
歩行訓練装置
【課題】本発明は、歩行訓練を行なう際の座位または立位の姿勢に応じて安定した補助を行えることを課題とする。
【解決手段】歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。操作部60A,60Bは、上下方向に操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。高さ調整機構50A〜50Dは、操作部60A,60Bが同時に操作されることにより歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
【解決手段】歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。操作部60A,60Bは、上下方向に操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。高さ調整機構50A〜50Dは、操作部60A,60Bが同時に操作されることにより歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は歩行訓練装置に係り、特に歩行訓練者の姿勢に応じた歩行訓練を行えるように構成された歩行訓練装置に関する。
【背景技術】
【0002】
例えば、歩行訓練を行なう歩行訓練装置としては、歩行訓練者が立位の姿勢で掴まりながら押して歩くように構成された装置がある(例えば、特許文献1参照)。
【0003】
また、歩行訓練者の体重が全て下肢に作用しないように歩行訓練者の体を支えながら歩行する装置としては、特許文献2のものがある。この歩行訓練装置は、歩行訓練者に装着された装着具を上方からロープでつり上げると共に、ロープにバネ力を付与して上下動作を支えることで、下肢の負担を軽減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−209490号公報
【特許文献2】特開2007−229430号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1のものは、比較的軽量で歩行訓練者が容易に押して歩くことができるように構成されているが、歩行訓練者が立位の状態で歩行する場合にしか使えず、座位の状態から立位の状態に姿勢を変える場合に歩行訓練者の脚力が弱いと立ち上がることができないことがあり、姿勢に応じた訓練を行なうことが難しかった。
【0006】
また、特許文献2の歩行訓練装置では、歩行訓練者を上方からつり上げるように構成されているので、歩行訓練者の下肢の負担が少ないものの、装置全体が大掛かりになっており、重量もかなりあるので、歩行訓練者が歩行しにくいという問題があった。
【0007】
そこで、本発明は上記事情に鑑み、上記課題を解決した歩行訓練装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構を操作するための操作部と、を備え、
前記調整機構は、前記操作部の操作により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする。
(2)本発明は、前記操作部を前記把持部に設け、
前記把持部を把持している歩行訓練者が前記操作部を操作することにより、前記調整機構が前記把持部の位置を任意の高さ位置に調整することを特徴とする。
(3)本発明の前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする。
(4)本発明の前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする。
(5)本発明は、歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構の動作状態を制御する制御部と、
歩行訓練者に装着された歩行動作補助装置と前記制御部とを通信可能に接続する通信手段と、
を備え、
前記調整機構は、前記歩行動作補助装置からの制御信号により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする。
(6)本発明は、前記複数の支持脚の夫々に前記支持脚に作用する荷重を検出する複数の荷重センサとを有し、
前記通信手段は、前記複数の荷重センサにより検出された検出値を前記歩行動作補助装置の制御装置に送信し、当該歩行訓練者が前記把持部を把持しながら歩行する際の前記複数の荷重センサにより検出された各検出値の左右方向の差に応じて前記歩行動作補助装置が当該歩行訓練者に付与される左脚アシスト力と右脚アシスト力とが各検出値とバランスするように制御させることを特徴とする。
【発明の効果】
【0009】
本発明によれば、歩行訓練者の操作または意思により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることにより、歩行訓練者の姿勢に応じた訓練を容易に行えると共に、歩行訓練者の負担を軽減し、脚力の弱い歩行訓練者でも良い容易に歩行訓練を行なうことができる。
【図面の簡単な説明】
【0010】
【図1】本発明による歩行訓練装置の一実施例を示す側面図である。
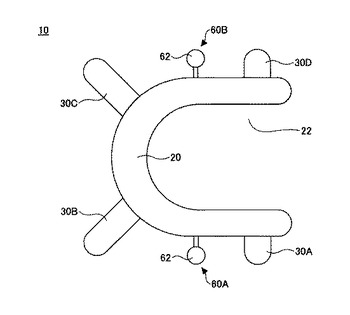
【図2】図1に示す歩行訓練装置の平面図である。
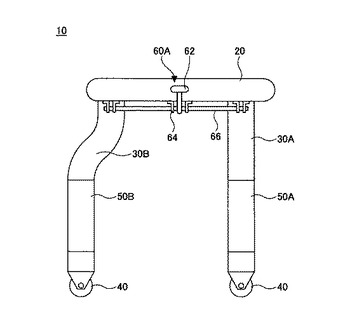
【図3】図1に示す歩行訓練装置の背面図である。
【図4】支持脚の高さ調整機構が縮んだ状態を拡大して示す縦断面図である。
【図5】支持脚の高さ調整機構が伸びた状態を拡大して示す縦断面図である。
【図6】歩行訓練装置を座位状態で使用する場合を示す図である。
【図7】歩行訓練装置を立位状態で使用する場合を示す図である。
【図8】歩行訓練装置の変形例1を示すブロック図である。
【図9】装着式動作補助装置が歩行訓練者に装着された状態を斜め前方からみた斜視図である。
【図10】装着式動作補助装置が歩行訓練者に装着された状態を斜め後方からみた斜視図である。
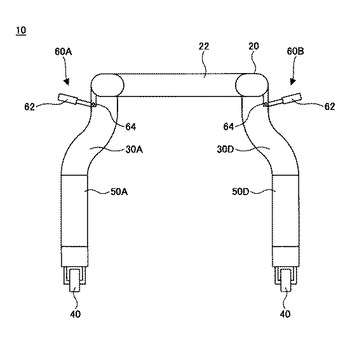
【図11】歩行訓練装置の変形例2を示す斜視図である。
【図12】変形例2の歩行訓練装置を上方からみた平面図である。
【図13】変形例2の歩行訓練装置の制御部及び動作補助装置の制御系を示すブロック図である。
【図14】変形例2の歩行訓練装置を用いて動作補助装置の訓練動作を説明するための斜視図である。
【図15】動作補助装置の角度センサの制御処理を説明するためのフローチャートである。
【図16】歩行訓練装置の荷重センサの制御処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0012】
〔歩行訓練装置の構成〕
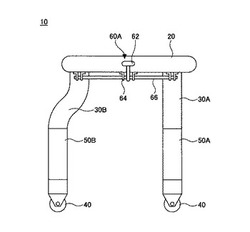
図1は本発明による歩行訓練装置の一実施例を示す側面図である。図2は図1に示す歩行訓練装置の平面図である。図3は図1に示す歩行訓練装置の背面図である。
【0013】
図1乃至図3に示されるように、歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。把持部20は、上方からみるとU字状に形成されており、内側に歩行訓練者の胴部分が入ることができる空間22が形成されている。また、歩行訓練装置10は、歩行訓練者が把持部20を把持することにより、歩行訓練を行なう歩行訓練者の転倒を防止することもできる。
【0014】
支持脚30A〜30Dは、4本設けられており、夫々上端が把持部20に結合され、下端が把持部20より外側に位置するように曲げられている。また、各支持脚30A〜30Dは、内部が中空とされた円筒形状の金属パイプからなり、下端には車輪40が取り付けられている。
【0015】
また、各支持脚30A〜30Dは、支持脚30の長さを任意の長さに調整するように構成された高さ調整機構50A〜50Dを有する。高さ調整機構50A〜50Dは、操作部60A,60Bの操作により把持部20の高さ位置を任意の高さ位置に調整するものであり、操作部60A,60Bを操作されないときは、調整された任意の高さ位置を維持するようにロックされている。
【0016】
操作部60A,60Bは、歩行訓練者が歩行訓練中に誤って操作しないように、把持部20の左右両側の外側に設けられている。また、左側に配された操作部60Aは、左側の高さ調整機構50A,50Bのロック解除を行えるように設けられ、右側に配された操作部60Bは、右側の高さ調整機構50C,50Dのロック解除を行えるように設けられている。
【0017】
また、操作部60A,60Bは、夫々、上下方向に回動操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。そして、高さ調整機構50A〜50Dは、操作レバー62を上方に引き上げられると、ロック解除されるように構成されており、ロック解除状態のときに上下方向の高さ位置を任意の高さ位置に調整可能となる。
【0018】
従って、高さ調整機構50A〜50Dは、歩行訓練者が座位状態から立上がる訓練を行なう際には、操作部60A,60Bが同時に操作されることにより把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
【0019】
歩行訓練装置10は、上記のように大掛かりな構成ではなく、軽量化が図られているため、歩行訓練者が脚力の弱い人の場合でも、容易に歩行訓練を行なうことができるように構成されている。
〔高さ調整機構の構成〕
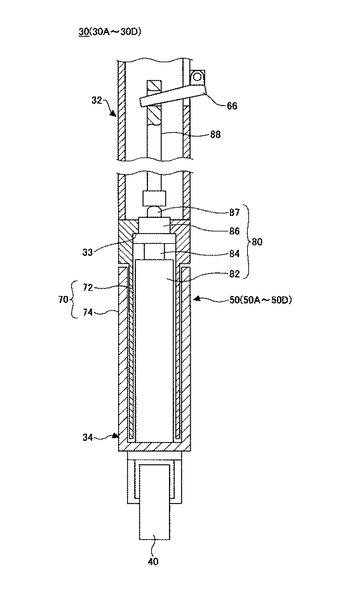
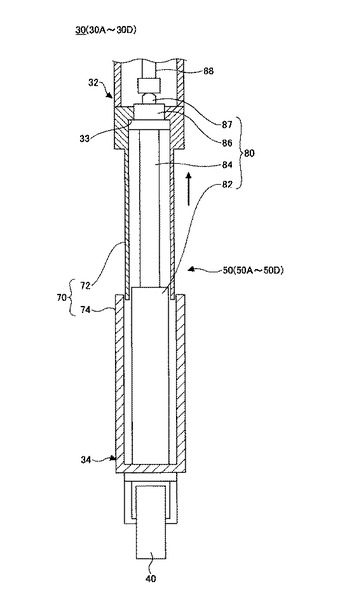
ここで、高さ調整機構50A〜50Dの構成について説明する。図4は支持脚30(30A〜30D)の高さ調整機構50(50A〜50D)が縮んだ状態を拡大して示す縦断面図である。図5は支持脚30(30A〜30D)の高さ調整機構50(50A〜50D)が伸びた状態を拡大して示す縦断面図である。
【0020】
図4に示されるように、高さ調整機構50(50A〜50D)は、支持脚30(30A〜30D)の中空部に収納されており、支持脚30の上部筒状体32と下部筒状体34との間の延在方向の距離(長さ)を調整するように伸縮可能な構成になっている。高さ調整機構50(50A〜50D)は、夫々、上部筒状体32と下部筒状体34との間で伸縮する伸縮部70と、伸縮部70の内側に収納された駆動部80とを有する。伸縮部70は、上部筒状体32の下端に結合された上スリーブ72と、下部筒状体34の下スリーブ74とからなる。上スリーブ72は、外径が下スリーブ74の内径よりも小径であるので、下スリーブ74の内側に収納されるように伸縮動作する。
【0021】
駆動部80は、ガススプリングからなり、高圧ガスが封入されたシリンダ82と、ピストンロッド84とを有する。ピストンロッド84は、下端がシリンダ82内を摺動するピストンに結合され、上端がロック解除部86に結合されている。ロック解除部86は、上部筒状体32の底部に設けられた段部33に嵌合固定されている。尚、駆動部80を構成するガススプリングは、各支持脚30A〜30Dの全長に応じた長さのものを適宜選択することができ、且つ昇降動作による高さ調整範囲もピストンロッド84のストロークを選択することにより適宜設定することができる。また、駆動部80としては、ガススプリングに限らず、例えば、空気圧縮機からの圧縮空気をシリンダに供給するエア駆動方式、あるいはモータの回転力で上部筒状体32を昇降させるモータ駆動方式等を用いても良い。
【0022】
ロック解除部86は、上部筒状体32に挿通された伝達ロッド88を介して操作部60A,60Bの伝達部材66の回動力が伝達されて押圧部87が押下されることにより、シリンダ82内のガスの流通路を開放してロック解除を行なう。これにより、ピストンロッド84は、シリンダ82内のガスの流通路が開放されている間に延在方向(上下方向)に摺動可能になる。尚、歩行訓練者が操作部60A,60Bの操作レバー62に対する押圧操作を解除すると、ロック解除部86に対する押圧力が伝達されなくなるため、シリンダ82内のガスの流通路を閉止するロック状態に復帰する。
【0023】
図5に示されるように、歩行訓練者が操作部60A,60Bの操作レバー62を押下した場合、操作レバー62の回動力が伝達部材66及び伝達ロッド88を介してロック解除部86の押圧部87に伝達され、シリンダ82内のガスの流通路が開放されるため、各高さ調整機構50A〜50Dは高さ調整可能状態に切り替わる。この高さ調整可能状態では、ロック解除状態であるので、ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。その結果、各支持脚30A〜30Dの上部筒状体32と下部筒状体34との間との間隔が拡張されて支持脚30の延在方向の長さが伸長するように動作する。
【0024】
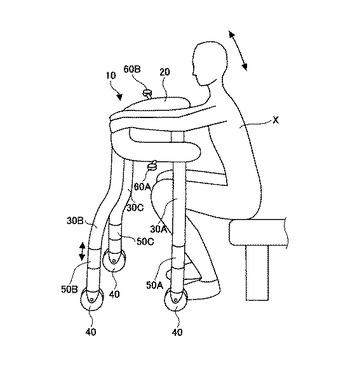
