
歩行補助椅子
【課題】ユーザの歩行をより適切に補助すること。
【解決手段】車両部分2と、昇降可能に車両部分2に支持される昇降座面18を車椅子位置に配置したり、その車椅子位置より上側の歩行器位置に配置したりする座面昇降装置24と、座面退避装置51とを備えている。座面退避装置51は、昇降座面18がその車椅子位置に固定されているときに、昇降座面18と複数の退避座面19−1〜19−2とが車椅子用座面14を形成するように、昇降座面18に対して所定の位置に複数の退避座面19−1〜19−2を固定し、昇降座面18がその歩行器位置に固定されているときに、昇降座面18に対してその所定の位置と異なる他の位置に複数の退避座面19−1〜19−2を配置する。ユーザは、このような装置を歩行器として利用しているときに、車椅子用座面14より小さくなるように座面を形成することができ、ユーザの歩行を阻害する部分を低減することができる。
【解決手段】車両部分2と、昇降可能に車両部分2に支持される昇降座面18を車椅子位置に配置したり、その車椅子位置より上側の歩行器位置に配置したりする座面昇降装置24と、座面退避装置51とを備えている。座面退避装置51は、昇降座面18がその車椅子位置に固定されているときに、昇降座面18と複数の退避座面19−1〜19−2とが車椅子用座面14を形成するように、昇降座面18に対して所定の位置に複数の退避座面19−1〜19−2を固定し、昇降座面18がその歩行器位置に固定されているときに、昇降座面18に対してその所定の位置と異なる他の位置に複数の退避座面19−1〜19−2を配置する。ユーザは、このような装置を歩行器として利用しているときに、車椅子用座面14より小さくなるように座面を形成することができ、ユーザの歩行を阻害する部分を低減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行補助椅子に関し、特に、車椅子としても歩行器としても利用することができる歩行補助椅子に関する。
【背景技術】
【0002】
起立したユーザの上体を支持することにより、そのユーザの歩行を補助する歩行器が知られている。その歩行器は、歩行障害を有するユーザのリハビリテーションに利用されることもある。座っているユーザは、その歩行器を利用する前に立ち上がる必要がある。その歩行器を利用しているユーザは、疲労等により椅子に座りたくなったときに、椅子の近くまで移動する必要がある。このような歩行器は、このような負担をより軽減することが望まれ、ユーザが歩行することをより適切に補助することが望まれている。
【0003】
特開2001−321404号公報には、1台で車椅子としても利用でき、また、歩行器としても利用できるハンドリム付き手動歩行器兼用車椅子が開示されている。その歩行器兼用車椅子は、利用者が着座するための座部を備えており、この座部が上下方向に移動可能とされており、座部が下方に位置するときは車椅子として利用可能であり、座部が上方に位置するときは歩行器として利用可能であるように構成されている。
【0004】
特開平10−179644号公報には、ベースとなる従来の椅子に起立の補助となるメカニズムが組付けられた起立補助椅子が開示されている。その起立補助椅子は、脚の後方上部に背もたれを有し、左右に肘掛けを有する椅子であって、座部を奥行の短い前座部と、これより奥行の長い後座部とに分割して構成し、該後座部の前端下部と前記前座部の後端部とを屈曲自在なヒンジにより連結し、前記後座部の前端下部と脚側とを前リンクで連結するとともに前記後座部の後端下部と脚側とを後リンクで連結して平行リンクを構成し、前記後座部の前後方向中間部と脚の後方下部とをガススプリングで連結してなり、該ガススプリングの伸長時に後座部がほぼ平行移動して上昇するとともに前座部の前部が自重により前方に垂れ下がるようにしたことを特徴としている。
【0005】
特開2011−87611号公報には、要介護者が無理なく座り姿勢から立ち姿勢に移れるのはもちろんのこと、いたずらな重量の増大化と製造コストの高騰化を回避し得て、その汎用性の向上を期待するのに最適となる起立援助椅子が開示されている。その起立援助椅子は、要介護者を着座させる座部およびこの座部に連続して要介護者の背を支える背凭れを有する椅子と、この椅子に連結されて駆動手段の駆動でこの椅子を昇降させる昇降機構とを有してなる起立援助椅子において、上記の昇降機構で上昇した上記の椅子における座部の上記の背凭れに近隣する後側部における上昇位置の方が上記の椅子における座部の上記の背凭れから離れる前側部における上昇位置より高くなることを特徴としている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−321404号公報
【特許文献2】特開平10−179644号公報
【特許文献3】特開2011−87611号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、ユーザの歩行をより適切に補助する歩行補助椅子を提供することにある。
本発明の他の課題は、ユーザが歩くときに、ユーザの足の運びを邪魔しないようにした歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザが楽に起立したり、ユーザが着席したりすることをより適切に補助する歩行補助椅子を提供することにある。
本発明のさらに他の課題は、通常の椅子と同様に腰全体を保持し、長時間座ることができる歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザがより容易に利用することができる歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザが立ち仕事をするときに、そのユーザの足腰の安定を継続して補助する歩行補助椅子を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による歩行補助椅子は、床を移動する車両部分(2)と、昇降可能に車両部分(2)に支持される昇降座面(18)と、車椅子位置に配置されるように昇降座面(18)を車両部分(2)に固定したり、その車椅子位置より鉛直上側の歩行器位置に配置されるように昇降座面(18)を車両部分(2)に固定したりする座面昇降装置(24)と、退避座面(19−1〜19−2)と、座面退避装置(51)とを備えている。座面退避装置(51)は、昇降座面(18)がその車椅子位置に固定されているときに、昇降座面(18)と退避座面(19−1〜19−2)とが車椅子用座面(14)を形成するように、昇降座面(18)に対して所定の位置に退避座面(19−1〜19−2)を固定する。座面退避装置(51)は、昇降座面(18)がその歩行器位置に固定されているときに、昇降座面(18)に対してその所定の位置と異なる他の位置に退避座面(19−1〜19−2)を配置する。退避座面(19−1〜19−2)は、昇降座面(18)の前方で連結されていてもかまわない。
【0010】
ユーザは、このような歩行補助椅子を歩行器として利用しているときに、少し腰を落とすだけで昇降座面(18)に座ることができ、または、昇降座面(18)に体重をかけながら歩行することができる。このような歩行補助椅子は、歩行器として利用されているときに、さらに、車椅子として利用されるときに形成される車椅子用座面(14)より小さくなるように昇降座面(18)を形成することができ、ユーザの歩行を阻害する部分を低減することができる。このため、このような歩行補助椅子は、ユーザが歩行することをより適切に補助することができる。
【0011】
退避座面(19−1〜19−2)は、左側退避座面(19−1)と右側退避座面(19−2)とを備えている。昇降座面(18)は、昇降座面(18)がその車椅子位置に固定されているときに、左側退避座面(19−1)と右側退避座面(19−2)との間に配置される。ユーザは、このような歩行補助椅子を歩行器として利用しているときに、昇降座面(18)を跨ぐようにして歩行し、少し腰を落としたときにより確実に昇降座面(18)に座ることができる。このような歩行補助椅子は、ユーザが昇降座面(18)に跨いで座っているときに、昇降座面(18)を昇降させることにより、ユーザが起立したり、ユーザが着席したりすることをより適切に補助することができる。
【0012】
座面昇降装置(24)は、昇降座面(18)を昇降させることにより、昇降座面(18)をその車椅子位置に配置したり、昇降座面(18)をその歩行器位置に配置したりする。このような歩行補助椅子は、ユーザが昇降座面(18)に座っているときに昇降座面(18)を昇降させることにより、ユーザが起立したり、ユーザが着席したりすることをより適切に補助することができる。
【0013】
本発明による歩行補助椅子は、昇降座面(18)に対して固定されたり、取り外されたりすることができる掴まりバー(17)と、掴まりバー(17)が昇降座面(18)に対して固定されているかどうかを測定する掴まりバーセンサ(66)と、掴まりバー(17)が固定されていないときに、昇降座面(18)が車両部分(2)に対して昇降しないように、座面昇降装置(24)を制御する補助部(82、84)とをさらに備えている。このような歩行補助椅子によれば、ユーザは、掴まりバー(17)に掴まりながら起立したり、着席したりすることができる。このような歩行補助椅子は、さらに、ユーザが掴まりバー(17)に掴まっていないときに昇降座面(18)を昇降させないことにより、ユーザが起立したり、着席したりすることをより適切に補助することができる。
【0014】
座面昇降装置(24)は、固定部材(5)に対して可動部材(36)を移動させるアクチュエータ(25)と、固定部材(5)に対する可動部材(36)の移動を車両部分(2)に対する昇降座面(18)の移動に変換するパンタグラフ(26)とを備えている。このような歩行補助椅子は、可動部材(36)の移動範囲が昇降座面(18)の移動範囲より小さいときに、座面昇降装置(24)をより小型化することができ、ユーザの歩行・着席を阻害する部分を低減することができる。
【0015】
座面退避装置(51)は、車両部分(2)に対する昇降座面(18)の移動を昇降座面(18)に対する退避座面(19−1〜19−2)の移動に変換することにより、昇降座面(18)に対して退避座面(19−1〜19−2)を移動させるリンク機構であることが好ましい。
【0016】
本発明による歩行補助椅子は、ユーザの動きを測定するユーザ動きセンサ(67)と、車両部分(2)を推進させる推進装置(62−1〜62−2)と、昇降座面(18)がその歩行器位置に配置されているときに、その動きに基づいて算出された方向に車両部分(2)が移動するように、推進装置(62−1〜62−2)を制御する歩行補助部(83)とをさらに備えている。このような歩行補助椅子は、歩行器として利用されるときに、ユーザが歩行補助椅子を押す力を低減することができ、ユーザが歩行することをより適切に補助することができる。
【0017】
本発明による歩行補助椅子は、送信機(72)から発信された信号を受信する受信機(63)と、その信号が示しているように車両部分(2)が移動するように、推進装置(62−1〜62−2)を制御する遠隔制御部(85)とをさらに備えている。このような歩行補助椅子は、ユーザが歩行補助椅子から降りたときにも、送信機(72)を操作することにより、歩行補助椅子を自在に移動させることができ、ユーザをより適切に補助することができる。
【発明の効果】
【0018】
本発明による歩行補助椅子は、車椅子として利用されるときに比較的大きい座面でユーザを支持し、歩行器として利用されるときに比較的小さい座面でユーザを支持することにより、ユーザの歩行をより適切に補助することができる。
【図面の簡単な説明】
【0019】
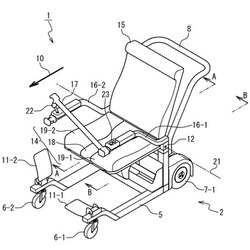
【図1】図1は、本発明による歩行補助椅子を示す斜視図である。
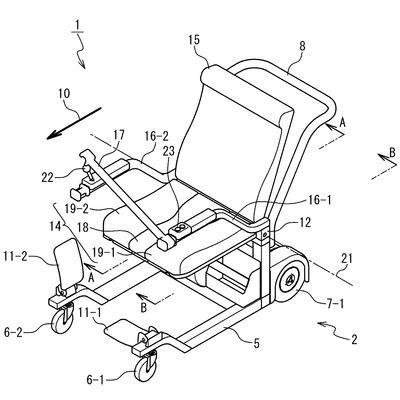
【図2】図2は、歩行器として利用される歩行補助椅子を示す斜視図である。
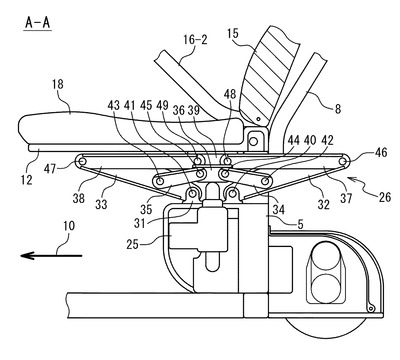
【図3】図3は、座面昇降装置を示す断面図である。
【図4】図4は、昇降座面を少し上昇させた座面昇降装置を示す断面図である。
【図5】図5は、座面退避装置を示す断面図である。
【図6】図6は、退避座面を少し下降させた座面退避装置を示す断面図である。
【図7】図7は、本発明による歩行補助椅子を示すブロック図である。
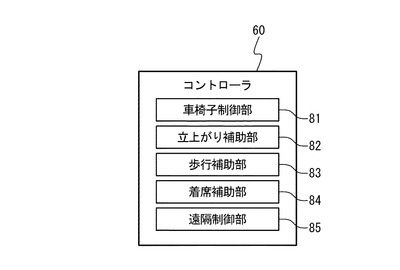
【図8】図8は、コントローラを示すブロック図である。
【発明を実施するための形態】
【0020】
