
歩行者転落監視システム
【課題】駅のプラットホーム上において視覚障害者を自動検知し、線路上に転落した場合でも、被害を未然に回避する。
【解決手段】歩行者位置検知部11で、プラットフォーム上の歩行者位置を検知し、歩行者判定部13で、この検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、ゾーン監視部17で、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始し、落下検知器15で落下物が検知された場合、警報通知部18で、歩行者転落を示す警報を予め設定された通知先へ通知する。
【解決手段】歩行者位置検知部11で、プラットフォーム上の歩行者位置を検知し、歩行者判定部13で、この検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、ゾーン監視部17で、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始し、落下検知器15で落下物が検知された場合、警報通知部18で、歩行者転落を示す警報を予め設定された通知先へ通知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駅プラットホームにおいて、視覚障害者が線路に転落する事故を未然に回避するための歩行者転落監視技術に関する。
【背景技術】
【0002】
視覚障害者の歩行を安全に誘導するために、地面や床面に敷設されている誘導用ブロック(プレート)がある。誘導用ブロックには、平行した線が突起になっていて移動の方向を示す誘導ブロック(線状ブロック)と、格子状の点が突起となっていて注意喚起・警告を促す警告ブロック(点状ブロック)の2種類がある(多くは黄色)。進路が曲がったり、行き止ったりする箇所に警告ブロックが敷き詰められる。
【0003】
駅のプラットホームでは、プラットホームの縁に沿って内側に警告ブロックが埋め込まれ、視覚障害者の警告を促しながら歩行を誘導している。しかし、このような誘導用ブロックが備えられていても、視覚障害者がプラットホームから転落し、直後に進入してきた電車に轢かれる事故が後を絶たない。
【0004】
このような事故に対する最も効果的な対策は、ホームからの転落を防止する、いわゆる「ホームドア」の設置であるが、多大な設置コストの他にも、列車の扉位置の統一や停止位置の精度向上などの問題があり、対策が進んでいない。プラットホームから線路上への転落者が目撃された場合、プラットホームに備えられた「非常通報ベル」を発見者(もしくは、代理者)が押すことによって、非常事態を車両乗務員に知らせるやり方が現状である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−170191号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来技術では、歩行者がプラットホームから転落した事実を発見するのが遅れたり、発見しても「非常通報ベル」が近くに無かったり、どこにあるのか分からなかったりしたため、非常事態の通報が手遅れになる場合がしばしばであった。
視覚障害者がプラットホーム上を歩行していること、およびその転落事象を、現状のような目視でなく、自動的に判別できるようになれば、非常事態の対処も迅速になり、被害を回避することも可能になる。
【0007】
視覚障害者に現在の位置を知らせる方法としては、これまで、誘導用ブロックにICタグを埋め込み、このICタグにGPS装置で取得した位置と周囲の環境情報等とを記録しておき、例えば杖にICタグリーダーを埋め込んで、視覚障害者の利用に供する方法が開示されている(特許文献1など参照)。
しかしながら、この方法は屋外での目的地まで視覚障害者を誘導する場合には適しているが、駅のプラットホーム上ではホームの端が危ないことは既に承知のことであり、本人に位置情報を知らせても課題の解決にはならない。
【0008】
本発明はこのような課題を解決するためのものであり、駅のプラットホーム上において視覚障害者を自動検知し、線路上に転落した場合でも、被害を未然に回避できる歩行者転落監視技術を提供することを目的としている。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明にかかる歩行者転落監視システムは、駅のプラットフォームを歩行する歩行者の位置を検知する歩行者位置検知部と、歩行者位置検知部で検知された検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する歩行者判定部と、歩行者判定部での特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始するゾーン監視部と、落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する警報通知部とを備えている。
【0010】
この際、歩行者位置検知部で、視覚障害者誘導用ブロックに内蔵されて歩行者の踏圧を検出する歩行センサからのセンサ信号に基づき歩行者の位置を検知するようにしてもよい。
【0011】
また、歩行者判定部で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよい。
【0012】
また、ゾーン監視部で、歩行者判定部により判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を表示するようにしてもよい。
【0013】
また、ゾーン監視部で、特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得して画面表示する監視映像表示処理を開始するようにしてもよい。
【0014】
また、ゾーン監視部で、歩行者判定部での特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得し、歩行者判定部で判定した視覚障害者の歩行軌跡とともに、同一画面で表示する監視映像表示処理を開始するようにしてもよい。
【0015】
また、警報通知部で、落下検知器で落下物が検知された場合、列車運行管理システムに対して、当該プラットフォームへの列車進入禁止を通知するようにしてもよい。
【0016】
また、歩行者位置検知部で、視覚障害者誘導用ブロックに内蔵された振動センサから振動検知信号を取得し、歩行者判定部で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定するようにしてもよい。
【発明の効果】
【0017】
本発明によれば、駅のプラットホーム上において視覚障害者を自動検知でき、線路上に転落した場合でも、早期に管理者や駅係員が対応をとることができ、被害を未然に回避することができる。
また、視覚障害者が存在する位置と対応する監視ゾーンを特定し、この特定監視ゾーンに対応する落下検知器のみを起動して、視覚障害者の転落を監視するゾーン監視動作を行うようにしたので、歩行者以外の落下物等の重要でない事象を排除し、視覚障害者の安全のための監視に集中強化し、余計なシステム稼働を回避でき、消費電力などの省エネ効果を得ることができる。
【図面の簡単な説明】
【0018】
【図1】第1の実施の形態にかかる歩行者転落監視システムの構成を示すブロック図である。
【図2】プラットフォームを示す説明図である。
【図3】検知データの構成例である。
【図4】機器管理データの構成例である。
【図5】歩行軌跡の検出過程を示す説明図である。
【図6】歩行軌跡分析画面を示す説明図である。
【図7】センサ信号の連続シークエンスを示す説明図である。
【図8】センサ信号の検出例を示す説明図である。
【図9】歩行軌跡画面を示す説明図である。
【図10】監視映像画面を示す説明図である。
【図11】第1の実施の形態にかかる歩行者転落監視システムの視覚障害者判定処理を示すフローチャートである。
【図12】第1の実施の形態にかかる歩行者転落監視システムの監視ゾーン特定処理を示すフローチャートである。
【図13】第1の実施の形態にかかる歩行者転落監視システムのゾーン監視処理を示すフローチャートである。
【図14】第2の実施の形態にかかる白杖による触擦を伴う歩行軌跡の検出過程を示す説明図である。
【発明を実施するための形態】
【0019】
次に、本発明の実施の形態について図面を参照して説明する。
[第1の実施の形態]
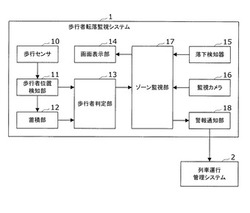
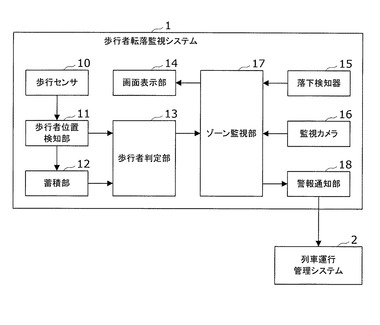
まず、図1を参照して、本発明の第1の実施の形態にかかる歩行者転落監視システム1について説明する。図1は、第1の実施の形態にかかる歩行者転落監視システムの構成を示すブロック図である。
この歩行者転落監視システム1は、駅のプラットフォームに設置されて、プラットフォームを歩行する歩行者について、線路への転落を監視する機能を有している。
【0020】
本実施の形態は、駅のプラットフォームを歩行する歩行者の位置を検知し、この検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、この特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始し、落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知するようにしたものである。