図6は歩行訓練装置10を座位状態で使用する場合を示す図である。図6に示されるように、操作部60A、60Bの操作によりロック解除状態で歩行訓練者Xが体重を把持部20に作用させるか、あるいは把持部20を下方に押圧することでピストンロッド84を押し上げるガス圧よりも下方への押圧力の方が大きいので、各支持脚30A〜30Dの各ピストンロッド84が縮み方向に動作して把持部20が降下する。従って、把持部20に対する垂下方向の押圧力を加減することにより、ピストンロッド84の昇降位置を調整することが可能になる。
【0025】
そして、歩行訓練者Xが座位の状態の場合には、把持部20の高さ位置が座位状態で使用しやすい低い位置に降下したとき、操作部60A,60Bの操作レバー62から手を離して各高さ調整機構50A〜50Dのロック解除操作を停止し、ロック状態に復帰させる。これにより、歩行訓練者Xは、座位状態に対応した高さ位置(低位置)に調整された把持部20を把持することで、比較的容易に座位状態から立位に立ち上がることが可能になる。
【0026】
また、歩行訓練者Xは、立位状態になった後も座位状態に対応した高さ位置(低位置)に調整された把持部20を把持することにより、座位状態に移行する動作過程でもバランスを崩すことなく座ることが可能になる。
【0027】
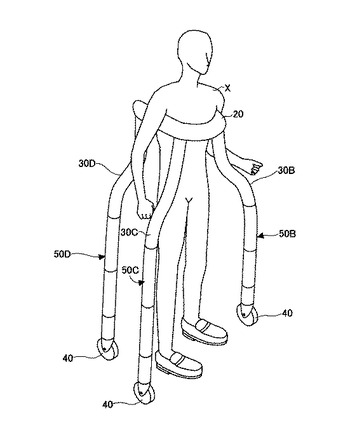
図7は歩行訓練装置10を立位状態で使用する場合を示す図である。図7に示されるように、歩行訓練者Xが立位状態になったとき、再度、操作部60A,60Bの操作レバー62を押下する方向に操作することにより、各高さ調整機構50A〜50Dの各駆動部80のロックが解除される。この場合、把持部20を下方に押圧する力を弱めることにより、各高さ調整機構50A〜50Dの各ピストンロッド84がシリンダ82内のガス圧の作用によって上動し、把持部20が座位の高さ位置から立位の高さ位置に変化する。
【0028】
この立位の状態では、把持部20が歩行訓練者Xの両脇を支える位置に上昇しており、脚力が低下した歩行訓練者Xでも転倒防止されると共に、歩行訓練装置10を強く押さなくても脚を前に出すことで前進することができ、自然に歩行訓練を行なうことが可能になる。
〔変形例1〕
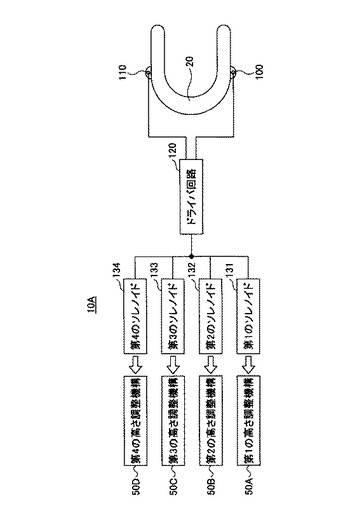
図8は歩行訓練装置の変形例1を示すブロック図である。図8に示されるように、変形例1の歩行訓練装置10Aは、把持部20の左右両側の外側に操作部としての第1、第2のスイッチ100、110が設けられている。この第1、第2のスイッチ100、110は、プッシュ式スイッチからなり、小さな力で押圧すると、ロック解除信号をドライバ回路120に出力する。ドライバ回路120では、アンド回路を有しており、スイッチ100、110が同時にオンになると、各ソレノイド131〜134に通電して各ソレノイド131〜134を励磁状態に切り替える。これにより、スイッチ100、110のいずれか一方が間違ってオンに操作されても各ソレノイド131〜134が誤動作しないようになっている。
【0029】
すなわち、スイッチ100、110が同時にオン操作された場合のみ各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。従って、本変形例では、スイッチ100、110がオンに操作されると、上記操作部60A,60Bの操作レバー62を押下したのと同じロック解除動作が行なわれ、各高さ調整機構50A〜50Dの各ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。また、歩行訓練者Xがスイッチ100、110をオンに操作した状態で把持部20を下方に押圧することで、各高さ調整機構50A〜50Dの長さが調整され、把持部20の高さ位置を任意の高さ位置に調整することが可能になる。
【0030】
また、歩行訓練者Xがスイッチ100、110から手を離してオフ状態に切り替えることにより、ドライバ回路120は、各ソレノイド131〜134への通電を停止して各ソレノイド131〜134を消磁状態に切り替える。この場合、各ソレノイド131〜134による押圧力が無くなると共に、高さ調整機構50A〜50Dの各駆動部80がロック状態に復帰し、把持部20が任意の高さに保持される。
〔変形例2〕
歩行訓練装置の変形例2を説明する前に歩行訓練者が歩行訓練の際に装着する装着式歩行動作補助装置について説明する。
【0031】
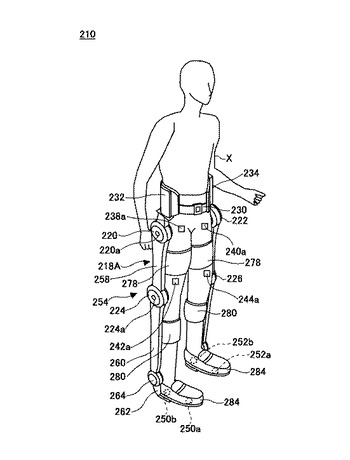
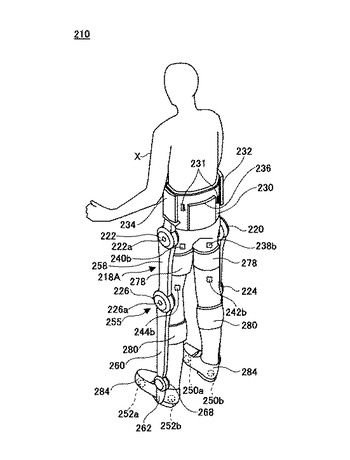
図9は装着式歩行動作補助装置が歩行訓練者に装着された状態を斜め前方からみた斜視図である。図10は装着式歩行動作補助装置が歩行訓練者に装着された状態を斜め後方からみた斜視図である。
【0032】
図9及び図10に示されるように、装着式歩行動作補助装置(以下「歩行動作補助装置」と称する)210は、例えば、骨格筋の筋力低下により歩行が不自由な下肢運動機能障害者、あるいは、歩行運動のリハビリを行う患者などのように自力歩行が困難な人の歩行動作を補助(アシスト)する装置であり、脳からの信号により筋力を発生させる際に生じる生体信号(表面筋電位)を検出し、この検出信号に基づいてアクチュエータからの駆動力を付与するように作動する。
【0033】
歩行動作補助装置210を装着した歩行訓練者Xは、自らの意思で歩行動作を行うと、その際に発生した生体信号に応じた駆動トルクがアシスト力として歩行動作補助装置210から付与され、例えば、通常歩行で必要とされる筋力の半分の力で歩行することが可能になる。従って、歩行訓練者Xは、自身の筋力とアクチュエータ(本実施例では、電動式の駆動モータを用いる)からの駆動トルクとの合力によって全体重を支えながら歩行することができる。
【0034】
その際、歩行動作補助装置210は、歩行動作に伴う重心の移動に応じて付与されるアシスト力(モータトルク)が歩行訓練者Xの意思を反映するように制御している。そのため、歩行動作補助装置210のアクチュエータは、歩行訓練者Xの意思に反するような負荷を与え無いように制御されており、歩行訓練者Xの動作を妨げないように制御される。
【0035】
また、歩行動作補助装置210は、歩行動作以外にも、例えば、歩行訓練者Xが椅子に座った座位状態から立ち上がる際の動作、あるいは立位状態から椅子に腰掛ける際の動作も補助することができる。特に歩行訓練者Xの筋力が弱っている場合には、椅子から立ち上がる動作を行うことが難しいが、歩行動作補助装置210を装着した歩行訓練者Xは、自らの意思に応じて駆動トルクを付与されて筋力の低下を気にせずに動作することが可能になる。
【0036】
ここで、歩行動作補助装置210の構成の一例について説明する。歩行動作補助装置210は、図9及び図10に示されるように、歩行訓練者Xに装着される動作補助装着フレーム218Aに駆動部を設けたものである。駆動部としては、歩行訓練者Xの右側股関節に位置する右腿駆動モータ220と、歩行訓練者Xの左側股関節に位置する左腿駆動モータ222と、歩行訓練者Xの右膝関節に位置する右膝駆動モータ224と、歩行訓練者Xの左膝関節に位置する左膝駆動モータ226とを有する。これらの駆動モータ220,222,224,226は、制御装置からの制御信号により駆動トルクを制御されるDCモータまたはACモータなどからなる電動モータからなり、モータ回転を所定の減速比で減速する減速機構(駆動部に内蔵)を有している。また、歩行動作補助装置210の各関節を駆動する駆動モータ220,222,224,226には、各関節の角度検出値を検出する角度センサ220a,222a,224a,226aが内蔵されている。
【0037】
また、歩行訓練者Xの腰の周囲に装着される腰締結部材230には、駆動モータ220,222,224,226を駆動させるための電源として機能するバッテリ232,234が取り付けられている。バッテリ232、234は、充電式バッテリであり、歩行訓練者Xの歩行動作を妨げないように左右に分散配置されている。
【0038】
また、歩行訓練者Xの背面側となる腰締結部材230の後側には、制御ユニット236が取り付けられている。さらに、腰締結部材230の外周側面(左右両側の前後位置)には、後述する各布製ベルト320A〜320Dの端部を係止する係止部231(231A〜231D)に設けられている(図12参照)。
【0039】
そして、歩行動作補助装置210は、歩行訓練者Xの右腿の動きに伴う生体電位を検出する生体信号検出センサ238a,238bと、歩行訓練者Xの左腿の動きに伴う生体電位を検出する生体信号検出センサ240a,240bと、右膝の動きに伴う生体電位を検出する生体信号検出センサ242a,242bと、左膝の動きに伴う生体電位を検出する生体信号検出センサ244a,244bとを有する。
【0040】
これらの各生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、筋電位信号や神経伝達信号などの生体電位信号を皮膚を介して検出する生体信号検出手段であり、微弱電位を検出するための電極(図示せず)を有する。尚、本実施例では、各生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、電極の周囲を覆う粘着シールにより歩行訓練者Xの皮膚表面に貼着するように取り付けられる。
【0041】
人体においては、脳からの指令によって骨格筋を形成する筋肉の表面にシナプス伝達物質のアセチルコリンが放出される結果、筋線維膜のイオン透過性が変化して活動電位が発生する。そして、活動電位によって筋線維の収縮が発生し、筋力を発生させる。そのため、骨格筋の電位を検出することにより、歩行動作の際に生じる筋力を推測することが可能になり、この推測された筋力に基づく仮想トルクから歩行動作に必要なアシスト力を求めることが可能になる。
【0042】
従って、歩行動作補助装置210では、これらの生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bによって検出された生体信号に基づいて4個の駆動モータ220,222,224,226に供給する駆動電流を求め、この駆動電流で駆動モータ220,222,224,226を駆動することで、アシスト力が付与されて歩行訓練者Xの歩行動作を補助するように構成されている。
【0043】
また、歩行動作による重心移動をスムーズに行うため、脚の裏にかかる荷重を検出する必要がある。そのため、歩行訓練者Xの左右脚の裏には、床反力センサ250a,250b,252a,252b(図9及び図10中、破線で示す)が設けられている。
【0044】
また、床反力センサ250aは、右脚前側の荷重に対する反力を検出し、床反力センサ250bは、右脚後側の荷重に対する反力を検出する。床反力センサ252aは、左脚前側の荷重に対する反力を検出し、床反力センサ252bは、左脚後側の荷重に対する反力を検出する。各床反力センサ250a,250b,252a,252bは、例えば、印加された荷重に応じた電圧を出力する圧電素子などからなり、体重移動に伴う荷重変化、及び歩行訓練者Xの脚と地面との接地の有無を夫々検出することができる。
【0045】
動作補助装着フレーム218Aは、歩行訓練者Xの腰に装着される腰締結部材230と、第1締結部材の右側部から下方に設けられた右脚補助部254と、腰締結部材230の左側部から下方に設けられた左脚補助部255とを有する。
【0046】
右脚補助部254と左脚補助部255とは、左右対称に配置されており、腰締結部材230に固定されたブラケット256と、ブラケット256より下方に延在し歩行訓練者Xの腿外側に沿うように形成された第1フレーム258と、第1フレーム258より下方に延在し歩行訓練者Xの脛外側に沿うように形成された第2フレーム260と、歩行訓練者Xの脚の裏(靴を履く場合には、靴底)が載置される第3フレーム262とを有する。
【0047】
さらに、駆動モータ220,222,224,226は、関節角度を検出する角度センサ220a,222a,224a,226aを有する。この角度センサ220a,222a,224a,226aは、例えば、腰関節及び膝関節の関節角度に比例したパルス数をカウントするロータリエンコーダなどからなり、関節角度に応じたパルス数に対応した電気信号をセンサ出力として出力する。
【0048】
また、第1フレーム258の長手方向の中間位置には、歩行訓練者Xの腿に締結されるベルト状の腿締結部材278が取り付けられている。また、第2フレーム260の長手方向の中間位置には、歩行訓練者Xの膝下の脛に締結されるベルト状の脛締結部材280が取り付けられている。
【0049】
従って、駆動モータ220,222,224,226で発生された駆動トルクは、ギヤを介して第1フレーム258、第2フレーム260に伝達され、さらに腿締結部材278、脛締結部材280を介して歩行訓練者Xの脚にアシスト力(補助力)として伝達される。
【0050】
また、第2フレーム260の下端には、足首関節268を介して靴284が回動可能に連結されている。