図面を参照して、本発明による歩行補助椅子の実施の形態を記載する。その歩行補助椅子は、歩行補助椅子本体とコントローラとを備えている。その歩行補助椅子本体1は、図1に示されているように、車両部分2を備えている。車両部分2は、床を移動可能に構成され、車両フレーム5と複数の前輪6−1〜6−2と複数の後輪7−1〜7−2とを備えている。複数の前輪6−1〜6−2と複数の後輪7−1〜7−2とは、車両フレーム5が床に接触しないように、車両フレーム5を支持している。複数の前輪6−1〜6−2は、それぞれ、いわゆる自在式キャスターであり、車輪に形成され、回転軸を中心に回転可能に車両フレーム5に支持されている。その回転軸は、鉛直方向に垂直であり、鉛直方向に平行である他の回転軸を中心に回転可能である。複数の後輪7−1〜7−2は、それぞれ、車輪に形成され、回転軸を中心に回転可能に車両フレーム5に支持されている。その回転軸は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。このとき、車両部分2は、複数の前輪6−1〜6−2と複数の後輪7−1〜7−2との車輪が回転することにより、床上を移動することができる。
【0021】
歩行補助椅子本体1は、さらに、手押しバー8を備えている。手押しバー8は、車両フレーム5に固定されている。ユーザや介護者は、手押しバー8を押すことにより、歩行補助椅子本体1を床上で自在に移動させることができる。
【0022】
歩行補助椅子本体1は、さらに、昇降フレーム12と座面14と背もたれ15と複数のアームレスト16−1〜16−2と掴まりバー17と複数のフートステップ11−1〜11−2とを備えている。昇降フレーム12は、鉛直方向に平行移動可能に、車両フレーム5に支持されている。座面14は、板状に形成され、本発明による歩行補助椅子を車椅子として利用するユーザが座る座面に形成されている。座面14は、昇降フレーム12に支持されている。
【0023】
背もたれ15は、板状に形成され、ユーザが座面14に着席したときに、ユーザの背中が接触するように、配置されている。背もたれ15は、回転軸を中心に回転可能に、昇降フレーム12に支持されている。その回転軸は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。背もたれ15は、さらに、図示されていないレバーとリクライニング機構とを備えている。そのリクライニング機構は、そのレバーがユーザにより引かれているときに、ユーザの操作により背もたれ15が回転することができるように、背もたれ15を昇降フレーム12に支持する。そのリクライニング機構は、そのレバーからユーザの手が離れているときに、背もたれ15がその回転軸を中心に回転しないように、背もたれ15を昇降フレーム12に固定する。
【0024】
複数のフートステップ11−1〜11−2は、それぞれ、板状に形成され、足置き面が形成されている。複数のフートステップ11−1〜11−2は、それぞれ、複数の姿勢のいずれかの姿勢に配置されることができるように、回転軸を中心に回転可能にフレームに支持されている。その複数の姿勢は、車椅子用姿勢と歩行器用姿勢とを含んでいる。複数のフートステップ11−1〜11−2は、その車椅子用姿勢に配置されているときに、その足置き面が鉛直上側を向くように、すなわち、座面14に着席したユーザの足がその足置き面に置かれることができるように、配置されている。複数のフートステップ11−1〜11−2は、その歩行器用姿勢に配置されているときに、その足置き面が水平方向を向くように、すなわち、座面14に着席したユーザの足が複数のフートステップ11−1〜11−2にぶつからないで床に置かれることができるように、配置されている。
【0025】
複数のアームレスト16−1〜16−2は、座面14に着席したユーザの肘を掛けることができるように、配置され、昇降フレーム12に支持されている。
【0026】
掴まりバー17は、棒状に形成されている。掴まりバー17は、座面14に着席したユーザの前方を横切るように、配置され、取り外し可能に、複数のアームレスト16−1〜16−2に支持されている。
【0027】
歩行補助椅子本体1は、さらに、ジョイスティック22と操作パネル23とを備えている。ジョイスティック22は、座面14に座るユーザの右手が届くように、右側アームレスト16−2に固定されている。ジョイスティック22は、ユーザに操作されることにより、複数の情報のうちの1つの情報を作成する。その複数の情報は、移動情報とブレーキ情報とブレーキ解放情報とを含んでいる。その移動情報は、方向と速さとを示している。操作パネル23は、座面14に座るユーザの左手が届くように、左側アームレスト16−1に固定されている。操作パネル23は、ユーザに操作されることにより、複数の情報のうちの1つを示す情報を作成する。その複数の情報は、立ち上がり補助と着席補助とを含んでいる。なお、ジョイスティック22と操作パネル23とは、左右入れ替えて複数のアームレスト16−1〜16−2に取り付けられることもできる。
【0028】
座面14は、昇降座面18と複数の退避座面19−1〜19−2とを備えている。昇降座面18は、進行方向10に長い概ね矩形状に形成され、座面14の中央の部分に形成されている。昇降座面18は、昇降フレーム12に固定されている。すなわち、昇降座面18は、昇降フレーム12が昇降することにより、複数の位置に配置されることができる。その複数の位置は、車椅子位置と歩行器位置とを含んでいる。その車椅子位置は、その複数の位置のうちの最も鉛直下側の位置である。その歩行器位置は、その複数の位置のうちのその車椅子位置より鉛直上側の位置であり、ユーザの体格に基づいて設定されたユーザに適した位置である。
【0029】
複数の退避座面19−1〜19−2は、それぞれ、板状に形成されている。複数の退避座面19−1〜19−2のうちの左側退避座面19−1は、座面14の左側の部分に形成されている。複数の退避座面19−1〜19−2のうちの右側退避座面19−2は、座面14の右側の部分に形成されている。すなわち、座面14は、昇降座面18が複数の退避座面19−1〜19−2に挟まれるように配置されることにより、形成される。
【0030】
複数の退避座面19−1〜19−2は、さらに、昇降フレーム12に固定されている回転軸21を中心に回転可能に、昇降フレーム12に支持されている。回転軸21は、鉛直方向に垂直であり、進行方向10に垂直であり、座面14の進行方向10の反対側に配置されている。
【0031】
複数の退避座面19−1〜19−2は、このように構成されていることにより、昇降座面図2に示されているように、昇降座面18より鉛直下側に配置されることができる。
【0032】
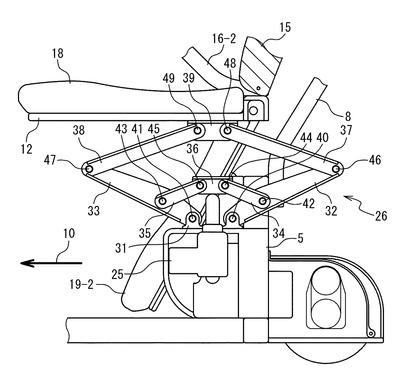
歩行補助椅子本体1は、図2に示されているように、さらに、座面昇降装置24を備えている。座面昇降装置24は、アクチュエータ25とパンタグラフ26とを備えている。
【0033】
図3は、パンタグラフ26を示している。パンタグラフ26は、複数の部材31〜39を備えている。部材31は、車両フレーム5に固定されている。部材32は、部材31に固定されている回転軸40を中心に回転可能に、部材31に支持されている。回転軸40は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。部材33は、部材31に固定されている回転軸41を中心に回転可能に、部材31に支持されている。回転軸41は、回転軸40に平行であり、回転軸40から進行方向10に所定の距離だけ離れるように、配置されている。
【0034】
部材34は、部材32に固定されている回転軸42を中心に回転可能に、部材32に支持されている。回転軸42は、回転軸40に平行である。部材35は、部材33に固定されている回転軸43を中心に回転可能に、部材33に支持されている。回転軸43は、回転軸41に平行である。このとき、部材33は、回転軸41から回転軸43までの距離が回転軸40から回転軸42までの距離に等しくなるように、形成されている。部材36は、部材34に固定されている回転軸44を中心に回転可能に、部材34に支持され、部材35に固定されている回転軸45を中心に回転可能に、部材35に支持されている。回転軸44は、回転軸42に平行である。回転軸45は、回転軸43に平行である。このとき、部材35は、回転軸43から回転軸45までの距離が回転軸42から回転軸44までの距離に等しくなるように、形成されている。
【0035】
部材37は、部材32に固定されている回転軸46を中心に回転可能に、部材32に支持されている。回転軸46は、回転軸40に平行である。このとき、部材32は、回転軸40から回転軸46までの距離が回転軸40から回転軸42までの距離より長くなるように、形成されている。部材38は、部材33に固定されている回転軸47を中心に回転可能に、部材33に支持されている。回転軸47は、回転軸41に平行である。このとき、部材33は、回転軸41から回転軸47までの距離が回転軸40から回転軸46までの距離に等しくなるように、形成されている。
【0036】
部材39は、昇降フレーム12に固定されている。部材39は、さらに、部材37に固定されている回転軸48を中心に回転可能に、部材37に支持され、部材38に固定されている回転軸49を中心に回転可能に、部材38に支持されている。回転軸48は、回転軸46に平行である。回転軸49は、回転軸47に平行である。このとき、部材38は、回転軸47から回転軸49までの距離が回転軸46から回転軸48までの距離に等しくなるように、形成されている。
【0037】
パンタグラフ26は、このように形成されることにより、部材36が鉛直方向に平行に所定の距離だけ移動されたときに、部材39を鉛直方向に、その所定の距離より長い距離移動させることができる。
【0038】
アクチュエータ25は、そのコントローラに制御されることにより、車両フレーム5に対して部材36を鉛直方向に平行に移動させる。
【0039】
パンタグラフ26は、このように形成されることにより、アクチュエータ25により、部材36が鉛直上方に所定の距離だけ移動したときに、図4に示されているように、その所定の距離よりも長い距離だけ部材39が鉛直上方に移動する。このとき、部材39が移動した距離は、部材36が移動した距離に1対1に対応し、たとえば、部材36が移動した距離に正比例する。このため、アクチュエータ25は、部材36を移動させた量を測定することにより、間接的に昇降座面18の位置を測定することができる。アクチュエータ25は、そのコントローラに制御されることにより、昇降座面18の位置を測定し、その位置をそのコントローラに出力する。
【0040】
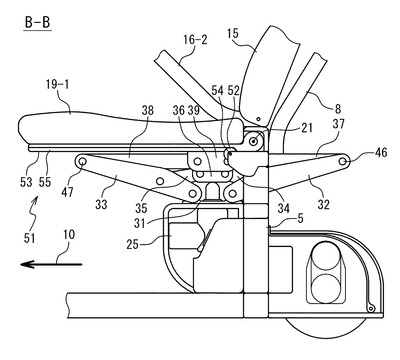
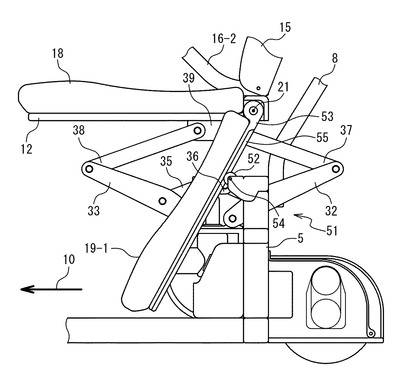
歩行補助椅子本体1は、さらに、図5に示されているように、座面退避装置51を備えている。座面退避装置51は、車52と椅子座ベース53とを備えている。椅子座ベース53は、左側退避座面19−1に固定されている。椅子座ベース53は、ガイドレール55が形成されている。車52は、ガイドレール55に接触するように、配置されている。車52は、車両フレーム5に固定されている回転軸54を中心に回転可能に、車両フレーム5に支持されている。回転軸54は、回転軸21に平行である。
【0041】
車52は、図6に示されているように、昇降フレーム12が車両フレーム5に対して鉛直上方に移動したときに、ガイドレール55に沿って移動する。椅子座ベース53は、車52がガイドレール55に沿って移動することにより、左側退避座面19−1が昇降座面18より鉛直下側に配置されるように、回転軸21を中心に回転する。
【0042】
歩行補助椅子本体1は、さらに、図示されていない他の座面退避装置を備えている。その座面退避装置は、座面退避装置51と同様にして、車両フレーム5に対して鉛直方向に昇降フレーム12が移動することにリンクして、回転軸21を中心に右側退避座面19−2を回転させる。
【0043】
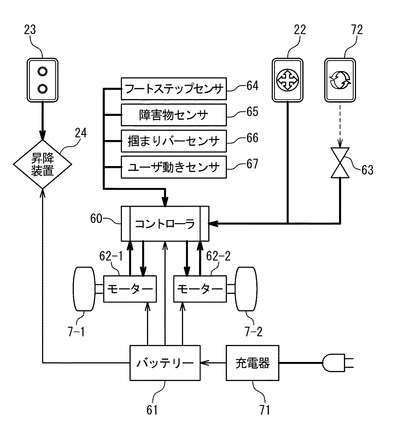
歩行補助椅子本体1は、さらに、図7に示されているように、バッテリー61と複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とを備えている。複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とは、それぞれ、情報伝達可能にそのコントローラ60に接続されている。
【0044】
バッテリー61は、二次電池から形成され、車両フレーム5または昇降フレーム12に支持されている。バッテリー61は、昇降装置24と複数のモータ62−1〜62−2とコントローラ60とに電力供給可能に接続されている。このとき、昇降装置24のアクチュエータ25は、バッテリー61により供給される電力を用いて、部材36を移動させる。バッテリー61は、充電器71に電気的に接続されることにより、充電される。
【0045】
複数のモータ62−1〜62−2は、それぞれ、車両フレーム5に固定されている。複数のモータ62−1〜62−2のうちの左側モータ62−1は、コントローラ60に制御されることにより、バッテリー61から供給される電力を用いて、複数の後輪7−1〜7−2のうちの左後輪7−1を所定の回転速度で回転させ、または、左後輪7−1の回転を停止させる。複数のモータ62−1〜62−2のうちの右側モータ62−2は、コントローラ60に制御されることにより、バッテリー61から供給される電力を用いて、複数の後輪7−1〜7−2のうちの右後輪7−2を所定の回転速度で回転させ、または、右後輪7−2の回転を停止させる。
