それ故、上記経路案内装置によれば、かばんやポケットの中に入れたままでも経路案内を実施し得るようになる。したがって、この場合には、上記経路案内装置の向きや姿勢に関わらず経路案内を実施し得るという上記第1〜第3の発明の作用効果が特に有効となる。
【0030】
また、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることが好ましい(請求項9、10)。
この場合には、上記地図表示手段が表示する上記地図において、上記現在地点を確認できるようになる。歩行者にあっては、上記地図を利用して上記現在地点を確認することにより、不案内な経路を歩行する際に感じるおそれがある不安感等を抑制し得る。
【0031】
また、上記地図表示手段は、上記歩行進行方位が上側に位置するように上記地図を表示するように構成してあることが好ましい(請求項11)。
この場合には、進行方向を上にして上記地図を表示するという、いわゆるヘディングアップ機能により、上記地図を提示できるようになる。ヘディングアップ表示された地図によれば、歩行者は、一層、容易に経路あるいは曲がる方向等を確認できるようになる。特に、上記歩行者用の経路案内装置によれば、絶対的な上記歩行進行方位を検出し得るため、上記経路案内装置の向きや姿勢に関わらず、上記のようなヘディングアップ表示を実現し得る。
【0032】
また、上記各加速度センシング手段が検出する加速度に基づいて上記遊技者が上記経路案内装置に入力した加振操作を検出する第3の加速度検出手段と、該第3の加速度検出手段により検出した上記加振操作を制御信号に変換する操作変換手段とを有し、
上記制御信号に応じて所定の動作を行うように構成してあることが好ましい(請求項12)。
【0033】
この場合には、上記加振操作により上記経路案内装置を操作できるようになる。それ故、例えば、上記経路案内装置を上着のポケットや、かばん等に入れたまま、当該経路案内装置の操作を実施し得るようになる。上記加振操作による操作コマンドとしては、例えば、音声案内の要求コマンドや、経路の再計算や、経路案内の一時停止や終了のコマンド等がある。さらに、複数の操作コマンドを設定した場合には、例えば、上記加振操作の強弱や、回数や、リズム等を利用して、各操作コマンドを区別することが好ましい。
【0034】
また、上記磁気センシング手段は、マグネト・インピーダンス素子を利用して上記磁界強度を計測するように構成したものであり、
上記加速度センシング手段は、作用する加速度に応じて変位する磁石体を含む磁石体変位ユニットと、該磁石体が発生する磁界強度を計測するためのマグネト・インピーダンス素子を含む磁気検出ヘッドとを組み合わせたものであることが好ましい(請求項13)。
【0035】
この場合には、高精度に磁気を計測し得る上記マグネト・インピーダンス素子を利用して上記磁界強度及び上記加速度を高精度に検出できる。高精度に検出した上記磁界強度及び上記加速度に基づけば、一層、精度高く上記歩行速度あるいは上記歩行進行方位を算出できるようになる。高精度な歩行速度、歩行進行方位に基づけば、一層、正確性高く経路案内を実施し得るようになる。
【実施例】
【0036】
(実施例1)
本例は、歩行者用の経路案内装置1に関する例である。この内容について、図1〜図11を用いて説明する。
本例の経路案内装置1は、図1〜図3に示すごとく、出発地点から目標到達地点への経路案内を実施する歩行者用の装置である。
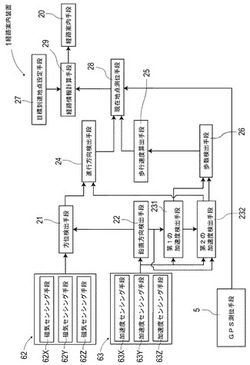
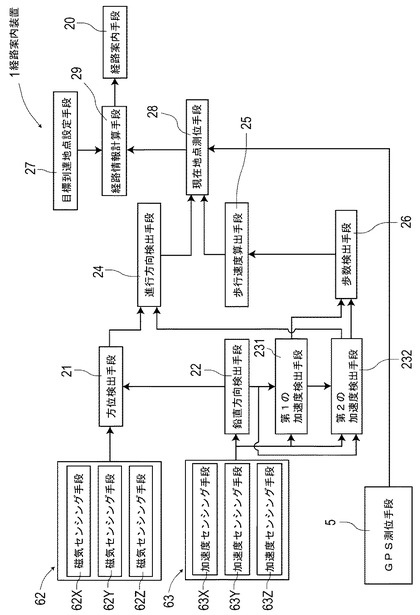
この経路案内装置1は、目標到達地点設定手段27と、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、上記3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、経路案内装置1を中心とした絶対方位を検出する方位検出手段21と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する進行方向検出手段24と、単位時間当たりの歩数を検出する歩数検出手段26と、歩行速度を算出する歩行速度算出手段25と、現在地点測位手段28と、経路情報を計算する経路情報計算手段29と、経路を案内する経路案内手段20とを備えている。
上記経路情報計算手段29は、現在地点から目標到達地点への方位を計算すると共に、当該方位と現在地点における歩行進行方位との比較に基づいて、歩行進行方位を基準とした相対的な進路方向を計算するように構成してある。
以下、この内容について詳しく説明する。
【0037】
本例の経路案内装置1は、図2及び図3に示すごとく、上記の構成に加えて、無線通信を介して公衆電話回線網に接続するための無線通信手段を有している。すなわち、本例の経路案内装置1は、無線通信を介して公衆電話回線網に接続可能な携帯電話機である。以下の説明では、経路案内装置1に代えて携帯電話機1という。
【0038】
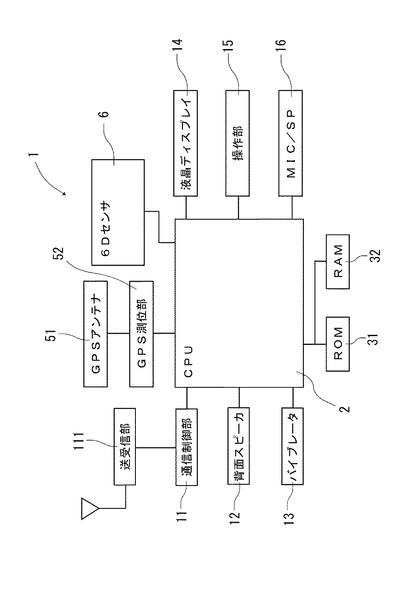
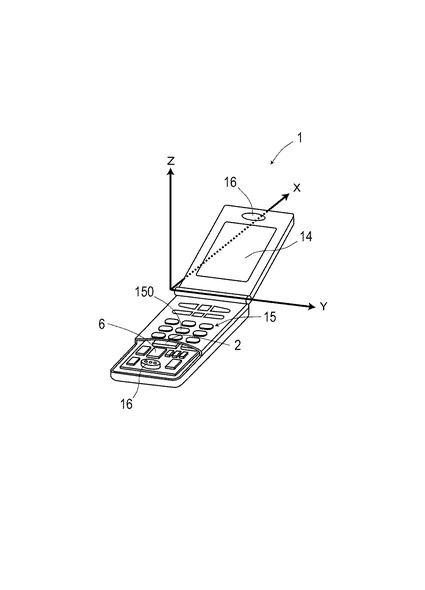
本例の携帯電話機1は、図2及び図3に示すごとく、折り畳み可能であって、折り畳んだときに液晶ディスプレイ14及び操作部15が内側に収容される折り畳み式のものである。携帯電話機1は、データ通信用のアンテナを含み、データの変復調を行う送受信部111と、データの送受信を制御する通信制御部11と、表示用の液晶ディスプレイ14と、データ通信等を実施するのに必要な各種演算を行うCPU2と、各種データを記憶するメモリー部31、32(以下、適宜ROM31、RAM32と記載する。)とを有する。また、ユーザI/Fとしては、テンキーボタン150を含む操作部15と、音声通話用のマイク及びスピーカ16と、着信お知らせ用のスピーカ12及びバイブレータ13等とを備えている。
【0039】
本例の携帯電話機1は、図1〜図3に示すごとく、経路案内(ナビゲーション機能)を実施するための構成として、上記のごとく、目標到達地点設定手段27と、3基の磁気センシング手段62と、3基の加速度センシング手段63と、鉛直方向検出手段22と、方位検出手段21と、第1及び第2の加速度検出手段231、232と、進行方向検出手段24と、歩数検出手段26と、歩行速度算出手段25と、現在地点測位手段28と、経路情報計算手段29と、経路案内手段20とを備えている。さらに、本例の携帯電話機1は、地図データを記憶する地図データ記憶手段(本例では、ROM31。)と、当該地図データに基づく地図を表示する地図表示手段(本例では、液晶ディスプレイ14。)とを備えている。
【0040】
まず、上記地図データ記憶手段及び上記地図表示手段について説明する。本例の地図データは、地図を描画するための描画データと、位置情報である緯度経度データとを組み合わせたものである。この地図データによれば、描画データに基づく地図上の各位置について、緯度経度データを参照可能である。地図データ記憶手段(ROM31)は、この地図データを格納する手段である。
【0041】
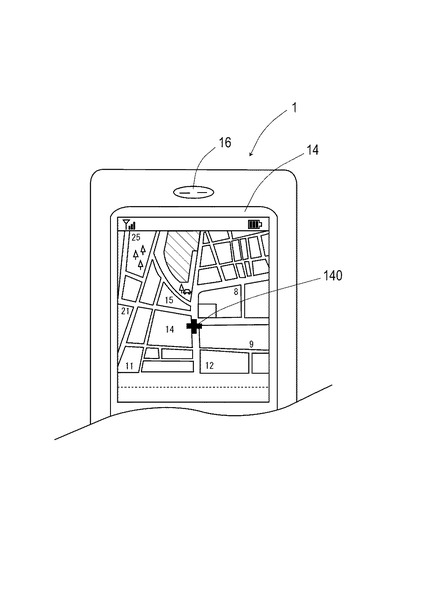
地図表示手段(液晶ディスプレイ14)は、図3及び図4に示すごとく、地図データ(描画データ)に基づいて視認可能な地図を表示する手段である。地図表示手段は、地図データ記憶手段(ROM31)が記憶する地図データを読み出し、当該地図データに基づく地図を表示する。地図表示手段は、地図の略中央の位置に、十字カーソル140をオーバーレイ表示(重ね合わせ表示)するように構成してある。この十字カーソル140を地図中で移動させるように操作すれば、液晶ディスプレイ14上で地図をスクロールさせることができる。さらに、この十字カーソル140が位置する地図上の位置を選択することにより、例えば、目標到達地点等、特定の地点の入力が可能である。本例の地点入力手段は、上記のごとく、十字カーソル140を利用して、地図上の特定の地点を選択することで、地点を入力できるように構成した手段である。なお、使用者が、目標到達地点の緯度経度データを直接、入力するように地点入力手段を構成することもできる。さらには、住所番地や電話番号等を入力することで、目標到達地点を入力しても良い。この場合には、住所番地や電話番号や施設名称等と、緯度経度データ等の位置情報とを対応付けるリンクデータをROM31に格納しておくことが好ましい。
【0042】
上記目標到達地点設定手段27は、図1、図3及び図4に示すごとく、経路案内の対象である目標到達地点の位置情報であるDST位置情報を設定する手段である。本例の携帯電話機1の使用者は、上記のごとく、目標到達地点として入力したい地点に十字状のカーソル140を合わせて選択するという操作により、目標到達地点を入力し得る。目標到達地点設定手段27は、十字カーソル140が位置する地図上のポイントの緯度経度データを参照し、DST位置情報として設定する。
【0043】
上記鉛直方向検出手段22は、図1及び図3に示すごとく、上記3基の加速度センシング手段63が計測した加速度に基づいて、携帯電話機1の鉛直方向を検出する手段である。本例の鉛直方向検出手段22では、鉛直方向を検出するに当たって、計測された加速度に対して周波数解析を適用してその直流成分を抽出している。加速度の直流成分は、重力加速度等、静的に作用する加速度に起因するものである。それ故、加速度の直流成分に基づけば、前進加速度等、動的に発生する加速度に関わらず、携帯電話機1の鉛直方向を精度高く検出し得る。
【0044】
上記方位検出手段21は、図1及び図3に示すごとく、携帯電話機1を中心とした絶対方位を検出する手段である。この絶対方位とは、地磁気の発生方向を基準とした絶対的な方位である。方位検出手段21は、鉛直方向検出手段22が検出した上記鉛直方向に基づいて、当該鉛直方向に直交する水平面を特定する。そして、3基の磁気センシング手段62による3軸方向の磁界強度に基づいて上記水平面に属する各方向の磁界強度の分布を求め、当該分布に基づいて絶対方位を算出する。
【0045】
第1の加速度検出手段231は、図1及び図3に示すごとく、鉛直方向に作用する加速度を検出する手段である。具体的には、3基の加速度センシング手段63が計測した3軸方向の加速度成分に基づいて、鉛直方向の加速度成分を求め、これを上記鉛直加速度とする。第1の加速度検出手段231は、過去の所定の時間区間内にサンプリングした鉛直加速度の時系列データをRAM32に格納する。
【0046】
第2の加速度検出手段232は、図1及び図3に示すごとく、歩行者の進行方向に作用する前進加速度を検出する手段である。第2の加速度検出手段232は、上記鉛直方向検出手段22が検出した鉛直方向に直交する水平面を特定するように構成してある。第2の加速度検出手段232は、この水平面内に属する方位のうち、予め設定した所定のしきい値を超える加速度のピーク値が検出された方位を検出し、当該方位における加速度の時系列データをRAM32に格納する。さらに、第2の加速度検出手段232は、方位毎の加速度の時系列データのうち、上記鉛直加速度と変動周期が略一致しており、かつ、当該変動周期の0〜15%以内の位相遅れを保ちながら変動する時系列データを検出する。そして、検出できた時系列データの方位に生じる加速度をもって、歩行に伴って発生する前進方向の前進加速度として検出するように構成してある。
【0047】
進行方向検出手段24は、図1及び図3に示すごとく、前進加速度が発生した方位を検出する手段である。進行方向検出手段24は、地磁気に対して前進加速度が発生した絶対的な方位である歩行進行方位を検出する。
歩数検出手段26は、単位時間当たりの歩数を検知する手段である。歩数検出手段26は、上記第1の加速度検出手段231が検出した鉛直加速度と、上記第2の加速度検出手段232が検出した前進加速度とに共通する変動周期の逆数を計算することにより、単位時間当たりの変動サイクル数を算出する。そして、歩数検出手段26は、当該単位時間当たりの変動サイクル数を単位時間当たりの歩数として検出する。
【0048】
歩行速度算出手段25は、図1及び図3に示すごとく、単位時間当たりの歩行距離、すなわち歩行速度を算出する手段である。歩行速度算出手段25は、歩数検出手段26が検出した単位時間当たりの歩数に対して、予め記憶した歩行者の歩幅データを掛け合わせることにより、上記歩行速度を算出する。なお、本例では、上記歩幅データとして、使用者が予め設定した歩幅を利用した。
【0049】
歩幅データを学習するための歩幅学習手段を設けることも良い。例えば、経路案内を実施する際、実際の距離と、歩幅データに基づいて算出した移動距離との偏差が小さくなるように歩幅データを学習すれば、当該歩幅データを実際の歩幅の寸法に近づけることができる。歩幅データの学習がすすめば、一層、精度高く歩行速度あるいは歩行距離を算出できるようになる。
【0050】
現在地点測位手段28は、図1〜図3に示すごとく、自律航法による測位と、GPSによる測位とを選択的に切り替えて現在地点の位置情報であるPOS位置情報を算出する手段である。本例では、POS位置情報として緯度経度データに基づく位置情報を算出している。現在地点測位手段28は、屋内等、GPSの送信電波を受信しにくい状況では自律航法により現在地点を測位し、GPSの送信電波を良好に受信可能な状況ではGPSによる現在地点を測位するように構成してある。