【0021】
次に、図1を参照して、本実施の形態にかかる歩行者転落監視システム1の構成について詳細に説明する。
この歩行者転落監視システム1には、主な機能部として、歩行センサ10、歩行者位置検知部11、蓄積部12、歩行者判定部13、画面表示部14、落下検知器15、監視カメラ16、ゾーン監視部17、および警報通知部18が設けられている。
【0022】
歩行センサ10は、視覚障害者誘導用ブロックBの突起部に内蔵された、例えば圧電素子などの圧力センサからなり、歩行者が突起部を踏圧するとセンサ信号を出力する機能を有している。
歩行者位置検知部11は、歩行センサ10からのセンサ信号に基づいて、駅のプラットフォームを歩行する歩行者の位置を検知する機能と、検知した位置と検知した時刻との組を検知データとして順次蓄積部12へ蓄積する機能とを有している。
【0023】
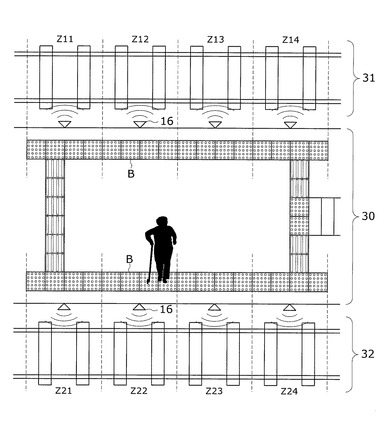
図2は、プラットフォームを示す説明図である。ここでは、プラットフォーム30の両側面に、上り線路31と下り線路32が対向して敷設されている。プラットフォーム30には、視覚障害者誘導用ブロックBが歩行経路に沿って敷設されている。
【0024】
視覚障害者誘導用ブロックBは、通常、正方形のブロック(約30cm×30cm)を連続して配列したものであるが、例えば1ブロックに1つの歩行センサ10を実装して、個別のユニット番号を予め付与し、このブロック上ではどの部分を踏んでも同じユニット番号を示すセンサ信号を発信するよう予め設定する。ただし、歩行センサ10の構成はこれに限らず、例えば進行方向に対して直角(並列)方向に並んだ2つのブロックを合わせて1つの歩行センサ10を構成してもよい。
【0025】
ユニット番号は、連続して配置されたブロックには連続したユニット番号を付与して管理する。こうすることによって、検知されたセンサ信号のユニット番号とブロックの敷設間隔とから、実際の歩行者の誘導用ブロック上の歩行距離を容易に算出できる。
【0026】
図2に示すように、1つのプラットホームには通常、上り下り2路線のホーム端に沿って2本の長い誘導用ブロック線があるので、例えば、総ての歩行センサ10に一意的に異なるユニット番号を付与すれば、ユニット番号からそれが上り下りどちらの車線側のどの辺りにあるかが特定される。なお、上り側、下り側を独立に管理するならば、ユニット番号は片側だけで一意的に付与してもよい。
【0027】
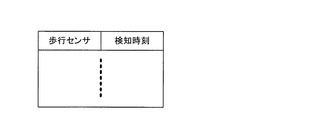
蓄積部12は、歩行者位置検知部11で検知された検知位置とその検知時刻とを、検知データとして順次蓄積する機能を有している。
図3は、検知データの構成例である。ここでは、歩行センサ10のユニット番号からなる検知位置および検知時刻の組が検知データとして蓄積されている。
【0028】
歩行者判定部13は、歩行者位置検知部で検知された検知位置が、プラットフォーム30に敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、さらには当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合、当該歩行者を視覚障害者と判定する機能と、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォーム30を予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する機能とを有している。
【0029】
画面表示部14は、LCDなどの画面表示装置からなり、歩行者判定部13で視覚障害者と判定した歩行軌跡をプロットした歩行軌跡画面や、監視カメラ16で撮影された監視映像などの各種画面を表示する機能を有している。
落下検知器15は、赤外線や超音波を用いた障害物検知センサからなり、プラットフォーム30の線路側面に複数設置されて、プラットフォーム30から線路31,32への落下物を検知する機能を有している。
監視カメラ16は、プラットフォーム30の状況を撮影するカメラである。
【0030】
ゾーン監視部17は、歩行者判定部13での特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始する機能と、特定監視ゾーンの選択に応じて、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始する機能と、歩行者判定部13で判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を画面表示部14で表示する機能と、これら監視映像と歩行軌跡画面とを同一画面で表示する機能とを有している。
【0031】
警報通知部18は、落下検知器15で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する機能と、落下検知器15で落下物が検知された場合、列車運行管理システム2に対して、当該プラットフォームへの列車進入禁止を通知する機能とを有している。
【0032】
プラットフォーム30には、複数の監視ゾーンが分割して設けられており、この監視ゾーンを単位として視覚障害者が監視される。図2の例では、上り線路31に沿って監視ゾーンZ11,Z12,Z13,Z14が設けられており、下り線路32に沿って監視ゾーンZ21,Z22,Z23,Z24が設けられている。
プラットフォーム30の線路側面には、これら監視ゾーンごとに、落下検知器15が設置されている。また、プラットフォーム30の天井や柱には、これら監視ゾーンの状況を撮影する監視カメラ16(図示せず)が設置されている。
【0033】
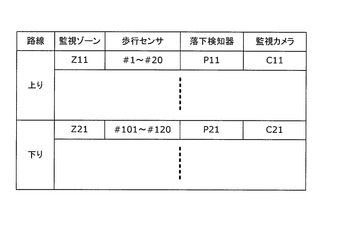
図4は、機器管理データの構成例である。ここでは、監視ゾーンごとに、当該監視ゾーンに設置されている歩行センサ、落下検知器、監視カメラを示す機器IDが組として登録されている。この機器管理データは、記憶部(図示せず)に予め保存されており、必要に応じて各機能部から読み出されて使用される。
【0034】
図5は、歩行軌跡の検出過程を示す説明図である。視覚障害者誘導用ブロックBに沿って、歩行者が時刻T1,T2,T3の順に歩行した場合、これら視覚障害者誘導用ブロックBに内蔵されている歩行センサ#1,#2,#3からセンサ信号V1,V2,V3が出力される。
この際、センサ信号V1,V2,V3には、踏圧されている期間に応じたパルス波形が発生する。したがって、隣接する歩行センサ10のセンサ信号がV1,V2,V3上に、時刻T1,T2,T3の順にパルス波形が現れた場合、歩行軌跡として抽出することができる。
【0035】
図6は、歩行軌跡分析画面を示す説明図であり、横軸が時間を示し、縦軸が歩行センサ位置を示している。この歩行軌跡分析画面は、歩行者判定部13で抽出された歩行軌跡を、時間軸と空間軸の二次元座標にプロットしたものである。
この歩行軌跡分析画面で、視覚障害者誘導用ブロック上の歩行は、傾きを持つ線分(点)で表示される。短い線分41が多数観測されるであろうが、これらは一般歩行者が視覚障害者誘導用ブロック上を踏み歩いた履歴に相当する。傾きは歩く方向と速さによるため、様々である。この歩行軌跡分析画面をゾーン監視部17により画面表示部14で表示することにより、管理者が視覚障害者誘導用ブロック全体における歩行状況を容易に把握できる。
【0036】
ここで、プラットホーム上に視覚障害者が存在すれば、視覚障害者は基本的に視覚障害者誘導用ブロック上を歩行するので、かなり長い線分42として表示される。また、歩行速度はゆっくりなため、線分の傾きは緩やかなことが予想される。
したがって、この歩行軌跡分析画面から、線分の長さ、すなわち歩行距離が基準距離を上回っている場合、当該歩行軌跡が視覚障害者のもの、すなわち当該歩行者が視覚障害者であると判定できる。また、当該歩行軌跡の後端位置から、視覚障害者の位置を特定することができる。
【0037】
図7は、センサ信号の連続シークエンスを示す説明図である。センサ信号を受信したユニット番号の連続したシークエンス(数列)をx〜yとし、センサ設置間隔をΔd(例えば30cm)とした場合、歩行者の視覚障害者誘導用ブロック上の歩行距離Lは、次の式(1)で求められる。
L=Δd×|x−y| …(1)
【0038】
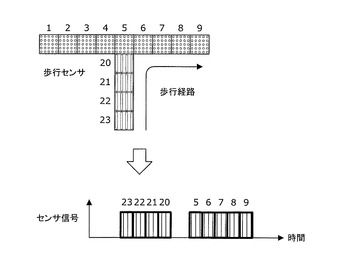
図8は、センサ信号の検出例を示す説明図である。歩行センサ10のユニット番号は、なるべく連続的に付与することが望ましいが、視覚障害者誘導用ブロックが分岐されている場合には、そこで不連続な番号付けに成らざるを得ない。この場合には、不連続な番号付けをして良い。図8では、ユニット番号1〜9の歩行センサ10に対してユニット番号23〜20歩行センサ10が分岐して配置されている。
【0039】
したがって、図8の矢印に沿って歩行者が歩行したとすると、ユニット番号23〜20と、ユニット番号5〜9のセンサ信号が時刻順に検知される。この場合、歩行した全長距離は分岐点で分断されて、リセットされるものとなるが、システム動作上の問題にはならない。
【0040】
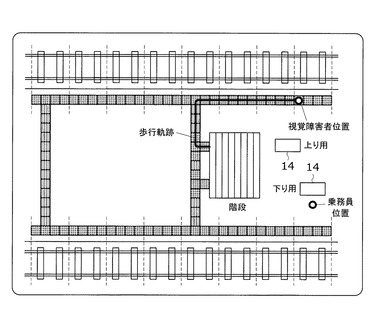
