
歩行補助装置
【課題】
調節又は設定対象となる制御用のパラメータの数の低減を図りながら、補助対象である人間の運動周期に鑑みて適当な周期で動作することができる装置を提供する。
【解決手段】
各アクチュエータ16のそれぞれの周期動作の位相の制御基礎となる第2位相振動子φ2の算定に際して、人間の上体に対する各大腿の周期運動の位相である第1位相振動子φ1とこの第2位相振動子φ2との偏差と、固有角速度ωとが基礎とされる。第1位相振動子φ1と第2位相振動子φ2との前回偏差δφ(k-1)が目標偏差δφ0に近づくように、前回の固有角速度ω(k-1)を当該前回偏差δφ(k-1)に応じた量だけ補正することによって今回の固有角速度ω(k)が設定される。
調節又は設定対象となる制御用のパラメータの数の低減を図りながら、補助対象である人間の運動周期に鑑みて適当な周期で動作することができる装置を提供する。
【解決手段】
各アクチュエータ16のそれぞれの周期動作の位相の制御基礎となる第2位相振動子φ2の算定に際して、人間の上体に対する各大腿の周期運動の位相である第1位相振動子φ1とこの第2位相振動子φ2との偏差と、固有角速度ωとが基礎とされる。第1位相振動子φ1と第2位相振動子φ2との前回偏差δφ(k-1)が目標偏差δφ0に近づくように、前回の固有角速度ω(k-1)を当該前回偏差δφ(k-1)に応じた量だけ補正することによって今回の固有角速度ω(k)が設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人間の周期運動を補助する装置に関する。
【背景技術】
【0002】
人間の運動周期と、当該人間に力を伝達するように構成されている装置の動作周期との調和を図りながら、当該人間の周期運動を補助する技術的手法が提案されている(特許文献1参照)。
【0003】
ここで、調節又は設定対象となるパラメータの数の低減のため、位相をCPG(Central Pattern Generator)モデルとして用いることが考えられる(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3930399号公報
【非特許文献】
【0005】
【非特許文献1】飯田、近藤、伊藤「位相振動子と軌道生成モデルによる環境適応機構の提案」SICE Symposium on Decentralized Autonomous Systems 18, 271-276, 2006.01.26
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、モデルを過度に簡素化しすぎると、装置の動作周期が、人間の運動周期との調和という観点から不適当なものとなる可能性が高くなる。
【0007】
そこで、本発明は、調節又は設定対象となる制御用のパラメータの数の低減を図りながら、補助対象である人間の運動周期に鑑みて適当な周期で動作することができる装置を提供することを解決課題とする。
【課題を解決するための手段】
【0008】
本発明は、人間の上体に取り付けられる第1装具と、前記人間の左右の脚体のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている一対の関節角度センサと、少なくとも前記一対の関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の脚体の相対的な周期運動を補助する歩行補助装置に関する。
【0009】
前記課題を解決するための本発明の歩行補助装置は、前記制御装置が、前記一対の関節角度センサのそれぞれの出力に基づき、前記人間の上体に対する各大腿の周期運動の位相を第1位相振動子の左右各成分として測定するように構成されている第1位相振動子出力要素と、前記第1位相振動子の左右各成分に対する偏差と、固有角速度の左右各成分とに応じた速度で変化する左右各成分を有する位相を第2位相振動子として算定するように構成されている第2位相振動子出力要素と、前記第1位相振動子の左右各成分と前記第2位相振動子の左右各成分との前回偏差が目標偏差に近づくように、前回の前記固有角速度の左右各成分を当該前回偏差に応じた量だけ補正することによって今回の前記固有角速度の左右各成分を設定するように構成されている固有角速度設定要素と、前記第2位相振動子の左右各成分に変化にしたがって、前記一対のアクチュエータのそれぞれの周期動作の位相を変化させる制御信号を生成するように構成されている制御信号生成要素とを備えていることを特徴とする。
【0010】
本発明の歩行補助装置によれば、制御用のパラメータの数の低減による制御態様の簡素化を図りながらも、人間の周期運動の位相に鑑みて、歩行補助装置の周期動作の位相が適当に制御されうるように固有角速度の値が設定される。
【0011】
具体的には、各アクチュエータのそれぞれの周期動作の位相の制御基礎となる「第2位相振動子」の算定に際して、人間の上体に対する各大腿の周期運動の位相である「第1位相振動子」とこの第2位相振動子との偏差と、「固有角速度」とが基礎とされる。少なくとも当該偏差の各成分及び固有角速度の各成分が調節又は設定対象となる制御用のパラメータに含まれていれば、その他のパラメータは省略されてもよいという比較的緩やかな条件下で、当該パラメータの数の低減を図ることができる。
【0012】
一方、第1位相振動子と第2位相振動子との前回偏差が目標偏差に近づくように、前回の固有角速度を当該前回偏差に応じた量だけ補正することによって今回の固有角速度が設定される。これにより、補助対象である人間の運動周期に鑑みて適当な周期で各アクチュエータを動作させ、かつ、第1装具に対して各第2装具を周期的に動かすことができる。
【0013】
前記制御信号生成要素が、前記人間の脚体の長さに対する目標歩幅の比率に基づき、当該比率を変数とする増加関数にしたがって、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていてもよい。
【0014】
前記制御信号生成要素が、前記人間の脚体の長さと、前記一対の関節角度センサから得られる各股関節角度の時間変化を表わす波形信号とに基づき、前記人間の過去複数周期にわたる平均歩幅を算出した上で、前記平均歩幅と前記人間の目標歩幅との偏差が小さくなるように、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていてもよい。
【0015】
当該構成の歩行補助装置によれば、人間の目標歩幅の大小に応じてアクチュエータの周期動作の振幅、すなわち、第1装具に対する各第2装具の前後方向の変位量の多少が制御されうる。このため、人間の歩幅を目標歩幅に近づけるように、当該人間の歩行運動が補助されうる。
【0016】
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分、及び、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定するように構成されていてもよい。
【0017】
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定するように構成されていてもよい。
【0018】
当該構成の歩行補助装置によれば、第1位相振動子と第2位相振動子との相関係数、第2位相振動子の成分間の相関係数及び固有角速度以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる。その一方、前記のように固有角速度が設定されることにより、補助対象である人間の運動周期に鑑みて適当な周期で歩行補助装置を動作させることができる。
【0019】
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定し、かつ、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されている第2成分を算定するように構成されていてもよい。
【0020】
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定し、前記第2成分としての前記第2位相振動子の左屈曲及び左伸展各成分と、前記第1位相振動子の左成分との相関項、又は、前記第2成分としての前記第2位相振動子の右屈曲及び右伸展各成分と、前記第1位相振動子の右成分との相関項が含まれている、前記第2成分に該当する各成分の微分方程式を解くことにより、前記第2成分を算定するように構成されていてもよい。
【0021】
当該構成の歩行補助装置によれば、第1位相振動子と第2位相振動子の第1成分との相関係数、第2位相振動子の第1成分間の相関係数、第1位相振動子と第2位相振動子の第2成分との相関係数及び固有角速度以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる。その一方、前記のように固有角速度が設定されることにより、補助対象である人間の運動周期に鑑みて適当な周期で歩行補助装置を動作させることができる。
【0022】
前記第1位相振動子出力要素が、前記一対の関節角度センサのそれぞれの出力に基づき、各股関節角度に対する各股関節角速度の比率の逆正接関数を前記第1位相振動子の左右各成分として測定するように構成されていることが好ましい。
【図面の簡単な説明】
【0023】
【図1】本発明の歩行補助装置の構成説明図。
【図2】歩行補助装置の制御装置の構成説明図。
【図3】歩行補助装置の制御方法に関する説明図。
【図4】関節角度及び関節角速度に関する説明図。
【図5】第1位相振動子に関する説明図。
【図6】第1位相振動子及び第2位相振動子の相関関係並びに第2位相振動子の左成分及び第2位相振動子の右成分の相関関係に関する説明図。
【図7】歩行補助装置の第1の性能実験結果に関する説明図。
【図8】歩行補助装置の第2の性能実験結果に関する説明図。
【図9】歩行補助装置の第3の性能実験結果に関する説明図。
【図10】歩行補助装置の第4の性能実験結果に関する説明図。
【図11】歩行補助装置の第5の性能実験結果に関する説明図。
【図12】歩行補助装置の第6の性能実験結果に関する説明図。
【図13】歩行補助装置の第7の性能実験結果に関する説明図。
【図14】歩行補助装置の第8の性能実験結果に関する説明図。
【発明を実施するための形態】
【0024】
(歩行補助装置の構成)
本発明の歩行補助装置の一実施形態としての歩行補助装置について説明する。以下、脚体等の左右を区別するために符号「L」及び「R」を用いるが、左右をまとめて表現する場合又は左右成分を有するベクトルを表現する場合には当該符号を省略する。また、上体に対する各大腿の屈曲運動(前方運動)及び伸展運動(後方運動)を区別するために符号「+」及び「−」を用いる。
【0025】
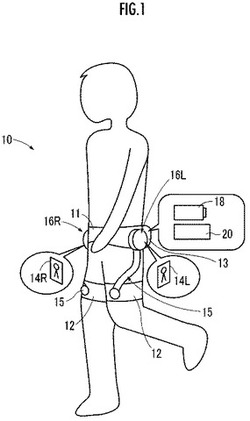
図1に示されている歩行補助装置10は、第1装具11と、左右一対の第2装具12と、左右一対のアクチュエータ16と、バッテリ18と、制御装置20と、股関節角度センサ14とを備えている。
【0026】
第1装具11は、人間又は利用者の上体又は腰部(第1身体部分)に巻き付けられるように装着される。第1装具11のうち少なくとも人間の背中に当接する背後部は、軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により構成され、その他の部分は繊維等の柔軟性素材により構成されている。
【0027】
第2装具12は、繊維等の柔軟性素材により構成され、人間の大腿(第2身体部分)に巻き付けられるように装着される。第2装具12は、大腿に加えて又は代えて下腿に巻き付けられるように装着されてもよい。
【0028】
アクチュエータ16は電動モータにより構成され、必要に応じてモータに加え減速機及びコンプライアンス機構のうち一方又は両方により構成される。アクチュエータ16は第1装具11が上体に取り付けられたとき、上体の左右両側に配置されるように第1装具11に連結されている。アクチュエータ16は、軽量の軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により形成されている連結部材15を介して大腿に装着される第2装具12に連結される。
【0029】
これにより、アクチュエータ16が動作することで、上体及び各大腿の相対運動が補助されるように上体及び各大腿に力が作用する。上体及び各大腿の相対運動には、離床している脚体の大腿の上体に対する前後運動が含まれ、着床している脚体に対する上体の前後運動が含まれる。
【0030】
バッテリ18は制御装置20とともに第1装具11の背後部に取り付けられるケース13に収納されており、アクチュエータ16及び制御装置20等に対して電力を供給する。なお、バッテリ18及び制御装置20のそれぞれ又はこれらを収納するケース13の配置箇所は適宜変更されてもよい。
【0031】
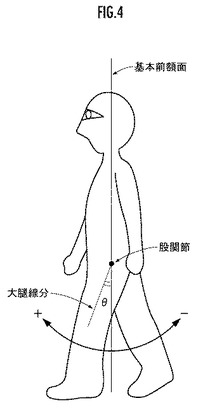
股関節角度センサ14は人間の腰部左右両側に配置されるロータリーエンコーダにより構成され、股関節角度に応じた信号を出力する。股関節角度は、大腿が基本前額面の前方にある場合には正値になり、大腿が基本前額面の後方にある場合には負値になるように定義される。