【0051】
GPS測位手段5は、図1及び図2に示すごとく、GPSアンテナ51とGPS測位部52とを有している。GPS測位部52は、3点測量の原理を利用して現在地点を測位するものである。GPS測位部52は、GPSアンテナ51を介して、例えば、4つ以上のGPS衛星のGPS信号を受信し、各GPS衛星との距離を測定する。そして、GPS測位部52は、各GPS衛星との距離に基づいて、現在地点の位置情報であるPOS位置情報を算出する。
【0052】
一方、自律航法による現在地点の測位は、現在地点に到達する過程における歩行速度及び歩行進行方位の時系列データに基づいて実施される。例えば、GPSによる測位が難しいトンネルの中に進入した際には、トンネル進入後に生じた歩行速度及び歩行進行方位の時系列データを累積することにより、トンネル進入後の移動方向及び移動距離を算出し得る。トンネル入り口の緯度経度データに基づけば、上記移動方向及び移動距離に基づいて現在地点の位置情報であるPOS位置情報を精度高く算出し得る。
【0053】
上記経路情報計算手段29は、図1に示すごとく、現在地点から目標到達地点への方位と、現在地点における上記歩行進行方位との比較に基づいて、歩行進行方位を基準とした相対的な進路方向を計算するように構成してある。本例の経路情報計算手段29は、さらに、現在地点から目標到達地点までの距離である進路距離を計算するように構成してある。
【0054】
なお、現在地点から目標到達地点への方位は、POS位置情報とDST位置情報とに基づいて計算可能である。すなわち、この方位は、arctan((POS経度−DST経度)/(POS緯度−DST緯度))として求められる。ここで、POS緯度、POS経度は、POS位置情報のうちの緯度データ、経度データであり、また、DST緯度、DST経度は、DST位置情報のうちの緯度データ、経度データである。
【0055】
経路案内手段20は、図1及び図2に示すごとく、背面スピーカ12を利用して経路情報を音声案内する手段である。この経路案内手段20によれば、携帯電話機1をポケットやかばんに入れたまま、経路案内を利用し得る。音声による経路案内としては、「左に曲がってください。」とか、「そのまままっすぐ100m先です。」等の経路案内が考えられる。
【0056】
次に、互いに直交する3軸方向の磁界強度及び加速度を計測する6Dセンサ6について、図2、図3及び図5を用いて説明する。6Dセンサ6は、上記3基の加速度センシング手段63及び上記3基の磁気センシング手段62を一体的にモジュール化したものである。
各磁気センシング手段62は、地球の磁気である地磁気及び地磁気によって生じる磁場を検出する磁気検出素子64を備えている。
各加速度センシング手段63は、加速度に応じて磁石体631が変位するように構成した磁石体変位ユニット630と、磁石体631の変位を検知する磁気検出ヘッド635とからなる。この磁気検出ヘッド635は、磁気センシング手段62と同じ仕様の磁気検出素子64を備えている。
【0057】
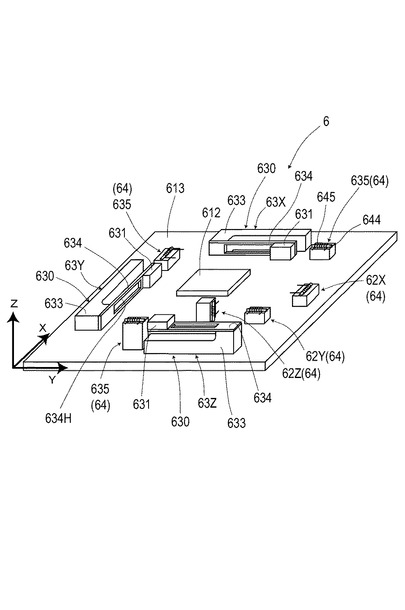
6Dセンサ6は、図3及び図5に示すごとく、3基の磁気センシング手段62と、3基の加速度センシング手段63と、これらの手段が含む6個の磁気検出素子64を制御する1個の制御回路612(制御ICチップ)とを共通基板613に実装したものである。なお、本例では、共通基板613の外縁をなす直交2辺に沿ってX軸及びY軸を規定し、基板613の法線方向に沿ってZ軸を規定してある。
【0058】
磁気センシング手段62としては、図3及び図5に示すごとく、X軸方向の磁界強度を計測する磁気センシング手段62Xと、Y軸方向の磁界強度を計測する磁気センシング手段62Yと、Z軸方向の磁界強度を計測する磁気センシング手段62Zとの3基がある。各磁気センシング手段62は、磁気検出素子64を用いて構成してある。本例の磁気検出素子64は、マグネト・インピーダンス素子(MI素子)よりなる。MI素子の磁気計測原理等については、後で説明する。
【0059】
加速度センシング手段63としては、図3及び図5に示すごとく、X軸方向の加速度を計測する加速度センシング手段63Xと、Y軸方向の加速度を計測する加速度センシング手段63Yと、Z軸方向の加速度を計測する加速度センシング手段63Zとの3基がある。各加速度センシング手段63は、作用する加速度に応じて磁石体631が変位するように構成した磁石体変位ユニット630と、磁気検出ヘッド635とを組み合わせたものである。ここで、磁気検出ヘッド635は、上記磁気センシング手段62と同様、MI素子よりなる磁気検出素子64を利用して構成してある。
【0060】
磁石体変位ユニット630は、図5に示すごとく、共通基板613に固定した支持ポスト633と、該支持ポスト633に一方の端部を支持されていると共に他端に磁石体631を保持するカンチレバー634とよりなる。カンチレバー634は、材質Ni−Pよりなる略矩形板状のものである。本例のカンチレバー634は、その一端を支持ポスト633に固定してなり、支持ポスト633を中心として回動するよう弾性的に変形し得る。本例のカンチレバー634では、加速度に対する磁石体631の変位量を大きく確保できるよう、支持ポスト633側の付け根部分から自由端の手前に至る位置にかけて長孔634Hを設けてある。
【0061】
カンチレバー634は、図3及び図5に示すごとく、略矩形板状の厚さ方向に作用する加速度に応じて撓むように構成してある。X軸方向の加速度を検出する加速度センシング手段63Xのカンチレバー634は、X軸方向の撓みを生じる。Y軸方向の加速度を検出する加速度センシング手段63Yのカンチレバー634は、Y軸方向の撓みを生じる。Z軸方向の加速度を検出する加速度センシング手段63Zのカンチレバー634は、Z軸方向の撓みを生じる。
【0062】
磁石体631は、図5に示すごとく、カンチレバー634の自由端側の端部に配設してある。本例の磁石体631は、カンチレバー634の表面に塗布した磁石体塗料の乾燥、硬化後の着磁により形成したものである。磁石体631は、カンチレバー634の撓みに応じて変位する。なお、このカンチレバー634の撓みや自由端の変位は微少であり、例えば、カンチレバー634の自由端の変位は、カンチレバー634の長さの10分の1程度以下である。
【0063】
磁気検出ヘッド635は、図5に示すごとく、カンチレバー634の自由端側の先端面に対向するように配設してある。磁気検出ヘッド635は、上記磁気センシング手段62と同一仕様の磁気検出素子64よりなる。本例では、上記のごとく、磁気検出素子64として、マグネト・インピーダンス素子を採用している。
【0064】
ここで、マグネト・インピーダンス素子について説明する。マグネト・インピーダンス素子は、図5に示すごとく、アモルファスワイヤよりなる感磁体644と、該感磁体644に外挿するように配置した略円筒状の検出コイル645とを組み合わせたものである。このマグネト・インピーダンス素子は、周辺磁界の強度に応じてインピーダンスが変化するという、アモルファスワイヤよりなる感磁体644が発揮するMI(Magneto−impedance)現象を利用したものである。MI現象は、供給する電流方向に対して周回方向に電子スピン配列を有する磁性材料からなる感磁体644に生じる現象である。
【0065】
マグネト・インピーダンス素子よりなる本例の磁気検出素子64は、アモルファスワイヤよりなる感磁体644の通電電流を急激に変化させたときの電子スピン方向の変化に伴う感磁体の内部磁化及びインピーダンス等の変化を、検出コイル645の両端に発生する電圧(誘起電圧)に変換する。この磁気検出素子64は、感磁体644であるアモルファスワイヤの長手方向に磁気検出感度を有している。
【0066】
なお、磁気検出素子64としては、本例のマグネト・インピーダンス素子のほか、ホール素子や、フラックスゲートセンサ、MRセンサ、ピックアップコイル式のもの等、様々な原理のものを採用できる。
【0067】
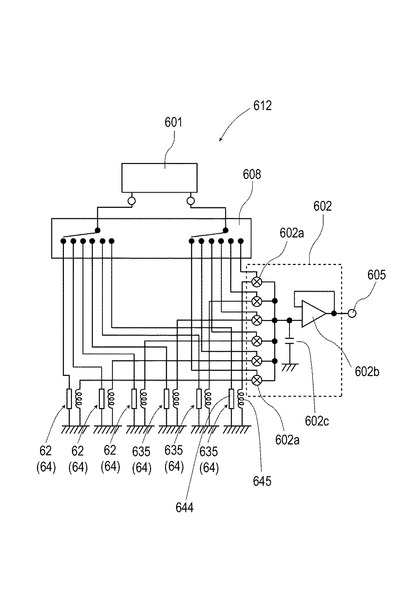
上記制御回路612は、図5及び図6に示すごとく、6基の磁気検出素子64を制御するように構成した回路である。制御回路612は、感磁体644に入力するパルス電流を生成する信号発生器601と、検出コイル645の誘起電圧に応じた計測信号を出力する信号処理部602とを含んでいる。信号発生器601は、所定ののパルス電流を生成すると共に、パルス電流の立ち下がりに同期したトリガー信号を、信号処理部602のアナログスイッチ602aに向けて出力する。
【0068】
信号処理部602は、図6に示すごとく、いわゆるピークホールド回路として機能する同期検波回路と、増幅器602bとを組み合わせたものである。同期検波回路は、検出コイル645と信号処理部601との間の電気的な接続を上記トリガー信号に同期してオンオフするアナログスイッチ602a、及びこのアナログスイッチ602aを介して検出コイル645と接続したコンデンサ602cを用いて構成した回路である。
【0069】
制御回路612は、信号発生器601と各感磁体644との間の電気経路及び、信号処理部602と各検出コイル645との間の電気経路を切り替える電子スイッチ608を設けてある。これにより、X軸、Y軸、Z軸(図1参照)の各軸に沿う磁界の強度を計測する3基の磁気検出素子64(磁気センシング手段62)、及びX軸、Y軸、Z軸の各軸に沿う加速度を計測する3基の磁気検出素子64(磁気検出ヘッド635)の合計6基の磁気検出素子64について、所定の時間毎の切り替えによる制御回路612の時分割共用を可能としている。
【0070】
ここで、本例の磁気検出素子64による磁気検出方法について、簡単に説明しておく。本例の磁気検出方法は、感磁体644に通電したパルス電流の立ち下がり時に、検出コイル645に発生する誘起電圧を計測するというものである。磁界中に置かれた感磁体644に通電したパルス電流が遮断された瞬間、磁界のうち感磁体644の長手方向成分に比例した大きさの誘起電圧が検出コイル645の両端に発生する。本例の制御回路612では、検出コイル645の誘起電圧が、上記トリガー信号によりONとされたアナログスイッチ602aを介してコンデンサ602cに蓄積され、さらに、増幅器602bで増幅されて出力端子605から出力される。
本例の各磁気検出素子64は、以上のように、感磁体644の長手方向に作用する磁界の強度に応じた出力信号を、制御回路612を介して外部に出力する。
【0071】
次に、本例の携帯電話機1の経路案内を利用するための操作手順及び、経路案内動作について、図7〜図11を用いて説明する。図7は、携帯電話機1による経路案内処理の流れを示すフロー図である。図8は、歩行速度等を算出する手順を示すフロー図である。図9は、歩行進行方位を検出する処理の流れを示している。図11は、自律航法による現在地点の測位処理の流れを示すフロー図である。
【0072】
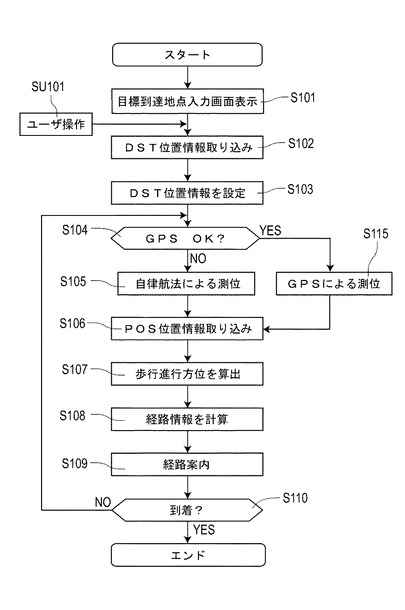
まず、ステップS101では、目標到達地点を入力するための地図を液晶ディスプレイ14に表示する。具体的には、ROM31から地図データを読み出し、液晶ディスプレイ14に表示する。使用者は、ステップSU101のごとく、液晶ディスプレイ14上にオーバーレイ表示された十字カーソル140(図4参照。)を目標到達地点に一致させるよう、液晶ディスプレイ14上で地図をスクロールさせる。そして、十字カーソル140により地図上の目標到達地点を選択することで、目標到達地点を入力できる。
【0073】
続くステップS102では、地図データ中の緯度経度データを参照し、目標到達地点の位置情報であるDST位置情報を得る。そして、ステップS103では、そのDST位置情報をRAM32に格納する。
【0074】
ステップS104では、GPSによる測位が可能であるか否かを判断する。GPSによる測位が可能な場合には、ステップS115のごとくGPSによる測位により、現在地の位置情報を算出する。GPSによる測位が不可能な場合には、ステップS105のごとく、自律航法による測位により、現在地点の位置情報を算出する。なお、自律航法による測位の手順については、図11に示すフロー図を用いて後述する。
【0075】
ステップS106では、GPSあるいは自律航法の測位による現在地点の位置情報であるPOS位置情報を取り込みする。ステップS107では、歩行者(使用者)の前進方向の方位である歩行進行方位を検出する。なお、歩行進行方位を算出する手順については、図9に示すフロー図を用いて後述する。そして、ステップS108では、目標到達地点に至るための経路情報として、歩行進行方位を基準とした相対的な進路方向、及び目標到達地点までの進路距離を計算する。ステップS109では、ステップS108で計算した経路情報に基づいて 経路案内を実施する。
【0076】
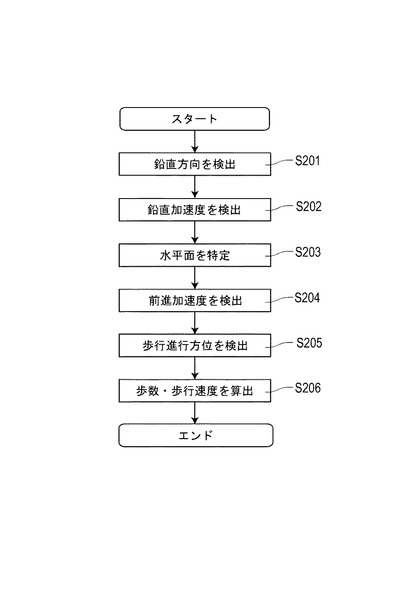