【0046】
このとき、歩行補助椅子本体1は、複数のモータ62−1〜62−2が左後輪7−1と右後輪7−2とを同じ向きに同じ速さで回転させることにより、進行方向10に平行に移動することができる。歩行補助椅子本体1は、さらに、複数のモータ62−1〜62−2が左後輪7−1と右後輪7−2とを異なる回転速度で回転させることにより、回転したり、カーブを描いて移動したりことができる。
【0047】
受信機63は、車両フレーム5または昇降フレーム12に支持されている。受信機63は、コントローラ60に制御されることにより、送信機72から発信された電波を受信し、その電波が示す情報をコントローラ60に出力する。送信機72は、ユーザに操作されることにより、複数の情報のうちの1つの情報を示す電波を発信する。その複数の情報は、移動情報と充電情報とを含んでいる。その移動情報は、方向と速さとを示している。なお、その電波は、その情報を伝送することができる他の情報伝送媒体に置換されることができる。その情報伝送媒体としては、赤外線が例示される。
【0048】
フートステップセンサ64は、車両フレーム5に支持されている。フートステップセンサ64は、コントローラ60に制御されることにより、複数のフートステップ11−1〜11−2の姿勢を測定し、その姿勢をコントローラ60に出力する。
【0049】
障害物センサ65は、車両フレーム5に支持されている。障害物センサ65は、コントローラ60に制御されることにより、赤外線を発信し、その赤外線の反射波を受信することにより歩行補助椅子本体1の移動を阻害する障害物の有無を測定し、その有無をコントローラ60に出力する。なお、その赤外線は、その障害物の有無を検出することができる他の媒体に置換されることができる。その媒体としては、超音波が例示される。
【0050】
掴まりバーセンサ66は、複数のアームレスト16−1〜16−2に支持されている。掴まりバーセンサ66は、コントローラ60に制御されることにより、掴まりバー17の開閉状態を測定し、その開閉状態をコントローラ60に出力する。その開閉状態は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを示している。
【0051】
ユーザ動きセンサ67は、車両フレーム5に支持されている。ユーザ動きセンサ67は、コントローラ60に制御されることにより、歩行補助椅子本体1を歩行器として利用しているユーザの足に赤外線を照射し、その赤外線の反射波を受信することによりその足の動きを測定し、その動きをコントローラ60に出力する。このことに依って、歩行補助椅子本体1の動きを追随させる。なお、ユーザ動きセンサ67は、そのユーザの足と異なる他の部位の動きを測定する他のユーザ動きセンサに置換されることもできる。その部位としては、そのユーザの上体が例示される。このとき、そのユーザ動きセンサは、そのユーザを昇降座面18または背もたれ15に拘束するシートベルトの動きに基づいてその上体の動きを測定することもできる。
【0052】
図8は、コントローラ60を示している。コントローラ60は、コンピュータであり、図示されていないCPUと記憶装置とインターフェースとを備え、バッテリー61から供給される電力を用いて動作する。そのCPUは、そのコンピュータにインストールされているコンピュータプログラムを実行することにより、その記憶装置とそのインターフェースとを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUにより作成される情報を一時的に記録する。
【0053】
そのインターフェースは、そのコンピュータに接続されている外部機器により生成される情報をそのCPUに出力したり、そのCPUにより生成された情報をその外部機器に出力したりする。その外部機器としては、入力装置、出力装置、通信装置、リムーバルメモリドライブが例示される。その入力装置は、ユーザに操作されることにより情報を作成し、その情報をそのCPUに出力する。その入力装置としては、キーボード、ポインティングデバイス、タッチパネルが例示される。その出力装置は、そのCPUにより生成される情報をユーザに認識可能に出力する。その出力装置としては、ディスプレイ、タッチパネルが例示される。その通信装置は、通信ネットワークを介してそのCPUにより作成された情報を他のコンピュータに送信し、その通信ネットワークを介して他のコンピュータから受信された情報をそのCPUに出力する。その通信装置は、さらに、そのコンピュータにインストールされるコンピュータプログラムを他のコンピュータからダウンロードすることに利用される。そのリムーバルメモリドライブは、記録媒体が挿入されたときに、その記録媒体に記録されているデータを読み出すことに利用される。そのリムーバルメモリドライブは、さらに、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムをそのコンピュータにインストールするときに利用される。その記録媒体としては、磁気ディスク(フレキシブルディスク、ハードディスク)、光ディスク(CD、DVD)、フラッシュメモリが例示される。
【0054】
コントローラ60は、そのインターフェースを介して、ジョイスティック22と操作パネル23と受信機63とに接続されている。コントローラ60は、さらに、そのインターフェースを介して、フートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とに接続されている。コントローラ60は、さらに、そのインターフェースを介して、昇降装置24と複数のモータ62−1〜62−2とに接続されている。
【0055】
コントローラ60にインストールされるコンピュータプログラムは、コントローラ60に複数の機能をそれぞれ実現させる複数のコンピュータプログラムから形成されている。その複数の機能は、車椅子制御部81と立ち上がり補助部82と歩行補助部83と着席補助部84と遠隔制御部85とを含んでいる。
【0056】
車椅子制御部81は、昇降座面18が配置されている位置が測定されるように、アクチュエータ25を制御する。車椅子制御部81は、昇降座面18がその車椅子位置に配置されているときに、ジョイスティック22を介してユーザにより入力された情報を収集するように、ジョイスティック22を制御する。車椅子制御部81は、その情報が移動情報を示すときに、歩行補助椅子本体1の周辺に配置された障害物の有無が測定されるように、障害物センサ65を制御する。車椅子制御部81は、歩行補助椅子本体1の周辺に障害物がないときに、歩行補助椅子本体1がその移動情報が示す方向にその移動情報が示す速さで移動するように、複数のモータ62−1〜62−2を制御する。車椅子制御部81は、歩行補助椅子本体1の周辺に障害物があるときに、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。
【0057】
車椅子制御部81は、その情報がブレーキ情報を示すときに、複数の後輪7−1〜7−2が回転しないように、すなわち、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。車椅子制御部81は、その情報がブレーキ解放情報を示すときに、複数の後輪7−1〜7−2が自由に回転するように、すなわち、手押しバー8を押すことにより歩行補助椅子本体1が移動することができるように、複数のモータ62−1〜62−2を制御する。
【0058】
立ち上がり補助部82は、操作パネル23を介して入力された情報が立ち上がり補助を示すときに、左側フートステップ11−1の姿勢と右側フートステップ11−2の姿勢とが測定されるように、フートステップセンサ64を制御する。立ち上がり補助部82は、掴まりバー17の開閉状態が測定されるように、掴まりバーセンサ66を制御する。立ち上がり補助部82は、複数のフートステップ11−1〜11−2がそれぞれ歩行器用姿勢に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、昇降座面18が上昇するように、アクチュエータ25を制御する。立ち上がり補助部82は、昇降座面18が配置される位置が測定されるように、アクチュエータ25を制御する。立ち上がり補助部82は、昇降座面18がその歩行器位置に配置されたときに、昇降座面18がその歩行器位置に固定されるように、アクチュエータ25を制御する。
【0059】
歩行補助部83は、昇降座面18が配置される位置が測定されるように、アクチュエータ25を制御する。歩行補助部83は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかが測定されるように、掴まりバーセンサ66を制御する。歩行補助部83は、歩行補助椅子本体1の周辺に配置される障害物の有無が測定されるように、障害物センサ65を制御する。歩行補助部83は、ユーザの足の動きが測定されるように、ユーザ動きセンサ67を制御する。歩行補助部83は、その動きに基づいて方向と速さとを算出する。
【0060】
歩行補助部83は、昇降座面18がその歩行器位置に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、かつ、歩行補助椅子本体1の周辺に障害物がないときに、歩行補助椅子本体1がその方向にその速さで移動するように、複数のモータ62−1〜62−2を制御する。
【0061】
着席補助部84は、操作パネル23を介して入力された情報が着席補助を示すときに、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかが測定されるように、掴まりバーセンサ66を制御する。着席補助部84は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。着席補助部84は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、さらに、昇降座面18が下降するように、アクチュエータ25を制御する。
【0062】
遠隔制御部85は、送信機72から発信される信号を受信するように、受信機63を制御する。遠隔制御部85は、送信機72から発信される信号が移動情報を示すときに、その移動情報が示す方向にその移動情報が示す速度で歩行補助椅子本体1が移動するように、複数のモータ62−1〜62−2を制御する。遠隔制御部85は、送信機72から発信される信号が充電情報を示すときに、充電器71が配置される位置が測定されるように、障害物センサ65を制御する。遠隔制御部85は、充電器71が歩行補助椅子本体1の周辺に配置されているときに、歩行補助椅子本体1が移動することによりバッテリー61が充電器71に電気的に接続されるように、すなわち、バッテリー61が充電されるように、複数のモータ62−1〜62−2を制御する。
【0063】
本発明による歩行補助椅子により実行される動作は、車椅子動作と立ち上がり補助動作と歩行補助動作と着席補助動作と遠隔制御動作とを含んでいる。
【0064】
その車椅子動作は、ユーザによりジョイスティック22が操作されたときに実行される。コントローラ60は、ユーザによりジョイスティック22が操作されたときに、アクチュエータ25を制御することにより、昇降座面18が配置されている位置を測定する。コントローラ60は、昇降座面18がその車椅子位置に配置されているときに、ジョイスティック22を介してユーザにより入力された情報を収集する。コントローラ60は、その情報が移動情報を示しているときに、障害物センサ65を制御することにより、歩行補助椅子本体1の周辺に配置された障害物の有無を測定する。コントローラ60は、歩行補助椅子本体1の周辺に障害物がないときに、複数のモータ62−1〜62−2を制御することにより、その移動情報が示す方向にその移動情報が示す速さで歩行補助椅子本体1を移動させる。コントローラ60は、歩行補助椅子本体1の周辺に障害物があるときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動しないように歩行補助椅子本体1を停止させる。
【0065】
さらに、コントローラ60は、ジョイスティック22を介して入力された情報がブレーキ情報を示すときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動しないように、複数の後輪7−1〜7−2の回転を停止させる。コントローラ60は、ジョイスティック22を介して入力された情報がブレーキ解放情報を示すときに、複数のモータ62−1〜62−2を制御することにより、手押しバー8を押すことにより歩行補助椅子本体1が移動することができるように、複数の後輪7−1〜7−2が自由に回転するようにする。
【0066】