図9は、歩行軌跡画面を示す説明図である。歩行軌跡画面は、予め用意した駅のプラットフォームの平面図に、歩行者判定部13で抽出された視覚障害者の歩行軌跡をプロットしたものである。ここでは、プラットフォーム30のうち、視覚障害者が視覚障害者誘導用ブロック上を歩行した軌跡に加えて、視覚障害者の位置が示されている。この歩行軌跡画面は、管理画面として管理者用の画面表示部14で表示される。この歩行軌跡画面を確認することにより、管理者が視覚障害者の存在や歩行位置を容易に確認することができる。
【0041】
図10は、監視映像画面を示す説明図である。監視映像画面は、視覚障害者の位置と対応する特定監視ゾーンの状況を監視カメラ16で撮影した監視映像を示す画面である。ここでは、監視映像とともに、歩行軌跡画面も、同一画面に表示されている。この監視映像画面は、管理画面として管理者用の画面表示部14で表示してもよいが、プラットフォームに設けてある乗務員用あるいは駅係員用の画面表示部14で表示してもよい。これにより、プラットフォーム30上の視覚障害者の近くに存在する乗務員や駅係員が、視覚障害者の状況を確認でき、すばやい対応をとることができる。
【0042】
また、緊急時に、管理者が、プラットフォーム上の乗務員や駅係員のうち、対象となる視覚障害者の位置に近い乗務員や駅係員に対応指示ができるように、プラットフォーム上の乗務員や駅係員の位置を特定できる一般なRFIDやGPSなどを用いた情報システムと連動させて、そのシステムからの位置情報を利用し、管理者用の画面表示部14にその位置を表示させ、視覚障害者の位置に近い乗務員や駅係員を的確に特定して、指示・連絡を取れるようにしてもよい。
【0043】
[第1の実施の形態の動作]
次に、本実施の形態にかかる歩行者転落監視システム1の動作について説明する。
【0044】
[視覚障害者判定動作]
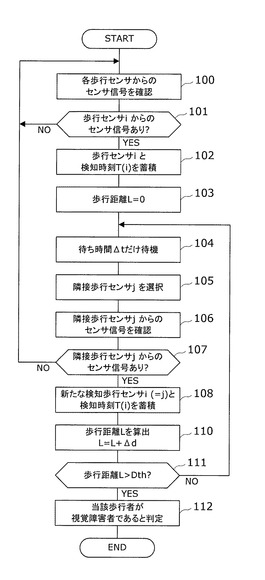
まず、図11を参照して、歩行者転落監視システム1の視覚障害者判定動作について説明する。図11は、第1の実施の形態にかかる歩行者転落監視システムの視覚障害者判定処理を示すフローチャートである。
【0045】
歩行者位置検知部11は、一定周期で各歩行センサ10からのセンサ信号を確認する(ステップ100)。ここで、任意の歩行センサからのセンサ信号が歩行者の検知を示している場合(ステップ101:YES)、検知のあった歩行センサを検知歩行センサiとし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ102)。また、歩行者判定部13は、歩行距離Lをゼロに初期化する(ステップ103)。
【0046】
次に、歩行者位置検知部11は、待ち時間Δtだけ待機した後(ステップ104)、直前に検知した歩行センサiと隣接する歩行センサjを選択し(ステップ105)、隣接歩行センサjからのセンサ信号を確認する(ステップ106)。この際、隣接歩行センサjが複数存在する場合にはこれらすべての隣接歩行センサjについてセンサ信号を確認する。
【0047】
ここで、各隣接歩行センサjからのセンサ信号のすべてにおいて、歩行者の検知を示さない場合(ステップ107:NO)、当該歩行軌跡が視覚障害者誘導用ブロック上から逸れたことから、当該歩行軌跡の歩行者が視覚障害者でないと判定できる。したがって、当該歩行軌跡の追跡を終了して、ステップ100へ戻る。
【0048】
一方、各隣接歩行センサjからのセンサ信号のいずれかが歩行者の検知を示す場合(ステップ107:YES)、歩行者位置検知部11は、検知のあった隣接歩行センサjを新たな検知歩行センサi(i=j)とし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ108)。
【0049】
この後、歩行者判定部13は、歩行距離Lに歩行センサ設置間隔Δdを加算して歩行距離L(L=L+Δd)を更新し(ステップ110)、歩行距離Lと基準距離Lthとを比較する(ステップ111)。
ここで、歩行距離Lが基準距離Lth以下の場合(ステップ111:NO)、ステップ104へ戻り、当該歩行軌跡の追跡を継続する。一方、歩行距離Lが基準距離Lthを上回っている場合(ステップ111:YES)、歩行者判定部13は、当該歩行軌跡の歩行者が視覚障害者であると判定し(ステップ112)、一連の視覚障害者判定処理を終了する。
【0050】
[監視ゾーン特定動作]
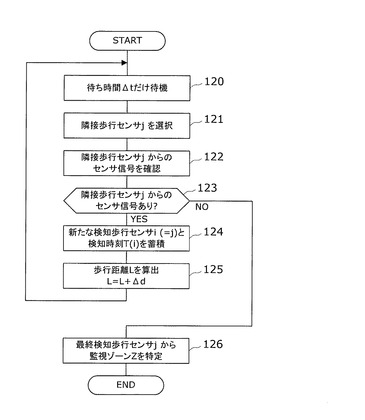
次に、図12を参照して、歩行者転落監視システム1の監視ゾーン特定動作について説明する。図12は、第1の実施の形態にかかる歩行者転落監視システムの監視ゾーン特定処理を示すフローチャートである。
【0051】
歩行者判定部13は、前述した図11の視覚障害者判定処理で、歩行軌跡の歩行者が視覚障害者であると判定した場合、まず、待ち時間Δtだけ待機した後(ステップ120)、直前に検知した歩行センサiと隣接する歩行センサjを選択し(ステップ121)、隣接歩行センサjからのセンサ信号を確認する(ステップ122)。この際、隣接歩行センサjが複数存在する場合にはこれらすべての隣接歩行センサjについてセンサ信号を確認する。
【0052】
ここで、各隣接歩行センサjからのセンサ信号のいずれかが歩行者の検知を示す場合(ステップ123:YES)、検知のあった隣接歩行センサjを新たな検知歩行センサi(i=j)とし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ124)。
また、歩行者判定部13は、歩行距離Lに歩行センサ設置間隔Δdを加算して歩行距離L(L=L+Δd)を更新し(ステップ125)、ステップ120へ戻り、当該歩行軌跡の追跡を継続する。
【0053】
一方、各隣接歩行センサjからのセンサ信号のすべてにおいて、歩行者の検知を示さない場合(ステップ123:NO)、当該歩行軌跡の視覚障害者が歩行を停止したと判定できる。したがって、当該位置を歩行軌跡の終点、すなわち視覚障害者の停止位置と見なすことができ、歩行者判定部13は、前述した図4の機器管理データを参照して、最終歩行センサiが属する監視ゾーンを、視覚障害者が存在する監視ゾーンZとして特定し(ステップ126)、一連の監視ゾーン特定処理を終了する。
【0054】
[ゾーン監視動作]
次に、図13を参照して、歩行者転落監視システム1のゾーン監視動作について説明する。図13は、第1の実施の形態にかかる歩行者転落監視システムのゾーン監視処理を示すフローチャートである。
【0055】
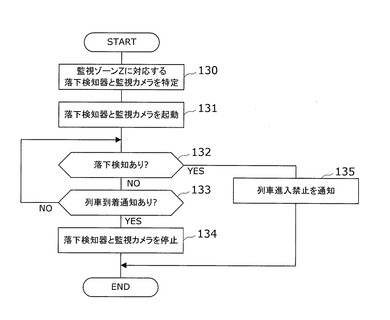
ゾーン監視部17は、前述した図12の監視ゾーン特定処理で、視覚障害者が存在する監視ゾーンZが特定された場合、まず、前述した図4の機器管理データを参照して、監視ゾーンZに対応する落下検知器15と監視カメラ16とを特定し(ステップ130)、特定した落下検知器15と監視カメラを起動する(ステップ131)。
【0056】
これにより、ゾーン監視部17は、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始するとともに、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始する。この際、前述の図9に示したように、歩行者判定部13で判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を画面表示部14で表示するようにしてもよい。また、前述の図10に示したように、これら監視映像と歩行軌跡画面とを同一画面で表示するようにしてもよい。
【0057】
次に、ゾーン監視部17は、落下検知器15からの落下検知の有無を確認し(ステップ132)、落下検知がない場合(ステップ132:NO)、列車到着の有無を確認する(ステップ133)。列車到着については、当該特定監視ゾーンと対応する線路に設けられている各落下検知器15のすべてで、列車を落下物として検知した場合に、列車到着と判定すればよい。また、列車運行管理システム2からの通知により列車到着を判定してもよい。
【0058】
ここで、列車到着通知がない場合には(ステップ133:NO)、ステップ132に戻って、落下検知の確認を継続する。一方、列車到着通知があった場合(ステップ133:YES)、特定監視ゾーンに対応する落下検知器15と監視カメラ16とを停止して(ステップ134)、特定監視ゾーンに関する一連のゾーン監視処理を終了する。
【0059】
また、ステップ132において、落下検知があった場合(ステップ132:YES)、警報通知部18は、特定監視ゾーンと対応する線路への列車進入禁止を、列車運行管理システム2へ通知し(ステップ135)、一連のゾーン監視処理を終了する。
これにより、列車運行管理システム2から列車の運転士に対して車両緊急停止を通知することができ、被害を未然に回避することができる。
【0060】
[第1の実施の形態の効果]
このように、本実施の形態では、歩行者位置検知部11で、駅のプラットフォームを歩行する歩行者の位置を検知し、歩行者判定部13で、この検知された検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、この特定監視ゾーンの特定に応じて、ゾーン監視部17で、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始し、落下検知器15で落下物が検知された場合、警報通知部18で、歩行者転落を示す警報を予め設定された通知先へ通知するようにしたものである。
【0061】