次に、歩行速度等を算出する手順について、図8を用いて説明する。ここでは、まず、ステップS201のごとく、6Dセンサ6により計測した加速度に基づいて、携帯電話機1の鉛直方向を検出する。ステップS202では、その鉛直方向の加速度である鉛直加速度を検出する。ステップS203では、上記鉛直方向に直交する水平面を特定する。
【0077】
続いて、ステップS204及びステップS205のごとく歩行者(使用者)の前進加速度を検出すると共に、歩行進行方位を検出する。ステップS206では、前進加速度に基づいて単位時間当たりの歩数を算出すると共に、単位時間当たりの歩数に歩幅データを掛け合わせることで歩行速度を算出する。
【0078】
ここで、ステップS204のごとく、歩行進行方位を検出する手順について、図9及び図10を用いて説明する。
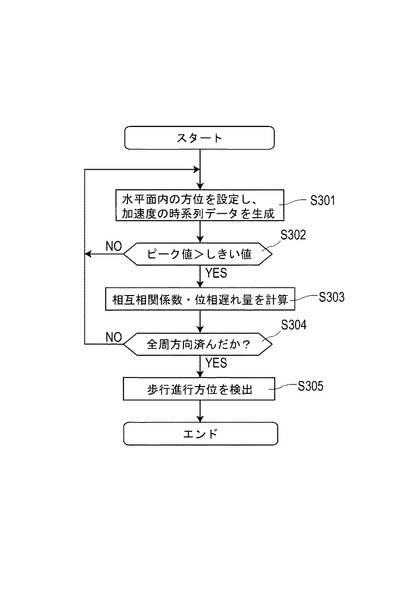
歩行進行方位を生成するに当たっては、まず、ステップS301のごとく、上記鉛直方向に直交する水平面内の方位を変更設定し、その方位における加速度の時系列データを生成する。本例では、過去の所定の時間的区間に渡って記憶した3軸方向の加速度に基づいて、上記水平面内の任意の方位の加速度の時系列データを生成可能としてある。
【0079】
続くステップS302では、加速度の時系列データのピーク値が所定のしきい値を超えるか否かを判断した。本例では、予め設定されたしきい値を超えるピーク値を含む加速度の時系列データを候補とし、それ以外の場合には方位を変更設定して、次の加速度の時系列データを生成した(ステップS301)。なお、上記のしきい値としては、学習により求めた使用者毎に最適なしきい値を設定することも良い。
【0080】
ステップS303では、加速度の時系列データと、鉛直加速度の時系列データについて、相互相関係数、及び相互相関係数が最大となる位相遅れ量を計算した。そして、ステップS304のごとく、以上のような処理ステップを、上記水平面内における全周に渡って実施した。本例では、ステップS305のごとく位相遅れ量が変動周期の0〜15%以内であって、かつ、相互相関係数が最大となる方位を歩行進行方位として検出した。
【0081】
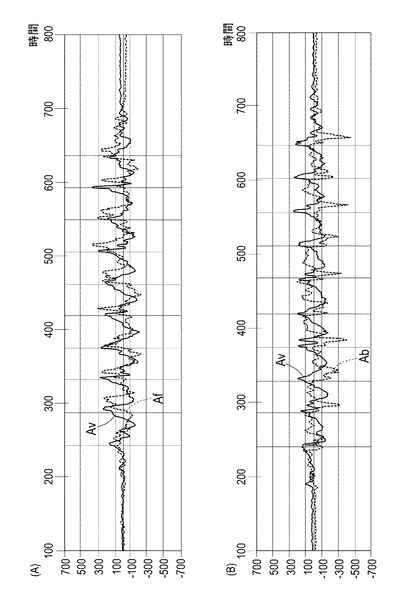
この検出方法の根拠は、図10のグラフを用いて説明可能である。同図(A)は、鉛直加速度Av及び前進加速度Afの時系列的な変動を示すグラフである。そして、同図(B)は、鉛直加速度Avと、歩行進行方位から180度ずれた方位の加速度Abとを参考として示すグラフである。なお、図10では、時間を横軸に規定し、加速度と比例関係を呈する加速度センシング手段63の計測値を縦軸に規定してある。
【0082】
同図(A)から知られるように、前進加速度Afは、鉛直加速度Avに対して所定の範囲内の位相遅れを保ちながら、鉛直加速度Avと同様の変動周期で変動している。そして、発明者らの長期間に渡って蓄積した実験データに基づけば、大多数のサンプルについて、鉛直加速度Avに対する前進加速度Afの位相遅れが、変動周期の0%〜15%の範囲に属している。一方、歩行進行方位から180度ずれた方位、すなわち逆方向の方位では、正負反転した加速度Abが生じている。この加速度の変動波形は、鉛直加速度Avの位相を180度ずらした波形と近似している。それ故、相互相関係数が高いことのみをもって歩行進行方位を検出しようとすると、上記逆方向の方位を誤検出するおそれがある。そこで、本例では、歩行進行方位の検出条件として、鉛直加速度Avとの位相差が変動周期の0〜15%以内である加速度が生じていることを設定してある。
【0083】
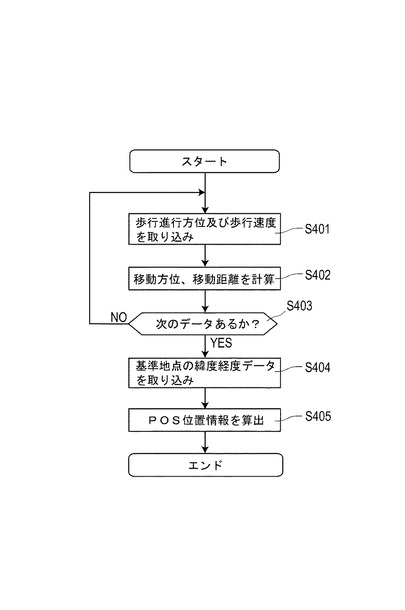
次に、自律航法による測位によりPOS位置情報を算出する処理について、図11を用いて説明する。このフロー図は、緯度経度データが既知の基準地点に基づいて、当該基準地点を通過後の移動距離及び移動方位を自律航法により算出し、POS位置情報を算出する手順を示している。
【0084】
ここでは、まず、ステップS401のごとく、基準地点を通過後、現在までの歩行進行方位及び歩行速度の時系列データに基づき、各データを古いものから順番に取り込む。そして、ステップS402のごとく、取り込みした歩行進行方位及び歩行速度に基づいて、移動方位及び移動距離を累積的に算出する。以上の処理を、ステップS403のごとく上記時系列データに属する全てのデータについて実施し、基準地点を通過後の移動方位及び移動距離を算出する。
【0085】
ステップS404のごとく取り込みした基準地点の緯度経度データに基づいて、ステップS405のごとく現在地点の位置情報であるPOS位置情報を算出する。ここでは、基準地点を元にして、ステップS402で算出した移動方位に移動距離だけ移動した地点を現在地点とし、この地点の緯度経度データを上記POS位置情報として算出する。
【0086】
以上のように、本例の携帯電話機1によれば、鉛直加速度を利用して歩行前進方位と前進加速度を検出でき、鉛直加速度及び前進加速度に共通する変動周期に基づいて歩行速度を算出し得る。この携帯電話機1による経路案内では、歩行前進方位や歩行速度を算出するに当たって、誤差を増幅するおそれがある積分演算を実施していない。それ故、本例の携帯電話機1によれば、自律航法により高精度な経路案内が可能である。
【0087】
特に、本例の携帯電話機1によれば、その向きや姿勢に関わらず、当該携帯電話機1を中心とした絶対方位と、当該絶対方位における歩行進行方位とを検出し得る。したがって、この携帯電話機1によれば、ポケットに入れたままであっても、どのような向きや姿勢の状態でも経路案内を実施し得る。
さらに、本例の携帯電話機1によれば、使用者は、該携帯電話機1を手にして液晶ディスプレイ14を見ながら経路案内を受けることもできる。本例の携帯電話機1によれば、歩行進行方位を検出可能であるため、使用者が手にする携帯電話機1の向きに関わらず、前進方向を液晶ディスプレイ14の上側にして地図を表示する、いわゆるヘディングアップ表示を実施可能である。
【0088】
なお、本例は、GPSによる測位手段を有する携帯電話機1の例であるが、このGPSによる測位手段を省略することも可能である。本例で説明した自律航法による測位手段によれば、自律航法により現在地点を測位でき、経路案内を実施することが可能である。
また、本例の携帯電話機1に基づいて、地図を表示する機能を省略することも可能である。音声案内による経路案内によれば、携帯電話機1をポケットに収容したままの歩行者(使用者)に対しても経路案内を実施し得る。特に、本例の携帯電話機1は、歩行者に形態される際の向きや姿勢に関わらず、曲がる方向や進む方向などの経路案内を正しく実施し得る。
【0089】
さらになお、本例の携帯電話機1における無線通信機能を省略することもできる。無線通信機能を持たない経路案内装置1であっても良い。無線通信機能に代えて、スケジューラー等の機能を持たせれば、経路案内機能を備えたPDA端末として構成することができる。なお、無線通信機能を備えた本例の携帯電話機1によれば、地図データや、地図上で指定した地点の緯度経度データを外部サーバーからダウンロードすることも可能である。
【0090】
(実施例2)
本例は、実施例1の携帯電話機を基にして、経路計算手段を追加した例である。この内容について、図12を用いて説明する。
本例の携帯電話機1では、上記経路計算手段を追加するに当たって、経路計算に必要な道路接続データをROM31(図2参照。)格納すると共に、目標到達地点設定手段の構成を変更してある。そして、本例の地点入力手段は、経路案内を開始する原出発地点と、最終目的地点を入力するように構成してある。
【0091】
道路接続データは、地図データ中の道路の接続関係を表すデータである。例えば、A通りに関する道路接続データとしては、B交差点でC通りと交差、D交差点でE通りと交差・・・等、他の道路との接続関係を表すデータを設定してある。
経路計算手段は、道路接続データを利用して、上記原出発地点から最終目的地点に至る最適な経路を計算する手段である。経路計算手段は、原出発地点から最終目的地点に至る経路中に、経由地点1、経由地点2、経由地点3・・・・を必要に応じて計算する。経由地点は、例えば、曲がり角や、ランドマークとなり得る建物や構造物等の地点を設定する。
【0092】
そして、本例の経路案内手段は、隣り合う経由地点等で挟まれた経路区間単位で経路案内を実施する。すなわち、本例の経路案内手段は、上記経路区間毎に実施例1と同様の経路案内を実施する。目標到達地点設定手段は、通過直後の経由地点あるいは原出発地点を経路区間の始点である出発地点として設定し、経路中の次の経由地点あるいは最終目的地点を経路区間の終点である目標到達地点として設定するように構成してある。
【0093】
なお、上記の経路計算手段としては、携帯電話機1の無線通信機能を利用して通信可能な状態で接続し得る外部サーバーに設けることもできる。例えば、出発地点と最終目的地点の緯度経度データを外部サーバーに送信すると共に、外部サ−バ−の経路計算手段が計算した経由地点のデータを受信するように構成することができる。
【0094】
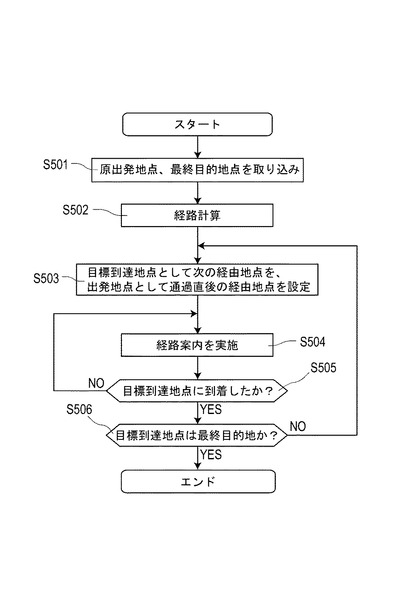
本例の携帯電話機1は、図12のフローチャートに沿って経路案内を実施する。まず、ステップS501のごとく、原出発地点及び最終目的地点を取り込む。ステップS502では、最終目的地点に至る最適な経路を計算により求める。この経路とは、原出発地点から最終目的地に至るまでに経由すべき経由地点を設定することにより規定されるものである。
【0095】
続くステップS503では、目標到達地点として次の経由地点を設定すると共に、出発地点として通過直後の経由地点を設定する。そして、目標到達地点に到着するまでの間、ステップS504のごとく経路案内を実施する。この経路案内は、出発地点として設定した経由地点等から、目標到達地点として設定した経由地点等に到着するためのものである。ステップS505のごとく目標到達地点に到着した場合には、ステップS503のごとく次の経由地点を新たな目標到達地点として設定すると共に、到着した経由地点を新たな出発地点として設定する。ここで、最後の経由地点を到着した場合には、最終目的地点を目標到達地点として設定する。その後、ステップS506のごとく最終目的地点に到着したら、経路案内を終了する。
【0096】
以上のように、本例の携帯電話機1は、最終目的地へ到達するための最適な経路を誘導する経路案内機能を有している。
なお、その他の構成及び作用効果については実施例1と同様である。
【0097】
(実施例3)
本例は、実施例1の携帯電話機1を基にして、第3の加速度検出手段と操作変換手段を追加したものである。
第3の加速度検出手段は、使用者が携帯電話機1を手でたたく、加振操作により発生する加速度を検出する手段である。携帯電話機1を直接または間接的に手でたたく際には、歩行等に生じる加速度と比べて急峻に立ち上がる加速度が発生し得る。上記第3の加速度検出手段は、加速度の急激な立ち上がりを検出するように構成したものである。具体的には、所定の周波数を超える加速度の変化を検出する。
【0098】
操作変換手段は、上記第3の加速度検出手段で検出した使用者の加振操作を元にして、携帯電話機1の制御信号に変換する手段である。本例では、携帯電話機1の制御信号、すなわち操作コマンドとして、音声案内の実行、経路案内の一時停止、経路案内の中止の各コマンドを設定した。そして、音声案内の実行のコマンドに対しては、「ぽん、ぽん」という2度の加振操作を対応付けした。経路案内の一時停止のコマンドに対しては、「ぽん、ぽっぽん」という後半の2度の間隔を短くした3度の加振操作を対応付けした。経路案内の中止のコマンドに対しては、「ぽん、ぽん、ぽん」という略一定間隔の3度の加振操作を対応付けた。操作変換手段は、加振操作の種類を判別して、制御信号である操作コマンドに変換する。
【0099】
以上のように、本例の携帯電話機1によれば、ポケットやかばんに入れたままで経路案内中の操作が可能である。
なお、その他の構成及び作用効果については実施例1と同様である。
【図面の簡単な説明】
【0100】
【図1】実施例1における、携帯電話機の経路案内機能のシステム構成を説明するブロック図。
【図2】実施例1における、携帯電話機のシステム構成を説明するブロック図。
【図3】実施例1における、携帯電話機の仕様状態を示す斜視図(一部断面図。)。
【図4】実施例1における、液晶ディスプレイに表示された地図を示す正面図。
【図5】実施例1における、6Dセンサを示す斜視図。
【図6】実施例1における、制御回路の構成を説明する回路図。
【図7】実施例1における、経路案内の手順を説明するフロー図。
【図8】実施例1における、歩数、歩行速度の算出手順を説明するフロー図。
【図9】実施例1における、歩行進行方位の検出手順を示すフロー図。
【図10】実施例1における、鉛直加速度及び前進加速度の時間的な変動を示すグラフ。
【図11】実施例1における、自律航法による現在地点の測位手順を説明するフロー図。
【図12】実施例2における、経路案内の手順を説明するフロー図。
【符号の説明】
【0101】
1 経路案内装置(携帯電話機)
14 液晶ディスプレイ