このような車椅子制御動作によれば、ユーザは、歩行補助椅子本体1を車椅子として利用するときに、昇降座面18と複数の退避座面19−1〜19−2とから形成される比較的大きい座面にゆったりと座ることができ、より長時間着席することができる。このような車椅子制御動作によれば、ユーザは、さらに、ジョイスティック22を操作することにより、より快適に移動することができる。このような車椅子制御動作によれば、ユーザは、さらに、ジョイスティック22を誤って操作した場合でも、障害物にぶつかることが防止され、より快適に移動することができる。このような車椅子制御動作によれば、ジョイスティック22を介してブレーキ解放情報が入力されたときに、座面14に座るユーザ(被介護者)を介護する介護者は、手押しバー8を押すことにより、歩行補助椅子本体1を床上で自在に移動させることができ、歩行補助椅子本体1をいわゆる車椅子として利用することができる。
【0067】
その立ち上がり補助動作は、ユーザにより操作パネル23を介して立ち上がり補助が入力されたときに実行される。コントローラ60は、操作パネル23を介して入力された情報が立ち上がり補助を示すときに、フートステップセンサ64を制御することにより、左側フートステップ11−1の姿勢と右側フートステップ11−2の姿勢とを測定する。コントローラ60は、さらに、掴まりバーセンサ66を制御することにより、掴まりバー17の開閉状態を測定する。コントローラ60は、複数のフートステップ11−1〜11−2がそれぞれ歩行器用姿勢に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、アクチュエータ25を制御することにより、昇降座面18を上昇させる。このとき、複数の退避座面19−1〜19−2は、座面退避装置51により、昇降座面18より鉛直下側に配置されるように、移動する。コントローラ60は、アクチュエータ25を制御することにより、昇降座面18が配置される位置を測定する。コントローラ60は、昇降座面18がその歩行器位置に配置されたときに、アクチュエータ25を制御することにより、昇降座面18をその歩行器位置に固定する。
【0068】
このような立ち上がり補助動作によれば、ユーザは、その車椅子位置に配置された昇降座面18に座った状態から立ち上がるときに、そのユーザの臀部を昇降座面18に押し上げられ、より小さい力で立ち上がることができ、より容易に立ち上がることができる。すなわち、本発明による歩行補助椅子は、そのユーザがより小さい力で立ち上がることができるように、ユーザの立ち上がりを補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、複数のフートステップ11−1〜11−2にユーザが足を乗せた状態でそのユーザの臀部を昇降座面18で押し上げられることを防止し、足が床に着いた状態でユーザが立ち上がることを誘導することができ、ユーザの立ち上がりをより適切に補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、ユーザが立ち上がるときに歩行補助椅子本体1が移動することが防止され、ユーザの立ち上がりをより適切に補助することができる。
【0069】
その歩行補助動作は、昇降座面18がその歩行器位置に配置されているときに実行される。すなわち、コントローラ60は、アクチュエータ25を制御することにより、昇降座面18が配置される位置を測定する。コントローラ60は、さらに、掴まりバーセンサ66を制御することにより、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを測定する。コントローラ60は、障害物センサ65を制御することにより、歩行補助椅子本体1の周辺に配置される障害物の有無を測定する。コントローラ60は、ユーザ動きセンサ67を制御することにより、歩行補助椅子本体1を歩行器として利用しているユーザの足の動きを測定する。
【0070】
コントローラ60は、その動きに基づいて方向と速さとを算出する。コントローラ60は、昇降座面18がその歩行器位置に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、かつ、歩行補助椅子本体1の周辺に障害物がないときに、複数のモータ62−1〜62−2を制御することにより、その方向にその速さで歩行補助椅子本体1を移動させる。
【0071】
このような歩行補助動作によれば、ユーザは、歩行補助椅子本体1を歩行器として利用しているときに、少し腰を落とすだけで昇降座面に座ることができ、または、昇降座面18に体重をかけながら歩行することができる。このため、このような歩行補助椅子は、ユーザの立ち作業を補助することに利用されることもできる。このような歩行補助椅子は、歩行器として利用されているときに、さらに、車椅子として利用されるときに形成される車椅子用座面より小さくなるようにその昇降座面を形成することができ、ユーザの歩行を阻害する部分を低減することができる。このため、このような歩行補助椅子は、ユーザが歩行することをより適切に補助することができる。このような歩行補助動作によれば、本発明による歩行補助椅子は、ユーザが誤った方向に歩行した場合でも、障害物にぶつかることを防止し、ユーザの歩行をより適切に補助することができる。
【0072】
その着席補助動作は、操作パネル23を介して着席補助が入力されたときに実行される。コントローラ60は、操作パネル23を介して入力された情報が着席補助を示すときに、掴まりバーセンサ66を制御することにより、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを測定する。コントローラ60は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、複数のモータ62−1〜62−2を制御することにより、複数の後輪7−1〜7−2が回転しないように停止させ、歩行補助椅子本体1が移動しないようにする。コントローラ60は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、アクチュエータ25を制御することにより、昇降座面18を下降させる。このとき、座面退避装置51は、昇降座面18が下降しているときに、複数の退避座面19−11〜19−2を回転させ、昇降座面18が車椅子位置に配置されたときに、複数の退避座面19−11〜19−2が昇降座面18を挟むように配置されるように、すなわち、座面14が形成されるように、複数の退避座面19−11〜19−2を固定する。
【0073】
このような着席補助動作によれば、ユーザは、その歩行器位置に配置された昇降座面18に座った状態からさらに座るときに、そのユーザの臀部を昇降座面18によりゆっくり下ろされ、より小さい力で座ることができ、より容易に座ることができる。すなわち、本発明による歩行補助椅子は、そのユーザがより小さい力で座ることができるように、ユーザの着席を補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、ユーザが座るときに歩行補助椅子本体1が移動することが防止され、ユーザの着席をより適切に補助することができる。
【0074】
その遠隔制御動作は、送信機72から発信される信号を受信したときに実行される。コントローラ60は、送信機72から発信される信号が移動情報を示すときに、複数のモータ62−1〜62−2を制御することにより、その移動情報が示す方向にその移動情報が示す速度で歩行補助椅子本体1を移動させる。コントローラ60は、送信機72から発信される信号が充電情報を示すときに、障害物センサ65を制御することにより、充電器71が配置される位置を測定する。コントローラ60は、充電器71が歩行補助椅子本体1の周辺に配置されているときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動することによりバッテリー61が充電器71に電気的に接続されるように、すなわち、バッテリー61が充電されるように、歩行補助椅子本体1を移動させる。
【0075】
このような遠隔制御動作によれば、ユーザは、ユーザが歩行補助椅子本体1から降りたときにも、送信機72を操作することにより、歩行補助椅子本体1を自在に移動させることができる。
【0076】
なお、座面退避装置51は、昇降フレーム12の移動にリンクしないで、複数の退避座面19−1〜19−2を回転させる他の座面退避装置に置換されることができる。その座面退避装置は、コントローラ60に制御されることにより、座面退避装置51と同様にして、複数の退避座面19−1〜19−2を移動させる。本発明による歩行補助椅子は、このような座面退避装置が適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0077】
複数の退避座面19−1〜19−2は、回転軸21と異なる他の回転軸を中心に回転可能に支持されることもできる。その回転軸としては、進行方向10に平行であり、昇降座面18の両脇に配置される回転軸が例示される。複数の退避座面19−1〜19−2は、回転移動以外の移動により、歩行補助椅子本体1が歩行器として用いられるときに、ユーザの歩行を阻害しない他の位置に移動する他の複数の退避座面に置換されることができる。その移動としては、平行移動、平行移動と回転移動の組み合わせが例示される。その位置としては、昇降座面18の進行方向10の反対側が例示される。本発明による歩行補助椅子は、このような複数の退避座面が適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0078】
なお、座面昇降装置24は、椅子ダンパに置換されることもできる。その椅子ダンパは、レバーを備え、そのレバーが引かれているときに、ユーザが昇降座面18に体重をかけることにより昇降座面18を下降させ、ユーザが昇降座面18から腰を浮かせることにより昇降座面18を上昇させる。本発明による歩行補助椅子は、このような椅子ダンパが適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0079】
なお、歩行補助椅子本体1は、コントローラ60と複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とのうちのいずれかの部品を省略することもできる。本発明による歩行補助椅子は、その部品が省略されたときに、その部品を利用した動作ができないが、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【符号の説明】
【0080】
1 :歩行補助椅子本体
2 :車両部分
5 :車両フレーム
6−1〜6−2:複数の前輪
7−1〜7−2:複数の後輪
8 :手押しバー
10:進行方向
11−1〜11−2:複数のフートステップ
12:昇降フレーム
14:座面
15:背もたれ
16−1〜16−2:複数のアームレスト
17:掴まりバー
18:昇降座面
19−1〜19−2:複数の退避座面
21:回転軸
22:ジョイスティック
23:操作パネル
24:昇降装置
25:アクチュエータ
26:パンタグラフ
31〜39:複数の部材
40〜49:回転軸
51:座面退避装置
52:車
53:椅子座ベース
54:回転軸
55:ガイドレール
60:コントローラ
61:バッテリー
62−1〜62−2:複数のモータ
63:受信機
64:フートステップセンサ
65:障害物センサ
66:掴まりバーセンサ
67:ユーザ動きセンサ
71:充電器
72:送信機
81:車椅子制御部
82:立ち上がり補助部
83:歩行補助部
84:着席補助部
85:遠隔制御部
【技術分野】
【0001】
本発明は、歩行補助椅子に関し、特に、車椅子としても歩行器としても利用することができる歩行補助椅子に関する。
【背景技術】
【0002】
起立したユーザの上体を支持することにより、そのユーザの歩行を補助する歩行器が知られている。その歩行器は、歩行障害を有するユーザのリハビリテーションに利用されることもある。座っているユーザは、その歩行器を利用する前に立ち上がる必要がある。その歩行器を利用しているユーザは、疲労等により椅子に座りたくなったときに、椅子の近くまで移動する必要がある。このような歩行器は、このような負担をより軽減することが望まれ、ユーザが歩行することをより適切に補助することが望まれている。
【0003】
特開2001−321404号公報には、1台で車椅子としても利用でき、また、歩行器としても利用できるハンドリム付き手動歩行器兼用車椅子が開示されている。その歩行器兼用車椅子は、利用者が着座するための座部を備えており、この座部が上下方向に移動可能とされており、座部が下方に位置するときは車椅子として利用可能であり、座部が上方に位置するときは歩行器として利用可能であるように構成されている。
【0004】
特開平10−179644号公報には、ベースとなる従来の椅子に起立の補助となるメカニズムが組付けられた起立補助椅子が開示されている。その起立補助椅子は、脚の後方上部に背もたれを有し、左右に肘掛けを有する椅子であって、座部を奥行の短い前座部と、これより奥行の長い後座部とに分割して構成し、該後座部の前端下部と前記前座部の後端部とを屈曲自在なヒンジにより連結し、前記後座部の前端下部と脚側とを前リンクで連結するとともに前記後座部の後端下部と脚側とを後リンクで連結して平行リンクを構成し、前記後座部の前後方向中間部と脚の後方下部とをガススプリングで連結してなり、該ガススプリングの伸長時に後座部がほぼ平行移動して上昇するとともに前座部の前部が自重により前方に垂れ下がるようにしたことを特徴としている。