これにより、駅のプラットホーム上において視覚障害者を自動検知でき、線路上に転落した場合でも、早期に管理者や駅係員が対応をとることができ、被害を未然に回避することができる。
また、視覚障害者が存在する位置と対応する監視ゾーンを特定し、この特定監視ゾーンに対応する落下検知器15のみを起動して、視覚障害者の転落を監視するゾーン監視動作を行うようにしたので、歩行者以外の落下物等の重要でない事象を排除し、視覚障害者の安全のための監視に集中強化し、余計なシステム稼働を回避でき、消費電力などの省エネ効果を得ることができる。
【0062】
また、本実施の形態において、歩行者位置検知部11で、視覚障害者誘導用ブロックに内蔵されて歩行者の踏圧を検出する歩行センサ10からのセンサ信号に基づき歩行者の位置を検知するようにしてもよい。これにより、視覚障害者誘導用ブロックに沿った歩行軌跡を正確に検知することができる。
【0063】
また、本実施の形態において、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよい。これにより、歩行軌跡の歩行者が視覚障害者か否かを正確に判定することができる。
【0064】
また、本実施の形態において、ゾーン監視部17で、視覚障害者の歩行軌跡を示す歩行軌跡画面を表示するようにしてもよい。これにより、管理者が、管理者が視覚障害者の存在や歩行位置を容易に確認することができる。
【0065】
また、本実施の形態において、ゾーン監視部17で、特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始するようにしてもよい。これにより、管理者が視覚障害者の存在する監視ゾーンを集中して監視することができる。この際、監視映像とともに視覚障害者の歩行軌跡を示す歩行軌跡を同一画面で表示することにより、視覚障害者の位置および状況を確実に監視することができる。また。プラットフォームに設けてある乗務員用あるいは駅係員用の画面表示部14で監視映像を表示してもよく、プラットフォーム30上の視覚障害者の近くに存在する乗務員や駅係員が、視覚障害者の状況を確認でき、すばやい対応を取ることができる。
【0066】
また、本実施の形態において、警報通知部18により、落下検知器15で落下物が検知された場合、列車運行管理システム2に対して、当該プラットフォームへの列車進入禁止を通知するようにしてもよい。これにより、特定監視ゾーンでの落下物の検知に応じて、迅速にプラットフォームへの列車進入を回避することができる。
【0067】
[第2の実施の形態]
次に、本発明の第2の実施の形態にかかる歩行者転落監視システム1について説明する。
第1の実施の形態では、歩行者判定部13で視覚障害者を判定する際、歩行距離Lが基準距離Lthを上回った場合に視覚障害者と判定する場合を例として説明した。この場合、子供などがいたずらで視覚障害者誘導用ブロックの上を長い距離歩いた場合、誤認識を排除できない。勿論、ごく稀な頻度であれば、誤認識で警戒態勢をとったとしても運用上問題はない。監視カメラにて子供のいたずらと分かるからである。
【0068】
本実施の形態では、視覚障害者は所持する白杖により前方の路面を触擦しながら歩行することに着目し、この白杖による触擦を検知することにより、歩行軌跡を描いて歩く歩行者が視覚障害者かどうかを判定する場合について説明する。
この際、白杖により前方の路面を触擦しながら、視覚障害者誘導用ブロックBの上を歩行する場合、現在位置に先行して、前方の視覚障害者誘導用ブロックB上の突起部を白杖で左右にスクラッチさせながら触擦する。したがって、白杖のスクラッチ運動による突起部の触打を検知することによって、視覚障害者を確実に検知できる。
【0069】
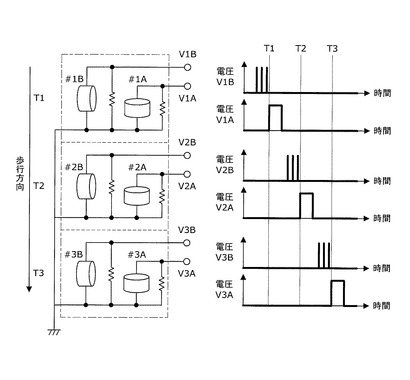
図14は、第2の実施の形態にかかる白杖による触擦を伴う歩行軌跡の検出過程を示す説明図である。ここでは、視覚障害者誘導用ブロックBの突起部に、前述した圧力センサ(垂直型センサアレイ)#1A,#2A,#3Aに加えて、水平の触打振動を感知するような小型の振動センサ#1B,#2B,#3Bが内蔵されている。白杖による突起部のスクラッチ振動は水平振動であることを考慮して、設置にはセンサの検知方向(水平)に注意して実装する。
【0070】
この振動センサ#1B,#2B,#3Bからのセンサ信号V1B,V2B,V3Bは、白杖のスクラッチ振動に応じて、非常に短い時間に連続した、例えば3〜4個の短周期パルスからなる振動検知信号が発生する。この振動検知信号は、現在位置に先行して、前方の歩行センサ10に同時に繰り返し現れることが期待される。
【0071】
本実施の形態では、歩行信号検知部11に、圧力センサからのセンサ信号に基づいて、駅のプラットフォームを歩行する歩行者の位置を検知する機能に加えて、振動センサからの振動検知信号に基づいて白杖による触察を検知する機能を備えている。
そして、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックBに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定する。
【0072】
この際、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックBに沿った歩行軌跡を描く場合、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合、および当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合のすべてが成立した場合、当該歩行者を視覚障害者と判定するようにしてもよい。
【0073】
[第2の実施の形態の効果]
これにより、子供などがいたずらで視覚障害者誘導用ブロックの上を長い距離歩いた場合でも、視覚障害者ではないと判定でき、歩行者判定部13における、視覚障害者の判定に対する信頼性を確実なものとすることができる。
また、これに加えて、前述したように、歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよく、極めて信頼性の高い判定結果を得ることができる。
【0074】
[実施の形態の拡張]
以上、実施形態を参照して本発明を説明したが、本発明は上記実施形態に限定されるものではない。本発明の構成や詳細には、本発明のスコープ内で当業者が理解しうる様々な変更をすることができる。また、各実施形態については、矛盾しない範囲で任意に組み合わせて実施することができる。
【符号の説明】
【0075】
1…歩行者転落監視システム、10…歩行センサ、11…歩行者位置検知部、12…蓄積部、13…歩行者判定部、14…画面表示部、15…落下検知器、16…監視カメラ、17…ゾーン監視部、18…警報通知、2…列車運行管理システム、30…プラットフォーム、31…上り線路、32…下り線路、B…視覚障害者誘導用ブロック、Z…監視ゾーン。
【技術分野】
【0001】
本発明は、駅プラットホームにおいて、視覚障害者が線路に転落する事故を未然に回避するための歩行者転落監視技術に関する。
【背景技術】
【0002】
視覚障害者の歩行を安全に誘導するために、地面や床面に敷設されている誘導用ブロック(プレート)がある。誘導用ブロックには、平行した線が突起になっていて移動の方向を示す誘導ブロック(線状ブロック)と、格子状の点が突起となっていて注意喚起・警告を促す警告ブロック(点状ブロック)の2種類がある(多くは黄色)。進路が曲がったり、行き止ったりする箇所に警告ブロックが敷き詰められる。
【0003】
駅のプラットホームでは、プラットホームの縁に沿って内側に警告ブロックが埋め込まれ、視覚障害者の警告を促しながら歩行を誘導している。しかし、このような誘導用ブロックが備えられていても、視覚障害者がプラットホームから転落し、直後に進入してきた電車に轢かれる事故が後を絶たない。
【0004】
このような事故に対する最も効果的な対策は、ホームからの転落を防止する、いわゆる「ホームドア」の設置であるが、多大な設置コストの他にも、列車の扉位置の統一や停止位置の精度向上などの問題があり、対策が進んでいない。プラットホームから線路上への転落者が目撃された場合、プラットホームに備えられた「非常通報ベル」を発見者(もしくは、代理者)が押すことによって、非常事態を車両乗務員に知らせるやり方が現状である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−170191号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来技術では、歩行者がプラットホームから転落した事実を発見するのが遅れたり、発見しても「非常通報ベル」が近くに無かったり、どこにあるのか分からなかったりしたため、非常事態の通報が手遅れになる場合がしばしばであった。
視覚障害者がプラットホーム上を歩行していること、およびその転落事象を、現状のような目視でなく、自動的に判別できるようになれば、非常事態の対処も迅速になり、被害を回避することも可能になる。
【0007】
視覚障害者に現在の位置を知らせる方法としては、これまで、誘導用ブロックにICタグを埋め込み、このICタグにGPS装置で取得した位置と周囲の環境情報等とを記録しておき、例えば杖にICタグリーダーを埋め込んで、視覚障害者の利用に供する方法が開示されている(特許文献1など参照)。