【0051】
各フレーム258,260,262は、夫々ジュラルミン等の軽量化された金属材の周囲を弾性を有する樹脂材で覆うように構成されており、腰締結部材230に取り付けられたバッテリ232,234、制御ユニット236等の動作補助装着フレーム218Aの重量を支えることができる。すなわち、歩行動作補助装置210は、動作補助装着フレーム218Aなどの重量が歩行訓練者Xに作用しないように構成されており、歩行訓練者Xに余計な荷重を与えないように取り付けられる。
【0052】
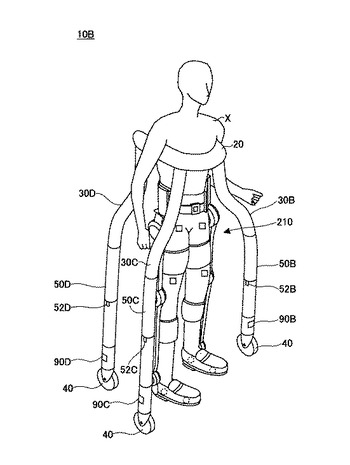
図11は本発明による歩行訓練装置の変形例2を示す斜視図である。図11に示されるように、歩行訓練者Xは、歩行動作補助装置210を最初に装着して歩行訓練を行なう際、歩行訓練装置10Bを用いて歩行訓練を行なう。歩行動作補助装置210は、歩行訓練者Xの生体電位信号に基づき各関節の駆動モータ220,222,224,226を制御して歩行のための駆動トルクを歩行訓練者Xの脚に伝達する。しかしながら、歩行訓練者Xは、歩行動作補助装置210を装着した状態での歩行訓練を初め行なう場合、歩行動作補助装置210によるアシスト力がどのように作用するのかを体感しておらず、精神的に不安を感じることがある。そのような場合には、歩行動作補助装置210を装着した歩行訓練者Xは、歩行訓練装置10Bによる歩行支援を受けながら歩行訓練を行なうと安心する。
【0053】
歩行訓練装置10Bは、歩行動作補助装置210の動作制御に連動して把持部20の高さ位置を自動的に調整する機能を有する。すなわち、歩行動作補助装置210を装着した歩行訓練者Xが座位状態になると、歩行動作補助装置210の制御ユニット236から歩行訓練者Xの動き(姿勢)に応じた制御信号が出力されると、当該制御信号に基づいて歩行訓練装置10Bは、各高さ調整機構50A〜50Dの駆動部80をロック解除状態に切り替えて把持部20の高さを歩行訓練者Xの動き、身長、姿勢に応じた高さ位置に調整可能となる。
【0054】
また、各高さ調整機構50A〜50Dには、駆動部80のピストンロッド84が伸び状態か縮み状態かを検出する長さ位置検出センサ52A〜52Dが設けられている。
【0055】
また、各支持脚30A〜30Dの下端には、荷重センサ90A〜90Dが取り付けられている。荷重センサ90A〜90Dは、歪みゲージあるいは圧電素子からなり、各支持脚30A〜30Dの夫々に付加された荷重の大きさに応じた検出信号を出力する。
【0056】
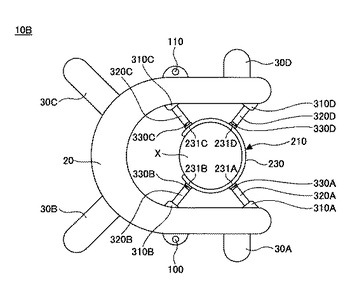
図12は変形例2の歩行訓練装置を上方からみた平面図である。図12に示されるように、歩行訓練装置10Bは、U字状に形成された把持部20の内側の4箇所にベルト繰り出し部310A〜310Dを有する。ベルト繰り出し部310A〜310Dは、歩行訓練者Xに向かう方向(中心に向かう方向)に布製ベルト320A〜320Dを繰り出すと共に、所定以上の張力が作用したときは布製ベルト320A〜320Dを強制的に巻き取るプリテンショナーを有する。
【0057】
歩行訓練を行なう際には、各布製ベルト320A〜320Dの端部に設けられたフック330A〜330Dを歩行動作補助装置210の腰締結部材230の外周側面に設けられた各係止部231A〜231Dに係止させる。各布製ベルト320A〜320Dは、歩行訓練者Xが通常の動きをしているときは、弛んだ状態であるので、歩行動作を妨げることがない。しかしながら、例えば、歩行訓練Xがバランスを崩して体が左右方向に傾いたり、あるいは歩行動作時に靴が滑って急速に前後方向の重心移動が生じたとき、布製ベルト320A〜320Dのいずれかの張力が増大する。これにより、布製ベルト320A〜320Dは、ベルト繰り出し部310A〜310Dのプリテンショナーによって瞬時に巻き取られ把持部20との間で張力を増大させたベルト拘束状態に切り替わる。
【0058】
これにより、歩行訓練者Xは、各布製ベルト320A〜320Dの張力を介して把持部20に支えられ、転倒することを防止される。
【0059】
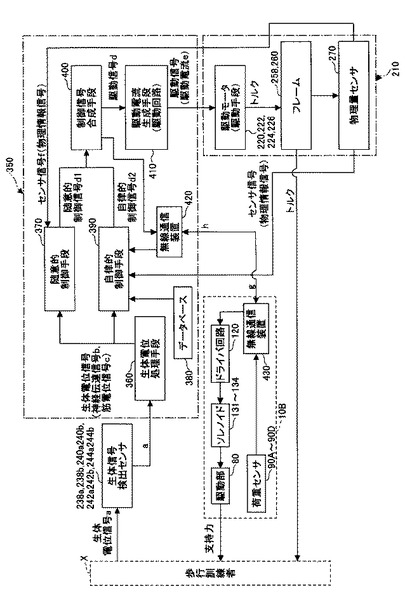
図13は変形例2の歩行訓練装置の制御部及び動作補助装置の制御系を示すブロック図である。図13に示されるように、歩行動作補助装置210の制御ユニット236に搭載された制御装置350は、生体電位処理手段360、随意的制御手段370、データベース380、自律的制御手段390、制御信号合成手段400、駆動電流生成手段410を有する。
【0060】
生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、歩行訓練者Xの歩行動作によって発生する生体電位信号aを検出して生体電位処理手段360に入力する。生体電位処理手段360は、生体電位信号aから神経伝達信号bおよび筋電位信号cを抽出して随意的制御手段370に入力する。
【0061】
随意的制御手段370は、歩行動作補助装置210が装着された歩行訓練者Xの意思による歩行動作の際に生じる生体電位信号aから得られた神経伝達信号bおよび筋電位信号cに基づいて随意的制御信号d1を生成する。
【0062】
また、自律的制御手段390は、神経伝達信号bおよび筋電位信号cに基づいて自律制御信号d2を生成する。また、随意的制御手段370および自律的制御手段390は、各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270により検出された物理量とデータベース380に格納された基準パラメータとを比較することにより、歩行訓練者Xが行おうとしているタスクのフェーズを推定し、このフェーズに応じたハイブリッド比およびパワーアシスト率となるように、随意的制御信号d1および自律的制御信号d2を生成し、制御信号合成手段400に供給する。
【0063】
制御信号合成手段400では、随意的制御手段370からの随意制御信号d1と、自律的制御手段390からの自律制御信号d2とを合成して駆動信号dを生成する。
【0064】
駆動電流生成手段410は、制御信号合成手段400からの制御信号dに基づいてモータ駆動電流eを生成して各駆動モータ220,222,224,226に出力する。駆動モータ220,222,224,226の駆動力により歩行動作補助装置210のフレーム258、260が駆動され、フレーム258、260を介してモータトルクが歩行訓練者Xの脚に伝達される。
【0065】
また、歩行動作に伴って各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270で検出されたセンサ信号fが随意的制御手段370及び自律制御手段390にフィードバックされる。そして、随意的制御手段370及び自律制御手段390では、神経伝達信号bと筋電位信号cとセンサ信号fとの組合せに基づいて随意的制御信号d1、自律制御信号d2を生成する。
【0066】
そして、制御信号合成手段400は、随意的制御手段370及び自律制御手段390からの随意的制御信号d1、自律制御信号d2に基づいて歩行動作補助装置210の駆動モータ220,222,224,226(図9、図10を参照)の駆動を制御する制御信号と、各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270により検出された歩行訓練者Xの動作、姿勢に関する物理量からデータベース380からタスクのフェーズを推定し、推定したフェーズに対応するパワーアシスト率となるように駆動力を駆動モータ220,222,224,226に発生させる制御信号とを生成する。
【0067】
制御信号合成手段400で生成された制御信号は、無線通信装置420を介して無線信号gに変換される。さらに、無線信号gは、歩行訓練装置10Bに搭載された無線通信装置430に受信され、ドライバ回路120に入力される。ドライバ回路120は、前述した変形例1の場合と同様に、各ソレノイド131〜134(図8参照)に通電して各ソレノイド131〜134を励磁状態に切り替える。各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。
【0068】
これにより、各高さ調整機構50A〜50Dの駆動部80のロック解除動作が行なわれ、各ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。また、歩行訓練者Xがこのロック解除状態で把持部20を下方に押圧する押圧力を加減することで、各高さ調整機構50A〜50Dの長さが調整され、把持部20の高さ位置を任意の高さ位置に調整することが可能になる。尚、歩行訓練者Xは、把持部20に設けられたスイッチ100、110をオンに切り替えると、手動操作により各高さ調整機構50A〜50Dの駆動部80をロック解除して把持部20の高さ位置を調整することができる。
【0069】
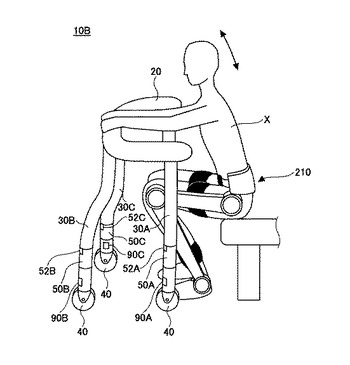
図14は変形例2の歩行訓練装置10Bを用いて歩行動作補助装置210の訓練動作を説明するための斜視図である。図14に示されるように、歩行訓練者が座位状態になったときは、膝関節の回動角度が90度未満になったことを駆動モータ224,226に内蔵された角度センサ224a、226aにより検出され、当該角度検出信号が無線通信装置420、430を介してドライバ回路120に入力される。これにより、ドライバ回路120は、前述した変形例1の場合と同様に、各ソレノイド131〜134(図8参照)に通電して各ソレノイド131〜134を励磁状態に切り替える。各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。
【0070】
このように、各高さ調整機構50A〜50Dの駆動部80のロック解除動作が行なわれた状態で、歩行訓練者Xが把持部20を下方に押圧することで、各ピストンロッド84が縮み方向に摺動し、把持部20は座位状態に適した高さに降下する。
【0071】
座位状態から立ち上がる際は、歩行訓練装置10Bの把持部20が座位状態に応じた低い位置に降下しているので、歩行訓練者Xは、把持部20に掴まりやすく、容易に立ち上がることができ、立上がり動作過程でバランスを崩すことが防止される。
【0072】
また、歩行訓練者Xは、立位の状態でも把持部20を把持することにより、立位状態から座位に移行する動作過程でもバランスを崩すことなく座ることが可能になる。
【0073】
また、各支持脚30A〜30Dの下端に設けられた荷重センサ90A〜90Dの検出信号は、無線通信装置430を介して無線信号hに変換される。無線信号hは、歩行動作補助装置210に搭載された無線通信装置420に受信され、自律制御手段390に入力される。そのため、自律制御手段390は、荷重センサ90A〜90Dの検出信号によって歩行訓練者Xがどの程度歩行訓練装置10Bに体重を掛けているかを判別し、歩行訓練者Xが歩行訓練装置10Bに依存する割合を演算する。この演算結果により、自律制御手段390は、自律制御信号d2を補正する。
【0074】
例えば、歩行訓練者Xが歩行訓練装置10Bに依存する割合が50%の場合には、自律制御信号d2を30%減少させる。また、歩行訓練者Xが歩行訓練装置10Bに依存する割合が20%の場合には、自律制御信号d2を10%減少させる。これにより、歩行動作補助装置210の駆動モータ220,222,224,226によるアシスト力(モータトルク)が過剰にならないように抑制することができる。
【0075】
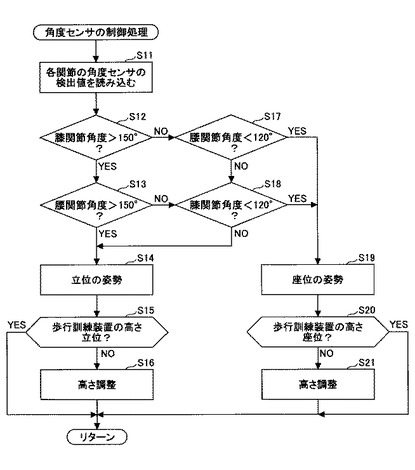
ここで、制御装置350が実行する角度センサの制御処理について説明する。図15は動作補助装置の角度センサの制御処理を説明するためのフローチャートである。
【0076】
図15に示されるように、制御装置350は、S11で、歩行動作補助装置210の各関節を駆動する駆動モータ220,222,224,226に内蔵された角度センサ220a,222a,224a,226aにより検出された各関節の角度検出値を読み込む。続いて、S12に進み、角度センサ224a,226aにより検出された膝関節角度が予め設定された所定の立位判定角度(例えば、150度)以上か否かをチェックする。尚、膝関節角度の立位判定角度は、任意の所定角度に設定可能であり、150度に限らない。
【0077】
S12において、角度センサ224a,226aにより検出された膝関節角度が所定角度(例えば、150度)以上の場合(YESの場合)には、S13に進み、角度センサ220a,222aにより検出された腰関節角度が予め設定された所定の立位判定角度(例えば、150度)以上か否かをチェックする。尚、腰関節角度の立位判定角度は、任意の所定角度に設定可能であり、150度に限らない。
【0078】
S13において、角度センサ220a,222aにより検出された腰関節角度が所定角度(例えば、150度)以上の場合(YESの場合)には、S14に進み、当該歩行訓練者Xが立位の姿勢であると判定する。次のS15では、各支持脚30A〜30Dの各高さ調整機構50A〜50Dに設けられた長さ位置検出センサ52A〜52Dの長さ検出値を読み込み、歩行訓練装置10Bの把持部20の高さ位置(最大長さ)が立位状態であるか否かをチェックする。