2 CPU
20 経路案内手段
21 方位検出手段
22 鉛直方向検出手段
231 第1の加速度検出手段
232 第2の加速度検出手段
24 進行方向検出手段
25 歩行速度算出手段
26 歩数検出手段
27 目標到達地点設定手段
28 現在地点測位手段
29 経路情報計算手段
5 GPS測位手段
52 GPS測位部
6 6Dセンサ
62 磁気センシング手段
63 加速度センシング手段
64 磁気検出素子
630 磁石体変位ユニット
635 磁気検出ヘッド
【技術分野】
【0001】
本発明は、歩行者に対して経路案内を行う歩行者用の経路案内装置に関する。
【背景技術】
【0002】
従来より、例えば、目的地への経路案内(ナビゲーション)を行う経路案内装置としては、車載用のカーナビゲーション装置や、経路案内機能を備えた携帯電話機やPDAの携帯端末等が知られている。このような経路案内装置としては、例えば、GPS(Global Positioning System:全地球無線側位システム)を利用して現在地点を測位するものがある。しかし、GPSを利用した経路案内装置では、地下鉄構内や建築物内部等、GPS衛星のGPS信号を受信しにくい場所では、現在地点を検知できないおそれがある。
【0003】
GPS衛星等を利用せずに移動方向や移動距離を検出するための技術としては、自律航法技術が知られている。車載装置向けの自律航法技術としては、例えば、地磁気センサと車速センサとを利用したものがある(例えば、特許文献1参照。)。この自律航法技術では、車両の進行軸に略一致するように固定した地磁気センサを利用して車両の進行方向を検出し、車速センサを利用して移動距離を検出している。
【0004】
一方、歩行者が手で持ったり、ポケットに入れて携帯する経路案内装置の場合、車両等とは異なり、携帯される際の経路案内装置自体の姿勢を特定することが難しい。そこで、歩行者向けの装置に適用する自律航法技術としては、例えば、3次元加速度センサが検出する3軸方向の加速度と、3次元地磁気センサが検出する3軸方向の地磁気とに基づいて移動方向や移動距離を算出するものがある(例えば、特許文献2参照。)。この自律航法技術では、例えば、検出した加速度を積分することで移動速度及び移動距離を算出し、検出した地磁気に基づいて移動方向を算出している。
【0005】
しかしながら、上記従来の歩行者用の自律航法による経路案内装置では、次のような問題がある。すなわち、加速度を積分して速度や距離を求める際に誤差が増幅されるおそれがあり、精度の高い経路案内を実施できないおそれがあるという問題がある。
【0006】
【特許文献1】特開平8−327377号公報
【特許文献2】特開2005−283386号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来の問題点に鑑みてなされたものであり、自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る経路案内装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
第1の発明は、出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段と、
上記出発地点を出発した後に生じた上記歩行速度及び上記歩行進行方位を累積することにより、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点への経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置にある(請求項1)。
【0009】
上記第1の発明の歩行者用の経路案内装置は、上記第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、上記第2の3軸方向の加速度を計測する3基の加速度センシング手段とを備えたものである。さらに、上記歩行者用の経路案内装置は、上記加速度センシング手段が計測した上記加速度に基づいて上記鉛直方向を検出する上記鉛直方向検出手段を備えている。該鉛直方向検出手段によれば、当該経路案内装置に対する鉛直方向の向きを検出できる。さらに、上記方位検出手段によれば、上記磁気センシング手段による上記磁界強度と、上気鉛直方向検出手段が検出した上記鉛直方向とに基づいて、上記経路案内装置を中心とした上記絶対方位を検出し得る。ここで、上記絶対方位は、東西南北等、地磁気を基準とした絶対的な方位を意味している。
【0010】
加えて、上記歩行者用の経路案内装置は、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、上記鉛直方向と直交する水平面内で生じた加速度のうち、上記鉛直加速度と変動周期が略同一であって、かつ、所定の範囲内の位相遅れで変動する前進加速度を検出する第2の加速度検出手段とを備えている。当該第2の加速度検出手段は、発明者らの長期間に渡る実験及び実験データの解析等の研究活動を通じて見出した新たな知見に基づいて構成したものである。この新たな知見とは、人間が歩行する際に発生する鉛直方向の加速度と前後方向の加速度とが高い相関を有し、かつ、鉛直方向の加速度と前進方向の加速度との位相差が所定の範囲内にあるというものである。この新たな知見に基づいて構成した上記第2の加速度検出手段によれば、上記鉛直加速度に基づいて上記前進加速度を精度高く検出することが可能となる。そして、上記進行方向検出手段によれば、上記絶対方位における上記前進加速度の発生方位を表す上記歩行進行方位を検出できる。
【0011】
さらに、上記歩行者用の経路案内装置は、上記単位時間当たりに歩行者が歩行した上記歩数を算出する上記歩数算出手段と、当該単位時間当たりの歩数に対して上記歩幅データを乗算することで上記歩行速度を算出する歩行速度算出手段とを備えている。上記歩数算出手段は、上記鉛直方向加速度と上記前進加速度との間に共通する変動周期が、上記歩行者が歩行に際して足を踏み出す周期に一致するという新たな知見に基づいて構成したものである。上記単位時間当たりの歩数に基づけば、上記歩幅データと掛け合わせることで上記単位時間当たりの歩行距離である上記歩行速度を算出できる。このようにして算出した歩行速度は、その算出過程において、積分演算等を一切、必要としない。それ故、上記歩行速度算出手段によれば、積分演算に起因して発生し得る誤差を回避しながら、上記歩行速度を精度高く算出することが可能である。
【0012】
上記歩行者用の経路案内装置の上記現在地点測位手段は、過去の上記歩行速度及び上記歩行進行方位の時系列データを累積することにより上記現在地点を算出する。そして、上記経路情報計算手段は、上記現在地点から上記目標到達地点に至るために前進するべき方位と、上記現在地点における上記歩行進行方位との比較に基づいて上記進路方向を含む上記経路情報を計算する。
【0013】
上記第1の発明の歩行者用の経路案内装置によれば、上記歩行者が歩行する際の上記歩行速度と、その方位である上記歩行進行方位を検出し得る。過去の上記歩行速度及び上記歩行進行方位の時系列データに基づけば、例えば、GPS等の測位手段等に依存することなく、上記現在地点を算出することができる。そして、当該現在地点に到達した時点の上記歩行進行方位を基準とすれば、相対的な上記進路方向を算出することが可能である。ここで、上記歩行進行方位は、上記経路案内装置を中心とした上記絶対方位における絶対的な方位として検出可能である。そのため、上記経路案内装置によれば、上記歩行者が上記経路案内装置を手に持っているか、ポケットの中に入れてあるか、あるいはその向きや姿勢等に関わらず、上記進路方向を案内することが可能である。
【0014】
以上のように上記第1の発明の歩行者用の経路案内装置は、上記第1の3軸方向の磁界強度及び上記第2の軸方向の加速度に基づく自律航法を可能としたものである。この経路案内装置では、加速度の積分演算を前提としていないため、安定性高く経路案内を実施し得る。さらに、この経路案内装置では、上記歩行進行方位を絶対的な方位として算出し得る。そのため、この経路案内装置によれば、上記歩行者が上記経路案内装置を携帯する方法や、携帯する際の向きや姿勢等によらず、安定性高く上記進路方向の案内が可能である。
【0015】
第2の発明は、出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
GPS衛星から受信したGPS信号に基づいて、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点に到達するための経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置にある(請求項3)。
【0016】
上記第2の発明の歩行者用の経路案内装置は、上記第1の発明の経路案内装置における上記現在地点測位手段に代えて、上記GPS信号を利用して上記現在地点を測位するように構成した現在地点測位手段を有している。当該現在地点測位手段によれば、上記GPS信号を利用して精度高く上記現在地点を測位できる。
【0017】
一般に、上記歩行速度は、車の速度等と比べて非常に低速である。そのため、GPS信号を利用して、歩行速度の大きさと方向とを精度高く検出することが困難である。上記第2の発明の歩行者用の経路案内装置によれば、上記第1の発明と同様、自律航法により上記歩行速度と上記歩行進行方位とを精度高く検出し得る。
【0018】
したがって、上記第2の発明の歩行者用の経路案内装置によれば、上記第1の発明と同様、上記歩行者が上記経路案内装置を携帯する方法や、携帯する際の向きや姿勢等によらず、上記進路方向の案内が可能である。
【0019】
第3の発明は、無線通信を介して公衆電話回線に接続可能な携帯電話機であって、
上記第1あるいは上記第2の発明の歩行者用の経路案内装置に、無線通信手段を組み込みしたものであることを特徴とする携帯電話機にある(請求項14)。
【0020】
上記第3の発明の携帯電話機は、上記第1あるいは上記第2の発明の歩行者用の経路案内装置に上記無線通信手段を組み込んだものである。この携帯電話機によれば、使用者の歩行中に精度高く経路案内を実施することができる。特に、上記携帯電話機では、上記第1あるいは上記第2の発明と同様、上記使用者が上記携帯電話を携帯する方法や、携帯する際の向きや姿勢等によらず、上記進路方向の案内が可能である。それ故、上記第3の発明の携帯電話機によれば、例えば、歩行者が体の正面に構えた状態でなくても、安定性高く経路案内を実施できる。すなわち、この携帯電話機では、当該携帯電話機と使用者との相対的な位置関係に関わらず、経路案内を実施できる。
【発明を実施するための最良の形態】
【0021】
上記第1〜上記第3の発明においては、上記第1の3軸と上記第2の3軸とが一致するように上記各磁気センシング手段及び上記各加速度センシング手段を配設することが好ましい。この場合には、上記各手段における演算処理を容易にでき、演算の負担を軽減することができる。
【0022】
また、上記磁気センシング手段としては、ホールセンサ、MRセンサ、フラックスゲートセンサ、MIセンサ等により構成することができる。上記加速度センシング手段としては、ピエゾ抵抗型、静電容量型、磁気方式、熱検知方式によるもの等により構成することができる。
【0023】
また、上記鉛直加速度と上記前進加速度との間の上記所定の範囲内の位相遅れとしては、位相差ゼロ、すなわち位相遅れが存在しない状態をも含んでいる。発明者らの長期間に渡る実験データの蓄積と解析努力とによれば、上記鉛直加速度に対する上記前進加速度の位相遅れ量には個人差が存在している。上記鉛直加速度に対する上記前進加速度差の位相遅れがほとんど存在しない人もいれば、略一定の位相遅れが生じる人もいる。しかるに、上記前進加速度は、上記鉛直加速度の変動に続いて変動し、上記鉛直加速度に対して上記前進加速度の位相が進んでいるような事例はほぼ皆無である。このような事実は、持ち上げた足を前方に運ぶという動作を左右の足で交互に繰り返しながら前進するという人間の歩き方に、その根拠を求めることができる。
【0024】
上記第2の発明においては、上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段とを備えており、
上記現在地点算出手段は、上記POS位置情報を算出する際、上記出発地点の出発後に生じた上記歩行速度及び上記歩行進行方位を利用するように構成してあることが好ましい(請求項4)。
この場合には、上記歩行速度及び上記歩行進行方位を利用して、上記GPS信号に基づいて測位した上記現在地点の精度を高めることができる。
【0025】
また、上記第1あるいは上記第2の発明の歩行者用の経路案内装置は、上記歩幅データを学習するように構成した歩幅学習手段を備えていることが好ましい(請求項2、5)。
この場合には、上記経路案内装置を経路案内に利用するに伴って、上記歩幅データの精度を向上できる。なお、学習データとしては、例えば、上記目標到達地点までの実際の距離と、上記歩行速度に基づいて算出した距離との偏差等を利用することができる。そして、学習が進行して上記歩幅データが実際の寸法に近くなれば、上記歩行速度の算出精度を高めることができ、ひいては、上記経路案内の正確性を向上することが可能になる。