しかしながら、この方法は屋外での目的地まで視覚障害者を誘導する場合には適しているが、駅のプラットホーム上ではホームの端が危ないことは既に承知のことであり、本人に位置情報を知らせても課題の解決にはならない。
【0008】
本発明はこのような課題を解決するためのものであり、駅のプラットホーム上において視覚障害者を自動検知し、線路上に転落した場合でも、被害を未然に回避できる歩行者転落監視技術を提供することを目的としている。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明にかかる歩行者転落監視システムは、駅のプラットフォームを歩行する歩行者の位置を検知する歩行者位置検知部と、歩行者位置検知部で検知された検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する歩行者判定部と、歩行者判定部での特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始するゾーン監視部と、落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する警報通知部とを備えている。
【0010】
この際、歩行者位置検知部で、視覚障害者誘導用ブロックに内蔵されて歩行者の踏圧を検出する歩行センサからのセンサ信号に基づき歩行者の位置を検知するようにしてもよい。
【0011】
また、歩行者判定部で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよい。
【0012】
また、ゾーン監視部で、歩行者判定部により判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を表示するようにしてもよい。
【0013】
また、ゾーン監視部で、特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得して画面表示する監視映像表示処理を開始するようにしてもよい。
【0014】
また、ゾーン監視部で、歩行者判定部での特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得し、歩行者判定部で判定した視覚障害者の歩行軌跡とともに、同一画面で表示する監視映像表示処理を開始するようにしてもよい。
【0015】
また、警報通知部で、落下検知器で落下物が検知された場合、列車運行管理システムに対して、当該プラットフォームへの列車進入禁止を通知するようにしてもよい。
【0016】
また、歩行者位置検知部で、視覚障害者誘導用ブロックに内蔵された振動センサから振動検知信号を取得し、歩行者判定部で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定するようにしてもよい。
【発明の効果】
【0017】
本発明によれば、駅のプラットホーム上において視覚障害者を自動検知でき、線路上に転落した場合でも、早期に管理者や駅係員が対応をとることができ、被害を未然に回避することができる。
また、視覚障害者が存在する位置と対応する監視ゾーンを特定し、この特定監視ゾーンに対応する落下検知器のみを起動して、視覚障害者の転落を監視するゾーン監視動作を行うようにしたので、歩行者以外の落下物等の重要でない事象を排除し、視覚障害者の安全のための監視に集中強化し、余計なシステム稼働を回避でき、消費電力などの省エネ効果を得ることができる。
【図面の簡単な説明】
【0018】
【図1】第1の実施の形態にかかる歩行者転落監視システムの構成を示すブロック図である。
【図2】プラットフォームを示す説明図である。
【図3】検知データの構成例である。
【図4】機器管理データの構成例である。
【図5】歩行軌跡の検出過程を示す説明図である。
【図6】歩行軌跡分析画面を示す説明図である。
【図7】センサ信号の連続シークエンスを示す説明図である。
【図8】センサ信号の検出例を示す説明図である。
【図9】歩行軌跡画面を示す説明図である。
【図10】監視映像画面を示す説明図である。
【図11】第1の実施の形態にかかる歩行者転落監視システムの視覚障害者判定処理を示すフローチャートである。
【図12】第1の実施の形態にかかる歩行者転落監視システムの監視ゾーン特定処理を示すフローチャートである。
【図13】第1の実施の形態にかかる歩行者転落監視システムのゾーン監視処理を示すフローチャートである。
【図14】第2の実施の形態にかかる白杖による触擦を伴う歩行軌跡の検出過程を示す説明図である。
【発明を実施するための形態】
【0019】
次に、本発明の実施の形態について図面を参照して説明する。
[第1の実施の形態]
まず、図1を参照して、本発明の第1の実施の形態にかかる歩行者転落監視システム1について説明する。図1は、第1の実施の形態にかかる歩行者転落監視システムの構成を示すブロック図である。
この歩行者転落監視システム1は、駅のプラットフォームに設置されて、プラットフォームを歩行する歩行者について、線路への転落を監視する機能を有している。
【0020】
本実施の形態は、駅のプラットフォームを歩行する歩行者の位置を検知し、この検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、この特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始し、落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知するようにしたものである。
【0021】
次に、図1を参照して、本実施の形態にかかる歩行者転落監視システム1の構成について詳細に説明する。
この歩行者転落監視システム1には、主な機能部として、歩行センサ10、歩行者位置検知部11、蓄積部12、歩行者判定部13、画面表示部14、落下検知器15、監視カメラ16、ゾーン監視部17、および警報通知部18が設けられている。
【0022】
歩行センサ10は、視覚障害者誘導用ブロックBの突起部に内蔵された、例えば圧電素子などの圧力センサからなり、歩行者が突起部を踏圧するとセンサ信号を出力する機能を有している。
歩行者位置検知部11は、歩行センサ10からのセンサ信号に基づいて、駅のプラットフォームを歩行する歩行者の位置を検知する機能と、検知した位置と検知した時刻との組を検知データとして順次蓄積部12へ蓄積する機能とを有している。
【0023】
図2は、プラットフォームを示す説明図である。ここでは、プラットフォーム30の両側面に、上り線路31と下り線路32が対向して敷設されている。プラットフォーム30には、視覚障害者誘導用ブロックBが歩行経路に沿って敷設されている。
【0024】
視覚障害者誘導用ブロックBは、通常、正方形のブロック(約30cm×30cm)を連続して配列したものであるが、例えば1ブロックに1つの歩行センサ10を実装して、個別のユニット番号を予め付与し、このブロック上ではどの部分を踏んでも同じユニット番号を示すセンサ信号を発信するよう予め設定する。ただし、歩行センサ10の構成はこれに限らず、例えば進行方向に対して直角(並列)方向に並んだ2つのブロックを合わせて1つの歩行センサ10を構成してもよい。
【0025】
ユニット番号は、連続して配置されたブロックには連続したユニット番号を付与して管理する。こうすることによって、検知されたセンサ信号のユニット番号とブロックの敷設間隔とから、実際の歩行者の誘導用ブロック上の歩行距離を容易に算出できる。
【0026】
図2に示すように、1つのプラットホームには通常、上り下り2路線のホーム端に沿って2本の長い誘導用ブロック線があるので、例えば、総ての歩行センサ10に一意的に異なるユニット番号を付与すれば、ユニット番号からそれが上り下りどちらの車線側のどの辺りにあるかが特定される。なお、上り側、下り側を独立に管理するならば、ユニット番号は片側だけで一意的に付与してもよい。
【0027】
蓄積部12は、歩行者位置検知部11で検知された検知位置とその検知時刻とを、検知データとして順次蓄積する機能を有している。
図3は、検知データの構成例である。ここでは、歩行センサ10のユニット番号からなる検知位置および検知時刻の組が検知データとして蓄積されている。
【0028】
歩行者判定部13は、歩行者位置検知部で検知された検知位置が、プラットフォーム30に敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、さらには当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合、当該歩行者を視覚障害者と判定する機能と、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォーム30を予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する機能とを有している。
【0029】
画面表示部14は、LCDなどの画面表示装置からなり、歩行者判定部13で視覚障害者と判定した歩行軌跡をプロットした歩行軌跡画面や、監視カメラ16で撮影された監視映像などの各種画面を表示する機能を有している。
落下検知器15は、赤外線や超音波を用いた障害物検知センサからなり、プラットフォーム30の線路側面に複数設置されて、プラットフォーム30から線路31,32への落下物を検知する機能を有している。
監視カメラ16は、プラットフォーム30の状況を撮影するカメラである。
【0030】