【0005】
特開2011−87611号公報には、要介護者が無理なく座り姿勢から立ち姿勢に移れるのはもちろんのこと、いたずらな重量の増大化と製造コストの高騰化を回避し得て、その汎用性の向上を期待するのに最適となる起立援助椅子が開示されている。その起立援助椅子は、要介護者を着座させる座部およびこの座部に連続して要介護者の背を支える背凭れを有する椅子と、この椅子に連結されて駆動手段の駆動でこの椅子を昇降させる昇降機構とを有してなる起立援助椅子において、上記の昇降機構で上昇した上記の椅子における座部の上記の背凭れに近隣する後側部における上昇位置の方が上記の椅子における座部の上記の背凭れから離れる前側部における上昇位置より高くなることを特徴としている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−321404号公報
【特許文献2】特開平10−179644号公報
【特許文献3】特開2011−87611号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、ユーザの歩行をより適切に補助する歩行補助椅子を提供することにある。
本発明の他の課題は、ユーザが歩くときに、ユーザの足の運びを邪魔しないようにした歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザが楽に起立したり、ユーザが着席したりすることをより適切に補助する歩行補助椅子を提供することにある。
本発明のさらに他の課題は、通常の椅子と同様に腰全体を保持し、長時間座ることができる歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザがより容易に利用することができる歩行補助椅子を提供することにある。
本発明のさらに他の課題は、ユーザが立ち仕事をするときに、そのユーザの足腰の安定を継続して補助する歩行補助椅子を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による歩行補助椅子は、床を移動する車両部分(2)と、昇降可能に車両部分(2)に支持される昇降座面(18)と、車椅子位置に配置されるように昇降座面(18)を車両部分(2)に固定したり、その車椅子位置より鉛直上側の歩行器位置に配置されるように昇降座面(18)を車両部分(2)に固定したりする座面昇降装置(24)と、退避座面(19−1〜19−2)と、座面退避装置(51)とを備えている。座面退避装置(51)は、昇降座面(18)がその車椅子位置に固定されているときに、昇降座面(18)と退避座面(19−1〜19−2)とが車椅子用座面(14)を形成するように、昇降座面(18)に対して所定の位置に退避座面(19−1〜19−2)を固定する。座面退避装置(51)は、昇降座面(18)がその歩行器位置に固定されているときに、昇降座面(18)に対してその所定の位置と異なる他の位置に退避座面(19−1〜19−2)を配置する。退避座面(19−1〜19−2)は、昇降座面(18)の前方で連結されていてもかまわない。
【0010】
ユーザは、このような歩行補助椅子を歩行器として利用しているときに、少し腰を落とすだけで昇降座面(18)に座ることができ、または、昇降座面(18)に体重をかけながら歩行することができる。このような歩行補助椅子は、歩行器として利用されているときに、さらに、車椅子として利用されるときに形成される車椅子用座面(14)より小さくなるように昇降座面(18)を形成することができ、ユーザの歩行を阻害する部分を低減することができる。このため、このような歩行補助椅子は、ユーザが歩行することをより適切に補助することができる。
【0011】
退避座面(19−1〜19−2)は、左側退避座面(19−1)と右側退避座面(19−2)とを備えている。昇降座面(18)は、昇降座面(18)がその車椅子位置に固定されているときに、左側退避座面(19−1)と右側退避座面(19−2)との間に配置される。ユーザは、このような歩行補助椅子を歩行器として利用しているときに、昇降座面(18)を跨ぐようにして歩行し、少し腰を落としたときにより確実に昇降座面(18)に座ることができる。このような歩行補助椅子は、ユーザが昇降座面(18)に跨いで座っているときに、昇降座面(18)を昇降させることにより、ユーザが起立したり、ユーザが着席したりすることをより適切に補助することができる。
【0012】
座面昇降装置(24)は、昇降座面(18)を昇降させることにより、昇降座面(18)をその車椅子位置に配置したり、昇降座面(18)をその歩行器位置に配置したりする。このような歩行補助椅子は、ユーザが昇降座面(18)に座っているときに昇降座面(18)を昇降させることにより、ユーザが起立したり、ユーザが着席したりすることをより適切に補助することができる。
【0013】
本発明による歩行補助椅子は、昇降座面(18)に対して固定されたり、取り外されたりすることができる掴まりバー(17)と、掴まりバー(17)が昇降座面(18)に対して固定されているかどうかを測定する掴まりバーセンサ(66)と、掴まりバー(17)が固定されていないときに、昇降座面(18)が車両部分(2)に対して昇降しないように、座面昇降装置(24)を制御する補助部(82、84)とをさらに備えている。このような歩行補助椅子によれば、ユーザは、掴まりバー(17)に掴まりながら起立したり、着席したりすることができる。このような歩行補助椅子は、さらに、ユーザが掴まりバー(17)に掴まっていないときに昇降座面(18)を昇降させないことにより、ユーザが起立したり、着席したりすることをより適切に補助することができる。
【0014】
座面昇降装置(24)は、固定部材(5)に対して可動部材(36)を移動させるアクチュエータ(25)と、固定部材(5)に対する可動部材(36)の移動を車両部分(2)に対する昇降座面(18)の移動に変換するパンタグラフ(26)とを備えている。このような歩行補助椅子は、可動部材(36)の移動範囲が昇降座面(18)の移動範囲より小さいときに、座面昇降装置(24)をより小型化することができ、ユーザの歩行・着席を阻害する部分を低減することができる。
【0015】
座面退避装置(51)は、車両部分(2)に対する昇降座面(18)の移動を昇降座面(18)に対する退避座面(19−1〜19−2)の移動に変換することにより、昇降座面(18)に対して退避座面(19−1〜19−2)を移動させるリンク機構であることが好ましい。
【0016】
本発明による歩行補助椅子は、ユーザの動きを測定するユーザ動きセンサ(67)と、車両部分(2)を推進させる推進装置(62−1〜62−2)と、昇降座面(18)がその歩行器位置に配置されているときに、その動きに基づいて算出された方向に車両部分(2)が移動するように、推進装置(62−1〜62−2)を制御する歩行補助部(83)とをさらに備えている。このような歩行補助椅子は、歩行器として利用されるときに、ユーザが歩行補助椅子を押す力を低減することができ、ユーザが歩行することをより適切に補助することができる。
【0017】
本発明による歩行補助椅子は、送信機(72)から発信された信号を受信する受信機(63)と、その信号が示しているように車両部分(2)が移動するように、推進装置(62−1〜62−2)を制御する遠隔制御部(85)とをさらに備えている。このような歩行補助椅子は、ユーザが歩行補助椅子から降りたときにも、送信機(72)を操作することにより、歩行補助椅子を自在に移動させることができ、ユーザをより適切に補助することができる。
【発明の効果】
【0018】
本発明による歩行補助椅子は、車椅子として利用されるときに比較的大きい座面でユーザを支持し、歩行器として利用されるときに比較的小さい座面でユーザを支持することにより、ユーザの歩行をより適切に補助することができる。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明による歩行補助椅子を示す斜視図である。
【図2】図2は、歩行器として利用される歩行補助椅子を示す斜視図である。
【図3】図3は、座面昇降装置を示す断面図である。
【図4】図4は、昇降座面を少し上昇させた座面昇降装置を示す断面図である。
【図5】図5は、座面退避装置を示す断面図である。
【図6】図6は、退避座面を少し下降させた座面退避装置を示す断面図である。
【図7】図7は、本発明による歩行補助椅子を示すブロック図である。
【図8】図8は、コントローラを示すブロック図である。
【発明を実施するための形態】
【0020】
図面を参照して、本発明による歩行補助椅子の実施の形態を記載する。その歩行補助椅子は、歩行補助椅子本体とコントローラとを備えている。その歩行補助椅子本体1は、図1に示されているように、車両部分2を備えている。車両部分2は、床を移動可能に構成され、車両フレーム5と複数の前輪6−1〜6−2と複数の後輪7−1〜7−2とを備えている。複数の前輪6−1〜6−2と複数の後輪7−1〜7−2とは、車両フレーム5が床に接触しないように、車両フレーム5を支持している。複数の前輪6−1〜6−2は、それぞれ、いわゆる自在式キャスターであり、車輪に形成され、回転軸を中心に回転可能に車両フレーム5に支持されている。その回転軸は、鉛直方向に垂直であり、鉛直方向に平行である他の回転軸を中心に回転可能である。複数の後輪7−1〜7−2は、それぞれ、車輪に形成され、回転軸を中心に回転可能に車両フレーム5に支持されている。その回転軸は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。このとき、車両部分2は、複数の前輪6−1〜6−2と複数の後輪7−1〜7−2との車輪が回転することにより、床上を移動することができる。
【0021】
歩行補助椅子本体1は、さらに、手押しバー8を備えている。手押しバー8は、車両フレーム5に固定されている。ユーザや介護者は、手押しバー8を押すことにより、歩行補助椅子本体1を床上で自在に移動させることができる。
【0022】
歩行補助椅子本体1は、さらに、昇降フレーム12と座面14と背もたれ15と複数のアームレスト16−1〜16−2と掴まりバー17と複数のフートステップ11−1〜11−2とを備えている。昇降フレーム12は、鉛直方向に平行移動可能に、車両フレーム5に支持されている。座面14は、板状に形成され、本発明による歩行補助椅子を車椅子として利用するユーザが座る座面に形成されている。座面14は、昇降フレーム12に支持されている。
【0023】
背もたれ15は、板状に形成され、ユーザが座面14に着席したときに、ユーザの背中が接触するように、配置されている。背もたれ15は、回転軸を中心に回転可能に、昇降フレーム12に支持されている。その回転軸は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。背もたれ15は、さらに、図示されていないレバーとリクライニング機構とを備えている。そのリクライニング機構は、そのレバーがユーザにより引かれているときに、ユーザの操作により背もたれ15が回転することができるように、背もたれ15を昇降フレーム12に支持する。そのリクライニング機構は、そのレバーからユーザの手が離れているときに、背もたれ15がその回転軸を中心に回転しないように、背もたれ15を昇降フレーム12に固定する。
【0024】
複数のフートステップ11−1〜11−2は、それぞれ、板状に形成され、足置き面が形成されている。複数のフートステップ11−1〜11−2は、それぞれ、複数の姿勢のいずれかの姿勢に配置されることができるように、回転軸を中心に回転可能にフレームに支持されている。その複数の姿勢は、車椅子用姿勢と歩行器用姿勢とを含んでいる。複数のフートステップ11−1〜11−2は、その車椅子用姿勢に配置されているときに、その足置き面が鉛直上側を向くように、すなわち、座面14に着席したユーザの足がその足置き面に置かれることができるように、配置されている。複数のフートステップ11−1〜11−2は、その歩行器用姿勢に配置されているときに、その足置き面が水平方向を向くように、すなわち、座面14に着席したユーザの足が複数のフートステップ11−1〜11−2にぶつからないで床に置かれることができるように、配置されている。
【0025】
複数のアームレスト16−1〜16−2は、座面14に着席したユーザの肘を掛けることができるように、配置され、昇降フレーム12に支持されている。
【0026】
掴まりバー17は、棒状に形成されている。掴まりバー17は、座面14に着席したユーザの前方を横切るように、配置され、取り外し可能に、複数のアームレスト16−1〜16−2に支持されている。
【0027】
歩行補助椅子本体1は、さらに、ジョイスティック22と操作パネル23とを備えている。ジョイスティック22は、座面14に座るユーザの右手が届くように、右側アームレスト16−2に固定されている。ジョイスティック22は、ユーザに操作されることにより、複数の情報のうちの1つの情報を作成する。その複数の情報は、移動情報とブレーキ情報とブレーキ解放情報とを含んでいる。その移動情報は、方向と速さとを示している。操作パネル23は、座面14に座るユーザの左手が届くように、左側アームレスト16−1に固定されている。操作パネル23は、ユーザに操作されることにより、複数の情報のうちの1つを示す情報を作成する。その複数の情報は、立ち上がり補助と着席補助とを含んでいる。なお、ジョイスティック22と操作パネル23とは、左右入れ替えて複数のアームレスト16−1〜16−2に取り付けられることもできる。