【0079】
S15において、歩行訓練装置10Bの把持部20の高さ位置(最大長さ)が立位状態であるときは、歩行訓練者Xの姿勢(立位)と一致するので、S16の処理を行なわず、S15において、歩行訓練装置10Bの把持部20の高さ位置が座位状態であるときは、歩行訓練者Xの姿勢(立位)と一致しないので、S16に進み、歩行訓練装置10Bの高さ調整を行なうように歩行訓練装置10Bに支持する。これにより、歩行訓練装置10Bでは、ドライバ回路120が、各ソレノイド131〜134(図8参照)に通電して各高さ調整機構50A〜50Dの駆動部80のロック解除動作を行なう。これにより、各駆動部80の各ピストンロッド84がシリンダ82内のガス圧の作用によって上動して把持部20の高さ位置を立位の高さ位置(図11参照)に調整することが可能になる。
【0080】
また、上記S12において、検出された膝関節角度が所定角度(例えば、150度)未満の場合(NOの場合)には、S17に進み、角度センサ220a,222aにより検出された腰関節角度が所定の座位判定角度(例えば、120度)以下か否かをチェックする。尚、腰関節角度の座位判定角度は、任意の座位所定角度に設定可能であり、120度に限らない。
【0081】
S17において、腰関節角度が所定の座位判定角度(例えば、120度)以下のときは、歩行訓練者Xが座っている可能性が高いので、S19に進み、当該歩行訓練者Xが座位の姿勢であると判定する。また、S13において、腰関節角度が所定の立位判定角度(例えば、150度)未満の場合(NOの場合)には、S18に進み、角度センサ224a、226aにより検出された膝関節角度が所定の座位判定角度(例えば、120度)以下か否かをチェックする。尚、膝関節角度の座位判定角度は、任意の座位所定角度に設定可能であり、120度に限らない。
【0082】
S18において、膝関節角度が所定の座位判定角度(例えば、120度)以下のときは、歩行訓練者Xが座っている可能性が高いので、S19に進み、当該歩行訓練者Xが座位の姿勢であると判定する。
【0083】
次のS20では、各支持脚30A〜30Dの各高さ調整機構50A〜50Dに設けられた長さ位置検出センサ52A〜52Dの長さ検出値を読み込み、歩行訓練装置10Bの把持部20の高さ位置が座位状態(低位置)であるか否かをチェックする。
【0084】
S20において、歩行訓練装置10Bの把持部20の高さ位置が座位状態(低位置)であるときは、歩行訓練者Xの姿勢(座位)と一致するので、S21の処理を行なわず、S20において、歩行訓練装置10Bの把持部20の高さ位置が立位状態であるときは、歩行訓練者Xの姿勢(座位)と一致しないので、S21に進み、歩行訓練装置10Bの高さ調整を行なうように歩行訓練装置10Bに指示する。これにより、歩行訓練装置10Bでは、ドライバ回路120が、各ソレノイド131〜134(図8参照)に通電して各高さ調整機構50A〜50Dの駆動部80のロック解除動作を行なう。これにより、歩行訓練者Xが把持部20を下方に押圧することで、各ピストンロッド84が縮み方向に摺動し、把持部20は座位状態(図14参照)に適した高さに降下する。
【0085】
従って、歩行訓練者Xは、座位状態から立ち上がる際は、歩行訓練装置10Bの把持部20が座位状態に応じた低い位置に降下しているので、把持部20に掴まりやすく、立ち上がり動作過程でバランスを崩すことが防止される。
【0086】
また、上記S17において、腰関節角度が所定角度(例えば、120度)以下でないときは、立位状態である可能性が高いので、S18に進み、膝関節角度が所定角度(例えば、120度)以下か否かをチェックする。また、S18において、膝関節角度が120度以下でないときは、歩行訓練者Xが立位状態である可能性が高いので、S14に進み、当該歩行訓練者Xが立位状態であると判定する。この後は、前述した場合と同様に、歩行訓練者Xが立位状態に応じた高さ調整を行なう。
【0087】
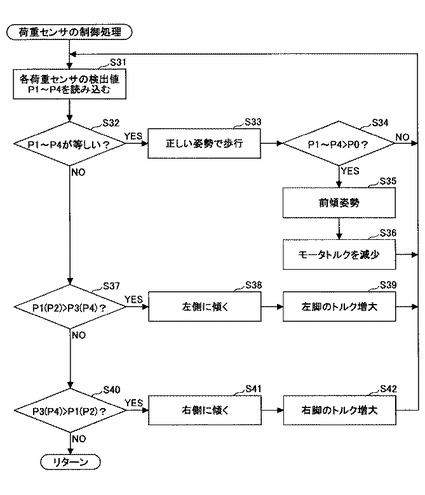
ここで、歩行訓練装置10Bの荷重センサの制御処理について説明する。図16は歩行訓練装置10Bの荷重センサ90A〜90Dの制御処理を説明するためのフローチャートである。尚、歩行訓練者Xが歩行動作補助装置210を装着した状態で歩行訓練装置10Bによる歩行訓練を行う場合、歩行訓練者Xは、右脚と左脚とを交互に前に出して歩行する。その際、歩行訓練者Xの左右脚のうち地面に接地している方が支持脚期となり、地面から離れて前へ移動する脚が遊脚期となる。すなわち、歩行訓練者Xは、支持脚期となる右脚(又は左脚)が体重を支え、遊脚期となる左脚(又は右脚)がバランスを取りながら前へ移動する。
【0088】
図16に示されるように、制御装置350は、S31で無線通信装置420、430(通信手段)を介して各支持脚30A〜30Dに設けられた荷重センサ90A〜90Dの検出値P1〜P4を読み込む。次のS32において、荷重センサ90A〜90Dの検出値P1〜P4がほぼ等しいか否かをチェックする。S32において、荷重センサ90A〜90Dの検出値P1〜P4がほぼ等しいときは、各支持脚30A〜30Dに均等に荷重が作用しているので、歩行訓練者Xが正しい姿勢(直立状態に近い歩行姿勢)で歩行しているものと判断する。
【0089】
続いて、S34では、荷重センサ90A〜90Dの検出値P1〜P4が予め設定された正常な歩行動作時の基準値P0より大きいか否かをチェックする。S34において、検出値P1〜P4が予め設定された基準値P0より小さいときは(NOの場合)、歩行訓練装者Xがほとんど歩行訓練装置10Bに頼っていないので、上記S31に戻る。また、S34において、検出値P1〜P4が予め設定された基準値P0より大きいときは(YESの場合)、S35に進み、歩行訓練者Xが前傾姿勢で歩行しているものと判断する。
【0090】
そして、S36に進み、歩行動作補助装置210の駆動モータ220,222,224,226によるアシスト力(モータトルク)が過剰にならないようにモータトルクを所定割合(例えば、5%)抑制する。例えば、歩行訓練者Xが歩行訓練装置10Bに依存する割合に応じて、自律制御信号d2を所定割合減少させることにより、各駆動モータ220,222,224,226によるアシスト力(モータトルク)を減少させて歩行訓練者Xの歩行動作のバランスを保つようにする。この後は、上記S31に戻る。尚、駆動トルクの減少割合は、任意の割合に設定可能であり、5%に限らない。
【0091】
上記S32において、荷重センサ90A〜90Dの検出値P1〜P4が均等でないときは(NOの場合)、S37に進み、P1>P3または、P2>P4か否かをチェックする。S37において、P1>P3または、P2>P4の場合(YESの場合)は、歩行訓練者Xが把持部20の左側に体重をかけているため、S38に進み、歩行訓練者Xの姿勢が左側に傾いていると判断する。続いて、S39では、歩行訓練者Xの左脚が支持脚期(この支持脚は、前記支持脚30A〜30Dではなく、歩行訓練者Xの歩行における、支持脚期、遊脚期を表す。)にある場合は、歩行動作補助装置210の左側のモータ222,226による駆動トルクを所定割合(例えば、10%)増大させるように制御するとともに、遊脚期にある右脚が早く前に出るように、右側モータ220,224を駆動する。これで、歩行訓練者Xは、左側に傾いた状態でもバランスを崩すことがなく、早く右側に体重移動ができるようになり、歩行訓練を行なうことが可能になる。この後は、上記S31に戻る。
【0092】
また、上記S37において、P1>P3及び、P2>P4でない場合(NOの場合)は、S40に進み、P3>P1または、P4>P2か否かをチェックする。S40において、P3>P1または、P4>P2の場合(YESの場合)は、歩行訓練者Xが把持部20の右側に体重をかけているため、S41に進み、歩行訓練者Xの姿勢が右側に傾いていると判断する。続いて、S42では、歩行訓練者Xの右脚が支持脚期にある場合は、歩行動作補助装置210の右側のモータ220,224による駆動トルクを所定割合(例えば、10%)増大させるように制御するとともに、遊脚期にある左脚が早く前に出るように、左側モータ222,226を左脚が早く前に出るように駆動する。これで、歩行訓練者Xは、右側に傾いた状態でもバランスを崩すことがなく、早く左側に体重移動ができるようになり、歩行訓練を行なうことが可能になる。この後は、上記S31に戻る。尚、駆動トルクの増大割合は、任意の割合に設定可能であり、10%に限らない。
【0093】
また、S40において、P3>P1及び、P4>P2でない場合(NOの場合)は、歩行訓練者の姿勢(重心)が左右にぶれていないので、今回の制御処理を終了して上記S31に戻る。
【0094】
このように、歩行訓練者Xは、歩行訓練装置10Bの把持部20を把持しながら歩行動作補助装置210により左脚、右脚の動作に応じたアシスト力(モータトルク)を付与される。よって、歩行動作補助装置210の制御装置350は、複数の荷重センサ90A〜90Dにより検出された各検出値の左右方向の差に応じて当該歩行訓練者Xに付与する左脚アシスト力と右脚アシスト力とが各荷重センサ90A〜90Dの検出値とバランスするように各モータ220、222、224、226のモータトルクを制御し、歩行訓練者Xの上体が左右方向に傾いた姿勢になっても歩行訓練者Xを前進させることが可能になる。
【0095】
尚、上記実施例及び変形例においては、歩行訓練装置10、10A、10Bの把持部20の高さ調整位置を歩行訓練者Xの座位状態に対応した低位置と、歩行訓練者Xの立位状態に対応した高位置について説明したが、これらの調整された把持部20の高さ位置は、歩行訓練者Xの身長、あるいは腰の曲がり具合により姿勢や手、肩の位置によって変動するものであり、歩行訓練者X自身が訓練しやすい任意の高さ位置に調整することで、座位状態からの立ち上がり動作や、立位状態から座位への動作も容易に行える。
【符号の説明】
【0096】
10、10A、10B 歩行訓練装置
20 把持部
30A〜30D 支持脚
32 上部筒状体
34 下部筒状体
40 車輪
50A〜50D 高さ調整機構
52A〜52D 長さ位置検出センサ
60A,60B 操作部
62 操作レバー
66 伝達部材
70 伸縮部
80 駆動部
82 シリンダ
84 ピストンロッド
86 ロック解除部
87 押圧部
88 伝達ロッド
90A〜90D 荷重センサ
100、110 スイッチ
120 ドライバ回路
131〜134 ソレノイド
210 装着式歩行動作補助装置
218A 動作補助装着フレーム
220,222,224,226 駆動モータ
220a,222a,224a,226a 角度センサ
230 腰締結部材
231A〜231D 係止部
232,234 バッテリ
236 制御ユニット
238a,238b,240a,240b,242a,242b,244a,244b 生体信号検出センサ
250a,250b,252a,252b 床反力センサ
254 右脚補助部
255 左脚補助部
258 第1フレーム
260 第2フレーム
262 第3フレーム
278 腿締結部材
280 脛締結部材
310A〜310D ベルト繰り出し部
320A〜320D 布製ベルト
350 制御装置
360 生体電位処理手段
370 随意的制御手段
380 データベース
390 自律的制御手段
400 制御信号合成手段
410 駆動電流生成手段
【技術分野】
【0001】
本発明は歩行訓練装置に係り、特に歩行訓練者の姿勢に応じた歩行訓練を行えるように構成された歩行訓練装置に関する。
【背景技術】
【0002】
例えば、歩行訓練を行なう歩行訓練装置としては、歩行訓練者が立位の姿勢で掴まりながら押して歩くように構成された装置がある(例えば、特許文献1参照)。
【0003】
また、歩行訓練者の体重が全て下肢に作用しないように歩行訓練者の体を支えながら歩行する装置としては、特許文献2のものがある。この歩行訓練装置は、歩行訓練者に装着された装着具を上方からロープでつり上げると共に、ロープにバネ力を付与して上下動作を支えることで、下肢の負担を軽減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−209490号公報
【特許文献2】特開2007−229430号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1のものは、比較的軽量で歩行訓練者が容易に押して歩くことができるように構成されているが、歩行訓練者が立位の状態で歩行する場合にしか使えず、座位の状態から立位の状態に姿勢を変える場合に歩行訓練者の脚力が弱いと立ち上がることができないことがあり、姿勢に応じた訓練を行なうことが難しかった。
【0006】
また、特許文献2の歩行訓練装置では、歩行訓練者を上方からつり上げるように構成されているので、歩行訓練者の下肢の負担が少ないものの、装置全体が大掛かりになっており、重量もかなりあるので、歩行訓練者が歩行しにくいという問題があった。