ゾーン監視部17は、歩行者判定部13での特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始する機能と、特定監視ゾーンの選択に応じて、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始する機能と、歩行者判定部13で判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を画面表示部14で表示する機能と、これら監視映像と歩行軌跡画面とを同一画面で表示する機能とを有している。
【0031】
警報通知部18は、落下検知器15で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する機能と、落下検知器15で落下物が検知された場合、列車運行管理システム2に対して、当該プラットフォームへの列車進入禁止を通知する機能とを有している。
【0032】
プラットフォーム30には、複数の監視ゾーンが分割して設けられており、この監視ゾーンを単位として視覚障害者が監視される。図2の例では、上り線路31に沿って監視ゾーンZ11,Z12,Z13,Z14が設けられており、下り線路32に沿って監視ゾーンZ21,Z22,Z23,Z24が設けられている。
プラットフォーム30の線路側面には、これら監視ゾーンごとに、落下検知器15が設置されている。また、プラットフォーム30の天井や柱には、これら監視ゾーンの状況を撮影する監視カメラ16(図示せず)が設置されている。
【0033】
図4は、機器管理データの構成例である。ここでは、監視ゾーンごとに、当該監視ゾーンに設置されている歩行センサ、落下検知器、監視カメラを示す機器IDが組として登録されている。この機器管理データは、記憶部(図示せず)に予め保存されており、必要に応じて各機能部から読み出されて使用される。
【0034】
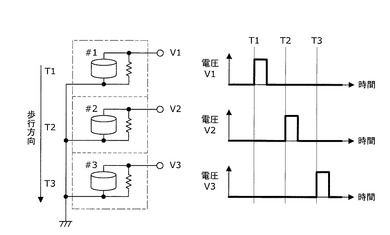
図5は、歩行軌跡の検出過程を示す説明図である。視覚障害者誘導用ブロックBに沿って、歩行者が時刻T1,T2,T3の順に歩行した場合、これら視覚障害者誘導用ブロックBに内蔵されている歩行センサ#1,#2,#3からセンサ信号V1,V2,V3が出力される。
この際、センサ信号V1,V2,V3には、踏圧されている期間に応じたパルス波形が発生する。したがって、隣接する歩行センサ10のセンサ信号がV1,V2,V3上に、時刻T1,T2,T3の順にパルス波形が現れた場合、歩行軌跡として抽出することができる。
【0035】
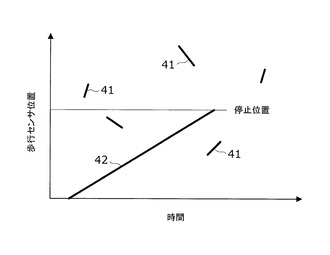
図6は、歩行軌跡分析画面を示す説明図であり、横軸が時間を示し、縦軸が歩行センサ位置を示している。この歩行軌跡分析画面は、歩行者判定部13で抽出された歩行軌跡を、時間軸と空間軸の二次元座標にプロットしたものである。
この歩行軌跡分析画面で、視覚障害者誘導用ブロック上の歩行は、傾きを持つ線分(点)で表示される。短い線分41が多数観測されるであろうが、これらは一般歩行者が視覚障害者誘導用ブロック上を踏み歩いた履歴に相当する。傾きは歩く方向と速さによるため、様々である。この歩行軌跡分析画面をゾーン監視部17により画面表示部14で表示することにより、管理者が視覚障害者誘導用ブロック全体における歩行状況を容易に把握できる。
【0036】
ここで、プラットホーム上に視覚障害者が存在すれば、視覚障害者は基本的に視覚障害者誘導用ブロック上を歩行するので、かなり長い線分42として表示される。また、歩行速度はゆっくりなため、線分の傾きは緩やかなことが予想される。
したがって、この歩行軌跡分析画面から、線分の長さ、すなわち歩行距離が基準距離を上回っている場合、当該歩行軌跡が視覚障害者のもの、すなわち当該歩行者が視覚障害者であると判定できる。また、当該歩行軌跡の後端位置から、視覚障害者の位置を特定することができる。
【0037】
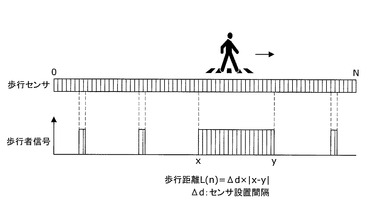
図7は、センサ信号の連続シークエンスを示す説明図である。センサ信号を受信したユニット番号の連続したシークエンス(数列)をx〜yとし、センサ設置間隔をΔd(例えば30cm)とした場合、歩行者の視覚障害者誘導用ブロック上の歩行距離Lは、次の式(1)で求められる。
L=Δd×|x−y| …(1)
【0038】
図8は、センサ信号の検出例を示す説明図である。歩行センサ10のユニット番号は、なるべく連続的に付与することが望ましいが、視覚障害者誘導用ブロックが分岐されている場合には、そこで不連続な番号付けに成らざるを得ない。この場合には、不連続な番号付けをして良い。図8では、ユニット番号1〜9の歩行センサ10に対してユニット番号23〜20歩行センサ10が分岐して配置されている。
【0039】
したがって、図8の矢印に沿って歩行者が歩行したとすると、ユニット番号23〜20と、ユニット番号5〜9のセンサ信号が時刻順に検知される。この場合、歩行した全長距離は分岐点で分断されて、リセットされるものとなるが、システム動作上の問題にはならない。
【0040】
図9は、歩行軌跡画面を示す説明図である。歩行軌跡画面は、予め用意した駅のプラットフォームの平面図に、歩行者判定部13で抽出された視覚障害者の歩行軌跡をプロットしたものである。ここでは、プラットフォーム30のうち、視覚障害者が視覚障害者誘導用ブロック上を歩行した軌跡に加えて、視覚障害者の位置が示されている。この歩行軌跡画面は、管理画面として管理者用の画面表示部14で表示される。この歩行軌跡画面を確認することにより、管理者が視覚障害者の存在や歩行位置を容易に確認することができる。
【0041】
図10は、監視映像画面を示す説明図である。監視映像画面は、視覚障害者の位置と対応する特定監視ゾーンの状況を監視カメラ16で撮影した監視映像を示す画面である。ここでは、監視映像とともに、歩行軌跡画面も、同一画面に表示されている。この監視映像画面は、管理画面として管理者用の画面表示部14で表示してもよいが、プラットフォームに設けてある乗務員用あるいは駅係員用の画面表示部14で表示してもよい。これにより、プラットフォーム30上の視覚障害者の近くに存在する乗務員や駅係員が、視覚障害者の状況を確認でき、すばやい対応をとることができる。
【0042】
また、緊急時に、管理者が、プラットフォーム上の乗務員や駅係員のうち、対象となる視覚障害者の位置に近い乗務員や駅係員に対応指示ができるように、プラットフォーム上の乗務員や駅係員の位置を特定できる一般なRFIDやGPSなどを用いた情報システムと連動させて、そのシステムからの位置情報を利用し、管理者用の画面表示部14にその位置を表示させ、視覚障害者の位置に近い乗務員や駅係員を的確に特定して、指示・連絡を取れるようにしてもよい。
【0043】
[第1の実施の形態の動作]
次に、本実施の形態にかかる歩行者転落監視システム1の動作について説明する。
【0044】
[視覚障害者判定動作]
まず、図11を参照して、歩行者転落監視システム1の視覚障害者判定動作について説明する。図11は、第1の実施の形態にかかる歩行者転落監視システムの視覚障害者判定処理を示すフローチャートである。
【0045】
歩行者位置検知部11は、一定周期で各歩行センサ10からのセンサ信号を確認する(ステップ100)。ここで、任意の歩行センサからのセンサ信号が歩行者の検知を示している場合(ステップ101:YES)、検知のあった歩行センサを検知歩行センサiとし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ102)。また、歩行者判定部13は、歩行距離Lをゼロに初期化する(ステップ103)。
【0046】
次に、歩行者位置検知部11は、待ち時間Δtだけ待機した後(ステップ104)、直前に検知した歩行センサiと隣接する歩行センサjを選択し(ステップ105)、隣接歩行センサjからのセンサ信号を確認する(ステップ106)。この際、隣接歩行センサjが複数存在する場合にはこれらすべての隣接歩行センサjについてセンサ信号を確認する。
【0047】
ここで、各隣接歩行センサjからのセンサ信号のすべてにおいて、歩行者の検知を示さない場合(ステップ107:NO)、当該歩行軌跡が視覚障害者誘導用ブロック上から逸れたことから、当該歩行軌跡の歩行者が視覚障害者でないと判定できる。したがって、当該歩行軌跡の追跡を終了して、ステップ100へ戻る。
【0048】
一方、各隣接歩行センサjからのセンサ信号のいずれかが歩行者の検知を示す場合(ステップ107:YES)、歩行者位置検知部11は、検知のあった隣接歩行センサjを新たな検知歩行センサi(i=j)とし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ108)。
【0049】
この後、歩行者判定部13は、歩行距離Lに歩行センサ設置間隔Δdを加算して歩行距離L(L=L+Δd)を更新し(ステップ110)、歩行距離Lと基準距離Lthとを比較する(ステップ111)。
ここで、歩行距離Lが基準距離Lth以下の場合(ステップ111:NO)、ステップ104へ戻り、当該歩行軌跡の追跡を継続する。一方、歩行距離Lが基準距離Lthを上回っている場合(ステップ111:YES)、歩行者判定部13は、当該歩行軌跡の歩行者が視覚障害者であると判定し(ステップ112)、一連の視覚障害者判定処理を終了する。
【0050】
[監視ゾーン特定動作]