【0032】
制御装置20はコンピュータ(CPU、ROM、RAM、信号入力回路、信号出力回路等により構成される。)と、このコンピュータのメモリ又は記憶装置に格納されているソフトウェアとにより構成されている。制御装置20は、バッテリ18からアクチュエータ16に対する供給電力を調節するほか、アクチュエータ16の動作を制御する。
【0033】
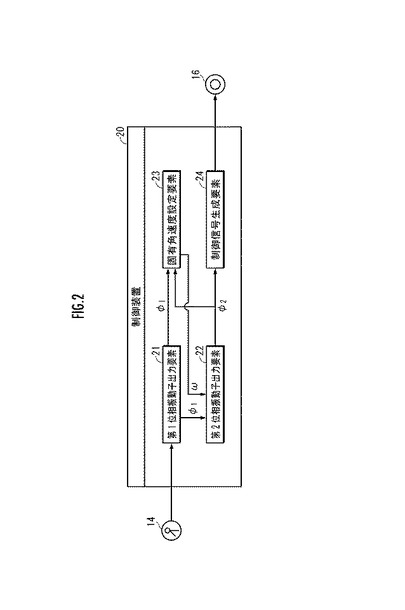
図2に示されているように、制御装置20は、後述の演算処理を実行する又は機能を発揮する第1位相振動子出力要素21と、第2位相振動子出力要素22と、固有角速度設定要素23と、制御信号生成要素24とを備えている。
【0034】
制御装置20の各構成要素が担当演算処理を実行するように「構成されている」とは、記憶装置に格納されている必要なプログラム及びデータを読み取り、当該プログラムにしたがって当該データに対して演算処理を施すことにより、当該担当演算処理を実行するように「プログラムされている」ことを意味する。各構成要素は、単一の演算処理装置により構成されていてもよく、物理的に分離している複数の演算処理装置により構成されていてもよい。
【0035】
運転スイッチ(図示略)が操作され、バッテリ18から制御装置20に対して電力が供給されることにより、制御装置20は次に説明するような諸機能を発揮しうる。
【0036】
(歩行補助装置の機能(第1実施形態))
制御装置20による歩行補助装置10の動作制御方法の第1実施形態について説明する。
【0037】
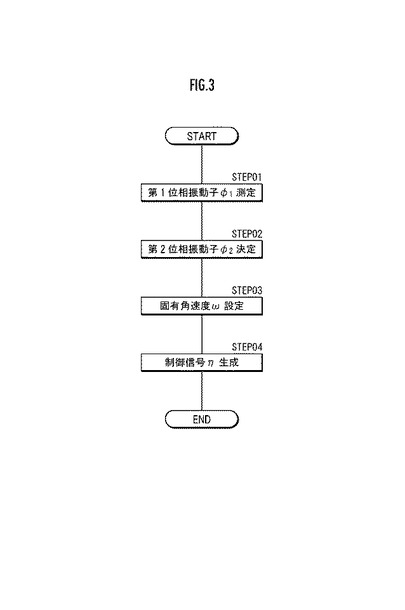
まず、第1位相振動子出力要素21が、股関節角度センサ14の出力に基づき、人間の周期運動の位相を第1位相振動子φ1=(φ1L,φ1R)として測定かつ出力する(図3/STEP01)。
【0038】
股関節角度θは、図4に示されているように、大腿が股関節箇所を一端とする線分とみなされた場合、横から見た当該線分と基本前額面とのなす角度として定義される。基本前額面は、上体が前後方向に傾くことに応じて、左右の股関節箇所を通る軸線回りに回動する。股関節角度θは、大腿を表わす線分が基本前額面の前方にある状態では正値である一方、当該線分が基本前額面より後方にある状態では負値であるように定義されている。このため、股関節角速度(dθ/dt)は、大腿が前方に動いている屈曲運動状態では正値になる一方、大腿が後方に動いている伸展運動状態では負値となる。
【0039】
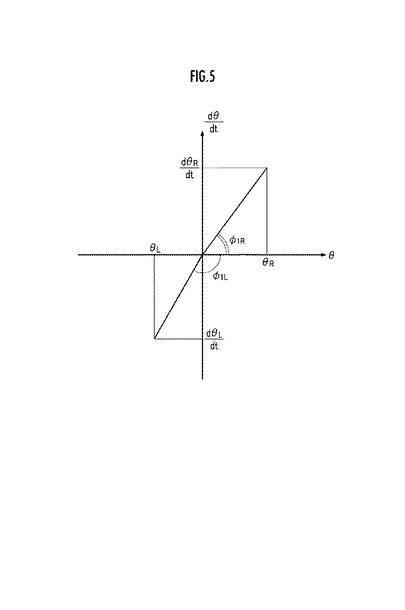
第1位相振動子φ1の左成分φ1Lは、例えば関係式(111)により表され、かつ、図5に模式的に示されているように、左股関節角度θLに対する左股関節角速度(dθL/dt)の比率の逆正接関数として定義される。第1位相振動子φ1の右成分φ1Rは、例えば関係式(112)により表され、かつ、図5に模式的に示されているように、右股関節角度θRに対する右股関節角速度(dθR/dt)の比率の逆正接関数として定義される。
【0040】
φ1L=arctan{(dθL/dt)/θL} ..(111)。
【0041】
φ1R=arctan{(dθR/dt)/θR} ..(112)。
【0042】
第1位相振動子φ1q(q=L,R)は、屈曲運動中に大腿を表わす線分が基本前額面に一致した状態、すなわち、股関節角速度(dθq/dt)が正であり、かつ、股関節角度θqが0である状態で「π/2」になる。第1位相振動子φ1qは、上体に対して脚体又は大腿が最も屈曲した状態、すなわち、股関節角速度(dθq/dt)が0であり、かつ、股関節角度θqが正である状態で「0」になる。
【0043】
第1位相振動子φ1qは、伸展運動中に大腿を表わす線分が基本前額面に一致した状態、すなわち、股関節角速度(dθq/dt)が負であり、かつ、股関節角度θqが0である状態で「−π/2」になる。第1位相振動子φ1qは、上体に対して脚体又は大腿が最も伸展した状態、すなわち、股関節角速度(dθq/dt)が0であり、かつ、股関節角度θqが負である状態で「π」又は「−π」になる。
【0044】
第1位相振動子φ1は、上体に対する各大腿の姿勢及びその変化態様を表わす位相であるともいえる(図5参照)。この意味で、第1位相振動子φ1は、関係式(111)及び(112)に代えて、関係式(113)及び(114)、関係式(115)及び(116)又は関係式(117)及び(118)により定義されてもよい。
【0045】
φ1L=arctan{{H((dθL/dt))−H(-(dθL/dt))}/θL} ..(113)。
【0046】
φ1R=arctan{{H((dθR/dt))−H(-(dθR/dt))}/θR} ..(114)。
【0047】
φ1L=arctan{(dθL/dt)/{H(θL)−H(-θL)}} ..(115)。
【0048】
φ1R=arctan{(dθR/dt)/{H(θR)−H(-θR)}} ..(116)。
【0049】
φ1L=arctan{(dθL/dt)/(dθL/dt)max・θL/θLmax} ..(117)。
【0050】
φ1R=arctan{(dθR/dt)/(dθR/dt)max・θR/θRmax} ..(118)。
【0051】
ここでH(x)はヘヴィサイドの階段関数であり、xが正である場合は1となり、xが0である場合は0又は1/2等の1未満の正数となり、xが負である場合は0となる。(dθL/dt)maxは過去所定周期における左股関節角速度(dθL/dt)の最大値であり、θLmaxは過去所定周期における左股関節角度θLの最大値である。同様に、(dθR/dt)maxは過去所定周期における右股関節角速度(dθR/dt)の最大値であり、θRmaxは過去所定周期における右股関節角度θRの最大値である。
【0052】
また、第2位相振動子出力要素22が、歩行補助装置10の動作周期の位相を第2位相振動子φ2=(φ2L,φ2R)として算定かつ出力する(図3/STEP02)。
【0053】
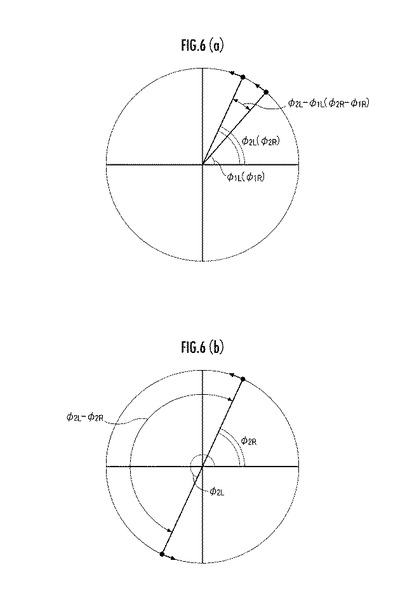
図6(a)に矢印で示されているように、第2位相振動子φ2は、第1位相振動子φ1に対して位相進み(又は位相遅れ)をもって、第1位相振動子φ1とともに時間変化する。
【0054】
また、図6(b)に矢印で示されているように、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rは、位相差を有しながら時間変化する。第2位相振動子の左成分φ2Lは、左アクチュエータ16Lの動作の位相を定める因子である。第2位相振動子の右成分φ2Rは、右アクチュエータ16Rの動作の位相を定める因子である。
【0055】
例えば、連立微分方程式(120)を解くことにより、第2位相振動子φ2の左右各成分φ2L及びφ2Rが算定される。第1実施形態では、固有角速度ωの設定基礎となる「第1成分」と、制御信号ηの生成基礎となる「第2成分」とは同一である。
【0056】
(dφ2L/dt)=ωL+KLsin(φ1L−φ2L)+KLRsin(φ2R−φ2L),
(dφ2R/dt)=ωR+KRsin(φ1R−φ2R)+KLRsin(φ2L−φ2R) ..(120)。
【0057】
今回第2位相振動子φ2(k)(kは制御サイクルの回数を表わす。)の算出に際して、第1位相振動子出力要素21により測定された今回第1位相振動子φ1(k)と、後述するように固有角速度設定要素23により設定された前回固有角速度ω(k-1)とが連立微分方程式(120)に代入される。k=1の場合、初期の固有角速度ω(0)としては記憶装置に保存されている値が用いられる。
【0058】
「KL」は、第1位相振動子の左成分φ1L及び第2位相振動子の左成分φ2Lの相関関係を表わす左相関係数である。右相関係数KLが「正」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を減少させるように第2位相振動子の右成分φ2Rが決定される。左相関係数KLが「負」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を増加させるように第2位相振動子の左成分φ2Lが決定される。
【0059】
「KR」は、第1位相振動子の右成分φ1R及び第2位相振動子の右成分φ2Rの相関関係を表わす右相関係数である。右相関係数KLが「正」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を減少させるように第2位相振動子の右成分φ2Rが決定される。左相関係数KLが「負」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を増加させるように第2位相振動子の左成分φ2Lが決定される。
【0060】
「KLR」は、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rの相関関係を表わす左右相関係数である。左右相関係数KLRは、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rの偏差を「π」に維持する観点から予め適当な値に設定され、又は、第2位相振動子出力要素22によって設定若しくは適宜補正される。
【0061】
さらに、固有角速度設定要素23が、今回第1位相振動子φ1(k)及び今回第2位相振動子φ2(k)の偏差に応じて定まる今回位相差δφ(k)を目標位相差δφ0に一致させるように、次回固有角速度ω(k+1)を設定する(図3/STEP03)。
【0062】
第1位相振動子φ1及び第2位相振動子φ2に基づき、関係式(131)及び(132)にしたがって位相差δφが算定される。
【0063】
δφL=sin(φ1L−φ2L) ..(131)。
【0064】
δφR=sin(φ1R−φ2R) ..(132)。
【0065】
そして、位相差δφが目標位相差δφ0に近づくように、固有角速度ωが仮想的な2つの振動子が含まれている内部モデルにしたがって算定される。
【0066】
具体的には、まず、左右各成分について、位相差δφが第1位相差δφ1として設定され、指定期間(例えば3歩行周期)にわたり第1位相差δφ1が一定であったことを要件として、左右各成分について、関係式(133)及び(134)によって表される「内部モデル」にしたがって、関係式(135)によって表される内部運動振動子θhと内部誘導振動子θmとの位相差θh−θmが第2位相差δφ2として求められる。
【0067】
dθh/dt=ωh+εsin(θm-θh) ..(133)。
【0068】
dθm/dt=ωm+εsin(θh-θm) ..(134)。
【0069】
δφ2=arcsin[(ωh-ωm)/2ε] ..(135)。
【0070】
ここで、ε=(εL,εR)は仮想モデルにおける仮想運動振動子θh=(θhL,θhR)及び仮想誘導振動子θm=(θmL,θmR)の左右成分ごとの相関係数である。また、ωhは仮想運動振動子θhの角速度であり、ωmは仮想誘導振動子θmの角速度である。
【0071】
続いて、第1位相差δφ1と第2位相差δφ2との差δφ1−δφ2が最小になるように相関係数εの値が設定される。具体的には関係式(136)にしたがって、左右各成分について、第1位相振動子φ1が0となる離散的な時間tid(id:整数)における相関係数εが逐次設定される。
【0072】
ε(tid+1)=ε(tid)-η{v(tid+1)-V(tid)}/{ε(tid)-ε(tid-1)},
V(tid+1)≡(1/2){δφ1(tid+1)-δφ2(tid)}2 ..(136)。
【0073】
ここで、η=(ηL,ηR)の各成分は、第1位相差δφ1の左右各成分と、第2位相差δφ2の左右各成分とを近づけるポテンシャルV=(VL,VR)の安定性を表す係数である。
【0074】
次に、相関係数εの当該設定値に基づき、仮想誘導振動子θmの固有角速度ωmが一定であるという条件下で、左右各成分について、第1及び第2位相差の差δφ1−δφ2の各成分が最小となるように仮想運動振動子θhの角速度ωhが関係式(137)にしたがって設定される。
【0075】
ωh(tid)
=−α∫dt([4ε(tid)2-{ωh(t)-ωm(tid)}2]1/2sin[arcsin{(ωh(t)-ωm(tid-1))/2ε(tid)}-δφ1(tid)]) ..(137)。
【0076】
ここで、α=(αL,αR)の各成分は系の安定性を表す係数である。
【0077】
続いて、左右各成分について、仮想運動振動子θhの角速度ωhに基づき、仮想誘導振動子θmの角速度ωmが新たな固有角速度ωとして設定される。具体的には、左右各成分について、第2位相差δφ2が目標位相差δφ0に近づくように、関係式(138)にしたがって仮想誘導振動子θmの角速度ω=(ωL, ωR)の値が設定される。
【0078】
ω(tid)=β∫dt(4ε(tid)2-{ωh(tid)-ωm(t)}2)sin[arcsin{(ωh(tid)-ωm(t))/2ε(tid)}-δφ0]) ..(138)。
【0079】
ここで、β=(βL, βR)の各成分は系の安定性を表す係数である。
【0080】
当該目標位相差δφ0=(δφ0L,δφ0R)は制御装置20に有線通信又は無線通信が可能な操作装置の操作ボタン(図示略)が操作されることにより、任意に設定されうる。