【0028】
座面14は、昇降座面18と複数の退避座面19−1〜19−2とを備えている。昇降座面18は、進行方向10に長い概ね矩形状に形成され、座面14の中央の部分に形成されている。昇降座面18は、昇降フレーム12に固定されている。すなわち、昇降座面18は、昇降フレーム12が昇降することにより、複数の位置に配置されることができる。その複数の位置は、車椅子位置と歩行器位置とを含んでいる。その車椅子位置は、その複数の位置のうちの最も鉛直下側の位置である。その歩行器位置は、その複数の位置のうちのその車椅子位置より鉛直上側の位置であり、ユーザの体格に基づいて設定されたユーザに適した位置である。
【0029】
複数の退避座面19−1〜19−2は、それぞれ、板状に形成されている。複数の退避座面19−1〜19−2のうちの左側退避座面19−1は、座面14の左側の部分に形成されている。複数の退避座面19−1〜19−2のうちの右側退避座面19−2は、座面14の右側の部分に形成されている。すなわち、座面14は、昇降座面18が複数の退避座面19−1〜19−2に挟まれるように配置されることにより、形成される。
【0030】
複数の退避座面19−1〜19−2は、さらに、昇降フレーム12に固定されている回転軸21を中心に回転可能に、昇降フレーム12に支持されている。回転軸21は、鉛直方向に垂直であり、進行方向10に垂直であり、座面14の進行方向10の反対側に配置されている。
【0031】
複数の退避座面19−1〜19−2は、このように構成されていることにより、昇降座面図2に示されているように、昇降座面18より鉛直下側に配置されることができる。
【0032】
歩行補助椅子本体1は、図2に示されているように、さらに、座面昇降装置24を備えている。座面昇降装置24は、アクチュエータ25とパンタグラフ26とを備えている。
【0033】
図3は、パンタグラフ26を示している。パンタグラフ26は、複数の部材31〜39を備えている。部材31は、車両フレーム5に固定されている。部材32は、部材31に固定されている回転軸40を中心に回転可能に、部材31に支持されている。回転軸40は、鉛直方向に垂直であり、かつ、進行方向10に垂直である。部材33は、部材31に固定されている回転軸41を中心に回転可能に、部材31に支持されている。回転軸41は、回転軸40に平行であり、回転軸40から進行方向10に所定の距離だけ離れるように、配置されている。
【0034】
部材34は、部材32に固定されている回転軸42を中心に回転可能に、部材32に支持されている。回転軸42は、回転軸40に平行である。部材35は、部材33に固定されている回転軸43を中心に回転可能に、部材33に支持されている。回転軸43は、回転軸41に平行である。このとき、部材33は、回転軸41から回転軸43までの距離が回転軸40から回転軸42までの距離に等しくなるように、形成されている。部材36は、部材34に固定されている回転軸44を中心に回転可能に、部材34に支持され、部材35に固定されている回転軸45を中心に回転可能に、部材35に支持されている。回転軸44は、回転軸42に平行である。回転軸45は、回転軸43に平行である。このとき、部材35は、回転軸43から回転軸45までの距離が回転軸42から回転軸44までの距離に等しくなるように、形成されている。
【0035】
部材37は、部材32に固定されている回転軸46を中心に回転可能に、部材32に支持されている。回転軸46は、回転軸40に平行である。このとき、部材32は、回転軸40から回転軸46までの距離が回転軸40から回転軸42までの距離より長くなるように、形成されている。部材38は、部材33に固定されている回転軸47を中心に回転可能に、部材33に支持されている。回転軸47は、回転軸41に平行である。このとき、部材33は、回転軸41から回転軸47までの距離が回転軸40から回転軸46までの距離に等しくなるように、形成されている。
【0036】
部材39は、昇降フレーム12に固定されている。部材39は、さらに、部材37に固定されている回転軸48を中心に回転可能に、部材37に支持され、部材38に固定されている回転軸49を中心に回転可能に、部材38に支持されている。回転軸48は、回転軸46に平行である。回転軸49は、回転軸47に平行である。このとき、部材38は、回転軸47から回転軸49までの距離が回転軸46から回転軸48までの距離に等しくなるように、形成されている。
【0037】
パンタグラフ26は、このように形成されることにより、部材36が鉛直方向に平行に所定の距離だけ移動されたときに、部材39を鉛直方向に、その所定の距離より長い距離移動させることができる。
【0038】
アクチュエータ25は、そのコントローラに制御されることにより、車両フレーム5に対して部材36を鉛直方向に平行に移動させる。
【0039】
パンタグラフ26は、このように形成されることにより、アクチュエータ25により、部材36が鉛直上方に所定の距離だけ移動したときに、図4に示されているように、その所定の距離よりも長い距離だけ部材39が鉛直上方に移動する。このとき、部材39が移動した距離は、部材36が移動した距離に1対1に対応し、たとえば、部材36が移動した距離に正比例する。このため、アクチュエータ25は、部材36を移動させた量を測定することにより、間接的に昇降座面18の位置を測定することができる。アクチュエータ25は、そのコントローラに制御されることにより、昇降座面18の位置を測定し、その位置をそのコントローラに出力する。
【0040】
歩行補助椅子本体1は、さらに、図5に示されているように、座面退避装置51を備えている。座面退避装置51は、車52と椅子座ベース53とを備えている。椅子座ベース53は、左側退避座面19−1に固定されている。椅子座ベース53は、ガイドレール55が形成されている。車52は、ガイドレール55に接触するように、配置されている。車52は、車両フレーム5に固定されている回転軸54を中心に回転可能に、車両フレーム5に支持されている。回転軸54は、回転軸21に平行である。
【0041】
車52は、図6に示されているように、昇降フレーム12が車両フレーム5に対して鉛直上方に移動したときに、ガイドレール55に沿って移動する。椅子座ベース53は、車52がガイドレール55に沿って移動することにより、左側退避座面19−1が昇降座面18より鉛直下側に配置されるように、回転軸21を中心に回転する。
【0042】
歩行補助椅子本体1は、さらに、図示されていない他の座面退避装置を備えている。その座面退避装置は、座面退避装置51と同様にして、車両フレーム5に対して鉛直方向に昇降フレーム12が移動することにリンクして、回転軸21を中心に右側退避座面19−2を回転させる。
【0043】
歩行補助椅子本体1は、さらに、図7に示されているように、バッテリー61と複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とを備えている。複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とは、それぞれ、情報伝達可能にそのコントローラ60に接続されている。
【0044】
バッテリー61は、二次電池から形成され、車両フレーム5または昇降フレーム12に支持されている。バッテリー61は、昇降装置24と複数のモータ62−1〜62−2とコントローラ60とに電力供給可能に接続されている。このとき、昇降装置24のアクチュエータ25は、バッテリー61により供給される電力を用いて、部材36を移動させる。バッテリー61は、充電器71に電気的に接続されることにより、充電される。
【0045】
複数のモータ62−1〜62−2は、それぞれ、車両フレーム5に固定されている。複数のモータ62−1〜62−2のうちの左側モータ62−1は、コントローラ60に制御されることにより、バッテリー61から供給される電力を用いて、複数の後輪7−1〜7−2のうちの左後輪7−1を所定の回転速度で回転させ、または、左後輪7−1の回転を停止させる。複数のモータ62−1〜62−2のうちの右側モータ62−2は、コントローラ60に制御されることにより、バッテリー61から供給される電力を用いて、複数の後輪7−1〜7−2のうちの右後輪7−2を所定の回転速度で回転させ、または、右後輪7−2の回転を停止させる。
【0046】
このとき、歩行補助椅子本体1は、複数のモータ62−1〜62−2が左後輪7−1と右後輪7−2とを同じ向きに同じ速さで回転させることにより、進行方向10に平行に移動することができる。歩行補助椅子本体1は、さらに、複数のモータ62−1〜62−2が左後輪7−1と右後輪7−2とを異なる回転速度で回転させることにより、回転したり、カーブを描いて移動したりことができる。
【0047】
受信機63は、車両フレーム5または昇降フレーム12に支持されている。受信機63は、コントローラ60に制御されることにより、送信機72から発信された電波を受信し、その電波が示す情報をコントローラ60に出力する。送信機72は、ユーザに操作されることにより、複数の情報のうちの1つの情報を示す電波を発信する。その複数の情報は、移動情報と充電情報とを含んでいる。その移動情報は、方向と速さとを示している。なお、その電波は、その情報を伝送することができる他の情報伝送媒体に置換されることができる。その情報伝送媒体としては、赤外線が例示される。
【0048】
フートステップセンサ64は、車両フレーム5に支持されている。フートステップセンサ64は、コントローラ60に制御されることにより、複数のフートステップ11−1〜11−2の姿勢を測定し、その姿勢をコントローラ60に出力する。
【0049】
障害物センサ65は、車両フレーム5に支持されている。障害物センサ65は、コントローラ60に制御されることにより、赤外線を発信し、その赤外線の反射波を受信することにより歩行補助椅子本体1の移動を阻害する障害物の有無を測定し、その有無をコントローラ60に出力する。なお、その赤外線は、その障害物の有無を検出することができる他の媒体に置換されることができる。その媒体としては、超音波が例示される。
【0050】
掴まりバーセンサ66は、複数のアームレスト16−1〜16−2に支持されている。掴まりバーセンサ66は、コントローラ60に制御されることにより、掴まりバー17の開閉状態を測定し、その開閉状態をコントローラ60に出力する。その開閉状態は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを示している。
【0051】
ユーザ動きセンサ67は、車両フレーム5に支持されている。ユーザ動きセンサ67は、コントローラ60に制御されることにより、歩行補助椅子本体1を歩行器として利用しているユーザの足に赤外線を照射し、その赤外線の反射波を受信することによりその足の動きを測定し、その動きをコントローラ60に出力する。このことに依って、歩行補助椅子本体1の動きを追随させる。なお、ユーザ動きセンサ67は、そのユーザの足と異なる他の部位の動きを測定する他のユーザ動きセンサに置換されることもできる。その部位としては、そのユーザの上体が例示される。このとき、そのユーザ動きセンサは、そのユーザを昇降座面18または背もたれ15に拘束するシートベルトの動きに基づいてその上体の動きを測定することもできる。
【0052】
図8は、コントローラ60を示している。コントローラ60は、コンピュータであり、図示されていないCPUと記憶装置とインターフェースとを備え、バッテリー61から供給される電力を用いて動作する。そのCPUは、そのコンピュータにインストールされているコンピュータプログラムを実行することにより、その記憶装置とそのインターフェースとを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUにより作成される情報を一時的に記録する。
【0053】
そのインターフェースは、そのコンピュータに接続されている外部機器により生成される情報をそのCPUに出力したり、そのCPUにより生成された情報をその外部機器に出力したりする。その外部機器としては、入力装置、出力装置、通信装置、リムーバルメモリドライブが例示される。その入力装置は、ユーザに操作されることにより情報を作成し、その情報をそのCPUに出力する。その入力装置としては、キーボード、ポインティングデバイス、タッチパネルが例示される。その出力装置は、そのCPUにより生成される情報をユーザに認識可能に出力する。その出力装置としては、ディスプレイ、タッチパネルが例示される。その通信装置は、通信ネットワークを介してそのCPUにより作成された情報を他のコンピュータに送信し、その通信ネットワークを介して他のコンピュータから受信された情報をそのCPUに出力する。その通信装置は、さらに、そのコンピュータにインストールされるコンピュータプログラムを他のコンピュータからダウンロードすることに利用される。そのリムーバルメモリドライブは、記録媒体が挿入されたときに、その記録媒体に記録されているデータを読み出すことに利用される。そのリムーバルメモリドライブは、さらに、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムをそのコンピュータにインストールするときに利用される。その記録媒体としては、磁気ディスク(フレキシブルディスク、ハードディスク)、光ディスク(CD、DVD)、フラッシュメモリが例示される。