【0007】
そこで、本発明は上記事情に鑑み、上記課題を解決した歩行訓練装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構を操作するための操作部と、を備え、
前記調整機構は、前記操作部の操作により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする。
(2)本発明は、前記操作部を前記把持部に設け、
前記把持部を把持している歩行訓練者が前記操作部を操作することにより、前記調整機構が前記把持部の位置を任意の高さ位置に調整することを特徴とする。
(3)本発明の前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする。
(4)本発明の前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする。
(5)本発明は、歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構の動作状態を制御する制御部と、
歩行訓練者に装着された歩行動作補助装置と前記制御部とを通信可能に接続する通信手段と、
を備え、
前記調整機構は、前記歩行動作補助装置からの制御信号により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする。
(6)本発明は、前記複数の支持脚の夫々に前記支持脚に作用する荷重を検出する複数の荷重センサとを有し、
前記通信手段は、前記複数の荷重センサにより検出された検出値を前記歩行動作補助装置の制御装置に送信し、当該歩行訓練者が前記把持部を把持しながら歩行する際の前記複数の荷重センサにより検出された各検出値の左右方向の差に応じて前記歩行動作補助装置が当該歩行訓練者に付与される左脚アシスト力と右脚アシスト力とが各検出値とバランスするように制御させることを特徴とする。
【発明の効果】
【0009】
本発明によれば、歩行訓練者の操作または意思により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることにより、歩行訓練者の姿勢に応じた訓練を容易に行えると共に、歩行訓練者の負担を軽減し、脚力の弱い歩行訓練者でも良い容易に歩行訓練を行なうことができる。
【図面の簡単な説明】
【0010】
【図1】本発明による歩行訓練装置の一実施例を示す側面図である。
【図2】図1に示す歩行訓練装置の平面図である。
【図3】図1に示す歩行訓練装置の背面図である。
【図4】支持脚の高さ調整機構が縮んだ状態を拡大して示す縦断面図である。
【図5】支持脚の高さ調整機構が伸びた状態を拡大して示す縦断面図である。
【図6】歩行訓練装置を座位状態で使用する場合を示す図である。
【図7】歩行訓練装置を立位状態で使用する場合を示す図である。
【図8】歩行訓練装置の変形例1を示すブロック図である。
【図9】装着式動作補助装置が歩行訓練者に装着された状態を斜め前方からみた斜視図である。
【図10】装着式動作補助装置が歩行訓練者に装着された状態を斜め後方からみた斜視図である。
【図11】歩行訓練装置の変形例2を示す斜視図である。
【図12】変形例2の歩行訓練装置を上方からみた平面図である。
【図13】変形例2の歩行訓練装置の制御部及び動作補助装置の制御系を示すブロック図である。
【図14】変形例2の歩行訓練装置を用いて動作補助装置の訓練動作を説明するための斜視図である。
【図15】動作補助装置の角度センサの制御処理を説明するためのフローチャートである。
【図16】歩行訓練装置の荷重センサの制御処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0012】
〔歩行訓練装置の構成〕
図1は本発明による歩行訓練装置の一実施例を示す側面図である。図2は図1に示す歩行訓練装置の平面図である。図3は図1に示す歩行訓練装置の背面図である。
【0013】
図1乃至図3に示されるように、歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。把持部20は、上方からみるとU字状に形成されており、内側に歩行訓練者の胴部分が入ることができる空間22が形成されている。また、歩行訓練装置10は、歩行訓練者が把持部20を把持することにより、歩行訓練を行なう歩行訓練者の転倒を防止することもできる。
【0014】
支持脚30A〜30Dは、4本設けられており、夫々上端が把持部20に結合され、下端が把持部20より外側に位置するように曲げられている。また、各支持脚30A〜30Dは、内部が中空とされた円筒形状の金属パイプからなり、下端には車輪40が取り付けられている。
【0015】
また、各支持脚30A〜30Dは、支持脚30の長さを任意の長さに調整するように構成された高さ調整機構50A〜50Dを有する。高さ調整機構50A〜50Dは、操作部60A,60Bの操作により把持部20の高さ位置を任意の高さ位置に調整するものであり、操作部60A,60Bを操作されないときは、調整された任意の高さ位置を維持するようにロックされている。
【0016】
操作部60A,60Bは、歩行訓練者が歩行訓練中に誤って操作しないように、把持部20の左右両側の外側に設けられている。また、左側に配された操作部60Aは、左側の高さ調整機構50A,50Bのロック解除を行えるように設けられ、右側に配された操作部60Bは、右側の高さ調整機構50C,50Dのロック解除を行えるように設けられている。
【0017】
また、操作部60A,60Bは、夫々、上下方向に回動操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。そして、高さ調整機構50A〜50Dは、操作レバー62を上方に引き上げられると、ロック解除されるように構成されており、ロック解除状態のときに上下方向の高さ位置を任意の高さ位置に調整可能となる。
【0018】
従って、高さ調整機構50A〜50Dは、歩行訓練者が座位状態から立上がる訓練を行なう際には、操作部60A,60Bが同時に操作されることにより把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
【0019】
歩行訓練装置10は、上記のように大掛かりな構成ではなく、軽量化が図られているため、歩行訓練者が脚力の弱い人の場合でも、容易に歩行訓練を行なうことができるように構成されている。
〔高さ調整機構の構成〕
ここで、高さ調整機構50A〜50Dの構成について説明する。図4は支持脚30(30A〜30D)の高さ調整機構50(50A〜50D)が縮んだ状態を拡大して示す縦断面図である。図5は支持脚30(30A〜30D)の高さ調整機構50(50A〜50D)が伸びた状態を拡大して示す縦断面図である。
【0020】
図4に示されるように、高さ調整機構50(50A〜50D)は、支持脚30(30A〜30D)の中空部に収納されており、支持脚30の上部筒状体32と下部筒状体34との間の延在方向の距離(長さ)を調整するように伸縮可能な構成になっている。高さ調整機構50(50A〜50D)は、夫々、上部筒状体32と下部筒状体34との間で伸縮する伸縮部70と、伸縮部70の内側に収納された駆動部80とを有する。伸縮部70は、上部筒状体32の下端に結合された上スリーブ72と、下部筒状体34の下スリーブ74とからなる。上スリーブ72は、外径が下スリーブ74の内径よりも小径であるので、下スリーブ74の内側に収納されるように伸縮動作する。
【0021】
駆動部80は、ガススプリングからなり、高圧ガスが封入されたシリンダ82と、ピストンロッド84とを有する。ピストンロッド84は、下端がシリンダ82内を摺動するピストンに結合され、上端がロック解除部86に結合されている。ロック解除部86は、上部筒状体32の底部に設けられた段部33に嵌合固定されている。尚、駆動部80を構成するガススプリングは、各支持脚30A〜30Dの全長に応じた長さのものを適宜選択することができ、且つ昇降動作による高さ調整範囲もピストンロッド84のストロークを選択することにより適宜設定することができる。また、駆動部80としては、ガススプリングに限らず、例えば、空気圧縮機からの圧縮空気をシリンダに供給するエア駆動方式、あるいはモータの回転力で上部筒状体32を昇降させるモータ駆動方式等を用いても良い。
【0022】
ロック解除部86は、上部筒状体32に挿通された伝達ロッド88を介して操作部60A,60Bの伝達部材66の回動力が伝達されて押圧部87が押下されることにより、シリンダ82内のガスの流通路を開放してロック解除を行なう。これにより、ピストンロッド84は、シリンダ82内のガスの流通路が開放されている間に延在方向(上下方向)に摺動可能になる。尚、歩行訓練者が操作部60A,60Bの操作レバー62に対する押圧操作を解除すると、ロック解除部86に対する押圧力が伝達されなくなるため、シリンダ82内のガスの流通路を閉止するロック状態に復帰する。
【0023】
図5に示されるように、歩行訓練者が操作部60A,60Bの操作レバー62を押下した場合、操作レバー62の回動力が伝達部材66及び伝達ロッド88を介してロック解除部86の押圧部87に伝達され、シリンダ82内のガスの流通路が開放されるため、各高さ調整機構50A〜50Dは高さ調整可能状態に切り替わる。この高さ調整可能状態では、ロック解除状態であるので、ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。その結果、各支持脚30A〜30Dの上部筒状体32と下部筒状体34との間との間隔が拡張されて支持脚30の延在方向の長さが伸長するように動作する。
【0024】
図6は歩行訓練装置10を座位状態で使用する場合を示す図である。図6に示されるように、操作部60A、60Bの操作によりロック解除状態で歩行訓練者Xが体重を把持部20に作用させるか、あるいは把持部20を下方に押圧することでピストンロッド84を押し上げるガス圧よりも下方への押圧力の方が大きいので、各支持脚30A〜30Dの各ピストンロッド84が縮み方向に動作して把持部20が降下する。従って、把持部20に対する垂下方向の押圧力を加減することにより、ピストンロッド84の昇降位置を調整することが可能になる。
【0025】
そして、歩行訓練者Xが座位の状態の場合には、把持部20の高さ位置が座位状態で使用しやすい低い位置に降下したとき、操作部60A,60Bの操作レバー62から手を離して各高さ調整機構50A〜50Dのロック解除操作を停止し、ロック状態に復帰させる。これにより、歩行訓練者Xは、座位状態に対応した高さ位置(低位置)に調整された把持部20を把持することで、比較的容易に座位状態から立位に立ち上がることが可能になる。
【0026】
また、歩行訓練者Xは、立位状態になった後も座位状態に対応した高さ位置(低位置)に調整された把持部20を把持することにより、座位状態に移行する動作過程でもバランスを崩すことなく座ることが可能になる。
【0027】
図7は歩行訓練装置10を立位状態で使用する場合を示す図である。図7に示されるように、歩行訓練者Xが立位状態になったとき、再度、操作部60A,60Bの操作レバー62を押下する方向に操作することにより、各高さ調整機構50A〜50Dの各駆動部80のロックが解除される。この場合、把持部20を下方に押圧する力を弱めることにより、各高さ調整機構50A〜50Dの各ピストンロッド84がシリンダ82内のガス圧の作用によって上動し、把持部20が座位の高さ位置から立位の高さ位置に変化する。
【0028】
この立位の状態では、把持部20が歩行訓練者Xの両脇を支える位置に上昇しており、脚力が低下した歩行訓練者Xでも転倒防止されると共に、歩行訓練装置10を強く押さなくても脚を前に出すことで前進することができ、自然に歩行訓練を行なうことが可能になる。
〔変形例1〕
図8は歩行訓練装置の変形例1を示すブロック図である。図8に示されるように、変形例1の歩行訓練装置10Aは、把持部20の左右両側の外側に操作部としての第1、第2のスイッチ100、110が設けられている。この第1、第2のスイッチ100、110は、プッシュ式スイッチからなり、小さな力で押圧すると、ロック解除信号をドライバ回路120に出力する。ドライバ回路120では、アンド回路を有しており、スイッチ100、110が同時にオンになると、各ソレノイド131〜134に通電して各ソレノイド131〜134を励磁状態に切り替える。これにより、スイッチ100、110のいずれか一方が間違ってオンに操作されても各ソレノイド131〜134が誤動作しないようになっている。
【0029】