次に、図12を参照して、歩行者転落監視システム1の監視ゾーン特定動作について説明する。図12は、第1の実施の形態にかかる歩行者転落監視システムの監視ゾーン特定処理を示すフローチャートである。
【0051】
歩行者判定部13は、前述した図11の視覚障害者判定処理で、歩行軌跡の歩行者が視覚障害者であると判定した場合、まず、待ち時間Δtだけ待機した後(ステップ120)、直前に検知した歩行センサiと隣接する歩行センサjを選択し(ステップ121)、隣接歩行センサjからのセンサ信号を確認する(ステップ122)。この際、隣接歩行センサjが複数存在する場合にはこれらすべての隣接歩行センサjについてセンサ信号を確認する。
【0052】
ここで、各隣接歩行センサjからのセンサ信号のいずれかが歩行者の検知を示す場合(ステップ123:YES)、検知のあった隣接歩行センサjを新たな検知歩行センサi(i=j)とし、この検知歩行センサiのユニット番号iとその検知時刻T(i)との組を蓄積部12に蓄積する(ステップ124)。
また、歩行者判定部13は、歩行距離Lに歩行センサ設置間隔Δdを加算して歩行距離L(L=L+Δd)を更新し(ステップ125)、ステップ120へ戻り、当該歩行軌跡の追跡を継続する。
【0053】
一方、各隣接歩行センサjからのセンサ信号のすべてにおいて、歩行者の検知を示さない場合(ステップ123:NO)、当該歩行軌跡の視覚障害者が歩行を停止したと判定できる。したがって、当該位置を歩行軌跡の終点、すなわち視覚障害者の停止位置と見なすことができ、歩行者判定部13は、前述した図4の機器管理データを参照して、最終歩行センサiが属する監視ゾーンを、視覚障害者が存在する監視ゾーンZとして特定し(ステップ126)、一連の監視ゾーン特定処理を終了する。
【0054】
[ゾーン監視動作]
次に、図13を参照して、歩行者転落監視システム1のゾーン監視動作について説明する。図13は、第1の実施の形態にかかる歩行者転落監視システムのゾーン監視処理を示すフローチャートである。
【0055】
ゾーン監視部17は、前述した図12の監視ゾーン特定処理で、視覚障害者が存在する監視ゾーンZが特定された場合、まず、前述した図4の機器管理データを参照して、監視ゾーンZに対応する落下検知器15と監視カメラ16とを特定し(ステップ130)、特定した落下検知器15と監視カメラを起動する(ステップ131)。
【0056】
これにより、ゾーン監視部17は、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始するとともに、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始する。この際、前述の図9に示したように、歩行者判定部13で判定した視覚障害者の歩行軌跡を示す歩行軌跡画面を画面表示部14で表示するようにしてもよい。また、前述の図10に示したように、これら監視映像と歩行軌跡画面とを同一画面で表示するようにしてもよい。
【0057】
次に、ゾーン監視部17は、落下検知器15からの落下検知の有無を確認し(ステップ132)、落下検知がない場合(ステップ132:NO)、列車到着の有無を確認する(ステップ133)。列車到着については、当該特定監視ゾーンと対応する線路に設けられている各落下検知器15のすべてで、列車を落下物として検知した場合に、列車到着と判定すればよい。また、列車運行管理システム2からの通知により列車到着を判定してもよい。
【0058】
ここで、列車到着通知がない場合には(ステップ133:NO)、ステップ132に戻って、落下検知の確認を継続する。一方、列車到着通知があった場合(ステップ133:YES)、特定監視ゾーンに対応する落下検知器15と監視カメラ16とを停止して(ステップ134)、特定監視ゾーンに関する一連のゾーン監視処理を終了する。
【0059】
また、ステップ132において、落下検知があった場合(ステップ132:YES)、警報通知部18は、特定監視ゾーンと対応する線路への列車進入禁止を、列車運行管理システム2へ通知し(ステップ135)、一連のゾーン監視処理を終了する。
これにより、列車運行管理システム2から列車の運転士に対して車両緊急停止を通知することができ、被害を未然に回避することができる。
【0060】
[第1の実施の形態の効果]
このように、本実施の形態では、歩行者位置検知部11で、駅のプラットフォームを歩行する歩行者の位置を検知し、歩行者判定部13で、この検知された検知位置が、プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定し、この特定監視ゾーンの特定に応じて、ゾーン監視部17で、当該特定監視ゾーンに設置された落下検知器15による線路への落下物の検知処理を開始し、落下検知器15で落下物が検知された場合、警報通知部18で、歩行者転落を示す警報を予め設定された通知先へ通知するようにしたものである。
【0061】
これにより、駅のプラットホーム上において視覚障害者を自動検知でき、線路上に転落した場合でも、早期に管理者や駅係員が対応をとることができ、被害を未然に回避することができる。
また、視覚障害者が存在する位置と対応する監視ゾーンを特定し、この特定監視ゾーンに対応する落下検知器15のみを起動して、視覚障害者の転落を監視するゾーン監視動作を行うようにしたので、歩行者以外の落下物等の重要でない事象を排除し、視覚障害者の安全のための監視に集中強化し、余計なシステム稼働を回避でき、消費電力などの省エネ効果を得ることができる。
【0062】
また、本実施の形態において、歩行者位置検知部11で、視覚障害者誘導用ブロックに内蔵されて歩行者の踏圧を検出する歩行センサ10からのセンサ信号に基づき歩行者の位置を検知するようにしてもよい。これにより、視覚障害者誘導用ブロックに沿った歩行軌跡を正確に検知することができる。
【0063】
また、本実施の形態において、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよい。これにより、歩行軌跡の歩行者が視覚障害者か否かを正確に判定することができる。
【0064】
また、本実施の形態において、ゾーン監視部17で、視覚障害者の歩行軌跡を示す歩行軌跡画面を表示するようにしてもよい。これにより、管理者が、管理者が視覚障害者の存在や歩行位置を容易に確認することができる。
【0065】
また、本実施の形態において、ゾーン監視部17で、特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラ16から取得して画面表示部14で表示する監視映像表示処理を開始するようにしてもよい。これにより、管理者が視覚障害者の存在する監視ゾーンを集中して監視することができる。この際、監視映像とともに視覚障害者の歩行軌跡を示す歩行軌跡を同一画面で表示することにより、視覚障害者の位置および状況を確実に監視することができる。また。プラットフォームに設けてある乗務員用あるいは駅係員用の画面表示部14で監視映像を表示してもよく、プラットフォーム30上の視覚障害者の近くに存在する乗務員や駅係員が、視覚障害者の状況を確認でき、すばやい対応を取ることができる。
【0066】
また、本実施の形態において、警報通知部18により、落下検知器15で落下物が検知された場合、列車運行管理システム2に対して、当該プラットフォームへの列車進入禁止を通知するようにしてもよい。これにより、特定監視ゾーンでの落下物の検知に応じて、迅速にプラットフォームへの列車進入を回避することができる。
【0067】
[第2の実施の形態]
次に、本発明の第2の実施の形態にかかる歩行者転落監視システム1について説明する。
第1の実施の形態では、歩行者判定部13で視覚障害者を判定する際、歩行距離Lが基準距離Lthを上回った場合に視覚障害者と判定する場合を例として説明した。この場合、子供などがいたずらで視覚障害者誘導用ブロックの上を長い距離歩いた場合、誤認識を排除できない。勿論、ごく稀な頻度であれば、誤認識で警戒態勢をとったとしても運用上問題はない。監視カメラにて子供のいたずらと分かるからである。
【0068】
本実施の形態では、視覚障害者は所持する白杖により前方の路面を触擦しながら歩行することに着目し、この白杖による触擦を検知することにより、歩行軌跡を描いて歩く歩行者が視覚障害者かどうかを判定する場合について説明する。
この際、白杖により前方の路面を触擦しながら、視覚障害者誘導用ブロックBの上を歩行する場合、現在位置に先行して、前方の視覚障害者誘導用ブロックB上の突起部を白杖で左右にスクラッチさせながら触擦する。したがって、白杖のスクラッチ運動による突起部の触打を検知することによって、視覚障害者を確実に検知できる。
【0069】
図14は、第2の実施の形態にかかる白杖による触擦を伴う歩行軌跡の検出過程を示す説明図である。ここでは、視覚障害者誘導用ブロックBの突起部に、前述した圧力センサ(垂直型センサアレイ)#1A,#2A,#3Aに加えて、水平の触打振動を感知するような小型の振動センサ#1B,#2B,#3Bが内蔵されている。白杖による突起部のスクラッチ振動は水平振動であることを考慮して、設置にはセンサの検知方向(水平)に注意して実装する。
【0070】
この振動センサ#1B,#2B,#3Bからのセンサ信号V1B,V2B,V3Bは、白杖のスクラッチ振動に応じて、非常に短い時間に連続した、例えば3〜4個の短周期パルスからなる振動検知信号が発生する。この振動検知信号は、現在位置に先行して、前方の歩行センサ10に同時に繰り返し現れることが期待される。
【0071】