【0081】
なお、位相差δφ(第1位相差δφ1)が目標位相差δφ0から閾値を超えて乖離した場合、又は固有角速度ωの今回値が閾値を超える程度に前回値から大きく変化した場合、固有角速度ωは、適当なゲイン係数λ=(λL,λR)を用いて、関係式(139)にしたがって算定されてもよい。
【0082】
ωL(k+1)=ωL(k)+λL(δφL(k)−δφ0L), ωR(k+1)=ωR(k)+λR(δφR(k)−δφ0R) ..(139)。
【0083】
また、制御信号生成要素24が、第2位相振動子φ2に基づき、制御信号ηを生成する(図3/STEP04)。
【0084】
例えば、第1制御係数C1及び第2制御係数C2に基づき、関係式(141)及び(142)のそれぞれにしたがって制御信号ηが生成される。
【0085】
ηL=C1Lsinφ2L+C2L ..(141)。
【0086】
ηR=C1Rsinφ2R+C2R ..(142)。
【0087】
なお、第1制御係数C1は、位相差δφ(関係式(131)及び(132)参照)に基づき、所定の学習係数γ1=(γ1L,γ1R)が用いられている関係式(1410)にしたがって逐次設定されてもよい。「k」は制御周期を表わす指数である。
【0088】
C1L(k+1)=C1L(k)+γ1L(δφL(k)-δφL(k-1))/(C1L(k)-C1L(k-1)),
C1R(k+1)=C1R(k)+γ1R(δφR(k)-δφR(k-1))/(C1R(k)-C1R(k-1)) ..(1410)。
【0089】
また、第2制御係数C2は、同じく位相差δφに基づき、所定の学習係数γ2=(γ2L,γ2R)が用いられている関係式(1420)にしたがって逐次設定されてもよい。
【0090】
C2L(k+1)=C2L(k)-γ2L(E(k)-E(k-1))/(C2L(k)-C2L(k-1)),
C2R(k+1)=C2R(k)+γ2R(E(k)-E(k-1))/(C2R(k)-C2R(k-1)) ..(1420)。
【0091】
「E(k)」は、目標歩行比Flref及び測定歩行比(過去所定周期にわたる平均値)Flmeasに基づき、関係式(1422)により定義されるエネルギー関数である。
【0092】
E(k)=(1/2)(Flref-Flmeas)2 ..(1422)。
【0093】
第1制御係数C1及び第2制御係数C2のうち少なくとも一方が、位相差δφに代えて第1位相振動子φ1の左右成分の偏差φ1L−φ1Rに基づき、前記関係式にしたがって設定されてもよい。
【0094】
そして、制御装置20により制御信号ηに基づいてバッテリ18から左右のアクチュエータ16L,16Rにそれぞれ供給される電流I=(IL,IR)が調節される。これにより、第1装具11及び第2装具12を介して上体に対する左右の大腿の屈曲運動及び伸展運動を補助する力又は股関節回りの回転力F=(FL,FR)が調節される。補助力Fは電流Iに基づき、たとえばF(t)=G・I(t)(G:比例係数)と表現される。
【0095】
その後、運転スイッチがONからOFFに切り替えられたこと、又は、動作異常が検知されたこと等の動作終了条件が満たされたか否かが判定される。そして、当該判定結果が否定的である場合、前記一連の処理が繰り返される一方、当該判定結果が肯定的である場合、前記一連の処理が終了する。
【0096】
(歩行補助装置の機能(第2実施形態))
制御装置20による歩行補助装置10の動作制御方法の第2実施形態について説明する。第1位相振動子出力要素21による第1位相振動子φ1の測定方法(図3/STEP01)及び固有角速度設定要素23による固有角速度ωの設定方法(図3/STEP03)については第1実施形態と同様なので説明を省略する。
【0097】
第2位相振動子出力要素22は、固有角速度ωの設定基礎となる「第1成分」と、制御信号ηの生成基礎となる「第2成分」とが異なるような第2位相振動子φ2を生成する(図3/STEP02)。
【0098】
具体的には、連立微分方程式(120)の解として、第2位相振動子φ2の第1成分φ21=(φ2L,φ2R)が求められる。さらに、微分方程式(221)〜(224)のそれぞれの解として、第2位相振動子φ2の第2成分φ22=(φ2L+,φ2L-,φ2R+,φ2R-)が求められる。
【0099】
(dφ2L+/dt)=ωL+KLsin(φ1L−φ2L+−ξL+) ..(221)。
【0100】
(dφ2R+/dt)=ωR+KRsin(φ1R−φ2R+−ξR+) ..(222)。
【0101】
(dφ2L-/dt)=ωL+KLsin(φ1L−φ2L-−ξL-) ..(223)。
【0102】
(dφ2R-/dt)=ωR+KRsin(φ1R−φ2R-−ξR-) ..(224)。
【0103】
「ξL+」は、連立微分方程式(120)の解として求められる第2位相振動子の左成分φ2Lに対する第2位相振動子φ2の左屈曲成分φ2L+の目標位相差である。ξL+の値が負値である場合、ξL+が0である場合と比較して、左脚の屈曲開始時点(すなわち伸展終了時点)が早くなる。この場合、ξL+の絶対値が大きくなるほど左脚の屈曲開始時点が早くなる。一方、ξL+の値が正値である場合、ξL+が0である場合と比較して、左脚の屈曲開始時点が遅くなる。この場合、ξL+の絶対値が大きくなるほど左脚の屈曲開始時点が遅くなる。
【0104】
「ξL-」は、第2位相振動子φ2の左成分φ2Lに対する第2位相振動子の左伸展成分φ2L-の目標位相差である。ξL-の値が負値である場合、ξL-が0である場合と比較して、左脚の伸展開始時点(すなわち屈曲終了時点)が早くなる。この場合、ξL-の絶対値が大きくなるほど左脚の伸展開始時点が早くなる。一方、ξL-の値が正値である場合、ξL-が0である場合と比較して、左脚の伸展開始時点が遅くなる。この場合、ξL-の絶対値が大きくなるほど左脚の伸展開始時点が遅くなる。
【0105】
「ξR+」は、連立微分方程式(120)の解として求められる第2位相振動子の右成分φ2Rに対する第2位相振動子φ2の右屈曲成分φ2R+の目標位相差である。ξR+の値が負値である場合、ξR+が0である場合と比較して、右脚の屈曲開始時点(すなわち伸展終了時点)が早くなる。この場合、ξR+の絶対値が大きくなるほど右脚の屈曲開始時点が早くなる。一方、ξR+の値が正値である場合、ξR+が0である場合と比較して、右脚の屈曲開始時点が遅くなる。この場合、ξR+の絶対値が大きくなるほど右脚の屈曲開始時点が遅くなる。
【0106】
「ξR-」は、第2位相振動子φ2の右成分φ2Rに対する第2位相振動子の右伸展成分φ2R-の目標位相差である。ξR-の値が負値である場合、ξR-が0である場合と比較して、右脚の伸展開始時点(すなわち屈曲終了時点)が早くなる。この場合、ξR-の絶対値が大きくなるほど右脚の伸展開始時点が早くなる。一方、ξR-の値が正値である場合、ξR-が0である場合と比較して、右脚の伸展開始時点が遅くなる。この場合、ξR-の絶対値が大きくなるほど右脚の伸展開始時点が遅くなる。
【0107】
当該目標位相差ξ=(ξL+,ξL-,ξR+,ξR-)は制御装置20に有線通信又は無線通信が可能な操作装置の操作ボタン(図示略)が操作されることにより、任意に設定されうる。これにより、例えば、各脚の屈曲開始時点(伸展終了時点)及び伸展開始時点(屈曲終了時点)が左右非対称に制御されることにより、片脚麻痺などのために左右の脚体の運動機能が異なるようなユーザの歩行運動が、その運動機能の非対称性に鑑みて適当な形態で補助されうる。
【0108】
目標位相差ξは、位相差δφに基づき、所定の学習係数γ=(γL+,γL-,γR+,γR-)が用いられている関係式(2200)にしたがって逐次設定されてもよい。
【0109】
ξL+(k+1)=ξL+(k)+γL+(δφL(k)-δφL(k-1))/(ξL+(k)-ξL+(k-1)),
ξL-(k+1)=ξL-(k)+γL-(δφL(k)-δφL(k-1))/(ξL-(k)-ξL-(k-1)),
ξR+(k+1)=ξR+(k)+γR+(δφR(k)-δφR(k-1))/(ξR+(k)-ξR+(k-1)),
ξR-(k+1)=ξR-(k)+γR-(δφR(k)-δφR(k-1))/(ξR-(k)-ξR-(k-1)), ..(2200)。
【0110】
目標位相差ξは、位相差δφに代えて第1位相振動子φ1の左右成分の偏差φ1L−φ1Rに基づき、前記関係式にしたがって設定されてもよい。
【0111】
そして、制御信号生成要素24は、第2位相振動子φ2の第2成分φ22、第1制御係数C1=(C1L+,C1L-,C1R+,C1R-)及び第2制御係数C2=(C2L,C2R)に基づき、関係式(241)及び(242)のそれぞれにしたがって、制御信号ηを生成する(図3/STEP04)。
【0112】
ηL=C1L+sinφ2L+−C1L-sinφ2L-+C2L ..(241)。
【0113】
ηR=C1R+sinφ2R+−C1R-sinφ2R-+C2R ..(242)。
【0114】
(歩行補助装置の機能(第3実施形態))
制御装置20による歩行補助装置10の動作制御方法の第3実施形態について説明する。第3実施形態は、制御信号ηの生成方法を除いて第1実施形態と同様であるため、同様の演算処理については説明を省略する。
【0115】
制御信号生成要素24は、関係式(141)及び(142)のそれぞれにおける第1制御係数C1=(C1L,C1R)及び第2制御係数C2=(C2L,C2R)のそれぞれの値を関係式(143)及び(144)のそれぞれにしたがって調節した上で、制御信号ηを生成する(図3/STEP04)。
【0116】
C1L=C1R=(1/2)Carcsin(W0/LLEG) ..(143)。
【0117】
ここで「W0」は目標歩幅である。「LLEG」は脚の長さ(人間の股関節から足裏までの距離)である。「C」はゲイン係数(固定値)である。
【0118】
C2L=(1/2)C(|θLmax|+|θRmin|), C2R=(1/2)C(|θRmax|+|θLmin|) ..(144)。
【0119】
ここで「θLmax」は左股関節角度θLの過去1周期における最大値(上体に対して左脚体が最も屈曲した状態での左股関節角度θL)又は過去複数周期にわたる最大値の平均値である。「θLmin」は左股関節角度θLの過去1周期における最小値(上体に対して左脚体が最も伸展した状態での左股関節角度θL)又は過去複数周期にわたる最小値の平均値である。
【0120】
同様に「θRmax」は右股関節角度θRの現時点から過去1周期における最大値(上体に対して右脚体が最も屈曲した状態での右股関節角度θR)又は過去複数周期にわたる最大値の平均値である。「θRmin」は右股関節角度θRの現時点から過去1周期における最小値(上体に対して右脚体が最も伸展した状態での右股関節角度θR)又は過去複数周期にわたる最小値の平均値である。
【0121】
(歩行補助装置の機能(第4実施形態))
制御装置20による歩行補助装置10の動作制御方法の第4実施形態について説明する。第4実施形態は、制御信号ηの生成方法を除いて第2実施形態と同様であるため、同様の演算処理については説明を省略する。
【0122】
制御信号生成要素24は、関係式(241)及び(242)のそれぞれにおける第1制御係数C1=(C1L+,C1L-,C1R+,C1R-)及び第2制御係数C2=(C2L,C2R)のそれぞれの値を関係式(243)及び(244)のそれぞれにしたがって調節した上で、制御信号ηを生成する(図3/STEP04)。
【0123】
C1L+=C1L-=C1R+=C1R-=(1/2)Carcsin(W0/LLEG) ..(243)。
【0124】
C2L=C|θLmin|+(1/2)C(|θLmax|+|θRmin|),
C2R=C|θRmin|+(1/2)C(|θRmax|+|θLmin|) ..(244)。
【0125】
(歩行補助装置の機能(第5実施形態))
第5実施形態では、第3実施形態及び第4実施形態のそれぞれにおけるゲイン係数Cの値が、制御信号生成要素24によって次のように設定される。
【0126】
まず、評価関数Eが関係式(541)にしたがって算定される。
【0127】
E=(1/2)(W0−ΣjW(j)/N)2 ..(541)。
【0128】
「W(j)」は現時点から過去第jの歩行周期における歩幅である。歩幅W(j)は、例えば左脚体を屈曲運動する歩行周期においては関係式(543)にしたがって算定される一方、右脚体を屈曲運動する歩行周期においては関係式(544)にしたがって算定される。この際、該当歩行周期における股関節角度センサ14の出力に基づく、股関節角度の変化態様を表わす波形信号が用いられる。「ΣjW(j)/N」は連続する過去N周期(Nはたとえば3)にわたる平均歩幅である。
【0129】
W(j)=LLEGsin(|θLmax|+|θRmin|) ..(543)。
【0130】
W(j)=LLEGsin(|θRmax|+|θLmin|) ..(544)。
【0131】
ゲイン係数の今回値C(k)が、前回値C(k-1)及び評価関数Eの今回値E(k)及び前回値E(k-1)に基づき、関係式(545)にしたがって算定される。
【0132】
C(k)−C(k-1)=−τ(E(k)−E(k-1))/Δt ..(545).