すなわち、スイッチ100、110が同時にオン操作された場合のみ各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。従って、本変形例では、スイッチ100、110がオンに操作されると、上記操作部60A,60Bの操作レバー62を押下したのと同じロック解除動作が行なわれ、各高さ調整機構50A〜50Dの各ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。また、歩行訓練者Xがスイッチ100、110をオンに操作した状態で把持部20を下方に押圧することで、各高さ調整機構50A〜50Dの長さが調整され、把持部20の高さ位置を任意の高さ位置に調整することが可能になる。
【0030】
また、歩行訓練者Xがスイッチ100、110から手を離してオフ状態に切り替えることにより、ドライバ回路120は、各ソレノイド131〜134への通電を停止して各ソレノイド131〜134を消磁状態に切り替える。この場合、各ソレノイド131〜134による押圧力が無くなると共に、高さ調整機構50A〜50Dの各駆動部80がロック状態に復帰し、把持部20が任意の高さに保持される。
〔変形例2〕
歩行訓練装置の変形例2を説明する前に歩行訓練者が歩行訓練の際に装着する装着式歩行動作補助装置について説明する。
【0031】
図9は装着式歩行動作補助装置が歩行訓練者に装着された状態を斜め前方からみた斜視図である。図10は装着式歩行動作補助装置が歩行訓練者に装着された状態を斜め後方からみた斜視図である。
【0032】
図9及び図10に示されるように、装着式歩行動作補助装置(以下「歩行動作補助装置」と称する)210は、例えば、骨格筋の筋力低下により歩行が不自由な下肢運動機能障害者、あるいは、歩行運動のリハビリを行う患者などのように自力歩行が困難な人の歩行動作を補助(アシスト)する装置であり、脳からの信号により筋力を発生させる際に生じる生体信号(表面筋電位)を検出し、この検出信号に基づいてアクチュエータからの駆動力を付与するように作動する。
【0033】
歩行動作補助装置210を装着した歩行訓練者Xは、自らの意思で歩行動作を行うと、その際に発生した生体信号に応じた駆動トルクがアシスト力として歩行動作補助装置210から付与され、例えば、通常歩行で必要とされる筋力の半分の力で歩行することが可能になる。従って、歩行訓練者Xは、自身の筋力とアクチュエータ(本実施例では、電動式の駆動モータを用いる)からの駆動トルクとの合力によって全体重を支えながら歩行することができる。
【0034】
その際、歩行動作補助装置210は、歩行動作に伴う重心の移動に応じて付与されるアシスト力(モータトルク)が歩行訓練者Xの意思を反映するように制御している。そのため、歩行動作補助装置210のアクチュエータは、歩行訓練者Xの意思に反するような負荷を与え無いように制御されており、歩行訓練者Xの動作を妨げないように制御される。
【0035】
また、歩行動作補助装置210は、歩行動作以外にも、例えば、歩行訓練者Xが椅子に座った座位状態から立ち上がる際の動作、あるいは立位状態から椅子に腰掛ける際の動作も補助することができる。特に歩行訓練者Xの筋力が弱っている場合には、椅子から立ち上がる動作を行うことが難しいが、歩行動作補助装置210を装着した歩行訓練者Xは、自らの意思に応じて駆動トルクを付与されて筋力の低下を気にせずに動作することが可能になる。
【0036】
ここで、歩行動作補助装置210の構成の一例について説明する。歩行動作補助装置210は、図9及び図10に示されるように、歩行訓練者Xに装着される動作補助装着フレーム218Aに駆動部を設けたものである。駆動部としては、歩行訓練者Xの右側股関節に位置する右腿駆動モータ220と、歩行訓練者Xの左側股関節に位置する左腿駆動モータ222と、歩行訓練者Xの右膝関節に位置する右膝駆動モータ224と、歩行訓練者Xの左膝関節に位置する左膝駆動モータ226とを有する。これらの駆動モータ220,222,224,226は、制御装置からの制御信号により駆動トルクを制御されるDCモータまたはACモータなどからなる電動モータからなり、モータ回転を所定の減速比で減速する減速機構(駆動部に内蔵)を有している。また、歩行動作補助装置210の各関節を駆動する駆動モータ220,222,224,226には、各関節の角度検出値を検出する角度センサ220a,222a,224a,226aが内蔵されている。
【0037】
また、歩行訓練者Xの腰の周囲に装着される腰締結部材230には、駆動モータ220,222,224,226を駆動させるための電源として機能するバッテリ232,234が取り付けられている。バッテリ232、234は、充電式バッテリであり、歩行訓練者Xの歩行動作を妨げないように左右に分散配置されている。
【0038】
また、歩行訓練者Xの背面側となる腰締結部材230の後側には、制御ユニット236が取り付けられている。さらに、腰締結部材230の外周側面(左右両側の前後位置)には、後述する各布製ベルト320A〜320Dの端部を係止する係止部231(231A〜231D)に設けられている(図12参照)。
【0039】
そして、歩行動作補助装置210は、歩行訓練者Xの右腿の動きに伴う生体電位を検出する生体信号検出センサ238a,238bと、歩行訓練者Xの左腿の動きに伴う生体電位を検出する生体信号検出センサ240a,240bと、右膝の動きに伴う生体電位を検出する生体信号検出センサ242a,242bと、左膝の動きに伴う生体電位を検出する生体信号検出センサ244a,244bとを有する。
【0040】
これらの各生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、筋電位信号や神経伝達信号などの生体電位信号を皮膚を介して検出する生体信号検出手段であり、微弱電位を検出するための電極(図示せず)を有する。尚、本実施例では、各生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、電極の周囲を覆う粘着シールにより歩行訓練者Xの皮膚表面に貼着するように取り付けられる。
【0041】
人体においては、脳からの指令によって骨格筋を形成する筋肉の表面にシナプス伝達物質のアセチルコリンが放出される結果、筋線維膜のイオン透過性が変化して活動電位が発生する。そして、活動電位によって筋線維の収縮が発生し、筋力を発生させる。そのため、骨格筋の電位を検出することにより、歩行動作の際に生じる筋力を推測することが可能になり、この推測された筋力に基づく仮想トルクから歩行動作に必要なアシスト力を求めることが可能になる。
【0042】
従って、歩行動作補助装置210では、これらの生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bによって検出された生体信号に基づいて4個の駆動モータ220,222,224,226に供給する駆動電流を求め、この駆動電流で駆動モータ220,222,224,226を駆動することで、アシスト力が付与されて歩行訓練者Xの歩行動作を補助するように構成されている。
【0043】
また、歩行動作による重心移動をスムーズに行うため、脚の裏にかかる荷重を検出する必要がある。そのため、歩行訓練者Xの左右脚の裏には、床反力センサ250a,250b,252a,252b(図9及び図10中、破線で示す)が設けられている。
【0044】
また、床反力センサ250aは、右脚前側の荷重に対する反力を検出し、床反力センサ250bは、右脚後側の荷重に対する反力を検出する。床反力センサ252aは、左脚前側の荷重に対する反力を検出し、床反力センサ252bは、左脚後側の荷重に対する反力を検出する。各床反力センサ250a,250b,252a,252bは、例えば、印加された荷重に応じた電圧を出力する圧電素子などからなり、体重移動に伴う荷重変化、及び歩行訓練者Xの脚と地面との接地の有無を夫々検出することができる。
【0045】
動作補助装着フレーム218Aは、歩行訓練者Xの腰に装着される腰締結部材230と、第1締結部材の右側部から下方に設けられた右脚補助部254と、腰締結部材230の左側部から下方に設けられた左脚補助部255とを有する。
【0046】
右脚補助部254と左脚補助部255とは、左右対称に配置されており、腰締結部材230に固定されたブラケット256と、ブラケット256より下方に延在し歩行訓練者Xの腿外側に沿うように形成された第1フレーム258と、第1フレーム258より下方に延在し歩行訓練者Xの脛外側に沿うように形成された第2フレーム260と、歩行訓練者Xの脚の裏(靴を履く場合には、靴底)が載置される第3フレーム262とを有する。
【0047】
さらに、駆動モータ220,222,224,226は、関節角度を検出する角度センサ220a,222a,224a,226aを有する。この角度センサ220a,222a,224a,226aは、例えば、腰関節及び膝関節の関節角度に比例したパルス数をカウントするロータリエンコーダなどからなり、関節角度に応じたパルス数に対応した電気信号をセンサ出力として出力する。
【0048】
また、第1フレーム258の長手方向の中間位置には、歩行訓練者Xの腿に締結されるベルト状の腿締結部材278が取り付けられている。また、第2フレーム260の長手方向の中間位置には、歩行訓練者Xの膝下の脛に締結されるベルト状の脛締結部材280が取り付けられている。
【0049】
従って、駆動モータ220,222,224,226で発生された駆動トルクは、ギヤを介して第1フレーム258、第2フレーム260に伝達され、さらに腿締結部材278、脛締結部材280を介して歩行訓練者Xの脚にアシスト力(補助力)として伝達される。
【0050】
また、第2フレーム260の下端には、足首関節268を介して靴284が回動可能に連結されている。
【0051】
各フレーム258,260,262は、夫々ジュラルミン等の軽量化された金属材の周囲を弾性を有する樹脂材で覆うように構成されており、腰締結部材230に取り付けられたバッテリ232,234、制御ユニット236等の動作補助装着フレーム218Aの重量を支えることができる。すなわち、歩行動作補助装置210は、動作補助装着フレーム218Aなどの重量が歩行訓練者Xに作用しないように構成されており、歩行訓練者Xに余計な荷重を与えないように取り付けられる。
【0052】
図11は本発明による歩行訓練装置の変形例2を示す斜視図である。図11に示されるように、歩行訓練者Xは、歩行動作補助装置210を最初に装着して歩行訓練を行なう際、歩行訓練装置10Bを用いて歩行訓練を行なう。歩行動作補助装置210は、歩行訓練者Xの生体電位信号に基づき各関節の駆動モータ220,222,224,226を制御して歩行のための駆動トルクを歩行訓練者Xの脚に伝達する。しかしながら、歩行訓練者Xは、歩行動作補助装置210を装着した状態での歩行訓練を初め行なう場合、歩行動作補助装置210によるアシスト力がどのように作用するのかを体感しておらず、精神的に不安を感じることがある。そのような場合には、歩行動作補助装置210を装着した歩行訓練者Xは、歩行訓練装置10Bによる歩行支援を受けながら歩行訓練を行なうと安心する。
【0053】
歩行訓練装置10Bは、歩行動作補助装置210の動作制御に連動して把持部20の高さ位置を自動的に調整する機能を有する。すなわち、歩行動作補助装置210を装着した歩行訓練者Xが座位状態になると、歩行動作補助装置210の制御ユニット236から歩行訓練者Xの動き(姿勢)に応じた制御信号が出力されると、当該制御信号に基づいて歩行訓練装置10Bは、各高さ調整機構50A〜50Dの駆動部80をロック解除状態に切り替えて把持部20の高さを歩行訓練者Xの動き、身長、姿勢に応じた高さ位置に調整可能となる。
【0054】
また、各高さ調整機構50A〜50Dには、駆動部80のピストンロッド84が伸び状態か縮み状態かを検出する長さ位置検出センサ52A〜52Dが設けられている。
【0055】
また、各支持脚30A〜30Dの下端には、荷重センサ90A〜90Dが取り付けられている。荷重センサ90A〜90Dは、歪みゲージあるいは圧電素子からなり、各支持脚30A〜30Dの夫々に付加された荷重の大きさに応じた検出信号を出力する。
【0056】
図12は変形例2の歩行訓練装置を上方からみた平面図である。図12に示されるように、歩行訓練装置10Bは、U字状に形成された把持部20の内側の4箇所にベルト繰り出し部310A〜310Dを有する。ベルト繰り出し部310A〜310Dは、歩行訓練者Xに向かう方向(中心に向かう方向)に布製ベルト320A〜320Dを繰り出すと共に、所定以上の張力が作用したときは布製ベルト320A〜320Dを強制的に巻き取るプリテンショナーを有する。
【0057】
歩行訓練を行なう際には、各布製ベルト320A〜320Dの端部に設けられたフック330A〜330Dを歩行動作補助装置210の腰締結部材230の外周側面に設けられた各係止部231A〜231Dに係止させる。各布製ベルト320A〜320Dは、歩行訓練者Xが通常の動きをしているときは、弛んだ状態であるので、歩行動作を妨げることがない。しかしながら、例えば、歩行訓練Xがバランスを崩して体が左右方向に傾いたり、あるいは歩行動作時に靴が滑って急速に前後方向の重心移動が生じたとき、布製ベルト320A〜320Dのいずれかの張力が増大する。これにより、布製ベルト320A〜320Dは、ベルト繰り出し部310A〜310Dのプリテンショナーによって瞬時に巻き取られ把持部20との間で張力を増大させたベルト拘束状態に切り替わる。