本実施の形態では、歩行信号検知部11に、圧力センサからのセンサ信号に基づいて、駅のプラットフォームを歩行する歩行者の位置を検知する機能に加えて、振動センサからの振動検知信号に基づいて白杖による触察を検知する機能を備えている。
そして、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックBに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定する。
【0072】
この際、歩行者判定部13で、検知位置が視覚障害者誘導用ブロックBに沿った歩行軌跡を描く場合、当該視覚障害者誘導用ブロックで検知された振動検知信号から視覚障害者の所持する白杖による触察が検知された場合、および当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合のすべてが成立した場合、当該歩行者を視覚障害者と判定するようにしてもよい。
【0073】
[第2の実施の形態の効果]
これにより、子供などがいたずらで視覚障害者誘導用ブロックの上を長い距離歩いた場合でも、視覚障害者ではないと判定でき、歩行者判定部13における、視覚障害者の判定に対する信頼性を確実なものとすることができる。
また、これに加えて、前述したように、歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定するようにしてもよく、極めて信頼性の高い判定結果を得ることができる。
【0074】
[実施の形態の拡張]
以上、実施形態を参照して本発明を説明したが、本発明は上記実施形態に限定されるものではない。本発明の構成や詳細には、本発明のスコープ内で当業者が理解しうる様々な変更をすることができる。また、各実施形態については、矛盾しない範囲で任意に組み合わせて実施することができる。
【符号の説明】
【0075】
1…歩行者転落監視システム、10…歩行センサ、11…歩行者位置検知部、12…蓄積部、13…歩行者判定部、14…画面表示部、15…落下検知器、16…監視カメラ、17…ゾーン監視部、18…警報通知、2…列車運行管理システム、30…プラットフォーム、31…上り線路、32…下り線路、B…視覚障害者誘導用ブロック、Z…監視ゾーン。
【特許請求の範囲】
【請求項1】
駅のプラットフォームを歩行する歩行者の位置を検知する歩行者位置検知部と、
前記歩行者位置検知部で検知された前記検知位置が、前記プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、前記プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する歩行者判定部と、
前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始するゾーン監視部と、
前記落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する警報通知部と
を備えることを特徴とする歩行者転落監視システム。
【請求項2】
請求項1に記載の歩行者転落監視システムにおいて、
前記歩行者位置検知部は、前記視覚障害者誘導用ブロックに内蔵されて前記歩行者の踏圧を検出する歩行センサからのセンサ信号に基づき前記歩行者の位置を検知することを特徴とする歩行者転落監視システム。
【請求項3】
請求項1または請求項2に記載の歩行者転落監視システムにおいて、
前記歩行者判定部は、前記検知位置が前記視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定することを特徴とする歩行者転落監視システム。
【請求項4】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部で判定した前記視覚障害者の歩行軌跡を示す歩行軌跡画面を表示することを特徴とする歩行者転落監視システム。
【請求項5】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得して画面表示する監視映像表示処理を開始することを特徴とする歩行者転落監視システム。
【請求項6】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得し、前記歩行者判定部で判定した前記視覚障害者の歩行軌跡とともに、同一画面で表示する監視映像表示処理を開始することを特徴とする歩行者転落監視システム。
【請求項7】
請求項1〜請求項6のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記警報通知部は、前記落下検知器で落下物が検知された場合、列車運行管理システムに対して、当該プラットフォームへの列車進入禁止を通知することを特徴とする歩行者転落監視システム。
【請求項8】
請求項2に記載の歩行者転落監視システムにおいて、
前記歩行者位置検知部は、前記視覚障害者誘導用ブロックに内蔵された振動センサから振動検知信号を取得し、
前記歩行者判定部は、前記検知位置が前記視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された前記振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定することを特徴とする歩行者転落監視システム。
【請求項1】
駅のプラットフォームを歩行する歩行者の位置を検知する歩行者位置検知部と、
前記歩行者位置検知部で検知された前記検知位置が、前記プラットフォームに敷設されている視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合、当該歩行者を視覚障害者と判定し、当該視覚障害者と判定した歩行軌跡に基づいて、前記プラットフォームを予め分割して設けた複数の監視ゾーンのうちから、当該視覚障害者の位置と対応する特定監視ゾーンを特定する歩行者判定部と、
前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンに設置された落下検知器による線路への落下物の検知処理を開始するゾーン監視部と、
前記落下検知器で落下物が検知された場合、歩行者転落を示す警報を、予め設定された通知先へ通知する警報通知部と
を備えることを特徴とする歩行者転落監視システム。
【請求項2】
請求項1に記載の歩行者転落監視システムにおいて、
前記歩行者位置検知部は、前記視覚障害者誘導用ブロックに内蔵されて前記歩行者の踏圧を検出する歩行センサからのセンサ信号に基づき前記歩行者の位置を検知することを特徴とする歩行者転落監視システム。
【請求項3】
請求項1または請求項2に記載の歩行者転落監視システムにおいて、
前記歩行者判定部は、前記検知位置が前記視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該歩行軌跡から算出した当該歩行者の歩行距離が基準距離を上回っている場合に、当該歩行者を視覚障害者と判定することを特徴とする歩行者転落監視システム。
【請求項4】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部で判定した前記視覚障害者の歩行軌跡を示す歩行軌跡画面を表示することを特徴とする歩行者転落監視システム。
【請求項5】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得して画面表示する監視映像表示処理を開始することを特徴とする歩行者転落監視システム。
【請求項6】
請求項1〜請求項3のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記ゾーン監視部は、前記歩行者判定部での前記特定監視ゾーンの特定に応じて、当該特定監視ゾーンの映像を監視カメラから取得し、前記歩行者判定部で判定した前記視覚障害者の歩行軌跡とともに、同一画面で表示する監視映像表示処理を開始することを特徴とする歩行者転落監視システム。
【請求項7】
請求項1〜請求項6のうちのいずれか1つに記載の歩行者転落監視システムにおいて、
前記警報通知部は、前記落下検知器で落下物が検知された場合、列車運行管理システムに対して、当該プラットフォームへの列車進入禁止を通知することを特徴とする歩行者転落監視システム。
【請求項8】
請求項2に記載の歩行者転落監視システムにおいて、
前記歩行者位置検知部は、前記視覚障害者誘導用ブロックに内蔵された振動センサから振動検知信号を取得し、
前記歩行者判定部は、前記検知位置が前記視覚障害者誘導用ブロックに沿った歩行軌跡を描く場合であって、かつ、当該視覚障害者誘導用ブロックで検知された前記振動検知信号から視覚障害者の所持する白杖による触察が検知された場合に、当該歩行者を視覚障害者と判定することを特徴とする歩行者転落監視システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−243177(P2012−243177A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−114370(P2011−114370)
【出願日】平成23年5月23日(2011.5.23)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月23日(2011.5.23)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]