【0054】
コントローラ60は、そのインターフェースを介して、ジョイスティック22と操作パネル23と受信機63とに接続されている。コントローラ60は、さらに、そのインターフェースを介して、フートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とに接続されている。コントローラ60は、さらに、そのインターフェースを介して、昇降装置24と複数のモータ62−1〜62−2とに接続されている。
【0055】
コントローラ60にインストールされるコンピュータプログラムは、コントローラ60に複数の機能をそれぞれ実現させる複数のコンピュータプログラムから形成されている。その複数の機能は、車椅子制御部81と立ち上がり補助部82と歩行補助部83と着席補助部84と遠隔制御部85とを含んでいる。
【0056】
車椅子制御部81は、昇降座面18が配置されている位置が測定されるように、アクチュエータ25を制御する。車椅子制御部81は、昇降座面18がその車椅子位置に配置されているときに、ジョイスティック22を介してユーザにより入力された情報を収集するように、ジョイスティック22を制御する。車椅子制御部81は、その情報が移動情報を示すときに、歩行補助椅子本体1の周辺に配置された障害物の有無が測定されるように、障害物センサ65を制御する。車椅子制御部81は、歩行補助椅子本体1の周辺に障害物がないときに、歩行補助椅子本体1がその移動情報が示す方向にその移動情報が示す速さで移動するように、複数のモータ62−1〜62−2を制御する。車椅子制御部81は、歩行補助椅子本体1の周辺に障害物があるときに、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。
【0057】
車椅子制御部81は、その情報がブレーキ情報を示すときに、複数の後輪7−1〜7−2が回転しないように、すなわち、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。車椅子制御部81は、その情報がブレーキ解放情報を示すときに、複数の後輪7−1〜7−2が自由に回転するように、すなわち、手押しバー8を押すことにより歩行補助椅子本体1が移動することができるように、複数のモータ62−1〜62−2を制御する。
【0058】
立ち上がり補助部82は、操作パネル23を介して入力された情報が立ち上がり補助を示すときに、左側フートステップ11−1の姿勢と右側フートステップ11−2の姿勢とが測定されるように、フートステップセンサ64を制御する。立ち上がり補助部82は、掴まりバー17の開閉状態が測定されるように、掴まりバーセンサ66を制御する。立ち上がり補助部82は、複数のフートステップ11−1〜11−2がそれぞれ歩行器用姿勢に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、昇降座面18が上昇するように、アクチュエータ25を制御する。立ち上がり補助部82は、昇降座面18が配置される位置が測定されるように、アクチュエータ25を制御する。立ち上がり補助部82は、昇降座面18がその歩行器位置に配置されたときに、昇降座面18がその歩行器位置に固定されるように、アクチュエータ25を制御する。
【0059】
歩行補助部83は、昇降座面18が配置される位置が測定されるように、アクチュエータ25を制御する。歩行補助部83は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかが測定されるように、掴まりバーセンサ66を制御する。歩行補助部83は、歩行補助椅子本体1の周辺に配置される障害物の有無が測定されるように、障害物センサ65を制御する。歩行補助部83は、ユーザの足の動きが測定されるように、ユーザ動きセンサ67を制御する。歩行補助部83は、その動きに基づいて方向と速さとを算出する。
【0060】
歩行補助部83は、昇降座面18がその歩行器位置に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、かつ、歩行補助椅子本体1の周辺に障害物がないときに、歩行補助椅子本体1がその方向にその速さで移動するように、複数のモータ62−1〜62−2を制御する。
【0061】
着席補助部84は、操作パネル23を介して入力された情報が着席補助を示すときに、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかが測定されるように、掴まりバーセンサ66を制御する。着席補助部84は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、歩行補助椅子本体1が移動しないように、複数のモータ62−1〜62−2を制御する。着席補助部84は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、さらに、昇降座面18が下降するように、アクチュエータ25を制御する。
【0062】
遠隔制御部85は、送信機72から発信される信号を受信するように、受信機63を制御する。遠隔制御部85は、送信機72から発信される信号が移動情報を示すときに、その移動情報が示す方向にその移動情報が示す速度で歩行補助椅子本体1が移動するように、複数のモータ62−1〜62−2を制御する。遠隔制御部85は、送信機72から発信される信号が充電情報を示すときに、充電器71が配置される位置が測定されるように、障害物センサ65を制御する。遠隔制御部85は、充電器71が歩行補助椅子本体1の周辺に配置されているときに、歩行補助椅子本体1が移動することによりバッテリー61が充電器71に電気的に接続されるように、すなわち、バッテリー61が充電されるように、複数のモータ62−1〜62−2を制御する。
【0063】
本発明による歩行補助椅子により実行される動作は、車椅子動作と立ち上がり補助動作と歩行補助動作と着席補助動作と遠隔制御動作とを含んでいる。
【0064】
その車椅子動作は、ユーザによりジョイスティック22が操作されたときに実行される。コントローラ60は、ユーザによりジョイスティック22が操作されたときに、アクチュエータ25を制御することにより、昇降座面18が配置されている位置を測定する。コントローラ60は、昇降座面18がその車椅子位置に配置されているときに、ジョイスティック22を介してユーザにより入力された情報を収集する。コントローラ60は、その情報が移動情報を示しているときに、障害物センサ65を制御することにより、歩行補助椅子本体1の周辺に配置された障害物の有無を測定する。コントローラ60は、歩行補助椅子本体1の周辺に障害物がないときに、複数のモータ62−1〜62−2を制御することにより、その移動情報が示す方向にその移動情報が示す速さで歩行補助椅子本体1を移動させる。コントローラ60は、歩行補助椅子本体1の周辺に障害物があるときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動しないように歩行補助椅子本体1を停止させる。
【0065】
さらに、コントローラ60は、ジョイスティック22を介して入力された情報がブレーキ情報を示すときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動しないように、複数の後輪7−1〜7−2の回転を停止させる。コントローラ60は、ジョイスティック22を介して入力された情報がブレーキ解放情報を示すときに、複数のモータ62−1〜62−2を制御することにより、手押しバー8を押すことにより歩行補助椅子本体1が移動することができるように、複数の後輪7−1〜7−2が自由に回転するようにする。
【0066】
このような車椅子制御動作によれば、ユーザは、歩行補助椅子本体1を車椅子として利用するときに、昇降座面18と複数の退避座面19−1〜19−2とから形成される比較的大きい座面にゆったりと座ることができ、より長時間着席することができる。このような車椅子制御動作によれば、ユーザは、さらに、ジョイスティック22を操作することにより、より快適に移動することができる。このような車椅子制御動作によれば、ユーザは、さらに、ジョイスティック22を誤って操作した場合でも、障害物にぶつかることが防止され、より快適に移動することができる。このような車椅子制御動作によれば、ジョイスティック22を介してブレーキ解放情報が入力されたときに、座面14に座るユーザ(被介護者)を介護する介護者は、手押しバー8を押すことにより、歩行補助椅子本体1を床上で自在に移動させることができ、歩行補助椅子本体1をいわゆる車椅子として利用することができる。
【0067】
その立ち上がり補助動作は、ユーザにより操作パネル23を介して立ち上がり補助が入力されたときに実行される。コントローラ60は、操作パネル23を介して入力された情報が立ち上がり補助を示すときに、フートステップセンサ64を制御することにより、左側フートステップ11−1の姿勢と右側フートステップ11−2の姿勢とを測定する。コントローラ60は、さらに、掴まりバーセンサ66を制御することにより、掴まりバー17の開閉状態を測定する。コントローラ60は、複数のフートステップ11−1〜11−2がそれぞれ歩行器用姿勢に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、アクチュエータ25を制御することにより、昇降座面18を上昇させる。このとき、複数の退避座面19−1〜19−2は、座面退避装置51により、昇降座面18より鉛直下側に配置されるように、移動する。コントローラ60は、アクチュエータ25を制御することにより、昇降座面18が配置される位置を測定する。コントローラ60は、昇降座面18がその歩行器位置に配置されたときに、アクチュエータ25を制御することにより、昇降座面18をその歩行器位置に固定する。
【0068】
このような立ち上がり補助動作によれば、ユーザは、その車椅子位置に配置された昇降座面18に座った状態から立ち上がるときに、そのユーザの臀部を昇降座面18に押し上げられ、より小さい力で立ち上がることができ、より容易に立ち上がることができる。すなわち、本発明による歩行補助椅子は、そのユーザがより小さい力で立ち上がることができるように、ユーザの立ち上がりを補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、複数のフートステップ11−1〜11−2にユーザが足を乗せた状態でそのユーザの臀部を昇降座面18で押し上げられることを防止し、足が床に着いた状態でユーザが立ち上がることを誘導することができ、ユーザの立ち上がりをより適切に補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、ユーザが立ち上がるときに歩行補助椅子本体1が移動することが防止され、ユーザの立ち上がりをより適切に補助することができる。
【0069】
その歩行補助動作は、昇降座面18がその歩行器位置に配置されているときに実行される。すなわち、コントローラ60は、アクチュエータ25を制御することにより、昇降座面18が配置される位置を測定する。コントローラ60は、さらに、掴まりバーセンサ66を制御することにより、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを測定する。コントローラ60は、障害物センサ65を制御することにより、歩行補助椅子本体1の周辺に配置される障害物の有無を測定する。コントローラ60は、ユーザ動きセンサ67を制御することにより、歩行補助椅子本体1を歩行器として利用しているユーザの足の動きを測定する。
【0070】
コントローラ60は、その動きに基づいて方向と速さとを算出する。コントローラ60は、昇降座面18がその歩行器位置に配置されているときに、かつ、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、かつ、歩行補助椅子本体1の周辺に障害物がないときに、複数のモータ62−1〜62−2を制御することにより、その方向にその速さで歩行補助椅子本体1を移動させる。
【0071】
このような歩行補助動作によれば、ユーザは、歩行補助椅子本体1を歩行器として利用しているときに、少し腰を落とすだけで昇降座面に座ることができ、または、昇降座面18に体重をかけながら歩行することができる。このため、このような歩行補助椅子は、ユーザの立ち作業を補助することに利用されることもできる。このような歩行補助椅子は、歩行器として利用されているときに、さらに、車椅子として利用されるときに形成される車椅子用座面より小さくなるようにその昇降座面を形成することができ、ユーザの歩行を阻害する部分を低減することができる。このため、このような歩行補助椅子は、ユーザが歩行することをより適切に補助することができる。このような歩行補助動作によれば、本発明による歩行補助椅子は、ユーザが誤った方向に歩行した場合でも、障害物にぶつかることを防止し、ユーザの歩行をより適切に補助することができる。