【0026】
上記第1〜第3の発明においては、上記第2の加速度検出手段は、上記鉛直加速度に対する位相遅れが0%以上15%以内である加速度を上記前進加速度として検出するように構成してあることが好ましい(請求項6)。
この場合には、上記鉛直加速度に基づいて上記前進加速度を精度高く検出することができる。多くの場合、上記位相遅れが0%以上15%以内の範囲にあるからである。上記位相遅れが0%未満のマイナス、すなわち上記鉛直加速度よりも上記前進加速度の位相が進んでいることは、人間の歩行方法を鑑みればほぼ皆無であると考え得る。一方、上記歩行進行方位の逆方向では、上記前進加速度の正負を逆転した加速度の変動が発生し得る。この加速度の変動は、上記前進加速度に対して180度、位相をずらした信号波形に近似している。したがって、15%を超える位相遅れを除外すれば、上記のような上記歩行進行方位の逆方向に生じる加速度の変動を誤検出するおそれを抑制できる。
【0027】
また、原出発地点及び最終目的地点を入力するためのユーザI/Fである地点入力手段と、上記原出発地点から上記最終目的地点までの経路中に位置する経由地点を計算する経路計算手段とを有しており、
上記目標到達地点設定手段は、通過直後の上記経由地点あるいは上記原出発地点を上記出発地点として設定すると共に、経路中、次に位置する上記経由地点あるいは上記最終目的地点を上記目標到達地点として設定するように構成してあることが好ましい(請求項7)。
【0028】
この場合には、例えば、原出発地点から最終目的地点に至るまでに経由するべき曲がり角やランドマーク等を上記経由地点に設定することができる。これらの経由地点を順番に上記出発地点あるいは上記目標到達地点として切替設定すれば、実際の道路の構造に即してわかりやすい経路案内を実施し得るようになる。
【0029】
また、上記経路案内手段は、上記目標到達地点への経路を音声案内するように構成してあることが好ましい(請求項8)。
この場合には、上記経路案内装置の表示画面等を見ることなく経路案内を利用できるようになる。それ故、上記経路案内装置によれば、かばんやポケットの中に入れたままでも経路案内を実施し得るようになる。したがって、この場合には、上記経路案内装置の向きや姿勢に関わらず経路案内を実施し得るという上記第1〜第3の発明の作用効果が特に有効となる。
【0030】
また、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることが好ましい(請求項9、10)。
この場合には、上記地図表示手段が表示する上記地図において、上記現在地点を確認できるようになる。歩行者にあっては、上記地図を利用して上記現在地点を確認することにより、不案内な経路を歩行する際に感じるおそれがある不安感等を抑制し得る。
【0031】
また、上記地図表示手段は、上記歩行進行方位が上側に位置するように上記地図を表示するように構成してあることが好ましい(請求項11)。
この場合には、進行方向を上にして上記地図を表示するという、いわゆるヘディングアップ機能により、上記地図を提示できるようになる。ヘディングアップ表示された地図によれば、歩行者は、一層、容易に経路あるいは曲がる方向等を確認できるようになる。特に、上記歩行者用の経路案内装置によれば、絶対的な上記歩行進行方位を検出し得るため、上記経路案内装置の向きや姿勢に関わらず、上記のようなヘディングアップ表示を実現し得る。
【0032】
また、上記各加速度センシング手段が検出する加速度に基づいて上記遊技者が上記経路案内装置に入力した加振操作を検出する第3の加速度検出手段と、該第3の加速度検出手段により検出した上記加振操作を制御信号に変換する操作変換手段とを有し、
上記制御信号に応じて所定の動作を行うように構成してあることが好ましい(請求項12)。
【0033】
この場合には、上記加振操作により上記経路案内装置を操作できるようになる。それ故、例えば、上記経路案内装置を上着のポケットや、かばん等に入れたまま、当該経路案内装置の操作を実施し得るようになる。上記加振操作による操作コマンドとしては、例えば、音声案内の要求コマンドや、経路の再計算や、経路案内の一時停止や終了のコマンド等がある。さらに、複数の操作コマンドを設定した場合には、例えば、上記加振操作の強弱や、回数や、リズム等を利用して、各操作コマンドを区別することが好ましい。
【0034】
また、上記磁気センシング手段は、マグネト・インピーダンス素子を利用して上記磁界強度を計測するように構成したものであり、
上記加速度センシング手段は、作用する加速度に応じて変位する磁石体を含む磁石体変位ユニットと、該磁石体が発生する磁界強度を計測するためのマグネト・インピーダンス素子を含む磁気検出ヘッドとを組み合わせたものであることが好ましい(請求項13)。
【0035】
この場合には、高精度に磁気を計測し得る上記マグネト・インピーダンス素子を利用して上記磁界強度及び上記加速度を高精度に検出できる。高精度に検出した上記磁界強度及び上記加速度に基づけば、一層、精度高く上記歩行速度あるいは上記歩行進行方位を算出できるようになる。高精度な歩行速度、歩行進行方位に基づけば、一層、正確性高く経路案内を実施し得るようになる。
【実施例】
【0036】
(実施例1)
本例は、歩行者用の経路案内装置1に関する例である。この内容について、図1〜図11を用いて説明する。
本例の経路案内装置1は、図1〜図3に示すごとく、出発地点から目標到達地点への経路案内を実施する歩行者用の装置である。
この経路案内装置1は、目標到達地点設定手段27と、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、上記3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、経路案内装置1を中心とした絶対方位を検出する方位検出手段21と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する進行方向検出手段24と、単位時間当たりの歩数を検出する歩数検出手段26と、歩行速度を算出する歩行速度算出手段25と、現在地点測位手段28と、経路情報を計算する経路情報計算手段29と、経路を案内する経路案内手段20とを備えている。
上記経路情報計算手段29は、現在地点から目標到達地点への方位を計算すると共に、当該方位と現在地点における歩行進行方位との比較に基づいて、歩行進行方位を基準とした相対的な進路方向を計算するように構成してある。
以下、この内容について詳しく説明する。
【0037】
本例の経路案内装置1は、図2及び図3に示すごとく、上記の構成に加えて、無線通信を介して公衆電話回線網に接続するための無線通信手段を有している。すなわち、本例の経路案内装置1は、無線通信を介して公衆電話回線網に接続可能な携帯電話機である。以下の説明では、経路案内装置1に代えて携帯電話機1という。
【0038】
本例の携帯電話機1は、図2及び図3に示すごとく、折り畳み可能であって、折り畳んだときに液晶ディスプレイ14及び操作部15が内側に収容される折り畳み式のものである。携帯電話機1は、データ通信用のアンテナを含み、データの変復調を行う送受信部111と、データの送受信を制御する通信制御部11と、表示用の液晶ディスプレイ14と、データ通信等を実施するのに必要な各種演算を行うCPU2と、各種データを記憶するメモリー部31、32(以下、適宜ROM31、RAM32と記載する。)とを有する。また、ユーザI/Fとしては、テンキーボタン150を含む操作部15と、音声通話用のマイク及びスピーカ16と、着信お知らせ用のスピーカ12及びバイブレータ13等とを備えている。
【0039】
本例の携帯電話機1は、図1〜図3に示すごとく、経路案内(ナビゲーション機能)を実施するための構成として、上記のごとく、目標到達地点設定手段27と、3基の磁気センシング手段62と、3基の加速度センシング手段63と、鉛直方向検出手段22と、方位検出手段21と、第1及び第2の加速度検出手段231、232と、進行方向検出手段24と、歩数検出手段26と、歩行速度算出手段25と、現在地点測位手段28と、経路情報計算手段29と、経路案内手段20とを備えている。さらに、本例の携帯電話機1は、地図データを記憶する地図データ記憶手段(本例では、ROM31。)と、当該地図データに基づく地図を表示する地図表示手段(本例では、液晶ディスプレイ14。)とを備えている。
【0040】
まず、上記地図データ記憶手段及び上記地図表示手段について説明する。本例の地図データは、地図を描画するための描画データと、位置情報である緯度経度データとを組み合わせたものである。この地図データによれば、描画データに基づく地図上の各位置について、緯度経度データを参照可能である。地図データ記憶手段(ROM31)は、この地図データを格納する手段である。
【0041】
地図表示手段(液晶ディスプレイ14)は、図3及び図4に示すごとく、地図データ(描画データ)に基づいて視認可能な地図を表示する手段である。地図表示手段は、地図データ記憶手段(ROM31)が記憶する地図データを読み出し、当該地図データに基づく地図を表示する。地図表示手段は、地図の略中央の位置に、十字カーソル140をオーバーレイ表示(重ね合わせ表示)するように構成してある。この十字カーソル140を地図中で移動させるように操作すれば、液晶ディスプレイ14上で地図をスクロールさせることができる。さらに、この十字カーソル140が位置する地図上の位置を選択することにより、例えば、目標到達地点等、特定の地点の入力が可能である。本例の地点入力手段は、上記のごとく、十字カーソル140を利用して、地図上の特定の地点を選択することで、地点を入力できるように構成した手段である。なお、使用者が、目標到達地点の緯度経度データを直接、入力するように地点入力手段を構成することもできる。さらには、住所番地や電話番号等を入力することで、目標到達地点を入力しても良い。この場合には、住所番地や電話番号や施設名称等と、緯度経度データ等の位置情報とを対応付けるリンクデータをROM31に格納しておくことが好ましい。
【0042】
上記目標到達地点設定手段27は、図1、図3及び図4に示すごとく、経路案内の対象である目標到達地点の位置情報であるDST位置情報を設定する手段である。本例の携帯電話機1の使用者は、上記のごとく、目標到達地点として入力したい地点に十字状のカーソル140を合わせて選択するという操作により、目標到達地点を入力し得る。目標到達地点設定手段27は、十字カーソル140が位置する地図上のポイントの緯度経度データを参照し、DST位置情報として設定する。
【0043】
上記鉛直方向検出手段22は、図1及び図3に示すごとく、上記3基の加速度センシング手段63が計測した加速度に基づいて、携帯電話機1の鉛直方向を検出する手段である。本例の鉛直方向検出手段22では、鉛直方向を検出するに当たって、計測された加速度に対して周波数解析を適用してその直流成分を抽出している。加速度の直流成分は、重力加速度等、静的に作用する加速度に起因するものである。それ故、加速度の直流成分に基づけば、前進加速度等、動的に発生する加速度に関わらず、携帯電話機1の鉛直方向を精度高く検出し得る。
【0044】
上記方位検出手段21は、図1及び図3に示すごとく、携帯電話機1を中心とした絶対方位を検出する手段である。この絶対方位とは、地磁気の発生方向を基準とした絶対的な方位である。方位検出手段21は、鉛直方向検出手段22が検出した上記鉛直方向に基づいて、当該鉛直方向に直交する水平面を特定する。そして、3基の磁気センシング手段62による3軸方向の磁界強度に基づいて上記水平面に属する各方向の磁界強度の分布を求め、当該分布に基づいて絶対方位を算出する。
【0045】
第1の加速度検出手段231は、図1及び図3に示すごとく、鉛直方向に作用する加速度を検出する手段である。具体的には、3基の加速度センシング手段63が計測した3軸方向の加速度成分に基づいて、鉛直方向の加速度成分を求め、これを上記鉛直加速度とする。第1の加速度検出手段231は、過去の所定の時間区間内にサンプリングした鉛直加速度の時系列データをRAM32に格納する。
【0046】
第2の加速度検出手段232は、図1及び図3に示すごとく、歩行者の進行方向に作用する前進加速度を検出する手段である。第2の加速度検出手段232は、上記鉛直方向検出手段22が検出した鉛直方向に直交する水平面を特定するように構成してある。第2の加速度検出手段232は、この水平面内に属する方位のうち、予め設定した所定のしきい値を超える加速度のピーク値が検出された方位を検出し、当該方位における加速度の時系列データをRAM32に格納する。さらに、第2の加速度検出手段232は、方位毎の加速度の時系列データのうち、上記鉛直加速度と変動周期が略一致しており、かつ、当該変動周期の0〜15%以内の位相遅れを保ちながら変動する時系列データを検出する。そして、検出できた時系列データの方位に生じる加速度をもって、歩行に伴って発生する前進方向の前進加速度として検出するように構成してある。
【0047】