【0058】
これにより、歩行訓練者Xは、各布製ベルト320A〜320Dの張力を介して把持部20に支えられ、転倒することを防止される。
【0059】
図13は変形例2の歩行訓練装置の制御部及び動作補助装置の制御系を示すブロック図である。図13に示されるように、歩行動作補助装置210の制御ユニット236に搭載された制御装置350は、生体電位処理手段360、随意的制御手段370、データベース380、自律的制御手段390、制御信号合成手段400、駆動電流生成手段410を有する。
【0060】
生体信号検出センサ238a,238b,240a,240b,242a,242b,244a,244bは、歩行訓練者Xの歩行動作によって発生する生体電位信号aを検出して生体電位処理手段360に入力する。生体電位処理手段360は、生体電位信号aから神経伝達信号bおよび筋電位信号cを抽出して随意的制御手段370に入力する。
【0061】
随意的制御手段370は、歩行動作補助装置210が装着された歩行訓練者Xの意思による歩行動作の際に生じる生体電位信号aから得られた神経伝達信号bおよび筋電位信号cに基づいて随意的制御信号d1を生成する。
【0062】
また、自律的制御手段390は、神経伝達信号bおよび筋電位信号cに基づいて自律制御信号d2を生成する。また、随意的制御手段370および自律的制御手段390は、各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270により検出された物理量とデータベース380に格納された基準パラメータとを比較することにより、歩行訓練者Xが行おうとしているタスクのフェーズを推定し、このフェーズに応じたハイブリッド比およびパワーアシスト率となるように、随意的制御信号d1および自律的制御信号d2を生成し、制御信号合成手段400に供給する。
【0063】
制御信号合成手段400では、随意的制御手段370からの随意制御信号d1と、自律的制御手段390からの自律制御信号d2とを合成して駆動信号dを生成する。
【0064】
駆動電流生成手段410は、制御信号合成手段400からの制御信号dに基づいてモータ駆動電流eを生成して各駆動モータ220,222,224,226に出力する。駆動モータ220,222,224,226の駆動力により歩行動作補助装置210のフレーム258、260が駆動され、フレーム258、260を介してモータトルクが歩行訓練者Xの脚に伝達される。
【0065】
また、歩行動作に伴って各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270で検出されたセンサ信号fが随意的制御手段370及び自律制御手段390にフィードバックされる。そして、随意的制御手段370及び自律制御手段390では、神経伝達信号bと筋電位信号cとセンサ信号fとの組合せに基づいて随意的制御信号d1、自律制御信号d2を生成する。
【0066】
そして、制御信号合成手段400は、随意的制御手段370及び自律制御手段390からの随意的制御信号d1、自律制御信号d2に基づいて歩行動作補助装置210の駆動モータ220,222,224,226(図9、図10を参照)の駆動を制御する制御信号と、各物理量センサ(モータのトルクセンサ、各関節の角度センサ、床反力センサを含む)270により検出された歩行訓練者Xの動作、姿勢に関する物理量からデータベース380からタスクのフェーズを推定し、推定したフェーズに対応するパワーアシスト率となるように駆動力を駆動モータ220,222,224,226に発生させる制御信号とを生成する。
【0067】
制御信号合成手段400で生成された制御信号は、無線通信装置420を介して無線信号gに変換される。さらに、無線信号gは、歩行訓練装置10Bに搭載された無線通信装置430に受信され、ドライバ回路120に入力される。ドライバ回路120は、前述した変形例1の場合と同様に、各ソレノイド131〜134(図8参照)に通電して各ソレノイド131〜134を励磁状態に切り替える。各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。
【0068】
これにより、各高さ調整機構50A〜50Dの駆動部80のロック解除動作が行なわれ、各ピストンロッド84がシリンダ82内のガス圧の作用によって上動する。また、歩行訓練者Xがこのロック解除状態で把持部20を下方に押圧する押圧力を加減することで、各高さ調整機構50A〜50Dの長さが調整され、把持部20の高さ位置を任意の高さ位置に調整することが可能になる。尚、歩行訓練者Xは、把持部20に設けられたスイッチ100、110をオンに切り替えると、手動操作により各高さ調整機構50A〜50Dの駆動部80をロック解除して把持部20の高さ位置を調整することができる。
【0069】
図14は変形例2の歩行訓練装置10Bを用いて歩行動作補助装置210の訓練動作を説明するための斜視図である。図14に示されるように、歩行訓練者が座位状態になったときは、膝関節の回動角度が90度未満になったことを駆動モータ224,226に内蔵された角度センサ224a、226aにより検出され、当該角度検出信号が無線通信装置420、430を介してドライバ回路120に入力される。これにより、ドライバ回路120は、前述した変形例1の場合と同様に、各ソレノイド131〜134(図8参照)に通電して各ソレノイド131〜134を励磁状態に切り替える。各ソレノイド131〜134は、駆動部80のロック解除部86を押圧する押圧力を発生するように動作する。
【0070】
このように、各高さ調整機構50A〜50Dの駆動部80のロック解除動作が行なわれた状態で、歩行訓練者Xが把持部20を下方に押圧することで、各ピストンロッド84が縮み方向に摺動し、把持部20は座位状態に適した高さに降下する。
【0071】
座位状態から立ち上がる際は、歩行訓練装置10Bの把持部20が座位状態に応じた低い位置に降下しているので、歩行訓練者Xは、把持部20に掴まりやすく、容易に立ち上がることができ、立上がり動作過程でバランスを崩すことが防止される。
【0072】
また、歩行訓練者Xは、立位の状態でも把持部20を把持することにより、立位状態から座位に移行する動作過程でもバランスを崩すことなく座ることが可能になる。
【0073】
また、各支持脚30A〜30Dの下端に設けられた荷重センサ90A〜90Dの検出信号は、無線通信装置430を介して無線信号hに変換される。無線信号hは、歩行動作補助装置210に搭載された無線通信装置420に受信され、自律制御手段390に入力される。そのため、自律制御手段390は、荷重センサ90A〜90Dの検出信号によって歩行訓練者Xがどの程度歩行訓練装置10Bに体重を掛けているかを判別し、歩行訓練者Xが歩行訓練装置10Bに依存する割合を演算する。この演算結果により、自律制御手段390は、自律制御信号d2を補正する。
【0074】
例えば、歩行訓練者Xが歩行訓練装置10Bに依存する割合が50%の場合には、自律制御信号d2を30%減少させる。また、歩行訓練者Xが歩行訓練装置10Bに依存する割合が20%の場合には、自律制御信号d2を10%減少させる。これにより、歩行動作補助装置210の駆動モータ220,222,224,226によるアシスト力(モータトルク)が過剰にならないように抑制することができる。
【0075】
ここで、制御装置350が実行する角度センサの制御処理について説明する。図15は動作補助装置の角度センサの制御処理を説明するためのフローチャートである。
【0076】
図15に示されるように、制御装置350は、S11で、歩行動作補助装置210の各関節を駆動する駆動モータ220,222,224,226に内蔵された角度センサ220a,222a,224a,226aにより検出された各関節の角度検出値を読み込む。続いて、S12に進み、角度センサ224a,226aにより検出された膝関節角度が予め設定された所定の立位判定角度(例えば、150度)以上か否かをチェックする。尚、膝関節角度の立位判定角度は、任意の所定角度に設定可能であり、150度に限らない。
【0077】
S12において、角度センサ224a,226aにより検出された膝関節角度が所定角度(例えば、150度)以上の場合(YESの場合)には、S13に進み、角度センサ220a,222aにより検出された腰関節角度が予め設定された所定の立位判定角度(例えば、150度)以上か否かをチェックする。尚、腰関節角度の立位判定角度は、任意の所定角度に設定可能であり、150度に限らない。
【0078】
S13において、角度センサ220a,222aにより検出された腰関節角度が所定角度(例えば、150度)以上の場合(YESの場合)には、S14に進み、当該歩行訓練者Xが立位の姿勢であると判定する。次のS15では、各支持脚30A〜30Dの各高さ調整機構50A〜50Dに設けられた長さ位置検出センサ52A〜52Dの長さ検出値を読み込み、歩行訓練装置10Bの把持部20の高さ位置(最大長さ)が立位状態であるか否かをチェックする。
【0079】
S15において、歩行訓練装置10Bの把持部20の高さ位置(最大長さ)が立位状態であるときは、歩行訓練者Xの姿勢(立位)と一致するので、S16の処理を行なわず、S15において、歩行訓練装置10Bの把持部20の高さ位置が座位状態であるときは、歩行訓練者Xの姿勢(立位)と一致しないので、S16に進み、歩行訓練装置10Bの高さ調整を行なうように歩行訓練装置10Bに支持する。これにより、歩行訓練装置10Bでは、ドライバ回路120が、各ソレノイド131〜134(図8参照)に通電して各高さ調整機構50A〜50Dの駆動部80のロック解除動作を行なう。これにより、各駆動部80の各ピストンロッド84がシリンダ82内のガス圧の作用によって上動して把持部20の高さ位置を立位の高さ位置(図11参照)に調整することが可能になる。
【0080】
また、上記S12において、検出された膝関節角度が所定角度(例えば、150度)未満の場合(NOの場合)には、S17に進み、角度センサ220a,222aにより検出された腰関節角度が所定の座位判定角度(例えば、120度)以下か否かをチェックする。尚、腰関節角度の座位判定角度は、任意の座位所定角度に設定可能であり、120度に限らない。
【0081】
S17において、腰関節角度が所定の座位判定角度(例えば、120度)以下のときは、歩行訓練者Xが座っている可能性が高いので、S19に進み、当該歩行訓練者Xが座位の姿勢であると判定する。また、S13において、腰関節角度が所定の立位判定角度(例えば、150度)未満の場合(NOの場合)には、S18に進み、角度センサ224a、226aにより検出された膝関節角度が所定の座位判定角度(例えば、120度)以下か否かをチェックする。尚、膝関節角度の座位判定角度は、任意の座位所定角度に設定可能であり、120度に限らない。
【0082】
S18において、膝関節角度が所定の座位判定角度(例えば、120度)以下のときは、歩行訓練者Xが座っている可能性が高いので、S19に進み、当該歩行訓練者Xが座位の姿勢であると判定する。
【0083】
次のS20では、各支持脚30A〜30Dの各高さ調整機構50A〜50Dに設けられた長さ位置検出センサ52A〜52Dの長さ検出値を読み込み、歩行訓練装置10Bの把持部20の高さ位置が座位状態(低位置)であるか否かをチェックする。
【0084】
S20において、歩行訓練装置10Bの把持部20の高さ位置が座位状態(低位置)であるときは、歩行訓練者Xの姿勢(座位)と一致するので、S21の処理を行なわず、S20において、歩行訓練装置10Bの把持部20の高さ位置が立位状態であるときは、歩行訓練者Xの姿勢(座位)と一致しないので、S21に進み、歩行訓練装置10Bの高さ調整を行なうように歩行訓練装置10Bに指示する。これにより、歩行訓練装置10Bでは、ドライバ回路120が、各ソレノイド131〜134(図8参照)に通電して各高さ調整機構50A〜50Dの駆動部80のロック解除動作を行なう。これにより、歩行訓練者Xが把持部20を下方に押圧することで、各ピストンロッド84が縮み方向に摺動し、把持部20は座位状態(図14参照)に適した高さに降下する。
【0085】
従って、歩行訓練者Xは、座位状態から立ち上がる際は、歩行訓練装置10Bの把持部20が座位状態に応じた低い位置に降下しているので、把持部20に掴まりやすく、立ち上がり動作過程でバランスを崩すことが防止される。
【0086】
また、上記S17において、腰関節角度が所定角度(例えば、120度)以下でないときは、立位状態である可能性が高いので、S18に進み、膝関節角度が所定角度(例えば、120度)以下か否かをチェックする。また、S18において、膝関節角度が120度以下でないときは、歩行訓練者Xが立位状態である可能性が高いので、S14に進み、当該歩行訓練者Xが立位状態であると判定する。この後は、前述した場合と同様に、歩行訓練者Xが立位状態に応じた高さ調整を行なう。
【0087】