【0072】
その着席補助動作は、操作パネル23を介して着席補助が入力されたときに実行される。コントローラ60は、操作パネル23を介して入力された情報が着席補助を示すときに、掴まりバーセンサ66を制御することにより、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているかどうかを測定する。コントローラ60は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、複数のモータ62−1〜62−2を制御することにより、複数の後輪7−1〜7−2が回転しないように停止させ、歩行補助椅子本体1が移動しないようにする。コントローラ60は、掴まりバー17が複数のアームレスト16−1〜16−2に固定されているときに、アクチュエータ25を制御することにより、昇降座面18を下降させる。このとき、座面退避装置51は、昇降座面18が下降しているときに、複数の退避座面19−11〜19−2を回転させ、昇降座面18が車椅子位置に配置されたときに、複数の退避座面19−11〜19−2が昇降座面18を挟むように配置されるように、すなわち、座面14が形成されるように、複数の退避座面19−11〜19−2を固定する。
【0073】
このような着席補助動作によれば、ユーザは、その歩行器位置に配置された昇降座面18に座った状態からさらに座るときに、そのユーザの臀部を昇降座面18によりゆっくり下ろされ、より小さい力で座ることができ、より容易に座ることができる。すなわち、本発明による歩行補助椅子は、そのユーザがより小さい力で座ることができるように、ユーザの着席を補助することができる。このような立ち上がり補助動作によれば、本発明による歩行補助椅子は、さらに、ユーザが座るときに歩行補助椅子本体1が移動することが防止され、ユーザの着席をより適切に補助することができる。
【0074】
その遠隔制御動作は、送信機72から発信される信号を受信したときに実行される。コントローラ60は、送信機72から発信される信号が移動情報を示すときに、複数のモータ62−1〜62−2を制御することにより、その移動情報が示す方向にその移動情報が示す速度で歩行補助椅子本体1を移動させる。コントローラ60は、送信機72から発信される信号が充電情報を示すときに、障害物センサ65を制御することにより、充電器71が配置される位置を測定する。コントローラ60は、充電器71が歩行補助椅子本体1の周辺に配置されているときに、複数のモータ62−1〜62−2を制御することにより、歩行補助椅子本体1が移動することによりバッテリー61が充電器71に電気的に接続されるように、すなわち、バッテリー61が充電されるように、歩行補助椅子本体1を移動させる。
【0075】
このような遠隔制御動作によれば、ユーザは、ユーザが歩行補助椅子本体1から降りたときにも、送信機72を操作することにより、歩行補助椅子本体1を自在に移動させることができる。
【0076】
なお、座面退避装置51は、昇降フレーム12の移動にリンクしないで、複数の退避座面19−1〜19−2を回転させる他の座面退避装置に置換されることができる。その座面退避装置は、コントローラ60に制御されることにより、座面退避装置51と同様にして、複数の退避座面19−1〜19−2を移動させる。本発明による歩行補助椅子は、このような座面退避装置が適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0077】
複数の退避座面19−1〜19−2は、回転軸21と異なる他の回転軸を中心に回転可能に支持されることもできる。その回転軸としては、進行方向10に平行であり、昇降座面18の両脇に配置される回転軸が例示される。複数の退避座面19−1〜19−2は、回転移動以外の移動により、歩行補助椅子本体1が歩行器として用いられるときに、ユーザの歩行を阻害しない他の位置に移動する他の複数の退避座面に置換されることができる。その移動としては、平行移動、平行移動と回転移動の組み合わせが例示される。その位置としては、昇降座面18の進行方向10の反対側が例示される。本発明による歩行補助椅子は、このような複数の退避座面が適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0078】
なお、座面昇降装置24は、椅子ダンパに置換されることもできる。その椅子ダンパは、レバーを備え、そのレバーが引かれているときに、ユーザが昇降座面18に体重をかけることにより昇降座面18を下降させ、ユーザが昇降座面18から腰を浮かせることにより昇降座面18を上昇させる。本発明による歩行補助椅子は、このような椅子ダンパが適用されたときも、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【0079】
なお、歩行補助椅子本体1は、コントローラ60と複数のモータ62−1〜62−2と受信機63とフートステップセンサ64と障害物センサ65と掴まりバーセンサ66とユーザ動きセンサ67とのうちのいずれかの部品を省略することもできる。本発明による歩行補助椅子は、その部品が省略されたときに、その部品を利用した動作ができないが、既述の実施の形態における歩行補助椅子と同様にして、ユーザの歩行をより適切に補助することができる。
【符号の説明】
【0080】
1 :歩行補助椅子本体
2 :車両部分
5 :車両フレーム
6−1〜6−2:複数の前輪
7−1〜7−2:複数の後輪
8 :手押しバー
10:進行方向
11−1〜11−2:複数のフートステップ
12:昇降フレーム
14:座面
15:背もたれ
16−1〜16−2:複数のアームレスト
17:掴まりバー
18:昇降座面
19−1〜19−2:複数の退避座面
21:回転軸
22:ジョイスティック
23:操作パネル
24:昇降装置
25:アクチュエータ
26:パンタグラフ
31〜39:複数の部材
40〜49:回転軸
51:座面退避装置
52:車
53:椅子座ベース
54:回転軸
55:ガイドレール
60:コントローラ
61:バッテリー
62−1〜62−2:複数のモータ
63:受信機
64:フートステップセンサ
65:障害物センサ
66:掴まりバーセンサ
67:ユーザ動きセンサ
71:充電器
72:送信機
81:車椅子制御部
82:立ち上がり補助部
83:歩行補助部
84:着席補助部
85:遠隔制御部
【特許請求の範囲】
【請求項1】
床を移動する車両部分と、
昇降可能に前記車両部分に支持される昇降座面と、
車椅子位置に配置されるように前記昇降座面を前記車両部分に固定したり、前記車椅子位置より鉛直上側の歩行器位置に配置されるように前記昇降座面を前記車両部分に固定したりする座面昇降装置と、
退避座面と、
座面退避装置とを具備し、
前記座面退避装置は、
前記昇降座面が前記車椅子位置に固定されているときに、前記昇降座面と前記退避座面とが車椅子用座面を形成するように、前記昇降座面に対して所定の位置に前記退避座面を固定し、
前記昇降座面が前記歩行器位置に固定されているときに、前記昇降座面に対して前記所定の位置と異なる他の位置に前記退避座面を配置する
歩行補助椅子。
【請求項2】
請求項1において、
前記退避座面は、左側退避座面と右側退避座面とを備え、
前記昇降座面は、前記昇降座面が前記車椅子位置に固定されているときに、前記左側退避座面と前記右側退避座面との間に配置される
歩行補助椅子。
【請求項3】
請求項1〜請求項2のいずれか一項において、
前記座面昇降装置は、前記昇降座面を昇降させることにより、前記昇降座面を前記車椅子位置に配置したり、前記昇降座面を前記歩行器位置に配置したりする
歩行補助椅子。
【請求項4】
請求項3において、
前記昇降座面に対して固定されたり、取り外されたりすることができる掴まりバーと、
前記掴まりバーが前記昇降座面に対して固定されているかどうかを測定する掴まりバーセンサと、
前記掴まりバーが固定されていないときに、前記昇降座面が前記車両部分に対して昇降しないように、前記座面昇降装置を制御する補助部
とをさらに具備する歩行補助椅子。
【請求項5】
請求項3〜請求項4のいずれか一項において、
前記座面昇降装置は、
固定部材に対して可動部材を移動させるアクチュエータと、
前記固定部材に対する可動部材の移動を前記車両部分に対する前記昇降座面の移動に変換するパンタグラフとを備える
歩行補助椅子。
【請求項6】
請求項3〜請求項5のいずれか一項において、
前記座面退避装置は、前記車両部分に対する前記昇降座面の移動を前記昇降座面に対する前記退避座面の移動に変換することにより、前記昇降座面に対して前記退避座面を移動させる
歩行補助椅子。
【請求項7】
請求項1〜請求項6のいずれか一項において、
ユーザの動きを測定するユーザ動きセンサと、
前記車両部分を推進させる推進装置と、
前記昇降座面が前記歩行器位置に配置されているときに、前記動きに基づいて算出された方向に前記車両部分が移動するように、前記推進装置を制御する歩行補助部
とをさらに具備する歩行補助椅子。
【請求項8】
請求項1〜請求項7のいずれか一項において、
送信機から発信された信号を受信する受信機と、
前記信号が示すように前記車両部分が移動するように、前記推進装置を制御する遠隔制御部
とをさらに具備する歩行補助椅子。
【請求項1】
床を移動する車両部分と、
昇降可能に前記車両部分に支持される昇降座面と、
車椅子位置に配置されるように前記昇降座面を前記車両部分に固定したり、前記車椅子位置より鉛直上側の歩行器位置に配置されるように前記昇降座面を前記車両部分に固定したりする座面昇降装置と、
退避座面と、
座面退避装置とを具備し、
前記座面退避装置は、
前記昇降座面が前記車椅子位置に固定されているときに、前記昇降座面と前記退避座面とが車椅子用座面を形成するように、前記昇降座面に対して所定の位置に前記退避座面を固定し、
前記昇降座面が前記歩行器位置に固定されているときに、前記昇降座面に対して前記所定の位置と異なる他の位置に前記退避座面を配置する
歩行補助椅子。
【請求項2】
請求項1において、
前記退避座面は、左側退避座面と右側退避座面とを備え、
前記昇降座面は、前記昇降座面が前記車椅子位置に固定されているときに、前記左側退避座面と前記右側退避座面との間に配置される
歩行補助椅子。
【請求項3】
請求項1〜請求項2のいずれか一項において、
前記座面昇降装置は、前記昇降座面を昇降させることにより、前記昇降座面を前記車椅子位置に配置したり、前記昇降座面を前記歩行器位置に配置したりする
歩行補助椅子。
【請求項4】
請求項3において、
前記昇降座面に対して固定されたり、取り外されたりすることができる掴まりバーと、
前記掴まりバーが前記昇降座面に対して固定されているかどうかを測定する掴まりバーセンサと、
前記掴まりバーが固定されていないときに、前記昇降座面が前記車両部分に対して昇降しないように、前記座面昇降装置を制御する補助部
とをさらに具備する歩行補助椅子。
【請求項5】
請求項3〜請求項4のいずれか一項において、
前記座面昇降装置は、
固定部材に対して可動部材を移動させるアクチュエータと、
前記固定部材に対する可動部材の移動を前記車両部分に対する前記昇降座面の移動に変換するパンタグラフとを備える
歩行補助椅子。
【請求項6】
請求項3〜請求項5のいずれか一項において、
前記座面退避装置は、前記車両部分に対する前記昇降座面の移動を前記昇降座面に対する前記退避座面の移動に変換することにより、前記昇降座面に対して前記退避座面を移動させる
歩行補助椅子。
【請求項7】
請求項1〜請求項6のいずれか一項において、
ユーザの動きを測定するユーザ動きセンサと、
前記車両部分を推進させる推進装置と、
前記昇降座面が前記歩行器位置に配置されているときに、前記動きに基づいて算出された方向に前記車両部分が移動するように、前記推進装置を制御する歩行補助部
とをさらに具備する歩行補助椅子。
【請求項8】
請求項1〜請求項7のいずれか一項において、
送信機から発信された信号を受信する受信機と、
前記信号が示すように前記車両部分が移動するように、前記推進装置を制御する遠隔制御部
とをさらに具備する歩行補助椅子。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−85716(P2013−85716A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−229193(P2011−229193)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(592078597)タマチ工業株式会社 (6)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(592078597)タマチ工業株式会社 (6)
[ Back to top ]