「τ」は学習速度係数である。「Δt」は制御装置20の制御周期である。
【0133】
(歩行補助装置の作用効果)
前記機能を発揮する歩行補助装置10によれば、各アクチュエータ16のそれぞれの周期動作の位相の制御基礎となる第2位相振動子φ2の算定(図3/STEP02参照)に際して、人間の上体に対する各大腿の周期運動の位相である第1位相振動子φ1とこの第2位相振動子φ2との偏差と、固有角速度ωとが基礎とされる。第1位相振動子と第2位相振動子との相関係数(左相関係数KL及び右相関係数KR)、第2位相振動子の成分間の相関係数(左右相関係数KLR)及び固有角速度ω以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる(関係式(120)(221)〜(224)参照)。
【0134】
一方、第1位相振動子φ1と第2位相振動子φ2との前回偏差δφ(k-1)が目標偏差δφ0に近づくように、前回の固有角速度ω(k-1)を当該前回偏差δφ(k-1)に応じた量だけ補正することによって今回の固有角速度ω(k)が設定される(図3/STEP03、関係式(131)〜(134))。これにより、補助対象である人間の運動周期に鑑みて適当な周期で各アクチュエータ16を動作させ、かつ、第1装具11に対して各第2装具12を周期的に動かすことができる。
【0135】
例えば、目標偏差δφ0が進角側、すなわち負値に設定されることにより、人間の上体に対する大腿の相対的姿勢の変化に先行して、第1装具11及び第2装具12の相対的姿勢が変化するように歩行補助装置10の動作が制御される。これにより、歩行補助装置10の動作が人間の歩行運動を助長又は促進するようなものとなるので、その歩行速度の上昇が図られる。
【0136】
これとは逆に、目標偏差δφ0が遅角側、すなわち正値に設定されることにより、人間の上体に対する大腿の相対的姿勢の変化に追従して、第1装具11及び第2装具12の相対的姿勢が変化するように歩行補助装置10の動作が制御される。これにより、歩行補助装置10の動作が人間の歩行運動にとって抵抗を与えるようなものとなるので、その歩行速度の低下が図られる。
【0137】
第3及び第4実施形態によれば、人間の脚体の長さLLEGに対する目標歩幅W0の比率に基づき、当該比率W0/LLEGを変数とする増加関数にしたがって、各アクチュエータ16の動作の振幅を定めるような制御信号ηが生成される(関係式(141)〜(143)及び関係式(241)〜(243)参照)。
【0138】
第5実施形態によれば、人間の脚体の長さLLEGと、各股関節角度センサ14から得られる各股関節角度θの時間変化を表わす波形信号とに基づき、人間の過去複数周期にわたる平均歩幅ΣjW(j)/Nと人間の目標歩幅W0との偏差が小さくなるように、各アクチュエータ16のそれぞれの動作の振幅を定めるような制御信号ηが生成される(関係式(543)〜(545)参照)。
【0139】
当該構成の歩行補助装置によれば、人間の目標歩幅W0の大小に応じてアクチュエータ16の周期動作の振幅、すなわち、第1装具11に対する各第2装具12の前後方向の変位量の多少が制御されうる。このため、人間の歩幅Wを目標歩幅W0に近づけるように、当該人間の歩行運動が補助されうる。
【0140】
本発明の第2実施形態としての歩行補助装置が被験者に装着された場合における、第1位相振動子φ1及び第2位相振動子φ2の出力形態が観測された。左右脚の運動機能を意図的に非対称なものとするため、健常者である被験者の右足首に3kgの錘が付けられた。
【0141】
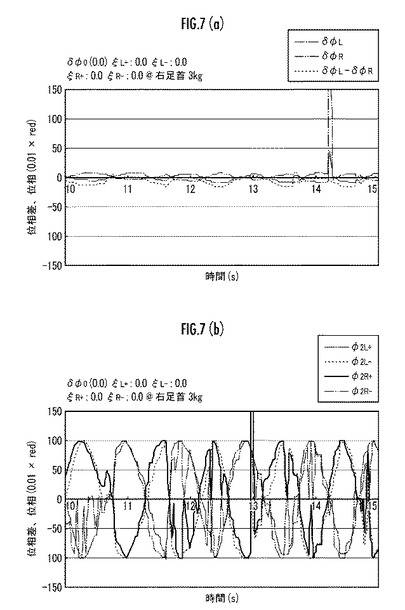
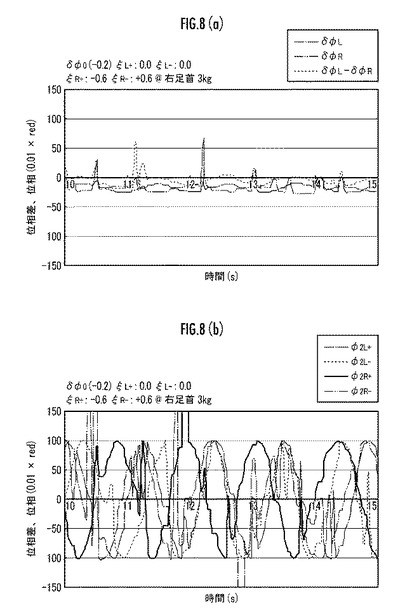
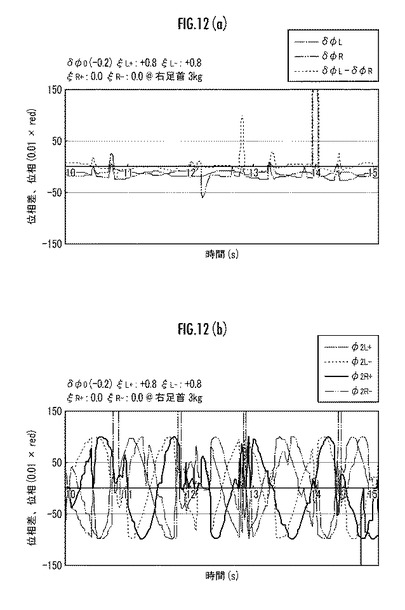
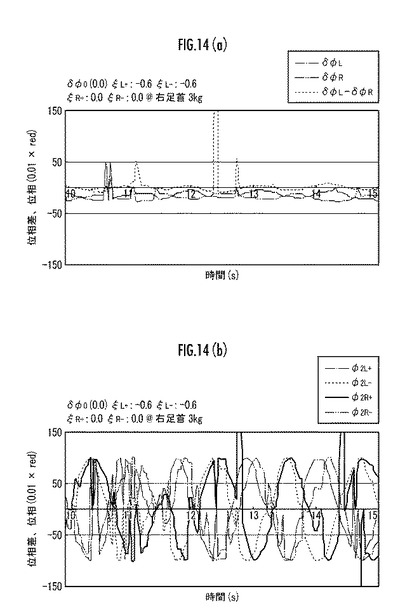
図7〜図14のそれぞれには、目標位相差δφ0=(δφ0L,δφ0R)(関係式(138)参照)及びもう1つの目標位相差ξ=(ξL+,ξL-,ξR+,ξR-)(関係式(221)〜(224)参照)の設定値の相違に応じた、第2位相振動子φ2等の時間変化態様が示されている。
【0142】
各図の(a)には位相差の左成分δφL(一点鎖線)、位相差の右成分δφR(二点鎖線)及びこれらの偏差δφL−δφR(破線)の出力結果が示されている。各図の(b)には第2位相振動子φ2の左屈曲成分φ2L+(一点鎖線)、左伸展成分φ2L-(破線)、右屈曲成分φ2R+(実線)及び右伸展成分φ2R-(二点鎖線)の出力結果が示されている。
【0143】
図7(a)及び図7(b)には、δφ0L=δφ0R=ξL+=ξL-=ξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、δφ0L=δφ0R=0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに同期して追従するようにアクチュエータ16の動作が制御される。
【0144】
図8(a)及び図8(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]、ξR+=−0.6[rad]かつξR-=0.6[rad]である場合の出力結果が示されている。この場合、δφ0L<0かつδφ0R<0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きを先導するようにアクチュエータ16の動作が制御される。また、ξR+<0かつξR->0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点が早くなる一方、右脚の伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0145】
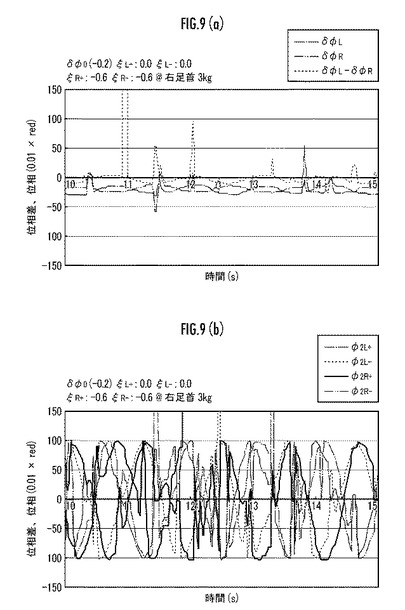
図9(a)及び図9(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]かつξR+=ξR-=−0.6[rad]である場合の出力結果が示されている。この場合、ξR+<0かつξR-<0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点及び伸展開始時点が早くなるように右側アクチュエータ16Rの動作が制御される。
【0146】
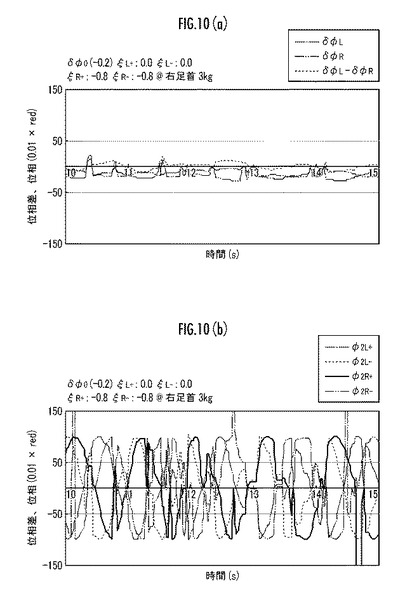
図10(a)及び図10(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]、ξR+=ξR-=−0.8[rad]である場合の出力結果が示されている。図9の場合と比較して、ξR+及びξR-の絶対値が大きい分だけ、被験者の右脚の屈曲開始時点及び伸展開始時点がさらに早くなるように右側アクチュエータ16Rの動作が制御される。
【0147】
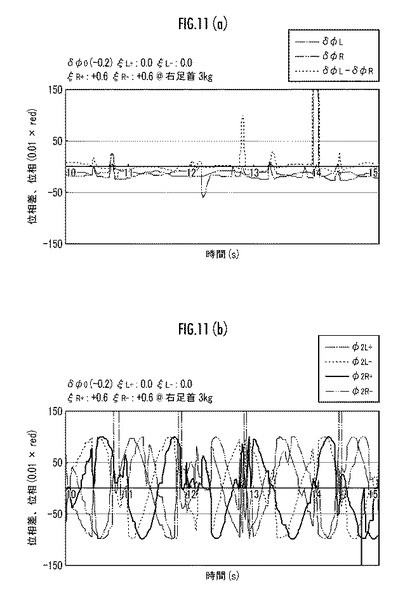
図11(a)及び図11(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]かつξR+=ξR-=0.6[rad]である場合の出力結果が示されている。この場合、ξR+>0かつξR->0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点及び伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0148】
図12(a)及び図12(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0.8[rad]、ξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、ξL+>0かつξL->0なので、図7の場合と比較して、被験者の左脚の屈曲開始時点及び伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0149】
図13(a)及び図13(b)には、δφ0L=δφ0R=0.2[rad]、ξL+=ξL-=−0.6[rad]かつξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、δφ0L>0かつδφ0R>0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに遅れて追従するようにアクチュエータ16の動作が制御される。また、ξL+<0かつξL-<0なので、図7の場合と比較して、被験者の左脚の屈曲開始時点及び伸展開始時点が早くなるように右側アクチュエータ16Rの動作が制御される。
【0150】
図14(a)及び図14(b)には、δφ0L=δφ0R=0[rad]、ξL+=ξL-=−0.6[rad]、ξR+=ξR-=0[rad]である場合の出力結果が示されている。
【0151】
これらの実験結果から、図8及び図10のそれぞれの場合、他の場合と比較して位相差の左成分δφL(一点鎖線)及び位相差の右成分δφR(二点鎖線)が目標位相差δφ0に一致するように安定に制御されていることがわかる。すなわち、足首に錘(3kg)が付けられた右脚の屈曲開始時点及び伸展開始時点が図7の場合と異なるように右側アクチュエータ16Rの動作が制御されることにより、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに対して所望の形態で調和するようにアクチュエータ16の動作が制御されていることがわかる。
【0152】
(本発明の他の実施形態)
ファン・デル・ポル方程式等の方程式により定義され、入力波形信号と引き込み合う、当該方程式の解としての出力波形信号を出力するモデルに対して、第1位相振動子φ1の時間変化態様を表わす波形信号が入力されることにより得られる出力波形信号の各時刻における値が、第2位相振動子φ2の算定(図3/STEP02)及び固有角速度ωの設定(図3/STEP03)のうち少なくとも一方において第1位相振動子φ1の代わりの位相として用いられてもよい。
【符号の説明】
【0153】
10‥歩行補助装置、11‥第1装具、12‥第2装具、16‥アクチュエータ、20‥制御装置、21‥第1位相振動子出力要素、22‥第2位相振動子出力要素、23‥固有角速度設定要素、24‥制御信号生成要素。
【技術分野】
【0001】
本発明は、人間の周期運動を補助する装置に関する。
【背景技術】
【0002】
人間の運動周期と、当該人間に力を伝達するように構成されている装置の動作周期との調和を図りながら、当該人間の周期運動を補助する技術的手法が提案されている(特許文献1参照)。
【0003】
ここで、調節又は設定対象となるパラメータの数の低減のため、位相をCPG(Central Pattern Generator)モデルとして用いることが考えられる(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3930399号公報
【非特許文献】
【0005】
【非特許文献1】飯田、近藤、伊藤「位相振動子と軌道生成モデルによる環境適応機構の提案」SICE Symposium on Decentralized Autonomous Systems 18, 271-276, 2006.01.26
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、モデルを過度に簡素化しすぎると、装置の動作周期が、人間の運動周期との調和という観点から不適当なものとなる可能性が高くなる。
【0007】
そこで、本発明は、調節又は設定対象となる制御用のパラメータの数の低減を図りながら、補助対象である人間の運動周期に鑑みて適当な周期で動作することができる装置を提供することを解決課題とする。
【課題を解決するための手段】
【0008】