進行方向検出手段24は、図1及び図3に示すごとく、前進加速度が発生した方位を検出する手段である。進行方向検出手段24は、地磁気に対して前進加速度が発生した絶対的な方位である歩行進行方位を検出する。
歩数検出手段26は、単位時間当たりの歩数を検知する手段である。歩数検出手段26は、上記第1の加速度検出手段231が検出した鉛直加速度と、上記第2の加速度検出手段232が検出した前進加速度とに共通する変動周期の逆数を計算することにより、単位時間当たりの変動サイクル数を算出する。そして、歩数検出手段26は、当該単位時間当たりの変動サイクル数を単位時間当たりの歩数として検出する。
【0048】
歩行速度算出手段25は、図1及び図3に示すごとく、単位時間当たりの歩行距離、すなわち歩行速度を算出する手段である。歩行速度算出手段25は、歩数検出手段26が検出した単位時間当たりの歩数に対して、予め記憶した歩行者の歩幅データを掛け合わせることにより、上記歩行速度を算出する。なお、本例では、上記歩幅データとして、使用者が予め設定した歩幅を利用した。
【0049】
歩幅データを学習するための歩幅学習手段を設けることも良い。例えば、経路案内を実施する際、実際の距離と、歩幅データに基づいて算出した移動距離との偏差が小さくなるように歩幅データを学習すれば、当該歩幅データを実際の歩幅の寸法に近づけることができる。歩幅データの学習がすすめば、一層、精度高く歩行速度あるいは歩行距離を算出できるようになる。
【0050】
現在地点測位手段28は、図1〜図3に示すごとく、自律航法による測位と、GPSによる測位とを選択的に切り替えて現在地点の位置情報であるPOS位置情報を算出する手段である。本例では、POS位置情報として緯度経度データに基づく位置情報を算出している。現在地点測位手段28は、屋内等、GPSの送信電波を受信しにくい状況では自律航法により現在地点を測位し、GPSの送信電波を良好に受信可能な状況ではGPSによる現在地点を測位するように構成してある。
【0051】
GPS測位手段5は、図1及び図2に示すごとく、GPSアンテナ51とGPS測位部52とを有している。GPS測位部52は、3点測量の原理を利用して現在地点を測位するものである。GPS測位部52は、GPSアンテナ51を介して、例えば、4つ以上のGPS衛星のGPS信号を受信し、各GPS衛星との距離を測定する。そして、GPS測位部52は、各GPS衛星との距離に基づいて、現在地点の位置情報であるPOS位置情報を算出する。
【0052】
一方、自律航法による現在地点の測位は、現在地点に到達する過程における歩行速度及び歩行進行方位の時系列データに基づいて実施される。例えば、GPSによる測位が難しいトンネルの中に進入した際には、トンネル進入後に生じた歩行速度及び歩行進行方位の時系列データを累積することにより、トンネル進入後の移動方向及び移動距離を算出し得る。トンネル入り口の緯度経度データに基づけば、上記移動方向及び移動距離に基づいて現在地点の位置情報であるPOS位置情報を精度高く算出し得る。
【0053】
上記経路情報計算手段29は、図1に示すごとく、現在地点から目標到達地点への方位と、現在地点における上記歩行進行方位との比較に基づいて、歩行進行方位を基準とした相対的な進路方向を計算するように構成してある。本例の経路情報計算手段29は、さらに、現在地点から目標到達地点までの距離である進路距離を計算するように構成してある。
【0054】
なお、現在地点から目標到達地点への方位は、POS位置情報とDST位置情報とに基づいて計算可能である。すなわち、この方位は、arctan((POS経度−DST経度)/(POS緯度−DST緯度))として求められる。ここで、POS緯度、POS経度は、POS位置情報のうちの緯度データ、経度データであり、また、DST緯度、DST経度は、DST位置情報のうちの緯度データ、経度データである。
【0055】
経路案内手段20は、図1及び図2に示すごとく、背面スピーカ12を利用して経路情報を音声案内する手段である。この経路案内手段20によれば、携帯電話機1をポケットやかばんに入れたまま、経路案内を利用し得る。音声による経路案内としては、「左に曲がってください。」とか、「そのまままっすぐ100m先です。」等の経路案内が考えられる。
【0056】
次に、互いに直交する3軸方向の磁界強度及び加速度を計測する6Dセンサ6について、図2、図3及び図5を用いて説明する。6Dセンサ6は、上記3基の加速度センシング手段63及び上記3基の磁気センシング手段62を一体的にモジュール化したものである。
各磁気センシング手段62は、地球の磁気である地磁気及び地磁気によって生じる磁場を検出する磁気検出素子64を備えている。
各加速度センシング手段63は、加速度に応じて磁石体631が変位するように構成した磁石体変位ユニット630と、磁石体631の変位を検知する磁気検出ヘッド635とからなる。この磁気検出ヘッド635は、磁気センシング手段62と同じ仕様の磁気検出素子64を備えている。
【0057】
6Dセンサ6は、図3及び図5に示すごとく、3基の磁気センシング手段62と、3基の加速度センシング手段63と、これらの手段が含む6個の磁気検出素子64を制御する1個の制御回路612(制御ICチップ)とを共通基板613に実装したものである。なお、本例では、共通基板613の外縁をなす直交2辺に沿ってX軸及びY軸を規定し、基板613の法線方向に沿ってZ軸を規定してある。
【0058】
磁気センシング手段62としては、図3及び図5に示すごとく、X軸方向の磁界強度を計測する磁気センシング手段62Xと、Y軸方向の磁界強度を計測する磁気センシング手段62Yと、Z軸方向の磁界強度を計測する磁気センシング手段62Zとの3基がある。各磁気センシング手段62は、磁気検出素子64を用いて構成してある。本例の磁気検出素子64は、マグネト・インピーダンス素子(MI素子)よりなる。MI素子の磁気計測原理等については、後で説明する。
【0059】
加速度センシング手段63としては、図3及び図5に示すごとく、X軸方向の加速度を計測する加速度センシング手段63Xと、Y軸方向の加速度を計測する加速度センシング手段63Yと、Z軸方向の加速度を計測する加速度センシング手段63Zとの3基がある。各加速度センシング手段63は、作用する加速度に応じて磁石体631が変位するように構成した磁石体変位ユニット630と、磁気検出ヘッド635とを組み合わせたものである。ここで、磁気検出ヘッド635は、上記磁気センシング手段62と同様、MI素子よりなる磁気検出素子64を利用して構成してある。
【0060】
磁石体変位ユニット630は、図5に示すごとく、共通基板613に固定した支持ポスト633と、該支持ポスト633に一方の端部を支持されていると共に他端に磁石体631を保持するカンチレバー634とよりなる。カンチレバー634は、材質Ni−Pよりなる略矩形板状のものである。本例のカンチレバー634は、その一端を支持ポスト633に固定してなり、支持ポスト633を中心として回動するよう弾性的に変形し得る。本例のカンチレバー634では、加速度に対する磁石体631の変位量を大きく確保できるよう、支持ポスト633側の付け根部分から自由端の手前に至る位置にかけて長孔634Hを設けてある。
【0061】
カンチレバー634は、図3及び図5に示すごとく、略矩形板状の厚さ方向に作用する加速度に応じて撓むように構成してある。X軸方向の加速度を検出する加速度センシング手段63Xのカンチレバー634は、X軸方向の撓みを生じる。Y軸方向の加速度を検出する加速度センシング手段63Yのカンチレバー634は、Y軸方向の撓みを生じる。Z軸方向の加速度を検出する加速度センシング手段63Zのカンチレバー634は、Z軸方向の撓みを生じる。
【0062】
磁石体631は、図5に示すごとく、カンチレバー634の自由端側の端部に配設してある。本例の磁石体631は、カンチレバー634の表面に塗布した磁石体塗料の乾燥、硬化後の着磁により形成したものである。磁石体631は、カンチレバー634の撓みに応じて変位する。なお、このカンチレバー634の撓みや自由端の変位は微少であり、例えば、カンチレバー634の自由端の変位は、カンチレバー634の長さの10分の1程度以下である。
【0063】
磁気検出ヘッド635は、図5に示すごとく、カンチレバー634の自由端側の先端面に対向するように配設してある。磁気検出ヘッド635は、上記磁気センシング手段62と同一仕様の磁気検出素子64よりなる。本例では、上記のごとく、磁気検出素子64として、マグネト・インピーダンス素子を採用している。
【0064】
ここで、マグネト・インピーダンス素子について説明する。マグネト・インピーダンス素子は、図5に示すごとく、アモルファスワイヤよりなる感磁体644と、該感磁体644に外挿するように配置した略円筒状の検出コイル645とを組み合わせたものである。このマグネト・インピーダンス素子は、周辺磁界の強度に応じてインピーダンスが変化するという、アモルファスワイヤよりなる感磁体644が発揮するMI(Magneto−impedance)現象を利用したものである。MI現象は、供給する電流方向に対して周回方向に電子スピン配列を有する磁性材料からなる感磁体644に生じる現象である。
【0065】
マグネト・インピーダンス素子よりなる本例の磁気検出素子64は、アモルファスワイヤよりなる感磁体644の通電電流を急激に変化させたときの電子スピン方向の変化に伴う感磁体の内部磁化及びインピーダンス等の変化を、検出コイル645の両端に発生する電圧(誘起電圧)に変換する。この磁気検出素子64は、感磁体644であるアモルファスワイヤの長手方向に磁気検出感度を有している。
【0066】
なお、磁気検出素子64としては、本例のマグネト・インピーダンス素子のほか、ホール素子や、フラックスゲートセンサ、MRセンサ、ピックアップコイル式のもの等、様々な原理のものを採用できる。
【0067】
上記制御回路612は、図5及び図6に示すごとく、6基の磁気検出素子64を制御するように構成した回路である。制御回路612は、感磁体644に入力するパルス電流を生成する信号発生器601と、検出コイル645の誘起電圧に応じた計測信号を出力する信号処理部602とを含んでいる。信号発生器601は、所定ののパルス電流を生成すると共に、パルス電流の立ち下がりに同期したトリガー信号を、信号処理部602のアナログスイッチ602aに向けて出力する。
【0068】
信号処理部602は、図6に示すごとく、いわゆるピークホールド回路として機能する同期検波回路と、増幅器602bとを組み合わせたものである。同期検波回路は、検出コイル645と信号処理部601との間の電気的な接続を上記トリガー信号に同期してオンオフするアナログスイッチ602a、及びこのアナログスイッチ602aを介して検出コイル645と接続したコンデンサ602cを用いて構成した回路である。
【0069】
制御回路612は、信号発生器601と各感磁体644との間の電気経路及び、信号処理部602と各検出コイル645との間の電気経路を切り替える電子スイッチ608を設けてある。これにより、X軸、Y軸、Z軸(図1参照)の各軸に沿う磁界の強度を計測する3基の磁気検出素子64(磁気センシング手段62)、及びX軸、Y軸、Z軸の各軸に沿う加速度を計測する3基の磁気検出素子64(磁気検出ヘッド635)の合計6基の磁気検出素子64について、所定の時間毎の切り替えによる制御回路612の時分割共用を可能としている。
【0070】
ここで、本例の磁気検出素子64による磁気検出方法について、簡単に説明しておく。本例の磁気検出方法は、感磁体644に通電したパルス電流の立ち下がり時に、検出コイル645に発生する誘起電圧を計測するというものである。磁界中に置かれた感磁体644に通電したパルス電流が遮断された瞬間、磁界のうち感磁体644の長手方向成分に比例した大きさの誘起電圧が検出コイル645の両端に発生する。本例の制御回路612では、検出コイル645の誘起電圧が、上記トリガー信号によりONとされたアナログスイッチ602aを介してコンデンサ602cに蓄積され、さらに、増幅器602bで増幅されて出力端子605から出力される。
本例の各磁気検出素子64は、以上のように、感磁体644の長手方向に作用する磁界の強度に応じた出力信号を、制御回路612を介して外部に出力する。
【0071】
次に、本例の携帯電話機1の経路案内を利用するための操作手順及び、経路案内動作について、図7〜図11を用いて説明する。図7は、携帯電話機1による経路案内処理の流れを示すフロー図である。図8は、歩行速度等を算出する手順を示すフロー図である。図9は、歩行進行方位を検出する処理の流れを示している。図11は、自律航法による現在地点の測位処理の流れを示すフロー図である。
【0072】
まず、ステップS101では、目標到達地点を入力するための地図を液晶ディスプレイ14に表示する。具体的には、ROM31から地図データを読み出し、液晶ディスプレイ14に表示する。使用者は、ステップSU101のごとく、液晶ディスプレイ14上にオーバーレイ表示された十字カーソル140(図4参照。)を目標到達地点に一致させるよう、液晶ディスプレイ14上で地図をスクロールさせる。そして、十字カーソル140により地図上の目標到達地点を選択することで、目標到達地点を入力できる。
【0073】