ここで、歩行訓練装置10Bの荷重センサの制御処理について説明する。図16は歩行訓練装置10Bの荷重センサ90A〜90Dの制御処理を説明するためのフローチャートである。尚、歩行訓練者Xが歩行動作補助装置210を装着した状態で歩行訓練装置10Bによる歩行訓練を行う場合、歩行訓練者Xは、右脚と左脚とを交互に前に出して歩行する。その際、歩行訓練者Xの左右脚のうち地面に接地している方が支持脚期となり、地面から離れて前へ移動する脚が遊脚期となる。すなわち、歩行訓練者Xは、支持脚期となる右脚(又は左脚)が体重を支え、遊脚期となる左脚(又は右脚)がバランスを取りながら前へ移動する。
【0088】
図16に示されるように、制御装置350は、S31で無線通信装置420、430(通信手段)を介して各支持脚30A〜30Dに設けられた荷重センサ90A〜90Dの検出値P1〜P4を読み込む。次のS32において、荷重センサ90A〜90Dの検出値P1〜P4がほぼ等しいか否かをチェックする。S32において、荷重センサ90A〜90Dの検出値P1〜P4がほぼ等しいときは、各支持脚30A〜30Dに均等に荷重が作用しているので、歩行訓練者Xが正しい姿勢(直立状態に近い歩行姿勢)で歩行しているものと判断する。
【0089】
続いて、S34では、荷重センサ90A〜90Dの検出値P1〜P4が予め設定された正常な歩行動作時の基準値P0より大きいか否かをチェックする。S34において、検出値P1〜P4が予め設定された基準値P0より小さいときは(NOの場合)、歩行訓練装者Xがほとんど歩行訓練装置10Bに頼っていないので、上記S31に戻る。また、S34において、検出値P1〜P4が予め設定された基準値P0より大きいときは(YESの場合)、S35に進み、歩行訓練者Xが前傾姿勢で歩行しているものと判断する。
【0090】
そして、S36に進み、歩行動作補助装置210の駆動モータ220,222,224,226によるアシスト力(モータトルク)が過剰にならないようにモータトルクを所定割合(例えば、5%)抑制する。例えば、歩行訓練者Xが歩行訓練装置10Bに依存する割合に応じて、自律制御信号d2を所定割合減少させることにより、各駆動モータ220,222,224,226によるアシスト力(モータトルク)を減少させて歩行訓練者Xの歩行動作のバランスを保つようにする。この後は、上記S31に戻る。尚、駆動トルクの減少割合は、任意の割合に設定可能であり、5%に限らない。
【0091】
上記S32において、荷重センサ90A〜90Dの検出値P1〜P4が均等でないときは(NOの場合)、S37に進み、P1>P3または、P2>P4か否かをチェックする。S37において、P1>P3または、P2>P4の場合(YESの場合)は、歩行訓練者Xが把持部20の左側に体重をかけているため、S38に進み、歩行訓練者Xの姿勢が左側に傾いていると判断する。続いて、S39では、歩行訓練者Xの左脚が支持脚期(この支持脚は、前記支持脚30A〜30Dではなく、歩行訓練者Xの歩行における、支持脚期、遊脚期を表す。)にある場合は、歩行動作補助装置210の左側のモータ222,226による駆動トルクを所定割合(例えば、10%)増大させるように制御するとともに、遊脚期にある右脚が早く前に出るように、右側モータ220,224を駆動する。これで、歩行訓練者Xは、左側に傾いた状態でもバランスを崩すことがなく、早く右側に体重移動ができるようになり、歩行訓練を行なうことが可能になる。この後は、上記S31に戻る。
【0092】
また、上記S37において、P1>P3及び、P2>P4でない場合(NOの場合)は、S40に進み、P3>P1または、P4>P2か否かをチェックする。S40において、P3>P1または、P4>P2の場合(YESの場合)は、歩行訓練者Xが把持部20の右側に体重をかけているため、S41に進み、歩行訓練者Xの姿勢が右側に傾いていると判断する。続いて、S42では、歩行訓練者Xの右脚が支持脚期にある場合は、歩行動作補助装置210の右側のモータ220,224による駆動トルクを所定割合(例えば、10%)増大させるように制御するとともに、遊脚期にある左脚が早く前に出るように、左側モータ222,226を左脚が早く前に出るように駆動する。これで、歩行訓練者Xは、右側に傾いた状態でもバランスを崩すことがなく、早く左側に体重移動ができるようになり、歩行訓練を行なうことが可能になる。この後は、上記S31に戻る。尚、駆動トルクの増大割合は、任意の割合に設定可能であり、10%に限らない。
【0093】
また、S40において、P3>P1及び、P4>P2でない場合(NOの場合)は、歩行訓練者の姿勢(重心)が左右にぶれていないので、今回の制御処理を終了して上記S31に戻る。
【0094】
このように、歩行訓練者Xは、歩行訓練装置10Bの把持部20を把持しながら歩行動作補助装置210により左脚、右脚の動作に応じたアシスト力(モータトルク)を付与される。よって、歩行動作補助装置210の制御装置350は、複数の荷重センサ90A〜90Dにより検出された各検出値の左右方向の差に応じて当該歩行訓練者Xに付与する左脚アシスト力と右脚アシスト力とが各荷重センサ90A〜90Dの検出値とバランスするように各モータ220、222、224、226のモータトルクを制御し、歩行訓練者Xの上体が左右方向に傾いた姿勢になっても歩行訓練者Xを前進させることが可能になる。
【0095】
尚、上記実施例及び変形例においては、歩行訓練装置10、10A、10Bの把持部20の高さ調整位置を歩行訓練者Xの座位状態に対応した低位置と、歩行訓練者Xの立位状態に対応した高位置について説明したが、これらの調整された把持部20の高さ位置は、歩行訓練者Xの身長、あるいは腰の曲がり具合により姿勢や手、肩の位置によって変動するものであり、歩行訓練者X自身が訓練しやすい任意の高さ位置に調整することで、座位状態からの立ち上がり動作や、立位状態から座位への動作も容易に行える。
【符号の説明】
【0096】
10、10A、10B 歩行訓練装置
20 把持部
30A〜30D 支持脚
32 上部筒状体
34 下部筒状体
40 車輪
50A〜50D 高さ調整機構
52A〜52D 長さ位置検出センサ
60A,60B 操作部
62 操作レバー
66 伝達部材
70 伸縮部
80 駆動部
82 シリンダ
84 ピストンロッド
86 ロック解除部
87 押圧部
88 伝達ロッド
90A〜90D 荷重センサ
100、110 スイッチ
120 ドライバ回路
131〜134 ソレノイド
210 装着式歩行動作補助装置
218A 動作補助装着フレーム
220,222,224,226 駆動モータ
220a,222a,224a,226a 角度センサ
230 腰締結部材
231A〜231D 係止部
232,234 バッテリ
236 制御ユニット
238a,238b,240a,240b,242a,242b,244a,244b 生体信号検出センサ
250a,250b,252a,252b 床反力センサ
254 右脚補助部
255 左脚補助部
258 第1フレーム
260 第2フレーム
262 第3フレーム
278 腿締結部材
280 脛締結部材
310A〜310D ベルト繰り出し部
320A〜320D 布製ベルト
350 制御装置
360 生体電位処理手段
370 随意的制御手段
380 データベース
390 自律的制御手段
400 制御信号合成手段
410 駆動電流生成手段
【特許請求の範囲】
【請求項1】
歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構を操作するための操作部と、を備え、
前記調整機構は、前記操作部の操作により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする歩行訓練装置。
【請求項2】
前記操作部を前記把持部に設け、
前記把持部を把持している歩行訓練者が前記操作部を操作することにより、前記調整機構が前記把持部の位置を任意の高さ位置に調整することを特徴とする請求項1に記載の歩行訓練装置。
【請求項3】
前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする請求項1または2に記載の歩行訓練装置。
【請求項4】
前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする請求項1乃至3のいずれかに記載の歩行訓練装置。
【請求項5】
歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構の動作状態を制御する制御部と、
歩行訓練者に装着された歩行動作補助装置と前記制御部とを通信可能に接続する通信手段と、
を備え、
前記調整機構は、前記歩行動作補助装置からの制御信号により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする歩行訓練装置。
【請求項6】
前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする請求項5に記載の歩行訓練装置。
【請求項7】
前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする請求項5または6に記載の歩行訓練装置。
【請求項8】
前記複数の支持脚の夫々に前記支持脚に作用する荷重を検出する複数の荷重センサとを有し、
前記通信手段は、前記複数の荷重センサにより検出された検出値を前記歩行動作補助装置の制御装置に送信し、当該歩行訓練者が前記把持部を把持しながら歩行する際の前記複数の荷重センサにより検出された各検出値の左右方向の差に応じて前記歩行動作補助装置が当該歩行訓練者に付与される左脚アシスト力と右脚アシスト力とが各検出値とバランスするように制御させることを特徴とする請求項5乃至7の何れかに記載の歩行訓練装置。
【請求項1】
歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構を操作するための操作部と、を備え、
前記調整機構は、前記操作部の操作により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする歩行訓練装置。
【請求項2】
前記操作部を前記把持部に設け、
前記把持部を把持している歩行訓練者が前記操作部を操作することにより、前記調整機構が前記把持部の位置を任意の高さ位置に調整することを特徴とする請求項1に記載の歩行訓練装置。
【請求項3】
前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする請求項1または2に記載の歩行訓練装置。
【請求項4】
前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする請求項1乃至3のいずれかに記載の歩行訓練装置。
【請求項5】
歩行訓練者に把持される把持部と、該把持部を所定高さに支持する複数の支持脚と、該支持脚の下端に設けられた車輪とを有する歩行訓練装置において、
前記支持脚の長さを任意の長さに調整する調整機構と、
前記調整機構の動作状態を制御する制御部と、
歩行訓練者に装着された歩行動作補助装置と前記制御部とを通信可能に接続する通信手段と、
を備え、
前記調整機構は、前記歩行動作補助装置からの制御信号により当該歩行訓練者が座位状態から立上がる訓練を行なう際には、前記把持部の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また当該歩行訓練者が立位状態で歩行訓練する際には前記把持部の高さ位置を立位状態で把持しやすい高さ位置に上昇させることを特徴とする歩行訓練装置。
【請求項6】
前記調整機構は、
前記支持脚の延在方向に伸縮可能な伸縮部と、
前記伸縮部を所定長さに伸縮動作させるための駆動力を発生する駆動部と、
を有することを特徴とする請求項5に記載の歩行訓練装置。
【請求項7】
前記調整機構は、
前記支持脚を上部と下部とに分割し、前記支持脚の上部と前記支持脚の下部との間に設けられ前記支持脚の長さを調整するガススプリングを有することを特徴とする請求項5または6に記載の歩行訓練装置。
【請求項8】
前記複数の支持脚の夫々に前記支持脚に作用する荷重を検出する複数の荷重センサとを有し、
前記通信手段は、前記複数の荷重センサにより検出された検出値を前記歩行動作補助装置の制御装置に送信し、当該歩行訓練者が前記把持部を把持しながら歩行する際の前記複数の荷重センサにより検出された各検出値の左右方向の差に応じて前記歩行動作補助装置が当該歩行訓練者に付与される左脚アシスト力と右脚アシスト力とが各検出値とバランスするように制御させることを特徴とする請求項5乃至7の何れかに記載の歩行訓練装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−103079(P2013−103079A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250797(P2011−250797)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
[ Back to top ]