本発明は、人間の上体に取り付けられる第1装具と、前記人間の左右の脚体のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている一対の関節角度センサと、少なくとも前記一対の関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の脚体の相対的な周期運動を補助する歩行補助装置に関する。
【0009】
前記課題を解決するための本発明の歩行補助装置は、前記制御装置が、前記一対の関節角度センサのそれぞれの出力に基づき、前記人間の上体に対する各大腿の周期運動の位相を第1位相振動子の左右各成分として測定するように構成されている第1位相振動子出力要素と、前記第1位相振動子の左右各成分に対する偏差と、固有角速度の左右各成分とに応じた速度で変化する左右各成分を有する位相を第2位相振動子として算定するように構成されている第2位相振動子出力要素と、前記第1位相振動子の左右各成分と前記第2位相振動子の左右各成分との前回偏差が目標偏差に近づくように、前回の前記固有角速度の左右各成分を当該前回偏差に応じた量だけ補正することによって今回の前記固有角速度の左右各成分を設定するように構成されている固有角速度設定要素と、前記第2位相振動子の左右各成分に変化にしたがって、前記一対のアクチュエータのそれぞれの周期動作の位相を変化させる制御信号を生成するように構成されている制御信号生成要素とを備えていることを特徴とする。
【0010】
本発明の歩行補助装置によれば、制御用のパラメータの数の低減による制御態様の簡素化を図りながらも、人間の周期運動の位相に鑑みて、歩行補助装置の周期動作の位相が適当に制御されうるように固有角速度の値が設定される。
【0011】
具体的には、各アクチュエータのそれぞれの周期動作の位相の制御基礎となる「第2位相振動子」の算定に際して、人間の上体に対する各大腿の周期運動の位相である「第1位相振動子」とこの第2位相振動子との偏差と、「固有角速度」とが基礎とされる。少なくとも当該偏差の各成分及び固有角速度の各成分が調節又は設定対象となる制御用のパラメータに含まれていれば、その他のパラメータは省略されてもよいという比較的緩やかな条件下で、当該パラメータの数の低減を図ることができる。
【0012】
一方、第1位相振動子と第2位相振動子との前回偏差が目標偏差に近づくように、前回の固有角速度を当該前回偏差に応じた量だけ補正することによって今回の固有角速度が設定される。これにより、補助対象である人間の運動周期に鑑みて適当な周期で各アクチュエータを動作させ、かつ、第1装具に対して各第2装具を周期的に動かすことができる。
【0013】
前記制御信号生成要素が、前記人間の脚体の長さに対する目標歩幅の比率に基づき、当該比率を変数とする増加関数にしたがって、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていてもよい。
【0014】
前記制御信号生成要素が、前記人間の脚体の長さと、前記一対の関節角度センサから得られる各股関節角度の時間変化を表わす波形信号とに基づき、前記人間の過去複数周期にわたる平均歩幅を算出した上で、前記平均歩幅と前記人間の目標歩幅との偏差が小さくなるように、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていてもよい。
【0015】
当該構成の歩行補助装置によれば、人間の目標歩幅の大小に応じてアクチュエータの周期動作の振幅、すなわち、第1装具に対する各第2装具の前後方向の変位量の多少が制御されうる。このため、人間の歩幅を目標歩幅に近づけるように、当該人間の歩行運動が補助されうる。
【0016】
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分、及び、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定するように構成されていてもよい。
【0017】
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定するように構成されていてもよい。
【0018】
当該構成の歩行補助装置によれば、第1位相振動子と第2位相振動子との相関係数、第2位相振動子の成分間の相関係数及び固有角速度以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる。その一方、前記のように固有角速度が設定されることにより、補助対象である人間の運動周期に鑑みて適当な周期で歩行補助装置を動作させることができる。
【0019】
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定し、かつ、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されている第2成分を算定するように構成されていてもよい。
【0020】
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定し、前記第2成分としての前記第2位相振動子の左屈曲及び左伸展各成分と、前記第1位相振動子の左成分との相関項、又は、前記第2成分としての前記第2位相振動子の右屈曲及び右伸展各成分と、前記第1位相振動子の右成分との相関項が含まれている、前記第2成分に該当する各成分の微分方程式を解くことにより、前記第2成分を算定するように構成されていてもよい。
【0021】
当該構成の歩行補助装置によれば、第1位相振動子と第2位相振動子の第1成分との相関係数、第2位相振動子の第1成分間の相関係数、第1位相振動子と第2位相振動子の第2成分との相関係数及び固有角速度以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる。その一方、前記のように固有角速度が設定されることにより、補助対象である人間の運動周期に鑑みて適当な周期で歩行補助装置を動作させることができる。
【0022】
前記第1位相振動子出力要素が、前記一対の関節角度センサのそれぞれの出力に基づき、各股関節角度に対する各股関節角速度の比率の逆正接関数を前記第1位相振動子の左右各成分として測定するように構成されていることが好ましい。
【図面の簡単な説明】
【0023】
【図1】本発明の歩行補助装置の構成説明図。
【図2】歩行補助装置の制御装置の構成説明図。
【図3】歩行補助装置の制御方法に関する説明図。
【図4】関節角度及び関節角速度に関する説明図。
【図5】第1位相振動子に関する説明図。
【図6】第1位相振動子及び第2位相振動子の相関関係並びに第2位相振動子の左成分及び第2位相振動子の右成分の相関関係に関する説明図。
【図7】歩行補助装置の第1の性能実験結果に関する説明図。
【図8】歩行補助装置の第2の性能実験結果に関する説明図。
【図9】歩行補助装置の第3の性能実験結果に関する説明図。
【図10】歩行補助装置の第4の性能実験結果に関する説明図。
【図11】歩行補助装置の第5の性能実験結果に関する説明図。
【図12】歩行補助装置の第6の性能実験結果に関する説明図。
【図13】歩行補助装置の第7の性能実験結果に関する説明図。
【図14】歩行補助装置の第8の性能実験結果に関する説明図。
【発明を実施するための形態】
【0024】
(歩行補助装置の構成)
本発明の歩行補助装置の一実施形態としての歩行補助装置について説明する。以下、脚体等の左右を区別するために符号「L」及び「R」を用いるが、左右をまとめて表現する場合又は左右成分を有するベクトルを表現する場合には当該符号を省略する。また、上体に対する各大腿の屈曲運動(前方運動)及び伸展運動(後方運動)を区別するために符号「+」及び「−」を用いる。
【0025】
図1に示されている歩行補助装置10は、第1装具11と、左右一対の第2装具12と、左右一対のアクチュエータ16と、バッテリ18と、制御装置20と、股関節角度センサ14とを備えている。
【0026】
第1装具11は、人間又は利用者の上体又は腰部(第1身体部分)に巻き付けられるように装着される。第1装具11のうち少なくとも人間の背中に当接する背後部は、軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により構成され、その他の部分は繊維等の柔軟性素材により構成されている。
【0027】
第2装具12は、繊維等の柔軟性素材により構成され、人間の大腿(第2身体部分)に巻き付けられるように装着される。第2装具12は、大腿に加えて又は代えて下腿に巻き付けられるように装着されてもよい。
【0028】
アクチュエータ16は電動モータにより構成され、必要に応じてモータに加え減速機及びコンプライアンス機構のうち一方又は両方により構成される。アクチュエータ16は第1装具11が上体に取り付けられたとき、上体の左右両側に配置されるように第1装具11に連結されている。アクチュエータ16は、軽量の軽量合金、硬質樹脂又はカーボンファイバ等の剛性素材により形成されている連結部材15を介して大腿に装着される第2装具12に連結される。
【0029】
これにより、アクチュエータ16が動作することで、上体及び各大腿の相対運動が補助されるように上体及び各大腿に力が作用する。上体及び各大腿の相対運動には、離床している脚体の大腿の上体に対する前後運動が含まれ、着床している脚体に対する上体の前後運動が含まれる。
【0030】
バッテリ18は制御装置20とともに第1装具11の背後部に取り付けられるケース13に収納されており、アクチュエータ16及び制御装置20等に対して電力を供給する。なお、バッテリ18及び制御装置20のそれぞれ又はこれらを収納するケース13の配置箇所は適宜変更されてもよい。
【0031】
股関節角度センサ14は人間の腰部左右両側に配置されるロータリーエンコーダにより構成され、股関節角度に応じた信号を出力する。股関節角度は、大腿が基本前額面の前方にある場合には正値になり、大腿が基本前額面の後方にある場合には負値になるように定義される。
【0032】
制御装置20はコンピュータ(CPU、ROM、RAM、信号入力回路、信号出力回路等により構成される。)と、このコンピュータのメモリ又は記憶装置に格納されているソフトウェアとにより構成されている。制御装置20は、バッテリ18からアクチュエータ16に対する供給電力を調節するほか、アクチュエータ16の動作を制御する。
【0033】
図2に示されているように、制御装置20は、後述の演算処理を実行する又は機能を発揮する第1位相振動子出力要素21と、第2位相振動子出力要素22と、固有角速度設定要素23と、制御信号生成要素24とを備えている。
【0034】
制御装置20の各構成要素が担当演算処理を実行するように「構成されている」とは、記憶装置に格納されている必要なプログラム及びデータを読み取り、当該プログラムにしたがって当該データに対して演算処理を施すことにより、当該担当演算処理を実行するように「プログラムされている」ことを意味する。各構成要素は、単一の演算処理装置により構成されていてもよく、物理的に分離している複数の演算処理装置により構成されていてもよい。
【0035】
運転スイッチ(図示略)が操作され、バッテリ18から制御装置20に対して電力が供給されることにより、制御装置20は次に説明するような諸機能を発揮しうる。
【0036】
(歩行補助装置の機能(第1実施形態))
制御装置20による歩行補助装置10の動作制御方法の第1実施形態について説明する。
【0037】
まず、第1位相振動子出力要素21が、股関節角度センサ14の出力に基づき、人間の周期運動の位相を第1位相振動子φ1=(φ1L,φ1R)として測定かつ出力する(図3/STEP01)。
【0038】
股関節角度θは、図4に示されているように、大腿が股関節箇所を一端とする線分とみなされた場合、横から見た当該線分と基本前額面とのなす角度として定義される。基本前額面は、上体が前後方向に傾くことに応じて、左右の股関節箇所を通る軸線回りに回動する。股関節角度θは、大腿を表わす線分が基本前額面の前方にある状態では正値である一方、当該線分が基本前額面より後方にある状態では負値であるように定義されている。このため、股関節角速度(dθ/dt)は、大腿が前方に動いている屈曲運動状態では正値になる一方、大腿が後方に動いている伸展運動状態では負値となる。