続くステップS102では、地図データ中の緯度経度データを参照し、目標到達地点の位置情報であるDST位置情報を得る。そして、ステップS103では、そのDST位置情報をRAM32に格納する。
【0074】
ステップS104では、GPSによる測位が可能であるか否かを判断する。GPSによる測位が可能な場合には、ステップS115のごとくGPSによる測位により、現在地の位置情報を算出する。GPSによる測位が不可能な場合には、ステップS105のごとく、自律航法による測位により、現在地点の位置情報を算出する。なお、自律航法による測位の手順については、図11に示すフロー図を用いて後述する。
【0075】
ステップS106では、GPSあるいは自律航法の測位による現在地点の位置情報であるPOS位置情報を取り込みする。ステップS107では、歩行者(使用者)の前進方向の方位である歩行進行方位を検出する。なお、歩行進行方位を算出する手順については、図9に示すフロー図を用いて後述する。そして、ステップS108では、目標到達地点に至るための経路情報として、歩行進行方位を基準とした相対的な進路方向、及び目標到達地点までの進路距離を計算する。ステップS109では、ステップS108で計算した経路情報に基づいて 経路案内を実施する。
【0076】
次に、歩行速度等を算出する手順について、図8を用いて説明する。ここでは、まず、ステップS201のごとく、6Dセンサ6により計測した加速度に基づいて、携帯電話機1の鉛直方向を検出する。ステップS202では、その鉛直方向の加速度である鉛直加速度を検出する。ステップS203では、上記鉛直方向に直交する水平面を特定する。
【0077】
続いて、ステップS204及びステップS205のごとく歩行者(使用者)の前進加速度を検出すると共に、歩行進行方位を検出する。ステップS206では、前進加速度に基づいて単位時間当たりの歩数を算出すると共に、単位時間当たりの歩数に歩幅データを掛け合わせることで歩行速度を算出する。
【0078】
ここで、ステップS204のごとく、歩行進行方位を検出する手順について、図9及び図10を用いて説明する。
歩行進行方位を生成するに当たっては、まず、ステップS301のごとく、上記鉛直方向に直交する水平面内の方位を変更設定し、その方位における加速度の時系列データを生成する。本例では、過去の所定の時間的区間に渡って記憶した3軸方向の加速度に基づいて、上記水平面内の任意の方位の加速度の時系列データを生成可能としてある。
【0079】
続くステップS302では、加速度の時系列データのピーク値が所定のしきい値を超えるか否かを判断した。本例では、予め設定されたしきい値を超えるピーク値を含む加速度の時系列データを候補とし、それ以外の場合には方位を変更設定して、次の加速度の時系列データを生成した(ステップS301)。なお、上記のしきい値としては、学習により求めた使用者毎に最適なしきい値を設定することも良い。
【0080】
ステップS303では、加速度の時系列データと、鉛直加速度の時系列データについて、相互相関係数、及び相互相関係数が最大となる位相遅れ量を計算した。そして、ステップS304のごとく、以上のような処理ステップを、上記水平面内における全周に渡って実施した。本例では、ステップS305のごとく位相遅れ量が変動周期の0〜15%以内であって、かつ、相互相関係数が最大となる方位を歩行進行方位として検出した。
【0081】
この検出方法の根拠は、図10のグラフを用いて説明可能である。同図(A)は、鉛直加速度Av及び前進加速度Afの時系列的な変動を示すグラフである。そして、同図(B)は、鉛直加速度Avと、歩行進行方位から180度ずれた方位の加速度Abとを参考として示すグラフである。なお、図10では、時間を横軸に規定し、加速度と比例関係を呈する加速度センシング手段63の計測値を縦軸に規定してある。
【0082】
同図(A)から知られるように、前進加速度Afは、鉛直加速度Avに対して所定の範囲内の位相遅れを保ちながら、鉛直加速度Avと同様の変動周期で変動している。そして、発明者らの長期間に渡って蓄積した実験データに基づけば、大多数のサンプルについて、鉛直加速度Avに対する前進加速度Afの位相遅れが、変動周期の0%〜15%の範囲に属している。一方、歩行進行方位から180度ずれた方位、すなわち逆方向の方位では、正負反転した加速度Abが生じている。この加速度の変動波形は、鉛直加速度Avの位相を180度ずらした波形と近似している。それ故、相互相関係数が高いことのみをもって歩行進行方位を検出しようとすると、上記逆方向の方位を誤検出するおそれがある。そこで、本例では、歩行進行方位の検出条件として、鉛直加速度Avとの位相差が変動周期の0〜15%以内である加速度が生じていることを設定してある。
【0083】
次に、自律航法による測位によりPOS位置情報を算出する処理について、図11を用いて説明する。このフロー図は、緯度経度データが既知の基準地点に基づいて、当該基準地点を通過後の移動距離及び移動方位を自律航法により算出し、POS位置情報を算出する手順を示している。
【0084】
ここでは、まず、ステップS401のごとく、基準地点を通過後、現在までの歩行進行方位及び歩行速度の時系列データに基づき、各データを古いものから順番に取り込む。そして、ステップS402のごとく、取り込みした歩行進行方位及び歩行速度に基づいて、移動方位及び移動距離を累積的に算出する。以上の処理を、ステップS403のごとく上記時系列データに属する全てのデータについて実施し、基準地点を通過後の移動方位及び移動距離を算出する。
【0085】
ステップS404のごとく取り込みした基準地点の緯度経度データに基づいて、ステップS405のごとく現在地点の位置情報であるPOS位置情報を算出する。ここでは、基準地点を元にして、ステップS402で算出した移動方位に移動距離だけ移動した地点を現在地点とし、この地点の緯度経度データを上記POS位置情報として算出する。
【0086】
以上のように、本例の携帯電話機1によれば、鉛直加速度を利用して歩行前進方位と前進加速度を検出でき、鉛直加速度及び前進加速度に共通する変動周期に基づいて歩行速度を算出し得る。この携帯電話機1による経路案内では、歩行前進方位や歩行速度を算出するに当たって、誤差を増幅するおそれがある積分演算を実施していない。それ故、本例の携帯電話機1によれば、自律航法により高精度な経路案内が可能である。
【0087】
特に、本例の携帯電話機1によれば、その向きや姿勢に関わらず、当該携帯電話機1を中心とした絶対方位と、当該絶対方位における歩行進行方位とを検出し得る。したがって、この携帯電話機1によれば、ポケットに入れたままであっても、どのような向きや姿勢の状態でも経路案内を実施し得る。
さらに、本例の携帯電話機1によれば、使用者は、該携帯電話機1を手にして液晶ディスプレイ14を見ながら経路案内を受けることもできる。本例の携帯電話機1によれば、歩行進行方位を検出可能であるため、使用者が手にする携帯電話機1の向きに関わらず、前進方向を液晶ディスプレイ14の上側にして地図を表示する、いわゆるヘディングアップ表示を実施可能である。
【0088】
なお、本例は、GPSによる測位手段を有する携帯電話機1の例であるが、このGPSによる測位手段を省略することも可能である。本例で説明した自律航法による測位手段によれば、自律航法により現在地点を測位でき、経路案内を実施することが可能である。
また、本例の携帯電話機1に基づいて、地図を表示する機能を省略することも可能である。音声案内による経路案内によれば、携帯電話機1をポケットに収容したままの歩行者(使用者)に対しても経路案内を実施し得る。特に、本例の携帯電話機1は、歩行者に形態される際の向きや姿勢に関わらず、曲がる方向や進む方向などの経路案内を正しく実施し得る。
【0089】
さらになお、本例の携帯電話機1における無線通信機能を省略することもできる。無線通信機能を持たない経路案内装置1であっても良い。無線通信機能に代えて、スケジューラー等の機能を持たせれば、経路案内機能を備えたPDA端末として構成することができる。なお、無線通信機能を備えた本例の携帯電話機1によれば、地図データや、地図上で指定した地点の緯度経度データを外部サーバーからダウンロードすることも可能である。
【0090】
(実施例2)
本例は、実施例1の携帯電話機を基にして、経路計算手段を追加した例である。この内容について、図12を用いて説明する。
本例の携帯電話機1では、上記経路計算手段を追加するに当たって、経路計算に必要な道路接続データをROM31(図2参照。)格納すると共に、目標到達地点設定手段の構成を変更してある。そして、本例の地点入力手段は、経路案内を開始する原出発地点と、最終目的地点を入力するように構成してある。
【0091】
道路接続データは、地図データ中の道路の接続関係を表すデータである。例えば、A通りに関する道路接続データとしては、B交差点でC通りと交差、D交差点でE通りと交差・・・等、他の道路との接続関係を表すデータを設定してある。
経路計算手段は、道路接続データを利用して、上記原出発地点から最終目的地点に至る最適な経路を計算する手段である。経路計算手段は、原出発地点から最終目的地点に至る経路中に、経由地点1、経由地点2、経由地点3・・・・を必要に応じて計算する。経由地点は、例えば、曲がり角や、ランドマークとなり得る建物や構造物等の地点を設定する。
【0092】
そして、本例の経路案内手段は、隣り合う経由地点等で挟まれた経路区間単位で経路案内を実施する。すなわち、本例の経路案内手段は、上記経路区間毎に実施例1と同様の経路案内を実施する。目標到達地点設定手段は、通過直後の経由地点あるいは原出発地点を経路区間の始点である出発地点として設定し、経路中の次の経由地点あるいは最終目的地点を経路区間の終点である目標到達地点として設定するように構成してある。
【0093】
なお、上記の経路計算手段としては、携帯電話機1の無線通信機能を利用して通信可能な状態で接続し得る外部サーバーに設けることもできる。例えば、出発地点と最終目的地点の緯度経度データを外部サーバーに送信すると共に、外部サ−バ−の経路計算手段が計算した経由地点のデータを受信するように構成することができる。
【0094】
本例の携帯電話機1は、図12のフローチャートに沿って経路案内を実施する。まず、ステップS501のごとく、原出発地点及び最終目的地点を取り込む。ステップS502では、最終目的地点に至る最適な経路を計算により求める。この経路とは、原出発地点から最終目的地に至るまでに経由すべき経由地点を設定することにより規定されるものである。
【0095】
続くステップS503では、目標到達地点として次の経由地点を設定すると共に、出発地点として通過直後の経由地点を設定する。そして、目標到達地点に到着するまでの間、ステップS504のごとく経路案内を実施する。この経路案内は、出発地点として設定した経由地点等から、目標到達地点として設定した経由地点等に到着するためのものである。ステップS505のごとく目標到達地点に到着した場合には、ステップS503のごとく次の経由地点を新たな目標到達地点として設定すると共に、到着した経由地点を新たな出発地点として設定する。ここで、最後の経由地点を到着した場合には、最終目的地点を目標到達地点として設定する。その後、ステップS506のごとく最終目的地点に到着したら、経路案内を終了する。
【0096】
以上のように、本例の携帯電話機1は、最終目的地へ到達するための最適な経路を誘導する経路案内機能を有している。
なお、その他の構成及び作用効果については実施例1と同様である。
【0097】
(実施例3)
本例は、実施例1の携帯電話機1を基にして、第3の加速度検出手段と操作変換手段を追加したものである。
第3の加速度検出手段は、使用者が携帯電話機1を手でたたく、加振操作により発生する加速度を検出する手段である。携帯電話機1を直接または間接的に手でたたく際には、歩行等に生じる加速度と比べて急峻に立ち上がる加速度が発生し得る。上記第3の加速度検出手段は、加速度の急激な立ち上がりを検出するように構成したものである。具体的には、所定の周波数を超える加速度の変化を検出する。
【0098】
操作変換手段は、上記第3の加速度検出手段で検出した使用者の加振操作を元にして、携帯電話機1の制御信号に変換する手段である。本例では、携帯電話機1の制御信号、すなわち操作コマンドとして、音声案内の実行、経路案内の一時停止、経路案内の中止の各コマンドを設定した。そして、音声案内の実行のコマンドに対しては、「ぽん、ぽん」という2度の加振操作を対応付けした。経路案内の一時停止のコマンドに対しては、「ぽん、ぽっぽん」という後半の2度の間隔を短くした3度の加振操作を対応付けした。経路案内の中止のコマンドに対しては、「ぽん、ぽん、ぽん」という略一定間隔の3度の加振操作を対応付けた。操作変換手段は、加振操作の種類を判別して、制御信号である操作コマンドに変換する。
【0099】
以上のように、本例の携帯電話機1によれば、ポケットやかばんに入れたままで経路案内中の操作が可能である。
なお、その他の構成及び作用効果については実施例1と同様である。
【図面の簡単な説明】
【0100】
【図1】実施例1における、携帯電話機の経路案内機能のシステム構成を説明するブロック図。
【図2】実施例1における、携帯電話機のシステム構成を説明するブロック図。