【0039】
第1位相振動子φ1の左成分φ1Lは、例えば関係式(111)により表され、かつ、図5に模式的に示されているように、左股関節角度θLに対する左股関節角速度(dθL/dt)の比率の逆正接関数として定義される。第1位相振動子φ1の右成分φ1Rは、例えば関係式(112)により表され、かつ、図5に模式的に示されているように、右股関節角度θRに対する右股関節角速度(dθR/dt)の比率の逆正接関数として定義される。
【0040】
φ1L=arctan{(dθL/dt)/θL} ..(111)。
【0041】
φ1R=arctan{(dθR/dt)/θR} ..(112)。
【0042】
第1位相振動子φ1q(q=L,R)は、屈曲運動中に大腿を表わす線分が基本前額面に一致した状態、すなわち、股関節角速度(dθq/dt)が正であり、かつ、股関節角度θqが0である状態で「π/2」になる。第1位相振動子φ1qは、上体に対して脚体又は大腿が最も屈曲した状態、すなわち、股関節角速度(dθq/dt)が0であり、かつ、股関節角度θqが正である状態で「0」になる。
【0043】
第1位相振動子φ1qは、伸展運動中に大腿を表わす線分が基本前額面に一致した状態、すなわち、股関節角速度(dθq/dt)が負であり、かつ、股関節角度θqが0である状態で「−π/2」になる。第1位相振動子φ1qは、上体に対して脚体又は大腿が最も伸展した状態、すなわち、股関節角速度(dθq/dt)が0であり、かつ、股関節角度θqが負である状態で「π」又は「−π」になる。
【0044】
第1位相振動子φ1は、上体に対する各大腿の姿勢及びその変化態様を表わす位相であるともいえる(図5参照)。この意味で、第1位相振動子φ1は、関係式(111)及び(112)に代えて、関係式(113)及び(114)、関係式(115)及び(116)又は関係式(117)及び(118)により定義されてもよい。
【0045】
φ1L=arctan{{H((dθL/dt))−H(-(dθL/dt))}/θL} ..(113)。
【0046】
φ1R=arctan{{H((dθR/dt))−H(-(dθR/dt))}/θR} ..(114)。
【0047】
φ1L=arctan{(dθL/dt)/{H(θL)−H(-θL)}} ..(115)。
【0048】
φ1R=arctan{(dθR/dt)/{H(θR)−H(-θR)}} ..(116)。
【0049】
φ1L=arctan{(dθL/dt)/(dθL/dt)max・θL/θLmax} ..(117)。
【0050】
φ1R=arctan{(dθR/dt)/(dθR/dt)max・θR/θRmax} ..(118)。
【0051】
ここでH(x)はヘヴィサイドの階段関数であり、xが正である場合は1となり、xが0である場合は0又は1/2等の1未満の正数となり、xが負である場合は0となる。(dθL/dt)maxは過去所定周期における左股関節角速度(dθL/dt)の最大値であり、θLmaxは過去所定周期における左股関節角度θLの最大値である。同様に、(dθR/dt)maxは過去所定周期における右股関節角速度(dθR/dt)の最大値であり、θRmaxは過去所定周期における右股関節角度θRの最大値である。
【0052】
また、第2位相振動子出力要素22が、歩行補助装置10の動作周期の位相を第2位相振動子φ2=(φ2L,φ2R)として算定かつ出力する(図3/STEP02)。
【0053】
図6(a)に矢印で示されているように、第2位相振動子φ2は、第1位相振動子φ1に対して位相進み(又は位相遅れ)をもって、第1位相振動子φ1とともに時間変化する。
【0054】
また、図6(b)に矢印で示されているように、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rは、位相差を有しながら時間変化する。第2位相振動子の左成分φ2Lは、左アクチュエータ16Lの動作の位相を定める因子である。第2位相振動子の右成分φ2Rは、右アクチュエータ16Rの動作の位相を定める因子である。
【0055】
例えば、連立微分方程式(120)を解くことにより、第2位相振動子φ2の左右各成分φ2L及びφ2Rが算定される。第1実施形態では、固有角速度ωの設定基礎となる「第1成分」と、制御信号ηの生成基礎となる「第2成分」とは同一である。
【0056】
(dφ2L/dt)=ωL+KLsin(φ1L−φ2L)+KLRsin(φ2R−φ2L),
(dφ2R/dt)=ωR+KRsin(φ1R−φ2R)+KLRsin(φ2L−φ2R) ..(120)。
【0057】
今回第2位相振動子φ2(k)(kは制御サイクルの回数を表わす。)の算出に際して、第1位相振動子出力要素21により測定された今回第1位相振動子φ1(k)と、後述するように固有角速度設定要素23により設定された前回固有角速度ω(k-1)とが連立微分方程式(120)に代入される。k=1の場合、初期の固有角速度ω(0)としては記憶装置に保存されている値が用いられる。
【0058】
「KL」は、第1位相振動子の左成分φ1L及び第2位相振動子の左成分φ2Lの相関関係を表わす左相関係数である。右相関係数KLが「正」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を減少させるように第2位相振動子の右成分φ2Rが決定される。左相関係数KLが「負」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を増加させるように第2位相振動子の左成分φ2Lが決定される。
【0059】
「KR」は、第1位相振動子の右成分φ1R及び第2位相振動子の右成分φ2Rの相関関係を表わす右相関係数である。右相関係数KLが「正」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を減少させるように第2位相振動子の右成分φ2Rが決定される。左相関係数KLが「負」である場合、第1位相振動子の右成分φ1Rと第2位相振動子の右成分φ2Rとの偏差を増加させるように第2位相振動子の左成分φ2Lが決定される。
【0060】
「KLR」は、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rの相関関係を表わす左右相関係数である。左右相関係数KLRは、第2位相振動子の左成分φ2L及び第2位相振動子の右成分φ2Rの偏差を「π」に維持する観点から予め適当な値に設定され、又は、第2位相振動子出力要素22によって設定若しくは適宜補正される。
【0061】
さらに、固有角速度設定要素23が、今回第1位相振動子φ1(k)及び今回第2位相振動子φ2(k)の偏差に応じて定まる今回位相差δφ(k)を目標位相差δφ0に一致させるように、次回固有角速度ω(k+1)を設定する(図3/STEP03)。
【0062】
第1位相振動子φ1及び第2位相振動子φ2に基づき、関係式(131)及び(132)にしたがって位相差δφが算定される。
【0063】
δφL=sin(φ1L−φ2L) ..(131)。
【0064】
δφR=sin(φ1R−φ2R) ..(132)。
【0065】
そして、位相差δφが目標位相差δφ0に近づくように、固有角速度ωが仮想的な2つの振動子が含まれている内部モデルにしたがって算定される。
【0066】
具体的には、まず、左右各成分について、位相差δφが第1位相差δφ1として設定され、指定期間(例えば3歩行周期)にわたり第1位相差δφ1が一定であったことを要件として、左右各成分について、関係式(133)及び(134)によって表される「内部モデル」にしたがって、関係式(135)によって表される内部運動振動子θhと内部誘導振動子θmとの位相差θh−θmが第2位相差δφ2として求められる。
【0067】
dθh/dt=ωh+εsin(θm-θh) ..(133)。
【0068】
dθm/dt=ωm+εsin(θh-θm) ..(134)。
【0069】
δφ2=arcsin[(ωh-ωm)/2ε] ..(135)。
【0070】
ここで、ε=(εL,εR)は仮想モデルにおける仮想運動振動子θh=(θhL,θhR)及び仮想誘導振動子θm=(θmL,θmR)の左右成分ごとの相関係数である。また、ωhは仮想運動振動子θhの角速度であり、ωmは仮想誘導振動子θmの角速度である。
【0071】
続いて、第1位相差δφ1と第2位相差δφ2との差δφ1−δφ2が最小になるように相関係数εの値が設定される。具体的には関係式(136)にしたがって、左右各成分について、第1位相振動子φ1が0となる離散的な時間tid(id:整数)における相関係数εが逐次設定される。
【0072】
ε(tid+1)=ε(tid)-η{v(tid+1)-V(tid)}/{ε(tid)-ε(tid-1)},
V(tid+1)≡(1/2){δφ1(tid+1)-δφ2(tid)}2 ..(136)。
【0073】
ここで、η=(ηL,ηR)の各成分は、第1位相差δφ1の左右各成分と、第2位相差δφ2の左右各成分とを近づけるポテンシャルV=(VL,VR)の安定性を表す係数である。
【0074】
次に、相関係数εの当該設定値に基づき、仮想誘導振動子θmの固有角速度ωmが一定であるという条件下で、左右各成分について、第1及び第2位相差の差δφ1−δφ2の各成分が最小となるように仮想運動振動子θhの角速度ωhが関係式(137)にしたがって設定される。
【0075】
ωh(tid)
=−α∫dt([4ε(tid)2-{ωh(t)-ωm(tid)}2]1/2sin[arcsin{(ωh(t)-ωm(tid-1))/2ε(tid)}-δφ1(tid)]) ..(137)。
【0076】
ここで、α=(αL,αR)の各成分は系の安定性を表す係数である。
【0077】
続いて、左右各成分について、仮想運動振動子θhの角速度ωhに基づき、仮想誘導振動子θmの角速度ωmが新たな固有角速度ωとして設定される。具体的には、左右各成分について、第2位相差δφ2が目標位相差δφ0に近づくように、関係式(138)にしたがって仮想誘導振動子θmの角速度ω=(ωL, ωR)の値が設定される。
【0078】
ω(tid)=β∫dt(4ε(tid)2-{ωh(tid)-ωm(t)}2)sin[arcsin{(ωh(tid)-ωm(t))/2ε(tid)}-δφ0]) ..(138)。
【0079】
ここで、β=(βL, βR)の各成分は系の安定性を表す係数である。
【0080】
当該目標位相差δφ0=(δφ0L,δφ0R)は制御装置20に有線通信又は無線通信が可能な操作装置の操作ボタン(図示略)が操作されることにより、任意に設定されうる。
【0081】
なお、位相差δφ(第1位相差δφ1)が目標位相差δφ0から閾値を超えて乖離した場合、又は固有角速度ωの今回値が閾値を超える程度に前回値から大きく変化した場合、固有角速度ωは、適当なゲイン係数λ=(λL,λR)を用いて、関係式(139)にしたがって算定されてもよい。
【0082】
ωL(k+1)=ωL(k)+λL(δφL(k)−δφ0L), ωR(k+1)=ωR(k)+λR(δφR(k)−δφ0R) ..(139)。
【0083】
また、制御信号生成要素24が、第2位相振動子φ2に基づき、制御信号ηを生成する(図3/STEP04)。
【0084】
例えば、第1制御係数C1及び第2制御係数C2に基づき、関係式(141)及び(142)のそれぞれにしたがって制御信号ηが生成される。
【0085】
ηL=C1Lsinφ2L+C2L ..(141)。
【0086】
ηR=C1Rsinφ2R+C2R ..(142)。
【0087】
なお、第1制御係数C1は、位相差δφ(関係式(131)及び(132)参照)に基づき、所定の学習係数γ1=(γ1L,γ1R)が用いられている関係式(1410)にしたがって逐次設定されてもよい。「k」は制御周期を表わす指数である。
【0088】
C1L(k+1)=C1L(k)+γ1L(δφL(k)-δφL(k-1))/(C1L(k)-C1L(k-1)),
C1R(k+1)=C1R(k)+γ1R(δφR(k)-δφR(k-1))/(C1R(k)-C1R(k-1)) ..(1410)。
【0089】
また、第2制御係数C2は、同じく位相差δφに基づき、所定の学習係数γ2=(γ2L,γ2R)が用いられている関係式(1420)にしたがって逐次設定されてもよい。
【0090】
C2L(k+1)=C2L(k)-γ2L(E(k)-E(k-1))/(C2L(k)-C2L(k-1)),
C2R(k+1)=C2R(k)+γ2R(E(k)-E(k-1))/(C2R(k)-C2R(k-1)) ..(1420)。
【0091】
「E(k)」は、目標歩行比Flref及び測定歩行比(過去所定周期にわたる平均値)Flmeasに基づき、関係式(1422)により定義されるエネルギー関数である。
【0092】
E(k)=(1/2)(Flref-Flmeas)2 ..(1422)。
【0093】
第1制御係数C1及び第2制御係数C2のうち少なくとも一方が、位相差δφに代えて第1位相振動子φ1の左右成分の偏差φ1L−φ1Rに基づき、前記関係式にしたがって設定されてもよい。
【0094】
そして、制御装置20により制御信号ηに基づいてバッテリ18から左右のアクチュエータ16L,16Rにそれぞれ供給される電流I=(IL,IR)が調節される。これにより、第1装具11及び第2装具12を介して上体に対する左右の大腿の屈曲運動及び伸展運動を補助する力又は股関節回りの回転力F=(FL,FR)が調節される。補助力Fは電流Iに基づき、たとえばF(t)=G・I(t)(G:比例係数)と表現される。
【0095】
その後、運転スイッチがONからOFFに切り替えられたこと、又は、動作異常が検知されたこと等の動作終了条件が満たされたか否かが判定される。そして、当該判定結果が否定的である場合、前記一連の処理が繰り返される一方、当該判定結果が肯定的である場合、前記一連の処理が終了する。
【0096】
(歩行補助装置の機能(第2実施形態))
制御装置20による歩行補助装置10の動作制御方法の第2実施形態について説明する。第1位相振動子出力要素21による第1位相振動子φ1の測定方法(図3/STEP01)及び固有角速度設定要素23による固有角速度ωの設定方法(図3/STEP03)については第1実施形態と同様なので説明を省略する。
【0097】
第2位相振動子出力要素22は、固有角速度ωの設定基礎となる「第1成分」と、制御信号ηの生成基礎となる「第2成分」とが異なるような第2位相振動子φ2を生成する(図3/STEP02)。
【0098】
具体的には、連立微分方程式(120)の解として、第2位相振動子φ2の第1成分φ21=(φ2L,φ2R)が求められる。さらに、微分方程式(221)〜(224)のそれぞれの解として、第2位相振動子φ2の第2成分φ22=(φ2L+,φ2L-,φ2R+,φ2R-)が求められる。
【0099】
(dφ2L+/dt)=ωL+KLsin(φ1L−φ2L+−ξL+) ..(221)。
【0100】
(dφ2R+/dt)=ωR+KRsin(φ1R−φ2R+−ξR+) ..(222)。
【0101】
(dφ2L-/dt)=ωL+KLsin(φ1L−φ2L-−ξL-) ..(223)。
【0102】
(dφ2R-/dt)=ωR+KRsin(φ1R−φ2R-−ξR-) ..(224)。
【0103】
「ξL+」は、連立微分方程式(120)の解として求められる第2位相振動子の左成分φ2Lに対する第2位相振動子φ2の左屈曲成分φ2L+の目標位相差である。ξL+の値が負値である場合、ξL+が0である場合と比較して、左脚の屈曲開始時点(すなわち伸展終了時点)が早くなる。この場合、ξL+の絶対値が大きくなるほど左脚の屈曲開始時点が早くなる。一方、ξL+の値が正値である場合、ξL+が0である場合と比較して、左脚の屈曲開始時点が遅くなる。この場合、ξL+の絶対値が大きくなるほど左脚の屈曲開始時点が遅くなる。
【0104】
「ξL-」は、第2位相振動子φ2の左成分φ2Lに対する第2位相振動子の左伸展成分φ2L-の目標位相差である。ξL-の値が負値である場合、ξL-が0である場合と比較して、左脚の伸展開始時点(すなわち屈曲終了時点)が早くなる。この場合、ξL-の絶対値が大きくなるほど左脚の伸展開始時点が早くなる。一方、ξL-の値が正値である場合、ξL-が0である場合と比較して、左脚の伸展開始時点が遅くなる。この場合、ξL-の絶対値が大きくなるほど左脚の伸展開始時点が遅くなる。
【0105】
「ξR+」は、連立微分方程式(120)の解として求められる第2位相振動子の右成分φ2Rに対する第2位相振動子φ2の右屈曲成分φ2R+の目標位相差である。ξR+の値が負値である場合、ξR+が0である場合と比較して、右脚の屈曲開始時点(すなわち伸展終了時点)が早くなる。この場合、ξR+の絶対値が大きくなるほど右脚の屈曲開始時点が早くなる。一方、ξR+の値が正値である場合、ξR+が0である場合と比較して、右脚の屈曲開始時点が遅くなる。この場合、ξR+の絶対値が大きくなるほど右脚の屈曲開始時点が遅くなる。
【0106】
「ξR-」は、第2位相振動子φ2の右成分φ2Rに対する第2位相振動子の右伸展成分φ2R-の目標位相差である。ξR-の値が負値である場合、ξR-が0である場合と比較して、右脚の伸展開始時点(すなわち屈曲終了時点)が早くなる。この場合、ξR-の絶対値が大きくなるほど右脚の伸展開始時点が早くなる。一方、ξR-の値が正値である場合、ξR-が0である場合と比較して、右脚の伸展開始時点が遅くなる。この場合、ξR-の絶対値が大きくなるほど右脚の伸展開始時点が遅くなる。
【0107】
当該目標位相差ξ=(ξL+,ξL-,ξR+,ξR-)は制御装置20に有線通信又は無線通信が可能な操作装置の操作ボタン(図示略)が操作されることにより、任意に設定されうる。これにより、例えば、各脚の屈曲開始時点(伸展終了時点)及び伸展開始時点(屈曲終了時点)が左右非対称に制御されることにより、片脚麻痺などのために左右の脚体の運動機能が異なるようなユーザの歩行運動が、その運動機能の非対称性に鑑みて適当な形態で補助されうる。
【0108】
目標位相差ξは、位相差δφに基づき、所定の学習係数γ=(γL+,γL-,γR+,γR-)が用いられている関係式(2200)にしたがって逐次設定されてもよい。
【0109】
ξL+(k+1)=ξL+(k)+γL+(δφL(k)-δφL(k-1))/(ξL+(k)-ξL+(k-1)),
ξL-(k+1)=ξL-(k)+γL-(δφL(k)-δφL(k-1))/(ξL-(k)-ξL-(k-1)),
ξR+(k+1)=ξR+(k)+γR+(δφR(k)-δφR(k-1))/(ξR+(k)-ξR+(k-1)),
ξR-(k+1)=ξR-(k)+γR-(δφR(k)-δφR(k-1))/(ξR-(k)-ξR-(k-1)), ..(2200)。
【0110】
目標位相差ξは、位相差δφに代えて第1位相振動子φ1の左右成分の偏差φ1L−φ1Rに基づき、前記関係式にしたがって設定されてもよい。
【0111】
そして、制御信号生成要素24は、第2位相振動子φ2の第2成分φ22、第1制御係数C1=(C1L+,C1L-,C1R+,C1R-)及び第2制御係数C2=(C2L,C2R)に基づき、関係式(241)及び(242)のそれぞれにしたがって、制御信号ηを生成する(図3/STEP04)。
【0112】
ηL=C1L+sinφ2L+−C1L-sinφ2L-+C2L ..(241)。
【0113】
ηR=C1R+sinφ2R+−C1R-sinφ2R-+C2R ..(242)。
【0114】
(歩行補助装置の機能(第3実施形態))
制御装置20による歩行補助装置10の動作制御方法の第3実施形態について説明する。第3実施形態は、制御信号ηの生成方法を除いて第1実施形態と同様であるため、同様の演算処理については説明を省略する。
【0115】
制御信号生成要素24は、関係式(141)及び(142)のそれぞれにおける第1制御係数C1=(C1L,C1R)及び第2制御係数C2=(C2L,C2R)のそれぞれの値を関係式(143)及び(144)のそれぞれにしたがって調節した上で、制御信号ηを生成する(図3/STEP04)。
【0116】
C1L=C1R=(1/2)Carcsin(W0/LLEG) ..(143)。
【0117】
ここで「W0」は目標歩幅である。「LLEG」は脚の長さ(人間の股関節から足裏までの距離)である。「C」はゲイン係数(固定値)である。
【0118】
C2L=(1/2)C(|θLmax|+|θRmin|), C2R=(1/2)C(|θRmax|+|θLmin|) ..(144)。
【0119】
ここで「θLmax」は左股関節角度θLの過去1周期における最大値(上体に対して左脚体が最も屈曲した状態での左股関節角度θL)又は過去複数周期にわたる最大値の平均値である。「θLmin」は左股関節角度θLの過去1周期における最小値(上体に対して左脚体が最も伸展した状態での左股関節角度θL)又は過去複数周期にわたる最小値の平均値である。
【0120】
同様に「θRmax」は右股関節角度θRの現時点から過去1周期における最大値(上体に対して右脚体が最も屈曲した状態での右股関節角度θR)又は過去複数周期にわたる最大値の平均値である。「θRmin」は右股関節角度θRの現時点から過去1周期における最小値(上体に対して右脚体が最も伸展した状態での右股関節角度θR)又は過去複数周期にわたる最小値の平均値である。
【0121】
(歩行補助装置の機能(第4実施形態))
制御装置20による歩行補助装置10の動作制御方法の第4実施形態について説明する。第4実施形態は、制御信号ηの生成方法を除いて第2実施形態と同様であるため、同様の演算処理については説明を省略する。
【0122】
制御信号生成要素24は、関係式(241)及び(242)のそれぞれにおける第1制御係数C1=(C1L+,C1L-,C1R+,C1R-)及び第2制御係数C2=(C2L,C2R)のそれぞれの値を関係式(243)及び(244)のそれぞれにしたがって調節した上で、制御信号ηを生成する(図3/STEP04)。
【0123】
C1L+=C1L-=C1R+=C1R-=(1/2)Carcsin(W0/LLEG) ..(243)。
【0124】
C2L=C|θLmin|+(1/2)C(|θLmax|+|θRmin|),
C2R=C|θRmin|+(1/2)C(|θRmax|+|θLmin|) ..(244)。
【0125】
(歩行補助装置の機能(第5実施形態))
第5実施形態では、第3実施形態及び第4実施形態のそれぞれにおけるゲイン係数Cの値が、制御信号生成要素24によって次のように設定される。
【0126】
まず、評価関数Eが関係式(541)にしたがって算定される。
【0127】
E=(1/2)(W0−ΣjW(j)/N)2 ..(541)。
【0128】
「W(j)」は現時点から過去第jの歩行周期における歩幅である。歩幅W(j)は、例えば左脚体を屈曲運動する歩行周期においては関係式(543)にしたがって算定される一方、右脚体を屈曲運動する歩行周期においては関係式(544)にしたがって算定される。この際、該当歩行周期における股関節角度センサ14の出力に基づく、股関節角度の変化態様を表わす波形信号が用いられる。「ΣjW(j)/N」は連続する過去N周期(Nはたとえば3)にわたる平均歩幅である。
【0129】
W(j)=LLEGsin(|θLmax|+|θRmin|) ..(543)。
【0130】
W(j)=LLEGsin(|θRmax|+|θLmin|) ..(544)。
【0131】
ゲイン係数の今回値C(k)が、前回値C(k-1)及び評価関数Eの今回値E(k)及び前回値E(k-1)に基づき、関係式(545)にしたがって算定される。
【0132】
C(k)−C(k-1)=−τ(E(k)−E(k-1))/Δt ..(545).