【図3】実施例1における、携帯電話機の仕様状態を示す斜視図(一部断面図。)。
【図4】実施例1における、液晶ディスプレイに表示された地図を示す正面図。
【図5】実施例1における、6Dセンサを示す斜視図。
【図6】実施例1における、制御回路の構成を説明する回路図。
【図7】実施例1における、経路案内の手順を説明するフロー図。
【図8】実施例1における、歩数、歩行速度の算出手順を説明するフロー図。
【図9】実施例1における、歩行進行方位の検出手順を示すフロー図。
【図10】実施例1における、鉛直加速度及び前進加速度の時間的な変動を示すグラフ。
【図11】実施例1における、自律航法による現在地点の測位手順を説明するフロー図。
【図12】実施例2における、経路案内の手順を説明するフロー図。
【符号の説明】
【0101】
1 経路案内装置(携帯電話機)
14 液晶ディスプレイ
2 CPU
20 経路案内手段
21 方位検出手段
22 鉛直方向検出手段
231 第1の加速度検出手段
232 第2の加速度検出手段
24 進行方向検出手段
25 歩行速度算出手段
26 歩数検出手段
27 目標到達地点設定手段
28 現在地点測位手段
29 経路情報計算手段
5 GPS測位手段
52 GPS測位部
6 6Dセンサ
62 磁気センシング手段
63 加速度センシング手段
64 磁気検出素子
630 磁石体変位ユニット
635 磁気検出ヘッド
【特許請求の範囲】
【請求項1】
出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段と、
上記出発地点を出発した後に生じた上記歩行速度及び上記歩行進行方向を累積することにより、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点への経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項2】
請求項1において、上記歩幅データを学習するように構成した歩幅学習手段を備えたことを特徴とする歩行者用の経路案内装置。
【請求項3】
出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
GPS衛星から受信したGPS信号に基づいて、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点に到達するための経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項4】
請求項3において、上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段とを備えており、
上記現在地点算出手段は、上記POS位置情報を算出する際、上記出発地点の出発後に生じた上記歩行速度及び上記歩行進行方向を利用するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項5】
請求項4において、上記歩幅データを学習するように構成した歩幅学習手段を備えたことを特徴とする歩行者用の経路案内装置。
【請求項6】
請求項1〜5のいずれか1項において、上記第2の加速度検出手段は、上記鉛直加速度に対する位相遅れが0%以上15%以内である加速度を上記前進加速度として検出するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項7】
請求項1〜6のいずれか1項において、原出発地点及び最終目的地点を入力するためのユーザI/Fである地点入力手段と、上記原出発地点から上記最終目的地点までの経路中に位置する経由地点を計算する経路計算手段とを有しており、
上記目標到達地点設定手段は、通過直後の上記経由地点あるいは上記原出発地点を上記出発地点として設定すると共に、経路中、次に位置する上記経由地点あるいは上記最終目的地点を上記目標到達地点として設定するように構成してあることを特徴とする経路案内装置。
【請求項8】
請求項1〜7のいずれか1項において、上記経路案内手段は、上記目標到達地点への経路を音声案内するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項9】
請求項8において、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項10】
請求項1〜7のいずれか1項において、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項11】
請求項9又は10において、上記地図表示手段は、上記歩行進行方位が上側に位置するように上記地図を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項12】
請求項1〜11のいずれか1項において、上記各加速度センシング手段が検出する加速度に基づいて上記遊技者が上記経路案内装置に入力した加振操作を検出する第3の加速度検出手段と、該第3の加速度検出手段により検出した上記加振操作を制御信号に変換する操作変換手段とを有し、
上記制御信号に応じて所定の動作を行うように構成したことを特徴とする歩行者用の経路案内装置。
【請求項13】
請求項1〜12のいずれか1項において、上記磁気センシング手段は、マグネト・インピーダンス素子を利用して上記磁界強度を計測するように構成したものであり、
上記加速度センシング手段は、作用する加速度に応じて変位する磁石体を含む磁石体変位ユニットと、該磁石体が発生する磁界強度を計測するためのマグネト・インピーダンス素子を含む磁気検出ヘッドとを組み合わせたものであることを特徴とする歩行者用の経路案内装置。
【請求項14】
無線通信を介して公衆電話回線に接続可能な携帯電話機であって、
請求項1〜13のいずれか1項に記載の歩行者用の経路案内装置に、無線通信手段を組み込みしたものであることを特徴とする携帯電話機。
【請求項1】
出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段と、
上記出発地点を出発した後に生じた上記歩行速度及び上記歩行進行方向を累積することにより、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点への経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項2】
請求項1において、上記歩幅データを学習するように構成した歩幅学習手段を備えたことを特徴とする歩行者用の経路案内装置。
【請求項3】
出発地点から目標到達地点への経路案内を実施する歩行者用の経路案内装置であって、
上記目標到達地点の位置情報として、上記出発地点からの方位及び距離を特定し得るDST位置情報を設定する目標到達地点設定手段と、
互いに直交する第1の3軸方向の磁界強度を計測する3基の磁気センシング手段と、
上記第1の3軸との相対関係が既知であると共に互いに直交する第2の3軸方向の加速度を計測する3基の加速度センシング手段と、
上記各加速度センシング手段が検出した上記加速度を基にして鉛直方向を検出する鉛直方向検出手段と、
上記各磁気センシング手段が検出した上記磁界強度と、上記鉛直方向検出手段が検出した上記鉛直方向とに基づいて上記経路案内装置を中心とした絶対方位を検出する方位検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段と、
上記各加速度センシング手段が検出した上記加速度に基づいて、上記鉛直方向と直交する水平面内に属する任意方向に生じた加速度のうち、上記鉛直加速度と変動周期が略一致しており、かつ、予め設定した所定の範囲内の位相遅れを保ちながら変動する前進加速度を検出する第2の加速度検出手段と、
上記絶対方位における上記前進加速度の方向を表す歩行進行方位を検出する進行方向検出手段と、
GPS衛星から受信したGPS信号に基づいて、上記歩行者が到達した現在地点の位置情報として、上記出発地点からの方位及び距離を特定し得るPOS位置情報を算出する現在地点測位手段と、
経路情報を計算する経路情報計算手段と、
上記経路情報に基づいて上記目標到達地点に到達するための経路を案内する経路案内手段と、を備えており、
上記経路情報計算手段は、上記POS位置情報と上記DST位置情報とに基づいて上記現在地点から上記目標到達地点への方位を計算すると共に、当該方位と上記現在地点における上記歩行進行方位との比較に基づいて、上記歩行進行方位を基準とした相対的な進路方向を、上記経路情報として計算するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項4】
請求項3において、上記鉛直加速度及び上記前進加速度に共通する上記変動周期の逆数である単位時間当たりの変動サイクル数を当該単位時間当たりの歩数として検出する歩数検出手段と、
上記単位時間当たりの歩数に対して上記歩行者の歩幅データを乗算することにより歩行速度を算出する歩行速度算出手段とを備えており、
上記現在地点算出手段は、上記POS位置情報を算出する際、上記出発地点の出発後に生じた上記歩行速度及び上記歩行進行方向を利用するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項5】
請求項4において、上記歩幅データを学習するように構成した歩幅学習手段を備えたことを特徴とする歩行者用の経路案内装置。
【請求項6】
請求項1〜5のいずれか1項において、上記第2の加速度検出手段は、上記鉛直加速度に対する位相遅れが0%以上15%以内である加速度を上記前進加速度として検出するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項7】
請求項1〜6のいずれか1項において、原出発地点及び最終目的地点を入力するためのユーザI/Fである地点入力手段と、上記原出発地点から上記最終目的地点までの経路中に位置する経由地点を計算する経路計算手段とを有しており、
上記目標到達地点設定手段は、通過直後の上記経由地点あるいは上記原出発地点を上記出発地点として設定すると共に、経路中、次に位置する上記経由地点あるいは上記最終目的地点を上記目標到達地点として設定するように構成してあることを特徴とする経路案内装置。
【請求項8】
請求項1〜7のいずれか1項において、上記経路案内手段は、上記目標到達地点への経路を音声案内するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項9】
請求項8において、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項10】
請求項1〜7のいずれか1項において、地図データを記憶した地図データ記憶手段と、上記地図データに基づいて地図を表示する地図表示手段とを有しており、
上記経路案内手段は、上記地図表示手段が表示する上記地図上に上記現在地点を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項11】
請求項9又は10において、上記地図表示手段は、上記歩行進行方位が上側に位置するように上記地図を表示するように構成してあることを特徴とする歩行者用の経路案内装置。
【請求項12】
請求項1〜11のいずれか1項において、上記各加速度センシング手段が検出する加速度に基づいて上記遊技者が上記経路案内装置に入力した加振操作を検出する第3の加速度検出手段と、該第3の加速度検出手段により検出した上記加振操作を制御信号に変換する操作変換手段とを有し、
上記制御信号に応じて所定の動作を行うように構成したことを特徴とする歩行者用の経路案内装置。
【請求項13】
請求項1〜12のいずれか1項において、上記磁気センシング手段は、マグネト・インピーダンス素子を利用して上記磁界強度を計測するように構成したものであり、
上記加速度センシング手段は、作用する加速度に応じて変位する磁石体を含む磁石体変位ユニットと、該磁石体が発生する磁界強度を計測するためのマグネト・インピーダンス素子を含む磁気検出ヘッドとを組み合わせたものであることを特徴とする歩行者用の経路案内装置。
【請求項14】
無線通信を介して公衆電話回線に接続可能な携帯電話機であって、
請求項1〜13のいずれか1項に記載の歩行者用の経路案内装置に、無線通信手段を組み込みしたものであることを特徴とする携帯電話機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−39619(P2008−39619A)
【公開日】平成20年2月21日(2008.2.21)
【国際特許分類】
【出願番号】特願2006−215123(P2006−215123)
【出願日】平成18年8月7日(2006.8.7)
【出願人】(501034106)アイチ・マイクロ・インテリジェント株式会社 (42)
【Fターム(参考)】
【公開日】平成20年2月21日(2008.2.21)
【国際特許分類】
【出願日】平成18年8月7日(2006.8.7)
【出願人】(501034106)アイチ・マイクロ・インテリジェント株式会社 (42)
【Fターム(参考)】
[ Back to top ]