「τ」は学習速度係数である。「Δt」は制御装置20の制御周期である。
【0133】
(歩行補助装置の作用効果)
前記機能を発揮する歩行補助装置10によれば、各アクチュエータ16のそれぞれの周期動作の位相の制御基礎となる第2位相振動子φ2の算定(図3/STEP02参照)に際して、人間の上体に対する各大腿の周期運動の位相である第1位相振動子φ1とこの第2位相振動子φ2との偏差と、固有角速度ωとが基礎とされる。第1位相振動子と第2位相振動子との相関係数(左相関係数KL及び右相関係数KR)、第2位相振動子の成分間の相関係数(左右相関係数KLR)及び固有角速度ω以外のパラメータが、設定又は調節対象から除外されうるので、当該パラメータの数の低減を図ることができる(関係式(120)(221)〜(224)参照)。
【0134】
一方、第1位相振動子φ1と第2位相振動子φ2との前回偏差δφ(k-1)が目標偏差δφ0に近づくように、前回の固有角速度ω(k-1)を当該前回偏差δφ(k-1)に応じた量だけ補正することによって今回の固有角速度ω(k)が設定される(図3/STEP03、関係式(131)〜(134))。これにより、補助対象である人間の運動周期に鑑みて適当な周期で各アクチュエータ16を動作させ、かつ、第1装具11に対して各第2装具12を周期的に動かすことができる。
【0135】
例えば、目標偏差δφ0が進角側、すなわち負値に設定されることにより、人間の上体に対する大腿の相対的姿勢の変化に先行して、第1装具11及び第2装具12の相対的姿勢が変化するように歩行補助装置10の動作が制御される。これにより、歩行補助装置10の動作が人間の歩行運動を助長又は促進するようなものとなるので、その歩行速度の上昇が図られる。
【0136】
これとは逆に、目標偏差δφ0が遅角側、すなわち正値に設定されることにより、人間の上体に対する大腿の相対的姿勢の変化に追従して、第1装具11及び第2装具12の相対的姿勢が変化するように歩行補助装置10の動作が制御される。これにより、歩行補助装置10の動作が人間の歩行運動にとって抵抗を与えるようなものとなるので、その歩行速度の低下が図られる。
【0137】
第3及び第4実施形態によれば、人間の脚体の長さLLEGに対する目標歩幅W0の比率に基づき、当該比率W0/LLEGを変数とする増加関数にしたがって、各アクチュエータ16の動作の振幅を定めるような制御信号ηが生成される(関係式(141)〜(143)及び関係式(241)〜(243)参照)。
【0138】
第5実施形態によれば、人間の脚体の長さLLEGと、各股関節角度センサ14から得られる各股関節角度θの時間変化を表わす波形信号とに基づき、人間の過去複数周期にわたる平均歩幅ΣjW(j)/Nと人間の目標歩幅W0との偏差が小さくなるように、各アクチュエータ16のそれぞれの動作の振幅を定めるような制御信号ηが生成される(関係式(543)〜(545)参照)。
【0139】
当該構成の歩行補助装置によれば、人間の目標歩幅W0の大小に応じてアクチュエータ16の周期動作の振幅、すなわち、第1装具11に対する各第2装具12の前後方向の変位量の多少が制御されうる。このため、人間の歩幅Wを目標歩幅W0に近づけるように、当該人間の歩行運動が補助されうる。
【0140】
本発明の第2実施形態としての歩行補助装置が被験者に装着された場合における、第1位相振動子φ1及び第2位相振動子φ2の出力形態が観測された。左右脚の運動機能を意図的に非対称なものとするため、健常者である被験者の右足首に3kgの錘が付けられた。
【0141】
図7〜図14のそれぞれには、目標位相差δφ0=(δφ0L,δφ0R)(関係式(138)参照)及びもう1つの目標位相差ξ=(ξL+,ξL-,ξR+,ξR-)(関係式(221)〜(224)参照)の設定値の相違に応じた、第2位相振動子φ2等の時間変化態様が示されている。
【0142】
各図の(a)には位相差の左成分δφL(一点鎖線)、位相差の右成分δφR(二点鎖線)及びこれらの偏差δφL−δφR(破線)の出力結果が示されている。各図の(b)には第2位相振動子φ2の左屈曲成分φ2L+(一点鎖線)、左伸展成分φ2L-(破線)、右屈曲成分φ2R+(実線)及び右伸展成分φ2R-(二点鎖線)の出力結果が示されている。
【0143】
図7(a)及び図7(b)には、δφ0L=δφ0R=ξL+=ξL-=ξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、δφ0L=δφ0R=0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに同期して追従するようにアクチュエータ16の動作が制御される。
【0144】
図8(a)及び図8(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]、ξR+=−0.6[rad]かつξR-=0.6[rad]である場合の出力結果が示されている。この場合、δφ0L<0かつδφ0R<0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きを先導するようにアクチュエータ16の動作が制御される。また、ξR+<0かつξR->0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点が早くなる一方、右脚の伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0145】
図9(a)及び図9(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]かつξR+=ξR-=−0.6[rad]である場合の出力結果が示されている。この場合、ξR+<0かつξR-<0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点及び伸展開始時点が早くなるように右側アクチュエータ16Rの動作が制御される。
【0146】
図10(a)及び図10(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]、ξR+=ξR-=−0.8[rad]である場合の出力結果が示されている。図9の場合と比較して、ξR+及びξR-の絶対値が大きい分だけ、被験者の右脚の屈曲開始時点及び伸展開始時点がさらに早くなるように右側アクチュエータ16Rの動作が制御される。
【0147】
図11(a)及び図11(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0[rad]かつξR+=ξR-=0.6[rad]である場合の出力結果が示されている。この場合、ξR+>0かつξR->0なので、図7の場合と比較して、被験者の右脚の屈曲開始時点及び伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0148】
図12(a)及び図12(b)には、δφ0L=δφ0R=−0.2[rad]、ξL+=ξL-=0.8[rad]、ξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、ξL+>0かつξL->0なので、図7の場合と比較して、被験者の左脚の屈曲開始時点及び伸展開始時点が遅くなるように右側アクチュエータ16Rの動作が制御される。
【0149】
図13(a)及び図13(b)には、δφ0L=δφ0R=0.2[rad]、ξL+=ξL-=−0.6[rad]かつξR+=ξR-=0[rad]である場合の出力結果が示されている。この場合、δφ0L>0かつδφ0R>0なので、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに遅れて追従するようにアクチュエータ16の動作が制御される。また、ξL+<0かつξL-<0なので、図7の場合と比較して、被験者の左脚の屈曲開始時点及び伸展開始時点が早くなるように右側アクチュエータ16Rの動作が制御される。
【0150】
図14(a)及び図14(b)には、δφ0L=δφ0R=0[rad]、ξL+=ξL-=−0.6[rad]、ξR+=ξR-=0[rad]である場合の出力結果が示されている。
【0151】
これらの実験結果から、図8及び図10のそれぞれの場合、他の場合と比較して位相差の左成分δφL(一点鎖線)及び位相差の右成分δφR(二点鎖線)が目標位相差δφ0に一致するように安定に制御されていることがわかる。すなわち、足首に錘(3kg)が付けられた右脚の屈曲開始時点及び伸展開始時点が図7の場合と異なるように右側アクチュエータ16Rの動作が制御されることにより、第1装具11に対する左右の第2装具12の動きが、被験者の胴体に対する左右の大腿の動きに対して所望の形態で調和するようにアクチュエータ16の動作が制御されていることがわかる。
【0152】
(本発明の他の実施形態)
ファン・デル・ポル方程式等の方程式により定義され、入力波形信号と引き込み合う、当該方程式の解としての出力波形信号を出力するモデルに対して、第1位相振動子φ1の時間変化態様を表わす波形信号が入力されることにより得られる出力波形信号の各時刻における値が、第2位相振動子φ2の算定(図3/STEP02)及び固有角速度ωの設定(図3/STEP03)のうち少なくとも一方において第1位相振動子φ1の代わりの位相として用いられてもよい。
【符号の説明】
【0153】
10‥歩行補助装置、11‥第1装具、12‥第2装具、16‥アクチュエータ、20‥制御装置、21‥第1位相振動子出力要素、22‥第2位相振動子出力要素、23‥固有角速度設定要素、24‥制御信号生成要素。
【特許請求の範囲】
【請求項1】
人間の上体に取り付けられる第1装具と、前記人間の左右の脚体のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている一対の関節角度センサと、少なくとも前記一対の関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の脚体の相対的な周期運動を補助する歩行補助装置であって、
前記制御装置が、前記一対の関節角度センサのそれぞれの出力に基づき、前記人間の上体に対する各大腿の周期運動の位相を第1位相振動子の左右各成分として測定するように構成されている第1位相振動子出力要素と、
前記第1位相振動子の左右各成分に対する偏差と、固有角速度の左右各成分とに応じた速度で変化する左右各成分を有する位相を第2位相振動子として算定するように構成されている第2位相振動子出力要素と、
前記第1位相振動子の左右各成分と前記第2位相振動子の左右各成分との前回偏差が目標偏差に近づくように、前回の前記固有角速度の左右各成分を当該前回偏差に応じた量だけ補正することによって今回の前記固有角速度の左右各成分を設定するように構成されている固有角速度設定要素と
前記第2位相振動子の左右各成分に変化にしたがって、前記一対のアクチュエータのそれぞれの周期動作の位相を変化させる制御信号を生成するように構成されている制御信号生成要素とを備えていることを特徴とする歩行補助装置。
【請求項2】
請求項1記載の歩行補助装置において、
前記制御信号生成要素が、前記人間の脚体の長さに対する目標歩幅の比率に基づき、当該比率を変数とする増加関数にしたがって、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていることを特徴とする歩行補助装置。
【請求項3】
請求項1又は2記載の歩行補助装置において、
前記制御信号生成要素が、前記人間の脚体の長さと、前記一対の関節角度センサから得られる各股関節角度の時間変化を表わす波形信号とに基づき、前記人間の過去複数周期にわたる平均歩幅を算出した上で、前記平均歩幅と前記人間の目標歩幅との偏差が小さくなるように、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていることを特徴とする歩行補助装置。
【請求項4】
請求項1〜3のうちいずれか1つに記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分、及び、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項5】
請求項4記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項6】
請求項1〜3のうちいずれか1つに記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定し、かつ、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されている第2成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項7】
請求項6記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定し、
前記第2成分としての前記第2位相振動子の左屈曲及び左伸展各成分と、前記第1位相振動子の左成分との相関項、又は、前記第2成分としての前記第2位相振動子の右屈曲及び右伸展各成分と、前記第1位相振動子の右成分との相関項が含まれている、前記第2成分に該当する各成分の微分方程式を解くことにより、前記第2成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項8】
請求項1〜7のうちいずれか1つに記載の歩行補助装置において、
前記第1位相振動子出力要素が、前記一対の関節角度センサのそれぞれの出力に基づき、各股関節角度に対する各股関節角速度の比率の逆正接関数を前記第1位相振動子の左右各成分として測定するように構成されていることを特徴とする歩行補助装置。
【請求項1】
人間の上体に取り付けられる第1装具と、前記人間の左右の脚体のそれぞれに対して取り付けられる一対の第2装具と、一対のアクチュエータと、前記人間の左右の股関節角度のそれぞれに応じた信号を出力するように構成されている一対の関節角度センサと、少なくとも前記一対の関節角度センサの出力信号に基づいて前記一対のアクチュエータのそれぞれの動作を制御するように構成されている制御装置とを備え、前記一対のアクチュエータのそれぞれの動作によって前記第1装具に対して前記一対の第2装具のそれぞれを動かすことにより、前記上体に対する前記左右の脚体の相対的な周期運動を補助する歩行補助装置であって、
前記制御装置が、前記一対の関節角度センサのそれぞれの出力に基づき、前記人間の上体に対する各大腿の周期運動の位相を第1位相振動子の左右各成分として測定するように構成されている第1位相振動子出力要素と、
前記第1位相振動子の左右各成分に対する偏差と、固有角速度の左右各成分とに応じた速度で変化する左右各成分を有する位相を第2位相振動子として算定するように構成されている第2位相振動子出力要素と、
前記第1位相振動子の左右各成分と前記第2位相振動子の左右各成分との前回偏差が目標偏差に近づくように、前回の前記固有角速度の左右各成分を当該前回偏差に応じた量だけ補正することによって今回の前記固有角速度の左右各成分を設定するように構成されている固有角速度設定要素と
前記第2位相振動子の左右各成分に変化にしたがって、前記一対のアクチュエータのそれぞれの周期動作の位相を変化させる制御信号を生成するように構成されている制御信号生成要素とを備えていることを特徴とする歩行補助装置。
【請求項2】
請求項1記載の歩行補助装置において、
前記制御信号生成要素が、前記人間の脚体の長さに対する目標歩幅の比率に基づき、当該比率を変数とする増加関数にしたがって、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていることを特徴とする歩行補助装置。
【請求項3】
請求項1又は2記載の歩行補助装置において、
前記制御信号生成要素が、前記人間の脚体の長さと、前記一対の関節角度センサから得られる各股関節角度の時間変化を表わす波形信号とに基づき、前記人間の過去複数周期にわたる平均歩幅を算出した上で、前記平均歩幅と前記人間の目標歩幅との偏差が小さくなるように、前記一対のアクチュエータのそれぞれの動作の振幅を定めるような制御信号を生成するように構成されていることを特徴とする歩行補助装置。
【請求項4】
請求項1〜3のうちいずれか1つに記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分、及び、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項5】
請求項4記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項6】
請求項1〜3のうちいずれか1つに記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記固有角速度設定要素による前記固有角速度の設定に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されていない第1成分を算定し、かつ、前記制御信号生成要素による前記制御信号の生成に際して用いられる前記第2位相振動子の左右各成分として、各脚体の屈曲及び伸展の別に応じて区別されている第2成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項7】
請求項6記載の歩行補助装置において、
前記第2位相振動子出力要素が、前記第1成分としての前記第2位相振動子の左右各成分と、前記第1位相振動子の左右各成分との相関項と、前記第1成分としての前記第2位相振動子の左右各成分の相関項とが含まれている連立微分方程式を解くことにより、前記第1成分を算定し、
前記第2成分としての前記第2位相振動子の左屈曲及び左伸展各成分と、前記第1位相振動子の左成分との相関項、又は、前記第2成分としての前記第2位相振動子の右屈曲及び右伸展各成分と、前記第1位相振動子の右成分との相関項が含まれている、前記第2成分に該当する各成分の微分方程式を解くことにより、前記第2成分を算定するように構成されていることを特徴とする歩行補助装置。
【請求項8】
請求項1〜7のうちいずれか1つに記載の歩行補助装置において、
前記第1位相振動子出力要素が、前記一対の関節角度センサのそれぞれの出力に基づき、各股関節角度に対する各股関節角速度の比率の逆正接関数を前記第1位相振動子の左右各成分として測定するように構成されていることを特徴とする歩行補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−111408(P2013−111408A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263045(P2011−263045)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]